 Подключить датчик атмосферного давления BMP280 к Orange Pi PC можно как по I2C, так и по SPI, благо их несколько у Orange Pi PC. Также для работы с GPIO необходимо установить WiringOP, если вы работаете с Orange Pi, а если у вас Banana Pi — BPI-WiringPi.
Подключить датчик атмосферного давления BMP280 к Orange Pi PC можно как по I2C, так и по SPI, благо их несколько у Orange Pi PC. Также для работы с GPIO необходимо установить WiringOP, если вы работаете с Orange Pi, а если у вас Banana Pi — BPI-WiringPi.
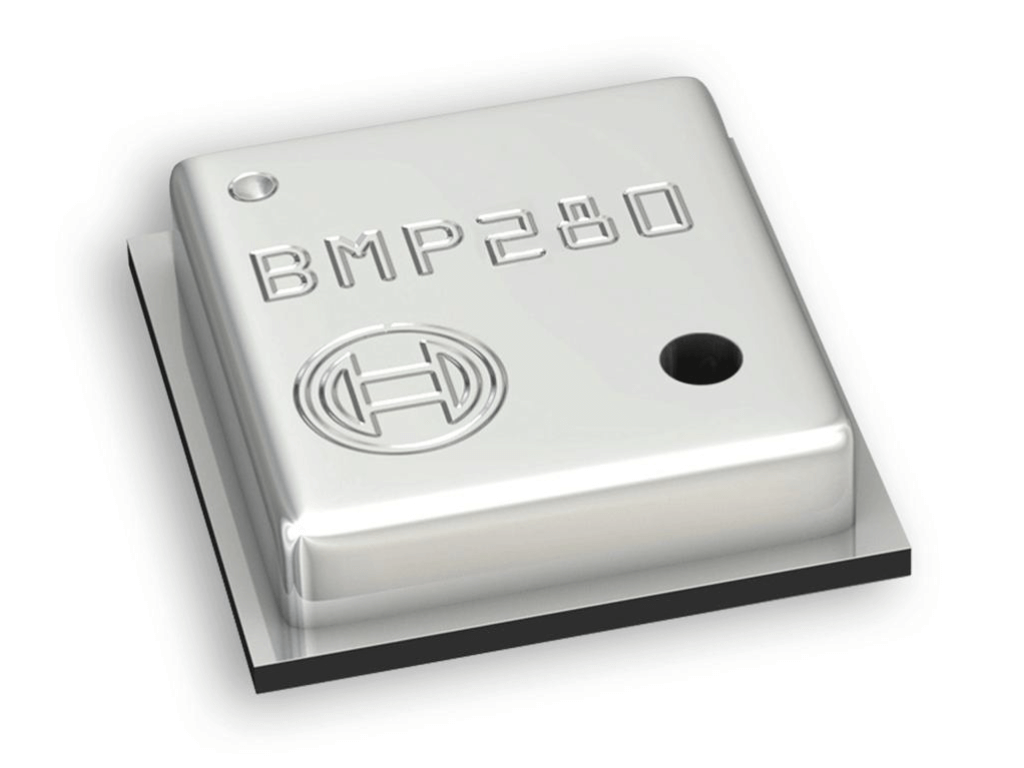
Барометр на BMP280
BMP280 – это датчик атмосферного давления от BOSCH Sensortec и является улучшенной версией датчика BMP180. Отличается от него меньшими размерами (2 x 2.5 x 0.95 мм), пониженным энергопотреблением, высокой точностью работы и наличием точной заводской калибровки и двумя последовательными интерфейсами: I2C и SPI.
Логика работы датчика BMP280 осталась такой же, но претерпела некоторые долгожданные улучшения.
В таблице приведены улучшения, которые претерпел датчик BMP280:
| Параметр | BMP180 | BMP280 |
|---|---|---|
| Размеры | 3.6 x 3.8 mm | 2.0 x 2.5 mm |
| Мин VDD | 1.80 V | 1.71 V |
| Мин VDDIO | 1.62 V | 1.20 V |
| Потребляемый ток @3 Pa RMS шум | 12 μA | 2.7 μA |
| RMS Шум | 3 Pa | 1.3 Pa |
| Разрешение давления | 1 Pa | 0.16 Pa |
| Разрешение температуры | 0.1°C | 0.01°C |
| Интерфейсы | I²C | I²C & SPI (3 и 4 линии связи, mode ‘00’ and ‘11’) |
| Режимы измерения | Только P или T, принудительное | P и T, принудительное или периодическое |
| Частота измерений | до 120 Гц | до 157 Гц |
| Параметры фильтра | Нет | Пять параметров фильтрации |
Режимами работы
От предыдущих моделей (BMP085 и BMP180) датчик отличается тремя режимами работы:
- SLEEP — режим пониженного энергопотребления
- FORCED – режим, аналогичный, режиму работы датчиков BMP085 и BMP180. По команде контроллера датчик выходит из режима сна, производит измерения, выдает результаты измерения контроллеру и переходит в режим пониженного энергопотребления
- NORMAL — уникальный для этого датчика режим. Датчик самостоятельно просыпается, производит измерения давления и температуры и засыпает. Все временные параметры этого режима программируются независимо. Считывать данные в этом режиме можно в любое время.
Фильтрация результатов измерений
В датчике предусмотрена фильтрация результатов измерений с настройкой таких параметров фильтрации:
- OVERSAMPLING для температуры (16, 17, 18, 19, 20 бит)
- OVERSAMPLING для давления (16, 17, 18, 19, 20 бит)
- TSB – время между между измерениями (0.5, 62.5, 125, 250, 500, 1000, 2000, 4000 мс)
- FILTER_COEFFICIENT – коэффициент фильтрации
Характеристики:
- Напряжение питания: от 1.71 В до 3.6 В
- Макс скорость I2C интерфейса: 3.4 МГц
- Потребляемый ток: 2.7 мкA при частоте отсчетов в 1 Гц
- Интерфейс: I2C, SPI (4 Провода), SPI (3 Провода)
- Калибровка: заводская
- Уровень шума: до 0.2 Па (1.7 см) и 0.01 температуры
- Диапазон измеряемого давления: от 300 hPa до 1100 hPa (9000 м до -500 м)
- Размер: 2.5 мм х 2.0 мм х 0.95 мм
BMP280 библиотека
BMP280RawData.h
#include <stdint.h>
class BMP280RawData {
private:
uint8_t pmsb;
uint8_t plsb;
uint8_t pxsb;
uint8_t tmsb;
uint8_t tlsb;
uint8_t txsb;
uint32_t temperature;
uint32_t pressure;
public:
BMP280RawData(
uint8_t pmsb, uint8_t plsb, uint8_t pxsb,
uint8_t tmsb, uint8_t tlsb, uint8_t txsb,
uint32_t temperature, uint32_t pressure) {
this->pmsb = pmsb;
this->plsb = plsb;
this->pxsb = pxsb;
this->tmsb = tmsb;
this->tlsb = tlsb;
this->txsb = txsb;
this->temperature = temperature;
this->pressure = pressure;
}
BMP280RawData() {
this->pmsb = 0;
this->plsb = 0;
this->pxsb = 0;
this->tmsb = 0;
this->tlsb = 0;
this->txsb = 0;
this->temperature = 0;
this->pressure = 0;
}
virtual ~BMP280RawData() {
}
void setPlsb(uint8_t plsb) {
this->plsb = plsb;
}
void setPmsb(uint8_t pmsb) {
this->pmsb = pmsb;
}
void setPressure(uint32_t pressure) {
this->pressure = pressure;
}
void setPxsb(uint8_t pxsb) {
this->pxsb = pxsb;
}
void setTemperature(uint32_t temperature) {
this->temperature = temperature;
}
void setTlsb(uint8_t tlsb) {
this->tlsb = tlsb;
}
void setTmsb(uint8_t tmsb) {
this->tmsb = tmsb;
}
void setTxsb(uint8_t txsb) {
this->txsb = txsb;
}
uint8_t getPlsb() {
return plsb;
}
uint8_t getPmsb() {
return pmsb;
}
uint32_t getPressure() {
return pressure;
}
uint8_t getPxsb() {
return pxsb;
}
uint32_t getTemperature() {
return temperature;
}
uint8_t getTlsb() {
return tlsb;
}
uint8_t getTmsb() {
return tmsb;
}
uint8_t getTxsb() {
return txsb;
}
};
BMP280CalibrationData.h
#include <stdint.h>
class BMP280CalibrationData {
private:
uint16_t T1;
int16_t T2;
int16_t T3;
uint16_t P1;
int16_t P2;
int16_t P3;
int16_t P4;
int16_t P5;
int16_t P6;
int16_t P7;
int16_t P8;
int16_t P9;
public:
BMP280CalibrationData() {
T1 = 0;
T2 = 0;
T3 = 0;
P1 = 0;
P2 = 0;
P3 = 0;
P4 = 0;
P5 = 0;
P6 = 0;
P7 = 0;
P8 = 0;
P9 = 0;
}
BMP280CalibrationData(
uint16_t T1, int16_t T2, int16_t T3,
uint16_t P1, int16_t P2, int16_t P3,
int16_t P4, int16_t P5, int16_t P6,
int16_t P7, int16_t P8, int16_t P9) {
this->P1 = P1;
this->P2 = P2;
this->P3 = P3;
this->P4 = P4;
this->P5 = P5;
this->P6 = P6;
this->P7 = P7;
this->P8 = P8;
this->P9 = P9;
this->T1 = T1;
this->T2 = T2;
this->T3 = T3;
}
virtual ~BMP280CalibrationData() {
}
void setP1(uint16_t P1) {
this->P1 = P1;
}
void setP2(int16_t P2) {
this->P2 = P2;
}
void setP3(int16_t P3) {
this->P3 = P3;
}
void setP4(int16_t P4) {
this->P4 = P4;
}
void setP5(int16_t P5) {
this->P5 = P5;
}
void setP6(int16_t P6) {
this->P6 = P6;
}
void setP7(int16_t P7) {
this->P7 = P7;
}
void setP8(int16_t P8) {
this->P8 = P8;
}
void setP9(int16_t P9) {
this->P9 = P9;
}
void setT1(uint16_t T1) {
this->T1 = T1;
}
void setT2(int16_t T2) {
this->T2 = T2;
}
void setT3(int16_t T3) {
this->T3 = T3;
}
uint16_t getP1() {
return P1;
}
int16_t getP2() {
return P2;
}
int16_t getP3() {
return P3;
}
int16_t getP4() {
return P4;
}
int16_t getP5() {
return P5;
}
int16_t getP6() {
return P6;
}
int16_t getP7() {
return P7;
}
int16_t getP8() {
return P8;
}
int16_t getP9() {
return P9;
}
uint16_t getT1() {
return T1;
}
int16_t getT2() {
return T2;
}
int16_t getT3() {
return T3;
}
};
BMP280Data.h
class BMP280Data {
private:
double pressure; // hPa
double temperature; // m
