UART (Universal Asynchronous Receiver/Transmitter) — универсальный асинхронный приёмопередатчик, интерфейс для связи цифровых устройств, предназначенный для передачи данных в последовательной форме. Очень распространён и весьма востребован, имеет аппаратную реализацию во многих микроконтроллерах (Wiki).
Pi4J предоставляет возможность работы с UART из Java. Все классы и интерфейсы для инициализации и работы с последовательным портом находятся в пакете com.pi4j.io.serial.*;.
Если вы ещё не установили Pi4J переходите на страницу Установка Pi4J на Raspberry Pi и Orange Pi, Banana Pi.
Внимание:
Всегда помните, что логические уровни сигнала шины GPIO составляет 3.3 В и использование сигналов с уровнем 5 В недопустимо!
- 1 Настройка UART на Raspberry Pi
- 2 Настройка UART на Orange Pi под Armbian
- 3 Интерфейс Serial
- 3.1 open(String, int, int, int, int, int)
- 3.2 open(String, int)
- 3.3 open(String, Baud, DataBits, Parity, StopBits, FlowControl)
- 3.4 open(SerialConfig)
- 3.5 close()
- 3.6 isOpen()
- 3.7 isClosed()
- 3.8 flush()
- 3.9 discardInput()
- 3.10 discardOutput()
- 3.11 discardAll()
- 3.12 sendBreak()
- 3.13 sendBreak(int)
- 3.14 setBreak(boolean)
- 3.15 setRTS(boolean)
- 3.16 setDTR(boolean)
- 3.17 getRTS()
- 3.18 getDTR()
- 3.19 getCTS()
- 3.20 getDSR()
- 3.21 getRI()
- 3.22 getCD()
- 3.23 addListener(SerialDataEventListener…)
- 3.24 removeListener(SerialDataEventListener…)
- 3.25 getFileDescriptor()
- 3.26 getInputStream()
- 3.27 getOutputStream()
- 3.28 isBufferingDataReceived()
- 3.29 setBufferingDataReceived(boolean)
- 4 Интерфейс SerialDataReader
- 5 Интерфейс SerialDataWriter
- 6 Подключение PL2303 к Orange Pi One
- 7 Похожие записи
Настройка UART на Raspberry Pi
По умолчанию последовательный порт на Raspberry Pi настроен как консольный порт для связи с ОС Linux. Если вы хотите использовать этот последовательный порт, вы должны отключить ОС от использования этого порта.
В Raspberry Pi введите следующую команду в окне терминала, чтобы включить UART и отключить консоль на последовательный порт,
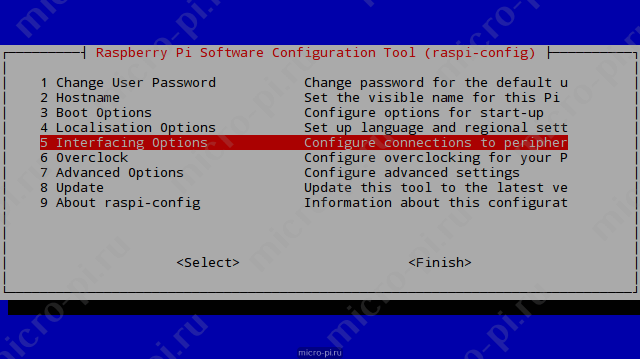
sudo raspi-config
Выберите «Interfacing Options»
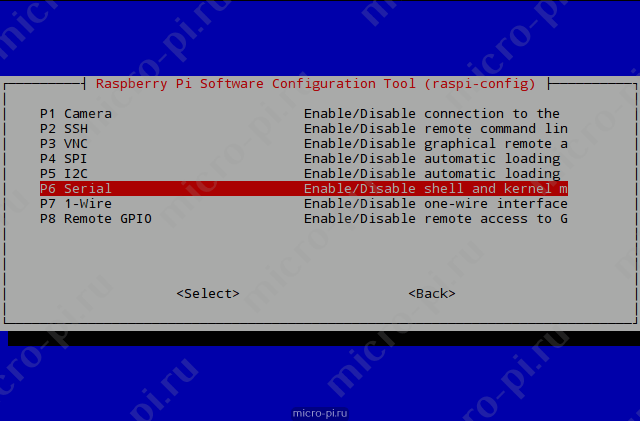
После «Interfacing Options» выберите «Serial», чтобы включить UART
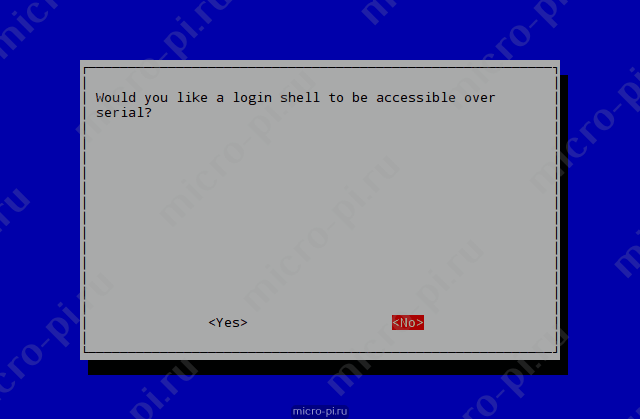
Затем выберите «No», чтобы отключить консоль на последовательный порт
В конце попросит включить аппаратный последовательный порт, выберите «Да»
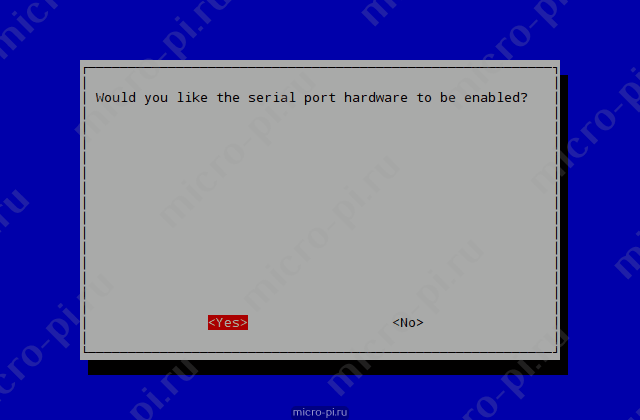
Всё, UART включен, консоль отключена
Перезагрузите Raspberry Pi.
Настройка UART на Orange Pi под Armbian
