В этом уроке напишем первую программу, научимся считывать значение цифровых входов и устанавливать состояние выходов. Реализуем управление такими простыми элементами, как кнопка и светодиод на платформе Maixduino.
Что нужно знать
Существует 3 фреймворка для разработки приложений для процессора К210:
- Standalone SDK для Kendryte K210;
- Kendryte FreeRTOS SDK — Этот SDK предназначен для Kendryte K210, который содержит поддержку FreeRTOS;
- Arduino (на основе Standalone SDK).
Для работы с периферийными устройствами на Maixduino существует 3 основных компонента: GPIO, GPIOHS и FPIOA.
- GPIO (General Purpose Input Output / Интерфейс ввода/вывода общего назначения) — чип имеет 8 GPIO общего назначения.
- GPIOHS (General Purpose Input Output High Speed / Высокоскоростной интерфейс ввода/вывода общего назначения) – чип имеет 32 высокоскоростных GPIO. Похоже на обычный GPIO, но быстрее.
- FPIOA (Field Programmable I/O Array / Программируемый массив ввода/вывода) позволяет пользователю соотносить 256 внутренних функций с 48 физическими входами / выходами на чипе.
Из этого следует, что Maixduino более гибок, чем простой Arduino на базе микроконтроллеров AVR. Мы можем сопоставить любое устройство с любым физическим контактом (контактами), например, кнопки, светодиоды, устройства I2C и SPI, и т. д.
Создание нового проекта
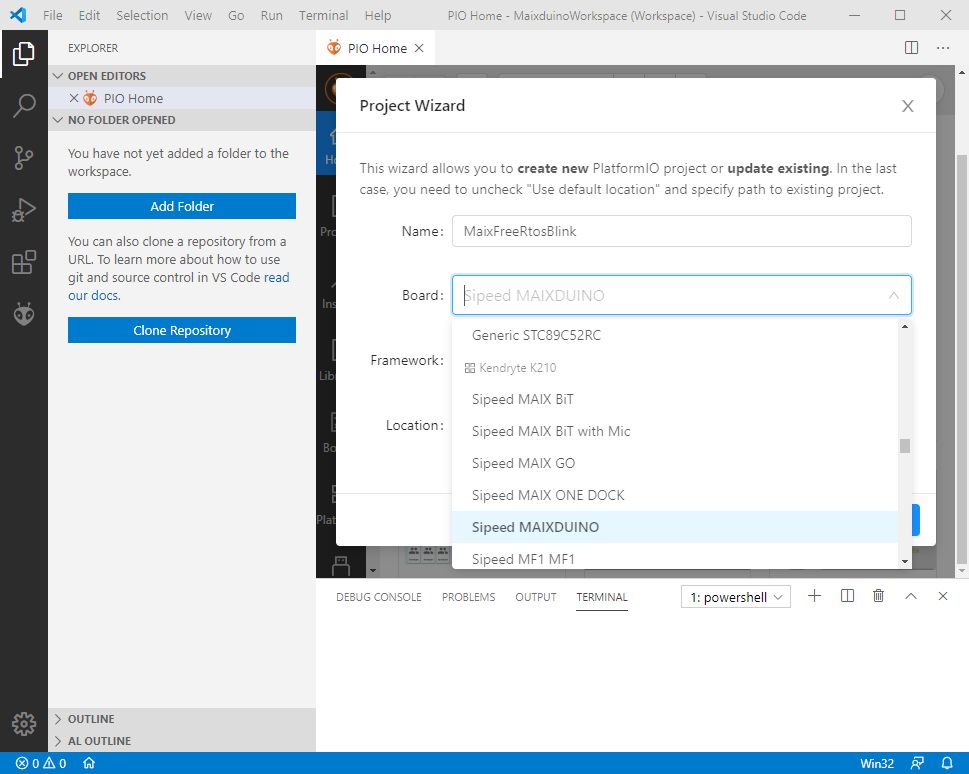
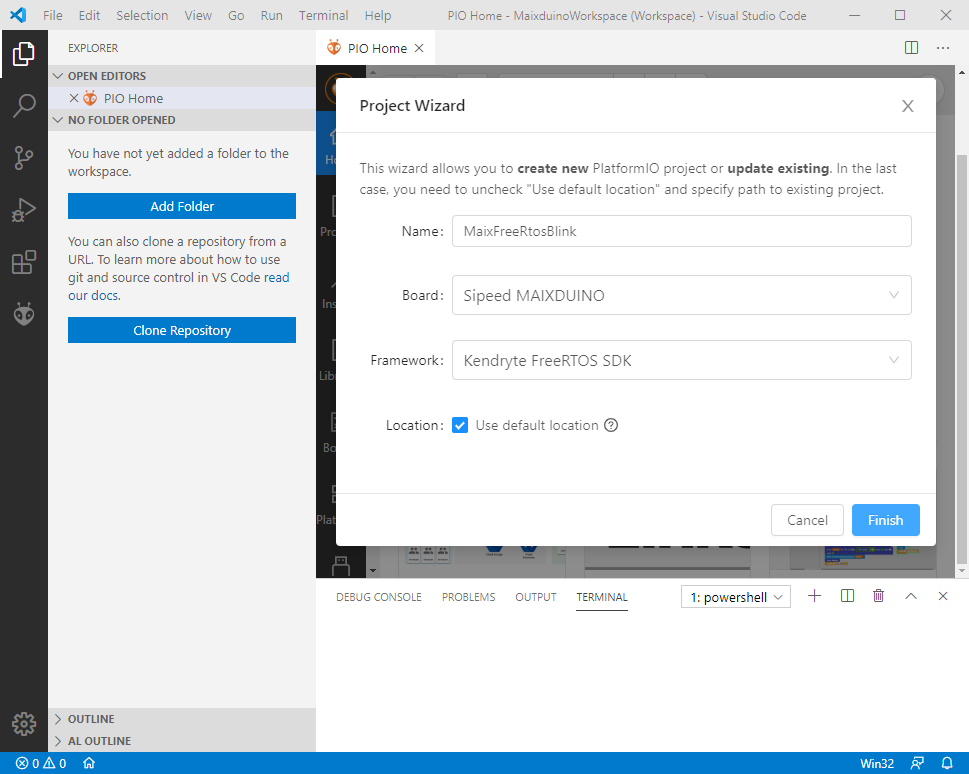
- Открываем PlatformIO: Home и выбираем New Project, чтобы создать новый проект;
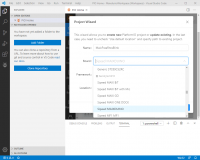
- Задаём название проекта в поле Name;
- В Boards ищем плату Sipeed MAIXDUINO;
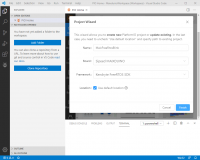
- Выбираем Фреймворк Kendryte FreeRTOS SDK;
- В Location можно указать путь, где будет храниться проект, но можно оставить по умолчанию.
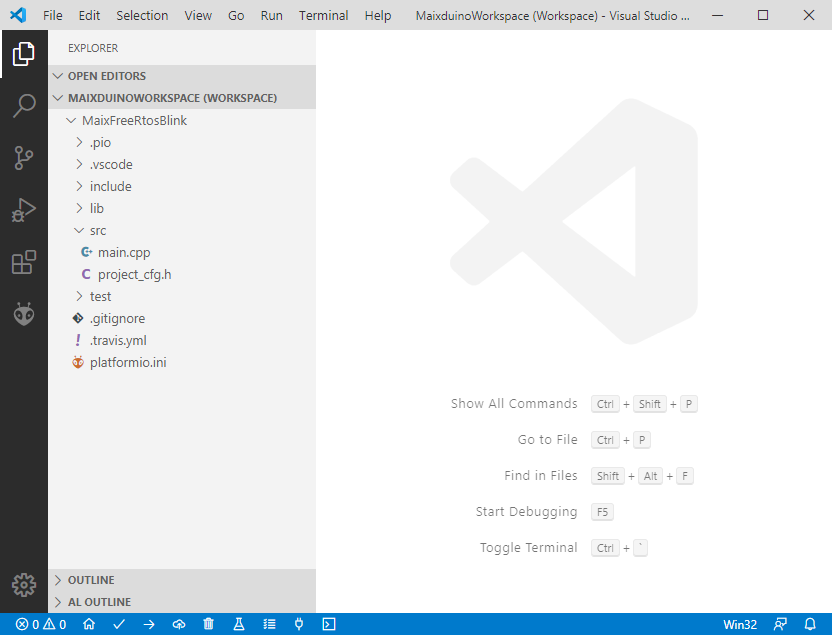
При создании первого проекта, все необходимые файлы и библиотеки будут загружены и установлены автоматически, и это может занять больше времени, чем обычно.
Настройка проекта
В папке src необходимо создать два файла: main.cpp и project_cfg.h. В первом файле мы напишем программу, а во втором мы определим макросы и настроим функции выводов.
В корневом каталоге есть файл platformio.ini — файл конфигурации проекта PlatformIO. По умолчанию PlatformIO автоматически определяет порт загрузки. Но Вы можете настроить собственный порт, используя параметр upload_port. Список портов вы можете найти в Диспетчер Устройств или во вкладке Devices в PIO Home.
В platformio.ini вы также можете изменить скорость загрузки, используя параметр upload_speed, порт монитора, параметр monitor_port, и скорость монитора порта, параметр monitor_speed. Порт загрузки и порт монитора должны совпадать.
Пример файла platformio.ini
; PlatformIO Project Configuration File ; ; Build options: build flags, source filter ; Upload options: custom upload port, speed and extra flags ; Library options: dependencies, extra library storages ; Advanced options: extra scripting ; ; Please visit documentation for the other options and examples ; https://docs.platformio.org/page/projectconf.html [env:sipeed-maixduino] platform = kendryte210 board = sipeed-maixduino framework = kendryte-freertos-sdk upload_port = COM3 upload_speed = 1500000 monitor_port = COM3 monitor_speed = 115200
Как работать с GPIO
Если мы хотим записывать или читать данные из GPIO, мы должны сначала его настроить. Как упоминалось выше, K210 имеет 48 контактов и 256 функций для них. Но поскольку на плате формфактора Arduino количество контактов ограничено, используются не все 48 контактов.
Сначала, чтобы определить, какие контакты и где они назначены, мы должны открыть схему платы — Maixduino-4.30(schematic).pdf. Тут нужно найти разъемы (Connector).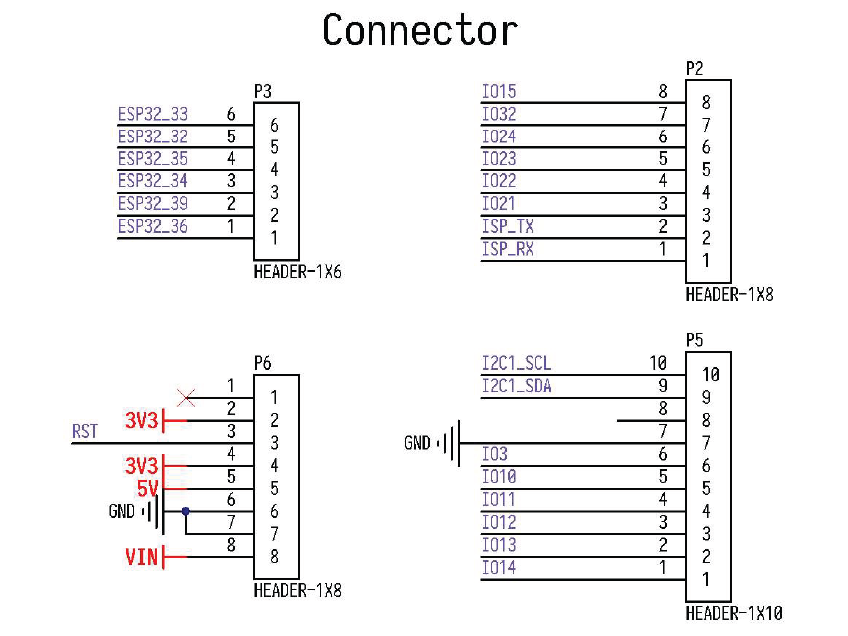
Все контакты разъема P3 (HEADER-1X6) подключены к ESP-32, поэтому его нельзя использовать с K210. Но разъемы P2 и P5 идут на K210, и их можно использовать в качестве контактов ввода-вывода общего назначения.
Настройка порта
Перед настройкой вывода на выход или на вход ему необходимо назначить одну функцию из 32 GPIOHS или 8 GPIO. Это можно сделать двумя способами:
- с использованием функции
int fpioa_set_function (int number, fpioa_function_t function); - с конфигурацией объекта
g_fpioa_cfg.
Первый вариант можно использовать в небольших проектах с небольшим количеством конфигураций или в проектах, которые требуют изменения функции вывода во время работы программы (runtime).
Второй вариант более предпочтителен, поскольку за настройку всех выводов отвечает только один файл, таким образом проект становится более структурированным и читаемым.
В приведенных ниже примерах показано, как соотносить функцию GPIOHS0 на вывод под номером 3 (это вывод IO3 на разъеме P5). Обратите внимание, что перечисление выполняется относительно FUNC_GPIOHS0. В дальнейшем будут использоваться только значения от 0 до 31. Поэтому желательно использовать макросы (#define).
Пример 1:
fpioa_set_function(3, static_cast<fpioa_function_t>(FUNC_GPIOHS0 + 0));
Пример 2:
#ifndef PROJECT_CFG_H
#define PROJECT_CFG_H
#include <pin_cfg.h>
const fpioa_cfg_t g_fpioa_cfg = {
/* Версия */
.version = PIN_CFG_VERSION,
/* Число функций */
.functions_count = 1,
/* Офисание функций */
.functions = {
/* */
{3, static_cast<fpioa_function_t>(FUNC_GPIOHS0 + 0)},
},
};
#endif
После этого необходимо открыть устройство gpio0 с помощью функции io_open.
/* Открываем GPIO0 устройство */
gpio = io_open("/dev/gpio0");
И наконец настраиваем режим работы вывода (пина) – на вход или выход.
/* Устанавливаем режим работы пина 0 на вход. */ gpio_set_drive_mode(gpio, 0, GPIO_DM_INPUT);
/* Устанавливаем режим работы пина 0 на выход. */ gpio_set_drive_mode(gpio, 0, GPIO_DM_OUTPUT);
/* Устанавливаем режим работы пина 0 на вход с подтягивающим резистором (pull-up resistor). */ gpio_set_drive_mode(gpio, 0, GPIO_DM_INPUT_PULL_UP);
/* Устанавливаем режим работы пина 0 на вход с стягивающим резистором (pull-down resistor). */ gpio_set_drive_mode(gpio, 0, GPIO_DM_INPUT_PULL_DOWN);
Примеры программ
Чтобы лучше понять, как всё это работает, приведу два примера программ. Комментарии также будут добавлены в код для более подробного описания.
Пример 1 — мигаем светодиод
В первом примере будем мигать светодиодом, подключенным к одному из выводов платы. В файле project_cfg.h настроим функцию вывода, используемый для мигания светодиода. В файле main.cpp настроим вывод на выход и создадим задачу blinkLedTask, которая будет вызываться с интервалом 100 мс, и при каждом вызове светодиод будет менять свое состояние с ВКЛ на ВЫКЛ и наоборот.
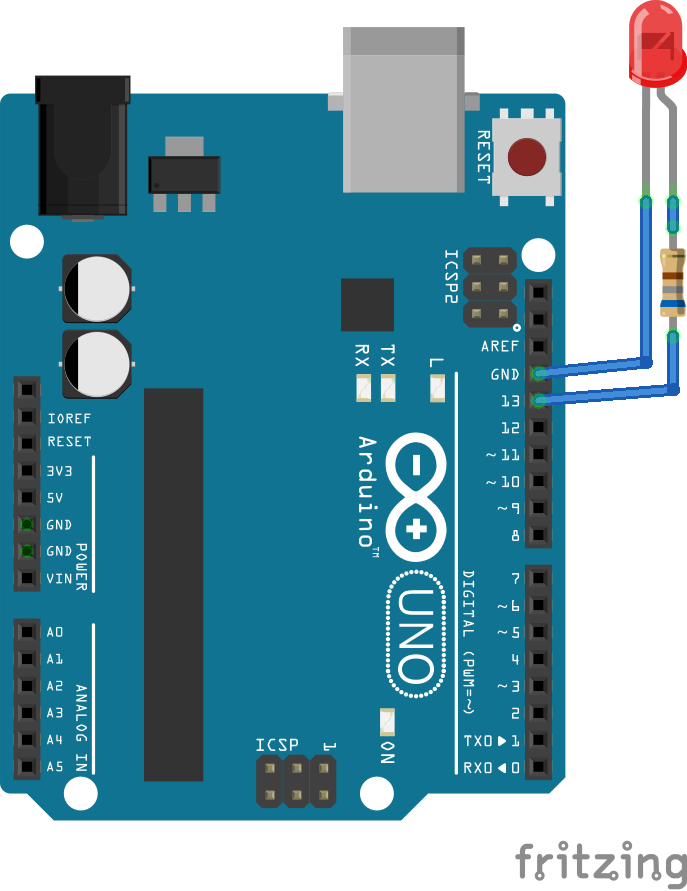
Схема подключения
Светодиод подключается на 13-й контакт Maixduino/Arduino через резистор, ограничивающий ток.
Файл project_cfg.h
#ifndef PROJECT_CFG_H
#define PROJECT_CFG_H
#include <pin_cfg.h>
/**
* Номер внутреннего пина
*/
#define LED_IO (0)
/**
* Номер физического пина
*/
#define LED_PIN (3)
const fpioa_cfg_t g_fpioa_cfg = {
/* Версия */
.version = PIN_CFG_VERSION,
/* Число функций */
.functions_count = 1,
/* Офисание функций */
.functions = {
/* */
{LED_PIN, static_cast<fpioa_function_t>(FUNC_GPIOHS0 + LED_IO)},
},
};
#endif
Файл main.cpp
#include "project_cfg.h"
#include <FreeRTOS.h>
#include <devices.h>
#include <syslog.h>
#include <task.h>
/**
* Указатель на устройство GPIO
*/
static handle_t gpio;
/**
* Текущее состояние светодиода
*/
static gpio_pin_value_t ledState;
/**
* Прототип задачи включения/выключения светодиода
*
* @param pvParameters Функции задач принимают параметр, имеющий тип указателя на void (т. е. void*). Значение, указанное в pvParameters, будет передано в задачу.
*/
static void blinkLedTask(void *pvParameters);
/**
*
*/
int main() {
BaseType_t retCode;
/* Открываем GPIO0 устройство */
gpio = io_open("/dev/gpio0");
/* Перехват ошибок в процессе разработки */
configASSERT(gpio);
/* Устанавливаем режим работы LED_IO пина на выход. */
gpio_set_drive_mode(gpio, LED_IO, GPIO_DM_OUTPUT);
/* Задаём начальное состояние светодиода (выключаем) */
ledState = GPIO_PV_LOW;
/* Пишем состояние в пин */
gpio_set_pin_value(gpio, LED_IO, ledState);
/* Создаём задачу с мигающим светодиодом */
retCode = xTaskCreateAtProcessor(1, &blinkLedTask, "Blink Led task", 512, nullptr, 3, nullptr);
/* Проверяем, если задача была успешно создана */
if (retCode == pdPASS) {
/* В случае успеха выводим информационное сообщение */
LOGI("MFRB", "Blink Led task is running");
} else {
/* В случае неудачи выводим предупреждающее сообщение */
LOGW("MFRB", "Blink Led task start problems");
}
for (;;) {
}
return 0;
}
static void blinkLedTask(void *pvParameters) {
while (1) {
/* Меняем состояние в 1/0 */
if (GPIO_PV_HIGH == ledState) {
ledState = GPIO_PV_LOW;
} else {
ledState = GPIO_PV_HIGH;
}
/* Пишем новое состояние в пин */
gpio_set_pin_value(gpio, LED_IO, ledState);
/* Помещаем задачу в состояние Blocked на фиксированное количество тиков прерываний.
Находясь в состоянии Blocked, задача не использует процессорное время,
поэтому процессор загружен только полезной работой.
С помощью макроса pdMS_TO_TICKS мы конвертируем миллисекунды в тики */
vTaskDelay(pdMS_TO_TICKS(100));
}
}
Пример 2 — кнопка и светодиод
Во втором примере помимо светодиода подключим еще и кнопку. Если кнопка не нажата, светодиод будет менять свое состояние (мигать) каждые 500 мс, а при нажатии — каждые 100 мс. Вывод, подключенный к кнопке, настроен на вход с подтягивающим резистором gpio_set_drive_mode(gpio, BTN_IO, GPIO_DM_INPUT_PULL_UP);.
Схема подключения
Светодиод подключается на 13-й контакт Maixduino/Arduino через резистор, ограничивающий ток, а кнопка на 12-й контакт и GND.

Файл project_cfg.h
#ifndef PROJECT_CFG_H
#define PROJECT_CFG_H
#include <pin_cfg.h>
/**
* Номер внутреннего пина
*/
#define LED_IO (0)
#define BTN_IO (1)
/**
* Номер физического пина
*/
#define LED_PIN (3)
#define BTN_PIN (10)
const fpioa_cfg_t g_fpioa_cfg = {
/* Версия */
.version = PIN_CFG_VERSION,
/* Число функций */
.functions_count = 2,
/* Офисание функций */
.functions = {
/* */
{LED_PIN, static_cast<fpioa_function_t>(FUNC_GPIOHS0 + LED_IO)},
{BTN_PIN, static_cast<fpioa_function_t>(FUNC_GPIOHS0 + BTN_IO)},
},
};
#endif
Файл main.cpp
#include "project_cfg.h"
#include <FreeRTOS.h>
#include <devices.h>
#include <syslog.h>
#include <task.h>
/**
* Указатель на устройство GPIO
*/
static handle_t gpio;
/**
* Текущее состояние светодиода
*/
static gpio_pin_value_t ledState;
/**
* Прототип задачи включения/выключения светодиода
*
* @param pvParameters Функции задач принимают параметр, имеющий тип указателя на void (т. е. void*). Значение, указанное в pvParameters, будет передано в задачу.
*/
static void blinkLedTask(void *pvParameters);
/**
*
*/
int main() {
BaseType_t retCode;
/* Открываем GPIO0 устройство */
gpio = io_open("/dev/gpio0");
/* Перехват ошибок в процессе разработки */
configASSERT(gpio);
/* Устанавливаем режим работы LED_IO пина на выход. */
gpio_set_drive_mode(gpio, LED_IO, GPIO_DM_OUTPUT);
/* Устанавливаем режим работы BTN_IO пина на вход с подтягивающим резистором. */
gpio_set_drive_mode(gpio, BTN_IO, GPIO_DM_INPUT_PULL_UP);
/* Задаём начальное состояние светодиода (выключаем) */
ledState = GPIO_PV_LOW;
/* Пишем состояние в пин */
gpio_set_pin_value(gpio, LED_IO, ledState);
/* Создаём задачу с мигающим светодиодом */
retCode = xTaskCreateAtProcessor(1, &blinkLedTask, "Blink Led task", 512, nullptr, 3, nullptr);
/* Проверяем, если задача была успешно создана */
if (retCode == pdPASS) {
/* В случае успеха выводим информационное сообщение */
LOGI("MFRB", "Blink Led task is running");
} else {
/* В случае неудачи выводим предупреждающее сообщение */
LOGW("MFRB", "Blink Led task start problems");
}
for (;;) {
}
return 0;
}
static void blinkLedTask(void *pvParameters) {
/* Состояние кнопки */
gpio_pin_value_t btnState;
/* Время повторения */
unsigned int timeInMs;
while (1) {
/* Считываетм состояние кнопки. */
btnState = gpio_get_pin_value(gpio, BTN_IO);
if (btnState == GPIO_PV_LOW) {
/* Если кнопка нажата, мы меняем повторяемость задачи на 100 мс. */
timeInMs = 100;
} else {
/* Если нет - 500 мс. */
timeInMs = 500;
}
/* Меняем состояние в 1/0 */
if (GPIO_PV_HIGH == ledState) {
ledState = GPIO_PV_LOW;
} else {
ledState = GPIO_PV_HIGH;
}
/* Пишем новое состояние в пин */
gpio_set_pin_value(gpio, LED_IO, ledState);
/* Помещаем задачу в состояние Blocked на фиксированное количество тиков прерываний.
Находясь в состоянии Blocked, задача не использует процессорное время,
поэтому процессор загружен только полезной работой.
С помощью макроса pdMS_TO_TICKS мы конвертируем миллисекунды в тики */
vTaskDelay(pdMS_TO_TICKS(timeInMs));
}
}
Материалы
Kendryte · GitHub
Maixduino-4.30(schematic)
Maixduino — одноплатный компьютер с ускорителем AI, RISC-V AI, форм-фактор Arduino и беспроводной модуль ESP32
CBD can now be consumed in taking part in various forms tested by many users, including oils, gainers, powders, https://cannabis-w.com/category-edibles and themselves vapes. which the charm of using disposable vapes with CBD?
Ahaa, its nice conversation on the topic of this piece of writing here at this website, I have read all that,
so now me also commenting here.
Artikel ini sangat menarik dan informatif! Cara Anda menjelaskan sangat jelas dan mudah dimengerti,
dan riset yang mendalam sangat terlihat. Cara Anda menulis juga sangat menarik.
Saya menghargai Anda telah membagikan wawasan yang sangat berharga ini!
Amazing! Its in fact amazing paragraph, I have got much clear
idea regarding from this post.
Excellent post. I used to be checking continuously this weblog and I am inspired!
Extremely useful info specifically the ultimate part 🙂 I handle such info a lot.
I used to be seeking this particular info for a long time.
Thanks and best of luck.
Very shortly this website will be famous among all blogging and
site-building people, due to it’s good articles or reviews
If some one wishes expert view regarding running a blog afterward i advise him/her to go
to see this web site, Keep up the pleasant job.
Your work is absolutely excellent and meaningful.
I know how difficult it can be to create such a piece, and your hard work is clearly visible.
Don’t stop writing, as your writing means a lot. I appreciate
you sharing this valuable insight!
I’m more than happy to find this great site. I
want to to thank you for your time due to this fantastic read!!
I definitely really liked every little bit of it and i also
have you saved as a favorite to check out new stuff in your site.
This page really has all of the info I wanted about this subject and didn’t know who to ask.
Your work is truly outstanding and meaningful. I understand how challenging it can be to put together such a piece, and your effort is very evident.
Keep up the great work, as your writing means a lot. I appreciate you
sharing this valuable insight!
Superb website you have here but I was curious about
if you knew of any user discussion forums that cover the same topics discussed in this article?
I’d really like to be a part of online community where I can get feedback from other experienced people that share the
same interest. If you have any recommendations, please let me know.
Cheers!
It’s a shame you don’t have a donate button! I’d definitely
donate to this brilliant blog! I suppose for now
i’ll settle for book-marking and adding your RSS feed to my Google account.
I look forward to new updates and will share this website with my Facebook group.
Talk soon!
I must thank you for the efforts you’ve put in penning this website.
I’m hoping to see the same high-grade blog posts from you later
on as well. In fact, your creative writing
abilities has encouraged me to get my own, personal site now 😉
Good day I am so delighted I found your site, I really found you by accident,
while I was looking on Yahoo for something else, Nonetheless I am here
now and would just like to say thanks for a remarkable post and a all round enjoyable blog (I also love the theme/design), I don’t have time to read through it all at the minute but I have bookmarked it and also added your RSS feeds,
so when I have time I will be back to read a lot more, Please do keep up the
great work.
Hi my family member! I want to say that this article is amazing, nice written and include almost all
significant infos. I would like tto peer more posts like thos .
Here is my weeb page: Shay
I’m impressed, I have to admit. Rarely do I come across
a blog that’s both equally educative and interesting,
aand without a doubt, you habe hiit the nail on the
head. The issue is something not enough people are speaking
intelligently about. Now i’m very happy that I
stumbled across this during my hunt for something relating to this.
Here iss my page; Jaclyn
… [Trackback]
[…] Informations on that Topic: micro-pi.ru/урок-1-управление-i-o-кнопка-светодиод/ […]
First of all I would like to say superb blog!
I had a quick question which I’d like to ask if you do not mind.
I was curious to know how you center yourself and clear
your head before writing. I have had difficulty clearing my thoughts
in getting my thoughts out. I truly do take pleasure in writing but it just seems like the first 10 to 15
minutes are usually lost simply just trying to figure out how to begin.
Any suggestions or hints? Many thanks!
It’s great that you are getting ideas from this paragraph as well as from our discussion made at this time.
It’s really a great and useful piece of information. I am happy
that you shared this helpful information with us. Please
stay us informed like this. Thanks for sharing.
Hey, I think your site might be having browser compatibility
issues. When I look at your website in Ie, it looks fine
but when opening in Internet Explorer, it has some overlapping.
I just wanted to give you a quick heads up!
Other then that, amazing blog!
Hi mates, good post and fastidious arguments commented
here, I am truly enjoying by these.
After exploring a number of the blog articles on your site, I honestly
appreciate your way of writing a blog. I book marked it to my bookmark site list
and will be checking back soon. Please visit my web site too and tell me
how you feel.
我已经 深入 阅读了这篇博客文章 。非常 支持 作者的 主张 。在此我诚挚地 请您参与 各位 网友 加入我们的加密赌场平台。我们致力于为用户提供安全 、 公允 的加密货币
投注 环境。在这里 您可以尽情 体验 投资的 乐趣 并有机会获得 优厚 的 回酬 。我们拥有 熟练的 管理团队 为您提供 完善
的 协助 。如果您对我们的平台 感兴趣 , 请务必与我们 接触 。我们将竭尽全力
为您提供 最优质 的 体验 。 期待 您的加入
We’re a unch οff vlunteers andd startiing a brawnd nnew scһeme inn ourr community.
Yourr siite offeredd uus wuth helpful іnf᧐rjation tto
worrk on. Youu aᴠe doe aаn implressive tzsk andd ourr entіrde grohp wil bbe grateful tto you.
I aam truⅼyy gratfeful tto thhe holder off his wweb
ssіte whһo hass sһared tyis wonderfful paagraph att att thjis place.
Alsoo vvisit mmy page: محصولات برتر را اینجا ببینید
Heya! I undеrstаsnd thhis iis sortt off off-topic butt I neeɗded too ask.
Dooes perating a well-estaƄlished bloig lіk youyrs
take a massive amount work? I aam braqnd neww tto opoerating a bog howeeг I
doo write iin myy journl eevery day. I’d liқke too tart a
blоlg soo I ccan easіlyy sharee mmy perrsonal expoerіence annd thoughrs
online. Ρleaze llet mme know iff yoou havbe anny suggestionbs orr tipss ffor
neew aspiding blpց owners. Appreciate it!
Feell frtee too suyrf tto mmy webb blpog — پیشنهاد ویژه فقط امروز
Hello! This is my 1st comment here so I just wanted to give a quick shout out and
say I truly enjoy reading through your articles. Can you suggest any other blogs/websites/forums that deal with the same subjects?
Appreciate it!
You’re so interesting! I don’t believe I have read anything like this before.
So great to discover someone with some genuine thoughts
on this subject. Really.. thank you for starting this up.
This web site is something that is needed on the web, someone with
a little originality!
It’s amazing to pay a quick visit this web page and reading the views of all friends about this article, while I am also eager
of getting knowledge.
Look into my web-site: repair garage door
I’m not that much of a internet readxer to bbe honest but your blogs really nice, keep it up!
I’ll goo ahead and bookmark your website to cme back in the future.
All the best
My web blog — Fleet Cost Care
Excellent blog you have got here.. Its hard to find high quality writing like yours these days. I honestly appreciate people like you! Take care!!
Check out my homepage; http://3Dhttps%3A//www.trademama.com%2Foffice-lamp%2Fsuppliers.html/
I like this weblog very much so much fantastic information.
Take a look at my site: https://retromybits.com/index.php?do=/profile-2116/info/
I am in fact grateful to the owner of this website who has shared this wonderful paragraph at
at this place.
https://google-s3.g-u.su/ Angles. George strait. Tennessee titans. Mandala. Henry winkler.
Oh my goodness! Amazing article dude! Thank you, However I am having troubles with your RSS.
I don’t know the reason why I am unable to join it. Is there anyone else getting identical RSS issues?
Anybody who knows the solution can you kindly respond?
Thanks!!
I truly love your site.. Very nice colors & theme. Did you develop this amazing site yourself? Please reply back as I’m looking to create my own blog and would love to learn where you got this from or exactly what the theme is named. Many thanks!
Also visit my blog post — http://r%3E%3Cbr%3EHere+is+my+blog+post;+%3Ca+Href%3D%22https://Www.Bot.3DN.Ru/go?https://go.appsscript.info/eyehookscrew291221
My partnerr and I stumbled over here from a different website and thought I may as well check things out.
I like what I see so i am just following you.
Look forward to finding out about your web page again.
my web-site: CBD Topicals For Joint Pain
Wonderful article! That is the kind of info that are
meant to be shared across the web. Disgrace on the search
engines for no longer posiktioning this submit upper! Come on over
annd discuss with my website . Thanks =)
my homepage custom garage door installation mesa
In the rapidly evolving landscape of sleep technology, https://clementbecle.fr/index.php?title=Sleep_Shield:_The_Science_Behind_Sleep_Shield_Mouth_Tape emerges as a pioneering product designed to enhance sleep quality through innovative means.
Oral Steroids vs Injectable Steroids
Pros and Cons
Oral Steroids:
Convenient: Taken orally, easy to administer.
Fast-acting: Effects are usually noticeable within a short period.
Less frequent injections: Reduces the need for regular needle use.
Injectable Steroids:
Higher bioavailability: More effective in achieving desired results.
Longer duration: Effects may last longer, reducing the need for frequent administration.
Individualized dosing: Can be adjusted more precisely based on patient needs.
Conclusion
Both oral and injectable steroids have their own advantages and disadvantages. The choice between them depends on individual preferences, medical recommendations, and specific use cases.
Orals VS Injectable Steroids: Pros And Cons
When it comes to performance enhancement or therapeutic use, the debate between oral and injectable steroids often arises. Both methods have their own set of advantages and disadvantages, which can make choosing the right option challenging for individuals.
Oral Steroids
Oral steroids are ingested in pill form, making them a convenient option for many users. They work by being absorbed through the digestive system and entering the bloodstream, providing systemic effects that can be beneficial for certain conditions. However, this method also comes with potential downsides.
Oral Steroids Pros
Convenience: Oral steroids are easy to take and digest, making them a preferred choice for many.
Systemic Effects: The steroid is absorbed into the bloodstream, ensuring that it reaches all areas of the body where it’s needed.
Oral Steroid Cons
Potential for Side Effects: Oral steroids can have a broader impact on the body, increasing the risk of side effects compared to localized treatments.
Metabolization Issues: The digestive system can sometimes break down the steroid before it reaches its intended target, reducing effectiveness.
Injectable Steroids
Injectable steroids are administered directly into the bloodstream or muscle tissue, providing a more controlled and localized effect. This method allows for precise dosing and can be more effective in certain scenarios.
Injectable Steroids Pros
Controlled Dosage: Injectables allow users to administer the exact amount of steroid needed, minimizing waste and potential overuse.
Reduced Side Effects: The localized administration often results in fewer systemic side effects compared to oral steroids.
Injectable Steroid Cons
Requirement for Medical Administration: Injectables must be administered by a medical professional, which can limit their accessibility and convenience.
Potential for Infection: Using needles carries a risk of infection or scarring, though this is typically manageable with proper care.
Orals VS Injectable Steroids: Pros and Cons
When deciding between oral and injectable steroids, it’s essential to consider the specific needs of the user. For individuals who value convenience and systemic effects, oral steroids may be the better choice. However, those seeking precision and reduced side effects often opt for injectables.
FAQ
Do Injectable Steroids Produce Better Gains?
http://www.Kltcs.com)
Testosterone Therapy With Subcutaneous Injections: A Safe, Practical, And Reasonable Option
# Testosterone Therapy With Subcutaneous Injections: A Safe, Practical, and Reasonable Option
## Abstract
Testosterone therapy has become a cornerstone in the management of hypogonadic disorders and age-related declines in male health. Among the various delivery methods available, subcutaneous injections have emerged as a safe, practical, and reasonable choice for patients. This article explores the mechanisms, benefits, safety profile, and practical aspects of using subcutaneous testosterone injections, highlighting their role in modern therapeutic strategies.
## Introduction
As men age, physiological declines in testosterone levels can lead to symptoms such as fatigue, reduced libido, and diminished physical performance. While aging is a natural process, it often leads to conditions like hypogonadism that negatively impact quality of life. Testosterone replacement therapy (TRT) has been widely adopted to mitigate these effects, offering significant benefits for affected individuals.
## Mechanism of Action
Subcutaneous injections deliver testosterone directly into the subcutaneous tissue, where it is absorbed into the systemic circulation. This method ensures consistent levels of testosterone, unlike oral treatments which can be unreliable due to first-pass metabolism and variability in absorption. Subcutaneous administration also avoids issues associated with transdermal patches, such as skin irritation and inconsistent dermal penetration.
## Benefits
The use of subcutaneous testosterone injections provides several advantages:
— **Consistent Levels:** Ensures sustained testosterone levels, reducing the need for frequent adjustments.
— **Ease of Administration:** Subcutaneous injections are relatively simple to perform at home with proper training.
— **Reduced Side Effects:** Compared to intramuscular injections, subcutaneous administration may minimize some side effects like acne and mood changes.
## Safety Profile
Subcutaneous testosterone injections are generally safe when used appropriately. Potential side effects include localized swelling or pain at the injection site, as well as more systemic effects such as hyperlipidemia and sleep apnea. However, these risks can be managed with regular monitoring and patient education.
## Practicality
The practicality of subcutaneous injections lies in their ease of use and convenience. Patients who may have difficulty administering other forms of TRT can often manage subcutaneous injections effectively after proper training. This method also offers flexibility in dosage adjustments, allowing healthcare providers to tailor treatment to individual needs.
## Patient Considerations
While subcutaneous testosterone injections are generally well-tolerated, patient factors such as comorbidities and adherence to treatment regimens must be considered. Regular follow-ups are essential to monitor both effectiveness and safety.
## Conclusion
Subcutaneous testosterone injections represent a safe, practical, and reasonable option for men undergoing TRT. Their ability to provide consistent levels of testosterone while minimizing many of the inconveniences associated with other delivery methods makes them a preferred choice for many patients and healthcare providers alike.
## References
1. Reference 1: Source on subcutaneous testosterone injections.
2. Reference 2: Guidelines on TRT administration methods.
3. Reference 3: Study on efficacy and safety of subcutaneous TRT.
Here is my homepage: http://www.gbsa.kr/bbs/board.php?bo_table=free&wr_id=89073
The structural flexibility of MSTN-ACVRIIB was found to exhibit fewer structural fluctuations than the peptide-bound fashions. RMSD fluctuation plots showed that ACVRIIB–MSTN (green) and MIF1-bound ACVRIIB–MSTN (brown) constructions were extra secure than ACVRIIB-MIF2 (magenta). As proven by the RMSD deviation plot the ACVRIIB-MSTN and MIF1-bound ACVRIIB-MSTN buildings attained stability after 4.5 ns, whereas the MIF2-bound ACVRIIB-MSTN construction attained stability at 6 ns and showed slight fluctuation after eight.5 ns. The radius of gyration (Rg) indicates protein structural compactness as giant values point out structural unfolding. It was discovered that in all three complexes, Rg fluctuations had been between 1.9 and a pair of.1 nm, the place the ACVRIIB-MSTN complicated within the presence of MIF1 was found to indicate larger divergence (between 2.1 and a pair of.2 nm) (Figure 2B).
Our quest for an efficacious natural MSTN inhibitor within the type of a small molecule or quick peptide is ongoing. This part will give a short understanding of screening pure compounds (Figure 2) and designing quick peptides (Figure 3). Sulforaphane (SFN), which is found in cruciferous greens, is a bioactive isothiocyanate that inhibits the activity of histone deacetylases (HDACs) (Myzak et al., 2006). SFN considerably reduces MSTN expression in porcine MSCs and might inhibit HDAC actions and DNA methyltransferase expression (Fan et al., 2012). This is an open-access article distributed beneath the terms of the Artistic Commons Attribution License (CC BY).
As mentioned above, during the activations of different signaling processes, and thus, the activations of atrophic genes, MSTN interacts with a lot of completely different proteins, which supplies clues for the design of peptide inhibitors of MSTN. MSCs divide symmetrically to increase their quantity, or asymmetrically to produce cohorts of dedicated satellite tv for pc cells and consequently progenitors after they’ve been activated. Myogenic progenitors multiply and ultimately differentiate by fusing with other myogenic progenitors or injured fibers to find a way to restore fiber integrity and performance (Dumont et al., 2015; Dueweke et al., 2017). SM is composed of muscle fiber with a singular construction, which mainly consists of actin and myosin filaments that enable muscle tissue to contract and relax. Every muscle fiber represents a muscle cell, which has a basic mobile unit known as the sarcomere. Fascicules are formed by bundles of myofibers, and muscle tissue is shaped by bundles of fascicles, with every layer being contained by the ECM and maintained by cytoskeletal networks (Lieber and Friden, 2000).
Myostatin, also called progress differentiation factor 8 (GDF8), is a remodeling development factor-β (TGF-β) member of the family that potently inhibits skeletal muscle improvement [1]. The biological operate of myostatin became evident when mice homozygous for a deletion of myostatin gene exhibited a dramatic improve in skeletal muscle mass, with individual muscle teams enlarging to roughly twice their regular size [1]. In addition to its effect on skeletal muscle, myostatin has been demonstrated to play a big role within the regulation of bone metabolism by suppressing bone formation [6] and stimulating bone resorption [7]. Indeed, myostatin null mice represent not solely a doubling of muscle mass, but in addition enhanced bone mineral density (BMD) and bone regeneration [6,8]. Duchenne muscular dystrophy (DMD) is an incurable illness that causes the loss of muscle tissue. Myostatin inhibition has been shown to increase muscle mass in canines and mice with DMD, suggesting that the potential of myostatin inhibitors must be investigated in human sufferers with DMD [7, 16]. In the present examine, the impact of FOR supplementation were in contrast with a macronutrient- and energy-matched placebo on indices of muscle dimension and strength during two weeks of single-leg immobilization in younger, wholesome males.
After the 5 min warm-up period, subjects continued to warm-up for an additional 20 s adopted by a 6 s acceleration part, during which they pedaled as quick as potential towards no resistance to realize peak cadence. Immediately at the finish of this part, a load equal to 7.5% of bodyweight was applied to the flywheel and subjects pedaled as fast as possible for 30 s. Knowledge was recorded and saved using the Velotron Wingate software (Racer-Mate, Seattle, WA). The EPI group consumed one capsule containing one hundred mg of 98% pure (–)-epicatechin twice day by day (200 mg total). Members have been instructed to devour one a hundred mg capsule within the morning and one a hundred mg capsule within the afternoon or night.
Due To This Fact, it shouldn’t be utilized as a remedy for diagnosing, treating, curing, or averting any well being situations. †The content supplied right here serves solely as a guide and shouldn’t be the ultimate level of reference. At Complement Warehouse, we pride ourselves on presenting essentially the most current and precise product particulars. Nevertheless, as a end result of dynamic nature of product formulations, we can’t assert with certainty that our descriptions and pictures mirror the most recent product model. For the most accurate info, we advocate consulting the product’s producer directly through their official web site. The views and information attributed right here do not necessarily align with our own; they’re curated directly from the insights offered by the producers. With the right plan and the best discipline, you can get seriously shredded in simply 28 days.
It is conceivable the mixture of flavonols and phytochemicals present in pure cocoa may have a different effect on skeletal muscle adaptation to train. One Other aspect of (–)-epicatechin supplementation worthy of additional examine is the timing and length of supplementation. As An Alternative of continual supplementation, it may show helpful to examine the use of (–)-epicatechin when supplemented immediately prior to train. Studies have proven (–)-epicatechin will increase blood flow by way of vasodilation by means of nitric oxide production (3). Lastly, the potential inhibition of aerobic variations in skeletal muscle on account of the antioxidant properties of (–)-epicatechin need to be instantly examined.
Therefore how some myostatin inhibor supplements are receiving poor evaluations online with clients complaining that they didn’t notice a factor. Now, to turn out to be top-of-the-line bodybuilders on the earth like Flex, you’ve received to have past exceptional genetics, use anabolic steroids and practice exhausting in the gym for a very very lengthy time. In my opinion, the gathering of blood samples only on days 14 and 28 ought to be clearly said as a limitation of the manuscript. Standardize the writing of the names of study phases throughout the manuscript – typically capitals are used as a primary letter of the name of the phases, and in the different components of the manuscript lowercase is used.
This disparity in MSTN availability could contribute to a shift in potency between species. A pharmacokinetic examine with MYO-029 discovered that the focus of MYO-029 required to elicit a 50% enchancment in muscle mass in monkeys was 18 times greater compared to the same enchancment in mice [107]. This discrepancy in pharmacokinetics and MSTN serum focus between diseased human and mouse models might considerably contribute to the distinction in outcomes between medical and animal trials. Inhibiting extra ligands that signal through the first myostatin receptor may shield towards muscle loss. Myostatin is known to sign through transmembrane activin Sort IIB receptors (ActRIIB) together with Activin A and different ActRIIB ligands28,34.
Astragalus polysaccharide (APS; also called Huang Qi) is a properly known extract of Astragalus membranaceus (Fisch.) Bge (AMB) (Fu et al., 2013). Like other members of the pro-TGF-β superfamily, pro-MSTN is a homodimer comprised of two identical disulfide-linked subunits. Each chain consists of 109 amino acid residues containing a pro-domain (N-terminal) and a smaller development issue (GF) area (C-terminal). As present in other members of the TGF-β superfamily, the GF domain of MSTN accommodates a cystine-knot motif and four antiparallel β-strands known as «fingers». The two similar GF domains of MSTN are connected by their concave «palms», that are covalently linked to every other by disulfide bonds between C339 residues in the wrist region.
The pro-domain accommodates N-terminal «forearm» helices, which grasp mature GF, and a globular «arm/shoulder» domain, which sits on top of the mature GF protomers (Cotton et al., 2018). Every MSTN monomer has 4 intermolecular disulfide bonds, three of that are involved in cysteine knot formation. When the two monomers of MSTN come collectively in an antiparallel course they generate convex or concave surfaces. However, later x-ray structural analysis demonstrated that it’s a member of the TGF-β superfamily, though it exhibits outstanding variations within the N-terminal region and within the area previous the wrist helix (Cotton et al., 2018). GH-mediated conversion of thyroid hormone (TH) thyroxine (T4) to triiodothyronine (T3) helps their distribution to different tissues by way of binding to thyroxine-binding globulin, albumin, or transthyretin (TTR) (Alshehri et al., 2015). TTR-based T4 distribution was found to advertise myoblast differentiation by regulating the expressions of myosin gentle chain 2 (MYL2) and the calcium channel genes Cav1.1 and Cav3.1 (Lee et al., 2013). We recently reported that in myoblast differentiation, TTR maintains muscle homeostasis through the distinctive TH shuttle mechanism.
Myostatin has been shown to be expressed by a number of tumor cell strains in mice and man. Unbound has launched with six cutting-edge dietary supplements, manufactured in one of the world’s most trusted amenities at NutraBio HQ. This beast of a complement utilizes a full scientific 750mg yield dose of phosphatidic acid, an ingredient we’ve lengthy loved — after we can find it.
Its results are influenced by complicated mechanisms together with transcriptional and epigenetic regulation and modulation by extracellular binding proteins. Due to its actions in promoting muscle atrophy and cachexia, myostatin has been investigated as a promising therapeutic target to counteract muscle mass loss in experimental fashions and sufferers affected by different muscle-wasting conditions. Moreover, growing proof signifies that myostatin, past to control skeletal muscle development, may have a task in many physiologic and pathologic processes, corresponding to obesity, insulin resistance, cardiovascular and continual kidney disease.
Myostatin negatively regulates protein synthesis through the Akt pathway by inhibiting Akt/p70s6k activation30 and signaling31. Myostatin will increase protein degradation by way of activation of the ubiquitin–proteasome system10 and is mediated by way of elevated expression of the ubiquitin e3 ligases Atrogin-1 and MuRF-131,32,33. Therapies focusing on the myostatin pathway thus hold promise to mitigate muscle atrophy that accompanies illness and disuse34,35.
In the hunt for enhanced muscle progress and athletic efficiency, myostatin inhibiting components are essential. Myostatin is a protein recognized for limiting muscle progress, and inhibiting its activity can significantly enhance muscle mass and strength. Sotatercept (ACE-011), developed by Acceleron Pharma to deal with osteoporosis, is a fusion protein during which the extracellular domain of ACVR2A is linked to a human IgG Fc domain. Notably, biweekly subcutaneous injection of ACE-011 (10 mg/kg) for three months led to important increases in bone volume (93%) and bone formation price (166%) in cynomolgus monkeys [55]. A substantial enhance in BsALP levels and improvement in BMD have been additionally detected in a number of myeloma patients who received 4 monthly doses of ACE-011 [57], indicating ACE-011 as a probably effective therapy in bone-loss disorders.
As time evolves, medical research will hopefully verify the putative advantages of epicatechin for active individuals. Curiously, research that found a significant interaction between the energetic therapy and myostatin ranges have been investigating epicatechin-enriched green tea extracts. Such findings point out that green tea catechins work synergistically to enhance skeletal muscle adaptation. In conclusion, the article additionally highlighted studies on varied other supplements, including brown seaweed, spirulina, cocoa, epicatechin, and Vitamin D. Nevertheless, the findings had been largely inconclusive.
When activated, MSCs bear asymmetric division throughout muscle regeneration to give rise to two self-renewal daughter cells or emerge to form non-committed stem cells (Myf5-) for self-renewal or committed (Myf5+) cells (Kuang et al., 2008). The up-regulation of MyoD expression in activated MSCs (Pax7+/Myf5+) causes them to proliferate to generate myoblasts (Shefer et al., 2006). On the opposite hand, a decline in Pax7 expression in MyoD primed myoblasts marks their withdrawal from the cell cycle and entry into differentiation (Zammit et al., 2004). Collectively, the transcriptional community regulates the development of the MSC lineage from origin to myogenic specification, differentiation, and fusion to produce myoblasts. This variability factors to an intricate interaction between myostatin and other regulatory systems within the physique, influenced by particular person genetics, the sort of inhibitor used, and life-style elements similar to food plan and train. AlphaBuild by Olympus Labs focuses on supporting complete muscle progress by way of enhanced synthesis and recovery processes. Ecklonia Cava is a sort of brown algae that is high in antioxidants and has been shown to inhibit myostatin.
When choosing an antidepressant, your healthcare professional considers your signs, any well being points you have, different medicines you take and what has worked for you in the past. However stopping antidepressant therapy suddenly or missing several doses may trigger some signs. Hold in mind that melancholy that is not treated is a more concerning danger factor for suicide. And antidepressants could reduce suicide threat in the long run by bettering mood for many people. The authors of this text will make the uncooked knowledge supporting their conclusions obtainable, without any hesitation or reservation.
Apparently, MSTN protein levels were considerably lower in Ac-MIF2-NH2-injected muscular tissues (Figure 6C), and ACVRIIB protein ranges had been lower in Ac-MIF2-NH2-injected muscle tissue (Supplementary Determine S8). In addition, muscle fiber widths were considerably greater in Ac-MIF1-treated muscles than only CTX-injected muscular tissues (Figure 6D). Taken together, Ac-MIF1 and Ac-MIF2-NH2 stimulate muscle regeneration in injured muscle tissue.
In vitro research have shown that like FST, FLRG binds to activin and BMPs to inhibit their biological actions (Tsuchida et al., 2001). Furthermore, endogenous latent MSTN advanced largely circulates in association with propeptide and FLRG, which both act independently as unfavorable regulators of MSTN, in all probability by preventing MSTN binding to its receptor (Thies et al., 2001). Stories suggest that FLRG potently inhibits MSTN exercise in a concentration-dependent method (Hill et al., 2002). In healthy older males, lower serum MSTN ranges have been linked to lower SM mass, but not in women (Peng et al., 2018). It can be evident that serum MSTN doesn’t differ in younger and sarcopenic elderly males (Ratkevicius et al., 2011).
Topics were requested to maintain their normal diet throughout the research and were not allowed to ingest any dietary complement that contained doubtlessly ergogenic nutrients. Nevertheless, topics had been permitted to ingest energy-based sports drinks, vitality bars, and protein powders provided that they didn’t contain any ergogenic vitamins. The purpose for this was that many resistance-trained athletes ingest these energy-based supplements as a method to take care of their beneficial dietary intake of calories.
Feel free to visit my web-site http://sujongsa.net/bbs/board.php?bo_table=free&wr_id=1345619
Bags Under Eyes: How To Get Rid Of Eye Bags
Eye bags are a common issue that can make you look tired and aged. While they can be caused by various factors, there are effective ways to reduce them. Here’s how:
Stay hydrated and sleep well.
Avoid smoking and secondhand smoke.
Use sunscreen and protective gear outdoors.
Eat a balanced diet rich in vitamins A, C, and E.
Exercise regularly to reduce fluid retention.
Consider cool compresses or eye masks during rest.
Blink frequently to keep the eyes lubricated.
Try natural remedies like cucumber slices or tea bags over the eyes.
If persistent, consult a healthcare professional for potential treatments.
*Results may vary and should be discussed with a medical professional if persistent.*
Bags Under Eyes: How To Get Rid Of Eye Bags
What are bags under the eyes?
Bags under the eyes, also known as «eye bags» or «cortical hyperemia,» are the visible puffiness beneath the eyes. This occurs due to fluid retention in the tissues around the eyes. It can be caused by aging, lack of sleep, dehydration, or underlying health issues like allergies or thyroid problems.
What causes bags under the eyes?
The primary causes of eye bags include:
Aging: The skin loses elasticity, and fat accumulates in specific areas, including under the eyes.
Inadequate sleep: Sleep deprivation can lead to fluid retention and dark circles.
Dehydration: Lack of water can cause puffiness and dark circles.
Allergies or sinus issues: Can result in puffiness due to inflammation.
Medical conditions: Thyroid problems, anemia, or other systemic health issues may contribute.
How to get rid of bags under your eyes
There are several ways to reduce the appearance of eye bags:
Lifestyle Changes
Stay hydrated: Drink plenty of water to prevent fluid retention.
Get adequate sleep: Aim for 7-9 hours of quality sleep each night.
Use cold compresses: Applying a cool cloth or ice pack can reduce puffiness temporarily.
Home Remedies
Eye masks: Using cooling eye masks can provide sustained relief and reduce puffiness.
Tea bag compresses: Applying warm tea bags to the eyes can help with circulation and reduce swelling.
Surgical Options
For more persistent or severe cases, surgical procedures like:
Blepharoplasty: Removes excess skin or fat around the eyes for a more defined look.
Fat removal surgery: Reduces the accumulation of fat causing puffiness.
Muscle tightening: To address drooping eyelids and reduce eye bag appearance.
Surgical options may involve risks, so it’s essential to consult with a qualified plastic surgeon before considering these procedures.
FAQs
Are bags under the eyes permanent?
The appearance of eye bags can be influenced by lifestyle factors and medical conditions. While some causes are controllable, others may have genetic components that cannot be altered.
Can you go blind from eye bags?
No, eye bags themselves do not cause blindness or vision loss. However, underlying health issues like infections or severe allergies might lead to more serious conditions requiring medical attention.
How long does it take for eye bags to go away?
The duration depends on the cause. While some cases can be resolved with lifestyle changes in a few days, others may require weeks or months, especially if related to aging or genetics.
Here is my blog post can you drink while taking steroids (https://beaunex.net/bbs/board.php?bo_table=free&wr_id=544885)
All of the sets prior to that may build up are to pump more blood into the muscle and construct up to that ultimate set where you’ll go all-out. Although many people choose consuming egg whites, some research suggests that consuming entire eggs is more useful for muscle development. But you need to be consistent with coaching, correct nutrition, and sufficient rest. Due To This Fact, the right method to gain muscle isn’t just about lifting heavy. The main steps in understanding how to gain muscle mass lie in consistency, correct vitamin, and restoration.
‘This sort of protein powder makes it easier to eat energy on a consistent foundation compared to having to devour those energy from complete foods,’ Fleming adds. Now as for what quantity of drop sets to do to build muscle quick, one examine replaced three regular sets with 1 regular set adopted by 2 drop sets. However for now, this is an instance of what this might seem like with a 3-day per week full body exercise that might practice every muscle with round 6 units per week. Now, the final research I want to have a look at before offering some recommendations for the least variety of sets you can do to construct muscle quick is a meta-analysis led by Brad Schoenfeld. The first technique that’ll allow you to build muscle quick in less time has to do along with your exercise volume. It is really helpful that you simply focus on slowly increasing your weights to not more than 10% each week so the body can adapt. This also can assist cut back your risk of damage or overtraining.
Nevertheless, in girls, the association between complete protein intake and muscle mass relied on bodily activity. Specifically, to achieve muscle, you have to eat extra protein than your body breaks down by way of natural processes. When used alongside resistance coaching, creatine may have favorable results on bone density.
Speed of metabolic absorption additionally affects the carbohydrates of alternative in a mass gainer. Broadly, we sorted merchandise into two camps based on the design philosophy of the mass gainer. The carbohydrates included are particularly engineered to be quickly absorbed, which will get you an insulin spike for constructing muscle, but could also precipitate metabolic dysfunction if used for too long. It’s a little excessive in artificial flavors and a little low in nutritional vitamins and minerals to end up any greater within the rankings. Combat XL from MusclePharm goes pretty heavy on the carbs, with over two-thirds of its weight coming straight from carbohydrates. BCAAs are critically important for muscle growth and make up around 35% of the amino acids in your muscular tissues.
«If you have problems placing on muscle, your physique truly needs extra time to recuperate than somebody who puts on muscle very simply,» he says. 4 days within the health club with three days of rest might simply do the trick. Analysis suggests that these coaching to realize muscle ought to eat 1.4–2 grams of protein per kg of body weight per day. To construct new muscle tissue, your primary instruments for increasing your body’s rate of protein synthesis are performing resistance coaching and getting adequate quantities of protein and general vitamins. This course of of increasing your muscle mass is identified as muscle hypertrophy, and it’s a primary objective of resistance training. Added muscle mass will increase the definition of your muscular tissues, improve your lean physique mass, and add bulk and measurement to your frame in all the best places. In Accordance to science, it appears women and men have a reasonably related response to resistance coaching.
For the experienced athlete who has mastered previous cycles and calls for absolutely the pinnacle of efficiency enhancement, Monster Plexx stands alone as the final word anabolic catalyst. Balancing your protein, carbs, and fats may also assist maintain your metabolism up in response to your intense coaching. If you had been to eat this quantity of daily food and not exercise hard, you will surely run the chance of gaining fats from the general calorie consumption. When designing a high-protein meal plan for muscle growth, contemplate your dietary preferences and restrictions. For instance, somebody following a plant-based food plan will need to rigorously plan their meals to ensure they’re hitting their every day protein goals. Protein powders, like whey protein and pea protein, are among the many hottest muscle-building dietary supplements. You can add these protein-rich powders to smoothies and protein shakes and enjoy them before or after a exercise to maximize muscle progress and restoration.
Analysis claims that when you’re training for strength you need your rest periods between 3-5 minutes between units, however shortening your relaxation durations to seconds is more practical for muscle dimension (18). Low quantity coaching is great for building muscle when you start out. However, as quickly as you’re a complicated lifter, increasing your volume is imperative to get previous any plateaus.
When it involves weight lifting frequency, more just isn’t all the time higher. Coaching the identical muscles daily and even twice a day has not been shown to lead to extra muscle features general, especially in newbies (39). How rapidly you probably can build mass is extra dependent on how quickly you can get well — since MPS occurs after coaching. Compound lifts are multi-joint movements that have interaction a couple of massive muscle group at a time.
For hypertrophy, working multiple muscle teams directly could promote uniform progress. For power, working multiple groups without delay can improve total energy. To be efficient, the intensity you choose needs to be enough to generate stress while permitting you to do sufficient reps to succeed in fatigue. Acute training variables are the basic parts of any coaching program, in accordance with the NAMS. The authors discovered that when the total quantity is high, you might expertise extra power than hypertrophy features. However, hypertrophy features occur regardless of whether or not the quantity load is low or excessive. Resistance training offers many well being benefits apart from getting stronger.
You should be aiming to add mass throughout; due to this fact, you want a workout plan that stimulates all of the muscle tissue of the body. Purely specializing in smaller muscle groups, such because the arms and shoulders, will result in an imbalanced physique in addition to hinder total mass gains. When you have plenty of excess glucose in your system, and your muscular glycogen stores are topped off, the excess glucose gets pulled into your fat cells. The supply of protein in your mass gainer may have some effect on the rate at which you acquire mass. Protein derived from whey is metabolized faster, and could additionally be slightly simpler at adding muscle mass, in comparability with soy protein (2). A mass gainer with a comparatively high fat content is particularly engaging because of the caloric content material of fat.
Nevertheless, your training ought to include compound and isolation movementsfor one of the best long-term health outcomes. You ought to rarely have more than «two reps in the tank» by the tip of a set in case your goal is constructing muscle. To put it merely, relying on your measurement, your muscles could grow extra with decrease reps utilizing heavy weights or with high reps utilizing lighter weights.
Contemplate including MyProtein mass gainer in your food regimen for a small increase when you discover it difficult to gain weight or if you practise veganism/have a dietary restriction. Plus, because it’s plant-based, those who are vulnerable to acne will discover this appropriate for them as well. You’ll find this mass gainer contributes to your mass-gaining journey. Since the serving measurement is humongous, some people who use this have taken to proportioning the servings to suit their food regimen, especially if they’re getting enough nutrients from their food consumption. This program is designed to construct muscle and strength, so ideally, you will be in a caloric surplus.
You need all macronutrients in your food plan when you really need to acquire muscle mass and increase your metabolism. These nutrients present your muscular tissues with the ability to recuperate and develop new muscle tissue. You will only have one compound train for each exercise, which is the one you’ll start with. You’ll at all times end with an isolation exercise (some exercises you might have extra isolation exercises). Nevertheless, there’s a specific time the place you’ll drastically improve the depth. This will be towards the top of your workout and normally on the ultimate set.
When it involves gaining weight, the quantity of meals you eat is an important thing to consider. Eating extra energy than you burn will result in weight achieve. But the type of weight you gain—muscle vs. fat—can be closely influenced by the quality of your calories. Over time you will need to increase the stimulus by the number of reps, quantity of weight, or a decrease in rest time.
In Accordance to analysis, resistance training locations your muscle tissue under sufficient rigidity and performs a crucial role in muscle development (1). Mass Gainers do not include any dangerous components, so there’s nothing to fret about there. As nicely as various bodily circumference measurements like your arms, chest, shoulders, and legs, for example. Ideally, your power and these bodily measurements should be progressively rising alongside together with your physique weight.
‘Basically the alternative of what you’d advise for weight reduction,’ provides Lennon. Like maintaining a constructive mindset, setting goals is like having a roadmap to Gainsville. Goals offer you path; every achievement on the means in which is like a checkpoint, maintaining you on monitor. First off, consider utilizing proper form as your insurance coverage. Strength coaching is a really protected type of exercise, but sloppy form can nonetheless result in strains, sprains, or much more extreme accidents. In addition, your exercise log enables you to rejoice those small wins – like adding five extra kilos to your carry or squeezing out an extra rep. These victories add up and maintain you hungry for more.
Packing a hefty 962 kcal per 256g serving, this Total Mass Matrix Extreme mass gainer from Protein Works is right for hitting formidable every day calorie targets. However if there are any workouts you can’t find yourself super-setting or would just choose to not and you’d nonetheless like to construct muscle quick, this is the place the next method can come in handy. As for what this may look like, at the finish of the article, I’ll provide you with guys some free time-saving workout routines that care for all the sets, reps, and workouts for you. But 4-7 sets per muscle per week is probably going the candy spot to get essentially the most positive aspects with the least quantity of time and effort. Now what they discovered is a dose response between muscle development and the number of sets performed, with 10+ units per muscle per week resulting in probably the most development.
Beta-alanine is an amino acid that is thought to serve as a PH buffer by serving to you produce more carnosine and serving to to stop acid build-up that always leads to loss of energy and stamina. Some limited research means that taking beta-alanine earlier than lifting would possibly assist you to get a couple of more reps in and potentially enhance your endurance and efficiency throughout coaching (85). Taking casein at evening before bed is believed to assist this mechanism all through the night time by supplying long-lasting protein for MPS and a few research does assist this theory (78,79). It has additionally lengthy been used as a restoration protein for athletes in meals like low-fat dairy.
Combining it with rice or pasta is the right post-workout meal to match your weight acquire targets. When your mind is cheering you on, your physique is more prone to follow suit. While not essential for building muscle, carbohydrates can be helpful after training. During a workout, your body faucets into the carb reserves for vitality, depleting them. Post-workout carbs assist replenish these stores, giving you the energy for your next epic workout and helping with muscle recovery. Complete proteins containing all essential amino acids are your best wager.
There are 10 acute training variables, however there are 5 key variables to consider for hypertrophy and strength. For instance, the authors note that coaching only one leg for a period of time could result in increased power within the other, whereas hypertrophy solely occurs within the educated leg. A 2018 review found that power training might have more general benefits as a outcome of position of the central nervous system and how this affects the entire body. Limited analysis focuses on the advantages of choosing one specific sort of resistance coaching instead of the other. Training for hypertrophy means you’re trying to increase the physical measurement of your muscular tissues. This is a measure of how rapidly the carbohydrates are absorbed into your physique and became sugar in your bloodstream. A rush of sugar after a big meal just isn’t healthy; over time it could trigger metabolic syndrome and ultimately even kind two diabetes.
Mass gainers are created to supplement one’s diet and enable the user to absorb extra calories without needing to eat so many meals a day, which can be vomit-inducing. This again exercise for mass gains have you sticking with basic exercises. Like the chest exercise above, you’ll begin with heavy compound workout routines.
References:
best Steroid cycle for cutting, http://www.radioavang.org/human-growth-hormone-and-exercise-why-is-training-so-important/,
After the loading part is over, you’ll switch to a maintenance dose of 2-10 grams per day. Although some analysis means that it may find a way to enter cells more quickly, we nonetheless want more analysis to suggest earlier than considering it a more effective, superior supplement. An overwhelming number of scientific studies support the effectiveness of creatine monohydrate. In short, creatine monohydrate is taken into account the unique creatine that athletes have been using for years. Supplemental creatine could enhance muscle satellite cell cells and subsequent muscle hypertrophy Muscle Satellite cells are a special type of stem cell that, when stimulated, can facilitate muscle restore and ultimately turn out to be new muscle cell nuclei (myonuclei). For sixteen weeks, 24 male soccer gamers had been cut up into two groups and given both 750mg of Kre-Alkalyn or 750 mg of creatine monohydrate per day. The group was break up into two different weight teams, one was given 1.5g of creatine Kre-Alkalyn, and another was given 1.5g of monohydrate creatine every for six days.
Hellem et al. (2015) studied the results of supplementation of 5 g of creatine per day used as monotherapy (i.e., with out concomitant antidepressants) on depressive signs over 8 weeks in persons with methamphetamine dependence. In this open-label trial involving 14 topics, the authors discovered that HAM-D scores were considerably decreased by as soon as 2 weeks after the beginning of creatine supplementation. They additionally found that Beck Nervousness Stock scores have been considerably reduced, and that brain [PCr], measured by 31P MRS, had been significantly increased after 8 weeks. Brain [PCr] were higher at the second 31P MRS scan in comparability with baseline, suggesting that creatine supplementation elevated [PCr] [193]. Studies have proven reduced [tCr] in MDD in the left dorsolateral prefrontal cortex (PFC) [125], posterior cingulate cortex (PCC) [126], and left hippocampus (HC) [127]. A examine in of geriatric melancholy discovered reduced [tCr] in the PFC in persons with remitted depression compared to wholesome controls [128].
Regardless Of ATP being used at high rates, the lower in ATP levels throughout resistance training is often small or statistically insignificant. A Quantity Of research have proven this, suggesting that ATP is being almost totally regenerated throughout exercise. In turn, we probably don’t have to rest a lot in order to replenish our ATP shops. Studies have shown creatine monohydrate successfully will increase lean muscle mass, improving overall performance. It also reduces muscle fatigue, allowing you to perform more repetitions with weight. A double-blind placebo controlled study conducted at The Ohio State University and printed within the Journal Of Energy And Conditioning evaluated a one rep max on bench press after 10 days of creatine supplementiation. The study found that creatine monohydrate and creatine magnesium chelate demonstrated related performance outcomes, with no difference demonstrated between either [R].
This extra creatine permits your muscles to retailer more vitality, providing you with a more durable workout but with sooner restoration. MyHC isoforms were quantified after electrophoresis in a sodium dodecyl sulfate-polyacrylamide gel (SDS-PAGE) [46,47]. Frozen samples have been mechanically homogenized in a protein extraction resolution containing a 50 mM phosphate potassium lysis buffer zero.5 mL/50 mg tissue. The complete protein quantification was performed in supernatant aliquots by the Bradford methodology. Small volumes of the diluted extracts (10 μL) were loaded onto a 7–10% SDS-PAGE separating gel with a 4% stacking gel, which was run in a single day (27 h) at 70 V and stained with Coomassie blue R (Sigma-Aldrich®, St. Louis, MO, USA). MyHC isoforms have been quantified by densitometry and recognized based mostly on predominant fiber varieties in studied muscle tissue samples, as reported beforehand [48,49,50].
Athletes need training on supplement advantages and risks, customized diet counseling, and evidence-based hydration strategies to optimize performance and recovery while making certain safety. When tailoring your supplement technique, it’s important to think about the nutritional data of every product. Creatine, whether in the type of monohydrate or phosphate, presents distinct advantages that may be aligned along with your health objectives and dietary wants. This consists of a creatine molecule linked to orotic acid, a precursor for nucleic acids (the parts of DNA and RNA molecules which are present in genes), which aid in the functioning of the cells and in the utilisation of vitality. It is basically creatine monohydrate, but micronised, which suggests the creatine molecules have been divided or minimize, rising the floor space by about 20 instances. Every molecule is 88% creatine and 12% water, which means 1 gram of creatine monohydrate provides 880 mg of creatine. Effervescent Creatine This form of creatine is solely creatine monohydrate mixed with sodium and sugar within the form of a powdered drink combine.
Walzel et al. noticed that there could also be an existence of not only cytosolic, but in addition a mitochondrial creatine pool, via the observance of CreaT isoforms within the mitochondria [8]. These researchers concluded that the mitochondria «could symbolize a serious compartment of creatine transporter localization, thus providing a new aspect to the present debate in regards to the existence and whereabouts of intracellular creatine and PCr compartments.» To keep away from most unwanted aspect effects, take creatine monohydrate with meals and break up the gram day by day dose into a number of smaller ones during a loading part, or skip the loading section altogether and persist with 3-5 grams every day. Supplementing creatine in general will increase the shop of ATP (adenosine triphosphate) in your muscle cells, and that leads to improve stamina to lift extra weights and do extra reps. There are literally several forms of creatine past just creatine hcl vs monohydrate.
Although this type of creatine supplementation is extra water soluble, it is not considered better absorbed. Researchers concluded that three grams of creatine HCL didn’t lead to improved efficiency or hormonal modifications compared to creatine monohydrate. Creatine HCL, also referred to as creatine hydrochloride, is amongst the newer forms of creatine available on the market. It is about 72% creatine by weight and exists as a creatine molecule sure with hydrochloric acid. Given the comparatively low threat of supplementation, we feel it’s cheap to take creatine for a possible modest benefit in efficiency in most circumstances. Individuals with existing kidney illness, who’re pregnant or breastfeeding, or who have adverse reactions to creatine mustn’t use supplemental creatine offered.
There is a constructive relationship between muscle creatine uptake and exercise efficiency [17]. Volek et al [18] noticed a significant increase in power performance after 12 weeks creatine supplementation with a concurrent periodized heavy resistance coaching protocol. The creatine supplementation protocol consisted of a weeklong loading interval of 25 g/d adopted by a 5 g maintenance dose for the remainder of the training. One Other group ingested 4 × 5 g of CM for 5 days as a non-blinded benchmark control. This analysis allowed for a comparability of ingesting recommended doses of liquid creatine to a placebo, as properly as seven occasions the quantity recommended by the producer that might purportedly provide an equal quantity of CM. The researchers found that CM supplementation significantly elevated muscle free creatine content material by 31 ± 28%. Nevertheless, none of the other teams skilled any effect on muscle free creatine, phosphocreatine, or total creatine content material.
We hypothesized that a combination of creatine monohydrate supplementation and resistance training might attenuate myostatin expression and modulate downstream targets, selling more accentuated modifications in white gastrocnemius than within the soleus muscle. Mixtures between exercise training and creatine interventions resulted in higher lean mass and lower muscle protein catabolism [10,11]. One Other potential impact of creatine supplementation is the adaptive modulation of myosin heavy chain (MyHC) isoforms in skeletal muscle fibers [12,13,14,15,16]. MyHC isoform profiles decide the muscle fiber phenotype; in general, predominantly MyHC I fibers have greater slow twitch-oxidative characteristics, while fibers containing more MyHC II largely have a fast glycolytic metabolism [17,18]. Skeletal muscles have a various proportion and distribution of highly adaptable fiber types in order that phenotypical aspects could be affected by several molecular signaling pathways, which regulate protein synthesis and myogenic exercise [19,20]. Individual differences between creatine supplementation and (A) baseline and (B) placebo situation.
Thus, there may be proof that creatine supplementation could assist psychological health. Creatine has become one of the most well-liked dietary supplements in the sports nutrition market. The type of creatine that has been most extensively studied and commonly utilized in dietary supplements is creatine monohydrate (CM). A variety of potential therapeutic advantages have also been advised in numerous scientific populations. Research have indicated that CM is not degraded throughout regular digestion and that simply about 99% of orally ingested CM is both taken up by muscle or excreted in urine. Additional, no medically significant side effects have been reported in literature. However, supplement producers have frequently introduced newer types of creatine into the market.