double altitude; // °C
public:
BMP280Data() {
pressure = 0;
temperature = 0;
altitude = 0;
}
BMP280Data(double pressure, double temperature, double altitude) {
this->pressure = pressure;
this->temperature = temperature;
this->altitude = altitude;
}
virtual ~BMP280Data() {
}
void setAltitude(double altitude) {
this->altitude = altitude;
}
void setPressure(double pressure) {
this->pressure = pressure;
}
void setTemperature(double temperature) {
this->temperature = temperature;
}
double getAltitude() {
return altitude;
}
double getPressure() {
return pressure;
}
double getTemperature() {
return temperature;
}
};
bmp280.h
#include <stdint.h>
#include "BMP280CalibrationData.h"
#include "BMP280RawData.h"
#include "BMP280Data.h"
#define MEAN_SEA_LEVEL_PRESSURE 1013
/**\name CHIP ID DEFINITION */
/***********************************************/
#define BMP280_CHIP_ID1 (0x56)
#define BMP280_CHIP_ID2 (0x57)
#define BMP280_CHIP_ID3 (0x58)
/************************************************/
/**\name I2C ADDRESS DEFINITION */
/***********************************************/
#define BMP280_I2C_ADDRESS1 (0x76)
#define BMP280_I2C_ADDRESS2 (0x77)
/************************************************/
/**\name POWER MODE DEFINITION */
/***********************************************/
/* Sensor Specific constants */
#define BMP280_SLEEP_MODE (0x00)
#define BMP280_FORCED_MODE (0x01)
#define BMP280_NORMAL_MODE (0x03)
#define BMP280_SOFT_RESET_CODE (0xB6)
/************************************************/
/**\name STANDBY TIME DEFINITION */
/***********************************************/
#define BMP280_STANDBY_TIME_1_MS (0x00)
#define BMP280_STANDBY_TIME_63_MS (0x01)
#define BMP280_STANDBY_TIME_125_MS (0x02)
#define BMP280_STANDBY_TIME_250_MS (0x03)
#define BMP280_STANDBY_TIME_500_MS (0x04)
#define BMP280_STANDBY_TIME_1000_MS (0x05)
#define BMP280_STANDBY_TIME_2000_MS (0x06)
#define BMP280_STANDBY_TIME_4000_MS (0x07)
/************************************************/
/**\name OVERSAMPLING DEFINITION */
/***********************************************/
#define BMP280_OVERSAMP_SKIPPED (0x00)
#define BMP280_OVERSAMP_1X (0x01)
#define BMP280_OVERSAMP_2X (0x02)
#define BMP280_OVERSAMP_4X (0x03)
#define BMP280_OVERSAMP_8X (0x04)
#define BMP280_OVERSAMP_16X (0x05)
/************************************************/
/**\name WORKING MODE DEFINITION */
/***********************************************/
#define BMP280_ULTRA_LOW_POWER_MODE (0x00)
#define BMP280_LOW_POWER_MODE (0x01)
#define BMP280_STANDARD_RESOLUTION_MODE (0x02)
#define BMP280_HIGH_RESOLUTION_MODE (0x03)
#define BMP280_ULTRA_HIGH_RESOLUTION_MODE (0x04)
#define BMP280_ULTRALOWPOWER_OVERSAMP_PRESSURE BMP280_OVERSAMP_1X
#define BMP280_ULTRALOWPOWER_OVERSAMP_TEMPERATURE BMP280_OVERSAMP_1X
#define BMP280_LOWPOWER_OVERSAMP_PRESSURE BMP280_OVERSAMP_2X
#define BMP280_LOWPOWER_OVERSAMP_TEMPERATURE BMP280_OVERSAMP_1X
#define BMP280_STANDARDRESOLUTION_OVERSAMP_PRESSURE BMP280_OVERSAMP_4X
#define BMP280_STANDARDRESOLUTION_OVERSAMP_TEMPERATURE BMP280_OVERSAMP_1X
#define BMP280_HIGHRESOLUTION_OVERSAMP_PRESSURE BMP280_OVERSAMP_8X
#define BMP280_HIGHRESOLUTION_OVERSAMP_TEMPERATURE BMP280_OVERSAMP_1X
#define BMP280_ULTRAHIGHRESOLUTION_OVERSAMP_PRESSURE BMP280_OVERSAMP_16X
#define BMP280_ULTRAHIGHRESOLUTION_OVERSAMP_TEMPERATURE BMP280_OVERSAMP_2X
/************************************************/
/**\name FILTER DEFINITION */
/***********************************************/
#define BMP280_FILTER_COEFF_OFF (0x00)
#define BMP280_FILTER_COEFF_2 (0x01)
#define BMP280_FILTER_COEFF_4 (0x02)
#define BMP280_FILTER_COEFF_8 (0x03)
#define BMP280_FILTER_COEFF_16 (0x04)
/************************************************/
/*
* REGISTERS
*/
enum {
BMP280_REGISTER_DIG_T1 = 0x88,
BMP280_REGISTER_DIG_T2 = 0x8A,
BMP280_REGISTER_DIG_T3 = 0x8C,
BMP280_REGISTER_DIG_P1 = 0x8E,
BMP280_REGISTER_DIG_P2 = 0x90,
BMP280_REGISTER_DIG_P3 = 0x92,
BMP280_REGISTER_DIG_P4 = 0x94,
BMP280_REGISTER_DIG_P5 = 0x96,
BMP280_REGISTER_DIG_P6 = 0x98,
BMP280_REGISTER_DIG_P7 = 0x9A,
BMP280_REGISTER_DIG_P8 = 0x9C,
BMP280_REGISTER_DIG_P9 = 0x9E,
BMP280_REGISTER_CHIPID = 0xD0,
BMP280_REGISTER_VERSION = 0xD1,
BMP280_REGISTER_SOFTRESET = 0xE0,
BMP280_REGISTER_CAL26 = 0xE1, // R calibration stored in 0xE1-0xF0
BMP280_REGISTER_STATUS = 0xF3,
BMP280_REGISTER_CONTROL = 0xF4,
BMP280_REGISTER_CONFIG = 0xF5,
BMP280_REGISTER_PRESSUREDATA_MSB = 0xF7,
BMP280_REGISTER_PRESSUREDATA_LSB = 0xF8,
BMP280_REGISTER_PRESSUREDATA_XLSB = 0xF9,
BMP280_REGISTER_TEMPDATA_MSB = 0xFA,
BMP280_REGISTER_TEMPDATA_LSB = 0xFB,
BMP280_REGISTER_TEMPDATA_XLSB = 0xFC
};
class BMP280 {
private:
char * device;
int devId;
int fd;
uint8_t chipId;
BMP280CalibrationData * bmp280CalibrationData;
BMP280RawData * bmp280RawData;
void write8(uint8_t, uint8_t);
uint8_t read8(uint8_t);
uint16_t read16(uint8_t);
int16_t readS16(uint8_t);
uint16_t readU16(uint8_t);
int32_t getTemperatureC(int32_t adc_T);
double getAltitude(double pressure);
double compensateT(int32_t t_fine);
double compensateP(int32_t adc_P, int32_t t_fine);
BMP280CalibrationData * getCalibrationData();
BMP280RawData * getRawData();
public:
BMP280(int);
BMP280(char *, int);
virtual ~BMP280();
BMP280CalibrationData * getBmp280CalibrationData();
BMP280Data * getBMP280Data();
int init();
void reset();
void spi3wEnable();
void spi3wDisable();
void setPowerMode(uint8_t);
void setTemperatureOversampling(uint8_t);
void setPressureOversampling(uint8_t);
void setStandbyTime(uint8_t);
void setIrrFilter(uint8_t);
uint8_t getPowerMode();
uint8_t getPressureOversampling();
uint8_t getTemperatureOversampling();
uint8_t getIrrFilter();
uint8_t getStandbyTime();
uint8_t getSpi3w();
uint8_t getMeasuringStatus();
uint8_t getImUpdateStatus();
uint8_t getConfig();
uint8_t getStatus();
uint8_t getControl();
uint8_t getChipId();
uint8_t getChipVersion();
void setReset(uint8_t);
void setConfig(uint8_t);
void setStatus(uint8_t);
void setControl(uint8_t);
void setDevice(char *);
};
bmp280.cpp
#include <string.h>
#include <stdint.h>
#include <stdexcept>
#include <iostream>
#include <stdio.h>
#include <math.h>
#include <wiringPiI2C.h>
#include <wiringPi.h>
#include "bmp280.h"
BMP280::BMP280(char * device, int devId) : fd(0), chipId(0), bmp280CalibrationData(0), bmp280RawData(0) {
