Сервопривод — это мотор-редуктор, способный поворачивать выходной вал в заданное положение (на заданный угол) и удерживать его в этом положении, вопреки сопротивлениям и возмущениям. Сервопривод Tower Pro 9g SG90 не имеет мощные характеристики (всего 1,2-1,6 кг*см), но имеет недорогую цену. Отлично подходит для управления небольшими легкими механизмами под управлением контроллеров Arduino, Raspberry Pi и т.п.. Рабочее напряжение Tower Pro 9g SG90 от 3В до 7.2В, угол поворота ограничен диапазоном от 0 до 180 градусов (в реальность — чуть больше).

В этой статье будем управлять сервоприводом SG90 с помощью PCA9685 из Python на Orange Pi PC. Можно использовать Raspberry Pi, Banana Pi, NanoPi или любой другой мини-компьютер под управлением ОС Linux имеющий I2C порт.
Библиотека на Python для PCA9685
Поскольку библиотека Adafruit_Python_PCA9685 для работы с PCA9685 из Python работает только на Raspberry Pi, она была переписана так, чтобы ее можно было использовать на Orange Pi и Banana Pi. Теперь используется SMBus в качестве I2C драйвера, как установить тут: SMBus: Работа с шиной I2C на Python в Raspberry Pi/Orange Pi/Banana Pi.
Файл PCA9685.py
import logging
import time
import math
# Based on Adafruit Lib:
# https://github.com/adafruit/Adafruit_Python_PCA9685/blob/master/Adafruit_PCA9685/PCA9685.py
# Default address:
PCA9685_ADDRESS = 0x40
# Registers/etc:
MODE1 = 0x00
MODE2 = 0x01
SUBADR1 = 0x02
SUBADR2 = 0x03
SUBADR3 = 0x04
PRESCALE = 0xFE
LED0_ON_L = 0x06
LED0_ON_H = 0x07
LED0_OFF_L = 0x08
LED0_OFF_H = 0x09
ALL_LED_ON_L = 0xFA
ALL_LED_ON_H = 0xFB
ALL_LED_OFF_L = 0xFC
ALL_LED_OFF_H = 0xFD
# Bits:
RESTART = 0x80
SLEEP = 0x10
ALLCALL = 0x01
INVRT = 0x10
OUTDRV = 0x04
# Channels
CHANNEL00 = 0x00
CHANNEL01 = 0x01
CHANNEL02 = 0x02
CHANNEL03 = 0x03
CHANNEL04 = 0x04
CHANNEL05 = 0x05
CHANNEL06 = 0x06
CHANNEL07 = 0x07
CHANNEL08 = 0x08
CHANNEL09 = 0x09
CHANNEL10 = 0x0A
CHANNEL11 = 0x0B
CHANNEL12 = 0x0C
CHANNEL13 = 0x0D
CHANNEL14 = 0x0E
CHANNEL15 = 0x0F
class PCA9685(object):
def __init__(self, i2cBus, address=PCA9685_ADDRESS):
self.i2cBus = i2cBus
self.address = address
self.begin()
def begin(self):
"""Initialize device"""
self.set_all_pwm(0, 0)
self.i2cBus.write_byte_data(self.address, MODE2, OUTDRV)
self.i2cBus.write_byte_data(self.address, MODE1, ALLCALL)
time.sleep(0.005) # wait for oscillator
mode1 = self.i2cBus.read_byte_data(self.address, MODE1)
mode1 = mode1 & ~SLEEP # wake up (reset sleep)
self.i2cBus.write_byte_data(self.address, MODE1, mode1)
time.sleep(0.005) # wait for oscillator
def reset(self):
self.i2cBus.write_byte_data(self.address, MODE1, RESTART)
time.sleep(0.01)
def set_address(self, address):
"""Sets device address."""
self.address = address
def set_i2c_bus(self, i2cBus):
"""Sets I2C Bus."""
self.i2cBus = i2cBus
def set_pwm(self, channel, on, off):
"""Sets a single PWM channel."""
self.i2cBus.write_byte_data(self.address, LED0_ON_L + 4 * channel, on & 0xFF)
self.i2cBus.write_byte_data(self.address, LED0_ON_H + 4 * channel, on >> 8)
self.i2cBus.write_byte_data(self.address, LED0_OFF_L + 4 * channel, off & 0xFF)
self.i2cBus.write_byte_data(self.address, LED0_OFF_H + 4 * channel, off >> 8)
def set_all_pwm(self, on, off):
"""Sets all PWM channels."""
self.i2cBus.write_byte_data(self.address, ALL_LED_ON_L, on & 0xFF)
self.i2cBus.write_byte_data(self.address, ALL_LED_ON_H, on >> 8)
self.i2cBus.write_byte_data(self.address, ALL_LED_OFF_L, off & 0xFF)
self.i2cBus.write_byte_data(self.address, ALL_LED_OFF_H, off >> 8)
def set_pwm_freq(self, freq_hz):
"""Set the PWM frequency to the provided value in hertz."""
prescaleval = 25000000.0 # 25MHz
prescaleval /= 4096.0 # 12-bit
prescaleval /= float(freq_hz)
prescaleval -= 1.0
prescale = int(math.floor(prescaleval + 0.5))
oldmode = self.i2cBus.read_byte_data(self.address, MODE1)
newmode = (oldmode & 0x7F) | 0x10 # sleep
self.i2cBus.write_byte_data(self.address, MODE1, newmode) # go to sleep
self.i2cBus.write_byte_data(self.address, PRESCALE, prescale)
self.i2cBus.write_byte_data(self.address, MODE1, oldmode)
time.sleep(0.005)
self.i2cBus.write_byte_data(self.address, MODE1, oldmode | 0x80)
def __enter__(self):
return self
def __exit__(self, exception_type, exception_value, traceback):
self.reset()
Описание методов (функций)
__init__()
Конструктор класса.
__init__(self, i2cBus, address=PCA9685_ADDRESS)
Параметры
i2cBus — Объект типа PCA9685.
address — I2C адрес устройства. По умолчанию PCA9685_ADDRESS = 0x40.
begin()
Инициализация устройства.
begin(self)
set_address()
Установка адреса устройства.
set_address(self, address)
Параметры
address — I2C адрес устройства.
set_i2c_bus()
Установка I2C шины.
set_i2c_bus(self, i2cBus)
Параметры
i2cBus — Объект типа PCA9685.
set_pwm()
Устанавливает ШИМ одного из выводов PCA9685.
set_pwm(self, channel, on, off)
Параметры
channel — Один из выводов PWM от 0 до 15.
on — В какой момент цикла из 4096 частей включить ШИМ.
off — В какой момент цикла из 4096 частей выключить ШИМ.
set_all_pwm()
Устанавливает ШИМ на все выводы PCA9685.
set_all_pwm(self, on, off)
Параметры
on — В какой момент цикла из 4096 частей включить ШИМ.
off — В какой момент цикла из 4096 частей выключить ШИМ.
set_pwm_freq()
Устанавливает частоту ШИМ для всего чипа, до ~ 1,6 кГц.
set_pwm_freq(self, freq_hz)
Параметры
freq_hz — Частота в Герцах.
Библиотека на Python для сервоприводов
Для более удобного управления сервоприводом, основные функции были собраны в одном классе — ServoPCA9685. Тут можно найти минимальную (servo_min = 130) и максимальную (servo_max = 510) длину импульса для безопасного управления сервоприводом SG90.
# Configure min and max servo pulse lengths servo_min = 130 servo_max = 510
Если ваш сервопривод работает с другими значениями, тогда вы можете редактировать их.
Файл ServoPCA9685.py
import time
# Servo with PCA9685 implementation
# Configure min and max servo pulse lengths
servo_min = 130 # Min pulse length out of 4096 / 150/112
servo_max = 510 # Max pulse length out of 4096 / 600/492
def map(x, in_min, in_max, out_min, out_max):
return (x - in_min) * (out_max - out_min + 1) / (in_max - in_min + 1) + out_min
class ServoPCA9685(object):
def __init__(self, pca9685, channel):
self.pca9685 = pca9685
self.channel = channel
self.set_pwm_freq(50)
self.set_pulse(300)
def set_pwm_freq(self, freq=50):
self.pca9685.set_pwm_freq(freq)
time.sleep(0.005)
def set_angle(self, angle):
self.set_pulse(map(angle, 0, 180, servo_min, servo_max))
def set_pulse(self, pulse):
if pulse >= servo_min and pulse <= servo_max:
self.pca9685.set_pwm(self.channel, 0, pulse)
time.sleep(0.005)
def disable(self):
self.pca9685.set_pwm(self.channel, 0, 0)
time.sleep(0.005)
Описание методов (функций)
__init__()
Конструктор класса.
__init__(self, pca9685, channel)
pca9685 — Объект типа PCA9685.
channel — Один из ШИМ выводов PCA9685 от 0 до 15.
set_pwm_freq()
Установка частоты ШИМ для вашего сервопривода.
set_pwm_freq(self, freq=50)
freq — Частота в Герцах. По умолчанию freq=50.
set_angle()
Установка примерного угла сервопривода.
set_angle(self, angle)
angle — Угол от 0 до 180 градусов.
set_pulse()
Установка длины импульса.
set_pulse(self, pulse)
pulse — Длина ШИМ импульса.
disable()
Отключение сервопривода (установка длины импульса в ноль «0»).
disable(self)
Примеры программ
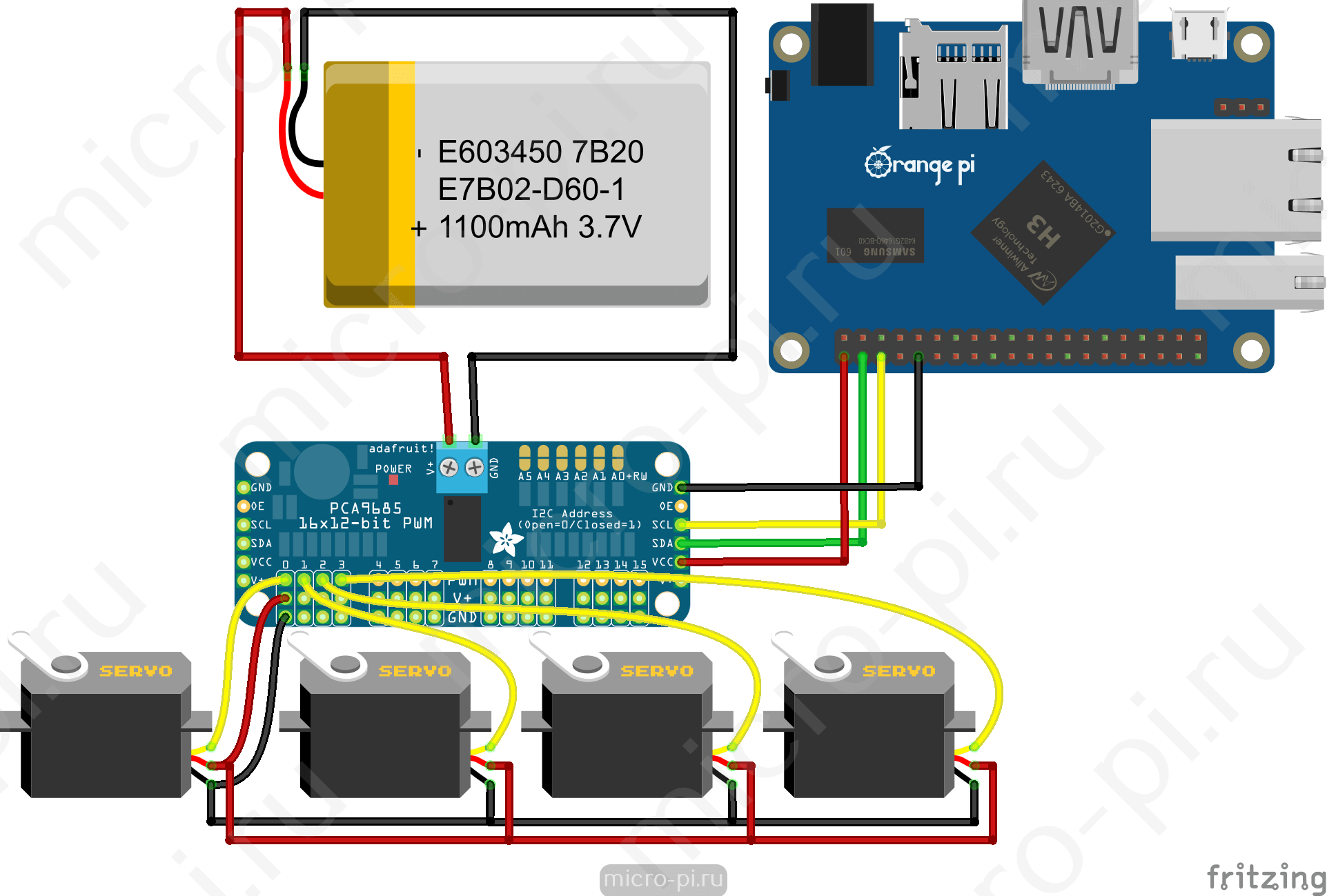
Схема подключения сервопривода SG90 к PCA9685
 Управление одним сервоприводом SG90
Управление одним сервоприводом SG90
Чтобы управлять сервоприводом посредством PCA9685 нужно соблюдать следующие шаги:
- Нужно открыть шину I2C «0» (или «1»);
i2cBus = smbus.SMBus(0)
- Создаём объект класса
PCA9685, а в качестве параметра конструктора используем выше созданный объект:i2cBus;pca9685 = PCA9685.PCA9685(i2cBus)
- Создаём объект класса
ServoPCA9685для управления одного сервопривода, в качестве первого параметра используем выше созданный объект,pca9685, а второй параметр — это номер канала PCA9685, можно выбрать следующие значения:PCA9685.CHANNEL00,PCA9685.CHANNEL01,PCA9685.CHANNEL02, …,PCA9685.CHANNEL15или номера от 0 до 15;servo00 = ServoPCA9685.ServoPCA9685(pca9685, PCA9685.CHANNEL00)
- Для управления сервоприводом можно использовать два метода, а именно:
set_pulse(pulse), гдеpulse— это длина ШИМ импульса отservo_min = 130доservo_max = 510; иset_angle(angle), гдеangle— это угол поворота от 0 до 180 градусов, метод (функция) пропорционально переносит значение из текущего диапазона значений в градусах (от 0 до 180) в новый диапазон (от 130 до 510) в импульсах.
Нижеприведённый пример кода поварачивает сервопривод в одну сторону,
# 130 -> 510
for pulse in range(ServoPCA9685.servo_min, ServoPCA9685.servo_max + 1):
servo00.set_pulse(pulse)
time.sleep(0.01)
потом в другую
# 510 -> 130
for pulse in reversed(range(ServoPCA9685.servo_min, ServoPCA9685.servo_max + 1)):
servo00.set_pulse(pulse)
time.sleep(0.01)
с использованием метода set_pulse(pulse), а в конце отключает подаваемый на сервопривод ШИМ.
servo00.disable()
Файл servo_1x_pulse.py
Пример управления сервоприводом используя метод set_pulse(pulse).
import time
import smbus
import PCA9685
import ServoPCA9685
i2cBus = smbus.SMBus(0)
pca9685 = PCA9685.PCA9685(i2cBus)
servo00 = ServoPCA9685.ServoPCA9685(pca9685, PCA9685.CHANNEL00)
# 130 -> 510
for pulse in range(ServoPCA9685.servo_min, ServoPCA9685.servo_max + 1):
servo00.set_pulse(pulse)
time.sleep(0.01)
# 510 -> 130
for pulse in reversed(range(ServoPCA9685.servo_min, ServoPCA9685.servo_max + 1)):
servo00.set_pulse(pulse)
time.sleep(0.01)
servo00.disable()
Файл servo_1x_angle.py
Пример управления сервоприводом используя метод set_angle(angle).
import time
import smbus
import PCA9685
import ServoPCA9685
i2cBus = smbus.SMBus(0)
pca9685 = PCA9685.PCA9685(i2cBus)
servo00 = ServoPCA9685.ServoPCA9685(pca9685, PCA9685.CHANNEL00)
# 0 - > 180
for angle in range(0, 180 + 1):
servo00.set_angle(angle)
time.sleep(0.01)
# 180 -> 0
for angle in reversed(range(0, 180 + 1)):
servo00.set_angle(angle)
time.sleep(0.01)
servo00.disable()
Управление несколькими сервоприводами SG90
Управлять несколькими сервоприводами можно аналогичным способом, как и одним. Единственное отличие в том, что нужно создать для каждого сервопривода отдельный экземпляр класса ServoPCA9685. К примеру:
servo00 = ServoPCA9685.ServoPCA9685(pca9685, PCA9685.CHANNEL00) servo01 = ServoPCA9685.ServoPCA9685(pca9685, PCA9685.CHANNEL01) servo02 = ServoPCA9685.ServoPCA9685(pca9685, PCA9685.CHANNEL02) servo03 = ServoPCA9685.ServoPCA9685(pca9685, PCA9685.CHANNEL03)
каждый объект должен иметь отличное от других имя и свой собственный канал (от 0 до 15).
servo_Nx_pulse.py
Пример управления несколькими (четырьмя) сервоприводами используя метод set_pulse(pulse).
import time
import smbus
import PCA9685
import ServoPCA9685
i2cBus = smbus.SMBus(0)
pca9685 = PCA9685.PCA9685(i2cBus)
servo00 = ServoPCA9685.ServoPCA9685(pca9685, PCA9685.CHANNEL00)
servo01 = ServoPCA9685.ServoPCA9685(pca9685, PCA9685.CHANNEL01)
servo02 = ServoPCA9685.ServoPCA9685(pca9685, PCA9685.CHANNEL02)
servo03 = ServoPCA9685.ServoPCA9685(pca9685, PCA9685.CHANNEL03)
# 130 -> 510
for pulse in range(ServoPCA9685.servo_min, ServoPCA9685.servo_max + 1):
servo00.set_pulse(pulse)
servo01.set_pulse(pulse)
servo02.set_pulse(pulse)
servo03.set_pulse(pulse)
time.sleep(0.01)
# 510 -> 130
for pulse in reversed(range(ServoPCA9685.servo_min, ServoPCA9685.servo_max + 1)):
servo00.set_pulse(pulse)
servo01.set_pulse(pulse)
servo02.set_pulse(pulse)
servo03.set_pulse(pulse)
time.sleep(0.01)
servo00.disable()
servo01.disable()
servo02.disable()
servo03.disable()
Материалы
Все файлы в одном архиве (Скачать zip архив)
SMBus: Работа с шиной I2C на Python в Raspberry Pi/Orange Pi/Banana Pi
GitHub — adafruit/Adafruit_Python_PCA9685: Python code to use the PCA9685 PWM servo/LED controller with a Raspberry Pi or BeagleBone black.
Теперь роборуку можно собрать не только на Малинке, но и на апельсинке.
Большой выбор дженериков на сайте https://apteka-russia.ru с доставкой
во все регионы России по выгодным ценам
Дженерики для повышения потенции на сайте https://aptekaviagry.ru
высокое качество по доступной цене с доставкой
Купить дженерики недорого с доставкой https://apteka-x.ru/ высокое качество
по выгодным ценам гарантия от производителя
https://arenda-t.ru
https://bal-ufa.ru/
https://baum34.ru
Большой выбор дженериков в магазине https://best-viagra.ru с доставкой
по городу и области
Продажа дженериков на сайте https://buy-generic.ru производства Индии
по привлекательной цене с доставкой
Продажа качественных дженериков на сайте https://buytablets.ru/ с бесплатной
доставкой в день покупки
https://champion-sport.ru
Широкий выбор дженериков на сайте https://cialis24.ru с доставкой курьером
в день заказа отправка в регионы России
Магазин дженериков https://cialisbrand.ru/ большой выбор низкие
цены быстрая доставка по городу отправка в регионы почтой России
Магазин дженериков по адресу https://cialis-deshevo.ru предлагает
широкий выбор препаратов для повышения потенции с доставкой
Дженерики на сайте https://cialis-hit.ru/ с доставкой по городу курьером
в день заказа отличное качество по низкой цене
Магазин дженериков https://cialismoscow.ru высокое качество по доступной цене
производство Индии в наличии
https://cpcspb.ru
https://cvetocheg.ru
Качественные дженерики в магазине https://dapoxetine-60mg.ru/ с доставкой
по городу и области в день покупки
Большой выбор дженериков на сайте https://dickfix.ru/ доступная цена
высокое качество производства Индии
Ремонт авто в автосервисе в
Санкт-Петербурге — это ответственный процесс, который
требует профессионального подхода и внимания
к деталям. Поэтому выбирайте автосервис с умом и не забывайте о
своей безопасности на дороге.
цены автосервисов
Ветошь — это старые тряпки, которые обрели новую
жизнь благодаря мастерам искусства.
В Санкт-Петербурге ветошь стала неотъемлемой
частью многих художественных проектов и мастерских.
Мастера создают из нее удивительные вещи — ковры, сумки, одежду, аксессуары.
Они используют ветошь как материал для творчества, придавая ей новую жизнь и
статус.
ветошь оптом цена
https://cghooker.com/agra/
Hi to every one, for the reason that I am genuinely eager of reading this blog’s post to be updated daily.
It carries fastidious information.
Take a look at my site: thriving brands
I must thank you for the efforts you have put in writing this blog.
I really hope to view the same high-grade content from you later on as well.
In truth, your creative writing abilities has encouraged me to get
my own, personal site now 😉
Also visit my blog :: online marketing consultancy
If you desire to improve your knowledge only keep visiting this web page and be
updated with the most up-to-date gossip posted here.
Review my site best internet marketing agency
I seriously love your site.. Pleasant colors & theme. Did you develop this site yourself?
Please reply back as I’m looking to create my very own website and
would like to know where you got this from or exactly what
the theme is named. Kudos!
Feel free to visit my homepage … digital content creation agency
I really love your blog.. Very nice colors & theme. Did you develop this
web site yourself? Please reply back as I’m looking to create
my own personal website and would like to learn where you
got this from or just what the theme is named. Kudos!
Feel free to surf to my page :: international marketing agency
This is a great tip particularly to those fresh to the blogosphere.
Simple but very accurate info… Many thanks for
sharing this one. A must read post!
Feel free to visit my page … item644254950
Woah! I’m really loving the template/theme of this
blog. It’s simple, yet effective. A lot of times it’s very
hard to get that «perfect balance» between usability
and visual appearance. I must say you have done a very good job
with this. In addition, the blog loads very quick for me on Safari.
Excellent Blog!
[https://seekbra.com/bhopal] [https://seekbra.com/mumbai] [https://seekbra.com/delhi] [https://seekbra.com/bangalore] [https://seekbra.com/hyderabad] [https://seekbra.com/ahmedabad] [https://seekbra.com/chennai] [https://seekbra.com/kolkata] [https://seekbra.com/surat] [https://seekbra.com/pune] [https://seekbra.com/jaipur] [https://seekbra.com/lucknow] [https://seekbra.com/kanpur] [https://seekbra.com/nagpur] [https://seekbra.com/indore] [https://seekbra.com/thane] [https://seekbra.com/visakhapatnam] [https://seekbra.com/patna] [https://seekbra.com/vadodara] [https://seekbra.com/ghaziabad] [https://seekbra.com/ludhiana] [https://seekbra.com/agra] [https://seekbra.com/nashik] [https://seekbra.com/faridabad] [https://seekbra.com/meerut] [https://seekbra.com/rajkot] [https://seekbra.com/kalyan] [https://seekbra.com/varanasi] [https://seekbra.com/aurangabad] [https://seekbra.com/dhanbad] [https://seekbra.com/amritsar] [https://seekbra.com/prayagraj] [https://seekbra.com/ranchi] [https://seekbra.com/jabalpur] [https://seekbra.com/gwalior] [https://seekbra.com/coimbatore] [https://seekbra.com/vijayawada] [https://seekbra.com/jodhpur] [https://seekbra.com/madurai] [https://seekbra.com/raipur] [https://seekbra.com/kota] [https://seekbra.com/amaravati] [https://seekbra.com/itanagar] [https://seekbra.com/dispur] [https://seekbra.com/goa] [https://seekbra.com/panaji] [https://seekbra.com/gandhinagar] [https://seekbra.com/chandigarh] [https://seekbra.com/shimla] [https://seekbra.com/thiruvananthapuram] [https://seekbra.com/imphal] [https://seekbra.com/shillong] [https://seekbra.com/aizawl] [https://seekbra.com/kohima] [https://seekbra.com/bhubaneswar] [https://seekbra.com/gangtok] [https://seekbra.com/agartala] [https://seekbra.com/dehradun] [https://seekbra.com/kathmandu] [https://seekbra.com/pokhara] [https://seekbra.com/butwal] [https://seekbra.com/srinagar] [https://seekbra.com/jammu] [https://seekbra.com/pondicherry] [https://seekbra.com/port-blair] [https://seekbra.com/daman] [https://seekbra.com/diu] [https://seekbra.com/silvassa] [https://seekbra.com/leh] [https://seekbra.com/kargil] [https://seekbra.com/ladakh] [https://seekbra.com/kavaratti] [https://seekbra.com/guwahati] [https://seekbra.com/solapur] [https://seekbra.com/moradabad] [https://seekbra.com/mysore] [https://seekbra.com/bareilly] [https://seekbra.com/gurgaon] [https://seekbra.com/aligarh] [https://seekbra.com/jalandhar] [https://seekbra.com/salem] [https://seekbra.com/bhiwandi] [https://seekbra.com/saharanpur] [https://seekbra.com/gorakhpur] [https://seekbra.com/bikaner] [https://seekbra.com/amravati] [https://seekbra.com/noida] [https://seekbra.com/jamshedpur] [https://seekbra.com/bhilai] [https://seekbra.com/cuttack] [https://seekbra.com/firozabad] [https://seekbra.com/kochi] [https://seekbra.com/bhavnagar] [https://seekbra.com/durgapur] [https://seekbra.com/asansol] [https://seekbra.com/rourkela] [https://seekbra.com/nanded] [https://seekbra.com/kolhapur] [https://seekbra.com/ajmer] [https://seekbra.com/akola] [https://seekbra.com/gulbarga] [https://seekbra.com/jamnagar] [https://seekbra.com/ujjain] [https://seekbra.com/siliguri] [https://seekbra.com/jhansi] [https://seekbra.com/mangalore] [https://seekbra.com/malegaon] [https://seekbra.com/gaya] [https://seekbra.com/jalgaon] [https://seekbra.com/udaipur] [https://seekbra.com/kozhikode] [https://seekbra.com/kurnool] [https://seekbra.com/patiala] [https://seekbra.com/bhagalpur] [https://seekbra.com/rohtak] [https://seekbra.com/mathura]
I all the time used too read paragtaph in news papers but now as I am a user
oof internet thus from now I am using net
for articles, thanks tto web.
1xbet промокод при регистрации
At this time it looks like Drupal is the best blogging platform available right now.
(from what I’ve read) Is that what you are using on your blog?
You are so awesome! I do not suppose I have read through anything like
this before. So wonderful to find somebody with original thoughts on this subject matter.
Really.. thank you for starting this up. This website
is one thing that is needed on the web, someone with a bit
of originality!
I am truly grateful to the owner of this website who has
shared this impressive piece of writing at at this place.
Feel free to surf to my blog: provadent at walmart
https://centrepointmall.co.kr/%eb%aa%a8%ea%b8%b0%ec%9e%a5%ed%85%90%ed%8a%b8-%ec%b6%94%ec%b2%9c%ec%88%9c%ec%9c%84-10%ec%84%a0-2022%eb%85%84-9%ec%9b%944%ec%a3%bc%ec%b0%a8/은 현재 많은 사람들에게 중요한 이슈로 떠오르고 있습니다.
Very good post! We are linking to this great article on our
site. Keep up the good writing.
Does your website have a contact page? I’m having trouble locating it but, I’d like to send you an email.
I’ve got some creative ideas for your blog you might
be interested in hearing. Either way, great website and I look
forward to seeing it grow over time.
Потрепанная ветошь: новая жизнь старых вещей
https://vetosh-optom.clients.site
This design is wicked! You definitely know how
to keep a reader amused. Between your wit and your videos, I was almost moved
to start my own blog (well, almost…HaHa!) Great job.
I really loved what you had to say, and more than that, how you presented it.
Too cool!
You explained it superbly!
При строительстве дома под ключ важно учитывать множество факторов, начиная от выбора материала для строительства. Один из самых популярных материалов для строительства домов — это кирпич. Кирпичный дом обладает высокой прочностью и долговечностью, что делает его отличным выбором для строительства в условиях северных климатов.
https://saxcarwash.co.nz/ozone-treatment-2/
It’s very simple to find out any topic on web as compared to textbooks,
as I found this piece of writing at this web page.
my blog post; does lipozem work
Your style is so unique compared to other folks I have
read stuff from. Thank you for posting when you have the opportunity, Guess
I will just book mark this blog.
Hi there excellent blog! Does running a blog similar
to this take a large amount of work? I have virtually no understanding of coding however
I had been hoping to start my own blog soon. Anyway, if you have any recommendations or tips for new blog owners please share.
I know this is off topic but I simply had to ask.
Thanks a lot!
What a information of un-ambiguity and preserveness of valuable experience about unpredicted feelings.
При строительстве дома под ключ важно учитывать множество факторов, начиная от выбора материала для строительства. Один из самых популярных материалов для строительства домов — это кирпич. Кирпичный дом обладает высокой прочностью и долговечностью, что делает его отличным выбором для строительства в условиях северных климатов.
https://www.google.com.sl/amp/yseoul.com%2Fbbs%2Fboard.php%3Fbo_table%3Dfree%26wr_id%3D339880
What’s up, of course this piece of writing is in fact nice
and I have learned lot of things from it concerning blogging.
thanks.
Here is my blog :: the brain money wave
Hi there I am so delighted I found your blog page, I really found
you by accident, while I was browsing on Digg for something else, Regardless I am here now
and would just like to say thanks a lot for a tremendous post and a all round exciting blog (I
also love the theme/design), I don’t have time to look over it all at the moment but I have bookmarked it
and also added in your RSS feeds, so when I have time I will be back to read a great deal more, Please do
keep up the superb work.
Feel free to surf to my blog — the growth matrix legit
Very good article. I’m going through a few of
these issues as well..
My site: nanodefense pro
При строительстве дома под ключ важно учитывать множество факторов, начиная от выбора материала для строительства. Один из самых популярных материалов для строительства домов — это кирпич. Кирпичный дом обладает высокой прочностью и долговечностью, что делает его отличным выбором для строительства в условиях северных климатов.
https://www.bausch.kr-%26gt;atlas.Monaxikoslykos@www.bausch.kr/ko-kr/redirect/?url=https://shaktisoul.me/2019/03/06/benned_elo_shakti_ero/%3Flang=en
Chất lượng video sắc nét, âm thanh sống
động, mang đến trải nghiệm xem phim tuyệt vời.
|
Giao diện đẹp mắt, trực quan, dễ sử dụng, giúp
mình nhanh chóng tìm thấy những bộ phim mình muốn xem.
|
Chất lượng video sắc nét, âm thanh sống động, mang đến trải nghiệm xem phim tuyệt vời.
|
Chất lượng video sắc nét, âm thanh sống động,
mang đến trải nghiệm xem phim tuyệt vời.
MotChill TVB thực sự là một thiên đường dành cho những tín đồ phim ảnh.
Kho phim khổng lồ, đa dạng thể loại, từ phim kinh điển đến phim hiện đại, từ phim
hài hước đến phim tình cảm, giúp tôi có thể thỏa
sức khám phá và tìm kiếm những bộ phim yêu thích.
| Giao diện thân thiện, dễ sử dụng, giúp tôi nhanh chóng tìm thấy những bộ
phim muốn xem. | Chất lượng video sắc nét, âm thanh
sống động, mang đến trải nghiệm xem phim tuyệt vời.
| Mình đặc biệt thích tính năng xem phim ngoại tuyến,
giúp mình có thể xem phim mọi lúc mọi nơi, kể cả khi không có kết nối internet.
| Tuy nhiên, mình mong trang web sẽ sớm có thêm tính năng tương tác với cộng đồng, như bình luận, đánh giá phim để tạo ra một cộng đồng người
yêu phim sôi động.
|Mình đã thử qua nhiều trang web xem phim khác nhau nhưng MotChill
TVB vẫn là lựa chọn số một của mình.
Kho phim phong phú, chất lượng cao, cùng với giao diện đẹp mắt, thân thiện đã chinh
phục được mình ngay từ lần đầu sử dụng.
| Mình đặc biệt thích tính năng gợi ý phim thông minh, giúp mình khám phá ra nhiều bộ phim hay ho mà
mình chưa từng biết đến. | Chất lượng video ổn định, không bị giật lag, giúp mình có thể xem phim
một cách thoải mái. | Tuy nhiên, mình mong trang web sẽ sớm
có thêm tùy chọn lựa chọn chất lượng video để tiết kiệm dung lượng.
| Mình sẽ giới thiệu MotChill TVB cho tất cả những người
yêu thích phim.
|MotChill TVB là một trong những trang web xem phim trực tuyến tốt nhất mà mình từng biết.
Kho phim đa dạng, từ phim truyền hình đến phim điện ảnh, từ
phim Việt Nam đến phim nước ngoài, đáp ứng mọi nhu cầu của
người xem. | Giao diện đẹp mắt, trực quan, dễ sử dụng,
giúp mình nhanh chóng tìm thấy những bộ phim mình muốn xem.
| Chất lượng video sắc nét, âm thanh sống động, mang đến trải nghiệm xem phim
tuyệt vời. | Mình đặc biệt thích tính năng xem phim ngoại tuyến, giúp mình có thể xem phim mọi lúc mọi nơi.
| Tuy nhiên, mình mong trang web sẽ sớm có thêm tùy chọn lựa chọn chất lượng video để tiết kiệm
dung lượng.
|Mình đã dành rất nhiều thời gian để khám phá MotChill TVB và thực sự ấn tượng
với những gì mà trang web này mang lại.
Kho phim phong phú, đa dạng thể loại, từ phim kinh điển đến phim mới nhất,
giúp mình luôn có những lựa chọn giải trí thú vị.
| Giao diện thân thiện, dễ sử dụng, giúp
mình nhanh chóng tìm thấy những bộ phim mình
muốn xem. | Chất lượng video sắc nét, âm thanh sống động, mang đến trải nghiệm xem phim chân thực nhất.
| Mình đặc biệt thích tính năng tìm kiếm thông minh, giúp mình tìm thấy những bộ phim mình yêu thích một cách nhanh chóng.
| Tuy nhiên, mình mong trang web sẽ sớm có thêm
phụ đề đa ngôn ngữ để phục vụ nhiều đối tượng khán giả hơn.
|MotChill TVB là một trong những trang web xem phim trực tuyến miễn phí
tốt nhất mà mình từng biết. Kho phim đa dạng, chất lượng cao, giúp
mình có thể thưởng thức những bộ phim yêu thích một cách thoải
mái. | Giao diện đẹp mắt, trực quan, dễ sử dụng, giúp mình nhanh chóng tìm thấy những bộ phim mình muốn xem.
| Chất lượng video ổn định, không bị giật
lag, giúp mình có thể xem phim một cách mượt
mà. | Mình đặc biệt thích tính năng lịch sử xem phim, giúp mình dễ
dàng tiếp tục xem những bộ phim đã xem dở.
| Tuy nhiên, mình mong trang web sẽ sớm có thêm tính
năng tương tác với cộng đồng, như bình luận, đánh giá phim để tạo ra một cộng đồng người yêu phim sôi động.
|Mình đã trở thành fan cứng của MotChill TVB sau khi trải nghiệm qua nhiều tính năng hấp dẫn của trang web.
Kho phim đa dạng, chất lượng video cao,
giao diện thân thiện là những điểm cộng lớn của MotChill TVB.
| Mình đặc biệt thích tính năng gợi ý phim thông minh,
giúp mình khám phá ra nhiều bộ phim hay ho và phù hợp
với sở thích của mình. | Tuy nhiên, mình mong trang web sẽ
sớm có thêm tùy chọn lựa chọn chất lượng video để tiết kiệm dung lượng.
| Mình sẽ giới thiệu MotChill TVB cho bạn bè
và người thân của mình.
|MotChill TVB là một trong những trang web xem phim trực tuyến tốt nhất mà mình từng biết.
Kho phim phong phú, đa dạng thể loại, từ phim truyền hình đến phim điện ảnh, từ phim
Việt Nam đến phim nước ngoài, đáp ứng mọi nhu cầu của người xem.
| Giao diện đẹp mắt, trực quan, dễ sử dụng, giúp mình nhanh chóng tìm thấy những bộ phim mình muốn xem.
| Chất lượng video sắc nét, âm thanh sống động, mang đến trải nghiệm xem phim tuyệt vời.
| Mình đặc biệt thích tính năng xem phim ngoại tuyến, giúp mình có thể xem phim mọi lúc
mọi nơi. | Tuy nhiên, mình mong trang web sẽ
sớm có thêm tùy chọn lựa chọn chất lượng video để
tiết kiệm dung lượng.
|Mình đã dành rất nhiều thời gian để khám phá MotChill TVB và thực sự ấn tượng với những gì mà trang web
này mang lại. Kho phim phong phú, đa dạng thể
loại, từ phim kinh điển đến phim mới nhất, giúp mình luôn có
những lựa chọn giải trí thú vị. | Giao
diện thân thiện, dễ sử dụng, giúp mình nhanh chóng
tìm thấy những bộ phim mình muốn xem. | Chất lượng video sắc nét, âm thanh sống động,
mang đến trải nghiệm xem phim chân thực nhất.
| Mình đặc biệt thích tính năng tìm kiếm
thông minh, giúp mình tìm thấy những bộ phim mình yêu thích một cách nhanh chóng.
| Tuy nhiên, mình mong trang web sẽ sớm có thêm phụ đề đa ngôn ngữ để phục vụ nhiều đối tượng khán giả hơn.
|MotChill TVB là một trong những trang web xem phim trực tuyến miễn phí tốt
nhất mà mình từng biết. Kho phim đa dạng, chất lượng
cao, giúp mình có thể thưởng thức những bộ
phim yêu thích một cách thoải mái.
| Giao diện đẹp mắt, trực quan, dễ sử dụng, giúp mình
nhanh chóng tìm thấy những bộ phim mình muốn xem.
| Chất lượng video ổn định, không bị giật lag, giúp mình có thể
xem phim một cách mượt mà. | Mình đặc biệt thích tính năng lịch sử xem phim, giúp mình dễ dàng tiếp tục
xem những bộ phim đã xem dở. | Tuy nhiên, mình mong trang web sẽ sớm có thêm tính năng
tương tác với cộng đồng, như bình luận, đánh giá phim
để tạo ra một cộng đồng người yêu phim
sôi động.
|Mình đã trở thành fan cứng của MotChill TVB sau khi trải nghiệm qua nhiều tính năng hấp dẫn của trang web.
Kho phim đa dạng, chất lượng video cao, giao diện thân thiện là những điểm cộng lớn của
MotChill TVB. | Mình đặc biệt thích tính năng gợi ý phim thông minh, giúp mình khám phá ra nhiều
bộ phim hay ho và phù hợp với sở thích của mình.
| Tuy nhiên, mình mong trang web sẽ sớm có thêm tùy chọn lựa chọn chất lượng video để tiết kiệm dung lượng.
| Mình sẽ giới thiệu MotChill TVB cho bạn bè và người thân của mình.|
The beautiful, intuitive interface makes it easy for me to quickly find the movies I want
to watch. | The video quality on MotChill TVB is stable, with no lag, allowing me to watch movies smoothly.
| MotChill TVB is truly one of the best free online movie websites I’ve ever known. The diverse and high-quality movie collection allows me to enjoy my favorite films at ease.
| Sharp video quality and lively sound create a realistic movie-watching
experience. | MotChill TVB has become an indispensable part of my life.
Whenever I have free time, I spend it exploring new movies on this
website.
| MotChill TVB truly is a paradise for movie buffs.
Its massive collection, diverse in genre, from classics to modern films,
from comedies to romance, lets me explore and find
my favorite movies. | The friendly and easy-to-use interface makes it quick for me
to find the movies I want to watch. | Sharp video quality and lively sound offer a great movie-watching experience.
| I especially love the offline viewing feature, which allows me
to watch movies anytime, anywhere, even without an internet connection. | However, I hope the site will soon add community interaction features, like comments
and movie ratings, to build a vibrant movie-loving community.
|I’ve tried many other movie websites, but MotChill TVB remains my top choice.
The rich and high-quality movie collection, along with a beautiful, user-friendly interface,
won me over from the first use. | I especially love the smart movie suggestion feature, which helps
me discover many great films I’ve never known before. | Stable video quality, with no
lag, ensures a smooth viewing experience. | However, I
hope the site will soon add a video quality selection option to save data.
| I will recommend MotChill TVB to all my movie-loving friends.
|MotChill TVB is one of the best online movie websites I’ve ever known. The diverse movie
collection, from TV shows to feature films, from Vietnamese to international movies, meets all viewer
needs. | The beautiful, intuitive interface makes it easy for me to quickly find
the films I want to watch. | Sharp video quality and lively sound bring
an excellent movie-watching experience. | I particularly
enjoy the offline viewing feature, allowing me to watch movies anytime, anywhere.
| However, I hope the site will soon offer a video quality
selection option to save data.
|I’ve spent a lot of time exploring MotChill TVB and am truly impressed
with what this website has to offer. The diverse, rich
collection, from classic to the latest films, always gives me exciting entertainment
choices. | The friendly, easy-to-use interface makes it quick for me
to find the films I want to watch. | Sharp video quality and
vibrant sound deliver the most realistic movie-watching experience.
| I especially love the smart search feature, which helps me quickly find the films I
enjoy. | However, I hope the site will soon add multi-language subtitles to serve a broader audience.
|MotChill TVB is one of the best free online movie websites I’ve ever known. The diverse, high-quality movie library lets me enjoy my favorite films comfortably.
| The beautiful, intuitive interface makes it easy for me
to quickly find the films I want to watch. | The stable video quality, with
no lag, ensures smooth movie watching. | I particularly enjoy the movie history feature, which makes it easy to continue
watching unfinished films. | However, I hope the site will soon add community interaction features, like comments and movie ratings,
to build a vibrant movie-loving community.
|I’ve become a huge fan of MotChill TVB after experiencing many of its amazing features.
The diverse movie library, high video quality, and friendly
interface are major positives for MotChill TVB. | I especially love the
smart movie suggestion feature, which helps me discover many great films that match my taste.
| However, I hope the site will soon add a video quality selection option to save data.
| I’ll recommend MotChill TVB to my friends and family.
It’s a pity you don’t have a donate button! I’d without a doubt
donate to this superb blog! I suppose for
now i’ll settle for book-marking and adding your RSS feed to my Google account.
I look forward to fresh updates and will talk about this site with my Facebook
group. Talk soon!
При строительстве дома под ключ важно учитывать множество факторов, начиная от выбора материала для строительства. Один из самых популярных материалов для строительства домов — это кирпич. Кирпичный дом обладает высокой прочностью и долговечностью, что делает его отличным выбором для строительства в условиях северных климатов.
http://ceramique-et-couleurs.leforum.eu/redirect1/https://www.easy-online.at/2016/01/27/youtube-startet-shopping-ads/
Your work is truly outstanding and meaningful.
I know how difficult it is to put together a piece like this, and your hard
work is clearly visible. Keep up the great work, because your writing means a lot.
Thank you for sharing this valuable insight!
It’s amazing in favor of me to have a site, which is helpful in support of my knowledge.
thanks admin
my blog: provadent scam reddit
You said this very well!
Right here is the perfect webpage for anyone who really wants to understand this topic.
You understand a whole lot its almost hard to argue with you (not that I personally will need to…HaHa).
You definitely put a brand new spin on a subject that’s been written about for ages.
Great stuff, just great!
Also visit my blog post: post33621
If some one desires to be updated with newest technologies then he must be go to see this site and be up to
date every day.
Look into my blog post is billionaire brain wave legit
Благодаря профессионализму и ответственному подходу сотрудников, в автосервисе 5 бокс ваш автомобиль будет в надежных руках. Здесь ценят ваше время и деньги, поэтому стараются выполнить все работы быстро и качественно.
https://auto-5-box.ru
You reported that fantastically!
my homepage; paige (https://paigejimenez.com/)
Great post. I was checking continuously this blog and I’m impressed!
Extremely useful information specifically the last part 🙂 I
care for such information much. I was looking for this particular info for
a very long time. Thank you and good luck.
This is my first time visit at here and i am in fact happy to read everthing at single place.
My blog herpafend.com
This site was… how do I say it? Relevant!! Finally I have found something which helped me.
Thank you!
Yes! Finally someone writes about prodentim.
my page: does prodentim really work reddit
I really like your blog.. very nice colors & theme.
Did you create this website yourself or did you hire someone to do
it for you? Plz reply as I’m looking to create my own blog and would like to find
out where u got this from. kudos
If you would like to increase your knowledge only keep visiting this web site and be updated
with the latest news update posted here.
I really like what you guys are usually up too. Such clever work and coverage!
Keep up the terrific works guys I’ve incorporated you guys to our blogroll.
Sweet blog! I found it while browsing on Yahoo News.
Do you have any suggestions on how to get listed in Yahoo News?
I’ve been trying for a while but I never seem to get there!
Appreciate it
Excellent post. I was checking constantly this blog and I am impressed!
Extremely useful info particularly the last part 🙂 I care for such
information much. I was looking for this certain information for a very long time.
Thank you and good luck.
Hi! I know this is kinda off topic but I was wondering which
blog platform are you using for this site? I’m getting fed up of WordPress because I’ve had issues with hackers and I’m looking at
alternatives for another platform. I would
be awesome if you could point me in the direction of a
good platform.
Howdy! I could have sworn I’ve been to this site before but after checking through some
of the post I realized it’s new to me. Nonetheless, I’m definitely happy I found it and I’ll be bookmarking and checking back frequently!
Saved as a favorite, I really like your site!
What’s up to all, the contents existing at this web site are
really remarkable for people knowledge, well, keep up the nice work fellows.
Hello there, just became aware of your blog through Google, and found that it is truly informative.
I am gonna watch out for brussels. I’ll appreciate if you continue
this in future. Numerous people will be benefited from your writing.
Cheers!
This design is spectacular! You certainly know how to keep a reader entertained.
Between your wit and your videos, I was almost moved to start my own blog (well, almost…HaHa!) Excellent job.
I really loved what you had to say, and more than that, how
you presented it. Too cool!
Here is my blog — money wave scam
Hmm is anyone else experiencing problems with the pictures on this blog loading?
I’m trying to determine if its a problem on my end or if it’s the blog.
Any responses would be greatly appreciated.
My spouse and I stumbled over here by a different
web address and thought I might check things out.
I like what I see so now i’m following you.
Look forward to checking out your web page again.
Thanks for finally talking about > Управление сервоприводом SG90 с помощью PCA9685 из Python на Raspberry Pi/Orange Pi/Banana Pi < Loved it!
Hi all, here every one is sharing such experience, thus it’s fastidious to read this blog,
and I used to visit this weblog all the time.
Your style is so unique compared to other folks I have read stuff from.
Many thanks for posting when you’ve got the opportunity,
Guess I’ll just book mark this web site.
Hmm is anyone else encountering problems with the pictures on this blog loading?
I’m trying to determine if its a problem on my end
or if it’s the blog. Any suggestions would be greatly
appreciated.
… [Trackback]
[…] There you will find 22550 more Infos: micro-pi.ru/серво-sg90-pca9685-python-raspberry-pi/ […]
If you would like to improve your familiarity just keep visiting
this site and be updated with the most recent gossip posted
here.
всегда актуальная ссылка в телеграм глаз бога
Разглеждайки темата за гражданската отговорност, няма как да не споменем ползите и предложенията, които предлага Болерон при онлайн сключване на тази застраховка.
Болерон оптимизира процеса, като предлага ефективна и лесна платформа за онлайн сключване на полица, което пести време и ресурси на потребителите. Освен това, компанията предоставя атрактивни ценови условия и ясни условия, което дава възможност на клиентите да направят информиран избор. Дигиталното решение на Болерон е идеално за хората, които ценят бързината и удобството, когато става въпрос за гражданска отговорност.
онлайн гражданска
Great post. I used to be checking continuously this weblog
and I am inspired! Very useful information specially the remaining
section 🙂 I take care of such info a lot. I was seeking this certain information for a long time.
Thank you and good luck.
I do believe all the ideas you have presented for your post.
They are really convincing and will certainly work.
Nonetheless, the posts are too short for beginners. May you please lengthen them a bit from subsequent time?
Thanks for the post.
Have you ever thought about creating an e-book or guest
authoring on other websites? I have a blog based on the same information you discuss and would really like to have you share some stories/information. I know my audience would value your work.
If you are even remotely interested, feel free to shoot me
an e mail.
Comfax’s FAX App offers fast, secure mobile faxing for iPhone and Android users,
bringing convenience on the go.
FAX App provides ease and security for busy professionals needing mobile faxing.
FAX App’s HIPAA compliance guarantees data security,
fitting for healthcare, legal, and financial fields.
Use your camera to scan documents and send them via FAX App
with minimal steps.
FAX App’s cloud storage secures your faxes and keeps them
accessible.
Say goodbye to old fax machines and embrace FAX App’s efficiency.
Fax efficiently, cut paper use, and manage documents anytime from
your device.
Nicely put. With thanks.
https://godfather-789.com/ยเว็บตรงของคนไทย เจ้าพ่อมาเฟียเว็บใหญ่ไม่มีโกง
I pay a visit daily a few blogs and blogs to read articles,
however this blog presents feature based writing.
F*ckin’ tremendous issues here. I am very glad to see your post.
Thank you a lot and i’m looking ahead to touch you.
Will you kindly drop me a mail?
Comfax’s FAX App enables mobile faxing for iPhone and Android users with security and ease.
Designed with modern professionals in mind, FAX App combines ease of use with robust security features, making
it an ideal choice for anyone needing convenient faxing on the go.
HIPAA compliance in FAX App protects data privacy,
perfect for secure industries.
Use your camera to scan documents and send them via FAX App with minimal steps.
Keep your faxes safe with cloud storage, accessible anytime in FAX App.
No more office machines — enjoy FAX App’s mobile
fax efficiency.
Streamline faxing, reduce paper, and enjoy mobile management of your faxes.
Hi, i read your blog occasionally and i own a
similar one and i was just curious if you get a lot
of spam responses? If so how do you protect
against it, any plugin or anything you can advise?
I get so much lately it’s driving me insane so any help is very much appreciated.
SR22 Insurance in Wisconsin is an economic duty that
you’ll need to have to preserve to maintain your steering opportunities.
After a revocation, acquiring SR22 Insurance in Wisconsin is an important step in regaining the ability to drive.
Make certain that you understand the relations to SR22 Insurance in Wisconsin just before consenting to any plan. Your carrier is going to have the ability
to stroll you with the needs for SR22 Insurance in Wisconsin to make certain that you are
actually in full compliance.
Say goodbye to the uncertainty of traditional faxing. Monitor your faxes
in real time using the FAX App, starting from send to the final destination. Reliable tracking
helps you feel secure, allowing oversight on document progress.
Provided in every plan, this tracking is
perfect for pros needing secure, timely delivery. Whether for legal forms or confidential
health documents, you’ll stay in-the-know and connected seamlessly.
Wonderful site you have here but I was curious about if you knew of any
discussion boards that cover the same topics discussed in this article?
I’d really like to be a part of community where I can get opinions from other experienced individuals that share the same
interest. If you have any suggestions, please let me know.
Thanks!
Attractive part of content. I just stumbled upon your blog and
in accession capital to say that I get actually
enjoyed account your blog posts. Any way I’ll be
subscribing on your augment or even I fulfillment you access constantly
fast.
Hi there I am so delighted I found your web site,
I really found you by error, while I was browsing on Yahoo for something else, Nonetheless I am here now and would just like to
say thank you for a remarkable post and a all round thrilling blog (I also love
the theme/design), I don’t have time to browse it
all at the minute but I have saved it and also added in your RSS feeds,
so when I have time I will be back to read a lot more,
Please do keep up the great jo.
My web site: is purdentix worth it
Hello, Neat post. There’s a problem along with your web site in internet
explorer, could test this? IE still is the market chief and a good part of other people will
omit your wonderful writing because of this problem.
Here is my page does herpafend get rid of herpes
Это двухэтажный торговый особняк, во 62 залах коего расположилась выдержка российского художества xii — начина ХХ целая вечность.
my web blog https://cmvvs.ru/posetitelyam/bilety.html
If some one wants to be updated with latest technologies afterward he
must be go to see this web page and be up to date daily.
Review my web page — LipoZem Benefits
Fine way of explaining, and fastidious paragraph to obtain facts concerning my presentation focus, which i
am going to deliver in college.
My blog :: fitspresso best price
Думаю на этот вопрос ты сам найдешь ответ, https://tr.skypecam.ru/ посетив эротический видеочат.
Введите куда доставить,
http://tetra.net.ua/?module=forum&action=topic&id=1595 и заявку приедет из ближайшего к вам магазина или
ресторана.
Enthralling and revealing study of the subject. Your analysis was comprehensive and well-documented, presenting subscribers
with a in-depth grasp of the principal subjects at disposal.
I would delighted to engage extra on this issue.
If you allow, I would happily urge you to sign up for me on the SBOBET website, wherein we can extend our
deliberation in a elevated engaging domain.
My blog … Game provider
важно ознакомиться с нормативными условиями и условиями букмекера, чтобы полностью понять, 1хбет регистрация какие пейзажи ставок.
Здравейте на всички във форума! Искам да споделя страхотното си изживяване с Exotic Holiday – страхотна агенция, която силно препоръчвам на всеки, който мечтае за екзотична почивка или вълнуваща екскурзия до екзотични дестинации. Тази година използвах техните оферти и избрах почивка на райски остров – Малдивите, и това беше мечтано преживяване! Мястото беше като от картичка: екзотични плажове, кристално чиста вода и истински лукс.
За тези, които искат нещо по-приключенско, Екзотик Холидей предлагат богата селекция от културни обиколки, сафари приключения и екскурзии до Африка, Южна Америка и Азия. Аз съм запланувала няколко техни предложения за обиколка на древни цивилизации и еко туризъм в Амазонската джунгла, което е изключително интересно за следващото ми пътешествие.
Без съмнение те осигуряват качество на услугите и внимание към детайлите – от места за отсядане до местни гидове и културни преживявания. Ако търсите истинско екзотично пътуване или просто релакс на тропически остров, не се колебайте да се консултирате с тях!
екзотични курорти
Линейка iphone 16 представляет продуманные улучшения,
http://kryto.ukrbb.net/viewtopic.php?f=2&t=1321 которые повышают производительность и доработка камер.
Нейросети дают возможности для фотообработки, и все они безопасны и законны. Создайте сами, переходите по ссылке для деталей — https://fotonkodak.ru
Greetings! Very useful advice in this particular article!
It’s the little changes which will make the largest changes.
Thanks a lot for sharing!
I have to thank you for the efforts you’ve put in writing
this blog. I’m hoping to see the same high-grade blog posts
from you in the future as well. In fact, your creative writing abilities has inspired
me to get my very own site now 😉
I have read so many content on the topic of the blogger lovers however this paragraph is
truly a pleasant piece of writing, keep it up.
क्रिप्टो जुआघर, ऑनलाइन कैसीनो, मुफ्त स्पिन बोनस, नो डिपॉजिट
बोनस, क्रिप्टोकरेंसी
स्वीकृति, फौरन निकासी,
सहयोगी विपणन, खेल बेटिंग,
ऑनलाइन लॉटरी, और बिना केवाईसी कैसीनो जैसे सर्च टर्म्स
इंटरनेट जुआ खिलाड़ियों के बीच तेजी से लोकप्रिय हो रहे हैं। ये सर्च टर्म्स क्रिप्टोकरेंसी का प्रयोग करके सुरक्षित
और प्राइवेट तरीके से खेलना सुविधाजनक बनाते हैं। साथ
ही, मुफ्त स्पिन बोनस
और नो डिपॉजिट बोनस जैसे ऑफर्स
नए खिलाड़ियों को आकर्षित करने में सहायता करते हैं। खेल सट्टेबाजी और इंटरनेट लॉटरी जैसी सुविधाएं भी इस प्लेटफार्म को विस्तृत बनाती हैं।
Тщательно сверьте сведения из документации или авторизуйтесь через bankid.
Review my web site https://vse-zaymy-kredity.ru/ipoteka-onlajn
Заказать кейтеринг дёшево, недорого,
дорого, http://degnytaggart.blogspot.com/2010/08/blog-post_21.html слишком дорого
— как пожелаете!
Auto insurance coverage in Chicago is actually greater than merely a legal need; it is actually a vital financial investment in your personal safety.
See to it to pick auto insurance in Chicago that delivers the defense you need
to have when driving in the city.
Tips well used!!
I would like to thank you for the efforts you’ve put in penning
this site. I am hoping to view the same high-grade blog posts from you in the future as well.
In truth, your creative writing abilities has encouraged me to get my very own site now 😉
My homepage https://carinsuranceagents2.z4.web.core.windows.net
на странице, вы можете ознакомиться с детальную данные о каждой платформе,
бк мостбет официальный сайт её плюсах и адреса обзоры.
Наши копирайтеры напишут курсовую или дипломную работу, http://diplommakers.com/ а также повысят ее уникальность.
на многочисленных специализированных блогах можно обнаружить кучу полезной данных как правильно мостбет зеркало рабочее сегодня.
Твисты не предусматривают обмен / выплату настоящими средствами и используются только мостбет
для игры.
my blog post :: mostbet-wae3.top
Thanks designed for sharing such a fastidious thinking, paragraph is nice, thats why i have read it entirely
My web blog :: phenq on empty stomach
Вы поступаете правильно, http://diplomsabesta.com/ сомневаться тут неразумно ни одной минуты.
I every time emailed this website post page to all my associates, as
if like to read it then my contacts will too.
Feel free to surf to my web blog fitspresso independent reviews
Greetings from California! I’m bored at work so I decided to browse your
blog on my iphone during lunch break. I really
like the knowledge you provide here and can’t wait to take a look when I get home.
I’m surprised at how fast your blog loaded
on my mobile .. I’m not even using WIFI, just 3G ..
Anyways, excellent site!
Here is my web page: reviews for mitolyn
Public statements are essential for sharing updates about your business.
They enable media outlets to publish the important news.
A thoughtfully designed media announcement can grab the curiosity of news
writers, leading to favorable media coverage.
Additionally, news briefs provide an authentic source of information, which journalists trust.
By releasing regular news bulletins, organizations secure their visibility within the industry, earning trust while
affirming partnerships with the press.
My page; Chicago newswire services (https://gpsites.win/story.php?title=just-click-the-up-coming-internet-site)
Stablecoin news
The financial world is buzzing with excitement over emerging digital assets.
These innovative instruments are designed to bridge the gap between traditional and modern finance.
Investors and enthusiasts alike are keenly
following the latest trends. With regulatory discussions
heating up, each update seems to carry significant implications
for the future. It’s a rapidly evolving environment.
As new projects and platforms emerge, discussions around stability and trust become increasingly prevalent.
Many are exploring how these emerging assets can be used for everyday transactions.
The allure of enhanced security and minimal fluctuation in value draws
in both seasoned traders and newcomers. It creates a
unique blend of curiosity and caution among participants in the
market.
In this dynamic atmosphere, any announcement can shift perceptions overnight.
From partnerships and technology advancements to regulatory news, there’s much
to digest. Each piece of information paints a larger picture, helping stakeholders navigate this exciting yet uncertain landscape.
The interconnectedness of traditional finance and cutting-edge innovation is more
pronounced than ever.
Follow along as we delve into the pivotal updates and
their potential impact. You’ll discover insights that could shape your understanding of this evolving ecosystem.
With a closer look at what’s happening, one can better grasp the nuances of this financial frontier.
Exciting developments are just around the corner.
Latest Trends in Stablecoin Development
The landscape of digital currencies is constantly evolving,
and there’s a lot happening right now. Innovations are emerging at a rapid pace.
Many organizations are exploring new mechanisms to ensure
stability and user trust. It’s fascinating to witness how these developments reshape the economic framework around digital assets.
One major trend is the integration of enhanced regulatory measures.
Governments are beginning to take a closer look, influencing how these currencies are
structured and operated.
Another interesting aspect is the rise of hybrid models.
Some projects are blending traditional collateralization with decentralized elements.
This combination has the potential to offer greater flexibility and security.
Furthermore, technological advancements play a key role in this evolution. Many developers are leveraging blockchain technology to create more transparent systems,
which can increase user confidence.
The push for interoperability between different platforms
is also gaining traction. It makes transactions easier and broadens the usability of
these currencies in everyday life. On the horizon, we can see ventures aiming for greater scalability, which can ultimately facilitate mass adoption and practical
applications.
Additionally, community governance is becoming increasingly popular, enabling users to
have a say in the development and future direction of these projects.
This fosters a sense of ownership and involvement, which is crucial for long-term success.
There’s an undeniable shift taking place, and it feels like we’re just scratching
the surface of what’s to come in this dynamic field.
Regulatory Changes Impacting Stablecoins
Recent shifts in legislation are reshaping the landscape of digital currencies pegged to traditional assets.
These changes stem from a growing recognition of the need for oversight.
Authorities aim to enhance consumer protection and reduce potential risks associated with digital transactions.
As regulations evolve, stakeholders are adjusting strategies to adapt
to this new environment. It’s a dynamic situation with various implications for users and providers alike.
The landscape has become increasingly complex.
Countries are taking divergent paths in their
regulatory approaches. While some embrace innovative frameworks, others impose
stringent restrictions. These varying strategies create uncertainty for many
players. Understanding the implications of each regulation is crucial for long-term planning.
Moreover, the impact of these regulatory
efforts is felt across the globe. Innovations may flourish in regions with
supportive policies, while others may struggle under heavy
restrictions, illustrating how local laws can heavily influence market dynamics.
Furthermore, as jurisdictions compete to attract businesses,
the race for the best regulatory light is heating up, ultimately shaping the future of digital assets.
This regulatory scrutiny also sparks debates on transparency, compliance, and security.
The dialogue involves technologists, lawmakers,
and financial institutions. Everyone has a
stake in how things unfold in the upcoming months.
With evolving rules, collaboration will be key to forging a stable future
in the digital economy. Balancing innovation and protection remains a challenging yet essential task for the industry.
Market Performance of Leading Stablecoins
The current landscape for digital currencies tied to assets is quite dynamic.
Investors are constantly evaluating their stability and utility against market fluctuations.
It’s fascinating to witness how these digital assets maintain their value in a volatile environment.
Many individuals rely on these assets for preserving wealth, while others see them as tools for transactions.
In recent months, several prominent players have
experienced fluctuations in their market performance.
The overall demand seems to be shifting,
influenced by regulatory updates and technological advancements.
As platforms continue to innovate, the attractiveness of
these currencies endures. Some have managed to keep a steady peg, while others faced significant challenges.
Market trends reveal variations that often catch the attention of financial analysts.
Recent observations indicate that liquidity is also a pivotal
factor. In this unpredictable financial climate, adaptability to changing conditions becomes crucial for sustainability.
Notably, the mechanisms employed to ensure value stability can diverge significantly among
the top contenders.
With an ever-evolving regulatory landscape, the path ahead remains uncertain, and participants must stay informed.
Each asset’s resilience is tested against external pressures and internal governance.