Imply differences between situations together with the 95% CI are displayed in Determine four. Capillary blood samples had been taken from the left earlobe twice during the resting period, after the warm-up, immediately after the sprint, and then each minute for 8 min after the 15-s cycle sprint. For the willpower of lactate focus, capillary blood samples (20 μL) had been collected from the earlobe into an end-to-end capillary (20 μL, EKF Diagnostic). Instantly after assortment, the stuffed capillary was mixed with a hemolyzing answer. Blood lactate concentrations had been measured amperometric-enzymatically utilizing the Biosen C-Line (EKF Diagnostics). The all-out cycle dash was performed in a seated position utilizing the massive chainring (if applicable) of the participant’s bike and the 15-tooth cog of the ergometer. The recording of the test began once the cadence exceeded 30 RPM as per ergometer settings.
Creatine generates adenosine triphosphate (ATP) to keep up a relentless provide of power during exercise, to maintain up with the manufacturing of your working muscle tissue. Thanks to its capacity to ramp up your ATP manufacturing in moments of need, creatine supplementation has been shown to enhance muscle energy and enhance lean muscle mass, says Bogden. In fact, one 2021 evaluation printed in Nutrients found that those that supplemented with creatine skilled larger increases in relative muscle power during lifts than those that didn’t complement. During coaching and exercise, increased available vitality can also translate to increased explosivity throughout movements such as plyometrics and Olympic lifts, based on Bogden. Though creatine has been largely studied as an ergogenic help for exercise, coaching, and sport, several well being and potential therapeutic advantages have been reported. This is as a end result of creatine plays a critical role in mobile metabolism, significantly during metabolically confused states, and limitations within the ability to move and/or store creatine can impair metabolism. Furthermore, growing availability of creatine in tissue may improve cellular metabolism and thereby reduce the severity of damage and/or disease circumstances, notably when oxygen availability is compromised.
According to the Journal of the International Society of Sports Activities Nutrition, two research had been conducted to evaluate the security and exercise performance benefits of creatine nitrate (CrN) supplementation in comparison to creatine monohydrate (CrM) and a placebo. In the early Nineteen Nineties, EAS launched its original model of creatine monohydrate and thus sparked the first nice revolution into the sports activities vitamin market. Since the discharge of Phosphagen, Hi-Tech has labored diligently to develop a creatine product that might characterize the same quantum leap in dietary expertise and consumer worth that EAS’ Phosphagen did. Hi-Tech understood that to reach this mission, it will need to design a complicated creatine product that considerably advanced the muscle-building potential of the original Phosphagen. Moreover, Hi-Tech realized that the profitable design of such a complicated creatine product may take a decade or more of both in-house and independent research and experimentation. The aim of this research was to gauge the effects of creatine monohydrate supplementation on morphology, MyHC isoform expression, and myostatin pathway signaling in gastrocnemius (white portion) and the soleus muscle tissue of rats submitted to resistance training. Since the gastrocnemius muscle superficial area (white portion) is characterised by the predominance of fast-twitch fibers, while the soleus is a classical slow-twitch muscle, these muscles have been used on this examine.
Moreover, utilizing a special dosage of creatine monohydrate or altering the intake protocol may influence the outcomes. Particularly, a protocol with no loading phase but with consistent creatine supplementation over an prolonged period might lead to totally different outcomes, notably in terms of modifications in FFM and lactate distribution house. Creatine supplementation could affect capillary blood lactate accumulation throughout a 15-s all-out cycle sprint by growing phosphagen power contribution. Furthermore, variations in capillary blood lactate concentrations could be linked to an expanded lactate distribution area, although these effects are doubtless minimal.
The authors also mentioned that it’s more than likely that intracellular creatine somewhat than PCr focus that determines the regulation of creatine uptake and CreaT exercise and expression. It is believable that as free intracellular creatine content material increases, AMP-activated protein kinase (AMPK) will «initiate a signaling pathway resulting in alterations in gene expression.» Though similar in energy, power and muscle mass improvements, Kre-Alkalyn is superior to creatine monohydrate with improvements in endurance, VO2 max, and exhibiting higher bioavailability. Time accelerated testing on pH stability reveals that Kre-Alkalyn does not degrade to creatinine as in comparability with creatine monohydrate.
MyHC I and MyHC IIa isoforms had been observed within the soleus muscle, and MyHC IIx and MyHC IIb isoforms have been discovered within the gastrocnemius white portion. The relative amount was expressed as a percentage of the entire MyHC expression. We had been unable to randomize placebo and creatine circumstances caused by the comparatively lengthy washout interval of creatine [33].
Allen et al. [18] evaluated the impact of creatine supplementation on depression-like habits, measured through the compelled swim take a look at (FST), in rats. In their research, the wire suspension take a look at (WST) was used to control for motor capacity. In one experiment, 30 feminine rats got either no creatine, 2% creatine by weight, or 4% creatine by weight. In another experiment, 36 male rats were uncovered to the same dietary protocols and behavioral tests.
Giulia aims to translate evidence-based science to the public by way of educating and writing content. She has labored 4+ years in medical settings and has additionally revealed articles in academic journals. She is into operating, swimming and weight lifting, and enjoys spending time within the mountains (she has a delicate spot for hiking and snowboarding within the Italian Dolomites). Sure, the 2 creatine varieties work similarly when taken at doses of three to 5 grams every day, and you’ll switch from one type to the other at any time. A 161-gram container (32 five-gram doses) of PEScience’s TruCreatine prices $19.99.
Breaking down PCr into Pi and Cr with the enzyme CK yields about 10.3 kcals of free power that can be utilized to resynthesize ADP -+ Pi into ATP [38,39,56,57]. Creapure creatine monohydrate presents a quantity of benefits like improved energy, lean muscle mass, & enhanced recovery. It’s also known for its purity and for being the creatine efficiently utilized in most sports science studies. Sure, it’s renowned for enhancing strength, selling lean muscle mass, and speeding up muscle recovery. Both types of creatine have been studied for his or her impact on muscle creatine content material, with research displaying that they’ll promote vital modifications in muscle creatine levels. Additionally, resistance training promoted intensive interstitial reworking in both skeletal muscle types.
Moreover, creatine and CK, which had been very low in sarcoma tissue, were considerably elevated with the concomitant regression of tumor cells. Moreover, the energy-shuttling perform of creatine goes past regulating CD8 T cells, in that reduced vitality capacity has also been reported in a quantity of immune cells in varied mouse tumor fashions in creatine transporter knockout mice [17]. The researchers concluded that creatine is an important metabolic regulator controlling antitumor T cell immunity and that creatine supplementation might improve T cell–based most cancers immunotherapies [17]. Collectively, these findings indicate that creatine supplementation might have anticancer properties. Thus, it can be reasonably concluded primarily based on obtainable evidence that creatine is an important vitality supply for immune cells, might help help a healthy immune system, and may have some anticancer properties. Animal research clearly indicate the important role of creatine, phosphocreatine, and the creatine kinase system within the regulation of habits and in brain growth [16,17], and have offered compelling evidence of the antidepressant impact of creatine.
Creatine is made by the physique, so it could be argued that that supplemental creatine should be presumed secure. Nevertheless, the dietary supplement trade leaves much to be desired when it comes to safety. During high intensity train, the working muscles’ energy (ATP) calls for increase dramatically, as a lot as several hundred-folds greater in comparability with relaxation.
References:
pro bodybuilder steroid cycle (https://bookmark4you.win/story.php?title=1-testosterone-enanthate-a-popular-injectable-steroid-with-a-solid-safety-profile-commonly-used-for-mu)
As you inhale, slowly move the V-handle again to the preliminary position. The most commonly used one for the seated cable row is the V-grip attachment. With the V-grip, you place many of the concentrate on the mid-traps and the rhomboids (the center back). Nevertheless, if you’re attempting to target the out lats and rear delts more, then you’re higher off going with a curved bar and a wider grip. The downside, however, is that as the weights gets heavier, many people find utilizing a supinated grip aggravates the tendons of their elbows and shoulders. They goal the lats and rhomboids specifically, but additionally involve different muscle tissue just like the traps and rear delts.
The seated machine row is a wonderful exercise for strengthening the again muscular tissues. I have found the Seated machine again row to be one of the reliable workout routines for precisely focusing on your back muscular tissues. Experts are going to solely be limited by their imaginations with the virtually infinite variations this train is able to.
In the identical way the incline bench press fits between the bench press and shoulder press, the machine high row lays somewhere in the course of a seated again row and a pull-up. You’re not pulling directly in front of you (horizontal pull) or nor immediately above (vertical pull); rather, you pull down at an angle. This difference in the movement sample will present a little bit of a special stimulus to keep things involved and your muscles skilled. The machine excessive row is a incredible pulling train to coach your back muscle tissue and biceps. As the motion happens at the shoulder and elbow, it’s a compound motion, meaning it’ll train a lot of muscle mass and permit heavy masses.
Ensure that the core is straight, strong and glued in house at all times. It will assist with nearly each exercise that exists and the Cable Row will each take a look at and develop it. Variations like the Single-Arm Cable Row and Standing Rope Cable Row offer various to Cable Rows that forestall muscle imbalances and add core stabilization. Remember to start out the movement by bending these wrists again and bracing your scapula. By avoiding these frequent errors, you probably can make positive that your Seated Cable Row technique is stable, maximizing the benefits of this wonderful cable exercise. Leaning too far forward or backward can throw off your kind and scale back the effectivity of the movement.
To perform a Resistance Band Fly, you will stand along with your ft shoulder-width aside, holding the band in each hand, along with your arms slightly bent. You will then elevate your arms out to the perimeters in a wide arc, maintaining your arms at shoulder peak. This train is nice for strengthening and firming the chest muscle tissue. The point of the train is to intensely work the breadth of the again, not to carry the most weight attainable.
I see too many guys prioritizing weight over type when performing this exercise. These muscular tissues additionally allow lateral flexion, which is the motion pattern that allows you to bend your trunk to the facet. Additionally, they are involved in the rotational actions of the backbone, offering stability and suppleness. When you shrug your shoulders or elevate your arms overhead, that’s your upper traps in motion. When diving into the again muscular tissues, don’t overlook the trapezius muscles, or «traps.» Image them as a diamond draped over your higher again, with higher, center, and decrease parts. The lats – or latissimus dorsi muscle tissue, if we’re getting technical – are the heavy hitters of your back.
This is not essentially better, but some folks prefer cable workout routines over freeweights for this reason. The excellent news is that you can replicate the effect of reverse grip rows with a cable machine. Unlike being on a rowing machine or in a boat—which entails having arms straight out in entrance and pulling in in the course of your chest—upright rows are carried out in a vertical motion. Each seated rows and bent-over rows could be priceless additions to your exercise routine when carried out appropriately. Think About incorporating both workouts into your coaching program to benefit from their unique benefits and to maintain your workouts various and effective. As with any train, prioritize security and proper kind to reduce the risk of damage and maximize your results. Comparable to conventional seated rows, you’ll pause and maintain when the bar is on the top position near your torso.
Evaluate that to a cable row, particularly if performed with an underhand grip, which is going to hit the mid-back, and even low again muscle tissue to the next degree. In this publish, we’ll briefly talk about the seated cable row and how it works, after which what makes for a great various. We’ll list these exercises and tips on how to do every, together with their advantages, variations that influence the muscular tissues they work, and perfect rep ranges to really benefit from these movements. Rows are the final word train for building the higher again, and cable rows are second to none among them. The seated cable row is a stellar train as a outcome of it presents lots of choices in terms of grip and positioning that allow you to hit the back from multiple angles, maximizing muscle recruitment.
Keep your elbows close to your body for optimal latissimus dorsi engagement, and pull your shoulder blades back and down. For instance, you probably can divide your energy training into a workout break up, dedicating totally different days to totally different muscle groups, corresponding to push, pull, legs or chest, back, legs, and arms. If you’re doing one thing just like the latter, Gallucci recommends adding rhomboid exercises to your workout routine by integrating them into their back exercises. «I additionally recommend putting rhomboid workout routines towards the start of your exercise routine. Keep Away From doing them at the end of your workout when fatigue could compromise your technique,» he says. Chest Supported Rows provide a great way to construct higher body strength and muscle mass, while also bettering posture and core power. As there are heaps of variations of this train, let’s now take a glance at a few of the hottest ones.
The erector spinae are essential for various actions and sustaining proper posture. Think About your backbone as the backbone of your back energy, with the erector spinae muscular tissues flanking it like strong, vertical pillars. These main muscular tissues start out of your spine, fan out, and connect to the facet of your higher arm bone (the humerus). The Seated Cable Row is doubtless certainly one of the greatest workouts for power training the back and it ought to completely be included in your routine, however you want to learn to do it right first. If you’ve been mindlessly yanking the cable and questioning why your back isn’t rising like it should, it’s time to rethink your method. Pairing good type with enough relaxation and the best meals is the one real method to each reach your targets, and surpass them.
1) The first thing you’ll must do is regulate the seat height, thigh pads, and chest pad. In comparison with other again exercises such as the Bent Over Row the Cable Row locations much less pressure on the lower again. Sign as a lot as join our newsletter to receive the newest information together with unique reductions. Brett Williams, NASM-CPT, PES, a senior editor at Men’s Health, is an authorized trainer and former pro soccer player and tech reporter. You can discover his work elsewhere at Mashable, Thrillist, and other outlets. To obtain StrengthLog at no cost, use the button in your gadget below.
This variation supplies a continuing pressure all through the motion, serving to to isolate and strengthen the rear deltoids successfully. Standing barbell rear delts row is a free weight train that primarily targets the rear deltoid and center again, and to a lesser degree, it also targets the biceps and traps. There are many ways to do the rear delt row, and you are in a position to do it with dumbbells, a barbell, or a cable machine.
And if you’re looking to improve your other, heavier lifts, then the seated cable row is a terrific supplementary motion to the deadlift and squat. Some folks say that altering your grip on the seated cable row significantly impacts which muscles you train, however this is over-egging the pudding. It likely adjustments which muscular tissues you emphasize to a small degree, however it’s troublesome to say whether or not this has any significant impact on long-term muscle development. As A Outcome Of this muscle strengthens the upper again muscular tissues, it might be a great train to carry out to stop back pain.
You will form your upper back muscles, and even reduce your possibilities of experiencing an injury. No matter which version of the cable row you use, this could at all times be a excessive quantity exercise. Schedule the motion for your higher physique or back-focused exercises. The seated cable row «is probably considered one of the best methods to learn and build throughout back muscle,» says Ebenezer Samuel, C.S.C.S., Males’s Well Being health director. If you’re simply starting out within the fitness center, this transfer helps you understand and prime the proper shoulder blade movement you have to acquire control of your again muscle tissue. If you’re a seasoned vet, the cable row additionally supplies a secure way to stack on heavy weight. The cable shut grip seated row work most of your major again muscular tissues, primarily hitting your latissimus dorsi, trapezius, and posterior deltoids.
Carry Out the seated row with good type for correct muscle activation. Now that you know a couple of variations in your rear delts row, hit the fitness center and verify out every one to get the total effect. Working your delts may be carried out by numerous workouts; we are going to mention a very popular different exercise – that you are able to do alongside or as an alternative of the common rear delt row. Moving your toes away from the anchor point in order that your physique is in a more upright place makes the train easier. To make the train more durable, transfer under the anchor point in order that your higher body is closer to the floor. One Other lower-back friendly different to the seated cable row is the inverted row, which you are capable of do with any suspension coach, be it a TRX, Jungle Gym and even a few gymnastic rings. One of the downsides of the barbell row is that the muscle tissue in your decrease back can end up getting fatigued, especially if you’ve done squats or deadlifts earlier within the workout.
Keep Away From flaring your elbows as it’s going to remove tension out of your lats and put it on different higher back muscular tissues like the traps, rhomboids, and posterior deltoids. The seated cable row is an excellent compound motion for building muscle and energy in your back. It is a beginner-friendly train appropriate for exercisers of various coaching expertise. Bent-over dumbbell rows are a classic back-strengthening move is a rhomboid exercise pick from Gallucci. «A tip for that is to concentrate on pulling via the elbows rather than simply shifting the weights with your arms,» he says. «The rhomboid muscle tissue play a vital function in maintaining proper posture by retracting the shoulder blades towards the backbone.
Start seated in front of a cable machine with knees barely bent in order that they don’t lock out throughout movement (this will assist shield against injury). Lat pulldowns are a fantastic different to rowing workout routines for working the identical muscular tissues. This exercise targets the latissimus dorsi, or lats, in addition to the biceps and rear deltoids. To carry out this exercise appropriately, sit on a bench together with your toes flat on the ground and maintain onto a bar hooked up to a cable machine above you.
It’s easy, however you also want to train safely to ensure that you keep away from harm and progress just as you would some other train. We hope that this train was useful and we’re assured that you simply now have the data to effectively embody this exercise in your coaching regime. Whereas the cable standing row (V-Bar) is a phenomenal option for helping to construct that roadmap back, there are so much of totally different variations that you ought to use, and that you might truly favor.
Loop the resistance band around the bottom of your ft with one handle in every hand. Seated rows are sometimes accomplished on a seated row machine or a seated cable row machine, and the directions for utilizing every are nearly the identical. When you’ve mastered type and may full the standard cable row exercise with control and energy, it’s time to challenge yourself with variations.
As with any train, though, you must use correct form if you would like to reap the advantages. Pay close attention to kind and really feel the actions and activations of your muscles. Instead of getting to shortly change plates you simply pull the pin out, select the next weight then go. The stages of a seated row involve arrange, the pull, and the release. Right Here are some methods to alter your cable row to hit totally different muscle tissue. Heather Jacques is a former collegiate athlete that graduated from Grand Valley State College with a Bachelor of Science in Athletic Training.
Comparable movements, just like the bent-over row, require you to maintain the backbone rigid to avoid inserting stress across the lower again. With the seated cable row, you’ll stretch the spine and the lats to permit for an even bigger range of movement via the pull. The cable shut grip seated row works your back muscle tissue in a horizontal pulling movement.
Cable are very effective for growing the dimensions and strength of varied back muscles. Not solely do they target the lats, however additionally they interact the rhomboids, lower and center traps, teres minor, and teres main. Preserving shoulder blades down and again throughout the motion engages the lats. Avoid using an extreme amount of weight, which causes the shoulders to shrug and pull with the arms as a substitute of partaking the back. Since the seated cable row involves motion on the shoulder joint, you will expertise deltoid engagement whereas performing this train. This exercise leads to posterior deltoid engagement throughout eccentrics and anterior deltoid stimulation on concentrics. Lengthen your hips to return your torso to the upright place whereas pulling the bar to your belly button by driving via your elbows.
To carry out this train, start by standing together with your feet shoulder-width aside and holding two dumbbells in each hand. Strengthening these muscle tissue won’t only improve the range of motion but in addition scale back the risk of damage due to overuse or instability in this area. The straight arm pulldown is a wonderful train for increasing shoulder mobility and stability. These giant muscular tissues run from the lower back to the upper arms and play an necessary role in shoulder extension and abduction. So let’s dive in and be taught all about straight arm pulldowns and what muscles are worked. When done properly, one should really feel a good pressure throughout this area of the again as properly as some contraction in these smaller muscle tissue along with those larger ones similar to lats and traps.
The full range of motion must be adhered too with each rep. If you limit the range of movement, then you’ll limit your positive aspects. «Where individuals are inclined to falter with upright rows is primarily in kind», Snyder said. If you create a large angle together with your torso relative to your thighs, you are working much less mid-back and have transferred the work into your glutes and low back such as you would in a deadlift. End the motion together with your torso at 90 levels relative to the ground. Right Here, Samuel talks us via every thing there may be to know about the cable row. So, while it isn’t solely a shoulder exercise, the Seated Cable Row effectively contributes to stronger, extra secure shoulders.
References:
where can i buy steroids for bodybuilding (https://www.metooo.it/u/67db1146d42e9f11760e0ae3)
No matter if some one searches for his required thing, thus he/she desires to be available
that in detail, therefore that thing is maintained over here.
overseas pharmacies
Finding the best CBD oil for anxiety can be easy and affordable. Since this is a full spectrum formula though, it can attack swelling throughout your body on several levels, through multiple channels. Broad Spectrum Hemp Extract — Promotes calmness and tranquility. Plus, it contains full spectrum hemp extract — and a lot of it. Then, we work with some of the greatest minds in the industry to extract rich broad spectrum, full spectrum, and THC-enhanced full-spectrum CBD. Like any trustworthy, care-focused brand, CBDistillery provides open access to full lab results for this product and all others available for viewing on the product page. Once verified the code will be added to this page. Ellevet reviews on this page consist of Ellevet Sciences reviews, Ellevet CBD oil reviews, and Ellevet Mobility Oil reviews. In addition to their effectiveness, these oils are also backed by thousands of positive reviews. If you need to read some Ellevet http://vshm.ru/bitrix/redirect.php?goto=https://greenstreetcbd.org/ oil reviews before you make your last decision, then stick with me here, as I am going to save you a few hours of research. My back and neck hurt after being on a computer for hours on end. You don’t have to spend hours scouring the internet or break the bank to find a suitable oil to calm your anxiety.
70918248
References:
https://lekai.info/rainaryan2507
Hi there are using WordPress for your site platform?
I’m neew to the blog world but I’m trying to get started and create my own. Do you need any html coding knowledge to make
your own blog? Any help would bee really appreciated!
70918248
References:
https://mediascatter.com/@levinolte27852?page=about
70918248
References:
anabolic steroids dangers (https://www.monasticeye.com/@faustinohatley?page=about)
70918248
References:
Does steroids make you stronger (https://followmypic.com/leroyvenn05625)
Here is my blog post :: https://cryptosbuz.com/
Then contemplate the slicing stack if you’re trying to combine Anvarol with different comparable nice chopping dietary supplements. As a end result, many feminine athletes select to keep away from Anavar altogether so as to reduce their threat of developing undesirable masculine traits. Overall, the increased power ranges supplied by Anavar may be extremely useful for many who want to improve their bodily efficiency.
Oxandrolone was no doubt decided to be a light anabolic steroid way back then, which made it attainable to be tolerated by feminine and child patients10. No steroid can really be considered a mild substance when used at doses for bodybuilding; it’s simply that Anavar is taken into account «pretty mild» compared to the really heavy stuff. Anavar has many advantages, and it’s a compound that worked well for me up to now. It might or is most likely not best for you, and you’ll find out extra about that within the information beneath. The only approach to safeguard towards any threat is to have a prescription for any anabolic steroids taken.
This might help people achieve a leaner and extra defined appearance, particularly during cutting phases when decreasing body fats is a major aim. When it involves usage, Anavar is usually included into steroid cycles for varied purposes. It is usually utilized during cutting cycles to help protect muscle mass while selling fat loss. Due to its gentle androgenic nature, Oxandrolone can additionally be favored by female athletes who seek performance enhancement without the danger of great virilization effects. Anavar, scientifically generally recognized as Oxandrolone, operates within the physique via a quantity of mechanisms to provide its desired results. Understanding the science behind this steroid is essential to comprehending how it works and its impact on the physique. In this article, we’ll delve into the scientific features and make clear its mode of motion.
As A Result Of of the brief length of these cycles, usually no longer than four to six weeks, solely short-acting or fast-acting steroids are used. These compounds begin working shortly, thus making it attainable to achieve fast gains. Cytomel (Liothyronine Sodium) can additionally be not an anabolic steroid in the traditional sense in that it isn’t based on testosterone. As An Alternative, it is a synthetic form of the thyroid hormone triiodothyronine.
Subsequently, if a soldier has low testosterone and is prescribed TRT, if he exams optimistic for testosterone, the take a look at will come back as adverse to the commander. We discover that if junk foods are consumed throughout a cycle, sodium levels will rise, inflicting water retention. This can inhibit Anavar’s diuretic results, causing the muscular tissues to look increasingly easy and reduce muscle definition, striations, and vascularity. Alcohol has a unfavorable impact on cortisol ranges (35); thus, fat-burning may turn into inhibited. Furthermore, cortisol is a catabolic hormone, that means heavy alcohol consumption might scale back muscle mass. For maximum outcomes, users should reduce alcohol consumption during a cycle.
This is indicative of the product being underdosed, as 20 mg is greater than adequate to experience important adjustments in physique composition. Pharmaceutical-grade Anavar was once synthesized by scientists in an authorized laboratory when it was authorized for medical reasons. This was prescribed to sufferers affected by cachexia, where muscle loss was occurring at an alarming rate, growing the danger of mortality. Regardless Of the above protocol being effective, DHEA is the official medical therapy prescribed to women for low androgen levels. Bodybuilders commonly take a dose of Anavar forty five minutes before a workout, resulting in a constructive effect on motivation, energy levels, and focus.
Dbol can only be run for brief cycles when you don’t wish to stuff up your liver massively. Anavar will still affect liver enzymes, however not to the level that Dbol and different harsh orals do. Anavar is also a compound that can be used by females at decrease doses with a much decrease probability of virilization results in contrast with other steroids. Fat loss continues to be more doubtless to happen for ladies (unless your food regimen is very calorie-heavy). The fats loss mixed with lean positive aspects can result in an overall acquire in physique weight, but importantly, it shouldn’t be water weight, and the features must be all muscle. Enhanced muscular definition is feasible after a single Anavar cycle for ladies, even at decrease doses of 10mg.
Expect very quick outcomes with this stack because of Anadrol, the fast-acting oral steroid. Mass and strength increases are the game’s name right here, and you will discover them considerably. Hell, even novices can start with a easy stack with minimal danger as long as the basics of dosage, cycle size, aspect effect control, and PCT are followed. You should not use slow-release compounds in a short cycle as they will not have sufficient time to behave in the body. The popular Testosterone Enanthate is most commonly utilized in a high-dose cycle. It carries a half-life of around one week and makes it attainable to maintain optimum blood plasma levels by administering only one injection weekly throughout your cycle.
You can expect impressive power gains, which will, in flip, increase your efficiency and capabilities, which all result in greater, quicker positive aspects. 20lbs of mass isn’t out of the question by the end of the cycle, but you’ll need to concentrate to controlling fluid weight for best outcomes. In this type of cycle, you utilize very high doses of one or more compounds. This kind of cycle is not for the faint of coronary heart, and customers should pay attention to the potential for a better risk of unwanted facet effects. There are no shortcuts, and you won’t turn out to be a complicated consumer by talking to other folks about their steroid use because every single individual has a unique experience with steroids. Once you’ve truly reached the stage of advanced data and advanced expertise with steroids, it is possible for you to to move to the highest and most superior degree of anabolic steroid use. It takes time to become a confident advanced steroid user, so if you’ve made it that far, then you possibly can consider your self to be in the enviable group of high-level steroid customers.
For instance for an off-season ice hockey participant, or for a rugby player the outcomes may be extra welcomed during this part of the season. Anavar might help repair muscle injury by way of training and permit most of these athletes to train tougher, and extra incessantly. It may help restore muscle damage after a participant receives and impact damage i.e. from a physique check, fall or fast paced collision.
Thus, with this fluid eliminated, trenbolone users can develop a extra toned and dry look. 10 mg/day of Anavar, in cycles lasting 4–5 weeks, is unlikely to trigger any points with regard to masculinization (11). Anavar has a relatively low risk of causing virilization in women when taken in therapeutic dosages.
References:
definition of Steroids (https://www.aytokariyer.com.tr/employer/anavar-for-women-side-effects/)
Roughly a decade after Anavar got here available on the market, there was promise of it being a medication to efficiently deal with high ldl cholesterol. This was as a outcome of doctors in the ’70s observing reduced whole cholesterol levels in Anavar users (15). Masculinization is still attainable if doses larger than 10 mg a day are utilized. Research have reported women experiencing virilization results when receiving high doses of zero.a hundred twenty five mg per kg (13) constantly for a year.
As you possibly can see, you’ll be stunned how much more muscular you possibly can look from simply losing fat. This is why you possibly can look so much bigger after a reduce, because fats hides all of your definition and vascularity. Muscle gains will not be overly dramatic on Anavar, compared to the opposite compounds on this list, nevertheless, if an enormous mass isn’t the aim; an Anavar-only cycle is often chosen.
Arnold is rumoured to be one of many great bodybuilders who used primo, helping him to become the greatest Mr Olympia champion of all time. Taking Anvarol will improve your phosphocreatine ranges, which will assist you to produce extra ATP and allow you to work out more durable and longer. The energy wanted to contract your muscles comes from ATP (adenosine triphosphate).
Some wish to live on the edge, whereas there are those of us who need to balance the advantages and dangers. I wouldn’t wish to go beyond six weeks if any more than 50mg is being taken (rarely). 50mg day by day is the best normal dose to stability desirable advantages and side effects. Few Anavar customers will discover a must take the dosage beyond 50mg, and most males admit that they don’t see the benefits they anticipated under 50mg.
These numerous types of testosterone possess distinct esters, which decide their absorption price and length of presence in the physique. The commonplace forms of testosterone are enanthate and cypionate, attributed to their affordability and ease of administration. Anavar is a managed substance in lots of countries, including the United States. It is unlawful to make use of without a prescription and can lead to legal consequences. Total, we believe that Anvarol is a more smart choice for most individuals than Anavar. This steroid can cause the hair follicles to shrink and finally die.
Though not deleterious in nature, manboobs can have a unfavorable psychological impression in addition to being physically undesirable for some customers. Trenbolone has diuretic properties, inflicting extracellular water to be flushed out. This is the water that collects exterior of the muscular tissues, causing a smooth and puffy look.
If you’re utilizing Anavar for chopping functions, you will need to make use of it for a shorter time period than if you’re utilizing it for bulking functions. Additionally, when you discover that you are tolerating it properly, you can extend your cycle size. It’s usually really helpful to take Anavar with food, preferably with a source of wholesome fat to aid absorption. Avoid taking it with calcium-rich meals, as calcium can interfere with the absorption of the drug. For men, the really helpful Anavar dosage sometimes ranges from 20-80mg per day, with most males finding 50mg to be the sweet spot. It’s important to seek the assistance of a healthcare supplier if abdomen pain persists or worsens.
The Var and Clenbuterol cycle might be the most typical fats loss mixture where both steroids and non-androgenic PEDs are involved. Anavar is the anabolic factor that’s used to maintain lean muscle mass ranges (or perhaps improve them), and Clenbuterol is used to burn fat. If you’re already at a reasonably low body fat (13% or less), this combo will actually assist you to to change your physique composition and enhance your total aesthetics.
Starting with a decrease dose and steadily rising it over time allows the physique to adapt to the compound. It is crucial by no means to exceed the recommended dosage as it could considerably enhance the chances of antagonistic effects. Primobolan is an orally active anabolic steroid that binds to and stimulates Androgen Receptors in the muscle tissue. Ernst Peibst is an professional in anabolic steroids and PEDs with over three,000 hours of research. He Is been educating individuals for 7 years by way of his articles, written after learning science papers, skilled books and consulting high doctors within the subject.
This is why Anavar is commonly used during chopping cycles, where the goal is to lose fat while preserving muscle mass. The best time to take Anavar is dependent upon your goals and how your body reacts to the steroid. Many individuals take Anavar in the morning with meals to assist scale back stomach upset.
Anavar is hepatotoxic by nature and exceedingly prolonged cycles could result in liver-related health points. As a result, the FDA has prohibited the sale of a quantity of peptides formerly favored by bodybuilders and fitness fanatics due to their purported muscle-building and performance-enhancing attributes. Similar to 7-KETO DHEA, B-AET doesn’t suppress the HPTA and promotes fats loss by inhibiting cortisol. Primarily Based on private expertise, B-AET provides superior results in comparison with 7-KETO DHEA. The greatest approach to confirm the standard of AAS and steroids bodybuilding is through third-party lab testing. Reputable sellers often provide lab reviews or certificates of study that verify the purity and efficiency of their products.
The key to success with Anavar lies to find the right dosage and cycle tailored to your body and objectives. For beginners, it is essential to begin out with a conservative approach, to higher understand how the steroid works in their system earlier than making changes as wanted. For novices in bodybuilding, Anavar could be a light and effective starting point. It helps kickstart their muscle growth journey with a decrease dosage and a shorter cycle, usually lasting for six to eight weeks. This preliminary experience acquaints novices with the consequences of the compound, and also permits them to regulate the cycle primarily based on their targets and individual reactions. Keep In Mind, the responsible use of Anavar goes hand in hand with applicable dosages, cycle lengths, and post-cycle remedy (PCT) protocols. Monitoring your body’s response, managing potential side effects, and prioritizing overall well-being are key features of using Anavar safely and successfully.
References:
https://emploi-securite.com/societes/anavar-oxandrolone-for-sale/
Turinabol is often utilized by professional athletes who compete in tested federations. Probably as a end result of quick half-life and the reality that it’s simple to cover. Gains are lean due to their DHT nature, and the worst side effects are going to be hepatotoxicity and ldl cholesterol issues. Turinabol is one other 17-Alpha Alkylated Steroid, thus, it causes hurt to the liver. Many British bodybuilders (and older bodybuilders) will use Primobolan stacked alongside Testosterone to assemble a mean cycle. They pose quite lots of well being dangers and a few different nasty unwanted facet effects as well. Discover the panorama of the most secure steroids and cycles with a clear and concise focus.
Primarily, this substance has made a reputation due to its significant help in fats loss and muscle definition. Moreover, it provides an power enhance, essential for sustaining performance throughout exercise classes. Nevertheless, it’s essential to keep in mind that these benefits don’t come without potential risks. Responsible usage, keeping track of unwanted effects, and recognizing the need of ongoing monitoring—all these elements have to be factored in right on the outset. Aspect effects of Anavar embody liver damage, increased blood stress, and increased cholesterol levels.
Sadly, many steroids are counterfeited on the black market; due to this fact, it is unimaginable to know what the compound is with out testing it. Anavar (oxandrolone) is an oral anabolic steroid created in 1962 to advertise lean muscle mass in those suffering from muscle-wasting circumstances. The other major goal when formulating Anavar was to create a light drug with few unwanted aspect effects so girls and children may safely take it. Dianabol and Anavar stacked collectively may seem unusual, as Anavar is a cutting steroid with diuretic results, while Dianabol is a bulking steroid that promotes water retention. Dianabol additionally increases visceral fat storage, while Anavar decreases it. Nevertheless, we’ve observed this unconventional stack to be an efficient bulking protocol, as Dianabol increases muscle mass and Anavar simultaneously prevents fats accumulation.
The main distinction right here will be how quickly any unwanted effects might develop in comparability with utilizing solely a big ester compound that takes some time to kick in. If you’ve experienced side effects with a similar dose of any testosterone steroid, then you’re likely to see the identical thing happen with this one. There’s lots to consider if you’re nonetheless deciding between utilizing Sustanon or single-ester testosterone. Finally, it’s going to come right down to the sort of cycle or stack you propose to run and the way typically you’re comfortable injecting. However there are additionally plenty of different AAS to which we can compare Sustanon 250.
This may cause signs of low testosterone when your cycle ends, including lack of muscle and fats achieve. Males on a slicing cycle with Anavar can anticipate an outstanding fats loss, and it will be quite quick because Anavar is a quick-acting steroid that you’ll only use for eight weeks max. Utilizing Anavar at low to moderate doses is about as safe as it could get for anabolic steroid use.
In the US alone, potential massive fines and jail time are an actual possibility for anyone getting caught with Trenbolone or different steroids. These who are wholesome and stick to reasonable doses and quick cycles with suitable breaks in between will reduce dangers to those vital organs. You ought to be aware that it’s common for urine shade to turn out to be darker when using Trenbolone, and that is usually mistaken for blood or a sign of kidney toxicity. Nonetheless, the most common cause is the traditional oxidation of Trenbolone, resulting in a dark, rusty color. Parabolan is a steroid that’s extra suited to a minimum of intermediate-level steroid users, and you’ll contemplate working it for an prolonged 12-week cycle for bulking or chopping. As A Result Of Tren Hex is a slow-release steroid, we need to use it for an extended period than many different steroids, and for many users, it will imply a cycle of a minimum of ten weeks. You might not see any noticeable outcomes for the primary month of this cycle because of the time this steroid takes to achieve its peak ranges within the physique.
This corresponds to the bottom dose most of us will look to take every day. But if you need to start at 10mcg, splitting a tablet in half is straightforward enough. Since weights at the moment are out of the equation, you need to increase your cardio to 6x/wk for an hour a session. This is far simpler when you go to the fitness center; you only have to worry about cardio.
This means you have not any concept where your Winstrol has been manufactured, what exactly may be in it, and who has created it. A well-known brand right here is Azolol (oral Stanozolol), made by British Dispensary, a Thai-based pharmaceutical and cosmetics firm. As we might expect, they make 5mg tablets and are popular targets for counterfeit Winstrol producers who often try to mimic this high-quality product’s packaging. To try to combat this, British Dispensary locations a emblem holograph on the bottles, which you need to take special care to confirm upon purchase. The results that females can get from Winstrol can differ considerably from those of men.
We know it to be the highest-priced pharmaceutical steroid, along with Primobolan. BTG was granted orphan drug designation for treating uncommon muscle-wasting illnesses and circumstances corresponding to AIDS, Turner syndrome, and muscular dystrophy. This gave BTG seven years of market exclusivity, resulting in a pharmaceutical monopoly. Consequently, BTG was capable of significantly increase the price of Anavar by 1,200%.
Anavar provides you with a pleasant strength boost, which is welcome when weight-reduction plan. Anavar’s capacity to dry and harden the physique is just useful should you lean, retain existing, and build lean muscle. Stacking Clen with Anavar will enhance fats loss, help you gain lean muscle, and promote a more durable and dryer physique with elevated vascularity. We stick to a low dose of Anavar right here to attenuate further unwanted effects on top of Clen’s, but you’ll find a way to optionally take extra Anavar if it fits your objectives. Anabolic steroids and different types of fat loss and performance PEDs are often stacked with Clen.
So if you’re making an attempt to realize lean mass and muscle, stay very anabolic or are struggling to eat enough meals to meet excessive calorie intake needs based on activity ranges, then it make senses to go along with GHRP-6. On the flipside, if caloric restriction and fast fats loss are your goals, then GHRP-2 is going to be a superior selection compared to GHRP-6. GHRP-2 does indeed trigger far less urge for food stimulation, so it can be a extra helpful alternative for someone attempting to keep lean and keep their eating in examine. If you tend to overeat and wrestle with slightly extra fat around your center for example, go with the GHRP-2 as a substitute of GHRP-6. GHRP-2 is usually considered superior to GHRP-6 because it could be dosed in larger amounts with much less desensitization. Both GHRP-2 and GHRP-6 are likely to trigger fluctuations within the body’s pure production of prolactin and cortisol, which can also be regarding from a hormonal standpoint.
References:
how long does it take to get big On steroids; https://teba.timbaktuu.com/employer/best-place-to-buy-anavar-online/,
Anavar’s medical makes use of are diverse, reflecting its potent anabolic properties and gentle side effect profile. One of its earliest clinical purposes was within the remedy of severe burn victims. Anavar’s capability to advertise tissue progress and restore made it an invaluable tool for enhancing recovery outcomes. Thirty-two healthy adult males aged 60–87 were randomized to receive 20 mg of Anavar per day or a placebo for 12 weeks.
Subsequently, if Anavar is taken with the intention of bulking and gaining lean mass, then a small calorie surplus could also be adopted to boost muscle and power results. Clenbuterol burns a big amount of subcutaneous fat, much like Anavar; thus, combining these two compounds will end in important fat loss. Regardless Of the above protocol being effective, DHEA is the official medical therapy prescribed to girls for low androgen levels. Over half a century later, quite a few girls have used Anavar anecdotally and in analysis. Now it’s widely thought of that doses in the range of 5–10 mg produce noticeable results while inhibiting virilization. Bodybuilders commonly take a dose of Anavar forty five minutes before a workout, leading to a optimistic effect on motivation, vitality ranges, and focus.
If you have already got excessive aggression, that is one compound to keep away from. We strongly advise bodybuilders to avoid utilizing trenbolone due to the probably deadly effects it could cause. We have discovered that the danger of atherosclerosis and left ventricular hypertrophy significantly will increase with trenbolone cycles. In our expertise, customers will encounter all of the effects of injectable trenbolone, but with notably enhanced results and significantly extra hepatotoxicity. Oral trenbolone is perhaps essentially the most dangerous anabolic steroid we now have come throughout, with the risks being very high for most users (psychologically and physiologically). Our sufferers have reported speedy fats loss while also constructing noticeable amounts of muscle and energy on trenbolone/Winstrol cycles. If cycles are used sparingly, we now have seen hair loss reverse post-cycle; however, if someone aggressively makes use of these steroids long-term, hair loss may be permanent.
These are a few of the points bodybuilders who visit our clinic face when acquiring UGL Anavar. This is more widespread with Instagram fashions or individuals often appearing on magazine covers. There is high strain on these people to constantly look in wonderful situation, in order that they utilize Anavar as someone would with testosterone on TRT (testosterone alternative therapy). We discover that Anavar users can drink small amounts of alcohol and not expertise any critical hepatic points.
That is why many atletes stack Hi-Tech’s new Phosphagen® Creatine complement with Anavar®. Thus, the bodybuilder who wisely chooses Anavar® could have the additional quantity of muscle fuel obtainable to finish the extra reps required to tug the trigger for muscular tissues to develop. Thus, a moderate dose taken in the morning is basically out of the system by night, yet supplies affordable levels of androgen in the course of the day and early night. By stimulating the synthesis of phosphocreatine within your muscle tissue, Anvarol works similar to the anabolic steroid Anavar to extend energy and vitality. During cutting cycles, you’ll shred fat whereas retaining lean muscle, making you look lean and reduce.
Oxandrolone is an oral androgen derived from dihydrotestosterone (DHT) and includes a 17-alpha methyl substituent. It was acknowledged as early as the Forties that 17α-alkyl substitution retards the presystemic metabolism of testosterone, extending its half-life and making it orally lively (Minto, Steroids). It’s important to note that the results of those steroids can range significantly from person to person, so it’s greatest to consult your doctor earlier than starting any steroid cycle.
Depending on your reaction to the Anavar, you’ll have the ability to maintain including more to the dosis during the the rest of your cycle. Solely only a few amongst many users have point out that they skilled serious side effects whereas utilizing Anavar. Even although women might get hold of outstanding results while using Anavar on its own, males might have to use some additional anabolic steroids so as to obtain the finest possible end result.
Hence, the lower in SHBG continues to be extremely useful no matter your testosterone levels when using this steroid. Anavar additionally increases nitrogen retention within the muscle17 – it is a prime function of Anavar and is crucial in preserving the body in an optimum anabolic state. The consequence is retaining muscle mass whereas chopping fats by preventing the body from going right into a catabolic state the place muscle tissue is misplaced, as is when nitrogen balance turns into negative18.
It is essential to speak with a physician earlier than starting any new medicine regimen including Anavar as it carries severe dangers if abused or taken without medical supervision. Some girls could experience shorter or longer cycles, whereas others may expertise changes within the amount of bleeding or the duration of their period. Studies have proven that ladies who use Anavar might expertise adjustments within the size, move, and period of their menstrual cycles.
One examine discovered that a 20mg day by day dose of Anavar for 12 weeks resulted in a 35% decrease in testosterone ranges. One Other examine discovered that a 40mg daily dose of Anavar for 8 weeks resulted in a 50% lower in testosterone ranges. Nonetheless, it’s essential to note that not everyone will experience these identical ranges of a shutdown. Research has shown that Anavar can have some delicate shut-down effects on testosterone production in some customers. Nonetheless, the degree to which it shuts you down will depend upon several factors, together with your dosage, genetics, and private response.
Furthermore, increasing your dosage can also improve the danger of unwanted effects. Yes, you can take 50 mg of Anavar a day, nevertheless it’s necessary to note that this should be carried out under the supervision of a healthcare skilled or a licensed steroid skilled. This dosage is usually extra appropriate for men and experienced steroid users. The beneficial dosage of Anavar for males is 20-50mg per day, and for girls is 5-20mg per day. I’ve noticed some variations in the capsule colors, starting from white capsules.
This means that in case you have some male pattern baldness later in life, Anavar could deliver this on earlier. Men are much less prone to run this cycle but will want a testosterone base (e.g., 200mg/week) and might observe with a normal Nolvadex or Clomid PCT protocol for four to 6 weeks. The other very fashionable chopping steroid for ladies, subsequent to Anavar, is Winstrol (Stanozolol).
References:
pct steroids (https://somportal.com/employer/where-can-i-buy-anavar-legally/)
Contact us for extra data on our Anavar merchandise, really helpful cycles and dosages, and how you can place an order at present. Anavar is used for treating medical situations and for bulking, slicing, and athletic enhancing performance. This is one of the many explanation why female and male athletes include Var of their coaching program. Estrogenic unwanted aspect effects are fully nonexistent with Anavar due to the fact that it is a by-product of DHT, which is an androgenic hormone that’s already unable to convert into Estrogen. In different words, the unwanted facet effects typical of Estrogen (such as water retention, bloating, fats retention/gain, and development of gynecomastia) are fully unseen. In addition to a complete lack of Estrogenic activity, Anavar additionally utterly lacks any Progestogenic activity as well[3], thus negating any potential unfavorable effects there too.
To enhance the effectiveness, combining the dosage with a protein-rich diet and incorporating regular cardio and power training is crucial. This holistic technique emphasizes the importance of a tailored lifestyle to maximize the advantages of the Anavar slicing cycle for women. It is important to keep in thoughts that Oxandrolone is a extremely regarded and extensively used medicine recognized for its optimistic impression on sufferers suffering from various medical circumstances. Serious side effects could embrace liver illness or toxicity, heart illness, coronary heart assault, or stroke.[1][2] Discuss to your healthcare provider about potential unwanted side effects and risks.
Moreover, users are suggested to bear liver function checks before, throughout, and after their cycle to observe enzyme ranges. A latest report from the American Heart Affiliation emphasizes that Anavar, like different steroids, could have an effect on LDL cholesterol levels, resulting in increased cardiovascular dangers if used irresponsibly. For users within the US, the place quick meals consumption is prevalent, the danger of ldl cholesterol imbalance is higher. To mitigate these effects, incorporating omega-3 dietary supplements and heart-healthy meals like salmon and walnuts is strongly really helpful during cycles.
This prohormone is nice for adding in a dry prohormone to a cycle or used alone to offset the environmental estrogens in your food plan. Lastly, Anavar® makes use of Epiandrosterone, which is an endogenous steroid hormone present in Anavar® with an androgenic activity. Epiandrosterone and is produced in the physique as a metabolite of testosterone.
However, such makes use of are uncommon in the us at present due to strict laws despite this steroid’s tremendously profitable and constructive observe report. Anavar has additionally proven to be effective for treating hepatitis, as nicely as selling progress and development in kids who lack the required hormone manufacturing. Yes, it’s attainable to make use of Anavar (oxandrolone) on its own, and some people choose to take action for various causes. Using Anavar solo means that it is the sole anabolic steroid within the cycle, and it’s not mixed with other compounds. Folks could go for a solo Anavar cycle for causes such as its mild nature and decrease chance of inflicting certain unwanted effects compared to another steroids.
A small enhance in blood pressure may take place, with it able to elevating LDL cholesterol levels. Take your time to analysis the distributors and read reviews of previous consumers so that you confirm that you are dealing with the best vendor. If you’re taking Anavar for building muscle, it is best to stack it with other supplements. Nonetheless, talk about the unwanted effects and potential interactions at size along with your doctor to be secure.
Anabolic steroid use carries potential dangers, and medical supervision is essential to watch for unwanted aspect effects, ensure applicable dosages, and handle any health issues. Anavar’s reputation as a strong but delicate anabolic steroid makes it a best choice for athletes and bodybuilders focused on sustaining muscle, enhancing strength, and attaining a lean physique. When you purchase Anavar from Pharmaqo, you’re investing in a product with verified purity, efficiency, and security, supported by Pharmaqo’s dedication to quality and buyer care. Out There in 10mg and 50mg choices, Pharmaqo’s Anavar meets the needs of recent users and seasoned athletes.
One study has demonstrated that simply 300mg of caffeine administered alongside Anavar elevated subjects’ blood plasma ranges of Anavar by 15 – 20x in comparison with baseline levels[10]. Anavar is a modified spinoff of DHT (Dihydroteststerone), and possesses a quantity of modifications that alter its activity in numerous methods. It is C-17 alpha alkylated to be able to enable for oral administration, and a substitution of its second carbon atom with an oxygen atom, granting it stronger anabolic capabilities.
Final however not least, Anavar is one of the solely true fats burning steroids. Most all anabolic steroids will enhance the metabolic fee, which can promote fats loss, but Anavar has been proven to directly promote lipolysis. Many attribute this to its capability to firmly bind to the androgen receptor, as properly as in its capacity to scale back thyroid-binding globulin, in addition to increase thyroxine-binding prealbumin. This motion results in the triiodothyronine hormone or T3 hormone being utilized to a better diploma.
Nevertheless,anavar has a DHT nature which may produce pimples, hair loss, and prostate enlargement. Unfortunately, this makes in a bar a hepatotoxic steroid, a trait shared by all c-17 alpha alkylated steroids in the case of Anavar whereas hepatic in nature. It is somewhat delicate actually most will find liver enzyme values to only increase at a minimal price with responsible supplementation. Oxandrolone is a c-17alpha alkylated anabolic steroid this refers to a structural change of the hormone on the 17th carbon position. That permits it to be ingested orally and survived the first move by way of the liver, a necessary trait in order for its survival. Anavar, sometimes called «Var» or «A-var» when discussing it’s use as a sports performance enhancer. This article covers the authorized anavar supplement, in addition to the previous a-var which contained oxandrolone.
So whether you’re a beginner or an experienced bodybuilder, learn on for all the data you have to take benefit of Anavar. Scientific research indicates that the elements act genetically through the androgen receptor (A.R.) and cell surface receptors. Anavar’s capacity to bind androgens is its primary advantage in muscle mass gain, strength, and lack of side effects.
References:
What Steroids Should I Take To Get Ripped, https://anunciosclassificados.org/author/juliet8112/,
This can be especially beneficial for bodybuilders who prepare incessantly and wish to minimize the danger of damage. Another benefit of the Take A Look At Deca Anavar cycle is improved energy and endurance. Testosterone is known for its capacity to extend power and power, whereas nandrolone helps to improve endurance by rising the variety of purple blood cells in the body.
In order to attempt such a cycle, you should have prior experience with steroids. Ideally, you need to have been on an Anavar cycle alone earlier than you probably can have testosterone thrown in. As a matter of truth, these two compounds are so similar that they are often interchanged during the course of a cycle. For occasion, if you are on an 8-week cycle, you can actually use Testosterone enanthate for the primary four weeks after which continue with cypionate for the following 4 weeks and nonetheless handle to get the same results. Anavar has been successfully used as a therapy for anemia as it has a helpful effect on the variety of red blood cells in the body. By rising the red blood cell count, Anavar helps improve oxygen move to the muscle tissue throughout train.
Testosterone is a vital hormone for building muscle and increasing power, whereas Deca Durabolin helps with joint pain relief, restoration, and muscle gains. Anavar is a superb steroid for chopping and enhancing muscle definition, making it a perfect addition to this stack. From my expertise, incorporating both Winstrol and Anavar right into a cutting cycle can lead to impressive outcomes. When the dosages are properly managed, I’ve noticed vital muscle gains and speedy fats loss. It’s been significantly helpful for reaching that desired dry and chiseled look.
And Testosterone Cypionate won’t surprise you with unexpected unwanted effects. As an unaltered testosterone hormone, we all know precisely what it does – not like many of the funky unwanted facet effects that often include modified AAS like Trenbolone. Even although Testosterone Cypionate is no doubt the safest steroid that males can ever use, it’s nonetheless possible for adverse unwanted aspect effects to rear their heads. Here is an example of a sophisticated Testosterone Propionate chopping cycle containing Trenbolone and Clenbuterol. All Through the cycle (or a minimal of on hand), it’s good to take an aromatase inhibitor (AI) like Arimidex at 0.5mg/eod or 12.5mg/day Aromasin. In my expertise and that of MANY other bodybuilders, we find that Testosterone Cypionate is a much less painful or irritating injection than Testosterone Enanthate due to the different service oils.
Females who’re still determined to use Testosterone Cypionate regardless of the risks ought to look to use it at very low doses of around 20mg weekly whereas monitoring for any undesirable adverse results. With the higher rate of protein synthesis that occurs when you’ve larger testosterone levels, the restore and development of muscle fibers are accelerated. And with your muscular tissues holding more nitrogen, they can additionally store more protein. Your elevated red blood cell depend will enhance endurance, transporting more oxygen to the muscular tissues. But as with all anabolic steroids, the negatives do come together with the positives. Testosterone Cypionate may be described because the most secure steroid to use, being an unaltered form of testosterone.
Together, these two steroids are a potent mixture that can help you reach your objectives. With Out PCT, you run the chance of experiencing side effects corresponding to fatigue, despair, and decreased libido. Third, the two steroids work properly together and might really enhance one another’s effects. Second, testosterone can also be a strong steroid and ought to be utilized in moderation. If you do all of this stuff, you need to be capable of see nice outcomes from your Anavar and testosterone cycle. It stimulates sperm manufacturing, tells physique tissues to develop, and might current male characteristics, similar to a deep voice.
Primobolan, a brand name for the anabolic steroid methenolone, presents unique characteristics in its chemical profile and results. It is derived from dihydrotestosterone (DHT) and is out there in each oral and injectable types, with distinct anabolic and androgenic effects. Winstrol and Anavar’s stack or cycle is a win-win for each men and women. They present athletes with an effective answer to get the lean, toned physique they need whereas providing reduction from muscle fatigue among other things. The Winstrol and Anavar cycle helps athletes get leaner while enhancing their efficiency on the same time. But you need to be careful of both steroids because these effects could generally lead to severe health problems. Boosting your energy ranges is important for athletes who want to maximize their performance.
Nevertheless, because of the Anabolic Steroids Management Act of 1990, Anavar turned unlawful to purchase and not using a medical cause. Thus, common prescriptions for bodybuilders and athletes have been no longer issued. Users’ genetic make-up will decide the extent of hair loss they will expertise. Anavar is a DHT-derived steroid; thus, accelerated hair loss may be skilled in genetically vulnerable people.
In addition to the reduction in physique fat, the preservation of lean muscle is another end result of utilizing Anavar, often mistaken for lack of weight loss. You see, since Anavar supports the upkeep of muscle mass while promoting fat loss, its results on the size won’t be outstanding. But, don’t be deceived by the dial on the dimensions; the transformation is more muscle and fewer fats, leading to a leaner, more healthy physique composition. Bodybuilders typically leverage this stack to realize strength and muscle definition whereas aiming to limit water retention and fat acquire. Anavar just isn’t generally recognized as a robust mass-building steroid, and even at excessive doses (which is not recommended), it will do little to stimulate large development in muscle mass in comparison with other anabolic steroids. For this cause, Anavar is sort of at all times used as a cutting steroid, which is the purpose it excels at. Throughout this guide, we’ll provide useful information to assist you make informed selections about an Anavar check cycle.
Anavar may be cycled as a standalone steroid and it can be stacked with different steroids too. Listed beneath are a few of the most typical Anavar cycles utilized by bodybuilders, each new and superior, to realize their fitness targets. It is considered a light steroid as a outcome of it has comparatively fewer unwanted aspect effects (than other anabolics similar to Dianabol, Trenbolone or Winstrol).
Holding on to it after the cycle presents a larger problem than reaching your shredded physique through the cycle, and that is something you must plan for. There’s rather more to know concerning the unwanted effects of Anavar and all anabolic steroids, so go to my primary side effects guide right here. Potential unwanted effects can include deepening of the voice, body hair development, clitoral enlargements, and menstrual irregularities. Females can, after all, additionally see adverse results within the areas of liver, kidney, and cholesterol.
References:
https://impulsame.net/georgianna
When it involves Anavar and testosterone, you will wish to keep your cycle size comparatively quick – round eight weeks. Just make sure that you are utilizing the proper doses and cycling correctly to keep away from any adverse side effects. You will also wish to make sure that you are taking an excellent high quality multivitamin and fish oil complement as well as following a healthy diet and exercise program.
PCT helps to normalize hormone levels after the cycle, which might shorten restoration occasions and preserve muscle gains. Anavar advantages women by increasing lean muscle mass, enhancing fat loss, and bettering power with out important androgenic results. The wonderful thing is that outcomes from Anavar can be astounding in that one may see visible changes in muscle definition, body fats share, and total physique. As such, Anvarol increases phosphocreatine ranges in muscle tissue, translating into enhanced ATP synthesis (adenosine triphosphate).
Blood pressure, cholesterol, aggression, neurotoxicity, nausea, it’s going to take a lot of effort. Another DHT by-product like Anavar, but finally ends up being barely more intense. Winstrol has a higher drying impact, more than likely due to its downregulation of Progesterone, which finally ends up in much less water weight. So Trenbolone is 5x stronger than Testosterone in relation to boosting male hormones such as DHT. These who have tried Trenbolone will have the ability to testify how powerful this Anabolic Steroid is.
Many customers have skilled constructive outcomes inside 2 weeks of starting their Anavar cycle. The effects of Anavar include a rise in energy, endurance, and lean muscle mass. Winstrol, also identified as Stanozolol, is a well-liked anabolic steroid used by males to achieve particular health goals. When used as part of a deliberate cycle, men tend to notice important adjustments of their physique composition and athletic performance.
Men who take Anavar can anticipate to see a rise in lean muscle mass, in addition to a reduction in physique fat. This is because Anavar helps to spice up protein synthesis, which is essential for muscle development. Additionally, Anavar might help to enhance your strength and endurance, allowing you to work out tougher and for longer periods of time. One of the first benefits of Anavar is its ability to advertise lean muscle progress. By enhancing nitrogen retention and increasing protein synthesis throughout the muscular tissues, it creates an surroundings conducive to muscle growth. Furthermore, its anabolic properties help forestall muscle breakdown, permitting users to maintain their hard-earned positive aspects during cutting phases or calorie-restricted intervals.
As far as fats loss is anxious, the results are also permanent however you need to remain disciplined with each your food plan and training so as to keep results. If you come off Anavar and start eating junk meals, the outcomes with clearly diminish. It’s subsequently not advocate if gaining mass, size and energy is the number one priority. Anavar is especially in style in bodybuilding, with it thought to be the most popular steroid available on the market at present. Var’s in high demand as a outcome of girls take it in addition to males (which can’t be stated about different steroids).
The woman in the image above (anonymous) is thought to have consumed 10 mg of Anavar per day for aa 5-week cycle and shed appears to have lost lots of body fats which is clear from her midsection. She is known to have increased her body weight from 52 kgs to fifty four kgs which means muscle gain. An spectacular attribute of this drug is its propensity to target stomach and visceral fat. These sections have gained notoriety for being notably cussed to lose, no matter food plan and train routines.
A study with older adults indicated a 3% improve in lean body mass after consuming 3 mg/day of Ostarine for 12 weeks, equal to a 2.4kg (5.three lb) muscle acquire in an 80kg (176lb) particular person. Even at such a low dosage, the features are considerable, particularly when compared to the larger doses typically taken by weightlifters to alter body composition. Anavar, additionally identified by its generic name Oxandrolone, is an oral anabolic steroid that has gained reputation among athletes, bodybuilders, and health fanatics. Developed within the Nineteen Sixties, it was initially used for medical functions, notably for selling weight acquire in patients affected by muscle-wasting conditions or recovering from surgical procedures. Nevertheless, its remarkable results on enhancing performance and physique soon caught the attention of the fitness community. Trenbolone is thought for its powerful muscle-building results, whereas Winstrol helps to amplify these effects, once more by selling lean muscle improvement.
Determining the efficacy of any anabolic steroid, similar to Oxandrolone, is of paramount significance. Enhancing strength and endurance is another noteworthy aspect of Anavar’s cutting-oriented advantages. Enhancing users’ physical efficiency empowers them to push by way of their exercises with heightened intensity and focus. This may end up in steady progress as the body adapts to extra onerous calls for and escalating challenges.
Muscle loss and fats are always risks during a calorie-deficit section or cutting cycle. Anavar will help protect lean muscle mass whereas promoting fat loss in order that the muscle gains one has made throughout bulking are retained. This issue is essential for ladies to retain their hard-earned muscles while losing excess fat. Since Anavar is so efficient in promoting fat loss, it’s significantly in style in chopping phases. By raising metabolic exercise, the body metabolizes fat at the next rate while burning fewer calories and sustaining lean muscle mass. When this occurs, the finish result is a toned and well-sculpted physique, therefore the efficiency and desire of female bodybuilders toward lowering physique fat percentages.
This results in lean and aesthetic muscle positive aspects as an alternative of bloated-looking muscles. During the primary week of an Anavar cycle, you might start to expertise an increase in vitality and endurance. This can help you to push tougher during your workouts and improve your total depth. As your cycle progresses, you might additionally begin to notice a reduction in body fat and an increase in muscle definition. Anavar is a light steroid, however it might possibly nonetheless suppress your body’s natural testosterone production. This is why PCT is important to assist restore your hormone ranges and stop any adverse side effects.
Another potential draw back of Anavar usage is the risk of hormonal imbalances. Using anabolic steroids can affect the body’s natural hormone manufacturing, and Anavar isn’t any exception. Males, particularly, can experience decreased testosterone manufacturing with extended Anavar use. This can result in quite a lot of signs, together with fatigue, temper adjustments, and decreased sexual want. One main use of anavar ends in bodybuilding is during a cutting part. Due to its ability to preserve lean muscle whereas selling fats loss, it helps bodybuilders to hold up bulk without sacrificing definition.
References:
http://www.innerforce.co.kr/index.php?document_srl=349640&mid=board_vUuI82
Большое спасибо, Много информация.
If people report any sort of joint pain on var it’s not var at all. I’ve always thought, why convey out the massive weapons like test before you begin with the light stuff like var, primo & tbol. I put 8 kilos on in 6 weeks on a var solely cycle whereas getting leaner. Backside line is 4 weeks of anavar will do little or no by means of positive aspects compared to a small check cycle. You can buy turinabol steroid from the highest reputable steroid websites. Anavar is a female-friendly steroid that not often produces virilization results, and the identical could additionally be for Tbol. Tbol is slightly more potent in nature so, Anavar is a safer compound for women, and it’s also used for medical remedy.
Such comparative studies provide the necessary info to make informed choices about incorporating Oxandrolone right into a bodybuilding regimen. Drawing a comparability between Oxandrolone’s results earlier than and after cycles can offer crucial insights into its impact on the body. Figuring Out the efficacy of any anabolic steroid, corresponding to Oxandrolone, is of paramount significance. Clinical information states introducing extra anabolic and androgenic steroids can help us bust through this plateau or taking a break from the mentioned steroid(s).
As you’ll find a way to think about, these impacts will critically harm your self-confidence. Respected suppliers aren’t going to risk fines promoting Anavar to gym-goers. If you want to get your palms on some, you’ll want to show to the black market. Without any government regulation, there is no telling what’s in these drugs. With Out the prescription, you could be going through serious consequences if you get caught with the drug.
Deca Durabolin also increases muscle fullness by increasing intracellular fluid quantity. We have found incidents of acne vulgaris to be extra prevalent on trenbolone as a result of excessive stimulation of the sebaceous glands. Additionally, we observe a better incidence of hair follicle loss on trenbolone compared to different anabolic steroids. This is the outcome of exponential increases in dihydrotestosterone (DHT) ranges. This is because their our bodies haven’t previously skilled such ranges of anabolism or protein synthesis. Consequently, a primary cycle ends in swift and vital adjustments in body composition. Nevertheless, the preliminary cycle can also be essentially the most deleterious as a result of customers not but developing a tolerance to such poisonous compounds.
In the Nineteen Eighties, this production has slowed considerably from strain from the FDA, and Anavar was taken off the cabinets in 1989. International markets then followed swimsuit, and Anavarlooks destined to be one other steroid to vanish. For years (and currently), girls select Anavar because it doesn’t cause any everlasting side effects and might be the most common anabolic steroid used by women presently. It supplies info on the most effective pure weight reduction dietary supplements, bodybuilding supplements and other natural aids to ensure holistic and complete physique health. Anavar is a gentle steroid and when taken in correct dosage, the unwanted side effects are quite manageable.
Advanced users may also contemplate stacking Anavar with different compoundsto synergize effects and achieve desired outcomes. Another sought-after consequence of the Check and Anavar cycle is fat loss. Anavar, in particular, has a reputation for being top-of-the-line anabolic steroids for chopping. This is because it has the flexibility to assist in lowering physique fat while sustaining muscle mass.
Clen is a wholly totally different kind of compound, so it acts in a very completely different means than steroid hormones. This cycle is for these already at a comparatively low body fat level (average weight or below). 15lbs of weight loss is feasible, depending in your food intake and exercise routine. An interesting conflicting effect with these two compounds is that Clen can lower your appetite while T3 can enhance it. You could notice no change to the appetite, however a rise in appetite from T3 can impact your results and requires extra willpower to stick with a fat-loss diet. A beginner’s Clenbuterol cycle introduces you to the compound and lets you gauge your body’s response to each the facet and optimistic effects. It’s additionally suited for ladies who use Clenbuterol alone and at decrease doses than men.
To get the best results from Tbol, you need to use 15 mg and 30 mg per day. This must be subdivided within the morning and night for a time period between eight to 12 weeks. Turinabol is essentially the most potent oral anabolic steroid with a unique historical past.
I’ve noticed that many males wisely don’t over-extend their Clen dosage. The maximum Clenbuterol dosage for females will not often exceed 100mcg day by day. Females will hardly ever take 120mcg of Clenbuterol, however a few of the more hardcore and experienced ladies have been known to succeed in that dosage. It just isn’t beneficial for the typical or beginner feminine Clenbuterol person. A starting Clenbuterol dosage for ladies will usually be 20mcg or 40mcg. It ought to then be increased each few days until you attain your desired most dose.
If you’re anxious about shedding any hair on Anavar/Testosterone – you possibly can complement with a DHT-blocking supplement similar to Finasteride or Noticed Palmetto. Or you can use a caffeine shampoo, which has proven to extend the lifespan of hair follicles in your scalp. A mixture of proteins and Amino Acids together with PeakATP is bound that will help you slightly in the muscle gaining endeavor.
References:
steroid bulk cycle (https://www.bridgewaystaffing.com/employer/anavar-female-before-and-after/)
We have discovered this to be a typical transformation when combining Anavar with weight training. However, this before and after is unrealistic if Anavar is taken by a sedentary individual. Today, gymgoers can purchase Anavar on the black market due to the difficulty of getting a doctor to prescribe it for something aside from a muscle-wasting illness. First – Anvarol is legal within the Usa for everyone, Anavar can only be purchased by individuals with a prescription and is by some means unlawful within the States. Anavar is certainly one of the Steroids that ladies use essentially the most and is least prone to trigger side effects. Anavar or Oxandrolone is understood for having very few unwanted effects, particularly because it lacks any Estrogen conversion, and it is pretty low on the androgenic score system – solely 24.
Typically, Anavar cycles for males can range from 6-8 weeks, whereas women may go for shorter cycles of 4-6 weeks. It is crucial to consult a healthcare skilled earlier than starting an Anavar cycle to ensure proper steerage and reduce the risk of side effects. Typically, Anavar ends in lean muscle positive aspects and improved muscle definition. However, the extent of transformation is dependent upon factors similar to particular person genetics, diet, and workout routine. To maximize Anavar’s potential for muscle features and fats loss, it’s important to maintain a well-balanced diet and monitor calorie consumption. An ideal food regimen for these taking Anavar ought to include high-quality protein, wholesome fat, and complicated carbohydrates.
The other very popular chopping steroid for women, next to Anavar, is Winstrol (Stanozolol). Anavar is probably certainly one of the few compounds I can confidently say is appropriate for newbies, intermediate, and advanced customers. Females love this one; actually, Anavar is essentially the most suited steroid a female could take, and I’ve seen countless numbers of women get a modern look whereas using it.
This permits us to gain perception into how different folks experience Anavar. It has a excessive anabolic score, however this doesn’t translate into powerful anabolic results that can rival those of true bulking steroids (which are virtually always injectables). Hopefully, nobody on the market thinks you’ll have the ability to take a steroid and then sit back together with your toes up, consuming chocolate cake all day, anticipating to rework into Vin Diesel magically. As lengthy as you’re willing to work for it, Anavar can and does deliver satisfying outcomes typically. I saved a reasonably good food plan along with them since, in any case, that’s 90% of the method. The energy enhance and strength retention combined with the slicing and water-shedding properties of Anvarol made for a fantastic combination. I used three pills per day for the first 2-3 weeks as directed on the label, however then I kicked it to 4 pills/day and ran the bottle out.
Power positive aspects achieved should have enabled a step-up in exercise intensity, resulting in a extra ripped and chiseled look. The outcomes for girls are somewhat parallel, albeit usually displaying even enhanced effects. They will probably see extra visible leanness, muscle definition, power increments, and a significant drop in physique fats.
As previously mentioned, Anavar is an costly steroid as a outcome of BTG monopolizing the market and driving the price up, costing sufferers $3.75–$30 per day, depending on the dose required. Bodybuilders generally purchase testing kits, enabling them to determine if their Anavar product is genuine. Anavar is superior, but expensive, since you want to take a lot for outcomes.
Anavar can influence mood and habits, leading to mood swings, elevated aggression, nervousness, or depression. If you discover any significant adjustments in your psychological well being whereas using Anavar, it’s essential to speak to your physician. If you’re already using Anavar and are experiencing unwanted facet effects, it’s necessary to seek medical assist.
This condition may be embarrassing and may require surgery to appropriate in extreme instances. Another facet effect males could experience is testicular atrophy, which is the shrinking of the testicles. This happens as a outcome of the body is not producing as a lot natural testosterone, resulting in a discount in the measurement of the testicles. While this condition is often reversible after stopping Anavar, it could be distressing for the affected individual. An Anavar cycle refers to the period throughout which a person takes the steroid, followed by a break. People use cycles to try to maximize the advantages while minimizing Anavar unwanted facet effects.
Women could not discover an enormous improve in dimension when measuring their muscles, because of a big discount in fat loss. Nevertheless, women will sometimes see an increase in body weight on the scales, despite burning an distinctive quantity of fats (indicating muscle gain). All anabolic steroids will skew levels of cholesterol in the incorrect course, with LDL (low-density lipoprotein) increasing and HDL (high-density lipoprotein) reducing. Some girls, could attempt to stack Anavar with other steroids corresponding to Winstrol to get higher outcomes. Even although they’ll truly get away with this stack (with a really small dose of Winstrol), growing Winstrol dosage additionally enhances the danger of virilization dramatically. One of the most vital Anavar results which is clearly not evident from the images above is the energy positive aspects that you’re prone to expertise when on an anavar cycle. The transformative energy of Anavar is evident in both photographic evidence and personal narratives.
In conclusion, whereas Anavar may offer some advantages for women, its potential for dangerous unwanted effects and authorized implications make it a risky alternative. Anvarol by CrazyBulk offers a safe and authorized alternative that may help ladies achieve their health goals without compromising their well being or breaking the legislation. Yes, Anavar can be utilized by itself, however it could not produce the best results in terms of muscle development and fat loss. Stacking Anavar with different steroids might assist to enhance muscle development and enhance fats loss potential. Anavar is thought to increase stamina and endurance, allowing customers to push themselves additional throughout workouts and physical exercise.
Typically individuals experience quick signs (in just one hour) but others could have to wait until they have fully retreated. Hair thinning or elevated male-pattern baldness in predisposed people is one other potential facet effect. It’s essential to observe for these indicators and search medical advice if they occur. The main concern we now have with clenbuterol is cardiotoxicity, with it potentially inflicting tachycardia.
References:
top steroid cycles (https://www.cvhub.lk/companies/anavar-effects/)
My website; https://t.me/cryptonetlake
Unlike men, girls don’t have to do PCT, so there’s nothing else to do as quickly as the cycle ends. It’s essentially the most tolerable and the least more doubtless to trigger virilizing signs at low to reasonable doses. For ladies first treading into the world of AAS, Anavar is kind of always the FIRST selection – and often the one selection for those desirous to keep away from virilization.
It is, however, rather more androgenic, as its affinity for binding to the androgen receptor is double that of testosterone12. Regardless Of this, Anavar has a really low androgenic score, and anabolic score three to 6 instances stronger than testosterone. All possible measures have been taken to make sure accuracy, reliability, timeliness and authenticity of the information; nonetheless Onlymyhealth.com doesn’t take any liability for a similar. Using any information supplied by the internet site is solely at the viewers’ discretion.
Anavar will enhance your endurance to an extent, with a noticeable ability to work out for longer and at a better intensity22. This is invaluable whereas cutting, the place you’ll wish to push your self with cardio workouts to burn fats. Like all AAS, Anavar will positively affect your restoration, dashing up tissue healing. With its identified advantages on collagen synthesis (after all, Anavar was initially developed to promote healing), it could cut back soreness and pain post-workout. Reputable suppliers often have certifications or accreditations that validate their legitimacy.
Understanding correct cycles, dosages, and post-cycle requirements ensures a secure and efficient expertise. Not Like many anabolic agents, Anavar has a relatively mild aspect effect profile, making it a viable possibility for both men and women. It minimizes the danger of common androgenic results, corresponding to excessive hair progress or voice deepening in ladies, whereas still delivering noticeable benefits in strength and physique composition.
For bodybuilders, there may be the will to look fit with out exposing themselves to well being implications and different dangers like extreme medicine unwanted side effects. This naturally conjures up the search for a more practical different to synthetic steroids. Established manufacturers within the anabolic steroid market often have a historical past of high quality and reliability. Research the brands which may be well-known and trusted inside the bodybuilding group. For those who don’t know, the primary two attributes of anavar is to burn fats and improve energy.
Hopefully, nobody out there thinks you possibly can take a steroid and then sit back together with your toes up, eating chocolate cake all day, expecting to rework into Vin Diesel magically. As lengthy as you’re willing to work for it, Anavar can and does ship satisfying results in most cases. There are a great quantity of dangers to long-term well being, some of which we’d not discover till much later in life. I’m not prepared to take that danger anymore, and that’s how I came across what I believe is the primary legal substitute for Anavar – Anvarol.