setDevice(device);
this->devId = devId;
}
BMP280::BMP280(int devId) : device(0), fd(0), chipId(0), bmp280CalibrationData(0), bmp280RawData(0) {
this->devId = devId;
}
BMP280::~BMP280() {
delete bmp280CalibrationData;
delete bmp280RawData;
delete[] device;
}
int BMP280::init() {
int fd = -1;
if (device) {
fd = wiringPiI2CSetupInterface(device, devId);
} else {
int rev = piBoardRev();
if (rev == 1) {
setDevice("/dev/i2c-0");
} else if (rev == 2) {
setDevice("/dev/i2c-1");
} else if (rev == 3) {
setDevice("/dev/i2c-2");
} else {
setDevice("/dev/i2c-3");
}
fd = wiringPiI2CSetupInterface(device, devId);
}
if (fd < 0) {
char buffer[256];
sprintf(buffer, "Device not found: I2C device: %s, device ID: %d", device, devId);
throw std::logic_error(buffer);
}
this->fd = fd;
uint8_t chipId = getChipId();
switch (chipId) {
case BMP280_CHIP_ID1:
case BMP280_CHIP_ID2:
case BMP280_CHIP_ID3:
this->chipId = chipId;
break;
default:
{
char buffer[256];
sprintf(buffer, "Device Chip ID error: chip ID = %d", chipId);
throw std::logic_error(buffer);
}
}
if (bmp280CalibrationData) {
delete bmp280CalibrationData;
}
bmp280CalibrationData = getCalibrationData();
return fd;
}
BMP280CalibrationData * BMP280::getCalibrationData() {
uint16_t T1, P1;
int16_t T2, T3, P2, P3, P4, P5, P6, P7, P8, P9;
T1 = readU16(BMP280_REGISTER_DIG_T1);
T2 = readS16(BMP280_REGISTER_DIG_T2);
T3 = readS16(BMP280_REGISTER_DIG_T3);
P1 = readU16(BMP280_REGISTER_DIG_P1);
P2 = readS16(BMP280_REGISTER_DIG_P2);
P3 = readS16(BMP280_REGISTER_DIG_P3);
P4 = readS16(BMP280_REGISTER_DIG_P4);
P5 = readS16(BMP280_REGISTER_DIG_P5);
P6 = readS16(BMP280_REGISTER_DIG_P6);
P7 = readS16(BMP280_REGISTER_DIG_P7);
P8 = readS16(BMP280_REGISTER_DIG_P8);
P9 = readS16(BMP280_REGISTER_DIG_P9);
return new BMP280CalibrationData(T1, T2, T3, P1, P2, P3, P4, P5, P6, P7, P8, P9);
}
BMP280CalibrationData * BMP280::getBmp280CalibrationData() {
return bmp280CalibrationData;
}
BMP280RawData * BMP280::getRawData() {
uint8_t pmsb, plsb, pxsb;
uint8_t tmsb, tlsb, txsb;
uint32_t temperature, pressure;
plsb = read8(BMP280_REGISTER_PRESSUREDATA_LSB);
pmsb = read8(BMP280_REGISTER_PRESSUREDATA_MSB);
pxsb = read8(BMP280_REGISTER_PRESSUREDATA_XLSB);
tmsb = read8(BMP280_REGISTER_TEMPDATA_MSB);
tlsb = read8(BMP280_REGISTER_TEMPDATA_LSB);
txsb = read8(BMP280_REGISTER_TEMPDATA_XLSB);
temperature = 0;
temperature = (temperature | tmsb) << 8;
temperature = (temperature | tlsb) << 8;
temperature = (temperature | txsb) >> 4;
pressure = 0;
pressure = (pressure | pmsb) << 8;
pressure = (pressure | plsb) << 8;
pressure = (pressure | pxsb) >> 4;
return new BMP280RawData(pmsb, plsb, pxsb, tmsb, tlsb, txsb, temperature, pressure);
}
void BMP280::reset() {
setReset(BMP280_SOFT_RESET_CODE);
}
void BMP280::spi3wEnable() {
uint8_t config = getConfig();
setConfig(config | 0b00000001);
}
void BMP280::spi3wDisable() {
uint8_t config = getConfig();
setConfig(config & 0b11111110);
}
void BMP280::setPowerMode(uint8_t mode) {
switch (mode) {
case BMP280_FORCED_MODE:
case BMP280_NORMAL_MODE:
case BMP280_SLEEP_MODE:
{
uint8_t curentMode = getControl() & 0b11111100;
setControl(curentMode | mode);
break;
}
default:break;
}
}
void BMP280::setTemperatureOversampling(uint8_t oversampling) {
switch (oversampling) {
case BMP280_OVERSAMP_SKIPPED:
case BMP280_OVERSAMP_1X:
case BMP280_OVERSAMP_2X:
case BMP280_OVERSAMP_4X:
case BMP280_OVERSAMP_8X:
case BMP280_OVERSAMP_16X:
{
uint8_t curentOversampling = getControl() & 0b00011111;
setControl(curentOversampling | (oversampling << 5));
break;
}
default:break;
}
}
void BMP280::setPressureOversampling(uint8_t oversampling) {
switch (oversampling) {
case BMP280_OVERSAMP_SKIPPED:
case BMP280_OVERSAMP_1X:
case BMP280_OVERSAMP_2X:
case BMP280_OVERSAMP_4X:
case BMP280_OVERSAMP_8X:
case BMP280_OVERSAMP_16X:
{
uint8_t curentOversampling = getControl() & 0b11100011;
setControl(curentOversampling | (oversampling << 2));
break;
}
default:break;
}
}
void BMP280::setStandbyTime(uint8_t tStandby) {
switch (tStandby) {
case BMP280_STANDBY_TIME_1_MS:
case BMP280_STANDBY_TIME_63_MS:
case BMP280_STANDBY_TIME_125_MS:
case BMP280_STANDBY_TIME_250_MS:
case BMP280_STANDBY_TIME_500_MS:
case BMP280_STANDBY_TIME_1000_MS:
case BMP280_STANDBY_TIME_2000_MS:
case BMP280_STANDBY_TIME_4000_MS:
{
uint8_t config = getConfig() & 0b00011111;
setConfig(config | (tStandby << 5));
break;
}
default:break;
}
}
void BMP280::setIrrFilter(uint8_t irrFilter) {
switch (irrFilter) {
case BMP280_FILTER_COEFF_OFF:
case BMP280_FILTER_COEFF_2:
case BMP280_FILTER_COEFF_4:
case BMP280_FILTER_COEFF_8:
case BMP280_FILTER_COEFF_16:
{
uint8_t config = getConfig() & 0b11100011;
setConfig(config | (irrFilter << 2));
break;
}
default:break;
}
}
uint8_t BMP280::getPowerMode() {
return getControl() & 0b00000011;
}
uint8_t BMP280::getPressureOversampling() {
return (getControl() & 0b00011100) >> 2;
}
uint8_t BMP280::getTemperatureOversampling() {
return (getControl() & 0b11100000) >> 5;
}
uint8_t BMP280::getIrrFilter() {
return (getConfig() & 0b00011100) >> 2;
}
uint8_t BMP280::getStandbyTime() {
return (getConfig() & 0b11100000) >> 5;
}
uint8_t BMP280::getSpi3w() {
return (getConfig() & 0b00000001);
}
uint8_t BMP280::getMeasuringStatus() {
return (getStatus() >> 3) & 0b00000001;
}
uint8_t BMP280::getImUpdateStatus() {
return getStatus() & 0b00000001;
}
uint8_t BMP280::getConfig() {
return read8(BMP280_REGISTER_CONFIG);
}
uint8_t BMP280::getStatus() {
return read8(BMP280_REGISTER_STATUS);
}
uint8_t BMP280::getControl() {
return read8(BMP280_REGISTER_CONTROL);
}
uint8_t BMP280::getChipId() {
return read8(BMP280_REGISTER_CHIPID);
}
uint8_t BMP280::getChipVersion() {
return read8(BMP280_REGISTER_VERSION);
}
void BMP280::setReset(uint8_t value) {
write8(BMP280_REGISTER_SOFTRESET, value);
}
void BMP280::setConfig(uint8_t value) {
return write8(BMP280_REGISTER_CONFIG, value);
}
void BMP280::setStatus(uint8_t value) {
return write8(BMP280_REGISTER_STATUS, value);
}
void BMP280::setControl(uint8_t value) {
return write8(BMP280_REGISTER_CONTROL, value);
}
double BMP280::getAltitude(double pressure) {
return 44330.0 * (1.0 - pow(pressure / MEAN_SEA_LEVEL_PRESSURE, 0.190294957));
}
int32_t BMP280::getTemperatureC(int32_t adc_T) {