Все модели Orange Pi на базе SoC Allwinner H3 имеют по 4 UART порта. Один отдельный (UART0), что используется как консольный порт для связи с ОС Linux, а остальные находятся на гребёнке GPIO (UART1, UART2 и UART3). По умолчанию включён только UART0. Чтобы использовать и остальные, для начала необходимо включить их. UART2 так-же можно использовать как JTAG, а UART3 как SPI.
 Orange Pi Zero, Orange Pi Zero Plus, Orange Pi Zero Plus 2 и Orange Pi R1 имеют по 3 UART порта.
Orange Pi Zero, Orange Pi Zero Plus, Orange Pi Zero Plus 2 и Orange Pi R1 имеют по 3 UART порта.

И так, для начала сделаем резервную копию script.bin, чтобы, в случае чего, смогли вернуть обратно все настройки:
sudo cp /boot/script.bin /boot/script.bak
Чтобы редактировать бинарный файл script.bin, нужно конвертировать в редактируемый файл fex:
sudo bin2fex /boot/script.bin /boot/script.fex
Редактируем файл script.fex с помощью утилиты nano:
sudo nano /boot/script.fex
Находим разделы [uart0] ... [uart3]:
[uart0] uart_used = 1 uart_port = 0 uart_type = 2 uart_tx = port:PA04<2><1><default><default> uart_rx = port:PA05<2><1><default><default> [uart1] uart_used = 0 uart_port = 1 uart_type = 4 uart_tx = port:PG06<2><1><default><default> uart_rx = port:PG07<2><1><default><default> uart_rts = port:PG08<2><1><default><default> uart_cts = port:PG09<2><1><default><default> [uart2] uart_used = 0 uart_port = 2 uart_type = 4 uart_tx = port:PA00<2><1><default><default> uart_rx = port:PA01<2><1><default><default> uart_rts = port:PA02<2><1><default><default> uart_cts = port:PA03<2><1><default><default> [uart3] uart_used = 0 uart_port = 3 uart_type = 4 uart_tx = port:PA13<3><1><default><default> uart_rx = port:PA14<3><1><default><default> uart_rts = port:PA15<3><1><default><default> uart_cts = port:PA16<3><1><default><default>
Включаем нужный UART порт, для этого нужно установить параметр uart_used = 1. Я включил все порты, но это не рекомендуется:
[uart0] uart_used = 1 uart_port = 0 uart_type = 2 uart_tx = port:PA04<2><1><default><default> uart_rx = port:PA05<2><1><default><default> [uart1] uart_used = 1 uart_port = 1 uart_type = 4 uart_tx = port:PG06<2><1><default><default> uart_rx = port:PG07<2><1><default><default> uart_rts = port:PG08<2><1><default><default> uart_cts = port:PG09<2><1><default><default> [uart2] uart_used = 1 uart_port = 2 uart_type = 4 uart_tx = port:PA00<2><1><default><default> uart_rx = port:PA01<2><1><default><default> uart_rts = port:PA02<2><1><default><default> uart_cts = port:PA03<2><1><default><default> [uart3] uart_used = 1 uart_port = 3 uart_type = 4 uart_tx = port:PA13<3><1><default><default> uart_rx = port:PA14<3><1><default><default> uart_rts = port:PA15<3><1><default><default> uart_cts = port:PA16<3><1><default><default>
Сохраняем и закрываем файл:
Ctrl X, Y (Yes), Enter