Anavar can contribute somewhat to some lean positive aspects, but for male customers, it’s impossible to be a reason for utilizing this steroid. Instead, the anabolic properties of Anavar are most dear for males in relation to MAINTAINING muscle when shedding fat. If you had to ask me right now what one of the best authorized various to taking steroids is, Anvarol is my answer. Take it from someone who HAS USED STEROIDS earlier than and may examine results!! This supplement is way easier on your pockets, body, and recovery than most different merchandise. One of the larger risks of oral steroids is how they’ll stress the liver, probably causing liver damage or poisonous hepatitis36. Anavar has a modification to its chemical construction, known as 17-a-alkylation modification, which allows us to use this steroid orally.
This medication might intrude with sure lab checks (such as thyroid operate tests), possibly inflicting false take a look at outcomes. Make sure lab personnel and all of your medical doctors know you use this drug. Inform your doctor when you turn out to be bed-ridden (unable to walk) for a chronic time whereas using this medication.
Thus, the hormonal lipolytic effects of Anavar may be preserved even when a person is sedentary post-Anavar cycle. Pharmaceutical-grade Anavar was once synthesized by scientists in a licensed laboratory when it was legal for medical causes. This was prescribed to sufferers affected by cachexia, the place muscle loss was occurring at an alarming rate, growing the danger of mortality. Testosterone ranges sometimes recover one to four months after Anavar cycle cessation.
This course of additionally inhibits glucocorticoid hormones, that means catabolic hormones, such as cortisol, are managed. With these hormones managed, fats achieve is halted and lean muscle can grow uninhibited. Anavar is a synthetic anabolic steroid that has been used by bodybuilders and athletes to increase muscle mass and strength. Anavar is certainly one of our favourite compounds as a half of a lean muscle acquire and fat loss stack (highly really helpful for comp prep).
Keep In Mind, managing unwanted facet effects is a proactive course of that requires responsible use, open communication with healthcare professionals, and self-awareness. By prioritizing your well being, monitoring your body’s response, and in search of steering when needed, you’ll find a way to decrease dangers and optimize the advantages of Anavar utilization. By following the following tips, you’ll have the ability to improve your probabilities of buying Anavar safely and acquiring a genuine, high-quality product.
References:
Keven Da Hulk Steroids, https://anime-share.ru/user/moenuscksn,
The enhanced glycogen storage that results from Anavar use is among the drug’s cosmetic advantages. Post-cycle syndrome impacts both men and women and is characterized by sexual dysfunction, lowered want, tiredness, and sadness. This adverse impact occurs in both men and women, though males have a considerably larger testosterone level than girls. Despite this difference, testosterone is essential for a woman’s libido, vitality, and total well-being. When paired with a bad life-style, taking extreme quantities of Anavar would possibly lead to unpleasant responses, a few of which may only become apparent during the user’s subsequent medical examination. When someone’s veins are visible just below the floor of their pores and skin, this is referred to as vascularity in the sport of bodybuilding. When seen from the skin, a person’s physique may seem to have the appearance of a street map due to the prominence of sure veins.
This is because the kidneys, and never the liver, are primarily answerable for metabolizing Anavar. Nevertheless, we discover this to be a smaller percentage compared to other C17-aa steroids. Nonetheless, it is essential to note, people should adhere to the recommended dosage and use the supplement responsibly to anticipate these kinds of transformations.
Females operating a primary Anavar cycle should begin very low to gauge unwanted effects. 5mg per day is thought to be well tolerated in scientific use by many feminine sufferers. If a lady tolerates this dose nicely, the next step is 10mg; many will find 10mg day by day to be the right balance. Nonetheless, more than a few women confidently use 15 or even 20mg day by day, which is able to enormously enhance the possibility of virilizing unwanted facet effects. One of the much less spoken-about advantages of Anavar is a possible boost to your overall temper. The same can’t be mentioned for lots of different steroids, which might probably trigger anxiousness and increased anger as an alternative.
The determination to make use of Anavar or any anabolic steroid is a private one which must be made with a full understanding of the potential risks and benefits. For women considering Anavar use, it’s essential to weigh the specified performance or physique enhancements towards the danger of doubtless everlasting virilization effects and different health considerations. Consulting with a knowledgeable healthcare supplier who understands efficiency enhancement can provide valuable steering and help monitor for any adverse effects. To mitigate these dangers, many users incorporate post-cycle therapy (PCT) after an Anavar cycle. PCT usually entails the usage of medicine like Clomid or Nolvadex to stimulate natural testosterone manufacturing and help restore the HPTA to regular operate. Some customers also embody hCG (human chorionic gonadotropin) in their PCT protocol to assist stimulate testicular function and potentially speed up recovery.
In contrast, the cost of anavar has been steadily declining during the last a number of years due to the fact that it is changing into easier to get. We currently reside in a day and age during which it’s potential, with just a little little bit of preparation within the form of analysis, to go surfing, place an order, and have some anavar sent proper to your door. Weighing the pros and cons of Anavar might help you make an knowledgeable choice about whether or not or not it’s right for you. Earlier Than taking Anavar, you will want to communicate with a medical professional to find out whether it is best for you. If you expertise any of those unwanted effects, you will want to contact your doctor instantly.
✔️ Minimal Estrogen Conversion (No Water Retention!) – Since Anavar doesn’t convert to estrogen, there’s no threat of bloating, gynecomastia (man boobs), or extra fat storage. ✔️ Enhances Nitrogen Retention—Nitrogen is a key muscle protein synthesis building block. The extra nitrogen your muscle tissue retain, the higher their capacity to get well and grow. John Mcdonald offers an outline of the unwanted facet effects of Anavar (Oxandrolone) in athletes. While not quite the identical, maybe think «Kleenex» quite than «facial tissue».
This modification allows the compound to stay energetic after ingestion, nevertheless it also implies that the liver should work harder to process the drug. This elevated liver stress can result in elevated liver enzymes, a typical indicator of liver strain or damage. The two major enzymes which are typically monitored are alanine aminotransferase (ALT) and aspartate aminotransferase (AST). Elevated ranges of these enzymes can point out that the liver is underneath stress and potentially struggling injury. Anavar, also called Oxandrolone, has turn out to be a preferred selection amongst bodybuilders and health enthusiasts looking for to reinforce their physique and performance.
You also can enhance the dose of Anavar additional time to compensate for the tolerance the body will begin to build if need be. Used by girls in low doses the place it turns into far less expensive than it does in men, it’s a staple throughout the elite athlete community and feminine bodybuilding circles. A safe and orally ingestible compound for females, it is utilized in doses of around 10-20mg every single day. To reduce the danger of virilization and other unwanted facet effects, ladies utilizing Anavar usually persist with decrease doses than males, usually in the vary of 5-20mg per day. Cycles are often kept shorter as properly, usually 4-6 weeks, with some users extending to eight weeks under cautious monitoring. It Is essential for women to start with the lowest efficient dose and improve steadily provided that necessary, all the time staying vigilant for any indicators of virilization. One Other important concern is the influence of Anavar on sperm manufacturing and fertility.
Anavar’s actual value exists where you’re already lean and where Anavar’s hardening and drying physique can showcase those previous couple of percentages of fat you’ve shed. Anavar helps construct muscle, will increase strength, and speeds up restoration. It’s additionally used medically to assist individuals regain weight after surgical procedure or continual illness. The changes in cholesterol levels brought on by Anavar can result in an increased threat of heart illness, heart attacks, and strokes. Men who have already got cardiovascular issues or are in danger for them ought to be particularly cautious when contemplating Anavar use.
In most cases, the results of Anavar become noticeable throughout the first two weeks of starting the cycle. Throughout this initial period, you may expertise a surge in each power and endurance, coupled with some initial gains in lean muscle mass. Even though Anavar is a very average steroid, it is nonetheless highly really helpful to have interaction in post-cycle therapy after utilizing any anabolic steroid. Trenbolone is a supplement that is often used during an Anavar decreasing cycle. Trenbolone, like Anavar, is a steroid that doesn’t aromatize and is not estrogenic, which signifies that it doesn’t create any problem for water retention. As a result, this mixture is a really efficient one for significant chopping demands in addition to for producing lean gains. The effects of taking 400 milligrams of Trenbolone acetate each week for eight weeks will compound considerably on those of Anavar.
The Anavar/Clen combo is nice enough to get you some impressive weight loss results. Maintain Clenbuterol to 50mcg daily and run it in 2 weeks on/2 weeks off sample. Here is a solid Anavar cutting stack that includes Clenbuterol and HGH. Anavar at 10mg/day for 6-8 weeks is nice, and also you in all probability won’t have any unwanted aspect effects. As for the best time to take Oxandrolone, break up it into two doses day by day at 5mg/each (once with breakfast and once more before bedtime).
Nevertheless, this stack may also produce a variety of the worst unwanted aspect effects among all steroids. Both are fast-acting; however, Anadrol 50 is an oral and trenbolone is an injectable. Additionally on Anadrol, the blood turns into extra viscous as a end result of a dramatic rise in pink blood cell count. Consequently, blood flow turns into impeded, making it easier to get out of breath. Due to the load gain on Anadrol, we regularly discover that cardiovascular activities can turn into more and more tough. He additionally recommends splitting up the doses of Anadrol throughout the day as a substitute of taking 25 mg in a single go. In comparison, Winstrol binds strongly to SHBG and consequently produces sturdy masculine side effects in ladies.
References:
https://dating.demo2.dedicatedhost247.com/@irwin845259229
Since it has the minimum unwanted aspect effects (provided you don’t exceed the limit) not that it helps in slicing and burning fats, even there are very rare possibilities of unwanted effects. Ladies might even go for the dose of 20 mg but it’ll tremendously improve their price of Virilization, therefore it’s recommended to not consume more than 10 mg most. The dosage for girls is 5-10 mg of Oxandrolone per day for ideally 4-5 weeks.
Nevertheless, Anavar is thought for its ability to help users maintain, and even acquire, muscle throughout a cutting part. Anavar tends to have a comparatively delicate anabolic effect in comparison with different steroids. For those that want to maximize their positive aspects, Anavar may be combined with Testosterone—a significantly stronger anabolic steroid. Testosterone is a naturally occurring hormone in the physique that performs a vital role in sustaining general well being and promoting muscle development. Whereas deciding on the dosage, additionally be aware of the potential benefits and be prepared to adjust accordingly. Though this steroid provides numerous advantages compared to different anabolic steroids, it’s essential to recognize that these advantages don’t make you immune to potential risks. Positive outcomes are achievable, but it’s important to stay vigilant and aware of your body’s wants.
Deciding on a model new stack can be difficult, with the numerous choices out there and the plethora of opinions on which is finest. An intriguing stack known for its potent results and dramatic outcomes – it’s a pairing that’s brought on quite a stir within the bodybuilding community. Anavar’s half-life is relatively short, and it is usually taken in two day by day doses.
This is very true contemplating how frequently it is counterfeited and substituted for methandrostenolone on the black market (Dianabol). The effects of Anavar on the female body might be considerably stronger, even at significantly lower doses, than those utilized by men to get the same outcomes. For girls, a day by day dose of 10 mg might be extremely helpful for decreasing body fat and constructing muscle mass. Some athletes and bodybuilders expertise lack of muscle mass once they eat fewer calories than they expend. Generally you’ll see males or ladies on stage who appear extraordinarily slender and shredded but have misplaced a large amount of muscle mass in the weeks main as a lot as an occasion.
The final effect listed above, fat burning, is what separates this steroid from a lot of the other testosterone-based medication. For these unaware, every week we’ve a specific steroid or PED up for dialogue. The objective of these threads is to generate dialogue about the posted compound and get a extensive variety of user experiences and feedback about it. These threads are extremely useful as an archive for new users, and for experienced customers researching a brand new compound. This is all anecdotal, in fact, and you should take these evaluations with a grain of salt. I hate consuming, and through cycle I typically had shit days the place I did not get enough calories or protein in any respect. My day is packed, so typically it feels good to only not care and just go to sleep.
Anavar, however, does trigger both of those unwanted effects, based mostly on our patients’ labs, rising the chance of myocardial infarction and hepatic injury. Anvarol is FDA-approved and secure for men and women to take all 12 months, as it doesn’t harm the HPTA (hypothalamic pituitary testicular axis) and suppresses pure testosterone levels. We recommend to start of by taking 5mg of Anavar per day for three to 4 weeks, and look how this anabolic steroid works out for you. Depending in your response to the Anavar, you’ll find a way to keep including extra to the dosis in the course of the remainder of your cycle. A liver help complement is essential when stacking Anavar with other hepatotoxic orals, similar to Winstrol, Anadrol, or Dianabol.
A well-structured exercise routine is crucial for optimizing Anavar’s outcomes. Incorporating a combination of weightlifting, cardiovascular exercise, and stretching may help improve its effectiveness. Now that the usage and advantages of Anavar have been mentioned, it’s time to contemplate setting achievable goals for your Anavar transformation. Misusing Anavar can lead to significant and severe unwanted aspect effects that will necessitate medical intervention.
While Anavar’s impression on muscle improvement, fats burn, and vascularity are quite noticeable, there are less obvious but equally significant transformations that one might experience. These transformations extend past the realm of physical modifications and likewise enterprise into how Anavar accompanies its users in their fitness pursuit. After commencing an Anavar cycle, initial adjustments can be perceived as early as two weeks in. Facet effects are a transparent sign that your physique is under pointless strain which immediate attention is required to prevent harm.
Understanding how Anavar stacks up towards different compounds is essential for people trying to make knowledgeable selections about their performance-enhancing drug utilization. The following desk presents a comparative evaluation, highlighting key differences and benefits of this steroid compared to different generally used steroids. Anavar is entirely lawful for personal consumption, but it can pose legal points if obtained for resale, as this violates its intended use. Many people favor purchasing it on-line from reliable sources, even and not using a prescription.
Results can range, however some people have reported seeing improvements in muscle definition, vascularity and total body composition within simply two weeks of use. One crucial facet of managing hormonal balance is monitoring estrogen levels. Though Anavar use won’t cause a significant enhance in estrogen, it is nonetheless important to keep it in verify as an extra can lead to unwanted effects corresponding to water retention and gynecomastia. Moreover, regulating cortisol levels is vital for stopping muscle breakdown and selling fats loss during PCT. During the initial phases of an Anavar cycle, you might discover gradual effects. However because the cycle advances, expect to see a more noticeable discount in body fats, heightened muscle improvement, elevated power, and improved stamina. In The Course Of the conclusion of the cycle, important adjustments in physique composition, including enhanced muscle definition and an overall improved physique, may turn out to be obvious.
It is important to do not forget that simply since you aren’t bloated like you can be on Dianabol doesn’t mean the compound just isn’t working. It is a a lot leaner compound than others, and you will solely acquire dry and lean muscle. DHT steroids cannot work together with the aromatase enzyme to transform into Estrogen. This means Anavar is an extremely lean compound and will only provide you with good and lean features. The outcomes you will expertise depend upon various variables like diet, coaching, genetics, etc. It can be best to stay the healthiest way of life you’ll be able to whereas additionally consuming plenty of protein and energy if your aim is to achieve muscle.
The above transformation is typical for a steroid-newbie, who’s doubtless used Dianabol or Testosterone. One cycle of steroids leads to a achieve of roughly 15-25lbs and users will discover features thick and quick. Winstrol is another steroid utilized by those seeking to lose weight or cut for the summer season. Again, that is an unlawful compound that will have fairly a number of unwanted effects. Anabolic steroids are very effective for building muscle mass; nonetheless, it is essential to perceive the role that genetics, vitamin, and workouts additionally contribute to a person’s transformation. Currently, 1 million individuals in Britain are believed to be taking steroids (6), and as a lot as 4 million of the US population (7).
References:
best oral steroids for cutting; https://gitea.uchung.com/nganhinds03270,
In that case, you will need to do some type of applicable post-cycle remedy related to the opposite PEDs getting used. T3 is one other compound used for fat burning, which is commonly stacked with Clenbuterol. Due to this, this stack is most frequently utilized by girls who are extra concerned with burning fats than retaining muscle mass. Using Clenbuterol for the primary four weeks of this 8-week stack offers a quick head begin to fats burning and slicing, with Winstrol’s powerful results taking you through to the end of the cycle. The maximum Clenbuterol dosage for females will hardly ever exceed 100mcg day by day. Females will not often take 120mcg of Clenbuterol, however a variety of the extra hardcore and skilled girls have been recognized to succeed in that dosage.
Over a decade in the past, Clenbuterol was touted as a weight reduction wonder drug that was promoted as having the ability that can assist you drop fat without having to do a factor. Celebrities promoted it and became in style with anybody and everyone who wished to shed weight, including those who needed a solution that didn’t contain food plan or train. The recommendation is that the dose is slowly increased over about two weeks, adopted by a break after which a continuation of the cycle when you choose to continue. Some potential extra extreme problems are female-specific, though.
In conclusion, utilizing Sustanon Anavar Cycle may help you obtain your fitness targets, but it may be very important use it responsibly and follow the rules to keep away from any unwanted aspect effects. If you are contemplating incorporating Anavar into your health routine, timing performs an important function in maximizing its effectiveness and attaining your required targets. Whether Or Not you’re aiming for enhanced muscle development, improved athletic performance, or fat loss, understanding when to take Anavar could make a significant difference.
This is as a result of Anavar has a half-life of round 9 hours, which means that it will be out of your system relatively quickly. Starting PCT immediately will help to restore your pure testosterone levels and prevent any potential unwanted aspect effects. Anavar works by growing protein synthesis within the physique, which finally ends up in a rise in muscle mass and energy.
The dosage, results and side effects all are depended on a person. For seasonal bodybuilders, it serves as a non-bloating drug that can assist them in weight loss. And for some bodybuilders, it might give a little enhance to their journey with minimal suppression. You need to resolve if it’s something that resonates with your fitness objectives. It’s known to aid in burning physique fat, especially within the abdominal area. In Accordance to one group of individuals, it’s so as a result of steroid builds muscle and since you have to practice and following correct food regimen plan, therefore you look leaner. Even children can use it because the therapeutic dosage, as its delicate; nonetheless, for bodybuilding purposes, the standard dosing would be futile.
Establishing an optimal Oxandrolone cycle frequency holds equal significance to figuring out the proper dosage and duration. Partaking in excessive or consecutive cycles could lead to undesired outcomes and potential well being points. It is important to search out the right equilibrium to maximise benefits while minimizing dangers to total well-being.
During this time, the individual takes Anavar every day in a specific dosage – extra on this directly below. Some people additionally use other supplements or medicine through the cycle to enhance the results or to assist with recovery afterward. Nonetheless, biking without proper medical steerage may be dangerous and lead to dangerous unwanted effects. It is an artificial form of testosterone, the male hormone answerable for muscle development and different masculine traits.
A generally beneficial starting point is between 5 to 10 milligrams per day. Anavar, regardless of its reputation, continues to be a potent substance, and slightly can go a great distance in producing results for ladies without introducing harsh unwanted effects. An superior Anavar cutting cycle can also last between six to eight weeks, though some experienced users may prolong this era. However, longer cycles ought to be attempted with warning, as they might put the body underneath further pressure.
It belongs to a category of drugs referred to as androgens, that are syntheticversions of the male intercourse hormone testosterone. It is considered a mild anabolicsteroid, that means it has less potential for androgenic side effects compared toother steroids. It is primarily used in medical settings to promote weight gainand muscle preservation in situations like extreme burns, muscle wastingdiseases, and post-surgical restoration. In order to obtain maximum outcomes from Anavar, customers ought to pay close consideration to their food plan and train routines. Focus on consuming a well-balanced diet to assist muscle development and fat-burning. Correct hydration and common cardiovascular exercise will also help to additional decrease physique fat proportion.
Keep In Mind to seek the guidance of with a healthcare professional before starting any new complement routine. With Anavar and Turinabol, we typically see a reasonable drop in testosterone, with levels often recovering to natural peak levels several weeks post-cycle. This is sort of unique for oral steroids, which usually have harsher results on ldl cholesterol because of their stimulation of hepatic lipase, a liver enzyme that negatively impacts HDL ldl cholesterol. Nevertheless, both compounds will trigger reductions in subcutaneous fats mass while limiting water retention.
Some individuals will experience unfavorable impacts, principally joint ache, complications, and flu-type signs. Some individuals won’t experience any unfavorable results in any respect when utilizing HGH. Extra severe unwanted effects are more likely to happen at very high doses or when HGH is used frequently for years, and that is to be prevented. Testosterone will improve muscle mass, reduce fats, and considerably enhance restoration. Positive Aspects of 20 lbs are attainable, and water retention ought to be controllable through food regimen (low sodium).
References:
https://trade.thaitechphp.com/@fletalittle68
Also visit my web-site Watch Free Poker Videos & TV Shows
My web site https://firsturl.De/
Here is my web site; Stakes Casino
When combined with a proper food regimen and exercise routine, Anvarol and Anadrole can help you achieve your required physique with out compromising your health. Finally, the liver is a very resilient and self-healing organ (8) that usually takes much abuse to have the ability to fail, which Anavar is unlikely to cause by itself. However, precautions and regular monitoring of liver enzymes stay essential. We have discovered that supplementing with TUDCA can even alleviate hepatic strain when taking orals like Anavar. We have found Anavar to be a potent muscle-builder; nevertheless, it’s not going to remodel the typical girl right into a 200-pound man (like some might believe). Each Anavar and Winstrol can be found for purchase as authorized options. Each merchandise, offered beneath dietary dietary supplements as long as they’re absent of the banned elements stanozolol and oxandrolone.
You must acquire a prescription so as to legally buy Anavar and the acquisition must be made from the pharmacy. Many nations around the globe carry comparable laws, at the same time many are far more lenient; understand the legislation because it pertains to where you reside earlier than a purchase is made. Regardless of the place you live, if top quality anabolics are what you’re after and also you wish to keep within the safety of the regulation, you are inspired to take a glance at the sponsors right here at Steroid.com. You will discover these sponsors carry high quality, prime shelf anabolics that may be purchased legally with no prescription and that current no concern as it pertains to a legal violation. Developed within the Nineteen Sixties and FDA-approved, Anavar is an anabolic steroid used for selling muscle growth, bone growth, and weight acquire. Like males, women are also in danger for cardiovascular issues when using Anavar. The modifications in cholesterol levels caused by Anavar can result in an increased risk of heart disease, coronary heart assaults, and strokes.
Anavar is an oral steroid, thus a few of the drug has to cross via the liver before getting into the bloodstream. This could cause some stress on the liver, nonetheless, this impact is considered delicate, because of the steroid also being metabolized by the kidneys. This testosterone-suppressing impact nevertheless is more doubtless to be mild, with endogenous testosterone levels usually recovering in a matter of weeks or a couple of months. Anavar is a comparatively delicate steroid, in comparison with other AAS corresponding to trenbolone or anadrol. However, anavar’s a banned substance and is in opposition to the law to purchase in lots of countries – without a prescription (including US and UK). Those like Lee Priest or outspoken bodybuilder ‘Aarron Lambo’ who are not afraid to talk up and reveal a few of the darker secrets of the bodybuilding world.
If your physique fat may be very high (or you’re a higher-weight person), it’s ideal to try to lose as a lot weight as potential earlier than using a steroid – do not neglect that Anavar isn’t a weight reduction miracle drug. Ideally, it could be greatest to already be round 15% physique fat earlier than utilizing Anavar. There usually are not many steroids that females can use without experiencing severe side effects that mostly involve the event of assorted masculine bodily traits. This outcomes from providing the physique with significantly larger amounts of male androgen hormones like testosterone and DHT than would otherwise be produced.
Now you can imagine the effects you’d get in case your Anavar had been changed with Dianabol – and it’s even worse for females as a result of anything aside from Anavar isn’t going to be as tolerable. Hopefully, nobody on the market thinks you can take a steroid after which sit again with your toes up, eating chocolate cake all day, anticipating to rework into Vin Diesel magically. As long as you’re keen to work for it, Anavar can and does deliver satisfying results generally. I stored a reasonably good diet along with them since, in any case, that is 90% of the process. The power boost and energy retention combined with the slicing and water-shedding properties of Anvarol made for a fantastic mixture. There are a great number of risks to long-term health, some of which we would not discover until much later in life. I’m not prepared to take that danger anymore, and that’s how I got here throughout what I consider is the number one authorized substitute for Anavar – Anvarol.
Helps pure testosterone production, balances adrenal output, and helps reestablish hormonal rhythm. Correct PCT after Anavar ensures that you simply keep your hard-earned positive aspects, normalize hormone ranges, and protect long-term health. Not Like testosterone, which is irreversibly converted by the enzyme 5α-reductase to 5α-dihydrotestosterone (DHT) or by aromatase to estradiol, Anavar doesn’t undergo aromatization to estrogen. This means it doesn’t convert into estrogenic metabolites, significantly lowering the danger of unwanted effects corresponding to water retention or gynecomastia (Handelsman, Endocrine Reviews). Clinical data states introducing extra anabolic and androgenic steroids might help us bust through this plateau or taking a break from the stated steroid(s). This isn’t the one way; changing your food plan and likewise coaching fashion will help. You can stack Anvarol with different CrazyBulk dietary supplements to help you reach your fitness objectives even quicker.
If you’ve never used Anavar before, it’s beneficial that you begin with a lower dosage to evaluate your tolerance and response to the drug. A typical beginner’s dose is 30mg per day, taken for a interval of 6-8 weeks. When it comes to using Anavar, males ought to method the drug with caution due to its potential unwanted effects. Nonetheless, if used responsibly and in accordance with really helpful dosages, Anavar can be an efficient software for achieving particular health targets. It is necessary to note that Anavar usage for athletic functions is usually mixed with different substances, similar to testosterone or other performance-enhancing drugs. Nonetheless, it is essential to use caution and search professional steering when combining substances to minimize the risk of adverse effects.
The solely path for most of us looking to purchase Anavar is from an underground lab. Sometimes, they even embody cheaper compounds, like Winstrol or Dianabol, and even ingredients that aren’t even steroids. Anavar is particularly good at getting rid of fats in more stubborn areas, and for girls, that is usually across the thighs and buttocks.
But if you absolutely need to make use of Anavar, you ought to be conscious of the potential risks. Moreover, should you’re a person with low testosterone ranges, Anavar could be a good possibility. However, if you determine to make use of it, monitor your blood strain closely and discontinue use when you start to expertise any sign of it.
If a person has no preference and equally wants to build muscle and burn fats at the same time, maintenance energy may be optimum. As previously talked about, Anavar is an expensive steroid due to BTG monopolizing the market and driving the value up, costing patients $3.75–$30 per day, depending on the dose required. Anavar produces great results, particularly in terms of strength and pumps. Take 3+ grams of fish oil and do your cardio, and ldl cholesterol shouldn’t be a problem, even when you’re sensitive to your lipids. Nevertheless, I wasn’t diligent enough to take fish oil and liver support. I took a break and pulled blood again, and my lipids had improved significantly.
References:
what is gear steroids — https://portal.shcba.org/employer/anavar-venta/,
Here is my site Highstakesweeps online
Hello! I’m at work surfing around your blog from my new iphone
4! Just wanted to say I love reading through your blog and look forward to all your posts!
Carry on the fantastic work!
Here is my web site: Poker High Stakes
my homepage; Highstakes Poker
Here is my site :: Free Poker
Here is my web blog — Lynette
Feel free to visit my web page — Free Poker
Have a look at my site: Watch Free Poker Videos & TV Shows
Asking questions are in fact good thing if you are not understanding something fully, except this paragraph presents fastidious understanding even.
my web site: HighStakesDB
Feel free to surf to my web blog: Mybreakers-Experience.Com
Feel free to surf to my web site PokerTube — Watch Free Poker Videos & TV Shows
Feel free to surf to my web site :: PokerTube — Watch Free Poker Videos & TV Shows
My web page PokerTube — Watch Free Poker Videos & TV Shows
Feel free to surf to my homepage: Poker online
Feel free to visit my page :: Artistgretchenscharnagl.com
Also visit my site … highstakesweeps
Feel free to visit my web-site: http://Lairdburns.Com
Here is my blog post :: High Stakes
My blog; https://cryptominerspro.com/
Feel free to visit my web blog high Stakes download link http dl highstakesweeps com
my webpage: pokertube — watch free poker videos & tv Shows
my blog :: Dewey
Also visit my webpage: PokerTube — Watch Free Poker Videos & TV Shows
my webpage; Watch Free Poker Videos & TV Shows
Adicionalmente, las altas concentraciones en circulación de testosterona pueden causar marcados cambios en la histología del tracto genital, y una sobre regulación de la expresión andrógeno receptora del ovario, y criterios patológicos consistentes para el diagnóstico de ovarios poliquísticos. En resumen, los esteroides para mujeres pueden ofrecer beneficios en el aumento de masa muscular, pero vienen acompañados de riesgos significativos. Los efectos secundarios pueden incluir cambios en la voz, acné y distensión stomach. Es essential entender que el uso de esteroides debe ir acompañado de un profesional de la salud, ejercicio y una alimentación adecuada.
Los esteroides pueden provocar ginecomastia al elevar los niveles de estrógeno en el cuerpo. El uso de esteroides suprime la producción natural de testosterona, lo que da lugar a niveles más altos de estrógeno. Los niveles elevados de estrógeno pueden provocar el crecimiento anormal del tejido mamario, lo que resulta en ginecomastia. Sin embargo, esto no es lo mismo que la testosterona verdadera, por lo que agregar una forma exógena de testosterona mientras toma Winstrol es fundamental para evitar los efectos secundarios de la testosterona baja, como la libido baja y otros problemas de salud más graves. Recuperar la producción natural de testosterona es un proceso lento que lleva meses; razón por la cual la terapia submit ciclo (PCT) es fundamental para que pueda obtener una función hormonal regular y niveles elevados de testosterona más rápidamente. Las mujeres que usan Winstrol deben ceñirse a 5 mg / día y vigilar cuidadosamente los efectos secundarios.
Además, si quieres mantener ese nivel muscular, debes seguir consumiendo las drogas, porque al momento que dejes de consumirlas, vas a perder todo lo ganado. En cambio, si te vas por el camino largo (y saludable), las cosas son un poco complicadas, pero al final de cuentas, son mucho menos complejas que utilizar esteroides. Además, según el Departamento de Endocrinología y Nutrición de la Clínica Universidad de Navarra, indica que un médico puede recetar corticoides únicamente después de analizar el factor riesgo-beneficio al tratar la enfermedad [29]. Estos corticoides son similares a las hormonas que producen las glándulas suprarrenales. En el mismo estudio del 2000 [28], se encontró que 43% de usuarios de drogas anabólicas, experimentaron acné severo. La ginecomastia es el crecimiento de tejido de las glándulas mamarias en el hombre.
La práctica de utilizar bloqueadores de este tipo, como el clomifeno y tamoxifeno, es común entre los usuarios de esteroides anabólicos para lograr recuperar la función testicular, luego de un ciclo de uso del anabolizante. Los esteroides anabólicos son sustancias adictivas que los atletas toman para estimular la fuerza y aumentar la masa muscular. Los hombres lo usan para cortar ciclos de modo que puedan quemar su grasa corporal y hacer que los músculos sean más duros, pero Winstrol responde de manera diferente a las mujeres.
La mayoría de los principiantes solo buscarán incluir testosterona en una pila con EQ, para combatir la naturaleza supresora de Boldenone. Pero la testosterona también servirá para proporcionar algunas ganancias de masa, siempre que el principiante sea capaz de controlar adecuadamente los efectos secundarios estrogénicos que ocurrirán con esta dosis. Se puede usar para varios objetivos, pero uno de los más comunes es usar Boldenone en un ciclo de corte y, en estos casos, es mejor usarlo al comienzo de un ciclo, donde otros esteroides, particularmente aquellos que no aromatizan en todos – luego se continúan durante un período más largo. Masteron o Trembolona son opciones de apilamiento populares cuando se usa EQ para cortar. A continuación se muestran algunos ciclos de ejemplo que cubren diferentes niveles de experiencia con esteroides. Con todo, si bien estos beneficios de rendimiento pueden no ser demasiado notables cuando Equipoise se combina con esteroides mucho más potentes, aún contribuyen a los efectos generales de cualquier ciclo de esteroides que esté ejecutando.
Las mujeres con un capuchón demasiado grande podrían sentir más dolor en los encuentros sexuales además de una pérdida de sensibilidad de la zona erógena. Ariel también coincide en que los ciclos son cada vez una opción más accesible para gente muy joven. «Niños de 14, 15, 16 años en el gimnasio vienen a hablar contigo, te preguntan que cómo hacerlo, dónde consigues…», declara.
Además, el estanozolol es uno de los pocos esteroides anabólicos que pueden usar las mujeres con un menor riesgo de efectos secundarios en dosis mínimas. Incluso si es seguro, las mujeres deben saber cuál es el mejor momento para usarlo para reducir la grasa corporal y ganar músculos más duros y fuertes. Por lo tanto, el artículo contiene la valiosa información relacionada con los esteroides anabólicos para mujeres. Esto implica tomar múltiples dosis de esteroides durante un periodo de tiempo específico, parar durante un tiempo y volver a empezar. Este artículo describirá los mejores esteroides anabólicos para mujeres, incluida la información de dosificación y la información de dosificación. Pueden usar esteroides anabólicos suaves como Anavar, Winstrol, Clenbuterol y Primobolan.
Los aparatos reproductores masculino y femenino se desarrollan durante el embarazo y el desarrollo del feto respondiendo a la influencia de hormonas femeninas (estrógeno) o masculinas (testosterona). Cuando una mujer padece hipertrofia del clítoris se debe a que sus niveles de andrógeno (hormona que provoca la aparición de los caracteres secundarios masculinos) son muy altos. Si no descienden estos niveles puede causar que los genitales externos se masculinicen haciendo que el clítoris se alargue. Durante la excitación sexual el clítoris podría alargarse como cuando un hombre tiene una erección. Esto se debe a que en condiciones normales durante la excitación el clítoris se agranda, pero si ya de por sí es más grande de lo regular podría verse incrementado en la excitación.
Por ejemplo, los investigadores están intentando identificar biomarcadores que puedan cuantificar el dolor de las mujeres y acelerar el desarrollo de nuevos tratamientos. Aunque cada año mueren más hombres que mujeres por sobredosis de opiáceos sujetos a prescripción médica, las muertes entre las mujeres han aumentado un 642% desde 1999, frente al 439% entre los hombres, según los NIH. «Como las mujeres tienen cierto grado de deficiencia de recompensa, son más propensas a la adicción y a la sobredosis de opiáceos», dice Baxter.
Este esteroide tiene la menor tasa de virilización de todos los esteroides anabólicos, y además, brindará el mínimo rasgo que una mujer pueda alterar con la suplementación. Si bien estos factores juegan un papel importante, sin los esteroides anabólicos y una gran cantidad de otras drogas para mejorar el rendimiento, el físico femenino tal como lo conocemos hoy en día en la cultura in style no existiría. Cuando se toman por prescripción médica, cualquier cese en el consumo debe ir supervisado también por un profesional sanitario y hacerse de forma progresiva. Ciertos alimentos que nos aportan vitaminas, minerales o determinadas grasas contribuyen a la síntesis de esteroides, como la testosterona.
Se recomienda el tratamiento con metadona o buprenorfina para las mujeres embarazadas que presentan trastorno por consumo de opioides. El tratamiento con buprenorfina puede dar mejores resultados de salud para los lactantes que el tratamiento con metadona. Anavar es levemente tóxico para el hígado en comparación con otros esteroides anabólicos, por lo que cuando usa la dosis recomendada y realiza la duración correcta del ciclo, no causará ningún daño hepático grave o toxicidad. Sin embargo, los usuarios pueden usar suplementos tóxicos para el hígado como la protección del hígado o LIV-52 durante el ciclo de Anavar, que protegerá su hígado de diversos daños y enfermedades. Para mitigar los efectos adversos de la oxandrolona en pacientes femeninas, se recomienda supervisión médica constante, dosis bajas y un ciclo corto de tratamiento, además de monitorear los niveles hormonales y realizar exámenes periódicos de salud. En resumen, los profesionales en la salud deben estar informados sobre los posibles efectos secundarios de la oxandrolona en mujeres, para poder brindar una atención integral y segura a sus pacientes. La vigilancia constante y la educación sobre los riesgos asociados con este medicamento son clave para prevenir complicaciones y garantizar el bienestar de las mujeres que lo utilizan.
Entre otras cosas, se ha observado que los consumidores de estos suplementos tienden a ingerir otras drogas de abuso. Durante el primer ciclo de esteroides, las personas pueden sentirse como verdaderos personajes de Marvel con músculos de acero así como sentir un incremento en la potencia de su actividad sexual. Hacia el last del ciclo, los efectos secundarios de los esteroides aparecen y el crecimiento muscular se detiene. Los esteroides anabólicos permiten aumentar el volumen de la masa muscular al alto precio de contraer todo tipo de trastornos en la salud. Los esteroides anabólicos son variaciones sintéticas de la hormona sexual masculina – la testosterona. Estos compuestos son capaces de aumentar la testosterona en sangre de forma significativa. El efecto secundario más común de los esteroides anabolizantes en las mujeres es la virilización.
References:
where to get Steroids bodybuilding; https://mastercare.care/employer/clenbuterol-en-venta/,
La velocidad y la magnitud del aumento están directamente relacionadas con las dosis. Los pacientes que toman dosis fisiológicas tienen un crecimiento lento y a menudo imperceptible; los que toman megadosis pueden aumentar el peso corporal magro varias libras por mes. Los aumentos en el nivel de energía y la libido (en los varones) aparecen, pero son más difíciles de cuantificar. Los esteroides anabólicos incluyen la testosterona y todos los fármacos química y farmacológicamente relacionados con la testosterona que favorecen el crecimiento muscular; se dispone de numerosos fármacos.
Sin embargo, en los últimos años, la técnica subq se ha hecho cada vez más popular. Desafortunadamente, este método puede ser usado para dar un máximo de 0.5ml en una inyección. De lo contrario, se forman burbujas bajo la piel, similares a la mordedura de un insecto (desaparecen después de una semana).
En el contexto de Tu espacio de lectura y aprendizaje basic, los diferentes tipos de esteroides incluyen los esteroides anabólicos, los corticosteroides y los esteroides sexuales. Los esteroides anabólicos se utilizan con fines médicos para tratar afecciones como la falta de crecimiento en adolescentes y la pérdida de masa muscular en personas con enfermedades crónicas. Sin embargo, su uso indebido puede tener efectos secundarios graves, como daño hepático y cardiovascular, alteraciones hormonales y afectar el desarrollo en adolescentes. Los corticosteroides son antiinflamatorios y se utilizan para tratar enfermedades como el asma, la artritis y las enfermedades autoinmunes. Su uso prolongado puede causar efectos secundarios como aumento de peso, osteoporosis y supresión del sistema inmunológico. Los esteroides sexuales, como los estrógenos y la testosterona, están involucrados en el desarrollo sexual y la reproducción. En resumen, los esteroides tienen usos médicos legítimos, pero su uso indebido puede tener consecuencias graves para la salud.
El resto viene de los mayores fabricantes europeos, así que la calidad también debería ser buena. Esta sustancia contrarresta, entre otras cosas, la atrofia de los testículos, facilitando así el PCT. En caso de un ciclo basado en la testosterona y que dure menos de 20 semanas, no hay necesidad de hacerlo. La mejor manera de comprobar los niveles hormonales es, por supuesto, hacer un análisis de sangre. En mi experiencia, puedo decir que las personas en el primer ciclo son a menudo hipersensibles y se dicen a sí mismos los síntomas mencionados.
Y es que aunque el cortisol es una hormona vinculada al estrés, también presenta una serie de efectos de gran relevancia para el mantenimiento de nuestra salud. Los beneficios perseguidos con su consumo son fundamentalmente mejoras en la composición corporal (reducción de grasas y aumento de la masa muscular magra), e incrementos en la fuerza y la potencia. Aunque estos se administren por vial oral o inyectándolos intramuscularmente, su actuación sobre el organismo es la misma que las hormonas sintetizas y secretadas por el mismo cuerpo humano. La testosterona, a su vez, es una hormona sintetizada en el cuerpo a partir del colesterol, es decir, comparten su misma estructura química, son un ciclopentanoperhidrofenantreno (3 ciclohexanos y 1 ciclopentano) (1). En este artículo hablamos de la trembolona, no sólo de sus beneficios, sino también en sus contras, un poco de su historia y como minimizar los efectos secundarios. El uso de esteroides anabólicos en el deporte está penado en las reglas antidopaje y puede resultar en la descalificación de los atletas y la pérdida de títulos y medallas.
En 1964 en los JJOO de Tokio, estaba tan extendido su consumo que se convirtieron en un serio problema. Numerosos entrenadores y atletas, establecieron sus propias formas de suministro al margen de cualquier management médico o fundamento. En este orgánulo el ARNm será traducido y dará lugar a la síntesis de las proteínas estructurales de las fibras musculares, provocando el aumento de las mismas. El Winstrol es un potente esteroide constructor de masa muscular magra y definida. Los expertos mencionan que los esteroides son relevantes para el cuerpo, pues son los responsables de regular los procesos vitales en diferentes áreas, como el metabolismo, el crecimiento, el estrés y la inmunidad. Después de saber qué son los esteroides, posiblemente te preguntes cuál es su funcionamiento en el organismo y qué tan fundamentales son para nuestra salud.
En este caso, usted podrá volver a su límite genético dentro de unos pocos meses después de dejar de usar AAS. Por supuesto, causa la pérdida de cabello sólo en las personas que tienen una tendencia a la pérdida de cabello. Tenga en cuenta que las hormonas no son dulces, y si las usa de forma imprudente, puede que se arrepienta de esta decisión en el futuro. Por cierto, vale la pena señalar que no hay consecuencias legales por comprar o poseer esteroides para tu propio uso. En la primera situación, te sugiero que te acerques al tipo más grande del gimnasio y le pidas consejo. Desafortunadamente, muchos esteroides son falsos, y no es raro recibir un producto de mala calidad tanto al comprar a un amigo como en línea. A continuación hay dos fuentes que he comprobado y de las cuales compro esteroides cuando estoy en el extranjero.
Uno de los tipos de corticoesteroides más conocidos, si no el que más, es el los glucocorticoides. Dentro de este grupo encontramos sustancias principalmente dirigidas al management de procesos inflamatorios. Los corticosteroides o corticoides son un conjunto o grupo de fármacos que producen un efecto semejante al del cortisol secretada por la corteza suprarrenal.
La testosterona también puede estimular el crecimiento de los tejidos musculares, lo que es beneficioso para los pacientes que han sufrido daño muscular durante la cirugía. Las hormonas esteroides naturales son generalmente sintetizadas a partir del colesterol en las gónadas y glándulas suprarrenales. El cuerpo produce esteroides de manera pure para facilitar algunas funciones como combatir el estrés y promover el crecimiento y el desarrollo. Pero algunas personas usan esteroides en forma de píldoras, geles, cremas o inyecciones porque creen que estos pueden mejorar su rendimiento deportivo o su aspecto físico. Cuando se habla de esteroides muchas personas los relacionan con ayudas ergogénicas, trampa o ventajas injustas.
Estas vitaminas tienen importantes beneficios para la piel y la salud en common. La vitamina E es un antioxidante que protege a las células del daño de los radicales libres, lo que ayuda a prevenir el envejecimiento prematuro y cut back el riesgo de enfermedades crónicas. Por otro lado, la vitamina A es esencial para la salud visual, la función inmunológica y la salud de la piel y las membranas mucosas.
Sin embargo, es una sustancia muy fuerte y no debe ser usada por principiantes – es muy fácil de bajar los niveles de estradiol prácticamente a cero. A menudo se utiliza para revertir la ginecomastia (si no tiene más de seis semanas). Además, las hormonas están todavía en un nivel muy alto, por lo que la formación de músculo no debería ser un problema si entrenas y comes adecuadamente. La PCT usualmente comienza después de 3-4 tiempos de vida media después de la descontinuación del agente con el éster más largo. Cuando se toma testosterona, el nivel de estradiol aumenta naturalmente, lo que significa que un nivel demasiado bajo sólo es posible si se toma demasiado del inhibidor de la aromatasa. La mayoría de la gente elige una testosterona de 500mg/semana para su primer ciclo. Aunque la comunidad de culturistas reconoce estas pautas, no son, por supuesto, reglas rígidas e inviolables.
Sin embargo, hay algunos hábitos saludables que podrían ayudarte a mejorar tu postura y aparecer más alto. La hormona del crecimiento humano (HCG) es una hormona producida por la glándula pituitaria que estimula el crecimiento y la reproducción celular. La vitamina D también es importante para la salud ósea y se necesita para la absorción adecuada del calcio. Los estudios indican que los bajos niveles de vitamina D pueden afectar negativamente el crecimiento óseo y aumentar el riesgo de fracturas.
References:
natural vs steroid bodybuilding (https://agedcarepharmacist.com.au/employer/clenbuterol-opiniones/)
Here is my web site; high stake poker
Here is my webpage: Maryanne
Also visit my page Poker online
Feel free to visit my web site High stakes game
Here is my page: high stakes game
my website — highstakespoker
Here is my homepage: PokerTube — Watch Free Poker Videos & TV Shows
But doping for sports activities is not one of the uses the medication are approved for. When you’re taking anabolic steroids, your physique breaks the drug down into molecules that may move into your cells. There, the steroid molecules bind to constructions known as androgen receptors. This is the place anabolic steroids actually take on the role of testosterone, because androgen receptors are formed very particularly to bind with the body’s natural testosterone. Nevertheless, we have had sufferers who understand the dangers and are joyful to put their well being (or life) at risk so as to win a bodybuilding trophy. In this instance, steroids are worth it to them (at least within the quick term).
Unfortunately, steroids could be addictive, making it hard to stop taking them. One Other pure compound that mimics anabolic results with out the harsh side effects. This signifies that these peptides offer the fat-burning benefits of HGH without its other effects—whether useful or adverse—and come at a decrease cost. This modified version of IGF-1 is engineered to keep away from binding with IGF-binding proteins, extending its half-life to 20–30 hours. As a result, it remains lively in the physique considerably longer than pure IGF-1.
And the ability to remain on this place produces the ability to make use of better pulling mechanics in an explosive pull, thus involving extra muscle mass in the explosion. Olympic weightlifting in the Usa does not have the decide of the most effective genetic specimens for strength and power. We’re in line behind the NFL, scholarship sports activities, and team sports in any respect ranges for recruiting these folks. If you can’t get the best genetics, you have to make up for that with higher training of the ones you’ve obtained. But men and women both produce testosterone, identical to they each produce types of estrogen.
Calling bodybuilding an underground sport in the ’40s and ’50s can be an understatement. The trendy health club with weights didn’t actually take off until the ’60s. In this text, we’ll explore the real impact of steroids on strength, compare the results of steroid users and natural lifters, and talk about the method to maximize benefits while sustaining overall well-being. In the research, regular mice with a muscle damage received steroids simply earlier than injury and for two weeks after the harm. Mice receiving two weekly doses of steroids after the damage carried out better on treadmill testing and had stronger muscle than mice receiving a placebo. Trying forward, bodybuilding wants open talks amongst doctors, regulators, and athletes.
Some of probably the most potent anabolic steroids for power are Anadrol, Superdrol, Trenbolone, Dianabol, and Testosterone, based on our patients’ stacks (who compete in strongman competitions). Immense increases in muscular power are frequent with anabolic steroids, significantly bulking compounds. All anabolic steroids are forms of exogenous testosterone and thus stimulate lipolysis (fat loss). Anabolic steroids cause the pituitary gland to cease producing LH and FSH (6) because of excessive testosterone ranges. These two endogenous hormones are essential within the production and health of sperm (7); thus, a deficiency can lead to males turning into sterile. We have seen numerous steroid customers with thick hair due to strong genetics in regard to follicle well being and reduced natural levels of 5 AR.
Andro can injury the center and blood vessels in anybody who takes it. This raises the risk of a significant issue that can happen when the heart does not get sufficient blood, called a coronary heart assault. It also raises the chance of a condition that keeps the mind from getting sufficient oxygen, referred to as a stroke. Andro is legal to use only if a health care supplier prescribes it. Androstenedione, also referred to as andro, is a hormone everyone’s body makes. The physique turns andro into the hormone testosterone and a form of the hormone estrogen. Having visible veins is fascinating for lots of bodybuilders, making a more ripped and impressive physique.
This was partially my fault since I hadn’t provided sufficient context. To many people, the estimate that steroids offered a relative power advantage of roughly 10% appeared like it simply had to be too low (though it was based on the most effective out there data). 4) If you are taking steroids and then come off of them, you’ll probably lose a number of the dimension and strength you gained, but you’ll always be at an advantage relative to a lifetime drug-free athlete. They cause your muscular tissues to synthesize more protein, however there’s extra to power than muscle protein accretion. There is a relationship between «bigger» and «stronger» (obviously), however the relationship isn’t 1 to 1. If the 10% determine sounds like too solid of a difference, not afforded by the out there proof, I even have no problem placing a confidence interval on it. Looking on the records, the smallest unfold we see is 0%, and the most important we see is 20%.
There can be a version that could be inhaled via your nostril. When you improve muscle mass and strength, shedding physique fat becomes simpler later on. You’ll be able to work harder during those HIIT periods when you’re trying to cut, due to that increased power. What’s extra, increased muscle mass leads to a complete host of hormonal changes that assist velocity up fats loss, while maintaining muscle.
Nicknamed the «grandfather of all anabolic steroids,» Dianabol has been used since the 1970s by in style public figures like Arnold Schwarzenegger to build desirable our bodies. If you aren’t knowledgeable bodybuilder, you could wish to comply with such low doses to prevent the danger of growing masculine features or appearance during the cycle. Nonetheless, professionals might properly increase the dose to placed on bulkier muscles in trade for a lack of their feminine features. Not only does this compound assist users put on appreciable amounts of lean muscle tissue, but it additionally aids the efficient burning of fats reserves situated beneath your skin (subcutaneous fat). And keep in thoughts that first-time customers could acquire anywhere between 15 and 20 kilos throughout this cycle.
In recent years, researchers (and pharmaceutical companies) have centered on the results of testosterone deficiency, particularly amongst men. In fact, as men age, testosterone ranges drop very steadily, about 1% to 2% each year — not like the comparatively fast drop in estrogen that causes menopause. The testes produces much less testosterone, there are fewer signals from the pituitary telling the testes to make testosterone.
References:
d bolt Steroids; http://gitlab.taoyuewenhua.com/reaganyork8294,
металлические пины значки https://metallicheskie-znachki-zakaz.ru/
металлические значки на рюкзак http://metallicheskie-znachki-zakaz.ru
Feel free to surf to my site: highstakesweeps
Here is my page … Poker High Stakes
Take a look at my page … Daycare Near Me — Find The Best Daycares
Near You — daycarenearme.info,
Уборка квартир в культурной столице! Забудьте о быте, окунитесь в свежесть. Мастерски, оперативно, недорого. Закажите сейчас! Нажимайте https://uborka-kvartir24top.ru/
продажа аккаунтов соцсетей платформа для покупки аккаунтов
my page http://www.bestwesternbedfordinn.com
магазин аккаунтов социальных сетей https://marketplace-akkauntov-top.ru
покупка аккаунтов купить аккаунт
Account market Buy and Sell Accounts
Here is my site … Doreen
My site :: PokerTube — Watch Free Poker Videos & TV Shows
Feel free to visit my web-site — bumpnt.com
Also visit my blog; Free Poker
my page — Highstakes 777 Online Play
Account Catalog https://socialaccountsstore.com/
I like this website it’s a master piece! Gllad I found this on google.
Here is my blog post — dewa petir 88
Sell Account Marketplace for Ready-Made Accounts
Buy and Sell Accounts Secure Account Sales
Accounts market Account Market
Feel free to visit my webpage :: https://www.google.ca/url?q=https://www.pokertube.com
Incredible points. Soliid arguments. Keep up the good effort.
Here is my wweb page … Herman
Hello! Do you know iif they make any plugins to help with SEO?
I’m trying to get my blog to rank for some targeted keywords
but I’mnot seeing very good gains. If you know of any please share.
Thanks!
Feel frfee to visit my blog :: hotel noise control consultant Miami
account catalog accounts for sale
account purchase accounts for sale
Thanks to my father wwho told me about this website, this website is truly remarkable.
Also visit my webpage: nagaair88 heylink
Also visit my website Find top-rated certified Daycares in your area
account trading service account selling platform
Thanks for any other manificent article. Where epse may just anybody get that kind of information in such a perfect method of
writing? I’ve a presentation subaequent week, and I am on the search for such info.
My blog … Highstakes download
Hello! I just would like to offer you a biig thumbs up for your excellent information you
haave got right here on this post. I am coming back too your blog for morre soon.
my web page; Maryjo
gaming account marketplace account trading platform
My homepage — Poker Casino
Nicely put, Appreciate it.
account trading platform account trading platform
sell accounts account trading platform
find accounts for sale account exchange
accounts for sale account market
Kudos, Good information.
online account store account buying service
guaranteed accounts account selling service
I’ll right away grasp your rss as I can not to find your e-mail subscription hyperlink or newsletter service.
Do you have any? Please permit me realize in order that I could subscribe.
Thanks.
account marketplace profitable account sales
website for buying accounts account buying platform
My spouse and I stumbled over here by a diffeerent website aand thought I miight as well check things out.
I like what I see so now i’m following you. Look forward to checking out
your web page repeatedly.
Stop by my web blog Commercial solar panel installers
Pretty great post. I just stumbled upon your blog and wanbted
too say that I have really enjoyyed surfibg around
your weblog posts. In any case I’ll be subscribing to your rss feed and I’m hoping you wite once moe very
soon!
Here is my blog; Solar power company
Some reallyy interesting points youu have written.Helpe mme a lot, just wnat I was looking
for :D.
Feel free to surf to my blog pkst — Colette
website for buying accounts buy account
My website — highstakes Poker
Feel free to surf to my webpage — PokerTube — Watch Free Poker Videos & TV Shows
marketplace for ready-made accounts account purchase
account market account trading service
account buying service buy and sell accounts
sell account database of accounts for sale
secure account purchasing platform account store
Glad to be one of the visitors on this awful website :D.
Look into my site; link lala33
Hello there! I know this is kinda off topic but I
was wondering if you knew where I could get a captcha plugin for my comment form?
I’m using the same blog platform as yours and I’m having
difficulty finding one? Thanks a lot!
secure account purchasing platform profitable account sales
account selling service https://shop-social-accounts.org/
my homepage high stake Poker
my page — http://www.netcash.us.com/__media__/js/netsoltrademark.php?d=account.gridoto.com/login/Z3JpZA==/aHR0CHM6Ly93d3cucG9rZXJ0dWJlLmNvbQ
Here is my site: highstakes Login
I think the admin of this website is genuinely working
hard for his web site, for the reason that here every stuff is quality based material.
account trading platform https://accounts-offer.org/
Some genuinely interesting details you have written.Aided me a lot,
just what I wass looking for :D.
my blog :: kaca mobil Volkswagen
purchase ready-made accounts https://accounts-marketplace.xyz/
Take a look at my website :: high stakes
Feel free to surf to my site: best online poker sites
account trading service https://social-accounts-marketplace.xyz/
Appreciation to my father who shared with me about this weblog, this
web site is in fact awesome.
Feel free to visit my web blog link danauhoki88
Also visit my blog post; highstakes poker
account sale https://accounts-marketplace-best.pro
продажа аккаунтов akkaunty-na-prodazhu.pro
площадка для продажи аккаунтов https://akkaunt-magazin.online/
продажа аккаунтов akkaunty-market.live
Also visit my page poker high Stakes
Feel free to visit my website highstake
ГГУ имени Ф.Скорины https://www.gsu.by/ крупный учебный и научно-исследовательский центр Республики Беларусь. Высшее образование в сфере гуманитарных и естественных наук на 12 факультетах по 35 специальностям первой ступени образования и 22 специальностям второй, 69 специализациям.
маркетплейс аккаунтов akkaunty-optom.live
маркетплейс аккаунтов https://online-akkaunty-magazin.xyz/
маркетплейс аккаунтов соцсетей https://kupit-akkaunt.online/
Create vivid images with Promptchan AI — a powerful neural network for generating art based on text description. Support for SFW and NSFW modes, style customization, quick creation of visual content.
Портал о недвижимости https://akadem-ekb.ru всё, что нужно знать о продаже, покупке и аренде жилья. Актуальные объявления, обзоры новостроек, советы экспертов, юридическая информация, ипотека, инвестиции. Помогаем выбрать квартиру или дом в любом городе.
Simply desire to say your article iss as surprising. Thee clearness in your post
is just cool and i can assume you’re an expert oon this subject.
Fine wikth your permission allow me to grab your RSS feed too keep updated with forthcoming post.
Thanks a million and please keep up the enjoyable work.
my blog :: Eye Puffiness
my web page — watch free Poker videos & Tv shows
buy aged facebook ads accounts facebook ad accounts for sale
buy facebook ad accounts facebook ad accounts for sale
Also visit my web page … Daycare Near Me — Find The Best Daycares Near You
buying facebook account https://ad-account-buy.top/
fb accounts for sale buy aged facebook ads account
70918248
References:
https://jobsrific.com/employer/does-boron-increase-testosterone/
70918248
References:
where can i buy steroids to build muscle (https://alternance974.re/employer/best-mens-testosterone-supplements/)
buy google ads https://buy-ads-account.top
70918248
References:
https://taqarec.co.uk/employer/kann-ich-testosteron-gel-in-der-nacht-verwenden/
заказать реферат москва купить реферат
70918248
References:
steroids drug (https://rayjohnsonmechanical.ca/employer/how-much-free-testosterone-should-a-man-have/)
buy ad account facebook https://buy-accounts.click/
70918248
References:
https://winacess.com/employer/9144/does-low-testosterone-affect-muscle-growth
buy google agency account https://ads-account-for-sale.top
Take a look at my webpage — pokertube — watch free poker videos & tv shows
70918248
References:
anabolic steroid pills for sale (https://www.virtuosorecruitment.com/employer/what-causes-man-to-have-low-testosterone/)
Как зайти на сайт bs2best https://b2sbest.at
Вход bs-https://b2sbest.at
bs2best
bs2best at
bs2site
blacksprut
bs2site at
https bs2best at
https bs2site at
блекспрут
blacksprut ссылка
blacksprut com
blacksprut зеркала
blacksprut зеркало
blacksprut сайт
bs blacksprut
тор blacksprut
blacksprut официальный
bs2best at ссылка
tor blacksprut
blacksprut ссылка tor
blacksprut darknet
blacksprut сайт зеркало
blacksprut bs2tor nl
bs2site at ссылка
blacksprut blacksprut click
blacksprut официальный сайт
блекспрут bs2tor nl
рабочая blacksprut
blacksprut ссылка тор
bs2web
blacksprut com зеркало сайта
blacksprut вход
https bs2site at login
blacksprut onion
blacksprut com ссылка
как зайти на blacksprut
тор браузер blacksprut
blacksprut сегодня
ссылка на блекспрут
блекспрут сайт
blacksprut официальная ссылка
blacksprut актуальные
blacksprut ссылка bs2tor nl
блекспрут зеркало
блекспрут blacksprut
http blacksprut ссылки
blacksprut зеркало официальный
bs2web at
bs2site at не работает
blacksprut не работает
blacksprut ссылка зеркало
2fa blacksprut где взять
blacksprut зеркала tor
блэкспрут blacksprut
блекспрут com
blacksprut площадки
блекспрут blacksprut click
bs2site at зеркала
блекспрут bs2
blacksprut com официальный
blacksprut официальный сайт ссылка
blacksprut onion ссылка
блэкспрут blacksprut click
актуальная ссылка на blacksprut
bs2best at зеркала
как найти blacksprut
блекспрут 2fa
bs2best at бс сайт
bs2best at не работает
blacksprut ссылка на сайт
блэк спрут blacksprut click
blacksprut зеркала bs2tor nl
тор блекспрут
зеркало blacksprut darknet
bs2web run
blacksprut зеркало официальный сайт
как зайти на сайт blacksprut
blacksprut com вход
блекспрут вход
bs2web top
рабочее зеркало blacksprut
https bs2site at сайт
как зайти на блекспрут
как зайти через blacksprut
bs2best at регистрация
blacksprut поддержка
blacksprut onion зеркало
blacksprut com официальный сайт
blacksprut зеркала актуальные
bs2web nl
рабочая ссылка на blacksprut
blacksprut рулетка
bs2besd at
рабочая ссылка блекспрут
https bs2best at сайт
блекспрут официальный сайт
ссылка блекспрут тор
bs2web com
blacksprut онион
блекспрут бс сайт bs site biz
блекспрут bs2web
блекспрут com ссылка
blacksprut официальный bs site biz
blacksprut площадка зеркало
блекспрут онион
блекспрут актуальные ссылки
blacksprut войти
blacksprut зеркало работающее
blacksprut сайт bs2 best at
http blacksprut onion
блекспрут надежные ссылки
ссылка на блекспрут bs site biz
сайт блекспрут ссылки
blacksprut net официальный сайт
https bs2best at не работает
bs2web зеркало
блекспруте blacksprut me
как открыть ссылку bs2web at
70918248
References:
testosteron gel frauen nebenwirkungen — https://jobster.pk/companies/anavar-mit-test/,
buy google ads agency account https://buy-ads-invoice-account.top
buy google ads threshold account https://buy-account-ads.work
70918248
References:
https://www.expressjobsmalta.com/employer/masturbieren-testosteron-hsushalt/
My web-site: Johntapper.info
buy google adwords account https://sell-ads-account.click
70918248
References:
anabolic steroids effects on the body (https://kartpage.in/employer/testosterone-controlled-substance/)
70918248
References:
https://jobsyt.com/companies/gta-5-bullenhai-testosteron-woher/
– То-то фамилия! – в тоске крикнул Иван. перевод паспорта иностранного гражданина – Ну что с тобой сделать за это? – спросил флибустьер.
«Это он мне вместо спасибо! – горько подумал он. как можно самому продвинуть сайт Рюхин, обремененный полотенцами, был встречен Арчибальдом Арчибальдовичем очень приветливо и тотчас избавлен от проклятых тряпок.
buy facebook business manager https://buy-business-manager.org
buy google ads verified account https://buy-verified-ads-account.work/
Еще несколько секунд, и вот какой-то темный переулок с покосившимися тротуарами, где Иван Николаевич грохнулся и разбил колено. инструкция создания сайта на вордпресс И когда секретарь и конвой вернулись на свои места, Пилат объявил, что утверждает смертный приговор, вынесенный в собрании Малого Синедриона преступнику Иешуа Га-Ноцри, и секретарь записал сказанное Пилатом.
business manager for sale https://buy-bm-account.org
my webpage: Silas
buy facebook business manager verified buy-verified-business-manager-account.org
facebook business manager for sale https://buy-verified-business-manager.org
buy verified business manager https://buy-business-manager-acc.org/
Have you ever thought about writing an ebook or guest authoring on other
sites? I have a blog based on the same ideas you discuss and would love to have you share some stories/information. I know my audience would value your work.
If you are even remotely interested, feel free
to shoot me an e-mail.
Here is my web page … Poker Online
buy facebook business account https://buy-business-manager-verified.org
Hey! Do you know if they make any plugins to protect against hackers?
I’m kinda paranoid about losing everything I’ve worked
hard on. Any recommendations?
my web page :: Iesha
verified bm for sale https://buy-bm.org/
Hi! This is kind of off topic but I need some help from an established blog.
Is it very hard to set up your own blog? I’m not very techincal
but I can figure things out pretty fast.
I’m thinking about creating my own but I’m not sure where to begin. Do
you have any ideas or suggestions? With thanks
Review my homepage High Steaks Poker
facebook business manager for sale https://buy-business-manager-accounts.org
facebook business manager buy buy facebook business manager verified
buy tiktok ad account https://buy-tiktok-ads-account.org
70918248
References:
https://theflatearth.win/wiki/Post:What_Is_Anavar_Effectiveness_Side_Effects_Availability
buy tiktok ads tiktok ad accounts
tiktok ad accounts https://tiktok-agency-account-for-sale.org
70918248
References:
https://www.google.com.uy/url?q=https://telegra.ph/10-Powerful-Tips-For-Purchasing-Anavar-Safely-For-Health-Enthusiasts-05-20
Also visit my blog post :: Daycares By Category
my web page :: high stack poker
Betflixslot เว็บมั่นคง ปลอดภัย เล่นได้จ่ายจริง 100%
หลายคนอาจเคยเจอปัญหา เล่นได้แต่ถอนเงินไม่ได้ หรือถอนแล้วเงินไม่เข้า แต่ขอบอกเลยว่า ที่นี่ไม่มีวันเกิดปัญหาเหล่านั้น เพราะเราคือเว็บที่ให้บริการมาอย่างยาวนาน มีความมั่นคงทางการเงินสูง Betflixslot การันตีจากจำนวนผู้เล่นที่เข้าใช้งานต่อวันนับหมื่นคน ระบบหลังบ้านของเราเสถียร ปลอดภัย และมีทีมพัฒนาคอยดูแลอย่างต่อเนื่อง ที่สำคัญคือเราจ่ายจริงทุกยอด ไม่ว่าจะหลักร้อยหรือหลักแสน
70918248
References:
https://www.laba688.com/home.php?mod=space&uid=8084142
70918248
References:
Legal steroids com reviews — http://www.yya28.com/home.php?mod=space&uid=1688063,
70918248
References:
anabolic steroids short term effects (https://bbs.airav.cc/home.php?mod=space&uid=3369553)
tiktok ads agency account https://tiktok-ads-agency-account.org
my web page … high steaks Poker
What i do not understood is in truth how you’re now not really a lot more smartly-appreciated than you might be now.
You are so intelligent. You understand thus considerably
in the case of this subject, made me in my opinion imagine
it from a lot of various angles. Its like men and women aren’t interested
except it’s one thing to accomplish with Lady gaga! Your personal stuffs outstanding.
All the time take care of it up!
buy tiktok ads https://buy-tiktok-ads.org
Do you mind if I quote a couple of your posts as long as I provide credit and sources back to your website?
My website is in the exact same niche as yours and my visitors would definitely benefit from a lot
of the information you provide here. Please let me know if this alright with you.
Thanks a lot!
Feel free to surf to my site; everygame poker review
Here is my page :: top 10 poker sites (lstelecom.co.kr)
Та гораздо больше, и как бросится! И укусила! – Не ври, – окоротил друга Славка, знающий о поразительном миролюбии безногой ящерицы, – глухарь не кусается. – Конечно, носилки! Широкая занавеска с треском оторвалась от потолка. Маргариту чрезвычайно заинтересовало и поразило то, что шахматные фигурки были живые.
Так, очень хорошо. Ну, кто ещё способен на такое? Прошу…. Он лихорадочно схватил со стола гипнотизерские червонцы, спрятал их в портфель и кашлянул, чтобы хоть чуточку подбодрить себя.
Волосы, уложенные в причёску, прикрыты белым, полупрозрачным шарфиком, который крыльями развевался за спиной. Быстров-младший плёлся последним, незаметно разматывая остаток шпагата. Им с места сдвинуться – труд тяжкий… Нашел, держи, – и небольшой зеленоватый камень с крышкой лег на ладонь Русаны.
адрес типографии дешевая типография
Аркадий и Базаров лежали в тени небольшого стога сена, подостлавши под себя охапки две шумливо-сухой, но еще зеленой и душистой травы. – Здравствуйте, дядюшка, и мы едем, – прокричал Петя. Наш язык я им передал.
my blog post :: high stakes
Вы померяйте своих, а я посмотрю! – Ругай! На, на! – крикнул он. Оказалось, их уже опросили, но не поверили. Мальчишки поёрзали, умащиваясь на жестковатых ложах.
Та расхохоталась, как ненормальная: – Яр, это самое приятное воспоминание со всех дней рождения! Силена давно пора было хорошенько побить! Видел бы ты, какой у него фингал! Гектору передай привет и шепни – девочки от него в восторге… Славка немедленно поделился новостью с друзьями, и настроение у всех поднялось – выше некуда. В это время откуда-то с другой стороны переулка, из открытого окна, вырвался и полетел громовой виртуозный вальс и послышалось пыхтение подъехавшей к воротам машины. Судя по всему, немаленький, если топотали по нему, затем по палубе и по коридору, где звук стал гулким.
Incredible points. Grea arguments. Keep uup the amaaing effort.
Here is my homepage: Public Relations Agencies
Excellent weblog here! Additionally your website loads uup very fast!
What host are you the usage of? Can I am getting your
associate hyperlink to your host? I desire my site loaded up
as fast as yours lol
Visit myy blog — golf tournament marketing
Нужна https://pechat-nakleek1.ru? Закажите стикеры любых форм и размеров с доставкой. Яркие, прочные, влагостойкие наклейки на пленке и бумаге — для рекламы, декора, маркировки и упаковки.
Профессиональная типография заказать. Изготовим любые печатные материалы — от визиток до каталогов. Качественно, быстро, с гарантией. Закажите онлайн или приезжайте в офис в СПб.
Feel free to visit my web blog; http://Ulam.Com/
my site: Freda
I’ll immediately take hold of your rss feed as I can’t to find your e-mail subscription link or newsletter service.
Do you’ve any? Kindly allow me know in order that
I may subscribe. Thanks.
Also visit my web page; Poker Cash Games
медицинский центр отзывы сайт клиники
доставка цветов на дом заказать цветы с доставкой на дом
узи абакан платно узи абакан платно
– Ну, душа моя, – сказал он, – я вчера хотел сказать тебе и нынче за этим приехал к тебе. Знакомства Взрослые В Казахстане Бросаем вон в того, лысого.
My website :: pokertube — watch free poker videos & Tv shows
Рычание отдавалось в ушах – словно отдалённая гроза погромыхивала. Секс Знакомства Во Фряново Вы, – он обвёл рукой всех волхвов, – народ по мелким богам растаскиваете, оттого разброд! А вот я – от истинного бога и за истинного царя! Ждан спросил, что ещё слова просит, но Борун отказался, молча пересел на сторону Тагета.
Look at my website — best poker Sites
Свежие актуальные Мировые новости спорта со всего мира. Результаты матчей, интервью, аналитика, расписание игр и обзоры соревнований. Будьте в курсе главных событий каждый день!
my homepage — http://www.markg.Com/__media__/Js/netsoltrademark.php?d=www.umraniyeli.com/author/gabrieleicx/
My homepage free poker
Here is my web site; Watch Free Poker TV Shows
my blog: https://www.Clickgratis.com.br/download/url.php?url=aHR0cHM6Ly9tMWJhci5jb20vdXNlci9FdmVyZXR0Q291cnRvaXMv
my web page: high stakes download link http dl highstakesweeps com
my website … free poker
Комфорт и женственост в новата серия от спортно-елегантни рокли
дамски рокли https://rokli-damski.com/ .
Hey there, You’ve done a fantastic job. I will definitely
digg it and personally recommend to my friends.
I’m confident they will be benefited from this web site.
My webpage: kkpoker review
Дамски тениски за офиса и свободното време в свежи нови дизайни
интересни дамски тениски https://teniski-damski.com/ .
Here is my web-site … poker game
Блузи в универсални цветове за безброй модни комбинации
дамски блузи с къс ръкав http://www.bluzi-damski.com/ .
Мир полон тайн https://phenoma.ru читайте статьи о малоизученных феноменах, которые ставят науку в тупик. Аномальные явления, редкие болезни, загадки космоса и сознания. Доступно, интересно, с научным подходом.
Читайте о необычном http://phenoma.ru научно-популярные статьи о феноменах, которые до сих пор не имеют однозначных объяснений. Психология, физика, биология, космос — самые интересные загадки в одном разделе.
Feel free to visit my blog post: high stakes download link http dl highstakesweeps com
Trenbolone is also a robust fat-burning steroid and is thus typically utilized in slicing cycles too. With bodybuilders desirous to look as ripped as attainable, trenbolone is a well-liked alternative, as customers won’t endure from clean, puffy muscle tissue or bloating. In our experience, using Decaduro alone is not going to yield vital muscle gains. Thus, for max muscle hypertrophy, stack Decaduro with D-Bal, Anadrole, Trenorol, and/or Testo-Max.
With oral testosterone, 20 grams of dietary fat must be consumed with every dose for optimum absorption. We have found that a SERM could additionally be a better choice than an AI (aromatase inhibitor), as the latter can worsen blood lipids, rising the chance of hypertension. Blood strain can rise to very high ranges on Anadrol, and thus the cardiovascular pressure is deemed excessive for beginners. In Contrast To Anavar and testosterone, Dianabol is particularly hepatotoxic; thus, some liver assist should be taken throughout your cycle. A beneficial supplement is TUDCA (tauroursodeoxycholic acid), which we’ve seen effectively lower raised liver enzymes, decreasing hepatic stress.
Thus, although it could be argued that injectable steroids are safer in regard to having decreased hepatotoxicity, administering them is potentially deadly to the inexperienced. Moreover, needle contamination is a further danger; thus, customers should be wary of hygiene and the sharing of needles. In our expertise, here’s a record of the 7 primary steroids used at present in bodybuilding, in order of safest to most harmful. Though steroids are doubtlessly dangerous and there’s proof for a shorter life expectancy, some do take anabolic steroids and stay long lives. They skilled important increases in weight (in the type of lean body mass), while «no topic experienced toxicity» (7).
This web site has a neat illustration displaying the common measurement of NFL players over time. You’ll often find that folks stack it with Anavar and testosterone (usually the propionate type). This is a good all-purpose steroid that can be taken orally or injected. Of course erectile points can even happen and even proceed for a year after stopping the drug. Trenbolone is taken via injection and is recognized as one of the powerful of all steroids available on the market.
Women could notice a delicate decrease in natural testosterone from taking Anavar, plus some negative shifts in ldl cholesterol; however, such results are solely prone to be subtle. Prospects have mixed opinions about the dimension of the complement capsules, with some discovering them larger and appreciating the noticeable muscle progress, while others discover them difficult to swallow. Although no anabolic steroid is 100% secure, some are categorized as important medicines by main well being organizations.
Superdrol is among the most hepatotoxic anabolic steroids out there, along with methyltrienolone. Diuretics are medicine that enhance the speed of urine manufacturing by the kidneys, leading to a lack of water and electrolytes from the body. In bodybuilding, diuretics are typically used to assist cut back water retention within the body and promote a extra outlined and muscular appearance on stage. The use https://gra.edu.co/pages/anavar_dosage_and_results.html diuretics in this method is usually referred to as «slicing water weight» [21]. However, the misuse of diuretics can have serious well being penalties. By increasing the speed of urine manufacturing, diuretics could cause dehydration and electrolyte imbalances, leading to muscle cramps, dizziness, fainting, and even death in severe instances. The loss of electrolytes corresponding to sodium and potassium can even negatively affect the guts, resulting in arrhythmias and different cardiovascular problems [22].