int32_t var1 = ((((adc_T >> 3) - ((int32_t) bmp280CalibrationData->getT1() << 1))) *
((int32_t) bmp280CalibrationData->getT2())) >> 11;
int32_t var2 = (((((adc_T >> 4) - ((int32_t) bmp280CalibrationData->getT1())) *
((adc_T >> 4) - ((int32_t) bmp280CalibrationData->getT1()))) >> 12) *
((int32_t) bmp280CalibrationData->getT3())) >> 14;
return var1 + var2;
}
double BMP280::compensateT(int32_t t_fine) {
double T = (t_fine * 5 + 128) >> 8;
return T / 100;
}
double BMP280::compensateP(int32_t adc_P, int32_t t_fine) {
int64_t var1, var2, p;
var1 = ((int64_t) t_fine) - 128000;
var2 = var1 * var1 * (int64_t) bmp280CalibrationData->getP6();
var2 = var2 + ((var1 * (int64_t) bmp280CalibrationData->getP5()) << 17);
var2 = var2 + (((int64_t) bmp280CalibrationData->getP4()) << 35);
var1 = ((var1 * var1 * (int64_t) bmp280CalibrationData->getP3()) >> 8) +
((var1 * (int64_t) bmp280CalibrationData->getP2()) << 12);
var1 = (((((int64_t) 1) << 47) + var1))*((int64_t) bmp280CalibrationData->getP1()) >> 33;
if (var1 == 0) {
return 0; // avoid exception caused by division by zero
}
p = 1048576 - adc_P;
p = (((p << 31) - var2)*3125) / var1;
var1 = (((int64_t) bmp280CalibrationData->getP9()) * (p >> 13) * (p >> 13)) >> 25;
var2 = (((int64_t) bmp280CalibrationData->getP8()) * p) >> 19;
p = ((p + var1 + var2) >> 8) + (((int64_t) bmp280CalibrationData->getP7()) << 4);
return (double) p / 256;
}
BMP280Data * BMP280::getBMP280Data() {
int32_t t_fine;
double t, p, a;
while (getMeasuringStatus()) {
}
if (bmp280RawData) {
delete bmp280RawData;
}
bmp280RawData = getRawData();
t_fine = getTemperatureC(bmp280RawData->getTemperature());
t = compensateT(t_fine); // C
p = compensateP(bmp280RawData->getPressure(), t_fine) / 100; // hPa
a = getAltitude(p); // meters
return new BMP280Data(p, t, a);
}
void BMP280::setDevice(char * device) {
if (device) {
this->device = new char[strlen(device)];
strcpy(this->device, device);
}
}
void BMP280::write8(uint8_t reg, uint8_t value) {
wiringPiI2CWriteReg8(fd, reg, value);
}
uint8_t BMP280::read8(uint8_t reg) {
return wiringPiI2CReadReg8(fd, reg);
}
uint16_t BMP280::read16(uint8_t reg) {
return wiringPiI2CReadReg16(fd, reg);
}
int16_t BMP280::readS16(uint8_t reg) {
return (int16_t) read16(reg);
}
uint16_t BMP280::readU16(uint8_t reg) {
return (uint16_t) read16(reg);
}
Схема подключения BMP280 к Orange Pi
 Я с этими датчиками работаю только по I2C. Подключяется BMP280 к Orange Pi очень просто: на Vcc даём 3.3 В, GND, SCL и SDA.
Я с этими датчиками работаю только по I2C. Подключяется BMP280 к Orange Pi очень просто: на Vcc даём 3.3 В, GND, SCL и SDA.
Рабочее напряжение датчика от 1.71 В до 3.6 В. Не стоит питать от 5 В, так как вероятность того, что он выйдет из строя, очень высока.
Ниже приведён пример программы для проверки вышеуказанной библиотеки.
Данная программа создаёт новый объект для работы с датчиком:
BMP280 * bmp280 = new BMP280(device, devId);
соединяется с датчиком:
int fd = bmp280->init();
и сбрасывает все его настройки:
bmp280->reset();
после чего задаёт новые настройки (режим работы, фильтры и др.):
bmp280->setPowerMode(BMP280_NORMAL_MODE); bmp280->setTemperatureOversampling(BMP280_ULTRAHIGHRESOLUTION_OVERSAMP_TEMPERATURE); bmp280->setPressureOversampling(BMP280_ULTRAHIGHRESOLUTION_OVERSAMP_PRESSURE); bmp280->setIrrFilter(BMP280_FILTER_COEFF_16); bmp280->setStandbyTime(BMP280_STANDBY_TIME_250_MS);
и раз в секунду читает и выводит на экран данные с BMP280:
while (1) {
delay(1000);
BMP280Data * bmp280Data = bmp280->getBMP280Data();
printf("pressure : %.2f hPa\n", bmp280Data->getPressure());
printf("temperature: %.2f °C\n", bmp280Data->getTemperature());
printf("altitude : %.2f m\n\n", bmp280Data->getAltitude());
delete bmp280Data;
}
main.cpp
#include <stdio.h>
#include <iostream>
#include <stdexcept>
#include <wiringPi.h>
#include "bmp280.h"
int main(int argc, char **argv) {
// char * device = "/dev/i2c-0";
// char * device = "/dev/i2c-1";
char * device = "/dev/i2c-2";
// char * device = "/dev/i2c-3";
int devId = BMP280_I2C_ADDRESS1;
try {
BMP280 * bmp280 = new BMP280(device, devId);
int fd = bmp280->init();
if (fd < 0) {
printf("Device not found");
return -1;
}
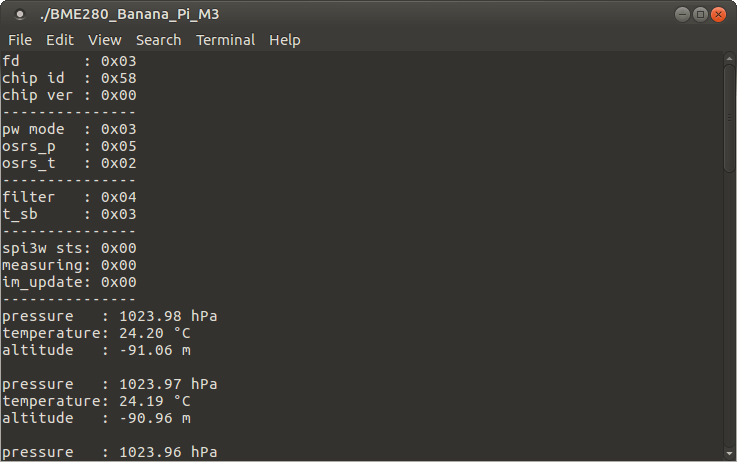
printf("fd : 0x%02x\n", fd);
printf("chip id : 0x%02x\n", bmp280->getChipId());
printf("chip ver : 0x%02x\n", bmp280->getChipVersion());
bmp280->reset();
bmp280->setPowerMode(BMP280_NORMAL_MODE);
bmp280->setTemperatureOversampling(BMP280_ULTRAHIGHRESOLUTION_OVERSAMP_TEMPERATURE);
bmp280->setPressureOversampling(BMP280_ULTRAHIGHRESOLUTION_OVERSAMP_PRESSURE);
bmp280->setIrrFilter(BMP280_FILTER_COEFF_16);
bmp280->setStandbyTime(BMP280_STANDBY_TIME_250_MS);
printf("---------------\n");
printf("pw mode : 0x%02x\n", bmp280->getPowerMode());
printf("osrs_p : 0x%02x\n", bmp280->getPressureOversampling());
printf("osrs_t : 0x%02x\n", bmp280->getTemperatureOversampling());
printf("---------------\n");
printf("filter : 0x%02x\n", bmp280->getIrrFilter());
printf("t_sb : 0x%02x\n", bmp280->getStandbyTime());
printf("---------------\n");
printf("spi3w sts: 0x%02x\n", bmp280->getSpi3w());
printf("measuring: 0x%02x\n", bmp280->getMeasuringStatus());
printf("im_update: 0x%02x\n", bmp280->getImUpdateStatus());
printf("---------------\n");
while (1) {
delay(1000);
BMP280Data * bmp280Data = bmp280->getBMP280Data();
printf("pressure : %.2f hPa\n", bmp280Data->getPressure());
printf("temperature: %.2f °C\n", bmp280Data->getTemperature());
printf("altitude : %.2f m\n\n", bmp280Data->getAltitude());
delete bmp280Data;
}
delete bmp280;
} catch (std::exception & e) {
printf("%s\n", e.what());
}
return 0;
}
Результат
Скачать проект CodeLite
Для программирования на С/С++ я использую CodeLite IDE, так как с Code::Blocks у меня были проблемы.
Проект: BMP280_Banana_Pi_M3.zip
Flyer: BST-BMP280-FL000-00 (Bosch_Sensortec_Flyer_BMP280_onl.pdf)
Datasheet: BST-BMP280-DS001-12 (BST-BMP280-DS001-12.pdf)
Driver: BMP280 driver










Добрый день! Есть вопрос по данному поводу, подскажите пожалуйста, сколько датчиков BMP280 можно подключать к одному gpio?
Добрый день! А есть инструкция как подключить по командам? Как здесь, например https://www.rlocman.ru/review/article.html?di=337909 я просто новичек в этом деле и не сосем понимаю, что к чему.