Конвертируем измененный файл script.fex обратно в script.bin:
sudo fex2bin /boot/script.fex /boot/script.bin
Перезагружаем ОС:
sudo reboot
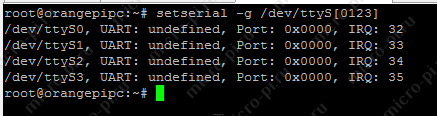
Проверяем доступные последовательные порты под Linux:
setserial -g /dev/ttyS[0123]
Интерфейс Serial
Этот интерфейс предоставляет набор функций для настройки и инициализации последовательной связи. Ниже вы найдёте описание всех методов этого интерфейса.
public interface Serial extends
SerialDataReader,
SerialDataWriter,
AutoCloseable {}
open(String, int, int, int, int, int)
Открывает и инициализирует последовательное соединение и устанавливает параметры связи.
public void open(
String device,
int baud,
int dataBits,
int parity,
int stopBits,
int flowControl)
throws IOException;
Параметры
String device — Адрес устройства последовательного порта. Вы можете использовать константу DEFAULT_COM_PORT, если хотите получить доступ к последовательному порту по умолчанию. ВНИМАНИЕ: параметр device может содержать не более 128 символов.
int baud — Скорость передачи данных для последовательного порта. (Пользовательская скорость передачи не поддерживается).
int dataBits — Биты данных. (5, 6, 7, 8).
int parity — Параметр четности. (None, Event, Odd, Mark, Space).
int stopBits — Стоповые биты. (1, 2).
int flowControl — Управление потоком передачи данных. (none, hardware, software).
Бросает
IOException — в случае какой-либо ошибки.
open(String, int)
Открывает и инициализирует последовательное соединение и устанавливает параметры связи. Этот метод будет использовать следующие параметры последовательной конфигурации по умолчанию:
- DATA BITS = 8
- PARITY = NONE
- STOP BITS = 1
- FLOW CONTROL = NONE
public void open(String device, int baud) throws IOException;
Параметры
String device — Адрес устройства последовательного порта. Вы можете использовать константу DEFAULT_COM_PORT, если хотите получить доступ к последовательному порту по умолчанию. ВНИМАНИЕ: параметр device может содержать не более 128 символов.
int baud — Скорость передачи данных для последовательного порта. (Пользовательская скорость передачи не поддерживается).
Бросает
IOException — в случае какой-либо ошибки.
open(String, Baud, DataBits, Parity, StopBits, FlowControl)
Открывает и инициализирует последовательное соединение и устанавливает параметры связи.
public void open(
String device,
Baud baud,
DataBits dataBits,
Parity parity,
StopBits stopBits,
FlowControl flowControl)
throws IOException;
Параметры
String device — Адрес устройства последовательного порта. Вы можете использовать константу DEFAULT_COM_PORT, если хотите получить доступ к последовательному порту по умолчанию. ВНИМАНИЕ: параметр device может содержать не более 128 символов.