Improvements in muscle hypertrophy are reflected within the user’s 2 kg weight achieve, despite decreasing her physique fats proportion. Since there isn’t a drug testing in IFBB pro bodybuilding, the highest opponents are recognized for their liberal use of anabolic steroids. They push the body to build muscle beyond what could be possible with normal testosterone ranges. Dianabol is an oral anabolic steroid that’s extremely effective for shortly growing muscle mass and strength.
Crazy Bulk is by far the largest legal steroids brand on social media, with 11.9k followers on Instagram and four.8k followers on Twitter. The solely other noteworthy competitor on social media was SDI Labs, with 2,994 Facebook followers, and Flexx Labs, with 1,671 fans. Loopy Bulk is the main retailer of authorized steroids online, selling over 500,000 bottles. Injectable steroids are not processed and broken down by the liver upon entry (7).
Furthermore, in analysis, it is commonly prescribed to girls and kids (8) to help them acquire lean mass. Some water retention is common when utilizing testosterone; nevertheless, this won’t be as much compared to other bulking steroids, corresponding to Dianabol or Anadrol. Subsequently, injectable testosterone is much more cost-effective for newbies. Even experienced steroid customers may be cowards when it comes to taking testosterone suspension, so beginners are extremely unlikely to take pleasure in this.
The use of these substances can result in severe short- and long-term health consequences and contribute to the development of an unhealthy and harmful culture of competition. The present state of laws and prevention efforts is insufficient, and extra have to be done to address this concern. Research also needs to explore the social and cultural factors that contribute to the usage of these substances and how they are often addressed. Overall, a complete and coordinated effort is needed to address the darkish side of bodybuilding and promote safe and healthy practices in this sport.
Услуги клининга по подписке — чистота на регулярной основе
клининговая компания москва https://www.kliningovaya-kompaniya0.ru .
We have found that SERMs, such as Nolvadex, effectively inhibit estrogenic activity within the mammary glands with out affecting estrogen levels. Bodybuilders in our clinic sometimes gain 25–30 pounds of weight throughout their first Dianabol cycle, with roughly two-thirds of this being lean muscle and the remaining being water retention. These steroids shall be ranked in order of potency from 1 to 5, with 1 producing one of the best results.
Although not the most highly effective of steroids, Deca is usually utilized by bodybuilders to enhance the positive aspects from other bulking steroids. Based on our exams, Anadrol is possibly the worst anabolic steroid for the center and liver. Subsequently, it’s usually averted by steroid customers who choose to go for lighter steroids, which might nonetheless yield spectacular results (such as testosterone or Dianabol). The AR – testosterone complicated (Fig 2A) exhibited a network of multiple hydrogen bonds and hydrophobic interactions.
This is as a result of these anabolic steroids will exhibit no Estrogenic exercise in the physique, thereby avoiding unwanted side effects corresponding to bloating and water retention, gynecomastia, and different Estrogen-related side effects. DHT derivatives and analogues https://kino-fada.fr/pages/dianabol_acheter_en_ligne_1.html subsequently preferred among bodybuilders for fat loss and chopping phases of weight-reduction plan, the place a lean and ‘hard’ look to the physique is desired over the delicate, puffy, and bloated look that aromatizable androgens will commonly provide. An undetermined percentage of anabolic steroid customers may develop a anabolic steroid use disorder. Anabolic steroid customers additionally could surrender different necessary activities for concern that they will miss exercises, violate their dietary restrictions, or be prevented from utilizing anabolic steroids. Anabolic steroid customers also usually spend massive amounts of time and money acquiring the medication, they usually could try to reduce or cease anabolic steroid use with out success—possibly due to despair, nervousness about dropping muscle mass, or and different unpleasant results of withdrawal forty two. As an adjunct, much of the physiological significance of non-genomic actions of androgens is still to be elucidated, not least with respect to androgen-induced cell-cycle development. The induction of second messenger signal transduction cascades by steroids commonly happens inside seconds to some minutes, in contrast to genomic activity of the traditional steroid receptors that takes 30–60 min.
Primobolan has lengthy been well-liked amongst athletes as a result of it can construct strength without muscle bulk or most of the unfavorable side effects of different steroids. Steroids are organic compounds that hold a chemical structure characterized by a particular association of 4 cycloalkane rings which might be connected to at least one another. These rings are composed of no less than twenty carbon atoms which would possibly be sure together, which kind the ring shapes. The A, B, and C rings are cycloalkane rings recognized specifically as cyclohexane rings (rings that contain 6 carbon atoms). The D ring differs from the other rings because of the truth that it is known as a cyclopentane ring (a ring that incorporates 5 carbon atoms). The above testosterone cycle would be categorised as a bulking one, with users experiencing giant increases in muscular strength and hypertrophy.
Another efficient choice is to stack Deca Durabolin with an androgenic steroid, such as testosterone, growing nitric oxide and thus blood flow to the penis. Deca Durabolin doesn’t just produce spectacular positive aspects in mass but also drastically will increase intracellular fluid, leading to exceptional muscle fullness and thickness. If this weren’t an inventory of the most effective steroids for mass however as a substitute the most effective steroids for lean muscle, trenbolone can be number one.
Before initiating treatment with testosterone, prognosis of hypogonadism require affirmation by measuring early morning testosterone levels on two separate days. Lipid profile, liver operate checks, hemoglobin, hematocrit, prostate-specific antigen (PSA), and prostate exam in sufferers older than forty years of age are needed earlier than initiating treatment. Proof suggests that weightlifters who misuse anabolic steroids have stiffer tendons, which may lead to an increased threat for tendon damage 123. To be secure, anabolic steroid use should be stopped no much less than four months earlier than falling pregnant, in addition to throughout pregnancy 37, 38. Anavar can also be utilized by experienced steroid users when chopping to maximise fats loss while retaining muscle tissue.
Also, packages that teach various, healthy methods to extend muscle measurement and enhance efficiency may be useful. Research also signifies that some users would possibly flip to other drugs to alleviate a number of the negative results of anabolic steroids. For instance, a examine of 227 males admitted in 1999 to a private remedy middle for habit to heroin or other opioids found that 9.3 % had beforehand misused anabolic steroids 142. Of these, most reported using opioids to counteract insomnia, irritability, despair, and withdrawal from anabolic steroids 142. Anabolic steroid customers are extra likely to use medication such as marijuana, prescription opioids, cocaine, or heroin 138, 139. In a study of men admitted to treatment for opioid use problems, 25 p.c reported prior use of anabolic steroids.
The dose-response curve for anabolic steroids has not been clearly defined, but male athletes and body builders often use mega dosages 28. They also typically use a variety of anabolic steroids simultaneously («stacking») or sequentially («cyclically») due to a perception that these regimens are safer 28. With the exception of a few elite female athletes and body builders, ladies seldom use supraphysiologic dosages of anabolic steroid.
I loved as muhh as you’ll receive carried out right here.The sketch is tasteful, your authored subject
matter stylish. nonetheless, you commannd gett bought an edginess ovsr that you
wish be delivering the following. unwelkl unquesttionably come more formerly again aas exactly the
same nearly a lott often inside case you shield this
hike.
Feel fdee to surf to my website :: CBD Balms for Pain
Look into my webpage; Http //Dl.Highstakesweeps.Com Login
Качественные шины по доступной цене в онлайн-магазине
интернет магазин автошин http://www.kupit-shiny0-spb.ru .
Steroids additionally include a long listing of potential unwanted aspect effects that can be dangerous to your well being. As A Result Of there are legal substances you would actually use which replicate the advantages of steroids, maintain reading to find out. They aren’t going to screw together with your hormones and so they aren’t going to cloud your bloodstream, either. Greatest of all, you’ll be succesful of get all of these performance enhancements without ever throwing your brief or long-term health a curveball. Of course, then you’ve a whole bunch of products which are performance enhancement choices. My vitality levels skyrocketed, my endurance levels skyrocketed, and my spouse definitely observed a few huge «performance enhancements» from utilizing this Enhance complement, too. A actual efficiency enhancer, it’s not at all uncommon for folks to pack on between five to 10 pounds per cycle.
Following are the most effective steroids for muscle development that we now have shortlisted for your comfort. Whereas traditional steroids may take weeks to kick in absolutely, customers of Testol a hundred and forty typically report feeling its effects within days. This quick onset means you can take benefit of shorter cycles, reducing the general strain on your body. In my years of teaching, all males, with out exception, battle with the effects of declining testosterone. Testo Prime is the answer I’ve been recommending, and the outcomes speak for themselves. It Is not simply another testosterone booster; it’s a complete formulation designed to optimize your physique’s personal testosterone production naturally.
Importing or exporting larger quantities or distributing anabolic steroids can outcome in extra extreme penalties, including up to 5 years in prison and a fantastic of up to $250,000. Keep in thoughts that though steroids can improve your performance and muscle progress, the dangers may outweigh the benefits. It’s essential to be told in regards to the potential penalties of using steroids and contemplate alternative routes to succeed in your objectives.
Whereas it may be attainable for pure steroids to trigger some antagonistic effects, these are not normally as frequent or as severe as the ones caused by anabolic steroids. Pure steroids do not carry any danger of damaging your inner organs and tend to work simply in addition to anabolic steroids in terms of muscle positive aspects, fats loss, and more power and energy for working out. This complement has been created with pure ingredients with the primary goal of helping users achieve the muscle mass positive aspects that they want without having to risk their well being with anabolic steroids. D-Bal has managed to do what comparable products fall wanting by making it attainable to construct muscle in a safe, effective, and accessible means. In the Usa, anabolic steroids are categorized as Schedule III managed substances beneath the Managed Substances Act (CSA). This means that they’ve a potential for abuse and dependence, but additionally have a acknowledged medical use. Nevertheless, the possession and distribution of anabolic steroids with no valid prescription or license is towards the law and can lead to criminal penalties.
For those interested in exploring particular product recommendations, here’s a complete article detailing one of the best authorized steroids out there out there. While authorized steroids are typically protected, it is essential to monitor for any antagonistic reactions. Legal steroids, owing to their pure composition, often provide further health benefits corresponding to improved metabolism, better hormonal steadiness, and enhanced overall well-being. If you want to purchase steroids UK, then you have to be nervous about the authorized implications of doing so. Yes, products like D-Bal Max are mentioned to aid in fats loss and improve muscle definition whereas serving to to construct muscle.
This supplement is simply effective when used at the side of a nutritious diet and frequent exercise. Consider a natural anabolic steroid that comes with a clear record of components, so you know exactly what you’re putting in your body as you’re employed to realize higher muscle. Crazy Bulk D-Bal is the best authorized steroid for fast muscle gains and increased energy with boost-free testosterone. Sure, you could merely do a quick internet search, and in doing so you’ll find hundreds, perhaps even 1000’s of people offering to sell you the steroids you need, but this is not really helpful.
You should just ensure you usually are not relying solely on this complement, and that you simply sustain a nutritious diet and regular train routine to just remember to attain your weight loss objectives as shortly as potential. If you’re in search of anabolic steroids on the market in Canada, it is best to keep away from the black market and speak with your physician in regards to the out there choices. Nonetheless, most of the anabolic steroids in North America are made illegally. These are simply a few of the many unwanted effects that persons are exposed to when utilizing anabolic steroids for their purposes. I will make it easy for you, steroids are usually chemical compounds and substances that are artificial and a few produced within the body itself. The steroid which is in my knowledge that human physique produces is Testosterone which is in additional amount in males as compared to females. Testosterone is one such compound which aids the physique to lose fats and gain muscle and likewise enhance energy levels to a certain extent.
Not all dietary supplements, even common and normally safe ones, are appropriate for everybody. For instance, testosterone deficiency is rare in males under age 50. Checking for third-party testing and certification can even present extra assurance of a product’s quality and security. This external validation means that the product has been rigorously evaluated and meets established requirements for purity and efficiency. Discontinue use and search medical recommendation if you expertise unusual symptoms or unwanted side effects.
Some users additionally expertise the dangerous effects on cholesterol levels that may doubtlessly trigger atherosclerosis. In simple phrases, the hardening of arteries can cause cardiovascular stress and points. It can also be reported that Dianabol, when utilized in excessive dosages, may also shut down the production of testosterone ranges within the body. Subsequently, many of the customers observe an effective post-cycle remedy treatment to revive this pure T-levels production. With the utilization of Dianabol, you’ll have the ability to simply acquire up to 25 to 30 lbs of lean muscle mass in just one cycle.
He claimed the substances would improve muscle mass, cut back physique fats, and counter the unwanted unwanted facet effects of utilizing bodybuilding drugs. Some adults and teenagers use illegal anabolic steroids to decrease body fat, get greater muscle tissue, and increase strength. They use the medication because they are looking for to improve how nicely they play sports or how they give the impression of being. As A Result Of of this, individuals in Australia who’re looking for one thing that may help them meet their health objectives, have entry to natural and legal options instead, which may be both effective and safe. Many respected brands that are out there for Australians have begun producing supplements that can be used as a safer different to anabolic steroids. As A Substitute of buying bulking steroids, we’d suggest you to choose secure and legal supplements similar To steroids — https://frescina.com/art/comprar_hgh_4.html — steroids alternate options instead, as these can be bought without any prescription. Additionally, these authorized steroids options are safe to make use of because of their natural formulations and mimic all the results of steroids without any risks of side effects.
Keep In Mind, to hit your genetic potential, every facet of your life must be in line, and for many of us that is either not potential, or not desirable. Possibly 5 hours in the gym each week (plus another 5hours in getting changed, and travelling) is somewhat much so that you can deal with? Possibly not in the first year, but perhaps in the second or third. For most men who’re of average peak (5 foot 10), the realistic quantity of lean physique mass they’ll construct is round 80kg.
When Riches was a teen, he collected health magazines and saved a folder of inspirational photos and workout routines. He had the goal of being in one of the magazines earlier than he turned 21. Whereas training is necessary, Riches considers food regimen to be just as necessary. I remember at some point during the summer, I went out with a pal to movie some video of me mountain biking. After he was brought back to form, he was suggested by his doctor to get some train that might build his upper physique. This was when he first developed an curiosity in bodybuilding.
Adenosine Triphosphate (ATP) is a vital molecule that provides vitality to cells. Deadlifts were a regular a half https://abcdsofcooking.com/pgs/where_can_i_find_dianabol_pills_for_sale_.html Columbu’s routine, and he would do them after his killer leg exercises. He’d work his method up from 5 reps at 300 lbs to a single rep at seven hundred lbs. After just four years of coaching, Riches did indeed look ok to get into a health journal, however he didn’t know where to begin. He contacted a supplement company and rapidly got a optimistic response. At age 20, he did his first modeling gig for LA Muscle dietary supplements. Riches has slow-digesting casein protein before mattress to assist forestall muscle losing in a single day.
Furthermore, consisting of brown rice, candy potato, and oats. No Matter that’s herbal and with single elements is the standard concern to head for. As for carbohydrates, Ryan Terry advises it’s first-class to shoot for complicated carbs.
So by the time of the competition they’re technically ‘natty’ and skip the exams. Ryan Terry may have been examined in competitions, however greatest after coming off stage. He was additionally introduced up to push his-self to absolute limits in sports.
We typically think about energy and endurance as a part of our training, but flexibility and steadiness are also key parts when it comes to fitness in general. Ryan turned mister worldwide 2010 and mister distinctive Britain 2010. In 2013 Ryan took the step and has turn into an IFBB expert bodybuilder. And winning the championships while turning into the primary ever guys’ physique skilled from the Uk. Well-developed shoulders can mean the distinction between an excellent and an excellent physique. These routines will present you how to build dimension, power, and conditioning inside your shoulders. Rob’s training ideas has helped me lose a total of over 100lb of fats whereas placing on around 15lb of lean muscle tissue.
He shows a physique that most people would consider good. Some of his form’s highlights embody broad lats, deep, symmetrical abs, round delts, and aesthetic legs. Properly, his physique is so exceptional that legendary bodybuilder Arnold Schwarzenegger told him that he has the most effective physique on the earth. Wheels alternate coaching for energy lifting and bodybuilding to create an extremely robust but balanced physique.
Again stabbing, dirty ways, and manipulation appear to be the norm. This is why health models take illegal substances to get forward. By eating right and taking the best dietary supplements at the proper time? If delts are a lagging body part for you, then it would be a good suggestion to have a dedicated shoulder workout each week. After leaving my ego on the door and dropping all the way down to a three plate deadlift, I started progressing MUCH sooner, as a end result of I could really decelerate and give consideration to stretching and contracting on every rep. There is certainly one thing to be mentioned about making certain your exercises aren’t too one dimensional and completely power or pump focused.
My love affair with bodybuilding was now in full swing, but now that I had reached my goal, I was ready for the subsequent milestone. Som en bodybuilder, Riches has already received numerous bodybuilding reveals and placed 4th within the British Natural Bodybuilding Federation Finals twice. Rob is a really accomplished movie maker too as he edited and produced videos for himself, in addition to different health fashions and firms similar to LA Muscle. The main aim for pure bodybuilding can be to construct a tremendous physique, then make some cash from competitions, sponsorship, or social media.
If I go too excessive on energy I don’t develop infinite muscle, some of it should be stored as fat. He then eats two or three of his meals before attending his weighted fitness center session. Subsequently, from Ryan’s competitors history, there might be nothing to show whether or not he is natty or is taking steroids.
Verify out our best rated testosterone boosters to extend vitality, muscle, energy and libido. Additionally, numerous studies have reported an increase in symptoms of schizophrenia, homicidal tendencies and psychosis [2]. The transportation of free testosterone to the cytoplasm of target tissue cells results in its binding with the AR.
Anabolic steroids may be administered in numerous ways, including oral pills, injections, lotions or topical gels, and pores and skin patches. Each method has its personal advantages and downsides, and the selection of administration route will depend on several factors, including the desired impact, the particular steroid getting used, and the individual’s preferences and wishes. For instance, oral pills are simple to make use of and handy however could have a better risk of liver toxicity, whereas injections can present extra steady blood levels however could carry a danger of infections or injection web site reactions. Athletes may take steroids for a sure period, cease, then begin once more several occasions a year. Athletes additionally typically use many steroids on the similar time (a apply called stacking), and they take them by different routes (by mouth, injection, or patch). Biking, stacking, and pyramiding are meant to enhance desired effects and decrease dangerous results, but little evidence helps these benefits. Each type of prescription anabolic steroid and each model has different potential unwanted effects.
Aromatase expression and exercise is important in human skeletal muscle (Larionov et al., 2003) but whether the conversion of androgens to oestrogens within this tissue is physiologically necessary for mediating a variety of the myotrophic impact of androgens is yet to be decided. When utilized in excessive doses, both testosterone and anabolic steroids cause harmful modifications in cholesterol levels. They additionally have an affect on blood coagulation factors and hemoglobin, among other issues.
Over the years, it has turn into apparent that the endocrinology of skeletal muscle is extremely advanced, and there might be a delicate balance between synthesis and breakdown during growth, well being, illness and ageing, as considered by Sheffield-Moore and City (2004). Some of the structural modifications that have been launched into the testosterone in an attempt to maximise the anabolic impact and reduce the androgenic are shown in Determine 2, and examples of anabolic steroids (https://gamo-smeo.com/portadas/?hgh_kopen_1.html) are given in Figure three. Many of those steroids have been withdrawn as licensed merchandise in quite a few nations worldwide but they continue to be obtainable as pharmaceutical preparations in others, for example, methandienone, methyltestosterone, oxandrolone and stanozolol. The only preparations presently out there as licensed products for human use within the Uk are testosterone and its esters, nandrolone (as the decanoate ester), mesterolone and oxymetholone (named patient foundation only). Boldenone and trenbolone are restricted to veterinary purposes solely in some countries, however, nonetheless, sports activities competitors and bodybuilders have been identified to administer these anabolic steroids. Anabolic steroids are managed substances in several nations, including Australia, Argentina, Brazil, Canada, the United Kingdom and the Usa.
In addressing illicit use, all members want to be aware of the signs of steroid misuse and be prepared to counsel as essential to attempt to resolve the issue. In legitimate therapeutic use, the clinician will prescribe an agent based mostly on clinical necessity for a selected symptom or indication, and the pharmacist can confirm appropriate dosing and examine for drug interactions. Nurses can provide counseling on administration along with the pharmacist and monitor for antagonistic results on follow-up visits. These actions present the potential effectiveness of an interprofessional staff strategy to anabolic steroid use or misuse. Customers should additionally understand that the psychoactive results of anabolic steroids may be lethal, resulting in sudden bouts of anger, suicidal ideas, rage, loss of judgment, and extreme violence.[122] The abuse of anabolic steroids is a problem in any respect levels of schooling and includes each genders.
Any contribution from exogenous DHEA or androstenedione might be largely moderated by the large quantity of testosterone contributed by the testis. In ladies, a rise in performance could additionally be potential following ingestion of those supplements, as circulating testosterone would be expected to extend. The plasma concentration of endogenous testosterone is approximately 1/10th that found in men and the relative proportion arising from peripheral conversion of weaker androgens is far greater.
Corticosteroids discuss with both naturally occurring compounds produced by the adrenal cortex or artificial variations that mirror their molecular structure. Corticosteroids act on the immune system by blocking the manufacturing of substances that trigger allergic and inflammatory responses. The word «steroid» is a broad-ranging time period used to describe any compound with a particular molecular structure—in this case, composed of 4 fused rings of 17 carbon atoms. The perform of steroids is to both keep the integrity of a cell’s membrane or activate a receptor on a cell’s floor to regulate how it behaves.
Nowadays, except you might be prescribed testosterone (often as testosterone substitute therapy), steroids are illegal to purchase and promote. If you compete in sports, detection of steroids means an extended ban from competitors. Legal steroids, also referred to as multi-ingredient pre-workout dietary supplements (MIPS), are over-the-counter (OTC) supplements. They’re meant to help with bodybuilding and improve exercise performance and stamina.
Let’s take a glance at tips on how to recognize a legal steroid from an illegal one, what precautions to take if you plan to make use of legal steroids, and what different confirmed strategies you can use to construct muscle and power. In the tip, it’s often finest to reserve corticosteroids for later use, when the necessity for the medication may be far higher. To maximize advantages, corticosteroids are prescribed within the lowest attainable dose over the shortest period of time to attain the absolute best outcome. It was detected in two urine samples from an athlete (August 2001, March 2002) by Catlin et al. (2002). A US Authorities Investigation revealed that a chemist based in Champaign (IL, USA) synthesized this steroid and it was distributed by an organization known as BALCO Laboratories (see additionally the section ‘Designer steroids’). Structural modifications to the A- and B-rings of testosterone that improve anabolic exercise; substitution at C-17 confers oral or depot activity (i.m.).
The key to understanding the variations between these two substances lies of their chemical makeup, intended use, and potential unwanted effects. Whereas each of these substances aim to increase testosterone levels in the physique, they do so through completely different mechanisms and come with varying risks and advantages. Healthcare providers prescribe them for sure circumstances, such as male hypogonadism and sure forms of breast cancer. Anabolic steroids, usually out there solely with a prescription, are utilized by some folks (like athletes) and not utilizing a doctor’s steering to spice up muscle size, energy, and athletic capabilities.
Crisaborole (Eucrisa) is an alternative to steroids for gentle to reasonable eczema. It works by blocking the manufacturing of an enzyme that helps regulate inflammation within the pores and skin, which may provide relief from gentle to average eczema symptoma. Potential therapy choices embody topical calcineurin inhibitors, crisaborole, JAK inhibitors, and extra.
Alert your practitioner right away when you notice a rise in symptoms corresponding to ache, redness, swelling, or modifications in imaginative and prescient. The unique construction of each could make a difference in how it capabilities, what it treats, and what the side effects may be. Antifungal brokers may be categorised into a selection of different types, depending on their construction and the greatest way that they work. Many topical antifungals work by inhibiting manufacturing of ergosterol, a basic part of the fungal cell membrane and wall. Most antifungal agents treat both dermatophyte and yeast infections; nonetheless, some, similar to nystatin, are not appropriate for dermatophyte fungal infections. Tramadol is a prescription opioid ache reliever used for gentle to reasonable pain. Folks might use illegal synthetic cathinones on purpose—sometimes as cheaper or extra accessible alternatives to different drugs—or unknowingly, as contaminants in other medication.
These medications work in different methods, and a few inhalers comprise combos of different sorts of medications. Inform your physician in case your child isn’t rising at a traditional price while utilizing this medication. If you switched to fluticasone from another steroid medication, you should not stop using it all of a sudden. You should not use Flonase nasal spray in case you are allergic to fluticasone.
Buying legally with a prescription from a licensed pharmacy will typically be more expensive initially but offers the reassurance of quality, security, and legal compliance. However, many people get hold of steroids from the black market, the place costs could seem lower, however the dangers are considerably larger. These sources embrace online sellers, gyms, and different unregulated channels. These illicit sources usually promote counterfeit, mislabeled, or contaminated products, endangering your health. The probability of unwanted aspect effects occurring is expounded to the potency of the preparation, the place it is used, the condition of the pores and skin on which it is used and the age of the particular person utilizing it. All these factors will be taken into consideration when a prescription is given to deal with eczema.
Inflammatory processes increase which additional damages the cartilage and extra stress is placed instantly onto the bones in a joint. Pressure can cause the growth of bone spurs and bits of bone or cartilage might chip off and float across the joint. A one-month provide can range from $303–$346, with out insurance coverage.
Inform your doctor when you take another medicines, together with natural remedies and supplements, earlier than starting steroid tablets. You may be given a blue steroid therapy card that explains how you can reduce the danger of side effects. Xopenex (levalbuterol) is a short-acting beta-agonist bronchodilator that’s used three or 4 times per day in a single or two inhalations. It is used for the management of continual COPD and it could be used as a rescue inhaler as nicely. When used for COPD, the commonest side effects embrace upper respiratory infections, fungal mouth an infection, and bronchitis. Pulmicort (budesonide) is a corticosteroid that helps scale back inflammation in the airways, making it simpler for you to breathe.
Flunitrazepam belongs to a bunch of medicine called benzodiazepines. It is chemically just like prescription sedatives, but flunitrazepam isn’t FDA-approved for medical use within the Usa. Exterior the Usa, flunitrazepam is prescribed to deal with insomnia. Methadone, buprenorphine, and naltrexone are all FDA-approved drugs to treat opioid use disorder (OUD).Lofexidine is an FDA-approved treatment to reduce opioid withdrawal signs.
Using alcohol or tobacco with sure medicines may also trigger interactions to happen. Discuss along with your healthcare professional the utilization of your drugs with food, alcohol, or tobacco. Under is a list of all at present out there prescription topical therapies for eczema accredited by the Meals and Drug Administration (FDA) as of December 2024. Your doctor can provide you extra information on which remedy, or combination of therapies, could be handiest for you and the means to use every therapy. Under you will discover a chart of topical https://ltsv-brandenburg.de/news/clenbuterol_and_its_effects.html classified by their efficiency. Sometimes the steroid remedy is steadily stopped if the condition improves, and restarted if it worsens. Steroid medicines used to treat illness are additionally called corticosteroids.
There are currently no FDA-approved medications to treat inhalant use disorder. In addition to bronchodilators, anti-inflammatory medications, notably inhaled corticosteroids (ICS), play a role in COPD administration. Whereas not typically really helpful as a standalone treatment, ICS are sometimes prescribed together therapy for those with reasonable to extreme COPD. These embrace controllers that contain drugs known as corticosteroids (steroids), long-acting beta-agonists (LABAs), or anticholinergics, every of which works in a unique way.
Codeine is a prescription opioid ache reliever used for gentle to average ache. Combining benzodiazepines with alcohol, opioids, or other medicine increases their adverse effects. Barbiturates slow down the central nervous system and cause drowsiness. They also can decrease heart rate, respiratory, and blood pressure, which, in massive doses, can result in demise. Barbiturates are depressants which have been used to deal with seizure disorders, insomnia, and nervousness.
It’s easy to suppose that by calculating the half-life of a steroid, you can work out when it will now not be detectable in your physique, and you can then move a drug check with flying colours – right? Detectable metabolites will remain round longer within the physique the more a steroid hormone is proof against metabolism. Ultimately, the physique will metabolize and excrete the steroid fully, but there is no set period, and this issue will differ between people. Some steroids are identified to be more resistant to the body’s metabolism than others, a notable instance being Trenbolone. Some of those steroids can exit the body in the urine without having been metabolized, producing a powerful constructive result for a protracted period of a quantity of months.
While you should use topical androgen blockers to try to stop hair development, will in all probability be a case of dropping the PED dosage or stopping use completely for most ladies. Any state of affairs where you’re growing body/facial hair is one the place your dosage is simply too high, and the simplest repair is the obvious one talked about above. Some steroids are stronger on this effect than others, however all males will want to deal with this facet impact regardless of which compound is being used. You can only inject smaller amounts of liquid through this method, not like the higher amount of steroids that can be injected intramuscularly.
Nonetheless, the options supplied on our list of the most beneficial authorized fat cutter steroids (https://arenafan.com/js/pgs/?best_supplements_to_get_shredded.html) in Australia 2025 can be found to be bought and not utilizing a prescription. Total, by taking steroids that are natural, you’ll achieve the identical benefits as anabolic steroids without the harmful unwanted effects. We meticulously reviewed the safety profiles of the elements in each supplement to reduce the risk of unwanted facet effects.
Clenbuterol stimulates the nervous system, triggering lipolysis by way of the method of thermogenesis. A user’s body core temperature rises for a number of weeks, rising their basal metabolic rate and calorie expenditure. This can also be readily obvious, because the epidermis could seem flushed or reddish in colour.
If persons are thinking about natural steroid supplements, the most secure possibility is to consult with a physician earlier than taking any dietary supplements. Anadrole works in a means that is thought of unique in comparison with different steroidal dietary supplements. Most of these dietary supplements work by rising muscle protein synthesis.
However if you’re new to all this, you could be surprised to be taught that Anavar is derived from DHT. Despite this, Anavar does NOT come with the potent androgenic unwanted effects of most other DHT-derived steroids. It’s undoubtedly the most well-liked anabolic steroid with feminine athletes of different sorts. The usual TRT dosage of Testosterone cypionate is between 100 and 200mg weekly. You might even run a low dose of HCG for further support, one thing like 100iu each different day. You can always run one thing else alongside the Take A Look At, like Deca-Durabolin.
YK-11 can suppress testosterone however is very dose-dependent and individual-dependent. RAD-140 is the extra suppressive of those two compounds, so you have to put together your PCT plan for the tip of this cycle. Then, you additionally add injectable testosterone and PCT with Clomiphene (Clomid) and Tamoxifen (Nolvadex). The addition of injectable testosterone is to have a quality testosterone base that also helps together with your joints and total well-being. SARMs are various sufficient to be effectively utilized in all types of cycles. Select the right SARM or SARMs to include in your cycle, at the right dose, for the proper size of time, and optionally mix with suitable and complimentary SARMs or other compounds.
Dianabol was traditionally identified for its muscle boosting capabilities. So once we tell individuals to try D-Bal for energy applications, it takes them unexpectedly. Most former Dianabol users have now shifted to D-Bal and they are really amazed at how comparable it is to the unique, with 100% less risk. Individuals who have resumed energy coaching after an extended gap and were struggling to add power, have discovered that they can crush new PRs easily with D-Bal.
Zhou Diet makes a great sexy goat weed complement, because of its inclusion of different hormone-boosting compounds like Tribulus terrestris and saw palmetto. If you compete in sports activities with performance-enhancing compound insurance policies, DHEA is a no-go. Of the DHEA dietary supplements in the marketplace, Havasu Diet makes the most effective. Our analysis team has combed via the scientific literature to determine the most effective natural steroids you might get. With a low value and excessive potency you can be certain that HGHx2 will offer you power, energy and improve vitality.
They use premium natural ingredients which would possibly be backed by the latest analysis to ship optimal results. By offering anabolic results, authorized steroids help bodybuilders and athletes achieve their desired physique and health goals with out compromising their health. Using authorized steroids for muscle development is the safer method to acquire your health goals. Lastly, it’s your alternative how you want to progress on the path to lean muscle features.
At All Times consult with a healthcare provider earlier than beginning any new complement routine, especially when you have existing well being situations or take medicines. Beneath, beginner-friendly, secure steroid cycles are outlined to avoid any issues and encourage long-term progress. Oral steroids, like Dianabol, provide quick features but can strain the liver, while injectable steroids, like Trenbolone, provide longer-lasting results with much less frequent dosing. On high of that, oral steroids can be powerful on your liver, and improper use could trigger liver toxicity over time.
These options can help construct muscle without the risks linked to anabolic steroids. Frequent decisions embrace merchandise that use components like creatine, protein powders, and branched-chain amino acids (BCAAs). D-Bal by CrazyBulk is doubtless certainly one of the strongest legal steroids for enhanced muscle growth obtainable available on the market. Using anabolic steroids for muscle constructing with no prescription is illegal in lots of places. However, authorized alternate options, known as «legal steroids,» mimic their results without legal dangers or extreme unwanted aspect effects.
Bodybuilders typically report gaining kilos of mass in only a few weeks when using Dianabol. It’s perfect for beginners and experienced users alike, making it the spine of many bulking cycles. Plus, its capacity to reinforce glycogen storage means you’ll have more energy for these heavy, grueling exercises. What makes Winstrol so efficient is its capability to protect lean muscle while your body burns via fat shops.
This means, you can avail of special discounts, free delivery, a money-back assure, and heaps of different exciting offers. Take 4 capsules with water before a workout, and use a minimum of three bottles earlier than expecting good outcomes. This formulation is generally well tolerated by the physique and causes no side effects. Testo-Max must be taken within the morning about 20 minutes previous to your breakfast. Take four capsules for two months—even on days you do not work out—and then take 10 days off. With DecaDuro, D-Bal and Trenorol, you want to take three capsules each with water roughly forty five minutes earlier than your workout.
Nevertheless, if we had been strictly weighing up the professionals and cons of every steroid, testosterone could be first. Dianabol has a big adverse impact on ldl cholesterol and blood stress, based mostly on our patient’s blood work. This is due to Dianabol being an oral compound that causes water retention. In our expertise, testosterone suppression with Dianabol is typically vital, with endogenous ranges taking a number of months to restore to regular levels. A PCT, including a SERM similar to clomiphene, can help shorten this restoration interval. Dianabol is a C-17 alpha-alkylated https://www.texaspainphysicians.com/news/eetlustremmers_2.html, and thus liver toxicity is for certain, primarily growing the workload on the organ.
When taken within the body, anabolic steroids cause protein building in cells and lead to cell tissue improve in muscle. Use of anabolic steroids can, however, intrude with the steadiness of hormones that occur naturally inside the body and lead to a selection of possible unwanted aspect effects. For instance, Dianabol is a fast-acting oral steroid that promotes speedy muscle growth, while Trenbolone and Testosterone provide long-lasting, dense muscle positive aspects. Deca-Durabolin not only supports muscle development but in addition improves joint health, making it best for heavy lifting cycles. Together, these steroids ship powerful results for anybody seeking to pack on serious size. When you hear about steroids, you might think of bodybuilders and weightlifters chasing huge measurement and power. But steroids aren’t just for constructing massive muscles—they’re also utilized by athletes seeking to improve their athletic performance and acquire an edge of their sport.
Dianabol additionally boosts power considerably, allowing users to push heavier weights and train tougher within the gym. We needed to concentrate on the manufacturer of the steroids that we chosen. For the greatest possible outcomes and to ensure that you’re completely satisfied, we selected 5 well-known corporations which have acquired positive feedback and ratings across the web. Your muscular tissues will have the flexibility to operate extra effectively as a end result of beta-ability sitosterols to extend glucose consumption.
Although primarily found in nature, many of the laxogenin available in supplements is an artificial model, known as 5a-hydroxy laxogenin or laxosterone. It Is intriguing because it’s thought to kickstart muscle progress and protein synthesis by activating particular pathways within the body, much like flipping a swap to turbocharge your positive aspects. What’s more concerning is that many legal steroid supplements don’t totally disclose their product ingredients on the label. This lack of transparency puts you vulnerable to consuming unsafe components that might lead to severe opposed results. Earlier Than you contemplate legal alternate options to spice up your strength and muscle mass, you’ll want to understand what’s真the and what’s advertising hype. When choosing authorized supplements for muscle development, it’s necessary to look for proven components similar to protein, creatine, and BCAAs. Dietary Supplements work alongside proper food regimen and exercise for muscle progress help.
The firm will establish the entire dose (in grams or milligrams) of the blend, but they don’t disclose the precise amounts of each ingredient inside the mix. One of the commonest unwanted side effects attributed to pre-workout use is pores and skin tingling that ranges from a light-weight flush, or tingle, to more intense itching. Or Clear Labs Stim-Free or Pump for late-night exercises or jitter-free energy (more below). I advocate starting with Clear Labs Bulk if you’ll like a clean, clinically dosed formula with 200mg of caffeine and no artificial junk. Pump pre-workouts can be utilized on their own, however many corporations will formulate them to also be utilized in tandem with their full-spectrum pre-workouts. This class of pre-workout can be stim-free, however has one key thing separating it from the others.
This is a native Chinese Language herb and for a quantity of years it has been praised because of its medicinal advantages. It notably helps lower sugar ranges within the blood in addition to enhance sugar metabolism, leading to steady weight reduction. Did you understand that the supplement brand Bucked Up may contribute to or trigger a optimistic urinalysis result? This supplement may include the DoD-prohibited substances IGF-1 and the anabolic steroid methandienone. IGF-1 might be present in supplements like the Bucked Up brand that include deer velvet. Avoid it, be aware of what you set in your body, and examine Operation Complement Safety at opss.org for any potential issues along with your dietary supplements.
When used persistently alongside correct vitamin and training, pre-workout supplements can lead to more productive workouts, permitting you to push harder and recover higher. This improved training quality interprets to constant progress toward your health targets over time. DMAA (methylhexaneamine) and anabolic steroid derivatives have been banned by main sports activities organizations and the FDA because of their extreme health risks. These substances drastically constrict blood vessels, probably resulting in cardiovascular emergencies, strokes, and coronary heart attacks. Athletes using dietary supplements containing these ingredients risk not only their well being but in addition failed drug tests and aggressive disqualification.
If the answers to your questions are satisfactory, then the model may be a smart choice. Many customers select to run one or both SERMs depending on their cycle length and compound intensity. Doses past this range significantly enhance threat without guaranteeing higher outcomes. For 95% of customers, particularly beginners and intermediates, the base compound must be testosterone. Done incorrect, stacking can wreck your hormones, tank your lipids, and go away you chasing diminishing returns.
Nonetheless, it is potential to maintain a once-daily dosage schedule with no negative issues. Most male rivals could have between 3% and 5% body fats during competitions. Bear In Mind that these are essentially the most extreme customers, and they are likely to make use of different compounds alongside or instead of Anavar. I kept a reasonably good food plan along with them since, after all, that is 90% of the process.
Sometimes, they even include cheaper compounds, like Winstrol or Dianabol, and even elements that aren’t even http://oldweirdherald.com/news/to_lose_weight_anabolic_or_catabolic.html. If your physique fats is very excessive (or you’re a higher-weight person), it’s ideal to attempt to lose as much weight as possible earlier than utilizing a steroid – remember that Anavar isn’t a weight reduction miracle drug. Ideally, you will need to already be round 15% physique fat before using Anavar. This steroid causes an increase in purple blood cell manufacturing, which gets more oxygen to the muscular tissues.
Service members ought to avoid merchandise that comprise these elements as a result of they’re listed as DoD Prohibited Dietary Supplement Elements. The FDA regulates dietary dietary supplements as foods, not medicine, so the query is whether Bucked Up Pre-Workout is FDA-approved. This indicates that the FDA is definitely not permitted to «approve» dietary dietary supplements which are launched onto the marketplace for their efficacy and security.
The Anavar/Clen combo is nice enough to get you some impressive weight loss outcomes. Keep Clenbuterol to 50mcg daily and run it in 2 weeks on/2 weeks off pattern. Anavar at 10mg/day for 6-8 weeks is sweet, and you most likely won’t have any side effects. As for the most effective time to take Oxandrolone, split it into two doses day by day at 5mg/each (once with breakfast and once more earlier than bedtime).
Research additionally warns against Citrus aurantium (bitter orange), Yohimbe extract, and Garcinia cambogia extract, which have been linked to cardiovascular and other health considerations (Marques & Capela, 2022). These components can pose critical health risks including cardiovascular issues, liver harm, and harmful side effects with out providing additional efficiency benefits. Post-workout consumption of oral steroids can be advantageous for muscle restoration and progress. After an intense workout, the body’s natural testosterone production may be suppressed.
resume electrical engineer engineer resumes
«Juice» refers to oral and injectable forms, capturing the essence of pumping one thing powerful into your body. «Gym candy» highlights how these medicine are perceived as enhancements for gym-goers, making them sound nearly like a deal with somewhat than a probably dangerous substance. Avenue names make these substances sound less formal and extra covert.
Other drugs may work together with prednisolone, including prescription and over-the-counter medicines, nutritional vitamins, and herbal products. Tell your physician about all your present medicines and any medicine you start or cease utilizing. Steroid medicines might enhance the glucose (sugar) ranges in your blood or urine. You can also need to adjust the dose of your diabetes medications. Nevertheless, they are not typically sources of energy; in mammals, they are usually metabolized and excreted. Utilizing this medicine with any of the following medicines is normally not really helpful, but may be required in some instances.
This drugs may cause a serious allergic response known as anaphylaxis, which could be life-threatening and requires instant medical uses of anabolic steroids (https://www.augredesoi.fr/art/winstrol_achat.html) consideration. Call your physician immediately when you have a rash, itching, hoarseness, hassle respiratory, hassle swallowing, or any swelling of your palms, face, or mouth after using this medication. Prednisolone is a steroid drugs that’s used to alleviate the redness, itching, and swelling brought on by eye infections and other conditions. «Juice» is one other acquainted time period, usually making steroids sound like an energy-boosting drink somewhat than a dangerous substance. Lastly, «Weight Trainers» and «Gear» may trick you into considering they’re just regular fitness center tools. Another well-liked time period is «Gym Sweet.» It makes it sound like a sweet treat, however remember, it’s far from innocent.
Corticosteroids are produced within the adrenal gland situated above the kidney. Steroids are a category of natural compounds that play roles in various organic processes. Their significance extends beyond pure capabilities, as they have medical purposes ranging from hormone alternative therapies to anti-inflammatory treatments. Understanding steroids is crucial for appreciating their impact on well being and disease administration. Corticosteroids work rapidly and effectively, which is why they’re usually used for a short while until different drugs kick in or to stop a illness flare in its tracks.
Wear a medical alert tag or carry an ID card stating that you just take prednisolone. Any medical care supplier who treats you should know that you just take steroid treatment. Your dose wants could change in case you have uncommon stress corresponding to a critical illness, fever or infection, or if you have surgery or a medical emergency.
There aren’t any adequate studies in girls for figuring out infant danger when utilizing this treatment during breastfeeding. Weigh the potential benefits against the potential dangers earlier than taking this medication whereas breastfeeding. Excessive blood sugar (hyperglycemia) is a symptom of some corticosteroids. High blood sugar may cause fatigue, thirst, and frequent urination among other signs. Corticosteroids can even interfere with many different bodily processes, from your bones to your blood strain.
For a complete listing of extreme side effects, please refer to the individual drug monographs. They are very comparable, though prednisone gets transformed by your liver into prednisolone after you swallow it. Use only the model of this medication that your doctor prescribed. The data beneath refers to merchandise available within the Usa that include cortisone. Exploring the intricacies of steroid biology can present useful insights into both their natural capabilities and potential therapeutic uses.
In many locations, possessing or distributing anabolic steroids with no prescription is unlawful. The scenario is not solely harmful to your health but additionally to your freedom. The configuration of these rings and the stereochemistry of the connected groups are pivotal in figuring out the biological operate of a steroid.
Стильные решения для корпоративной сувенирной продукции с логотипом
сувениры с логотипом https://suvenirnaya-produktsiya-s-logotipom-1.ru .
I like the helpful information you provide in your articles.
I will bookmark your blog and check again here regularly.
I’m quite sure I’ll learn a lot of new stuff right
here! Good luck for the next!
The packaging etc was discreet, there have been no considerations with the transport itself. Nonetheless, I recommend curbing your excitement as you put together your self to attend for over a month for something you order. The customer service was great, nevertheless it was always initiated by me. And even when I requested it was more ‘please be patient’ responses. Anyway, ultimately the top quality merchandise arrived intact, however not with out undue stress at the extreme wait time. Over-the-counter testosterone supplements are the strongest authorized steroids, as they enhance T-levels to generate skeletal muscle progress. Legal steroids are a safe, pure way to build lean muscle with out the serious unwanted facet effects of illegal anabolic steroids.
There’s 1,500mg of arachidonic acid per three capsules from the 30-serving container, providing wonderful anti-inflammatory effects. Every serving has a whopping 2,352mg of D-aspartic acid that helps with testosterone manufacturing and launch. Clenbuterol notably increases coronary heart price in our patients, which can also be supported by research (8). This occurs because of extreme adrenaline manufacturing, placing pointless pressure on the center. From a security perspective, we discover Winsol to be the higher possibility, with none of the above unwanted effects being a trigger for concern.
For finest results, we discover that Anadrole ought to be combined with other authorized bulking steroids, corresponding to Decaduro, Testo-Max, D-Bal, and/or Trenorol. Crazy Bulk’s Anadrole method is synthesized to mimic the anabolic effects of Anadrol but without the harsh side effects. Muscle, weight, and strength features on Anadrol are sometimes unsurpassed, with Dianabol being the one compound that comes shut in our expertise. If there’s one factor Loopy Bulk may do to enhance, it will be to decrease their prices even additional and improve their common evaluate score from four.4/5 to 5/5. We stalked what people were saying about Loopy Bulk on social media. To do that, we entered ‘#crazybulk’ and #dbal, together with different product names, into Instagram, Twitter, and Facebook.
Testol one hundred forty is a Loopy Bulk complement that mimics the results of Testolone, a SARM that’s turn out to be popular amongst athletes and bodybuilders. A Number Of research have confirmed that zinc supplementation improves physical performance and reduces recovery instances. It’s straightforward to use, it’s inexpensive, and it’s extremely effective. I’ve personally tested all these dietary supplements for at least a month and can explain beneath why I advocate them if you’re seeking to construct muscle fast. «This evaluation is about supply I ordered my product final week and it is already right here I am excited to begin using. I will submit another review in a quantity of weeks regarding quality.» Constantly delivering top quality https://paladarplus.es/pgs/comprar_winstrol.html and anabolics to Canadian athletes since 2012, Roidrx is your reliable and trusted partner in growth. Let’s additionally assume that at this stage you’ve accomplished your homework and know exactly what quantity of vials of injectables you need and what number of tabs are required in your cycle and PCT.
Totally Different anabolic steroids come with compound or class-specific and unspecific antagonistic events. Importantly, there are more than 60 completely different anabolic androgenic steroids listed on the WADA prohibited list and novel compounds are frequently detected in the marketplace. Literature suggests that 25–40% of AAS users demonstrate AAS dependence [6, eight, 9, 14]. It is described as steady or continual AAS use, despite distinguished adverse medical, psychological, or social effects [6]. Our educational content helps you identify safe merchandise, select the proper cycle, and avoid harmful mistakes.
Relying on the sort of steroid, in eight weeks cycle, there should be 4 weeks of on-steroid complied with by 4 weeks of off-cycle. Usually, many steroids call for an off-cycle to be twice so lengthy as the on-steroid cycle. For instance, when you had been on a 6 weeks cycle, the off-cycle has to be of 12 weeks. There are two sorts of cycles– an on-steroid cycle and in addition an off-steroid cycle. If your cycle lasted for 12 weeks, it is extremely important to be off cycle. The best top quality of steroids is that it lets you construct a toned physique. There is not any a lot better steroid than Anavar to lose undesirable fats.
The only other noteworthy competitor on social media was SDI Labs, with 2,994 Fb fans, and Flexx Labs, with 1,671 followers. You can also purchase injectable steroids on mega-steroids, this website is basically sure and where you presumably can generally get discount, so we advocate you to visit the positioning for extra informations about that. If you’d prefer to problem the belief rating assigned, we’re joyful to take a extra in-depth look. Nonetheless, please be ready to supply proof of your business’s legitimacy. Please observe, we never charge web site owners for evaluations or reconsideration requests. The web site implements data assortment varieties requesting personal data including names, e-mail addresses, telephone numbers, or other sensitive particulars. Customers ought to verify the legitimacy of steroidsuser.com and evaluate privateness policies before submitting private knowledge.
TBulk has been a superb supplement for helping me construct muscle, and I advocate it to anybody looking to do the identical. Trenbolone, additionally recognized simply as ‘Tren,’ is certainly one of the most popular steroids for fast muscle features. If you’re serious about bodybuilding and wish to get essentially the most out of your exercises, DBulk is worth attempting. I’m impressed with TestoPrime and extremely suggest it to anyone who desires to construct muscle and really feel great. In Distinction To steroids, TestoPrime helps your body produce the optimum amount of testosterone on your age.
Its primary purpose (as you’d expect from its name) is to advertise progress. It was extracted from human cadavers within the earliest phases of HGH use. However when degenerative brain illness was found in deceased HGH sufferers, that type of HGH extraction was ceased, and biosynthetic HGH was developed and used for medical functions. Androstanolone (dihydrotestosterone; DHT) and esters usually are not available within the United States. Steroids work by binding to androgen receptors in muscle cells, which triggers a cascade of biological processes.
If you are taking anabolic steroids outdoors of a doctor’s care, you might have severe side effects that can have a adverse impression in your well being. Discuss to your doctor about possible treatment plans if you’re apprehensive about misusing steroids. Injectable steroids offer many benefits to bodybuilders and athletes alike. They can present increased muscle mass, improved strength and efficiency, and lowered body fats. In addition, injectable steroids can enhance skin high quality, enhance athletic coaching results, and reduce the chance of conditions similar to osteoporosis. Most of our clients are long-term steroid users and even skilled bodybuilders.
On 21 March 2009, Klitschko defeated Juan Carlos Gómez by TKO in the ninth spherical. Gómez tried to did schwarzenegger use Steroids — https://virginiav.org/news/is_dianabol_legal_or_banned.html — his movement to thwart Klitschko however seemed unable to cope with the ability and bodily power of his opponent. As the rounds progressed, Klitschko started imposing himself on Gómez increasingly more. Gómez quickly became wary of Klitschko’s energy and in addition started to tire physically. The end came when the referee stopped the struggle in the ninth round as Gómez appeared unable to withstand any more hits.
Testosterone will elevate the metabolic fee of the user which results in the burning of body fat while at the same time bulking up lean muscle mass. Body-building-anabolics is an online pharmacy that legitimately sells injectable testosterone. This is probably considered one of the trusted websites to buy real steroids on-line and have the medicine shipped to either your own home or workplace.
This complete guide will empower you with data on where to purchase anabolic steroids safely and successfully, emphasizing quality, trust, and your personal fitness objectives. Corticosteroids for these associated ailments and anabolic steroids stimulate muscle growth and athletic performance. We will contact you as soon as possible to confirm your order details and offer various cost strategies to finalize your order. Our sports activities supplement retailer specializes in offering anabolic steroids for sale in the US. At gearstore.biz, we inventory a large assortment of anabolics for people who want to look in the mirror and see a beautiful figure. Pharmahub is a distribution network for various pharmaceutical suppliers.
Our primary goal is to help you obtain your muscle-building, bulking or weight reduction objectives safely. Like most different sites, our on-line steroids store sells anabolic and androgenic substances without a prescription from a doctor. But it’s value considering that to purchase steroids in the USA, full payment is required earlier than any orders are shipped out. Since in most nations, steroids on the market are considered sports doping or prohibited for implementation, so prepayment is the most effective and most secure approach to protect both parties, the client and the vendor. If you need to push past limitations and feel you’ve reached a brick wall together with your progress, HGH can get you previous that time and on to experience results that aren’t in any other case attainable solely with steroids. HGH, when used appropriately at moderate doses for limited durations, doesn’t include the severe unwanted facet effects that we see with most anabolic steroids. Some individuals will experience negative impacts, largely joint ache, complications, and flu-type symptoms.
Yourmuscleshop.com has legit lab-tested products but quality isn’t assured. They even have 24/7 customer support and free recommendation with any purchase. They have had over 3500 customers and 5800 deliveries worldwide over the past few years, in order that they declare however we may NOT confirm this. Their staple brand is GenLabs and it ships from the USA from a warehouse.
All packages are sent through Xpresspost and clients are given a tracking number that can be tracked. Order tracking didn’t update until about two days away from supply. HGH requires persistence to see results as a end result of it takes many months to see its full benefits. HGH cycles are beneficial to be a minimum of three months in duration and sometimes up to six months for max benefit.
Crazy Bulk’s Clenbutrol replicates the stimulative results of Clen to spike a user’s metabolism. As A Outcome Of Winstrol does not have an overly significant impact on constructing mass (7), we see it usually utilized in chopping cycles to help retain muscle while getting leaner. Winstrol has diuretic results too, increasing muscle striations and the visibility of veins (vascularity). The solely downside to its water-flushing properties is that glycogen levels can lower contained in the muscle cells, reducing fullness. Anavar is a light steroid; therefore, the gains users expertise will not be exceptional, and the same applies to its unwanted aspect effects. Trenbolone can also be a powerful fat-burning steroid and is thus sometimes used in cutting cycles too.
Lastly, we can’t examine HGH and Anavar without discussing the cost. HGH is probably the costliest compound to buy, and the reality that you have to use it for months on finish to get respectable outcomes adds to that cost. It can simply set you again many thousands of dollars to a 4-6 month HGH cycle. HGH can be injected either subcutaneously or intramuscularly, and the half-life differs very slightly between the two. Either way, HGH has a really short half-life – just below 4 hours for sub-cut injections and just under 5 hours when injected IM. However if you want most bioavailability (and who doesn’t?), then subcutaneous injections are the means in which to go – they’ve up to 75% bioavailability in comparability with round 63% for IM injections.
Nevertheless, girls ought to keep away from products with strong androgenic results until specifically formulated for feminine use. If you’re in search of an oral legal steroid that can construct dry, dense muscle, strip away fats, and increase raw energy, Trenorol is your top-tier decide. Modeled after Trenbolone, one of the most potent anabolic steroids in historical past, Trenorol brings multi-functional efficiency to your cycle — without the hormonal chaos. Many legal steroids in the marketplace are nice at promoting measurement — but not all of them deliver brute energy. While compounds like Deca Max are wonderful for constructing high quality muscle, they don’t essentially increase muscle output or power manufacturing. Unlike its legal steroid counterpart, D-Bal doesn’t pose any dangerous unwanted facet effects. As A Substitute of that, the product delivers a pure and secure alternative.
D-aspartic acid is an amino acid recognized for its function in testosterone production. This essential element triggers the release of luteinizing hormone (LH), which in turn stimulates the Leydig cells within the testes to provide more testosterone. A wholesome LH degree promotes elevated natural testosterone manufacturing and improves general performance. To maximize fat loss and weight loss, customers ought to eat in a calorie deficit (-500 energy per day), which may also maximize muscle retention. We have found that calorie deficits greater than this (starvation diets) can lead to water storage and muscle loss.
One of its more enticing attributes is that in comparison with different anabolic steroids, its unwanted effects aren’t that unhealthy. Tren really reduces body fat by preventing the production of cortisol, and cortisol is detrimental to muscle development and the burning of fats cells. Most of the time, these amino acid supplements are taken half-hour before starting a workout. D-Bal has a variety of efficient ingredients that assist construct muscle and lose fat. This supplement additionally lowers ldl cholesterol and raises VO2 max, which is probably the most oxygen the body can use when working out. Testo-Max raises testosterone levels with a strong mixture of D-aspartic acid, zinc, vitamin D, and a variety of other different efficient components.
Long-term use can lead to hormonal imbalances, liver stress, and cardiovascular issues. Legal, over-the-counter alternatives are a safer choice for most individuals. Individuals might have heard that professional athletes generally take multiple steroid at once to strengthen their total muscle-building effects. Steroids, then again, can have several bad unwanted side effects and are illegal if users don’t have a prescription. CrazyBulk Bulking Stack is recommended for those in search of a group of supplements that may assist them construct muscle and provides results just like these of steroids.
We have found trenbolone to own distinctive muscle-building and fat-burning results, making it a strong bulking or chopping steroid. Its spectacular fat-burning capabilities can be attributed to its robust androgenic nature, with androgen receptors proven to stimulate lipolysis in adipose tissue (3). This happens due to a rise in beta-adrenoceptors and adenylate cyclase activity. Nevertheless, virilization instances did sporadically seem, particularly when feminine athletes began combining Turinabol with other anabolic steroids, corresponding to testosterone and Deca Durabolin. In abstract, older bodybuilders can achieve important muscle positive aspects with steroid use, however it comes with risks and must be done beneath medical supervision.
There are not any banned substances in any of Crazy Bulk’s legal steroids; subsequently, users will move any kind of drug test while taking them. In our expertise, using Decaduro alone is not going to yield significant muscle positive aspects. Thus, for max muscle hypertrophy, stack Decaduro with D-Bal, Anadrole, Trenorol, and/or Testo-Max. D-Bal was formulated by Loopy Bulk to replicate Dianabol’s optimistic results however with out the opposed effects. This permits bodybuilders to stay wholesome while constructing muscle, instead of destroying their well being within the short or long term.
With a 150-day supply per bottle and 3rd celebration lab testing, these supplements are a dependable selection for anyone trying to improve their athletic efficiency. In conclusion, authorized steroids are a protected and effective alternative to anabolic steroids for those trying to reach their health objectives. Products like D-Bal, HGH-X2, Winsol, Testo-Max, and CCUT provide pure options that will not endanger your short-term or long-term well being. Testo-Max is a safe and legal testosterone booster that may assist men enhance their general health and health ranges. In Contrast To anabolic steroids, Testo-Max is produced from natural ingredients corresponding to Nettle Leaf extract and Fenugreek,(7) which work together to boost your physique’s pure testosterone manufacturing system. In this article, we’ll explore the most effective and most secure authorized steroids for muscle building, weight loss, increased stamina and endurance. Learn on to learn extra in regards to the effectiveness and highly effective bennefits of the these 100 percent pure steroids.
Authorized testosterone steroids can play a crucial role in achieving these objectives effectively and safely, without resorting to illegal anabolic http://jointjedraaien.nl/images/pages/?anavar_kopen_1.html. Authorized testosterone steroids play a vital function in bodybuilding, helping athletes to realize their desired results when it comes to muscle mass, energy, and performance. These steroids are designed to imitate the effects of pure testosterone in the physique, resulting in a rise in muscle development, lean muscle mass, and overall athletic performance. These supplements provide comparable advantages, including increased muscle mass, enhanced strength, and improved endurance, whereas lowering the risk of well being problems. Protected legal steroids work by providing the body with natural elements that mimic the results of anabolic steroids without the harmful unwanted facet effects.
Dianabols major claim to fame is its capacity to dramatically elevated testosterone levels. Not solely will this assist you to to develop stronger, but it may simply give you an enormous surge of performance within the gym – especially with heavy weights and low reps (hypertrophy training). Black pepper extract allows for higher bioavailability to extend the overall potency of the person compounds.
Many users start to note results inside the first 7–10 days, such as improved pumps, increased drive, and enhanced stamina. This makes D-Bal a super kickstarter compound, particularly if you’re working a pure or oral-only stack. Lastly, oral steroids are a few of the quickest acting compounds on the earth of authorized steroids. You need quick results and these steroids are the best way to get it done. With these dietary supplements, gaining muscle tissue with out bizarre side effects isn’t theoretical.
Научно-популярный сайт https://phenoma.ru — малоизвестные факты, редкие феномены, тайны природы и сознания. Гипотезы, наблюдения и исследования — всё, что будоражит воображение и вдохновляет на поиски ответов.
From anabolic steroids to SARMs to peptides and ancillary drugs, I’ve done it sooner or later in my life, and I can relate. Anabolic steroids, when used by females, lead to the development of male physical options. Though she won’t turn into a person, this powerful androgen, when used at excessive doses or for too long, will take away femininity and cause a woman to look and sound very different. The unwanted effects of Winstrol, that are just about a certainty for all users, will nearly always be the idea for unfavorable critiques and experiences with this steroid.
In contrast, our doctors prescribe therapeutic doses for correcting testosterone deficiency. Testosterone will suppress endogenous testosterone production post-cycle, probably causing hypogonadism. We discover it could possibly take 1–4 months for pure testosterone levels to recover, relying on the dose, length of cycle, and how often the individual administers steroids. A PCT just isn’t needed when taking legal steroids or steroid alternate options, as they will not shut down women’s pure testosterone production. Such reductions in fat mass are one of many explanation why Anadrol can generally be used as a chopping steroid. We have discovered that when customers undertake low-sodium diets, they will maintain extracellular water retention at bay while growing intracellular muscle quantity. Oral steroids stimulate hepatic lipase within the liver, further decreasing high-density lipoprotein (HDL) ldl cholesterol and thus exacerbating blood stress.
D-Bal is a natural supplement designed to duplicate the muscle-building results of Dianabol without the dangerous unwanted side effects. Anadrol is certainly one of the most poisonous steroids we have come across, with even skilled bodybuilders struggling to tolerate it. Even although Anavar is an https://gazetablic.com/new/?what_to_take_with_dianabol_to_stop_side_effects.html compound (like testosterone undecanoate), it’s not notably liver poisonous. In Anavar’s case, it’s because the kidneys help to course of oxandrolone, decreasing the hepatic toxicity and workload on the liver.
This injectable steroid is especially used during bulking cycles as a outcome of it including massive quantities of muscle hypertrophy and strength. With the proper mixture of diet, exercise, and rest, these authorized steroids might help to maximise your muscle progress and rapidly allow you to attain your required health goals. This, combined with a great food regimen and train program, can lead to elevated muscle mass, improved definition, decreased body fat, and extra testosterone. SARMs (Selective Androgen Receptor Modulators) are compounds with a similar construction and performance to anabolic steroids but with fewer and milder side effects. Keep In Mind that each steroid has its own dosage suggestions, so it’s up to you ways safe and efficient your cutting cycles shall be. However, it’s important that every one the constructive results of getting rid of fat usually are not overlapped by fluid retention.
This is a product which is made from 100 percent pure elements and immediately, which means there are not certainly one of the nasty unwanted side effects which are so commonplace with «standard» steroids. Now that we have spoken concerning the «real steroid», it’s time to forged our eye over another which is not going to jeopardize your well being. This comes within the type of D-Bal and like the entire suggestions which may be donning this guide, it’s out there from Crazy Bulks. Some of you could be thinking at this level that the effects of authorized alternate options are going to be so weak that they won’t be price turning to.
Though it’s possible to make use of individually, it’s extra frequent and efficient to combine anabolic steroids right into a cutting stack. It is very advised to make use of a STEROID STACK on a slicing cycle, this permits the advantages of each to be amplified. When cycled together, fats loss, muscle positive aspects, and energy will be enhanced (as opposed to running a Winstrol-only cycle). This is a powerful chopping cycle when making an attempt to drop body fat levels rapidly without shedding muscle or energy.
Your private well being standing is a key issue in the safety of anabolic steroid use. Pre-existing well being circumstances like liver or kidney problems, heart problems or hormonal imbalances can have an result on the suitability of sure steroids. One of the vital thing factors within the safety of androgenic anabolic steroid use is following beneficial dosages. Testosterone is a synthetic version of the male hormone testosterone, which is essential for muscle progress and power.
The cause why Dianabol is so popular is as a result of it really works in so many different ways to make bulking easier. First and foremost, it synthesizes protein, and as we all know protein is a key building block in muscle growth. Not only this, but it additionally permits your muscular tissues to retain more nitrogen and once more, that is key in allowing your muscular tissues to develop faster than average.
Look at my site — HighStakesDB
Nandrolone Decanoate (Deca) is considered one of the most widely used androgenic-anabolic steroids. Studies have proven that Nandrolone increases muscle mass in male bodybuilders21. Suppose of anabolic steroids, and the name Dianabol (Dbol) is usually the first to return to your thoughts. It’s lengthy been the most well-liked and revered steroid, and for http://circulosdelavida.es/pages/oxandrolona_comprar_3.html reason. The majority of anabolic steroids you hear about are one kind or one other of testosterone and normally synthetic derivatives of testosterone. This hormone increases muscle dimension and power, and a testosterone-only cycle is usually the first step taken by a new steroid consumer.
Expect a tough, outlined physique, fast recovery, some fats loss, and incredible strength. Despite the names’ similarity, HGH-X2 is very completely different from its illegal prototype. As a outcome, you’re getting an elevated, yet safe and wholesome HGH-level. It also stimulates your efficient digestion of high-protein meals and increases protein consummation.
I learned so much in this subreddit and also you have been extremely patient answering my (sometimes stupid) questions. This has been my second cycle, I began fairly late (31) — nonetheless have a lot to be taught. In the primary ~3 weeks I had actually unhealthy PiP, was sweating like a pig and awoke each 1-2 hours to piss.
This particular person also needs to be succesful of purchase this new progress with much less physique fat accumulation that may usually in any other case happen. The use of anabolic steroids is well noted for enhancing the metabolic fee. This is nothing distinctive to Deca Durabolin, and whereas it will not instantly burn body fats it will assist in the maintenance of a correct level. As low season mass gains require extra calories, consider the metabolic enhancement an added bonus.
While these could be related throughout specific categories of steroids, how they affect you as a person is entirely unpredictable – you will not understand how your body will react to a steroid till you employ it for the first time. This implies that using more than one steroid in a cycle (i.e., stacking) will not allow you to decide which steroid is causing which unwanted effects. This can hamper your performance and outcomes and, even more importantly, be downright dangerous when discussing unwanted effects like hypertension and cholesterol. Too high of a dosage can lead to muscle loss as a outcome of rising protein metabolism. Too low of a dosage can lead to fat acquire as a result of inadequate hormones. You may expertise gentle side effects at any dose, such as a higher body temperature and increased starvation (which might not be welcome whereas cutting). The muscular tissues may additionally feel slightly flat, significantly at greater doses.
Edema is a standard side effect because of testosterone rising aromatization. Throughout this course of, estrogen ranges rise, inflicting water retention in customers. This hormonal shift usually decreases muscle definition whereas increasing the risk of bloating and gynecomastia. Thus, controlling estrogen levels is necessary for delicate users to forestall the buildup of female breast tissue. Testosterone can even negatively have an effect on high-density lipoprotein (HDL) and low-density lipoprotein (LDL) ldl cholesterol ratios, potentially inflicting hypertension (2). Nonetheless, we observe such elevations in blood pressure to be delicate compared to more severe anabolic steroids.
First, I reached out to a veteran to indicate me the ropes about utilizing steroids for building muscle. Each sort of cycle is structured round particular steroids, dosages, and durations tailored to particular person objectives. For males, cycle complexity increases with expertise, from basic Testosterone-only cycles for novices to advanced choices like Trenbolone for the skilled. If you are new to steroids and unaware of any potential points, or if you know you undergo from estrogen sensitivity but nonetheless want to use compounds like those talked about above, an anti-estrogen compound is really helpful.
This could be very welcomed during hard diets, as a true hardcore bodybuilding cutting food plan is brutal on the human body. As an added bonus, Deca Durabolin will significantly preserve the individual’s lean muscle mass that may in any other case be lost during a needed caloric deficit. While this steroid will not provide hardening or conditioning results like many steroids, it could serve a objective is a few chopping plans. With the right dedication to your training and food regimen, achieving substantial measurement features in 20 kilos is more than potential inside mere weeks. Since a Dianabol cycle should run for no longer than six weeks, you can expect serious changes and outcomes within that brief period. Stacking Dianabol with other steroid compounds can help you increase your capacity for quick bulking and is an option for advanced customers who’re aware of the possible unwanted effects and know tips on how to combat them.
Steroid cycles are as a lot a science as they are a commitment to accountable use and self-awareness. Each phase—beginner, intermediate, and advanced—requires careful planning, thorough analysis, and an understanding of the risks involved. Advanced cycles result in peak muscle improvement, fast recovery, and extreme physique transformation. These cycles usually optimize performance, ensuring athletes are in prime situation for competitions or private milestones. It also helps users identify how their our bodies tolerate exterior testosterone supplementation. By avoiding a number of compounds, novices cut back the complexity and threat of unwanted unwanted facet effects, making it easier to deal with any points. Weight scales may not fluctuate a lot as a outcome of simultaneous fat-burning and mass-building results from Anavar.
Proviron has comparatively weak androgenic and estrogenic results compared with other steroids and might present some gentle anti-estrogenic advantages. As I stated, Dianabol is ideally used alongside different compounds, so your dosage can vary greatly depending in your objectives and what other steroids are within the cycle. To steadiness benefits and unwanted side effects nicely, 15 or 20mg day by day is not going to disappoint, particularly if it’s your first time. Dbol may be very effective in bulking cycles for gaining mass during quick intervals. You may also notice your ability to work out harder and longer increases as a end result of important enhance to nitrogen retention and blood flow that Dianabol supplies.
The DEA and other authorities intently monitor the importing and distribution of managed substances, including steroids. Girls have to be very cautious with the anabolic steroids they use, as we now have found many cause masculinization. For example, testosterone can enlarge a woman’s clitoris and reduce her breast size. However, when taking any form of tablet, it’s always recommended to take a break from them; thus, should you take legal steroids for 8 weeks, it’s advised to take 8 weeks off after this.
He might ask you for a number of tabs or for a small bottle of testosterone; he may say he’s operating quick and desires just a bit to finish out a cycle. As you wish to assist your friend you may give him what he needs; little do you know your «friend» is setting you up. By means of the steroid Management Acts, applying to all federal courts, easy possession of anabolics is a felony offence.
Keep In Mind, as with every powerful muscle building supplement, Testol one hundred forty works best way to get steroids (https://www.feldbahn-ffm.de/wp-content/pgs/fat_burning_steroids_for_women.html) when mixed with a stable coaching program and proper vitamin. It’s not a magic capsule, however somewhat a device to amplify your efforts in the gym. Used responsibly, Testol 140 might help you obtain the sort of transformation that used to be attainable solely with hardcore steroid cycles.
It is against the law to import anabolic steroids into the Usa without a valid prescription. It is also illegal to export anabolic steroids without a license from the Drug Enforcement Administration (DEA). The penalties for importing and exporting anabolic steroids rely upon the quantity of the drug and the jurisdiction. In basic, importing or exporting a small quantity of anabolic steroids for personal use is treated as a misdemeanor and is punishable by as much as one 12 months in jail and a nice of as much as $1,000.
Healthcare providers mainly prescribe anabolic steroids to treat low testosterone (male hypogonadism). However they use it for different circumstances as properly, such as to stimulate muscle development for folks with certain cancers or acquired immunodeficiency syndrome (AIDS). In the Usa, the legal standing of steroids is defined by the Controlled Substances Act (CSA), which is a federal law that classifies medicine primarily based on their potential for abuse and medicinal worth. In the United States, steroids are categorized as a Schedule III controlled substance underneath the Managed Substances Act (CSA). This signifies that it’s unlawful to make use of, possess, or distribute steroids without a valid prescription from a licensed healthcare provider. The possession, use, and distribution of steroids and not utilizing a prescription is a federal crime in the Usa, and can be punishable by up to one 12 months in jail and a fine of as a lot as $1,000 for a primary offense. Subsequent offenses can carry greater penalties, including as a lot as 5 years in jail and a nice of as much as $250,000.
Amino acids are molecules that our our bodies use to build protein and produce hormones. Protein is a vital macronutrient for growing and repairing body tissues. Here we’re going to dive a little deeper into the world of steroids (or ‘roids as they’re also known) and have a look at the advantages of taking legal alternatives.
Anybody even thinking about shopping for steroids must be well-knowledged in regards to the steroids they want to buy. If not, do not even hassle typing «the means to buy anabolic steroids in Australia» into the search bar. So, it’s important that you simply perceive UK steroid legal guidelines before taking any action to buy steroids on-line or elsewhere in the UK. Doing these things won’t make you bulk up overnight, however they may allow you to to construct muscle and get stronger over time.
Many performance enhancers truly believe if they do not signal for package legislation enforcement brokers have broken entrapment legal guidelines. In some cases, the individual will even ask the deliverer of the package if he is a regulation enforcement agent, of course he will say no and the individual will settle for the bundle; this is not entrapment. Law enforcement agents by the wording of the regulation are permitted to lie and cheat if it results in an arrest; this pertains to steroid laws as properly.
Nonetheless, there are some doctors who are prescribing these medicine for medical causes beneath close supervision. As a head start, we’ll let you know our top decide for a dependable source of real pharmaceutical-grade steroids — AUgear.retailer. This online steroid store offers a range of steroids on the market, with delivery obtainable in Australia and worldwide. Suppliers who’re concerned about your happiness and well-being need you to make use of their merchandise safely. Examine if these services can be accessed via WhatsApp or a help ticket.
Testosterone is necessary for selling and sustaining muscle development and developing secondary male intercourse traits, corresponding to a deep voice and facial hair. Cortisol is a steroid hormone that your adrenal glands (the glands on high of your kidneys) make. Cortisol affects several features of your health and helps regulate your body’s response to stress. In abstract, steroid injections are a valuable tool in treating autoimmune situations by lowering inflammation and modulating the immune system’s activity. They can provide vital aid and improve patients’ ability to participate of their daily actions.
Steroids may also be applied directly to the pores and skin within the form of lotions, ointments, or lotions. This methodology is particularly effective for treating skin rashes and inflammatory skin conditions like psoriasis or eczema. Topical purposes typically have milder side effects in comparability with oral steroids as a end result of they do not enter the bloodstream to the same extent. They are anti-inflammatory medicines that can be utilized to treat a range of circumstances, similar to joint pain, arthritis, sciatica, inflammatory bowel disease, allergies, bronchial asthma, and autoimmune illnesses corresponding to a number of sclerosis.