Wonderful Post. Good you explained everything in details. https://www.vivaindia.com/
Wonderful & very informative article. https://www.vivaindia.com.co/
Great Sharing, Thank you for such detailed description. Excellent Explanation. Thanks for sharing such a informative and useful post. https://www.vivaindia.com.mx/
iphone 15 pro how much is iphone
Доска объявлений https://estul.ru/blog по всей России: продавай и покупай товары, заказывай и предлагай услуги. Быстрое размещение, удобный поиск, реальные предложения. Каждый после регистрации получает на баланс аккаунта 100? для возможности бесплатного размещения ваших объявлений
buy thc gummies in prague cannafood in prague
Витебский университет П.М.Машерова https://vsu.by образовательный центр. Вуз является ведущим образовательным, научным и культурным центром Витебской области.
аренда машин адлер посуточно arenda-mashiny-adler.ru
снять автомобиль в аренду в сочи посуточная аренда автомобиля в сочи
аэропорт храброво аренда автомобиля прокат авто храброво аэропорт
заказ авто аренда напрокат авто посуточно
The best online slots rise of olympus slot in one place: classics, new releases, jackpots and themed machines. Play without registration, test the demo or make real bets with bonuses.
book comic read free digital comics reader
лучшие фильмы 2025 онлайн фантастика 2025 смотреть бесплатно
маркетплейс аккаунтов соцсетей magazin-akkauntov-online.ru
фильмы комедии 2025 ужасы 2025 смотреть онлайн HD
хороший фильм без рекламы фильмы 2025 без регистрации и рекламы
магазин аккаунтов социальных сетей маркетплейс аккаунтов
маркетплейс аккаунтов соцсетей купить аккаунт
маркетплейс аккаунтов соцсетей аккаунт для рекламы
производство металлических значков металлические значки под заказ
площадка для продажи аккаунтов аккаунты с балансом
маркетплейс аккаунтов магазин аккаунтов
маркетплейс аккаунтов соцсетей услуги по продаже аккаунтов
биржа аккаунтов купить аккаунт
покупка аккаунтов купить аккаунт с прокачкой
печать плаката а4 печать плакатов поштучно
Account Buying Platform Account Selling Service
Account Purchase Account trading platform
Accounts marketplace accountsmarketplacehub.com
Website for Selling Accounts Account Trading
Accounts marketplace https://buyaccounts001.com
account acquisition account market
account trading buy pre-made account
database of accounts for sale accounts for sale
account exchange service accounts for sale
accounts for sale verified accounts for sale
sell accounts purchase ready-made accounts
verified accounts for sale account trading
online account store marketplace for ready-made accounts
account marketplace account purchase
database of accounts for sale account acquisition
online account store account exchange service
social media account marketplace account trading
accounts market account buying service
курсовые на заказ https://kursoviehelp.ru
website for selling accounts account catalog
account trading accounts for sale
account buying service https://marketplace-social-accounts.org
account exchange accounts market
account exchange buy pre-made account
купить курсовую сайты для написания курсовой
sell account social media account marketplace
Нужен номер для ТГ? Предлагаем https://techalpaka.online для одноразовой или постоянной активации. Регистрация аккаунта без SIM-карты, в любом регионе. Удобно, надёжно, без привязки к оператору.
social media account marketplace https://accounts-offer.org
purchase ready-made accounts https://accounts-marketplace.xyz/
find accounts for sale https://buy-best-accounts.org
guaranteed accounts https://accounts-marketplace.live/
buy account https://social-accounts-marketplace.xyz/
купить смартфон xiaomi каталог смартфонов с ценами
account selling platform https://buy-accounts.space/
купить смартфон samsung каталог смартфонов с ценами
account marketplace https://buy-accounts.live
купить смартфон 14 цена смартфона xiaomi
account purchase account marketplace
продать аккаунт https://akkaunty-na-prodazhu.pro/
продать аккаунт rynok-akkauntov.top
биржа аккаунтов https://akkaunt-magazin.online/
купить аккаунт https://akkaunty-market.live
ГГУ имени Ф.Скорины https://www.gsu.by/ крупный учебный и научно-исследовательский центр Республики Беларусь. Высшее образование в сфере гуманитарных и естественных наук на 12 факультетах по 35 специальностям первой ступени образования и 22 специальностям второй, 69 специализациям.
магазин аккаунтов akkaunty-optom.live
продать аккаунт купить аккаунт
Портал о недвижимости https://akadem-ekb.ru всё, что нужно знать о продаже, покупке и аренде жилья. Актуальные объявления, обзоры новостроек, советы экспертов, юридическая информация, ипотека, инвестиции. Помогаем выбрать квартиру или дом в любом городе.
купить аккаунт kupit-akkaunt.online
facebook ad account buy buy facebook ad accounts
buy old facebook account for ads buying facebook ad account
buy a facebook account https://buy-ads-account.click/
buy facebook accounts cheap https://ad-account-buy.top
buy fb ad account buy fb ad account
facebook ad account buy https://ad-accounts-for-sale.work
buy google ads threshold account https://buy-ads-accounts.click
сколько стоит реферат сколько стоит реферат на заказ
buy fb account https://buy-accounts.click
buy google ads threshold accounts https://ads-account-buy.work/
buy verified google ads account https://buy-ads-invoice-account.top
buy google ads account buy google adwords accounts
buy fb bm https://buy-business-manager.org
verified bm buy-verified-business-manager-account.org
facebook business manager account buy https://buy-verified-business-manager.org/
buy facebook business account https://business-manager-for-sale.org
buy facebook business account buy verified facebook business manager account
facebook business manager buy buy-bm.org
buy verified business manager buy-business-manager-accounts.org
buy tiktok ad account https://tiktok-ads-account-for-sale.org
tiktok ad accounts https://tiktok-agency-account-for-sale.org
tiktok agency account for sale https://buy-tiktok-ad-account.org
создание сайта на laravel сайт на laravel
tiktok ads account for sale https://buy-tiktok-ads.org
сео продвижение seo москва цена
латунные шильды латунный шильдик на заказ
бейджи заказать москва металлические бейджи с эмалью изготовление
типография санкт петербург типография печать
типография напечатать типография полиграфия
типография быстро типография спб
печать черных визиток печать визиток на пластике
Изготовление и печать наклеек дешево. Стикеры для бизнеса, сувениров, интерьера и упаковки. Печатаем тиражами от 1 штуки, любые материалы и формы. Качественно, недорого, с доставкой по СПб.
Безболезненная салон лазерной эпиляции Удаление волос на любом участке тела. Работаем с чувствительной кожей, используем новейшие лазеры. Акции, абонементы, индивидуальный подход.
Профессиональная https://lazernaya-epilyaciya11.ru. Эффективное удаление волос на любом участке тела, подход к любому фототипу. Сертифицированные специалисты, стерильность, скидки. Запишитесь прямо сейчас!
Избавьтесь от волос студия лазерной эпиляции спб навсегда — с помощью лазерной эпиляции. Эффективные процедуры на любом участке тела, минимальный дискомфорт, заметный результат уже после первого сеанса.
доставка цветов белые доставка цветов на дом
Свежие актуальные Самые свежие новости из мира спорта со всего мира. Результаты матчей, интервью, аналитика, расписание игр и обзоры соревнований. Будьте в курсе главных событий каждый день!
customized balloons dubai dubai city balloons
chief engineer cv example engineer resumes
Разнообразие от елегантни рокли за офиса и делови срещи
стилни дамски рокли http://www.rokli-damski.com/ .
Подари си комфорт с дамски комплект за уикенд разходки и почивка
дамски комплекти с намаление http://komplekti-za-jheni.com/ .
Създай безупречна визия с нашите дамски тениски и модерни аксесоари
модерни дамски тениски https://www.teniski-damski.com .
Вдъхнови се от новите модни решения при дамските блузи
стилни дамски блузи bluzi-damski.com .
Услуги клининга с подпиской для управляющих компаний
сайт клининговой компании kliningovaya-kompaniya0.ru .
Мир полон тайн https://phenoma.ru читайте статьи о малоизученных феноменах, которые ставят науку в тупик. Аномальные явления, редкие болезни, загадки космоса и сознания. Доступно, интересно, с научным подходом.
Читайте о необычном http://phenoma.ru научно-популярные статьи о феноменах, которые до сих пор не имеют однозначных объяснений. Психология, физика, биология, космос — самые интересные загадки в одном разделе.
Магазин шин с поддержкой подбора по VIN и консультацией экспертов
магазин шины kupit-shiny0-spb.ru .
Сувениры с логотипом на заказ — быстро, выгодно, надёжно
сувенирная продукция https://suvenirnaya-produktsiya-s-logotipom-1.ru .
resume civil engineer fresh graduate https://resumes-engineers.com
resume google engineer resume google engineer
resume google engineer resume engineering fresher
Аренда яхты — идеальный способ отметить день рождения на воде
арендовать яхту в сочи http://arenda-yahty-sochi23.ru/ .
Jarvi — корм премиум-класса, одобренный ветеринарами
jarvi корм производитель jarvi корм производитель .
Гагры ждут гостей — отдых у моря, который приятно вспоминать
гагра снять жилье otdyh-gagry.ru .
Film tutkunlarına özel güncel ve kaliteli full hd film arşivi
4k film ize 4k film ize .
Поверка, калибровка и метрологическая аттестация — в чём разница
Поверка средств измерений в Москве https://www.poverka-si-msk.ru/ .
Need transportation? ship car across country car transportation company services — from one car to large lots. Delivery to new owners, between cities. Safety, accuracy, licenses and experience over 10 years.