Baud baud — Скорость передачи данных для последовательного порта. (Пользовательская скорость передачи не поддерживается).
DataBits dataBits — Биты данных. (5, 6, 7, 8).
Parity parity — Параметр четности. (None, Event, Odd, Mark, Space).
StopBits stopBits — Стоповые биты. (1, 2).
FlowControl flowControl — Управление потоком передачи данных. (none, hardware, software).
Бросает
IOException — в случае какой-либо ошибки.
open(SerialConfig)
Открывает и инициализирует последовательное соединение и устанавливает параметры связи.
public void open(SerialConfig serialConfig) throws IOException;
Параметры
SerialConfig serialConfig — Объект конфигурации последовательной связи, содержащий адрес устройства, скорость передачи данных, бит данных, контроль четности, стоп-биты и параметры управления потоком.
Бросает
IOException — в случае какой-либо ошибки.
close()
Этот метод вызывается, чтобы закрыть текущий открытый последовательный порт.
public void close() throws IllegalStateException, IOException;
Бросает
IllegalStateException — если последовательный порт еще не открыт.
IOException — в случае какой-либо ошибки.
isOpen()
Этот метод вызывается, чтобы определить, если последовательный порт открыт.
public boolean isOpen();
Возвращает
значение true, если последовательный порт уже открыт.
isClosed()
Этот метод вызывается, чтобы определить, если последовательный порт закрыт.
public boolean isClosed();
Возвращает
значение true, если последовательный порт находится в закрытом состоянии.
flush()
Принудительная передача любых оставшихся данных в буфере передачи последовательного порт. Обратите внимание, что это не заставляет передавать данные, но отбрасывает их.
public void flush() throws IllegalStateException, IOException;
Бросает
IllegalStateException — если последовательный порт еще не открыт.
IOException — в случае какой-либо ошибки.
discardInput()
Отбрасывает любые данные в буфере последовательного приема (ввода).
public void discardInput() throws IllegalStateException, IOException;
Бросает
IllegalStateException — если последовательный порт еще не открыт.
IOException — в случае какой-либо ошибки.
discardOutput()
Отбрасывает любые данные в последовательном буфере передачи (вывода).
public void discardOutput() throws IllegalStateException, IOException;
Бросает
IllegalStateException — если последовательный порт еще не открыт.
IOException — в случае какой-либо ошибки.
discardAll()
Отбрасывает любые данные в буферах последовательного приема и передачи.
public void discardAll() throws IllegalStateException, IOException;
Бросает
IllegalStateException — если последовательный порт еще не открыт.
IOException — в случае какой-либо ошибки.
sendBreak()
Отправляет сигнал BREAK подключенному устройству не менее 0.25 секунды и не более 0.5 секунд
public void sendBreak() throws IllegalStateException, IOException;
Бросает
IllegalStateException — если последовательный порт еще не открыт.
IOException — в случае какой-либо ошибки.
sendBreak(int)
public void sendBreak(int duration) throws IllegalStateException, IOException;
Параметры
int duration — Длительность (в миллисекундах) для отправки сигнала BREAK.
Бросает
IllegalStateException — если последовательный порт еще не открыт.
IOException — в случае какой-либо ошибки.
setBreak(boolean)
Отправляет постоянный сигнал BREAK на подключенное устройство. (включение/выключение сигнала BREAK) При включении будет посылать непрерывный поток нулевых битов, а передача других данных невозможна.
public void setBreak(boolean enabled) throws IllegalStateException, IOException;
Параметры
boolean enabled — Состояние включения или выключения для управления сигналом BREAK.
Бросает
IllegalStateException — если последовательный порт еще не открыт.
IOException — в случае какой-либо ошибки.
setRTS(boolean)
Управляет состоянием контакта RTS (запрос-на-отправку). Когда включено, это приведет к тому, что вывод RTS будет находиться в состоянии HIGH.
public void setRTS(boolean enabled) throws IllegalStateException, IOException;
Параметры
boolean enabled — Включить или отключить состояние, чтобы контролировать состояние контакта RTS.
Бросает
IllegalStateException — если последовательный порт еще не открыт.