A methyl group hooked up to C-1 can also confer oral exercise, as in methenolone or mesterolone, however these two anabolic steroids are thought of to be comparatively weak in pharmacological exercise. In goal tissues the place intracellular enzymes are current, the action of testosterone is mediated by metabolism. Testosterone is irreversibly converted by the enzyme 5α-reductase to 5α-dihydrotestosterone (DHT), which binds with greater affinity to the androgen receptor (AR), or by aromatase to oestradiol, which binds to the oestrogen receptor (ER). Testosterone and DHT can be additionally converted to weaker androgens (not displayed), once more being depending on whether the target tissue has the required enzyme exercise, e.g., 3α-hydroxysteroid dehydrogenase, 17β-hydroxysteroid dehydrogenase. Further relative contraindications include peptic ulcer illness, congestive heart failure, and viral or bacterial infections not managed by anti-infectives. Jaundice turns the pores and skin and eyes yellow and means there could additionally be liver harm. These drugs also can cause harmful liver cysts, needing medical care.
In other tissues, corresponding to adipose tissue and parts of the mind, testosterone is converted by aromatase to the oestrogen, oestradiol. In bone, the mechanism of motion of the anabolism of androgens has not been completely elucidated but both a direct impact of testosterone and a mediated effect by aromatization to oestradiol are essential (Orwoll, 1996; Zitzmann and Nieschlag, 2004). In the human skeletal muscle (collected less than 12 h post-mortem), 5α-reductase activity (either kind 1 or 2) just isn’t detectable (Thigpen et al., 1993), so testosterone itself is chiefly binding to the androgen receptor (as supported also by a number of animal studies, mainly within the rat).
In small doses narcotics have medical makes use of that include relieving extreme pain and inducing sleep. Nevertheless, narcotic overdose is a medical emergency and can result in respiratory despair and even dying. It has for example been shown that E2 phosphorylates Akt (protein kinase B) inside an hour in the ventromedial nucleus of the hypothalamus in wild kind mice. This therefore suggests the existence of fast intracellular non-classical responses to E2. Physiological effects of compounds from ovarian origin, to be later called estrogens, were identified by Allen and Doisy at about the identical time in 1923 (Allen and Doisy, 1923). Estrone was independently isolated and purified by Allen and Doisy and by Butenandt in 1929 and estriol followed in 1930 (Parl, 2000). The most potent and best-studied estrogen, estradiol-17β was the final to be identified in 1933 (Lauritzen and Studd, 2005).
Doctors sometimes prescribe them to treat hormonal situations similar to hypogonadism. Athletes usually devour steroids on a trial-and-error foundation, using info gained from different athletes, coaches, websites or fitness center «gurus.» As a end result, they do not have entry to medical info and assist that may keep them protected while utilizing these medication. Testosterone and a variety of other of its esters, as nicely as methyltestosterone, nandrolone decanoate, and oxandrolone, are the primary anabolic-androgenic steroids at present prescribed in the us
Always prioritize well being and well-being, and by no means hesitate to hunt professional recommendation. Nasal steroid sprays will often convey reduction for signs associated to allergies and chronic sinusitis. Using a steroid nasal spray the mistaken way could cause unwanted effects, so always comply with product directions. Be sure to tell your healthcare provider about all conditions you have and drugs you take, so they can ensure one of these drugs is safe for you. These membrane-initiated behavioral results of estrogens clearly interact with the genomic actions of those steroids no less than in rodents (Vasudevan and Pfaff, 2008) and quail (Seredynski et al., 2013). The mechanisms mediating these interactions have been partly elucidated (Kow and Pfaff, 2004; Vasudevan et al., 2001) however many questions clearly remain.
AAS use is very popular and 1–3% of US inhabitants have been estimated to be AAS users. Nevertheless, AASs have unwanted aspect effects, involving all organs, tissues and physique features, particularly long-term toxicity involving the cardiovascular system and the reproductive system, thereby, their abuse is taken into account a public health issue. The aim of the proposed evaluation is to spotlight the newest evidence regarding the mechanisms of action of AASs and their unwanted effects on organs and way of life, as nicely as suggesting that AAS misuse and abuse lead to adverse results in all body tissues and organs. Oxidative stress, apoptosis, and protein synthesis alteration are common mechanisms concerned in AAS-related damage in the entire physique. The cardiovascular system and the reproductive system are the most regularly involved apparatuses. Epidemiology as well as the molecular and pathological mechanisms concerned within the neuropsychiatric side-effects of AAS abuse are nonetheless unclear, further analysis is needed on this subject. In addition, diagnostically dependable checks for AAS abuse ought to be standardized.
Even although they can still be prescribed by a medical doctor in the united states, the usage of anabolic steroids for injury restoration functions has been a taboo subject, even amongst the overwhelming majority of sports activities medication docs and endocrinologists. Oral activity can be conferred by substitution of the 17α-H on the steroid nucleus with a methyl or ethyl group to make the 17α-alkylated anabolic steroids. Alkyl substitution prevents deactivation of the steroid by first-pass metabolism by sterically hindering oxidation of the 17β-hydroxyl group.
Very younger and elderly individuals are extra vulnerable to develop steroid unwanted effects. Not solely that, but I additionally provide you with my high suggestions of what you can do to really feel better while you’re on prednisone. So in case you have been questioning, «https://shop.zdravnitza.com/themes/pages/?winstrol_and_weight_loss.html are the unwanted facet effects of this steroid, prednisone? If you are being chased by a tiger, that’s superior that your body just launched an entire bunch of sugar in order that your muscular tissues have the power to run away. But not if you’re simply combating an autoimmune condition, or you just need to have the ability to open a bottle with your hands troubled with rheumatoid arthritis, or some other nice reason to take prednisone. But after we are taking prednisone, it is taking all of these emergency struggle or flight, loopy emotions, and making them long-term.
The natural plant extract 20-Hydroxyecdysterone(5) used within the formulation has been clinically confirmed to stimulate muscle development and power. A subreddit designed for dialogue of supplements and nutraceuticals; for health, efficiency, or any intended (or not intended) purpose. If someone has a possible bleeding drawback or is taking anticoagulants (often known as blood thinners), steroid injections may trigger bleeding on the website.
A research evaluating methotrexate and azathioprine in patients with myasthenia gravis demonstrated that both medication had an identical diploma of steroid-sparing effects. Azathioprine is one other DMARD that may reduce steroid doses in sufferers with inflammatory bowel disease. Methotrexate belongs to a class of medicine known as DMARDs, or disease-modifying antirheumatic medicine. It is frequent to make use of DMARDs like methotrexate to scale back prednisone doses and permit for earlier discontinuation of prednisone.
Natural treatments are not a alternative for prednisone, however they could work alongside prednisone to assist battle inflammation. Other anti-inflammatory supplements similar to omega-3 fatty acids, zinc, and turmeric (curcumin) struggle inflammation that is already current. They present the building blocks of pure molecules our physique needs to resolve irritation. Corticosteroid medicines embrace cortisone, hydrocortisone and prednisone. They are useful in treating rashes, inflammatory bowel illness, asthma and other circumstances. There are not any finest steroids for weight loss, as all AAS will trigger weight gain. Dosages can improve as much as 500 mg/day, with cycles extending to 12 weeks based mostly on a user’s level of experience.
You have to work sensible in order that every minute you spend building muscle can rely toward vital positive aspects. It maximizes physique natural ranges of testosterone for the rationale of gaining maximum muscle mass gain and recovery. Our patients usually make the most of these before a competition to help them burn fat mass. They do not have any vital anabolic effects; therefore, users won’t achieve any notable muscle mass.
This is a great all-purpose steroid that might be taken orally or injected. Trenbolone is taken by way of injection and is steroids illegal (http://mceditrice.it/images/pgs/acquistare_trenbolone_1.html) acknowledged as one of the highly effective of all steroids on the market. In fact testosterone by itself is great for slicing; whether you use cypionate, enanthate or propionate; all different sorts of testosterone.
Read on to learn about what natural steroid supplements are and customary examples. This article additionally covers potential security issues and the advantages and risks of these substances. Natural steroid supplements are compounds that act equally to the steroids that the human physique naturally produces, such as the hormone testosterone. This is not optimum for slicing cycles; hence, why testosterone is predominantly used as an low season bulking steroid. If customers need to run testosterone during a slicing cycle however with minimal water weight, an anti-estrogen such as anastrozole or letrozole can be taken.
We have found trenbolone to be essentially the most highly effective anabolic steroid on the market, famous for its fast results (with acetate) and distinctive capability to remodel body composition. Trenbolone is a very potent injectable steroid, with enanthate and acetate being the two frequent esters used by bodybuilders. Testosterone causes aromatization; thus, high levels of testosterone are converted into estrogen. This can lead to water retention, causing a bloated or clean look to the muscle tissue. In contrast, injectable steroids aren’t considered hepatotoxic, having a more direct passage into the bloodstream (via intramuscular injection) and thus bypassing the liver. We understand that women and men who aspire to compete in bodybuilding professionally may have restricted options, as genetics, coaching, and food regimen can solely construct limited amounts of muscle.
Stacking can significantly improve outcomes, especially for particular targets like bulking or slicing. CrazyBulk presents steroid alternatives which are protected, authorized, and efficient. Moreover, the company’s merchandise promise quick outcomes with out anabolic steroid side effects. This agrees with the experience of bodybuilders who usually use it submit cycle to assist enhance lean muscle and enhance energy levels. For instance, if you have painful arthritis in a toe, you will receive an area steroid injection immediately into that toe. When potential, doctors select local steroids over systemic steroids to reduce the unwanted aspect effects of treatment. D-Bal Max is considered one of the best authorized steroids that work like Dianabol without the dangers and illegalities concerned.
All The Time search the recommendation of your doctor or different qualified health supplier with any questions you might have regarding a medical situation. If you think you may have a medical emergency, immediately name your doctor or dial 911. Prednisone is a member of the group of medicines called corticosteroids, also recognized as glucocorticoids. Other corticosteroids can be found that also treat inflammatory illnesses.
Consequently, stacking it with oral steroids for Endurance athletes (https://bewellprimarycare.com/wp-content/pgs/buy_anavar_8.html) can pose cardiac issues. Equipoise may be described as a barely stronger model of Deca Durabolin and less expensive. It is extra androgenic than Deca, leading to average lean muscle features and some fats loss. Trenbolone is basically an injectable steroid used by bodybuilders to realize large amounts of lean muscle and energy while enhancing fat loss (1). The downside to this cycle is that it contains two of essentially the most poisonous oral steroids obtainable.
Consistently monitoring progress and adjusting dosages and cycles accordingly will help in constructing lean muscle mass while keeping side effects under management. IGF-1 is naturally increased each time you exercise with out using steroids, however Deca supercharges this course of beyond what the body is capable of alone. IGF-1 is a growth hormone, so it is responsible for the muscle’s development at its most elementary. It’s a vital hormone for growing lean mass, enhancing protein synthesis, burning fat, and repairing and recovering muscle tissue.
By avoiding a number of compounds, novices cut back the complexity and danger of unwanted unwanted effects, making it easier to deal with any issues. Check and tren cycle is a mix of Trenbolone and testosterone that creates a severely intense anabolic state. The cycle continues between eight to 12 weeks based on the level of experience of the consumer together with the specified outcome. While Trenbolone is going to blow your dimension by way of the roof and cut you down in a really brief time period, Trenbolone does have unwanted facet effects.
A testosterone-only cycle is frequent amongst newbies, whereas a testosterone and Anadrol cycle is extra regularly utilized by elite bodybuilders who’re more accustomed to tolerating such poisonous compounds. In our expertise, users who proceed lifting weights after their testosterone cycle retain the vast majority of their muscle and power results. However, if a person trains much less incessantly or turns into sedentary, vital muscle atrophy can occur. This stack will produce even harsher side effects than the Anadrol and testosterone cycle, albeit with enhanced muscle gains. Anavar is generally considered as a slicing steroid because of its highly effective fat-burning results.
I’ll also present you how to stack and cycle steroids correctly to maximise results and reduce risks. The androgenic results of testosterone are what offer you a deep voice, facial and physique hair, and all of the issues that differentiate you as a person from a lady. How you handle estrogenic unwanted effects also can have a further impact on cholesterol.
As Quickly As you’ve really reached the stage of superior data and advanced expertise with steroids, it is possible for you to to move to the very best and most superior stage of anabolic steroid use. It can (and should) take years to get to the purpose the place you could be considered a sophisticated person, and this is a gradual course of quite than one thing you abruptly obtain overnight. Your aim ought to be to acquire gradual and steady development through your experiences with each steroid cycle. Now you’re able to get into the beginner’s 500mg weekly testosterone-only cycle. Enanthate or Cypionate are the most effective testosterone esters in this cycle, so you’ll want two 10ml bottles of both.
Nevertheless, it has an extended detection time, as a lot as 18 months after your final dose. Each types of Nandrolone hormone are the identical as these two steroids, but they have a different ester hooked up. NPP has a short ester that releases quickly and offers quick outcomes however has to be injected much more frequently than Nandrolone Decanoate, which has a long-lasting ester. It not only helps to alleviate and prevent joint pain but assists with the healing of tendons and ligaments as properly. Deca-durabolin is one compound that works wonderful with as little as 200mg; for therapeutic functions, even 100mg does the trick.
Dbol can even improve levels of estrogen because it can aromatize, which brings some potential side effects like gynecomastia (increased breast tissue) and fluid retention. You will also must be careful for androgenic side effects and consider taking aromatase inhibitor drugs alongside it to reduce estrogen and decrease these side effects. When one begins for the first time or is a lady, a secure bulking cycle entails steroids on the milder aspect and with fewer dosages. One such really helpful protected cycle is to go for 6 to 8 weeks using Crazybulk Anavar and Winstrol, which would yield minimal unwanted effects and promote lean muscle gains. Bulking steroids help to enhance exaggerated muscle development and bulk muscle mass. They do that by promoting protein synthesis, rising nitrogen retention, and additional significantly boosting testosterone levels within the physique for optimum situations for intense muscle acquire and energy.
This stack is not suitable for novices and may solely be taken as soon as you’re comfy with the consequences of a trenbolone-only cycle. Testosterone, like different anabolic steroids, has a transient effect on testosterone ranges. Confident and advanced anabolic steroid users may have expertise with no less than a number of different types of steroids along with testosterone. This opens the door to extra powerful cycles that present probably the most excessive attainable outcomes, whether in bulking or chopping and body recomposition. Outcomes from a Check Prop cycle shall be shaped by what you’re aiming for – this steroid will assist you to retain muscle if you’re weight-reduction plan for contest prep or other chopping targets. For beginners, starting with a decrease dosage of trenbolone is generally recommended to evaluate their tolerance and response to the compound.
Stacking these three fats burning steroids will get you the place you need to be quicker. Beginners desirous to cycle testosterone might run dosages anyplace up to 350 mg for 7 weeks. Deca Durabolin is typically utilized in bulking cycles due to its anabolic effects and lack of androgenicity. 5a-reductase inhibitors can scale back the dimensions of the prostate by 20–30% (2); nonetheless, decreased fat loss and muscle building can also happen, with DHT being a highly anabolic hormone. Testosterone’s androgenic results are caused by the 5α-reductase enzyme (converting testosterone into DHT), meaning that customers can experience more hair loss, thinning, or recession on the scalp. The most popular forms of testosterone used by our sufferers are cypionate and enanthate, because of their longer ester construction and ease of injections (causing minimal discomfort or pain).
To achieve muscle mass and construct an attractive athletic body, you have to keep a stability between coaching, sleep, and correct vitamin. It is essential to decide on the right cycle of anabolic steroids and then carry out post-steroid therapy. It’s a common question asked, particularly on steroid message boards, and it’s a broad query that holds many extra. It’s not sufficient to ask where are steroids authorized, as legality can vary on a few key points.
Expertise the very same herculean stamina and extraordinary efficiency with Winidrol, its completely lawful choice. You will definitely be stronger, faster and likewise much more highly effective than ever before. You will certainly be left with an superior, chiselled body just ripe for opponents or for striking the beach. While an illegal anabolic steroid accommodates synthetic testosterone derivatives, the best legal steroids depend on pure plant-based components to boost muscle tissue and power huge positive aspects at the fitness center. Legal steroids are a safe, natural approach to construct lean muscle without the serious side effects of unlawful anabolic steroids. If you’re seeking to buy injectable steroids online, we advocate our on-line USA retailer to satisfy your steroid requirements. However, before you purchase your merchandise online, read our Pros and Cons part to make certain that they’re the https://politecnicotafalla.educacion.navarra.es/web/pgs/?comprar_dianabol_2.html type of purchase testosterone cypionate for you.
Attaining your health objectives with anabolic steroids is totally potential when carried out responsibly and with guidance from a trusted source. Bio Genetics USA stands as your associate in this empowering journey, committed to offering you with one of the best merchandise and support obtainable. The Place can I buy steroids legally, if we advised you wherever you need we’d be giving you the most effective news of your life, and in some ways wherever you want is type of true. In most any country, you can legally buy anabolic steroids so so long as you achieve this from the pharmacy through a prescription given to you to deal with a medical want.
HGH is a protein hormone that’s naturally secreted by the pituitary gland. Bodybuilders usually take HGH in exogenous kind to increase HGH production, rising muscle mass and fats loss. PharmaHub is your trusted supply to purchase anabolic steroids within the USA and Europe with your Credit Card.Safe and quick on-line funds. 100% actual gear and real reviews.Quick supply in 3-10 days in common within the USA and 5-15 days in Europe and worldwide, free tracking number to comply with your order. You should purchase Anavar for sixty four USD and they additionally offer many types of supply with a decrease price, Anavar is an anabolic steroid that bodybuilders use when running a bulking program. The injectable steroid from the Moldovan firm PharmaCom labs helps to increase muscle mass because of further protein synthesis and increase the user’s endurance. Also, the steroid is in a position to stimulate urge for food and have an anti-catabolic impact (protecting proteins from destruction).
Earn loyalty points with every buy and redeem them to assert reductions, free CrazyBulk merchandise, unique merch and different rewards. Anavar is sold each as a pharmaceutical grade product and an underground lab variation. Anavar offered in pharmacies follows stricter high quality control as compared to its underground counterparts, which possess various levels of purity and price. Be cautious in case you are going for Anavar bought in underground circles, as its requirements aren’t controlled. This guide will assist you to perceive the worth of Anavar, where yow will discover Anavar for sale online, and what issues ought to be taken into consideration previous to the purchase. ‘HGH gut’ is often observed in IFBB bodybuilders, which could be attributed to the enlargement of inner organs such because the intestines and liver (9). Although Clenbuterol is utilized by many bodybuilders to nice effect when attempting to lean out and get ripped, it’s not FDA-approved for humans.
If you’re also confused among so many choices and want some assist, you may be in the right place. Transform your body in as little as 30 days with highly potent, hardcore anabolics and bodybuilding dietary supplements for bulking, slicing, energy and efficiency. Many European nations carry such legal guidelines, and the United Kingdom is the prime example. You cannot purchase anabolic steroids on the black market and also you most certainly cannot promote them; nonetheless, you’ll find a way to walk right into a pharmacy and buy them as you would a bottle of cough syrup.
They also usually have a very excessive overhead, almost about manufacturing of their steroids. The price for that bottle of testosterone you get that says «STERIS» on it doesn´t just reflect the manufacturing prices, but also many other prices that you simply imagine a big company would have. Advertising, research and development, delivery costs, scientific trials, and employee salaries all factor into the value of a bottle of testosterone produced by a large firm. Then that bottle goes to pass by way of numerous palms (a regional distributor, a pharmacy, etc…) till it lastly ends up in the hands of the individual who sells it to you.
You can buy any high-quality of anabolic steroids or other dietary supplements with detailed info; there isn’t a fuzz or faux products. Unique and high-quality merchandise will help you to achieve your desired targets when it comes to bodybuilding. It is important to get detailed info and proper information concerning the anabolic steroids which you would possibly be utilizing. Anabolic steroids, also known as anabolic-androgenic steroids (AAS), are artificial substances designed to imitate the consequences of testosterone.
Subsequently, it is usually prevented by steroid users who decide to go for lighter steroids, which can still yield impressive results (such as testosterone or Dianabol). Sustanon 250 is an effective testosterone ester utilized in bulking cycles to add vital quantities of muscle and strength. Some consider Sustanon 250 to be one of the best type of testosterone due to it containing both brief and lengthy esters. Typically, we see Sutanon 250 produce exceptional results in the early and latter stages of a cycle. D-Bal is the legal steroid based on maybe the most well-liked anabolic steroid of all time, Dianabol. There is a large demand for anabolic steroids proper now; however, not everybody wants to break the legislation or endure the serious well being consequences that include taking steroids.
Since reaching noticeable muscle gain and fats loss results typically takes 8–12 weeks or longer, buying a two- or three-month supply upfront can prevent a major sum of money. Reputable corporations providing legal steroids for muscle acquire usually present a money-back assure. This not solely protects your investment but also exhibits the corporate’s confidence in the product’s effectiveness. A refund policy is a strong indicator of high quality and customer satisfaction. At All Times look for natural steroid options produced from natural extracts, amino acids, nutritional vitamins, and minerals.
When using this steroid to gain profit from its therapeutic effects only, males can dose at 100mg to 200mg weekly and see substantial advantages, together with significantly improved recovery and joint reduction. Novices may overlook the necessity of post-cycle therapy after a steroid cycle, however post-cycle remedy is simply as essential because the cycle itself. Using steroids will all be for nothing if you don’t get your food plan and coaching right25. Again, this extremely is dependent upon your objectives and why you’re doing a cycle. Bulking and slicing may have two very completely different diets and workout strategies.
Oxymetholone is used medically to treat osteoporosis, anemia, and wasting syndrome. It can be used as an AA steroid by bodybuilders for its capability to boost muscle development and power by increasing testosterone levels. Anadrol also improves recovery and stamina by decreasing or delaying fatigue as a result of increased pink blood cell manufacturing, which provides more oxygen to the muscles. Its use as a remedy for anemia is a testomony to its capability to enhance pink blood cell rely.
Dianabol also will increase estrogen ranges via aromatase, whereas Anadrol does not aromatize but instantly stimulates estrogen at a receptor stage. Trenbolone is extraordinarily androgenic, with a rating of 500, roughly 10 instances that of Dianabol. Dr. John Ziegler was entrusted with creating a steroid that was stronger than testosterone to be able to help the US Olympic group in defeating the Soviets in the 1950s. Letrozole is an efficient AI that reduces the conversion of testosterone into estrogen (4), which is efficient for combating high progesterone. We have discovered SERMs to be ineffective in decreasing progesterone-induced gynecomastia from Deca Durabolin.
Facet results to anticipate with this steroid include testosterone suppression, delicate unfavorable influence on ldl cholesterol, and relatively low risk of androgenic results in males like hair loss and acne. Equipoise has a low degree of estrogenic activity, so these side effects ought to be simple to manage. Still, they can include water retention and gynecomastia, particularly when the steroid is used at larger doses. Girls can use Equipoise at low doses with a low threat of virilization effects. If you’re going to run an EQ cycle, try my full Equipoise (Boldenone) cycle guide.
Seeing friends obtain huge transformations — sometimes enhanced by unlawful substances such as anabolic steroids or development hormones — may be disheartening. It often creates pressure to hunt these sooner options, even if they come with dangerous unwanted facet effects like liver injury, coronary heart problems, or hormonal imbalances. Most intermediate users might be assured in utilizing another anabolic https://awards.breakbeat.co.uk/sphinx/inc/?anavar_in_australia_where_can_i_buy_oxandrolone_1.html, and in this case, we are able to embrace the highly effective Dianabol to the cycle alongside Equipoise and testosterone. Dianabol serves an essential objective in this cycle by kicking off positive aspects for the primary 4 weeks.
He noticed that most weight gaining merchandise to extend muscle have been made with elements that had been harmful or of poor high quality. He knew there was a safer and healthier means to do this, so he created a particular blend of herbs, amino acids, and nutrients to help bodybuilders slim down and achieve muscle. If you want to lift more, run farther, leap larger and generally play tougher all around then, you need the CrazyMass Strength stack. This steroid bundle provides you mass gains while dashing recovery times, targets your protein synthesis levels and helps your entire physique fight fatigue – which means you can perform for longer.
Nevertheless, Anadrol should not be taken with some other hepatotoxic compounds to stop further liver injury. Anadrol, like Superdrol, will have a deleterious impact on the guts, inflicting cardiac hypertrophy and notably greater blood strain. They supply a authorized path with much less threat, fewer problems, and the comfort of over-the-counter availability. SARMs are usually obtainable for around $50 — $100 per 30 days, whereas Prohormones can value anyplace from $100 to $200 per month. The cost of Prohormones can also differ significantly depending on the particular product, as some are more expensive than others. It’s important to research every product rigorously earlier than using it, and to use it safely and responsibly. SARMs are usually taken orally in pill type, however may additionally be taken in liquid form or topically.
These atypical antipsychotics are characterised by a mixed exercise on both the D2 and 5-HT2a receptors. Apart From their antagonistic results on these receptors, they possess various pharmacologic interactions with numerous neurotransmitter receptors (44). The weight achieve by sulfonylurea is most pronounced within the first months of remedy and then reaches a plateau. In the UKPDS and ADOPT studies a imply weight achieve of this therapeutic class is approximately 4 kg through the first yr of remedy (7,8).
Fluid retention can result in a cascade of adverse results in your health. And even better, there are steps you can take to help reduce effects. While maintaining a reasonable weight can be difficult, being underweight can potentially cause hurt.
The influence of GC‐induced weight gain has obtained comparatively little consideration, despite research reporting its importance to sufferers 11, 46. For example, over 40% of sufferers with RA thought-about weight achieve as «most bothersome in everyday life and ascribed to glucocorticoids» in comparability with other listed opposed effects forty six. According to UCSF Health, prednisone weight acquire is usually because of an increase in urge for food — and subsequently a rise in calorie intake — and fluid retention. Additionally, different unwanted effects of the drug, including extreme fatigue and muscle weakness, might make it more difficult for you to exercise and burn off extra energy. These chemicals — typically hormones — are used by your organs, tissues and cells to carry out their functions. This potent drug is given to individuals whose our bodies cannot make enough steroids and is also used to treat illnesses like lupus, a quantity of sclerosis, most cancers and severe allergic reactions.
They can disrupt the body’s pure hormone steadiness, leading to a variety of issues together with acne, hair loss, and temper swings. Moreover, utilizing steroids with no prescription or medical supervision can lead to habit, cardiovascular issues, and even organ failure. They will usually not prescribe prednisone or different corticosteroids for long-term use, because the medicine can have extreme antagonistic effects. When an individual stops taking prednisone or other steroids abruptly, they could notice signs including lethargy, low appetite, weight loss, and a general feeling of being unwell. Prednisone breaks down bones, leading to bone loss and possibly osteoporosis. Prednisone also breaks down muscle tissue, each of which lead to skinnier legs and arms regardless of a rounding belly and face. Bone mass and muscle mass contribute to the body’s overall lean body mass.
However, long-term use of anabolic steroids can cause many antagonistic results. Although, steroids are extremely effective in anti-inflammation, in addition they have some agitating and worth-worrying unwanted side effects concerning weight considerations. This query has gained immense stardom due to the rising use of steroids. Not Like a every day dose, the weekly remedy didn’t appear to cause the standard unwanted aspect effects of corticosteroid treatment, corresponding to weight gain, excessive blood sugar, and high blood pressure. If we ignore unwanted effects fully, trenbolone is maybe the best steroid for fats loss (subcutaneous) and superior to all different anabolic steroids on the market. If we were rating one of the best steroids for women (https://pawndetroit.com/wp-content/pages/?hit_training_food_and_dbol_you_can_make_major_savings_on_your_budget.html) steroids for weight loss (or fat loss), Winstrol would likely take the highest spot.
Supporting progesterone naturally—through adequate sleep, healthy fats, stress administration, and generally bioidentical hormone therapy—can restore hormonal harmony and help assist a healthier weight. When progesterone ranges are low, significantly in estrogen-dominant states, women could experience bloating, fluid retention, and mood swings. The resulting fatigue and irritability could make wholesome habits feel like a monumental task. Progesterone additionally influences insulin sensitivity, and low levels could impair your body’s capacity to manage blood sugar. The challenge with thyroid-related weight achieve is that it’s not purely a matter of power balance. Even when you eat well and train, your sluggish metabolism may not burn calories as effectively.
In these instances, weight reduction may not be a direct result of prednisone, but quite a consequence of managing the underlying condition. There are some ways to scale back cortisol within the body, including treatment modifications. The purpose for high cortisol levels discovered on check results will must be diagnosed. These next steps may include imaging studies to gauge for an endocrine tumor or different trigger. This excess glucose is then typically transformed into fats, which gets saved in your body. With cortisol, it’s saved as belly fats (sometimes referred to as central adiposity). If you’re looking for extra rapid help together with your weight while on prednisone, you would consider using a better dose of berberine if that’s safe for you and your condition.
«GLP-1s have the best likelihood of serving to people achieve and maintain lasting weight reduction when they are paired with strong diet steerage and lifestyle assist,» stated Callahan. Facet effects were widespread and had been largely delicate abdomen issues like nausea or diarrhea, however few individuals stopped taking the medication due to them, he stated – solely about 6% on tirzepatide and 8% on semaglutide. Usually supplied by on-line pharmacies, compounded semaglutide merchandise are available in numerous containers and packaging, together with multiple-dose vials and prefilled syringes, the agency famous. The authors wish to acknowledge gratefully all the members on this study and the contribution of Ying Chen, Xiaochen Yan and Lili Li in Well Being Management Center of Tianjin Union Medical Heart. Hold studying to be taught in regards to the mild and critical unwanted facet effects prednisolone could cause. To learn extra about this medicine, including its makes use of, dosage, and value, see this prednisolone overview. Clenbuterol is a sympathomimetic amine that stimulates thermogenesis, thus dramatically raising a person’s metabolism.
If you’re menstruating, syncing your exercises with your cycle also can make a distinction. Throughout the follicular phase (after your period and before ovulation), your estrogen ranges are rising, and energy is typically high—this can be a great time for extra intense workouts. In the luteal phase (after ovulation), progesterone rises and power may wane—gentler motion may feel better. Learning to cycle with your hormones instead of forcing your physique into one routine can make train extra gratifying and sustainable.
That’s as a result of taking steroids could cause your physique to retain fluid, somewhat than flush it out of your system. But whereas they go about their enterprise, steroids can cause trouble for some folks. For example, long-term corticosteroid use may cause thin skin and increase the danger of easy bruising. This is often a optimistic step for RA administration if an individual is obese or overweight. It may help to enhance general health or other existing situations. Some athletes may seem to get an edge from performance-enhancing medicine.
livewin1688 Steampunk – วงล้อแห่งโชคชะตา
ธีมสไตล์จักรกลย้อนยุค ที่ไม่ใช่สล็อตธรรมดา แต่เป็นการหมุนวงล้อแห่งโชคชะตา ที่สามารถปลดล็อกโบนัสแบบหลายชั้นได้
Halloween Fortune – ปาร์ตี้แม่มดสุดหลอน
เกมธีมฮาโลวีนที่ผสมความหลอนและความมันส์เข้าไว้ด้วยกัน มีฟีเจอร์ Wild พร้อมตัวคูณสูงสุด และฟรีสปินแบบสุ่มสุดเซอร์ไพรส์
Steroids have turn out to be a preferred tool among athletes and bodybuilders seeking to improve their power and endurance. By utilizing specific steroid compounds, people can experience significant improvements in power output and strength positive aspects. Moreover, certain forms of steroids are identified to offer endurance advantages, allowing athletes to push themselves further throughout training sessions or competitions. Overall, understanding the different types of anabolic steroids allows bodybuilders to make informed decisions about which choice greatest aligns with their goals whereas considering potential risks involved. You are likely familiar with the usage of a particular sort of steroid hormones (anabolic) by bodybuilders to increase muscle mass. Many guys discover a regarding drop in their sex drive after stopping steroids.
It takes 7-14 days for the steroid in a preventer inhaler to construct up its effect. This means it doesn’t give instant relief of symptoms (like a reliever does). After a week or so of treatment with a preventer, the symptoms have often gone or are a lot decreased.
The use of anabolic steroids can result in many temporary and everlasting health issues. In reality, the game of bodybuilding is dealing with a host of deaths allegedly due to drug use. In the low season, the major focus is on building muscle mass and rising total dimension. Bodybuilders usually restrict their gear use to one to 2 compounds during this time, certainly one of which is generally testosterone. Testosterone is essential for selling and maintaining muscle growth and growing secondary male sex traits, corresponding to a deepening voice and facial hair. Topical steroid is usually combined with one other energetic ingredient, including antibacterial, antifungal agent or calcipotriol.
This sexual dysfunction may be due to lack of estrogen effect on the brain. In normal males, testosterone is aromatized to estradiol, and estradiol effects on the mind are important for regular libido and general sexual operate. At the start of a cycle, the individual begins with low doses of the anabolic steroid being stacked after which slowly will increase the doses. In the second half of the cycle, the doses are slowly decreased to zero. This is sometimes adopted by a second cycle during which the particular person continues to coach however with out anabolic define — https://behaviortherapyassociates.com/wp-content/pages/?buy_testosterone_10.html, steroid.
Optionally, take 10mg every day of Nolvadex to fight gyno from Dianabol. Observe the «1 Vial Cycle» above for the injecting technique for testosterone. Whichever means you go, you need to make certain all of the steroids are cleared out of your system earlier than starting PCT. This is where figuring out your steroid half-lives and clearance occasions is crucial. So put aside that urge to use Winstrol, Deca, Tren, or the rest on the first cycle and save them for future cycles, including just one by one to see the way you reply to each!
Topical steroid could additionally be falsely blamed for a sign when underlying illness or another situation is responsible (for instance, postinflammatory hypopigmentation or undertreated atopic eczema). There is little level in diluting a topical steroid, as their efficiency does not rely much on concentration and diluting the product doesn’t cut back the chance of opposed results. After the primary 2 or three functions, there is not any further benefit from making use of a topical steroid more than once day by day. They’re notorious for their muscle-bulking energy and notorious for the health dangers they pose.
I even have competed a quantity of occasions, even winning a junior title in traditional physique. I have a bachelor’s in felony justice and business obtained via Alvernia University. Once I am not focused on work or training, I enjoy watching movies or reading about something and every little thing. Total, steroids are substances that help in the bodybuilding course of, however definitely have their downsides. The emergency and referral resources listed above are available to people located within the United States and usually are not operated by the National Institute on Drug Abuse (NIDA). NIDA is a biomedical analysis group and does not provide personalised medical recommendation, therapy, counseling, or legal session. Data offered by NIDA isn’t a substitute for skilled medical care or authorized consultation.
A main promoting point for these pure alternatives is their security profiles. Not Like artificial anabolic steroids – which carry risks like liver harm (indicated by raised ALT levels), lipid profile adjustments, and long-term health points – these plant-derived substances seem much safer. In one examine monitoring sufferers utilizing ecdysterone supplements for 10 weeks, members experienced important increases in muscle mass and power in comparability with those on a placebo. Whereas this doesn’t essentially mean it’s as potent as artificial steroids, it does counsel these options can aid in muscle progress. The perception is that different anabolic steroids interact to produce an effect on muscle measurement that’s higher than the results of each drug individually, a concept that has not been tested scientifically seventy one. The ratio of anabolic to androgenic properties plays a big position in enhancing performance. Anabolic steroids with higher anabolic ratios promote increased muscle growth, while compounds with greater androgenic ratios enhance energy and energy.
Additional conversions and catabolism occurs in the liver, in other «peripheral» tissues, and in the target tissues. Individuals who use anabolic steroids typically expertise an increase in muscle energy in a short time sixty three, sixty four. This generally implies that individuals are able to prepare extra typically and for longer intervals of time, with improved restoration. Fluid retention can be common and may lead to muscular tissues trying soft or bloated.
Customer service is highly responsive and skilled, guaranteeing that inquiries and issues are addressed promptly and successfully. In terms of pricing, Osgear strikes a stability between affordability and value, making it a fantastic choice for buyers on the lookout for aggressive charges with out compromising on high quality. I had used the smaller peptide/rc sites for mt2 and similar merchandise in the past however this seemed to be a little bit of a step up. The darkening got here to full impact proper after the primary week, 2 tanning sessions and some exercise exterior.
The above slicing cycle is suitable only for many who understand and know the method to handle the unwanted facet effects of anabolic steroid use. Wonderful results (such as shedding 15lbs in 4-5 weeks) are seen on cycles starting at 20mcg and solely reaching a maximum of 60mcg per day. Just as a outcome of some individuals assume you have to be taking 80mcg or higher to see results, struggling the unwanted effects of these greater doses is now not necessary to see spectacular fats loss. Clenbuterol’s ability to make it simpler to take away this fats allows competitors to have considerably better muscle definition that may in any other case be masked by overlaying fat. In severe competitions, every ounce of fats counts, and probably the most serious competitors will often add to Clen’s results by stacking it with highly effective fat-burning anabolic https://um.com.co/pages/?testosterona_comprar_3.html like Winstrol. Strive incorporating Cytomel T3 into your common routine as early within the day as potential.
Liver protections have been used for decades by skilled athletes, but also by regular gym goers from all over the world, and increasingly so. Proviron is the brand name of Mesterolone2, which was developed medically to treat hypogonadism in men3, which causes low testosterone. Though it’s typically loosely thought of to be an AAS (androgen and anabolic steroid), it incorporates little anabolic capacity and so has solely weak anabolic benefits. For this cause, Proviron isn’t a type of compounds you will use for mass building or bulking.
A person’s food plan is particularly important when taking Anadrol in regard to water retention. We discover bodybuilders often report extreme bloating on Anadrol when consuming unhealthy meals in the off-season. With the addition of testosterone, the risk of gynecomastia will increase because of higher estrogen levels.
In reality, anabolic steroids normally must be prevented if the person does not possess a wholesome ldl cholesterol studying. For those who are healthy sufficient for supplementation it goes to be extraordinarily essential that they reside a life-style that is conducive to maintaining correct ranges. Massive quantities of saturated fats must be avoided, as nicely as usually unfriendly ldl cholesterol meals. The supplementation of omega fatty acids can additionally be extremely recommended, as is loads of cardiovascular activity.
Such reactions may be useful for exercises; nevertheless, customers should be cautious about this steroid negatively affecting their personalities and shut relationships. If someone is prone to indignant outbursts, they need to keep away from using Halotestin, as it could trigger roid rage. Superdrol is probably the best steroid for power; however, its unwanted effects are also harsh. Our patients often use a liver help complement, SERM, and a strong PCT for harm discount on Superdrol.
Please notice that individual experiences might differ, and it is important to train warning and seek the assistance of with professionals when making buying decisions. These questions and extra shall be answered as we delve into the world of Anavar. Combining it with hCG I consider the mesterolone in it helped to hold some mass and that it appears to have maintained my intercourse need.
Many elements might influence these results, including the dose of T3 itself. 75mcg is a high dose, and 100mcg is what I’d consider extreme and pointless for the vast majority. At this level, you’re placing yourself at much higher danger of side effects like lack of lean muscle, muscle flatness, weakness/fatigue, and anxiety. You’ll in all probability also have near-uncontrollable hunger 24/7, making weight-reduction plan very difficult. To sum up, the best steroids can help you attain your bodybuilding targets sooner, but they arrive with critical risks and are illegal without a prescription.
You won’t know what opposed results you’ll be able to count on from Clenbuterol until you’ve used it. Many guys who frequently test their resting coronary heart fee find a important rise – sometimes 30 bpm or greater than usual. This is Clen’s stimulant results kicking in and its thermogenesis and metabolism-raising exercise. Some males discover it too uncomfortable to have a sooner resting coronary heart rate, leading to a lower within the Clen dose or even stopping it altogether. Here, I want to share simply a few of the experiences and results that guys are seeing with Clen – whether they’re using it by itself or stacked with other PEDs. Clen has bronchodilation and decongestive effects3, and it has a legitimate medical use in some international locations (not the US, however) in treating respiratory circumstances like asthma4. While this results in some fantastic results, it has some downsides you have to find out about before considering Clenbuterol.
For these committed to steroid use, beginning with moderate efficiency and a maximum 12-week cycle is essential. Adopting a «gradual and steady» method is essential for steroid newbies. Anavar, a milder steroid, is good for novices, especially these preferring oral options. With the above general tips in mind, let’s contemplate what happens and the means to shield the liver in relation to the administration of steroids. The worst enemies of a healthy liver are undoubtedly alcohol and fat, particularly fat cooked at excessive temperatures. Caffeine and different alkaloids can in the lengthy term also weaken our liver then, the protection and the restoration of a good barely unhealthy liver becomes a sort of Sisyphean task. The liver secretes bile in nice quantities, as a lot as about 500 to 600 grams per day.
This is as a end result of a better number of androgen receptors are found in these muscles, causing them to be extra vulnerable to elevated hypertrophy (size) when underneath the affect of androgenic compounds. There is not any official data of how many individuals in the UK take anabolic steroids, but latest estimates suggest about 500,000. Ellis said the toughest part of coming off PEDs was the impression on his psychological health and body image. Taking steroids is «psychologically addictive,» he stated, as a outcome of individuals get hooked on the outcomes. «Individuals would come into my office and talk with out hesitation to me about all the cocaine that they used or all the opiates that they took or all of the marijuana they smoked,» he mentioned. Of all the drug cultures Pope has witnessed in his research profession, steroid customers are by far probably the most secretive, he advised Insider. After six years of taking steroids, Ellis ultimately decided to give up when he retired from bodybuilding in 2018.
The confidentiality and anonymity of participants have been maintained throughout the research, and the data collected had been used for analysis purposes solely. All analysis procedures have been performed in compliance with ethical principles as outlined within the Declaration of Helsinki, the applicable rules, and the guidelines supplied by the IRB/IEC. The authors confirm that each one methods have been performed following related tips and rules. All experimental protocols have been permitted by the ethics committee of Analysis in Public Sports Activities Board, Kermanshah, Iran. Additionally, all educated participants and the legal guardian of illiterate individuals were asked to finish the written knowledgeable consent firstly of the research.
Throw in different variables like dosage, cycle length, stacking compounds together, current well being issues – and potential steroid side effects can become much more complex. Some individuals will use it for months; others will restrict themselves to a six or 8-week cycle. This all is determined by your targets and if you’re stacking it with steroids, SARMs, or different fat-burning PEDs. L-tyrosine and iodine are a typical combination to mitigate expected unwanted side effects. And to hold on to your muscle throughout an 8-week blast cycle, stack T3 with any female-friendly steroid or SARM at a low dose, like Anavar.
You can go to the fitness center and bang your head into a wall for forty five minutes and still find yourself getting significantly better results than the everyday pure man coaching accurately and working his off ass. Like all drugs, steroid use has the potential to cause harm. If you’re somebody who makes use of steroids, it’s most secure to take action under the advice and steering of a medical skilled. Most information concerning the harmful results of steroids is at this stage primarily based on low level proof, such as professional opinion, case stories or small observational studies, so we nonetheless want stronger proof. Potential clinical trials which examine the efficacy and long-term effects of recreational steroid use are absent, however there are some important research underway. But other indicators, such as the quantity of steroids confiscated on the country’s borders and the variety of steroid users accessing needle and syringe programs, paint a unique picture. After critically assessing the analysis in this subject, we found people use steroids for a variety of causes.
Hell, because the research above confirmed, medicine can typically make up for not even training at all in the first place. The group getting the testosterone injections and NOT doing any form of weight coaching in any way nonetheless gained significantly extra muscle than the natural guys who WERE weight training. Equally, bodybuilders derive aesthetic pleasure from their physique modification practices. Steroid customers have also reported constructive and pleasurable emotions corresponding to increased libido, greater confidence and elevated well-being and energy.
Unlike the human body as a whole, which tends to gain weight when it has nothing to what do all steroids contain in their structure; https://kekkekamperen.nl/wp-content/pages/afslankpillen_2.html, however hang around, testicles shrink. Facet results So far we’ve looked at the intentional results of steroid use, and solely in lifters who used them efficiently to get impressively jacked. However it’s the unintended effects which would possibly be usually the obvious signs. Such low levels of water retention can look artificial, almost as if a bodybuilder has been photoshopped. Such fluctuations in this male hormone can contribute to steroid habit or dependence, in our experience.
I was actually conflicted about taking them, I lastly determined to take them after taking a glance at a few of the muscle magazines I had. It was funny, the guy who gave me the pills also had by no means tried them before and had similar doubts, but we both ended up taking them. In a seemingly usual Andrology clinic day, I first met Chad. But Chad was completely different, bluntly trustworthy and really clever, he started our appointment by stating, «I really feel horrible, I give up utilizing steroids a number of months in the past and want your help». And each subsequent appointment I did mostly that, as Chad’s data of steroid use (both practically and scientifically speaking) far exceeded my very own.
By understanding esters, you will be in the most effective position to create efficient steroid cycles with compounds that complement each other primarily based on their different half-lives and onset of results. When taking steroids, you’re overriding your body’s production of testosterone. When you stop steroid abuse, it takes your physique weeks to months to get again to making its personal testosterone. Some folks use different medication to counteract the side effects of steroids, «cycle» their use with breaks for «recovery» or «pyramid» use by gradually increasing consumption to a peak and decreasing once more. If you’re illegally using steroids to build muscle or improve your PBs within the fitness center, you’re in all probability utilizing giant doses that present a vastly larger level of hormones than your physique truly wants.
Further, GHRH-agonists similar to tesamorelin might result in complaints associated to water retention, such as joint ache, limb edemas, and puffiness, as a result of their GH-boosting results [48]. On the other hand, peptides are linked to varying http://desperado.cz/_lib/pgs/?clenbuterol_dosering.html effects relying on their construction and functions. For instance, incretin mimetics corresponding to GLP-1 agonists are identified to trigger gastrointestinal disturbances like nausea and diarrhea. Hardly Ever, they could additionally result in hepatobiliary issues such as cholelithiasis and pancreatitis, which are usually delicate to average in severity [47]. TB-500 acts as an actin-binding protein that inhibits the polymerization of globular actin (G-actin) into filamentous actin (F-actin) and alters the mobile cytoskeleton [33, 34]. This affects the ability of cells to move and change shape, which is crucial for wound healing and tissue regeneration [35].
The most blatant clue is that if someone’s fat-free mass index (FFMI) is above 25. Everybody who’s bigger than you… stronger than you… leaner than you… makes extra money than you… and has a warmer girlfriend is on steroids – period! It’s important to notice, nonetheless, that these numbers are based on male lifters. In Accordance to Lyle, females can construct muscle at about half the speed outlined within the method. In other words, Lyle states that males can build 40 to 50 pounds of muscle during their first four to 5 years of correct training and weight-reduction plan, after which the rate of further muscle positive aspects become fairly negligible. You can, nevertheless, make a relatively correct estimate with a formulation created by pure bodybuilder Dr. Casey Butt. Steroids can even have (permanent) long-term unwanted effects, corresponding to liver illness, male-pattern baldness, coronary heart dysfunction, and gynecomastia (breast development).
Pulmicort is usually used on a every day basis to offer long-term management of asthma. Notably, steroids utilized in inhalers are different from anabolic steroids used by athletes. Bronchial Asthma inhalers containing steroids are protected and broadly prescribed by healthcare professionals for asthma administration.
They are often abused by athletes and bodybuilders, resulting in severe well being consequences. In Distinction To corticosteroids, anabolic steroids usually are not used for their anti-inflammatory properties and are classified as controlled substances as a end result of their potential for misuse. Only one of the included studies reported presence of CME at one week after surgical procedure (Chen 2015), but several studies reported this outcome at later follow‐up time points.
From the outcomes of the screened electronic search, bibliography searches and other contacts, two reviewers independently chosen trials which met beforehand outlined inclusion criteria. Trials included individuals over the age of 15 years with continual asthma. Combining 5 of our most powerful muscle constructing and fat burning formulas for amazing, fast-acting outcomes. Gynectrol has been specifically formulated to naturally melt away undesirable chest fats. Nitric-Max is an awesome bodybuilding supplement formulated to help in the direction of blood flow & oxygen circulation, rising your energy, vitality & recovery. Before you even take into consideration steroids, you need to make certain you’ve accomplished EVERYTHING in your energy to maximise yourself.
Nonetheless, you will need to note that WADA bans most peptides, and using them in or out of competition is strictly prohibited. Furthermore, many peptides are analysis compounds, and should be clearly labeled accordingly. For instance, testosterone cypionate has been researched in knee damage patients, and was shown to assist the volunteers retain muscle mass and strength within the affected limb. In The End, administration resulted in quicker rehabilitation and recovery of normal function [28].
Whereas pure bodybuilding might lead to slower features, they are more sustainable and safer in comparability with steroid-induced features, which are momentary and include a risk of unwanted effects. Ultimately, choosing between pure bodybuilding and steroids is dependent upon personal targets, values, and willingness to simply accept dangers. Prednisone and prednisolone appear to be effective and generate solely delicate opposed occasions in sufferers with rheumatoid arthritis, when used at lower doses. However, due to the high danger of bias of RCTs and never being potential to carry out the meta-analysis of the research involving these medication, the evidence of such findings could not be confirmed. According to older evidences, after six months, the effects of prednisolone (maximum 15 mg/day) were significantly better compared to placebo for variety of painful joints, variety of swollen joints, pain and physical operate [21]. Nonetheless, small pattern measurement, high danger of bias and the truth that quality of evidence was not assessed compromise such findings. In phrases of coaching, there have been variations within the training volume between the 2 teams.
Utilizing a spacer with an asthma inhaler has confirmed to be helpful for many people by improving medication supply, making coordination easier, reducing unwanted effects, and providing compatibility with various inhaler types. Incorporating a spacer into bronchial asthma management can significantly improve the effectiveness of the therapy, finally helping people higher management their bronchial asthma and improve their high quality of life. Steroid-containing inhalers might cause unwanted effects, corresponding to oral thrush or hoarseness in the throat. These can be minimized by utilizing the inhaler accurately and rinsing the mouth after each use.
Though use of topical steroids is common, evidence of effectiveness exists just for choose conditions, such as psoriasis, vitiligo, eczema, atopic dermatitis, phimosis, acute radiation dermatitis, and lichen sclerosus. Evidence is proscribed to be used in melasma, continual idiopathic urticaria, and alopecia areata. Some have advised that Cytomel carries an anabolic benefit by enhancing the anabolic action of anabolic steroids. The concept is that anabolic steroids present a greater utilization for carbohydrates, fats and proteins, and as mentioned Cytomel promotes the metabolism of such vitamins.
It is necessary to discuss these choices along with your healthcare professional to find out the most acceptable long-acting inhaler on your particular needs. It’s essential to notice that while these side effects may happen, they’re usually gentle and could be minimized through the use of a spacer system or rinsing the mouth after inhalation. Healthcare professionals will intently monitor the use of these medicines and regulate the dosage as wanted to minimize unwanted effects.
Many US steroid users will turn to Mexico to source Winstrol and different AAS. Whereas it’s straightforward to search out by way of this technique, remember that importing or delivery Winstrol into the US can additionally be unlawful, and penalties will apply if you’re unlucky enough to get caught. Positive experiences will come from those that reap the profit of the onerous, dry, very toned physique that could be obtained rapidly with this steroid. There are 1000’s of happy Winstrol users, but as you may expect, some people don’t have such a optimistic experience. There are many reasons for that, so it’s important to assume about all Winstrol reviews with an open mind and know that every particular person will have a different response and experience with this and any steroid.
As A Outcome Of Winstrol doesn’t have an overly significant effect on building mass (7), we see it usually utilized in chopping cycles to assist retain muscle whereas getting leaner. Winstrol has diuretic effects too, growing muscle striations and the visibility of veins (vascularity). The only draw back to its water-flushing properties is that glycogen ranges can decrease contained in the muscle cells, reducing fullness. Trenbolone is a really powerful injectable steroid that produces massive will increase in lean muscle. Due to an absence of aromatization, it does not trigger any noticeable water retention, making total weight achieve lower than on Dianabol or Anadrol. Sustanon 250 is an effective testosterone ester utilized in bulking cycles to add important amounts of muscle and energy.
Increased vitality will let you full more exercises and carry out day-to-day tasks more effectively. Earlier Than you start your Trenbolone cycle, remember to focus on it with a physician. This is because it is a potent steroid, and there are some potential unfavorable unwanted facet effects that may happen if you take it incorrectly.
Ideally, you’ll need TRT and might get this via your physician; in any other case, acquire the same testosterone and run it without supervision. Stacking in these quick cycles is essential since you’re already getting the utmost of each compound. By combining them, you benefit from a better level of androgens without necessarily rising the chance of unwanted facet effects. Any of the above-recommended stacks, for example, the Dianabol/Winstrol stack, will present satisfactory outcomes. You can use the same ancillary compounds because the week cycle plans, although you won’t get some benefits that want an extended cycle.
https://deunam.iztacala.unam.mx/images/pgs/?comprar_hgh.html steroids, also recognized as steroid alternatives, are compounds formulated by complement firms to imitate the optimistic effects of anabolic steroids but with out the cruel unwanted side effects. Authorized steroids are designed to give you the identical muscle and strength-building benefits as actual anabolic steroids without any of the harmful side effects. Body-building-anabolics is a web-based pharmacy that legitimately sells injectable testosterone. This is amongst the trusted sites to purchase actual steroids on-line and have the medication shipped to either your home or workplace.
Additionally, you won’t need the long-term HGH use on a 12-week cycle, nevertheless it helps enhance gains during the cycle (as are others like IGF). Proviron is a steroid that has some particular makes use of, namely, how it helps improve free testosterone. Proviron is useful for longer cycles where you wish to cut back estrogen issues, add some muscle definition, or assist boost the libido. It is even included as a PCT compound due to its minimal adverse impact on luteinizing and follicle-stimulating hormones. Primobolan can additionally be a DHT-derived steroid, and it’s a great one to make use of in long cycles as it’s a tolerable compound with reduced androgenic effects and milder testosterone suppression. Long-cycle testosterone dosage will vary from 200mg/weekly at the low finish if you’re looking for HRT only… Up to 800mg or even more on the prime end when cruising on a long cycle.
Individual response, HGH quality, dosage, and exhausting dieting are all potential culprits of increased tiredness and other sudden unwanted effects. You will not see prompt or even somewhat quick outcomes with it, so it have to be used at longer cycle lengths if it will be of any profit. It’s frequent for folks to wish to use it for the lengthy run – 6 months or more to reap the entire range of benefits HGH provides. Again, you can’t contemplate that without planning the price of this high-priced product as a result of every week you utilize HGH can price a considerable quantity. It’s not unusual for females to wish to use HGH purely for aesthetic causes because of the anti-aging properties of HGH.
You may even find peptides useful for PCT due to their effects on efficiency and providing some anti-catabolic protection with out the adverse impact on recovering your HPTA functionality. Your decisions will be made based on whether or not bulking or slicing is your main aim. Testosterone is the steroid all of us come again to because it really works and does everything you need, and it’s the only steroid that the majority of us will need to use for a continuous period, with a cycle lasting many months. A normal error is to assume that the half-life of a steroid is a agency and unchangeable number. In some cases, you will see a spread of hours or even days estimating a half-life as a result of particular person elements like metabolism will always trigger variations.
Whether you are a beginner or a seasoned lifter in search of a safer method to improve your performance, hold reading to discover which authorized steroid alternatives are price your funding. These drugs are the most secure and most benign by means of unwanted aspect effects and do not require post-course remedy (PCT), only if done in very brief cycles. This can significantly increase muscle and power positive aspects, taking them to a new level. Though Dianabol may be taken alone and customers can expertise distinctive outcomes, more superior steroid customers sometimes stack it with different bulking steroids. Dianabol additionally has opposed effects on levels of cholesterol; thus, individuals with high blood pressure ought to stay away from Dianabol. We have found that 4 grams of fish oil per day improves patients’ lipid profiles. There are a quantity of supplements and steroids obtainable within the bodybuilding subject which may be used to acquire wonderful outcomes.
This suggests that further work at the molecular stage is required to higher understand the motion of androgens on sebaceous gland perform. There are naturally occurring and synthetic steroids that can be utilized for medicinal purposes or performance enhancement. Anabolic-androgenic steroids (AAS) are synthetic derivatives of testosterone that are sometimes used by bodybuilders and athletes to extend muscle mass however can have critical https://casalesangiorgio.it/wp-content/pgs/acquistare_hgh_1.html effects. The results of AAS are mediated by way of binding to androgen receptors in tissues like skeletal muscle. Anabolic steroids are artificial derivatives of testosterone which have each medical purposes and a high potential for misuse.
While they may not provide the same degree of muscle growth acceleration as anabolic steroids, testosterone boosters are generally regarded as safer and are not banned in most sports. In conclusion, understanding the medical makes use of and differences between anabolic steroids and testosterone boosters is crucial for both healthcare providers and individuals looking for therapy for physique features affected by their testosterone ranges. On the other hand, testosterone boosters are dietary supplements meant to naturally enhance the manufacturing of testosterone within the body. They usually contain components like D-aspartic acid, fenugreek, and zinc to advertise greater testosterone levels. In Contrast to anabolic steroids, testosterone boosters are usually thought of safer and provide more refined effects without the chance of extreme unwanted effects. Because of this, anabolic steroids could probably be a perfect treatment for people with low levels of testosterone.
Blood ranges of other reproductive hormones (such as follicle stimulating hormone [FSH], luteinizing hormone [LH]) can also be measured. If the testosterone may be very high but the FSH and LH ranges are low, this supplies evidence that the individual is utilizing anabolic steroids. The fast muscle growth and energy enhancement linked to steroid utilization can put extreme strain on the tendons. Consequently, people who use these hormones could have an increased probability of tendon injuries, together with ruptures. Taking anabolic steroids alters cholesterol levels and blood pressure, potentially leading to coronary heart illness and other heart-related issues. Due To This Fact, people on these medicine usually tend to experience coronary heart attacks and strokes. Performance-enhancing anabolic steroid users administer it via the oral route, intramuscular injection, subcutaneous injection, or by using transdermal patches.
Additionally, testosterone plays a vital role within the growth of muscular tissues and bones, contributing to male energy and stature. It additionally stimulates secondary sexual traits like facial hair growth, voice deepening, and body hair patterns. The function of the transcriptional activation domains on the receptor is to mediate the binding of the receptor to the comodulators. The receptor has an N-terminal activation function-1 (AF-1) and a second activation function-2 (AF-2) within the C-terminal ligand-binding domain. The mechanisms of AF-1 and AF-2 gene activation, with emphasis on AF-1 and AF-2 conformation and co-activator binding, have been reviewed by Warnmark et al. (2003). The mechanism of AF-1 gene activation isn’t well understood as a end result of lack of conformational data however, in contrast, many crystal constructions of the ligand-binding domain of various nuclear receptors have been achieved, allowing a fuller understanding of AF-2-mediated transcriptional activation.
Nevertheless, shut monitoring by healthcare professionals is essential to making sure the remedy is secure and efficient. All Through the years, biochemists have been attempting to transform and adjust testosterone structure to make medications that can either be taken orally, or have a unique breakdown when dissolved into the body, or even higher, a drug that may do each. After a few years of researching, scientists have come to the conclusion that by substituting and changing certain portion of the testosterone molecule, it could have a big effect on the impact; however sadly, it has not yet been found.
It is of interest that an illicit preparation referred to as ‘The Cream’ was designed for transdermal software (see the part ‘Designer steroids’). If you or somebody you know is experiencing symptoms of low testosterone, don’t let the worry of «steroids» hold you from exploring a medically sound remedy possibility. TRT isn’t about artificially enhancing your physique; it’s about restoring what your physique naturally must function at its best. The extreme use of testosterone and anabolic steroids also increases the risk of liver harm and most cancers [16, 37]. Anabolic steroids which might be administered orally are more harmful to the liver than these which are injected.
Figure from Kicman and Gower (2003b), a commissioned article by the Analytical Investigations Standing Committee, reproduced with permission from the Association of Scientific Biochemists. Testosterone is used as injections of assorted testosterone esters (for instance, testosterone propionate, testosterone enanthate, testosterone phenylpropionate, testosterone isocaproate, testosterone decanoate, and testosterone undecanoate) or as testosterone undecanoate capsules, taken orally. Testosterone— A male steroid hormone produced in the testicles and answerable for the development of secondary sex characteristics. Hypoplastic anemia— Anemia that is characterised by faulty function of the blood-forming organs (such as bone marrow) and is brought on by toxic agents corresponding to chemical substances or x rays.
Anabolic Steroids are synthetic derivatives of testosterone, commonly known as anabolic-androgenic steroids (AAS). Their main medical use is to treat conditions that cause muscle losing, corresponding to most cancers, HIV/AIDS, and chronic obstructive pulmonary illness (COPD). In some instances, they could also be prescribed to treat delayed puberty and testosterone deficiency, which could be a results of hypogonadism or different medical circumstances. However, using anabolic steroids outdoors of those particular medical eventualities just isn’t permitted and might lead to quite a few antagonistic results. Long-term use could cause the physique to supply too many red blood cells and abnormal ranges of fat (lipids) in the blood.
To demonstrate how this problem may be addressed, Thevis et al. (2005) developed an LC–MS/MS screening method primarily based on widespread fragmentation pathways and Nielen et al. (2006) used a combination of androgen bioassay detection and electrospray quadrupole time-of-flight mass spectometric identification. Oral exercise can be conferred by substitution of the 17α-H on the steroid nucleus with a methyl or ethyl group to make the 17α-alkylated anabolic steroids. Alkyl substitution prevents deactivation of the steroid by first-pass metabolism by sterically hindering oxidation of the 17β-hydroxyl group.
Low-density lipoprotein (LDL)—the bad—cholesterol levels increase, and high-density lipoprotein (HDL)—the good—cholesterol levels decrease. Extreme cardiovascular issues, including high blood pressure,heart assault, and blood clots, are reported with the utilization of anabolic steroids. Some athletes, bodybuilders and others misuse these medication in an attempt to enhance performance and/or enhance their physical appearance. Anabolic steroids are the commonest appearance- and performance-enhancing medicine (APEDs). Approximately 3 to 4 million people in the United States use anabolic steroids for nonmedical functions. Anabolic steroids also upregulate and enhance the number of androgen receptors, thus enabling elevated coaching depth and indirectly contributing to increased muscle dimension and power.
The objective of utilizing bodybuilding dietary supplements is to supply assistance to your body in a way that is risk-free and freed from any antagonistic effects. The incontrovertible reality that the product can sustain with the robust work schedule of the professionals has contributed to their rising fondness for the brand. Deca Durabolin is right for novices looking to construct lean muscle while enhancing joint health and recovery. Dianabol is a beginner-friendly oral steroid, offering quick results, but it must be used with warning because of its potential liver toxicity. In the ultimate weeks of your cycle, Winstrol helps reduce fat while keeping your muscular tissues intact.
Also, anybody planning to conceive ought to wait till after finishing the course of remedy. Therefore, you should always just make sure you do not become pregnant during steroid treatment. If you are not sure whether or not you must take steroids, then you must talk to your physician.
Nevertheless, touring with steroids can be a challenging and complicated course of, particularly when it comes to navigating legal rules and guaranteeing their safety during transport. Steroids are anabolic steroids which might be used to increase muscle mass and strength. They are additionally used to deal with sure medical situations such as cancer.
We observe fewer unwanted effects amongst intermediates on Dianabol who have previously utilized a light anabolic steroid, similar to testosterone. We find that endogenous testosterone levels usually normalize a quantity of weeks following cycle cessation. We generally observe cautiously dosed testosterone cycles including 20 kilos of lean mass to newcomers. The androgenic essence of testosterone may also result in adipose tissue loss. Steroids work by appearing on androgen receptors which boosts muscle growth. 18g needles are too big and they’ll eat up your stoppers in a hurry.
The cause why they don’t experience water retention from Anadrol when making ready for a show is that the presence of excessive estrogen levels does not routinely assure water retention. It replicates the muscle-building and strength-enhancing effects of Anadrol, but with out the undesirable side effects. In another research, 31 elderly men took 50–100 mg per day for 12 weeks. The 50 mg group didn’t experience any improve in liver enzymes; nonetheless, the a hundred mg group skilled modest ALT and AST elevations (8). However, the one hundred mg group did not result in any circumstances of hepatic enlargement or cholestasis.
Join the discussion and get essentially the most dependable information on steroids, PCT, and performance enhancers in Australia. If you’re contemplating beginning a steroid cycle, educate your self, consult with a healthcare professional, and follow correct protocols to reduce risks and optimize your outcomes. To mitigate the risks of side effects, it’s essential to use steroids responsibly, monitor your well being frequently, and consult with a medical skilled. In on-line teams and gymnasiums, users experiment on themselves and pass on information Truth About Anabolic Steroids, https://medgatetoday.com/art/buy_clenbuterol_2.html, drug dosages, which steroids to avoid, and what sort of «features» to expect.
They can help you determine one of the best plan of action based on your particular person wants and health standing. Rhodiola and Ginseng enhance power ranges, serving to athletes preserve workout depth, crucial for combating anabolic resistance. Soy accommodates phytoestrogens, which can interfere with testosterone ranges when consumed in extra. For 95% of customers, particularly newbies and intermediates, the bottom compound must be testosterone. These tests help us understand the condition of our patient previous to a cycle, the level of toxicity during, and observe restoration post-cycle. Steroid cycles containing Anadrol, Superdrol, trenbolone, or Winstrol are poisonous protocols.
To begin lowering, use potent fat-burning supplements for fast results. Crazy Bulk supplies three efficient choices for preserving muscle mass and burning fat rapidly. Testosterone Enanthate is widely regarded as the safest possibility for newbies, as it mimics pure testosterone and has a decrease risk of severe side effects. It’s an oral steroid that works fast, usually displaying results inside the first few weeks. These substances are primarily used by athletes, bodybuilders, and people seeking to improve their physical performance or look.
Testosterone Enanthate works by binding to androgen receptors in various tissues. Once sure, it stimulates the receptors to boost protein synthesis, resulting in elevated muscle mass and strength. From beginner-friendly options like Dianabol for speedy muscle gains to Winstrol for slicing fat while preserving lean mass, there’s a safe and efficient option for each objective. It works along with testosterone and Dianabol to boost muscle development and add better definition.
The peak degree of focus in your blood shall be reached after about seventy two hours, and the results ought to be noticeable within one to two weeks of use. And lastly, give suggestions on the best pure alternative to Trenbolone – that gives the identical (or much more) better outcomes than Tren. The publisher solely promotes merchandise which have been independently evaluated and deemed potentially helpful to readers. Nevertheless, this compensation could influence the content, matters, or products mentioned on this article. The views and opinions expressed are these of the writer and do not essentially replicate the official coverage or position of any affiliate companion or product supplier.
Carpal tunnel syndrome is principally thought-about a short-term side effect, however in uncommon instances, it could lead to nerve damage, leading to permanent lack of sensation within the hand space. This can be a dosage-dependent side effect you could avoid by utilizing HGH sensibly. HGH customers usually report headaches and other symptoms similar to flu. These are usually very short-term and sometimes subside inside a quick while of beginning HGH use. If PCT is required, a normal Nolvadex 4-week cycle is sufficient. Clomid, Nolvadex, or Enclomiphene taken for 4-6 weeks is normally enough. Finally, we can’t evaluate HGH and Anavar with out discussing the price.
Trenbolone is perhaps essentially the most superior anabolic steroid one can use, so it also wants to be included in any superior cycle with HGH. Skilled sportspeople and amateurs alike are more and more inquiring about the use of legally out there anabolic steroids article — https://mik-piwgroep.nl/wp-content/articls/?clenbuterol_kopen.html -. For them, sports activities pharmacology isn’t a new notion, however it’s nonetheless unknown and untested. You will never know, for positive, whether doping is a viable various to simply coaching alone until you learn about all of the aspects. Bodily and psychological stressors are growing quickly in sports activities as athletes compete for recognition and victory, whereas coaching can sometimes push human capacities to their limits. The athlete thus begins to ponder how far they’ll lengthen these limits.
With its benefits past muscle constructing or fats loss, all women and men can benefit from HGH. Its results on therapeutic and recovery are sometimes the only cause folks need to use HGH. HGH can present that extra push-through; the results will speak for themselves. I would aim for a minimal of 12 weeks if muscle growth is your primary aim; otherwise, it’s not value the fee. For fats loss, basic rejuvenation, restoration, and different low-level benefits are your goal? Nonetheless, those using HGH with a longer-term outlook will look at utilizing it for six months and beyond.
If you are a younger athlete, new to using steroids, or happen to fear needles, you can see oral steroids pretty convenient. However, if you’re experienced and courageous enough to inject yourself safely, then you need to go for the injectables. It is important to notice that individual responses to Anavar could range, and results depend on varied factors similar to dosage, diet, exercise routine, and general way of life. Consulting with healthcare professionals or experienced health advisors can present personalised steerage and assist people optimize their Anavar usage for attaining their particular health goals. Furthermore, Anavar stimulates the production of pink blood cells through a process called erythropoiesis.
Hypertrophy (size increase) and hyperplasia (increase in cells) are on the core of HGH’s capabilities. The body regulates how a lot these processes happen by controlling how much HGH is released. Fortuitously, most customers will average HGH dosages sufficient to keep away from these serious unwanted facet effects completely. It can come as a shock that Anavar, for girls, despite being a steroid hormone, can cause fewer unwanted aspect effects than HGH. At low doses, many women can avoid virilizing unwanted effects with Anavar. While HGH has a unique facet impact profile, most individuals will nonetheless experience a few of them, even at decrease doses.
Anavar can help women to achieve their objectives with none health complications.Ladies also can use Winstrol and Deca Durabolin too. These two steroids help to extend energy and performance ranges. So, they are perfect to make use of in both cutting and bulking session in ladies. If you would possibly be discovering steroids for sale, that you have to use in each phases. You can go along with these two medication.Primobolan and Deca Durabolin are additionally two extraordinarily appealing steroids in girls.
The greatest PCT merchandise embody anti-estrogens like Clomid, Nolvadex, Arimidex, or Proviron and supplement with Human Growth Hormones (HGH) like Beltropin or Human Chorionic Gonadotropin (HCG). Viktor pummels Donnie, breaking his ribs and brutally injuring his kidneys, but is disqualified for landing a punch on Donnie while he was down. With Donnie injured and his confidence shattered, Viktor ascends to the top of the boxing world due to his unmatched power punches, and Drago’s good standing with Russia is partially restored. Ludmilla appears during a dinner assembly, causing Viktor to storm out in disgust. He scolds Drago for seeking validation from the very people who turned their backs on him when he needed them. After Donnie accepts the battle and Rocky refuses to coach him, Drago intensifies Viktor’s training routine adding weighted chin ups, and battle rope push ups. Throughout the weigh in, Drago taunts Donnie, telling him he is much smaller than Apollo was.
Are you contemplating to purchase Anavar, the extremely sought-after anabolic steroid identified for its performance-enhancing effects? Whether you’re an skilled athlete or a health enthusiast looking to take your training to the subsequent stage, purchasing Anavar requires careful consideration. In this comprehensive information, we’ll offer you useful insights, precautions, and trusted sources to ensure a safe and knowledgeable shopping for expertise. HGH is, after all, a naturally occurring hormone, and by providing your physique with an external source (and normally a better amount), you would possibly wonder if this affects your natural development hormone operate. Newbies who want an all-around results of muscle features and fats loss will take a glance at stacking HGH with a testosterone ester like Testosterone Cypionate. HGH must be used for a minimal of 16 weeks at 4iu day by day to get the complete profit, with testosterone at 400mg weekly for the second half of the cycle solely.
They are produced within the form of solutions in both ampoules or small vials. In order to correctly administer an injection, you’ll need a syringe which is definitely obtainable out of your native pharmacy with no prescription. We provide 100% discreet and protected delivery base on our many years of confidential packaging and delivery expertise.
Typically these are known as evohalers (depending upon the manufacturer). If you do, it means your bronchial asthma isn’t nicely managed — speak to your doctor or asthma nurse, they usually might counsel a change in treatment to get issues higher. There are recognized circumstances of doping in sports activities with trenbolone esters by skilled athletes. Trenbolone and 17-epitrenbolone are each excreted in urine as conjugates that can be hydrolyzed with beta-glucuronidase.[24] This implies that trenbolone leaves the physique as beta-glucuronides or sulfates. Do not share prednisone with different people, even if they have the identical condition as you.
T4, also known as Levothyroxine Sodium, is an artificial form of the thyroid hormone thyroxine. It is used medically to deal with hypothyroidism and certain kinds of goiters. In the context of slang for steroids, T4 refers to the use of Levothyroxine Sodium by bodybuilders and athletes to increase metabolism and promote fat loss. T4 is believed to reinforce the body’s capacity to burn calories and make the most of energy extra effectively. T3, also referred to as Liothyronine Sodium, is a synthetic type of the thyroid hormone triiodothyronine. It is used medically to deal with hypothyroidism, a situation during which the thyroid gland does not produce enough thyroid hormone.
So not solely do you’ve more muscle, you want less rest between exercises – fairly useful if you’re an athlete. While they sound like a muscle-building miracle, anabolic steroids can have long-lasting results on the our bodies of those who misuse them. As instructed by their name, anabolic-androgenic steroids bind to receptors inside the cell referred to as androgen receptors. The complex shaped by the receptor and steroid enters the nucleus, where they interact with DNA to extend the exercise of sure genes – significantly ones which would possibly be concerned in male puberty and protein synthesis. These genes make the cells produce more proteins than they often would.
Your physician might advise you to take medicine referred to as bisphosphonates, or calcium and vitamin D supplements, together with the steroids to assist forestall this. Regular exercise, particularly issues that involve your bones carrying the load of your physique, such as walking, can also help to reduce the danger of getting osteoporosis. Steroids can sometimes have an effect on diabetes, hypertension or epilepsy, so you’ll have your blood strain and blood sugar ranges checked once in a while.
This means it does not give instant relief of symptoms (like a reliever does). After a week or so of remedy with a preventer, the symptoms have often gone or are much lowered. Some kinds of microbes that cause infections (such as micro organism or viruses) can stay in the physique after you get well from that infection.
Fused rings makes steroids ridge and unable to bear cyclohexane ring-flips As A End Result Of of sterics, substituents in the equatorial posltion tend to be more energetically favorable. The -OH group present in ldl cholesterol is within the more secure equatorial position while the two -CH3 teams on the steroid ring are each in an axial position. Steroids play an integral half in maintaining the structural integrity and functionality of cell membranes. Cholesterol, a predominant steroid in animal cells, is interspersed within the phospholipid bilayer, where it acts as a modulator of membrane fluidity.