Медицинская помощь без лишнего стресса — нарколог приезжает к вам домой
вызов врача нарколога на дом телефон https://clinic-narkolog24.ru/ .
Доставка алкоголя с акциями и скидками — удобно и выгодно
как купить алкоголь с доставкой на дом в москве ночью алкоголь дешево москва доставка .
Бокалы для вина в скандинавском стиле — лёгкость и простота
винный бокал http://www.bokaly-dlya-vina.neocities.org .
Доступный императорский фарфор — премиум-посуда по разумным ценам
ломоносовский фарфоровый завод https://imperatorskiy-farfor.kesug.com .
Уборка квартир перед продажей: создаём первое впечатление
сайт клининговой компании kliningovaya-kompaniya10.ru .
Спецпредложения на лизинг коммерческого транспорта с отсрочкой первого платежа
купить оборудование в лизинг http://www.lizing-auto-top1.ru/oborudovanie/ .
Печать на футболках для блогеров, стримеров и контент-креаторов
сделать принт на футболке сделать принт на футболке .
Архитектурные решения для деревянных домов под ключ в современном стиле
строительство деревянных домов москва https://www.derevyannye-doma-pod-klyuch-msk0.ru/ .
кейс защитный fs купить plastcase
написание реферата сделать реферат на заказ
Устойчивость и безопасность: подстолья с усиленными опорами
подстолье под столешницу http://www.podstolia-msk.ru/ .
помощь с дипломом диплом срочно заказать
написать контрольную на заказ контрольная работа по физике на заказ
Услуги клининга с круглосуточным обслуживанием и быстрым выездом
клининг москва уборка https://www.kliningovaya-kompaniya10.ru .
Коммерческие автомобили в лизинг — выгодный старт для малого бизнеса
взять в лизинг грузовой автомобиль http://lizing-auto-top1.ru/gruzovye-avtomobili/ .
Дизайнерские интерьеры в каркасных домах: идеи и фото
каркасный дом санкт петербург https://www.spb-karkasnye-doma-pod-kluch.ru/ .
Каркасный дом с мансардой и террасой — уют и функциональность
дома каркасные https://karkasnie-doma-pod-kluch06.ru .
пансионат для пожилых забота пансионат для пожилых и инвалидов
Комфорт загородной жизни: деревянные дома под ключ от опытной строительной компании
строительство домов из дерева под ключ http://www.derevyannye-doma-pod-klyuch-msk0.ru .
спросить юриста онлайн задать вопрос юристу по телефону бесплатно
печать спб типография печать спб типография
металлический значок пин металлический значок пин
изготовление металлических значков изготовление металлических значков
Не только суши, но и традиционные корейские блюда — доставка корейской еды для тех, кто ценит вкус Азии.
В последние годы вок-заказ становится всё более востребованным методом доставки еды. Это связано с удобством и разнообразием предлагаемых блюд.
На рынке имеется огромное количество заведений, которые рады предложить вок-блюда. Каждый ресторан имеет свои особенности и уникальные блюда в меню.
Чтобы сделать правильный выбор, стоит обратить внимание на отзывы. Это поможет избежать разочарований и выбрать качественное заведение.
Следите за специальными предложениями, которые могут сделать ваш заказ более выгодным. Это отличная возможность попробовать новые блюда по более низкой цене.
Сочные роллы с лососем, тунцом и авокадо — доставка роллов прямо к вашему столу. Без переплат и с любовью к деталям.
Процесс заказа суши не вызывает трудностей. Существует несколько способов заказа суши, включая сайт ресторана и мобильные приложения. Каждый из них имеет свои особенности, которые важно учесть.
Важно учитывать мнения других клиентов при выборе суши-ресторана. Отзывы могут подсказать, стоит ли заказывать именно там. Так вы сможете избежать возможных неприятных сюрпризов и выбрать заведение с хорошей репутацией.
Проверьте меню заведения, прежде чем сделать заказ. Некоторые рестораны могут радовать вас необычными рецептами и комбинациями. Выбирайте те блюда, которые вам нравятся, и не стесняйтесь пробовать что-то новое.
После оформления заказа не забудьте узнать время доставки. Это поможет вам организовать свой вечер и быть готовым к приезду курьера. Не забудьте проверить, доставляют ли в вашу часть города.
Como empresa de espectáculos de drones, ofrecemos una solución creativa y ecológica para eventos de alto impacto. Nuestra flota aérea se sincroniza para ofrecer shows mágicos y completamente seguros.
El espectáculo de drones ha ganado popularidad en los últimos años. Estos shows integran tecnología avanzada, creatividad y diversión. Las presentaciones de drones se han convertido en una atracción habitual en festivales y acontecimientos.
Los drones que llevan luces crean diseños asombrosos en el cielo oscuro. Los espectadores quedan maravillados con el espectáculo de luces y movimientos.
Muchos organizadores optan por contratar compañías especializadas para estos eventos. Estas empresas cuentan con pilotos capacitados y equipos de última generación.
La seguridad representa un factor fundamental en la realización de estos eventos. Se siguen procedimientos detallados para prevenir riesgos durante estas exhibiciones. El futuro de estos eventos es brillante, con innovaciones tecnologías en continuo desarrollo.
New AI generator nsfw ai image generator of the new generation: artificial intelligence turns text into stylish and realistic image and videos.
HD film zile kategorimizde, en popüler filmler yüksek kalitede sunulmaktadır. Film keyfi için hd film zile sayfasına göz atabilirsiniz.
Yayın hizmetleri son birkaç yılda büyük bir popülerlik artışı yaşadı. En büyük trendlerden biri, özellikle Full HD ve 4K formatlarında yüksek kaliteli içeriğe olan talebin artmasıdır. İnsanlar, netlik ve detaylara vurgu yapan etkileyici izleme deneyimleri arayışında.
Full HD filmler 1920×1080 piksel çözünürlük sunarak etkileyici görsel kalite sağlar. Daha büyük ekranlarda bu çözünürlük ön plana çıkar, izleyicilerin her detayı takdir etmesini sağlar. Ancak, 4K filmler bu deneyimi daha da ileriye taşıyarak 3840×2160 piksel gibi çok daha yüksek bir çözünürlük sunar.
Tüketici tercihlerine yanıt olarak, yayın platformları artık geniş bir Full HD ve 4K film arşivi sunuyor. Böylece, seyirciler hem yeni yapımları hem de sevilen klasik filmleri en yüksek görsel kalitede izleyebiliyor. Ayrıca, birçok hizmet bu yüksek çözünürlük formatlarını sergileyen orijinal içeriklere yatırım yapıyor.
Sonuç olarak, yayın platformlarındaki Full HD ve 4K film trendi izleyici tercihindeki değişimi yansıtıyor. Teknoloji ilerledikçe, görsel medyayı tüketme şeklimizde daha fazla gelişme bekleyebiliriz. Bu gelişmeler kesinlikle sinema ve ev eğlencesinin geleceğini etkileyecektir.
Сэкономьте до полугода на проектировании! Выбирайте оптимальный готовый проект дома из нашей коллекции и приступайте к возведению стен уже в этом сезоне.
Проекты домов становятся все более популярными среди людей, ищущих идеальное жилье. Выбор подходящего проекта очень важен для создания комфортного дома.
Разнообразие проектов домов включает в себя различные стили и типы. Каждый желающий может выбрать проект, отвечающий его личным предпочтениям.
Учитывать размеры земельного участка — это первостепенная задача при выборе проекта. Важно также оценить окружающую среду и климатические условия.
Современные технологии позволяют создавать уникальные проекты домов. Каждый проект можно настроить в соответствии с требованиями клиента.
Прозрачное ценообразование – ключевой принцип нашего сервиса. Узнайте реальные цены на отдых в Джубге и подберите жилье, идеально соответствующее вашему бюджету. Планируйте экономно джубга отдых цены.
Джубга — это прекрасное место для отдыха на Черном море. Курорт Джубга известен своими живописными пляжами и прекрасными видами.
Множество туристов приезжает сюда каждый год, чтобы насладиться местными достопримечательностями. К числу популярных мест относятся водопады и древние дольмены.
Кроме того, Джубга предлагает разнообразные развлечения для всей семьи. Развлечения варьируются от спокойных прогулок до активных водных видов спорта, подходящих для всех.
Пляжный отдых является обязательной частью вашего путешествия в Джубгу. На пляжах Джубги можно наслаждаться солнцем, морем и вкусной местной кухней в кафе.
Гарантируйте себе спокойный отдых в окружении гор и моря. Найдите идеальное жилье в Абхазии для вашего абхазия отдых.
Отдых в Абхазии — это настоящая находка для тех, кто ценит природу и атмосферу. В этой стране моря, гор и сочных зелёных долин возможно найти всё для идеального отдыха.
Среди путешественников Абхазия пользуется большой популярностью благодаря своим природным богатствам. На побережье Абхазии доступны различные виды активного отдыха и развлечений.
Местные курорты предлагают множество вариантов размещения от бюджетных гостиниц до роскошных отелей. Гастрономическая культура Абхазии порадует даже самых искушённых гурманов.
Независимо от времени года, отпуск в Абхазии будет незабываемым и полным позитивных эмоций. Не упустите возможность исследовать эту прекрасную страну и создать свои уникальные воспоминания.
Добавьте в свой отдых элемент роскоши — яхты сочи предоставляют возможность насладиться морской прогулкой в полном комфорте и отличной компании.
Чартер яхты становится все более популярным среди любителей отдыха. Путешествие на яхте позволяет насладиться красотой природы и расслабиться.