IOException — в случае какой-либо ошибки.
setDTR(boolean)
Контролирует состояние вывода DTR (состояние готовности к передаче данных). При включении этого вывод DTR будет установлен в высокое состояние.
public void setDTR(boolean enabled) throws IllegalStateException, IOException;
Параметры
boolean enabled — Включить или отключить состояние, чтобы контролировать состояние контакта RTS.
Бросает
IllegalStateException — если последовательный порт еще не открыт.
IOException — в случае какой-либо ошибки.
getRTS()
Возвращает состояние вывода RTS (запрос на отправку).
public boolean getRTS() throws IllegalStateException, IOException;
Бросает
IllegalStateException — если последовательный порт еще не открыт.
IOException — в случае какой-либо ошибки.
getDTR()
Возвращает состояние вывода DTR (состояние готовности к передаче данных).
public boolean getDTR() throws IllegalStateException, IOException;
Бросает
IllegalStateException — если последовательный порт еще не открыт.
IOException — в случае какой-либо ошибки.
getCTS()
Возвращает состояние вывода CTS (clean-to-send).
public boolean getCTS() throws IllegalStateException, IOException;
Бросает
IllegalStateException — если последовательный порт еще не открыт.
IOException — в случае какой-либо ошибки.
getDSR()
Возвращает состояние вывода DSR (data-set-ready).
public boolean getDSR() throws IllegalStateException, IOException;
Бросает
IllegalStateException — если последовательный порт еще не открыт.
IOException — в случае какой-либо ошибки.
getRI()
Возвращает состояние вывода RI (ring-indicator).
public boolean getRI() throws IllegalStateException, IOException;
Бросает
IllegalStateException — если последовательный порт еще не открыт.
IOException — в случае какой-либо ошибки.
getCD()
Возвращает состояние вывода CD (carrier-detect).
public boolean getCD() throws IllegalStateException, IOException;
Бросает
IllegalStateException — если последовательный порт еще не открыт.
IOException — в случае какой-либо ошибки.
addListener(SerialDataEventListener…)
Метод для регистрации слушателя для событий последовательных данных (приём данных).
public void addListener(SerialDataEventListener... listener);
Параметры
SerialDataEventListener... listener — Экземпляр класса, который реализует интерфейс SerialListener.
removeListener(SerialDataEventListener…)
Метод для отмены регистрации слушателя для событий последовательных данных (приём данных).
public void removeListener(SerialDataEventListener... listener);
Параметры
SerialDataEventListener... listener — Экземпляр класса, который реализует интерфейс SerialListener.
getFileDescriptor()
Этот метод возвращает дескриптор файла последовательного устройства
public int getFileDescriptor();
getInputStream()
Этот метод возвращает поток входных данных для буфера приема последовательного порта
public InputStream getInputStream();
getOutputStream()
Этот метод возвращает поток выходных данных для буфера передачи последовательного порта
public InputStream getOutputStream();
isBufferingDataReceived()
Этот метод возвращает состояние буферизации данных, полученных от последовательного устройства / порта.
public boolean isBufferingDataReceived();
Возвращает
true, если включена буферизация; иначе false
setBufferingDataReceived(boolean)
Этот метод управляет состоянием буферизации данных, полученных от последовательного устройства / порта.
Если состояние буферизации включено, все байты данных, полученные от последовательного порта, будут скопированы в буфер приема данных. Вы можете использовать методы getInputStream() или read() для доступа к этим данным. Данные также будут доступны через событие SerialDataEvent. Важно знать, что если вы используете буферизацию данных, данные будут продолжать скапливаться в памяти, пока ваша программа не освободит поток данных.
Если состояние буферизации отключено, то все байты данных, полученные от последовательного порта, НЕ будут скопированы в буфер приема данных, но будут включены в полезную нагрузку данных события SerialDataEvent. Если ваша программа не использует данные, полученные от последовательного порта, тогда вы должны отключить состояние буферизации данных, чтобы предотвратить утечку памяти.
public void setBufferingDataReceived(boolean enabled);
Параметры
boolean enabled — Устанавливает состояние поведения буферизации.