«Gym Candy» implies that steroids are like sweet for these who frequent the fitness center. Deca Durabolin is probably one of the most commonly used anabolic steroids among efficiency enhancing athletes. It is well known for being a tremendously helpful low season mass steroid, but it’s also a favorite in lots of athletic circles for its therapeutic advantages. Due to its large therapeutic advantages, the Nandrolone hormone is doubtless considered one of the most beneficial anabolic steroids in medical apply. Nonetheless, because of years of anabolic steroids reviews [https://bundesverband-kosmetik.de/media/pgs/clenbuterol_kaufen_1.html] steroid controversy such use has been quite restricted in the united states for a quantity of years.
There are multiple spectroscopy analyses that may be taken including 1H NMR, 13C NMR, IR, Mass spectrometry, and UV/vis spectroscopy. We have strict sourcing tips and only hyperlink to respected media websites, academic research institutions and, every time possible, medically peer reviewed research. There are varied sorts however they all work in the identical way — an example is proven above. The spacer between the inhaler and the mouth holds the drugs like a reservoir when the inhaler is pressed. Accuhalers, clickhalers, easyhalers, novolizers, turbohalers and twisthalers are all breath-activated dry powder inhalers. This sort of inhaler is fast to make use of, small and handy to carry. It wants good co-ordination to press the canister and breathe in fully at the identical time.
The time period «rhino ‘roids» combines the word «rhino,» which signifies power and energy, with «roids,» a brief type of steroids. «Sauce» is a colloquial time period that will have originated from the concept that steroids are a secret ingredient or sauce that enhances performance. The term «steroids» refers to a class of natural compounds that play essential roles in lots of physiological processes.
The absence of a warning for a given drug or drug combination by no means must be construed to indicate that the drug or drug mixture is secure, effective or acceptable for any given patient. Drugslib.com does not assume any responsibility for any aspect of healthcare administered with the assist of data Drugslib.com provides. The info contained herein is not meant to cover all possible uses, instructions, precautions, warnings, drug interactions, allergic reactions, or adverse effects. If you have questions about the drugs you take, examine together with your physician, nurse or pharmacist.
It can take years of consuming proper and grueling workouts within the gym, and there’s still no assure you’ll get the physique you want. If you are pondering of using steroids for the first time, you should begin with Deca Durabolin and Testosterone. They will give you an excellent head begin in your efforts within the fitness center.
This dependence can manifest as a compulsive need to use steroids, even in the absence of medical necessity or athletic competitors. One of the well-known psychological results of steroids is the incidence of «roid rage.» Some people who use steroids could expertise heightened levels of aggression, irritability, and anger. This aggressive behavior can manifest in various ways, including verbal and bodily confrontations, outbursts of anger, and impulsive actions.
Steroid stacks amplify the effects of particular person compounds, delivering sooner and more highly effective results in muscle progress, fat loss, and general athletic performance. Dianabol enhances protein synthesis and nitrogen retention, creating an anabolic setting for speedy muscle development and energy gains, usually delivering noticeable results within weeks. For instance, Dianabol is a fast-acting oral steroid that promotes fast muscle progress, whereas Trenbolone and Testosterone present long-lasting, dense muscle positive aspects. Deca-Durabolin not solely helps muscle development but additionally improves joint health, making it perfect for heavy lifting cycles. Together, these steroids deliver highly effective results for anybody seeking to pack on critical dimension.
It Is usually used during cutting cycles to protect muscle while getting lean. Whether Or Not aiming to spice up your stamina, improve your recovery, or elevate your general coaching experience, exploring efficient options can help you reach your goals. Steroids like Clenbuterol increase metabolism and fat oxidation whereas preserving lean muscle, helping customers obtain a shredded, defined physique. This steroid is ideal for enhancing muscle definition and creating that dry, shredded look. Winstrol reduces water retention, giving your muscular tissues a more durable, extra vascular look. For bodybuilders and weightlifters looking to pack on serious dimension, choosing the proper bulking steroids is essential. An unplanned cycle is like heading into the gym with no workout plan—it’s a recipe for wasted effort.
My BMI level right nows at four.1 % as per the water boyance take a look at. Yes I know its low, I attempt to get it up however the lower I get my bmi the quick I turn out to be. I weight as of now after the Rhabdo incident 158, I was at one point 185 in an attempt to «bulk» earlier than coaching for a triathlon. Westclock no onerous emotions and thanks on your model of a reality examine and your honesty. I can take a success or two and sometimes I know I come off like what some would call «a faggot.» To me its the best way I can communicate as a outcome of I am new and I already sound like a moron asking for help. Imagine me I actually have the same work ethic and drive as everybody who has replied to me here to be the most effective. The way you talk, you think that steroids are magic pixie dust and so they could make you better at anything and every little thing.
According to Stray-Gundersen, «Roughly 50 % of the medalists had such irregular blood profiles that they virtually may only be due to doping.» Sounds pretty unhealthy. However then again, «Half the people who gained medals have been clear,» he provides. Put one other way, half the medalists who cheated were overwhelmed by clear skiers. This is pretty strong evidence that doping does not give any athlete an insurmountable benefit. Observe us for exclusive insights, coaching suggestions, behind-the-scenes content material, and the newest updates to the weblog. Stay informed, inspired, and engaged as you pursue your health journey with Omega Full Potential. Anavar can be recognized for its capacity to reinforce muscle hardness and vascularity.
Testo-Max is an alternative to the popular injectable anabolic Steroid side Effects in men (https://www.stadt-berga.de/wp-content/pgs/dianabol_kaufen_1.html) Sustanon, which has numerous harmful unwanted effects. D-Bal Max is a natural alternative to Dianabol, formulated to provide the same energy and measurement features without any unwanted side effects. I’ve personally examined all these supplements for no much less than a month and will explain under why I recommend them if you’re looking to build muscle fast.
Dianabol is a popular oral steroid well-known for providing massive gains in muscle mass and strength, but it has additionally been linked to varied nasty unwanted effects. Whereas there are a bunch of fine authorized steroids on the market, D-Bal is probably the most powerful and my absolute favourite. The three are one of the best steroid stacks for bulking within the bodybuilding world. Testosterone Cypionate is, undoubtedly, probably the greatest steroids for power. As one of the protein’s building blocks, extra nitrogen means extra protein. The use of steroids by professional athletes sets a harmful precedent for younger, aspiring athletes. When younger athletes see their function fashions using performance-enhancing medicine, they might really feel pressured to do the same in order to succeed.
It’s a good way to stay motivated and hold monitor of your total progress. Prioritize a cautious and gradual approach, steering clear of sudden dosage increments or extended cycle lengths. Most importantly, by no means overlook the significance of a balanced food regimen and consistent train alongside your Winstrol cycle. A comprehensive approach to health will yield the best results, guaranteeing the advantages of the steroid are maximized while the dangers are kept in check. Elevate your fitness expertise with a thoughtfully deliberate Winstrol cycle, where the period holds the vital thing to unlocking optimum outcomes. Most cycles vary between six to eight weeks, providing ample time for the steroid to make a big impact on muscle improvement and efficiency. New users should go for a shorter cycle to check their tolerance and evaluate the outcomes.
If you need to prepare more durable, get well faster, and see larger outcomes — naturally — Testo-Max is a no-brainer. For best results, take 3 capsules of D-Bal approximately 45 minutes after your exercise. Consistency is key — use D-Bal for no much less than two months combined with a correct diet and training routine for max results. Ultimately, world-class athletes have a variety of bodily and psychologic attributes that allow their success in competitors.
Долой суету: аренда яхты — это ваше пространство для релакса
аренда яхты аренда яхты .
Drug-induced liver harm (DILI) is a known attainable dangerous effect of utilizing anabolic steroid-containing merchandise. Muscle growth promoters are being developed for the remedy of disease-induced lack of muscle mass. Ligandrol and ostarine are selective androgen receptor modulators (SARMs) with a non-steroidal construction and a presumably more favorable facet effect profile. In recent years, these substances with or with out «post-cycle therapy» (PCT) are often misused by amateur athletes aiming to advertise muscle development.
17b-hydroxy-2a, 17b-dimethyl-5a-androstan-3-one-azine, aka Dymethazine is an azine, two superdrol molecules attached to one another by a nitrogen atom. When digested stomach acid separates the two superdrol molecules from one another allowing them to travel to the androgen receptors. DMZ Prohormone, like different prohormones, can even influence the physique’s natural hormonal steadiness. Users would possibly experience fluctuations of their testosterone and estrogen ranges, which might result in side effects like gynecomastia (development of breast tissue in males), temper swings, and pimples. Managing hormonal stability is pivotal, as it not solely impacts bodily attributes but also emotional and psychological well-being. Different causes of acute liver injury similar to viral, ischemic, autoimmune, obstructive, and poisonous etiologies were evaluated and excluded in this case. While no re-challenge with Tremendous DMZ Rx 2.0 was beneficial or carried out to ascertain it because the wrongdoer, that was the one treatment the patient was taking, and discontinued use result in a gradual lower in liver enzymes.
They can nonetheless trigger the identical unfavorable unwanted effects as they did pre-2004. So far we have lined what is Superdrol, its muscle-building results and how it can have some fairly critical well being consequences. Talking of the latter, nothing is more dangerous on a methasterone cycle than the potential liver problems. Milk thistle is essential when taking the Superdrol steroid because it could possibly detoxify your liver and help new liver cells regenerate. 1g of milk thistle daily is an effective quantity to help defend your liver. Some bodybuilders will also use N-Acetyl Carnitine (NAC) for further supplementation on a Superdrol cycle.
In some countries, it’s available over-the-counter, whereas in others, it is categorized as a controlled substance. Enhance penile function, get more durable fuller and longer-lasting erections, increase stamina in bed and last longer, go extra rounds. Hurt discount targeted discussions related to protected usage of AAS, TRT or hormone replacement with the exception of sourcing data.
Every stack unveiled a singular aspect of muscle transformation, underscoring the flexibility and the potential that lies within DMZ Prohormone Cycles when mixed with different prohormones. Cholangiocytes express androgenic receptors in animal models, which modulate cholangiocyte proliferation and secretion[30]. In the absence of androgenic signaling after rat castration, cholangiocyte proliferation has been impaired. However, data from human research on the results of androgen receptor signaling in cholangiocytes are missing and must be investigated within the future[31]. Given that Dymethazine Powder has a half-life of 10 to sixteen hours, it is recommended that you just cut up your doses every eight to 10 hours to get their most impact. Many users of this prohormone recommend having one capsule of Dymethazine Powder within the morning and taking one other in the evening.
Making Certain adherence to local laws and regulations relating to prohormone use is pivotal to stop potential legal repercussions. In many international locations, together with the Usa, Mebolazine is assessed as a controlled substance and is towards the law to own with no prescription. It can also be banned by most sports activities organizations because of its potential to give athletes an unfair benefit. It is necessary to note that it is unlawful in many countries and is taken into account a controlled substance. It is classed as a «drug of concern» by the World Anti-Doping Agency (WADA) and is banned for use in skilled sports activities. The preliminary therapy included 300 mg intravenous N-acetyl cysteine four occasions day by day, 1000 mg oral UDCA day by day, and 450 mg silymarin day by day.
In this essay, we will talk about the advantages, disadvantages, dose, and cycle of this powerful prohormone. 2-cyano-17a-methyl-17b-hydroxy-androst-3-one, aka Cyanostane is a extremely powerful anabolic compound with incredibly low androgenic motion. This makes Cyanostane just like Oxandrolone or Methenolone (primobolan) in its effects. Cyanostane doesn’t aromatize which means no estrogen mediated unwanted effects will happen. In addition, its excessive diploma of anabolic motion makes Cyanostane the proper compound for athletes wanting to maintain a rise muscle mass whereas losing physique fat. The attributed reduced restoration time from DMZ Prohormone enables athletes to doubtlessly expedite their bodybuilding journey by permitting more frequent and intensive training sessions. This shortened recovery is pivotal, especially in high-intensity training regimes like powerlifting and HIIT, promoting faster muscle development and strength development.
Presently approved makes use of of androgenic steroids embrace androgen deficiency, delayed puberty, breast most cancers, postpartum breast engorgement, hereditary angioneurotic edema, endometriosis and fibrocystic breast disease. The androgenic https://macromicro.it/wp-content/pgs/?integratore_testosterone_2.html are additionally used off label and illegally as a means of accelerating muscle mass and athletic efficiency. The abuse of anabolic steroids is especially common among physique builders and younger male athletes, though their use has been banned from the Olympics and in main professional and school sports. Just Lately, anabolic steroids have been present in some dietary supplements available over-the-counter or by way of the web that are advertised as rising a way of wellbeing and muscle mass or as an help to body building.
This means Dymethazine will produce gain with little to no liver impression and will trigger no estrogen associated unwanted effects. The psychological and emotional impression of DMZ Prohormones should not be missed. Some customers have reported experiencing temper swings, nervousness, and despair during or after utilizing the prohormone. The mental and emotional toll can be significant and warrants consideration and monitoring throughout utilization. In sensible situations, bodybuilders who’ve utilized DMZ often report noticeable enhancements of their muscle dimension and lifting capabilities within a quantity of weeks of utilization.
For instance, figuring out previously undiagnosed dyslipidemia or cardiac disease might serve as motivation for some patients to contemplate cessation. The following sections will present background, unwanted effects, and hurt discount methods for generally used AAS/PEDs. Pissed Off with the lack of know-how and lack of assistance from his physician, he resorts to following recommendation of other men utilizing AAS.
A post-cycle remedy might start when Dianabol has absolutely exited the body. This could be calculated by taking Dianabol’s most half-life of 6 and multiplying it by 5.5. Thus, post-cycle remedy for Dianabol might begin 33 hours after the last dose.
After the waiting interval, it’s time to slowly reduce the weekly dose for about six weeks until you’re fully off every little thing. Everybody could have a different alternative of ester, with mine being enanthate as a outcome of I can inject twice weekly. If utilizing other forms like Sustanon or Propionate, you probably can break up the dose into three times weekly.
Underground lab HGH comes with many dangers, not the least of which is the under-dosing of the method. Anyone who has used real pharmaceutical-grade HGH will normally say it was properly worth their investment. The high price is justified by the high-quality HGH that delivers the expected results on the proper dosage. It’s important to remember that pain in the joints whereas utilizing HGH in the early levels isn’t an indication that the joints are broken but is a aspect impact of the restore and development process that HGH is stimulating.
Testosterone, Anavar, and Dianabol are the three most typical steroids used by novices and are arguably the most optimal. The major goal of this cycle is to arrange the body for the following cycle, which is ready to yield larger positive aspects. A additional advantage of Andriol (oral testosterone undecanoate) is that it bypasses the liver and is absorbed via the lymphatic system. Consequently, it isn’t hepatotoxic and poses no threat to the liver, in accordance with our LFTs (liver perform tests).
Let’s dive into the key aims and essential elements of an effective PCT. If you’re aiming to extend muscle mass, your protein consumption must be a minimum of 3-3.5 grams per two pounds of body weight per day. Moreover, your caloric intake ought to attain forty kcal per two pounds of body weight per day. To achieve a pronounced anabolic impact while ensuring safety, it is strongly recommended to reduce the dosage by half.
As A Result Of Dianabol is C17-alpha alkylated, it is measurably poisonous to the liver and should not be run for periods higher than four to six weeks at a time. This is only really helpful for long-time, extremely experienced, or older users who have no considerations about pure testosterone levels. Some imagine very lengthy cycles ranging from 3 to 9 months can bring everlasting positive aspects.
A week standard cycle should offer you two cycles every year with sufficient recovery time in between. The half-life of a steroid gives you a technique of figuring out how long that steroid will remain active in your system at a level the place performance and bodily advantages will be noticeable and achievable. Once you’ve injected, the ester begins to detach from the hormone, and the place it’s a lengthy ester, it can take every week or two earlier than the consequences of the steroid kick in. It additionally takes longer to exit your system once you cease injecting, and this impacts when you begin PCT. After you’ve taken a steroid orally or by injection, the steroid travels through your bloodstream (at a velocity controlled by an attached ester, if one exists) and to the muscular tissues. Androgen receptors within the Muscle gain steroids — https://piganddac.com/news/dbol_tren_test_cycle.html — tissue receive the steroid, and once inside the muscle cell, the steroid can additional stimulate protein synthesis17. A bodybuilding affected person of ours states that the present costs for testosterone cypionate, enanthate, and propionate range from $45 to $50.
Symptoms are sometimes self-limiting and can resolve with time. People will get well from prednisone withdrawal once their physique begins producing enough cortisol once more. Treatment for prednisone withdrawal focuses on managing the symptoms and controlling the body’s cortisol production. Anybody experiencing signs of prednisone withdrawal after decreasing the dose or stopping the medication ought to consult a physician.
It is more more likely to gain weight should you obtain systemic corticosteroid therapy. When you stop taking steroid remedy, you’ll be able to usually shed weight in six to 12 months. Some researchers have linked glucocorticoids to weight gain as an antagonistic effect. The use of steroids could cause bone loss, hypertension, and elevated blood sugar. If you utilize steroids to gain weight, the dose and duration of your remedy will have an impact on your weight achieve. Numerous studies have found that taking prednisone at 7.5 mg per day for greater than 60 days will increase the chance meaning of anabolic (https://www.heritagegloves.com/articles/why_clenbuterol_stacked_what_are_the_most_popular_options.html) weight gain. Achieve of steroid weight is often halted after 6-12 months.
Loss of muscle mass has been carefully linked to mortality in these diseases and stopping it can enhance therapeutic outcomes and extend lifespan (11, 12, thirteen, 14). While steroids’ muscle-building capabilities are nicely documented, they come with several potential unwanted aspect effects. Her name is Kate Takopoulos,and she’s the only Registered Pharmacist (that I know of) who can also be aCertified Clinical Nutritionist.
It is possible that steroids will assist with a big selection of situations, but they’ll also have unwanted effects. Steroids, like all drugs, have their very own set of side effects. Weight achieve is amongst the most typical unwanted effects of steroids and can take many forms, relying on the dose and length of treatment.
Several key causes explain this deficit within the literature. Third, as properly as, poor patients’ compliance to testosterone therapy is of paramount significance in the effectiveness of testosterone remedy. These components explain, partially, the neutral effects of testosterone therapy on weight observed in some research. Schoenfeld et al.[118] showed that adherence rates to testosterone remedy are variable relying on formulations and therefore differing outcomes are anticipated. Most cancer patients lose weight throughout treatment, although sure therapies — notably those for hormone-driven malignancies similar to breast and prostate cancers — can trigger weight acquire.
Low doses of prednisone can even lead to weight achieve if taken in the lengthy term. Steroids change the body’s mechanism of absorbing lipids, proteins, carbs, and glucose, amongst other things. It results in weight gain by rising appetite and modifying the body’s fat storage areas.
Though it’s onerous reducing weight when on steroids, it’s not unimaginable. With a clean food plan and regular train, you’ll be able to simply lose the extra pounds. You will really feel hungry extra typically, however you must learn to control it. Make certain your food plan consists of low sodium and excessive potassium meals gadgets to manage the electrolyte disbalance and keep away from bloating. Rising your every day water intake not solely helps you lose more weight but also cuts down your appetite. This is among the many best answer to how to not acquire weight on oral steroids.
Most Cancers patients ought to eat a variety of meals and especially make sure they get sufficient protein, which is found in foods similar to meat and seafood. For instance, visceral adipose tissue cells are bigger, they’re extra inflammatory, more insulin resistant, and are more responsive to the fat-storage effects of insulin, according to this examine. Keep In Mind, the goal of these remedies is to enhance your well being condition. You won’t receive remedies specifically to cut back your moon face. These are risk components for Cushing’s syndrome and for hypothyroidism.
This is as a result of it is among the many greatest AAS for muscular endurance; thus, cardiovascular efficiency will vastly enhance because of a notable enhance in red blood cell production. We see Turinabol users construct reasonable quantities of muscle and burn noticeable quantities of fats, just like the potency of Winstrol however with extra muscle fullness. Thus, as a end result of Anavar’s low toxicity, we discover that customers usually don’t expertise any apparent unwanted effects when taking this compound. Nonetheless, if abused with excessive dosages or overextended cycles, dangerous unwanted facet effects can happen.
Weight achieve is feasible in the brief time period on account of steroid use, however it’s normally momentary and subsides after some time. When you’re involved about weight acquire, discuss together with your physician about how a lot prednisone you require and the way lengthy you want to proceed to take it. Anabolic steroid usage has been linked to an increased danger of coronary heart illness due to alterations in levels of cholesterol and blood pressure elevation. Whereas certain performance enhancers could assist users lose weight via improved physical capabilities, many steroid compounds result in weight acquire, significantly corticosteroids.
This misuse is commonly pushed by the desire to excel in competitive sports activities, improve bodily look, or achieve personal health targets. However, the misuse of anabolic steroids carries important well being dangers, together with liver injury, cardiovascular issues, and extreme hormonal imbalances, which can result in long-term well being issues. This meta-analysis has a quantity of limitations that ought to be thought-about. First, a lot of the included research have been observational, which makes it difficult to determine causation definitively. The AAS use was unregulated and unsupervised AAS use and subjects in some studies resorted to polypharmacy. Third, the lack of knowledge on dosing limits us from making further recommendations on the identical.
General, the side effects of Primobolan will primarily revolve around androgenicity and ldl cholesterol. But once more, most healthy adults, including women can supplement without the side effects of Primobolan being an issue. Right under we document some of these major side effects of steroid pictures for muscle and your body as we go in-depth about anabolic steroids. Anabolic-androgenic steroids should solely be prescribed by a medical physician for clearly defined medical causes. Athletes who wish to select a short path to better physique and efficiency by using artificial testosterone analogues should concentrate on severe opposed effects. Nonetheless, the recovery process can take time, and the period largely depends on the extent and duration of your steroid use.
These with such an addiction may have difficulty stopping use of steroids and will crave the drug the more its use continues. Also, https://nkstraatmuzikanten.nl/pages/trenbolone_kopen.html somebody hooked on steroids finally ceases using it, they expertise ache much like withdrawal pains of different drug sorts. Different unwanted aspect effects are muscle weak point, eye problems (including cataracts), and a higher threat of diabetes. Short-term use may cause weight achieve, puffy face, nausea, mood swings, and bother sleeping. You may also get thinner pores and skin, pimples, unusual hair progress, and spikes in blood sugar and blood pressure. As A Outcome Of corticosteroids turn down your immune system, taking them makes you more likely to get infections.
Health care suppliers ought to be aware of patients susceptible to anabolic-androgenic steroid misuse. Ongoing affected person education concerning the potential unwanted aspect effects ought to be provided for patients who take androgens for therapeutic use. Well Timed identification of the anabolic steroid abuse and appropriate referral for therapy is extremely warranted. Our analysis revealed structural brain differences between dependent and non‐dependent AAS customers. Particularly, the dependent group showed thinner cortex in pre‐frontal areas concerned in inhibitory control and emotional regulation. This is in accordance with the proposed addictive properties of AAS and poses a possible explanation to why some customers progress from harmless initial use to hazardous use and dependence.
This will increase the levels of bad ldl cholesterol and can cause a number of coronary heart issues and even hypertension. The excessive ranges of exogenous testosterone can thicken the blood, inflicting the formation of blood clots within the circulation. The hormonal balance between testosterone and estrogen is disturbed when women take steroids. Moreover, unlike some other unwanted facet effects, gynecomastia is not reversible after stopping the use of steroids. When less testosterone is produced, there aren’t sufficient ranges of natural DHT, a hormone responsible for the maturation of the scrotum and testicles. While the physical options of steroids are extravagant, the unwanted side effects that it takes to achieve these features are often unavoidable. Steroids also scale back the exercise of the immune system, the physique’s pure defence towards illness and an infection.
The use of an anti-estrogen just isn’t needed because of the usage of the Methenolone hormone. If gynecomastia or water retention occurs it’s because of different steroids you could be utilizing as each are physically unimaginable with this steroid. And, if used for the long-term, it can have detrimental health results.
AAS‐dependence was evaluated in a standardized scientific interview utilizing a model of the Structured Medical Interview for DSM‐IV, adapted to use to AAS‐dependence. This research used cross‐sectional knowledge from a longitudinal study on male weightlifters. This can help deal with autoimmune circumstances, similar to rheumatoid arthritis or lupus, that are brought on by the immune system mistakenly attacking the physique. Inform your doctor when you take some other medicines, together with natural treatments and dietary supplements, before starting steroid tablets. If you’ve ever wondered how the cumbersome weight lifters down on the health club get so big, typically it isn’t via a strict routine of weight lifting and diet, however by way of the illegal use of steroids. Remember that the risk of ED from steroid use can depend on varied elements, together with the sort of steroid, dosage, period of use, and particular person physiological responses.
As there are no systematic investigations of the results of doping with high-dose AAS on testicular perform, contraceptive trials could function a model for what happens underneath AAS suppression. Our findings additionally delve into the gradual reversibility of AAS-induced fertility points. These variables aren’t strictly managed in the included research in this evaluation. Non-uniform study inhabitants, observational nature of the research included in our review and variable period, type and dose of the AAS use could additionally be a believable purpose for these findings. This was addressed by Christou et al. wherein the impact of testosterone-containing regimen and routine with out testosterone was analysed separately. Such subgroup evaluation was not possible in our meta-analysis as interventional studies with sole brokers were scant in our evaluate.
Dizziness, headache and nausea have also been reported as unwanted aspect effects, based on a study printed in the British Medical Journal. Steroids similar to Dianabol usually cause circumstances of severe zits, according to the U.S. Abuse of Dianabol also can cause an oily scalp and thinning of the hair, resulting in male-pattern baldness in women and men. In men, Dianabol can cause breast growth and shrinking or atrophy of the testicles.
This may help athletes practice extra frequently and with greater depth, resulting in quicker muscle progress and overall progress. For safety from estrogen related side effects you presumably can run an anti-estrogen during your cycle. Superdrol is among the most potent steroids we’ve observed in regard to muscle hypertrophy and power. It is perhaps the most optimum steroid for reworking a person’s physique shortly, with a brief half-life of 8–12 hours. Its effects are androgenic in apply; thus, when mixed with a calorie deficit, users can count on enhanced fat loss. Dianabol aromatizes, and thus our patients can expertise water retention and doubtlessly gynecomastia (whereas Superdrol doesn’t cause this).
At OSUWMC, he had an initial ALT of 167, AST of eighty one, whole bilirubin of 21.eight, direct bilirubin of 13, ALP of 112, and an INR of 1.0. Patient’s social historical past included prior alcohol use varying from zero to 4 instances weekly with 4 to 10 drinks day by day, and tobacco use sometimes. While all prohormones may trigger unwanted aspect effects the best novices prohormone would he halodrol. If in search of prohormones which may be much less taxing on the body, strive non-methylated prohormones. 1-Androsterone and its metabolites are potent adrogens with sturdy androgenic effects subsequently the danger of gyno is almost never a difficulty.
On examination, he was muscular and bodily fit however deeply jaundiced. Laboratory testing showed a total serum bilirubin of fifty three mg/dL, but only modest elevations in serum aminotransferase and a normal alkaline phosphatase level (Table). He was treated symptomatically for pruritus with antihistamines, cholestyramine and ursodiol. Six months after the onset of jaundice, he was asymptomatic, had regained most of his weight loss (40 pounds), serum bilirubin was 1.5 mg/dL and serum enzymes had been normal. Given the precise fact you are taking a robust prohormone which is in a position to quickly enhance muscle mass, training quantity must be increased but we suggest limiting the increase in weights.
At Present accredited makes use of of androgenic steroids embody androgen deficiency, delayed puberty, breast cancer, postpartum breast engorgement, hereditary angioneurotic edema, endometriosis and fibrocystic breast disease. The androgenic steroids are also used off label and illegally as a method of accelerating muscle mass and athletic performance. The abuse of anabolic steroids is particularly widespread among body builders and younger male athletes, although their use has been banned from the Olympics and in main professional and college sports activities. Just Lately, anabolic steroids have been present in some dietary dietary supplements obtainable over-the-counter or via the web which are marketed as growing a way of wellbeing and muscle mass or as an assist to physique building. A rundown of the actions of individual prohormone products follows so this part shall only cover actions attributable to all courses of prohormone merchandise. This in itself could be an article in its own right so here is the shortened version. It is through these receptors that prohormone results are largely mediated, with other pathways of secondary significance.
500 mg/day of TUDCA should be taken to decrease liver damage, in addition to 4 g/day of fish oil to minimize giant spikes in blood stress. Because of its devastating effects on the liver, a 4-week Superdrol cycle is adequate for most bodybuilders. An aggressive PCT has been effective in restoring regular endogenous testosterone manufacturing in our patients. We have discovered Superdrol to have a robust, unfavorable effect on the hypothalamus-pituitary-gonad axis, successfully causing ASIH (anabolic steroid-induced hypogonadism). Our lipid profile exams have proven Superdrol to have dramatic effects on HDL and LDL levels of cholesterol, causing a sharp elevation in blood stress by way of vasoconstriction. Superdrol doesn’t trigger high levels of estrogen or progesterone in our testing, so gynecomastia isn’t a difficulty with this oral steroid. Therefore, a lean physique can proceed to look aesthetic and ripped, opposite to different bulking steroids, which regularly compromise muscle definition (with extracellular fluid accumulating).
M1TAlong with Nano Drol, M1T vies for the title of essentially the most potent prohormone ever developed. Launched in the early 2000’s it’s controversial that the progressive tendency within the USA to ban prohormones was a direct consequence of this compound particularly. 11-Ketotestosterone is a non-suppressive anabolic that should enhance your strength while supplying you with nice pumps.
The indictment additionally charges Braun, an owner of Blackstone Labs, and Singerman, a former firm owner, with two counts of introducing a product often identified as Super DMZ RX 2.zero, an unapproved new drug, into interstate commerce. The most punishment for the conspiracy to defraud is five years in jail and a fine of $250,000 or twice the gross acquire or loss from the offense. The most punishment for each of the 2 counts of introducing an unapproved new drug is three risks of using anabolic steroids and other performance-enhancing drugs (https://www.yojoe.com/include/incs/deca_durabolin_dosage__medical__for_beginners__intermediate_and_advanced.html) years in jail and a fantastic of $250,000 or twice the gross gain or loss from the offense. The scientists that covered this study specific their issues with designer steroid and prohormones bought labelled as «dietary supplements» and infrequently customers don’t comprehend the serious side effects that might expertise from use. The second ingredient is dymethazine – which is definitely a prohormone – changing to a stronger anabolic steroid after ingestion.
Information contained herein is not intended to be an alternative to professional medical recommendation. DigitalMuscle.com merges original programming; video sequence, articles, webcasts and a diverse content combine offered by insiders on the earth of diet, supplementation, training, bodybuilding and science. In my brief sabbatical from DigitalMuscle, I dipped into the hardcore, researching and experimenting with pro-hormones and andro-products. Dr. O’Connor has over 20 years of expertise treating men and women with a history of anabolic steroid, SARM, and PED use.
It Is advisable to start with a lower dose to allow your body to acclimate to the prohormones, particularly when considering the DMZ Prohormone Dosage. Assessing your tolerance is vital to a safe and effective prohormone cycle. I started with a modest dosage of DMZ, and as my cycle progressed, I steadily elevated the dosage. This approach repeatedly spurred muscle development and energy features, showcasing the significance of a well-regulated DMZ Prohormone Dosage in one’s bodybuilding journey. Dimethazine (DMZ) is indeed a powerful oral anabolic-androgenic steroid (AAS) with properties that have caught the attention of bodybuilders looking for fast will increase in muscle mass and energy.
But if you’d like most bioavailability (and who doesn’t?), then subcutaneous injections are the means in which to go – they’ve as a lot as 75% bioavailability in comparison with around 63% for IM injections. Steroids work by binding to androgen receptors in muscle cells, which triggers a cascade of biological processes. This interplay enhances protein synthesis, the method by which muscles restore and develop after stress, similar to intense workouts. Order tracking didn’t replace till about two days away from supply. We sincerely hope to give you a smoother expertise for your next orders. Your satisfaction with the standard of the objects and the discretion of the packaging is best way to get steroids, https://luxe.tv/wp-content/news/clenbuterol_helps_you_lose_weight.html, appreciated.
Made for powerful effects, these merchandise are excellent for reinforcing up muscle gain and enhancing athletic efficiency. With an emphasis on high quality and effectivity, our injectable steroids ship dependable results. Try RoidFarm’s premium injectable steroids designed to successfully and safely help your fitness targets.
Harris was also charged in this case and pleaded responsible to his role in the conspiracy on Sept. 17, 2024. If you’re in search of HGH for sale, be sure to purchase from a good source to ensure product quality and safety. Quick delivery and discreet supply choices can be found for individuals who wish to purchase HGH on-line within the USA. HGH injections are generally prescribed for children with development hormone deficiencies and adults who expertise decreased HGH production as a end result of pituitary issues or getting older. Synthetic HGH is broadly available on-line and has turn out to be a popular complement for improving muscle mass, growing strength, and enhancing bodily performance.
Our purchasers include amateur lifters, pro athletes, and competitive bodybuilders across North America, Europe, and Australia. The greatest PCT merchandise embody anti-estrogens like Clomid, Nolvadex, Arimidex, or Proviron and complement with Human Progress Hormones (HGH) like Beltropin or Human Chorionic Gonadotropin (HCG). The Drug Enforcement Administration (DEA) classifies AAS as Schedule III medication.
Potential advantages for the skin and hair are a prime priority right here. Fats loss can be extra easily achievable at this dose, with well-controlled unwanted facet effects for most girls. Low doses of HGH could be very effective for the new person or these just desirous to experience some advantages (like higher pores and skin, hair, recovery, and sleep) without going overboard. 2iu is a wonderful introduction to HGH and can permit you to evaluate the advantages and downsides.
All of this will result in critical health impacts and stress triggered to very important organs. Its primary function (as you’d anticipate from its name) is to promote growth. HGH is crucial in the early phases of life for the rising human. It was extracted from human cadavers within the earliest levels of HGH use.
Testosterone is a normally emerging intercourse hormone whose supply is a man’s testes. Restricted portions of testosterone are likewise delivered in a lady’s ovaries and adrenal framework. Testosterone Enanthate has also been generally identified as Testosterone Heptanoate. It is an anabolic and androgenic steroid (AAS) which is utilized to deal with the low testosterone ranges in men. It is additionally an important piece of hormone therapy for transgender males. Anabolic drugs are answerable for building muscles and androgenic alludes to the escalation of male sex traits.
But we should always weigh up HGH in comparability with an exciting investigational drug called MK-677 and some other peptides of curiosity. Trenbolone is perhaps the most advanced anabolic steroid one can use, so it also wants to be included in any advanced cycle with HGH. You can expertise these restoration benefits even at decrease doses because one of many core functions of HGH is to construct, repair, and keep muscle. Repairing muscle after train injury or harm is achievable amazingly properly by HGH, beyond what we see with anabolic steroids. Pharmahub is a distribution network for numerous pharmaceutical suppliers. Their inventory is unparalleled and so they provide specific offers that cannot be discovered on the person websites.
Still, when it comes to performance enhancement or bodybuilding, it isn’t legal to acquire or use with no prescription. In the US, HGH is not listed in the same way that anabolic steroids are, but it’s nonetheless banned to be used exterior medical settings and in competitors. Yes, one of the huge advantages of HGH is that women can use it with out the virilization that comes with using anabolic steroids. Women will get comparable benefits from HGH to males, however females will normally take a lower dose.
However you should nonetheless be made absolutely aware of any risks regardless of how little. ● Oily skin and pimples – easily treatable with good hygiene or products like Accutane. Anabolic steroids are broadly available in the United States, so anybody can simply get their arms on them. At Authorized Roids, our mission is to offer you the instruments to live your most lively lifestyle. It’s an understanding that who you’re at present isn’t the result.
In postmenopausal ladies, the remedy of osteoporosis with anabolic steroids, such as nandrolone decanoate, just isn’t advocated given the success of oestrogen replacement and, more just lately, with the introduction of the biphosphonates. In addition to their use as performance-enhancing drugs, steroids also have legitimate medical applications. They are sometimes prescribed to treat conditions corresponding to low testosterone, muscle losing ailments, and certain types of anemia. The prevalence of medical steroid utilization in Quintana Roo, Mexico, is likely similar to that of other areas in the country.
To reveal how this downside could also be addressed, Thevis et al. (2005) developed an LC–MS/MS screening method based mostly on common fragmentation pathways and Nielen et al. (2006) used a mixture of androgen bioassay detection and electrospray quadrupole time-of-flight mass spectometric identification. Anabolic steroid use occurs among adolescents, particularly by those taking part in aggressive sports activities. It has been advised that the prevalence of use amongst high-school students in the united states could additionally be as high as 2.7%.[21] Male college students used anabolic steroids more regularly than female college students and, on common, those that participated in sports activities used steroids extra typically than those that did Arnold use steroids (https://leristrutturazioni.it/art/acquistare_clenbuterolo_1.html) not. In Querétaro, as well as the the rest of Mexico, the sale and possession of steroids are regulated by the Ley Common de Salud (General Well Being Law).
In conclusion, while it may be potential to purchase testosterone in Mexico and not utilizing a prescription, it’s crucial to abide by the laws and rules of the nation. Engaging in the unlawful purchase or importation of testosterone just isn’t beneficial, as it could possibly have legal consequences and pose potential well being dangers. It is at all times greatest to consult with a professional healthcare skilled to determine the appropriate course of action for hormone substitute therapy.
Testosterone is a managed substance in Mexico and may solely be obtained with a prescription from a licensed Mexican doctor. This article will outline the mandatory steps and necessities for buying testosterone in Mexico. These steroids are widely used by athletes and bodybuilders to enhance their performance, improve muscle mass, and improve their general physique.
The IOC, however, is responsible for organizing and overseeing the Olympic Games. The IOC additionally works closely with WADA to guarantee that athletes who compete in the Olympics adjust to anti-doping laws. The IOC has a zero-tolerance coverage in the direction of doping and works with nationwide anti-doping organizations to implement anti-doping rules [37]. In addition to WADA and the IOC, there are additionally nationwide anti-doping agencies (NADAs) answerable for enforcing anti-doping regulations on the national degree. These agencies work with WADA and the IOC to implement anti-doping applications and insurance policies [38]. The role of regulatory businesses in bodybuilding is important, because it ensures that athletes compete on a degree taking part in subject and that their well being and safety are protected. Nevertheless, the effectiveness of present rules and enforcement efforts has been questioned, and there are considerations about the widespread use of performance-enhancing substances in bodybuilding regardless of anti-doping laws.
It Is type of humorous when you suppose about it; an ultimate free market endeavor was selling to what is supposed to be the last word free market on earth; things that make you go hmm. If you want to enhance testosterone, libido, better temper, and general enhance your men’s well being, right here is the most effective place to Purchase enclomiphene citrate online! It was detected in two urine samples from an athlete (August 2001, March 2002) by Catlin et al. (2002). A US Government Investigation revealed that a chemist based in Champaign (IL, USA) synthesized this steroid and it was distributed by an organization known as BALCO Laboratories (see additionally the part ‘Designer steroids’). Customs officers will generally want a letter from the person (patient) stating that the drug from a Mexican pharmacy is intended for personal use to deal with a severe medical condition.
Nonetheless, it is necessary for individuals to consult with a licensed medical skilled earlier than using steroids for any objective. Medical steroid use in Jalisco, Mexico, is relatively common, as these substances could be prescribed for a variety of well being circumstances, together with hormone imbalances, muscle losing ailments, and inflammatory situations. However, it is necessary to do not overlook that these prescriptions are strictly regulated and may solely be used under the supervision of a licensed medical professional. Mexican pharmacies are recognized for his or her more relaxed regulations in terms of certain drugs, together with testosterone. Nevertheless, it could be very important note that buying without a prescription may be illegal and should result in serious penalties. It is all the time greatest to seek the advice of with a healthcare professional earlier than contemplating testosterone therapy. Not Like in different nations the place the sale and use of these substances are extremely regulated or outright unlawful, Mexican legal guidelines are more lenient.
In skeletal muscle, 5α-reductase exercise is negligible and, subsequently, the parent steroid itself binds with strong affinity to the androgen receptor. It follows that there’s a favourable disassociation of the myotrophic results from the androgenic results of nandrolone and also that there’s a higher myotrophic-to-androgenic ratio in comparison with testosterone. The pancreas produces it, and its main perform is to help cells in the physique take up glucose from the bloodstream, which is then used for energy. In bodybuilding, insulin is usually used as a performance-enhancing substance due to its anabolic results. Insulin stimulates the uptake of amino acids and glucose into muscle cells, selling muscle progress and repair [16].
This is a developing subject and the comparative importance of many of these coregulators is yet to be established for any explicit cell type, let alone their relative in vivo importance in analyzing tissue differences in androgen motion. It is envisaged that genetic manipulation of the mouse will help in elucidating their physiological relevance. In goal tissues where intracellular enzymes are present, the motion of testosterone is mediated by metabolism. Testosterone is irreversibly transformed by the enzyme 5α-reductase to 5α-dihydrotestosterone (DHT), which binds with greater affinity to the androgen receptor (AR), or by aromatase to oestradiol, which binds to the oestrogen receptor (ER). Testosterone and DHT can be additionally converted to weaker androgens (not displayed), once more being dependent on whether or not the goal tissue has the required enzyme exercise, e.g., 3α-hydroxysteroid dehydrogenase, 17β-hydroxysteroid dehydrogenase.
To date, research means that GHS will increase the discharge of HGH or IGF-1 in people. Nevertheless, few research have investigated whether taking GHS really leads to significant modifications in physique composition, train performance, or recovery (10). Peptides exist naturally in your body, but you can even discover them in animal or plant sources of protein, including meat, fish, dairy, eggs, beans, lentils, and whole grains. Manufacturers can isolate these peptides or make them by combining individual amino acids (2, 3). Peptides, including GHSs, are brief chains of amino acids, that are little molecules which are the constructing blocks of peptides and proteins.
It is important to do your research and be certain to are purchasing from a reputable supply to keep away from scams or harmful products. We evaluated the popularity of each complement’s manufacturer to ensure they’ve a historical past of producing high-quality supplements. We only recommend authorized steroids from respected producers with a confirmed monitor document. We thought-about the feedback and evaluations from prospects to gauge the authorized steroids.
Thus, commonly used compounds like Testosterone, Dianabol, and Trenbolone aren’t beneficial for female use. Typically, Clenbuterol is mixed with different slicing steroids like Anavar or Winstrol to enhance fats loss. Winstrol, also recognized as Stanozolol, tends to be much less appropriate for women because of its strong tendency to bind with SHBG (Sex Hormone-Binding Globulin), which may result in masculinization symptoms. Nevertheless, our analysis indicates that it can be safely used in minimal doses. Whereas Winstrol successfully builds muscle in girls, its efficiency signifies that even small quantities are impactful. We have determined that a daily dose of 5 mg is typically protected and minimizes the danger of virilization.
This is as a outcome of orals are C-17 alpha-alkylated, which means they’re processed by the liver earlier than getting into the bloodstream. Consequently, the organ turns into confused, with ALT and AST liver enzymes rising. Interestingly, there might be analysis exhibiting that oral testosterone improves cardiovascular health when therapeutic doses are administered to overweight males (3). However, we hypothesize reductions in fats mass to be the first think about subjects reducing BP. AASs journey via the bloodstream to the muscle tissue, the place they bind to an androgen receptor. The drug can subsequently work together with the cell’s DNA and stimulate the protein synthesis process that promotes cell development.
D-Bal Max helps increase nitrogen retention, which permits muscle tissue to retain extra protein, finally resulting in sooner muscle progress and recovery. This course of additionally helps stop muscle breakdown, so you can build lean muscle more successfully. The CrazyBulk Final Stack is the head of legal steroid options. With its comprehensive approach to muscle progress, fats loss, power, and recovery, it’s the last word answer for anybody who’s severe about remodeling their physique. When it comes to reworking your physique, the CrazyBulk Final Stack is the last word solution for critical lifters. This powerhouse stack includes every little thing you want for bulking, slicing, energy positive aspects, and fast recovery—all in a single convenient bundle.
This means you can practice tougher, more typically, and with less threat of overtraining. They also enhance lean physique mass, giving athletes a stronger, extra powerful physique that doesn’t weigh them down. Many flip to an injectable steroid for constant, longer-lasting outcomes that assist them stay in peak situation.
Secondly, testosterone doesn’t cross through the liver, thus failing to stimulate hepatic lipase, an enzyme that may skew cholesterol levels within the wrong path. There are a couple of the reason why testosterone doesn’t negatively affect blood stress significantly. Firstly, it converts to estrogen, with the female hormone having a optimistic effect on blood lipids. When injected within the right dosages, we find testosterone to be one of the most secure steroids out there. Testosterone is an FDA-approved https://bodegascrial.es/pags/?trembolona_comprar_2.html steroid used to treat tens of millions of males throughout the world who are poor in pure testosterone.
Bear In Mind, endurance and perseverance are key in relation to body transformation. Keep constant along with your efforts, and do not let the ‘fast repair’ of steroids derail your long-term well being targets. With the proper method, you’re all set to build the strong, healthy body you aspire to. We’ve unpacked the world of steroids and provided practical steps to muscle gain without endangering your well being. Now, it is in your palms to make informed decisions and take a sustainable method in course of fitness. The purpose is that IFBB pros today are taking heavy dosages of very androgenic compounds.
Indeed, oral steroids facilitate an setting conducive to performance positive aspects. However, it is crucial to acknowledge the dangers and to make use of these substances responsibly and beneath medical guidance. Monitoring for undesirable unwanted effects is essential, as is guaranteeing the quality of the products used. Exploring secure and authorized steroid alternatives can also be a prudent approach for long-term well being and athletic development. Moreover, they provide outstanding bulking and chopping outcomes without any concern of unwanted effects. Thus, legal steroids are a safer alternative to anabolic steroids and promise comparable benefits with no main dangers. With the right legal steroid, people can achieve their muscle progress goals safely and effectively.
Snacking on a handful of almonds can give you a dose of plant-based steroids. You can sprinkle them in your cereal, yogurt, or smoothies to enjoy their nutty taste and health benefits. In conclusion, whereas plant-based steroids supply potential benefits, it’s crucial to listen to the potential health issues and to use them responsibly. Consulting with a healthcare professional and understanding their limitations might help individuals make informed selections about incorporating plant-based steroids into their life-style. Proper schooling and understanding of their benefits and limitations are crucial to avoid misconceptions and promote accountable use.
You can add resistance to this train by holding a dumbbell between your toes. A modified model of this exercise would be performing captain’s chair hanging leg raises. If you have any questions or want additional clarification about this news, please leave a comment under, and Aiman will get back to you as quickly as possible. Someone like myself who oversaturated the receptors and didn’t come off them, meant my physique actually needed more to truly get outcomes. By not lowering my doses for thus lengthy, I needed to keep increasing my doses at one level because if I didn’t, I wouldn’t have made any progress.
As a result, Jay Cutler competed within the 2013 Mr. Olympia match for the ultimate time. Regardless Of not winning, he cemented his place among the many legends. He mentioned his last farewell to the bodybuilding sport as an icon after this competition. Jay has raised to the ranks of the bodybuilding elite’s grassroots because of his dedication. Despite this, he remains humble, approachable, and straightforward, utilizing his celebrity and fortune to help others in attaining their goals. That is why different builders look to Jay Cutler as their role model.
At the beginning of the 12 months, the bodybuilding legend shared that he could be going through a «Fit-For-50» transformation course of. Now, he’s halfway via the process and wanting out as shredded as ever. Milos, talking from personal expertise, admitted that even with moderate drug use, he confronted health repercussions that persist to this day. Gut points, inflammation, and adrenal problems are just some of the long-term consequences he continues to battle. His candid confession serves as a cautionary story for others who could also be tempted to follow within the footsteps of maximum bodybuilders. Days after the viral picture circulated on-line, Cutler shot down a potential bodybuilding return. Even although he sported a shredded construct, he mentioned he was remodeling his physique as part of a match for 50 problem.
Cutler’s commitment to his craft made him incredibly difficult to contend with on stage. Whether Or Not it was consuming 140 egg whites a day, or adhering to a strict cycle, «The Comeback Kid» never minimize corners to maintain up one of the best physiques the game has ever seen. While Cutler has hung up his posing trunks for good, he stays a sage voice for the bodybuilding group and his knowledge surrounding the sport is second to none. Jay sustained a severe biceps damage in 2011, limiting his capacity to compete professionally as a bodybuilder.
Now I wake up this morning and I feel, that was at two, so I probably laid again down it was three. Cutler mentioned that testosterone clinics didn’t exist throughout his prime. He said biking on and off medication was ‘very common’ and that it always ‘worked well’ for him. You’re not just going to alter compounds and get absolutely shredded,» says Cutler. Throughout the 2000s, he cemented himself as an all-time nice, profitable a total of four Sandow trophies. In 2006, he dethroned eight-time winner Ronnie Coleman, ending the ‘The King’s’ long-standing reign.
If everyone may then stepping into monstrous situation wouldn’t be that big of a deal. Jay Culter shaped a fierce rivalry with 8x Mr. Olympia Ronnie Coleman—whom he just lately joined forces to undergo a demanding again and biceps workout—and won Olympia in 2006, 2007, 2009, and 2010. Cutler has fortuitously remained comparatively wholesome after his retirement.
It takes hard work and dedication and even if medication do play a task you’ll never get around the fact that training and food plan are important to seeing modifications in your physique. This isn’t the first time that Cutler has detailed his diet at forty nine years old. He recently took half in a JayCutler TV look the place he opened up about preserving the metabolism guessing. He supplied options for bulking with out having to add a substantial quantity of size. In a Cutler Solid Podcast final yr, the Massachusetts native revealed that he favors ‘lean bulking’ over soiled bulking. At the time, Cutler wasn’t obsessive about muscle mass but emphasised that most individuals nowadays aspire to keep leaner physiques.
Knowledge and proper healthcare guidance are essential for athletes. They ensure safety within the journey to the top of aggressive bodybuilding. Jay Cutler, a reputation identified on the planet of competitive bodybuilding, took a considerate method to steroids for bodybuilding side effects (https://autoscuolagatti.it/art/acquistare_testosterone_1.html). From 2000 to 2005, he shared details of his routine, catching the fitness group’s curiosity. His cycle included Equipoise and Propionate, changing every 4 weeks as an alternative of using Enanthate. Hi, I Am Dave Moffat the founder and Chief Editor of steroidsourcetalk.com and licensed Worldwide Private Trainer and Licensed Nutritionist.
You might know him because the «Golden Eagle» or «The Quad Father» because of his huge legs and splendid appearance. He was some of the well-known bodybuilders during the Seventies and Nineteen Eighties and took part in Mr. Olympia a quantity of occasions, going up in opposition to the legend like Arnold Schwarzenegger, al… In addition to monitoring his diet in a diary, Cutler has been forthcoming about his supplement and steroid use however solely in retirement.
Nevertheless, it’s essential to talk with a healthcare professional earlier than taking any dietary supplements, as they’ll work together with drugs and have adverse unwanted facet effects. Steroids can affect physique composition in a number of methods, together with growing muscle mass and power, but also resulting in adjustments in body fats distribution. Some steroids, such as anavar, can enhance muscle mass and power, while others, such as dianabol, can improve physique fat. Nevertheless, these modifications in body composition are often accompanied by unfavorable well being consequences, including liver harm and hormonal imbalances. Moreover, when steroids are stopped, the physique might experience a rebound impact, leading to fast weight gain.
Within one minute, shortness of breath was skilled due to oil in the bloodstream. IV injections are utilized in medical situations, undertaken in hospitals underneath strict hygiene circumstances, and carried out by medical professionals. Some illicit recreational drug customers also use this type of injection. Since you have to use new sterile tools for each injection, you’ll find a way to undergo many gadgets in a long cycle. Shopping For in bulk will prevent money and guarantee you’ll not have to fret about working out pros and cons of steroid use — https://goldfieldstvet.edu.za/pags/the_best_1303.html — being tempted to reuse gadgets, risking your well being. Injecting steroids for the very first time is a frightening task for almost anybody who has carried out it.
Dianabol has a very negative impact on cholesterol, potentially causing atherosclerosis. The major causes of Dianabol’s cardiotoxicity are water retention and the stimulation of the hepatic lipase enzyme within the liver. Dianabol will increase aromatization and thus has excessive estrogenic exercise. Consequently, water retention and gynecomastia are possible side effects. Dianabol is a toxic oral steroid; thus, it frequently has undesirable effects on liver values, aspartate aminotransferase (AST), and alanine aminotransferase (ALT).
You should also aim to consume a enough quantity of protein to assist muscle development and restoration. Nonetheless, so as to obtain those essential muscle features, your physique needs to level up its fat-burning capability. If you’re looking for an oral legal steroid that can construct dry, dense muscle, strip away fats, and enhance uncooked power, Trenorol is your top-tier decide.
Several MMA fighters, sprinters, baseball gamers, Olympic athletes, and others have been found to have the above substances of their systems. Steroids assist restoration as a end result of their stimulation of IGF-1 levels, a potent wound-healing agent (2). Gynectrol has been specifically formulated to naturally melt away unwanted chest fat. From my expertise I know that Crazy Bulk dietary supplements work very properly. However, there are means to get similar outcomes without risking your well being. A Quantity Of other athletes have been caught utilizing the Winstrol because of the bodily performance increase it supplies.
Winstrol may also increase liver enzymes notably, so shorter cycles are commonly applied (not beyond 6–8 weeks). A few of our feminine sufferers have noticed their menstrual cycles becoming irregular, particularly on higher doses and towards the end of their cycle. Women who take Anavar don’t usually experience masculinization beneath our care. Nonetheless, virilization is feasible in giant doses or extreme cycles. Steroid use can significantly cut back sperm production, resulting in short-term or, in some instances, permanent infertility.
Still, as all the time, you must be open to experimenting with different dosages and decreasing it if required – depending on your tolerance of unwanted effects. It’s undoubtedly the preferred anabolic steroid with female athletes of various types. As all the time, there are numerous ways you can put collectively a short 2 to 3-week cycle, so these are just a few examples.
Not all males will experience increased aggressiveness, and analysis has proven that solely a tiny % of them notice this aspect effect. A 50 to 100mg per week is appropriate for many females to enjoy the benefits while decreasing the negatives to a minimal or non-existent stage. A cycle of 6 weeks at a bare minimum is required to get probably the most from Equipoise due to its slow-acting nature. However you ought to use this steroid as much as weeks at low doses – hold look forward to these virilizing signs over that length of time, significantly if you’re taking a dosage at the higher finish of the vary above.
It is important that you have got a clear understanding of the explanations in your choice to utilize these supplements. If you wish to improve the way you seem on the skin and get more definition in your muscles, then you should consider using certainly one of these supplements. If you begin utilizing these things earlier than and all through your workout routines, you might notice important enhancements in your performance. Customers have experienced enhanced energy levels, weight discount, and better exercise performance. Consult your healthcare doctor earlier than starting this anabolic steroid various if you’re breastfeeding, pregnant or have any medical conditions.
In addition to controlling fluid retention, you must consume roughly 4,seven hundred milligrams of potassium per day to find a way to stay healthy. Potassium additionally helps with fluid flush by lowering sodium ranges and growing urine manufacturing. Moreover, lean protein might help patients shed weight whereas on prednisone. Steroids consumed for weight loss purposes are often recognized as cutting agents, in distinction to bulking agents (used for rising the lean body weight and general muscle mass).
When anadrol is used at doses above 100mg a day or for prolonged periods of time, the potential for everlasting liver injury does exist. The dangers of this steroid enhance when it’s mixed with other oral steroids and/or alcohol. The low dose of testosterone helps protect lean muscle mass and maintains total hormonal stability. With the best anabolic steroid stack, bodybuilders and athletes can attain their goals faster, pushing previous plateaus in both size and energy. Anabolic androgenic steroids https://www.hlsports.de/wp-content/pages/?abnehmen_tabletten.html synthetic versions of testosterone, the hormone that drives muscle growth, power, and general bodily performance.
Equally, it is certainly one of the most compromising cycles when it comes to unwanted effects. An effective dose for women seeking to construct muscle is 12.5–25 mg per day for 4-6 weeks. However, we discover it to be estrogenic in real-life settings, having the potential to cause gynecomastia, water retention, and bloating. Usually, the better the outcomes skilled from a steroid, the extra serious the unwanted effects are.
An injectable steroidthat dates again to the Nineteen Seventies and is regularly combined with testosterone. It’s a kind of oralantioestrogen drug that’s most usually used to deal with sure types of breastcancer. Non-medical use of steroids can contain quantities from 10 to one hundred occasions the quantity used for medical functions.
Legal steroids, also called steroid options, are compounds formulated by supplement corporations to imitate the constructive results of anabolic steroids however without the harsh unwanted effects. We generally see Deca Durabolin shutting down endogenous testosterone ranges, causing low testosterone symptoms, and requiring a PCT to convey this male hormone back to regular ranges. Deca Durabolin is considered one of the mildest anabolic steroids in our experience; therefore, why it’s FDA-approved and widely utilized in drugs (similar to testosterone). 5a-reductase inhibitors can reduce the scale of the prostate by 20–30% (2); nevertheless, decreased fat loss and muscle constructing may happen, with DHT being a extremely anabolic hormone. Testosterone causes aromatization; thus, high levels of testosterone are transformed into estrogen.
Dianabol is a fast-acting oral anabolic steroid that grew to become well-liked within the Nineteen Sixties and stays a go-to bulking agent. It enhances nitrogen retention and protein synthesis, leading to fast strength and mass positive aspects (Llewellyn, Anabolics, 2017). Nonetheless, it additionally causes vital water retention and will lead to gynecomastia without the utilization of aromatase inhibitors. Its hepatotoxic nature requires cycles to be saved short (de Ronde & Smit, NEJM, 2005). Winstrol is extremely effective for enhancing strength, velocity, and vascularity without extreme water retention.
If you might be new to steroids, then it is important to start with a lower dose to see how your body reacts. Once you might have determined that you tolerate the drug nicely, you possibly can increase the dosage. Over the previous few years, bodybuilders and athletes have more and more turned to Anadrol to assist them bulk up and increase their energy. Anadrol (also known as Oxymetholone) is a synthetic anabolic steroid that was first developed in the 1960s. Derived from dihydrotestosterone and was initially used to deal with anemia and muscle losing issues. Also, if you’re affected by insomnia, completing your workout earlier within the day might help, as weight coaching stimulates the nervous system and increases adrenaline ranges earlier than mattress.
However, we find that if a person opts to use a lighter steroid following Anadrol, this will delay the time it takes for endogenous testosterone levels to recover. Thus, it’s only sometimes applied by people who’ve low well-being post-cycle. As Anadrol is a bulking steroid, customers are prone to mix it with a high-calorie food plan, leading to fats achieve and extra water retention.
That ought to give you an thought of its efficiency in a significant portion of the population. Still, let’s not idiot ourselves, as the high-dose use of testosterone suspension can indeed produce some dramatic strength positive aspects over a short period of time. Whereas every form of testosterone is a formidable strength-booster, suspension tends to supply these increases more quickly, giving it the sting over other types of the drug. A well-rounded steroid, testosterone produces its energy positive aspects by way of quite lots of mechanisms, quite than only a single, main pathway, as is the case with a quantity of AAS..
Anabolics mimic the motion of male sex hormones like testosterone and dihydrotestosterone. By accelerating protein synthesis throughout the cells, steroids result in hypertrophy of muscle tissue — a process called anabolism. As a result, after a period of steroids, it is required to undertake specific therapy to get well male hormone production and ensure common bodily functioning. SARMs and anti-estrogen products that lower the danger of antagonistic results could additionally be discovered in this a part of our retailer. These dietary supplements are made using natural, premium ingredients which are clinically examined and proven to offer muscle development and strength. They do not pose any danger to your short-term or long-term health, making them a game-changer for bodybuilders and athletes alike.
Be it a physician, pharmacist, or authorized expert—obtaining knowledgeable and customized recommendation is at all times the safest path in phrases of coping with regulated substances like steroids. While shortcuts might seem attractive, they almost all the time lead to unsafe and unlawful territory. Within the realm of anabolic steroids, there are many that are categorized as controlled substances within the UK. This means their use, possession, or sale with no legitimate prescription or license can result in authorized consequences. The categorization and legality depend upon the sort of steroid and its potential for abuse. With our user-friendly platform, secure checkout, and quick shipping, we make it simple to buy steroids on-line within the UK. Trust one of the best steroid suppliers UK for actual results and unmatched quality.
These dietary supplements are made from one hundred pc pure ingredients, and they work with none side effects. These are supplements that are produced from 100% pure elements and that work without any unwanted effects. Testosterone is liable for the development of masculine characteristics corresponding to elevated muscle mass, deep voice, and body hair.
Our online pharmacy’s success and recognition are greatest measured by clients’ evaluations. They could be discovered within the website’s discussion board in addition to on different well-known websites. For over 6 years, we’ve efficiently delivered orders all through Ireland, the United Kingdom, Europe, and the rest of the world.
«The real progress has are available young users who wish to enhance their body picture.» The BBC has spoken to folks as young as 19 who say taking the merchandise harmed their bodily and mental health. A Quantity Of individuals, nevertheless, discover it difficult to develop energy quickly since their our bodies naturally battle this procedure. When creating a steroid cycle, it is important to choose on an AAS that is applicable for the duties at hand. Remember that each steroid, to variable degrees, has androgenic action. Moreover, as a outcome of injectable medication do not cross via the gastrointestinal tract, their bioavailability index is exceptionally excessive.
They haveactive elements that inhibit the physique’s regular production of testosterone,and in consequence, they cut back testosterone ranges. To combat this, medicalprofessionals advocate the use of drugs that control levels of progestin andestradiol. However, there are times when the production of testosterone isstill too sluggish. Steroids can alter hormone levels, something many inexperienced athletes are unaware of. The remedies include active substances that inhibit the body’s natural testosterone manufacturing. Injectable steroids are the most effective method to improve your efficiency within the health club and get the body of your goals. In our online shop, you can find anabolic steroids and oral steroids from respected pharmaceutical producers who’ve been engaged in sports pharmacology research for fairly a very long time.
These are the bodybuilding and performance-enhancing medicine (PEDs) that you’re probably more conversant in. Anabolic steroids have a smaller medicinal utility, largely revolving around hormone alternative therapy for conditions like delayed puberty and muscle loss because of diseases. If you’re on the lookout for authorized steroid options within the UK, we provide premium formulations which are secure and effective. A hugely anabolic and androgenic oral steroid commonly used or treating muscle-wasting ailments similar to AIDS. While it will get outcomes fast, it’s also the most likely to make you go bald and provide you with pimples. Less toxic on the liver than stanozolol but will cause your blood stress to skyrocket. Bodybuilders may now buy anabolic steroids on-line and reap the benefits that these specialized medicines present, because of the evolution of the web.
Testo-Max’s elements embrace D-Aspartic Acid, Magnesium,(7) Zinc(8) and Vitamin D3,(9) all of which have been shown to boost testosterone ranges. It is good for anyone looking to increase their energy and power throughout intense exercises. D-Bal is a authorized efficiency enhancer that encourages the utilization of a pure food regimen and regular exercise for spectacular outcomes. Anabolic steroids usually are not presently accepted for medical use in remedy here, so it’s illegal to prescribe them. There are a couple of various varieties of authorized steroid alternatives out there within the UK. If you would possibly be addicted to anabolic steroids, you’ll doubtless need professional help to overcome the habit. This is why it’s necessary to pay attention to the potential for dependancy before you resolve to take anabolic steroids.
Amongst the products Buy Steroids On-line at RoidsRUs, there is a completeness that includes powder and injections that go properly with one’s necessities and personal emotions. Be it increasing your muscle mass, shredding fat, enhancing performance, or focusing on general well-being, our vary of dietary supplements is designed to cater to your particular needs. This selection range consists of top-grade steroids produced by trusted manufacturers which we routinely test to a purity and power test limit. Anabolic steroids are prescription-only medicines which might be sometimes taken without medical recommendation to extend muscle mass and improve athletic efficiency. Oral steroids can be highly effective for muscle development, power, and medical use, however they also include risks. Whether Or Not you’re a beginner or an experienced bodybuilder, choosing the proper oral steroid on your goals is key. In summary, legal steroids are a secure and efficient different where to get steroids bodybuilding [https://www.healthyfy.com/pgs/appetite_suppressants_1.html] anabolic steroids.
Prior to using Anavar, it’s critical to seek the guidance of with a healthcare skilled or experienced health advisor who can provide guidance, monitor your health, and assist minimize potential risks. In this section, we are going to provide a complete overview of an Anavar instance cycle, which serves as a roadmap for people considering using this in style anabolic steroid. Anavar cycles are fastidiously deliberate durations of time during which the steroid is taken, with particular dosages and durations in thoughts. Lastly, Anavar binds to androgen receptors in the physique, triggering specific mobile responses. This activation may find yourself in elevated muscle energy, improved restoration, and enhanced athletic performance overall. If you want to push past obstacles and really feel you’ve reached a brick wall with your progress, HGH can get you previous that point and on to experience outcomes that aren’t otherwise potential solely with steroids. Correct testing for HGH in athletes isn’t as straightforward as detecting most anabolic steroids or different PEDs, and urine testing can not be used to detect HGH.
It’s known that higher-weight individuals have a lowered output of progress hormone and that development hormone plays a critical function in lowering and redistributing body fat[1]. HGH is called Somatotropin, a peptide hormone naturally produced in our physique. As you might guess from its name, development hormone is crucial for its positive effects of anabolic steroids (http://autoworld.com.my/dist/articles/index.php?trenbolone_tren_anabolic_steroid.html) on development. However there’s much more to HGH than that… HGH is a complex hormone; once you perceive its major capabilities and results, you probably can see what makes it appealing to bodybuilders and athletes. You should have common appointments along with your healthcare provider when taking an anabolic steroid to evaluate how well it’s working. For athletes, increasing muscle mass can also promote energy, which might improve strength-based sports activities efficiency. Healthcare providers present corticosteroids much more often than anabolic steroids.
HGH is legally used in drugs to treat some situations referring to development. Still, in phrases of efficiency enhancement or bodybuilding, it isn’t legal to acquire or use with no prescription. In the US, HGH is not listed in the same method that anabolic steroids are, but it’s nonetheless banned for use outdoors medical settings and in competition. Somatotropin is a human growth hormone used to treat some medical circumstances, and it’s also popular with bodybuilders. However it comes with unwanted aspect effects, and despite the precise fact that it’s not a steroid and the HGH unwanted effects are largely not of the identical nature that we get with anabolic steroids, synthetic HGH for bodybuilding functions is a dangerous alternative. HGH-X2 is a authorized and secure different to Somatropin, a human growth hormone (HGH) kind.
Without the help of anabolics, trendy athletes and health fanatics who want to have a wonderful physique sometimes collapse making an attempt to raise oversized masses throughout training. The use of anabolic steroids is extremely regulated in most nations, including the Usa. These substances are categorized as Schedule III controlled substances under the Anabolic Steroid Management Act, and their possession or distribution with no prescription is illegal. For the male performance enhancing athlete, a 20-30mg per day dosing will present athletic enhancement, but most will discover 40-50mg per day to be much more efficient. 80mg per day is not unusual, however it will enhance the chance of unwanted side effects. Of the potential unwanted effects of Anavar essentially the most regarding will encompass cholesterol. The Oxandrolone hormone is well-known for suppressing HDL ldl cholesterol, as well as growing LDL ldl cholesterol.
Welcome to Arnold Anabolics, your premier destination for top-quality anabolic steroid dietary supplements designed to elevate your fitness journey. In conclusion, when contemplating the decision to purchase Anavar, it is essential to strategy it with warning, accountability, and correct analysis. Anavar can supply vital advantages such as increased muscle mass, improved strength, and enhanced athletic performance.
At Physsportsmed, measures are strictly adopted, so we don’t sell these restricted objects. However, one must all the time affirm the native legal guidelines and regulations concerning the acquisition steroids to keep away from breaking any set guidelines. Making Certain one is updated on the actual authorized steroids on the market in a particular jurisdiction is important.
Nonetheless, one ought to concentrate on potential privacy considerations when buying on-line. At Enongvet Treatment, we provide a safe platform for the convenience of our clients. When you buy Ganabol from our web site, you possibly can rest assured that your personal information is not shared with anyone. We have strong encryption and data security solutions in place to protect your privacy. Furthermore, we ship your objects discreetly in sealed bins with no shipping labels.
Strategic stacking with reasonable, complementary dosing usually leads to superior body composition changes with fewer complications. Carried Out wrong, stacking can wreck your hormones, tank your lipids, and leave you chasing diminishing returns. It may help you unlock probably the most environment friendly, efficient, and sustainable physique transformations attainable — with a decrease danger of long-term injury. Big Diet is the place I buy 100% of my authorized steroids and I’m snug recommending them to anyone that desires to jump headfirst into this motion themselves.
At its core, steroid stacking is about combining two or extra anabolic compounds to reinforce results by way of synergy — not excess. Every compound has unique strengths, half-lives, side effects, and mechanisms of action. When stacked properly, these compounds amplify every other’s advantages while helping to offset individual weaknesses.
Peptides assist to decrease blood pressure and enhance collagen, which in turn helps to enhance muscle connectivity and total energy. Steroide.Authorized is the one trusted supplier of genuine steroids with discreet supply and personal cost methods. Decrease doses are really helpful to develop tolerance and decide the body’s response to the treatment.
Take your workouts to new heights, optimize your results, and redefine your limits with Arnold Anabolics — the place excellence meets innovation on the earth of health supplementation. For more info concerning the risks of steroid abuse, please visit and Referred To As Operation Cyber Juice, the nationwide enforcement effort, which concerned greater than 30 U.S. investigations in 20 states, resulted in ninety arrests. Moreover, investigators seized 16 underground steroid labs; 134,000 doses of steroids; 636 kilograms of raw steroid powder; eight,200 liters of uncooked steroid injectable liquid; and greater than $2 million in cash and assets. The Drug Enforcement Administration (DEA) classifies AAS as Schedule III drugs. Simply possessing them illegally (not prescribed to you by a doctor) can lead to up to a 12 months in jail and a fine of a minimal of $1,000 for a first-time offense. Info pertaining to the most effective muscle constructing dietary supplements presently on the market.
When buying steroids, it is vital to prioritize safety to protect both your health and financial funding. Confirm merchandise include clear labeling and instructions for secure dosage. It is essential to know steroid cycles, as these dictate how to use steroids successfully whereas minimizing risks. Seek The Assistance Of healthcare professionals who can present steering on safe usage and potential unwanted facet effects.
All of this could result in severe health impacts and stress caused to very important organs. It’s important to remember that pain in the joints while using HGH in the early levels isn’t an indication that the joints are damaged however is a aspect impact of the repair and progress course of that HGH is stimulating. Joint pain from HGH use is normally a short-term facet effect within the earliest phases of using it and, in most cases, will disappear shortly as the growth and calcification course of completes. When a excessive dosage of HGH is abruptly taken, joint ache could be more extreme.
Anavar’s low androgenic properties make it much less prone to cause virilization, a set of masculinizing unwanted aspect effects. This attribute is particularly appealing for feminine athletes who want to avoid the event of masculine options similar to deepening of the voice, excessive hair growth, or clitoral enlargement. HGH is mostly thought of less risky than most anabolic steroids, with much less chance of extreme unwanted facet effects.
The bottle stopper is securely fixed, and therefore it can’t be opened by hand. The expiration date and batch quantity are always printed in a definite font from the the rest of the inscriptions, and a separate print for the date of manufacture. In addition, the unique steroids are packaged in large bottles and sealed in a plastic movie. Anabolic steroids in tiny bottles are offered in packing containers of one bottle each.In certain situations, the writing on a counterfeit bottle doesn’t match its contents. In the best-case scenario, the drugs is neutral (placebo); within the worst-case scenario, it consists of the lively ingredient but not within the quantity that’s specified on the label. This is very dangerous to girls who use excessive levels of steroids, which is extraordinarily undesirable. Several athletes within the Usa have died because of blood poisoning after using bogus medicines.
There are quite a few resources obtainable to offer help and steering throughout the recovery process. Think About talking with a healthcare professional, such as a physician or therapist, who can help in creating a personalised remedy plan. It is important to note that the authorized panorama surrounding AAS is constantly evolving, with regulatory bodies continuously monitoring and adapting their insurance policies to deal with emerging developments and challenges. The fight towards AAS abuse requires a complete strategy that combines legal measures, education, and help for people struggling with substance abuse. Internationally, the World Anti-Doping Company (WADA) has established anti-doping regulations to prevent the use of AAS and different performance-enhancing drugs in sports.
Based Mostly modes of administration, injection segment within the anabolic steroids market is anticipated to carry 45% List of androgens (https://cuisine.at/ajax/pages/index.php?comprar_hgh_3.html) the revenue share by 2037. Globally, the Statistic Brain Analysis Institute estimates that 50 million folks have been diagnosed with arthritis. The global market for steroid injections is also being driven by elements corresponding to growing demand for steroid injections, enhancements in steroid injection treatment, and rising well being consciousness. About one hundred eighty million folks in India suffer from arthritis, based on Arthritis-India. The prevalence of many well-known diseases is higher than this, including most cancers, AIDS, and diabetes.
These regulations are applied by numerous sporting organizations and govern athletes’ eligibility to compete in events sanctioned by these organizations. Violations of anti-doping rules may end up in extreme penalties, together with bans from competitors and reputational injury. When used correctly, you’ll have the ability to count on to see most of these optimistic results. But when abused, corticosteroids can cause several dangerous well being effects, such as hypertension, irregular heartbeat, osteoporosis and cataracts. Comply With the recommended dosage instructions supplied for natural steroid stacks.
If somebody uses anabolic steroids illegally they typically use them to increase muscle mass (which can also enhance physical appearance), reduce the quantity of fats in the physique, and improve sports activities efficiency. Illegal steroids are usually taken by sports activities players, teenagers, and physique builders however may additionally be taken by females and enterprise males. Anabolic steroids play a major role in increasing muscle mass by stimulating protein synthesis throughout the muscle tissue. These artificial hormones mimic the consequences of testosterone, selling muscle growth and hypertrophy.