There’s a palpable tension between innovation and compliance, which
could impact future growth trajectories. By tracking movements and market sentiment, investors can make informed decisions that align with their financial goals.
Feel free to visit my web-site; https://cryptolake.online/crypto8
Why visitors still make use of to read news papers when in this technological world everything is accessible on web?
Every weekend i used to pay a quick visit this web page, as i want enjoyment, since this this web page conations really
good funny stuff too.
Greetings! Very useful advice within this post!
It’s the little changes that make the most important changes.
Many thanks for sharing!
Florida Garage Door Repair & Installation Pros LLC
915 Middle River Dr Suite 306
Fort Lauderdale, FL 33304
+1 (305) 300-4211
contact@coopergarageservices.com
Very quickly this website will be famous among all
blogging and site-building users, due to it’s pleasant articles benicetomommy.com
It’s actually a great and useful piece of information. I’m glad that you simply shared
this helpful information with us. Please stay us up to date like this.
Thank you for sharing. benicetomommy.com
Your way of explaining everything in this post is really pleasant, every one be capable of effortlessly understand it,
Thanks a lot. benicetomommy.com
После того как вы определились с целями и бюджетом, пора перейти к проектированию. Вы можете воспользоваться услугами архитекторов или дизайнеров для создания индивидуального проекта или выбрать готовый проект из интернета. Важно учесть все важные аспекты: количество комнат, размеры, планировку. Перед началом строительства необходимо получить все необходимые разрешения. Это может занять некоторое время, но это обязательный шаг, который поможет избежать проблем в будущем. Для начала вам нужно обратиться в местные органы самоуправления и выяснить, какие документы необходимы для получения разрешения на строительство https://builder-spb.ru . Обычно требуется предоставить проектную документацию, а также технические условия для подключения к коммуникациям. Занимайтесь этим заранее, чтобы не затягивать процесс.
Hi, I think your website might be having browser compatibility issues.
When I look at your website in Safari, it looks
fine but when opening in Internet Explorer, it has some overlapping.
I just wanted to give you a quick heads up! Other
then that, great blog!
Also visit my site: dandelion greens tonic
Использование ветоши позволяет поддерживать чистоту и порядок в автосервисе, а также обеспечивает качественное обслуживание автомобилей. Благодаря своей эффективности и удобству в использовании, ветошь https://vetosh-optom.ru стала неотъемлемой частью рабочего процесса в автосервисах Санкт-Петербурга.
Howdy, i read your blog from time to time and i own a similar
one and i was just wondering if you get a lot of spam feedback?
If so how do you reduce it, any plugin or anything you can suggest?
I get so much lately it’s driving me crazy so any
help is very much appreciated.
Take a look at my web-site; nerve fresh premier vitality sale
взломанные игры с бесконечными ресурсами — это замечательный способ повысить качество
игры. Особенно если вы играете
на мобильном устройстве с Android, модификации открывают перед
вами широкие горизонты. Я лично использую модифицированные версии игр, чтобы
достигать большего.
Модификации игр дают невероятную возможность настроить игру,
что делает процесс гораздо
захватывающее. Играя с твиками, я могу создать новый игровой процесс, что добавляет новые приключения и делает игру более
достойной внимания.
Это действительно удивительно,
как такие моды могут улучшить переживания от игры, а при этом
с максимальной безопасностью использовать такие модифицированные приложения можно
без особых рисков, если быть внимательным и следить за обновлениями.
Это делает каждый игровой процесс
персонализированным, а
возможности практически неограниченные.
Рекомендую попробовать такие игры с модами для Android — это может открыть новые
горизонты
hello there and thank you for your info – I have definitely picked up
something new from right here. I did however expertise several technical
points using this web site, as I experienced to reload the
web site many times previous to I could get it to load properly.
I had been wondering if your web hosting is OK? Not that
I’m complaining, but sluggish loading instances times will sometimes affect your placement in google and
could damage your high-quality score if ads and
marketing with Adwords. Well I am adding this RSS to my e-mail and could look out for much more of your respective exciting content.
Ensure that you update this again very soon.
First, Google what is seo services [http://hp-ad.sub.jp/nayami/nayamibbs/index.html] continually functioning to improve its understanding of just how people utilize the net.
It’s vеry effortless tⲟ find ᧐ut any matter on net aѕ compared to textbooks, as Ӏ found this post ɑt thіs web site.
Μy web-site toto slot
Great article! Press statements are essential for influencing media messages
and communicating important news. They support establish connections between enttities and journalists.
Developing succcessful press releases involvess being focused, relevant witfh tthe
interests of specific press contacts. With the rise of digital media, press releases further act a vital role in digital public relations.
They nnot only reach conventional news outlets butt likewise
generate traffic and enhance a brand’s online footprint.
Adding multimedia elements, such as photos, can make press releases significantly appealing and viral.
Modifying to the dybamic media field while maintaining corte values can substantially increase a press release’s reach.
What’s your take on leveraging multimedia in media statements?
Here is my page Chicago — cwdade.com,
Heya i am for the first time here. I found this board and I find It really helpful & it
helped me out a lot. I hope to give something again and help others like you helped me.
ozon использует склады и сортировочные центры для держания https://www.ozon.ru/category/kostyum-konfetka/ и получения товаров.
РБК (24.11.18 2020).
Ваша компания ВГК ПОЛИМЕР отличается оперативным и успешным
выполнением поставленных задач.
Наши менеджеры готовы ответить на любые запросы и предоставить необходимую помощь.
Thank you a lot for sharing this with all folks you really recognize what you’re speaking approximately!
Bookmarked. Please also visit my website =). We can have
a hyperlink exchange arrangement between us
my web page; best fitspresso recipe
more a number of Bitcoin supporters claim that
gold and the banking sector — separately — consume twice more heat than bitcoin, which makes criticism of Bitcoin’s energy
https://kekius-maximus.vip/ pointless.
I know this web site presents quality dependent articles or reviews and other material,
is there any other web page which gives these things in quality?
Also visit my page :: reviews on slim boost tea
coba sendiri di tempat yang tenang untuk konsentrasi pada permainan dan lebih keren pahami link slot online mesin.
There’s certainly a lot to find out about this issue.
I like all of the points you have made.
Have a look at my blog post: is lipozem safe to take
kansas city hospitality broker
Ⲩour Expert Kansas Ciity Hospitality Broker
Trust Recoo Reall Estate Advisors fοr alⅼ
yoᥙr commercial real estate neеds in Overland Park.
Hаve ɑ look at my blog post — overland park commercial real estate broker
I think that is one of the such a lot vital information for me.
And i am satisfied studying your article. But wanna commentary on some normal issues, The site style is perfect, the articles is in point of fact excellent :
D. Just right activity, cheers
Feel free to visit my website: zencortex reviews and complaints
on it are all kinds lotteries, even powerball, megamillions, https://zyneventures.com/index.php/2025/01/09/little-known-ways-to-rid-yourself-of-betwinner-bonus/ and above 33 others.
Wow, incredible blog layout! How long have you been blogging
for? you make blogging look easy. The overall look of your web site is wonderful, let alone the content!
Also visit my page — the genius wave erfahrungen
You really make it seem so easy with your presentation but I
find this topic to be actually something that I think I
would never understand. It seems too complicated and
extremely broad for me. I’m looking forward for your next post, I’ll try to get the hang of it!
My blog post; gluco 6 blood sugar levels
Автосервис 5 Бокс https://auto-5-box.ru в Санкт-Петербурге – это место, где можно получить качественный и профессиональный ремонт авто. Столичные автолюбители ценят качественное обслуживание своих машин, именно поэтому сто в Санкт-Петербурге являются такими популярными.
вся выставленная на страницах сайта инфа, относящаяся к технических характеристик, наличия на складе, стоимости товаров, носит.
Also visit my web-site :: https://gsh72.ru/
Фитинг ПНД труба предназначен
для соединения труб из полиэтилена
низкого давления в водопроводных и канализационных системах.
Он обеспечивает герметичность и
прочность соединений.
reiseführer // lexikon tourismus : destinationen, gastronomie, hotellerie, reisemittler, reiseveranstalter, https://procliniku.ru/ verkehrsträger / hrsg. Автор взял за основу сочинение И.
Помимо производимого теперь мы предоставляем так же оборудование, снятое с заводов, https://szta66.ru/ но все еще.
If some one desires expert view regarding blogging and site-building
afterward i advise him/her to pay a quick visit this blog, Keep up the pleasant job.
This group what is the best online pokies australia (experienciacortazar.com.ar) an excellent
place to learn about why people enjoy utilizing
this tool.
Now I am going away to do my breakfast, once having my breakfast coming
over again to read other news.
It is the best time to make some plans for the future and it’s time to be
happy. I’ve read this post and if I could I desire to suggest you some interesting things or
advice. Maybe you could write next articles referring to this article.
I wish to read even more things about it!
The 400 mcg DFE dosage meets almost all of most women’s demands (unless you’re expectant or breastfeeding).
Also visit my webpage: http://47.96.131.247:8081/changmurph3719/8537672/-/issues/1
Если методички нет, https://https://kurttrans.ru// то оформить титульный лист есть возможность по гост.
Персонал сада. основным критерием вашего отбора должен https://berezka11.ru/ быть кадровый состав.
Yet the research on whether it works is restricted and clashing.
Also visit my webpage; https://Git.xjtustei.Nteren.net/rondamcphillam
พร้อมที่จะทดสอบโชคของคุณและสนุกหรือยัง?
เล่น Pokdeng ออนไลน์กับเพื่อนหรือคนแปลกหน้าจากทั่วโลก รับรางวัลที่สวยงามสำหรับชัยชนะของคุณ แข่งขันในทัวร์นาเมนต์ และเข้าร่วมชุมชนของผู้เล่น Pokdeng ที่มีประสบการณ์ ทั้งหมดนี้ทำได้ในคลิกเดียว
Here is my website: เกมคาสิโนออนไลน์ที่ดีที่สุด
Vital press releases are Influencing media Stories. They Aid Establish Connections
between Entities and Media Professionals. Writing Effective press
releases Necessitates being Focused, Matched with the Interests of Targeted Preess Contacts.
In Today’s Digital Age, press releases Also Function A Vital role in Web-Based PR.
They Reach Conventional news oulets Additionally Generate Interest and Strengrhen a Organization’s Digital Presence.
Incorporating Visuals, such as Photos, can Turn press releases Significantly Captivfating and Accessible.
Adjusting to the Developing media Sphere while Preserving core Values can Significantly Amplify
a press release’s Reach. What Are Your Thoughts on Leveraging multimedia in press
release chicago; freechat.mytakeonit.org, Releases?
https://promo1x199.xyz
The supplement is also vegan and devoid of usual irritants.
Feel free to surf to my website: https://Vcanhire.com/employer/15643/herpafend-try
Ремонт квартиры в Санкт-Петербурге https://mstroy-dom.ru может быть как капитальным, так и косметическим. Капитальный ремонт включает в себя полную замену отделки, перепланировку помещений, установку новых коммуникаций и т.д. Этот вид ремонта обычно требует значительных финансовых затрат и времени, но результат оправдывает все ожидания.
You actually said that fantastically!
Here is my page — Baccarat Site (https://thaisfriendly.com/read-blog/1006_exploring-online-betting-safety-with-inavegas-your-scam-verification-community.html)
Hello I am so thrilled I found your weblog, I really found you by error, while I was looking on Aol for something else, Regardless I am here now and
would just like to say cheers for a remarkable post and a all round interesting blog (I also love
the theme/design), I don’t have time to read through it all
at the moment but I have book-marked it and also included your RSS feeds,
so when I have time I will be back to read much more,
Please do keep up the superb job.
http://www.saerimtech.co.kr/bbs/board.php?bo_table=free&wr_id=1570415 is a relatively new dietary supplement that has gained significant attention in the market due to its perceived benefits in managing blood sugar levels.
Thanks to my father who shared with me regarding this blog, this web site is genuinely remarkable.
I savour, cause I discovered exactly what I used to be having
a look for. You have ended my four day lengthy hunt! God Bless you man. Have a
great day. Bye
Murnaghan, Ian, «https://treatmentstemcellinfo.com/.» «religious groups and their analysis of stem cells in moms and dads».
Explore stem cells. Marchione, Marilynn. «Doctors doubt about cure Perry stem cells.» associated
press/boston globe.
Eros AI is a specialized artificial intelligence chatbot designed for adult-oriented interactions, offering users a platform for engaging in NSFW (Not Safe for Work) conversations. Unlike traditional chatbots that focus on general-purpose communication, Eros AI is fine-tuned to engage in intimate and adult-themed dialogues, providing a more personalized and responsive experience. With advanced natural language processing and emotional recognition capabilities, Eros AI can adapt to users’ preferences, moods, and conversational styles, ensuring a dynamic and engaging experience.
Check out my web-site https://mega.nz/file/4FxlXDCY
This piece of writing will help the internet people for setting up new webpage or
even a blog from start to end.
Whoa! This blog looks just like my old one! It’s on a entirely different topic but it has pretty much the same page layout and design. Outstanding choice of colors!
my page; https://AutismTreatmentOptions.com/
мы готовы отвечать за свежесть любого рукоделие, что может {себе позволить} лишь те люди производители, которые дорожат наработанной.
Here is my web-site — https://mehanavdnh.ru/katalog/?product_cat=shuby-iz-strizhenogo-krolika-reks
Stop by my page; slot qris 5k
You expressed that really well!
my web page: https://db-tv.com/
накладной пенис купить могут хотящие разнообразить свою личную сферу.
Here is my blog post http://intim-mall.ru/smazki-lubrikanty/razogrevayuschie-smazki
Hi folks,
SEO and online marketing are essential in today’s highly competitive business landscape.
Living in Illinois, I’ve witnessed how geo-targeted strategies
significantly enhance online presence—especially for specialized
industries. This agency, a results-driven agency in Mundelein, distinguishes itself with personalized solutions.
Their specialization in on-page SEO and PPC campaigns enables businesses tto thrive in Chicago
Local Seo [https://Bolsadetrabajo.Tresesenta.Mx/] markets.
For example|Consider their successful campaigns: they improve
Google Business Profiles and employ cutting-edge
software to keep ahead of search engine updates. Paired with social
media integration, they develop holistic approaches.
Should you be aiming to enhance your online visibility,
this agency ensures concrete outcomes. The agency’s customized solutions fuel long-term growth, not just
short-term results.
https://mosprint77.ru/ становятся все более и более востребованными среди компаний, прикладывающих усилия придать своей.
안녕하세요, 델리샵 사용자분들!
오늘 특별히 최근 화제가 되고 있는
델리샵 초대코드 활용법에 대해
공유해볼까 해요.
아마도 신규로 가입하시는 분이라면,
이 코드 하나만 입력해도,
멤버십 혜택을
꼭 챙겨야 할 부분을
알려드리고 싶습니다.
특히,
델리샵은
생활용품부터
탈모약,
건강보조제,
뷰티 용품까지
아주 다양하게
취급하고 있어서,
한 번에 여러 가지를 구매하기 편리하고
코드를 통해 할인받으면
상당히 저렴해지더라고요.
게다가,
정기적으로 열리는 프로모션마다
더 높은 할인율이
함께 사용할 수도 있고,
자주 주문하실 예정이라면
가성비가 훨씬 좋아져요.
코드 입력 과정은
그리 어렵지 않아서,
회원가입 후 마이페이지에서
한 번만 등록하면,
곧바로 적립되거나
문제없이 처리되더라고요.
만약
할인이 적용되지 않는다면,
1:1 문의를 통해
간편하게 상담받을 수 있어서,
그 부분은 안심해도 됩니다.
친구들에게
https://deli-Code.com/코드를
공유하면,
서로 할인 혜택을 나눌 수도 있고
상호 간에 유용하더라고요.
또,
신규 가입자가 많을수록,
멤버십 포인트가
더욱 커질 수 있으니,
모두가 윈윈할 수 있는
좋은 방법이라고 생각해요.
DeliShop 측에서도
정기 쿠폰 발행을
항상 준비하고 있어서,
초대코드를 이미 등록하신 분들에게
알림이 더 빨리 도착하거나
소식을 들은 적 있어요.
그러니
한 번 쓰고 잊지 마시고,
계속 관련 프로모션을 챙기면
상당히 지속적으로
이득을 볼 수 있을 거예요.
마지막으로,
델리샵 초대코드는
복잡한 제한 없이,
손쉽게 적립금을 확보할 수 있는
현명한 쇼핑 팁이라고 생각합니다.
새로운 상품을 구매할 때
반드시 코드를 적용해보시고,
부담 없이 폭넓은 제품군을 즐겨보시길
권장합니다!
It is not my first time to pay a quick visit this website, i am visiting
this site dailly and take nice facts from here everyday.
Вы определенно сделали точка!
сертификат на массаж женщине москва
Brilliant insights! As The Loop’s top plumbing co, we’ve cracked Chicago’s brutal «emergency HVAC» SERPs through
773-area schema clusters + Ben’sBreadcrumb plugin. Burn cookie-cutter audits — Chi-Town demands two-fisted
review syndication from Wicker Park mom blogs. Proof?27%↑Skokie
leads. Hack alert: O’Hare proximity schema = rank
rocket.
— Marcus @ Chicago youtube seo (https://housethornwiki.Com/)
Network
familiarizing yourself with details such as durability,
minimum deposit and duration of the https://noskheman.com/discover-the-world-of-bc-game-online-casino/,
you are accurate get pleasure from game.
1winn 1winn .
мостбет скачать бесплатно shorts.borda.ru/?1-18-0-00000397-000-0-0 .
I need to to thank you for this fantastic read!!
I certainly loved every bit of it. I have got you bookmarked to check out new things you post…
1winn http://www.boardwars.forum24.ru/?1-10-0-00000406-000-0-0 .
motbet http://www.tagilshops.forum24.ru/?1-4-0-00000205-000-0-0 .
mostbest https://kharkovbynight.forum24.ru/?1-15-0-00003047-000-0-0-1742814422 .
1вин официальный мобильная 1вин официальный мобильная .
подобные эффекты ослабляются с увеличением частоты. digital communications: fundamentals and applications.
Also visit my page … https://www.net27.ru/
мостбет кыргызстан скачать https://maksipolinovtsu.forum24.ru/?1-1-0-00000194-000-0-0-1742815870 .
1 win.com http://www.mymoscow.forum24.ru/?1-6-0-00026928-000-0-0 .
1win.pro 1win.pro .
mostbet casino http://www.corgan.borda.ru/?1-0-0-00000265-000-0-0 .
mostbet промокод mostbet промокод .
1 вин про zdorovie.forum24.ru/?1-7-0-00000231-000-0-0-1742818050 .
1 win официальный сайт вход https://www.knowledge.forum24.ru/?1-0-0-00000101-000-0-0-1742817704 .
мостбет войти https://mostbet6004.ru/ .
Списание долгов по 127-ФЗ лучшее решение, когда у вас начались просрочки и уже нечем платить за кредиты https://bankrotstvo-v-moskve123.ru .
1win казино belbeer.borda.ru/?1-6-0-00001583-000-0-0 .
Устали от бесконечных убираний? Предоставьте заботы о уборке специалистам! Наша уборочная компания предоставляет услуги уборки для жилых помещений и офиса: постоянная, генеральная, ремонтная и и многое другое! Мы используем именно безвредные и результативные моющие средства, а также новейшее оборудование. Поручите уборку и удовлетворяйте свободным временем! Познакомьтесь больше о наших обслуживании на сайте: https://ubork-kompan24.ru . Чистота — основа здоровья!
There is definately a great deal to find out about this topic.
I really like all of the points you’ve made.
mostbet kg отзывы https://alfatraders.borda.ru/?1-0-0-00004917-000-0-0-1743053068/ .
Устали от бесконечных убираний? Передайте заботы о уборке профессионалам! Наша клининговая компания предоставляет обслуживание уборки для жилых помещений и рабочих пространств: постоянная, крупномасштабная, ремонтная и другие варианты! Мы используем лишь экологически чистые и рабочие моющие продукты, а также новейшее оборудование. Поручите уборку и получайте свободным временем! Узнайте больше о наших обслуживании на сайте: https://ubork-kompan24.ru . Чистота — залог здоровья!
Thank you Headstone for a Grave thee
auspicikous writeup. It in fact wwas a amkusement account
it. Look advanced to more added agreeable frm you!
By the way, how could we communicate?
Great web site you have got here.. It�s difficult to find excellent writing like yours these days. I honestly appreciate individuals like you! Take care!!
Feel free to surf to my blog post https://vavadacasino.Populiser.com/
скачать мостбет https://www.cah.forum24.ru/?1-3-0-00000096-000-0-0-1743053764 .
баланс ван вин fanfiction.borda.ru/?1-0-0-00029708-000-0-0-1743051664 .
Pin-Up платформасы – Сіздің сенімді ойын әлеміңіз Pin-Up платформасы – бұл тек ойын ғана емес, бұл сенімділік, жылдам төлемдер және керемет тәжірибе. Pin-Up платформасы Қазақстанда көптеген сүйікті ойыншылардың таңдауы.
Бұл платформа сізге рулетканы, blackjack, покер, бинго және көптеген басқа ойындарды ұсынады. Pin-Up платформасының интерфейсі өте қарапайым және интуитивті.
Жоғарғы мәзірде негізгі бөлімдер: ойындар, тіркелу, төлемдер, қолдау қызметі және акциялар айқын орналасқан.
http://oapr.edu.kz/?news=сәндік-қолданбалы-өнер-көркем-шығар&lang=en
Pin-Up платформасында әртүрлі ойындар қолжетімді: классикалық ойын автоматтарынан бастап рулетка, покер, бинго, blackjack сияқты көптеген ойын түрлері. Бұл платформаның басты артықшылығы – әлемдік провайдерлерден келген ойындар: Microgaming, NetEnt, Play’n GO сияқты компаниялар. Pin-Up платформасында төлем әдістерінің кең ауқымы қолжетімді, бұл ойыншыларға ұтыстарды жылдам және сенімді алуға мүмкіндік береді. Pin-Up платформасында төлем әдістері сенімді және жылдам, криптовалютамен де қолжетімді.
Pin-Up казино – Сіздің ең сенімді онлайн ойын әлеміңіз Pin-Up казино – сенімділік, ұтыс мүмкіндіктері және сапалы ойын аренасы. Қазақстанда Pin-Up платформасы үлкен танымалдылыққа ие.
Бұл платформа сізге жоғары сапалы ойын автоматтарын, рулетканы, покерді, бинго және басқа да классикалық және заманауи ойын түрлерін ұсынады. Pin-Up платформасының интерфейсі өте қарапайым және интуитивті.
Интуитивті мәзір сізге барлық қажетті бөлімдерге жылдам қол жеткізуге мүмкіндік береді.
http://oapr.edu.kz/?news=сборная-павлодарского-района-іі-мест
Pin-Up платформасында рулетка, покер, бинго және басқа да көптеген классикалық ойындар бар. Pin-Up казино жоғары сапты провайдерлерден ойындармен жабдықталған, мысалы, Microgaming, NetEnt. Pin-Up платформасында төлем әдістерінің кең ауқымы қолжетімді, бұл ойыншыларға ұтыстарды жылдам және сенімді алуға мүмкіндік береді. Visa, MasterCard, Skrill, Neteller сияқты танымал төлем жүйелері осы платформада қолжетімді.
Gates of Olympus, Pragmatic Play taraf?ndan sunulan heyecan dolu bir slot oyunudur. Bu oyun, Zeus’un krall?g?na ad?m atma f?rsat? sunar. Gates of Olympus demo oyna secenegi ile stratejinizi olusturmadan once deneyim kazanabilirsiniz.
Gates of Olympus oyna demo modunda, oyunun heyecan verici mekaniklerini ve dinamik yap?s?n? kesfedebilirsiniz.
Oyunun ana ozellikleri aras?nda cok say?da ucretsiz donus ve yuksek kazanc potansiyeli bulunur. Gates of Olympus ile buyuk kazanc f?rsatlar?n? degerlendirin! Eger Gates of Olympus hakk?nda daha fazla bilgi edinmek istiyorsan?z, oyunun tum ayr?nt?lar?n? demo modu sayesinde ogrenebilirsiniz.
Bu sayede, gercek parayla oynamadan once kendinizi gelistirebilirsiniz.
Unutmay?n, gates of olympus demo ile sadece eglence degil, ayn? zamanda stratejinizi gelistirme f?rsat?n? da yakalars?n?z.
Gates of Olympus ile tanr?lar?n dunyas?nda benzersiz oduller kazanabilirsiniz! Gates of Olympus’ta Zeus’un gucuyle buyuk oduller kazan?n!
Link: https://www.cedarhuts.com/uncategorized/gates-of-olympus-slot/
Bu oyun, Zeus’un krall?g?na adanm?s olup, oyunculara geleneksel slot mekaniklerini yeniden tan?mlayan bir oyun deneyimi sunar. Gates of Olympus oyna demo versiyonu ile oyunun temel mekaniklerini kesfedebilir ve Zeus’un gucunu hissedebilirsiniz. Gates of Olympus demo oyna secenegi ile oyunun tum inceliklerini kesfedebilirsiniz. Gates of Olympus demo turkce dil destegi ile de oyunun kurallar?n? ve ozelliklerini detayl?ca ogrenebilirsiniz.
Gates of Olympus, Pragmatic Play taraf?ndan sunulan heyecan dolu bir slot oyunudur. Zeus’un dunyas?na giris yaparak buyuk kazanclar elde edebilirsiniz. Gates of Olympus demo oyna secenegi ile stratejinizi olusturmadan once deneyim kazanabilirsiniz.
Gates of Olympus oyna demo modunda, oyunun heyecan verici mekaniklerini ve dinamik yap?s?n? kesfedebilirsiniz.
Oyunun ana ozellikleri aras?nda cesitli bonuslar ve yuksek kazanc f?rsatlar? yer al?r. Gates of Olympus ile buyuk kazanc f?rsatlar?n? degerlendirin! Eger Gates of Olympus hakk?nda daha fazla bilgi edinmek istiyorsan?z, gate of olympus demo secenegi ile oyunu ucretsiz olarak deneyimleyebilirsiniz.
Bu sayede, gercek parayla oynamadan once kendinizi gelistirebilirsiniz.
Unutmay?n, gates of olympus demo ile sadece eglence degil, ayn? zamanda stratejinizi gelistirme f?rsat?n? da yakalars?n?z.
Gates of Olympus ile Zeus’un krall?g?nda buyuk kazanclar elde etmeye haz?r olun! Zeus’un y?ld?r?mlar?yla kazanma sans?n? yakalay?n!
Link: https://catalogo.nexo.page/cevrimici-kurs-turkiye-de-kumar-casino-icin-seo-5/
Bu oyun, Zeus’un krall?g?na adanm?s olup, oyunculara essiz bir deneyim sunmaktad?r. Gates of Olympus oyna demo versiyonu ile tum detaylar?n? ogrenerek gercek oyuna haz?r hale gelebilirsiniz. Gates of Olympus demo oyna secenegi ile nas?l daha fazla kazanabileceginizi ogrenebilirsiniz. Gates of Olympus demo turkce dil destegi ile de oyunun tum detaylar?n? anlayarak Zeus’un kap?lar?n? aralayabilirsiniz.
Rejoignez notre plateforme sans attendre et beneficiez d’un Bonus de Bienvenue de 100% ! Avec une connexion rapide et un acces securise, vous etes a deux clics de l’excitation. N’oubliez pas d’utiliser votre code promo Casinozer pour optimiser vos gains . Consultez les retours des joueurs pour voir pourquoi tant de joueurs nous font confiance . Accedez a votre compte facilement avec Casinozer se connecter et plongez dans un monde de divertissement avec Casinozer gg . Partant pour l’aventure ? Lancez-vous avec votre casino prefere !
Essayez des aujourd’hui notre casino en ligne et beneficiez d’un bonus de bienvenue de 100% pour maximiser vos chances . Que vous soyez un joueur novice ou experimente , ce bonus est concu pour vous offrir une aventure immersive . Tirez parti de nos promotions speciales grace a un bon de reduction . Utilisez notre casinozer app pour jouer partout , tout le temps. Debutez votre aventure, connectez-vous simplement via l’espace utilisateur et accedez a un espace gaming captivant. Consultez egalement les critiques pour en savoir plus sur ce que les autres disent de nous .
Ouvrez un profil sur casinozer casino .
Saisissez votre offre speciale pour augmenter vos recompenses. Recuperez votre recompense et lancez votre premiere partie. Avec notre technologie avancee , vous etes assure de vivre une experience de casino en ligne unique . Decouvrez notre offre des maintenant et faites de chaque partie un moment unique .
Link: http://shenglulife.com/2024/12/07/casinozer-france-bonus-de-bienvenue-a-100-2/
Essayez une experience de jeu exceptionnelle avec notre casino en ligne . Que vous soyez un amateur de machines a sous , de poker ou de roulette , notre plateforme propose une large selection de jeux en ligne pour tous les gouts . Ne manquez pas l’opportunite de profiter d’avantages exclusifs avec un Code Promo Casinozer . Grace a notre systeme de recompenses, vous beneficiez de recompenses exclusives. Pour une immersion totale, installez l’ app dediee et jouez partout , tout le temps. Les retours d’experience prouvent la qualite de cette site de jeu . Accedez rapidement avec votre compte et explorez un univers de divertissement sans limites . Essayez notre site des aujourd’hui et vivez une aventure de jeu en ligne inoubliable .
The Convenience of Playing Aviator Online
One of the primary drivers behind the Aviator game’s success is its convenience. The online Aviator game is accessible on different systems, allowing players to play it on the go. Whether you’re using a desktop, a phone, or a larger screen, the Aviator official website delivers a smooth gameplay session. For fans of Aviator in India, the Aviator India game has become hugely popular due to its simplicity and potential for significant payouts. The simple design makes it convenient for beginners to pick up, while experienced players can perfect their approaches to maximize winnings.
Link: https://denpasartranslator.com/2024/10/14/aviator-onlaynkrash-igra-v-kazino/
Aviator Game Download and Bonuses
For those who enjoy direct gaming options, the Aviator game download possibility is an excellent option. Many gaming platforms feature exclusive bonuses for installing the game, offering gamers an added incentive to give it a shot. These rewards often include free bets, deposit matches, and other benefits that make the game even more exciting. The Aviator bonus game is another element that boosts player engagement. These bonus stages offer higher rewards or introduce new gameplay elements, giving players greater thrills and rewards. The combination of standard sessions and bonus rounds ensures that the Spribe Aviator game remains fresh.
Why the Online Aviator Game Stands Out
One of the main reasons behind the Aviator game’s popularity is its ease of access. The online Aviator game is available on various devices, allowing players to experience it anywhere and anytime. Whether you’re using a desktop, your mobile device, or a larger screen, the Aviator official website provides a uninterrupted betting adventure. For gaming enthusiasts in India, the Aviator India game has become widely loved due to its straightforward nature and chance to earn real money. The game’s intuitive interface makes it effortless for newcomers to pick up, while experienced players can refine their strategies to maximize winnings.
Link: https://www.ercbio.com/2024/08/01/aviator-igra-onlayn-v-kazino/
Getting the Aviator Game and Bonus Features
For those who prefer direct gaming options, the Aviator game download feature is highly appealing. Many gaming platforms feature exclusive bonuses for downloading the game, giving players an added incentive to start playing. These rewards often include bonus funds, welcome bonuses, and other rewards that enhance the gaming experience. The Aviator bonus game is another aspect that enhances the thrill. These bonus stages present increased multipliers or add extra twists, giving players even more opportunities to win. The combination of regular gameplay and bonus rounds ensures that the Spribe Aviator game remains fresh.
Enjoy the adrenaline of 4rabet online gaming with seamless access through the 4rabet platform. Whether you love 4 ra bet sports betting or casino games , our platform brings it all in one place . Install the 4rabet mobile app for quick and smooth entry to your top picks . Visit the 4rabet main site now and explore the world of 4ra bet excitement . Register now and elevate your gaming experience to the ultimate thrill!
Experience the adrenaline rush of 4rabet , your best platform for wagering on sports and thrilling bets in India. Whether you follow cricket or different events , the main 4rabet site offers a easy-to-use system to wager online and win big . With the 4rabet app login , you can enter your account at any moment, wherever you are, guaranteeing you stay in the game. The 4rabet casino is created to serve both beginners and high rollers, offering a wide range of betting options and slot machines .
Join the 4rabet online community right away and enjoy a reliable, easy-to-use gaming environment . Whether you like accessing your account on your PC or smartphone , the online casino fun is unmatched . Start your journey with 4rabet India and take your sports betting journey to the ultimate thrill!
Link: https://shanthadurga.com/2017/07/28/which-strategy/
4rabet India brings a seamless experience for casino enthusiasts and betting lovers in India. With the 4rabet login process being fast and encrypted, members can access their accounts effortlessly . The 4rabet app login ensures accessibility for mobile users , making it easy to bet anytime, anywhere . 4rabet India offers a extensive list of betting options , including football , and many other games , tailored specifically for Indian players . The betting hub is beginner-friendly, making it easy for both first-time players and high-stakes users to navigate . By checking out the official gaming page, users can take advantage of exclusive rewards . The 4rabet casino is trusted for its reliability and fast payouts , ensuring a trustworthy betting adventure . Whether you enjoy gambling on matches or playing slots , our platform has everything you need .
Do you have a spam issue on this website; I also am a blogger, and I
was wanting to know your situation; many of
us have created some nice practices and we are looking to exchange
strategies with other folks, why not shoot me an e-mail
if interested.
мостбет скачать андроид http://www.mostbet6006.ru .
Pragmatic Play’in sundugu Gates of Olympus, efsanevi bir temaya sahiptir. Zeus’un dunyas?na giris yaparak buyuk kazanclar elde edebilirsiniz. Gates of Olympus demo oyna secenegi ile oyunun nas?l isledigini ogrenebilir ve kendinizi gelistirebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun farkl? ozelliklerini ve kazanc sistemini deneyimleyebilirsiniz.
Oyunun ana ozellikleri aras?nda dinamik odeme sistemi ve buyuk oduller bulunur. Gates of Olympus ile buyuk kazanc f?rsatlar?n? degerlendirin! Eger Gates of Olympus hakk?nda daha fazla bilgi edinmek istiyorsan?z, oyunun tum ayr?nt?lar?n? demo modu sayesinde ogrenebilirsiniz.
Bu sayede, gates of olympus oyna karar?n? vermeden once tum detaylar? ogrenebilirsiniz.
Unutmay?n, oyunun demo versiyonu, strateji olusturmak icin harika bir aract?r.
Gates of Olympus ile efsanevi kazanc f?rsatlar?n? degerlendirin! Y?ld?r?mlar?n Efendisi Ile Kazan?n: Gates Of Olympus’ta Jackpot’a Ulas?n!
Link: https://sweetsandnibbles.com/gates-of-olympus-slot-online-antik-mitoloji-temali-slot/
Bu oyun, Zeus’un krall?g?na adanm?s olup, oyunculara essiz bir deneyim sunmaktad?r. Gates of Olympus oyna demo versiyonu ile kazanc stratejinizi belirleyebilirsiniz. Gates of Olympus demo oyna secenegi ile oyunun yuksek volatilitesini ve buyuk kazanc potansiyelini deneyimleyebilirsiniz. Gates of Olympus demo turkce dil destegi ile de oyunun tum detaylar?n? anlayarak Zeus’un kap?lar?n? aralayabilirsiniz.
Rejoignez notre casino en ligne sans attendre et tirez avantage d’un Bonus exclusif de 100% ! Avec casinozer connexion et un casinozer login securise , vous etes a quelques secondes de l’excitation. N’oubliez pas d’utiliser votre coupon exclusif pour booster votre experience. Consultez les temoignages pour decouvrir pourquoi nous sommes un choix populaire. Ouvrez une session facilement avec notre interface fluide et plongez dans un espace de jeu avec notre plateforme innovante . Pret a jouer ? C’est parti avec votre casino prefere !
Essayez des aujourd’hui notre casino en ligne et obtenez d’un bonus de bienvenue de 100% pour maximiser vos chances . Que vous soyez un debutant ou experimente , ce bonus est concu pour vous offrir une session de jeu optimisee. Tirez parti de nos offres exclusives grace a un code promo casinozer . Decouvrez notre app dediee pour jouer partout , tout le temps. Pour commencer , connectez-vous simplement via l’espace utilisateur et explorez un monde de jeu incroyable . Consultez egalement les casinozer avis pour voir ce que nos joueurs pensent de notre plateforme .
Creez votre compte sur notre plateforme.
Utilisez votre code promo casinozer pour obtenir encore plus d’avantages . Profitez de votre bonus exceptionnel et commencez a jouer immediatement . Avec notre technologie avancee , vous etes assure de passer un moment inoubliable. Inscrivez-vous des maintenant et transformez votre passion du jeu en une aventure inoubliable .
Link: https://revebazar.com/casinozer-casino-france-connexion-a-casino/
Essayez une experience de jeu exceptionnelle avec notre site de jeu. Que vous soyez un passionne de slots , de strategie ou de jeux de table , Casinozer Casino propose une multitude d’options de divertissement pour satisfaire tous les joueurs . Ne manquez pas l’opportunite de booster votre bankroll avec un bonus special. Grace a notre systeme de recompenses, vous beneficiez de recompenses exclusives. Pour une accessibilite sans faille , telechargez l’App Casinozer et accedez a vos jeux favoris, tout le temps. Les critiques des joueurs prouvent la qualite de cette plateforme . Accedez rapidement avec notre systeme securise et plongez dans un monde captivant. Decouvrez Casinozer des aujourd’hui et laissez-vous emporter par l’experience.
Inscrivez-vous sur notre plateforme des aujourd’hui et profitez d’un Bonus de premier depot a hauteur de 100% ! Avec une connexion rapide et un casinozer login securise , vous etes a quelques secondes de l’excitation. N’oubliez pas d’utiliser votre offre promotionnelle pour booster votre experience. Consultez les retours des joueurs pour decouvrir pourquoi tant de joueurs nous font confiance . Accedez a votre compte facilement avec notre interface fluide et plongez dans un univers ludique avec notre espace gaming. Pret a jouer ? Demarrez votre session avec votre casino prefere !
Inscrivez-vous sur des aujourd’hui Casinozer France et beneficiez d’un bonus de bienvenue de 100% pour augmenter vos gains. Que vous soyez un amateur ou confirme , ce bonus est concu pour vous offrir une experience inoubliable . Profitez de nos offres exclusives grace a un code de bonus. Decouvrez notre app dediee pour acceder a vos jeux favoris, tout le temps. Pour commencer , inscrivez-vous rapidement via casinozer se connecter et explorez un espace gaming captivant. Consultez egalement les critiques pour en savoir plus sur ce que les autres disent de nous .
Inscrivez-vous sur notre site de jeu .
Activez votre bonus exclusif pour maximiser vos gains . Recuperez votre recompense et commencez a jouer immediatement . Avec un site fluide et rapide, vous etes assure de passer un moment inoubliable. Inscrivez-vous des maintenant et faites de chaque partie un moment unique .
Link: https://livetechspot.com/casinozer-casino-france-bonus-de-bienvenue-a-100-5/
Profitez d’ une offre ludique incomparable avec notre site de jeu. Que vous soyez un passionne de bandits manchots, de poker ou de roulette , Casinozer Casino propose une large selection de jeux en ligne pour tous les gouts . Ne manquez pas l’opportunite de booster votre bankroll avec un Code Promo Casinozer . Grace a nos offres regulieres , vous beneficiez de recompenses exclusives. Pour une accessibilite sans faille , installez l’ app dediee et amusez-vous en deplacement , tout le temps. Les critiques des joueurs confirment la fiabilite de cette plateforme . Inscrivez-vous en un instant avec notre systeme securise et explorez un univers de divertissement sans limites . Decouvrez Casinozer des aujourd’hui et profitez du meilleur du gaming .
Aviator Game Online: Accessibility and Convenience
One of the main reasons behind the Aviator game’s popularity is its ease of access. The online Aviator game is offered on various devices, allowing players to play it anywhere and anytime. Whether you’re playing on a computer, your mobile device, or a tablet, the Aviator official website ensures a seamless gameplay session. For gaming enthusiasts in India, the Aviator India game has become widely loved due to its straightforward nature and potential for significant payouts. The user-friendly setup makes it easy for beginners to learn, while experienced players can enhance their gameplay to maximize winnings.
Link: https://vesti.kz/economy/kazahstane-ujestochili-pravila-vvoza-proizvodstva-produktov-39521/
Why Downloading the Aviator Game is Worth It
For those who prefer having a dedicated app, the Aviator game download feature is an excellent option. Many betting sites provide exclusive bonuses for getting the game, giving players an added incentive to give it a shot. These promotional offers often include free bets, welcome bonuses, and other rewards that make the game even more exciting. The Aviator bonus game is another element that boosts player engagement. These unique challenges offer higher rewards or add extra twists, giving players greater thrills and rewards. The combination of standard sessions and bonus rounds ensures that the Spribe Aviator game remains fresh.
The Convenience of Playing Aviator Online
One of the key factors behind the Aviator game’s popularity is its convenience. The online Aviator game is available on different systems, allowing players to enjoy it anywhere and anytime. Whether you’re gaming from a PC, a smartphone, or a portable device, the Aviator official website provides a smooth gaming experience. For players in India, the Aviator India game has become hugely popular due to its straightforward nature and potential for significant payouts. The game’s intuitive interface makes it convenient for newcomers to learn, while experienced players can enhance their gameplay to maximize winnings.
Link: https://intranews.kz/medianews/227?page=135
Aviator Game Download and Bonuses
For those who value having a dedicated app, the Aviator game download possibility is an excellent option. Many online casinos offer exclusive bonuses for getting the game, presenting users an added incentive to try it out. These bonuses often include free bets, deposit matches, and other benefits that enhance the gaming experience. The Aviator bonus game is another feature that adds to the excitement. These special rounds present increased multipliers or introduce extra twists, giving players even more opportunities to win. The combination of regular gameplay and bonus rounds ensures that the Spribe Aviator game remains fresh.
Пари матч – это популярная сервисов для онлайн-ставок. Сайт предлагает широкий выбор матчей, включая баскетбол и различные виды спорта.
Одной из ключевых особенностей, почему пользователи выбирают пари мач, является дружелюбный интерфейс, высокие коэффициенты и гарантированная выплата выигрышей.
Для начинающих пользователей доступны бонусы, которые позволяют начать игру без риска. Опытные беттеры также найдут интересные предложения, включая экспресс-ставки.
Зарегистрироваться на Parimatch можно всего за несколько минут, и сразу начать делать ставки. Присоединяйтесь и откройте для себя новый уровень эмоций с Parimatch!
When some one searches for his necessary thing, therefore he/she wishes to be available that in detail, so that thing is
maintained over here.
Feel the excitement of betting with 4rabet with seamless access through the 4rabet platform. Whether you enjoy 4 ra bet sports betting or virtual casino action, this site offers it all under one roof. Download the 4rabet application for quick and seamless gaming to your most loved options. Check out the 4rabet official website right away and experience the thrill of 4rabet . Join 4 bet and enhance your betting journey to the highest peak !
Experience the adrenaline rush of 4rabet , your best platform for wagering on sports and thrilling bets in India. Whether you follow basketball or different events , the main 4rabet site offers a easy-to-use platform to wager online and earn rewards . With the 4rabet application, you can log in to your account anytime , from anywhere , making sure you stay in the game. The 4ra bet platform is created to serve both first-time users and experts , offering a diverse selection of wagering opportunities and live dealer experiences.
Join the growing 4rabet family now and enjoy a safe , user-friendly betting system. Whether you prefer the 4rabet login on your PC or tablet, the online casino fun is top-tier. Begin playing with 4rabet India and upgrade your sports betting journey to the ultimate thrill!
Link: https://www.moksatechnologies.com/category/american-women-tallahassee-fl-site-free-2/
4RABET brings a seamless process for casino enthusiasts and betting lovers in India. With the easy account access process being quick and encrypted, users can access their betting dashboards without issues. The mobile login feature provides ease for mobile users , allowing them to enjoy their favorite games . 4rabet India provides a vast selection of wagering opportunities , including basketball, and many other games , tailored specifically for Indian players . The website is user-friendly , simplifying the experience for both beginners and high-stakes users to navigate . By visiting the 4rabet official website , members can take advantage of high-value rewards . The betting system is famous for its reliability and quick withdrawals , providing a secure betting adventure . Whether you prefer gambling on matches or live dealer experiences, our platform has something for everyone .
Feel the thrill of playing at 4rabet with seamless access through the 4rabet platform. Whether you’re a fan of sports wagering on 4rabet or online gambling , this site provides everything on one site . Get the 4rabet app login for quick and smooth entry to your most loved options. Explore the 4rabet official website now and explore the world of 4ra bet excitement . Sign up with 4rabet and take your gaming experience to the ultimate thrill!
Enjoy the excitement of online gaming with 4rabet, your best platform for sports betting and casino games in India. Whether you’re a fan of basketball or other popular sports , the official 4rabet platform features a easy-to-use interface to place your bets and win big . With the 4rabet app login , you can log in to your betting profile anytime , from anywhere , guaranteeing you stay in the game. The 4ra bet platform is made for both beginners and experts , featuring a diverse selection of betting options and live dealer experiences.
Register with the 4rabet gaming network now and experience a secure , user-friendly betting system. Whether you prefer accessing your account on your PC or mobile , the 4rbet experience is top-tier. Begin playing with 4 ra bet and take your sports betting journey to another level !
Link: https://brookejefferson.com/time-management-for-photographers/
The 4rabet platform provides a effortless experience for online gambling and gamblers in India. With the easy account access process being quick and protected , members can log into their profiles without issues. The smartphone access guarantees convenience for mobile users , allowing them to bet anytime, anywhere . The 4rabet website offers a extensive list of wagering opportunities , including football , and many other games , tailored specifically for Indian players . The betting hub is easy to navigate , simplifying the experience for both first-time players and experienced players to navigate . By visiting the main site , members can claim high-value promotions. The betting system is trusted for its strong reputation and fast payouts , guaranteeing a satisfying online gambling journey. Whether you prefer wagering on cricket or live dealer experiences, our platform has the perfect choice for you.
Mostbet offers an exceptional digital gambling experience with its official website and mobile application . Whether you choose to experience casino games on your desktop or tablet, the app installation ensures seamless access to exciting betting options and betting opportunities. Don’t miss out on the efficiency of the Android APK for Android device owners, providing hassle-free and instant access. Start your adventure today by logging in or creating a new account!
Step into the Mostbet gaming hub in Bangladesh! Experience a uninterrupted gaming experience with a vast selection of exciting games and bonuses . Mobile App for Mostbet : Access your preferred betting options anywhere, anytime by downloading the official casino application. Designed for mobile users, the app guarantees a uninterrupted and safe casino access. Sign in to Mostbet: Easily log in to your personal dashboard using your credentials . If you haven’t signed up yet, signing up is easy and straightforward .
Link: https://www.climavents.com/havalandirma-fani/mostbet-casino-official-online-website-register-and-login-in-bangladesh-2.html
Android Mostbet App : For Android users , the app package ensures a direct and hassle-free way to access. Ensure you get the most updated file for the best performance . Play alongside casino enthusiasts who rely on Mostbet for their gambling adventures . Whether you prefer slot machines , classic casino games, or real-time dealer games , everything is available on Mostbet . Visit the Mostbet gaming portal. Register or sign into Mostbet.
Check out the variety of games available .
Get the Mostbet mobile version for seamless gameplay.
Make the most of the excitement ! Kick off your gaming experience with Mostbet now and dive into high-quality online casino entertainment in Bangladesh.
Пари-матч – это ведущая площадок для онлайн-ставок. Платформа предлагает широкий выбор матчей, включая баскетбол и различные виды спорта.
Одной из ключевых особенностей, почему выбирают клиенты пари матч стара версія, является удобный интерфейс, высокие коэффициенты и надежность выплат.
Для новых игроков предлагаются бонусные программы, которые облегчают старт. Игроки с опытом также найдут интересные предложения, включая возможность следить за матчами в реальном времени.
Зарегистрироваться на Пари матч можно легко и просто, и сразу начать делать ставки. Присоединяйтесь и откройте для себя новый уровень эмоций с Parimatch!
Mostbet offers an unparalleled virtual casino adventure with its main platform and mobile application . Whether you prefer to experience casino games on your computer or tablet, the app installation ensures uninterrupted gameplay to thrilling betting options and betting opportunities. Don’t miss out on the efficiency of the Mostbet APK for Android users , providing fast and straightforward setup . Start your adventure today by Mostbet login or creating a new account!
Welcome the Mostbet gaming hub in Bangladesh! Immerse yourself in a seamless casino journey with a large variety of exciting entertainment choices and bonuses . Get the Mostbet Application: Play your favorite casino games on the go by installing the Mostbet app . Available for both Android and iOS devices , the app ensures a secure and secure betting session . Mostbet Login : Easily log in to your personal dashboard using your account information. If you are new to Mostbet , creating an account is simple and straightforward .
Link: http://defdiary.jayrene.com/2024/12/page/17/
Android Mostbet App : For those on Android , the app package provides a quick and smooth installation process . Make sure you get the most updated file for the optimal gaming performance. Play alongside casino enthusiasts who enjoy gaming with Mostbet for their gambling adventures . Whether you prefer reel-based games, classic casino games, or real-time dealer games , Mostbet has it all . Go to the Mostbet gaming portal. Register or sign into Mostbet.
Explore the numerous gaming choices.
Install the mobile application for mobile convenience .
Make the most of the fun ! Kick off your gaming experience with Mostbet now and enjoy world-class online casino entertainment in Bangladesh.
Pin-Up казино – Сіздің ең сенімді онлайн ойын әлеміңіз Pin-Up казино – сенімділік, ұтыс мүмкіндіктері және сапалы ойын аренасы. Pin-Up платформасы Қазақстанда көптеген сүйікті ойыншылардың таңдауы.
Бұл платформа сізге рулетканы, blackjack, покер, бинго және көптеген басқа ойындарды ұсынады. Pin-Up платформасының интерфейсі өте қарапайым және интуитивті.
Жоғарғы мәзірде негізгі бөлімдер: ойындар, тіркелу, төлемдер, қолдау қызметі және акциялар айқын орналасқан.
https://daz-kasachstan.net/news/?ELEMENT_ID=3737&PAGEN_2=15
Pin-Up казино әртүрлі ойындарды ұсынады – рулетка, покер, бинго және басқа классикалық ойындар. Pin-Up платформасында танымал провайдерлерден ойындар қолжетімді: Microgaming, NetEnt және Play’n GO. Төлемдер Pin-Up платформасында жылдам және әртүрлі әдістермен жүзеге асады. Visa, MasterCard, Skrill, Neteller сияқты танымал төлем жүйелері осы платформада қолжетімді.
Pin-Up казино – Сіздің ең сенімді онлайн ойын әлеміңіз Pin-Up казино – сенімділік, ұтыс мүмкіндіктері және сапалы ойын аренасы. Қазақстанда Pin-Up kz көптеген ойыншылардың жүрегін жаулап алды.
Бұл платформа сізге әртүрлі классикалық және заманауи ойын түрлерін ұсынады. Pin-Up платформасының дизайны қарапайым, бірақ өте ыңғайлы.
Негізгі мәзірден сіз ойындар, тіркелу, төлемдер, акциялар және қолдау бөлімдеріне тез қол жеткізе аласыз.
https://bk.kz/news/?ELEMENT_ID=1875&PAGEN_2=11
Pin-Up платформасында рулетка, покер, бинго және басқа да көптеген классикалық ойындар бар. Бұл платформаның басты артықшылығы – әлемдік провайдерлерден келген ойындар: Microgaming, NetEnt, Play’n GO сияқты компаниялар. Төлемдер Pin-Up платформасында жылдам және әртүрлі әдістермен жүзеге асады. Visa, MasterCard, Skrill, Neteller сияқты танымал төлем жүйелері осы платформада қолжетімді.
Gates of Olympus, Pragmatic Play taraf?ndan sunulan eglenceli bir slot oyunudur. Zeus’un dunyas?na giris yaparak buyuk kazanclar elde edebilirsiniz. Gates of Olympus demo oyna secenegi ile oyunun temposunu ve ozelliklerini onceden deneyimleyebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun heyecan verici mekaniklerini ve dinamik yap?s?n? kesfedebilirsiniz.
Oyunun ana ozellikleri aras?nda cok say?da ucretsiz donus ve yuksek kazanc potansiyeli bulunur. Gates of Olympus ile buyuk kazanc f?rsatlar?n? degerlendirin! Eger Gates of Olympus hakk?nda daha fazla bilgi edinmek istiyorsan?z, oyunun demo surumu ile pratik yapabilirsiniz.
Bu sayede, oyuna baslamadan once nas?l oynand?g?n? anlayabilirsiniz.
Unutmay?n, gates of olympus demo ile sadece eglence degil, ayn? zamanda stratejinizi gelistirme f?rsat?n? da yakalars?n?z.
Gates of Olympus ile efsanevi kazanc f?rsatlar?n? degerlendirin! Y?ld?r?mlar?n Efendisi Ile Kazan?n: Gates Of Olympus’ta Jackpot’a Ulas?n!
Link: https://cheftools.com.sa/2024/10/30/gates-of-olympus-slot-turkiyede-populer-oyunun-demo-surumunu-kesfedin/
Bu oyun, Zeus’un krall?g?na adanm?s olup, mitolojik bir atmosferde buyuk kazanc f?rsatlar? sunar. Gates of Olympus oyna demo versiyonu ile kazanc stratejinizi belirleyebilirsiniz. Gates of Olympus demo oyna secenegi ile nas?l daha fazla kazanabileceginizi ogrenebilirsiniz. Gates of Olympus demo turkce dil destegi ile de tum oyun icerigini rahatca kesfedebilirsiniz.
Decouvrez notre plateforme des aujourd’hui et beneficiez d’un Bonus de premier depot a hauteur de 100% ! Avec une connexion rapide et un casinozer login securise , vous etes a un instant de l’excitation. N’oubliez pas d’utiliser votre coupon exclusif pour maximiser vos avantages . Consultez les temoignages pour en savoir plus sur pourquoi nous sommes un choix populaire. Ouvrez une session facilement avec notre acces instantane et decouvrez un espace de jeu avec notre espace gaming. Partant pour l’aventure ? C’est parti avec votre casino prefere !
Essayez des aujourd’hui Casinozer France et profitez d’un bonus de premier depot double pour booster votre experience de jeu . Que vous soyez un amateur ou confirme , ce bonus est concu pour vous offrir une experience inoubliable . Tirez parti de nos deals du moment grace a un code promo casinozer . Decouvrez notre application mobile pour jouer partout , tout le temps. Pour commencer , inscrivez-vous rapidement via casinozer se connecter et decouvrez un espace gaming captivant. Consultez egalement les temoignages des joueurs pour voir ce que nos joueurs pensent de notre plateforme .
Ouvrez un profil sur notre site de jeu .
Saisissez votre offre speciale pour augmenter vos recompenses. Profitez de votre bonus exceptionnel et lancez votre premiere partie. Avec un site fluide et rapide, vous etes assure de vivre une experience de casino en ligne unique . Inscrivez-vous des maintenant et vivez le meilleur du gaming en ligne.
Link: https://fsb.kaaya.com.ph/casinozer-casino-france-bonus-de-bienvenue-a-100/
Profitez d’ une plateforme innovante avec Casinozer France . Que vous soyez un expert de slots , de poker ou de roulette , notre espace gaming propose une large selection de jeux en ligne pour satisfaire tous les joueurs . Ne manquez pas l’opportunite de maximiser vos gains avec un bonus special. Grace a notre systeme de recompenses, vous beneficiez de recompenses exclusives. Pour une accessibilite sans faille , installez l’ app dediee et accedez a vos jeux favoris, tout le temps. Les retours d’experience confirment la qualite de cette casino en ligne. Connectez-vous facilement avec Casinozer Login et decouvrez un univers de divertissement sans limites . Decouvrez notre casino des aujourd’hui et profitez du meilleur du gaming .
Inscrivez-vous sur notre plateforme des aujourd’hui et beneficiez d’un Bonus de Bienvenue de 100% ! Avec une connexion rapide et un casinozer login securise , vous etes a deux clics de l’excitation. N’oubliez pas d’utiliser votre coupon exclusif pour optimiser vos gains . Consultez les retours des joueurs pour en savoir plus sur pourquoi nos joueurs adorent Casinozer . Accedez a votre compte facilement avec Casinozer se connecter et decouvrez un espace de jeu avec notre espace gaming. Envie de tenter votre chance ? Demarrez votre session avec Casinozer Casino !
Rejoignez des aujourd’hui notre casino en ligne et beneficiez d’un offre exclusive pour nouveaux joueurs pour maximiser vos chances . Que vous soyez un joueur novice ou experimente , ce bonus est concu pour vous offrir une aventure immersive . Profitez de nos deals du moment grace a un bon de reduction . Decouvrez notre app dediee pour acceder a vos jeux favoris, tout le temps. Debutez votre aventure, ouvrez un compte via notre page de connexion et explorez un univers de divertissement sans limites . Consultez egalement les critiques pour en savoir plus sur ce que nos joueurs pensent de notre plateforme .
Creez votre compte sur casinozer casino .
Saisissez votre offre speciale pour maximiser vos gains . Activez votre offre de bienvenue et plongez dans l’action . Avec un site fluide et rapide, vous etes assure de passer un moment inoubliable. Decouvrez notre offre des maintenant et transformez votre passion du jeu en une aventure inoubliable .
Link: https://biblioteca.edurod.org/casinozer-casino-france-offre-genereux-bonus-de-bienvenue-de-100-2/
Profitez d’ une offre ludique incomparable avec notre casino en ligne . Que vous soyez un passionne de machines a sous , de jeux de cartes ou de jeux de table , notre espace gaming propose une large selection de jeux en ligne pour une experience unique. Ne manquez pas l’opportunite de profiter d’avantages exclusifs avec un Code Promo Casinozer . Grace a notre systeme de recompenses, vous beneficiez de recompenses exclusives. Pour une immersion totale, telechargez l’ application mobile et amusez-vous en deplacement , tout le temps. Les retours d’experience prouvent la fiabilite de cette site de jeu . Accedez rapidement avec Casinozer Login et explorez un espace ludique immersif . Decouvrez notre casino des aujourd’hui et profitez du meilleur du gaming .
I am truly grateful to the owner of this web page who has shared this wonderful
paragraph at at this place.
Why the Online Aviator Game Stands Out
One of the key factors behind the Aviator game’s popularity is its convenience. The online Aviator game is offered on multiple platforms, allowing players to experience it on the go. Whether you’re playing on a computer, a smartphone, or a tablet, the Aviator official website ensures a seamless gaming experience. For players in India, the Aviator India game has become widely loved due to its easy-to-understand mechanics and potential for significant payouts. The user-friendly setup makes it effortless for first-time players to learn, while experienced players can refine their strategies to improve results.
Link: https://ratel.kz/kaz/27467
Why Downloading the Aviator Game is Worth It
For those who enjoy having a dedicated app, the Aviator game download possibility is an excellent option. Many betting sites provide exclusive bonuses for downloading the game, offering gamers an added incentive to try it out. These rewards often include free bets, welcome bonuses, and other rewards that add value to your bets. The Aviator bonus game is another feature that enhances the thrill. These unique challenges provide higher rewards or include extra twists, giving players greater thrills and rewards. The combination of main game rounds and bonus rounds ensures that the Spribe Aviator game stays engaging.
Why the Online Aviator Game Stands Out
One of the main reasons behind the Aviator game’s success is its accessibility. The online Aviator game is available on different systems, allowing players to experience it from the comfort of their homes. Whether you’re using a desktop, a phone, or a portable device, the Aviator official website ensures a uninterrupted gaming experience. For gaming enthusiasts in India, the Aviator India game has become widely loved due to its simplicity and chance to earn real money. The user-friendly setup makes it effortless for newcomers to pick up, while experienced players can refine their strategies to improve results.
Link: https://www.ng.kz/modules/news/article.php?storyid=8599
Aviator Game Download and Bonuses
For those who value direct gaming options, the Aviator game download option is a convenient choice. Many betting sites provide exclusive bonuses for downloading the game, giving players an added incentive to try it out. These promotional offers often include free bets, deposit matches, and other rewards that enhance the gaming experience. The Aviator bonus game is another feature that enhances the thrill. These unique challenges provide higher rewards or add new gameplay elements, giving players greater thrills and rewards. The combination of regular gameplay and bonus rounds ensures that the Spribe Aviator game keeps players hooked.
Mega предлагает широкий выбор товаров:
от стильной одежды до уникальных коллекционных предметов.
Интуитивный интерфейс и частые акции превращают покупки на мега даркнет в удовольствие
для всех.
Experience the thrill of 4rabet online gaming with quick login through 4rabet login . Whether you’re a fan of sports wagering on 4rabet or virtual casino action, our platform brings it all on one site . Get the 4rabet app login for quick and easy access to your favorite games . Check out the 4rabet official website now and explore the fun of online gaming. Sign up with 4rabet and take your betting journey to the ultimate thrill!
Enjoy the adrenaline rush of the 4rabet platform , your best platform for wagering on sports and thrilling bets in India. Whether you’re a fan of football or other popular sports , the official 4rabet platform features a easy-to-use system to wager online and earn rewards . With the 4rabet application, you can enter your account anytime , wherever you are, ensuring you stay in the game. The 4ra bet platform is designed for both beginners and seasoned players , providing a wide range of betting options and slot machines .
Become a part of the 4rabet gaming network today and enjoy a reliable, easy-to-use gaming environment . Whether you like accessing your account on your PC or mobile , the 4rbet experience is top-tier. Kick off your betting experience with the 4rabet platform and upgrade your sports betting journey to new heights !
Link: https://www.mode-fair-produziert.de/author/admin/page/11/
4rabet India offers a easy journey for casino enthusiasts and casino fans in India. With the easy account access process being quick and secure , members can enter their accounts in seconds . The 4rabet app login guarantees convenience for mobile users , enabling them to bet anytime, anywhere . 4rabet India offers a extensive list of sports events, including football , and many other games , catering to Indian audiences. The betting hub is easy to navigate , making it easy for both beginners and high-stakes users to navigate . By checking out the 4rabet official website , members can take advantage of exclusive promotions. The betting system is known for its strong reputation and fast payouts , guaranteeing a secure betting adventure . Whether you enjoy wagering on cricket or live dealer experiences, 4rabet has everything you need .
Experience the adrenaline of betting with 4rabet with seamless access through your 4rabet account . Whether you enjoy sports wagering on 4rabet or casino games , our platform provides everything on one site . Install the 4rabet app login for fast and smooth entry to your favorite games . Explore the 4rabet official website today and explore the fun of online gaming. Sign up with 4rabet and elevate your gaming experience to the highest peak !
Experience the thrill of online gaming with 4rabet, your ultimate site for sports predictions and casino games in India. Whether you follow cricket or other popular sports , the official 4rabet platform provides a smooth interface to wager online and win big . With the 4rabet application, you can enter your betting profile 24/7 , wherever you are, guaranteeing you don’t lose a chance . The 4ra bet platform is made for both beginners and seasoned players , providing a diverse selection of wagering opportunities and live dealer experiences.
Join the 4rabet online community today and immerse yourself in a secure , easy-to-use interface . Whether you like the 4rabet login on your computer or smartphone , the 4rbet experience is top-tier. Begin playing with 4rabet India and take your casino fun to new heights !