Интерфейс SerialDataReader
Интерфейс SerialDataReader предоставляет набор функций для чтения данных из последовательного порта.
public int available() throws IllegalStateException, IOException; public void discardData() throws IllegalStateException, IOException; public byte[] read() throws IllegalStateException, IOException; public byte[] read(int length) throws IllegalStateException, IOException; public void read(ByteBuffer buffer) throws IllegalStateException, IOException; public void read(int length, ByteBuffer buffer) throws IllegalStateException, IOException; public void read(OutputStream stream) throws IllegalStateException, IOException; public void read(int length, OutputStream stream) throws IllegalStateException, IOException; public void read(Collection<ByteBuffer> collection) throws IllegalStateException, IOException; public void read(int length, Collection<ByteBuffer> collection) throws IllegalStateException, IOException; public CharBuffer read(Charset charset) throws IllegalStateException, IOException; public CharBuffer read(int length, Charset charset) throws IllegalStateException, IOException; public void read(Charset charset, Writer writer) throws IllegalStateException, IOException; public void read(int length, Charset charset, Writer writer) throws IllegalStateException, IOException;
Интерфейс SerialDataWriter
Интерфейс SerialDataWriter предоставляет набор функций для записи данных в последовательный порт.
public void write(byte[] data, int offset, int length) throws IllegalStateException, IOException; public void write(byte ... data) throws IllegalStateException, IOException; public void write(byte[] ... data) throws IllegalStateException, IOException; public void write(ByteBuffer... data) throws IllegalStateException, IOException; public void write(InputStream input) throws IllegalStateException, IOException; public void write(Charset charset, char[] data, int offset, int length) throws IllegalStateException, IOException; public void write(Charset charset, char ... data) throws IllegalStateException, IOException; public void write(char ... data) throws IllegalStateException, IOException; public void write(Charset charset, CharBuffer... data) throws IllegalStateException, IOException; public void write(CharBuffer ... data) throws IllegalStateException, IOException; public void write(Charset charset, CharSequence ... data) throws IllegalStateException, IOException; public void write(CharSequence ... data) throws IllegalStateException, IOException; public void write(Charset charset, Collection<? extends CharSequence> data) throws IllegalStateException, IOException; public void write(Collection<? extends CharSequence> data) throws IllegalStateException, IOException; public void writeln(Charset charset, CharSequence ... data) throws IllegalStateException, IOException; public void writeln(CharSequence ... data) throws IllegalStateException, IOException; public void writeln(Charset charset, Collection<? extends CharSequence> data) throws IllegalStateException, IOException; public void writeln(Collection<? extends CharSequence> data) throws IllegalStateException, IOException;
Подключение PL2303 к Orange Pi One
Для начала нужно выбрать платформу, если у вас Raspberry Pi, тогда этого делать не надо.
PlatformManager.setPlatform(Platform.ORANGEPI);
Чтобы работать с последовательным портом нужно создать экземпляр класса Serial с помощью утилиты SerialFactory.
Serial serial = SerialFactory.createInstance();
Данные могут быть отправлены несколькими способами, самый простой способ — с использованием методов write(...) и writeln(...). Также можно использовать и выходной поток OutputStream outputStream = serial.getOutputStream();.
serial.write(data);
Прочесть полученные данные можно с помощью методов read(...), но в таком случае нужно постоянно проверять наличие данных в буффере. Лучще всего зарегистрировать слушатель SerialDataEventListener.
Слушатель SerialDataEventListener — это уведомляемый о поступлении новых данных в последовательном пору объект. Чтобы слушатель смог реагировать на событие источника он должен быть им зарегистрирован, т.е. подключен к источнику. Listener должен реализовывать метод dataReceived(...) для получения и обработки уведомлений о событии.
Listener находится в постоянном ожидании, пока в источнике, в котором он зарегистрирован, не наступит соответствующее событие, при возникновении которого слушатель получает управление. Также слушателю передается объект события (Serial который содержется в SerialDataEvent), чтобы он смог правильно на него отреагировать. Таким образом, источник вызывает метод-обработчик события (public void dataReceived(SerialDataEvent event)), определенный в классе, являющемся блоком прослушивания.
После обработки события слушатель возвращает управление. Таким образом, для обработки события вызываются только те слушатели, которые на него «подписались», т.е. были зарегистрированы источником.
serial.addListener(new SerialDataEventListener() {
@Override
public void dataReceived(SerialDataEvent event) {
try {
byte[] data = event.getSerial().read();
/* data - полученные данные */
} catch (IOException e) {
e.printStackTrace();
}
}
});
Создаём объект конфигурации последовательной связи (SerialConfig), содержащий адрес устройства, скорость передачи данных, бит данных, контроль четности, стоп-биты и параметры управления потоком.