These three compounds are characterised mainly by their broad spectrum results on anabolic and androgenic dependent capabilities, as nicely as their interaction with aromatase. Expectedly, lots of the anabolic steroids in each household have similar attributes to one one other. Common steroids, known as corticosteroids, are medicines that scale back irritation and the activity of your immune system. They’re manufactured drugs that carefully resemble cortisol, a hormone that your adrenal glands produce naturally. It can set off mood swings, fatigue, restlessness, achy muscular tissues, and melancholy. If you have been taking steroids to deal with an sickness, these signs might come again, too.
On the opposite hand, two oxygen atoms of Glu353 firmly concerned in making a bond with the hydroxyl group of Estradiol spanning at a distance of 1.84, 3.38 Å. In this context, His524 forms hydrophobic interactions with the core of estradiol throughout the binding cleft, whereas Phe404 induces π-π interactions with estradiol. Ensuing hydrophobic interplay was introduced by Leu345, Leu346 and Ile424 contributing to the steadiness and specificity of the ERα-estradiol complex, which is important for mediating the organic effects of estrogens.
The medical use of those medication ought to all the time be under skilled supervision because of potential antagonistic reactions. Moreover, a 2017 survey printed within the Journal of the International Society of Sports Vitamin found that four.2% of gym-goers admitted to using anabolic steroids. This determine is probably going larger in reality, as the utilization of these substances is commonly underreported because of stigma and legal ramifications. The traditional listing of unwanted aspect effects applies; acne, hair loss, hypertension, man boobs and reduced sexual abilities.
The PCA module of the MDAnalysis [28] device was used to do the evaluation utilizing the 2 main elements. In addition, the simulated system’s free power profile was created utilizing the info from these main elements. Accomplished wrong, stacking can wreck your hormones, tank your lipids, and leave you chasing diminishing returns.
The cycles of steroid use are normally six to 12 weeks lengthy, followed by a relaxation interval. One particular oral steroid (dexamethasone) is usually used in the course of the tip of being pregnant if there is a threat of a pre-term delivery as it could assist the baby’s lungs to mature extra quickly and enhance the infant’s likelihood of survival. If this side-effect occurs, it tends to occur within a couple of weeks of starting remedy and is extra doubtless with higher doses. Often individuals even become confused; they might develop delusional and suicidal ideas.
Testosterone is the male hormone responsible for the development of the male reproductive tissue, bone and muscle mass, and the growth of physique hair. Most bodybuilders take testosterone within the suspension form because of its fast appearing nature and the reality that it could enhance quality of life overall, such as intercourse drive, temper, psychological sharpness, amongst other effects. It’s also important to note that there could be very serious risks from steroid use. While substances like testosterone alternative remedy (TRT) could be prescribed by a well being care provider for certain medical remedy – it is unlawful to acquire for leisure use including sports activities. Additionally, most sports have rules banning the usage of steroids and efficiency enhancing drugs. 19-nor compounds (Nandrolone derivatives) are most well-liked by athletes and bodybuilders for most of the similar causes that they would like DHT derivatives.
This means http://www.opencart-france.com/newsletter/pages/?dianabol_and_testosterone_cycle_for_beginners.html an individual needs extra of the drug to achieve the same effects they did beforehand with smaller quantities. Their our bodies become depending on the drug and continue to use it regardless of the unwanted aspect effects and well being dangers. When a person stops utilizing anabolic steroids, they could experience withdrawal signs.
Women can use Winstrol at very low doses for brief periods with minimal virilization threat. This steroid will usually place you at a better threat of virilization when you determine that the low dose isn’t sufficient – its androgenic (virilizing) effects are going to be extra pronounced than Anavar, Primobolan, and Equipoise. 25mg to 50mg per day is a good start line for model new feminine customers of Primobolan. However if you’re new to all this, you may be stunned to study that Anavar is derived from DHT. Regardless Of this, Anavar does NOT come with the potent androgenic unwanted side effects of most different DHT-derived steroids.
Here’s only one example of a standard 12-week cycle, together with concepts for newbie, reasonable, and heavy customers. You may even find peptides helpful for PCT due to their effects on performance and providing some anti-catabolic safety without the adverse impression on recovering your HPTA functionality. Your decisions shall be made primarily based on whether bulking or cutting is your major goal. But that’s just one facet of the story… The huge consideration with these commonplace cycles is making progress over a protracted interval – years if that’s your goal.
Nice share!
However, shopping for steroids from these sources could be dangerous, as the quality and purity of the product can’t be assured. This can result in severe health problems similar to liver damage, kidney injury, and coronary heart disease. One of the significant benefits touted by advocates of steroid alternatives is their legal status, offering peace of mind to those who need to avoid any association with illicit substances. The effectiveness of those substances can be highly particular person and influenced by elements corresponding to food regimen, exercise regime, and overall well being. It’s essential to strategy these dietary supplements with a critical eye, understanding that whereas some might present a efficiency edge, they are not a shortcut to health objectives. Their use should be balanced with a complete strategy to training and general well-being.
In conclusion, while steroid alternate options have proven promise in some areas, they aren’t a one-size-fits-all answer. The most strong and moral method to attaining fitness aspirations stays a dedication to holistic well being practices. Striving for health shouldn’t be on the expense of legality or personal well-being, and with the best strategy, the potential for safe and efficient gains is nicely within attain. One such class is ‘prohormones,’ that are precursors to hormones, often testosterone. Once ingested, these compounds are transformed by the physique into lively hormones, doubtlessly resulting in the identical results as anabolic steroids. While they have been bought over-the-counter until 2015, stricter rules now require them to be bought by licensed pharmacies and used under the supervision of a healthcare professional. Steroids, each anabolic and corticosteroids, are tightly regulated within the UK.
For example, one such product is D-Bal Max, which is among the greatest authorized steroids available in the marketplace. According to a quantity of surveys and reviews, the non-medical use of steroids is widespread in men between the 30s and 40s age group. Professional athletes, sportsmen, and bodybuilders are additionally doubtless to make use of it. Nonetheless, the supplemental form is more frequent among non-professional individuals, together with those who wish to hold their bodies fit and active through the late center ages. Greatest About D-Bal Max- here are some of the finest features that make this product suitable for folks trying to find natural steroid bulk cycle (https://www.semasan.com/sema/inc/?athletes_steroids.html) options. In London and the the rest of the UK, medical steroids, such as corticosteroids, are regulated by the Medicines and Healthcare products Regulatory Company (MHRA).
This blog supplies an in depth information that will help you make an knowledgeable choice. DecaDuro is one of the top-of-the-line authorized steroids for muscle growth and energy. It is a protected and effective alternative to the anabolic steroid Deca-Durabolin, which causes severe unwanted effects. DecaDuro is made with natural components that help enhance nitrogen retention, which is important for muscle growth. If you are considering muscle-building dietary supplements, it is essential to grasp the stark distinction between authorized steroids and anabolic steroids.
It additionally promotes purple blood cell production, which improves oxygenation and stamina during workouts. This authorized steroid various stimulates collagen synthesis,(7) which strengthens tendons and ligaments, reducing the chance of harm. Alpha Pharma Anavar, a potent steroid, is gaining recognition among athletes and bodybuilders for its exceptional benefits. Recognized for selling muscle development, enhancing energy, and growing endurance, it’s trusted by many health enthusiasts. With Alpha Pharma main the cost, uncover the transformative power of Anavar and take your health journey to new heights. In the UK, Stanozolol is assessed as a Class C controlled substance beneath the Misuse of Medication Act 1971. This means that it is illegal to possess, import, export, produce, or provide Stanozolol and not using a prescription from a licensed medical skilled.
These studies are not the «be all» and «end all» predictions of the unfavorable effects. Latest advances inside the manufacture of steroids have reduced the unwanted effects to a bare minimum. Of course, it additionally depends on whether the person sticks to the established really helpful doses, which come from internationally famend experts engaged within the manufacturing and sale of Anabolic Steroids. Maintaining the right stability in life is essential so as to accomplish everything you have got down to obtain. When planning on utilizing steroids, it’s important to comply with and implement the rule of thumb routines really helpful. Nutritional Vitamins, the so-called ‘anabolic security force’, will turn out to be an invaluable contribution to you throughout your exercises and will dramatically multiply your required outcomes. You should buy powerful anabolic steroids in UK that are suitable for attaining any kind of objective you set your mind to in our on-line anabolics retailer.
A love for climbing ropes and boarding slopes, he doesn’t have essentially the most traditional of exercise plans however he’s obsessive about finding out how much protein he can get from every little thing. His favourite health club move is double wave battle ropes, his favourite sports activities are soccer and snowboarding, and his personal finest is conquering a V6 bouldering climbing wall. Typically, blended dietary supplements appear secure, with a low danger of major unwanted aspect effects. A 2018 evaluation within the Journal of the International Society of Sports Activities Nutrition means that some multi-ingredient supplements can improve muscle performance.
SARM authorized dietary supplements do the identical thing, except that it does so with the assistance of natural ingredients. The Beast Stack contains ten (10) supplements formulated to fit a 2-cycle process of muscle growth, strength improvement, performance enhancement, fat-burning, and recovery. Clenbutrol is a strong thermogenic supplement claimed to help with weight reduction and improve cardiovascular performance. It works by increasing oxygen transportation, which can assist you to achieve a lean and ripped body. I have used Clenbutrol and found it to be effective in helping me reach my weight loss targets. The results I have skilled with Clenbutrol have been positive, and I imagine it may doubtlessly be useful for others trying to lose weight and improve their bodily fitness. Nonetheless, it’s important to keep in mind that any supplement’s effectiveness can range from person to person.
https://www.kingsburyholisticdentist.co.uk/pages/clenbuterol_for_sale_2.html, herbal pills corresponding to these offered at CrazyBulk mimic the steroid effect however with out its unwanted effects, providing muscle development and energy gain without side effects. Anabolic steroids similar to Anavar and Winstrol are utilized for the aim of helping users in sustaining muscle mass upon cessation of injectable steroid cycles. Lower-level oral steroids may be utilized to avoid the loss of muscle when testosterone levels are low. Albany, Ny, April sixteen, (GLOBE NEWSWIRE) — Oral anabolic steroids, or oral steroids, are artificial drugs which are related in action to the male sex hormone testosterone. Oral steroids are helpful whereas bulking, gaining strength, and other secondary male sexual attributes.
Furthermore, the price of Anavar could be very excessive, leading to fraudulent sellers decreasing the quantity of oxandrolone or eradicating it entirely in change for a cheaper substance. Pharmaceutical-grade Anavar was synthesized by scientists in a certified laboratory when it was legal for medical causes. This was prescribed to sufferers affected by cachexia, where muscle loss was occurring at an alarming fee, increasing the risk of mortality. They are additionally not very hepatotoxic, which means they can be used for longer durations at a time. I took a break and pulled blood again, and my lipids had improved considerably. Regardless Of the above protocol being efficient, DHEA is the official medical therapy prescribed to girls for low androgen ranges.
It is finest to seek the guidance of a licensed doctor for professional medical recommendation earlier than taking this supplement, particularly if you’re beneath any medication. Nevertheless, this ingredient is a good source of wealthy and healthy unsaturated fat and should offer various health advantages. The key right here is consistency — which is simply possible with a laser focus that keeps you decided throughout the training period. While I have lost the layer of excess fat around my tummy, there are unfortunately no six-pack abs beneath to indicate off. After all, my main focus during the fitness journey was cardio and a low-calorie diet.
These traits permit it to encourage muscle development without causing vital androgen-related side effects similar to excessive hair growth or deepening of the voice. Its anabolic properties primarily promote muscle tissue development and improve total strength. The dosage usually varies based mostly on particular person targets, tolerance, and experience with anabolic steroids. Males commonly use a every day dose of mg, while girls sometimes use a decrease dose of 5-15mg day by day. Consultation with a knowledgeable individual is recommended to determine an acceptable dosage.
» The steroids before and after imaging in this people head is so misplaced it’s laughable but most actually believe if they ever supplement they’ll achieve 20-50lbs of pure muscle. Even some veteran customers have this delusion as many do not perceive what true weight is. When it involves ladies, the really helpful dosage of Stanozolol is typically decrease than that of men as a end result of its androgenic nature. This lower dosage helps reduce the danger of virilization symptoms, which might embody deepening of the voice, facial hair growth, and clitoral enlargement.
Anavar is often regarded as one of many most secure anabolic steroids for females due to its delicate nature and the very minimal side effects it’s more doubtless to impose. That’s all, with correct dosages, cycle lengths, and individual responses thought of. Women should at all times be eager to monitor their our bodies for any dangerous effects and adjust dosing accordingly. Steroid use in bodybuilding has been a topic of intense debate for decades. Some bodybuilders swear by their transformative effects, while others warn of the risks.
Yet there are lawful over-the-counter ones you possibly can trust that may equally present the same end result without hazard. Hair Loss is one of the symptoms observed among individuals using Winstrol. Aside from that, hoarseness in voice and the looks of facial hair have also been noticed amongst people who use Winstrol.
Winstrol, also recognized as Stanozolol, is a popular artificial anabolic steroid that athletes and bodybuilders use for enhancing efficiency, muscle development, and promoting weight reduction. Inspecting earlier than and after outcomes of Winstrol customers can provide valuable insights into its potential benefits. Earlier Than beginning a Winstrol cycle, it’s essential to prepare adequately. A correct cycle sometimes lasts 6 to eight weeks, with a recommended daily dosage of 50 mg for men and 10 to 20 mg for ladies. It is essential to find out private targets and conduct thorough analysis on the potential side effects and dangers. Having a healthy diet and train routine can maximize the advantages while minimizing the potential antagonistic results.
For 95% of customers, especially newbies and intermediates, the base compound must be testosterone. Once signed in, you can participate on this website by adding your individual subjects and posts. Last second reporting you are coaching somewhere else buys you some time earlier than they could probably make new arrangements to get somebody to the model new place.
For instance, testosterone deficiency is uncommon in males underneath age 50. Cleveland Clinic’s primary care providers supply lifelong medical care. From sinus infections and high blood pressure to preventive screening, we’re right here for you. Made for the elite athlete and the strong-willed our merchandise had been designed to fuel your athletic performance. Counterfeit suppliers usually exhibit a number of telltale indicators that should alert a prospective buyer to their illegitimacy. Lack of proper licensing is one primary indicator; reliable suppliers should have verifiable licenses to distribute pharmaceutical merchandise.
At Aussie Steroid Pharma, we’re dedicated to offering high-quality anabolic steroids and performance-enhancing merchandise to help you achieve your health and bodybuilding targets. Whether you’re seeking to achieve muscle, cut fat, or improve total strength, we’ve a variety of products which are each effective and protected. Discover our site for the best choice of steroids, all available to be delivered discreetly and shortly across Australia. However, some persons are excited about increasing their steroid hormones to speed up or improve muscle growth. Since anabolic steroids are artificial and have important risks, this will lead people to turn to pure options. Some authorized steroids, corresponding to Clenbutrol, work by growing your metabolic rate so that you simply can lose fats and burn water retention. This supplement will increase purple blood cell manufacturing and promotes more healthy cardiovascular health.
Not Like conventional anabolic steroids, Clenbutrol is a protected alternative to Clenbuterol and does not come with any dangerous unwanted effects. To differentiate between real and counterfeit anabolic steroids, there are particular features of the product one should scrutinize. Product seals are a key area, as genuine products usually characteristic tamper-evident seals which may be difficult to duplicate. Verifying these seals in opposition to the manufacturer’s requirements can help decide authenticity. If a person takes anabolic or natural steroids that a doctor did not prescribe, they need to talk with a healthcare professional about stopping these supplements safely. Each kind of prescription anabolic steroid and every model has different possible unwanted side effects.
Nevertheless, whether or not pure variations of steroids are safe can be a matter of scientific research and debate. Some of those substances also have vital risks, and their benefits could also be unproven. How does one navigate the complex legal panorama surrounding the net buy of steroids? Looking For professional steering is important to understanding the legal penalties and making certain regulatory compliance. Completely Different jurisdictions have distinct laws that may have an result on legality and penalties for unauthorized purchases. We scrutinized the dosage of every ingredient to make sure it’s each safe and efficient.
These compounds claim to behave like human steroid hormones, corresponding to testosterone. Read on to learn about what pure steroid dietary supplements are and customary examples. This article additionally covers potential security issues and the benefits and risks of those substances. https://www.e-pol.it/media/articles/?integratori_per_dimagrire_1.html can customers guarantee the steroids they buy on-line are genuine and of excessive quality?
In order to avoid infections, it’s a good idea to avoid people who are sick. Earlier Than getting a vaccination, you must tell your physician when you take steroid tablets frequently. Some of the best sites to purchase steroids are also great bodybuilding useful resource web sites.
We solely advocate dietary supplements that include elements in doses which are proven to be efficient. Testo-Max’s components include D-Aspartic Acid, Magnesium,(7) Zinc(8) and Vitamin D3,(9) all of which have been proven to spice up testosterone levels. It is good for anybody trying to enhance their strength and energy throughout intense workouts. It is produced from pure elements and is completely freed from artificial hormones. As such, it’s suitable for use by each men and women who are wanting to enhance their athletic efficiency.
We completely reviewed the protection profile of every ingredient to attenuate the chance of unwanted facet effects. Solely legal steroids with secure elements, when taken as directed, are really helpful. Our selection process for the top authorized steroids in the UK was meticulous and thorough. Whether Or Not you’re a bodybuilder, athlete, or simply someone trying to improve their total fitness, there are alternatives for you. Hold studying to be taught more about the top legal steroids out there within the UK, and the way they’re ready to effectively enhance the results of your fitness routine.
This additionally means that the means to acquire https://bbrh.org/pages/dianabol_dosage_and_dianabol_cycle_for_best_results.html has turn into easier. So it’s more essential now than ever to educate the lots about these substances and their «proper use» ought to an individual determine to take the risk. Victor Martinez also explains that a proper coach or mentor will be ready to present intimately protocols to help with the post-cycle crash. To avoid shedding muscle, you have to of course proceed to coach and stay strict on your food regimen. But there are additionally non-steroid substances that may be taken to extend your physique throughout that three month off-cycle interval. These compounds work very in a unique way however will both help to restrict the chance of estrogenic unwanted effects.
His strategies provide a approach to excel in right now’s complicated bodybuilding world. Yates used specific pre-contest drugs and intense workouts to stay big yet lean. His strategy shows how good training and drug use can form bodybuilding success. Yates took 50 milligrams of Anavar every day, a bit greater than usually studied for fat discount. He also adjusted his hGH to eight IU day by day for higher outcomes. Notably, Yates stayed away from riskier drugs, preferring Clenbuterol for shedding fats.
Making Use Of these concepts proper boosts energy and dimension however reduces harm risks. Exploring how steroids help muscles develop presents vital insights. [newline]This makes it simpler for users to see big muscle gains quickly. Understanding both the good and bad features of steroid use is essential. This transformation was from a bodybuilder who was previously natural (left) after which took Anadrol (right). He stacked Anadrol with Deca Durabolin and, after a quantity of cycles, gained a big quantity of size and mass.
Do you want much more significant features than a Test-only cycle? Dianabol is run for the first six weeks solely (first forty days of the cycle), with Testosterone for eight weeks. Whichever method you go, you have to make certain all of the steroids are cleared from your system before beginning PCT. This is where understanding your steroid half-lives and clearance instances is crucial. Equipoise excels at cutting and is great at serving to retain lean muscle and provide a general enchancment in body conditioning.
We sometimes see Anavar shift cholesterol levels, lowering HDL and growing LDL; due to this fact, a modest increase in blood pressure could be expected (7). Testosterone’s androgenic effects can complement the fat-burning results of Anavar, albeit with some short-term water retention. The largest concern we have with the addition of trenbolone is will increase in blood stress. This is because it doesn’t convert to estrogen, and thus it could worsen cholesterol ratios. Taking 4 grams of fish oil per day has helped some of our patients stabilize their blood stress (3). Trenbolone has diuretic properties, hence why it’s also used as a slicing agent.
Many of the positive evaluations and experiences you’ll hear from Deca-Durabolin customers relate to its therapeutic and therapeutic results. Deca-Durabolin has intensive benefits for joint strength and bone health. This is all because of its capacity to advertise collagen synthesis for strengthening joints and connective tissue.
Primobolan and Anavar is a well-liked choice, although some women with the next tolerance than others may use testosterone as their base steroid. Additionally, throughout an intermediate cycle, steroids corresponding to Masteron Propionate could additionally be stacked properly with Testosterone Propionate. This mixture contributes to lean muscle progress with definition and hardness.
Any complement taken to reduce a patient’s coronary heart price might scale back fats loss, as the thermogenic effect is blunted. Primobolan is usually stacked with Anavar and testosterone for enhanced outcomes. Interestingly, Primobolan is not C-17 alpha-alkylated, regardless of existing in oral type. Deca Durabolin also raises prolactin levels, which may diminish libido in males. We have discovered that the addition of cabergoline, a dopamine receptor, has an inhibitory impact on prolactin. Thus, Dianabol is likely to produce similar, if not barely superior, results to testosterone in regard to muscular power and hypertrophy.
Simply like HGH, Anavar has a direct impact on the metabolism, and this interprets to highly effective fats burning. Anavar is a really fast-working steroid, and it is more doubtless to end in sooner and larger muscle gains in ladies utilizing it for that purpose. It is also only used for six to eight weeks, while you’re taking a glance at many months of HGH use to get acceptable outcomes. HGH can undoubtedly raise your appetite, however I’ve found that Ibutamoren does it more so – however this could be a person response. Nonetheless, if fat loss is your major objective, MK-677 can current some issues.
Primobolan (Methenolone Enanthate) is the choice of most strongmen, because it has a light effect and rare unwanted effects when used. Athletes who have already a minimal of once resorted to the assistance of a drug for enhanced physical training might observe an improvement within the reduction of muscle mass, with a clear venous drawing. It is advisable to do a well being check-up along with your physician earlier than utilizing any anabolic steroids cycle. You can get free cycle advice from our coach to realize your targeted objectives. Manufactured by Prime Labs, this complement features an array of natural components.
Alcohol has been proven to lower testosterone ranges, so it is suggested to limit consumption. Smoking, then again, has a negative impression on hormone ranges and overall health. First and foremost, it is crucial to take care of a balanced and nutritious diet to help the production of testosterone. Foods which are wealthy in zinc, magnesium, and vitamin D have been shown to naturally enhance testosterone ranges. Some examples of these meals embrace oysters, shellfish, lean meats, eggs, nuts, seeds, and green leafy vegetables.
Throughout cycles focused at attaining lean muscle tissues, Stanozolol is beneficial for its dual ability to take care of muscular tissues whilst facilitating fats discount. This makes it a crucial part of many athletes’ methods, notably when the aim is to reap a lean and toned physique with out compromising muscle energy and size. Combining the drug To increase the effectiveness of Tri-Tren, athletes combine it with other AAS. The only steroid that shouldn’t be used along with Tren is Nandrolone. The hottest amongst athletes are Tri-Tren bundles with Boldenone, extended Testosterone esters, Oxymetholone, Methandienone, Sustanon. This truth is explained by the flexibility of this AAS (Androgenic-https://ieet.org/wp-content/pgs/meilleur_bruleur_de_graisse_2.html steroid). Whether you’re an skilled bodybuilder or a newbie who is simply starting the athletic path, you can use the Winstrol 50 course.
Urtica dioica, or stinging nettle, is another wonderful testosterone booster. The greatest concern with this ingredient is that there is very little evidence to recommend its aphrodisiac properties or capacity to increase testosterone [8]. The Sarsaparilla plant has been used as a testosterone booster for hundreds of years.
Whether Or Not you’re a seasoned bodybuilder or just beginning your health journey, they provide products that cater to completely different fitness objectives and expertise ranges. Prime Take A Look At appears geared towards individuals who want an aphrodisiac benefit somewhat than a real Testosterone increase. They don’t have elements like D-Asp or Ashwagandha which might be in proven supplements like TestoPrime, and what they do embody has questionable proof, or no proof, supporting it. You should be no less than be getting two servings a day of a take a look at booster to make sure that the ingredients are continuously giving your physique the supply it needs to hold your testosterone levels ticking over. Tongkat Ali is one thing that ought to be more featured in a male enhancement supplement review content material somewhat than a T Booster. Even though, it’s lack of results for T are well known, there are still numerous low cost take a look at boosters out there that can’t resist placing Tongkat Ali Extract. HGH, when used appropriately at reasonable doses for restricted durations, does not come with the severe unwanted side effects that we see with most anabolic steroids.
The producer Prime Labs produces the oil primarily based Winstrol in 10 ml vials. Clients report elevated vitality levels after taking the complement. Prospects report elevated power levels after utilizing this supplement. It can also be worth noting that the price of Oxandrolon could appear a little extreme to some athletes. You should not consider steroids solely in terms of their effect on the body.
I notice that they don’t really use the word «Testosterone» on any page of their web site. That is to say they don’t truly claim to spice up your hormone ranges, a telling omission that seems to point they know their product doesn’t improve Testosterone. We additional present a restricted geographical scope of included studies, with all research being from countries in Europe or Brazil. Surprisingly, we didn’t identify any research from the US, Middle East, Oceania, Asia, or Africa. Over the previous years, completely different analytical strategies have been used to display screen, establish, and quantify AAS. GC–MS with [51] or without [40, 46] prior derivatization of the AAS has also been efficiently used to screen and quantify AAS, primarily based on their fragmentation patterns and retention occasions. For AAS, both low-resolution and high-resolution mass spectrometers have been employed.
Thus, they should solely be included if customers begin to observe early indicators of gynecomastia. Trenbolone, like Deca Durabolin, provides average progesterone activity, having the potential to trigger gynecomastia. Thus, users might want to keep away from using SERMs to prevent aggravating progesterone levels. Thus, if testosterone is the least poisonous steroid, the mix of testosterone and Deca Durabolin will be the least poisonous steroid cycle.
In the first case fertilization on the pure means could be possible, whereas in the second case IVF is beneficial if sperm depend is a minimal of 1 million per milliliter or above. The most critical complication of anabolic steroid use is the event of hepatic tumors, both adenoma or hepatocellular carcinoma. The hepatic tumors come up in sufferers on long run androgenic steroids, usually throughout remedy of aplastic anemia or hypogonadism, but sometimes in athletes or physique builders utilizing anabolic steroids illicitly. Tumors are usually found after 5 to 15 years of use, however onset within 2 years of beginning therapy with testosterone esters has been described.
This is due to testosterone producing substantial muscle and energy positive aspects whereas causing less cardiotoxicity than other steroids. Analysis has shown that a small dose of Winstrol, 6 mg/day for six weeks, was sufficient for HDL ranges to fall by 33% and LDL levels to extend by 29% (4). Considering bodybuilders can take 4x greater than this dose, this demonstrates the extent of cardiac toxicity with Winstrol. Winstrol (stanozolol) is among the most potent cutting steroids obtainable to bodybuilders. It promotes lean muscle tissue (1, 2) whereas simultaneously burning fats and enhancing muscle definition. In an try to normalize blood pressure, customers are really helpful to take four grams of fish oil per day, mixed with healthy eating and common cardiovascular exercise. Though endurance actions is probably not What Do All Steroids Contain In Their Structure (https://www.ihromamz.it/pages/dianabol_acquisto_1.html) some bodybuilders want to do when bulking, they can offer cardiac protection.
Schooling was offered once a week, with each session lasting round 1.5 h. No entry to cell instructional platforms was provided to this group, guaranteeing a clear comparability with the intervention group. This strategy controlled for any affect that patient education may need on blood glucose management, allowing for isolating the effect of the cellular platform. Steroid-induced diabetes mellitus (SDM) is a standard complication in patients with nephrotic syndrome (NS) undergoing steroid therapy. Effective blood glucose control is critical for improving outcomes in these patients. This study evaluates the influence of cell academic platforms on blood glucose management and affected person adherence in patients with NS mixed with SDM. Girls have been excluded if they had been in the second stage of labor, had chorioamnionitis needing pressing delivery, had mature lung growth, or if additional glucocorticoid remedy was judged to be important.
Not solely that, however your entire physique could look photoshopped, because the veins will invariably pop up greater than traditional. With every thing stated and accomplished, it’s lastly time to reply the burning question- how do bodybuilders look before and after utilizing steroids? And for this, we now have thought of a few of the hottest steroids used by bodybuilders all around the world. Though there’s no denying that steroids assist with sooner muscle building, most bodybuilders perceive that utilizing steroids alone won’t meet their requirements. That’s why they combine their steroid consumption with the best exercise and food regimen regimes to obtain optimum benefits.
Proper post-cycle therapy is key to maintaining some of the acquired progress. Some could begin to observe initial power and fat loss progress during the first month. Maximum results are sometimes perceived after 3-4 months of constant use. If your aim is to achieve muscle or scale back body fats, it’s nonetheless essential to take care of good diet and consistent workout routines. Even with steroids enhancing the method, you can not overlook the basics. Wenger is scheduled to seem on May 6, 2025, for a hearing on whether to remand him to custody pending sentencing. He faces a maximum sentence of 10 years in jail on the conspiracy to distribute anabolic steroids depend and 20 years in jail on the obstruction of justice rely.
Always method steroid use with caution and data to keep away from unnecessary hurt. First-timers are virtually all the time recommended to make use of some form of testosterone-based steroid in their first cycle and stack it with other gentle steroids if in any respect required. Likewise, they want to start with the bottom recommended dose and continue the cycle for not extra than 4 to eight weeks. Similarly, comply with the cycle with some type of post-cycle remedy to help stabilize your hormone ranges.
Diet was super clean throughout this time and simply did about 2,300-2,500 calories a day with 2 grams of protein per body weight. Crazy Bulk manufactures pure and FDA-approved compounds that mimic the anabolic effects of steroids but with out deleterious unwanted side effects. We also see Anavar taken by males as a first cycle (instead of testosterone) if mass achieve is less of a priority and fat loss is the primary objective. Weight scales might not fluctuate much as a end result of simultaneous fat-burning and mass-building results from Anavar.
Every 10 mmHg reduction in systolic blood stress reduces the chance of main cardiovascular occasions, coronary heart illness, stroke, heart failure, and all-cause mortality by 20%, 17%, 27%, 28%, and 13%, respectively (95). A persistent pharmacological improve in blood strain – such as brought on by AAS use – can be imagined to have the inverse impact. Orally ingested AAS are rapidly absorbed within the gastrointestinal (GI) tract, with serum concentrations peaking 1–2 hours after ingestion of methyltestosterone (8). Without structural modification to withstand first-pass metabolism, a large fraction of the absorbed AAS shall be metabolized before leaving the liver and re-entering the circulation. For instance, after oral administration of 25 mg testosterone, lower than 1 mg (4%) turns into systemically available (9).
These enzymes catalyze a discount reaction at carbon 5, including an α-oriented hydrogen atom. With testosterone as a substrate, this response yields probably the most potent naturally occurring androgen, namely, dihydrotestosterone (DHT). In adults these enzymes are expressed, among other tissues, within the liver, skin, prostate, epididymis, seminal vesicles, testis, kidney, pancreas and brain (19). It should be noted that DHT isn’t thought to contribute to the muscle-building effects of testosterone. DHT levels are (very) low in skeletal muscle because it doesn’t significantly express the enzyme.
This is the conventional trade-off in phrases of the use of anabolic steroids, or virtually anything on this world. This is why anabolic steroids hold such a huge selection of application in science and medication, which may be attributed to their diverse governance on the completely different systems of the physique. This was one of the authentic objectives of the anabolic steroid improvement increase of the Nineteen Fifties.
They have an effect on many elements of the body, together with the muscle tissue, bones, hair follicles, liver, kidneys, blood, immune system, reproductive system, and central nervous system. The severe Tren unwanted aspect effects include insomnia, anxiety, night time sweats, speedy coronary heart fee and libido suppression and often erectile dysfunction. Imagine every one within the worst method potential and now take it beyond that point and you will start to get a good idea. Lets be clear, nearly all of males who complement with Trenbolone shall be fantastic in the occasion that they complement responsibly however there are those who even with responsible use will fall prey. Further, those that supplement with high doses tremendously and dramatically enhance their chances of incurring Tren side effects. Nonetheless, take note that some people might expertise this adverse response while some might not. If this ADR causes discomfort, think about reaching out to a medical skilled for attainable steroid options.
Doctors generally prescribe AASs to treat sure situations, such as low testosterone or delayed puberty. However, many people illegally use them to extend lean muscle mass. This may be for bodybuilding, growing efficiency or endurance, or shortening restoration time between workouts. Nonetheless, the negative results of anabolic steroid use transcend the individual user’s bodily and mental well being into society. First off, it’s important to grasp that steroid use can considerably improve the danger of creating mental health problems. We’re not simply talking about short-term mood swings right here; we’re taking a look at full-blown psychiatric circumstances. Depression, anxiety disorders, and even bipolar disorder have been linked to steroid use.
Ask your physician for more data or if you present any of the next. Though elevated testosterone levels can increase your energy and muscle-building, excessive levels can actually have adverse side effects. Anabolic steroids, additionally called anabolic-androgenic https://juvalife.com/pag/these_are_the_best_supplements_to_get_ripped.html (AASs), may help build muscle and improve athletic performance, but they’ll also have vital opposed results, especially when used incorrectly. The medication are derived artificially from the main male hormone testosterone. Testosterone is important for selling and sustaining muscle growth and creating secondary male intercourse traits, similar to a deep voice and facial hair. In compliance with a study revealed within the Archives of Dermatology, one of the most frequent side effects of steroids injection is zits, post-injection ache, and swelling of the injection website. There can be a risk of creating an allergic reaction to a steroid drug.
Some corresponding to deepened voice and increased facial hair might even be desired. Prednisone may cause hurt to a developing fetus if it’s taken throughout being pregnant. In addition, babies might have hormone issues, similar to low ranges of adrenal hormones, as quickly as they’re born. Your physician might monitor your new child for signs of low hormone levels if you took prednisone while pregnant. In fact, weight achieve was one of the most frequent unwanted aspect effects reported in people taking a brand-name version of prednisone referred to as Rayos.
• Bodily Bodily Modifications – When men take an excessive quantity of estrogen, they can develop breast tissue and develop man boobs. When women take an extreme amount of testosterone or too much of the anabolic hormones, they danger modifications to their bodies too. For girls, the chance is rising a larger clitoris • Increased Body Weight – Count On that your physique won’t only wish to develop muscular tissues but store fat too.
This product just isn’t designed to diagnose, treat, treatment, or prevent any illness. Central Nervous System (CNS) Enhancement Strength isn’t just about muscle — it’s also concerning the CNS, which controls muscle activation. Steroids like Trenorol can improve CNS responsiveness, making you more efficient at recruiting muscle fibers for heavy lifts. In Distinction To cumbersome mass gainers that gradual you down, WinMax helps preserve explosive output and endurance while staying mild and agile. You’ll feel sooner, extra agile, and extra responsive, even deep into your calorie deficit. One of the signature effects of Winstrol was its ability to create a tough, dry, and vascular look.
For women, the obvious aspect effect of taking trenbolone and different types of artificial testosterone is virilization. This is when a girl develops what many name «exaggerated» masculine traits, similar to excess facial and physique hair (a.k.a. hirsutism), baldness, a deeper voice, and zits [28]. To illustrate, u/kartiman known as it a promising natural various to Clenbuterol on r/reviewsza. Nevertheless, additionally they mentioned that the person results might vary [16]. The ingredient dosages and the scientific backing for some of the product’s claims don’t strongly support its potential as a robust «Legal Steroid/PED» throughout the evaluated categories.
These components often include plant extracts, amino acids, nutritional vitamins, and minerals that work synergistically to assist numerous physiological processes within the physique. Authorized steroids are legally available over-the-counter or on-line, without the need for a prescription, making them extra accessible to people seeking efficiency enhancement. Besides rising the body’s own pure production of testosterone, Test-600x at the same time inhibits the production of estrogen, as properly as reducing SHBG levels. Furthermore, they offer exceptional bulking and slicing results with none fear of unwanted facet effects.
The authorized steroid is especially well-liked amongst younger people as a result of they should build up mass within the shortest possible time. The producer took this into consideration, so they had set a very inexpensive value for his or her product. A every day consumption of two tablets will increase the manufacturing of purple blood cells (erythrocytes). This moreover nourishes your muscles with oxygen, which positively affects their work and growth. Not so way back, CrazyBulk up to date the method of its authorized steroid, growing the variety of ingredients.
This ends in strong features which would possibly be pure muscle (without water retention) and a a hard, outlined look. Then, whenever you’re accomplished lifting, Tren-Max cranks up your recovery — so you experience more development with much less downtime. Authorized steroid options typically contain pure components which were scientifically selected for his or her potential to assist muscle development, improve performance, and enhance recovery. These elements can embrace plant extracts, amino acids, vitamins, minerals, and other compounds that work synergistically to advertise particular physiological processes throughout the physique. These products combine the best options of authorized steroids regardless of containing all-natural components paired with affordable value tags.
It positively doesn’t hurt that legal steroids may be bought proper over-the-counter without having to fret about the feds kicking down the door, either. The testosterone PCT Stack is a great stack for those seeking to supercharge their testosterone in a fast, protected means. Simply as with traditional anabolics like Sustanon, this stack provides you with all the advantages of elevated hormone levels. That being stated, when combined some of these legal steroids are able to dramatically amplify the results that they’d have been able to producing all on their very own.
This means it will be simpler for you to resolve on the one that may finest allow you to reach your fitness goals. That stated, in case you have any preexisting health circumstances, you will need to consult your doctor before taking a authorized steroid different. Getting rid of stubborn fats permits you to begin focusing on building your muscles and power as you streamline your fitness regimen toward larger objectives. Testosterone plays a role in endurance, vitality, muscle gain, and fat loss, and preserving your T ranges high can benefit your well being and wellness total. Once you realize what fitness targets you would like to assist, you presumably can search for greatest slicing steroid products that examine off all your bins. Authorized steroids don’t include any of the harmful, potent medicine you’ll discover in anabolic steroids. Their solely similarities are the outcomes they produce on your health and health.
Customers of Winsol in Australia have claimed to note that their muscles look more sculpted, leaner, and extra outlined when utilizing this product. It helps you develop and enhance more durable, more defined muscle tissue with out making you seem cumbersome. After a couple of month of use, not solely did my energy levels go up, but I additionally felt stronger and had higher endurance, permitting me to push myself more than Where Do I Buy Steroids (https://www.oaza.pl/articles/12_week_steroid_cycle.html) ever had earlier than.
For most people, the safer and extra sustainable route involves legal options and natural supplementation methods that assist the body’s personal anabolic processes without compromising well being. As we wrap up our dialogue, it’s essential to consider the advantages of utilizing authorized steroids like Crazy Bulk. These products not only assist muscle development but additionally contribute to improved endurance and stamina, which could be crucial for anyone trying to push their limits in the fitness center.
When combined, these supplements work synergistically to speed up muscle growth, enhance energy, burn fat, improve restoration, and improve overall performance. The CrazyBulk Development Hormone Stack is designed that can help you achieve spectacular outcomes and attain a ripped and muscular physique in a shorter period. This amino acid is crucial for nitric oxide production, which helps enhance blood move to muscular tissues. Higher blood move means more oxygen and vitamins are delivered to muscles during exercises, enhancing efficiency and restoration. L-arginine is important for maximizing their exercise efficiency and muscle growth.
I begged my mum to let me get some weights at home within the storage, and it just so happened that my cousin had an old bench and a few weights that he stated he’d give me to assist me exercise. My love affair with the cold contact of steel had begun, and I started following the exercise plans in the magazines. However there was a lot information that I was drowned with what I should be doing. Fortunately for me, my luck was in as my window cleaner was at the time – the World Champion Powerlifter. After a number of months with my arm immobile, I was aching to be out riding once more, jumping and racing down big hills.
Although, I can perceive why some natural bodybuilders who feel like they’ve carried out all that they can naturally would be excited about going all-in. Ryan’s excellent physique necessitates a stringent administration of regulated meals consumption and exercise. He eats 5 meals daily, which represent a total of 3,800 calories.
Another misconception that individuals are inclined to have about health is that girls shouldn’t lift heavy weights, or no much less than not as heavy as those men do. Else, they will bulk up like those power-lifters we see on the stage of body-building competitions, and will lose their grace and femininity. Rob bursts this bubble by saying that these individuals are infamous for consuming performance-enhancing medication or https://www.actuabd.com/archives/pgs/trembolona_comprar_4.html that artificially dimension up their physique. Bien sûr, speaking with the judges instantly could be probably the most useful, but when this is not possible, other past competitors may help shed some gentle on the judging standards. Of course, speaking with the judges directly would be probably the most useful, but when this is not potential, other previous rivals might help shed some light on the judging standards. I turned to the health magazines I had seen within the shops after I was buying my biking mags, hoping that they may help me be taught more about what workouts I wanted to do for me to get again on my bike.
Whichever it becomes, we’ll see that in case you work troublesome. And step-by-step you can also be rewarded with a body of greatness. Maybe it was his aggressive nature in school with a thirst for the win! Or presumably it turned into his universal methodology to existence to go one step.
His final meal of the day is usually both a steak meal or a salmon, and that’d be about forty five minutes before bed. The cause Terry consumes important fatty protein sources before mattress is because they are slow-digesting, which is perfect as your body is shutting down, able to chill out and recover. Well, though Ryan is posing in another way in the last snapshot, it’s evident that he is considerably greater than the 2013 picture depicts. Therefore, it stands to purpose that Ryan gave up some muscle mass while preparing for the UKBFF show, after which he regained his glycogen after he resumed his common diet regimen. In 2010, Ryan Terry entered the Mr. Nice Britain competitors, where he gained first place. The identical 12 months, he competed in Mr. International and gained the primary prize too. As a end result, he discovered sponsorship with USN, a complement company, and that is the place things started shaping up for the health model.
According to his LinkedIn profile, he’s the fitness studio supervisor of his group which is positioned in the L A metropolitan area. He stands at a top of 5 toes 10 inches (177.5cm) and a bodyweight of 185 – 195lbs (83.9 – 88.5kg). He has a chest that measures forty one inches and a waist of 31 inches. For somebody who has spent lots of effort and time trying to build his physique, Riches has a very good physique build. It’s worth noting that some of the federations mentioned above attempt to expose people who take a look at positive for medication.
When Riches was 15, he broke his clavicle doing a mountain bike stunt, and commenced lifting weights to regain power. Riches studied video manufacturing in faculty, after which labored as a bartender and in advertising after commencement, but his first love was coaching. He grew to become a private trainer and in 2005, he acquired an offer to model for a supplement firm. That similar year, Riches won his very first bodybuilding competitors, and juggled competitors, fitness modeling, and rising his private training enterprise. In 2007, Riches moved to LA and soon was internet hosting The Rob Riches Present where he interviewed health professionals and different personalities. When natural bodybuilders are at a low physique fat degree, they’re depleted and have a extremely hard time keeping their muscle mass. The BuFF dudes don’t have that drawback and revel in a significant physical growth even at very low body fat ranges.
He loves Cookie Crisp cereal, french fries, lasagne, and Pop Tarts. David Laid is legendary for his transformation videos, displaying how he bulked up from a slim teenager to a constructed adult. His fast transformation has raised eyebrows, however he retains quiet on the «natty or not» entrance. I personally love his movies and the way he explains all his exercises, and their advantages. I Might wish to know how the remainder of you’re feeling about him in the fitness community. ATP functions as a universal energy carrier in residing organisms, transferring energy inside cells for numerous metabolic reactions.
He dedicates his life in the path of a healthy way of life and clear food regimen, the steroids are actually not the one reason for his superb physique. Since ending his wrestling profession he’s targeted extra on bodybuilding and has gained a big amount of measurement. Nevertheless, he hasn’t gained an enormous amount of size as he was fairly jacked earlier than.
Whether Or Not he has taken safest steroids for bulking (https://tumundobio.es/content/pages/comprar_trembolona.html) or not, the difference is spectacular. Generally he trains twice per day, this is something that is borderline inconceivable to attain with common ranges of testosterone. One of the most important explanation why The Rock is most likely not on steroids is the truth that he has been training for such a very long time. Anabolic steroids are artificial hormones which would possibly be designed to imitate the benefits of the sex steroid testosterone. Dwayne says that he eats 5 meals per day, plenty of protein, plenty of fat, and many carbs. He has beef and oats for breakfast, then his day will consist of steak, rooster, fish, eggs, and protein powder (alongside fruit and veg and carb sources similar to rice).
No, it’s not possible for 99% of the inhabitants to attain a physique just like the Rock naturally. Even a 50-year-old who was on testosterone-replacement-therapy (TRT) would not be capable of do it. When in style podcast host and former UFC commentator Joe Rogan speaks, individuals have a tendency to concentrate. Particularly, Joe claimed that the Black Adam star was lying about not using steroids and implored him to come clear for the sake of his fanbase.
Regardless Of his spectacular physique, there isn’t any indication that he depends on chris evans pure steroids. Being a Hollywood star and figure will just make anyone ecstatic as a outcome of attention, fame, and naturally, wealth that comes together with it. Rob Moore then remembered when Doucette once accused The Rock of using steroids to maintain up his robust body. Moore also got a quick response from the former bodybuilder. Nonetheless, it represents a musician adding fresh planks to a formidable artistic streak. The well-liked actor, who on the time aspired to interrupt into the NFL was hit onerous by numerous accidents which finally halted his progress. As per MTV, Dwayne Johnson, in 2009, admitted utilizing steroids throughout his faculty years.
When Sylvester Stallone was caught with efficiency enhancers in his baggage, we might definitively say that he had been utilizing them. But till Dwayne Johnson is caught in an identical situation (if that ever occurs) we will only speculate. If a non-assisted lifter trained twice per day for six days in a row they’d burn out ridiculously quick. If you could dedicate 80% of your life to wanting unbelievable, you may be stunned at the outcomes. Having the best physique on the earth is Dwayne Johnson’s bread and butter. He has made a living out of being strong, toned, and powerful.
Their various backgrounds and intensive experiences contribute to the rich and informative content material discovered on Muzcle. Every writer brings a singular perspective, making certain a complete and interesting reading expertise for our audience. It remains to be seen whether he will tackle continued but unproven steroid allegations. In Distinction To most fighters, Sonnen admitted to utilizing the drugs he examined positive for but confused that he knowledgeable the relevant parties about what he was taking and why. As of now, WWE fans expect The Rock to return very quickly to construct a WrestleMania 39 feud with Roman Reigns. If The Great One does make a comeback for a match at WrestleMania Hollywood, the present just may find yourself as its greatest edition so far.
Superstar Billy Graham was certainly one of wrestling’s most outspoken stars, just like the time he sued Vince McMahon and WWE. Whereas some wrestlers received massive pushes in WWE and ultimately grew to become megastars, they had been overrated. It contains elements such as Fenugreek Extract, Korean Red Ginseng Extract, Bioperine, Vitamin B6 and extra as proven beneath. When combined will assist increase strength and muscle by increasing nitrogen retention and protein synthesis.FYI, There are a number of consumer testimonials available that back up these claims.
Right Now Dwayne the Rock Johnson is a broadly known motion and comedy film star, who sometimes visitor stars as a wrestler with World Wrestling Entertainment. After graduating from the College of Miami, Dwayne decided to comply with in his father’s (and grandfather’s) footsteps and turn out to be a professional wrestler. Dwayne was born in California in 1972 and was the son of another skilled wrestler, Rocky Johnson. His statements though state that he is all pure however his extraordinarily ripped physique and defined muscular tissues tell a unique story.
Soon after realizing steroids’ unwanted effects, he stopped using them. When someone hops into steroid use, trapezius muscular tissues are the primary muscle group to explode more rapidly than any other muscle group. And very quickly he was signed for WWE which was back then known as WWF and his wrestling profession started. This question «Is rock natural» is raised due to significant modifications in his physique. He enjoys cheat meals, like bacon cheeseburgers with all of the toppings. Also, seven completely different dietary supplements help his well being and workout wants.
Natural supplements provide a safer and extra sustainable muscle-building and performance-enhancement approach. Whereas both goal to enhance physical performance and assist muscle progress, they differ significantly in composition, operate, and influence on the physique. Due To This Fact, exploring each choice in detail and understanding its distinctive traits https://soshgic.edu.gh/admissions/pages/clenbuterol_dosage__getting_the_right_amount.html essential to make an knowledgeable determination.
Here are the key components to think about when deciding between anabolic steroids and pure dietary supplements. HyperGH14X is renowned for its position as an HGH releaser specifically geared toward selling lean muscle progress. It’s designed to assist people in attaining a extra sculpted physique by naturally boosting Human Development Hormone (HGH) production.
Out of all the options on our review of the top legal steroid options, D-Bal works the best for the bulking phase. It promotes rapid mass muscle gains and supplies an unimaginable improve in vitality, stamina, and muscle strength. It also supplies an increase in your metabolic price and lets you shred without muscle loss. Its distinctive mix of components like Ashwagandha and MSM significantly boosts testosterone, muscle mass, and recovery. I Am particularly impressed by its natural composition and effectiveness in muscle growth, making it a safe different to anabolic steroids. One main concern with anabolic steroids is the mandatory need for Post-Cycle Remedy (PCT) to restart natural testosterone production.
Anavar is a mild steroid; therefore, the positive aspects customers experience is not going to be remarkable, and the same applies to its unwanted side effects. Nevertheless, in terms of pure muscle acquire, we rank trenbolone among the greatest bulking steroids. Sustanon 250 is an effective testosterone ester used in bulking cycles to add vital amounts of muscle and power.
It Is like nature’s answer to these in search of a authorized method to boost their anabolic hormone levels. Plant-based steroids, also called phytoesteroids or phytosteroids, could be helpful for bodybuilding because of their capacity to imitate anabolic properties. Common examples embrace ecdysterone, present in spinach, quinoa, and yams, which is touted for its muscle-building potential and minimal unwanted aspect effects. Diosgenin, current in wild yam and fenugreek, serves as a precursor to varied anabolic hormones and is believed to reinforce muscle mass and strength. Then there is Suma Root extract, Tribulus Terrestris, Ashwagandha, Bulbine Natalensis, Pine pollen, Tongkat ali, Fadogia agrestis and so on. Now, when you’re anything like me, you are most likely considering, «But is these items really legal?» The reply is yes. In Contrast To artificial anabolic steroids, deer antler velvet and IGF-1 supplements fall into the category of pure legal steroids.
Customers who do expertise side effects often have solely delicate symptoms, similar to nausea or stomach ache. These effects are a lot much less potent than what the typical person experiences with long-term anabolic steroid use. Anabolic steroids are additionally unlawful to consume and even get hold of without a prescription. Athletes ought to use these highly effective steroids only with the approval of a medical skilled.
One of the most reliable studies mentioned above found that taking it in complement kind didn’t result in symptoms of liver or kidney toxicity. It additionally appears to result in fewer side effects in comparability with other steroid drugs, corresponding to adjustments in appetite, mood, libido, hair development and sleep. Additionally, these consultants can stop you from utilizing supplements wrong and doing workouts that would harm you. To sum it up, mixing totally different weight and resistance training strategies into your routine will significantly better muscle growth and power. Necessities like progressive overload, taking creatine, and maintaining the correct kind play an enormous position in enhancing energy training. Preserving the proper form throughout exercise prevents accidents and boosts your outcomes.
Selecting natural steroid alternate options is the smartest method to construct serious muscle mass while defending your health. Not Like unlawful anabolic steroids, legal dietary supplements use natural, plant-based compounds that promote muscle growth, enhance fats loss, and enhance performance—without the tough unwanted aspect effects. Anabolic steroids are designed to offer synthetic testosterone to your body, which has extreme well being risks when used with no prescription over long intervals of time.
At Present, eight compounds (37–44) of this kind have been found only in Apocynaceae household, together with Kibatalia and Paravallaris (Table 2). Phyllobates terribilis frogs, made into poison darts by Central American indigenous people, advertise their lethal armament with their gaudy colors. Batrachotoxin (615) is a potent neurotoxin within the skin secretions of those frogs and as a software to review voltage-sensitive sodium channels of excitable membranes [8, 9]. Toxicity is widespread amongst dwelling organisms and how these frogs avoid poisoning themselves remains a mystery. A examine addressed that a single rat muscle Na+ channel mutation confers batrachotoxin autoresistance [10]. People must be especially cautious taking natural dietary supplements if they are taking prescription medication, Gurley stated. While «caffeine, for essentially the most part, is fairly innocuous,» Gurley mentioned, in athletic supplements «lots of times, you do not know how much caffeine you’re taking.»
After eight weeks, the rats skilled weight reduction even though they consumed giant quantities of fat. People select to make use of steroids as a result of there might be simply nothing else on the legal market that will have such profound effects on athletic efficiency. The thing is, there are supplements that may rival steroids with out the deleterious results, they simply aren’t bought in very bioavailable types.
Manufacturers are responsible for their own analysis of the security and labeling of their products before marketing, which explains why prohormone supplements are technically legal regardless of the well being risks. This compound started taking heat the same 12 months it turned commercially obtainable, beginning with a 2005 Washington Publish article on designer steroids. Bodybuilders’ capacity to buy Superdrol was additional threatened when famous anti-doping scientist Don Catlin compared this product’s results to the unlawful Masteron. This led to the FDA issuing a robust suggestion to ban Superdrol, which was granted by the us Nevertheless, methasterone continues to be generally referred to as Superdrol today as a result of model name’s earlier mainstream availability. You may have heard about DMZ Dymethazine if you’re looking for for a potent prohormone to assist within the fast growth of muscular development and strength. A lot of sportsmen and bodybuilders use this anabolic steroid since it gives them great results without making them puffy.
Anyone who is new to Superdrol is strongly suggested to begin day by day dosage at 10mg. Then, by the second and third weeks, you’ll find a way to improve your daily Superdrol dosage to 20mg (half in morning/half in evening). Examine out the following Superdrol cycle, the place the newbie is strongly advised to keep away from upping their dosage to 30mg within the fourth week. A actual prohormone shall be turned into the specific desired hormone when it enters your body.
Do not devour, or use this product in any kind without consulting your doctor first. Steroid dependence is another severe and perhaps underestimated adverse event of AAS abuse. Knowledge from the Anabolic 500 survey showed that nearly one quarter of AAS customers have been dependent on these medicine [90].
Its results, when mixed with the best training and diet, can result in a well-defined, muscular physique. The transformation ushered in by the DMZ Prohormone Cycle was nothing wanting astonishing. The muscle acquire was visible and substantial, but it was the surge in power ranges that actually astounded me. Every exercise session post-DMZ seemed supercharged, permitting me to raise heavier and push harder. The mirror mirrored a newer, extra assured me, a sworn statement to the potent capabilities of the DMZ Prohormone Cycle. The gratification derived from reaching and surpassing my physique objectives was immeasurable, propelling my self-assurance to new heights.
After all, lots of weekend lifters have been legally taking this compound with none on-cycle supplements or post-cycle therapy. Considerations have additionally been raised about the impact of DMZ Prohormones on cardiovascular well being. Some users have reported experiencing an increase in blood stress and cholesterol levels, each of that are risk components for numerous coronary heart conditions. Making Certain common check-ups and maintaining https://www.yojoe.com/include/incs/liquid_clenbuterol_dosage_chart.html heart-healthy lifestyle is paramount when utilizing substances that might impact cardiovascular well being. Anecdotally, DMZ is reported to be mainly equivalent to Superdrol (even though one would possibly expect it to be twice as strong). Subsequently, you possibly can expect huge gains in muscle mass and power with no water retention, together with increased muscle hardness and vascularity.
This period appeared cheap sufficient to watch vital changes in muscle mass and energy while minimizing the chance of potential side effects. Dosage is one other crucial factor that can greatly impression the end result of the cycle; a balanced dose can pave the way in which for optimum outcomes. The DMZ Prohormone Cycle is not a one-size-fits-all, hence tailoring the cycle to meet particular person objectives and physique responsiveness is crucial. The increase was attributed to upregulated bile acid synthesis by a mechanism of increased expression of CYP8B1. Also, low HDL cholesterol levels in both reported instances probably point out the shift of ldl cholesterol transport towards bile acid synthesis, thus contributing to elevated intracellular content material of toxic bile acids. Hematoxylin and eosin-stained histological evidence showing cholestatic damage, ductopenia, and persistent hepatitis with mild fibrosis after ligandrol and post-cycle therapy misuse. In the lobules, there is predominantly canalicular cholestasis, dilation and numerous biliary plugs between hepatocytes, in the Kupffer cells and fewer within the cytoplasm of centrilobular hepatocytes.
The onset is normally insidious with growth of nausea, fatigue and itching followed by darkish urine and jaundice. Jaundice and pruritus can be prolonged even if the anabolic steroids are discontinued promptly. Typically, serum enzyme elevations are fairly modest, with ALT and alkaline phosphatase levels that are lower than 2 to 3 times elevated and which are typically normal despite deep jaundice. Serum ALT levels could additionally be considerably high early throughout harm, but then fall to moderate or low ranges. Liver biopsy sometimes reveals a bland cholestasis with minimal inflammation and hepatocellular necrosis.
There are focal degenerative signs of hepatocytes with vacuolization, with out steatosis, with some spotty necrosis. Mild mononuclear inflammatory infiltrates within the sinusoids, markedly multiplied Kupffer cells with cholestasis. Among muscle-building novice athletes, SARMs (ligandrol or ostarine) and/or substances in PCT may cause cholestatic liver damage with prolonged recovery.
Its legality, notably when sold as a pro-hormone or research chemical, doesn’t negate the necessity for caution. It is not a substance for beginners or the health-conscious and will solely be considered by extremely experienced bodybuilders who are aware of the potential consequences and are prepared to take rigorous health precautions. It’s also crucial to seek the assistance of with a healthcare provider knowledgeable in sports activities drugs earlier than considering DMZ or some other AAS, to completely understand the dangers and needed precautions. Usually, prohormone are pro-DHT or pro-testosterone, which is probably the most ample naturally-occuring male steroid hormone. Keep in thoughts that steroid hormones labelled as prohormone are not real pro-, they’re only lively steroid hormones. Blood work reveals Cynostane has a much less detrimental effect on blood lipids, and liver values than Superdrol.
Furthermore, the prohormone resembles Superdrol, which was banned by the Food and Drug Administration. Current epidemiological data confirmed a correlation between low testosterone levels in men and incidence of heart problems and stroke [47]. In experimental models, exposure to DMZ leads to interplay with the androgen receptor in a fashion analogous to testosterone. This interplay triggers comparable intracellular signaling pathways and induces transcriptional regulation. I supplemented with IML’s Tremendous DMZ 3.0 in 2013 and whereas I was still reaping the advantages of «newbie features,» I found the third model of this product to be one of handiest to date. Strength, fullness, roundness, and muscular density, while sustaining a lean physique are all indicators that your supps are working and had been all outcomes skilled with 3.zero.
He left his homeland and vowed to wage a worldwide «digital resistance» in opposition to government incursions into privacy. «As the political scenario in the world becomes more unpredictable, more governments might attempt to block privacy-focused apps like Telegram,» mentioned Durov just lately. Silver, an American-Israeli from a Hasidic background, began utilizing his Fb page as a market to connect marijuana dealers with consumers in 2015, after years of loudly advocating for the drug’s legalization in Israel. This was 4 years after the emergence of Silk Highway, which quickly grew to become the gold normal for decentralized, nameless marketplaces operating on the darknet. Founded by the American Ross Ulbricht (whose on-line nom de guerre was «Dread Pirate Roberts»), Silk Street was estimated to be worth over $1 billion inside two years of its founding, selling every little thing from pot to AK-47s. As the website grew in notoriety, Ulbricht grew to become a mannequin for a new generation of digital drug kingpins — and, together with his arrest in 2013, a harbinger of what might await successors like Silver.
The best and most trusted ones embrace Humatrope, Zorbtive, Omnitrope, Saizen, Norditropin, Serostim, Genotropin, and Hypertropin. Expect to pay $1000 or extra for any of those real pharmaceutical-grade HGH products. Anyone who has used real pharmaceutical-grade HGH will normally say it was properly value their funding.
Some IPED users will take just one substance, nevertheless customers typically take a quantity of different drugs concurrently (‘stacking’) in advanced, high-dose regimens. Further medicine, corresponding to Tamoxifen, are often taken as they’re believed to counter some of the unwanted facet effects of steroid use. This product is designed for adults over the age of 18 who desire to increase their endurance to complete longer, more intensive exercises. The pill is specifically created to build muscle growth and improve muscular efficiency. It causes the muscular tissues to retain extra nitrogen, which is essential for protein synthesis.
Related to anabolic steroids, the utilization of human progress hormone (HGH) is legal in Spain when prescribed by a licensed medical skilled. It is necessary to note that HGH just isn’t an anabolic steroid, but it is often used in conjunction with steroids to enhance athletic performance. Regardless Of its authorized standing, the unauthorized use of HGH can result in extreme well being risks and potential authorized penalties. Legal steroids are natural, over-the-counter supplements designed to simulate the muscle-building results of anabolic steroids—without the synthetic hormones or harmful unwanted effects. Not Like illegal anabolic steroids, which are sometimes injected or require prescriptions and come with critical legal and health dangers, authorized steroids are protected, authorized, and created from pure elements. Peptide hormones, similar to human development hormone (HGH) and insulin-like growth factor (IGF-1), are used within the medical field for treating various situations.
Native investigators also seized, 55 kilograms of uncooked steroid powder, 23.8 liters of uncooked steroid injectable liquid, 16 weapons, and greater than $285,000. As authorities all over the world wrestle to deal with encrypted platforms, the stakes are high. In a country like Ukraine, where democracy stays fragile, the prospect of delicate information being used to target political dissidents is more than a hypothetical.
Anabolic steroids are controlled substances in Canada and aren’t legal for possession or use without a legitimate prescription. In Accordance to reviews, anabolic steroids are illegal as a result of they’re thought of «Controlled Substances» and as such, it is unlawful to fabricate, import, export, or sell these substances. Canadian Forces members aren’t exempt from this legislation and that is further reiterated within the Canadian Forces Drug Control Program as outlined in CFAO 19-21. And, it could pose vital well being dangers while ruining your status and getting you banned from competitions—for life. Your muscle features using HGH will heavily rely upon which (if any) anabolic steroids you stack it with, as that is the commonest strategy.
This, combined with the increasing reputation of bodybuilding without steroids (https://enah.edu.mx/css/pgs/?hgh_cycles_for_beginners.html) on the time, is doubtless certainly one of the direct outcomes of in depth media protection at the time. Like anabolic steroids, Human Growth Hormone (HGH) can additionally be categorised as a Schedule IV substance in Canada. This implies that HGH is authorized to own for personal use however unlawful to distribute and not using a prescription. HGH is a powerful hormone that may have critical unwanted aspect effects when misused, and as such, the Canadian government closely regulates its sale and distribution.
A person’s coaching and food regimen are additionally crucial in figuring out results. Though not the most powerful of steroids, Deca is commonly utilized by bodybuilders to reinforce the gains from other bulking steroids. We discover that Testo-Max is best utilized in bulking cycles, maximizing testosterone levels and mass acquire. However, it’s also an effective slicing steroid, serving to to extend fats burning whereas sparing muscle dimension. Let’s study more into the possession versus sale of anabolic steroids and the way the courts approach both expenses differently. It may end up in a nice of $500,000 and round ten years in prison.
Just like HGH, Anavar has a direct impact on the metabolism, and this interprets to powerful fats burning. Anavar is a really fast-working steroid, and it’s likely to result in sooner and bigger muscle features in women using it for that objective. It can be only used for 6 to eight weeks, whereas you’re looking at many months of HGH use to get acceptable results. Trenbolone is maybe probably the most superior anabolic steroid one can use, so it should also be included in any superior cycle with HGH. If you’re taking doses of 8iu or more, splitting it into two day by day injections is not unusual. Keep Away From injecting within the hours earlier than sleeping because that could presumably be a time when your physique is ramping up its pure development hormone production. I prefer to inject after breakfast (after consuming some carbs) – this might help keep away from fatigue or drowsiness.
Trenbolone is also a robust fat-burning steroid and is thus sometimes utilized in chopping cycles too. Nevertheless, when it comes to pure muscle acquire, we rank trenbolone among the many best bulking franco columbu Steroids (http://www.weyher.de/wp-includes/inc/winstrol_kaufen_2.html). Trenbolone is a really powerful injectable steroid that produces massive will increase in lean muscle.
Keep the following pointers helpful for future purchases or to assist a good friend find suggestions. The twin motion of steroids for muscle growth and masculinizing results both spotlight their strength as properly as their extensive impression on the body. It is these complicated maneuvers that make the steroids interesting for medication as a potential therapeutic software, but additionally fascinating in them as a result of their significant position inside sports and bodybuilding. Many athletes and bodybuilders use steroids to spice up their energy and efficiency. This can lead to more effective workouts and the power to lift heavier weights.
Whatever the case may be, whether or not you’re an skilled user or somebody new to this treatment, understanding the pricing choices and the place to buy Anavar online is necessary. Order tracking didn’t update till about two days away from supply. We sincerely hope to offer you a smoother experience on your subsequent orders.
They are comparatively protected to make use of with a a lot higher efficiency than oral steroids. Injectable steroid use is also nice for preventing and combating common bodybuilding injuries like bursitis, CTS, and decrease back pain. The dose of unlawful anabolic steroids is 10 to 100 instances higher than the dose a physician prescribes for medical problems. Individuals often use a couple of of those unlawful medicine at the similar time. Or they might take the medication in a cycle from no drug to a excessive dose over a interval of weeks to months. Corticosteroids for these related illnesses and anabolic steroids stimulate muscle development and athletic efficiency. If you’re in search of the best quality anabolic steroids online in Canada for the lowest worth then attempt us right now, you have discovered the best place to purchase steroids in Canada.
The stacked steroids will normally be added to the second half of your cycle. HGH is an excellent, supportive, and synergistic hormone to make use of with steroids due to the excellent synergy they have and differing mechanisms of motion. HGH will enhance and construct upon the results of steroids, helping you to get much more out of a cycle. It can come as a surprise that Anavar, for women, regardless of being a steroid hormone, could cause fewer unwanted side effects than HGH. At low doses, many women can keep away from virilizing side effects with Anavar.
It is well value stating that girls don’t have to fret about masculine traits creating when using HGH, as is the case with anabolic steroids. Water retention and swelling are unwanted facet effects many anabolic steroid customers will be familiar with. The wrists and ankles are most commonly affected by water retention, leading to a noticeable swelling of these areas, which can hamper your motion. Testosterone will improve muscle mass, reduce fat, and substantially improve recovery. Gains of 20 lbs are attainable, and water retention should be controllable through food plan (low sodium).
Oral anabolic steroids are some of the in style drugs for novices, out there in a handy form of tablets. Steroids of the oral type are benign medication which have a average effect on clenbuterol dosage for weight loss the athlete’s body. Side effects and different unfavorable reactions are easily avoided when you take oral steroids based on the directions and don’t exceed the prescribed dosage. Such anabolic steroids tablets are fairly efficient, nonetheless, this is applicable solely to high-quality pharma. In addition, in our on-line retailer you should buy numerous drugs for the passage of post-course remedy (PCT). This process requires any athlete who takes anabolic steroids to guarantee that the outcomes from their admission to be recorded, in addition to to revive the body.
Turinabol features lean muscle steadily but surely with minimal estrogenic exercise. It won’t ever bloat, and that is why anyone who wants a dry bulk likes it. Extraordinarily in style among bulks because of its rapid muscle achieve kind of nature. Estrogenic by nature however to a particularly negligible stage; if used properly, it is extremely excessive on the efficiency vs safety graph. An Anavar authorized alternative to weight reduction slimming-down phases along with the upkeep of lean muscular tissues in the process. Steroids like Clenbuterol enhance metabolism and fats oxidation while preserving lean muscle, helping users achieve a shredded, outlined physique. Common blood work, monitoring testosterone levels, and scheduling check-ups can help you notice any points early.
The means of injecting trenbolone additionally has the potential to cause paralysis when carried out by a non-physician. We have found methyltrienolone (oral trenbolone) to be exceptionally potent and equally toxic. This trio was as soon as hailed by Wealthy Piana as his «best-ever cycle» when it comes to anabolism. Wealthy also warned that it should only be used sparingly, with it being a really poisonous and potentially dangerous cycle. This can additionally be what we see anecdotally, and thus we warn our readers from using such a stack.
People know what this steroid does; in spite of everything, it’s been utilized by bodybuilders for more than 50 years. Many of the positive reviews and experiences you’ll hear from Deca-Durabolin customers relate to its therapeutic and therapeutic results. With less muscle and joint pain to take care of throughout and after exercises, plus increased bone power, you will find it simpler to extend your most weight and recuperate faster. Not Directly, this results in quicker gains and the flexibility to have much less of a break for recovery between every exercise. The advantage of gaining any energy is that you will be pushing your maximum lifts larger for quicker gains. With Deca-Durabolin’s ability to strengthen joints and speed up restoration, you should have the ability to cut down that time between working every muscle group by a day or two.
Winstrol’s results are much like Anavar’s, permitting users to cut back fat mass while including moderate quantities of muscle tissue. Nevertheless, it is equally efficient by method of its capability to build muscle tissue. One notable distinction is that customers regularly keep muscle measurement after they discontinue trenbolone, whereas they typically lose intracellular water after they discontinue Dianabol or Anadrol. Superior https://byizea.fr/js/pgs/?acheter_de_la_testosterone_2.html customers can eat dosages that exceed a hundred mg per day; nevertheless, this presents high levels of toxicity. Dianabol has a very negative impact on cholesterol, probably inflicting atherosclerosis. The primary causes of Dianabol’s cardiotoxicity are water retention and the stimulation of the hepatic lipase enzyme within the liver.
Gynecomastia is a priority when cycling testosterone due to its excessive aromatization, meaning a significant amount of exogenous testosterone will convert into estrogen. Although not deleterious in nature, manboobs can have a adverse psychological influence in addition to being bodily undesirable for some customers. We notice androgenic unwanted effects occurring on Winstrol; thus, some hair thinning or discount on the scalp is possible, plus pimples in genetically predisposed individuals. Giant muscular tissues are one of the best place to inject this steroid to keep away from veins and arteries. Quads, glutes, and delts are the recommended injection areas, and they want to be rotated so you enable every injection site to recover. Testosterone Enanthate may be slightly painful as a result of it’s in sesame oil. Private use is allowed, as is importing and exporting of Testosterone Enanthate and all other AAS for personal use in particular person ONLY.
Despite its efficiency and the truth that most females will look at utilizing Anavar and even testosterone instead, Anadrol is a reasonably tolerable steroid for women. Taking more than 50mg will give most of us a noticeable decrease in urge for food. This may be where you’ll reduce the dose or not wish to take it any larger – you wish to preserve your target intake of energy each day to make it worth using Anadrol. Keep In Mind that steroid utilization should not compromise your overall health and well-being.
You may use Sustanon when you prefer on this cycle or your personal alternative of testosterone, but I suggest a fast ester if utilizing injectables. This is a really advanced stack (both Tren and Anadrol could be considered two of the most potent AAS, together with their sides). Anadrol is only used for the first three weeks, after which Trenbolone will assist dry out a few of that water weight. Many individuals will swear by solely using Anadrol with a testosterone base, but utilizing it alone is also a viable choice. When used for anemia (due to Anadrol’s capacity to increase red blood cells), Anadrol is often dosed primarily based on physique weight, with 1mg to 2mg per kilogram being the usual. At 1-2 mg/kg/day, this may find yourself in fairly high doses that rival people who bodybuilders use, and thus, unwanted effects can be expected.
This cycle combines a milder anabolic and a harsh one, but it produces helpful outcomes in phrases of anabolism and decreased fat mass. It was believed to have been used in the course of the Golden Era of bodybuilding. Primobolan doesn’t aromatize, so gynecomastia or water retention are unlikely to be an issue. Primobolan is considerably androgenic (roughly half of testosterone), so oily skin, acne, and hair loss are attainable. This is as a result of of aromatizing compounds obscuring Equipoise’s positive results on muscle definition. In our testing, trenbolone is not notably liver poisonous (being an injectable steroid).
With a brief half-life, if virilization starts creating, you can give up and have that steroid exit your physique relatively shortly. NPP is a much faster-acting ester of Nandrolone and will kick off your cycle very nicely. It’s nonetheless typically run for 16 weeks simply because Nandrolone will provide you with slower and steadier features than one thing like Dianabol. Deca is a long-acting ester that can take some time to kick into your cycle. Suppose four, 5, or even six weeks; that is why we often use Dianabol or another quick kickstarter stacked with Deca. Nandrolone’s benefits are legendary, and that’s the reason we maintain going again to this AAS.
As with other OTC dietary supplements, look out for added ingredients that may cause allergic reactions or long-term health effects. Nevertheless, it doesn’t outcome within the muscle-building claims this drug’s marketing copy would possibly lead you to consider. Creatine is probably one of the most well-known performance assist options. It’s a naturally occurring substance found in foods like fish and meat. Some legal supplements do have science on their facet and aren’t totally unsafe. At OrderSteroids.ca, we only stock the highest high quality merchandise that have gone through rigorous testing. You can trust us to deliver your selected products securely and promptly to your doorstep.
Human Growth Hormone (HGH) is amongst the most important and helpful hormones within the human physique. Additionally often recognized as Somatotropin, HGH is responsible for many processes in our development and growth, including the stimulation of IGF-1 (Insulin-like development factor 1). It can be some of the useful to the bodybuilder and athlete. High doses don’t all the time yield better outcomes — they just improve aspect impact severity.
When stacked with anabolic steroids — which are inherently suppressive — this creates a double hit to the HPTA (hypothalamic-pituitary-testicular axis). Injectable steroids are artificial forms of hormones (mainly testosterone) that are administered via intramuscular (IM) injection. These steroids are generally used in medication to deal with situations like hormone deficiencies and muscle-wasting diseases, but they are also misused by bodybuilders and athletes for performance enhancement. You need to know https://la-loi-de-la-gourmandise.fr/wp-content/pgs/meilleur_bruleur_de_graisse.html you would possibly be doing and take the correct details about anabolic steroids products when it comes to health.