Выбор яхты — важный этап в организации вашего путешествия. Тип и размер яхты имеют большое значение, поэтому выбирайте то, что подходит именно вам.
При аренде яхты важно внимательно изучить все пункты договора. Некоторые компании могут предлагать дополнительные услуги, такие как капитан или экипаж.
Также стоит уделить внимание планированию маршрута вашего плавания. Исследуйте знаменитые пляжи и живописные ландшафты для незабываемых впечатлений.
Las compañías de exhibición de drones ofrecen una alternativa moderna a los fuegos artificiales. Nuestro equipo crea shows celestiales que combinan sostenibilidad, arte digital y precisión técnica en cada escena luminosa.
Los espectáculos de drones se han vuelto muy populares en la actualidad. Estos shows integran tecnología avanzada, creatividad y diversión. Las demostraciones de drones son frecuentemente vistas en festivales y celebraciones importantes.
Los drones iluminados crean patrones impresionantes en el cielo nocturno. Los asistentes se sorprenden con la sincronización y el despliegue de luces en el aire.
Muchos organizadores optan por contratar compañías especializadas para estos eventos. Dichas compañías tienen personal cualificado y los equipos más modernos disponibles.
El tema de la seguridad es vital en la planificación de estos shows. Se implementan protocolos rigurosos para garantizar la protección de los asistentes. El porvenir de los espectáculos de drones es alentador, gracias a las constantes mejoras en la tecnología.
Направление наркология лечение алкоголизма включает в себя мотивационную работу, детоксикацию, кодирование и реабилитацию. Комплексный подход в нашей клинике СПб.
В наркологической клинике пациенты находят поддержку и лечение для преодоления зависимостей. Здесь работают квалифицированные специалисты, готовые помочь каждому пациенту.
Клиника специализируется на лечении различных форм зависимостей, включая алкогольную и наркотическую. Лечение осуществляется с использованием сочетания медикаментозной терапии и психологической поддержки.
Специалисты работают с клиентами над психологическими аспектами их зависимостей. Это помогает пациентам не только избавиться от физической зависимости, но и предотвратить рецидивы.
Каждый пациент проходит реабилитацию в своем темпе, что позволяет избежать стрессовых ситуаций. Несмотря на сложности, победа над зависимостью крайне ценна.
Farmacia Asequible: Farmacia Asequible — supradyn energy contraindicaciones
RxFree Meds: RxFree Meds — RxFree Meds
https://rxfreemeds.shop/# turkish pharmacy online
http://enclomiphenebestprice.com/# enclomiphene online
No need to risk your balance — try out every function using the sweet bonanza demo, perfect for testing and enjoying anytime.
The Sweet Bonanza slot game has gained immense popularity among online casino enthusiasts. It offers colorful visuals along with thrilling gameplay that attracts many.
The unique characteristics of Sweet Bonanza are what truly set it apart. With its cascading reels, players can secure multiple victories on each spin.
Moreover, the game offers a free spins feature that enhances the gaming experience. This feature can lead to substantial payouts, making it even more enticing.
To sum up, Sweet Bonanza is a captivating slot game that offers much to players. The combination of its eye-catching graphics and generous rewards makes it a top choice for many.
cerave limpiador piel grasa opiniones: cГЎpsulas baratas — Farmacia Asequible
enclomiphene: enclomiphene testosterone — enclomiphene best price
Farmacia Asequible parafarmacias cerca de mi ubicaciГіn fundas para dientes en farmacias
http://rxfreemeds.com/# RxFree Meds
farmacias abiertas hoy en vigo: Farmacia Asequible — ozempic precio en farmacia espaГ±a
https://rxfreemeds.com/# pharmacy store window
https://enclomiphenebestprice.shop/# enclomiphene for men
farmacias en la cuesta Farmacia Asequible Farmacia Asequible
prospecto diprogenta: Farmacia Asequible — directo espaГ±a envios
https://farmaciaasequible.shop/# Farmacia Asequible
enclomiphene online: enclomiphene best price — enclomiphene testosterone
http://farmaciaasequible.com/# farmacia vigo online
RxFree Meds: buspar online pharmacy — rx pharmacy shop coupon code
Farmacia Asequible farmacia garrido Farmacia Asequible
https://farmaciaasequible.shop/# farmacia te
https://indomedsusa.com/# buy medicines online in india
medication canadian pharmacy: remedy rx pharmacy — best canadian online pharmacy reviews
online pharmacy lorazepam: MediSmart Pharmacy — estradiol patch online pharmacy
MexiMeds Express: MexiMeds Express — reputable mexican pharmacies online
boots pharmacy viagra cost: MediSmart Pharmacy — envision rx specialty pharmacy
https://medismartpharmacy.com/# reliable rx pharmacy coupon code
https://indomedsusa.com/# indian pharmacy online
MexiMeds Express: buying prescription drugs in mexico online — MexiMeds Express
IndoMeds USA: Online medicine order — indian pharmacy paypal
https://medismartpharmacy.shop/# tadalafil generic pharmacy
cheapest online pharmacy india: indian pharmacies safe — top 10 online pharmacy in india
https://indomedsusa.shop/# reputable indian online pharmacy
https://medismartpharmacy.com/# malaysia online pharmacy store
canadian drugs online: MediSmart Pharmacy — global pharmacy canada
best online pharmacies in mexico pharmacies in mexico that ship to usa MexiMeds Express
IndoMeds USA: india pharmacy — IndoMeds USA
Прямые поставки с завода-изготовителя без посредников. Наше производство ножничных подъемников гарантирует выгодную цену.
Ножничный подъемник — это одно из самых популярных средств подъемной техники. Данное устройство гарантирует безопасность и эффективность при подъеме людей и грузов.
Основное преимущество ножничного подъемника заключается в его компактности и маневренности. Это позволяет использовать их в помещениях с ограниченной высотой потолка и узкими проходами.
Следующий важный момент касается регулировки высоты, на которую можно поднять груз. Регулировка высоты обеспечивает гибкость в использовании данного оборудования для множества задач.
Применение ножничных подъемников охватывает множество отраслей, от строительства до сферы услуг. Их удобство и безопасность делают их незаменимыми в работе.
canada rx pharmacy world: MediSmart Pharmacy — canadian pharmacy uk delivery
https://indomedsusa.shop/# IndoMeds USA
https://meximedsexpress.com/# medication from mexico pharmacy
online pharmacy tegretol xr MediSmart Pharmacy generic pharmacy propecia
MexiMeds Express: mexico drug stores pharmacies — MexiMeds Express
Online medicine order: IndoMeds USA — indian pharmacy
https://meximedsexpress.com/# MexiMeds Express
IndoMeds USA: IndoMeds USA — pharmacy website india
MexiMeds Express: mexican online pharmacies prescription drugs — medication from mexico pharmacy
https://medismartpharmacy.shop/# us pharmacy viagra no prescription
buy medicines online in india IndoMeds USA IndoMeds USA
https://meximedsexpress.com/# MexiMeds Express
cheap canadian pharmacy: MediSmart Pharmacy — buying drugs from canada
https://indomedsusa.shop/# india online pharmacy
MexiMeds Express: mexican mail order pharmacies — mexican border pharmacies shipping to usa
mexican pharmaceuticals online: MexiMeds Express — MexiMeds Express
canada discount pharmacy: pharmacy book store — canada drug pharmacy
Наш каталог помогает быстро подобрать мастера для любого события. В разделе москва фотограф представлены профессионалы с проверенным опытом и отзывами.
Лучшие фотографы являются важной частью творческого мира. В этой публикации мы обсудим ряд выдающихся фотографов, чьи снимки оставляют неизгладимое впечатление.
В числе первых можно отметить фотографа, чьи работы известны повсюду. Данный фотограф умеет ловить моменты, запечатлевая их во всей красе.
Еще одним замечательным представителем является фотограф, который специализируется на портретной съемке. Его работы отличаются глубоким пониманием человека и его внутреннего мира.
В заключение стоит упомянуть мастера, который специализируется на съемке природы. Снимки этого фотографа поражают своей яркостью и детальной проработкой.
top online pharmacy india: IndoMeds USA — IndoMeds USA
При выборе помощницы для рождения ребёнка особенно важны прозрачность и безопасность. У нас вы узнаете, сколько составляет суррогатная мать цена и какие услуги входят в сотрудничество.
Суррогатное материнство представляет собой уникальную возможность для пар, которые сталкиваются с трудностями зачатия. Увеличение интереса к суррогатному материнству объясняется изменением общественного мнения и ростом технологий в области репродукции.
Различают два основных типа суррогатного материнства: традиционное и гестационное. В традиционном суррогатном материнстве суррогатная мать является биологической матерью ребенка, так как использует свои яйцеклетки. Гестационное суррогатное материнство предполагает, что эмбрион формируется вне тела суррогатной матери.
Перед тем, как принять решение о суррогатном материнстве, необходимо учитывать множество факторов. Потенциальные родители должны осознать все финансовые, юридические и эмоциональные нюансы, которые могут влиять на их решение. Ключевым моментом является выбор агентства, которое предоставит всестороннюю помощь на этапе подготовки и реализации суррогатного материнства.