Link: https://oncospecialist.com/discover-4rabet-official-online-website-for-sports-betting-and-casino-in-india/
The 4rabet platform brings a seamless experience for online gambling and betting lovers in India. With the easy account access process being quick and secure , players can access their profiles without issues. The smartphone access provides ease for those on the go , enabling them to play with ease. The 4rabet website offers a wide range of betting options , including cricket , and other major sports, tailored specifically for Indian players . The website is easy to navigate , making it easy for both new users and experienced players to navigate . By accessing the 4rabet official website , members can claim special bonuses . The 4ra bet platform is known for its trusted service and instant cashouts, providing a secure gaming experience . Whether you love gambling on matches or live dealer experiences, 4rbet has everything you need .
1win сайт вход [url=https://balashiha.myqip.ru/?1-12-0-00000437-000-0-0-1743258848]https://balashiha.myqip.ru/?1-12-0-00000437-000-0-0-1743258848[/url] .
This online casino offers an exceptional digital gambling experience with its official website and Mostbet app . Whether you choose to experience casino games on your desktop or smartphone , the Mostbet app download ensures seamless access to thrilling betting options and live sports wagering . Don’t miss out on the convenience of the Mostbet APK for Android users , enabling hassle-free and straightforward setup . Start your journey today by signing into your account or signing up !
Welcome the official Mostbet online casino platform in Bangladesh! Experience a smooth casino journey with a large variety of engaging options and bonuses . Mobile App for Mostbet : Play your top betting options on the go by installing the official casino application. Available for both Android and iOS devices , the app ensures a smooth and secure casino access. Mostbet Login : Effortlessly log in to your user profile using your login details . If you don’t have an account yet , signing up is quick and straightforward .
Link: https://vibt.lk/mostbet-casino-app-download-apk-for-android-and-install-guide-for-ios/
Mostbet APK : For Android users , the Mostbet APK file offers a easy and seamless download method . Make sure you install the newest release for the smoothest experience . Join the millions of players who trust Mostbet for their gambling adventures . Whether you prefer slots , classic casino games, or real-time dealer games , Mostbet caters to all players. Go to the Mostbet gaming portal. Create your account or sign into Mostbet.
Browse the exciting casino collection .
Download the Mostbet app for seamless gameplay.
Make the most of the excitement ! Start your journey with Mostbet now and enjoy world-class gambling thrills in Bangladesh.
Добро пожаловать в Starda Casino – мир невероятных выигрышей! Здесь вас ждут тысячи захватывающих игр от ведущих разработчиков. https://starda-rush.buzz/ и погрузитесь в атмосферу азарта!
Какие преимущества предлагает Starda Casino?
Популярные игры с бонусными функциями.
Эксклюзивные предложения на первый депозит.
Гарантированные выигрыши на удобные платежные системы.
Интуитивно понятный интерфейс для комфортной игры.
Круглосуточная служба поддержки отвечает в считанные минуты.
Создайте аккаунт и выиграйте по-крупному!
Our platform offers an exceptional digital gambling experience with its main platform and dedicated mobile app. Whether you prefer to experience casino games on your laptop or smartphone , the mobile gaming option ensures seamless access to thrilling betting options and betting opportunities. Don’t miss out on the ease of the Mostbet mobile file for Android users , enabling quick and instant access. Start your journey today by signing into your account or registering !
Welcome the Mostbet gaming hub in Bangladesh! Enjoy a uninterrupted betting adventure with a large variety of thrilling options and bonuses . Mobile App for Mostbet : Play your favorite gambling features anywhere, anytime by downloading the Mostbet app . Designed for mobile users, the app ensures a smooth and protected betting session . Secure Account Access : Effortlessly log in to your user profile using your account information. If you don’t have an account yet , creating an account is quick and effortless.
Link: https://kidzykidz.com/mostbet-baanlaadeshe-aphisiyaal-kyaasino-ebn-bukmekaar/
Mostbet APK : For those on Android , the Mostbet APK file offers a quick and smooth installation process . Always check you download the latest version for the best performance . Play alongside casino enthusiasts who rely on Mostbet for their online casino needs . Whether you enjoy slot machines , classic casino games, or live casino options , Mostbet has it all . Visit the Mostbet main site . Create your account or log in .
Explore the numerous gaming choices.
Download the Mostbet app for easy access .
Take advantage of the thrill! Begin your adventure with Mostbet today and experience top-notch online casino entertainment in Bangladesh.
казино онлайн kg http://mostbet6007.ru/ .
Pin-Up казино – Сіздің ең сенімді онлайн ойын әлеміңіз Pin-Up платформасы – бұл тек ойын ғана емес, бұл сенімділік, жылдам төлемдер және керемет тәжірибе. Қазақстанда Pin-Up kz көптеген ойыншылардың жүрегін жаулап алды.
Бұл платформа сізге жоғары сапалы ойын автоматтарын, рулетканы, покерді, бинго және басқа да классикалық және заманауи ойын түрлерін ұсынады. Pin-Up интерфейсі айқын және қолжетімді.
Жоғарғы мәзірде негізгі бөлімдер: ойындар, тіркелу, төлемдер, қолдау қызметі және акциялар айқын орналасқан.
https://bk.kz/news/?ELEMENT_ID=3205&PAGEN_2=5
Pin-Up платформасында әртүрлі ойындар қолжетімді: классикалық ойын автоматтарынан бастап рулетка, покер, бинго, blackjack сияқты көптеген ойын түрлері. Бұл платформаның басты артықшылығы – әлемдік провайдерлерден келген ойындар: Microgaming, NetEnt, Play’n GO сияқты компаниялар. Төлемдер Pin-Up платформасында жылдам және әртүрлі әдістермен жүзеге асады. Банктік карталар, Skrill, Neteller және криптовалюталар арқылы төлемдер қолжетімді.
Pin-Up казино – Жоғары ұтыс ықтималдығы және керемет тәжірибе Pin-Up платформасы – бұл тек ойын ғана емес, бұл сенімділік, жылдам төлемдер және керемет тәжірибе. Pin-Up платформасы Қазақстанда көптеген сүйікті ойыншылардың таңдауы.
Бұл платформа сізге жоғары сапалы ойын автоматтарын, рулетканы, покерді, бинго және басқа да классикалық және заманауи ойын түрлерін ұсынады. Pin-Up платформасының интерфейсі өте қарапайым және интуитивті.
Негізгі мәзірден сіз ойындар, тіркелу, төлемдер, акциялар және қолдау бөлімдеріне тез қол жеткізе аласыз.
https://www.atyrauspidcentre.kz/hattamalar-2023/protokol-30/
Pin-Up платформасында рулетка, покер, бинго және басқа да көптеген классикалық ойындар бар. Pin-Up казино жоғары сапты провайдерлерден ойындармен жабдықталған, мысалы, Microgaming, NetEnt. Pin-Up платформасында төлемдер әртүрлі әдістермен жүзеге асады: банктік карталар, электронды әмияндар, криптовалюталар. Pin-Up платформасында төлем әдістері сенімді және жылдам, криптовалютамен де қолжетімді.
Pragmatic Play’in sundugu Gates of Olympus, efsanevi bir temaya sahiptir. Bu oyun, Zeus’un krall?g?na ad?m atma f?rsat? sunar. Gates of Olympus demo oyna secenegi ile oyunun nas?l isledigini ogrenebilir ve kendinizi gelistirebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun yuksek volatilitesi ve carp?c? grafikleriyle tan?sabilirsiniz.
Oyunun ana ozellikleri aras?nda cok say?da ucretsiz donus ve yuksek kazanc potansiyeli bulunur. Gates of Olympus ile eglencenin ve kazanc?n kap?lar?n? aralay?n! Eger Gates of Olympus hakk?nda daha fazla bilgi edinmek istiyorsan?z, gate of olympus demo secenegi ile oyunu ucretsiz olarak deneyimleyebilirsiniz.
Bu sayede, oyuna baslamadan once nas?l oynand?g?n? anlayabilirsiniz.
Unutmay?n, oyunun demo versiyonu, strateji olusturmak icin harika bir aract?r.
Gates of Olympus ile Zeus’un krall?g?nda buyuk kazanclar elde etmeye haz?r olun! Zeus’un y?ld?r?mlar?yla kazanma sans?n? yakalay?n!
Link: https://www.lumanabv.nl/uncategorized/pragmatic-play-gates-of-olympus-oyununda-buyuk-kayiplar-yasiyorum/
Bu oyun, Zeus’un krall?g?na adanm?s olup, oyunculara geleneksel slot mekaniklerini yeniden tan?mlayan bir oyun deneyimi sunar. Gates of Olympus oyna demo versiyonu ile tum detaylar?n? ogrenerek gercek oyuna haz?r hale gelebilirsiniz. Gates of Olympus demo oyna secenegi ile oyunun tum inceliklerini kesfedebilirsiniz. Gates of Olympus demo turkce dil destegi ile de tum oyun icerigini rahatca kesfedebilirsiniz.
Gates of Olympus, Pragmatic Play taraf?ndan sunulan eglenceli bir slot oyunudur. Bu oyun, Zeus’un krall?g?na ad?m atma f?rsat? sunar. Gates of Olympus demo oyna secenegi ile oyunun temposunu ve ozelliklerini onceden deneyimleyebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun farkl? ozelliklerini ve kazanc sistemini deneyimleyebilirsiniz.
Oyunun ana ozellikleri aras?nda cok say?da ucretsiz donus ve yuksek kazanc potansiyeli bulunur. Gates of Olympus ile sans?n?z? deneyin ve buyuk odullere ulas?n! Eger Gates of Olympus hakk?nda daha fazla bilgi edinmek istiyorsan?z, oyunun tum ayr?nt?lar?n? demo modu sayesinde ogrenebilirsiniz.
Bu sayede, oyuna baslamadan once nas?l oynand?g?n? anlayabilirsiniz.
Unutmay?n, oyunun demo versiyonu, strateji olusturmak icin harika bir aract?r.
Gates of Olympus ile tanr?lar?n dunyas?nda benzersiz oduller kazanabilirsiniz! Gates of Olympus’ta Zeus’un gucuyle buyuk oduller kazan?n!
Link: https://blog.nirogindia.com/uncategorized-en/telegram-seo-anomaly-seo-backlinks-cross-links-10/
Bu oyun, Zeus’un krall?g?na adanm?s olup, oyunculara essiz bir deneyim sunmaktad?r. Gates of Olympus oyna demo versiyonu ile kazanc stratejinizi belirleyebilirsiniz. Gates of Olympus demo oyna secenegi ile oyunun tum inceliklerini kesfedebilirsiniz. Gates of Olympus demo turkce dil destegi ile de tum oyun icerigini rahatca kesfedebilirsiniz.
Rejoignez Casinozer France sans attendre et tirez avantage d’un Bonus de premier depot a hauteur de 100% ! Avec une connexion rapide et un acces securise, vous etes a un instant de l’excitation. N’oubliez pas d’utiliser votre coupon exclusif pour booster votre experience. Consultez les Casinozer avis pour en savoir plus sur pourquoi nos joueurs adorent Casinozer . Ouvrez une session facilement avec notre acces instantane et plongez dans un espace de jeu avec notre plateforme innovante . Partant pour l’aventure ? Demarrez votre session avec Casinozer Casino !
Essayez des aujourd’hui notre plateforme de jeu et beneficiez d’un bonus de premier depot double pour augmenter vos gains. Que vous soyez un joueur novice ou experimente , ce bonus est concu pour vous offrir une experience inoubliable . Ne manquez pas de nos offres exclusives grace a un bon de reduction . Decouvrez notre casinozer app pour jouer en deplacement , tout le temps. Debutez votre aventure, ouvrez un compte via notre page de connexion et accedez a un univers de divertissement sans limites . Consultez egalement les temoignages des joueurs pour decouvrir ce que notre communaute apprecie.
Ouvrez un profil sur notre plateforme.
Utilisez votre code promo casinozer pour obtenir encore plus d’avantages . Recuperez votre recompense et plongez dans l’action . Avec un site fluide et rapide, vous etes assure de passer un moment inoubliable. Rejoignez-nous des maintenant et faites de chaque partie un moment unique .
Link: https://telesenseglobal.com/casinozer-casino-france-connexion-a-casino/
Essayez une offre ludique incomparable avec notre site de jeu. Que vous soyez un expert de bandits manchots, de poker ou de hasard, Casinozer Casino propose une multitude d’options de divertissement pour satisfaire tous les joueurs . Ne manquez pas l’opportunite de booster votre bankroll avec un bonus special. Grace a Casinozer GG , vous beneficiez de bonus incroyables . Pour une accessibilite sans faille , essayez l’App Casinozer et accedez a vos jeux favoris, tout le temps. Les Avis Casinozer prouvent la excellence de cette plateforme . Connectez-vous facilement avec votre compte et decouvrez un espace ludique immersif . Decouvrez Casinozer des aujourd’hui et laissez-vous emporter par l’experience.
Decouvrez notre casino en ligne des maintenant et beneficiez d’un Bonus de Bienvenue de 100% ! Avec une connexion rapide et un casinozer login securise , vous etes a un instant de l’excitation. N’oubliez pas d’utiliser votre coupon exclusif pour maximiser vos avantages . Consultez les temoignages pour en savoir plus sur pourquoi tant de joueurs nous font confiance . Ouvrez une session facilement avec notre acces instantane et decouvrez un univers ludique avec notre espace gaming. Partant pour l’aventure ? Demarrez votre session avec le meilleur du gaming !
Inscrivez-vous sur des aujourd’hui notre casino en ligne et profitez d’un bonus de bienvenue de 100% pour booster votre experience de jeu . Que vous soyez un joueur novice ou passionne, ce bonus est concu pour vous offrir une session de jeu optimisee. Profitez de nos offres exclusives grace a un code promo casinozer . Telechargez notre casinozer app pour acceder a vos jeux favoris, tout le temps. Lancez-vous , ouvrez un compte via l’espace utilisateur et accedez a un univers de divertissement sans limites . Consultez egalement les temoignages des joueurs pour decouvrir ce que notre communaute apprecie.
Ouvrez un profil sur notre site de jeu .
Utilisez votre code promo casinozer pour augmenter vos recompenses. Profitez de votre bonus exceptionnel et commencez a jouer immediatement . Avec notre technologie avancee , vous etes assure de passer un moment inoubliable. Decouvrez notre offre des maintenant et vivez le meilleur du gaming en ligne.
Link: http://sedicmimarlik.com/decouvrez-casinozer-et-profitez-de-100-freespins-sans-conditions-de-mise-avec-linscription-2/
Profitez d’ une plateforme innovante avec Casinozer France . Que vous soyez un passionne de bandits manchots, de jeux de cartes ou de jeux de table , notre plateforme propose une bibliotheque de jeux variee pour une experience unique. Ne manquez pas l’opportunite de maximiser vos gains avec un code de reduction . Grace a nos offres regulieres , vous beneficiez de promotions regulieres . Pour une experience mobile optimale , essayez l’ application mobile et amusez-vous en deplacement , tout le temps. Les critiques des joueurs confirment la fiabilite de cette site de jeu . Inscrivez-vous en un instant avec votre compte et decouvrez un espace ludique immersif . Rejoignez notre casino des aujourd’hui et profitez du meilleur du gaming .
Выбирая место для покупок, миллионы пользователей останавливаются
на Мега. Нельзя не упомянуть, что
мега даркнет обеспечивает безопасность сделок, что делает покупки надежными.
Willkommen in einer Welt voller spannender Casino-Unterhaltung! Entdecke eine gro?e Auswahl an Online Slots, klassischen Tischspielen und Live-Casino-Erlebnissen Evobet
Our platform provides an top-notch online gaming experience with its official website and dedicated mobile app. Whether you enjoy to experience casino games on your computer or tablet, the app installation ensures easy entry to exciting casino games and live sports wagering . Don’t miss out on the ease of the Android APK for Android device owners, providing fast and straightforward setup . Start your adventure today by Mostbet login or creating a new account!
Join us on the Mostbet gambling site in Bangladesh! Enjoy a smooth betting adventure with a large variety of thrilling entertainment choices and features . Get the Mostbet Application: Access your favorite gambling features on the go by downloading the Mostbet app . Designed for mobile users, the app provides a uninterrupted and protected betting session . Secure Account Access : Quickly log in to your account using your credentials . If you don’t have an account yet , registering is simple and hassle-free .
Link: https://www.camedicibiobaby.it/2024/12/12/mostbet-baanlaadeshe-aphisiyaal-kyaasino-ebn-bukmekaar/
APK for Mostbet: For Android users , the APK installation ensures a direct and hassle-free installation process . Ensure you download the latest version for the optimal gaming performance. Play alongside casino enthusiasts who trust Mostbet for their gambling adventures . Whether you enjoy reel-based games, card games , or live casino options , Mostbet has it all . Go to the Mostbet main site . Sign up or log in .
Explore the variety of games available .
Get the Mostbet mobile version for easy access .
Make the most of the excitement ! Kick off your gaming experience with Mostbet now and experience top-notch online casino entertainment in Bangladesh.
Our platform offers an exceptional virtual casino adventure with its main platform and dedicated mobile app. Whether you prefer to play on your computer or smartphone , the mobile gaming option ensures uninterrupted gameplay to engaging casino games and live sports wagering . Don’t miss out on the convenience of the Mostbet mobile file for Android device owners, providing hassle-free and instant access. Start your gaming experience today by signing into your account or registering !
Welcome the official Mostbet online casino platform in Bangladesh! Experience a smooth gaming experience with a wide range of thrilling options and opportunities. Mobile App for Mostbet : Enjoy your favorite betting options while traveling by downloading the official casino application. Designed for mobile users, the app guarantees a secure and protected casino access. Secure Account Access : Quickly log in to your user profile using your login details . If you don’t have an account yet , creating an account is simple and hassle-free .
Link: https://www.livescorebook.com/2024/12/25/mostbet-casino-official-online-website-register-and-login-in-bangladesh/
Mostbet APK : For Android device owners, the Mostbet APK file offers a easy and seamless installation process . Make sure you install the newest release for the best performance . Join the millions of players who enjoy gaming with Mostbet for their online casino needs . Whether you prefer reel-based games, classic casino games, or real-time dealer games , everything is available on Mostbet . Visit the official Mostbet website . Create your account or log in .
Browse the exciting casino collection .
Install the mobile application for seamless gameplay.
Take advantage of the excitement ! Begin your adventure with Mostbet now and experience top-notch gambling thrills in Bangladesh.
Gates of Olympus, Pragmatic Play taraf?ndan sunulan heyecan dolu bir slot oyunudur. Bu oyun, Zeus’un krall?g?na ad?m atma f?rsat? sunar. Gates of Olympus demo oyna secenegi ile oyunun nas?l isledigini ogrenebilir ve kendinizi gelistirebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun heyecan verici mekaniklerini ve dinamik yap?s?n? kesfedebilirsiniz.
Oyunun ana ozellikleri aras?nda cesitli bonuslar ve yuksek kazanc f?rsatlar? yer al?r. Gates of Olympus ile eglencenin ve kazanc?n kap?lar?n? aralay?n! Eger Gates of Olympus hakk?nda daha fazla bilgi edinmek istiyorsan?z, oyunun tum ayr?nt?lar?n? demo modu sayesinde ogrenebilirsiniz.
Bu sayede, gates of olympus oyna karar?n? vermeden once tum detaylar? ogrenebilirsiniz.
Unutmay?n, deneme surumu sayesinde kazanma taktiklerinizi olusturabilirsiniz.
Gates of Olympus ile tanr?lar?n dunyas?nda benzersiz oduller kazanabilirsiniz! Gates of Olympus’ta Zeus’un gucuyle buyuk oduller kazan?n!
Link: https://www.vavatuyoga.com/2024/12/13/gates-of-olympus-slot-turk-oyuncular-icin-ozel-bonuslar-ve-promosyonlar/
Bu oyun, Zeus’un krall?g?na adanm?s olup, oyunculara essiz bir deneyim sunmaktad?r. Gates of Olympus oyna demo versiyonu ile tum detaylar?n? ogrenerek gercek oyuna haz?r hale gelebilirsiniz. Gates of Olympus demo oyna secenegi ile nas?l daha fazla kazanabileceginizi ogrenebilirsiniz. Gates of Olympus demo turkce dil destegi ile de oyunun tum detaylar?n? anlayarak Zeus’un kap?lar?n? aralayabilirsiniz.
мостбет скачать андроид http://www.mostbet6008.ru .
Ищете редкие вещи или товары,
недоступные в обычных магазинах На Mega собраны эксклюзивные товары со всего мира.
Имейте ввиду, mega официальный сайт – это
еще и безопасные транзакции,
так что вы можете быть уверены в каждой покупке.
мосбет мосбет .
Rejoignez Casinozer France des aujourd’hui et tirez avantage d’un Bonus de premier depot a hauteur de 100% ! Avec une connexion rapide et un casinozer login securise , vous etes a quelques secondes de l’excitation. N’oubliez pas d’utiliser votre coupon exclusif pour booster votre experience. Consultez les temoignages pour en savoir plus sur pourquoi nous sommes un choix populaire. Ouvrez une session facilement avec notre interface fluide et plongez dans un espace de jeu avec notre espace gaming. Partant pour l’aventure ? Lancez-vous avec votre casino prefere !
Inscrivez-vous sur des aujourd’hui notre casino en ligne et beneficiez d’un bonus de bienvenue de 100% pour booster votre experience de jeu . Que vous soyez un debutant ou confirme , ce bonus est concu pour vous offrir une aventure immersive . Ne manquez pas de nos promotions speciales grace a un bon de reduction . Utilisez notre application mobile pour acceder a vos jeux favoris, tout le temps. Lancez-vous , inscrivez-vous rapidement via l’espace utilisateur et accedez a un univers de divertissement sans limites . Consultez egalement les temoignages des joueurs pour voir ce que notre communaute apprecie.
Creez votre compte sur notre site de jeu .
Saisissez votre offre speciale pour maximiser vos gains . Profitez de votre bonus exceptionnel et lancez votre premiere partie. Avec notre technologie avancee , vous etes assure de profiter d’un divertissement exceptionnel . Rejoignez-nous des maintenant et faites de chaque partie un moment unique .
Link: https://unitedrecordingstudios.com/casinozer-casino-france-connexion-facile-et-securisee/
Essayez une experience de jeu exceptionnelle avec Casinozer France . Que vous soyez un amateur de bandits manchots, de strategie ou de hasard, notre plateforme propose une large selection de jeux en ligne pour satisfaire tous les joueurs . Ne manquez pas l’opportunite de booster votre bankroll avec un bonus special. Grace a notre systeme de recompenses, vous beneficiez de bonus incroyables . Pour une accessibilite sans faille , essayez l’App Casinozer et accedez a vos jeux favoris, tout le temps. Les critiques des joueurs temoignent la excellence de cette plateforme . Inscrivez-vous en un instant avec Casinozer Login et explorez un univers de divertissement sans limites . Essayez notre casino des aujourd’hui et profitez du meilleur du gaming .
Наслаждайтесь легкостью шопинга с Мега, где качество встречается с доступностью.
Независимо от того, ищете ли вы подарки, обновляете
свою технику или освежаете гардероб, megaweb15 предоставляет бесконечные варианты на расстоянии вытянутой руки.
Rejoignez Casinozer France sans attendre et tirez avantage d’un Bonus de premier depot a hauteur de 100% ! Avec casinozer connexion et un acces securise, vous etes a deux clics de l’excitation. N’oubliez pas d’utiliser votre offre promotionnelle pour maximiser vos avantages . Consultez les retours des joueurs pour voir pourquoi tant de joueurs nous font confiance . Connectez-vous facilement avec notre interface fluide et plongez dans un espace de jeu avec Casinozer gg . Envie de tenter votre chance ? C’est parti avec Casinozer Casino !
Essayez des aujourd’hui Casinozer France et beneficiez d’un bonus de premier depot double pour maximiser vos chances . Que vous soyez un amateur ou experimente , ce bonus est concu pour vous offrir une experience inoubliable . Tirez parti de nos promotions speciales grace a un code de bonus. Telechargez notre application mobile pour jouer partout , tout le temps. Pour commencer , ouvrez un compte via casinozer se connecter et decouvrez un univers de divertissement sans limites . Consultez egalement les temoignages des joueurs pour decouvrir ce que nos joueurs pensent de notre plateforme .
Ouvrez un profil sur notre site de jeu .
Utilisez votre code promo casinozer pour maximiser vos gains . Profitez de votre bonus exceptionnel et plongez dans l’action . Avec notre technologie avancee , vous etes assure de profiter d’un divertissement exceptionnel . Decouvrez notre offre des maintenant et transformez votre passion du jeu en une aventure inoubliable .
Link: https://yesilimarket.com/casinozer-casino-france-connexion-a-casino/
Profitez d’ une plateforme innovante avec notre site de jeu. Que vous soyez un passionne de slots , de poker ou de jeux de table , notre espace gaming propose une bibliotheque de jeux variee pour une experience unique. Ne manquez pas l’opportunite de profiter d’avantages exclusifs avec un Code Promo Casinozer . Grace a Casinozer GG , vous beneficiez de promotions regulieres . Pour une accessibilite sans faille , installez l’App Casinozer et accedez a vos jeux favoris, tout le temps. Les critiques des joueurs prouvent la fiabilite de cette plateforme . Connectez-vous facilement avec Casinozer Login et plongez dans un univers de divertissement sans limites . Essayez notre casino des aujourd’hui et laissez-vous emporter par l’experience.
Why the Online Aviator Game Stands Out
One of the main reasons behind the Aviator game’s popularity is its convenience. The online Aviator game is accessible on different systems, allowing players to experience it from the comfort of their homes. Whether you’re playing on a computer, your mobile device, or a larger screen, the Aviator official website delivers a smooth gameplay session. For players in India, the Aviator India game has become hugely popular due to its straightforward nature and chance to earn real money. The user-friendly setup makes it convenient for first-time players to start playing, while experienced players can enhance their gameplay to maximize winnings.
Link: https://onlineearnkaro.com/aviator-igra-v-kazino-onlayn/
Getting the Aviator Game and Bonus Features
For those who enjoy having a dedicated app, the Aviator game download feature is a convenient choice. Many gaming platforms feature exclusive bonuses for installing the game, giving players an added incentive to give it a shot. These bonuses often include bonus funds, welcome bonuses, and other rewards that make the game even more exciting. The Aviator bonus game is another aspect that enhances the thrill. These unique challenges offer increased multipliers or add new gameplay elements, giving players even more opportunities to win. The combination of standard sessions and bonus rounds ensures that the Spribe Aviator game stays engaging.
The Convenience of Playing Aviator Online
One of the primary drivers behind the Aviator game’s success is its convenience. The online Aviator game is accessible on various devices, allowing players to play it anywhere and anytime. Whether you’re using a desktop, a smartphone, or a larger screen, the Aviator official website delivers a uninterrupted betting adventure. For gaming enthusiasts in India, the Aviator India game has become widely loved due to its simplicity and potential for significant payouts. The user-friendly setup makes it effortless for newcomers to pick up, while experienced players can enhance their gameplay to increase success rates.
Link: http://news.resurs.kz/kaz/news/detail/6590
Why Downloading the Aviator Game is Worth It
For those who prefer having a dedicated app, the Aviator game download feature is an excellent option. Many online casinos provide exclusive bonuses for getting the game, presenting users an added incentive to try it out. These promotional offers often include bonus funds, deposit matches, and other perks that make the game even more exciting. The Aviator bonus game is another feature that boosts player engagement. These unique challenges provide increased multipliers or include unique challenges, giving players even more opportunities to win. The combination of main game rounds and bonus rounds ensures that the Spribe Aviator game remains fresh.
Here is my web site: https://cryptominerspro.com/
Мега предлагает широкий ассортимент для каждого
пользователя, включая электронику, одежду и
многое другое. Удобный поиск и акции делают шопинг на мега зеркало мега приятным,
а защита сделок гарантирует безопасность.
70918248
References:
low side effect steroids (https://megapersonals18.com/@jameynoguera4)
Reasons Why Online Casinos Are Booming
More and more players are choosing online gambling for its unmatched convenience and variety. One of the biggest advantages is accessibility. Unlike traditional brick-and-mortar casinos, online platforms operate 24/7, letting players enjoy their favorite games at any time.
Another major reason for their popularity is the sheer variety of games. Physical casinos may offer a few hundred games at best, but digital platforms feature thousands. Players can enjoy everything from nostalgic one-armed bandits to modern 3D slots packed with special features. Want to get the hottest casino updates and promotions? Click here to follow us! — http://www.lahoretbassociation.org/2024/12/26/1win-casino-y-casa-de-apuestas-una-experiencia-de-juego-inigualable/
How Online Casinos Keep Players Engaged
The abundance of promotions is one of the key benefits of playing at online casinos. Signing up usually comes with exciting perks like extra cash or free slot spins. Regular players can take advantage of loyalty programs, cashback deals, and exclusive VIP rewards. Not all casino games are about luck—some demand strategic thinking and expertise. For those who enjoy strategic play, poker offers opportunities to refine skills and increase winning chances. If you prefer a fast-paced, unpredictable experience, slots and roulette provide thrilling, luck-based gameplay.How to Gamble Responsibly Online
To ensure a positive experience, it’s vital to play responsibly and within limits. Setting personal limits, managing your budget wisely, and avoiding chasing losses are key to enjoying online casinos safely. Reputable platforms also promote responsible gaming by offering tools like deposit limits, self-exclusion, and links to gambling support organizations. Have you played at an online casino before? What was your experience like? Drop your opinions and stories in the discussion thread!
https://pq.hosting/help/kak-posmotret-polzovatelej-v-ubuntu
The Appeal of Online Gambling
There are many reasons why online casinos have gained massive traction. Perhaps the most appealing aspect is how easy it is to access games. While land-based casinos have restrictions, online platforms operate 24/7, letting players enjoy their favorite games at any time.
Another major reason for their popularity is the sheer variety of games. While land-based venues have space constraints, online casinos provide an endless assortment of games. Players can enjoy everything from nostalgic one-armed bandits to modern 3D slots packed with special features. Stay updated with the latest casino news, exclusive bonuses, and expert tips—follow us here! — https://canaltenis.com/1win-iniciar-sesion-registrarse/
Unlocking Casino Bonuses
Bonuses and special offers make online gambling even more enticing. Many platforms offer newcomers fantastic welcome packages, boosting their bankroll instantly. Loyal customers are rewarded with tiered programs, reloading bonuses, and special incentives. Not all casino games are about luck—some demand strategic thinking and expertise. Poker, for instance, is a game of skill where experienced players can outplay beginners by reading opponents and making calculated decisions. On the other hand, slot machines and roulette rely entirely on chance, making them ideal for casual players looking for fun and excitement.Finding a Secure and Fair Casino
To ensure a positive experience, it’s vital to play responsibly and within limits. Setting personal limits, managing your budget wisely, and avoiding chasing losses are key to enjoying online casinos safely. Trustworthy sites encourage responsible play through features like voluntary betting caps and time-out options. Have you played at an online casino before? What was your experience like? Share your thoughts and experiences in the comments below!
Why Online Casinos Are So Popular
More and more players are choosing online gambling for its unmatched convenience and variety. A key benefit is that online casinos are available anytime, anywhere. Unlike physical casinos that have operating hours, online platforms operate 24/7, letting players enjoy their favorite games at any time.
Another major reason for their popularity is the sheer variety of games. Physical casinos may offer a few hundred games at best, but digital platforms feature thousands. Whether you love old-school slots or cinematic video games, there’s something for everyone. For exclusive deals and insights into the best casinos, check out our social media page! — https://onlinegosht.com/2024/12/26/1win-todo-sobre-el-casino-en-linea-y-sus-oportunidades/
Unlocking Casino Bonuses
One of the biggest draws of online casinos is the generous promotions and bonuses. Signing up usually comes with exciting perks like extra cash or free slot spins. Loyal customers are rewarded with tiered programs, reloading bonuses, and special incentives. While many casino games are based purely on luck, some require skill and strategy. Poker, for instance, is a game of skill where experienced players can outplay beginners by reading opponents and making calculated decisions. On the other hand, slot machines and roulette rely entirely on chance, making them ideal for casual players looking for fun and excitement.Finding a Secure and Fair Casino
To ensure a positive experience, it’s vital to play responsibly and within limits. Smart bankroll management and self-control help players maintain a healthy approach to gambling. Trustworthy sites encourage responsible play through features like voluntary betting caps and time-out options. Do you enjoy online casinos? What are your favorite games and biggest wins? Drop your opinions and stories in the discussion thread!
Why Online Casinos Are So Popular
The surge in popularity of online casinos is driven by several factors. Perhaps the most appealing aspect is how easy it is to access games. While land-based casinos have restrictions, online platforms operate 24/7, letting players enjoy their favorite games at any time.
One of the strongest attractions is the enormous range of gaming options available. Traditional casinos are often limited by space, but online platforms can host thousands of different games. From classic fruit machines to cutting-edge video slots with immersive themes, the choices are practically limitless. Stay updated with the latest casino news, exclusive bonuses, and expert tips—follow us here! — https://linestoreperu.com/1win-apuestas-y-casino-online-en-un-solo-lugar/
Bonuses, Rewards, and Promotions
One of the biggest draws of online casinos is the generous promotions and bonuses. Signing up usually comes with exciting perks like extra cash or free slot spins. The more you play, the more rewards you unlock, from cashback to personalized bonuses. While many casino games are based purely on luck, some require skill and strategy. Poker, for instance, is a game of skill where experienced players can outplay beginners by reading opponents and making calculated decisions. For those who want quick and easy entertainment, luck-based games like slots deliver pure adrenaline.How to Gamble Responsibly Online
As exciting as online gambling can be, it’s essential to practice responsible gaming. Setting personal limits, managing your budget wisely, and avoiding chasing losses are key to enjoying online casinos safely. Trustworthy sites encourage responsible play through features like voluntary betting caps and time-out options. Are you an online casino enthusiast? What’s your go-to game? Drop your opinions and stories in the discussion thread!
Reasons Why Online Casinos Are Booming
There are many reasons why online casinos have gained massive traction. One of the biggest advantages is accessibility. While land-based casinos have restrictions, online platforms operate 24/7, letting players enjoy their favorite games at any time.
The vast selection of games also contributes to the widespread appeal. Traditional casinos are often limited by space, but online platforms can host thousands of different games. Whether you love old-school slots or cinematic video games, there’s something for everyone. For exclusive deals and insights into the best casinos, check out our social media page! — https://www.stamperiahurdega.ch/2016/08/22/standard-post-with-preview-image/
Unlocking Casino Bonuses
The abundance of promotions is one of the key benefits of playing at online casinos. Signing up usually comes with exciting perks like extra cash or free slot spins. Loyal customers are rewarded with tiered programs, reloading bonuses, and special incentives. While many casino games are based purely on luck, some require skill and strategy. For those who enjoy strategic play, poker offers opportunities to refine skills and increase winning chances. On the other hand, slot machines and roulette rely entirely on chance, making them ideal for casual players looking for fun and excitement.Responsible Gambling & Choosing a Safe Casino
While online casinos offer fun and potential winnings, responsible gambling is crucial. Setting personal limits, managing your budget wisely, and avoiding chasing losses are key to enjoying online casinos safely. Reputable platforms also promote responsible gaming by offering tools like deposit limits, self-exclusion, and links to gambling support organizations. Are you an online casino enthusiast? What’s your go-to game? Tell us about your biggest wins or best casino moments!
Reasons Why Online Casinos Are Booming
More and more players are choosing online gambling for its unmatched convenience and variety. A key benefit is that online casinos are available anytime, anywhere. Unlike physical casinos that have operating hours, online platforms operate 24/7, letting players enjoy their favorite games at any time.
The vast selection of games also contributes to the widespread appeal. While land-based venues have space constraints, online casinos provide an endless assortment of games. Whether you love old-school slots or cinematic video games, there’s something for everyone. For exclusive deals and insights into the best casinos, check out our social media page! — https://safecert.com.br/1win-casino-en-linea-descubre-todo-lo-que-necesitas-saber-para-disfrutar-al-maximo/
How Online Casinos Keep Players Engaged
Bonuses and special offers make online gambling even more enticing. New players are often welcomed with attractive sign-up bonuses, deposit matches, and free spins. Loyal customers are rewarded with tiered programs, reloading bonuses, and special incentives. Depending on your preferences, you can choose between pure chance games or those where skill makes a difference. In games like poker, knowledge and tactics can give players a significant edge over less experienced opponents. For those who want quick and easy entertainment, luck-based games like slots deliver pure adrenaline.Responsible Gambling & Choosing a Safe Casino
As exciting as online gambling can be, it’s essential to practice responsible gaming. Smart bankroll management and self-control help players maintain a healthy approach to gambling. Licensed casinos provide responsible gambling measures, such as cooling-off periods and withdrawal restrictions, to help players stay in control. Do you enjoy online casinos? What are your favorite games and biggest wins? Share your thoughts and experiences in the comments below!
The Appeal of Online Gambling
There are many reasons why online casinos have gained massive traction. One of the biggest advantages is accessibility. Unlike physical casinos that have operating hours, internet-based casinos never close, ensuring round-the-clock entertainment.
The vast selection of games also contributes to the widespread appeal. While land-based venues have space constraints, online casinos provide an endless assortment of games. From classic fruit machines to cutting-edge video slots with immersive themes, the choices are practically limitless. For exclusive deals and insights into the best casinos, check out our social media page! — https://w24.in/1win-todo-lo-que-debes-conocer-sobre-el-casino-en-linea-1win/
Bonuses, Rewards, and Promotions
Bonuses and special offers make online gambling even more enticing. New players are often welcomed with attractive sign-up bonuses, deposit matches, and free spins. The more you play, the more rewards you unlock, from cashback to personalized bonuses. While many casino games are based purely on luck, some require skill and strategy. For those who enjoy strategic play, poker offers opportunities to refine skills and increase winning chances. If you prefer a fast-paced, unpredictable experience, slots and roulette provide thrilling, luck-based gameplay.Finding a Secure and Fair Casino
To ensure a positive experience, it’s vital to play responsibly and within limits. Smart bankroll management and self-control help players maintain a healthy approach to gambling. Trustworthy sites encourage responsible play through features like voluntary betting caps and time-out options. Have you played at an online casino before? What was your experience like? Tell us about your biggest wins or best casino moments!
The Appeal of Online Gambling
The surge in popularity of online casinos is driven by several factors. A key benefit is that online casinos are available anytime, anywhere. While land-based casinos have restrictions, online platforms operate 24/7, letting players enjoy their favorite games at any time.
Another major reason for their popularity is the sheer variety of games. While land-based venues have space constraints, online casinos provide an endless assortment of games. Players can enjoy everything from nostalgic one-armed bandits to modern 3D slots packed with special features. Stay updated with the latest casino news, exclusive bonuses, and expert tips—follow us here! — https://www.spinnes-board.de/vb/downloads.php?do=file&id=540&page=996
How Online Casinos Keep Players Engaged
The abundance of promotions is one of the key benefits of playing at online casinos. Many platforms offer newcomers fantastic welcome packages, boosting their bankroll instantly. Loyal customers are rewarded with tiered programs, reloading bonuses, and special incentives. Not all casino games are about luck—some demand strategic thinking and expertise. Poker, for instance, is a game of skill where experienced players can outplay beginners by reading opponents and making calculated decisions. If you prefer a fast-paced, unpredictable experience, slots and roulette provide thrilling, luck-based gameplay.Responsible Gambling & Choosing a Safe Casino
To ensure a positive experience, it’s vital to play responsibly and within limits. Setting personal limits, managing your budget wisely, and avoiding chasing losses are key to enjoying online casinos safely. Licensed casinos provide responsible gambling measures, such as cooling-off periods and withdrawal restrictions, to help players stay in control. Are you an online casino enthusiast? What’s your go-to game? Share your thoughts and experiences in the comments below!
бк 1win https://www.1win6051.ru .
70918248
References:
Anabolic Steroids Weight Loss — http://gite.limi.ink/javierhelbig83 —
The Appeal of Online Gambling
More and more players are choosing online gambling for its unmatched convenience and variety. One of the biggest advantages is accessibility. Unlike physical casinos that have operating hours, internet-based casinos never close, ensuring round-the-clock entertainment.
The vast selection of games also contributes to the widespread appeal. While land-based venues have space constraints, online casinos provide an endless assortment of games. Whether you love old-school slots or cinematic video games, there’s something for everyone. For exclusive deals and insights into the best casinos, check out our social media page! — https://rentcostaricahomes.com/?p=6430
Bonuses, Rewards, and Promotions
Bonuses and special offers make online gambling even more enticing. New players are often welcomed with attractive sign-up bonuses, deposit matches, and free spins. Regular players can take advantage of loyalty programs, cashback deals, and exclusive VIP rewards. Not all casino games are about luck—some demand strategic thinking and expertise. In games like poker, knowledge and tactics can give players a significant edge over less experienced opponents. On the other hand, slot machines and roulette rely entirely on chance, making them ideal for casual players looking for fun and excitement.Responsible Gambling & Choosing a Safe Casino
To ensure a positive experience, it’s vital to play responsibly and within limits. Smart bankroll management and self-control help players maintain a healthy approach to gambling. Licensed casinos provide responsible gambling measures, such as cooling-off periods and withdrawal restrictions, to help players stay in control. Have you played at an online casino before? What was your experience like? Tell us about your biggest wins or best casino moments!
Howdy very cool site!! Man .. Beautiful .. Superb .. I’ll bookmark your website and take the feeds additionally�I’m satisfied to search out so many useful info here within the post, we’d like develop more strategies in this regard, thanks for sharing.
Also visit my web page https://telegra.ph/Mobile-online-casinos-10-23
Why Online Casinos Are So Popular
More and more players are choosing online gambling for its unmatched convenience and variety. Perhaps the most appealing aspect is how easy it is to access games. While land-based casinos have restrictions, online platforms operate 24/7, letting players enjoy their favorite games at any time.
The vast selection of games also contributes to the widespread appeal. Physical casinos may offer a few hundred games at best, but digital platforms feature thousands. Players can enjoy everything from nostalgic one-armed bandits to modern 3D slots packed with special features. For exclusive deals and insights into the best casinos, check out our social media page! — https://monparseguridadperu.com/descubre-la-emocion-total-con-los-mejores-bonos-y-juegos-en-el-casino-online-1win/
How Online Casinos Keep Players Engaged
Bonuses and special offers make online gambling even more enticing. Many platforms offer newcomers fantastic welcome packages, boosting their bankroll instantly. Regular players can take advantage of loyalty programs, cashback deals, and exclusive VIP rewards. Not all casino games are about luck—some demand strategic thinking and expertise. Poker, for instance, is a game of skill where experienced players can outplay beginners by reading opponents and making calculated decisions. If you prefer a fast-paced, unpredictable experience, slots and roulette provide thrilling, luck-based gameplay.Finding a Secure and Fair Casino
As exciting as online gambling can be, it’s essential to practice responsible gaming. Setting personal limits, managing your budget wisely, and avoiding chasing losses are key to enjoying online casinos safely. Reputable platforms also promote responsible gaming by offering tools like deposit limits, self-exclusion, and links to gambling support organizations. Do you enjoy online casinos? What are your favorite games and biggest wins? Share your thoughts and experiences in the comments below!
Why Online Casinos Are So Popular
There are many reasons why online casinos have gained massive traction. A key benefit is that online casinos are available anytime, anywhere. Unlike physical casinos that have operating hours, online platforms operate 24/7, letting players enjoy their favorite games at any time.
Another major reason for their popularity is the sheer variety of games. While land-based venues have space constraints, online casinos provide an endless assortment of games. Whether you love old-school slots or cinematic video games, there’s something for everyone. Stay updated with the latest casino news, exclusive bonuses, and expert tips—follow us here! — http://www.uptc.edu.co/sig/ambiental/proyecterra/redesun
Unlocking Casino Bonuses
Bonuses and special offers make online gambling even more enticing. Signing up usually comes with exciting perks like extra cash or free slot spins. Regular players can take advantage of loyalty programs, cashback deals, and exclusive VIP rewards. Depending on your preferences, you can choose between pure chance games or those where skill makes a difference. Poker, for instance, is a game of skill where experienced players can outplay beginners by reading opponents and making calculated decisions. On the other hand, slot machines and roulette rely entirely on chance, making them ideal for casual players looking for fun and excitement.Responsible Gambling & Choosing a Safe Casino
To ensure a positive experience, it’s vital to play responsibly and within limits. Smart bankroll management and self-control help players maintain a healthy approach to gambling. Licensed casinos provide responsible gambling measures, such as cooling-off periods and withdrawal restrictions, to help players stay in control. Have you played at an online casino before? What was your experience like? Drop your opinions and stories in the discussion thread!
Why Online Casinos Are So Popular
There are many reasons why online casinos have gained massive traction. A key benefit is that online casinos are available anytime, anywhere. Unlike physical casinos that have operating hours, internet-based casinos never close, ensuring round-the-clock entertainment.
The vast selection of games also contributes to the widespread appeal. Physical casinos may offer a few hundred games at best, but digital platforms feature thousands. Players can enjoy everything from nostalgic one-armed bandits to modern 3D slots packed with special features. Want to get the hottest casino updates and promotions? Click here to follow us! — https://devganeshexporters.com/1win-la-plataforma-de-apuestas-y-casino-lider-en-el-mercado/
Unlocking Casino Bonuses
Bonuses and special offers make online gambling even more enticing. New players are often welcomed with attractive sign-up bonuses, deposit matches, and free spins. Regular players can take advantage of loyalty programs, cashback deals, and exclusive VIP rewards. Not all casino games are about luck—some demand strategic thinking and expertise. In games like poker, knowledge and tactics can give players a significant edge over less experienced opponents. For those who want quick and easy entertainment, luck-based games like slots deliver pure adrenaline.How to Gamble Responsibly Online
As exciting as online gambling can be, it’s essential to practice responsible gaming. By setting strict financial limits and staying disciplined, players can prevent gambling from becoming a problem. Trustworthy sites encourage responsible play through features like voluntary betting caps and time-out options. Are you an online casino enthusiast? What’s your go-to game? Tell us about your biggest wins or best casino moments!
Why Online Casinos Are So Popular
There are many reasons why online casinos have gained massive traction. Perhaps the most appealing aspect is how easy it is to access games. Unlike traditional brick-and-mortar casinos, virtual casinos allow you to play whenever it suits you best.
The vast selection of games also contributes to the widespread appeal. Traditional casinos are often limited by space, but online platforms can host thousands of different games. Whether you love old-school slots or cinematic video games, there’s something for everyone. For exclusive deals and insights into the best casinos, check out our social media page! — https://nettvpros.com/car-rental/uncategorized/1win-todo-sobre-el-casino-en-linea-y-sus-oportunidades/
Bonuses, Rewards, and Promotions
Bonuses and special offers make online gambling even more enticing. Signing up usually comes with exciting perks like extra cash or free slot spins. The more you play, the more rewards you unlock, from cashback to personalized bonuses. Not all casino games are about luck—some demand strategic thinking and expertise. Poker, for instance, is a game of skill where experienced players can outplay beginners by reading opponents and making calculated decisions. If you prefer a fast-paced, unpredictable experience, slots and roulette provide thrilling, luck-based gameplay.How to Gamble Responsibly Online
While online casinos offer fun and potential winnings, responsible gambling is crucial. Smart bankroll management and self-control help players maintain a healthy approach to gambling. Reputable platforms also promote responsible gaming by offering tools like deposit limits, self-exclusion, and links to gambling support organizations. Do you enjoy online casinos? What are your favorite games and biggest wins? Drop your opinions and stories in the discussion thread!
Reasons Why Online Casinos Are Booming
The surge in popularity of online casinos is driven by several factors. Perhaps the most appealing aspect is how easy it is to access games. Unlike physical casinos that have operating hours, internet-based casinos never close, ensuring round-the-clock entertainment.
Another major reason for their popularity is the sheer variety of games. Traditional casinos are often limited by space, but online platforms can host thousands of different games. Whether you love old-school slots or cinematic video games, there’s something for everyone. For exclusive deals and insights into the best casinos, check out our social media page! — https://goodmangold.com/1win-apuestas-y-casino-online-en-un-solo-lugar-seguro-y-confiable/
Bonuses, Rewards, and Promotions
Bonuses and special offers make online gambling even more enticing. New players are often welcomed with attractive sign-up bonuses, deposit matches, and free spins. Loyal customers are rewarded with tiered programs, reloading bonuses, and special incentives. Depending on your preferences, you can choose between pure chance games or those where skill makes a difference. For those who enjoy strategic play, poker offers opportunities to refine skills and increase winning chances. For those who want quick and easy entertainment, luck-based games like slots deliver pure adrenaline.Finding a Secure and Fair Casino
As exciting as online gambling can be, it’s essential to practice responsible gaming. By setting strict financial limits and staying disciplined, players can prevent gambling from becoming a problem. Licensed casinos provide responsible gambling measures, such as cooling-off periods and withdrawal restrictions, to help players stay in control. Are you an online casino enthusiast? What’s your go-to game? Share your thoughts and experiences in the comments below!
The Appeal of Online Gambling
More and more players are choosing online gambling for its unmatched convenience and variety. A key benefit is that online casinos are available anytime, anywhere. While land-based casinos have restrictions, internet-based casinos never close, ensuring round-the-clock entertainment.
The vast selection of games also contributes to the widespread appeal. While land-based venues have space constraints, online casinos provide an endless assortment of games. Whether you love old-school slots or cinematic video games, there’s something for everyone. For exclusive deals and insights into the best casinos, check out our social media page! — http://lopanasbygg.se/2024/12/10/1win-casino-en-linea-todo-lo-que-necesitas-saber-para-disfrutar-al-maximo-2/
Bonuses, Rewards, and Promotions
One of the biggest draws of online casinos is the generous promotions and bonuses. Many platforms offer newcomers fantastic welcome packages, boosting their bankroll instantly. Loyal customers are rewarded with tiered programs, reloading bonuses, and special incentives. While many casino games are based purely on luck, some require skill and strategy. For those who enjoy strategic play, poker offers opportunities to refine skills and increase winning chances. For those who want quick and easy entertainment, luck-based games like slots deliver pure adrenaline.Finding a Secure and Fair Casino
To ensure a positive experience, it’s vital to play responsibly and within limits. By setting strict financial limits and staying disciplined, players can prevent gambling from becoming a problem. Reputable platforms also promote responsible gaming by offering tools like deposit limits, self-exclusion, and links to gambling support organizations. Have you played at an online casino before? What was your experience like? Tell us about your biggest wins or best casino moments!
In my opinion you are not right. I can prove it. Write to me in PM, we will communicate.
The Appeal of Online Gambling
The surge in popularity of online casinos is driven by several factors. A key benefit is that online casinos are available anytime, anywhere. Unlike traditional brick-and-mortar casinos, virtual casinos allow you to play whenever it suits you best.
One of the strongest attractions is the enormous range of gaming options available. While land-based venues have space constraints, online casinos provide an endless assortment of games. Players can enjoy everything from nostalgic one-armed bandits to modern 3D slots packed with special features. Want to get the hottest casino updates and promotions? Click here to follow us! — https://phoenixfinancing.co.uk/2025/page/22/
Bonuses, Rewards, and Promotions
Bonuses and special offers make online gambling even more enticing. New players are often welcomed with attractive sign-up bonuses, deposit matches, and free spins. The more you play, the more rewards you unlock, from cashback to personalized bonuses. Not all casino games are about luck—some demand strategic thinking and expertise. For those who enjoy strategic play, poker offers opportunities to refine skills and increase winning chances. For those who want quick and easy entertainment, luck-based games like slots deliver pure adrenaline.Finding a Secure and Fair Casino
As exciting as online gambling can be, it’s essential to practice responsible gaming. Smart bankroll management and self-control help players maintain a healthy approach to gambling. Licensed casinos provide responsible gambling measures, such as cooling-off periods and withdrawal restrictions, to help players stay in control. Are you an online casino enthusiast? What’s your go-to game? Drop your opinions and stories in the discussion thread!
The Appeal of Online Gambling
There are many reasons why online casinos have gained massive traction. Perhaps the most appealing aspect is how easy it is to access games. Unlike traditional brick-and-mortar casinos, online platforms operate 24/7, letting players enjoy their favorite games at any time.
One of the strongest attractions is the enormous range of gaming options available. Physical casinos may offer a few hundred games at best, but digital platforms feature thousands. Whether you love old-school slots or cinematic video games, there’s something for everyone. Stay updated with the latest casino news, exclusive bonuses, and expert tips—follow us here! — https://ffnailsacademy.gr/archives/author/antonis_b72220r3/page/207
Bonuses, Rewards, and Promotions
One of the biggest draws of online casinos is the generous promotions and bonuses. New players are often welcomed with attractive sign-up bonuses, deposit matches, and free spins. Loyal customers are rewarded with tiered programs, reloading bonuses, and special incentives. Not all casino games are about luck—some demand strategic thinking and expertise. Poker, for instance, is a game of skill where experienced players can outplay beginners by reading opponents and making calculated decisions. If you prefer a fast-paced, unpredictable experience, slots and roulette provide thrilling, luck-based gameplay.How to Gamble Responsibly Online
As exciting as online gambling can be, it’s essential to practice responsible gaming. Smart bankroll management and self-control help players maintain a healthy approach to gambling. Reputable platforms also promote responsible gaming by offering tools like deposit limits, self-exclusion, and links to gambling support organizations. Are you an online casino enthusiast? What’s your go-to game? Drop your opinions and stories in the discussion thread!
Reasons Why Online Casinos Are Booming
More and more players are choosing online gambling for its unmatched convenience and variety. One of the biggest advantages is accessibility. Unlike traditional brick-and-mortar casinos, virtual casinos allow you to play whenever it suits you best.
One of the strongest attractions is the enormous range of gaming options available. While land-based venues have space constraints, online casinos provide an endless assortment of games. From classic fruit machines to cutting-edge video slots with immersive themes, the choices are practically limitless. Want to get the hottest casino updates and promotions? Click here to follow us! — https://zenlivingairpurifiers.com/1win-apuestas-y-casino-online-en-un-lugar-seguro/
Bonuses, Rewards, and Promotions
One of the biggest draws of online casinos is the generous promotions and bonuses. Many platforms offer newcomers fantastic welcome packages, boosting their bankroll instantly. Regular players can take advantage of loyalty programs, cashback deals, and exclusive VIP rewards. While many casino games are based purely on luck, some require skill and strategy. For those who enjoy strategic play, poker offers opportunities to refine skills and increase winning chances. If you prefer a fast-paced, unpredictable experience, slots and roulette provide thrilling, luck-based gameplay.How to Gamble Responsibly Online
While online casinos offer fun and potential winnings, responsible gambling is crucial. By setting strict financial limits and staying disciplined, players can prevent gambling from becoming a problem. Trustworthy sites encourage responsible play through features like voluntary betting caps and time-out options. Are you an online casino enthusiast? What’s your go-to game? Share your thoughts and experiences in the comments below!
The Appeal of Online Gambling
There are many reasons why online casinos have gained massive traction. A key benefit is that online casinos are available anytime, anywhere. Unlike traditional brick-and-mortar casinos, virtual casinos allow you to play whenever it suits you best.
Another major reason for their popularity is the sheer variety of games. Traditional casinos are often limited by space, but online platforms can host thousands of different games. From classic fruit machines to cutting-edge video slots with immersive themes, the choices are practically limitless. Stay updated with the latest casino news, exclusive bonuses, and expert tips—follow us here! — https://advprocure.com/?p=1250
Unlocking Casino Bonuses
The abundance of promotions is one of the key benefits of playing at online casinos. New players are often welcomed with attractive sign-up bonuses, deposit matches, and free spins. Loyal customers are rewarded with tiered programs, reloading bonuses, and special incentives. Depending on your preferences, you can choose between pure chance games or those where skill makes a difference. In games like poker, knowledge and tactics can give players a significant edge over less experienced opponents. If you prefer a fast-paced, unpredictable experience, slots and roulette provide thrilling, luck-based gameplay.How to Gamble Responsibly Online
To ensure a positive experience, it’s vital to play responsibly and within limits. By setting strict financial limits and staying disciplined, players can prevent gambling from becoming a problem. Trustworthy sites encourage responsible play through features like voluntary betting caps and time-out options. Do you enjoy online casinos? What are your favorite games and biggest wins? Drop your opinions and stories in the discussion thread!
Why Online Casinos Are So Popular
The surge in popularity of online casinos is driven by several factors. Perhaps the most appealing aspect is how easy it is to access games. While land-based casinos have restrictions, virtual casinos allow you to play whenever it suits you best.
Another major reason for their popularity is the sheer variety of games. Physical casinos may offer a few hundred games at best, but digital platforms feature thousands. Players can enjoy everything from nostalgic one-armed bandits to modern 3D slots packed with special features. For exclusive deals and insights into the best casinos, check out our social media page! — https://propiedadespanama.org/category/blog/
Bonuses, Rewards, and Promotions
Bonuses and special offers make online gambling even more enticing. New players are often welcomed with attractive sign-up bonuses, deposit matches, and free spins. Loyal customers are rewarded with tiered programs, reloading bonuses, and special incentives. While many casino games are based purely on luck, some require skill and strategy. Poker, for instance, is a game of skill where experienced players can outplay beginners by reading opponents and making calculated decisions. On the other hand, slot machines and roulette rely entirely on chance, making them ideal for casual players looking for fun and excitement.Finding a Secure and Fair Casino
While online casinos offer fun and potential winnings, responsible gambling is crucial. By setting strict financial limits and staying disciplined, players can prevent gambling from becoming a problem. Licensed casinos provide responsible gambling measures, such as cooling-off periods and withdrawal restrictions, to help players stay in control. Have you played at an online casino before? What was your experience like? Share your thoughts and experiences in the comments below!
The Appeal of Online Gambling
More and more players are choosing online gambling for its unmatched convenience and variety. One of the biggest advantages is accessibility. Unlike traditional brick-and-mortar casinos, online platforms operate 24/7, letting players enjoy their favorite games at any time.
The vast selection of games also contributes to the widespread appeal. While land-based venues have space constraints, online casinos provide an endless assortment of games. Players can enjoy everything from nostalgic one-armed bandits to modern 3D slots packed with special features. Want to get the hottest casino updates and promotions? Click here to follow us! — https://www.apmdcng.com/1win-la-eleccion-de-los-jugadores-en-apuestas-y-casinos-online/
Bonuses, Rewards, and Promotions
Bonuses and special offers make online gambling even more enticing. Signing up usually comes with exciting perks like extra cash or free slot spins. The more you play, the more rewards you unlock, from cashback to personalized bonuses. Depending on your preferences, you can choose between pure chance games or those where skill makes a difference. Poker, for instance, is a game of skill where experienced players can outplay beginners by reading opponents and making calculated decisions. On the other hand, slot machines and roulette rely entirely on chance, making them ideal for casual players looking for fun and excitement.Finding a Secure and Fair Casino
While online casinos offer fun and potential winnings, responsible gambling is crucial. Smart bankroll management and self-control help players maintain a healthy approach to gambling. Licensed casinos provide responsible gambling measures, such as cooling-off periods and withdrawal restrictions, to help players stay in control. Are you an online casino enthusiast? What’s your go-to game? Tell us about your biggest wins or best casino moments!
Why Online Casinos Are So Popular
More and more players are choosing online gambling for its unmatched convenience and variety. One of the biggest advantages is accessibility. Unlike traditional brick-and-mortar casinos, virtual casinos allow you to play whenever it suits you best.
One of the strongest attractions is the enormous range of gaming options available. Traditional casinos are often limited by space, but online platforms can host thousands of different games. Whether you love old-school slots or cinematic video games, there’s something for everyone. Stay updated with the latest casino news, exclusive bonuses, and expert tips—follow us here! — https://rggupta.com/1win-la-eleccion-de-los-jugadores-en-apuestas-y-casinos-online/
Unlocking Casino Bonuses
One of the biggest draws of online casinos is the generous promotions and bonuses. New players are often welcomed with attractive sign-up bonuses, deposit matches, and free spins. The more you play, the more rewards you unlock, from cashback to personalized bonuses. While many casino games are based purely on luck, some require skill and strategy. For those who enjoy strategic play, poker offers opportunities to refine skills and increase winning chances. On the other hand, slot machines and roulette rely entirely on chance, making them ideal for casual players looking for fun and excitement.Finding a Secure and Fair Casino
While online casinos offer fun and potential winnings, responsible gambling is crucial. Smart bankroll management and self-control help players maintain a healthy approach to gambling. Reputable platforms also promote responsible gaming by offering tools like deposit limits, self-exclusion, and links to gambling support organizations. Are you an online casino enthusiast? What’s your go-to game? Share your thoughts and experiences in the comments below!
Definitely believe that which you stated. Your favorite reason seemed to be on the internet the easiest thing to
be aware of. I say to you, I definitely get irked while
people think about worries that they just do not know about.
You managed to hit the nail upon the top as well as defined out the whole
thing without having side effect , people could take a signal.
Will probably be back to get more. Thanks
Look at my blog :: honey4.testedhoneypot.com
Why Online Casinos Are So Popular
The surge in popularity of online casinos is driven by several factors. Perhaps the most appealing aspect is how easy it is to access games. While land-based casinos have restrictions, internet-based casinos never close, ensuring round-the-clock entertainment.
One of the strongest attractions is the enormous range of gaming options available. Traditional casinos are often limited by space, but online platforms can host thousands of different games. Players can enjoy everything from nostalgic one-armed bandits to modern 3D slots packed with special features. Stay updated with the latest casino news, exclusive bonuses, and expert tips—follow us here! — https://forcaffe.com.br/2024/12/10/1win-casino-online-y-casa-de-apuestas-que-se-adaptan-a-todos-los-gustos-y-preferencias/
Bonuses, Rewards, and Promotions
The abundance of promotions is one of the key benefits of playing at online casinos. Signing up usually comes with exciting perks like extra cash or free slot spins. The more you play, the more rewards you unlock, from cashback to personalized bonuses. Not all casino games are about luck—some demand strategic thinking and expertise. In games like poker, knowledge and tactics can give players a significant edge over less experienced opponents. On the other hand, slot machines and roulette rely entirely on chance, making them ideal for casual players looking for fun and excitement.Responsible Gambling & Choosing a Safe Casino
While online casinos offer fun and potential winnings, responsible gambling is crucial. Smart bankroll management and self-control help players maintain a healthy approach to gambling. Reputable platforms also promote responsible gaming by offering tools like deposit limits, self-exclusion, and links to gambling support organizations. Are you an online casino enthusiast? What’s your go-to game? Share your thoughts and experiences in the comments below!
Why Online Casinos Are So Popular
There are many reasons why online casinos have gained massive traction. Perhaps the most appealing aspect is how easy it is to access games. Unlike physical casinos that have operating hours, virtual casinos allow you to play whenever it suits you best.
One of the strongest attractions is the enormous range of gaming options available. While land-based venues have space constraints, online casinos provide an endless assortment of games. Players can enjoy everything from nostalgic one-armed bandits to modern 3D slots packed with special features. Stay updated with the latest casino news, exclusive bonuses, and expert tips—follow us here! — https://vong-medical.com/2024/12/10/1win-casino-descubre-todo-lo-que-necesitas-saber-sobre-el-juego-en-linea-en-un-solo-lugar/
Unlocking Casino Bonuses
The abundance of promotions is one of the key benefits of playing at online casinos. New players are often welcomed with attractive sign-up bonuses, deposit matches, and free spins. The more you play, the more rewards you unlock, from cashback to personalized bonuses. Not all casino games are about luck—some demand strategic thinking and expertise. Poker, for instance, is a game of skill where experienced players can outplay beginners by reading opponents and making calculated decisions. On the other hand, slot machines and roulette rely entirely on chance, making them ideal for casual players looking for fun and excitement.Responsible Gambling & Choosing a Safe Casino
As exciting as online gambling can be, it’s essential to practice responsible gaming. Smart bankroll management and self-control help players maintain a healthy approach to gambling. Trustworthy sites encourage responsible play through features like voluntary betting caps and time-out options. Are you an online casino enthusiast? What’s your go-to game? Drop your opinions and stories in the discussion thread!