SerialConfig config = new SerialConfig();
и задаём эти конфигурации.
config.device(OrangePiSerial.UART3_COM_PORT)
.baud(Baud._9600)
.dataBits(DataBits._8)
.parity(Parity.NONE)
.stopBits(StopBits._1)
.flowControl(FlowControl.NONE);
С помощью метода open(...) открываем UART порт.
serial.open(config);
Схема подключения
Чтобы проверить UART на Orange Pi, я подключил его к компьютеру через преобразователь PL2303. В этом случае используется порт UART3.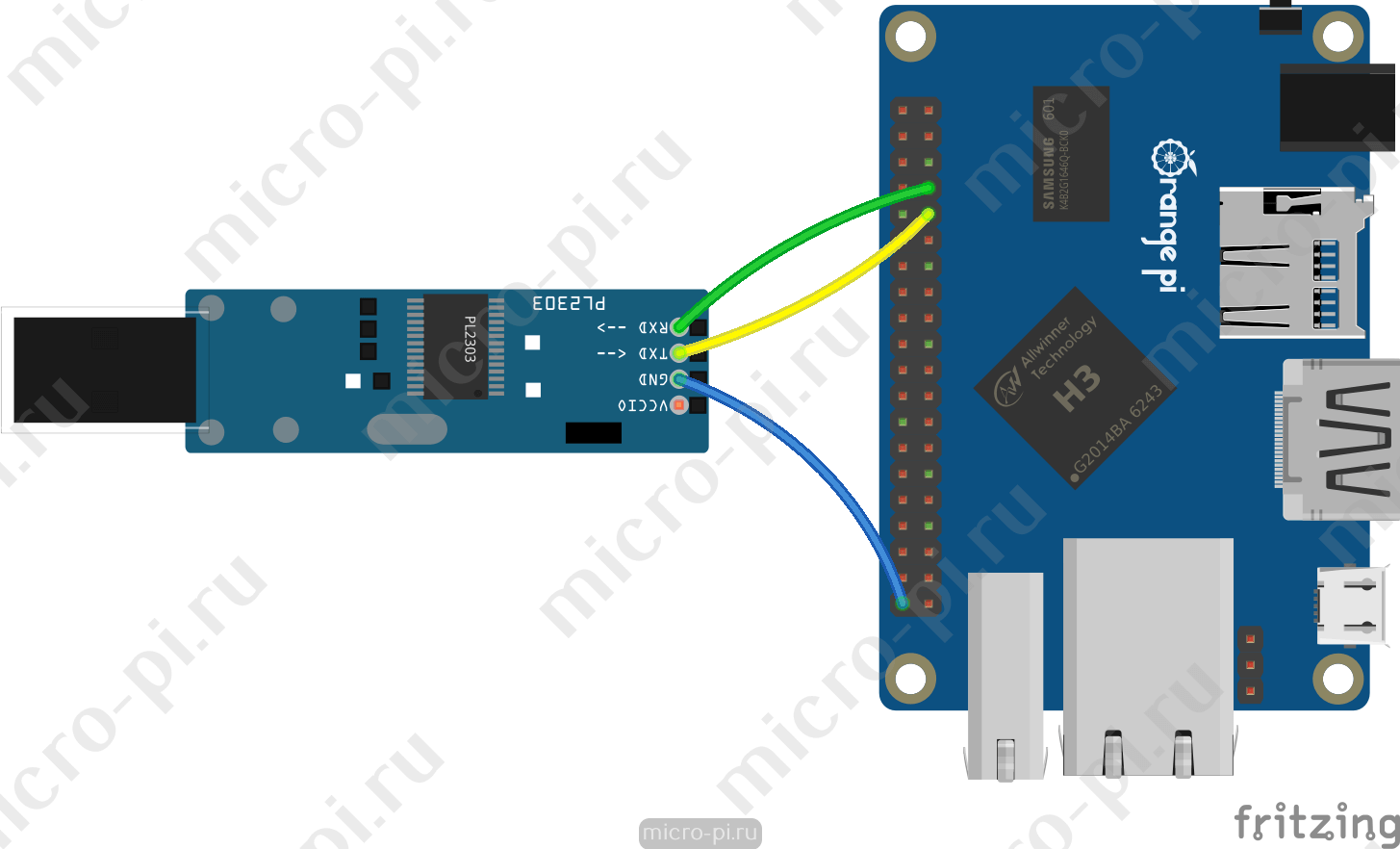
Пример программы
Эта программа получает по UART данные в виде текста и выводит данный текст в консоль, также выводит текст в шестнадцатеричном формате. Для отправки использовал Terminal v1.9b.