Суррогатное материнство касается не только медицинских аспектов, но и социальных вопросов. Понимание и поддержка со стороны общества могут значительно повлиять на восприятие суррогатного материнства как положительного явления. Таким образом, суррогатное материнство может стать реальным шансом для семей, мечтающих о детях, при условии соблюдения этических норм и правовых требований.
http://medismartpharmacy.com/# asda pharmacy ventolin inhaler
MexiMeds Express: mexican drugstore online — mexico pharmacies prescription drugs
https://medismartpharmacy.shop/# uk pharmacy viagra prices
MexiMeds Express: MexiMeds Express — mexico drug stores pharmacies
https://indomedsusa.shop/# indianpharmacy com
MexiMeds Express mexico drug stores pharmacies mexican border pharmacies shipping to usa
https://medismartpharmacy.shop/# price of percocet at pharmacy
MexiMeds Express: buying from online mexican pharmacy — MexiMeds Express
https://meximedsexpress.com/# MexiMeds Express
target pharmacy fluoxetine: online pharmacy no prescription prednisone — good value pharmacy
IndoMeds USA: IndoMeds USA — indianpharmacy com
https://indomedsusa.com/# IndoMeds USA
ramesh rx pharmacy benadryl pharmacy domperidone new zealand pharmacy
purple pharmacy mexico price list: MexiMeds Express — pharmacies in mexico that ship to usa
https://indomedsusa.com/# IndoMeds USA
IndoMeds USA reputable indian pharmacies IndoMeds USA
order cialis online pharmacy: MediSmart Pharmacy — walgreen pharmacy hours
buying prescription drugs in mexico online: MexiMeds Express — medicine in mexico pharmacies
https://meximedsexpress.com/# MexiMeds Express
buy facebook advertising accounts website for buying accounts account trading
http://medismartpharmacy.com/# sporanox uk pharmacy
IndoMeds USA: cheapest online pharmacy india — IndoMeds USA
top online pharmacy india: IndoMeds USA — IndoMeds USA
online pharmacy europe Maxalt allegra at kaiser pharmacy
https://medismartpharmacy.com/# pharmacy store usa
best online pharmacies in mexico: mexico drug stores pharmacies — MexiMeds Express
MexiMeds Express mexican border pharmacies shipping to usa medicine in mexico pharmacies
best online thai pharmacy: MediSmart Pharmacy — premarin cream online pharmacy
месячные при спирали мирена купить спираль мирена в аптеке
https://medismartpharmacy.shop/# online pharmacy bc
Lanoxin: pharmacy drug store near me — best online pharmacy cialis
cheapest online pharmacy india: IndoMeds USA — online pharmacy india
https://medismartpharmacy.com/# evelyn bradley pharmacy artane
типография сайт типография печать
cheap facebook account account buying platform gaming account marketplace
mexico pharmacies prescription drugs: best online pharmacies in mexico — MexiMeds Express
indian pharmacy paypal IndoMeds USA india online pharmacy
http://meximedsexpress.com/# pharmacies in mexico that ship to usa
tranex fiale da bere dicloreum 150 compresse tegretol sciroppo
https://ordinasalute.com/# epiduo gel 0 3
Register on websites without using your real number. Our service helps you receive sms safely through virtual and disposable lines.
The receipt of SMS messages plays a significant role in today’s communication. They allow us to stay connected with friends, family, and colleagues.
With the rise of technology, SMS has turned into a key communication tool for numerous individuals. Whether it’s for alerts or notifications, SMS fulfills numerous functions.
However, some users face challenges with SMS delivery. Issues can arise due to network problems, phone settings, or technical glitches.
To tackle these problems, individuals should verify their network connectivity and device settings. Updating the device software can also help improve SMS functionality.
aircort aerosol prezzo: OrdinaSalute — niferex a cosa serve
levitra pharmacie sans ordonnance: PharmaDirecte — kenacort 40 sans ordonnance
mejor farmacia online cupon farmacia online barata farmacia online mascarilla ffp3
farmacia vaticana ordini online: Clinica Galeno — pharmacius parafarmacia online productos de farmacia
https://ordinasalute.com/# coupon farmacia online
https://clinicagaleno.com/# farmacia segura para comprar online
vitamine d pharmacie sans ordonnance: quel est le meilleur antidГ©presseur sans ordonnance — pharmacie infection urinaire sans ordonnance
https://clinicagaleno.com/# recigarum comprar sin receta
Г©ther pharmacie sans ordonnance: prix bГ©quille pharmacie sans ordonnance — test covid sans ordonnance pharmacie
https://pharmadirecte.com/# vaccination en pharmacie sans ordonnance
exemple ordonnance medicament: cynomel t3 en pharmacie sans ordonnance — viagra homme prix en pharmacie
acheter viagra gГ©nГ©rique stilnox sans ordonnance pharmacie qui vend viagra sans ordonnance au maroc
https://pharmadirecte.com/# cytotec pharmacie sans ordonnance
http://ordinasalute.com/# farmacia veterinaria online romania
acheter ronaxan 20 sans ordonnance: PharmaDirecte — buy sildenafil
Hello stewards of pure serenity!
Replacing your existing filter with the best air filters for pets can improve both performance and longevity. Top rated air purifiers for pets should be quiet, efficient, and easy to maintain for busy households. Getting the best air purifier for pet allergies is an investment in daily comfort and better living.
Installing an air purifier for dog smell neutralizes odors using activated carbon filters. These units are perfect for entryways or near pet crates air purifier for petsThey eliminate that «wet dog» aroma quickly and effectively.
Top Rated Air Purifiers for Pets That Clean Air — п»їhttps://www.youtube.com/watch?v=dPE254fvKgQ
May you enjoy remarkable filtered environments !
https://clinicagaleno.com/# farmacia en cúcuta online
clody 200 fiale: OrdinaSalute — farmacia valerio
diclofenac fiale prezzo: recensioni farmacia online — farmacia monti tiburtini
farmacia veterinaria online chile: Clinica Galeno — se puede comprar viagra sin receta medica?
avis pharmacie en ligne 24 en france vente de mГ©dicaments sans ordonnance viagra france commande viagra
https://clinicagaleno.shop/# venta online productos farmacia
diprosalic soluzione cutanea OrdinaSalute clensia senza ricetta
https://clinicagaleno.com/# farmacia estados unidos online
naprosyn 500 prezzo: OrdinaSalute — voltaren 100 mg
impetex crema prezzo OrdinaSalute diclofenac fiale prezzo
apotek sweden: apotek tbe vaccin — ta hГҐl i Г¶ronen apotek
fullmakt medisiner apotek [url=https://tryggmed.com/#]hГҐrsaks apotek[/url] pregnancy test apotek
hГ¶gt blodtryck rГ¶d i ansiktet: SnabbApoteket — kГ¶pa jod apotek
afbeelding medicijnen Medicijn Punt medicijnen op recept online bestellen
apotek acne: SnabbApoteket — ryggsГ¤ck 30 liter rea
https://snabbapoteket.shop/# online drugstore
apotheek on line: MedicijnPunt — recept medicijn
https://tryggmed.shop/# flex apotek
farmacie online: MedicijnPunt — online apotheek nederland zonder recept
apotek gaver alun pulver apotek hГҐndstГёtte apotek
apotek probiotika: internet apotek — apotek Г¶ppet till 22
https://zorgpakket.shop/# medicatie kopen
http://tryggmed.com/# isopropanol apotek
https://snabbapoteket.com/# thc test apotek
koronavaksine pГҐ apotek: Trygg Med — cpap maske apotek
de apotheker MedicijnPunt internet apotheek
п»їmedicijnen bestellen: internetapotheek nederland — landelijke apotheek
frenadol kopen in nederland: MedicijnPunt — medicatie bestellen online
blåbär gravid Snabb Apoteket apotek babybox gratis
farma online: bestellen apotheek — apotheek apotheek
https://snabbapoteket.com/# apotek hemkörning
digitale apotheek: Medicijn Punt — apotheek webshop
https://tryggmed.com/# thermometer apotek
http://zorgpakket.com/# online apotheek
snel medicijnen bestellen: MedicijnPunt — onl8ne drogist
recept medicijnen: MedicijnPunt — apotheek kopen
recept medicijn apotheek recept medicijnen op recept
apotek lagerstatus: hemleverans apotek — billigt apotek
medicijn: MedicijnPunt — online pharmacy netherlands
https://medimexicorx.shop/# mexico pharmacies prescription drugs
indian pharmacy: IndiaMedsHub — top 10 pharmacies in india
sildenafil mexico online: MediMexicoRx — MediMexicoRx
reputable indian pharmacies online pharmacy india mail order pharmacy india
¿Hola apasionados del azar ?
Muchas de estas plataformas permiten gestionar tu banca en mГєltiples divisas sin comisiones.casas de apuestas fuera de espaГ±aEsto es ideal para quienes juegan desde diferentes paГses o mueven grandes fondos.
Casas apuestas extranjeras ofrecen notificaciones vГa Telegram, correo o apps mГіviles con cuotas destacadas. Esto te mantiene informado sin necesidad de ingresar cada vez. Y puedes actuar rГЎpidamente ante oportunidades.
Casas apuestas extranjeras con promociones exclusivas — п»їhttps://casasdeapuestasfueradeespana.guru/
¡Que disfrutes de enormes premios mayores!
https://medimexicorx.com/# MediMexicoRx
ExpressCareRx ExpressCareRx clindamycin online pharmacy
Заказать дипломную работу http://diplomikon.ru недорого и без стресса. Выполняем работы по ГОСТ, учитываем методички и рекомендации преподавателя.
http://medimexicorx.com/# mexico pharmacies prescription drugs
pharmacy 1st viagra unicare pharmacy artane castle opening hours lexapro pharmacy card