Why Online Casinos Are So Popular
More and more players are choosing online gambling for its unmatched convenience and variety. One of the biggest advantages is accessibility. Unlike traditional brick-and-mortar casinos, online platforms operate 24/7, letting players enjoy their favorite games at any time.
One of the strongest attractions is the enormous range of gaming options available. While land-based venues have space constraints, online casinos provide an endless assortment of games. Players can enjoy everything from nostalgic one-armed bandits to modern 3D slots packed with special features. Stay updated with the latest casino news, exclusive bonuses, and expert tips—follow us here! — https://blueartworld.com/1win-la-eleccion-definitiva-para-apostadores-y-jugadores-de-casino/
Bonuses, Rewards, and Promotions
One of the biggest draws of online casinos is the generous promotions and bonuses. Many platforms offer newcomers fantastic welcome packages, boosting their bankroll instantly. Regular players can take advantage of loyalty programs, cashback deals, and exclusive VIP rewards. While many casino games are based purely on luck, some require skill and strategy. For those who enjoy strategic play, poker offers opportunities to refine skills and increase winning chances. On the other hand, slot machines and roulette rely entirely on chance, making them ideal for casual players looking for fun and excitement.How to Gamble Responsibly Online
To ensure a positive experience, it’s vital to play responsibly and within limits. Smart bankroll management and self-control help players maintain a healthy approach to gambling. Reputable platforms also promote responsible gaming by offering tools like deposit limits, self-exclusion, and links to gambling support organizations. Do you enjoy online casinos? What are your favorite games and biggest wins? Share your thoughts and experiences in the comments below!
Reasons Why Online Casinos Are Booming
The surge in popularity of online casinos is driven by several factors. Perhaps the most appealing aspect is how easy it is to access games. Unlike physical casinos that have operating hours, virtual casinos allow you to play whenever it suits you best.
One of the strongest attractions is the enormous range of gaming options available. Physical casinos may offer a few hundred games at best, but digital platforms feature thousands. From classic fruit machines to cutting-edge video slots with immersive themes, the choices are practically limitless. Stay updated with the latest casino news, exclusive bonuses, and expert tips—follow us here! — https://yudaswed.com/1win-todo-lo-que-necesitas-saber-sobre-el-casino-en-linea-1win/
Unlocking Casino Bonuses
The abundance of promotions is one of the key benefits of playing at online casinos. Many platforms offer newcomers fantastic welcome packages, boosting their bankroll instantly. The more you play, the more rewards you unlock, from cashback to personalized bonuses. Depending on your preferences, you can choose between pure chance games or those where skill makes a difference. For those who enjoy strategic play, poker offers opportunities to refine skills and increase winning chances. If you prefer a fast-paced, unpredictable experience, slots and roulette provide thrilling, luck-based gameplay.Responsible Gambling & Choosing a Safe Casino
To ensure a positive experience, it’s vital to play responsibly and within limits. By setting strict financial limits and staying disciplined, players can prevent gambling from becoming a problem. Trustworthy sites encourage responsible play through features like voluntary betting caps and time-out options. Have you played at an online casino before? What was your experience like? Tell us about your biggest wins or best casino moments!
Why Online Casinos Are So Popular
The surge in popularity of online casinos is driven by several factors. One of the biggest advantages is accessibility. Unlike traditional brick-and-mortar casinos, online platforms operate 24/7, letting players enjoy their favorite games at any time.
Another major reason for their popularity is the sheer variety of games. While land-based venues have space constraints, online casinos provide an endless assortment of games. From classic fruit machines to cutting-edge video slots with immersive themes, the choices are practically limitless. For exclusive deals and insights into the best casinos, check out our social media page! — https://www.amazingtajmahal.com/author/admin/page/23/
How Online Casinos Keep Players Engaged
The abundance of promotions is one of the key benefits of playing at online casinos. New players are often welcomed with attractive sign-up bonuses, deposit matches, and free spins. Loyal customers are rewarded with tiered programs, reloading bonuses, and special incentives. While many casino games are based purely on luck, some require skill and strategy. For those who enjoy strategic play, poker offers opportunities to refine skills and increase winning chances. If you prefer a fast-paced, unpredictable experience, slots and roulette provide thrilling, luck-based gameplay.How to Gamble Responsibly Online
To ensure a positive experience, it’s vital to play responsibly and within limits. By setting strict financial limits and staying disciplined, players can prevent gambling from becoming a problem. Licensed casinos provide responsible gambling measures, such as cooling-off periods and withdrawal restrictions, to help players stay in control. Do you enjoy online casinos? What are your favorite games and biggest wins? Tell us about your biggest wins or best casino moments!
The Appeal of Online Gambling
More and more players are choosing online gambling for its unmatched convenience and variety. One of the biggest advantages is accessibility. Unlike traditional brick-and-mortar casinos, virtual casinos allow you to play whenever it suits you best.
Another major reason for their popularity is the sheer variety of games. While land-based venues have space constraints, online casinos provide an endless assortment of games. Whether you love old-school slots or cinematic video games, there’s something for everyone. Stay updated with the latest casino news, exclusive bonuses, and expert tips—follow us here! — https://brainbuildersplatformservices.com/wp/2024/12/26/1win-casino-online-y-casa-de-apuestas-para-diversion-sin-limites-2/
Unlocking Casino Bonuses
The abundance of promotions is one of the key benefits of playing at online casinos. Signing up usually comes with exciting perks like extra cash or free slot spins. The more you play, the more rewards you unlock, from cashback to personalized bonuses. Not all casino games are about luck—some demand strategic thinking and expertise. In games like poker, knowledge and tactics can give players a significant edge over less experienced opponents. For those who want quick and easy entertainment, luck-based games like slots deliver pure adrenaline.Responsible Gambling & Choosing a Safe Casino
To ensure a positive experience, it’s vital to play responsibly and within limits. Setting personal limits, managing your budget wisely, and avoiding chasing losses are key to enjoying online casinos safely. Licensed casinos provide responsible gambling measures, such as cooling-off periods and withdrawal restrictions, to help players stay in control. Are you an online casino enthusiast? What’s your go-to game? Share your thoughts and experiences in the comments below!
Reasons Why Online Casinos Are Booming
There are many reasons why online casinos have gained massive traction. A key benefit is that online casinos are available anytime, anywhere. Unlike traditional brick-and-mortar casinos, online platforms operate 24/7, letting players enjoy their favorite games at any time.
Another major reason for their popularity is the sheer variety of games. While land-based venues have space constraints, online casinos provide an endless assortment of games. Whether you love old-school slots or cinematic video games, there’s something for everyone. Stay updated with the latest casino news, exclusive bonuses, and expert tips—follow us here! — http://silverferndanceacademy.co.uk/2025/01/23/1win-casino-online-y-casa-de-apuestas-para-diversion-sin-limites/
Bonuses, Rewards, and Promotions
Bonuses and special offers make online gambling even more enticing. Many platforms offer newcomers fantastic welcome packages, boosting their bankroll instantly. The more you play, the more rewards you unlock, from cashback to personalized bonuses. Not all casino games are about luck—some demand strategic thinking and expertise. Poker, for instance, is a game of skill where experienced players can outplay beginners by reading opponents and making calculated decisions. On the other hand, slot machines and roulette rely entirely on chance, making them ideal for casual players looking for fun and excitement.How to Gamble Responsibly Online
While online casinos offer fun and potential winnings, responsible gambling is crucial. By setting strict financial limits and staying disciplined, players can prevent gambling from becoming a problem. Trustworthy sites encourage responsible play through features like voluntary betting caps and time-out options. Have you played at an online casino before? What was your experience like? Share your thoughts and experiences in the comments below!
Why Online Casinos Are So Popular
The surge in popularity of online casinos is driven by several factors. A key benefit is that online casinos are available anytime, anywhere. Unlike traditional brick-and-mortar casinos, internet-based casinos never close, ensuring round-the-clock entertainment.
One of the strongest attractions is the enormous range of gaming options available. Traditional casinos are often limited by space, but online platforms can host thousands of different games. From classic fruit machines to cutting-edge video slots with immersive themes, the choices are practically limitless. Want to get the hottest casino updates and promotions? Click here to follow us! — https://www.movhuve.org/blog/2024/12/26/1win-casino-online-y-casa-de-apuestas-diversion-y-emocion-para-todos-los-gustos/
Unlocking Casino Bonuses
Bonuses and special offers make online gambling even more enticing. New players are often welcomed with attractive sign-up bonuses, deposit matches, and free spins. Regular players can take advantage of loyalty programs, cashback deals, and exclusive VIP rewards. Depending on your preferences, you can choose between pure chance games or those where skill makes a difference. Poker, for instance, is a game of skill where experienced players can outplay beginners by reading opponents and making calculated decisions. If you prefer a fast-paced, unpredictable experience, slots and roulette provide thrilling, luck-based gameplay.Responsible Gambling & Choosing a Safe Casino
As exciting as online gambling can be, it’s essential to practice responsible gaming. Smart bankroll management and self-control help players maintain a healthy approach to gambling. Trustworthy sites encourage responsible play through features like voluntary betting caps and time-out options. Are you an online casino enthusiast? What’s your go-to game? Drop your opinions and stories in the discussion thread!
mostbet kg отзывы https://mostbet6029.ru .
Reasons Why Online Casinos Are Booming
There are many reasons why online casinos have gained massive traction. One of the biggest advantages is accessibility. Unlike traditional brick-and-mortar casinos, internet-based casinos never close, ensuring round-the-clock entertainment.
Another major reason for their popularity is the sheer variety of games. Traditional casinos are often limited by space, but online platforms can host thousands of different games. From classic fruit machines to cutting-edge video slots with immersive themes, the choices are practically limitless. For exclusive deals and insights into the best casinos, check out our social media page! — https://wjmfg.com/?attachment_id=662
How Online Casinos Keep Players Engaged
Bonuses and special offers make online gambling even more enticing. Many platforms offer newcomers fantastic welcome packages, boosting their bankroll instantly. Loyal customers are rewarded with tiered programs, reloading bonuses, and special incentives. Not all casino games are about luck—some demand strategic thinking and expertise. For those who enjoy strategic play, poker offers opportunities to refine skills and increase winning chances. On the other hand, slot machines and roulette rely entirely on chance, making them ideal for casual players looking for fun and excitement.Finding a Secure and Fair Casino
To ensure a positive experience, it’s vital to play responsibly and within limits. By setting strict financial limits and staying disciplined, players can prevent gambling from becoming a problem. Licensed casinos provide responsible gambling measures, such as cooling-off periods and withdrawal restrictions, to help players stay in control. Have you played at an online casino before? What was your experience like? Share your thoughts and experiences in the comments below!
¡Hola gammers!
Recibe 10 euros gratis por registrarte en un casino online. 10eurosgratissindepositocasino No necesitas tarjeta ni depГіsito. Solo crea tu cuenta y empieza a jugar con dinero real. Ideal para nuevos jugadores que quieren probar suerte gratis.
п»їObtГ©n 10 euros gratis sin depГіsito en tu casino favorito. Disfruta de tragamonedas, ruletas y mГЎs sin arriesgar tu dinero. RegГstrate y empieza a ganar con este bono exclusivo. Juega ahora sin preocuparte por tu saldo y retira tus ganancias fГЎcilmente.
Toda la información en el enlace — п»їhttps://10eurosgratissindepositocasino.xyz/
¡Que tengas buenos juegos!
¡Hola usuarios de casino!
En EspaГ±a puedes jugar en casinos legales que ofrecen 10 euros gratis. casino 10 euros gratis sin deposito Sin necesidad de depositar, solo con registrarte. Juega seguro y gana dinero real.
En EspaГ±a puedes conseguir 10 euros gratis sin depГіsito en casinos online regulados. Solo tienes que registrarte y reclamar tu bono para jugar gratis. Disfruta de los mejores juegos sin gastar nada y gana premios reales sin invertir.
Toda la información en el enlace — п»їhttps://10eurosgratissindepositocasino.xyz/
¡Que tengas buenos beneficios!
¡Hola apostadores!
Recibe 10€ gratis en tu casino online preferido. winzingo 10 euros gratis Ideal para comenzar a jugar sin invertir. Explora tragaperras, ruleta, blackjack y mГЎs. Simplemente regГstrate y reclama tu bono sin depГіsito.
Suertia te regala 10 euros gratis por registrarte. Disfruta del mejor casino online sin necesidad de depГіsito. Juega gratis y gana premios en efectivo. ВЎActiva tu bono hoy mismo!
Toda la información en el enlace — п»їhttps://10eurosgratissindepositocasino.xyz/
¡Que tengas buenos ganancias!
¡Hola jugadores de casino!
Aprovecha un bono sin depГіsito de 10 euros gratis. 10 euros gratis casino RegГstrate y empieza a jugar sin poner un solo euro. Perfecto para conocer el casino antes de invertir.
Con 10 euros gratis puedes jugar en el casino sin necesidad de depositar. Ideal para probar sin compromisos. RegГstrate y juega como un profesional.
Toda la información en el enlace — п»їhttps://10eurosgratissindepositocasino.xyz/
¡Que tengas buenos ganancias!
Reasons Why Online Casinos Are Booming
There are many reasons why online casinos have gained massive traction. One of the biggest advantages is accessibility. Unlike physical casinos that have operating hours, online platforms operate 24/7, letting players enjoy their favorite games at any time.
Another major reason for their popularity is the sheer variety of games. Physical casinos may offer a few hundred games at best, but digital platforms feature thousands. Whether you love old-school slots or cinematic video games, there’s something for everyone. For exclusive deals and insights into the best casinos, check out our social media page! — https://dermosys.pl/component/k2/item/3-etiam-quis-mi?start=7390
Unlocking Casino Bonuses
Bonuses and special offers make online gambling even more enticing. New players are often welcomed with attractive sign-up bonuses, deposit matches, and free spins. Loyal customers are rewarded with tiered programs, reloading bonuses, and special incentives. Not all casino games are about luck—some demand strategic thinking and expertise. For those who enjoy strategic play, poker offers opportunities to refine skills and increase winning chances. For those who want quick and easy entertainment, luck-based games like slots deliver pure adrenaline.How to Gamble Responsibly Online
To ensure a positive experience, it’s vital to play responsibly and within limits. Setting personal limits, managing your budget wisely, and avoiding chasing losses are key to enjoying online casinos safely. Licensed casinos provide responsible gambling measures, such as cooling-off periods and withdrawal restrictions, to help players stay in control. Do you enjoy online casinos? What are your favorite games and biggest wins? Share your thoughts and experiences in the comments below!
Reasons Why Online Casinos Are Booming
There are many reasons why online casinos have gained massive traction. One of the biggest advantages is accessibility. Unlike physical casinos that have operating hours, online platforms operate 24/7, letting players enjoy their favorite games at any time.
One of the strongest attractions is the enormous range of gaming options available. Traditional casinos are often limited by space, but online platforms can host thousands of different games. Whether you love old-school slots or cinematic video games, there’s something for everyone. For exclusive deals and insights into the best casinos, check out our social media page! — https://barretomarketingdigital.com.br/2024/12/26/1win-casino-online-y-casa-de-apuestas-ofrecen-diversion-y-emociones-para-todos-los-gustos/
Bonuses, Rewards, and Promotions
The abundance of promotions is one of the key benefits of playing at online casinos. Many platforms offer newcomers fantastic welcome packages, boosting their bankroll instantly. The more you play, the more rewards you unlock, from cashback to personalized bonuses. While many casino games are based purely on luck, some require skill and strategy. For those who enjoy strategic play, poker offers opportunities to refine skills and increase winning chances. For those who want quick and easy entertainment, luck-based games like slots deliver pure adrenaline.How to Gamble Responsibly Online
While online casinos offer fun and potential winnings, responsible gambling is crucial. Smart bankroll management and self-control help players maintain a healthy approach to gambling. Trustworthy sites encourage responsible play through features like voluntary betting caps and time-out options. Are you an online casino enthusiast? What’s your go-to game? Share your thoughts and experiences in the comments below!
партнёрка 1win https://1win6005.ru .
Why Online Casinos Are So Popular
More and more players are choosing online gambling for its unmatched convenience and variety. Perhaps the most appealing aspect is how easy it is to access games. While land-based casinos have restrictions, online platforms operate 24/7, letting players enjoy their favorite games at any time.
Another major reason for their popularity is the sheer variety of games. Traditional casinos are often limited by space, but online platforms can host thousands of different games. Players can enjoy everything from nostalgic one-armed bandits to modern 3D slots packed with special features. Stay updated with the latest casino news, exclusive bonuses, and expert tips—follow us here! — https://sticaro.com/1win-todo-sobre-el-casino-en-linea-1win/
Bonuses, Rewards, and Promotions
One of the biggest draws of online casinos is the generous promotions and bonuses. New players are often welcomed with attractive sign-up bonuses, deposit matches, and free spins. Regular players can take advantage of loyalty programs, cashback deals, and exclusive VIP rewards. While many casino games are based purely on luck, some require skill and strategy. For those who enjoy strategic play, poker offers opportunities to refine skills and increase winning chances. On the other hand, slot machines and roulette rely entirely on chance, making them ideal for casual players looking for fun and excitement.How to Gamble Responsibly Online
As exciting as online gambling can be, it’s essential to practice responsible gaming. By setting strict financial limits and staying disciplined, players can prevent gambling from becoming a problem. Reputable platforms also promote responsible gaming by offering tools like deposit limits, self-exclusion, and links to gambling support organizations. Are you an online casino enthusiast? What’s your go-to game? Drop your opinions and stories in the discussion thread!
The Appeal of Online Gambling
The surge in popularity of online casinos is driven by several factors. One of the biggest advantages is accessibility. Unlike physical casinos that have operating hours, internet-based casinos never close, ensuring round-the-clock entertainment.
The vast selection of games also contributes to the widespread appeal. Traditional casinos are often limited by space, but online platforms can host thousands of different games. Whether you love old-school slots or cinematic video games, there’s something for everyone. Want to get the hottest casino updates and promotions? Click here to follow us! — https://www.sont.cc/message/index.php?class1=52&page=13492&lang=en
How Online Casinos Keep Players Engaged
Bonuses and special offers make online gambling even more enticing. New players are often welcomed with attractive sign-up bonuses, deposit matches, and free spins. Loyal customers are rewarded with tiered programs, reloading bonuses, and special incentives. Not all casino games are about luck—some demand strategic thinking and expertise. For those who enjoy strategic play, poker offers opportunities to refine skills and increase winning chances. On the other hand, slot machines and roulette rely entirely on chance, making them ideal for casual players looking for fun and excitement.How to Gamble Responsibly Online
As exciting as online gambling can be, it’s essential to practice responsible gaming. Smart bankroll management and self-control help players maintain a healthy approach to gambling. Trustworthy sites encourage responsible play through features like voluntary betting caps and time-out options. Are you an online casino enthusiast? What’s your go-to game? Share your thoughts and experiences in the comments below!
Why Online Casinos Are So Popular
The surge in popularity of online casinos is driven by several factors. One of the biggest advantages is accessibility. Unlike physical casinos that have operating hours, virtual casinos allow you to play whenever it suits you best.
The vast selection of games also contributes to the widespread appeal. While land-based venues have space constraints, online casinos provide an endless assortment of games. From classic fruit machines to cutting-edge video slots with immersive themes, the choices are practically limitless. For exclusive deals and insights into the best casinos, check out our social media page! — http://www.fsh.mi.th/newswb3/index.php?action=profile;u=81230;sa=showPosts
Unlocking Casino Bonuses
Bonuses and special offers make online gambling even more enticing. Signing up usually comes with exciting perks like extra cash or free slot spins. The more you play, the more rewards you unlock, from cashback to personalized bonuses. Not all casino games are about luck—some demand strategic thinking and expertise. In games like poker, knowledge and tactics can give players a significant edge over less experienced opponents. For those who want quick and easy entertainment, luck-based games like slots deliver pure adrenaline.Responsible Gambling & Choosing a Safe Casino
While online casinos offer fun and potential winnings, responsible gambling is crucial. Smart bankroll management and self-control help players maintain a healthy approach to gambling. Trustworthy sites encourage responsible play through features like voluntary betting caps and time-out options. Are you an online casino enthusiast? What’s your go-to game? Tell us about your biggest wins or best casino moments!
Wow a lot of superb material.
My blog — Online Sports Betting (https://ktk-git.gubkin.pro/adrianpeele171/online-sports-betting-3490/-/issues/38)
Why Online Casinos Are So Popular
There are many reasons why online casinos have gained massive traction. Perhaps the most appealing aspect is how easy it is to access games. While land-based casinos have restrictions, online platforms operate 24/7, letting players enjoy their favorite games at any time.
One of the strongest attractions is the enormous range of gaming options available. Traditional casinos are often limited by space, but online platforms can host thousands of different games. From classic fruit machines to cutting-edge video slots with immersive themes, the choices are practically limitless. For exclusive deals and insights into the best casinos, check out our social media page! — https://domains.tntcode.com/ip/172.67.222.50
Bonuses, Rewards, and Promotions
One of the biggest draws of online casinos is the generous promotions and bonuses. New players are often welcomed with attractive sign-up bonuses, deposit matches, and free spins. The more you play, the more rewards you unlock, from cashback to personalized bonuses. Depending on your preferences, you can choose between pure chance games or those where skill makes a difference. For those who enjoy strategic play, poker offers opportunities to refine skills and increase winning chances. On the other hand, slot machines and roulette rely entirely on chance, making them ideal for casual players looking for fun and excitement.How to Gamble Responsibly Online
As exciting as online gambling can be, it’s essential to practice responsible gaming. Smart bankroll management and self-control help players maintain a healthy approach to gambling. Trustworthy sites encourage responsible play through features like voluntary betting caps and time-out options. Do you enjoy online casinos? What are your favorite games and biggest wins? Tell us about your biggest wins or best casino moments!
Why Online Casinos Are So Popular
There are many reasons why online casinos have gained massive traction. One of the biggest advantages is accessibility. While land-based casinos have restrictions, internet-based casinos never close, ensuring round-the-clock entertainment.
Another major reason for their popularity is the sheer variety of games. While land-based venues have space constraints, online casinos provide an endless assortment of games. Whether you love old-school slots or cinematic video games, there’s something for everyone. Stay updated with the latest casino news, exclusive bonuses, and expert tips—follow us here! — https://zenlivingairpurifiers.com/1win-apuestas-y-casino-online-en-un-lugar-seguro/
How Online Casinos Keep Players Engaged
Bonuses and special offers make online gambling even more enticing. Signing up usually comes with exciting perks like extra cash or free slot spins. Regular players can take advantage of loyalty programs, cashback deals, and exclusive VIP rewards. Depending on your preferences, you can choose between pure chance games or those where skill makes a difference. For those who enjoy strategic play, poker offers opportunities to refine skills and increase winning chances. On the other hand, slot machines and roulette rely entirely on chance, making them ideal for casual players looking for fun and excitement.How to Gamble Responsibly Online
To ensure a positive experience, it’s vital to play responsibly and within limits. By setting strict financial limits and staying disciplined, players can prevent gambling from becoming a problem. Trustworthy sites encourage responsible play through features like voluntary betting caps and time-out options. Have you played at an online casino before? What was your experience like? Tell us about your biggest wins or best casino moments!
Here is the detailed schedule of lotto games held by PCSO from Monday to Sunday.
Here is my blog post … http://git.mahaines.com/dedrajiminez08
The Appeal of Online Gambling
The surge in popularity of online casinos is driven by several factors. One of the biggest advantages is accessibility. While land-based casinos have restrictions, virtual casinos allow you to play whenever it suits you best.
Another major reason for their popularity is the sheer variety of games. Physical casinos may offer a few hundred games at best, but digital platforms feature thousands. Players can enjoy everything from nostalgic one-armed bandits to modern 3D slots packed with special features. For exclusive deals and insights into the best casinos, check out our social media page! — https://ryrfam.com/2024/12/26/1win-casino-y-casa-de-apuestas-todo-lo-que-necesitas-saber/
How Online Casinos Keep Players Engaged
One of the biggest draws of online casinos is the generous promotions and bonuses. Many platforms offer newcomers fantastic welcome packages, boosting their bankroll instantly. The more you play, the more rewards you unlock, from cashback to personalized bonuses. Depending on your preferences, you can choose between pure chance games or those where skill makes a difference. For those who enjoy strategic play, poker offers opportunities to refine skills and increase winning chances. On the other hand, slot machines and roulette rely entirely on chance, making them ideal for casual players looking for fun and excitement.Finding a Secure and Fair Casino
As exciting as online gambling can be, it’s essential to practice responsible gaming. Smart bankroll management and self-control help players maintain a healthy approach to gambling. Licensed casinos provide responsible gambling measures, such as cooling-off periods and withdrawal restrictions, to help players stay in control. Are you an online casino enthusiast? What’s your go-to game? Share your thoughts and experiences in the comments below!
algeria virtual number
Reasons Why Online Casinos Are Booming
The surge in popularity of online casinos is driven by several factors. Perhaps the most appealing aspect is how easy it is to access games. While land-based casinos have restrictions, online platforms operate 24/7, letting players enjoy their favorite games at any time.
Another major reason for their popularity is the sheer variety of games. Traditional casinos are often limited by space, but online platforms can host thousands of different games. Players can enjoy everything from nostalgic one-armed bandits to modern 3D slots packed with special features. Want to get the hottest casino updates and promotions? Click here to follow us! — https://panoceanictz.com/2025/01/23/1win-apuestas-y-casino-online-en-un-solo-sitio/
How Online Casinos Keep Players Engaged
Bonuses and special offers make online gambling even more enticing. New players are often welcomed with attractive sign-up bonuses, deposit matches, and free spins. Regular players can take advantage of loyalty programs, cashback deals, and exclusive VIP rewards. While many casino games are based purely on luck, some require skill and strategy. For those who enjoy strategic play, poker offers opportunities to refine skills and increase winning chances. For those who want quick and easy entertainment, luck-based games like slots deliver pure adrenaline.How to Gamble Responsibly Online
As exciting as online gambling can be, it’s essential to practice responsible gaming. Setting personal limits, managing your budget wisely, and avoiding chasing losses are key to enjoying online casinos safely. Reputable platforms also promote responsible gaming by offering tools like deposit limits, self-exclusion, and links to gambling support organizations. Have you played at an online casino before? What was your experience like? Drop your opinions and stories in the discussion thread!
Радуйтесь чистоте вашего дома без лишних забот! Наша клининговая компания в Санкт-Петербурге предлагает качественные услуги уборки: от обычной чистки до сложных процедур. Мы понимаем, как необходимо возвращаться в комфортное и аккуратное пространство, поэтому наши профессионалы используют только безвредные и эффективные средства. Перемещайтесь к https://spb24uslugi.ru Вверьте заботу о чистоте вашего дома нам и проводите время с любимыми с удовольствием! Заказывайте уборку у нас — и вы позабудете о пыли и неразберихе.
Reasons Why Online Casinos Are Booming
There are many reasons why online casinos have gained massive traction. One of the biggest advantages is accessibility. While land-based casinos have restrictions, internet-based casinos never close, ensuring round-the-clock entertainment.
The vast selection of games also contributes to the widespread appeal. Traditional casinos are often limited by space, but online platforms can host thousands of different games. Players can enjoy everything from nostalgic one-armed bandits to modern 3D slots packed with special features. Stay updated with the latest casino news, exclusive bonuses, and expert tips—follow us here! — https://nettvpros.com/car-rental/uncategorized/1win-la-eleccion-de-los-jugadores-en-apuestas-y-casinos-online/
Unlocking Casino Bonuses
Bonuses and special offers make online gambling even more enticing. New players are often welcomed with attractive sign-up bonuses, deposit matches, and free spins. The more you play, the more rewards you unlock, from cashback to personalized bonuses. While many casino games are based purely on luck, some require skill and strategy. In games like poker, knowledge and tactics can give players a significant edge over less experienced opponents. On the other hand, slot machines and roulette rely entirely on chance, making them ideal for casual players looking for fun and excitement.How to Gamble Responsibly Online
As exciting as online gambling can be, it’s essential to practice responsible gaming. By setting strict financial limits and staying disciplined, players can prevent gambling from becoming a problem. Reputable platforms also promote responsible gaming by offering tools like deposit limits, self-exclusion, and links to gambling support organizations. Have you played at an online casino before? What was your experience like? Drop your opinions and stories in the discussion thread!
The Appeal of Online Gambling
The surge in popularity of online casinos is driven by several factors. A key benefit is that online casinos are available anytime, anywhere. Unlike physical casinos that have operating hours, online platforms operate 24/7, letting players enjoy their favorite games at any time.
One of the strongest attractions is the enormous range of gaming options available. Physical casinos may offer a few hundred games at best, but digital platforms feature thousands. Players can enjoy everything from nostalgic one-armed bandits to modern 3D slots packed with special features. Want to get the hottest casino updates and promotions? Click here to follow us! — https://onairx.com/1win-descubre-por-que-es-la-plataforma-de-apuestas-y-casino-numero-uno-en-el-mercado/
How Online Casinos Keep Players Engaged
One of the biggest draws of online casinos is the generous promotions and bonuses. New players are often welcomed with attractive sign-up bonuses, deposit matches, and free spins. Regular players can take advantage of loyalty programs, cashback deals, and exclusive VIP rewards. Not all casino games are about luck—some demand strategic thinking and expertise. In games like poker, knowledge and tactics can give players a significant edge over less experienced opponents. On the other hand, slot machines and roulette rely entirely on chance, making them ideal for casual players looking for fun and excitement.How to Gamble Responsibly Online
As exciting as online gambling can be, it’s essential to practice responsible gaming. By setting strict financial limits and staying disciplined, players can prevent gambling from becoming a problem. Reputable platforms also promote responsible gaming by offering tools like deposit limits, self-exclusion, and links to gambling support organizations. Do you enjoy online casinos? What are your favorite games and biggest wins? Tell us about your biggest wins or best casino moments!
Why Online Casinos Are So Popular
More and more players are choosing online gambling for its unmatched convenience and variety. A key benefit is that online casinos are available anytime, anywhere. Unlike traditional brick-and-mortar casinos, virtual casinos allow you to play whenever it suits you best.
Another major reason for their popularity is the sheer variety of games. While land-based venues have space constraints, online casinos provide an endless assortment of games. Whether you love old-school slots or cinematic video games, there’s something for everyone. Want to get the hottest casino updates and promotions? Click here to follow us! — https://www.syncm.net/?p=3197
Unlocking Casino Bonuses
One of the biggest draws of online casinos is the generous promotions and bonuses. Many platforms offer newcomers fantastic welcome packages, boosting their bankroll instantly. Regular players can take advantage of loyalty programs, cashback deals, and exclusive VIP rewards. Not all casino games are about luck—some demand strategic thinking and expertise. In games like poker, knowledge and tactics can give players a significant edge over less experienced opponents. For those who want quick and easy entertainment, luck-based games like slots deliver pure adrenaline.How to Gamble Responsibly Online
As exciting as online gambling can be, it’s essential to practice responsible gaming. Setting personal limits, managing your budget wisely, and avoiding chasing losses are key to enjoying online casinos safely. Trustworthy sites encourage responsible play through features like voluntary betting caps and time-out options. Have you played at an online casino before? What was your experience like? Drop your opinions and stories in the discussion thread!
I’m really loving the theme/design of your web site.
Do you ever run into any internet browser compatibility problems?
A few of my blog readers have complained about my site not operating correctly in Explorer but looks
great in Firefox. Do you have any suggestions to help fix this issue?
my web site https://honey4.testedhoneypot.com/
1win.com https://www.1win5010.ru .
Why Online Casinos Are So Popular
More and more players are choosing online gambling for its unmatched convenience and variety. One of the biggest advantages is accessibility. Unlike physical casinos that have operating hours, online platforms operate 24/7, letting players enjoy their favorite games at any time.
The vast selection of games also contributes to the widespread appeal. While land-based venues have space constraints, online casinos provide an endless assortment of games. Players can enjoy everything from nostalgic one-armed bandits to modern 3D slots packed with special features. For exclusive deals and insights into the best casinos, check out our social media page! — https://www.quepasaweb.com.ar/como-apostar-a-1win-en-colombia/
Bonuses, Rewards, and Promotions
The abundance of promotions is one of the key benefits of playing at online casinos. Many platforms offer newcomers fantastic welcome packages, boosting their bankroll instantly. Regular players can take advantage of loyalty programs, cashback deals, and exclusive VIP rewards. Depending on your preferences, you can choose between pure chance games or those where skill makes a difference. In games like poker, knowledge and tactics can give players a significant edge over less experienced opponents. If you prefer a fast-paced, unpredictable experience, slots and roulette provide thrilling, luck-based gameplay.Responsible Gambling & Choosing a Safe Casino
As exciting as online gambling can be, it’s essential to practice responsible gaming. Smart bankroll management and self-control help players maintain a healthy approach to gambling. Trustworthy sites encourage responsible play through features like voluntary betting caps and time-out options. Do you enjoy online casinos? What are your favorite games and biggest wins? Drop your opinions and stories in the discussion thread!
Hi fans of humor!
Basketball dad jokes so bad… they’re actually great. basketball play on words Get ready to groan, giggle, and maybe high-five your inner dad.
Laugh like you’re courtside with basketball one liners that slam every time. Great for players, fans, and pun lovers.
Toda la información en el enlace — п»їhttps://ontheborder.com.au/the-history-of-tequila/#comment-2550
Wishing you lots of funny moments!
Hi fans of humor!
Short basketball puns that slam dunk your boredom. basketball food puns Quick, quirky, and perfect for any baller’s vibe.
Basketball.puns so funny, they’ll make your friends call a timeout just to laugh. Warning: May cause uncontrollable giggles.
Toda la información en el enlace — п»їhttps://ontheborder.com.au/the-history-of-tequila/#comment-2550
Wishing you lots of punchlines!
Hi if you’re laughing, you’re in!
Cross over into comedy greatness with basketball play on words that spin, shoot, and score nonstop laughs. basketballpuns.com
Keep your humor game sharp with basketball food puns. These tasty jokes are cooked up fresh and seasoned with clever wordplay.
Toda la información en el enlace — п»їhttps://ontheborder.com.au/the-history-of-tequila/#comment-2550
Wishing you lots of comedy gold!
Reasons Why Online Casinos Are Booming
More and more players are choosing online gambling for its unmatched convenience and variety. One of the biggest advantages is accessibility. Unlike physical casinos that have operating hours, internet-based casinos never close, ensuring round-the-clock entertainment.
Another major reason for their popularity is the sheer variety of games. Traditional casinos are often limited by space, but online platforms can host thousands of different games. From classic fruit machines to cutting-edge video slots with immersive themes, the choices are practically limitless. For exclusive deals and insights into the best casinos, check out our social media page! — https://ajwaaalbaladrestaurant.com/archives/2119
How Online Casinos Keep Players Engaged
The abundance of promotions is one of the key benefits of playing at online casinos. New players are often welcomed with attractive sign-up bonuses, deposit matches, and free spins. Regular players can take advantage of loyalty programs, cashback deals, and exclusive VIP rewards. Not all casino games are about luck—some demand strategic thinking and expertise. In games like poker, knowledge and tactics can give players a significant edge over less experienced opponents. On the other hand, slot machines and roulette rely entirely on chance, making them ideal for casual players looking for fun and excitement.Finding a Secure and Fair Casino
As exciting as online gambling can be, it’s essential to practice responsible gaming. Smart bankroll management and self-control help players maintain a healthy approach to gambling. Reputable platforms also promote responsible gaming by offering tools like deposit limits, self-exclusion, and links to gambling support organizations. Are you an online casino enthusiast? What’s your go-to game? Tell us about your biggest wins or best casino moments!
Reasons Why Online Casinos Are Booming
There are many reasons why online casinos have gained massive traction. A key benefit is that online casinos are available anytime, anywhere. Unlike traditional brick-and-mortar casinos, online platforms operate 24/7, letting players enjoy their favorite games at any time.
Another major reason for their popularity is the sheer variety of games. Traditional casinos are often limited by space, but online platforms can host thousands of different games. Players can enjoy everything from nostalgic one-armed bandits to modern 3D slots packed with special features. Want to get the hottest casino updates and promotions? Click here to follow us! — https://philosophia.ar/category/sin-categoria/page/5/
Unlocking Casino Bonuses
Bonuses and special offers make online gambling even more enticing. Many platforms offer newcomers fantastic welcome packages, boosting their bankroll instantly. Loyal customers are rewarded with tiered programs, reloading bonuses, and special incentives. While many casino games are based purely on luck, some require skill and strategy. For those who enjoy strategic play, poker offers opportunities to refine skills and increase winning chances. For those who want quick and easy entertainment, luck-based games like slots deliver pure adrenaline.How to Gamble Responsibly Online
While online casinos offer fun and potential winnings, responsible gambling is crucial. By setting strict financial limits and staying disciplined, players can prevent gambling from becoming a problem. Reputable platforms also promote responsible gaming by offering tools like deposit limits, self-exclusion, and links to gambling support organizations. Have you played at an online casino before? What was your experience like? Drop your opinions and stories in the discussion thread!
мостбет вход https://mostbet6032.ru .
Just as American-made cars have an essence, so do Japanese-made vehicles.
Why Online Casinos Are So Popular
The surge in popularity of online casinos is driven by several factors. A key benefit is that online casinos are available anytime, anywhere. Unlike traditional brick-and-mortar casinos, virtual casinos allow you to play whenever it suits you best.
The vast selection of games also contributes to the widespread appeal. Traditional casinos are often limited by space, but online platforms can host thousands of different games. Players can enjoy everything from nostalgic one-armed bandits to modern 3D slots packed with special features. For exclusive deals and insights into the best casinos, check out our social media page! — https://www.dromarvalderrama.com/forum/foro-de-medicina/21-casino-21-euro-bonus-21-casino-deposit-bonus
Bonuses, Rewards, and Promotions
One of the biggest draws of online casinos is the generous promotions and bonuses. Signing up usually comes with exciting perks like extra cash or free slot spins. Regular players can take advantage of loyalty programs, cashback deals, and exclusive VIP rewards. Depending on your preferences, you can choose between pure chance games or those where skill makes a difference. Poker, for instance, is a game of skill where experienced players can outplay beginners by reading opponents and making calculated decisions. For those who want quick and easy entertainment, luck-based games like slots deliver pure adrenaline.Responsible Gambling & Choosing a Safe Casino
As exciting as online gambling can be, it’s essential to practice responsible gaming. By setting strict financial limits and staying disciplined, players can prevent gambling from becoming a problem. Trustworthy sites encourage responsible play through features like voluntary betting caps and time-out options. Do you enjoy online casinos? What are your favorite games and biggest wins? Tell us about your biggest wins or best casino moments!
The Appeal of Online Gambling
More and more players are choosing online gambling for its unmatched convenience and variety. Perhaps the most appealing aspect is how easy it is to access games. Unlike physical casinos that have operating hours, online platforms operate 24/7, letting players enjoy their favorite games at any time.
One of the strongest attractions is the enormous range of gaming options available. Traditional casinos are often limited by space, but online platforms can host thousands of different games. From classic fruit machines to cutting-edge video slots with immersive themes, the choices are practically limitless. For exclusive deals and insights into the best casinos, check out our social media page! — https://www.gelinlikci.com.tr/1win-todo-sobre-el-casino-en-linea-y-sus-oportunidades/
Bonuses, Rewards, and Promotions
Bonuses and special offers make online gambling even more enticing. Signing up usually comes with exciting perks like extra cash or free slot spins. Regular players can take advantage of loyalty programs, cashback deals, and exclusive VIP rewards. Depending on your preferences, you can choose between pure chance games or those where skill makes a difference. Poker, for instance, is a game of skill where experienced players can outplay beginners by reading opponents and making calculated decisions. If you prefer a fast-paced, unpredictable experience, slots and roulette provide thrilling, luck-based gameplay.How to Gamble Responsibly Online
As exciting as online gambling can be, it’s essential to practice responsible gaming. By setting strict financial limits and staying disciplined, players can prevent gambling from becoming a problem. Reputable platforms also promote responsible gaming by offering tools like deposit limits, self-exclusion, and links to gambling support organizations. Are you an online casino enthusiast? What’s your go-to game? Tell us about your biggest wins or best casino moments!
While this doesn’t increase your odds of winning per ticket, it does give you more chances to win as a group.
Here is my web-site :: https://lab.evlic.cn/franciscogcs69
mostbet официальный сайт https://mostbet6031.ru/ .
Hello, the whole thing is going perfectly here and ofcourse every one is sharing information, that’s truly good, keep up writing.
my webpage; https://penzu.com/p/9427cac2
Why Online Casinos Are So Popular
The surge in popularity of online casinos is driven by several factors. One of the biggest advantages is accessibility. Unlike traditional brick-and-mortar casinos, internet-based casinos never close, ensuring round-the-clock entertainment.
The vast selection of games also contributes to the widespread appeal. Physical casinos may offer a few hundred games at best, but digital platforms feature thousands. From classic fruit machines to cutting-edge video slots with immersive themes, the choices are practically limitless. Want to get the hottest casino updates and promotions? Click here to follow us! — https://www.tmr-productions.com/01win-la-plataforma-de-apuestas-y-casino-lider-en-el-mercado/
Bonuses, Rewards, and Promotions
The abundance of promotions is one of the key benefits of playing at online casinos. Signing up usually comes with exciting perks like extra cash or free slot spins. Regular players can take advantage of loyalty programs, cashback deals, and exclusive VIP rewards. Not all casino games are about luck—some demand strategic thinking and expertise. Poker, for instance, is a game of skill where experienced players can outplay beginners by reading opponents and making calculated decisions. For those who want quick and easy entertainment, luck-based games like slots deliver pure adrenaline.Responsible Gambling & Choosing a Safe Casino
To ensure a positive experience, it’s vital to play responsibly and within limits. By setting strict financial limits and staying disciplined, players can prevent gambling from becoming a problem. Licensed casinos provide responsible gambling measures, such as cooling-off periods and withdrawal restrictions, to help players stay in control. Are you an online casino enthusiast? What’s your go-to game? Drop your opinions and stories in the discussion thread!
скачат мостбет скачат мостбет .
Why Online Casinos Are So Popular
There are many reasons why online casinos have gained massive traction. Perhaps the most appealing aspect is how easy it is to access games. Unlike physical casinos that have operating hours, virtual casinos allow you to play whenever it suits you best.
One of the strongest attractions is the enormous range of gaming options available. While land-based venues have space constraints, online casinos provide an endless assortment of games. Whether you love old-school slots or cinematic video games, there’s something for everyone. Want to get the hottest casino updates and promotions? Click here to follow us! — https://asio4allofficial.com/2025/02/18/apuestas-y-casinos-online-eleccion-de-los-jugadores-en-1win/
How Online Casinos Keep Players Engaged
One of the biggest draws of online casinos is the generous promotions and bonuses. Signing up usually comes with exciting perks like extra cash or free slot spins. Loyal customers are rewarded with tiered programs, reloading bonuses, and special incentives. While many casino games are based purely on luck, some require skill and strategy. In games like poker, knowledge and tactics can give players a significant edge over less experienced opponents. On the other hand, slot machines and roulette rely entirely on chance, making them ideal for casual players looking for fun and excitement.Finding a Secure and Fair Casino
As exciting as online gambling can be, it’s essential to practice responsible gaming. By setting strict financial limits and staying disciplined, players can prevent gambling from becoming a problem. Trustworthy sites encourage responsible play through features like voluntary betting caps and time-out options. Have you played at an online casino before? What was your experience like? Drop your opinions and stories in the discussion thread!
Why Online Casinos Are So Popular
There are many reasons why online casinos have gained massive traction. One of the biggest advantages is accessibility. Unlike physical casinos that have operating hours, virtual casinos allow you to play whenever it suits you best.
The vast selection of games also contributes to the widespread appeal. Traditional casinos are often limited by space, but online platforms can host thousands of different games. Players can enjoy everything from nostalgic one-armed bandits to modern 3D slots packed with special features. Stay updated with the latest casino news, exclusive bonuses, and expert tips—follow us here! — https://bkkauction.com/en/1win-casino-y-casa-de-apuestas-todo-lo-que-necesitas-saber/
Bonuses, Rewards, and Promotions
Bonuses and special offers make online gambling even more enticing. Signing up usually comes with exciting perks like extra cash or free slot spins. Regular players can take advantage of loyalty programs, cashback deals, and exclusive VIP rewards. Not all casino games are about luck—some demand strategic thinking and expertise. For those who enjoy strategic play, poker offers opportunities to refine skills and increase winning chances. If you prefer a fast-paced, unpredictable experience, slots and roulette provide thrilling, luck-based gameplay.How to Gamble Responsibly Online
As exciting as online gambling can be, it’s essential to practice responsible gaming. Smart bankroll management and self-control help players maintain a healthy approach to gambling. Licensed casinos provide responsible gambling measures, such as cooling-off periods and withdrawal restrictions, to help players stay in control. Do you enjoy online casinos? What are your favorite games and biggest wins? Share your thoughts and experiences in the comments below!
Lotto America tickets went on sale in 1988, and Powerball tickets followed in 1992.
Feel free to visit my blog post :: https://git.laser.di.unimi.it/francescabreen
Reasons Why Online Casinos Are Booming
The surge in popularity of online casinos is driven by several factors. One of the biggest advantages is accessibility. Unlike physical casinos that have operating hours, internet-based casinos never close, ensuring round-the-clock entertainment.
Another major reason for their popularity is the sheer variety of games. Traditional casinos are often limited by space, but online platforms can host thousands of different games. From classic fruit machines to cutting-edge video slots with immersive themes, the choices are practically limitless. Want to get the hottest casino updates and promotions? Click here to follow us! — https://www.pemadisseny.com/2024/12/10/descubre-la-emocion-sin-limites-con-los-mejores-bonos-y-juegos-en-el-casino-online-1win/
How Online Casinos Keep Players Engaged
The abundance of promotions is one of the key benefits of playing at online casinos. Signing up usually comes with exciting perks like extra cash or free slot spins. Regular players can take advantage of loyalty programs, cashback deals, and exclusive VIP rewards. Not all casino games are about luck—some demand strategic thinking and expertise. In games like poker, knowledge and tactics can give players a significant edge over less experienced opponents. On the other hand, slot machines and roulette rely entirely on chance, making them ideal for casual players looking for fun and excitement.Finding a Secure and Fair Casino
While online casinos offer fun and potential winnings, responsible gambling is crucial. Smart bankroll management and self-control help players maintain a healthy approach to gambling. Licensed casinos provide responsible gambling measures, such as cooling-off periods and withdrawal restrictions, to help players stay in control. Are you an online casino enthusiast? What’s your go-to game? Tell us about your biggest wins or best casino moments!
auto mieten thessaloniki flughafen
There is certainly a lot to find out about this issue.
I really like all of the points you’ve made.
Explore hourly rates for limousine service with flexible options. Luxury travel for events, proms, or corporate needs. Book your reliable limo rental now!
For years, Pin-Up has delivered premium betting, casino thrills, and the pinup app for seamless online gaming worldwide pin up casino mirror
1wi https://1win6008.ru/ .
Baltour — блог о путешествиях с характером. Исследуем города, природу, маршруты и неожиданные места — по Балтике и не только. Без шаблонов, с душой и реальными впечатлениями https://baltour.ru/
ТОП-10 лучших сервисов для WhatsApp-рассылки WhatsApp является одним из самых популярных мессенджеров в мире, с миллиардами активных пользователей https://marketing-i.ru/
Outstanding post however , I was wanting to know if you could write a litte more
on this subject? I’d be very grateful if you could elaborate a little
bit more. Thank you!
my web blog https://honey5.testedhoneypot.com/find-best-moving-company-index-1459.html
Wow, amazing blog layout! How long have you been blogging for?
you make blogging look easy. The overall look of your site is magnificent, as well as
the content!
It’s really a nice and helpful piece of information. I
am satisfied that you shared this helpful information with us.
Please stay us up to date like this. Thank you for sharing.
Hmm it appears like your website ate my first comment
(it was super long) so I guess I’ll just sum it up what I wrote and say, I’m thoroughly enjoying your
blog. I too am an aspiring blog blogger but I’m still new to everything.
Do you have any helpful hints for novice blog writers?
I’d definitely appreciate it.
1vin 1win6045.ru .
Really many of beneficial tips.
Погружайтесь в мир интересных находок в нашем магазине. Мы предлагаем лучшие предложения для максимального удовольствия по https://xn--kr35-rzb.com
мотбет https://mostbet5002.ru .
1win site https://www.1win16.com.ng .
Why Online Casinos Are So Popular
More and more players are choosing online gambling for its unmatched convenience and variety. One of the biggest advantages is accessibility. While land-based casinos have restrictions, online platforms operate 24/7, letting players enjoy their favorite games at any time.
The vast selection of games also contributes to the widespread appeal. While land-based venues have space constraints, online casinos provide an endless assortment of games. Whether you love old-school slots or cinematic video games, there’s something for everyone. For exclusive deals and insights into the best casinos, check out our social media page! — https://immediatehealthstaffing.com/1win-el-mejor-casino-y-casa-de-apuestas-en-linea/
Unlocking Casino Bonuses
The abundance of promotions is one of the key benefits of playing at online casinos. Many platforms offer newcomers fantastic welcome packages, boosting their bankroll instantly. Regular players can take advantage of loyalty programs, cashback deals, and exclusive VIP rewards. While many casino games are based purely on luck, some require skill and strategy. For those who enjoy strategic play, poker offers opportunities to refine skills and increase winning chances. On the other hand, slot machines and roulette rely entirely on chance, making them ideal for casual players looking for fun and excitement.How to Gamble Responsibly Online
As exciting as online gambling can be, it’s essential to practice responsible gaming. Smart bankroll management and self-control help players maintain a healthy approach to gambling. Licensed casinos provide responsible gambling measures, such as cooling-off periods and withdrawal restrictions, to help players stay in control. Do you enjoy online casinos? What are your favorite games and biggest wins? Share your thoughts and experiences in the comments below!
Why Online Casinos Are So Popular
The surge in popularity of online casinos is driven by several factors. A key benefit is that online casinos are available anytime, anywhere. While land-based casinos have restrictions, virtual casinos allow you to play whenever it suits you best.
Another major reason for their popularity is the sheer variety of games. Physical casinos may offer a few hundred games at best, but digital platforms feature thousands. Whether you love old-school slots or cinematic video games, there’s something for everyone. For exclusive deals and insights into the best casinos, check out our social media page! — http://multiconexoes.ind.br/author/multiconadm/page/20/
How Online Casinos Keep Players Engaged
One of the biggest draws of online casinos is the generous promotions and bonuses. New players are often welcomed with attractive sign-up bonuses, deposit matches, and free spins. Loyal customers are rewarded with tiered programs, reloading bonuses, and special incentives. Depending on your preferences, you can choose between pure chance games or those where skill makes a difference. In games like poker, knowledge and tactics can give players a significant edge over less experienced opponents. For those who want quick and easy entertainment, luck-based games like slots deliver pure adrenaline.How to Gamble Responsibly Online
As exciting as online gambling can be, it’s essential to practice responsible gaming. Smart bankroll management and self-control help players maintain a healthy approach to gambling. Trustworthy sites encourage responsible play through features like voluntary betting caps and time-out options. Do you enjoy online casinos? What are your favorite games and biggest wins? Share your thoughts and experiences in the comments below!
The Appeal of Online Gambling
There are many reasons why online casinos have gained massive traction. Perhaps the most appealing aspect is how easy it is to access games. Unlike traditional brick-and-mortar casinos, online platforms operate 24/7, letting players enjoy their favorite games at any time.
The vast selection of games also contributes to the widespread appeal. While land-based venues have space constraints, online casinos provide an endless assortment of games. From classic fruit machines to cutting-edge video slots with immersive themes, the choices are practically limitless. Want to get the hottest casino updates and promotions? Click here to follow us! — https://christianandjoan-thewedding.com/apuestas-y-casinos-online-1win-eleccion-de-los-jugadores/
Unlocking Casino Bonuses
The abundance of promotions is one of the key benefits of playing at online casinos. New players are often welcomed with attractive sign-up bonuses, deposit matches, and free spins. Regular players can take advantage of loyalty programs, cashback deals, and exclusive VIP rewards. Not all casino games are about luck—some demand strategic thinking and expertise. In games like poker, knowledge and tactics can give players a significant edge over less experienced opponents. If you prefer a fast-paced, unpredictable experience, slots and roulette provide thrilling, luck-based gameplay.Finding a Secure and Fair Casino
As exciting as online gambling can be, it’s essential to practice responsible gaming. Setting personal limits, managing your budget wisely, and avoiding chasing losses are key to enjoying online casinos safely. Reputable platforms also promote responsible gaming by offering tools like deposit limits, self-exclusion, and links to gambling support organizations. Do you enjoy online casinos? What are your favorite games and biggest wins? Tell us about your biggest wins or best casino moments!
1win https://www.1win5030.ru .
mostbet скачать mostbet скачать .
Fantastic post however I was wanting to know if you could write a litte more on this subject?
I’d be very grateful if you could elaborate a
little bit further. Many thanks!
Hacksaw Gaming’s Rad Maxx sets its cat-versus-mouse clash on a 5×5 grid, distinguished by its capacity for omnidirectional payouts.
Here is my homepage — http://jcorporation.kr/g5/bbs/board.php?bo_table=free&wr_id=1185244
Thank you, Plenty of material!
1win. com https://1win7004.ru .
Excellent post! Press releases are key for crafting media messages and communicating crucial updates.
They support forge links between companies and journalists.
Writing effective press releases requires being concise, relevant with the interests
of chosen media platforms. With the rise of digital media, press releases further play a
important role in digital public relations.
They merely reach classic news outlets but also increase traffic and improve a company’s digital presence.
Adding images, such as photos, can enhance press releases significantly engaging and accessible.
Evolving to the changing Media news — Heidi —
sphere while upholding core values can greatly enhance a press release’s reach.
What’s your take on using multimedia in media
statements?
мосбет казино http://mostbet7001.ru/ .
I’m really loving the theme/design of your website.
Do you ever run into any browser compatibility problems?
A handful of my blog audience have complained about my
site not working correctly in Explorer but looks great in Firefox.
Do you have any advice to help fix this problem?
my site https://honey5.testedhoneypot.com/find-best-moving-company-index-1493.html
1win metode de plată https://1win5027.ru/ .
1win.com.ci 1win5026.ru .
1win,com 1win,com .
how to bet on 1win http://1win18.com.ng/ .
What a stuff of un-ambiguity and preserveness of valuable know-how regarding unpredicted emotions.
поддержка мостбет https://www.mostbet7003.ru .
мостбет скачать бесплатно мостбет скачать бесплатно .
1win com https://1win7006.ru .
mostbets https://1win5028.ru .
After checking out a number of the articles on your web site,
I seriously like your technique of writing a blog. I saved as a favorite it to my bookmark webpage list
and will be checking back in the near future. Please visit my web
site as well and tell me how you feel.
баланс ван вин https://1win7018.ru .
A crosslink is a physical or chemical bond that connects the functional groups of a polymer chain to another one through covalent bonding or supramolecular TELEGRAM @SEO_ANOMALY – SEO BACKLINKS, BLACK-LINKS, TRAFFIC BOOST, LINK INDEXING
Backlinks, or inbound links, are hyperlinks from one website to another. They signal trust, showing that one site values another’s content. Search engines like SEO BACKLINKS, CROSS-LINKS, HACKED WP-ADMIN — TELEGRAM @SEO_ANOMALY
Are https://cupa.co.ke/best-online-crypto-casinos-top-sites-for-safe-fast-19/ offshore safe?
we love, something is provided by reliable security protocols, and different options, including
payments through the use of cryptocurrencies.
This exclusive 1xBet promo code sets new players up for success, whether betting on a thrilling Champions League match or spinning vibrant slots in the casino http://hotel-golebiewski.phorum.pl/viewtopic.php?p=560812#560812
1xCasino welcome bonus is a package active across your first four deposits. New customers will claim up to €2205/$2420 1xcasino bonus
1вин официальный http://1win7007.ru/ .
купить аккаунт с прокачкой marketplace-akkauntov-top.ru
1win live 1win7009.ru .
I’m extremely impressed with your writing skills and also with the layout on your weblog.
Is this a paid theme or did you modify it yourself?
Either way keep up the nice quality writing, it’s rare to see
a great blog like this one today.
мостбет скачать бесплатно http://www.mostbet5009.ru .
Pragmatic Play Gates Of Olympus Oyununda Büyük Kayıplar Yaşıyorum!
slot dede oyunu, Pragmatic Play tarafından sunulan eğlenceli bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, mitolojik bir temaya sahiptir. Zeus’un dünyasına giriş yaparak büyük kazançlar elde edebilirsiniz.
Gates of Olympus demo oyna seçeneği ile stratejinizi oluşturmadan önce deneyim kazanabilirsiniz.
Gates of Olympus oyna demo modunda, oyunun heyecan verici mekaniklerini ve dinamik yapısını keşfedebilirsiniz. Oyunun ana özellikleri arasında çeşitli bonuslar ve yüksek kazanç fırsatları yer alır. Gates of Olympus ile eğlencenin ve kazancın kapılarını aralayın!
Pragmatic Play Gates Of Olympus Oyununda Büyük Kayıplar Yaşıyorum!
slot dede oyunu, Pragmatic Play tarafından sunulan sürükleyici bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, efsanevi bir temaya sahiptir. Bu oyun, Zeus’un krallığına adım atma fırsatı sunar.
Gates of Olympus demo oyna seçeneği ile oyunun temposunu ve özelliklerini önceden deneyimleyebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun yüksek volatilitesi ve çarpıcı grafikleriyle tanışabilirsiniz. Oyunun ana özellikleri arasında dinamik ödeme sistemi ve büyük ödüller bulunur. Gates of Olympus ile büyük kazanç fırsatlarını değerlendirin!
мрстбет https://www.mostbet5010.ru .
Gates Of Olympus ile büyük kayıplar mı veriyorsunuz?
dede kumar oyunu, Pragmatic Play tarafından sunulan heyecan dolu bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, tanrısal bir temaya sahiptir. Bu oyun, Zeus’un krallığına adım atma fırsatı sunar.
Gates of Olympus demo oyna seçeneği ile stratejinizi oluşturmadan önce deneyim kazanabilirsiniz.
Gates of Olympus oyna demo modunda, oyunun yüksek volatilitesi ve çarpıcı grafikleriyle tanışabilirsiniz. Oyunun ana özellikleri arasında çeşitli bonuslar ve yüksek kazanç fırsatları yer alır. Gates of Olympus ile şansınızı deneyin ve büyük ödüllere ulaşın!
Good post. I learn something new and challenging on sites I stumbleupon every day.It will always be helpful to read through articles from other authors and use a little something from their web sites.Stop by my web site Comfortable travel clothes
Pragmatic Play Gates Of Olympus Oyununda Büyük Kayıplar Yaşıyorum!
gates of olympus oyna, Pragmatic Play tarafından sunulan eğlenceli bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, tanrısal bir temaya sahiptir. Bu oyun, Zeus’un krallığına adım atma fırsatı sunar.
Gates of Olympus demo oyna seçeneği ile oyunun temposunu ve özelliklerini önceden deneyimleyebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun yüksek volatilitesi ve çarpıcı grafikleriyle tanışabilirsiniz. Oyunun ana özellikleri arasında çeşitli bonuslar ve yüksek kazanç fırsatları yer alır. Gates of Olympus ile şansınızı deneyin ve büyük ödüllere ulaşın!
Gates Of Olympus ile büyük kayıplar mı veriyorsunuz?
dede demo oyna, Pragmatic Play tarafından sunulan heyecan dolu bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, mitolojik bir temaya sahiptir. Zeus’un dünyasına giriş yaparak büyük kazançlar elde edebilirsiniz.
Gates of Olympus demo oyna seçeneği ile stratejinizi oluşturmadan önce deneyim kazanabilirsiniz.
Gates of Olympus oyna demo modunda, oyunun farklı özelliklerini ve kazanç sistemini deneyimleyebilirsiniz. Oyunun ana özellikleri arasında dinamik ödeme sistemi ve büyük ödüller bulunur. Gates of Olympus ile büyük kazanç fırsatlarını değerlendirin!
I for all time emailed this weblog post page to all my contacts, for the reason that if like to read it afterward my friends will too.My site … airline forum (Sal)
1вин бет официальный сайт http://1win7012.ru .
Pragmatic Play Gates Of Olympus Oyununda Büyük Kayıplar Yaşıyorum!
slot dede oyunu, Pragmatic Play tarafından sunulan heyecan dolu bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, tanrısal bir temaya sahiptir. Oyun, Zeus’un büyüleyici dünyasında eşsiz bir macera sunuyor.
Gates of Olympus demo oyna seçeneği ile oyunun nasıl işlediğini öğrenebilir ve kendinizi geliştirebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun heyecan verici mekaniklerini ve dinamik yapısını keşfedebilirsiniz. Oyunun ana özellikleri arasında çeşitli bonuslar ve yüksek kazanç fırsatları yer alır. Gates of Olympus ile eğlencenin ve kazancın kapılarını aralayın!
Gates Of Olympus ile büyük kayıplar mı veriyorsunuz?
dede oyunu, Pragmatic Play tarafından sunulan eğlenceli bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, efsanevi bir temaya sahiptir. Zeus’un dünyasına giriş yaparak büyük kazançlar elde edebilirsiniz.
Gates of Olympus demo oyna seçeneği ile oyunun temposunu ve özelliklerini önceden deneyimleyebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun yüksek volatilitesi ve çarpıcı grafikleriyle tanışabilirsiniz. Oyunun ana özellikleri arasında çeşitli bonuslar ve yüksek kazanç fırsatları yer alır. Gates of Olympus ile büyük kazanç fırsatlarını değerlendirin!
After exploring a few of the blog posts on your website, I honestly like your technique of blogging.
I saved as a favorite it to my bookmark webpage list and will
be checking back in the near future. Please check out my website too and let me know how you feel.
Устали от досадных уборок и вездесущей пыли? Наша компания в Санкт-Петербурге предлагает качественные услуги по уборке как и деловых помещений. Мы заботимся о вашем времени, применяя только безопасные и действенные средства. Наша команда профессионалов подарит вашему дому или офису чистоту и организованностью, а вам — уверенность и спокойствие. Двигайтесь к Уборка после ремонта квартиры клининговой компанией цены Вверьте наведение порядка нам и наслаждайтесь временем, проведенным с семьей и приятелями! Запишитесь на безвозмездную консультацию прямо сейчас и получите бонусные предложения для вновь прибывших клиентов. Наведение чистоты — это не просто работа, это наше предназначение!
I know this if off topic but I’m looking into starting my own weblog and was wondering what all
is required to get set up? I’m assuming having a blog like yours would cost a pretty penny?
I’m not very internet savvy so I’m not 100% sure.
Any suggestions or advice would be greatly appreciated. Thanks
Ищете надежную помощь в наведении порядка вашей в Санкт-Петербурге? Наша группа профессионалов дает гарантию чистоту и и порядок в вашем доме! Мы используем только безопасные для здоровья и эффективные средства, чтобы вы могли вкушать свежестью без хлопот. Нажимайте https://chisto-v-srok.ru
мостбет мобильная версия скачать https://mostbet7007.ru/ .