import com.pi4j.io.serial.Baud;
import com.pi4j.io.serial.DataBits;
import com.pi4j.io.serial.FlowControl;
import com.pi4j.io.serial.OrangePiSerial;
import com.pi4j.io.serial.Parity;
import com.pi4j.io.serial.Serial;
import com.pi4j.io.serial.SerialConfig;
import com.pi4j.io.serial.SerialDataEvent;
import com.pi4j.io.serial.SerialDataEventListener;
import com.pi4j.io.serial.SerialFactory;
import com.pi4j.io.serial.StopBits;
import com.pi4j.platform.Platform;
import com.pi4j.platform.PlatformManager;
import com.pi4j.util.Console;
public class PL2303OrangePiOne {
public static void main(String args[]) {
try {
PlatformManager.setPlatform(Platform.ORANGEPI);
Console console = new Console();
console.promptForExit();
Serial serial = SerialFactory.createInstance();
serial.addListener(new SerialDataEventListener() {
@Override
public void dataReceived(SerialDataEvent event) {
try {
console.println("[HEX DATA] " + event.getHexByteString("0x", " ", ""));
console.println("[ASCII DATA] " + event.getAsciiString());
} catch (IOException e) {
e.printStackTrace();
}
}
});
SerialConfig config = new SerialConfig();
config.device(OrangePiSerial.UART3_COM_PORT)
.baud(Baud._9600)
.dataBits(DataBits._8)
.parity(Parity.NONE)
.stopBits(StopBits._1)
.flowControl(FlowControl.NONE);
serial.open(config);
console.waitForExit();
} catch (Exception e) {
e.printStackTrace();
}
}
}
Проверяем код:
- создаём java файл и вставляем код;
nano PL2303OrangePiOne.java
- компилируем файл;
javac -classpath .:classes:/opt/pi4j/lib/'*' PL2303OrangePiOne.java
- запускаем программу.
sudo java -classpath .:classes:/opt/pi4j/lib/'*' PL2303OrangePiOne
Результат
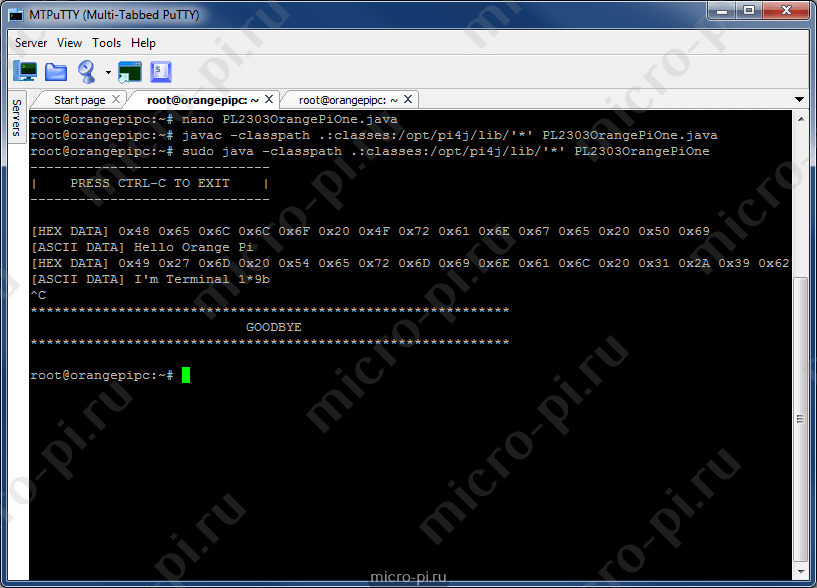
 Как мы видим данные получены и программа работает правильно.
Как мы видим данные получены и программа работает правильно.