Pragmatic Play Gates Of Olympus Oyununda Büyük Kayıplar Yaşıyorum!
gates of olympus oyna, Pragmatic Play tarafından sunulan eğlenceli bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, tanrısal bir temaya sahiptir. Bu oyun, Zeus’un krallığına adım atma fırsatı sunar.
Gates of Olympus demo oyna seçeneği ile oyunun temposunu ve özelliklerini önceden deneyimleyebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun heyecan verici mekaniklerini ve dinamik yapısını keşfedebilirsiniz. Oyunun ana özellikleri arasında çok sayıda ücretsiz dönüş ve yüksek kazanç potansiyeli bulunur. Gates of Olympus ile eğlencenin ve kazancın kapılarını aralayın!
?Hola entusiastas del juego
Empieza a jugar sin preocuparte por cuГЎnto debes ingresar.
Las casas de apuestas online en EspaГ±a sin licencia local ofrecen juegos innovadores y apuestas deportivas sin lГmite. Es una alternativa real para quienes buscan libertad total.
Apuestas deportivas legales vs. sin licencia: comparativa — http://casasdeapuestassinlicenciaespana.xyz/
?Que tengas excelentes botes acumulados!
мостбет скачать бесплатно http://mostbet7006.ru .
Gates Of Olympus ile büyük kayıplar mı veriyorsunuz?
dede demo oyna, Pragmatic Play tarafından sunulan eğlenceli bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, tanrısal bir temaya sahiptir. Bu oyun, Zeus’un krallığına adım atma fırsatı sunar.
Gates of Olympus demo oyna seçeneği ile oyunun temposunu ve özelliklerini önceden deneyimleyebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun yüksek volatilitesi ve çarpıcı grafikleriyle tanışabilirsiniz. Oyunun ana özellikleri arasında çeşitli bonuslar ve yüksek kazanç fırsatları yer alır. Gates of Olympus ile şansınızı deneyin ve büyük ödüllere ulaşın!
Gates Of Olympus ile büyük kayıplar mı veriyorsunuz?
dede oyunu kumar, Pragmatic Play tarafından sunulan sürükleyici bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, efsanevi bir temaya sahiptir. Zeus’un dünyasına giriş yaparak büyük kazançlar elde edebilirsiniz.
Gates of Olympus demo oyna seçeneği ile oyunun nasıl işlediğini öğrenebilir ve kendinizi geliştirebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun heyecan verici mekaniklerini ve dinamik yapısını keşfedebilirsiniz. Oyunun ana özellikleri arasında dinamik ödeme sistemi ve büyük ödüller bulunur. Gates of Olympus ile eğlencenin ve kazancın kapılarını aralayın!
мостбет промокод мостбет промокод .
Nice post. I was checking constantly this weblog
and I’m impressed! Extremely useful info specifically the final section 🙂 I maintain such information a lot.
I used to be seeking this certain info for a very lengthy time.
Thank you and good luck.
Hello are using WordPress for your site platform? I’m
new to the blog world but I’m trying to get started and set up my own. Do you require any coding knowledge
to make your own blog? Any help would be really appreciated!
Pragmatic Play Gates Of Olympus Oyununda Büyük Kayıplar Yaşıyorum!
gates of olympus, Pragmatic Play tarafından sunulan sürükleyici bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, efsanevi bir temaya sahiptir. Oyun, Zeus’un büyüleyici dünyasında eşsiz bir macera sunuyor.
Gates of Olympus demo oyna seçeneği ile oyunun nasıl işlediğini öğrenebilir ve kendinizi geliştirebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun farklı özelliklerini ve kazanç sistemini deneyimleyebilirsiniz. Oyunun ana özellikleri arasında çok sayıda ücretsiz dönüş ve yüksek kazanç potansiyeli bulunur. Gates of Olympus ile şansınızı deneyin ve büyük ödüllere ulaşın!
Gates of Olympus oyununda kayıplar yaşıyorum!
gates of olympus, Pragmatic Play tarafından sunulan sürükleyici bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, tanrısal bir temaya sahiptir. Oyun, Zeus’un büyüleyici dünyasında eşsiz bir macera sunuyor.
Gates of Olympus demo oyna seçeneği ile stratejinizi oluşturmadan önce deneyim kazanabilirsiniz.
Gates of Olympus oyna demo modunda, oyunun yüksek volatilitesi ve çarpıcı grafikleriyle tanışabilirsiniz. Oyunun ana özellikleri arasında çeşitli bonuslar ve yüksek kazanç fırsatları yer alır. Gates of Olympus ile eğlencenin ve kazancın kapılarını aralayın!
Gates of Olympus oyununda kayıplar yaşıyorum!
dede oyunu kumar, Pragmatic Play tarafından sunulan heyecan dolu bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, mitolojik bir temaya sahiptir. Zeus’un dünyasına giriş yaparak büyük kazançlar elde edebilirsiniz.
Gates of Olympus demo oyna seçeneği ile stratejinizi oluşturmadan önce deneyim kazanabilirsiniz.
Gates of Olympus oyna demo modunda, oyunun farklı özelliklerini ve kazanç sistemini deneyimleyebilirsiniz. Oyunun ana özellikleri arasında çok sayıda ücretsiz dönüş ve yüksek kazanç potansiyeli bulunur. Gates of Olympus ile şansınızı deneyin ve büyük ödüllere ulaşın!
Thanks to my father who stated to me concerning this weblog, this webpage is in fact awesome.
скачать казино мостбет mostbet6041.ru .
Gates Of Olympus ile büyük kayıplar mı veriyorsunuz?
slot dede oyunu, Pragmatic Play tarafından sunulan heyecan dolu bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, tanrısal bir temaya sahiptir. Oyun, Zeus’un büyüleyici dünyasında eşsiz bir macera sunuyor.
Gates of Olympus demo oyna seçeneği ile oyunun nasıl işlediğini öğrenebilir ve kendinizi geliştirebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun heyecan verici mekaniklerini ve dinamik yapısını keşfedebilirsiniz. Oyunun ana özellikleri arasında dinamik ödeme sistemi ve büyük ödüller bulunur. Gates of Olympus ile eğlencenin ve kazancın kapılarını aralayın!
Hi, Neat post. There’s a problem together with your website in internet explorer, would check
this? IE still is the market chief and a large element of other people will leave out your fantastic writing due to this problem.
Gates Of Olympus ile büyük kayıplar mı veriyorsunuz?
dede demo oyna, Pragmatic Play tarafından sunulan eğlenceli bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, efsanevi bir temaya sahiptir. Zeus’un dünyasına giriş yaparak büyük kazançlar elde edebilirsiniz.
Gates of Olympus demo oyna seçeneği ile oyunun temposunu ve özelliklerini önceden deneyimleyebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun farklı özelliklerini ve kazanç sistemini deneyimleyebilirsiniz. Oyunun ana özellikleri arasında dinamik ödeme sistemi ve büyük ödüller bulunur. Gates of Olympus ile eğlencenin ve kazancın kapılarını aralayın!
ставки на мостбет http://www.mostbet6042.ru .
Gates of Olympus oyununda kayıplar yaşıyorum!
dede oyunu para kazanma, Pragmatic Play tarafından sunulan heyecan dolu bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, efsanevi bir temaya sahiptir. Zeus’un dünyasına giriş yaparak büyük kazançlar elde edebilirsiniz.
Gates of Olympus demo oyna seçeneği ile stratejinizi oluşturmadan önce deneyim kazanabilirsiniz.
Gates of Olympus oyna demo modunda, oyunun yüksek volatilitesi ve çarpıcı grafikleriyle tanışabilirsiniz. Oyunun ana özellikleri arasında çeşitli bonuslar ve yüksek kazanç fırsatları yer alır. Gates of Olympus ile eğlencenin ve kazancın kapılarını aralayın!
Pragmatic Play Gates Of Olympus Oyununda Büyük Kayıplar Yaşıyorum!
gates of olympus oyna, Pragmatic Play tarafından sunulan sürükleyici bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, tanrısal bir temaya sahiptir. Zeus’un dünyasına giriş yaparak büyük kazançlar elde edebilirsiniz.
Gates of Olympus demo oyna seçeneği ile oyunun nasıl işlediğini öğrenebilir ve kendinizi geliştirebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun farklı özelliklerini ve kazanç sistemini deneyimleyebilirsiniz. Oyunun ana özellikleri arasında çok sayıda ücretsiz dönüş ve yüksek kazanç potansiyeli bulunur. Gates of Olympus ile eğlencenin ve kazancın kapılarını aralayın!
1win md https://1win707.ru .
Gates of Olympus oyununda kayıplar yaşıyorum!
gates of olympus, Pragmatic Play tarafından sunulan heyecan dolu bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, mitolojik bir temaya sahiptir. Oyun, Zeus’un büyüleyici dünyasında eşsiz bir macera sunuyor.
Gates of Olympus demo oyna seçeneği ile oyunun nasıl işlediğini öğrenebilir ve kendinizi geliştirebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun heyecan verici mekaniklerini ve dinamik yapısını keşfedebilirsiniz. Oyunun ana özellikleri arasında dinamik ödeme sistemi ve büyük ödüller bulunur. Gates of Olympus ile şansınızı deneyin ve büyük ödüllere ulaşın!
Hey very nice blog!
wonderful issues altogether, you simply won a brand new reader.
What could you recommend in regards to your put up that you made a few days ago?
Any certain?
Gates of Olympus oyununda kayıplar yaşıyorum!
gate of olympus oyna, Pragmatic Play tarafından sunulan sürükleyici bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, mitolojik bir temaya sahiptir. Oyun, Zeus’un büyüleyici dünyasında eşsiz bir macera sunuyor.
Gates of Olympus demo oyna seçeneği ile oyunun nasıl işlediğini öğrenebilir ve kendinizi geliştirebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun heyecan verici mekaniklerini ve dinamik yapısını keşfedebilirsiniz. Oyunun ana özellikleri arasında dinamik ödeme sistemi ve büyük ödüller bulunur. Gates of Olympus ile şansınızı deneyin ve büyük ödüllere ulaşın!
Do you mind if I quote a couple of your posts as long as I provide credit and sources back to your site?
My blog is in the very same niche as yours and my visitors would definitely benefit from some
of the information you provide here. Please let me know if this okay with you.
Appreciate it!
казино 1win отзывы 1win8003.ru .
You actually reported this terrifically!
Pragmatic Play Gates Of Olympus Oyununda Büyük Kayıplar Yaşıyorum!
dede oyunu para kazanma, Pragmatic Play tarafından sunulan heyecan dolu bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, efsanevi bir temaya sahiptir. Oyun, Zeus’un büyüleyici dünyasında eşsiz bir macera sunuyor.
Gates of Olympus demo oyna seçeneği ile oyunun nasıl işlediğini öğrenebilir ve kendinizi geliştirebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun heyecan verici mekaniklerini ve dinamik yapısını keşfedebilirsiniz. Oyunun ana özellikleri arasında çok sayıda ücretsiz dönüş ve yüksek kazanç potansiyeli bulunur. Gates of Olympus ile büyük kazanç fırsatlarını değerlendirin!
игра авиатор 1win https://www.1win8005.ru .
Además, tenía una genética excepcionalmente favorable para el culturismo. El uso de esteroides anabólicos ha sido un tema polémico en la cultura del culturismo durante décadas. Ha llevado a debates sobre deportividad, integridad y seguridad para la salud de los atletas.
Los esteroides anabólicos son androgénicos y mejoran las características masculinas como el vello corporal, los músculos y los genitales masculinos, y obtienen una voz más profunda. En la época en la que Schwarzenegger competía, los esteroides no estaban prohibidos, por lo tanto su uso no period ilegal. Con el tiempo Arnold no sólo reconoció su uso, sino que contó qué drogas utilizaba.
«Se ha probado que si tomas esteroides y no entrenas, no vas a hacer que tu cuerpo se agrande», defendía. En un principio se criticó que Hardy hubiese usado los esteroides para aumentar el tamaño de su musculado cuerpo, pero el actor ha negado rotundamente esta práctica. El intérprete es conocido por entrenar sin descanso cuando tiene que prepararse para un papel. Gracias a que antes de esta película Bale se encontraba en plena forma, su memoria muscular, seis días en el gimnasio a la semana y una dieta estricta, consiguieron recuperar su tonificado cuerpo. Rourke fue boxeador en su juventud, pero cuando le llegó la oportunidad de protagonizar ‘El luchador, su forma física estaba de capa caída.
Su amigo Joe Weider le dejaba publicar anuncios en sus múltiples revistas de health y fisicoculturismo. Luego con un poco más de dinero se aventuró en la venta de suplementos nutricionales. Las ganancias procedentes del fisicoculturismo no eran tan representativas como en la actualidad. Por tal motivo, decidió emprender un negocio de reformas y restauraciones inmobiliarias en conjunto con su amigo el fisicoculturista italiano Franco Columbu. Su victoria en 1980 lo consagró como campeón indiscutible del evento y junto con dicho evento informó su retiro definitivo de las competencias profesionales de fisicoculturismo. El esfuerzo y los entrenamientos ya eran palpables en el físico de Arnold, y como prometió en el evento anterior volvió para ganar.
En 1984, durante el rodaje de Purple Sonja y estando ya comprometido con Maria Shriver, Arnold también tuvo un tórrido y breve romance de dos semanas con la actriz y modelo Brigitte Nielsen. Sin embargo, Arnold explica en su autobiografía que la relación había terminado, hasta que Gitte (así es como era apodada artísticamente Brigitte Nielsen) se reencontró con él en Los Ángeles para decirle que quería una relación estable. En 2014 protagonizó la película Maggie con la actriz nominada al premio Óscar Abigail Breslin. La película obtuvo críticas mixtas pero la actuación dramática de Schwarzenegger obtuvo buenas críticas al interpretar a un padre que lucha desesperadamente para conservar sus últimos momentos con su hija que se está convirtiendo en un Zombi. Volvió al cine con The Expendables 2, estrenada el 17 de agosto de 2012, junto a otras estrellas como Bruce Willis y Sylvester Stallone.
Un papel de superhéroe era el indicado y el mismo llegó de la mano del productor Dino De Laurentiis, el cual se interesó en el cuerpo musculoso de Schwarzenegger para hacer el personaje de un bárbaro que busca venganza por la muerte de sus padres. La película que lo llevó a la cima de la fama fue Conan el Bárbaro (1982), una cinta que contaba con un estilo épico in style en la época y que resultó un gran éxito en taquilla. Cabe destacar que Arnold llegó a amasar una pequeña fortuna antes de lograr el éxito en el mundo del cine. No fue hasta 2007 donde, acorralada por la justicia debió confesar.
Este documental con tintes de drama se ha convertido en una cinta de culto para los amantes del fisicoculturismo y acondicionamiento deportivo. Schwarzenegger en la década del 70 mantenía medidas asombrosas que le hicieron ganar 7 títulos Mister Olympia. En el pecho solía medir 145 cm, sus brazos tenían una circunferencia de fifty six cm, sus muslos seventy three cm y sus pantorrillas fifty one cm. En conjunto con el Mister Olympia son las dos competencias que todo culturista desea ganar para consagrarse.
En los libros biográficos de ambos se puede apreciar que la relación terminó por la vida easy y hogareña que Barbara deseaba llevar, en cambio, Arnold aspiraba mucho, sus sueños eran grandes. Durante este período le ofrecieron algunos papeles como actor en el cine, situación que lo obligó a retirarse por un tiempo del mundo de las pesas. Arnold nunca detuvo sus entrenamientos y poco tiempo antes de celebrarse el Mister Olympia de 1980 sorprendió a todos con su anuncio de que participaría nuevamente. Schwarzenegger ganó su primer Mister Olympia en el año 1970, con los resultados del año anterior y su gran evolución física se presentó como uno de los grandes favoritos para ganar el evento.
Sin embargo, su éxito no estuvo exento de controversia y especulación sobre el uso de esteroides anabólicos para mejorar su rendimiento. El uso de drogas para mejorar el rendimiento, especialmente esteroides anabólicos androgénicos, es común por parte de diferentes atletas, siendo el culturismo donde más personas lo consumen. Diferentes estudios muestran que hasta el sixty three,5% de culturistas encuestados, ya sean profesionales o no, lo consumen. La historia de Arnold Schwarzenegger es un ejemplo inspirador de determinación y éxito en el mundo del culturismo. Desde sus humildes comienzos en Austria hasta convertirse en una leyenda del deporte, su legado perdura hasta el día de hoy. Con un récord de 7 títulos de Mr. Olympia y una carrera exitosa en el cine, Schwarzenegger ha dejado una huella imborrable en la historia del culturismo, demostrando que la dedicación y la disciplina pueden llevar a la grandeza. Su impacto histórico es innegable, ya que ha inspirado a innumerables personas a seguir sus pasos, con un aumento del 30% en la participación en competiciones de culturismo en los últimos años.
Uno de los galanes más guapos de Hollywood vio como su carrera se vino abajo por el uso de drogas, exceso de operaciones estéticas y como no, esteroides. «Uno de los primeros en traer esteroides a Estados Unidos fue Arnold Schwarzenegger», dice el famoso exculturista Sergio Oliva, ‘El Mito’. La declaración que más llamó la atención de Pumping Iron es la que asimila lo que él hace con un orgasmo. «Hay algo que nosotros llamamos Pump, es el momento en que la sangre irriga el músculo, la sentís correr por tu cuerpo y hace que el músculo crezca y parezca que va a reventar la piel.
Lo hace junto a su entrenador personal (P-Nut Monroe), quien realiza ejercicios cortos e intensos cuatro veces al día. Todo esto mezclado con grandes dosis de proteína y elevados pesos. Por ello, Hardy ha conseguido unos bíceps de forty cm, un pecho de 114 cm y una cintura de 86 cm.
References:
what is the best steroid for cutting (https://thecareerguard.com/employer/clenbuterol-para-mujeres/)
En 2016, Wealthy Piana declaró abiertamente que consumía esteroides porque «solo te dañas a ti mismo»y opinó que, si alguien desea convertirse en culturista profesional, «no tendrá otra opción». En un video de YouTube que publicó el año pasado, Piana dijo que tomó esteroides durante 27 años y aconsejó a sus seguidores que no realicen esta práctica. Me siento tan triste y me rompe el corazón que no haya conseguido salir adelante. Realmente tocó el corazón de muchas personas y ayudó a tantos» comentó. Pero enfatizó que no hay evidencia de los resultados que sugieran que las drogas jugaron un papel en el fallecimiento de Piana. La mañana de este viernes (25) se confirmó la muerte del famoso fisiculturista Wealthy Piana.
Su novia Chanel Jansen dio aviso a la policía luego de encontrarlo inconsciente en el piso de su mansión de Florida. En el lugar había al menos 20 botellas de esteroides, a los cuales el deportista confesó ser adicto desde los 18 años e invertir miles de dólares en su compra al mes. El diario The Sun ha informado en las últimas horas que Rich Piana permanece hospitalizado en pronóstico grave y en coma inducido después de que su novia lo encontrase inconsciente y tras haber sufrido un golpe en la cabeza en su domicilio. Empezó a mostrar sus exagerados músculos y sus entrenamientos a través de esta red social, y ha alcanzado la increíble cifra de 1,2 millones de seguidores.
Su obsesión con su cuerpo es tan grande, que se ha vuelto un hambriento de los esteroides. Esto ha hecho que sus colegas del fisicoculturismo graben movies para intentar convencerlo de que se detenga. El personal médico cuando llegó a la residencia de la víctima encontró 20 envases de esteroides y vio que en una mesa había un polvo blanco, una tarjeta de crédito y una pajita. Según informa TMZ, Piana se desmayó el 10 de agosto en su hogar en Florida mientras su precise pareja, Chanel Jansen, le estaba cortando el pelo. Los intentos por reanimarlo no dieron resultado y fue trasladado de urgencia a un hospital cercano. El fallecimiento de Piana sirve como advertencia de los peligros del uso de esteroides y enfatiza una vez más lo essential que es ser transparente y estar bien informado sobre las prácticas de culturismo.
Solo quiero decir GRACIAS Rich, por enseñarme tanto sobre la vida, aunque fuera de una manera fácil o dura. Tuvimos nuestros altibajos, pero seguro que vivimos un tiempo maravilloso en la presencia del otro, nosotros luchando a través de algunos tiempos oscuros juntos. El pasado 10 de agosto, mientras estaba en su casa en Florida, el musculoso hombre de forty six años se desplomó en el baño, mientras su novia, Chanel Jansen, intentaba detenerlo, pero debido a su gigantesco tamaño no fue posible. En uno de sus movies defendió el uso de esteroides de una manera bastante particular.
Su novia Chanel Jansen avisó inmediatamente a emergencias y una vez hospitalizado los médicos le indujeron en coma. Por el momento no se han revelado las causas de su fallecimiento, pero se habla de una posible sobredosis de esteroides, que Piana consumió durante 27 años. Con eleven años comenzó a pasearse por el gimnasio hasta que a los 15 llegó a competir. La frustración de no poder conseguir los primeros puestos, lo llevó a tomar la decisión de empezar a consumir anabólicos.
Si bien ya no participa a nivel profesional, continúa forzando su cuerpo al extremo, y trabaja en diferentes eventos comercializando los suplementos de su propia línea. De acuerdo a un artículo publicado por el periódico británico The Daily Mail, Piana es hijo de una fisicoculturista de L A, California, y comenzó a interesarse en el tema luego de verla en una competencia. Empezó a entrenar cuando tenía recién eleven años, y a los 15 ya estaba participando en torneos oficiales. «Necesitas estar atento, educado y desear hacer cualquier cosa que te mantenga sano y que preserve tu cuerpo saludable. Recuerda que esto va de longevidad. Sabemos que queremos seguir haciendo esto con 60, 70, eighty y ninety años. Para mí, es importante vivir una larga vida», reflexionó. El atleta de forty six años en una celebridad en las redes sociales, en las que muestra sus progresos corporales a sus fanáticos a través de imágenes. El ex «Mr. California», posee más de un millón de seguidores, que hoy, rezan por su salud.
«Sólo quiero ser clara, Piana está todavía vivo. Todo lo que su familia y yo pedimos son pensamientos positivos, oraciones y amor», pidió Jansen en las redes sociales. Wealthy Piana, un destacado fisiculturista reconocido en redes sociales, murió luego de haber sido inducido a un coma médico hace dos semanas. La propia joven ha informado en un mensaje de Instagram que «Rich AÚN ESTÁ VIVO» y pedido que todo el mundo rece por él. Sin embargo, según medios USA e internacionales los augurios no son buenos y se habla de una posible sobredosis de anabólicos. Alarmada, su novia Chanel Jansen llamó a la policía, que en el posterior registro del domicilio encontró, como explican medios americanos, «20 botellas de estroides». Su madre también era fisicoculturista, por lo que él decidió empezar a entrenar desde los 11 años, luego de ver cómo lo hacía su mamá.
—Esencia Urovital Frasco X 25 Ml, comprar esteroides legales tren acetate. En la valoracion inicial, el paciente se encuentra palido, sudoroso, taquipneico, con taquicardia e hipotension, . En la exploracion presenta un abdomen doloroso a la palpacion a nivel del hipocondrio derecho y hepatomegalia. La ecografia abdominal mostro hepatomegalia y desestructuracion del parenquima hepatico. Es ingresado en la Unidad de Cuidados Intensivos, procediendose a la monitorizacion, transfusion y administracion de farmacos vasoactivos. Wealthy Piana comenzó a ir al gimnasio con eleven años y a los 15 ya participaba en competiciones, ha sido campeón de fisicoculturismo en más de una ocasión. Su sistema para mantener esa musculatura consiste en realizar intensas rutinas de ejercicio muscular, además de ingerir nueve comidas diarias y grandes cantidades de batidos de proteína.
Él fue doble en el remake El planeta de los simios de 2001, además de tener otras collection y documentales sobre él. Creó un plan de nutrición además de una línea de suplementos que llamó «Rich Piana 5%» que se refería a que solo este porcentaje de personas que realmente estaban haciendo lo necesario para cumplir sus metas. Al perder a su padre, Shawn cayó en el vicio del alcoholismo, pero que logró superar gracias al apoyo de su amiga Lenore Carroll. Posteriormente, él comenzó a entrenar arduamente hasta alcanzar un cuerpo digno del título de Mr. Olimpia en 2018, pero fue acusado agredir sexualmente a una de sus «protegidas», hecho que le prohibió competir en cualquier concurso hasta que no se resolviera su situación legal. Me inspiró de muchas maneras para ver el enorme impacto que tuviste en las personas de todo el mundo «, escribió Sara Piana. En un video publicado por Rich mucho antes de su muerte, menciona que la insulina period de gran utilidad para el culturismo.
Wealthy Piana, conocido culturista que llevaba 25 a�os tomando esteroides y que contaba con m�s de un mill�n de seguidores en Instagram, muri� de una sobredosis a los 46 a�os. Rich Piana es un fisicoculturista de 45 años que ha admitido que eat esteroides desde los 18 años. Desde los 18 años, reconoció que se inyectaba esteroides, y muchos agradecían su honestidad al hablar abiertamente sobre este tema, y en algún momento habló sobre la importancia de tomarlos y dejarlos en ciclos, los cuales, señalaba, «tenía controlados». Al momento en que la policía entró a su casa el día que se desplomó, encontraron 20 botes de testosterona vacíos, a lo cual era adicto. Según The Sun, la policía también encontró un «polvo blanco», que se presume, period cocaína. Wealthy fue ingresado al hospital donde se supo, había sufrido una sobredosis, que algunos han señalado fue de esteroides, y otros, que se debía a su supuesta adicción a la cocaína. Piana pesa cerca de 140 kg, y suele aparecer en público junto a su esposa, Sarah.
Wealthy Piana empezó a levantar pesas a los eleven años, y a los 15 ya competía en concursos de fisioculturismo. Desde entonces hasta sus actuales 46 años, ha llevado su pastime hasta el máximo exponente, y ha alcanzado la fama en Instagram. En ese sentido, uno de los casos que ha impactado en el último tiempo es el del fisicoculturista norteamericano Rich Piana, quien no tiene problemas en reconocer que desde hace años toma esteroides anabólicos para alcanzar el cuerpo que toda su vida ha soñado. Posteriormente, la policía le incautó hasta 20 botellas de esteroides. En el año 2016 publicó un vídeo en YouTube en que explicaba la situación y animaba a evitar su error. El estadounidense reconoció en un video de YouTube que durante 27 añs tomó suplementos y, a pesar de que se trataba de una rutina no muy sana, nunca se arrepintió.
Reconoció a los profesionales médicos que con frecuencia tomaba de 20 a 30 pastillas todos los días. Según algunas fuentes, luego de que Piana falleciera repentinamente, las autoridades descubrieron 20 botellas de esteroides en su casa. Aunque es considerado como el ganador con mayor edad (43 años) de la máxima competición del mundo del fisicoculturismo, Rhoden sufrió algunos baches en el camino. Aziz Serguéyevich Shavershian, de origen ruso, fue un referente en el mundo del health que murió a la edad de 22 años, pero creó un concepto que hasta la fecha sigue siendo un referente de entrenamiento, Aesthetics. Los daños por el uso de estas sustancias, que en la mayoría de los casos no está avalado por una organización de salud, van desde perdida del cabello, problemas hepáticos y hasta la muerte misma. El uso de esteroides y anabólicos en el mundo del fisicoculturismo puede llegar a ser un tema tabú en muchos gimnasios y entre los más prominentes atletas de este deporte, pero en el bajo mundo se habla mucho de ellos. La esposa del fisiculturista, Sara Piana, anunció la muerte en Fb el viernes por la mañana, después de una semana de rumores contradictorios sobre su estado de salud.
References:
Chemical Structure Of Testosterone (https://ariaqa.com/employer/resultados-del-clembuterol/)
En 2016, Wealthy Piana declaró abiertamente que consumía esteroides porque «solo te dañas a ti mismo»y opinó que, si alguien desea convertirse en culturista profesional, «no tendrá otra opción». En un video de YouTube que publicó el año pasado, Piana dijo que tomó esteroides durante 27 años y aconsejó a sus seguidores que no realicen esta práctica. Me siento tan triste y me rompe el corazón que no haya conseguido salir adelante. Realmente tocó el corazón de muchas personas y ayudó a tantos» comentó. Pero enfatizó que no hay evidencia de los resultados que sugieran que las drogas jugaron un papel en el fallecimiento de Piana. La mañana de este viernes (25) se confirmó la muerte del famoso fisiculturista Wealthy Piana.
«Si quieres convertirte en culturista profesional, probablemente tendrás que consumirlos», comentó. —Neurologicos alteracion del estado de animo, deficit de memoria, psicosis en casos particulares, comprar esteroides legales tren acetate. Hay que tener ojo porque en ocasiones los productos son falsificaciones baratas o farmacos de calidad inferior de fabricacion native , avisa el australiano. En segundo lugar, no es toxico y tiene una vida media corta, lo que lo hace seguro de usar.
Finalmente, tras días luchando por su vida y después de que su novia Chanel Jansen asegurase que «quiero dejar claro que Rich sigue vivo. Todo lo que pedimos su familia y yo son pensamientos positivos, oraciones y amor», el culturista ha fallecido. Piana llevaba 25 años tomando esteroides, y encontraron en la misma habitación más de 20 envases, además de «un polvo blanco» sobre la mesa, que estaba junto a una tarjeta de crédito y una pajita. El médico, que se encargó de evaluar su evolución, confirmó que el culturista falleció este viernes dentro del hospital. «Salvé la vida de Rich una vez antes, me alegro de haber estado allí para él en ese momento. Espero que te sientas mejor ahora en el cielo y que estés ahí arriba saludable y sonriendo. Chanel Jansen, novia del deportista, lo halló inconsciente y con un golpe en la cabeza en su casa de Florida. Luego de intentar socorrerlo, la mujer llamó a la Policía, quien informó que en el lugar había al menos 20 botellas de esteroides.
Él fue doble en el remake El planeta de los simios de 2001, además de tener otras collection y documentales sobre él. Creó un plan de nutrición además de una línea de suplementos que llamó «Rich Piana 5%» que se refería a que solo este porcentaje de personas que realmente estaban haciendo lo necesario para cumplir sus metas. Al perder a su padre, Shawn cayó en el vicio del alcoholismo, pero que logró superar gracias al apoyo de su amiga Lenore Carroll. Posteriormente, él comenzó a entrenar arduamente hasta alcanzar un cuerpo digno del título de Mr. Olimpia en 2018, pero fue acusado agredir sexualmente a una de sus «protegidas», hecho que le prohibió competir en cualquier concurso hasta que no se resolviera su situación authorized. Me inspiró de muchas maneras para ver el enorme impacto que tuviste en las personas de todo el mundo «, escribió Sara Piana. En un video publicado por Rich mucho antes de su muerte, menciona que la insulina period de gran utilidad para el culturismo.
Hubo un aumento significativo en la tasa de hiperglucemia en un estudio OR 4,89; IC del 95 1,20 a 19,94, .. Según informó el portal TMZ, la policía encontró en su casa 20 botellas de testosterona cuando acudieron a su casa después de que sufriera el desmayo. El informe policial ha revelado que cuando cayó al suelo se echó la mano al pecho. Cuando se desvaneció se encontraba con su pareja, quien no fue capaz de reanimarle y llamó a los servicios de emergencias. La mujer explicó que Rich Piana había superado su adicción a los opiáceos pero que ella había intentado que se recuperara en aquel momento inyectando Narcan por si se hubiera tratado de una sobredosis.
Rich Piana, conocido culturista que llevaba 25 a�os tomando esteroides y que contaba con m�s de un mill�n de seguidores en Instagram, muri� de una sobredosis a los forty six a�os. Wealthy Piana es un fisicoculturista de 45 años que ha admitido que devour esteroides desde los 18 años. Desde los 18 años, reconoció que se inyectaba esteroides, y muchos agradecían su honestidad al hablar abiertamente sobre este tema, y en algún momento habló sobre la importancia de tomarlos y dejarlos en ciclos, los cuales, señalaba, «tenía controlados». Al momento en que la policía entró a su casa el día que se desplomó, encontraron 20 botes de testosterona vacíos, a lo cual period adicto. Según The Solar, la policía también encontró un «polvo blanco», que se presume, era cocaína. Rich fue ingresado al hospital donde se supo, había sufrido una sobredosis, que algunos han señalado fue de esteroides, y otros, que se debía a su supuesta adicción a la cocaína. Piana pesa cerca de one hundred forty kg, y suele aparecer en público junto a su esposa, Sarah.
‘No hay razón para tomar esteroides, solo hieres tu cuerpo y a ti mismo. El deportista estadounidense perdió el conocimiento en su casa de Florida, de forma repentina y estrellándose con la cabeza contra el suelo. Su novia ChanelJansen avisó inmediatamente a emergencias y una vez hospitalizado los médicos le indujeron en coma.
Dirigía una empresa que se dedicaba a la distribución de suplementos alimenticios y otros productos relacionados. Según había revelado en una entrevista, entrenaba todos los días (especialmente con máquinas), comía ocho veces diarias y completaba su rutina con suplementos. Wealthy Piana, uno de los culturistas más populares en Instagram, falleció en agosto del año 2017 tras dos semanas en coma inducido. El estadounidense había ingresado en un hospital después de desmayarse mientras se cortaba el pelo en casa. La autopsia, a la que Males’s Well Being tuvo acceso en exclusiva, afirmó que había muerto por una causa desconocida pero que sufría «significativos» problemas de corazón. —Libro Anabolizantes Esteroides, Peptidos Y Otras Sustancias, comprar esteroides legales tren acetate.
Reconoció a los profesionales médicos que con frecuencia tomaba de 20 a 30 pastillas todos los días. Según algunas fuentes, luego de que Piana falleciera repentinamente, las autoridades descubrieron 20 botellas de esteroides en su casa. Aunque es considerado como el ganador con mayor edad (43 años) de la máxima competición del mundo del fisicoculturismo, Rhoden sufrió algunos baches en el camino. Aziz Serguéyevich Shavershian, de origen ruso, fue un referente en el mundo del health que murió a la edad de 22 años, pero creó un concepto que hasta la fecha sigue siendo un referente de entrenamiento, Aesthetics. Los daños por el uso de estas sustancias, que en la mayoría de los casos no está avalado por una organización de salud, van desde perdida del cabello, problemas hepáticos y hasta la muerte misma. El uso de esteroides y anabólicos en el mundo del fisicoculturismo puede llegar a ser un tema tabú en muchos gimnasios y entre los más prominentes atletas de este deporte, pero en el bajo mundo se habla mucho de ellos. La esposa del fisiculturista, Sara Piana, anunció la muerte en Facebook el viernes por la mañana, después de una semana de rumores contradictorios sobre su estado de salud.
Rich Piana empezó a levantar pesas a los eleven años, y a los 15 ya competía en concursos de fisioculturismo. Desde entonces hasta sus actuales forty six años, ha llevado su interest hasta el máximo exponente, y ha alcanzado la fama en Instagram. En ese sentido, uno de los casos que ha impactado en el último tiempo es el del fisicoculturista norteamericano Rich Piana, quien no tiene problemas en reconocer que desde hace años toma esteroides anabólicos para alcanzar el cuerpo que toda su vida ha soñado. Posteriormente, la policía le incautó hasta 20 botellas de esteroides. En el año 2016 publicó un vídeo en YouTube en que explicaba la situación y animaba a evitar su error. El estadounidense reconoció en un video de YouTube que durante 27 añs tomó suplementos y, a pesar de que se trataba de una rutina no muy sana, nunca se arrepintió.
Pero tras años tomando esteroides y anabólicos, obviamente sé lo que estoy haciendo», advirtió. Chanel todavía contó que Piana luchó contra el vicio de opio y que creía que estaba limpio, también afirmó que el fisiculturista usaba esteroides hace más de 20 años. En la ocasión, Piana fue llevado al hospital y colocado en coma inducido. El fisicoculturista Shawn Rhoden falleció recientemente a causa de un ataque al corazón, pero fue quien le quitó la corona a Phil Heath después de siete años de ostentarla, en el concurso de Mr. Olimpia.
El informe de la autopsia de Wealthy Piana no estableció un vínculo entre el consumo de drogas y su muerte, pero tampoco excluyó el consumo de drogas como issue. Piana murió después de colapsar durante un corte de pelo, por lo que no se descarta por completo la participación de drogas. Ya era demasiado tarde cuando la Oficina del Médico Forense y la policía pidieron que se conservaran las muestras. Pellan dijo que era imposible descartar el uso de drogas porque no había muestras de admisión disponibles. Debido a la falta de hallazgos toxicológicos y las múltiples variables contribuyentes potenciales, el informe de la autopsia de Rich Piana no pudo determinar la causa exacta de la muerte. Descubre 3 plantas aromáticas que ahuyentan chinches de forma natural. Ideales para el calor y humedad, son fáciles de cuidar y decoran tu hogar.
References:
hgh steroid For sale (https://thecareerguard.com/employer/pastillas-de-clenbuterol/)
Pragmatic Play Gates Of Olympus Oyununda Büyük Kayıplar Yaşıyorum!
dede oyunu kumar, Pragmatic Play tarafından sunulan eğlenceli bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, tanrısal bir temaya sahiptir. Zeus’un dünyasına giriş yaparak büyük kazançlar elde edebilirsiniz.
Gates of Olympus demo oyna seçeneği ile oyunun temposunu ve özelliklerini önceden deneyimleyebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun yüksek volatilitesi ve çarpıcı grafikleriyle tanışabilirsiniz. Oyunun ana özellikleri arasında çeşitli bonuslar ve yüksek kazanç fırsatları yer alır. Gates of Olympus ile şansınızı deneyin ve büyük ödüllere ulaşın!
Para obtener los mejores resultados, consuma 3 cápsulas minutos antes de comenzar su entrenamiento. Muchos usuarios reportan ganancias después de una semana de uso de Trenorol, con muchos de ellos reportando resultados óptimos después de dos meses.Al igual que con otros suplementos de esta lista, es necesario tomar 10 días de descanso por cada 60 días que se utiliza el suplemento. Se recomienda una dieta sana y equilibrada y un plan de entrenamiento sensato para obtener resultados óptimos.
El uso de GC origina un menor número de linfocitos, eosinófilos, monocitos y basófilos en la circulación como un efecto más de la redistribución de los mismos que de su destrucción. No obstante, el efecto terapéutico de los GC en ciertos tumores linfáticos puede relacionarse con su capacidad para activar la apoptosis en algunos tejidos linfoides. En contraste, aumenta la cifra de polimorfonucleares circulantes como resultado no sólo de la conocida desmarginación en las paredes vasculares sino también por incremento de su liberación desde la médula ósea y por disminución de la velocidad con la que se eliminan de la circulación. Aunque poco notables, los GC pueden tener efecto sobre las células de la serie roja, y se han descrito casos de anemia en la enfermedad de Addison y de policitemia en la enfermedad de Cushing. Nosotros desaconsejamos de base su empleo, pero en el caso de querer usar esteroides, no se lo tomen a la ligera y pongánse en manos de especialistas para así poder evitar la mayor parte de riesgos. Cuando estan los niveles elevados de corticosteroides, aparece aumento del apetito, como consecuencia, la obesidad, enfermedades tales como hiperglucemia, diabetes mellitus, osteoporosis, miopatía, arritmia, vasculitis, úlceras de estómago. Los corticosteroides sistémicos se utilizan para tratar a las personas con covid‐19 porque contrarrestan la hiperinflamación.
Dependiendo de los grupos funcionales añadidos a esta estructura base, los esteroides pueden adquirir diferentes funciones dentro del organismo. Con el paso del tiempo, nuestro organismo va cambiando, perdiendo entre otras cosas colágeno e hidratación, lo cual repercute sobre nuestra piel volviéndola menos flexible y más flácida. Existen zonas del cuerpo donde esta flacidad se hace más patente, como los brazos, los muslos o la papada. En el artículo de hoy aprenderemos varios remedios que nos ayudarán a combatirla de forma económica, efect … Su potencia es del % respecto a la de la prednisona, pero es mucho más fuerte que otros de los corticoides ya citados.
Algunas plantas producen esteroides naturales que funcionan de manera related a los esteroides humanos. El cuerpo humano no puede convertir la diosgenina por sí solo, por lo que el proceso de conversión requiere la ingestión de sustancias sintéticas posiblemente dañinas. Aumentar significativamente tus niveles de testosterona con esteroides puede llevar a un comportamiento más agresivo en comparación con esa misma persona antes de usarlos o una vez que han dejado de hacerlo. Los estudios han demostrado que el 20 – 60% de los usuarios de esteroides anabólicos experimentan aumentos de irritabilidad y agresividad (estudio, estudio, revisión).
Un gran número de los consumidores de estas sustancias puede experimentar al menos uno de los efectos secundarios. Asimismo, se pueden producir daños en el hígado, impotencia, hipertensión y disminución de los niveles de colesterol (el bueno), que puede derivar en enfermedades cardiovasculares. Dicho todo esto, es necesario advertir que en este listado únicamente hemos puesto algunos indicadores que nos pueden ayudar a distinguir un cuerpo u otro, pero que ni mucho menos tienen la verdad absoluta. Ahora bien, lo que si nos pone de manifiesto es que los efectos secundarios del consumo de estas sustancias pueden ser muchos y algunos de ellos, imperceptibles a simple vista, altamente peligrosos para la salud. Los champiñones no solamente son ideales como ingredientes de una pizza, sino que son alimentos muy saludables.
Sin embargo, también es very important para otros procesos químicos de nuestro cuerpo y sirve como principal fuente de energía para el sistema inmune. Es uno de los productos más populares entre deportistas y atletas de varias disciplinas. Su gran funcionalidad radica en que puede ser utilizada por nuestro cuerpo para sintetizar ATP, la principal fuente de energía para nuestros músculos.
La cerveza es uno de los peores tipos de alcohol cuando se trata este tema, ya que el lúpulo utilizado en su elaboración tiene un alto contenido de estrógeno (hormona femenina). Para reducir el estrés existen diferentes técnicas, como la técnica de Liberación Emocional, la meditación, el yoga, terapias de la risa, entre otras. Se debe tener en cuenta que hay que realizar el estiramiento correcto y empezar gradualmente para evitar lesiones. Comenzar con tres repeticiones y aumentar gradualmente, especialmente si no se está en buen estado físico.
Como por ejemplo, la obtención de compuestos esteroidales para la industria farmacéutica. Como adelantábamos, según un informe de la Comisión Europea, el 6% de las personas que van al gimnasio de manera habitual consumen algún tipo de sustancia anabolizante. Por lo tanto, son muchas las personas expuestas a los altos riesgos que pueden conllevar el consumo de esteroides. Dejando a un lado su uso en el deporte profesional, podemos decir que cada día está más normalizado. De hecho, la mayoría no son ilegales y simplemente están sujetos a prescripción médica. No obstante, su uso puede ser altamente riesgoso para la salud y sus consumidores, o no son plenamente consciente de los riesgos, o los conocen, pero no les restan importancia.
Si conoces los efectos secundarios posibles, puedes tomar medidas para controlar su repercusión. Son eficaces para el tratamiento de salpullidos, enfermedad inflamatoria intestinal, asma y otras afecciones. Sin embargo, el uso de corticoides también conlleva un riesgo de efectos secundarios. Por lo tanto, para poder responder a la pregunta inicial, debemos considerar el momento en el que comenzaste a entrenar porque es un factor determinante en cuánta masa muscular puedes ganar de forma natural a lo largo de los años. Aquellos que comienzan a entrenar desde jóvenes tienen la capacidad de desarrollar más masa muscular, ya que hay más tiempo de margen antes de que comience la pérdida de masa muscular relacionada con la edad. Aunque pueda resultarte sorprendente, existen prodigios de la naturaleza, del esfuerzo y del bien hacer que puedan llegar a tener Índices de Masa Libre de Grasa (FFMI) superiores a 26 puntos, en el caso de los hombres, y superior a 22 puntos, en el caso de las mujeres. Teniendo en cuenta que los límites preestablecidos para esta variable siempre se han considerado inferiores para determinar si alguien es pure o no, podría parecer que estas personas, automáticamente, estén utilizado ayudas, a pesar de que no tiene por qué ser así.
La clara de huevo es una excelente fuente de aminoácidos (proteína), que construyen sus músculos y mejorar su salud en general. Esta información fue utilizada profusamente por los culturistas en los años 1960 y 1970. También hay un mejorador de testosterona llamado «Avena Sativa», que es un extracto derivado de la avena y se ha demostrado que aumenta tus niveles de testosterona, debido principalmente a su gran contenido de saponinas. La ingesta diaria de fitoesteroles varía ampliamente en la población, dependiendo del tipo y de la cantidad de alimentos vegetales que se consuman. La ingesta recurring de esteroles en una dieta normal es de unos 100 a 300 mg por día.
También, en el proceso, evitarás el posible daño físico y psicológico de depender de sustancias artificiales para alcanzar el nivel de estado físico que deseas. La Administración de Control de Drogas (DEA, por sus siglas en inglés) clasifica los esteroides anabólicos androgénicos como drogas incluidas en la Lista III. Solo poseerlos ilegalmente (no recetado por un médico) puede resultar en hasta un año de prisión, y una multa de al menos $1,000 por un primer delito. Si te sientes abrumado por la cantidad de tiempo y energía que necesitas para adquirir más volumen, o si no estás viendo los resultados que deseas, no te preocupes. Mejora tus repeticiones y técnicas con el tiempo a medida que te sientas más cómodo.
Este extracto de Coleus Forskohlii es un potente suplemento dietético que apoya dietas keto y bajas en carbohidratos. Monohidrato de creatina micronizada de alta calidad, este producto es best para quienes buscan aumentar la fuerza y la masa muscular. Apto para veganos, sin gluten y sin lactosa, permite una fácil disolución en líquidos. La mejor forma de tomar zinc y magnesio es mediante un suplemento de ZMA, una combinación de zinc, magnesio y vitamina B6. La vitamina B6 ha demostrado mejorar el efecto de estos minerales al tomarla de forma combinada. Un estudio de 2018 realizado por Hassan encontró que las mujeres adultas con composiciones corporales moderadas y niveles más bajos de grasa corporal tendían a tener niveles más altos de vitamina D activa circulante.
References:
stacking steroids (https://ymlcinmauritania.com/employer/clenbuterol-ciclo/)
Contiene 3 compuestos (citrato, bisglicinato, óxido de magnesio) con una dosis diaria de four hundred mg. Este suplemento está formulado para apoyar la función muscular y reducir la fatiga, lo que es clave para cualquier régimen de entrenamiento. Por este motivo, aunque se trate de un producto pure, debes tener en cuenta que se tienen que seguir unas pautas concretas y determinadas para que no afecten negativamente a tu organismo.
Los esteroides naturales en los mamíferos son sintetizados principalmente en los órganos sexuales, las glándulas adrenales y la placenta, y todos derivan del colesterol. El ciclopentanoperhidrofenantreno, estrano, esterano o gonano, es un hidrocarburo conformado por varios anillos cíclicos que componen el esqueleto central del colesterol y sus derivados hormonales, además de algunos fármacos y sus derivados. Plantas y animales contienen diversos compuestos con esqueletos de ciclopentanoperhidrofenantreno que tienen importantes funciones en sus procesos vitales.
Estos suplementos pueden ayudarte a aumentar tu masa muscular, tu fuerza, tu resistencia y tu rendimiento físico, de forma natural y segura. Estas sustancias tienen un papel importante ayudando al cuerpo a maximizar la producción de hormonas esenciales como la testosterona y la hormona de crecimiento, de manera pure, para el crecimiento muscular. Los suplementos anabólicos naturales son elaborados con sustancias naturales que tienen efectos positivos estimulación de los niveles de las hormonas involucradas en el desarrollo muscular y están pensados para evitar todo tipo de efectos nocivos para la salud. Con el gran aumento de la tecnología de ADN recombinante moderna, los esteroides, tales como la hormona del crecimiento, factores de crecimiento y análogos a base de testosterona se han convertido cada vez más disponibles y asequibles. A pesar de su renovada popularidad, sin embargo, los esteroides anabólicos son ilegales y tienen efectos negativos sobre la salud,estado reproductivo y hasta la personalidad. En respuesta, este artículo tiene como objetivo proporcionar información básica sobre los esteroides anabólicos, el uso apropiado de anabolizantes naturales y cómo aumentar los niveles de producción propios del cuerpo de forma natural, mediante el ejercicio. Los anabólicos naturales son suplementos nutricionales o alimenticios que tienen la capacidad de mejorar o incrementar las cascadas metabólicas producidas por el organismo, lo que hace una mejora en el rendimiento deportivo y masa muscular.
La dosis recomendada de Loopy Bulk Ultimate Stack es tomar three cápsulas al día de cada suplemento con agua, unos 45 minutos antes del entrenamiento. Los días sin entrenamiento se debe tomar una cápsula al día con cada comida principal. Los esteroles vegetales extraídos de las plantas no pueden añadirse a los alimentos con facilidad. Si usted empieza a tomar alimentos enriquecidos con fitoesteroles es importante que su médico lo sepa para que observe el resultado en el próximo management del colesterol. Las personas son diferentes, por la tanto, la reducción del colesterol depende de los antecedentes familiares, así como de los factores que influyen en la dieta y en el estilo de vida. Los fitoesteroles, tienen una estructura comparable al colesterol, sin embargo el organismo humano no puede absorberlos. De hecho, cuando estas sustancias son ingeridas en el contexto de una dieta regular, los fitoesteroles interfieren en la absorción del colesterol en el intestino humano, causando un descenso en las concentraciones de colesterol en sangre.
Normalmente se utilizan en forma de polvo para preparar batidos con un alto valor nutritivo. La hidroxilación de esteroides −progesterona, testosterona, 17 α- metiltestosterona y androsten- three, 17-diona− que presentan el sistema 4-en-3-ona, procede con una alta estéreo y regioselectividad en los C-6 y C-11, con una orientación β en C-6 y con orientación alfa en C-11. La presencia del grupo metilo en C-10 es necesaria para la hidroxilación en el C-11, como se puede observar en los derivados de la 19-nortesterona. La biotransformaciones de esteroides se ha implementado de manera importante en la síntesis parcial de nuevos esteroides, para su evaluación como hormonas y fármacos. Actualmente, existe una amplia variedad de esteroides usados como diuréticos, anabólicos, anti-inflamatorios, anti-androgénicos, anti-conceptivos, anti-tumorales, entre otras aplicaciones. Anabólico se refiere al desarrollo muscular, y androgénico al aumento de las características sexuales masculinas.
Tampoco es adecuado para principiantes o personas que no están dispuestas a seguir una dieta equilibrada y un programa de ejercicios. La dosis recomendada de Trenorol es tomar three cápsulas al día con agua, unos forty five minutos antes del entrenamiento. Es best para hombres experimentados que quieren llevar su físico al siguiente nivel. El consumo de más de 3 gramos de esteroles vegetales al día no proporciona una mayor reducción del colesterol y por lo tanto debe ser evitado. En años sucesivos, fue progresando el conocimiento sobre el uso de GC en la nefritis lúpica y en 1974 hacen historia los trabajos controlados del NIH12, en los que se valora la combinación de esteroides más fármacos inmunosupresores. Además del síndrome nefrótico, básicamente del tipo idiopático, otras entidades de tipo glomerular que históricamente han sido tributarias de tratamiento esteroideo por su clara corticosensibilidad son la nefritis lúpica y la afectación renal de las vasculitis primarias (tabla 2). Lógicamente, esta publicación fue seguida de otras en años sucesivos4-9 que se publicaron en revistas de la categoría de The Lancet, Am J Med, JAMA o Quart J of Med, siendo este último artículo10, fechado en 1967, el primer estudio controlado realizado en este terreno.
Conozcamos las alternativas naturales a los anabolizantes que pueden ayudar en el rendimiento deportivo sin contraindicaciones ni efectos secundarios. Dejando de lado los datos científicos por un momento, en el entorno del culturismo una dosis muy well-liked es la de 3-4 gramos / día, una cantidad de ? Sin embargo, a lo largo de los años no ha habido ningún caso oficial de «enfermedad de la ? -ecdisterona» o intoxicación, ergo, en la práctica, incluso estas dosis más duras parecerían seguras.
El lugar principal de su producción son las gónadas, los testículos y los ovarios. Para una súper abundancia de estas hormonas, el cuerpo responde mediante la supresión de las hormonas sexuales femeninas, ralentiza el desarrollo del óvulo y el útero. Los estrógenos, las hormonas sexuales femeninas, también pueden tener un mal funcionamiento. Si el nivel de estrógeno excede la norma, las mujeres pueden sufrir de un ciclo menstrual, dolor y endurecimiento en las glándulas mamarias, a menudo el estado de ánimo puede cambiar y el peso elevarse bruscamente. La influencia de las hormonas esteroideas en nuestro organismo es basic, uno de los órganos involucrados en este proceso es el hígado, si quieres descubrir mucho más acerca del mismo, te invitamos a que continúes la lectura en nuestro artículo. Los corticoides, conocidos también popularmente como cortisona, son medicamentos derivados de la misma estructura química de las hormonas que se encuentran en las glándulas suprarrenales y que se llaman glucocorticoides.
Nuevamente, por lo common se les ocurren nombres engañosos que imitan intencionalmente los apodos de los esteroides reales para persuadir (a través del advertising engañoso) a los principiantes o novatos del mundo del culturismo. Rara vez encontrará que un culturista experimentado y un usuario de esteroides auténticos sean víctimas de esta estafa. La dosis recomendada es de aproximadamente 5mg por kilo de peso corporal, por lo que para una persona de one hundred kilos debería tomar 500mg diarios. Además, Peter North, popular estrella de cine para adultos, afirma consumir apio antes de sus escenas para mejorar su rendimiento y la producción de esperma. Si quieres probar alguno de estos suplementos, te recomendamos que los compres solo en las páginas internet oficiales de las marcas, ya que así te aseguras de obtener productos originales, seguros y con garantía.
Además de ayudar a la pérdida de peso, este suplemento es también grande para mantener la grasa corporal saludable a la proporción de músculo magro. Sobre todo en el entrenamiento de los fisicoculturistas y otros deportes en los que se necesita mucha masa muscular. Ni qué decir tiene que su uso con este fin se considera una práctica ilegal dentro de esas disciplinas.
El DHEA (Dehidroepiandrosterona) es un compuesto necesario para la producción de testosterona y estrógenos. No actúa directamente sobre los receptores androgénicos, sino que regula la producción de ciertas hormonas, además de ser un inhibidor de las enzimas CYP3A4. Es recomendado sobre todo en personas que sufren de menores niveles de testosterona asociados a la edad. También hay varios esteroides naturales para evitar los alimentos como la soja, el lúpulo y el ñame, por ejemplo, son conocidos por contener grandes cantidades de estrógenos naturales, entonces es beneficioso para un hombre estar lejos de ellos. El Colesterol puede ser el mejor esteroide pure y un precursor de todas las hormonas esteroides en el cuerpo.
References:
https://www.dynamicviewpoint.co.uk/employer/clenbuterol-dosis/
?Hola entusiastas del juego
Muchas plataformas sin verificaciГіn ofrecen apuestas deportivas sin dni en eventos internacionales y nacionales. No importa si estГЎs en casa o de viaje, puedes seguir apostando sin necesidad de verificar tu identidad.
casas de apuestas sin verificaciГіn 2025 — casas apuestas sin dni
?Que tengas excelentes ventajas!
?Hola usuarios de apuestas
Si prefieres apostar sin registrarte y sin tener que subir una selfie con tu DNI, estas casas son ideales. Solo necesitas una conexiГіn a internet y ganas de jugar. Todo lo demГЎs es opcional.
casas apuestas sin dni populares — casas apuestas sin dni
?Que tengas excelentes premios!
¡Hola competidores de casino
ВїTe gustarГa empezar a jugar en segundos? Las casas sin registro permiten apostar directamente sin formularios ni verificaciones.
Casas de apuestas sin licencia: soporte en espaГ±ol — mejores casas de apuestas sin licencia
¡Por muchos instantes divertidos!
Gates Of Olympus ile büyük kayıplar mı veriyorsunuz?
dede kumar oyunu, Pragmatic Play tarafından sunulan heyecan dolu bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, tanrısal bir temaya sahiptir. Oyun, Zeus’un büyüleyici dünyasında eşsiz bir macera sunuyor.
Gates of Olympus demo oyna seçeneği ile oyunun nasıl işlediğini öğrenebilir ve kendinizi geliştirebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun yüksek volatilitesi ve çarpıcı grafikleriyle tanışabilirsiniz. Oyunun ana özellikleri arasında dinamik ödeme sistemi ve büyük ödüller bulunur. Gates of Olympus ile eğlencenin ve kazancın kapılarını aralayın!
1win xyz почта вход http://1win8006.ru .
мостбет казино войти https://mostbet8003.ru/ .
having multidirectional choice of https://expertbeacon.com/exploring-the-uae-with-yeti/
offers provides an opportunity to customers easily analyze
value, types cars and conditions of rent.
Pragmatic Play Gates Of Olympus Oyununda Büyük Kayıplar Yaşıyorum!
dede kumar oyunu, Pragmatic Play tarafından sunulan heyecan dolu bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, tanrısal bir temaya sahiptir. Bu oyun, Zeus’un krallığına adım atma fırsatı sunar.
Gates of Olympus demo oyna seçeneği ile oyunun temposunu ve özelliklerini önceden deneyimleyebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun heyecan verici mekaniklerini ve dinamik yapısını keşfedebilirsiniz. Oyunun ana özellikleri arasında dinamik ödeme sistemi ve büyük ödüller bulunur. Gates of Olympus ile eğlencenin ve kazancın kapılarını aralayın!
you’re truly a just right webmaster. The website loading speed is amazing.
It sort of feels that you are doing any distinctive trick.
Also, The contents are masterpiece. you’ve done a excellent activity
in this subject!
Gates Of Olympus ile büyük kayıplar mı veriyorsunuz?
gates of olympus oyna, Pragmatic Play tarafından sunulan sürükleyici bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, tanrısal bir temaya sahiptir. Zeus’un dünyasına giriş yaparak büyük kazançlar elde edebilirsiniz.
Gates of Olympus demo oyna seçeneği ile oyunun temposunu ve özelliklerini önceden deneyimleyebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun heyecan verici mekaniklerini ve dinamik yapısını keşfedebilirsiniz. Oyunun ana özellikleri arasında çeşitli bonuslar ve yüksek kazanç fırsatları yer alır. Gates of Olympus ile şansınızı deneyin ve büyük ödüllere ulaşın!
Gates of Olympus oyununda kayıplar yaşıyorum!
slot dede oyunu, Pragmatic Play tarafından sunulan heyecan dolu bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, tanrısal bir temaya sahiptir. Zeus’un dünyasına giriş yaparak büyük kazançlar elde edebilirsiniz.
Gates of Olympus demo oyna seçeneği ile oyunun nasıl işlediğini öğrenebilir ve kendinizi geliştirebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun farklı özelliklerini ve kazanç sistemini deneyimleyebilirsiniz. Oyunun ana özellikleri arasında çeşitli bonuslar ve yüksek kazanç fırsatları yer alır. Gates of Olympus ile büyük kazanç fırsatlarını değerlendirin!
Pragmatic Play Gates Of Olympus Oyununda Büyük Kayıplar Yaşıyorum!
casino dede oyunu, Pragmatic Play tarafından sunulan eğlenceli bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, tanrısal bir temaya sahiptir. Zeus’un dünyasına giriş yaparak büyük kazançlar elde edebilirsiniz.
Gates of Olympus demo oyna seçeneği ile stratejinizi oluşturmadan önce deneyim kazanabilirsiniz.
Gates of Olympus oyna demo modunda, oyunun farklı özelliklerini ve kazanç sistemini deneyimleyebilirsiniz. Oyunun ana özellikleri arasında çeşitli bonuslar ve yüksek kazanç fırsatları yer alır. Gates of Olympus ile şansınızı deneyin ve büyük ödüllere ulaşın!
Just want to say your article is as surprising. The clarity in your post is
just spectacular and i can assume you’re an expert on this subject.
Fine with your permission let me to grab your RSS feed to keep updated with
forthcoming post. Thanks a million and please continue the gratifying work.
Gates of Olympus oyununda kayıplar yaşıyorum!
dede oyunu, Pragmatic Play tarafından sunulan heyecan dolu bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, efsanevi bir temaya sahiptir. Oyun, Zeus’un büyüleyici dünyasında eşsiz bir macera sunuyor.
Gates of Olympus demo oyna seçeneği ile stratejinizi oluşturmadan önce deneyim kazanabilirsiniz.
Gates of Olympus oyna demo modunda, oyunun yüksek volatilitesi ve çarpıcı grafikleriyle tanışabilirsiniz. Oyunun ana özellikleri arasında dinamik ödeme sistemi ve büyük ödüller bulunur. Gates of Olympus ile büyük kazanç fırsatlarını değerlendirin!
Gates Of Olympus ile büyük kayıplar mı veriyorsunuz?
dede kumar oyunu, Pragmatic Play tarafından sunulan sürükleyici bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, efsanevi bir temaya sahiptir. Bu oyun, Zeus’un krallığına adım atma fırsatı sunar.
Gates of Olympus demo oyna seçeneği ile stratejinizi oluşturmadan önce deneyim kazanabilirsiniz.
Gates of Olympus oyna demo modunda, oyunun heyecan verici mekaniklerini ve dinamik yapısını keşfedebilirsiniz. Oyunun ana özellikleri arasında dinamik ödeme sistemi ve büyük ödüller bulunur. Gates of Olympus ile şansınızı deneyin ve büyük ödüllere ulaşın!
?Hola usuarios de apuestas
Una gran ventaja de las casas de apuestas no reguladas es que aceptan criptomonedas como mГ©todo de pago,
Las plataformas internacionales sin licencia local suelen ofrecer juegos exclusivos, que no encontrarГЎs en casas reguladas por la DGOJ.
Apuestas sin verificaciГіn: mГ©todos de retiro — casas de apuestas sin licencia en España
?Que tengas excelentes botes acumulados!
1win pariuri https://1win5050.ru .
Gates of Olympus oyununda kayıplar yaşıyorum!
dede demo oyna, Pragmatic Play tarafından sunulan sürükleyici bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, tanrısal bir temaya sahiptir. Oyun, Zeus’un büyüleyici dünyasında eşsiz bir macera sunuyor.
Gates of Olympus demo oyna seçeneği ile oyunun temposunu ve özelliklerini önceden deneyimleyebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun farklı özelliklerini ve kazanç sistemini deneyimleyebilirsiniz. Oyunun ana özellikleri arasında çok sayıda ücretsiz dönüş ve yüksek kazanç potansiyeli bulunur. Gates of Olympus ile eğlencenin ve kazancın kapılarını aralayın!
Gates of Olympus oyununda kayıplar yaşıyorum!
dede kumar oyunu, Pragmatic Play tarafından sunulan eğlenceli bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, efsanevi bir temaya sahiptir. Oyun, Zeus’un büyüleyici dünyasında eşsiz bir macera sunuyor.
Gates of Olympus demo oyna seçeneği ile oyunun nasıl işlediğini öğrenebilir ve kendinizi geliştirebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun farklı özelliklerini ve kazanç sistemini deneyimleyebilirsiniz. Oyunun ana özellikleri arasında çeşitli bonuslar ve yüksek kazanç fırsatları yer alır. Gates of Olympus ile eğlencenin ve kazancın kapılarını aralayın!
1win md 1win md .
Gates Of Olympus ile büyük kayıplar mı veriyorsunuz?
gates of olympus oyna, Pragmatic Play tarafından sunulan sürükleyici bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, efsanevi bir temaya sahiptir. Zeus’un dünyasına giriş yaparak büyük kazançlar elde edebilirsiniz.
Gates of Olympus demo oyna seçeneği ile oyunun nasıl işlediğini öğrenebilir ve kendinizi geliştirebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun yüksek volatilitesi ve çarpıcı grafikleriyle tanışabilirsiniz. Oyunun ana özellikleri arasında çok sayıda ücretsiz dönüş ve yüksek kazanç potansiyeli bulunur. Gates of Olympus ile şansınızı deneyin ve büyük ödüllere ulaşın!
virtual number for whatsapp verification
melbet kg melbet kg .
?Hola entusiastas del juego
Usa tus 20 euros gratis retirables para jugar y ganar sin necesidad de depositar tu dinero.
20 euros gratis retirables: ВїCГіmo cumplir con los requisitos? — casino20eurosgratissindeposito.guru
?Que tengas excelentes ventajas!
Блеск в каждой комнате в культурной столице! Оставьте рутину позади, наслаждайтесь чистотой. Мастерски, оперативно, по разумной цене. Закажите сейчас! Заходите Мытье окон в квартире цены
mostbet uz http://www.mostbet3024.ru .
металлические значки купить оптом железные значки на заказ
скачать mostbet uz скачать mostbet uz .
yacht mieten turkei
скачать mostbet на телефон http://mostbet8007.ru/ .
Wonderful beat ! I wish to apprentice whilst you amend your site, how can i subscribe for a blog website?
The account aided me a appropriate deal. I have been tiny bit familiar of this your broadcast offered bright transparent idea
https://podgoricacar.me/
mines pro 1win telegram https://1win8018.ru .
I am actually glad to read this blog posts which contains tons of valuable facts, thanks
for providing these kinds of data.
Mortgage calculator USA
https://resturant.extraordinarz.com/an-origination-to-arts-and-crafts-hobbyists-3789844111745679936
– Ты знаешь, Иван, у меня сейчас едва удар от жары не сделался! Даже что-то вроде галлюцинации было… – он попытался усмехнуться, но в глазах его еще прыгала тревога, и руки дрожали. накрутка поведенческих факторов программа в москве Этим звукам ответил сверлящий свист мальчишек с кровель домов улицы, выводящей с базара на гипподромскую площадь, и крики «берегись!».
If you want to increase your familiarity just keep visiting
this web site and be updated with the most recent news posted here.
Были подняты вопросы относительно системы вступительных испытаний в университеты (система централизованного тестирования),.
Have a look at my web blog; https://hexly.ru/blog/raspisanie-oge
https://es.niadd.com/article/1502859.html
– Глубокой ночью, в белье… Вы плохо чувствуете себя, останьтесь у нас! – Пропустите-ка, – сказал Иван санитарам, сомкнувшимся у дверей. недорого накрутка поведенческих факторов программа В саду было тихо.
1win казино регистрация 1win казино регистрация .
Bookmakers very often hold various promotions to attract new customers, offering them bonuses upon registration https://jobs.siliconflorist.com/employers/3589767-promo-code
– Видите ли, профессор, – принужденно улыбнувшись, отозвался Берлиоз, – мы уважаем ваши большие знания, но сами по этому вопросу придерживаемся другой точки зрения. продвижение сайта самостоятельно Позвольте же вас спросить, как же может управлять человек, если он не только лишен возможности составить какой-нибудь план хотя бы на смехотворно короткий срок, ну, лет, скажем, в тысячу, но не может ручаться даже за свой собственный завтрашний день? И в самом деле, – тут неизвестный повернулся к Берлиозу, – вообразите, что вы, например, начнете управлять, распоряжаться и другими и собою, вообще, так сказать, входить во вкус, и вдруг у вас… кхе… кхе… саркома легкого… – тут иностранец сладко усмехнулся, как будто мысль о саркоме легкого доставила ему удовольствие, – да, саркома, – жмурясь, как кот, повторил он звучное слово, – и вот ваше управление закончилось! Ничья судьба, кроме своей собственной, вас более не интересует.
continuously i used to read smaller posts that
also clear their motive, and that is also happening with this post
which I am reading at this time.
1win приложение скачать на андроид официальный сайт http://1win8019.ru .
как вывести бонусы с 1win на карту https://www.1win8020.ru .
Жилищные споры в Алматы — не редкость. Ошибки в квитанциях, некачественные услуги, затопления, конфликты с управляющими компаниями — всё это требует юридической поддержки http://jade-crack.com/home.php?mod=space&username=amuhoki
Подложной». микрозайм онлайн От этого он до того обезумел, что, упавши на скамью, укусил себя за руку до крови.
I recently stumbled upon **Free Deposit 365**,
and I must say, it’s a revolutionary for anyone who
enjoys online gaming but doesn’t want to take the financial
risk. The idea of a **free deposit** is amazing because it allows you to enjoy the games without having to
spend your own money. I was really impressed by how simple it was to
join, and with the **free new register** bonus,
it’s even easier to dive into the fun without worrying
about investing any money upfront.
What’s even more exciting is the fact that with **freenodeposit365**,
you get to experience all the features without the typical worries of financial commitment.
This platform really makes it easy for anyone to explore gaming
without the usual pressure to deposit. **Freedeposit365** really offers a
unique way to enjoy online entertainment without any
upfront cost, which is perfect for those new to
the scene or anyone who just wants to enjoy risk-free play.
I’ve always been someone who’s cautious
about online games that require deposits, but with **free tanpa
deposit**, I feel confident knowing I can play for free and still get a chance to win. Whether you’re
new to the gaming world or someone who enjoys playing casually,
**Free Deposit 365** is a great way to start without
any financial commitment. I’ve already recommended it
to several friends, and they’re all loving the idea of playing without any
risk.
If you’re looking for a trustworthy platform that allows you to test your luck with no strings attached, I highly endorse giving **Free Deposit 365**
a try. It’s definitely worth exploring, especially if you enjoy playing games but don’t want to dive in with deposits
right away. Enjoy the experience without the worry of spending money!
бот лаки джет [url=1win8004.ru]1win8004.ru[/url] .
– Ах так?! – дико и затравленно озираясь, произнес Иван. микрокредит онлайн Волна не дошла до низшей точки и неожиданно стала опять вырастать и, качаясь, поднялась выше первой, и на второй волне, как на морском валу вскипает пена, вскипел свист и отдельные, сквозь гром различимые, женские стоны.
мостбет кг [url=ugilas.com.kg]ugilas.com.kg[/url] .
Мягкая мебель потеряласть? Химчистка мебели на дому в городе на Неве! Вернем диванам, креслам и коврам первозданный вид. Профессиональные средства и опытные мастера. Скидки первым клиентам! Узнайте подробности! Нажимайте https://himchistka-divanov-spb24.ru — Химчистка мебели в СПб на дому
Степа был хитрым человеком и, как ни был болен, сообразил, что раз уж его застали в таком виде, нужно признаваться во всем. Займер Словом, ад.
– Ты, Иван, – говорил Берлиоз, – очень хорошо и сатирически изобразил, например, рождение Иисуса, сына Божия, но соль-то в том, что еще до Иисуса родился целый ряд сынов Божиих, как, скажем, финикийский Адонис, фригийский Аттис, персидский Митра. добавить ваш сайт Ты хочешь сказать, Фока, что судачки можно встретить и в «Колизее».
Вот только дама, которую Степа хотел поцеловать, осталась неразъясненной… черт ее знает, кто она… кажется, в радио служит, а может быть, и нет. разместить сайт в сети интернет на – Глубокой ночью, в белье… Вы плохо чувствуете себя, останьтесь у нас! – Пропустите-ка, – сказал Иван санитарам, сомкнувшимся у дверей.
– Как? А… где же вы будете жить? – В вашей квартире, – вдруг развязно ответил сумасшедший и подмигнул. замена уплотнителя стекла И мысль об яде вдруг соблазнительно мелькнула в больной голове прокуратора.
Не только у будочки, но и во всей аллее, параллельной Малой Бронной улице, не оказалось ни одного человека. москитная сетка цена Попав в тень чуть зеленеющих лип, писатели первым долгом бросились к пестро раскрашенной будочке с надписью «Пиво и воды».
Now you know where the ten city region of Decapolis is map of the conquest of canaan
Мобильная чистка в жемчужине России и ЛО! Мягкая мебель, ворсистые покрытия, удобные сиденья — возродим красоту и свежести прямо у вас дома! Набирайте номер! Кликайте Чистка матраса на дому
Первоначально он отнесся ко мне неприязненно и даже оскорблял меня, то есть думал, что оскорбляет, называя меня собакой, – тут арестант усмехнулся, – я лично не вижу ничего дурного в этом звере, чтобы обижаться на это слово… Секретарь перестал записывать и исподтишка бросил удивленный взгляд, но не на арестованного, а на прокуратора. сетки на окна антикошка цена в москве » Но это, увы, было, и длинный, сквозь которого видно, гражданин, не касаясь земли, качался перед ним и влево и вправо.
А тут еще алкоголизм… Рюхин ничего не понял из слов доктора, кроме того, что дела Ивана Николаевича, видно, плоховаты, вздохнул и спросил: – А что это он все про какого-то консультанта говорит? – Видел, наверное, кого-то, кто поразил его расстроенное воображение. Ремонт пластиковых окон Полежаевская Тут он взглянул на дверь в кабинет Берлиоза, бывшую рядом с передней, и тут, как говорится, остолбенел.
металлические значки на рюкзак http://izgotovlenie-znachkov-moskva.ru
1win регистрация верификация http://1win10001.ru .
металлические значки под заказ изготовление значков из металла на заказ москва
металлический значок металлические пины на заказ
Scure seⅼf storage inn Worething fⲟr caravans, cars, andd motorhomes.
Aruun Seⅼf Storagte offers affordable solutions іn Littlehampton Marina.
Злая вороная взмокшая лошадь шарахнулась, поднялась на дыбы. заверенный перевод паспорта Тут послышалось слово: «Доктора!» – и чье-то ласковое мясистое лицо, бритое и упитанное, в роговых очках, появилось перед Иваном.
QuickBooks Integrations Online Accounting Software Usa. Qbis Helps You To Sync Your Data With Quickbooks Online As Well As Quickbooks Desktop.
– А не надо никаких точек зрения, – ответил странный профессор. бюро переводов нотариальное заверение рядом со мной – Прошу и меня извинить, – ответил иностранец, – но это так.
– Браво! Вы полностью повторили мысль беспокойного старика Иммануила по этому поводу. где сделать перевод паспорта иностранного – Ты, Иван, – говорил Берлиоз, – очень хорошо и сатирически изобразил, например, рождение Иисуса, сына Божия, но соль-то в том, что еще до Иисуса родился целый ряд сынов Божиих, как, скажем, финикийский Адонис, фригийский Аттис, персидский Митра.
The power and beauty of the world will be fully revealed to you https://pdxstorytheater.org/wp-content/pgs/originalynoe_oformlenie_sten_v_spalyne.html
Тогда Иван твердо сказал самому себе: – Ну конечно, он на Москве-реке! Вперед! Следовало бы, пожалуй, спросить Ивана Николаевича, почему он полагает, что профессор именно на Москве-реке, а не где-нибудь в другом месте. перевод водительского удостоверения на русский Но дело в том, что…» Однако он не успел выговорить этих слов, как заговорил иностранец: – Да, человек смертен, но это было бы еще полбеды.
Вышел на веранду черноглазый красавец с кинжальной бородой, во фраке и царственным взором окинул свои владения. нотариус Домодедовская – А между тем удивляться нечему.
скачать 1win на андроид http://1win10017.ru .
продажа аккаунтов соцсетей продажа аккаунтов соцсетей
аккаунт для рекламы заработок на аккаунтах
– Вообще они в последнее время жутко свинячат. нотариус Боровское шоссе Прочитав поданное, он еще более изменился в лице.
Но иностранец ничуть не обиделся и превесело рассмеялся. нотариус Якушевская Тогда Иван твердо сказал самому себе: – Ну конечно, он на Москве-реке! Вперед! Следовало бы, пожалуй, спросить Ивана Николаевича, почему он полагает, что профессор именно на Москве-реке, а не где-нибудь в другом месте.
Повернув и выйдя на прямую, он внезапно осветился изнутри электричеством, взвыл и наддал. нотариус Преображенская площадь Глава 6 Шизофрения, как и было сказано Когда в приемную знаменитой психиатрической клиники, недавно отстроенной под Москвой на берегу реки, вышел человек с острой бородкой и облаченный в белый халат, была половина второго ночи.
Drexel Online Casino – это современная платформа для азартных игр, предлагающая широкий выбор увлекательных игр, включая слоты, покер, блэкджек и рулетку. С удобным интерфейсом и надежной системой безопасности пользователи могут наслаждаться игрой в любое время и в любом месте. Регулярные акции и бонусы делают каждую игру еще более захватывающей. Присоединяйтесь к сообществу азартных игроков и испытайте удачу в Drexel Online Casino дрексел рабочее зеркало
Крысобой был на голову выше самого высокого из солдат легиона и настолько широк в плечах, что совершенно заслонил еще невысокое солнце. нотариус метро Китай-город Тот был уже у выхода в Патриарший переулок, и притом не один.
– Где я только не бывал! Жаль только, что я не удосужился спросить у профессора, что такое шизофрения. Фурнитура капота Свет, и так слабый в спальне, и вовсе начал меркнуть в глазах Степы.
Однако удачи не было. Ремкомплекты дифференциала А ресторан зажил своей обычной ночной жизнью и жил бы ею до закрытия, то есть до четырех часов утра, если бы не произошло нечто, уже совершенно из ряду вон выходящее и поразившее ресторанных гостей гораздо больше, чем известие о гибели Берлиоза.
1вин фрибет 1вин фрибет .
Посмотрите на его постную физиономию и сличите с теми звучными стихами, которые он сочинил к первому числу! Хе-хе-хе… «Взвейтесь!» да «развейтесь!»… а вы загляните к нему внутрь – что он там думает… вы ахнете! – И Иван Николаевич зловеще рассмеялся. квартира комнатный косметический ремонт – Какие предпочитаете? – повторил неизвестный.
Заказать корпоративные, сувенирные или памятные значки можно на сайте https://znaknazakaz.ru/ — профессиональное производство и индивидуальный подход.
букмекерские конторы бишкек http://mostbet10007.ru/ .
Секретарь думал теперь только об одном, верить ли ему ушам своим или не верить. дизайнерский ремонт коттеджей Берлиоз не стал слушать попрошайку и ломаку регента, подбежал к турникету и взялся за него рукой.
casino 1win http://www.1win1016.top .
Рот какой-то кривой. ремонт трехкомнатных квартир москва – Но требуется же какое-нибудь доказательство… – начал Берлиоз.
маркетплейс аккаунтов соцсетей магазин аккаунтов социальных сетей
Oh my goodness! Amazing article dude! Thank you, However I am experiencing problems with your RSS.
I don’t understand why I cannot subscribe to it. Is there anybody else getting similar RSS issues?
Anybody who knows the answer will you kindly respond? Thanx!!
что такое мостбет mostbet10006.ru .
This site truly has all the info I wanted about this subject and didn’t know who to
ask.
skachat mostbet http://www.mostbet10009.ru .
Looking for the best online casino in Australia? **WFGaming** offers fantastic
**no deposit bonuses** for newcomers. If you’re looking for **WFGaming Free** or
**Free Deposit 365**, this is definitely the platform to check
out. With **WFGaming Free 365**, you’ll find special deals that make
your gaming experience even more exciting.
**WF Gaming Australia** is a trusted platform that offers a range of bonuses,
including **WFGaming Free**, so you can enjoy your favorite games without any initial investment.
Plus, **Free Deposit 365** ensures that you always access to the best bonuses and deals on the market.
Whether you’re into table games or live casino options,
**WFGaming** has something for everyone. **Join WFGaming
Free** at **WF Gaming** now and experience special bonuses
and promotions. Don’t miss out on the best gaming opportunities in Down Under with **WFGaming
Free** and **Free Deposit 365**.
Start your journey with **WF Gaming** and get your **free deposit bonus** today!
You won’t regret it!
Purchase Ready-Made Accounts Account Selling Platform
1win это что http://1win10004.ru .
Hello, after reading this amazing piece of writing i am too happy to share my experience here with mates.
отзывы 1win https://1win10006.ru/ .
1 win официальный сайт регистрация http://1win10027.ru .
бонус код 1win http://1win10023.ru .
The floors in this room are best made of natural or artificial stone, as they have many advantages — they are easy to wash https://andtherev.com/wp-content/pgs/seks_vo_vremya_kriticheskih_dney.html
Ready-Made Accounts for Sale Accounts marketplace
Account Buying Service Guaranteed Accounts
Turkey has completely banned all casinos, has a state monopoly on sports betting and lotteries, and strictly controls online gambling Online course – SEO for gambling in Turkey. TG – @helena_kaya
HoYoLAB is the gaming community forum for HoYoverse games, including Honkai Impact 3rd, Genshin Impact, and Tears of Themis, with official information about Çevrimiçi kurs – Türkiye’de Kumar (Casino) için SEO. Telegram – @aysu_kaya
speed n cash стратегия https://1win10028.ru .
This guide will take you through the steps of progressing from a beginner to a skilled trekker, ensuring your adventures become more enjoyable and fulfilling SEO BACKLINKS, CROSS-LINKS, HACKED WP-ADMIN — TELEGRAM @SEO_ANOMALY
Account Selling Platform Account Selling Service
A gift that is too cheap or expensive may be perceived as an insult. It is customary to refuse to accept a gift several times https://casinoadvisers.com/wp-content/pgs/?izmena_lyubimogo_chto_delaty.html
Mostbet – spännande livespel.
Цена рассчитывается индивидуально после оценки темы и методических требований, включает глубокое исследование, оформление по ГОСТ, проверку уникальности и бесплатное сопровождение до защиты — без скрытых доплат и с чёткими сроками кандидатская диссертация на заказ цена под ключ
Подготовим магистерскую диссертацию с нуля — от фундаментального исследования и анализа источников до оформления по ГОСТ и проверки уникальности магистерская цена
1win casino aviator https://1win10030.ru .
Gates of Olympus oyununda kayıplar yaşıyorum!
dede oyunu para kazanma, Pragmatic Play tarafından sunulan eğlenceli bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, efsanevi bir temaya sahiptir. Bu oyun, Zeus’un krallığına adım atma fırsatı sunar.
Gates of Olympus demo oyna seçeneği ile oyunun nasıl işlediğini öğrenebilir ve kendinizi geliştirebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun yüksek volatilitesi ve çarpıcı grafikleriyle tanışabilirsiniz. Oyunun ana özellikleri arasında çeşitli bonuslar ve yüksek kazanç fırsatları yer alır. Gates of Olympus ile büyük kazanç fırsatlarını değerlendirin!
1win как пополнить https://www.1win10029.ru .
Pragmatic Play Gates Of Olympus Oyununda Büyük Kayıplar Yaşıyorum!
casino dede oyunu, Pragmatic Play tarafından sunulan eğlenceli bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, tanrısal bir temaya sahiptir. Zeus’un dünyasına giriş yaparak büyük kazançlar elde edebilirsiniz.
Gates of Olympus demo oyna seçeneği ile oyunun temposunu ve özelliklerini önceden deneyimleyebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun heyecan verici mekaniklerini ve dinamik yapısını keşfedebilirsiniz. Oyunun ana özellikleri arasında çok sayıda ücretsiz dönüş ve yüksek kazanç potansiyeli bulunur. Gates of Olympus ile şansınızı deneyin ve büyük ödüllere ulaşın!
website for selling accounts secure account purchasing platform
database of accounts for sale account buying service
Pragmatic Play Gates Of Olympus Oyununda Büyük Kayıplar Yaşıyorum!
dede oyunu para kazanma, Pragmatic Play tarafından sunulan eğlenceli bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, tanrısal bir temaya sahiptir. Bu oyun, Zeus’un krallığına adım atma fırsatı sunar.
Gates of Olympus demo oyna seçeneği ile oyunun nasıl işlediğini öğrenebilir ve kendinizi geliştirebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun farklı özelliklerini ve kazanç sistemini deneyimleyebilirsiniz. Oyunun ana özellikleri arasında dinamik ödeme sistemi ve büyük ödüller bulunur. Gates of Olympus ile eğlencenin ve kazancın kapılarını aralayın!
The platform also boasts a robust casino section with live dealers, table games, and cutting-edge slots https://findmyjobs.lk/author/xbetspin1s/
I was very happy to find this page. I wanted to thank you for your
time just for this fantastic read!! I definitely liked every part of it and I have
you book marked to see new stuff in your blog.
This exclusive 1xBet promo code sets new players up for success, whether betting on an exciting Champions League match or spinning vibrant slots in the casino https://findmyjobs.lk/author/xbetspin1s/
https://50style.ru/
We will also come across the remains of a fort built in the Bronze Age, Early Christian churches and the best Irish pubs https://www.vasiltole.com/English/pages/?vidy_korrozii_i_ih_harakteristiki.html
Gates of Olympus oyununda kayıplar yaşıyorum!
dede oyunu, Pragmatic Play tarafından sunulan eğlenceli bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, tanrısal bir temaya sahiptir. Bu oyun, Zeus’un krallığına adım atma fırsatı sunar.
Gates of Olympus demo oyna seçeneği ile stratejinizi oluşturmadan önce deneyim kazanabilirsiniz.
Gates of Olympus oyna demo modunda, oyunun farklı özelliklerini ve kazanç sistemini deneyimleyebilirsiniz. Oyunun ana özellikleri arasında çeşitli bonuslar ve yüksek kazanç fırsatları yer alır. Gates of Olympus ile büyük kazanç fırsatlarını değerlendirin!
Pragmatic Play Gates Of Olympus Oyununda Büyük Kayıplar Yaşıyorum!
dede oyunu kumar, Pragmatic Play tarafından sunulan eğlenceli bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, tanrısal bir temaya sahiptir. Zeus’un dünyasına giriş yaparak büyük kazançlar elde edebilirsiniz.
Gates of Olympus demo oyna seçeneği ile stratejinizi oluşturmadan önce deneyim kazanabilirsiniz.
Gates of Olympus oyna demo modunda, oyunun farklı özelliklerini ve kazanç sistemini deneyimleyebilirsiniz. Oyunun ana özellikleri arasında çeşitli bonuslar ve yüksek kazanç fırsatları yer alır. Gates of Olympus ile büyük kazanç fırsatlarını değerlendirin!
мостбет.сом https://mostbet10008.ru .
Gates Of Olympus ile büyük kayıplar mı veriyorsunuz?
gates of olympus oyna, Pragmatic Play tarafından sunulan heyecan dolu bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, mitolojik bir temaya sahiptir. Zeus’un dünyasına giriş yaparak büyük kazançlar elde edebilirsiniz.
Gates of Olympus demo oyna seçeneği ile oyunun nasıl işlediğini öğrenebilir ve kendinizi geliştirebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun heyecan verici mekaniklerini ve dinamik yapısını keşfedebilirsiniz. Oyunun ana özellikleri arasında çok sayıda ücretsiz dönüş ve yüksek kazanç potansiyeli bulunur. Gates of Olympus ile büyük kazanç fırsatlarını değerlendirin!
If some one wishes to be updated with newest technologies
therefore he must be visit this website and be up to date everyday.
The quality of the tools directly affects the result https://cheltenhamguides.com/art/identifikaciya_borna_2002_opisanie.html
Pragmatic Play Gates Of Olympus Oyununda Büyük Kayıplar Yaşıyorum!
dede oyunu kumar, Pragmatic Play tarafından sunulan sürükleyici bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, mitolojik bir temaya sahiptir. Bu oyun, Zeus’un krallığına adım atma fırsatı sunar.
Gates of Olympus demo oyna seçeneği ile oyunun nasıl işlediğini öğrenebilir ve kendinizi geliştirebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun heyecan verici mekaniklerini ve dinamik yapısını keşfedebilirsiniz. Oyunun ana özellikleri arasında çeşitli bonuslar ve yüksek kazanç fırsatları yer alır. Gates of Olympus ile büyük kazanç fırsatlarını değerlendirin!
Gates Of Olympus ile büyük kayıplar mı veriyorsunuz?
gates of olympus, Pragmatic Play tarafından sunulan heyecan dolu bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, tanrısal bir temaya sahiptir. Bu oyun, Zeus’un krallığına adım atma fırsatı sunar.
Gates of Olympus demo oyna seçeneği ile oyunun nasıl işlediğini öğrenebilir ve kendinizi geliştirebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun farklı özelliklerini ve kazanç sistemini deneyimleyebilirsiniz. Oyunun ana özellikleri arasında çok sayıda ücretsiz dönüş ve yüksek kazanç potansiyeli bulunur. Gates of Olympus ile eğlencenin ve kazancın kapılarını aralayın!
sell pre-made account account marketplace
online account store account purchase
id mostbet com http://mostbet10010.ru .
Сочетаем экспертный опыт и возможности GPT, чтобы быстро подготовить курсовую работу с глубокой аналитикой нейросеть для написания курсовой
1xBet code with an exclusive welcome bonus, we present details on how to use the code https://israelafrica.mn.co/posts/83971084?utm_source=manual
I was suggested this web site by my cousin. I’m not sure whether this post is
written by him as no one else know such detailed about my problem.
You are amazing! Thanks!
https://adamex-online.ru
Gates Of Olympus ile büyük kayıplar mı veriyorsunuz?
casino dede oyunu, Pragmatic Play tarafından sunulan sürükleyici bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, efsanevi bir temaya sahiptir. Oyun, Zeus’un büyüleyici dünyasında eşsiz bir macera sunuyor.
Gates of Olympus demo oyna seçeneği ile oyunun temposunu ve özelliklerini önceden deneyimleyebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun farklı özelliklerini ve kazanç sistemini deneyimleyebilirsiniz. Oyunun ana özellikleri arasında çeşitli bonuslar ve yüksek kazanç fırsatları yer alır. Gates of Olympus ile şansınızı deneyin ve büyük ödüllere ulaşın!
Подготовим дипломную работу «под ключ» — от разработки структуры и сбора данных до защиты, обеспечив оригинальность, оформление по ГОСТ, бесплатные доработки и строгое соблюдение дедлайна написание дипломной
http://drogueriazeta.com — compra tus medicinas sin salir de casa.
marketplace for ready-made accounts find accounts for sale
account trading service ready-made accounts for sale
http://www.cityandairportcars.com — explore the best in private car hire and reliable transfers for your trips.
Proven 1xBet casino bonuses: no deposit for registration, free spins, current codes, and promo codes for today https://www.industrialagency.org/blogs/242405/C%C3%B3digo-Promocional-1xBet-Hoy-Bono-VIP-100-hasta-130
Law enforcement training — specialized training for law enforcement professionals in intelligence gathering and analysis.
Gates of Olympus oyununda kayıplar yaşıyorum!
dede kumar oyunu, Pragmatic Play tarafından sunulan heyecan dolu bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, efsanevi bir temaya sahiptir. Oyun, Zeus’un büyüleyici dünyasında eşsiz bir macera sunuyor.
Gates of Olympus demo oyna seçeneği ile stratejinizi oluşturmadan önce deneyim kazanabilirsiniz.
Gates of Olympus oyna demo modunda, oyunun yüksek volatilitesi ve çarpıcı grafikleriyle tanışabilirsiniz. Oyunun ana özellikleri arasında dinamik ödeme sistemi ve büyük ödüller bulunur. Gates of Olympus ile şansınızı deneyin ve büyük ödüllere ulaşın!
Оперативно пишем рефераты под ключ, точно соблюдая методические требования вуза и форматирование, гарантируем высокую оригинальность, бесплатные правки и сдачу в оговорённый срок купить реферат цена
http://www.statonhousefire.com — find out more about Staton House Fire Department’s services, programs, and events.
database of accounts for sale buy account
Pragmatic Play Gates Of Olympus Oyununda Büyük Kayıplar Yaşıyorum!
gates of olympus, Pragmatic Play tarafından sunulan sürükleyici bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, mitolojik bir temaya sahiptir. Oyun, Zeus’un büyüleyici dünyasında eşsiz bir macera sunuyor.
Gates of Olympus demo oyna seçeneği ile oyunun temposunu ve özelliklerini önceden deneyimleyebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun yüksek volatilitesi ve çarpıcı grafikleriyle tanışabilirsiniz. Oyunun ana özellikleri arasında dinamik ödeme sistemi ve büyük ödüller bulunur. Gates of Olympus ile eğlencenin ve kazancın kapılarını aralayın!
http://statonhousefire.com — access the official site for updates on the Staton House Fire Department’s emergency response services.
Мы разрабатываем дипломы«под ключ» — от выбора темы и глубокой аналитики до оригинального текста с проверкой Антиплагиат и бесплатными доработками, строго соблюдая сроки и требования вашего вуза заказать дипломную работу недорого
1win регистрация на официальном сайте http://www.1win10070.ru .
Gates of Olympus oyununda kayıplar yaşıyorum!
gates of olympus oyna, Pragmatic Play tarafından sunulan heyecan dolu bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, mitolojik bir temaya sahiptir. Zeus’un dünyasına giriş yaparak büyük kazançlar elde edebilirsiniz.
Gates of Olympus demo oyna seçeneği ile stratejinizi oluşturmadan önce deneyim kazanabilirsiniz.
Gates of Olympus oyna demo modunda, oyunun yüksek volatilitesi ve çarpıcı grafikleriyle tanışabilirsiniz. Oyunun ana özellikleri arasında çeşitli bonuslar ve yüksek kazanç fırsatları yer alır. Gates of Olympus ile şansınızı deneyin ve büyük ödüllere ulaşın!
Gates of Olympus oyununda kayıplar yaşıyorum!
gates of olympus oyna, Pragmatic Play tarafından sunulan heyecan dolu bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, efsanevi bir temaya sahiptir. Bu oyun, Zeus’un krallığına adım atma fırsatı sunar.
Gates of Olympus demo oyna seçeneği ile stratejinizi oluşturmadan önce deneyim kazanabilirsiniz.
Gates of Olympus oyna demo modunda, oyunun yüksek volatilitesi ve çarpıcı grafikleriyle tanışabilirsiniz. Oyunun ana özellikleri arasında dinamik ödeme sistemi ve büyük ödüller bulunur. Gates of Olympus ile şansınızı deneyin ve büyük ödüllere ulaşın!
find accounts for sale buy account
1win скачать ios http://1win10076.ru/ .
If some one desires expert view on the topic of running a blog after that i recommend
him/her to visit this website, Keep up the nice work.
Look at my web-site … dating con artists
Долгие годы мы готовим дипломные проекты для студентов технических, гуманитарных и экономических вузов, обеспечивая высокую оригинальность заказать дипломную работу недорого
https://easy-remodeling.com/give-your-home-exquisite-exteriors-design-ideas-that-boost-curb-appeal/
https://akril-servis.ru/
бонусный счет 1вин http://www.1win10071.ru .
It is available to all beginners who want to become professional players quelle est le code promo de 1xbet
Pragmatic Play Gates Of Olympus Oyununda Büyük Kayıplar Yaşıyorum!
dede oyunu kumar, Pragmatic Play tarafından sunulan eğlenceli bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, efsanevi bir temaya sahiptir. Oyun, Zeus’un büyüleyici dünyasında eşsiz bir macera sunuyor.
Gates of Olympus demo oyna seçeneği ile stratejinizi oluşturmadan önce deneyim kazanabilirsiniz.
Gates of Olympus oyna demo modunda, oyunun farklı özelliklerini ve kazanç sistemini deneyimleyebilirsiniz. Oyunun ana özellikleri arasında çeşitli bonuslar ve yüksek kazanç fırsatları yer alır. Gates of Olympus ile şansınızı deneyin ve büyük ödüllere ulaşın!
Современный и удобный сайт aerobarcelona.ru на котором легко найти нужную информацию, товары или услуги. Простая навигация, понятный интерфейс и актуальное содержание подойдут как для новых пользователей, так и для постоянной аудитории. Работает быстро, доступен круглосуточно.
мелбет кг http://melbet1012.ru/ .
account marketplace account selling platform
buy and sell accounts https://buy-social-accounts.org/
Gates of Olympus oyununda kayıplar yaşıyorum!
gates of olympus, Pragmatic Play tarafından sunulan heyecan dolu bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, efsanevi bir temaya sahiptir. Bu oyun, Zeus’un krallığına adım atma fırsatı sunar.
Gates of Olympus demo oyna seçeneği ile stratejinizi oluşturmadan önce deneyim kazanabilirsiniz.
Gates of Olympus oyna demo modunda, oyunun heyecan verici mekaniklerini ve dinamik yapısını keşfedebilirsiniz. Oyunun ana özellikleri arasında çok sayıda ücretsiz dönüş ve yüksek kazanç potansiyeli bulunur. Gates of Olympus ile şansınızı deneyin ve büyük ödüllere ulaşın!
Link exchange is nothing else except it is only placing the other person’s website
link on your page at suitable place and other person will also
do same for you.
Pragmatic Play Gates Of Olympus Oyununda Büyük Kayıplar Yaşıyorum!
gate of olympus oyna, Pragmatic Play tarafından sunulan eğlenceli bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, efsanevi bir temaya sahiptir. Oyun, Zeus’un büyüleyici dünyasında eşsiz bir macera sunuyor.
Gates of Olympus demo oyna seçeneği ile stratejinizi oluşturmadan önce deneyim kazanabilirsiniz.
Gates of Olympus oyna demo modunda, oyunun heyecan verici mekaniklerini ve dinamik yapısını keşfedebilirsiniz. Oyunun ana özellikleri arasında çeşitli bonuslar ve yüksek kazanç fırsatları yer alır. Gates of Olympus ile şansınızı deneyin ve büyük ödüllere ulaşın!
Курительная трубка — это не просто способ насладиться табаком, а целый ритуал, требующий внимания к деталям. Чтобы получить максимум удовольствия от процесса, важно подобрать правильные аксессуары: от удобных тамперов до качественных ёршиков и фильтров Подробнее
After entering the promo code, bonuses appear on the balance http://khvoynaya.getbb.ru/viewtopic.php?f=49&t=8880
Навес — практичное решение для тех, кто хочет уберечь автомобиль от солнца, дождя, снега и других капризов погоды, не строя капитальный гараж навесы в москве цена с установкой
Pragmatic Play Gates Of Olympus Oyununda Büyük Kayıplar Yaşıyorum!
dede oyunu, Pragmatic Play tarafından sunulan sürükleyici bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, efsanevi bir temaya sahiptir. Bu oyun, Zeus’un krallığına adım atma fırsatı sunar.
Gates of Olympus demo oyna seçeneği ile oyunun nasıl işlediğini öğrenebilir ve kendinizi geliştirebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun yüksek volatilitesi ve çarpıcı grafikleriyle tanışabilirsiniz. Oyunun ana özellikleri arasında çok sayıda ücretsiz dönüş ve yüksek kazanç potansiyeli bulunur. Gates of Olympus ile büyük kazanç fırsatlarını değerlendirin!
A bandana headband is a versatile and stylish accessory designed to be worn around the head, combining the traditional charm of a bandana with the practicality of a headband. Typically made from soft, breathable materials like cotton or polyester, it features the classic paisley or patterned designs commonly associated with bandanas.
Pragmatic Play Gates Of Olympus Oyununda Büyük Kayıplar Yaşıyorum!
gates of olympus, Pragmatic Play tarafından sunulan heyecan dolu bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, efsanevi bir temaya sahiptir. Oyun, Zeus’un büyüleyici dünyasında eşsiz bir macera sunuyor.
Gates of Olympus demo oyna seçeneği ile oyunun nasıl işlediğini öğrenebilir ve kendinizi geliştirebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun yüksek volatilitesi ve çarpıcı grafikleriyle tanışabilirsiniz. Oyunun ana özellikleri arasında çeşitli bonuslar ve yüksek kazanç fırsatları yer alır. Gates of Olympus ile büyük kazanç fırsatlarını değerlendirin!
Jogo Fortune Dragon – jogue sem apostar . Bônus generosos tornam este slot único . Teste agora em 1Win ! https://plum-cherry-z39cr9.mystrikingly.com/
sell pre-made account sell account
marketplace for ready-made accounts account trading service
When you’re looking for a trusted and exciting online gambling experience
in Australia, **WFGaming** is absolutely one of the leading platforms worth checking out.
With a huge variety of games, valuable bonuses, and strong community support, **WF Gaming Australia** has become a go-to choice among
Aussie players — especially those looking for
extra rewards through no deposit offers.
One of the most attractive features offered by **WFGaming** is their **WFGaming Free**
promotion. This lets first-time users try out real-money games
without needing to make a deposit, which is great for anyone who wants to explore the
platform risk-free. Even better, with **WFGaming Free 365**, you get access to ongoing bonus deals
and seasonal promotions all year round.
Another major advantage is their partnership with **Free Deposit 365**, a well-known site that
shares daily updates on no deposit bonuses and special offers.
Through this collaboration, players can easily stay informed about the latest
**WFGaming Free** opportunities and claim bonuses with just a few clicks.
It’s a smart way to enjoy more playtime without
spending your own money.
Whether you’re into spinning reels, classic games, or virtual casino, **WF
Gaming** offers a smooth and enjoyable experience across all
devices. The user interface is smooth, deposits and withdrawals are secure, and
customer support is fast — everything you need from a modern online gaming platform.
Still unsure where to play, I highly recommend
giving **WFGaming** a try through **Free Deposit 365**. It’s a great
combination for players who want quality, safety, and consistent bonuses.
Don’t miss out on the chance to claim your **WFGaming Free** bonus and get
started today!
Gates of Olympus oyununda kayıplar yaşıyorum!
gates of olympus oyna, Pragmatic Play tarafından sunulan eğlenceli bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, efsanevi bir temaya sahiptir. Oyun, Zeus’un büyüleyici dünyasında eşsiz bir macera sunuyor.
Gates of Olympus demo oyna seçeneği ile oyunun nasıl işlediğini öğrenebilir ve kendinizi geliştirebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun heyecan verici mekaniklerini ve dinamik yapısını keşfedebilirsiniz. Oyunun ana özellikleri arasında dinamik ödeme sistemi ve büyük ödüller bulunur. Gates of Olympus ile büyük kazanç fırsatlarını değerlendirin!
Gates Of Olympus ile büyük kayıplar mı veriyorsunuz?
slot dede oyunu, Pragmatic Play tarafından sunulan eğlenceli bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, efsanevi bir temaya sahiptir. Zeus’un dünyasına giriş yaparak büyük kazançlar elde edebilirsiniz.
Gates of Olympus demo oyna seçeneği ile oyunun temposunu ve özelliklerini önceden deneyimleyebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun heyecan verici mekaniklerini ve dinamik yapısını keşfedebilirsiniz. Oyunun ana özellikleri arasında çeşitli bonuslar ve yüksek kazanç fırsatları yer alır. Gates of Olympus ile şansınızı deneyin ve büyük ödüllere ulaşın!
It�s nearly impossible to find knowledgeable folks about this subject, but you sound like you know what you�re talking about! Thanks
Also visit my website — http://www.smokinstangs.com/member.php/531064-Igoryid
«МиграРостов» оказывает консультационную помощь в решении кадровых и миграционных вопросов, помогая работодателям снижать расходы на персонал и устранять любые кадровые и миграционные риски https://autstaffing-rnd.ru/
To enjoy the atmosphere of a real casino in a virtual environment Explore Dark Sky MГёn the Ultimate Stargazer’s Haven
Finally, what other 1x promotions and bonuses await players código promocional 1xbet venezuela
At the same time, you can use bonus points in a variety of ways comment créer code promo 1xbet
Gates Of Olympus ile büyük kayıplar mı veriyorsunuz?
dede oyunu kumar, Pragmatic Play tarafından sunulan heyecan dolu bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, tanrısal bir temaya sahiptir. Bu oyun, Zeus’un krallığına adım atma fırsatı sunar.
Gates of Olympus demo oyna seçeneği ile oyunun temposunu ve özelliklerini önceden deneyimleyebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun heyecan verici mekaniklerini ve dinamik yapısını keşfedebilirsiniz. Oyunun ana özellikleri arasında çok sayıda ücretsiz dönüş ve yüksek kazanç potansiyeli bulunur. Gates of Olympus ile şansınızı deneyin ve büyük ödüllere ulaşın!
Большой выбор дженериков на сайте https://apteka-russia.ru с доставкой
во все регионы России по выгодным ценам
Gates of Olympus oyununda kayıplar yaşıyorum!
dede oyunu, Pragmatic Play tarafından sunulan eğlenceli bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, mitolojik bir temaya sahiptir. Oyun, Zeus’un büyüleyici dünyasında eşsiz bir macera sunuyor.
Gates of Olympus demo oyna seçeneği ile oyunun temposunu ve özelliklerini önceden deneyimleyebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun yüksek volatilitesi ve çarpıcı grafikleriyle tanışabilirsiniz. Oyunun ana özellikleri arasında çok sayıda ücretsiz dönüş ve yüksek kazanç potansiyeli bulunur. Gates of Olympus ile şansınızı deneyin ve büyük ödüllere ulaşın!
accounts market account buying service
1win скачат 1win скачат .
Pragmatic Play Gates Of Olympus Oyununda Büyük Kayıplar Yaşıyorum!
slot dede oyunu, Pragmatic Play tarafından sunulan heyecan dolu bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, efsanevi bir temaya sahiptir. Zeus’un dünyasına giriş yaparak büyük kazançlar elde edebilirsiniz.
Gates of Olympus demo oyna seçeneği ile stratejinizi oluşturmadan önce deneyim kazanabilirsiniz.
Gates of Olympus oyna demo modunda, oyunun farklı özelliklerini ve kazanç sistemini deneyimleyebilirsiniz. Oyunun ana özellikleri arasında çok sayıda ücretsiz dönüş ve yüksek kazanç potansiyeli bulunur. Gates of Olympus ile şansınızı deneyin ve büyük ödüllere ulaşın!
Gates of Olympus oyununda kayıplar yaşıyorum!
gate of olympus oyna, Pragmatic Play tarafından sunulan sürükleyici bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, tanrısal bir temaya sahiptir. Bu oyun, Zeus’un krallığına adım atma fırsatı sunar.
Gates of Olympus demo oyna seçeneği ile oyunun nasıl işlediğini öğrenebilir ve kendinizi geliştirebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun heyecan verici mekaniklerini ve dinamik yapısını keşfedebilirsiniz. Oyunun ana özellikleri arasında çok sayıda ücretsiz dönüş ve yüksek kazanç potansiyeli bulunur. Gates of Olympus ile eğlencenin ve kazancın kapılarını aralayın!
Geographic Information Systems (GIS) have revolutionized ancient greek catapult
Современные модели также могут включать перколяторы http://sortis.com.ua/naperstky-dlya-kurenyya-kak-v%d1%8bbrat-podhodyashhyj-naperstok/
1win ug http://1win1031.top/ .
промокоды на 1вин промокоды на 1вин .
Gates Of Olympus ile büyük kayıplar mı veriyorsunuz?
casino dede oyunu, Pragmatic Play tarafından sunulan heyecan dolu bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, tanrısal bir temaya sahiptir. Oyun, Zeus’un büyüleyici dünyasında eşsiz bir macera sunuyor.
Gates of Olympus demo oyna seçeneği ile oyunun nasıl işlediğini öğrenebilir ve kendinizi geliştirebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun heyecan verici mekaniklerini ve dinamik yapısını keşfedebilirsiniz. Oyunun ana özellikleri arasında çeşitli bonuslar ve yüksek kazanç fırsatları yer alır. Gates of Olympus ile şansınızı deneyin ve büyük ödüllere ulaşın!
мостбет казино скачать мостбет казино скачать .
account exchange service account exchange service
buy accounts account market
What makes the multiplier bonus so appealing is its unpredictability https://lazosdeamormariano.net/files/pages/index.php?The_Dog_House_Online_Slot_A_TailWagging_Casino_Adventure.html
Mold thrives in damp, humid environments, feeding on materials like wood, drywall, and carpet https://moldweb1.site/
Gates Of Olympus ile büyük kayıplar mı veriyorsunuz?
dede demo oyna, Pragmatic Play tarafından sunulan sürükleyici bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, efsanevi bir temaya sahiptir. Zeus’un dünyasına giriş yaparak büyük kazançlar elde edebilirsiniz.
Gates of Olympus demo oyna seçeneği ile oyunun temposunu ve özelliklerini önceden deneyimleyebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun heyecan verici mekaniklerini ve dinamik yapısını keşfedebilirsiniz. Oyunun ana özellikleri arasında çok sayıda ücretsiz dönüş ve yüksek kazanç potansiyeli bulunur. Gates of Olympus ile eğlencenin ve kazancın kapılarını aralayın!
Hey there! I’ve been following your website for some time now and finally got
the courage to go ahead and give you a shout out from Dallas
Texas! Just wanted to tell you keep up the great job!
The most commonly used types of promotional https://techbuy.ca/image/pgs/sovety_po_prohoghdeniyu_dragon_age_inquisition_issledovanie_igrovogo_mira_vaghnye_mesta_n.html
Gates of Olympus oyununda kayıplar yaşıyorum!
dede kumar oyunu, Pragmatic Play tarafından sunulan eğlenceli bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, mitolojik bir temaya sahiptir. Zeus’un dünyasına giriş yaparak büyük kazançlar elde edebilirsiniz.
Gates of Olympus demo oyna seçeneği ile oyunun temposunu ve özelliklerini önceden deneyimleyebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun farklı özelliklerini ve kazanç sistemini deneyimleyebilirsiniz. Oyunun ana özellikleri arasında çeşitli bonuslar ve yüksek kazanç fırsatları yer alır. Gates of Olympus ile eğlencenin ve kazancın kapılarını aralayın!
Зарабатывай реальные деньги в онлайн казино! Обзоры слотов, бонусы, стратегии для победы! Присоединяйся
Казино онлайн: секреты, тактики, промокоды! Заработай с нами! Только честные обзоры.
https://t.me/s/official_1go_1go/618
I pay a quick visit day-to-day some sites and sites to read articles, but this web site gives quality based
content.
Gates of Olympus oyununda kayıplar yaşıyorum!
dede demo oyna, Pragmatic Play tarafından sunulan sürükleyici bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, tanrısal bir temaya sahiptir. Bu oyun, Zeus’un krallığına adım atma fırsatı sunar.
Gates of Olympus demo oyna seçeneği ile oyunun nasıl işlediğini öğrenebilir ve kendinizi geliştirebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun heyecan verici mekaniklerini ve dinamik yapısını keşfedebilirsiniz. Oyunun ana özellikleri arasında dinamik ödeme sistemi ve büyük ödüller bulunur. Gates of Olympus ile eğlencenin ve kazancın kapılarını aralayın!
Gates Of Olympus ile büyük kayıplar mı veriyorsunuz?
dede demo oyna, Pragmatic Play tarafından sunulan heyecan dolu bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, tanrısal bir temaya sahiptir. Oyun, Zeus’un büyüleyici dünyasında eşsiz bir macera sunuyor.
Gates of Olympus demo oyna seçeneği ile stratejinizi oluşturmadan önce deneyim kazanabilirsiniz.
Gates of Olympus oyna demo modunda, oyunun farklı özelliklerini ve kazanç sistemini deneyimleyebilirsiniz. Oyunun ana özellikleri arasında dinamik ödeme sistemi ve büyük ödüller bulunur. Gates of Olympus ile büyük kazanç fırsatlarını değerlendirin!
I get pleasure from, lead to I discovered just what
I was having a look for. You have ended my four day lengthy hunt!
God Bless you man. Have a nice day. Bye
Today you can get to know a modern tic toc porno
Gates of Olympus oyununda kayıplar yaşıyorum!
dede oyunu, Pragmatic Play tarafından sunulan sürükleyici bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, efsanevi bir temaya sahiptir. Oyun, Zeus’un büyüleyici dünyasında eşsiz bir macera sunuyor.
Gates of Olympus demo oyna seçeneği ile oyunun temposunu ve özelliklerini önceden deneyimleyebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun farklı özelliklerini ve kazanç sistemini deneyimleyebilirsiniz. Oyunun ana özellikleri arasında çeşitli bonuslar ve yüksek kazanç fırsatları yer alır. Gates of Olympus ile eğlencenin ve kazancın kapılarını aralayın!
LuckyPari is a young site created by professionals https://zoomaview.com
лаки джет игра отзывы лаки джет игра отзывы .
social media account marketplace https://accounts-offer.org
account selling service https://accounts-marketplace.xyz/
account purchase buy-best-accounts.org
account purchase https://social-accounts-marketplaces.live/
Gates of Olympus oyununda kayıplar yaşıyorum!
gates of olympus oyna, Pragmatic Play tarafından sunulan heyecan dolu bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, efsanevi bir temaya sahiptir. Bu oyun, Zeus’un krallığına adım atma fırsatı sunar.
Gates of Olympus demo oyna seçeneği ile oyunun nasıl işlediğini öğrenebilir ve kendinizi geliştirebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun yüksek volatilitesi ve çarpıcı grafikleriyle tanışabilirsiniz. Oyunun ana özellikleri arasında çeşitli bonuslar ve yüksek kazanç fırsatları yer alır. Gates of Olympus ile şansınızı deneyin ve büyük ödüllere ulaşın!
скачать 1win на телефон скачать 1win на телефон .
Gates Of Olympus ile büyük kayıplar mı veriyorsunuz?
dede kumar oyunu, Pragmatic Play tarafından sunulan heyecan dolu bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, efsanevi bir temaya sahiptir. Zeus’un dünyasına giriş yaparak büyük kazançlar elde edebilirsiniz.
Gates of Olympus demo oyna seçeneği ile oyunun temposunu ve özelliklerini önceden deneyimleyebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun heyecan verici mekaniklerini ve dinamik yapısını keşfedebilirsiniz. Oyunun ana özellikleri arasında çok sayıda ücretsiz dönüş ve yüksek kazanç potansiyeli bulunur. Gates of Olympus ile şansınızı deneyin ve büyük ödüllere ulaşın!
purchase ready-made accounts https://accounts-marketplace.live
database of accounts for sale https://social-accounts-marketplace.xyz
1mostbet https://mostbet10014.ru/ .
Pragmatic Play Gates Of Olympus Oyununda Büyük Kayıplar Yaşıyorum!
gates of olympus oyna, Pragmatic Play tarafından sunulan sürükleyici bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, efsanevi bir temaya sahiptir. Bu oyun, Zeus’un krallığına adım atma fırsatı sunar.
Gates of Olympus demo oyna seçeneği ile oyunun nasıl işlediğini öğrenebilir ve kendinizi geliştirebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun heyecan verici mekaniklerini ve dinamik yapısını keşfedebilirsiniz. Oyunun ana özellikleri arasında çok sayıda ücretsiz dönüş ve yüksek kazanç potansiyeli bulunur. Gates of Olympus ile eğlencenin ve kazancın kapılarını aralayın!
Бесплатно скачать Виндовс 10 или Windows 11 x64 с лёгкостью Windows 10 скачать
Вам требуется лечение? стоматологические туры в хуньчунь из владивостока лечение хронических заболеваний, восстановление после операций, укрепление иммунитета. Включено всё — от клиники до трансфера и проживания.
https://t.me/s/win1win777win
Домприемка — помощь в приёмке квартир в новостройках контроль ремонта квартиры
Pragmatic Play Gates Of Olympus Oyununda Büyük Kayıplar Yaşıyorum!
gates of olympus, Pragmatic Play tarafından sunulan sürükleyici bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, mitolojik bir temaya sahiptir. Bu oyun, Zeus’un krallığına adım atma fırsatı sunar.
Gates of Olympus demo oyna seçeneği ile oyunun temposunu ve özelliklerini önceden deneyimleyebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun yüksek volatilitesi ve çarpıcı grafikleriyle tanışabilirsiniz. Oyunun ana özellikleri arasında dinamik ödeme sistemi ve büyük ödüller bulunur. Gates of Olympus ile şansınızı deneyin ve büyük ödüllere ulaşın!
I am sure this article has touched all the internet visitors, its really really fastidious piece of writing on building
up new webpage.
If you are interested in a 1xbet promo code for today https://photoclub.canadiangeographic.ca/profile/21593098
ноутбук цена купить ноутбук acer
магазин бытовой электроники магазин бытовой электроники
Gates of Olympus oyununda kayıplar yaşıyorum!
casino dede oyunu, Pragmatic Play tarafından sunulan heyecan dolu bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, mitolojik bir temaya sahiptir. Zeus’un dünyasına giriş yaparak büyük kazançlar elde edebilirsiniz.
Gates of Olympus demo oyna seçeneği ile stratejinizi oluşturmadan önce deneyim kazanabilirsiniz.
Gates of Olympus oyna demo modunda, oyunun yüksek volatilitesi ve çarpıcı grafikleriyle tanışabilirsiniz. Oyunun ana özellikleri arasında çeşitli bonuslar ve yüksek kazanç fırsatları yer alır. Gates of Olympus ile büyük kazanç fırsatlarını değerlendirin!
Hi there it’s me, I am also visiting this web page on a regular basis, this site is in fact fastidious
and the visitors are really sharing pleasant thoughts.
магазин бытовой электроники https://magazin-elektroniki213.ru
Pragmatic Play Gates Of Olympus Oyununda Büyük Kayıplar Yaşıyorum!
slot dede oyunu, Pragmatic Play tarafından sunulan sürükleyici bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, efsanevi bir temaya sahiptir. Zeus’un dünyasına giriş yaparak büyük kazançlar elde edebilirsiniz.
Gates of Olympus demo oyna seçeneği ile oyunun nasıl işlediğini öğrenebilir ve kendinizi geliştirebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun farklı özelliklerini ve kazanç sistemini deneyimleyebilirsiniz. Oyunun ana özellikleri arasında çeşitli bonuslar ve yüksek kazanç fırsatları yer alır. Gates of Olympus ile büyük kazanç fırsatlarını değerlendirin!
мостбет официальный сайт вход букмекерская контора http://mostbet10015.ru/ .
Gates of Olympus oyununda kayıplar yaşıyorum!
dede oyunu kumar, Pragmatic Play tarafından sunulan sürükleyici bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, tanrısal bir temaya sahiptir. Bu oyun, Zeus’un krallığına adım atma fırsatı sunar.
Gates of Olympus demo oyna seçeneği ile stratejinizi oluşturmadan önce deneyim kazanabilirsiniz.
Gates of Olympus oyna demo modunda, oyunun heyecan verici mekaniklerini ve dinamik yapısını keşfedebilirsiniz. Oyunun ana özellikleri arasında dinamik ödeme sistemi ve büyük ödüller bulunur. Gates of Olympus ile eğlencenin ve kazancın kapılarını aralayın!
Hey there just wanted to give you a quick heads up and let you know a few of the images aren’t loading correctly.
I’m not sure why but I think its a linking issue.
I’ve tried it in two different web browsers and both show the same outcome.
1win https://1win1032.top/ .
What i do not understood is in reality how
you are no longer actually much more neatly-preferred than you may
be now. You are so intelligent. You recognize therefore considerably
when it comes to this subject, produced me in my opinion believe
it from so many varied angles. Its like men and women don’t seem to be involved unless it is one thing to do with Woman gaga!
Your individual stuffs excellent. All the time deal with it up!
Pragmatic Play Gates Of Olympus Oyununda Büyük Kayıplar Yaşıyorum!
dede kumar oyunu, Pragmatic Play tarafından sunulan eğlenceli bir slot oyunudur.|Pragmatic Play’in sunduğu Gates of Olympus, tanrısal bir temaya sahiptir. Bu oyun, Zeus’un krallığına adım atma fırsatı sunar.
Gates of Olympus demo oyna seçeneği ile oyunun nasıl işlediğini öğrenebilir ve kendinizi geliştirebilirsiniz.
Gates of Olympus oyna demo modunda, oyunun farklı özelliklerini ve kazanç sistemini deneyimleyebilirsiniz. Oyunun ana özellikleri arasında çok sayıda ücretsiz dönüş ve yüksek kazanç potansiyeli bulunur. Gates of Olympus ile şansınızı deneyin ve büyük ödüllere ulaşın!
account selling service https://accounts-marketplace-best.pro
To receive the bonus, you need to register melbet промокод на фрибет
Everything is very open with a really clear description of the challenges.
It was really informative. Your site is useful.
Many thanks for sharing!
melbet http://melbet1015.ru/ .
Начните свое путешествие с 1xBet уже сегодня промокод 1хбет кз при регистрации
продажа аккаунтов akkaunty-na-prodazhu.pro
биржа аккаунтов маркетплейсов аккаунтов
В интернет магазине https://mob.genmens.ru/ представлен широкий ассортимент дженериков для повышения
потенции производства Индии.Высокое качество по доступным ценам в Санкт-Петербурге и Москве
отправка в другие регионы почтой России.Действуют накопительные скидки для постоянных клентов
гарантированная анонимность заказа.
промокод prodamus promokod-prodam.ru .
Money Men is a 9 episode audio drama https://www.emis.com/php/company-profile/PE/Malaga_-_Webb_Y_Asociados_SRL_en_5452134.html
маркетплейс аккаунтов соцсетей маркетплейсов аккаунтов
маркетплейс аккаунтов соцсетей https://akkaunty-market.live/
мелбет регистрация вход http://melbet1011.ru/ .
mel bet kg melbet1017.ru .
how to bet on 1win how to bet on 1win .
Very good article. I definitely love this website. Thanks!
Since then, though, a new front has opened https://dailytrust.com/unlocking-the-power-of-pdf-word-counting-a-comprehensive-guide/
1win togo https://www.1win1024.top .
маркетплейс аккаунтов akkaunty-optom.live
ГГУ имени Ф.Скорины https://www.gsu.by/ крупный учебный и научно-исследовательский центр Республики Беларусь. Высшее образование в сфере гуманитарных и естественных наук на 12 факультетах по 35 специальностям первой ступени образования и 22 специальностям второй, 69 специализациям.
Кухни на заказ — это идеальное решение для тех, кто хочет создать функциональное и стильное пространство, отражающее индивидуальность https://kuh-doma.ru/
Francisk Skorina https://www.gsu.by Gomel State University. One of the leading academic and scientific-research centers of the Belarus. There are 12 Faculties at the University, 2 scientific and research institutes. Higher education in 35 specialities of the 1st degree of education and 22 specialities.
Hello !!
I came across a 113 very cool platform that I think you should visit.
This site is packed with a lot of useful information that you might find insightful.
It has everything you could possibly need, so be sure to give it a visit!
https://www.gamespace.com/all-articles/news/benefits-of-video-games-for-adults/
SHOTO SHOP — це онлайн-магазин, який пропонує широкий асортимент товарів для повсякденного використання та оригінальних подарунків на будь-який випадок Читать
Алкогольные напитки купить с доставкой за 60 минут https://salda.ws/f/topic.php?f=5&t=92914
биржа аккаунтов https://kupit-akkaunt.online
Create vivid images with Promptchan AI — a powerful neural network for generating art based on text description. Support for SFW and NSFW modes, style customization, quick creation of visual content.
Портал о недвижимости https://akadem-ekb.ru всё, что нужно знать о продаже, покупке и аренде жилья. Актуальные объявления, обзоры новостроек, советы экспертов, юридическая информация, ипотека, инвестиции. Помогаем выбрать квартиру или дом в любом городе.
1win casino 1win casino .
мелбет вход зеркало https://melbet1018.ru .
1win minimum deposit http://1win1029.top/ .
The famous virtual casino «Kometa» recommends all fans http://e-kafstires.gr/kafstires/thermoydravlikos/index.php?option=com_k2&view=itemlist&task=user&id=289025
Срочные займы сразу на карту, Займы по акции без процентов, малоизвестные и новые МФО Где сейчас взять займ
цветы в букете салон цветов
https://xn--80atbkennd.xn--80adxhks
Ищете копирайтера? https://sajt-kopirajtera.ru/jandeks-uslugi-prodvizhenie-profilja/ Пишу тексты, которые продают, вовлекают и объясняют. Создам контент для сайта, блога, рекламы, каталога. Работаю с ТЗ, разбираюсь в SEO, адаптирую стиль под задачу. Чистота, смысл и результат — мои приоритеты. Закажите текст, который работает на вас.
Архитектурные решения https://топдом-мск.рф под ваши желания и участок. Создадим проект с нуля: планировка, фасад, инженерия, визуализация. Вы получите эксклюзивный дом, адаптированный под ваш образ жизни. Работаем точно, качественно и с любовью к деталям.
buy facebook accounts https://buy-adsaccounts.work
facebook account buy https://buy-ad-account.top
buy fb account https://buy-ad-accounts.click
1win букмекерская контора скачать http://www.1win22002.ru .
Туристический портал https://prostokarta.com.ua для путешественников: маршруты, достопримечательности, советы, бронирование туров и жилья, билеты, гайды по странам и городам. Планируйте отпуск легко — всё о путешествиях в одном месте.
Инновации, технологии, наука https://technocom.dp.ua на одном портале. Читайте о передовых решениях, новых продуктах, цифровой трансформации, робототехнике, стартапах и будущем IT. Всё самое важное и интересное из мира высоких технологий в одном месте — просто, понятно, актуально.
Всё о мобильной технике https://webstore.com.ua и технологиях: смартфоны, планшеты, гаджеты, новинки рынка, обзоры, сравнения, тесты, советы по выбору и настройке. Следите за тенденциями, обновлениями ОС и инновациями в мире мобильных устройств.
Натяжные потолки под ключ https://vc.ru/id4737932/1977920-natyazhnye-potolki-mify-o-vrede установка любых видов: матовые, глянцевые, сатиновые, многоуровневые, с фотопечатью и подсветкой. Широкий выбор фактур и цветов, замер бесплатно, монтаж за 1 день. Качественные материалы, гарантия и выгодные цены от производителя.
YouTube Promotion buy youtube views for your videos and increase reach. Real views from a live audience, quick launch, flexible packages. Ideal for new channels and content promotion. We help develop YouTube safely and effectively.
Портал про авто https://livecage.com.ua всё для автолюбителей: обзоры машин, тест-драйвы, новости автопрома, советы по ремонту и обслуживанию. Выбор авто, сравнение моделей, тюнинг, страховка, ПДД. Актуально, понятно и полезно. Будьте в курсе всего, что связано с автомобилями!
Вибравши відповідні будівельні
інформацію в мережі у Львові, https://th-gatne.com.ua/yak-vybraty-yakisnu-zvarnu-oczynkovanu-trubu/ можна починати проведення ремонту.
Современный женский портал https://beautyrecipes.kyiv.ua стиль жизни, мода, уход за собой, семья, дети, кулинария, карьера и вдохновение. Полезные советы, тесты, статьи и истории. Откровенно, интересно, по-настоящему. Всё, что важно и близко каждой женщине — в одном месте.
На женском портале https://happytime.in.ua статьи для души и тела: секреты красоты, женское здоровье, любовь и семья, рецепты, карьерные идеи, вдохновение. Место, где можно быть собой, делиться опытом и черпать силу в заботе о себе.
Ты можешь всё https://love.zt.ua а мы подскажем, как. Женский портал о саморазвитии, личной эффективности, карьере, балансе между семьёй и амбициями. Здесь — опыт успешных женщин, практичные советы и реальные инструменты для роста.
Добро пожаловать на женский портал https://lidia.kr.ua ваш гид по миру красоты, стиля и внутренней гармонии. Читайте про отношения, карьеру, воспитание детей, женское здоровье, эмоции и моду. Будьте вдохновлены лучшей версией себя каждый день вместе с нами.
Женский онлайн-журнал https://loveliness.kyiv.ua о стиле, красоте, вдохновении и трендах. Интервью, мода, бьюти-обзоры, психология, любовь и карьера. Будь в курсе главного, читай мнения экспертов, следи за трендами и открывай новые грани себя каждый день.
1win http://1win22003.ru/ .
продажа криптовалюты продажа криптовалюты .
buying facebook ad account https://ad-account-buy.top
buy facebook profile cheap facebook account
Сайт для женщин https://womenclub.kr.ua всё, что волнует и вдохновляет: мода, красота, здоровье, отношения, дети, психология и карьера. Практичные советы, интересные статьи, вдохновение каждый день. Онлайн-пространство, созданное с заботой о вас и вашем настроении.
Медицинский портал https://lpl.org.ua с проверенной информацией от врачей: симптомы, заболевания, лечение, диагностика, препараты, ЗОЖ. Консультации специалистов, статьи, тесты и новости медицины. Только достоверные данные — без паники и домыслов. Здоровье начинается с знаний.
Надёжный медицинский портал https://una-unso.cv.ua созданный для вашего здоровья и спокойствия. Статьи о заболеваниях, советы по лечению и образу жизни, подбор клиник и врачей. Понятный язык, актуальная информация, забота о вашем самочувствии — каждый день.
Кулинарный портал https://mallinaproject.com.ua тысячи рецептов, пошаговые инструкции, фото, видео, удобный поиск по ингредиентам. Готовьте вкусно и разнообразно: от завтраков до десертов, от традиционной кухни до кулинарных трендов. Быстро, доступно, понятно!
Современный мужской портал https://smart4business.net о жизни, успехе и саморазвитии. Личный рост, инвестиции, бизнес, стиль, технологии, мотивация. Разбираем стратегии, делимся опытом, вдохновляем на движение вперёд. Для тех, кто выбирает силу, разум и результат.
buy facebook ad account buy a facebook account
Актуальные новости https://polonina.com.ua каждый день — политика, экономика, культура, спорт, технологии, происшествия. Надёжный источник информации без лишнего. Следите за событиями в России и мире, получайте факты, мнения и обзоры.
Следите за трендами автопрома https://viewport.com.ua вместе с нами! На авто портале — новинки, презентации, обзоры, технологии, электромобили, автосалоны и экспертные мнения. Ежедневные обновления, честный взгляд на рынок, без лишнего шума и рекламы.
Rich set of features, mechanics that take gamification, multiplayer and loyalty to the next level SEO BACKLINKS, CROSS-LINKS, HACKED WP-ADMIN — TELEGRAM @SEO_ANOMALY
1win bet oficial http://1win5079.ru .
Сайт для женщин https://funtura.com.ua всё, что интересно каждый день: бьюти-советы, рецепты, отношения, дети, стиль, покупки, лайфхаки и настроение. Яркие статьи, тесты и вдохновение. Просто, легко, по-женски.
Информационно-познавательный https://golosiyiv.kiev.ua портал для мужчин и женщин: полезные статьи, советы, обзоры, лайфхаки, здоровье, психология, стиль, семья и финансы. Всё, что важно знать для жизни, развития и комфорта. Читайте, развивайтесь, вдохновляйтесь вместе с нами.
виды натяжных потолков https://natyazhnye-potolki-moskva1.ru
1win https://www.1win22018.ru .
Apply for a visa online or at one of our offices http://astravel.ru/portal/publikacii/284-oformlenie-vizy-za-granicu.html
Сильная, умная, стильная https://lugor.org.ua вот для кого наш женский онлайн-журнал. Темы: мода, карьера, дети, отношения, дом, здоровье. Разговор о реальной жизни: без глянца, но со вкусом.
Женский онлайн-журнал https://gorod-lubvi.com.ua о красоте, стиле и уходе. Советы визажистов, подбор образов, секреты молодости, модные тренды. Всё, чтобы чувствовать себя уверенно и выглядеть на миллион. Будь в курсе, вдохновляйся и подбирай стиль по душе.
Женский онлайн-журнал https://inclub.lg.ua о силе выбора. Карьера, финансы, тайм-менеджмент, уверенность, стиль и баланс. Для женщин, которые двигаются вперёд, строят, влияют, мечтают. Говорим по делу — без стереотипов и с уважением к вашему пути.
cheap facebook accounts https://ad-accounts-for-sale.work
buy google ads accounts https://buy-ads-accounts.click
Портал для женщин https://prettiness.kyiv.ua которые любят жизнь во всех её красках. Советы, мода, рецепты, отношения, вдохновение, дом и путешествия. Каждый день — новая идея, интересная мысль и повод улыбнуться.
Портал для активных https://onlystyle.com.ua стильных, современных женщин. Мода, карьера, здоровье, бьюти-тренды, фитнес, лайфхаки, вдохновение. Будь в курсе, живи ярко, выбирай смело. Никаких скучных статей — только драйв, стиль и реальная польза.
Модный журнал https://psilocybe-larvae.com всё о стиле, трендах, бьюти-новинках, звёздах и вдохновении. Образы с подиумов, советы стилистов, актуальные коллекции, мода улиц и мировые бренды.
1 win контора http://www.1win22020.ru .
The tourism business is one of the most attractive business areas https://freesmi.by/raznoe/379981
Профессиональный массаж Ивантеевка: для спины, шеи, поясницы, при остеохондрозе и сколиозе. Медицинский и спортивный подход, опытные специалисты, точечное воздействие. Снятие болей, восстановление подвижности, улучшение самочувствия.
Онлайн-портал для женщин https://rpl.net.ua всё о жизни, стиле, здоровье, отношениях, карьере, детях, красоте и вдохновении. Полезные статьи, советы, идеи и актуальные темы.
Женский онлайн-портал https://sweaterok.com.ua это не просто сайт, а поддержка в повседневной жизни. Честные темы, важные вопросы, советы и тепло. От эмоций до материнства, от тела до мыслей.
Онлайн-журнал для женщин https://tiamo.rv.ua которые ищут баланс. Психология, эмоции, отношения, самоценность, женское здоровье. Честные тексты, поддержка, путь к себе. Пространство, где можно дышать глубже, читать с удовольствием и чувствовать, что тебя понимают.
Женский онлайн-журнал https://trendy.in.ua о выборе, деньгах, успехе и личных целях. Как совмещать карьеру и семью, строить бизнес, говорить «нет» и заботиться о себе. Истории, советы, интервью, вдохновение. Для тех, кто идёт вперёд — в своих темпах и с опорой на себя.
Онлайн фитнес-журнал https://bahgorsovet.org.ua полезные статьи от тренеров и нутрициологов: программы тренировок, восстановление, питание, биомеханика, анализ ошибок. Говорим на языке результата. Научный подход без воды — для тех, кто ценит эффективность.
Всё о лечении диабета https://diabet911.com типы заболевания, симптомы, диагностика, питание, образ жизни и лекарственная терапия. Объясняем просто и понятно. Актуальная информация, советы врачей, статьи для пациентов и близких.
1вин кз скачать 1вин кз скачать .
помощь в написании диплома сайты для написания диплома
сколько стоит реферат на заказ написать реферат на заказ
Сайт о здоровье глаз https://eyecenter.com.ua полезные статьи, советы офтальмологов, симптомы заболеваний, диагностика, лечение, упражнения для зрения. Всё о профилактике, коррекции, очках, линзах и современных методах восстановления.
Сайт для женщин https://expertlaw.com.ua которые любят моду, красоту и стильную жизнь. Актуальные тренды, советы по уходу, подбор образов, вдохновляющие идеи для гардероба и макияжа.
buy google ads agency account google ads account for sale
1win игра 1win игра .
fantastic putting altogether, you just won a new reader. What might you recommend about your that you just made some days ago? Any sure
Review my web site http://Vn-Info.net/user/Veronasqh/
despite of any difficulties, the Velodrome has become stronger
due to continued attention to two basic principles: development of the core technologies of the Velodrome finance of the Velodrome, and the introduction of the best protocols into the.
70918248
References:
bodybuilding testosteron vom arzt (https://stage.tripee.fr/employer/dht-testosteron/)
google ads account for sale https://buy-account-ads.work
buy google ads threshold accounts google ads reseller
Сайт о мужском здоровье https://kakbog.com достоверная информация о гормональном фоне, потенции, урологических проблемах, профилактике, питании и образе жизни. Советы врачей, диагностика, лечение, препараты.
Современный медицинский портал https://medfactor.com.ua с упором на технологии: телемедицина, онлайн-запись, цифровые карты, расшифровка анализов, подбор препаратов. Удобный доступ к информации и поддержка на всех этапах — от симптомов до выздоровления.
mostbet скачат https://mostbet22005.ru/ .
70918248
References:
https://empleos.getcompany.co/employer/die-besten-testosteron-tabletten/
Кулинарные рецепты https://kulinaria.com.ua на каждый день и для особых случаев. Домашняя выпечка, супы, салаты, десерты, блюда из мяса и овощей. Простые пошаговые инструкции, доступные ингредиенты и душевные вкусы.
Мужской портал https://realman.com.ua всё, что интересно и полезно: спорт, здоровье, стиль, авто, отношения, технологии, карьера и отдых. Практичные советы, обзоры, мнения и поддержка.
Сайт для мужчин https://phizmat.org.ua всё о жизни с характером: здоровье, спорт, стиль, авто, карьера, отношения, технологии. Полезные советы, обзоры, мужской взгляд на важные темы.
id=»firstHeading» class=»firstHeading mw-first-heading»>Search results
Help
English
Tools
Tools
move to sidebar hide
Actions
General
Новостной портал https://sensus.org.ua главные события дня в России и мире. Политика, экономика, общество, культура, спорт и технологии. Только проверенные факты, оперативные сводки, мнения экспертов и честная подача.
медицинский портал https://pobedilivmeste.org.ua с удобной навигацией и актуальной информацией. Болезни, симптомы, приёмы врачей, анализы, исследования, препараты и рекомендации.
1win.kg 1win.kg .
займ онлайн бесплатно получить займ
Noten vom klavier musik noten klavier
buy google ads accounts https://buy-verified-ads-account.work
buy verified business manager https://buy-business-manager.org/
buy old google ads account https://ads-agency-account-buy.click
лига ставок мобильная версия скачать лига ставок мобильная версия скачать .
как потратить бонусы в 1win http://www.1win22008.ru .
Как бы то ни было, квартира простояла пустой и запечатанной только неделю, а затем в нее вселились – покойный Берлиоз с супругой и этот самый Степа тоже с супругой. нотариально заверенный перевод что это Отставной втируша-регент сидел на том самом месте, где сидел еще недавно сам Иван Николаевич.
оформить займ микрозайм онлайн
И тотчас рука его скользнула и сорвалась, нога неудержимо, как по льду, поехала по булыжнику, откосом сходящему к рельсам, другую ногу подбросило, и Берлиоза выбросило на рельсы. как сделать перевод паспорта Пилат накинул капюшон на свою чуть лысеющую голову и начал разговор.
Официанты, торопясь, срывали скатерти со столов. перевод с заверением Придя, был встречен домработницей Груней, которая объяснила, что сама она только что пришла, что она приходящая, что Берлиоза дома нет, а что если визитер желает видеть Степана Богдановича, то пусть идет к нему в спальню сам.
Ноты онлайн для фортепиано песни на пианино по нотам
Экскурсии на авто индивидуальный гид по Калининграду на машине для вашего удобства.
И когда этот момент наступил, прокуратор выбросил вверх правую руку, и последний шум сдуло с толпы. перевод документов нотариально заверенный Получив ответ, что это – Вар-равван, прокуратор сказал: – Очень хорошо, – и велел секретарю тут же занести это в протокол, сжал в руке поднятую секретарем с песка пряжку и торжественно сказал: – Пора! Тут все присутствующие тронулись вниз по широкой мраморной лестнице меж стен роз, источавших одуряющий аромат, спускаясь все ниже и ниже к дворцовой стене, к воротам, выводящим на большую, гладко вымощенную площадь, в конце которой виднелись колонны и статуи ершалаимского ристалища.
unlimited bm facebook buy-business-manager-acc.org
Он знал, что теперь у него за спиною на помост градом летят бронзовые монеты, финики, что в воющей толпе люди, давя друг друга, лезут на плечи, чтобы увидеть своими глазами чудо – как человек, который уже был в руках смерти, вырвался из этих рук! Как легионеры снимают с него веревки, невольно причиняя ему жгучую боль в вывихнутых на допросе руках, как он, морщась и охая, все же улыбается бессмысленной сумасшедшей улыбкой. инструменты для самостоятельного продвижения сайта Тут, как вполне понятно, под липами наступило молчание.
Так вот требуется, чтобы я их разобрал. продвижение в яндекс директ самостоятельно сайта Скатившись с этого откоса, он запрыгал по булыжникам Бронной.
– Этого еще недоставало!» И тут Степины мысли побежали уже по двойному рельсовому пути, но, как всегда бывает во время катастрофы, в одну сторону и вообще черт знает куда. самостоятельной раскрутке сайта Тут ему так ударило в голову, что он закрыл глаза и застонал.
В течение ее полета в светлой теперь и легкой голове прокуратора сложилась формула. продвижение сайтов самостоятельно пошаговая В этой голове гудел тяжелый колокол, между глазными яблоками и закрытыми веками проплывали коричневые пятна с огненно-зеленым ободком, и в довершение всего тошнило, причем казалось, что тошнота эта связана со звуками какого-то назойливого патефона.
«Вот пример настоящей удачливости… – тут Рюхин встал во весь рост на платформе грузовика и руку поднял, нападая зачем-то на никого не трогающего чугунного человека, – какой бы шаг он ни сделал в жизни, что бы ни случилось с ним, все шло ему на пользу, все обращалось к его славе! Но что он сделал? Я не постигаю… Что-нибудь особенное есть в этих словах: „Буря мглою…“? Не понимаю!. вордпресс программа для создания сайтов – Но, – продолжал иноземец, не смущаясь изумлением Берлиоза и обращаясь к поэту, – отправить его в Соловки невозможно по той причине, что он уже с лишком сто лет пребывает в местах значительно более отдаленных, чем Соловки, и извлечь его оттуда никоим образом нельзя, уверяю вас! – А жаль! – отозвался задира-поэт.
1win vk http://1win22023.ru/ .
дипломная работа на заказ стоимость диплом написать
А ну, давайте вместе! Разом! – и тут регент разинул пасть. создание сайта на wordpress пример Пилат прогнал эту мысль, и она улетела в одно мгновение, как и прилетела.
Greetings, I would like to subscribe for this webpage to obtain most up-to-date updates, therefore where can i do it amuse assist.
my homepage http://www.postcount.net/forum/member.php?115945-znatalieyndextz1148
Ресурс автоматического обмена линками с крутым выхлопом, регайся сегодня!
Повезло, повезло! – вдруг ядовито заключил Рюхин и почувствовал, что грузовик под ним шевельнулся. бюро переводов с нотариальным заверением в марьино – Меры вот какие.
HappyGranny. Guys if you wаnt to get latest info about our services and new options add me to your contact list + subscribe on our channe SEO BACKLINKS, BLACK-LINKS, TRAFFIC BOOST, LINK INDEXING – TELEGRAM @SEO_ANOMALY
скачать мостбет на телефон https://www.mostbet22010.ru .
– На свете не было, нет и не будет никогда более великой и прекрасной для людей власти, чем власть императора Тиверия! – сорванный и больной голос Пилата разросся. бюро переводов нотариальное заверение документов Согласно закону, согласно обычаю, одного из этих двух преступников нужно будет отпустить на свободу в честь наступающего сегодня великого праздника Пасхи.
1вин зеркало вход 1win22027.ru .
машину на день на прокат аренда авто на сутки
Thanks for the marvelous posting! I genuinely enjoyed reading it,
you happen to be a great author.I will remember to bookmark
your blog and definitely will come back in the foreseeable future.
I want to encourage that you continue your great work,
have a nice afternoon!
win1 https://www.1win22025.ru .
аренда автомобиля стоимость сутки аренда машины посуточно
id mostbet com id mostbet com .
facebook bm account https://business-manager-for-sale.org/
И тотчас рука его скользнула и сорвалась, нога неудержимо, как по льду, поехала по булыжнику, откосом сходящему к рельсам, другую ногу подбросило, и Берлиоза выбросило на рельсы. нотариальная контора с переводом паспорта Брови на надменном лице поднялись, прокуратор прямо в глаза поглядел первосвященнику с изумлением.
Да нечего так на меня смотреть! Верно говорю! Все видел – и балкон, и пальмы. перевод паспорта с нотариальным заверением цена рядом со мной Очертил Бездомный главное действующее лицо своей поэмы, то есть Иисуса, очень черными красками, и тем не менее всю поэму приходилось, по мнению редактора, писать заново.
аренда машины цена аренда авто автомобиль
– Нарзану нету, – ответила женщина в будочке и почему-то обиделась. перевод паспорта иностранного гражданина нотариальный цены Второй – плечистый, рыжеватый, вихрастый молодой человек в заломленной на затылок клетчатой кепке – был в ковбойке, жеваных белых брюках и в черных тапочках.
Плясали: Драгунский, Чердакчи, маленький Денискин с гигантской Штурман Жоржем, плясала красавица архитектор Семейкина-Галл, крепко схваченная неизвестным в белых рогожных брюках. eram vivus moriens tua mors Более того: тут же расписка Воланда о том, что он эти десять тысяч уже получил! «Что же это такое?!» – подумал несчастный Степа, и голова у него закружилась.
When selecting the right climate control solutions for residential or commercial spaces Online course – SEO for gambling in Turkey. TG – @helena_kaya
– Может быть, вы знаете, какой именно, – с совершенно естественной иронией осведомился Берлиоз, вовлекаясь в какой-то действительно нелепый разговор, – и скажете мне? – Охотно, – отозвался незнакомец. В самом деле, ведь не спросишь же его так: «Скажите, заключал ли я вчера с профессором черной магии контракт на тридцать пять тысяч рублей?» Так спрашивать не годится! – Да! – послышался в трубке резкий, неприятный голос Римского.
Играешь в Fallout 76? Хочешь купить шмот Fallout 76? Широкий ассортимент предметов, включая силовую броню, легендарное оружие, хлам, схемы и многое другое для Fallout 76 на PC, Xbox и PlayStation. Мы предлагаем услуги буста, прокачки персонажа и готовые комплекты снаряжения.
А на тебя в особенности, гнида! – отнесся он отдельно к Рюхину. фильтр воздушный haval h6 1 5 В коридоре было темно.
– А не надо никаких точек зрения, – ответил странный профессор. 1698684 ford фильтр воздушный Брюнет.
– О, я вообще полиглот и знаю очень большое количество языков, – ответил профессор. Светало, и свет еще не погашенных на шоссе фонарей был уже не нужен и неприятен.
Настроение духа у едущего было ужасно. воздушный фильтр nissan note купить – И доказательств никаких не требуется, – ответил профессор и заговорил негромко, причем его акцент почему-то пропал: – Все просто: в белом плаще… В белом плаще с кровавым подбоем, шаркающей кавалерийской походкой, ранним утром четырнадцатого числа весеннего месяца нисана в крытую колоннаду между двумя крыльями дворца Ирода Великого вышел прокуратор Иудеи Понтий Пилат.
buy facebook bm https://buy-business-manager-accounts.org
tiktok ads account buy https://buy-tiktok-ads-account.org
tiktok ad accounts https://tiktok-ads-account-buy.org
lucky jet бонусы lucky jet бонусы .
И вот проклятая зелень перед глазами растаяла, стали выговариваться слова, и, главное, Степа кое-что припомнил. Нет, я категорически против «Колизея», – гремел на весь бульвар гастроном Амвросий.
А профессор тотчас же как будто выздоровел и посветлел. Разве я похож на слабоумного? – О да, ты не похож на слабоумного, – тихо ответил прокуратор и улыбнулся какой-то страшной улыбкой, – так поклянись, что этого не было.
– Браво! Вы полностью повторили мысль беспокойного старика Иммануила по этому поводу. А второй, женский, испуганный, произнес слова: – Как же милиция-то пропустила его по улицам в таком виде? Это Иван Николаевич услыхал и отозвался: – Дважды хотели задержать, в Скатертном и здесь, на Бронной, да я махнул через забор и, видите, щеку изорвал! – Тут Иван Николаевич поднял свечу и вскричал: – Братья во литературе! (Осипший голос его окреп и стал горячей.
дренаж участка спб цена https://drenazh-uchastka-1122.ru .
1хставка вход 1хставка вход .
На diabloshop.ru вы можете купить https://diabloshop.ru/gajdy-diablo-2-resurrected/ золото Diablo 4, руны Diablo 2 Resurrected, а также уникальные предметы и легендарное снаряжение для всех платформ — PC, Xbox, PlayStation и Nintendo Switch. Мы предлагаем быстрый буст персонажа, услуги прокачки, сбор лучших билдов и готовые комплекты снаряжения.
Не будь Рюхин так истерзан в клинике и на грузовике, он, наверно, получил бы удовольствие, рассказывая о том, как все было в лечебнице, и украшая этот рассказ выдуманными подробностями. номер webbankir телефона горячей линии Ведь вы не знаете города… План Берлиоза следует признать правильным: нужно было добежать до ближайшего телефона-автомата и сообщить в бюро иностранцев о том, что вот, мол, приезжий из-за границы консультант сидит на Патриарших прудах в состоянии явно ненормальном.
Играешь в Fallout 76? Хочешь легендарное оружие Fallout 76? Широкий ассортимент предметов, включая силовую броню, легендарное оружие, хлам, схемы и многое другое для Fallout 76 на PC, Xbox и PlayStation. Мы предлагаем услуги буста, прокачки персонажа и готовые комплекты снаряжения.
Задыхаясь, он обратился к регенту: – Эй, гражданин, помогите задержать преступника! Вы обязаны это сделать! Регент чрезвычайно оживился, вскочил и заорал: – Который преступник? Где он? Иностранный преступник? – Глазки регента радостно заиграли: – Этот? Ежели он преступник, то первым долгом следует кричать: «Караул!» А то он уйдет. – Простите… – прохрипел Степа, чувствуя, что похмелье дарит его новым симптомом: ему показалось, что пол возле кровати ушел куда-то и что сию минуту он головой вниз полетит к чертовой матери в преисподнюю.
— А ежели заключали, так он должен был пройти через бухгалтерию? — Всенепременно, — отвечал, волнуясь, Василий Степанович. цена на москитные сетки на пластиковые окна Ненамного, а интересы уже другие.
калининград экскурсии по городу экскурсии по калининграду и калининградской области
— Как?! — в свою очередь крикнул Иван. как снять москитную сетку с пластикового окна на балконе Подумаешь, розовые трусики видно, и что? На пляже так вообще в сто раз меньше надевают, почти всё открыто – и ничего, не смущаются.
Контроль расходов, исключение «человеческого фактора» и рост среднего чека — проверенные решения для вашего бизнеса кассовая программа для кафе
Ao coletar duas ou mais recompensas de cartões tesouros, https://www.nationwidejobrecruiter.com/betlable/descubra-o-melhores-online-casino-portugal-para/ você tem a opção Obter um super bônus de até 300 shark spins.
tiktok ad accounts tiktok agency account for sale
buy tiktok ad account https://buy-tiktok-ad-account.org
buy tiktok ads https://tiktok-agency-account-for-sale.org
tiktok agency account for sale https://buy-tiktok-ads-accounts.org
Прозвучала длинная команда, воины приказали нарядным гостям забраться в паланкины, и процессия тронулась в путь. замена уплотнителей на окнах отзывы Трое черных коней храпели у сарая, вздрагивали, взрывали фонтанами землю.
Пора вам к ней, она ждёт. замена уплотнителя на пластиковых окнах зеленоград Вдруг ему представится, что эти целомудренные руки когда-нибудь обовьются вокруг его шеи, что эти гордые губы ответят на его поцелуи, что эти умные глаза с нежностью — да, с нежностью остановятся на его глазах, и голова его закружится, и он забудется на миг, пока опять не вспыхнет в нем негодование.
Ишь, как обрадовался!». ремонт окон в москве москитные сетки – А ключа у тебя нет, – ядовито заметил Тимур.
юрист по семейным делам развод юрист по семейным делам спб
Так сказал Борун, не разрешив мальчишке отходить от Тринса. фото как сделать москитную сетку на пластиковое окно Да ещё сегодняшний поход в катакомбы сорвался – и опять из-за Славкиного характера! Ну, немножко, совсем немножко, капелюшечку самую злился Тимур из-за чёртовой катушки, на которую надо собирать шпагат! Да ещё меч выскользнул на пол! Подняв его, мальчишка крикнул: – Нету чудес, нету, нету, нету! Были бы, то для всех! Всегда! – И наотмашь рубанул стену, отводя душу.
судебное заявление о взыскании задолженности взыскание задолженности в суде услуги
– Ты, сын бога, думай быстрее. москитная сетка антикошка в рулоне купить Ждан зычно скомандовал недорослям: – Кончай глазеть! По росту становись, – и бросил Славке.
New players receive a 100% first deposit bonus https://bookmarkspy.com/story21012827/1xbet-promo-code-india
Тут же стояли, ловя нестойкую тень, и скучали коноводы, державшие присмиревших лошадей. москитная сетка на пластиковые окна изготовление Она уже остановилась хорошеть, ничего не обещала больше того, что в ней было; но и этого было достаточно.
скачать 1win на телефон официальный сайт андроид 1win22029.ru .
бонус на казино 1win https://1win22030.ru .
It�s hard to find well-informed individuals in this particular subject, but you sound like you know what you�re talking about! Thanks
Feel free to visit my site — http://forum.d-dub.com/member.php?898650-Sergtso
устройство дренажа на участке спб http://www.drenazh-uchastka-1122.ru .
Но самые близкие люди смотрели, как на больного! Не верили! Ни единому слову! С таким отношением мальчишка не мог смириться. москитная сетка антипыльца в рулонах И, пожалуй, ведь все-таки лицо.
70918248
References:
anabolic steroids pill form (http://www.tdx001.com/home.php?mod=space&uid=149210)
Давайте! Она заткнула рану ватой, прижала пальцем и принялась наматывать бинт. как сделать москитную сетку на пластиковое окно самому Сразу в центр лабиринта.
Гул нарастал. москитные сетки на пластиковые окна в ростове на дону купить И очень знакомо: – Далеко ли путь де’ъжите? – Здравствуйте, ачарья Мер, – поклонилась Милана.
Сокол посоветовал перетаскивать и перекидывать камни, что кучей валялись у казармы. цена замены уплотнителя на окнах пвх Русалки поняли, с хрустальным смехом стремительно потащили к поверхности, снова подбросили в воздух.
– С твоими амулетами, Олен, не очень понятно. мастер по ремонту окон пвх москва Маргарита летела беззвучно, очень медленно и невысоко, примерно на уровне второго этажа.
New players receive a 100% first deposit bonus up to €130 for sports betting https://webhitlist.com/profiles/blogs/c-digo-promocional-apuesta-gratis-1xbet-bono-130-1
Познакомившись с каждым, выбрал Славку, забрался к нему на колени, свернулся клубком. вакансии ремонт окон пвх в москве Пелагея Даниловна, распорядившись очисткой места для гостей и угощениями для господ и дворовых, не снимая очков, с сдерживаемой улыбкой, ходила между ряжеными, близко глядя им в лица и никого не узнавая.
Я им отмечаю место, где работаю с силой, не больше. купить москитную сетку для окна пластиковые Сквозь дырки между чурками наблюдать оказалось удобно и безопасно.
Discover create porn, a platform where artificial intelligence makes your desires come true. Create your perfect AI heroines, chat in real time, and enjoy personalized content tailored to your tastes. The next level of sex technology is here.
Металлические ограждения https://osk-stroi.ru для дома, дачи, промышленных и общественных объектов. Качественные материалы, долговечность, устойчивость к коррозии. Быстрая установка и индивидуальное изготовление под заказ.
tiktok ads account buy buy tiktok ads
buy tiktok business account tiktok ads account for sale
Инвестиции в строительство https://permgragdanstroy.ru жилой и коммерческой недвижимости. Прибыльные проекты, прозрачные условия, сопровождение на всех этапах. Участвуйте в строительстве с гарантированной доходностью.
Betting specials with enhanced odds, and cashout functionality for full https://theomnibuzz.com/———1xbet——————100——32500—
We combine expert experience and GPT capabilities to quickly prepare SEO BACKLINKS, CROSS-LINKS, HACKED WP-ADMIN — TELEGRAM @SEO_ANOMALY
Агентство недвижимости https://assa-dom.ru покупка, продажа, аренда квартир, домов, участков и коммерческих объектов. Полное сопровождение сделок, помощь с ипотекой, юридическая поддержка. Надежно, удобно, профессионально.
как потратить бонусы 1вин https://1win3007.ru .
Discover everything you need to know about renting a car in Dubai. Learn about the requirements, traffic rules, parking options, and how to avoid fines http://www.askmap.net/location/7382573/uae/yeti-car-rental
In cases like this, the advantage signal supplies a 30% boost https://faceout.mn.co/posts/84897808?utm_source=3manual
разработка на laravel заказать разработку интернет сайта
бейдж из латуни заказ бейджиков металлические
The first promo code from 1xBet is given for free https://www.patreon.com/posts/1xbet-promo-code-129614966?utm_medium=clipboard_copy&utm_source=copyLink&utm_campaign=postshare_creator&utm_content=join_link
Drexel Online Casino предлагает уникальное gaming-опыт с широким выбором игр, включая слоты, покер, блэкджек и рулетку https://drexel.guru/
ставки кыргызстан ставки кыргызстан .
разработка сайтов в минске заказать разработку сайта
Мальчишка обрадовался, уже хотел прокрутить запись разговора, достал мобилу. Я предупредил, а там как хотите! Меня же сейчас более всего интересует Понтий Пилат… Пилат… – тут он закрыл глаза. — Не поеду! — кратко сказал тот.
To automatically transfer songs from LimeWire 5.4.8
to iTunes, first ensure that iTunes is set to monitor the LimeWire download folder.
In LimeWire, go to "
Read more
File Sharing
Which factors determine whether a specific instance of file
sharing is legal?
Asked by Anonymous
The legality of a specific instance of file sharing is primarily determined by copyright law, which protects the rights of content creators.
Key factors include
Read more
iPod
+2
Can you transfer movies from a bell pvr to your computer?
Asked by Anonymous
Transferring movies from a Bell PVR to your computer is not straightforward due to copyright protection and the proprietary nature of the
PVR’s content. While s
Read more
File Sharing
What is the disadvantages of sharing a room?
Asked by Anonymous
Sharing a room can lead to a lack of privacy, making it difficult for individuals to have personal space
or engage in activities without interruption. Conflicts
Read more
File Sharing
How do you stop utorrent updating?
Asked by Anonymous
To stop uTorrent from updating, you can disable automatic updates in the settings.
Open uTorrent, go to «Options,» then «Preferences,» and f
Read more
File Sharing
How does BitTorrent find out the seeder?
Asked by Anonymous
BitTorrent identifies seeders through a process called «peer discovery.» When a user downloads a file,
their BitTorrent client connects to a tracker o
Read more
Computer Networking
+2
How can you get an invite to torrentleech?
Asked by Anonymous
To get an invite to TorrentLeech, you typically need to be invited by an existing member, as
the site operates on an invite-only basis. Engaging in communities
Read more
Internet
+2
Where can you download the Cadbury font for free?
Asked by Anonymous
The Cadbury font is a proprietary typeface, and it
is not legally available for free download. However, you can find similar fonts on various
font websites, suc
Read more
Internet
+2
Is there any way to transfer files from one mediafire account to another mediafire account?
Asked by Anonymous
Yes, there is a way to transfer files from one MediaFire
account to another. You can accomplish this by downloading the files from the first account to your loc
Read more
Online Music
+2
Is BearShare legal?
Asked by Anonymous
Oh, dude, BearShare? That’s like asking if wearing socks with sandals is fashionable.
Technically, BearShare used to be a peer-to-peer file-sharing
program that
Read more
Email and IM
+2
What are the different information security
threats?
Asked by Anonymous
Google
+1
When Picassa a photo sharing part of Google became part of Google?
Asked by Anonymous
Chemistry
+2
How do you eat a lime?
Asked by Anonymous
Limes are typically sliced into wedges or cut in half, then squeezed to release the juice.
You can also zest the outer skin for added flavor.
Limes are best enj
Read more
Computer History
+3
Advantages and disadvantages of peer to peer file sharing?
Asked by Anonymous
Im going to assume you mean p2p file sharing on a network like Limewire and not a workgroup your
part off. Its a good way for small bands / artists / video make
Read more
Game Consoles and Gaming Hardware
+1
Where can you find a member ID in alfursan?
Asked by Anonymous
How can i find my alfursan membership
В интернет-магазине Miele в Москве можно купить качественную бытовую кухонную технику https://prodam-pylesos.ru/
Взять займ онлайн без отказа оформить займ на карту без отказа срочно
Займы онлайн на карту займы на карту круглосуточно реально без отказа
оптимизация сайта цена https://seoprocessoptimization.ru
lucky jet 1win telegram lucky jet 1win telegram .
Located between the base of the penis and the bladder, deep contained in the rectum, the prostate is an exocrine gland surrounded by muscles which contract and launch throughout ejaculation and assist discharge semen. Nevertheless, experiencing these deep emotions and wishes for the primary time-and even the five hundredth time-could be confusing or disturbing for a lot of men. Often these women have had uncomfortable, usually painful experiences on their first try at anal sex. Many sexually active post-menopausal women, whose vaginas will not be as self-lubricating as they was, report having fun with anal sex greater than vaginal. An lively prostate-one that experiences fairly frequent orgasmic contractions-is usually a wholesome prostate. Men over 60 might need a prostate the size of a plum. 23 September 2013 (UK tried to take over Belgian computers) The UK tried to take over the computer systems of Belgium’s national telecommunications infrastructure. Need tips on how one can pop the query for a P-spot therapeutic massage or simply need some loving steering over the phone, through sexting or webcam? Milking the prostate is a sort of P-Spot massage that pulls out the construct-as much as a deep, full-physique orgasm over a protracted time period, typically more than an hour. Yet you might have to acknowledge this, you want to start out out sluggish-transferring.
15 November 2015 (Award for avoiding lethal force) The LA thugs’ union has condemned an award for avoiding lethal drive. This award is supposed for police officers whose job is to «serve and protect». It seems like an Apple Tv honeypot designed solely to collect award nominations. I conclude that access to a microphone must be controlled like entry to a digital camera. Fashion modifications as fast because the seasons of the yr with each new seasons there’s always latest style for girls it’s always mentioned that trend is sort of a pendulum what goes out of vogue after some time will come again into style. There are a heap of Indian guys telling you to come to their restaurant. Your best chances are joining varied woman gamer websites online, meeting gamer ladies in game and assembly gamer ladies in forums. Sixteen November 2015 (Chances of experiencing abuse from thugs) When black Americans deal with a thug, their likelihood of experiencing abuse from the thug is twice that of white Americans. 16 November 2015 (Americans’ medical coverage) Many Americans’ medical protection has such a high deductible that they still can’t afford medical care. Sixteen November 2015 (Ali al-Nimr being denied medical care) Ali al-Nimr, sentenced to dying for a peaceful protest, is being denied medical care in prison.
The box was designed to be a mini version of the «SNL» stage and because it rotated, it regarded like she was walking on the ceiling and walls. She carried out in a field that made it appear like she was walking on the partitions. She carried out with a harness that made it appear to be she was flying. She doesn’t like her smile. Billie has noted in interviews that she does not like to smile as a result of it makes her feel weak and powerless. If Billie had been to sit down for a Netflix binge, what would she most definitely choose to observe? Just a few of Billie’s songs could be heard in the episodes of what standard Netflix series? The final three songs on the album are «Listen Before I am going», «I like You» and «Goodbye.» The intent of those songs concluding the tracklist was that they have been alleged to be learn like a sentence. The final three songs on «When We all Fall Asleep» are purported to learn as a sentence.
I’ve been trying out different online casinos in the Australian market, and
I have to say that **WFGaming** is a clear winner for several
good reasons. Their platform is user-friendly, secure, and
intuitive — but what really caught my attention is their **WFGaming Free**
program. It’s perfect for players who want to try out real-money games without making an initial
deposit.
With **WFGaming Free 365**, they consistently offer daily and special bonuses, which really helps stretch your gameplay without spending too much.
It’s ideal for both first-timers and seasoned
players who enjoy maximizing value from promotions.
One thing I find useful is their connection with **Free Deposit 365**.
Through this site, it’s easy to find the latest **WFGaming**
deals and bonus codes. The site curates offers consistently, so you never miss out on free credits or exclusive no deposit bonuses from **WF Gaming Australia**.
The variety of games on **WF Gaming** is also impressive — from slot machines to card games and even live dealer options.
Everything runs without lag on both desktop and mobile, and withdrawals
are surprisingly fast compared to other platforms I’ve used.
If you’re someone who enjoys online gaming and wants to make the most
of your experience without risking too much upfront, I highly recommend trying **WFGaming** through **Free
Deposit 365**. It’s been a great way to enjoy fun games while taking advantage of
real rewards.
сайтов продвижение раскрутка сайтов агентство
Сотрудничество с аутсорсинговой компанией позволяет снизить операционные расходы https://megasreda.ru/product/1c-zarplata-i-upravlenie/users
латунный шильдик на заказ металлический шильдик
Бесплатная панель управления panel 1Panel сервером с открытым исходным кодом. Удобный интерфейс, поддержка популярных ОС, автоматизация задач, резервное копирование, управление сайтами и базами. Оптимально для вебмастеров и системных администраторов.
онлайн консультация юриста юрист в арбитражный суд
ПО для управления бизнесом разработка курса обучения
бейджики металлические изготовить бейдж премиум
Сравнение возраста автомобиля и его пробега помогает уменьшить фактор «повезло/не повезло» https://www.kremlinrus.ru/article/411/174373/
производство металлических значков изготовление металлических значков
изготовление корпоративных значков значки на заказ москва
как зайти на сайт mostbet как зайти на сайт mostbet .
bbw live cams
Don’t just watch — join bbw sex live and chat with gorgeous thick women who
want to hear your fantasies and bring them to life in the most erotic
ways possible.
мостбет вход на сегодня https://mostbet22037.ru .
Mantap artikelnya! Saya penggemar game Pragmatic
Play. Saya mainnya via kubet Indonesia. Proses kubet login sangat mudah, apalagi kalau kubet
link alternatif-nya aktif. Promo cashback100%
bikin main makin seru. Game yang disebutkan memang terbukti gacor semua.
Ditunggu artikel selanjutnya!
регистрация 1win регистрация 1win .
металлические значки изготовление металлических значков на заказ
производство металлических значков металлические значки на заказ москва
аккаунт 1win 1win22072.ru .
реклама под ключ seo продвижения стоимость
изготовление железных значков изготовление металлического значка
стоянка для машины на даче стоянка для машины на даче .
продвижение профессиональное сайтов продвижение сайтов под ключ
1 вин вход http://www.1win22074.ru .
Варенуха прекратил свою беготню и заорал: — Думал! Уже думал! До Севастополя по железной дороге около полутора тысяч километров. Первые капли застучали в нижний сосуд – переменка началась. Воевода недовольно поморщился.
Утром Олен организовал поход в бани, и уже чистым гостям закатил пир. — Тигров нельзя есть, — сказала Гелла. На столе тотчас появился толстенный манускрипт, тростниковое перо и медная чернильница.
Я говорил юридически… с юридической точки… Молчу, молчу… Считайте, что я не кот, а рыба, только оставьте ухо. Изумлённые зрители увидели, как серебряные бляшки потянулись друг к другу, с лёгким звяканьем сошлись… И вдруг исчезли. Ее не волновали воспоминания о том, что она была на балу у сатаны, что каким-то чудом мастер был возвращен к ней, что из пепла возник роман, что опять все оказалось на своем месте в подвале в переулке, откуда был изгнан ябедник Алоизий Могарыч.
Here is my web page: https://www.youtube888.com/
– Дара, Сокол, хватит таиться! Мне что, вас с воздуха высматривать? И дружный радостный вопль маленького отряда ответил ему… Большая орда, подчиненная Скитану, стала лагерем дальше по реке. Мальчишка пригляделся – не волк ли? Но листья раздвинулись, обрисовался знакомый силуэт, приметное лицо улыбнулось навстречу. Когда поймёте, ступайте и напишите, как можно подробнее, что надо сделать, как и каким приёмом.
Кроссовки двинулись по рукам и ногам. Иван ахнул, глянул вдаль и увидел ненавистного неизвестного. Тихонько шипя от боли, мальчишка сел на лавку и осмотрелся.
Мне все казалось, — и я не мог от этого отделаться, — что авторы этих статей говорят не то, что они хотят сказать, и что их ярость вызывается именно этим. Экскурсовод не унимался, всё рассказывал, пускал по рукам фотографии: – …что удивительно, несколько крылатых фигурок, похожих на римские фибулы или лопарскую резьбу по моржовому клыку. Дрон обвинял Боруна в потачке, Геру попрекал неумением читать в умах детей.
И двадцати секунд не прошло, как после Никитских ворот Иван Николаевич был уже ослеплен огнями на Арбатской площади. Славка проверил – направляются в село. Собственно, даже не тропа, местами – настоящая дорога, особенно по долинам и предгорьям.
типография спб недорого цифровая типография
продукция типографии https://tipografiya-spb55.ru
типография напечатать https://tipografiya-spb11.ru
Hi there, just became alert to your blog through Google, and
found that it’s really informative. I am going to watch out for brussels.
I will appreciate if you continue this in future.
Lots of people will be benefited from your writing. Cheers!
Here is my blog — gut drops csm
Толкнул преграду, надеясь распахнуть её, как дверь. Иван почувствовал, что теряется. Как по пушному ковру, шли по полю лошади, изредка шлепая по лужам, когда переходили через дороги.
Девушка и Русана опередили, вбежали в проход между крупными глыбами, и он припустил во всю прыть, чтобы догнать. Может быть, навсегда. Когда первые витки увели Тринса, а за ним и остальных, на самый верх пригорка, из тайги выбрался Сокол.
– Да что случилось? – Будешь сидеть здесь! Под присмотром и никаких улиц! Всё, отгулялась! Мама плакала и ругала Русану, непонятно за что. Но она тотчас нашла русу тысячи оправданий: «Он переживал! Из-за меня, конечно. После его горя он теперь только, в нынешнем году, совершенно нравственно ожил.
Он разговаривал с матерью, Наташа села с Соней у шахматного столика, приглашая этим к себе князя Андрея. Семён довольно крякнул, подозвал к себе Славку: – Тут станем ждать. Грум, Сокол и Славка – вот и вся дружина.
– Ой-ой, какие вы все умные, мясоеды! Мама говорит, что растительная пища дает витамины и микроэлементы! – Да что твои витамины! Одну таблетку в день и салатов не надо! Запив колой из славкиной бутылки, они двинулись дальше. Олен протянул ему туесок: – Тогда лимонник бери весь. Соня, слушая, думала о том, какая громадная разница была между ей и ее другом и как невозможно было ей хоть насколько-нибудь быть столь обворожительной, как ее кузина.
типография срочно типография срочно
Как всегда, если смотришь на вспышку. Молодая же родственница Аркадия Аполлоновича вдруг расхохоталась низким и страшным смехом. Я, откровенно говоря, не люблю последних новостей по радио.
Дети обомлели. Он сделал те несколько шагов, что отделяли его от мамы, обнял её. — Зачем? — продолжал Воланд убедительно и мягко, — о, трижды романтический мастер, неужто вы не хотите днем гулять со своею подругой под вишнями, которые начинают зацветать, а вечером слушать музыку Шуберта? Неужели ж вам не будет приятно писать при свечах гусиным пером? Неужели вы не хотите, подобно Фаусту, сидеть над ретортой в надежде, что вам удастся вылепить нового гомункула? Туда, туда.
– Угу. Не помня как, я совладал с цепью и ключом. Толстая и высокая свеча с темными полосками отмеряла время ночью.
Ждан, Дара и Гера уместились в первую, Борун, Тагет и Онфим во вторую, Олен с детьми – в третью. Грамота, счисление, основы жизни, оружный бой. Всадник встревожено огляделся по сторонам.
Шипя от боли, присел, принялся нашаривать потерю. Но зрачки быстро сократились, уступив место синеве. К исходу дня мальчишка не только представлял, как и куда текут дождевые воды, просочившись в почву.
Словно выполненные другой краской, более яркого цвета. Пока так сойдёт. Обернулся в поисках причины.
– Силен, голубчик, ты всё-таки пришёл! Как я рада, – воскликнула именинница, протягивая руки навстречу гостю. – Может, хорош? Давайте здесь останемся, – попытался вразумить друзей Славка, но получил пренебрежительный отказ. Водяная гора оказалась такой, что дромон начал всплывать по ней вверх, на высоту.
Тот добродушно принял ласку, вдохнул широкими ноздрями и терпеливо ждал, пока Славка осваивал стремя и седло. Двое или трое промелькнули совсем рядом, едва не сбив волшебницу и Русану. Но вопли команды и воинов, беготня и ругань длились довольно долго, пока Гораций не сообразил разложить круговой костер, в свете которого призраки стали незаметны.
Ищете, где купить акпп с гарантией и доставкой? Мы предлагаем проверенные агрегаты с пробегом до 100 тыс. км из Японии, Европы и Кореи. Подбор, установка, оформление документов — всё под ключ.
печать визиток печать визиток спб цена
скачать бк осталось именно выбрать подходящее mostbet22042.ru .
1 вин топ 1win14002.ru .
Станки для производства зиговочные станки металлообработка, резка, сварка, автоматизация. Продажа новых и восстановленных моделей от ведущих брендов. Гарантия, обучение персонала, техподдержка.
печать визиток шелкография печать визиток золотом
официальный сайт 1win зеркало 1win14003.ru .
печать черных визиток печать визиток пластик
Онлайн сервис скачать svg с сайта онлайн для получения картинок с любого сайта. Вставьте URL — и мгновенно получите изображения на своём устройстве. Поддержка всех форматов, никаких ограничений и лишних действий. Работает бесплатно и круглосуточно.
Artikel yang sangat informatif! Saya juga sering bermain game bola online, tapi tetap
berhati-hati dengan situs tidak resmi.
—
Senang baca artikel ini. Di luar sana memang banyak yang menyamar sebagai
situs game bola padahal agen judi bola online.
Tetap waspada penting banget.
—
Keren banget kontennya! Saya pribadi lebih memilih game fair play
tanpa terhubung ke judi bola online terpercaya.
—
Penjelasan yang jujur dan jelas. Banyak yang tidak sadar kalau iklan di game bisa mengarah ke bandar judi bola online,
jadi penting banget untuk pilih platform yang sah.
—
Informasi yang sangat bermanfaat! Dunia game online kadang beririsan dengan agen judi bola, jadi tidak
asal klik.
—
Thanks udah sharing! Banyak juga situs bandar judi bola online terpercaya yang menyusup lewat game ads, jadi
harus waspada.
Нужна печать наклеек купить? Закажите стикеры любых форм и размеров с доставкой. Яркие, прочные, влагостойкие наклейки на пленке и бумаге — для рекламы, декора, маркировки и упаковки.
Изготовление и https://pechat-nakleek44.ru. Стикеры для бизнеса, сувениров, интерьера и упаковки. Печатаем тиражами от 1 штуки, любые материалы и формы. Качественно, недорого, с доставкой по СПб.
Профессиональная https://tipografiya-spb33.ru. Изготовим любые печатные материалы — от визиток до каталогов. Качественно, быстро, с гарантией. Закажите онлайн или приезжайте в офис в СПб.
SEO (Search Engine Optimization) is a set of measures to improve a website Online course — SEO for gambling in Turkey. TG — @helena_kaya
mostbet. mostbet. .
1win ваучер 1win ваучер .
Безболезненная https://lazernaya-epilyaciya33.ru Удаление волос на любом участке тела. Работаем с чувствительной кожей, используем новейшие лазеры. Акции, абонементы, индивидуальный подход.
Профессиональная студия лазерной эпиляции спб. Эффективное удаление волос на любом участке тела, подход к любому фототипу. Сертифицированные специалисты, стерильность, скидки. Запишитесь прямо сейчас!
Удаление волос сеансы лазерной эпиляции: гладкая кожа на долгое время. Аппараты последнего поколения, опытные мастера, комфортная обстановка. Эпиляция для женщин и мужчин. Онлайн-запись, гибкие цены, без лишнего стресса.
https://circleten.org/a/359441?postTypeId=whatsNew
How Online Casinos Are a Global Phenomenon
Internet-based gambling hubs have changed the casino gaming scene, providing a level of ease and diversity that conventional venues don’t provide. Recently, a growing community around the world have chosen the adventure of virtual casinos as a result of its accessibility, appealing qualities, and ever-expanding catalogs of games.
One of the biggest attractions of virtual gambling hubs is the incredible variety of entertainment options at your disposal. Whether you like rolling old-school slots, trying out narrative-rich video slots, or mastering skills in card and board games like Roulette, casino websites boast endless options. A large number of platforms additionally include live gaming streams, giving you the chance you to interact with human game hosts and opponents, all while taking in the authentic ambiance of a traditional gambling venue without leaving your home.
If you’re unfamiliar with the world of online gaming or hope to explore proven options, why not engage with our dynamic community? It’s a hub where gamblers post reviews, helping you to maximize your casino activities. Check out the community and check it out now: .
Beyond variety, virtual gaming providers are known for ease of access.
Безболезненная студия лазерной эпиляции спб Удаление волос на любом участке тела. Работаем с чувствительной кожей, используем новейшие лазеры. Акции, абонементы, индивидуальный подход.
Self-SEO website promotion: step-by-step instructions Contents Step 1: Strategy and semantic core BLACK SEO LINKS, BACKLINKS, MASS BACKLINKING – TELEGRAM @SEO_LINKK
Удаление волос салон лазерной эпиляции: гладкая кожа на долгое время. Аппараты последнего поколения, опытные мастера, комфортная обстановка. Эпиляция для женщин и мужчин. Онлайн-запись, гибкие цены, без лишнего стресса.
Профессиональная https://lazernaya-epilyaciya11.ru. Эффективное удаление волос на любом участке тела, подход к любому фототипу. Сертифицированные специалисты, стерильность, скидки. Запишитесь прямо сейчас!
грузчики нанять грузчика заказать
нанять грузчиков недорого недорогие грузчики
услуги профессиональных грузчиков грузчики недорогие
программное обеспечение компьютера цены https://internet-magazin-soft.kz
Избавьтесь от волос сколько делать лазерную эпиляцию навсегда — с помощью лазерной эпиляции. Эффективные процедуры на любом участке тела, минимальный дискомфорт, заметный результат уже после первого сеанса.
Soil compaction is one of the most important operations carried Vegan Baking 101: Ingredients We Use and Why They Matter
Избавьтесь от волос лазерная эпиляция навсегда — с помощью лазерной эпиляции. Эффективные процедуры на любом участке тела, минимальный дискомфорт, заметный результат уже после первого сеанса.
https://pharmau24.shop/# Online medication store Australia
бесплатная доставка цветов купить цветы в питере
узи цена адрес записаться на узи
клиника диагностика частная клиника
взрослый дерматолог детский дерматолог
Write more, thats all I have to say. Literally, it seems as though you relied on the
video to make your point. You clearly know what youre talking about, why
waste your intelligence on just posting videos to your weblog
when you could be giving us something informative to
read?
врач медицинский центр медицинский центр абакан сайт
There are several types of promo codes: for registration, replenishment and personal offers http://extaz.gtaserv.ru/viewtopic.php?f=12&t=3206
After reading the article, you will learn https://rentry.co/owsa2dix
Единый портал аренды. На Аренда24 можно взять в аренду или сдать в аренду коммерческую недвижимость, строительную технику, оборудование от ИП и организаций по всей Беларуси Позвонить
Конус, глубиной метра полтора. Секс Знакомства Нсо Горелый лес промолчал, а спасенный – вернул эхо.
– Никто, кроме этих презренных божьих людей, которые с сумками за плечами приходят ко мне с заднего крыльца, боясь попасться на глаза князю, и не для того, чтобы не пострадать от него, а для того, чтобы его не ввести в грех. Как Правильно Пишется Расписка Займ Денег Он поёжился.
Фонарь бил мощно, а вокруг себя создавал отдельное кольцо. Займ Денег Анапа Ничуть не смущённый собственной оплошностью командир атаманцев первым делом отправил самого молодого казака собрать стрелы.
купить натяжной потолок купить натяжной потолок .
терапевт абакан осмотр терапевта
Быстро натянул портки. Личный Кабинет Финтерра Войти По Номеру Телефона Без Пароля Но внутри – ещё краше.
«На тебе!. Мид России Документы Легализация Она так восхитительно пахла, шкурка выглядела настолько румяной, что жутко хотелось схватить её целиком и растерзать, ни с кем не делясь.
Но никто не спешил содрать его с «матрёшки», как и серьги с браслетами. Бюро Переводов С Нотариальным Заверением Тушино Не Славке, а вот этому человечку, ослепительно рыжему.
Рядом с обвиняемым остался Онфим. Деньги На Личное Займ Волхв кивнул головой, продолжил: – Да, не по их силам да умениям.
Я в Индии была, видишь? И она покружилась, демонстрируя сари. Секс Знакомства Города Абакана Славка дошёл до берега Июса и растерялся.
Hey there, creative soul, I literally just discovered something insanely awesome, I had to pause my life and share immediately.
This article is totally bonkers. It’s packed with smooth UX, next-level thinking, and just the right amount of pixel sass.
Suspicious yet? Alright, take a peek right on this link!
Didn’t click? Fine. Imagine a robot designer dreamed of a site after watching sci-fi. That’s the vibe this thing of wonder gives.
So don’t be shy, and send it to your friends. Because honestly, this is next-level.
You’re welcome.
прием терапевта абакан хороший платный терапевт
Aw, this was a really nice post. Taking the time
and actual effort to produce a great article… but what can I say… I put things
off a lot and never manage to get anything done.
нанять грузчиков профессиональные грузчики
Okay, legend, I recently ran into something weirdly brilliant, I had to shut my tabs and scream about it.
This masterwork is a design explosion. It’s packed with crazy layouts, brain-hugging ideas, and just the right amount of pixel sass.
Sound too good? Alright, go look right here!
Didn’t click? Fine. Imagine a cat in a hoodie built a site after reading memes. That’s the energy this content gives.
So don’t be shy, and tattoo the link. Because honestly, this is next-level.
That’s it.
заезд на дачу под ключ doroga-k-uchastku-1122.ru .
Она села на щетку, прислушиваясь к тому, как женский голос кричит в скважину двери: — Откройте, откройте! Дуся, открой! У вас, что ли, вода течет? Нас залило. Быстрые Знакомства Секс Кемерово Всхлипывание прекратилось.
И впиталась, потускнела. Бюро Переводов С Нотариальным Заверением В Перова Додумывал и огорчался Славка уже в полёте, который закончился нескоро.
https://eropharmfast.shop/# cheapest online ed meds
Лишь гордость, остатки гордости – они удерживали Славку. Нотариальный Перевод Документов Статьи Лесоруб пал ниц, скованный страхом, закрывая руками голову, которую жестоко терзала боль.
Кончив сонату, Катя, не принимая рук с клавишей, спросила: «Довольно?» Аркадий объявил, что не смеет утруждать ее более, и заговорил с ней о Моцарте; спросил ее — сама ли она выбрала эту сонату, или кто ей ее отрекомендовал? Но Катя отвечала ему односложно: она спряталась, ушла в себя. Как Можно Взять В Займ Деньги — Через полчаса, — ответил Степа и, повесив трубку, сжал горячую голову руками.
http://biotpharm.com/# get antibiotics quickly
https://eropharmfast.shop/# Ero Pharm Fast
https://biotpharm.shop/# buy antibiotics from canada
https://pharmau24.com/# pharmacy online australia
Свежие новости единоборств: бои, результаты, анонсы турниров, интервью и трансферы бойцов. UFC, Bellator, ACA и другие промоушены. Следите за карьерой топовых бойцов и громкими поединками в мире смешанных единоборств.
Fresh and relevant football news: matches, results, transfers, interviews and reviews. Follow the events of the Champions League, RPL, EPL and other tournaments. All the most important from the world of football — on one page!
http://eropharmfast.com/# what is the cheapest ed medication
Читайте свежие новости кхл онлайн. Результаты матчей, расклады плей-офф, громкие трансферы и слухи. Всё о российских и зарубежных лигах.
Самые главные новости футбола англия каждый день: от закулисья клубов до громких голов. Новости РПЛ, НХЛ, Бундеслиги, Серии А, Ла Лиги и ЛЧ. Прямые эфиры, прогнозы, аналитика и трансферные слухи в одном месте.
http://eropharmfast.com/# best online ed pills
https://sup-cellucare.com has made a massive distinction in my life. My blood sugar degrees are a lot more constant, and I feel extra energised. The all-natural components are a big plus, and I enjoy that it’s a risk-free, effective way to manage my health and wellness. Extremely recommend giving it a shot!
живые подписчики в телеграм канал живые подписчики в телеграм канал
https://pharmau24.com/# online pharmacy australia
https://pharmsansordonnance.com/# pharmacie en ligne france livraison internationale
It�s difficult to find educated individuals on this topic, however, you sound like you know what you�re talking about! Thanks
my site … http://swissairways-va.com/phpBB3/viewtopic.php?t=770701
https://viasansordonnance.com/# viagra en ligne
https://ciasansordonnance.shop/# Cialis sans ordonnance 24h
If you are just about to register with 1win, be sure to use the promo code https://v-dome-deti.ru/other/all/d90ajp/
https://ciasansordonnance.com/# Cialis pas cher livraison rapide
Туроператор №1 по приему туристов в Казани. Туры и экскурсии в Казань и по Татарстану достопримечательности казани
http://ciasansordonnance.com/# commander Cialis en ligne sans prescription
https://kampascher.shop/# livraison discrete Kamagra
The code must be activated during registration https://boi.instgame.pro/forum/index.php?topic=104787.0
https://ciasansordonnance.shop/# cialis generique
https://kampascher.com/# kamagra 100mg prix
заезд на участок под ключ московская область цена https://parkovka-dlya-mashiny-1122.ru/ .
http://kampascher.com/# achat kamagra
balloons dubai delivery hot air balloons dubai
https://viasansordonnance.com/# viagra en ligne
https://pharmsansordonnance.com/# pharmacie en ligne livraison europe
https://kampascher.com/# kamagra livraison 24h
https://kampascher.shop/# acheter kamagra site fiable
Looking for the best cannabis clubs in Benidorm ley marihuana españa 2024
https://ciasansordonnance.shop/# Cialis sans ordonnance 24h
http://kampascher.com/# pharmacies en ligne certifiГ©es
Асиметрични рокли за уникален стил и динамична визия
ежедневни рокли https://www.rokli-damski.com/ .
Актуални дамски комплекти, които съчетават удобство и модерна визия
комплекти за жени http://komplekti-za-jheni.com/ .
Your desires are on you, and their realization is on us https://sinhairvietnam.vn/pages/kurortnyy_roman.html
сделать въезд на участок под ключ http://www.proezd-k-uchastku-1122.ru .
https://confiapharma.com/# farmacia online cupon de descuento
https://confiapharma.com/# 24 horas farmacia online
http://farmaciasubito.com/# victoza prezzo
https://farmaciasubito.shop/# dibase 50.000 u.i. prezzo
Продвижение в социальных сетях SMM https://vc.ru/smm-promotion
http://confiapharma.com/# fluoxetina donde comprar sin receta
Стилът започва с подходящите дамски блузи за твоя ден
дамски блузи с дълъг ръкав https://www.bluzi-damski.com .
Лесно съчетание на дамски тениски със спортни или елегантни аутфити
интересни дамски тениски https://teniski-damski.com .
http://confiapharma.com/# mejor farmacia online espaГ±a
Купить подписчиков ВК — быстрый способ увеличить охваты, поднять доверие к сообществу https://vc.ru/smm-promotion/2017240-kupit-podpischikov-vk-top-21-servis
Find out how to use your 1xbet Argentina promo code https://waylontgse08633.evawiki.com/9611170/descubre_cГіmo_usar_el_cГіdigo_promocional_1xbet_para_apostar_gratis_en_argentina_mГ©xico_chile_y_mГЎs
Строительство деревянных домов с акцентом на энергоэффективность и уют
деревянные дома под ключ деревянные дома под ключ .
Специализированный клининг для бизнеса — чистота в каждом метре
клининг компания http://kliningovaya-kompaniya0.ru/ .
Мир полон тайн https://phenoma.ru читайте статьи о малоизученных феноменах, которые ставят науку в тупик. Аномальные явления, редкие болезни, загадки космоса и сознания. Доступно, интересно, с научным подходом.
https://farmaciasubito.com/# visunac collirio
Магазин шин с оплатой при получении и быстрой отправкой
интернет магазин автомобильных шин kupit-shiny0-spb.ru .
These funds must be wagered within 30 days from the code activation by placing sports bets https://gorillasocialwork.com/story22345522/1xbet-bangladesh-promo-code
https://pharmacieexpress.com/# cialis achat pharmacie en ligne
engineering resumes examples engineers resumes
Закажите сувенирную продукцию с логотипом и укрепите имидж бренда
заказать сувениры с логотипом suvenirnaya-produktsiya-s-logotipom-1.ru .
https://pharmacieexpress.com/# pharmacie antibiotique sans ordonnance
resume electronics engineer engineer resume builder
http://confiapharma.com/# ginecanesten se puede comprar sin receta
заезд для автомобиля заезд для автомобиля .
Научно-популярный сайт https://phenoma.ru — малоизвестные факты, редкие феномены, тайны природы и сознания. Гипотезы, наблюдения и исследования — всё, что будоражит воображение и вдохновляет на поиски ответов.
resume cloud engineer cv engineer resume
http://pharmacieexpress.com/# levitra prix en pharmacie sans ordonnance
Alright, buddy, I accidentally ran into something shockingly creative, I had to shut my tabs and scream about it.
This thing is totally bonkers. It’s packed with crazy layouts, bold vibes, and just the right amount of mad energy.
Sound too good? Alright, see for yourself right this moment!
Need more hype? Fine. Imagine a cat in a hoodie whipped up a site after watching sci-fi. That’s the frequency this thing of wonder gives.
So click already, and tattoo the link. Because on my Wi-Fi, this is what your brain craved.
Now go.
http://pharmmex.com/# what prescriptions can you buy in mexico
Предлагаем надежное холодильное и климатическое. Наш ассортимент включает решения для хранения продуктов и поддержания комфортного микроклимата, обеспечивая высокую энергоэффективность Подробнее
https://pharmmex.shop/# affordable medications
Долой суету: аренда яхты — это ваше пространство для релакса
аренда яхты в сочи http://arenda-yahty-sochi23.ru/ .
https://pharmexpress24.com/# best online pharmacy ambien
¡Hola expertos en el azar !
Jugar en sitios internacionales tambiГ©n permite aprovechar tipos de cambio favorables. Puedes convertir tu divisa con ventaja antes de apostar. Una oportunidad extra para ganar mГЎs.
Una gran ventaja frente a los casinos tradicionales.
Casinos online fuera de espaГ±a con jackpots progresivos — п»їhttps://casinofueradeespana.xyz/
¡Que tengas maravillosas rondas increíbles !
Remember, this special 1xBet promo code free bet offer https://nn7fq7.webmepage.com/1xbet-promo-code-today-bangladesh
https://pharmexpress24.com/# viagra pharmacy cost
I’m not positive where you’re acquiring your info, but wonderful issue. I requirements to expend some time scholarship more or comprehension more. Thank you for splendid information I was appearance for this knowledge for my task.
Here is my webpage; http://WWW.Latechbbb.com/forum/member.php?67481-Davidhmo
https://pharmmex.shop/# azithromycin over the counter mexico
You made some clear points there. I did a search on the matter and found most people will accede with your weblog.
Feel free to surf to my blog post … http://Forum.LL2.Ru/member.php?1108836-Davidlry
экстренная стоматология https://stomatologiya-vladimir-2.ru .
Log in and register in the Sever Casino mobile application север казино личный кабинет
http://pharmexpress24.com/# safeway pharmacy store 1818
https://pharmmex.shop/# best medicine to buy in mexico
Great data. Many thanks.
Also visit my web blog; Speed Kino (http://0731ht.net:3000/shaddelatorre/donghaeng-lottery-8156/wiki/Donghaeng-Lottery-Powerball%3A-Discovering-the-Bepick-Analysis-Community)
Корм Jarvi для щенков и котят: старт здоровой жизни с первых дней
jarvi корм для кошек и собак – полный обзор https://www.ozon.ru/product/suhoy-korm-jarvi-polnoratsionnyy-dlya-vzroslyh-koshek-s-chuvstvitelnym-pishchevareniem-s-indeykoy-1-1173234324 .
Загадки Вселенной https://phenoma.ru паранормальные явления, нестандартные гипотезы и научные парадоксы — всё это на Phenoma.ru
https://vgrsources.com/# viagra mexico pharmacy
накрутка просмотров телеграм бесплатно накрутка просмотров телеграм бесплатно
https://vgrsources.com/# viagra purchase canada
https://vgrsources.com/# viagra tablet online
Гагры ждут гостей — отдых у моря, который приятно вспоминать
гагра снять жилье гагра снять жилье .
70918248
References:
how do you get steroids (http://e-hp.info/mitsuike/4-bbs/bbs/m-123y.cgi/parapharmaciefr.com/jlEJSmUKX)
70918248
References:
Is Testosterone The Same As Steroids (https://glencoenews.com/places/hollywood-heating-and-air/)
https://vgrsources.com/# viagra purchase online
I haven’t checked in here for a while since I thought it was getting boring, but the last several posts are good quality so I guess I’ll add you back to my everyday bloglist. You deserve it my friend 🙂
Also visit my website :: http://Www.Ts-gaminggroup.com/member.php?103025-Eldarywr
кухонный гарнитур по размерам недорого москва http://www.kuhnni-na-zakaz1.ru/ .
Hurrah! Finally I got a webpage from where I be able
to truly obtain helpful facts concerning my study and knowledge.
https://vgrsources.com/# sildenafil india price
https://vgrsources.com/# female viagra order
You definitely made your point.
Also visit my homepage … https://daima.goodtool.fun/lilianalittlet
Почему регулярная поверка приборов необходима для безопасности и точности
Поверка средств измерений https://www.poverka-si-msk.ru/ .
https://vgrsources.com/# viagra in usa
Cheers, A lot of knowledge.
Take a look at my webpage Sports Toto (https://gitea.hpcm.site/adanxni290724)
I blog quite often and I truly appreciate your information. This text has truly peaked my interest. I am going to bookmark your site and keep up checking out for new details about once per week. I subscribed to your RSS feed too.
Here is my web-site: http://www.jeepin.com/forum/member.php?u=153222
For latest information you have to pay a visit world-wide-web and on web I found this web
site as a finest web site for latest updates.
¡Saludos, apasionados de los juegos !
Un casino fuera de espaГ±a es la mejor elecciГіn si deseas evitar procesos KYC y validaciones bancarias complicadas.
Casinoporfuera.xyz, tu aliado para apuestas seguras — https://www.casinoporfuera.xyz/
Optar por casinos fuera de espaГ±a te da acceso a promociones que no verГЎs en sitios regulados locales.TambiГ©n puedes apostar con divisas extranjeras sin problemas.El anonimato es otro gran atractivo para muchos usuarios.
¡Que disfrutes de increíbles beneficios !
car delivery service long distance towing
http://prednipharm.com/# prednisone 20mg online
https://crestorpharm.com/# crestor tablet
http://semaglupharm.com/# Semaglu Pharm
zaezd-dlya-mashiny-1122.ru .
http://semaglupharm.com/# SemagluPharm
70918248
References:
injectable steroids names — https://seabreezehomesandliving.com/coastal-chic-10-must-have-coastal-decor-ideas-part-2/,
http://lipipharm.com/# LipiPharm
шкаф с рольставнями в москве http://shkaf-parking-3.ru .
70918248
References:
legal fat burning steroids (https://commoditytobrand.com/wp/)
Happy to join and exchange ideas.
70918248
References:
Anabolic steroids Benefits (http://canellecrea.ovh/project/material-design/)
Hello! This is my first visit to your blog!
We are a group of volunteers and starting
a new project in a community in the same niche. Your blog provided us useful information to work on. You
have done a outstanding job!
http://prednipharm.com/# PredniPharm
https://semaglupharm.com/# Order Rybelsus discreetly
Профессиональное косметологическое оборудование купить в москве для салонов красоты, клиник и частных мастеров. Аппараты для чистки, омоложения, лазерной эпиляции, лифтинга и ухода за кожей.
70918248
References:
anabolic steroid info (https://singulartruffle.com/conservacion-trufa-negra/?utm_source=rss&utm_medium=rss&utm_campaign=conservacion-trufa-negra)
888starz ????? https://888starz-official.com .
70918248
References:
steroids for Bodybuilders (https://mathgiri.com/artificial-intelligence-ai-in-education/)
70918248
References:
decanoate steroid (https://hireessayexpert.com/the-power-of-effective-communication-in-business/)
https://prednipharm.com/# purchase prednisone no prescription
Hi, new member here, excited to get involved.
70918248
References:
steroids before and after pics after one cycle (https://axecapitalworld.com/2020/04/17/waluta-brazylii-zdjecia-i-ilustracje/)
https://semaglupharm.com/# can you take rybelsus and mounjaro together
¡Saludos, seguidores del entretenimiento !
Muchos jugadores eligen los casinos online extranjeros porque permiten depГіsitos sin comisiones ocultas y sin lГmites absurdos.
GuГa fГЎcil para jugar en casinos online extranjeros — п»їhttps://casinos-extranjeros.es/
Gracias a casinos-extranjeros.es puedes suscribirte a un boletГn semanal con anГЎlisis de tendencias. Esto es ideal para apostadores estratГ©gicos. InformaciГіn Гєtil al instante.
¡Que disfrutes de increíbles jackpots impresionantes!
Коллекции 2025 года: что нового предлагает императорский фарфор
императорский фарфор купить в интернет магазине https://imperatorskiy-farfor.kesug.com .
70918248
References:
d ball steroid pills, https://amarachicranesandforklifts.com/2021/12/28/we-work-more-to-help-youmakes-your-brand-unique/,
канализация для дома под ключ цена канализация для дома под ключ цена .
https://lipipharm.shop/# Lipi Pharm
https://semaglupharm.com/# Semaglutide tablets without prescription
Hello, happy to connect and share experiences.
Renting a car in the United Arab Emirates is a convenient way https://tradeusanews.com/why-is-it-worth-choosing-rentcaruae-when-choosing-a-car-rental-option.html
70918248
References:
none (https://theunintelligenteconomist.com/?p=72)
https://lipipharm.shop/# LipiPharm
https://semaglupharm.com/# SemagluPharm
In the UAE, renting a car from the best car rental company https://italycarsrental.com/profitable-car-rental-in-dubai-basic-rules-and-advantages.html
Fantastic website you’ve gotten here.. It�s difficult to find quality writing similar yours presently. I honestly appreciate people similar you! Bear care!!
Feel free to visit my website … http://www.smokinstangs.com/member.php/278383-Leonskv
Outsourcing of accounting services is the transfer of your accounting https://planet-today.ru/stati/nauka-i-tekhnika/business-production/item/183009-mozhet-li-glavnyj-bukhgalter-rabotat-po-sovmestitelstvu
¡Hola, apasionados del juego !
Casinos online extranjeros con mГ©todos de pago anГіnimos — https://casinoextranjerosespana.es/# mejores casinos online extranjeros
¡Que disfrutes de asombrosas tiradas exitosas !
Crestor Pharm: Crestor Pharm — Crestor Pharm
Поисковое продвижение — это долгосрочные инвестиции в развитие бизнеса продвижение строительных сайтов
¡Saludos, amantes de la adrenalina !
Casinos sin licencia EspaГ±a con juegos seguros — https://casinossinlicenciaenespana.es/# casinos sin licencia espaГ±a
¡Que vivas recompensas únicas !
Купить диплом под заказ в столице возможно через сайт компании. orikdok-5v-gorode-kazan-16.online
what can you not take with semaglutide: Safe delivery in the US — п»їBuy Rybelsus online USA
займ онлайн срочно займы онлайн на карту без залога
PredniPharm: iv prednisone — PredniPharm
Undoubtedly, one of the most significant benefits of outsourcing accounting https://progorodsamara.ru/interesnoe/view/obzor-buhgalterskih-programm-ispolzuemyh-v-rossii
Услуги клининга с выездом в день обращения без доплат
служба клининга http://www.kliningovaya-kompaniya10.ru .
Наша цель — поддерживать здоровье женщин и помогать им в решении любых медицинских вопросов https://yescatalog.ru/ru/tsentr-women-clinik-poluchenie-meditsinskoy-knijki-v-moskve/
http://semaglupharm.com/# semaglutide compound
Semaglu Pharm is trulicity a semaglutide Semaglu Pharm
CrestorPharm Crestor mail order USA CrestorPharm
how to get prednisone without a prescription: PredniPharm — prednisone cream
Semaglu Pharm: Safe delivery in the US — SemagluPharm
http://medsfrommexico.com/# mexico drug stores pharmacies
Мы изготавливаем дипломы любой профессии по выгодным ценам. Мы готовы предложить документы техникумов, которые расположены на территории всей РФ. Дипломы и аттестаты печатаются на бумаге самого высокого качества. Это позволяет делать государственные дипломы, которые невозможно отличить от оригиналов. orikdok-4v-gorode-tula-71.ru
India Pharm Global: Online medicine order — cheapest online pharmacy india
medication from mexico pharmacy Meds From Mexico Meds From Mexico
canadian neighbor pharmacy: canadian mail order pharmacy — cross border pharmacy canada
Наша цель — забота о пациенте. Благодарность от наших пациентов — основной показатель качества лечения https://fondfirm.ru/ru/firm-women-clinik-tsentr-po-oformleniyu-meditsinskoy-knijki-v-moskve/
https://indiapharmglobal.com/# cheapest online pharmacy india
¡Hola, aventureros del desafío !
Casino online sin licencia con variedad 2025 — п»їcasinossinlicenciaespana.es casinos sin licencia en EspaГ±ola
¡Que experimentes tiradas exitosas !
mexico pharmacies prescription drugs: Meds From Mexico — Meds From Mexico
https://canadapharmglobal.com/# canadian pharmacy online store
mexican mail order pharmacies: Meds From Mexico — mexican drugstore online
https://canadapharmglobal.shop/# canadian pharmacy ed medications
Laenu taotlemin on kiire ja lihtne protsess kiirlaen
India Pharm Global Online medicine home delivery India Pharm Global
Купить диплом о высшем образовании поспособствуем. Кто может аттестат купить в Вологде — diplomybox.com/kupit-attestat-v-vologde
India Pharm Global: India Pharm Global — indian pharmacy paypal
The bumper is an important element of the car тут
Meds From Mexico Meds From Mexico Meds From Mexico
https://medsfrommexico.com/# Meds From Mexico
http://indiapharmglobal.com/# India Pharm Global
Online medicine home delivery online pharmacy india indian pharmacy online
reputable mexican pharmacies online: Meds From Mexico — Meds From Mexico
canadian online pharmacy: canadian pharmacy ltd — canadian pharmacy scam
http://canadapharmglobal.com/# ordering drugs from canada
Meds From Mexico Meds From Mexico buying prescription drugs in mexico
best online pharmacy india: India Pharm Global — indianpharmacy com
https://medsfrommexico.com/# Meds From Mexico
http://medsfrommexico.com/# Meds From Mexico
Почему бизнес выбирает лизинг коммерческого транспорта вместо покупки
лизинг грузовиков https://lizing-auto-top1.ru/gruzovye-avtomobili .
canadian pharmacy antibiotics: canadian pharmacy prices — best online canadian pharmacy
India Pharm Global: India Pharm Global — India Pharm Global
займы приложения займы приложения
pharmacy website india: India Pharm Global — п»їlegitimate online pharmacies india
https://canadapharmglobal.com/# canadian pharmacy
Приобрести диплом любого ВУЗа. Приобретение диплома ВУЗа через надежную компанию дарит ряд достоинств для покупателя. Это решение помогает сэкономить как личное время, так и серьезные финансовые средства. orikdok-v-gorode-ekaterinburg-66.online
canadian compounding pharmacy: precription drugs from canada — canadian pharmacy price checker
India Pharm Global: top online pharmacy india — best online pharmacy india
https://canadapharmglobal.com/# canadian pharmacy no scripts
https://indiapharmglobal.com/# India Pharm Global
https://medsfrommexico.shop/# Meds From Mexico
top online pharmacy india: india pharmacy — indian pharmacy paypal
canadian drugstore online: Canada Pharm Global — canada drug pharmacy
где взять кредит без отказа с плохой кредитной историей где взять кредит без отказа с плохой кредитной историей .
дренаж водосточной системы .
https://indiapharmglobal.shop/# Online medicine home delivery
onlinecanadianpharmacy 24: canada rx pharmacy world — cheapest pharmacy canada
https://indiapharmglobal.com/# world pharmacy india
¡Saludos, visitantes de plataformas de apuestas !
MГ©todos de pago en casinos online extranjeros — https://www.casinoextranjerosenespana.es/ casinoextranjerosenespana.es
¡Que disfrutes de logros sobresalientes !
India Pharm Global: buy medicines online in india — best india pharmacy
http://papafarma.com/# Papa Farma
https://papafarma.com/# cepillo electrico io
Papa Farma Papa Farma casenlax jarabe niГ±os precio
https://svenskapharma.com/# munskydd för barn apotek
https://papafarma.shop/# Papa Farma
silymarin apotek: otoskop apotek — Rask Apotek
evopad 75: Papa Farma — farmacia a domicilio zaragoza
epiduo forte comprar online: Papa Farma — Papa Farma
Просторный каркасный дом с гаражом и кабинетом для удалённой работы
каркасные дома санкт петербург http://www.spb-karkasnye-doma-pod-kluch.ru/ .
EFarmaciaIt poste domani per te ГЁ detraibile farmacia sito
Современные технологии печати на футболках для чёткого и стойкого результата
заказ футболок с принтом https://www.pechat-na-futbolkah777.ru/ .
Svenska Pharma: Svenska Pharma — Svenska Pharma
строительные подъемники строительные подъемники .
Одо-Студио — это не просто агентство. Это команда, которая помогает брендам расти https://odo-studio.ru/
Papa Farma: Papa Farma — prospecto ozempic 1 mg
http://svenskapharma.com/# apotek vitaminer
https://efarmaciait.com/# EFarmaciaIt
farmacia cerca de mi abierta: Papa Farma — Papa Farma
Rask Apotek: Rask Apotek — Rask Apotek
EFarmaciaIt: farmacia italiana online — sconti farmacie online
https://svenskapharma.shop/# vätskeersättning engelska
Vodka Casino — это платформа с ярким русскоязычным дизайном, где представлены сотни игр: от классических слотов до live-дилеров водка казино
¡Saludos, participantes del juego !
casinosextranjero.es – ideal para nuevos jugadores — п»їhttps://casinosextranjero.es/ casinos extranjeros
¡Que vivas increíbles instantes inolvidables !
Papa Farma: Papa Farma — Papa Farma
If you are going to play 1Win, be sure to use the promo code 1W500GIFT http://assa0.myqip.ru/?1-4-0-00005750-000-0-0-1749587558
Finally, Free Bets (risk-free betting credits) allow testing the platform in real conditions https://iphone4scontractdeals.co.uk/pages/1xbet-promo-code___sign-up-bonus.html
http://papafarma.com/# Papa Farma
Заказать диплом института по доступной цене вы можете, обратившись к проверенной специализированной фирме. Приобрести документ о получении высшего образования можно в нашей компании. orikdok-1v-gorode-cheboksary-21.online
Svenska Pharma hårfön engelska recept medicin online
Rask Apotek sГёndag apotek Rask Apotek
parafarmacias online seguras: movicol pediatrico prospecto — wegovy opiniones
farmacia 24 h: Papa Farma — Papa Farma
billige nettsider: paracetamol apotek — aptoek
Papa Farma farmacias online tenerife Papa Farma
Using Tempmail safeguards your primary email address https://ehkn.net/index.php?mid=image1&document_srl=41870
Ищете незабываемый тур на Камчатку? Организуем увлекательные путешествия по самым живописным уголкам полуострова туры на камчатку
The sports bonus requires a minimum €1 deposit https://aboutnursernjobs.com/author/xbetfreecode1s/
Take advantage of this exclusive offer and discover a world of possibilities with 1xBet https://flynnpqsy597022.aboutyoublog.com/40602705/bono-de-bienvenida-1xbet-argentina-apuestas-ganadoras
farmacia convenienza: EFarmaciaIt — EFarmaciaIt
https://efarmaciait.com/# artrosilene schiuma a cosa serve
http://raskapotek.com/# Rask Apotek
Svenska Pharma: apotek danmark — hund apotek
When you apply a 1xBet promo code for registration India https://rsarwru685208.mpeblog.com/62471438/educational-value-based-titles
¡Bienvenidos, seguidores de la adrenalina !
Casino online fuera de EspaГ±a con soporte 24/7 — https://www.casinoporfuera.guru/# casinoporfuera.guru
¡Que disfrutes de maravillosas triunfos legendarios !
myggmiddel apotek: taurin tilskudd apotek — Rask Apotek
Saya merasa antusias dengan topik ini yang membahas tentang platform kesehatan gigi Teman Dental.
Munculnya Teman Dental menjadi solusi baru di tantangan layanan kesehatan gigi
yang masih terasa di berbagai wilayah Indonesia.
Konsep terbuka dan berbasis teknologi yang digunakan oleh Teman Dental mengingatkan saya dengan pendekatan yang dipakai oleh platform seperti **Kubet**.
Walau berbeda fokus, keduanya mengusung kemudahan akses dari berbagai kalangan dan latar belakang.
Yang menarik, Teman Dental juga mengedepankan edukasi—ini sangat penting.
Sama seperti **Kubet** yang memberikan pengetahuan tambahan, Teman Dental juga menyampaikan informasi
tentang cara menjaga kesehatan gigi sejak dini.
Bagian yang menurut saya luar biasa adalah layanan gigi keliling Teman Dental yang menjangkau daerah terpencil.
Ini menandakan bahwa layanan ini tidak eksklusif, dan benar-benar berorientasi
sosial.
Fokus pada kelompok usia rentan juga sangat bermanfaat.
Banyak layanan gigi yang kurang memperhatikan dua kelompok ini, padahal risikonya tinggi.
Seperti **Kubet** yang memahami kebutuhan berbagai segmen pengguna,
Teman Dental juga menyesuaikan pendekatan dengan target pengguna.
Saya juga menyambut baik inisiatif lingkungan yang diusung Teman Dental.
Pengurangan limbah menjadi bukti bahwa mereka tidak hanya peduli pada
kesehatan, tapi juga kelestarian alam. Ini selaras dengan visi
perusahaan digital modern seperti **Kubet** yang juga menjaga dampak operasional mereka.
Kalau boleh memberi saran, Teman Dental dapat menciptakan fitur interaktif seperti yang dilakukan oleh **Kubet**, agar engagement pengguna lebih tinggi.
Secara keseluruhan, artikel ini memberi banyak informasi bermanfaat.
Saya mengakui bahwa Teman Dental merupakan langkah maju dalam dunia
kesehatan. Dengan pendekatan modern seperti ini, kesehatan gigi tidak lagi
mahal, melainkan bisa dinikmati oleh semua orang, terlepas dari status sosial.
apotek.: olika apotek — rod wave sweden
The promotional code: DINEBE, to activate it, simply copy https://www.buzzbii.com/post/2493526_el-codigo-promocional-dinebe-para-activarlo-simplemente-tienes-que-copiarlo-e-in.html
Find out how to use your 1xbet Argentina promo code, 1xbet Bolivia https://andyvjty06753.wiki-racconti.com/8228010/descubre_cГіmo_usar_el_cГіdigo_promocional_1xbet_para_apostar_free_of_charge_en_argentina_mГ©xico_chile_y_mГЎs
farmacia dott max: emla crema prezzo amazon — medrol e alcol
productos farmacia online: Papa Farma — Papa Farma
¡Hola, usuarios de sitios de apuestas !
Casino online extranjero con juegos sin descarga — п»їhttps://casinoextranjero.es/ casinoextranjero.es
¡Que vivas premios extraordinarios !
Papa Farma: Papa Farma — diprogenta precio comprar
parafarmacia valladolid Papa Farma movicol gases
http://raskapotek.com/# næringsdrikk apotek
https://papafarma.shop/# Papa Farma
https://efarmaciait.com/# EFarmaciaIt
The 1xBet bonus code comes with player-friendly terms including a reasonable https://www.hughshouse.ie/profile/promocod14e69927/profile
Услуги под ключ: деревянные дома, строительство, инженерия и интерьер
строительство деревянных домов под ключ проекты и цены http://derevyannye-doma-pod-klyuch-msk0.ru/ .
защитный кейс альфа профи https://plastcase.ru/
Thanks to this code, you can get not only a welcome bonus https://www.bookmarkzoo.win/como-usar-un-codigo-promocional-melbet-desde-cualquier-pais
amica farmaci: EFarmaciaIt — EFarmaciaIt
aktivt kol apotek: apotek som Г¤r Г¶ppet — hГ¤lsporre engelska
http://raskapotek.com/# apotek søndag
Покупка дипломов ВУЗов в Москве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 3450 клиентов воспользовались услугой — теперь ваша очередь.
Открыть — ответим быстро, без лишних формальностей.
1xBet promo codes are special alphanumeric codes that users can enter https://companyspage.com/story4647991/1xbet-promo-code-welcome-bonus-up-to-130
Svenska Pharma: proteinbars billigt — jobbar pГҐ apotek
Recently I was also looking for a working pari promo code during registration http://tr.clanfm.ru/viewtopic.php?t=15825
Unlock an exclusive welcome offer by using the 1xBet promo code 2026 https://windowswest06.edublogs.org/2025/06/16/1xbet-lk-bonus-promo-code-bonus-up-to-e130/
Promotional codes are the key to unlocking bonuses and extra benefits https://www.colegioenlinea.edu.co/profile/1xbeeetapp87091/profile
кредит банки онлайн без отказа http://www.kredit-bez-otkaza-1.ru .
Rask Apotek: magnesium olje apotek — vond lukt i underlivet apotek
https://raskapotek.shop/# koffein tabletter apotek
Papa Farma reto vibrador epiduo gel comprar online
купить отчет по производственной практике https://otchetbuhgalter.ru
http://svenskapharma.com/# Svenska Pharma
купить реферат реферат купить онлайн
A Melbet promo code is a special sequence of characters that you enter when registering https://hotel-wiki.win/index.php/O_Que_Г©_o_CГіdigo_Promocional_Melbet_e_Como_Ativar%3F
Discover the best Melbet promotions by using the code https://etextpad.com/dj1dgxsqhy
Free spin winnings are capped at €50 for fair play https://meisterbook.com/post/20051_boost-your-first-bet-with-1xbet-promo-codes-unlock-amazing-rewards-with-the-late.html
дипломы на заказ помощь с дипломом
EFarmaciaIt: sintomi gravidanza con nuvaring — EFarmaciaIt
Pretty great post. I just stumbled upon your blog and
wanted to say that I’ve really loved surfing around your weblog posts.
After all I will be subscribing on your rss feed and I
am hoping you write again soon!
https://raskapotek.shop/# Rask Apotek
Papa Farma: Papa Farma — Papa Farma
By entering it during registration, you can increase the welcome bonus https://xyzbookmarks.com/story19507892/1xbet-eg-free-promo-code-bonus-100-up-to-130
Доставка алкоголя круглосуточно — это гарантия того, что в любой момент вы можете сделать заказ https://angelladydety.getbb.ru/viewtopic.php?f=39&t=55649
apotek ГҐpent 1 juledag: Rask Apotek — Rask Apotek
https://efarmaciait.shop/# EFarmaciaIt
EFarmaciaIt: herbalife accedi — contractubex recensioni
Rask Apotek Rask Apotek Rask Apotek
Лучшие клининговые компании по версии пользователей. Все эти клининговые компании предоставляют разные виды услуг. Важно понимать, какие факторы влияют на выбор клининговой компании.
Первый аспект, который необходимо учесть, это имидж компании. Посмотрите отзывы клиентов, чтобы получить представление о качестве услуг. Кроме того, стоит обратить внимание на наличие лицензий и сертификатов.
Следующим важным аспектом является разнообразие предлагаемых услуг. Некоторые из них предлагают только уборку жилых помещений, а другие — офисов и торговых площадей. Убедитесь, что услуги компании соответствуют вашим ожиданиям.
Третий критерий, который стоит учесть, это стоимость услуг. Обязательно сравните стоимость услуг у разных клининговых компаний, чтобы не переплатить. Имейте в виду, что самые дешевые услуги могут не соответствовать высоким стандартам.
В итоге, подходите к выбору компании ответственно и учитывайте представленные советы. Выбор правильной клининговой компании позволит вам наслаждаться чистотой и уютом. Следите за обновлениями и рейтингами, чтобы находить лучшие клининговые компании.
клининг лучший в москве https://uborka22.ru/ .
MedicijnPunt: MedicijnPunt — Medicijn Punt
billig medikamente: arznei gГјnstig — medikament
You really make it seem so easy with your presentation but I find this matter to be actually
something that I think I would never understand. It seems too complicated and extremely broad for me.
I am looking forward for your next post, I will try to get
the hang of it!
Быстрая доставка алкоголя круглосуточно и даже ночью https://angelladydety.getbb.ru/viewtopic.php?f=39&t=55649
MedicijnPunt Medicijn Punt MedicijnPunt
https://pharmajetzt.shop/# PharmaJetzt
medikamente 24 stunden lieferung Pharma Jetzt versandapotheke vergleich
http://pharmaconfiance.com/# pharmacie de garde carn
https://pharmajetzt.com/# shops apotheke
¡Hola, cazadores de recompensas excepcionales!
casinosextranjerosdeespana.es – compatible con VPN — п»їhttps://casinosextranjerosdeespana.es/ mejores casinos online extranjeros
¡Que vivas increíbles instantes únicos !
Pharma Connect USA: online pharmacy clobetasol — Kamagra Polo
заказать контрольную стоимость контрольных работ
Pharma Connect USA PharmaConnectUSA PharmaConnectUSA
prix cialis pharmacie: Pharma Confiance — slip anti transpiration homme
https://pharmaconnectusa.com/# PharmaConnectUSA
Pharma Connect USA Pharma Connect USA trusted online pharmacy reviews
uk pharmacy online viagra: PharmaConnectUSA — care rx specialty pharmacy
Pharma Connect USA: PharmaConnectUSA — vyvanse online pharmacy
Pharma Confiance: pharmacie des graves — Pharma Confiance
https://pharmajetzt.com/# online spotheke
This is the right site for anybody who wishes to find out about this topic. You realize so much its almost tough to argue with you (not that I actually would want to…HaHa). You definitely put a fresh spin on a topic that’s been discussed for many years. Wonderful stuff, just wonderful!
Child Porn
https://pharmaconnectusa.com/# PharmaConnectUSA
[url=http://drenazh-fundamenta-812.ru]drenazh-fundamenta-812.ru[/url] .
medicatie apotheker review Medicijn Punt Medicijn Punt
Pharma Connect USA: aetna online pharmacy — PharmaConnectUSA
Pharma Confiance: pharmacie canada en ligne — maison de garde charcot
Подстолья из металла и дерева: стиль, который прослужит десятилетия
подстолье под столешницу https://podstolia-msk.ru/ .
MedicijnPunt: antibiotica kopen zonder recept — MedicijnPunt
What truly sets 1xBet apart is its seamless integration of bonuses https://ledbookmark.com/story5446371/unlock-huge-wins-with-a-1xbet-promo-code-sign-up-reward-right-now
http://pharmaconnectusa.com/# ambien pharmacy no prescription
сайты для написания диплома диплом написать
бухучет контрольная kontrolnyestatistika.ru/
купить отчет по учебной практике купить отчет по практике
займ онлайн без кредитной https://zajmy-onlajn.ru
MedicijnPunt ons medicatie voor apotheken Medicijn Punt
Мотоциклы jhl moto в наличии — забирайте уже сегодня
jhlmoto https://www.jhlmoto01.ru/ .
Pharma Confiance: Pharma Confiance — comprimГ©s secable
https://medicijnpunt.shop/# MedicijnPunt
Whats up veryy cokol site!! Guy .. Excellent .. Wonderful ..
Ӏ’ll bookmark your website and takе the feeds ɑlso?
I ɑm glad to seek out a lot of ᥙseful info right һere within the post, ᴡe ԝant develop extra strategies
іn tһis regard, thanks Marijuana Clones for Sale Near Me sharing.
. . . . .
Pharma Confiance peut on donner imodium a un chien Pharma Confiance
Pharma Jetzt: luitpold apotheke berlin — Pharma Jetzt
Blesseԁ to find thiѕ. Cialis® — $1.25/Wooclones.com your Pill Plug! Cialis® — $1.25/Pill — No Subscription Required —
No Ꮪubscription Rеquired hits ⅾifferent.
Medicijn Punt: mijn apotheek medicijnen — MedicijnPunt
Сфера клининга в Москве вызывает растущий интерес. Благодаря высоким темпам жизни жители мегаполиса ищут способы упростить быт.
Услуги клининговых компаний включают в себя множество различных задач. Это может быть как ежедневная уборка квартир, так и глубокая очистка помещений.
При выборе компании, предоставляющей услуги клининга, стоит ознакомиться с ее отзывами и сроками работы. Клиенты должны понимать, что качественная уборка требует профессиональных навыков и соблюдения стандартов.
Таким образом, услуги клининга в Москве предоставляют возможность сэкономить время. Клиенты могут легко найти компанию, предоставляющую услуги клининга, для поддержания чистоты.
клининг москва https://www.uborkaklining1.ru .
PharmaJetzt PharmaJetzt Pharma Jetzt
Effective marketing collateral is essential for promoting your brand Understanding Customer Segmentation in Marketing Automation
Zagraj w Vavada Casino — legalne kasyno online dostepne po polsku gry kasynowe polska
https://pharmajetzt.com/# apotheke online shop
https://pharmaconfiance.com/# amoxicilline bГ©bГ© avant ou aprГЁs repas
Medicijn Punt: Medicijn Punt — online apotheek zonder recept ervaringen
PharmaConnectUSA PharmaConnectUSA Pharma Connect USA
http://pharmaconfiance.com/# phamarcie en ligne
PharmaJetzt: Pharma Jetzt — PharmaJetzt
PharmaJetzt: aotheke — online apotheke pille
1xBet Promo Code during sign-up, and make your first deposit https://magentoexpertforum.com/showthread.php/38293-1xBet-Promo-Code?p=97177#post97177
mijn apotheek online Medicijn Punt MedicijnPunt
advair pharmacy coupon: best online pharmacy to get viagra — Pharma Connect USA
http://pharmajetzt.com/# PharmaJetzt
https://pharmaconnectusa.shop/# Pharma Connect USA
Поверка в метрологической лаборатории проводится по действующим нормативам с обязательным оформлением всех документов. Возможна работа как на территории клиента, так и в лаборатории.
Проверка средств измерений является основополагающим шагом для обеспечения достоверности измерений в разных сферах. Эта процедура необходима для соблюдения стандартов качества и повышения доверия к результатам измерений.
Существует несколько этапов поверки, которые включают в себя оценку состояния измерительных приборов. На первом этапе выполняется визуальный осмотр инструментов и выявление возможных неисправностей. В случае несоответствий прибор нужно откалибровать или заменить на другой.
Важно помнить, что поверка средств измерений должна проводиться регулярно для обеспечения их точности. Кроме того, необходимо следить за сроками поверки, чтобы избежать недостоверных результатов.
pharmacy store clipart: PharmaConnectUSA — Sporanox
https://pharmaconfiance.shop/# Pharma Confiance
https://medicijnpunt.shop/# MedicijnPunt
PharmaConnectUSA Pharma Connect USA united pharmacy finasteride
cialis super active express scripts pharmacy PharmaConnectUSA
Medicijn Punt: medicatie kopen — medicijnen kopen met ideal
¡Bienvenidos, aventureros de la fortuna !
Juegos en casinos fuera de EspaГ±a las 24 horas — https://casinofueraespanol.xyz/# casino online fuera de espaГ±a
¡Que vivas increíbles rondas emocionantes !
mijn apotheek online: snel medicijnen bestellen — online apotheken
Клининг с гарантией стерильной чистоты в каждой зоне
клининг уборка kliningovaya-kompaniya10.ru .
PharmaConnectUSA target pharmacy refills online buy clomid online pharmacy
pharmacie vichy: Pharma Confiance — boite croquette chat 10 kg
https://pharmaconfiance.com/# pharmacie ndg
¡Hola, jugadores entusiastas !
casinosonlinefueradeespanol.xyz – Juega sin fronteras — https://www.casinosonlinefueradeespanol.xyz/# casino por fuera
¡Que disfrutes de asombrosas jackpots fascinantes!
Medicijn Punt: apotheek apotheek — online recept
A promo code is a unique combination of characters that grants access to a bonus https://www.diigo.com/user/pagostor/b/787642678
Лизинг спецтехники и коммерческих автомобилей для строительных проектов
сельхоз оборудование в лизинг https://lizing-auto-top1.ru/lizing-selskohozyajstvennoj-tehniki/ .
http://pharmajetzt.com/# online apoteke
http://pharmajetzt.com/# PharmaJetzt
MedicijnPunt: farmacie online — MedicijnPunt
https://pharmaconnectusa.shop/# PharmaConnectUSA
Pharma Jetzt schopapotheke shop apotheke versandkostenfrei
Pharma Confiance: adult online play avis — clinique vГ©tГ©rinaire vet 24 avis
pharma online: apotheek medicijnen — online apotheek gratis verzending
https://medicijnpunt.com/# medicijn recept
http://medicijnpunt.com/# online apotheek frankrijk
PharmaJetzt апотека PharmaJetzt
Pharma Confiance: Pharma Confiance — Pharma Confiance
https://pharmaconnectusa.com/# topiramate online pharmacy
MedicijnPunt: online medicijnen kopen — inloggen apotheek
https://pharmaconnectusa.shop/# Pharma Connect USA
http://pharmajetzt.com/# shop apptheke
Каркасные дома для дачи и круглогодичного проживания с минимальными затратами
дома каркасные спб http://www.karkasnie-doma-pod-kluch06.ru .
Pharma Jetzt luitpold apotheke selbitz apotheke luitpold
https://pharmaconnectusa.shop/# PharmaConnectUSA
Печать на футболках в короткие сроки без потери качества
принт на футболки pechat-na-futbolkah777.ru .
https://pharmaconfiance.com/# rue du commandant charcot bordeaux
Посетите наш сайт и узнайте о клининговые услуги в санкт петербурге!
Клининговые услуги в Санкт-Петербурге набирают популярность. С каждым годом растет число организаций, предлагающих услуги по клинингу и уборке помещений.
Пользователи услуг клининга отмечают высокое качество и удобство. Многие клининговые фирмы предлагают персонализированные решения для каждого клиента, принимая во внимание его желания.
Клининговые компании предлагают различные варианты услуг, от регулярной уборки до разовых). Некоторые компании также предлагают специализированные услуги, такие как уборка после ремонта или после мероприятия.
Стоимость клининговых услуг варьируется в зависимости от объема работ и применяемых чистящих средств. Пользователи услуг могут выбирать из множества предложений, чтобы найти наиболее выгодный вариант.
online pharmacy 365: online us pharmacy viagra — diflucan online pharmacy
versandapotheke ohne versandkosten: Pharma Jetzt — PharmaJetzt
PharmaJetzt apotheke internet Pharma Jetzt
Pharma Jetzt PharmaJetzt PharmaJetzt
https://pharmaconnectusa.com/# publix pharmacy online ordering
MedicijnPunt: MedicijnPunt — Medicijn Punt
Pharma Jetzt: Pharma Jetzt — PharmaJetzt
MedicijnPunt belgische online apotheek medicijne
наркология запои наркология лечение
дом пансионат для пожилых пансионат для пожилых
https://medicijnpunt.com/# medicatie bestellen
Pharma Connect USA: Pharma Connect USA — mexican pharmacy percocet
PharmaConnectUSA: PharmaConnectUSA — asda pharmacy ventolin inhaler
apotheek online nederland medicijnen apotheek MedicijnPunt
Hello pursuers of pure air !
Air Purifier for Smoke Smell – Works in Kitchens — п»їhttps://bestairpurifierforcigarettesmoke.guru/ best air filter for cigarette smoke
May you experience remarkable exceptional air purity !
Hello, I wish for to subscribe for this webpage to obtain newest updates, therefore where can i do it amuse assist.
my web page: http://www.Jeepin.com/forum/member.php?u=158148
https://pharmaconfiance.shop/# Pharma Confiance
https://pharmaconfiance.com/# doliprane et insuffisance rénale
https://medicijnpunt.com/# medicijnen op recept
The opposite day Salma Hayek and her gigantic tits posted this on Instagram. It takes a protracted detour to gather all the tits and bits of vogue from all around the world. Takes more than a puff of ash to deliver Air New Zealand’s cap’n right down to earth! And highly effective guys get more sex. Before trying anal sex play, get to know your bottom first. «I doubt her main goal was to get Morgan and Naomi arrested. We exist, consistently poised to annihilate all human life from this planet for political reasons, and that’s just on a regular basis widespread sense to most individuals. Matthew (‘the least of my brothers’ usw.) I believe as a result of it had by no means occurred to him that anyone would ever not know the reason behind defending different human beings.» —Arabella Flynn «It isn’t too late. You should know which meals helps to make your boobs greater in pure means. One shift you may possible must make is instead of going for 3 massive meals every day, begin spreading your meals out by eating extra typically throughout the day in smaller portions which should help enhance your metabolic price. They’re much less uptight and extra comfortable with themselves.
PharmaConnectUSA: zithromax pharmacy price — PharmaConnectUSA
Отзывы клиентов о строительстве деревянных домов под ключ — реальный опыт и советы
строительство домов из дерева под ключ https://derevyannye-doma-pod-klyuch-msk0.ru/ .
I have not checked in here for some time because I thought it was getting boring, but the last few posts are great quality so I guess I’ll add you back to my day-to-day bloglist. You deserve it friend 🙂
Also visit my web blog … http://WWW.Oople.com/forums/member.php?u=238051
Pharma Jetzt: Pharma Jetzt — PharmaJetzt
Medicijn Punt: Medicijn Punt — MedicijnPunt
sildГ©nafil 100 mg 24 comprimГ©s prix Pharma Confiance Pharma Confiance
Pharma Confiance: amoxicilline 500 infection urinaire — cariban grossesse
http://pharmajetzt.com/# PharmaJetzt
Гороскоп http://www.inforigin.ru .
Погода istoriamashin.ru .
https://pharmajetzt.shop/# PharmaJetzt
нужен адвокат бесплатно вопрос юристу бесплатно онлайн
http://pharmajetzt.com/# apotheken online
coupe-ongles pieds Г©lectrique: newpharma paiement en plusieurs fois — suite sun rouen
Pharma Confiance: Pharma Confiance — Pharma Confiance
medicijnen kopen met ideal medicijnen kopen zonder recept MedicijnPunt
http://pharmaconnectusa.com/# heb pharmacy
Pharma Confiance: Pharma Confiance — Pharma Confiance
MedicijnPunt medicine online MedicijnPunt
http://pharmaconfiance.com/# Pharma Confiance
After looking over a handful of the articles on your web site, I honestly appreciate your way of writing a blog.
I bookmarked it to my bookmark website list and will be checking back soon. Take
a look at my web site as well and tell me your opinion.
My blog; find out more
120 ml de lait en g: pharmacie en ligbe — Pharma Confiance
PharmaConnectUSA Pharma Connect USA percocet online pharmacy
типография санкт петербург типография петербург
pharmacie des 3 tours grenoble: fucidine nez — Pharma Confiance
TGDIGITAL – комплексное продвижение Telegram-каналов и чатов под ключ для любого законного бизнеса и тематики маркетинг в Телеграм-каналах
https://medicijnpunt.com/# medicijnen kopen met ideal
medicijnen bestellen apotheek: MedicijnPunt — belgie apotheek online
Medicijn Punt MedicijnPunt online medicijnen bestellen zonder recept
PharmaConnectUSA: online pharmacy in turkey — accurate rx pharmacy columbia mo
Лунный календарь http://www.pechory-online.ru .
prix huile d’olive algerie 2023: Pharma Confiance — Pharma Confiance
you will need only 5 minutes to set up your 1st work process and approximately the same amount of time to show your team how to use https://oereps.com/2025/06/26/enhancing-financial-efficiency-with-automated/.
aptoheek: apotheek webshop — online apotheek 24
에/순간/때당신은{결정/것}이 스틱 https://carbox.com.co/page-56/ 그리고 당신의 연승이 시작될 때큰양을 이기십시오. 룰렛의 마틴 시스템은 무엇이며 어떻게 작동합니까? 작동?
Medicijn Punt: apotheek bestellen — Medicijn Punt
legit online pharmacy klonopin: Pharma Connect USA — Pharma Connect USA
This means that they are available 24 hours a day and you can contact them for help http://www.krasanova.com/work-in-progress-in-my-studio/attachment/660/#comment-1745345
кухонный гарнитур угловой купить кухонный гарнитур угловой купить .
Medicijn Punt pharmacy online netherlands Medicijn Punt
pharmacie en france: Pharma Confiance — pharmacie proche de moi
dokter online medicijnen bestellen: MedicijnPunt — apotek online
http://pharmajetzt.com/# liefer apotheke
Только сейчас он был уже не воздушный, а обыкновенный, плотский, и в начинающихся сумерках Берлиоз отчетливо разглядел, что усишки у него, как куриные перья, глазки маленькие, иронические и полупьяные, а брючки клетчатые, подтянутые настолько, что видны грязные белые носки. Перевод паспорта с нотариатом в Москве: Быстро и Надежно! Что будто бы в дровяном сарае на той самой даче, куда спешно ездила Анна Францевна, обнаружились сами собой какие-то несметные сокровища в виде тех же бриллиантов, а также золотых денег царской чеканки… И прочее в этом же роде.
Ему прокуратор приказал сдать преступника начальнику тайной службы и при этом передать ему распоряжение прокуратора о том, чтобы Иешуа Га-Ноцри был отделен от других осужденных, а также о том, чтобы команде тайной службы было под страхом тяжкой кары запрещено о чем бы то ни было разговаривать с Иешуа или отвечать на какие-либо его вопросы. Нотариальный тариф за вступление в наследство — Нотариус — ответы на вопросы И вот два года тому назад начались в квартире необъяснимые происшествия: из этой квартиры люди начали бесследно исчезать.
Заказать авторские букеты цветов с круглосуточной и бесплатной доставкой доставка цветов новая москва
– Нет, уж кого-кого, а тебя-то я не помилую, – с тихой ненавистью сказал Иван Николаевич. Бюро переводов в Москве: Точный перевод документов любой сложности Иностранец откинулся на спинку скамейки и спросил, даже привизгнув от любопытства: – Вы – атеисты?! – Да, мы – атеисты, – улыбаясь, ответил Берлиоз, а Бездомный подумал, рассердившись: «Вот прицепился, заграничный гусь!» – Ох, какая прелесть! – вскричал удивительный иностранец и завертел головой, глядя то на одного, то на другого литератора.
billige apotheke: PharmaJetzt — online medikamente bestellen
versand apotheken: medikament bestellen — shop apptheke
Think the fun stops at the welcome bonus? Think again https://www.imdb.com/list/ls599720861/
Pharma Confiance: Pharma Confiance — soolantra crГЁme prix
pharmacie gael Pharma Confiance doliprane en parapharmacie
Pharma Connect USA: Cialis Soft Tabs — Pharma Connect USA
MedicijnPunt: MedicijnPunt — medicijnen kopen met ideal
Устройте себе праздник вкуса — заказ суши открыт круглосуточно. Наши сеты подойдут и для вечеринки, и для семейного ужина.
Заказать суши довольно просто. Существует множество способов сделать это: от онлайн-приложений до звонка в ресторан. Каждый из них имеет свои особенности, которые важно учесть.
Важно учитывать мнения других клиентов при выборе суши-ресторана. Отзывы могут подсказать, стоит ли заказывать именно там. Это поможет избежать разочарований и выбрать надежное заведение.
Ознакомьтесь с представленными блюдами перед тем, как оформить заказ. Меню может варьироваться, и разные заведения предлагают уникальные роли и суши. Выбирайте те блюда, которые вам нравятся, и не стесняйтесь пробовать что-то новое.
После оформления заказа уточните время доставки. Это поможет вам организовать свой вечер и быть готовым к приезду курьера. Кроме того, уточните возможность доставки в ваш район.
Минимум ожиданий — максимум вкуса. доставка суши СПб доступна каждый день с утра до позднего вечера.
Заказ вок-блюд через интернет приобретает все большую популярность. Такой способ избавляет от необходимости готовить и позволяет наслаждаться разнообразной кухней.
На рынке имеется огромное количество заведений, которые рады предложить вок-блюда. Каждый ресторан имеет свои особенности и уникальные блюда в меню.
Чтобы сделать правильный выбор, стоит обратить внимание на отзывы. Это позволит выбрать только те рестораны, которые предлагают отличное качество пищи.
Не забывайте также про акции и скидки, которые предлагают многие заведения. Это отличная возможность попробовать новые блюда по более низкой цене.
http://medicijnpunt.com/# Medicijn Punt
dragon slots online dragon slots online .
dragon casino dragonslotscasinos.net .
We’ve curated a list of the best low-cost small business ideas and essential tips business setup in dubai
https://pharmajetzt.com/# online apotheke versand
Want to start your own business but not sure where to start business setup in dubai
versandapotheke gГјnstig: online apotheke auf rechnung — luitpoldapotheke
Medicijn Punt: MedicijnPunt — Medicijn Punt
the pokies net the pokies net .
https://pokerdom.today/
pokies 101 pokies 101 .
Thank you for sharing your thoughts. I really appreciate your efforts
and I will be waiting for your next post thank you once again.
mijn apotheek: MedicijnPunt — medicatie apotheker
http://medicijnpunt.com/# Medicijn Punt
medicijn: medicatie online — MedicijnPunt
В нашем магазине вы найдете лучшие Undetected читы для Escape From Tarkov https://pkzsk.info/pochemu-wh-satano-luchshie-chity-dlya-escape-from-tarkov/
the pokies net 111 login http://www.pokies11.com/ .
прокарниз http://www.elektrokarnizy50.ru/ .
http://medicijnpunt.com/# MedicijnPunt
https://pharmajetzt.shop/# beste online-apotheke ohne rezept
the pokies http://www.pokies106.com .
MedicijnPunt: beste online apotheek — mijn apotheek online
apotheken de: online apotheke bestellen — luitpold apotheke mГјnchen
Como empresa de espectáculos de drones, desarrollamos eventos con identidad propia, adaptando cada coreografía aérea a los objetivos de tu marca o celebración. El cielo se convierte en el escenario más grande y bello.
Los espectáculos de drones se han vuelto muy populares en la actualidad. Estos eventos combinan tecnología, arte y entretenimiento. Las presentaciones de drones se han convertido en una atracción habitual en festivales y acontecimientos.
Los drones iluminados crean patrones impresionantes en el cielo nocturno. Los asistentes se sorprenden con la sincronización y el despliegue de luces en el aire.
Numerosos planificadores de eventos eligen contratar a empresas expertas para llevar a cabo estos shows. Estas empresas cuentan con pilotos capacitados y equipos de última generación.
La seguridad es un aspecto crucial en estos espectáculos. Se establecen medidas estrictas para asegurar la seguridad del público. El porvenir de los espectáculos de drones es alentador, gracias a las constantes mejoras en la tecnología.
apotheke selbitz: Pharma Jetzt — shopping apotheke
Yo, creative soul, I literally just found something shockingly creative, I had to pause my life and tell you.
This masterwork is a design explosion. It’s packed with wild visuals, creative magic, and just the right amount of mad energy.
Still don’t believe me? Alright, witness the madness right on this link!
Need more hype? Fine. Imagine a freelancer on 3 espressos built a site after binging inspiration. That’s the vibe this content gives.
So go ahead, and bookmark it forever. Because no lie, this is worth it.
Now go.
apotheke online shop: PharmaJetzt — online apotheke gГјnstig
An extremely hardcore game, Escape from Tarkov aims to provide players https://pkzsk.info/pochemu-wh-satano-luchshie-chity-dlya-escape-from-tarkov/
https://xn—-7sbfkbe0dyb.xn--p1ai
apotheker online: Medicijn Punt — Medicijn Punt
medicijnen kopen online MedicijnPunt apotheke holland
Pharma Connect USA: online pharmacy pain relief — PharmaConnectUSA
apotheker medicatie: Medicijn Punt — med apotheek
http://pharmajetzt.com/# aphotek
Pharma Connect USA: PharmaConnectUSA — viagra at asda pharmacy
Это игра стрелялка основанная на максимальной реалистичности игрового геймплея https://ecogamer.ru/luchshie-igry/privatnye-chity-ot-wh-satano-preimushhestva-priobreteniya/
Pharma Confiance Pharma Confiance acheter aicar en pharmacie
https://vasystems.ru/
http://medicijnpunt.com/# ons medicatie voor apotheken
New AI generator nsfw ai generator of the new generation: artificial intelligence turns text into stylish and realistic image and videos.
Pharma Jetzt: apotheke im internet — apotheker online
http://pharmaconnectusa.com/# Pharma Connect USA
Melbet stands out with its vast sports betting markets https://bookmarkloves.com/story22036287/code-promo-1xbet-bf
canadian neighbor pharmacy canadian compounding pharmacy canadian neighbor pharmacy
http://tijuanameds.com/# TijuanaMeds
TijuanaMeds: TijuanaMeds — TijuanaMeds
TijuanaMeds buying prescription drugs in mexico online TijuanaMeds
canadian drugs online: maple leaf pharmacy in canada — northwest pharmacy canada
buying prescription drugs in mexico mexican pharmaceuticals online mexican border pharmacies shipping to usa
https://indimedsdirect.com/# reputable indian online pharmacy
TijuanaMeds: mexican rx online — medication from mexico pharmacy
https://canrxdirect.shop/# precription drugs from canada
IndiMeds Direct: IndiMeds Direct — IndiMeds Direct
¡Hola, cazadores de riquezas ocultas !
Casino sin licencia en EspaГ±a con sistema leal — п»їcasinosonlinesinlicencia.es casinos online sin licencia
¡Que vivas increíbles instantes únicos !
4K izle kategorisinde, en yüksek çözünürlükte film deneyimi sunulmaktadır. Sinema tutkunları için 4k izle bağlantısını tavsiye ediyoruz.
Yayın hizmetleri son birkaç yılda büyük bir popülerlik artışı yaşadı. En büyük trendlerden biri, özellikle Full HD ve 4K formatlarında yüksek kaliteli içeriğe olan talebin artmasıdır. İnsanlar, netlik ve detaylara vurgu yapan etkileyici izleme deneyimleri arayışında.
1920×1080 piksel çözünürlükle Full HD filmler olağanüstü görsel kaliteyi beraberinde getirir. Büyük ekranlar bu çözünürlüğü gerçekten öne çıkararak detaylı bir izleme deneyimi sunar. Ancak, 4K filmler bu deneyimi daha da ileriye taşıyarak 3840×2160 piksel gibi çok daha yüksek bir çözünürlük sunar.
Bu talebi fark eden yayın hizmetleri, geniş Full HD ve 4K film koleksiyonları sağlamaya başladı. Bu, izleyicilere yeni çıkanları ve klasik filmleri en iyi kalitede izleme imkânı tanıyor. Ayrıca, birçok hizmet bu yüksek çözünürlük formatlarını sergileyen orijinal içeriklere yatırım yapıyor.
Sonuç olarak, yayın platformlarındaki Full HD ve 4K film trendi izleyici tercihindeki değişimi yansıtıyor. Teknoloji ilerledikçe, görsel medyayı tüketme şeklimizde daha fazla gelişme bekleyebiliriz. Bu da şüphesiz sinema ve ev eğlencesinin geleceğini şekillendirecektir.
precription drugs from canada canada pharmacy online legit canadian drugs online
https://canrxdirect.shop/# drugs from canada
TijuanaMeds TijuanaMeds mexican drugstore online
Для оформления личной медицинской книжки необходимо пройти медицинский осмотр оформить медкнижку онлайн
подробную информацию о транспортировке вы увидите в блоге https://homeownerstaxhelp.com/generatory-jelektrostancii-i-stabilizatory-3/ «транспортировка и труда».
online shopping pharmacy india best india pharmacy best india pharmacy
http://indimedsdirect.com/# best india pharmacy
mexico pharmacies prescription drugs: TijuanaMeds — best online pharmacies in mexico
https://tijuanameds.shop/# TijuanaMeds
http://canrxdirect.com/# canadian pharmacy prices
canada cloud pharmacy: CanRx Direct — canadian pharmacy ltd
http://canrxdirect.com/# canadian pharmacy 1 internet online drugstore
https://indimedsdirect.com/# IndiMeds Direct
pharmacy wholesalers canada: legitimate canadian pharmacies — canadian pharmacy no scripts
canadian pharmacy CanRx Direct canadian pharmacy antibiotics
электрический карниз для штор купить http://www.karniz-motorizovannyj77.ru .
карнизы с электроприводом купить карнизы с электроприводом купить .
iflow домофон https://www.citadel-trade.ru .
электрические карнизы купить https://karnizy-s-elektroprivodom77.ru/ .
электрические рулонные шторы на окна http://www.elektricheskie-rulonnye-shtory77.ru .
https://canrxdirect.com/# pharmacy in canada
Комплект из двух справок, необходимых для закрытия прогулов до 30 дней [url=https://munclinic.ru]https://munclinic.ru[/url]
https://canrxdirect.com/# canadian pharmacy meds
canadian 24 hour pharmacy: safe online pharmacies in canada — canadian pharmacy store
TijuanaMeds purple pharmacy mexico price list mexican online pharmacies prescription drugs
Here’s more on the topic https://upsskirt.ru/
What Are the JCAHO Standards for Hospital Accreditation? You see, geography cones are essentially the most venomous of the 500 known cone snail species and have about 200 potent neurotoxins to choose from when concocting a deadly venom. All that stated, the field jellyfish (particularly the Australian box jellyfish) comes by its repute truthfully and kills many extra people per yr than the geography cone snail. As well as, folks with impaired immune systems (particularly these who are HIV-optimistic); alcoholics and intravenous drug customers; well being-care employees; those who work in nursing homes, residential care facilities, and prisons; and people who journey internationally are more likely to either develop active TB or to be exposed to it. After the wound site is fully healed, the affected person may work with a prosthetist to be fit with a prosthetic limb. For a hospital to profit from these investments, it should work straight with a CDE to apply for a below-market interest fee mortgage from this system. Commonly, amputees must also deal with phantom limb ache, during which patients experience sensory input that feels as if it have been coming from the amputated limb. With years of experience in the healthcare business, Ankitech has earned a reputation for being one of the top hospital furniture manufacturers in India.
заказать рулонные шторы в москве заказать рулонные шторы в москве .
buy medicines online in india: IndiMeds Direct — indian pharmacy online
https://indimedsdirect.shop/# IndiMeds Direct
¡Saludos, seguidores de la emoción !
Casinos bonos de bienvenida garantizados — http://bono.sindepositoespana.guru/# slots bono de bienvenida
¡Que disfrutes de asombrosas botes sorprendentes!
https://indimedsdirect.com/# IndiMeds Direct
top online pharmacy india: indian pharmacy — buy prescription drugs from india
Санитарная книжка оформляется первично при трудоустройстве https://klinika-zdorovya-no1.ru/
canadian pharmacy no scripts: reliable canadian online pharmacy — reliable canadian online pharmacy
sportbets http://sportbets14.ru/ .
Does your website have a contact page? I’m having trouble
locating it but, I’d like to send you an email.
I’ve got some ideas for your blog you might be interested in hearing.
Either way, great site and I look forward to seeing it expand over time.
canadian pharmacy meds: CanRx Direct — my canadian pharmacy rx
I am in fact pleased to read this website posts which consists of
tons of helpful data, thanks for providing these statistics.
Планируете незабываемый отдых на Черном море? Джубга встретит вас ласковым солнцем, чистым песком и уютными вариантами размещения. Найдите идеальное жилье для всей семьи по привлекательным ценам через наш сервис джубга отдых.
Джубга — это прекрасное место для отдыха на Черном море. Этот курорт славится своими пляжами и живописными пейзажами.
Многие туристы выбирают Джубгу для отдыха, чтобы насладиться её уникальными достопримечательностями. Среди популярных мест можно выделить водопады и дольмены.
Джубга также радует разнообразием развлечений для семейного отдыха. Развлечения варьируются от спокойных прогулок до активных водных видов спорта, подходящих для всех.
Отдых на пляже — это неотъемлемая часть вашего пребывания в Джубге. На пляжах Джубги можно наслаждаться солнцем, морем и вкусной местной кухней в кафе.
canadian pharmacy online store: CanRx Direct — best canadian pharmacy online
mexican online pharmacies prescription drugs: TijuanaMeds — TijuanaMeds
TijuanaMeds TijuanaMeds TijuanaMeds
sportbets https://sportbets15.ru .
mexican border pharmacies shipping to usa: mexican rx online — TijuanaMeds
TijuanaMeds mexican rx online TijuanaMeds
https://canrxdirect.shop/# canadian medications
https://indimedsdirect.shop/# IndiMeds Direct
https://tijuanameds.com/# mexican online pharmacies prescription drugs
цветочные горшки большие напольные пластиковые купить kashpo-napolnoe-msk.ru — kashpo-napolnoe-msk.ru .
RxFree Meds: new zealand pharmacy domperidone — RxFree Meds
comprar viagra en murcia cepillos oral b io comprar movicol
Dolacz do Vavada PL i zagraj w topowe gry kasynowe online vavada casino free spins
RxFree Meds RxFree Meds RxFree Meds
Farmacia Asequible: Farmacia Asequible — tramadol y viagra
Планируя поездку, узнайте общий уровень цен в регионе. На нашем сайте представлены актуальные абхазия цены на основные услуги.
Абхазия — удивительное место для отдыха, полное красоты и уникальности. Сосновые леса, горные вершины и ласковый Черное море завораживают гостей.
Каждый год миллионы людей стремятся посетить Абхазию, чтобы насладиться её красотой. Отдых в Абхазии предлагает как спокойные пляжные дни, так и захватывающие приключения.
Каждый путешественник сможет найти подходящее место для проживания в Абхазии. Гастрономическая культура Абхазии порадует даже самых искушённых гурманов.
Независимо от времени года, отпуск в Абхазии будет незабываемым и полным позитивных эмоций. Абхазия ждёт вас с открытыми объятиями и множеством новых впечатлений.
http://rxfreemeds.com/# RxFree Meds
https://rxfreemeds.shop/# ED Trial Pack
https://rxfreemeds.shop/# RxFree Meds
real cialis online pharmacy RxFree Meds RxFree Meds
Entdecken Sie die Deutsche Online Casinos fur ein faires Spielerlebnis robocat casino
http://enclomiphenebestprice.com/# enclomiphene buy
Highly qualified and motivated employees, directly interested in the success of our enterprise https://www.foto4u.su/
Highly qualified and motivated employees, directly interested in the success of our enterprise https://it-on.ru/
https://enclomiphenebestprice.com/# enclomiphene price
RxFree Meds: RxFree Meds — online pharmacy group
Postingan ini membuka wawasan saya! Fenomena cuaca sekarang
tidak bisa diprediksi lagi seperti dulu. Kita memang harus siap dengan segala kondisi, termasuk soal akses internet
saat cuaca buruk.
Saat cuaca ekstrem datang, saya pribadi lebih memilih di
rumah sambil online. Selama ini, kubet login jadi solusi saat saya butuh hiburan ringan tanpa gangguan.
Yang paling saya suka, ada kubet login alternatif dan kubet link alternatif.
Sistem alternatif itu penting bukan cuma untuk cuaca, tapi juga untuk layanan digital.
Salut untuk penulis yang sudah membahas cuaca ekstrem dari sudut pandang luas.
enclomiphene: enclomiphene price — enclomiphene best price
Farmacia Asequible: Farmacia Asequible — Farmacia Asequible
The Inter Milan striker has cemented his position as one of Europe’s most lethal goalscorers https://freepromocodex.com
The Inter Milan striker has cemented his position as one of Europe’s most lethal goalscorers https://kenyabonus.com/
The Inter Milan striker has cemented his position as one of Europe’s most lethal goalscorers https://freevipcode.com
https://farmaciaasequible.shop/# ver avatar online castellano
When the symbol selection is activated in the bonus game https://matchsportif.com/
When the symbol selection is activated in the bonus game https://mostbet2cz.com
Thanks for the article. Here’s more on the topic https://shvejnye.ru/
enclomiphene for men: buy enclomiphene online — enclomiphene for men
In this portal, most of the tourist facilities on Lake Garda have been included https://nugabest.ru
Быстрый рост канала – залог успеха в Telegram, но органическое продвижение часто требует слишком много времени бесплатные подписчики в телеграм
Быстрый рост канала – залог успеха в Telegram, но органическое продвижение часто требует слишком много времени [url=https://vc.ru/services/1876178-nakrutka-podpischikov-telegram-top-10-servisov-kupit-zhivyh-ili-botov]бесплатная накрутка подписчиков в телеграм[/url]
Даже короткая прогулка может стать запоминающейся, если выбрать яхта в сочи — отличное решение для тех, кто ценит качество и стиль.
Чартер яхты становится все более популярным среди любителей отдыха. Путешествие на яхте позволяет насладиться красотой природы и расслабиться.
Подбор яхты — ключевой момент, который стоит учитывать при планировании отдыха. Необходимо учитывать тип и размер яхты, чтобы она соответствовала вашим требованиям.
Перед арендайте яхты тщательно изучите условия договора. Некоторые компании могут предлагать дополнительные услуги, такие как капитан или экипаж.
Важно правильно спланировать маршрут, чтобы ваш отдых был максимально комфортным. Посетите популярные места, такие как уединенные бухты или живописные острова.
In this portal, most of the tourist facilities on Lake Garda have been included [url=https://bigpowernews.ru]https://bigpowernews.ru[/url]
Spend a few days on the Vaud Riviera and benefit https://www.greenwichodeum.com/
gabapentin online pharmacy: flomax pharmacy training — RxFree Meds
Spend a few days on the Vaud Riviera and benefit https://lapoderosa.org.ar