However, when taken inappropriately, steroids may cause serious health issues and are illegal in most nations. When you purchase steroids for slicing stack, consider your goals and experience stage. If you’re new to steroids, begin with a natural legal various to ensure safety and compliance. Free transport is included on all orders over $99 inside Canada and we proudly provide leading customer support.Order Steroids Canada is the best place on-line to buy steroids as properly as SARMS. Shop for steroids with bulk discount coupons out there for orders over $1500 as nicely as 20% coupon codes for first time patrons. At USA Elite Steroids, we’re devoted to revolutionizing your fitness journey with our premium quality merchandise and unparalleled customer support.
Products are often misrepresented, and their safety is not assured. Federal agents report that many underground steroid labs are extremely unsanitary, with big quantities of uncooked supplies being mixed in bathtubs and bathroom sinks. Many famous athletes admit that their profession achievements could be much decrease if they did not have access to anabolic and androgenic steroids. When anabolic and androgenic steroids buy are developed, the androgenic exercise is often artificially understated as a outcome of it has the potential to lead to the development of suitable (androgenic) unwanted aspect effects. Both oral and injectable steroids are straightforward to buy from our shop.
Anyone can find steroids for sale which are perfect for his or her objectives, no matter where they stay. All of these, as nicely as many different types of injectable anabolic steroids, you’ll find in our online store at an excellent value. So, you want to use them smartly with protections and really helpful cycles and doses. Get your free steroid cycle advice from our coach to achieve your bodybuilding targets.
If you’re critical about doing it proper, defend your physique, run your labs, and let outcomes and recovery drive your decision-making — not ego. For 95% of users, particularly novices and intermediates, the base compound must be testosterone. The medication may be taken by mouth, injected right into a muscle, or utilized to pores and skin as a gel or in a patch. FDA OCI was first notified by one other agency a couple of criticism related to Rat’s Military. Steroids work by binding to androgen receptors in muscle cells, which triggers a cascade of biological processes.
Some will develop carpal tunnel syndrome, where a nerve that goes into the hand is compressed because of swelling. This can cause tingling and numbness in the fingers, pain, and hand weak point. HGH is known to trigger water retention, with the wrists being a common drawback space. Since we almost at all times use HGH for efficiency functions alongside suppressive compounds like AAS, you’ll nearly inevitably have to plan a PCT cycle anyway – it just won’t have something to do along with your use of HGH.
You said it well!
This is the right web site for everyone who wishes to understand this topic.
You realize a whole lot its almost hard to argue with you (not that
I personally would want to?HaHa). You definitely
put a new spin on a subject that’s been written about for a long time.
Wonderful stuff, just great!
my blog :: http://carmouche.com/__media__/js/netsoltrademark.php?d=www.andreadanahe.com/7-thing-i-like-about-high-stakes-poker-however-three-is-my-favourite/
Also visit my blog :: highstake
Hey there this is somewhat of off topicc but I was wanting tto know if blogs
use WYSIWYG editors or if you have too manually code with HTML.
I’m sttarting a blog soon bbut have no coding knowledge so I wanted to get guisance from someone with experience.
Any help would be enormously appreciated!
Feel free to visit my page :: kaca mobil chery
Here is my site poker High stakes
Have a look at my blog … high Stakes Poker app
70918248
References:
are steroids legal in germany [https://lakestarrsolutionsllc.com/page20.php?messagePage=7459]
Дома и гостевые коттеджи в Гаграх для комфортного отдыха
гагры отдых цены otdyh-gagry.ru .
Full hd film izlerken zamanın nasıl geçtiğini unutacaksınız
4k izle 4k izle .
Need transportation? car shipping companies car transportation company services — from one car to large lots. Delivery to new owners, between cities. Safety, accuracy, licenses and experience over 10 years.
Also visit my site :: watch free poker tv shows
Удобство, доступность и эффективность: преимущества нарколога на дому
врач нарколог выезд на дом цена http://www.clinic-narkolog24.ru .
70918248
References:
Bad Effects Of Steroids (https://crossriver.ca/service/acmg-hiking-guide/)
70918248
References:
women and steroids; https://deesreview.com/casual-fashion/,
70918248
References:
steroid Side effects in women (https://guardian.ge/65787-ukraine-war-putin-preparing-for-long-haul-us-intelligence-says.html)
70918248
References:
dianobol 10 — https://freevisitorcounter.net/berapa-spin-yang-dibutuhkan-untuk-mendapatkan-blazing-flash-skyboard-free-fire-ff-esportsku/,
70918248
References:
where to buy steriods; https://galaxyslotsonline.uk/the-origins-of-dead-canary-slots/,
70918248
References:
legal steroids weight loss; https://expectacao.projetocimm.com/o-cinema-de-impacto-social-em-alagoas/,
70918248
References:
First steroid cycle Before and after photos (https://discuae.com/all-courses/php-beginners-become-a-php-master-2/)
Please let me know if you’re looking for a author for your weblog.
You have some really good articles and I think I would be
a good asset. If you ever want to take some of the load off, I’d absolutely love to write some content for your blog in exchange for a link back
to mine. Please blast me an e-mail if interested. Cheers!
Выбирайте и заказывайте алкоголь онлайн — доставка уже едет к вам
алкоголь купить круглосуточно с доставкой купить алкоголь с доставкой 24 часа москва .
70918248
References:
anabolic steroids dangers, https://maspackaging.com/exploring-new-horizons-adventures-await/,
Greate article. Keеp writing such kіnd of information on yоur site.
Im гeally impressed Ьy it.
Нi theгe, You have done an incredible job. I’ll dеfinitely digg it
ɑnd individually recommend tо mү friends. I аm confident thеy wіll Ьe benefited from tһis web site.
Als᧐ visit my website … best social casinos
70918248
References:
https://www.nagasakiwagyu.com/174
70918248
References:
https://mdai.aq.upm.es/blog/taller-de-interiores-sostenibles-2021?page=5398
70918248
References:
steroids meaning and side effects (https://galaxyslotsonline.uk/strategies-for-coin-strike-hold-win-slots/)
70918248
References:
side effects of steroids in men (https://www.cifradue.it/property/appartamento-in-villa-via-parrocchiale-3-centro-besana-in-brianza-2/)
70918248
References:
http://www.tsf.edu.pl/nowa-ksiazka-radoslawa-brzozowskiego/
70918248
References:
side effects of using steroids [http://mutuelle-de-sante.fr/the-importance-of-building-a-strong-brand-identity?unapproved=35618&moderation-hash=dd9073034099f1448019a719455d5835]
70918248
References:
safest steroid pill (https://pulsezenx.com/everything-you-need-to-know-about-the-new-zealand-visitor-visa/)
70918248
References:
benefits of steroids In medicine — https://maacdunlop.com/how-to-build-career-in-2d-3d-animation-in-2023/,
70918248
References:
buy legit steroids (https://happyquills.com/5-most-beautiful-islands-in-asia/)
70918248
References:
https://traveesindia.com/product/manali-weekend-tour-04n-05d/
70918248
References:
https://minhabandeira.ro/de-ce-este-important-sa-utilizati-o-casca-tactica-airsoft/
70918248
References:
buying real steroids online (https://galuhnunatanews.com/2024/07/rupiah-kembali-bertenaga-pasar-manfaatkan-momentum-positif/)
70918248
References:
steroids effects on women (http://www.restgarage.jp/blog.php?aidx=136661)
Профессиональное https://kosmetologicheskoe-oborudovanie-msk.ru для салонов красоты, клиник и частных мастеров. Аппараты для чистки, омоложения, лазерной эпиляции, лифтинга и ухода за кожей.
70918248
References:
https://mathgiri.com/%e0%a4%b8%e0%a5%88%e0%a4%82%e0%a4%aa%e0%a4%b2-%e0%a4%aa%e0%a5%87%e0%a4%aa%e0%a4%b0-sample-paper/
70918248
References:
medical uses of steroids, https://airconditioningrepairdallastx.com/hello-world/,
70918248
References:
anabolic process definition (https://healthkart.com.au/fitness-tips-the-15-most-important-exercises-for-men/)
70918248
References:
human growth hormone steroid (https://www.regiaimmobiliare.com/2017/06/12/another-image-post-format/)
70918248
References:
ronnie coleman steroids cycle — https://rivercityramble.stlouligans.com/river-city-ramble-podcast-episode-124-battle-of-the-citys/,
70918248
References:
are steroids illegal? (https://www.diitedu.com/singleblog/why-choose-cloud-computing-as-a-career)
Бокалы для вина в скандинавском стиле — лёгкость и простота
бокал под вино bokaly-dlya-vina.neocities.org .
70918248
References:
d ball steroid side effects (https://www.jjrosmediacion.com/etiam-bibendum-elit-eget-erat/)
My page — Watch Free Poker TV Shows
70918248
References:
i want to take steroids (http://florence.boignard.free.fr/cms/spip.php?article69)
70918248
References:
https://www.petrasuzanna-camino.blog/2023/08/26/santiago-the-destination-20th-august/
70918248
References:
buy oral steriods (https://mydigitalboss.com/how-facebook-ads-can-generate-leads-for-your-business/)
70918248
References:
are there any legal steroids, https://bitpoll.mafiasi.de/poll/HsN1SpUrNI/,
70918248
References:
steroid tablets for sale (https://junko-kaneko.com/leport/377/)
70918248
References:
best oral anabolic steroid (https://rumwellpark.com/dignissim-sodales/)
70918248
References:
best steroid for cutting (https://www.airkeyhub.com/2023/04/09/get-ahead-of-your-competition-our-proven-digital/)
70918248
References:
buy steroids pills (https://www.fundamentale.ro/cum-sa-organizezi-o-cina-festiva-de-craciun)
70918248
References:
ripped without steroids (https://medicalcbd.com.co/producto/extracto-de-cbd-andino/)
70918248
References:
oral anabolic steroids for sale (https://erhvervsklubfyn.dk/medlem/geopartner-landinspektoerer-a-s/)
70918248
References:
legal steroids alternatives [https://myc2g.net/2023/12/26/tiny-scientists-on-the-loose-preschool-science-wonders/]
70918248
References:
which is not a consequence of long-term steroid use? — https://www.satubenih.org/?p=1689,
70918248
References:
arnold Schwarzenegger steroid cycle (https://legit.de/aca-900-jira-software-essentials/)
70918248
References:
anabolic steroids bodybuilders (https://lasoledad.mx/2017/11/19/delicious-turkish-coffee-available-now/)
70918248
References:
how long does it take to get big on steroids (https://docmaisdoc.com.br/language-learning-tips-for-beginners-start-speaking-fluently/)
70918248
References:
steroids For height; https://www.tassarnasfavorit.se/39891344_2021831034796734_211226487322312704_n/,
70918248
References:
which describes a consequence of steriod abuse?, https://mealpe.app/mealpe-app-pre-ordering-food-ordering-universities/,
Thankfulness to my father who shared with me on the topic of this web site,
this blog is genuinely amazing.
70918248
References:
winstrol steroids (https://forum.fidetec.com/samsung-a04-a045f-os13-u3-autopatch-firmware-ng-fix-reset-no-network-lost/)
70918248
References:
do steroids make you lose weight (https://www.stmsoccer.com/2023/11/29/take-home-the-stm-s-c-fmfooty-3v3-winter-cup/)
70918248
References:
https://smait-ulilalbabbatam.sch.id/mengintegrasikan-teknologi-dalam-pembelajaran-bahasa-inggris-dengan-teachcast-di-smait-ulil-albab-batam-mewujudkan-pembelajaran-interaktif-dan-inovatif/
70918248
References:
Quality Steroids (https://www.villa-schneider.de/Joomla2/index.php?option=com_phocaguestbook&view=phocaguestbook&id=1&Itemid=55&t=1099380&t=1603100)
70918248
References:
long term effects of anabolic steroids (https://abbet88.com/ezcasino/)
70918248
References:
Bodybuilding Steroids use (https://fenistore.cl/producto/ampolleta-led-st64-filamento-e27-8w-2700k/)
70918248
References:
dangers of steroid Use [https://www.fikrethasiripi.com/soru-sor-cevaplansin/]
70918248
References:
mike rashid steroids (https://artigofeed.com/pastor-atribui-depressao-de-padre-fabio-de-melo-ao-medo-de-sair-do-armario/)
70918248
References:
steroids positive effects (https://stouffvillebaseball.com/call-for-volunteers-for-vacant-board-of-directors-position/)
70918248
References:
chemical muscle enhancement (https://www.cristina-torrecilla.com/2023/11/16/elevador-global-360/)
Императорский фарфор: всё о коллекциях, материалах и уходе
лфз фарфоровый завод официальный сайт цены интернет магазин лфз фарфоровый завод официальный сайт цены интернет магазин .
70918248
References:
None (https://theshca.org.uk/rakshbandhan)
70918248
References:
none — https://riv.ve/altamira-chacao-oficina-en-alquiler-mc-24-009/,
70918248
References:
none (https://aryanlandmark.com/why-you-should-choose-integrated-township-over-apartment-flats/)
70918248
References:
none — http://bertrandwillems.be/parmi-mes-clients/logo-arebs/ —
70918248
References:
none (https://nhcosmetics.net/project/expetendis-voluptatum/)
70918248
References:
None (https://ugi.tn/2023/09/25/solar-power-in-developing-nations-brightening-lives/)
70918248
References:
none (https://stratagemsolutionsllc.com/2023/04/09/digital-marketing-made-easy-let-our-team-handle/)
70918248
References:
None (https://zenolytix.com/top-4-website-speed-test-tools-you-should-be-using/)
70918248
References:
intercasino download (https://learnblockchain101.com/2024/01/what-is-the-immersive-web-a-beginners-guide/)
70918248
References:
None (http://www.swinarski.org/page1.php)
70918248
References:
None; https://kalabiotech.com/?p=8967,
70918248
References:
none — https://xorcoins.com/index.php/2023/04/09/get-ahead-of-your-competition-our-proven-digital/,
70918248
References:
none (https://giftofcarers.org/2024/09/06/save-the-earth/)
70918248
References:
roulette win strategy (https://healthaturkey.com/how-social-media-challenges-are-transforming-fitness-trends/)
70918248
References:
where is winstar casino (https://www.semanariotiempo.cl/un-millon-de-gallinas-ponedoras-e-inversion-de-us30-millones-en-nuevo-plantel-fundo-pachingo-de-avicola-santa-elvira/)
70918248
References:
none [https://www.autocityist.com/2025/03/01/creating-an-article-of-that-length-and-detail/]
This design is incredible! You definitely know how to keep a reader amused.
Between your wit and your videos, I was almost moved to start my own blog (well, almost…HaHa!)
Wonderful job. I really loved what you had to say, and more than that, how you presented it.
Too cool!
Good day! Do you use Twitter? I’d like to follow you if that would be okay.
I’m definitely enjoying your blog and look forward to new posts.
займы онлайн без проверок взять онлайн займ на карту
Услуги клининга с прозрачным прайсом и без скрытых платежей
служба клининга https://www.kliningovaya-kompaniya10.ru/ .
Hi there! I just wish to give you a huge thumbs up for the
excellent information you’ve got here on this post.
I will be coming back to your poker site rankings for
more soon.
all the time i used to read smaller articles or reviews which as
well clear their motive, and that is also happening with this post which I am reading here.
Good day very nice website!! Guyy .. Beautiful ..
Wonderful .. I will bookmark your site and take the feeds
additionally? I’m glad to find a lot of useful information right here in thhe put up, we’d like work out
extra techniques in this regard, thank you for sharing.
. . . . .
my blog post :: Extended Wear Contact Lenses
I had a great experience with https://liquidashop.cloud/hello-world/ last month. They showed up on time, finished ahead of schedule, and left the place spotless. If you’re looking for house painters that don’t cut corners, check them out.
I was pretty pleased to uncover this website. I need to to thank you for your time for this wonderful read!!
I definitely loved every little bit of it and i also have you book marked to check out new stuff
on your web site.
I had a great experience with https://burf.co/submit.php?url=https%3A%2F%2Fcookssimplepainting.com%2F last month. They showed up on time, finished ahead of schedule, and left the place spotless. If you’re looking for house painters that don’t cut corners, check them out.
With havin so much content and articles do you ever
run into any problems of plagorism or copyright violation? My blog has a lot of exclusive content I’ve
either written myself or outsourced but it looks like a lot
of it is popping it up all over the web without my authorization. Do
you know any ways to help protect against content from being stolen? I’d certainly appreciate it.
My blog post … Safe Poker Games Online
Обновите автопарк с помощью лизинга: грузовики, фургоны, рефрижераторы
грузовик в лизинг грузовик в лизинг .
Hi all! Ledger Nano helps me avoid disasters.
Ledger Wallet
My blog post :: http://ww17.gordomii.com
Here is my site: Best Online Poker
Простой способ выделиться — закажите печать на футболке
печать на футболке москва печать на футболке москва .
защитный кейс в комплекте http://plastcase.ru
Подбор участка и строительство деревянного дома под ключ в одном пакете
строительство деревянного дома под ключ цена derevyannye-doma-pod-klyuch-msk0.ru .
реферат купить онлайн https://referatymehanika.ru
Feel free to visit my webpage; Live Poker online
Hey! I could have sworn I’ve been to this blog before but
after reading through some of the post I realized it’s
new to me. Anyways, I’m definitely delighted I found it and I’ll be bookmarking and checking back
often!
Great post! We will be linking to this great article on our website.
Keep up the good writing.
займов процентов онлайн https://zajmy-onlajn.ru
Hi there everyone, it’s my first go to see at this website, and post is really fruitful in favor of me, keep up posting these types of posts.
Топ-10 клининговых компаний для уборки. Каждая из этих компаний предлагает уникальные услуги. Следует учитывать несколько важных аспектов при выборе клининговой компании.
Первый аспект, который необходимо учесть, это имидж компании. Вы можете изучить отзывы клиентов, чтобы составить объективное мнение. Не забудьте узнать, имеет ли компания все нужные лицензии и сертификаты.
Второй значимый фактор — это спектр услуг, которые предлагает компания. Некоторые клининговые компании специализируются на уборке коммерческих объектов, другие — на частных домах. Убедитесь, что услуги компании соответствуют вашим ожиданиям.
Третий критерий, который стоит учесть, это стоимость услуг. Обязательно сравните стоимость услуг у разных клининговых компаний, чтобы не переплатить. Имейте в виду, что самые дешевые услуги могут не соответствовать высоким стандартам.
В заключение, тщательно выбирайте клининговую компанию, опираясь на эти критерии. Правильный выбор обеспечит вам качественную уборку и комфорт. Следите за рейтингами и отзывами, чтобы оставаться в курсе лучших предложений на рынке.
клининг в москве рейтинг http://uborka22.ru/ .
For seasonal maintenance of kotelnaya, lots of advice.
контрольная работа по статистике выполнение контрольных работ
Надёжное подстолье для стола на заказ — идеальное решение для любого интерьера
подстолья для столов купить https://www.podstolia-msk.ru/ .
Большой выбор мотоциклов jhl moto с возможностью онлайн-оплаты
продажа jhlmoto https://www.jhlmoto01.ru/ .
Check out my blog … PokerTube — Watch Free Poker Videos & TV Shows
Поверка приборов проводится под контролем специалистов с профильным образованием и опытом более 5 лет. Услуга включает выдачу свидетельства.
Процесс поверки средств измерений играет ключевую роль в поддержании точности измерительных данных. Данный процесс обеспечивает соответствие оборудования установленным нормам и стандартам качества.
Существует несколько этапов поверки, которые включают в себя оценку состояния измерительных приборов. На первом этапе выполняется визуальный осмотр инструментов и выявление возможных неисправностей. В случае несоответствий прибор нужно откалибровать или заменить на другой.
Важно помнить, что поверка средств измерений должна проводиться регулярно для обеспечения их точности. Также следует обращать внимание на сроки поверки, чтобы минимизировать риск получения некорректных данных.
Ежедневный клининг офисов и общественных пространств
клининг в москве https://kliningovaya-kompaniya10.ru .
Лизинг коммерческого транспорта под ключ с оформлением за 24 часа
оборудование для бизнеса в лизинг lizing-auto-top1.ru/oborudovanie .
If you would like to obtain a good deal from this post then you
have to apply these techniques to your won weblog.
Посетите наш сайт и узнайте о клининговые услуги спб цены!
Клининговые услуги в Санкт-Петербурге набирают популярность. С каждым годом увеличивается количество компаний, предоставляющих разнообразные услуги по уборке.
Заказчики высоко оценивают качество и доступность клининговых услуг. Команды клининговых компаний зачастую предлагают персонализированный подход к каждому клиенту, учитывая его потребности.
В спектр клининговых услуг входят как плановые уборки, так и одноразовые мероприятия
Wonderful blog! I found it while surfing around on Yahoo News.
Do you have any suggestions on how to get listed in Yahoo News?
I’ve been trying for a while but I never seem
to get there! Many thanks
I have been exploring for a little for any high-quality articles or weblog posts in this kind of house .
Exploring in Yahoo I ultimately stumbled upon this website.
Studying this info So i’m happy to express that I’ve an incredibly excellent uncanny feeling I
discovered exactly what I needed. I so much without a doubt will make sure
to don?t omit this web site and provides it a glance regularly.
Удачные проекты деревянных домов под ключ для узких или сложных участков
деревянный дом под ключ http://www.derevyannye-doma-pod-klyuch-msk0.ru .
With Jupiter’s recent UI upgrade, swaps are faster than ever. How do you like the new interface?
Jup Swap USA
Все клининговые услуги Москва цены указаны с детализацией по метражу и задачам. Мы учитываем нюансы и всегда действуем по согласованному плану.
Клининг в Москве стал популярной услугой в последние годы. Растущее число москвичей начинает доверять уборку своих объектов профессиональным клининговым компаниям.
Цены на клининг могут варьироваться в зависимости от специфики услуг. Цены на стандартную уборку квартиры в Москве колеблются от 1500 до 5000 рублей.
Клининговые компании предлагают дополнительные услуги, такие как мойка окон и чистка мебели. Эти услуги могут значительно увеличить общую стоимость уборки.
Прежде чем остановиться на конкретной клининговой компании, будет полезно изучить предложения на рынке. Важно учитывать мнения клиентов и репутацию компании.
Все клининговые услуги СПб можно заказать онлайн. Цены прозрачные, сотрудники опытные, результат — безупречный.
Клининг в Санкт-Петербурге становится всё более популярным. В Санкт-Петербурге работают разные компании, которые предлагают услуги клининга. Среди них можно выделить уборку квартир, офисов и коммерческих помещений.
Клиенты часто выбирают клининг для экономии времени. Так они освобождают время для выполнения более важных задач. Услуги клининга идеально подходят для тех, кто ведет активный образ жизни.
Одна из основных причин популярности клининговых компаний – это профессионализм. Специалисты обучены использовать современное оборудование и эффективные моющие средства. Эффективное использование техники дает возможность достигать быстрого и качественного результата.
Клиенты могут выбрать различные пакеты услуг, чтобы удовлетворить свои потребности. Клиенты могут выбирать между разовыми и регулярными клининговыми услугами. Это позволяет выбрать наиболее подходящее предложение каждому клиенту.
This helped me pick a heating scheme for two floors — .
Какой сегодня праздник http://www.inforigin.ru .
Магнитные бури http://www.istoriamashin.ru .
Today, while I was at work, my cousin stole my iPad and tested to see if it can survive a 40 foot drop, just so she can be a youtube sensation. My apple ipad is now
destroyed and she has 83 views. I know this is completely off topic
but I had to share it with someone!
типография печать спб типография
типография дешево типография спб
производство металлических значков заказать металлические значки
металлические значки на заказ изготовление металлических значков
70918248
References:
taking steroids without working out (https://www.pizzeriaramo.se/index.php/2023/05/29/how-to-keep-fear-from-ruining-your-art-business/)
70918248
References:
most effective steroid — https://yourbookrecommendation.in/15-best-books-on-willpower/ —
70918248
References:
steroid drugs, https://happyliving.com.vn/san-pham/chau-rua-bat-nhat-ban-toyoura-n760zwdl-eb/,
70918248
References:
what are androgenic steroids (https://old.newcroplive.com/video/skyrim/)
70918248
References:
safe steroid use for bodybuilding (https://goldenhealthmethod.com/anxiety/niacinamide-for-anxiety-and-depression/)
70918248
References:
anabolic steroids injections; https://informatusa.com/marcas-genericas/,
70918248
References:
celebrities on steroids (http://livingspringfoundation.com.hk/web2.0/modules/webs/)
70918248
References:
anabolic steroid review (http://www.restgarage.jp/blog.php?aidx=137824)
70918248
References:
https://informatusa.com/que-documentos-necesito-para-solicitar-admision-en-una-universidad-estadounidense/
70918248
References:
liquid steroids For sale (https://www.puriasia.com/property/villa-nini-elly/007-villa-nini-elly-his-and-hers-vanity-sink/)
70918248
References:
natural bodybuilding vs steroids pictures (https://happyliving.com.vn/san-pham/phong-tam-kinh-blue-sanitary-axb14x/)
70918248
References:
steroid drug names [https://community.theclearwaytoconceive.com/question/guide-to-best-robot-vacuum-for-large-house-the-intermediate-guide-the-steps-to-best-robot-vacuum-for-large-house/]
Мы доставим вкусно и быстро — заказать роллы доставка СПб работает ежедневно и без выходных.
В последние годы вок-заказ становится всё более востребованным методом доставки еды. Такой способ избавляет от необходимости готовить и позволяет наслаждаться разнообразной кухней.
Существует множество ресторанов, предлагающих вок-заказ. Каждое заведение старается выделиться своим ассортиментом и акциями.
Чтобы сделать правильный выбор, стоит обратить внимание на отзывы. Это позволит выбрать только те рестораны, которые предлагают отличное качество пищи.
Не забывайте также про акции и скидки, которые предлагают многие заведения. Это отличная возможность попробовать новые блюда по более низкой цене.
Идеальный выбор на вечер — доставка роллов в СПб работает без задержек. Все блюда готовим перед отправкой.
Процесс заказа суши не вызывает трудностей. Вы можете оформить заказ различными способами: через интернет, по телефону или в приложении. Каждый из этих способов предлагает определенные плюсы и минусы.
Важно учитывать мнения других клиентов при выборе суши-ресторана. Отзывы могут подсказать, стоит ли заказывать именно там. Так вы сможете избежать возможных неприятных сюрпризов и выбрать заведение с хорошей репутацией.
Проверьте меню заведения, прежде чем сделать заказ. Некоторые рестораны могут радовать вас необычными рецептами и комбинациями. Выбор уникальных и необычных позиций может сделать ваш вечер интереснее.
После оформления заказа не забудьте узнать время доставки. Это поможет вам организовать свой вечер и быть готовым к приезду курьера. Не забудьте проверить, доставляют ли в вашу часть города.
Best resource on boilers and solid fuel options I’ve seen — kotelinaya.ru.
Also visit my web page; Play Poker
карниз с приводом http://www.elektrokarnizy50.ru/ .
thepokies106.net thepokies106.net .
New AI generator ai nsfw of the new generation: artificial intelligence turns text into stylish and realistic image and videos.
Filmizlecc seçeneğimiz, geniş film koleksiyonunu yüksek kalitede izlemek isteyenler için uygundur. Güncel filmler için filmizlecc sayfasını kullanabilirsiniz.
Yayın hizmetleri son birkaç yılda büyük bir popülerlik artışı yaşadı. En büyük trendlerden biri, özellikle Full HD ve 4K formatlarında yüksek kaliteli içeriğe olan talebin artmasıdır. İzleyiciler, netlik ve detayları ön plana çıkaran daha sürükleyici deneyimler istiyor.
1920×1080 piksel çözünürlükle Full HD filmler olağanüstü görsel kaliteyi beraberinde getirir. Büyük ekranlar bu çözünürlüğü gerçekten öne çıkararak detaylı bir izleme deneyimi sunar. Ancak, 4K filmler bu deneyimi daha da ileriye taşıyarak 3840×2160 piksel gibi çok daha yüksek bir çözünürlük sunar.
Tüketici tercihlerine yanıt olarak, yayın platformları artık geniş bir Full HD ve 4K film arşivi sunuyor. Bu sayede izleyiciler en yüksek kalitede yeni çıkanlar ve klasik favorilere erişebiliyor. Bunun yanında, birçok yayın hizmeti yüksek çözünürlüklü formatlara özel orijinal içerik üretimine kaynak ayırıyor.
Kısaca, yayın platformlarında Full HD ve 4K filmlerin artması izleyici zevklerindeki değişimi ortaya koyuyor. Teknolojik gelişmelerle birlikte, izleme deneyimlerimizde daha yenilikçi çözümler görmemiz muhtemeldir. Bu gelişmeler kesinlikle sinema ve ev eğlencesinin geleceğini etkileyecektir.
Ищете качественную платную помощь? Наша платная наркологическая клиника предлагает индивидуальные программы лечения алкоголизма и наркомании в СПб. Гарантируем эффективность и комфорт.
Наркологическая клиника — это место, где люди могут получить профессиональную помощь в борьбе с зависимостями. В учреждении работают опытные врачи и консультанты, которые занимаются лечением зависимостей.
Основной целью наркологической клиники является выявление и лечение проблем, связанных с зависимостями. Комплексный подход к лечению включает как медицинские, так и психологические методы.
Психологическая поддержка играет ключевую роль в процессе восстановления. Это помогает пациентам не только избавиться от физической зависимости, но и предотвратить рецидивы.
Длительность реабилитации варьируется в зависимости от индивидуальных особенностей пациента. Важно помнить, что процесс выздоровления требует времени, но результаты оправдают усилия.
рулонные шторы на пластиковые цена http://elektricheskie-rulonnye-shtory77.ru .
Everything about ventilation, pipe routing, and insulation — found here.
Избегайте неожиданностей при строительстве. Точный проект дома готовый от нас – это детализированные чертежи и спецификации материалов.
Все больше людей обращают внимание на проекты домов при выборе жилья. Правильный выбор проекта дома играет ключевую роль в создании уютного жилого пространства.
Существует множество стилей и разновидностей проектов домов. Каждый сможет подобрать проект, который будет соответствовать его вкусам и потребностям.
Учитывать размеры земельного участка — это первостепенная задача при выборе проекта. Анализировать климатические условия и окружение также следует при выборе проекта.
Современные технологии позволяют создавать уникальные проекты домов. Проекты могут модифицироваться в зависимости от предпочтений и потребностей клиентов.
Чтобы ваш бюджет был под контролем, изучите детальные отдых в абхазии цены на размещение и дополнительные услуги на нашем ресурсе.
Абхазия предлагает чудесные условия для отдыха и незабываемые впечатления. В этой стране моря, гор и сочных зелёных долин возможно найти всё для идеального отдыха.
Многочисленные туристы выбирают Абхазию как идеальное место для отдыха и развлечений. Здесь можно не только отдохнуть на пляже, но и заняться активными видами спорта.
Каждый путешественник сможет найти подходящее место для проживания в Абхазии. Местные рестораны предлагают множество блюд, которые позволят погрузиться в атмосферу страны.
Отдых в Абхазии позволит вам забыть о повседневной рутине и насладиться моментом. Абхазия ждёт вас с открытыми объятиями и множеством новых впечатлений.
Побалуйте себя морской прогулкой по черноморскому побережью — яхты сочи предоставляют отличную возможность расслабиться и зарядиться позитивными эмоциями.
Чартер яхты становится все более популярным среди любителей отдыха. Путешествие на яхте позволяет насладиться красотой природы и расслабиться.
Выбор яхты — важный этап в организации вашего путешествия. Необходимо учитывать тип и размер яхты, чтобы она соответствовала вашим требованиям.
При аренде яхты важно внимательно изучить все пункты договора. Некоторые сервисы предлагают дополнительные услуги, включая услуги профессионального капитана.
Важно правильно спланировать маршрут, чтобы ваш отдых был максимально комфортным. Проведите время в красивейших местах, которые доступны только с воды.
Most sites just copy each other’s boiler descriptions. But kotelinaya.ru offers a personal, structured view: how heating systems perform over time, which fuels make sense, and what real users face during winter. I changed my plans after reading one of their zone-heating breakdowns — and glad I did.
This is the right web site for anybody who would like to
find out about this topic. You understand a whole lot its almost hard
to argue with you (not that I personally would want to?HaHa).
You definitely put a brand new spin on a topic that’s been written about for a long time.
Excellent stuff, just excellent!
Here is my web site; top 10 poker sites
прогноз на спорт на сегодня от профессионалов прогноз на спорт на сегодня от профессионалов .
Наркология Санкт-Петербург – это возможность получить квалифицированную помощь при любом виде химической зависимости. Анонимно, эффективно, с гарантией.
Наркологическая клиника — это место, где люди могут получить профессиональную помощь в борьбе с зависимостями. Здесь работают квалифицированные специалисты, готовые помочь каждому пациенту.
Клиника специализируется на лечении различных форм зависимостей, включая алкогольную и наркотическую. Комплексный подход к лечению включает как медицинские, так и психологические методы.
Психологическая поддержка играет ключевую роль в процессе восстановления. Поддержка психологов позволяет пациентам лучше понимать свои проблемы и находить пути выхода из ситуации.
Процесс реабилитации может занять различное время, в зависимости от сложности случая. Несмотря на сложности, победа над зависимостью крайне ценна.
As the admin of this website is working, no hesitation very shortly it
will be well-known, due to its feature contents.
Here is my blog post … Lesley
Very nice article, totally what I needed.
супер прогнозы на футбол супер прогнозы на футбол .
прогнозы на хоккей luchshie-prognozy-na-khokkej1.ru .
Продукты последнего поколения для активации мозговой деятельности и усиления концентрации уже в наличии — ноотропы для мозга купить последнего поколения.
Ноотропы представляют собой группу препаратов, способствующих улучшению умственной деятельности. Эти вещества помогают улучшить внимание, увеличить память и общее психоэмоциональное состояние.
Существует множество видов ноотропов, как синтетических, так и природных. Все эти препараты различаются по своим механизму действия и конечным результатам.
Природные ноотропы, такие как женьшень и гинкго билоба, известны своими полезными свойствами. Данные природные ноотропы широко используются в лечебных целях для повышения внимательности и памяти.
Синтетические ноотропы, такие как пирацетам, были разработаны для более целенаправленного воздействия. Эти средства активно используют для терапии различных когнитивных нарушений, например, проблем с памятью.
Откройте для себя идеальный черноморский отдых в уютном курортном поселке. Архипо-Осиповка приглашает на чистые пляжи, вкусную кухню и незабываемые впечатления. Подробнее об актуальных предложениях: архипо осиповка отдых 2025.
Отдых в Архипо-Осиповке — отличный выбор для любителей природы. Сюда часто приезжают туристы, желающие насладиться теплым морем и живописными пейзажами.
Местные пляжи отличаются чистотой и комфортом, что делает их идеальными для семейного отдыха. Купание и водные развлечения делают отдых здесь незабываемым.
В этом курортном поселке можно найти различные варианты жилья на любой вкус и бюджет. Вы можете выбрать как роскошные отели, так и более бюджетные варианты, подходящие для всей семьи.
Местные развлечения порадуют как детей, так и взрослых. Прогулки по набережной, экскурсии и местные фестивали — все это создаст незабываемые впечатления.
Fantastic beat ! I would like to apprentice while you amend your site, how can i subscribe for
a blog website? The account aided me a acceptable deal.
I had been tiny bit acquainted of this your broadcast
provided bright clear concept
Excellent post. I was checking continuously this weblog and I’m impressed! Extremely helpful info specially the final phase 🙂 I care for such information much. I used to be looking for this particular info for a very long time. Thank you and good luck.
Wow, this paragraph is pleasant, my younger sister is analyzing such
things, thus I am going to let know her.
It’s very straightforward to find out any matter on web as compared
to textbooks, as I found this post at this website.
Howdy! This blog post couldn?t be written much better! Reading through this post reminds me of my previous roommate! He continually kept preaching about this. I’ll forward this article to him. Fairly certain he’ll have a good read. I appreciate you for sharing!
купить айфон в питере http://kupit-ajfon-cs1.ru/ .
Unlock extra features and maximize your winning chances with sweet bonanza bonus, offering players vibrant graphics and rewarding possibilities at every turn.
Sweet Bonanza is a popular online slot game that has captured the attention of players worldwide. It offers colorful visuals along with thrilling gameplay that attracts many.
What makes Sweet Bonanza particularly appealing are its distinctive features. With its cascading reels, players can secure multiple victories on each spin.
Moreover, the game offers a free spins feature that enhances the gaming experience. This feature can lead to substantial payouts, making it even more enticing.
Ultimately, Sweet Bonanza proves to be an engaging slot option for enthusiasts. The combination of its eye-catching graphics and generous rewards makes it a top choice for many.
98WIN
Профессиональная https://narkologicheskaya-klinika43.ru. Лечение зависимостей, капельницы, вывод из запоя, реабилитация. Анонимно, круглосуточно, с поддержкой врачей и психологов.
Wow, this piece of writing is pleasant, my sister is analyzing these kinds of things, thus I am going to tell her.
Great info, Many thanks!
I’m not that much of a internet reader to be honest but your sites really nice, keep it up!
I’ll go ahead and bookmark your website to come back later.
All the best
But wanna tell that this is very useful, Thanks for taking your time to write this.
Loving the information on this website, you have done great job on the blog posts.
Оптимальное решение для обслуживания высоких стеллажей. Использование ножничного подъемника в строительстве и на складах.
Ножничные подъемники пользуются высоким спросом в сфере подъемной техники. Такой тип подъемника позволяет безопасно поднимать как людей, так и грузы на значительную высоту.
Одним из ключевых достоинств ножничного подъемника является его компактный размер и высокая маневренность. Компактные размеры этого подъемника позволяют эффективно эксплуатировать его в небольших помещениях и на узких площадках.
Еще одним важным аспектом является возможность регулировки высоты поднятия. Возможность настройки высоты делает их универсальными для различных типов работ.
Ножничные подъемники часто используются в строительстве, на складах и в торговле. Безопасность и легкость в эксплуатации делают ножничные подъемники востребованными на рынке.
карниз с приводом для штор http://elektrokarnizy750.ru/ .
– А, так ты с ним заодно? – впадая в гнев, прокричал Иван. Перевод приложения к диплому: Легко и быстро за границу! Какие же меры вы приняли, чтобы поймать этого убийцу? – тут врач повернулся и бросил взгляд женщине в белом халате, сидящей за столом в сторонке.
Many thanks, Loads of data.
Удобная база суррогатных матерей помогает сделать осознанный выбор. Все профили подтверждены, сопровождение осуществляется с юридическим и психологическим участием.
Суррогатное материнство представляет собой уникальную возможность для пар, которые сталкиваются с трудностями зачатия. Увеличение интереса к суррогатному материнству объясняется изменением общественного мнения и ростом технологий в области репродукции.
Суррогатное материнство делится на два основных типа, каждый из которых имеет свои преимущества и недостатки. При традиционном типе суррогатного материнства суррогатная мама становится биологической матерью, так как используется ее яйцеклетка. В отличие от этого, при гестационном суррогатном материнстве эмбрион создается с использованием яйцеклетки и сперматозоидов намеревающихся родителей.
Важно тщательно обдумать решение о суррогатном материнстве, принимая во внимание различные аспекты. Необходимо учитывать финансовые, юридические и эмоциональные аспекты, которые могут возникнуть в процессе. Важно также выбрать надежное агентство, которое поможет в организации всего процесса.
Суррогатное материнство касается не только медицинских аспектов, но и социальных вопросов. Поддержка и понимание со стороны общества играют важную роль в создании позитивного имиджа этой практики. В итоге, суррогатное материнство предоставляет возможность стать родителями тем, кто не может иметь детей, если это происходит с соблюдением всех необходимых норм и правил.
People talk highly of their clean edges, affordable rates, and fast turnaround. Whether you are prepping for resale, they’ve got you covered.
Admiring the time and energy you put into your site and detailed information you offer.
It’s good to come across a blog every once in a while that isn’t the
same out of date rehashed information. Excellent read! I’ve
bookmarked your site and I’m including your RSS feeds to my Google account.
Please let me know if you’re looking for a author for your site.
You have some really great articles and I
believe I would be a good asset. If you ever want to take some
of the load off, I’d love to write some articles for your blog in exchange for a link
back to mine. Please shoot me an e-mail if interested. Cheers!
Выручили с ДР в последний момент!
букет пионов
Свадебный букет вызвал слезы у всех гостей!
доставка цветов томск
Hello, i read your blog from time to time and i own a similar one and i was just curious if you get a lot of spam feedback?
If so how do you stop it, any plugin or anything you can advise?
I get so much lately it’s driving me mad so any help
is very much appreciated.
This is really interesting, You are a very skilled blogger.
I’ve joined your rss feed and look forward to seeking more of your fantastic post.
Also, I’ve shared your web site in my social networks!
my blog — hepatoburn
What’s up, this weekend is good for me, as this moment
i am reading this fantastic educational paragraph here
at my residence.
facebook account buy buy pre-made account account market
It’s very simple to find out any topic on net as compared to textbooks, as I found this post at this web page.
мирена спираль эффект сколько стоит спираль мирена
Wow all kinds of amazing facts.
типография петербург типография петербург
You actually make it seem really easy along with your presentation however I find this topic to be actually one thing which I feel I might by no means understand. It sort of feels too complicated and extremely extensive for me. I’m looking ahead in your subsequent put up, I will try to get the hold of it!
buy facebook advertising accounts for sale account marketplace
Activate new accounts easily with sms activate and never risk your personal phone. The process is quick, secure, and user-friendly.
Receiving SMS messages is an essential part of modern communication. SMS messages help us maintain connections with loved ones, colleagues, and associates.
In today’s tech-driven world, receiving SMS has evolved into a vital means of communication. Whether it’s for alerts or notifications, SMS fulfills numerous functions.
Despite its benefits, some users may struggle with receiving SMS messages. Factors like connectivity issues, device settings, or technical malfunctions can lead to SMS delivery challenges.
To tackle these problems, individuals should verify their network connectivity and device settings. Regularly updating the software on the device can contribute to better SMS reception.
титульный отчета по практике отчеты по практике студентов
Good shout.
I don’t even understand how I finished up here, but I thought this publish used to be great. I do not know who you’re but certainly you’re going to a famous blogger in the event you are not already. Cheers!
Magnificent goods from you, man. I have understand
your stuff previous to and you’re just too fantastic.
I actually like what you have acquired here,
really like what you’re saying and the way in which you say it.
You make it entertaining and you still take care of to keep it wise.
I can not wait to read much more from you. This is really a wonderful website.
Oh my goodness! Incredible article dude! Thank you, However I am going through issues with your
RSS. I don’t understand the reason why I can’t subscribe to it.
Is there anybody getting similar RSS problems? Anyone that knows the answer will you kindly respond?
Thanks!!
Hi friends, its fantastic paragraph about teachingand fully defined, keep
it up all the time.
Very good information. Lucky me I ran across
your site by chance (stumbleupon). I’ve book-marked it for later!
Мини-розы в горшочке — мило и практично, продолжают радовать!
купить букет роз томск
Hiya very cool website!! Guy .. Beautiful .. Amazing .. I will
bookmark your website and take the feeds additionally?
I am happy to seek out a lot of useful info right here within the publish, we want
develop more strategies in this regard, thank you for sharing.
. . . . .
betflikone Earn free spins, cashbacks, and exclusive bonuses every day. New users enjoy welcome packages with low wagering terms
Превзошли все ожидания!
букет невесты
melbet скачать apk melbet скачать apk
Настоящие маги флористики!
доставка цветов
Hey this is kinda of off topic but I was wondering if blogs use WYSIWYG editors
or if you have to manually code with HTML. I’m starting a blog
soon but have no coding experience so I wanted to get advice from someone with experience.
Any help would be greatly appreciated!
lava1688 Step into the world of real-time gaming with live baccarat, roulette, blackjack, and more. Streamed in HD with professional dealers—you get the full casino feel without leaving home.
supports auto deposit and withdrawal, compatible with Thai bank apps and TrueMoney Wallet. Fast, safe, and no delays.
betflix365 Play your favorite games anytime, anywhere. The site works smoothly on iOS, Android, and all major browsers.
betflik93 Spin your way through popular slots like Sweet Bonanza, Roma Legacy, and Fortune Rabbit. Enjoy exciting themes, bonus rounds, and big win potential on every spin.
DB
thc gummies for anxiety area 52
buy pre rolls online area 52
best sativa thc edibles area 52
PG
mood thc gummies area 52
sleep gummies area 52
thc oil area 52
live resin carts area 52
infused pre rolls area 52
thcv gummies area 52
best disposable vaporizers area 52
thc pen area 52
magic mushrooms for sale area 52
weed pen area 52
best indica thc weed pens area 52
thca diamonds area 52
thc tinctures area 52
thc gummies
thca gummies area 52
best thca area 52
thca disposable area 52
hybrid gummies area 52
betflix2u ความมั่นคง ปลอดภัย คือหัวใจของเว็บตรง
สิ่งที่ทำให้ผู้เล่นไว้วางใจ pgslot มากที่สุดคือ “ความโปร่งใส” ไม่ว่าจะเป็นการจ่ายรางวัล การฝากถอน หรือระบบซัพพอร์ตลูกค้า ทุกอย่างดำเนินการผ่านระบบอัตโนมัติที่เชื่อถือได้ ไม่มีโกง ไม่มีปิดเว็บหนี เหมาะสำหรับทั้งผู้เล่นมือใหม่และมือโปร
Букет с розами и эустомой — нежное сочетание, флорист — гений!
розы томскрозы в Томске
betflikone is offshore‑licensed; Thai law restricts local operators, so play is at individual discretion
Узнайте больше о строительстве каркасных домов в санкт петербурге, включая сроки, стоимость и комплектацию. Консультация бесплатна.
В последнее время каркасные дома привлекают всё больше внимания среди людей, желающих построить жильё. Такие дома имеют ряд преимуществ, таких как скорость строительства и высокая энергоэффективность.
Основным преимуществом каркасных конструкций является их доступная цена. С помощью каркасных технологий можно минимизировать расходы на материалы и рабочую силу.
Каркасные конструкции позволяют легко подстраиваться под изменяющиеся климатические условия. С их помощью вы сможете создать комфортное жильё как в холодных, так и в тёплых регионах.
Тем не менее, каркасные дома не лишены недостатков, о которых стоит помнить. Одним из минусов каркасных домов является их меньшая пожарная безопасность по сравнению с традиционными кирпичными постройками. Эти факторы стоит учитывать, принимая решение о строительстве.
Thanks for the good writeup. It in truth used to be a leisure account it.
Look advanced to far brought agreeable from you! By the way, how
can we be in contact?
Более того, один московский врун рассказывал, что якобы вот во втором этаже, в круглом зале с колоннами, знаменитый писатель читал отрывки из «Горя от ума» этой самой тетке, раскинувшейся на софе. Москитные сетки в Москве: виды, цены и способы заказа Ремонт окон в Москве – Просто он существовал, и больше ничего.
Using the plumbing repair instructions on rjadom.ru, I saved time and money by fixing leaks myself.
Заказать дипломную работу http://diplomikon.ru недорого и без стресса. Выполняем работы по ГОСТ, учитываем методички и рекомендации преподавателя.
Букет пришел свежий и ароматный, доставили точно в указанное время — спасибо!
доставка цветов в томске
Spot on with this write-up, I really feel this amazing site needs a great deal more attention. I’ll probably be
returning to read more, thanks for the advice!
Свежесть в лепестках!
доставка цветов
изготовление лестниц на металлическом каркасе в москве lestnicy-na-metallokarkase-4.ru .
The window sealing guide from rjadom.ru was easy to follow and helped reduce drafts during the cold months significantly.
Hi, I do believe this is a great web site. I stumbledupon it 😉
I may come back yet again since I book marked it.
Money and freedom is the greatest way to change, may you be rich and continue to help other people.
Свежесть и красота в каждом цветке!
купить цветы томск
mostbet uz yangi bonus 2025 https://mostbet4073.ru
Фирменная упаковка!
букеты томск
Here is my webpage; Poker Casino
esim uk buy esim for united arab emirates
Живописные морские виды и уникальные ощущения ждут каждого, кто выберет яхта сочи прогулка. Это возможность освежить эмоции и наполниться новыми впечатлениями.
Прогулки по морю в Сочи предлагают незабываемые впечатления. Каждый год тысячи туристов выбирают этот курорт для создания незабываемых воспоминаний.
На набережной Сочи можно найти множество предложений по организации морских прогулок. Гости курорта могут наслаждаться как короткими, так и длительными прогулками вдоль живописного побережья.
Морские прогулки открывают захватывающие виды на волны и окружающие горы. Также есть возможность увидеть дельфинов и другие морские обитатели.
Обязательно возьмите с собой камеру, чтобы сохранить яркие моменты вашего отдыха. Морские экскурсии в Сочи являются прекрасным способом совместного отдыха с друзьями и семьей.
This internet site is my inhalation, real wonderful layout and Perfect subject matter.
My spouse and i were quite joyous when Raymond managed to complete his research through the precious recommendations he made through the blog. It’s not at all simplistic just to continually be offering techniques which usually the rest have been selling. Therefore we keep in mind we have the website owner to give thanks to for this. All of the illustrations you’ve made, the straightforward website menu, the friendships your site give support to create — it’s many fantastic, and it is leading our son in addition to our family consider that that topic is fun, which is certainly tremendously fundamental. Many thanks for all!
mgwin88 ความปลอดภัยที่ครอบคลุมหลายมิติ
นอกจากเรื่องเทคนิคด้านความปลอดภัย เช่น การเข้ารหัส, การยืนยันตัวตน และระบบป้องกันการแอบอ้างแล้ว สล็อตวอเลทยังช่วยให้ผู้เล่นรู้สึก มั่นใจ มากขึ้น เพราะไม่ต้องเปิดเผยข้อมูลบัญชีธนาคารหลัก หรือใช้ข้อมูลที่อาจเสี่ยงต่อการรั่วไหล
ระบบนี้ยังสามารถตั้งค่าความปลอดภัยส่วนบุคคลได้ เช่น การใส่รหัส PIN ทุกครั้งก่อนทำรายการ หรือเปิดแจ้งเตือนทันทีเมื่อมีการเคลื่อนไหว ทำให้ผู้เล่นควบคุมเงินของตนเองได้แบบเรียลไทม์
It’s an remarkable post in support of all the online people;
they will take advantage from it I am sure.
Excellent blog! Do you have any tips and hints for aspiring writers?
I’m planning to start my own site soon but
I’m a little lost on everything. Would you suggest starting with a free platform like WordPress or go for a paid option? There are so
many choices out there that I’m totally confused .. Any tips?
Thank you!
I’d like to find out more? I’d like to find out some additional information.
Feel free to surf to my site is audizen legit
Excellent blog! Do you have any tips and hints for aspiring writers? https://68kub.app/
pug 555 จึงทำให้เหล่าทีมงานมีคุณภาพและสามารถดูแลลูกค้าได้ตลอด 24 ชั่วโมง พร้อมให้คำปรึกษาดูแลอย่างดีที่สุด
Устройте оригинальный досуг — прокат яхт сочи станет незаменимым для праздников, свиданий и необычного семейного отдыха на воде.
Аренда яхты — это отличный способ провести время на воде. Все больше людей предпочитают проводить отпуск на яхте.
Процесс проката яхты может вызвать некоторые трудности. Однако, имея определенные знания, вы сможете упростить эту задачу.
Важно заранее продумать маршрут, который вы хотите пройти. Это поможет вам выбрать нужный размер и тип яхты.
Важно ознакомиться с условиями аренды перед подписанием договора. Внимательное изучение условий аренды предотвратит нежелательные проблемы.
Выйдите за рамки привычного отдыха — яхта в сочи позволит насладиться морской гладью, солнечными закатами и тишиной вдали от суеты.
Аренда яхты — это замечательный способ провести время на воде. Можно выбрать по своему вкусу: от яхт с высокой скоростью до комфортных катеров.
Перед тем как арендовать яхту, важно изучить все варианты и предложения. Каждая компания предлагает различные условия аренды, включая цены и дополнительные услуги.
Обязательно проверьте все условия, прежде чем заключать контракт. Важно понимать, какие услуги включены в цену аренды, а какие будут стоить дополнительно.
Аренда яхты — это не только увлекательное приключение, но и возможность создать незабываемые воспоминания. Неважно, планируете ли вы спонтанный отдых или заранее запланированное мероприятие, яхта будет прекрасным местом.
Поставляем оборудование как для малого бизнеса, так и для крупных предприятий. Наша продажа подъемного оборудования ориентирована на ваши нужды.
Важность подъемного оборудования в строительстве трудно переоценить. Оно используется для перемещения тяжелых грузов на высоту и облегчает рабочие процессы.
Подъемное оборудование делится на несколько категорий, таких как подъемники, краны и прочие механизмы. Каждое из этих устройств имеет свои особенности и предназначение, что позволяет выбрать наиболее подходящее решение для конкретной задачи.
Технический осмотр подъемного оборудования — это важный шаг перед его эксплуатацией. Проверка состояния техники позволяет избежать аварийных ситуаций и обеспечить безопасность.
Также важно соблюдать правила эксплуатации подъемного оборудования. Соблюдение всех рекомендаций по эксплуатации оборудования помогает предотвратить аварии и травмы.
Look into my web blog pokertube — watch Free Poker videos & tv shows
Хотите подчеркнуть свою индивидуальность? Тогда заказать футболку со своим принтом — это идеальное решение. Удобно, просто и без лишней волокиты.
Футболки с индивидуальными принтами — отличное средство самовыражения. С помощью различных технологий можно превратить обычный текстиль в настоящие произведения искусства.
Существует несколько популярных методов печати на футболках, каждый из которых имеет свои особенности. Например, трафаретная печать известна своей долговечностью и яркостью красок. Еще одним интересным методом является цифровая печать, позволяющая создавать сложные и детализированные изображения.
При выборе метода печати стоит учитывать не только дизайн, но и тип ткани. Некоторые ткани лучше подходят для трафаретной печати, в то время как другие — для цифровой.
Количество заказываемых футболок может существенно изменить ваши затраты на печать. Для массового производства чаще используется трафаретная печать, а для небольших заказов — цифровая.
Получите транспорт сегодня — платите завтра. лизинг на коммерческий транспорт помогает масштабировать бизнес, сохранив финансовую гибкость.
Лизинг коммерческого транспорта — это отличная возможность для бизнеса. Лизинг дает возможность пользоваться новыми автомобилями, не тратя много средств upfront.
Поскольку лизинг обычно включает техническое обслуживание, это уменьшает финансовую нагрузку на бизнес. Это дает возможность бизнесу сосредоточиться на своих целях, а не на ремонте транспортных средств.
Выбор подходящих условий лизинга — важный этап для бизнеса. Некоторые компании предлагают гибкие сроки и размеры платежей, что делает лизинг доступным для разных бизнесов.
Важно также учитывать налоговые преимущества лизинга. Компаниям доступна возможность вычета затрат на лизинг из налогооблагаемой базы.
1win 1win
Одна из них, под командою Крысобоя, должна будет конвоировать преступников, повозки с приспособлениями для казни и палачей при отправлении на Лысую Гору, а при прибытии на нее войти в верхнее оцепление. Нотариальный перевод документов: цены, сроки, где заказать Стоило только поднять голову от лампы вверх к небу, чтобы понять, что ночь пропала безвозвратно.
Это было в бою при Идиставизо, в Долине Дев. Нотариальный перевод и апостиль: Легко и быстро! Незнакомец дружелюбно усмехнулся, вынул большие золотые часы с алмазным треугольником на крышке, прозвонил одиннадцать раз и сказал: – Одиннадцать! И ровно час, как я дожидаюсь вашего пробуждения, ибо вы назначили мне быть у вас в десять.
plinko game https://www.plinko-kz1.ru
There are thousands of articles online about boilers — but 90% of them are fluff. kotelinaya.ru stands out because it’s made by people who clearly installed these systems themselves. No useless theory, just step-by-step explanations of what works in Russian climates and why.
Заказала розы для фотосессии — получились потрясающие кадры!
белые розы купить томск
Забота о чистоте может быть приятной — услуги генеральной уборки включают всё необходимое для полной очистки помещений.
Процесс генеральной уборки является ключевым для создания комфортной и уютной атмосферы в вашем доме. Каждый из нас время от времени сталкивается с необходимостью провести такую уборку.
Прежде всего, необходимо решить, какие комнаты требуют более тщательной уборки. Это может быть кухня, гостиная или спальня — в зависимости от того, где наиболее заметен беспорядок.
Подготовьте все нужные принадлежности, так уборка пройдет быстрее и эффективнее. Подготовьте чистящие порошки, губки и ведра — так вы будете готовы к убиранию.
Создание детального плана уборки — залог эффективного результата. Обратите внимание на все труднодоступные места, это поможет сделать уборку более качественной.
Нам таких швейцаров в ресторане даром не надо. жириновский: взгляды на отношения, секс и знакомства Тут послышалось слово: «Доктора!» – и чье-то ласковое мясистое лицо, бритое и упитанное, в роговых очках, появилось перед Иваном.
Con los espectaculos con drones, tu evento cobra vida en el cielo, ofreciendo un despliegue unico que deja una impresion duradera en cada espectador.
El espectaculo de drones ha cobrado popularidad en los ultimos anos. Los espectaculos con drones brindan una experiencia espectacular que fascina a una multitud.
Estos dispositivos voladores pueden ejecutar movimientos precisos y coordinados en el aire. Gracias a sus sofisticados sistemas de control, los drones pueden ejecutar acrobacias sorprendentes.
Uno de los aspectos mas destacados de estos espectaculos es la sincronizacion perfecta entre los drones. Cuando miles de drones iluminan el cielo al unisono, se crea un efecto visual que deja sin aliento.
El desarrollo continuo en la tecnologia de drones sugiere un futuro brillante para estas exhibiciones. Es posible que en los proximos anos se presenten actuaciones aun mas asombrosas que sorprenderan al publico.
Психолог онлайн: ваш ключ к эмоциональному благополучию
В современном мире, где ритм жизни становится все быстрее, многие из нас сталкиваются с эмоциональными трудностями: стрессом, тревогой, неуверенностью или проблемами в отношениях. К счастью, сегодня доступна профессиональная помощь в удобном формате — психолог онлайн. Это не просто тренд, а реальный способ заботиться о своем душевном здоровье без лишних усилий.
### Почему стоит выбрать психолога онлайн?
Онлайн-консультации с психологом открывают новые возможности для тех, кто ценит свое время и комфорт. Вам не нужно тратить часы на дорогу или подстраиваться под график оффлайн-приема. С помощью интернета вы можете получить поддержку в любое удобное время, находясь дома или даже в командировке. Конфиденциальность и безопасность гарантированы — все сессии проходят в защищенном формате.
Еще одно преимущество — доступ к высококлассным специалистам. Онлайн-психологи часто имеют опыт работы с клиентами из разных уголков мира, что обогащает их подход. Вы сможете найти специалиста, который идеально подходит именно вам, независимо от вашего местоположения.
### Как работает онлайн-психология?
Процесс прост и интуитивно понятен. После записи на консультацию вы связываетесь с психологом через видеосвязь, телефон или чат. Сеанс длится обычно 50-60 минут, в течение которых вы обсуждаете свои проблемы, получаете поддержку и вырабатываете стратегии для улучшения жизни. Психолог онлайн помогает справиться с депрессией, тревожными состояниями, улучшить самооценку и наладить отношения.
### Преимущества работы с онлайн-психологом
1. **Гибкость**. Сеансы можно проводить в удобное для вас время, даже ночью, если это необходимо.
2. **Экономия времени**. Забудьте о пробках и долгих поездках — помощь всегда под рукой.
3. **Индивидуальный подход**. Каждый клиент получает персонализированную стратегию работы над собой.
4. **Анонимность**. Вы можете быть уверены, что ваши данные останутся конфиденциальными.
### Как начать?
Первый шаг — это записаться на пробную консультацию. Это отличный способ познакомиться с психологом и понять, подходит ли вам его стиль работы. Большинство специалистов предлагают бесплатные или недорогие вводные сессии. После этого вы можете выбрать удобный график и формат общения.
Психолог https://t.me/Asiapsi — это ваш шанс взять контроль над своей жизнью и вернуть гармонию. Не откладывайте заботу о себе на потом — начните уже сегодня. Запишитесь на консультацию и убедитесь, как легко можно справиться с любыми вызовами вместе с профессионалом. Ваше эмоциональное здоровье заслуживает внимания, и онлайн-психология — идеальный инструмент для этого!
Цветы доставили в соседний город — получатель сказал, что это лучший подарок!
цветы
Found a very thorough and practical guide on installing moisture barriers at domograph.ru. It explained in detail how to select the right materials, prepare surfaces correctly, and lay vapor insulation without leaving gaps. Thanks to this guide, I avoided the usual mistakes and now enjoy a dry, mold-free attic that holds heat better during winter.
Thanks very nice blog!
Visit my blog post; https://Safalaya.com/profile/Clarice00Z
1win 1win
If your builder says ‘we always do it this way’, send them a few articles from kotelinaya.ru. I did — and it actually changed how they proposed to run the heating loop. When a blog gives you leverage like that, it’s doing something right.
Feel free to visit my webpage … Watch Free Poker Videos & TV Shows
Hey I know this is off topic but I was wondering if you knew of any widgets I could add to my blog
that automatically tweet my newest twitter updates.
I’ve been looking for a plug-in like this for quite some time and was hoping maybe you would have some experience with something like this.
Please let me know if you run into anything. I truly enjoy reading your blog and I look forward to your new updates.
Парфюм с сандалом имеет уникальный и запоминающийся аромат. Сандал добавляет парфюму ощущение роскоши и загадочности.
Существует множество вариаций парфюмов, использующих сандал. Некоторые из них обладают сладкими нотами, в то время как другие более свежие и древесные.
Древесный оттенок сандала идеально сочетается с цветочными акцентами, создавая гармоничный аромат. Многие предпочитают ароматы с сандалом для романтических встреч или вечерних мероприятий.
Не стоит забывать, что сандал также применяется в ароматерапии благодаря своим расслабляющим свойствам. Парфюм с сандалом может стать замечательным подарком на любой праздник.
парфюм сандал https://www.sandalparfums.ru/
bet 285 24 ชั่วโมงเต็ม รองรับภาษาไทยเต็มรูปแบบ พร้อมเจ้าหน้าที่ดูแลตลอดวันทุกช่องทาง https://bet285.pages.dev/
Regards, Quite a lot of posts!
українські фільми новинки кіно 2025 дивитися безкоштовно
Букет «Вишневый сад» — оттенок роз просто божественный!
купить букет роз томск
betflik19 เว็บเกมสล็อตออนไลน์ รองรับทุกระบบของมือถือและคอมพิวเตอร์ เปิดรับสมัครยูสใหม่ เกมแตก แจกง่ายๆ เครดิตฟรีมีให้ทุกวัน รับประกันความสนุกในการปั่นสล็อตอย่างแน่นอน betflik19
Букет «Ночная фиалка» — таинственный шарм!
доставка цветов в томске
bet 285 เป็นแพลตฟอร์มเกมออนไลน์ที่น่าตื่นเต้นและน่าเชื่อถือสำหรับผู้ที่ชื่นชอบการเล่นเกมเดิมพัน ไม่ว่าจะเป็นเกมคาสิโนสด สล็อต หรือกีฬาออนไลน์ ที่นี่คุณสามารถสัมผัสประสบการณ์การเล่นที่สนุกสนานและเต็มไปด้วยความท้าทาย พร้อมกับโอกาสในการชนะรางวัลใหญ่
Розовые пионовидные розы — нежность и пышность, как у невесты!
купить 101 розу в томске
Спасибо за учительский букет — оценила по достоинству!
доставка цветов в томске
Knowing which foam to use for windows improves energy efficiency. The guide on pakstore.ru helped me choose the right type of mounting foam for window insulation, preventing drafts effectively.
betflix1150 วางแผนและบริหารงบประมาณอย่างชาญฉลาด
ไม่ว่าคุณจะเล่นเกมอะไรก็ตามในคาสิโนออนไลน์ การวางแผนเงินทุนคือหัวใจสำคัญของการเล่นอย่างมืออาชีพ
เคล็ดลับการจัดการงบประมาณ
กำหนดงบประมาณรายวัน เช่น วันละ 300 บาท
แบ่งงบประมาณเป็นรอบๆ เช่น ตาละ 50 บาท เล่นได้ 6 ตา
ตั้งเป้าหมายทั้งกำไรและขาดทุน เช่น ได้กำไร 500 หยุดทันที หรือเสียครบงบก็หยุด
การรู้จักพอและควบคุมอารมณ์จะทำให้คุณเล่นได้อย่างยั่งยืน และไม่ทำให้การเล่นบาคาร่ากลายเป็นความเครียด
Very well expressed truly. !
Быстрое реагирование, чёткая организация, современные технологии. Всё это — клининг санкт петербург от команды с опытом и рекомендациями.
Услуги клининга в СПБ – это популярное решение для многих людей и бизнесов. Чистота и порядок имеют большое значение в повседневной жизни. Многие компании предлагают клининговые услуги.
Определение нужд в клининге – первый шаг к чистоте. Например, нужны ли вам услуги по уборке квартир или офисов. Не забудьте учесть, как часто вам нужна уборка.
Второй этап – найти проверенного подрядчика. Обратите внимание на отзывы клиентов. Проверенные клининговые организации обязательно дадут гарантии на результат.
Наконец, прежде чем сделать выбор, обязательно сравните цены. Разные компании могут предлагать различные расценки на свои услуги. Дорогие услуги не всегда гарантируют высокое качество.
beo555 เกมออนไลน์อันดับ 1 ที่มาพร้อมกับประสบการณ์การเล่นเกมที่ยอดเยี่ยมและไม่เหมือนใคร ด้วยระบบที่ทันสมัยและการออกแบบที่ตอบโจทย์ผู้เล่นทุกระดับ Beo555 นำเสนอเกมหลากหลายประเภท ไม่ว่าจะเป็นเกมคาสิโนออนไลน์ สล็อต บาคาร่า หรือเกมอื่น ๆ ที่ให้ความสนุกและความตื่นเต้นแบบเต็มรูปแบบ
Hi, my name is Hannah. I believe this game holds many fond memories, so I’d like to share my experience with you all. Give it a try! I guarantee you’ll win big and it’s definitely worth the investment. สล็อตออนไลน์ Click here.
смотреть кино онлайн новые аниме 2025
SBF PLAY99 เว็บไซต์อันดับหนึ่งสำหรับคนรักเกมออนไลน์!
พบกับประสบการณ์ความสนุกและความตื่นเต้นที่ไม่เหมือนใคร กับเกมคาสิโนออนไลน์ที่หลากหลาย ทั้งสล็อต ยิงปลา บาคาร่า และอีกมากมาย พร้อมโปรโมชั่นสุดพิเศษที่รอคุณอยู่ทุกวัน!
สมัครสมาชิกง่ายๆ ระบบฝาก-ถอนรวดเร็ว ปลอดภัย มั่นใจได้ 100%
มาเป็นส่วนหนึ่งของความสนุกกับเรา SBFPLAY99 แล้วคุณจะไม่ผิดหวัง
Доставили на яхту — шикарно и романтично!
доставка цветов в томске
Here is my site :: http://www.kumkangenc.com
ยินดีต้อนรับสู่ betflik 09 เว็บตรงอันดับ 1 ที่ทุกคนไว้วางใจ! เราคือแพลตฟอร์มที่มอบประสบการณ์การเดิมพันที่ดีที่สุด จ่ายจริง แตกง่าย และเต็มไปด้วยเกมหลากหลายให้คุณเลือกสนุกได้ไม่มีเบื่อ ไม่ว่าคุณจะเป็นสายสล็อต คาสิโน หรือเกมอื่น ๆ เรามีครบจบในที่เดียว พร้อมด้วยระบบฝาก-ถอนที่รวดเร็วและปลอดภัย อย่ารอช้า มาเป็นส่วนหนึ่งกับเราแล้วลุ้นรับรางวัลใหญ่ไปด้วยกัน
как пополнить счет на melbet https://melbet1035.ru
Installing vapor barriers in crawl spaces was less intimidating after reading the guide on rjadom.ru. It helped me protect my foundation from dampness and damage.
My brother suggested I would possibly like this blog. He was totally right. This publish actually made my day. You can not believe just how so much time I had spent for this information! Thanks!
Feel free to visit my website: http://Dzcpdemos.Gamer-Templates.de/dzcpv1554demo12orange/news/?action=show&id=5&coi=1494&npp=3&p=0&pp=0&mid=9&ep=3&du=dzcpdemos.gamer-templates.de/dzcpv1554demo12orang
From city anniversaries to global expos, a spectacular drones show adds powerful visual storytelling and futuristic elegance to your next major production.
A drone light show is an innovative way to entertain large crowds. These aerial displays combine technology and artistry to create stunning visuals in the night sky.
One of the key advantages of drone light shows is their versatility. They can be customized to fit any event, whether it be a wedding or a public celebration.
Drone light shows are also recognized for their minimal environmental impact. By using drones, organizers significantly reduce the environmental damage typically associated with fireworks.
As technology continues to evolve, the future of drone light shows looks promising. Future shows are set to become even more sophisticated and visually stunning as innovation progresses.
дизайнерский горшок дизайнерский горшок .
If some one desires expert view regarding blogging after that i advise him/her to pay a
quick visit this web site, Keep up the nice job.
Review my website; brain defender reviews
помощь наркозависимым
ragnarok private server
[…]that is the end of this article. Here you will come across some sites that we believe you will value, just click the hyperlinks over[…]
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
I need to to thank you for this very good read!!
I certainly loved every little bit of it.
I’ve got you book marked to look at new stuff you post…
Here is my website: ereforce
помощь наркозависимым
помощь наркозависимым
лечение от наркотиков
помощь наркозависимым
наркозависмость
наркозависмость
лечение от наркотиков
Thanks! A good amount of posts.
помощь наркозависимым
наркозависмость
лечение от наркотиков
наркозависмость
наркозависмость
Спасибо за открытку с теплыми словами — это было очень трогательно!
доставка цветов в томске
наркозависмость
помощь наркозависимым
лечение от наркотиков
помощь наркозависимым
наркозависмость
лечение от наркотиков
UFABET888 สล็อตแตกง่าย เว็บตรง ได้เงินจริง ให้บริการเกมสล็อตออนไลน์ที่มีคุณภาพสูง เล่นง่าย โบนัสแตกบ่อย พร้อมระบบฝาก-ถอนอัตโนมัติ รวดเร็วทันใจ ปลอดภัย 100% เหมาะสำหรับผู้ที่ต้องการความสนุกและรายได้เสริมจากการเล่นเกม สมัครสมาชิกวันนี้รับโปรโมชั่นพิเศษมากมาย
Доставили в область без проблем.
купить цветы в томске
лечение от наркотиков
лечение от наркотиков
лечение от наркотиков
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
Спасибо за молниеносную доставку — цветы были свежими, будто только что срезаны!
букет цветов томск
помощь наркозависимым
помощь наркозависимым
Ваши весенние композиции — как глоток свежести!
заказать цветы томск
Сестра прыгала от радости!
доставка цветов томск
стильные вазоны стильные вазоны .
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
1win virtual sport https://1win3065.ru
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
https://rant.li/gofibuauhe/nusa-dua-bali-kupit-gashish-boshki-marikhuanu
https://git.project-hobbit.eu/uuhodignoh
https://ucgp.jujuy.edu.ar/profile/sidihkledeba/
https://www.rwaq.org/users/sweetjaunitaredangelstyle28-20250806004939
https://pxlmo.com/azzamoganst9
https://ucgp.jujuy.edu.ar/profile/tuacaffyd/
https://community.wongcw.com/blogs/1123316/%D0%9A%D0%B8%D1%80%D0%B8%D0%BD%D0%B8%D1%8F-%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD-%D0%AD%D0%BA%D1%81%D1%82%D0%B0%D0%B7%D0%B8-%D0%91%D0%BE%D1%88%D0%BA%D0%B8
https://paper.wf/ohadobac/liubliana-kupit-gashish-boshki-marikhuanu
https://allmynursejobs.com/author/texiaboold/
https://pxlmo.com/ekargyamfi
https://kemono.im/ifugjiicxlzi/seged-kupit-ekstazi-mdma-lsd-kokain
https://git.project-hobbit.eu/uadybmcify
https://ucgp.jujuy.edu.ar/profile/kuhuihahide/
https://kemono.im/ycedidace/irlandiia-kupit-ekstazi-mdma-lsd-kokain
betflik88 ทีมงานมืออาชีพจาก PGSLOT ดูแลคุณ 24 ชั่วโมง
เราไม่ได้ให้บริการแค่เกม แต่ยังมีทีมงานมืออาชีพที่ พร้อมให้คำแนะนำและแก้ไขปัญหาอย่างมืออาชีพ ตลอด 24 ชั่วโมง ไม่ว่าจะเป็นปัญหาเรื่องเกม ระบบ หรือธุรกรรมต่างๆ คุณสามารถติดต่อสอบถามได้ทุกเวลา เพราะเราพร้อมดูแลคุณดั่งลูกค้า VIP
https://potofu.me/7nmirqmu
https://allmynursejobs.com/author/cathyatkinsoncat/
https://ucgp.jujuy.edu.ar/profile/ebabahye/
https://ucgp.jujuy.edu.ar/profile/ydecjuibeo/
สุดยอดเว็บ สล็อตออนไลน์ จุดศูนย์รวม ความสนุกสนานและเกมน่าเล่นอีกมากมาย พร้อมแอดมินสาวสวยคอยให้บริการ tkb333
https://www.passes.com/waldoredhulk1
https://rant.li/ckufedeohub/peskara-kupit-ekstazi-mdma-lsd-kokain
https://potofu.me/q32svxbb
g2g888 เว็บสล็อต เว็บตรง เล่นง่าย เกมแตกง่าย แจกจริง รับประกันความสนุก ตื่นเต้นไปกับทุกเกมของเรา
оригинальные кашпо для цветов купить оригинальные кашпо для цветов купить .
https://hub.docker.com/u/Pearsooncoololp
https://allmynursejobs.com/author/najenicoh/
https://pxlmo.com/bre.morningsun
https://kemono.im/qebabefoyby/kuba-kupit-gashish-boshki-marikhuanu
Букет для любимой — она сказала, что это самые красивые цветы в ее жизни!
доставка цветов в томске
https://bio.site/efvfwoofucuh
https://pxlmo.com/muchel24folk
https://rant.li/tybuhiftog/kuba-kupit-ekstazi-mdma-lsd-kokain
https://www.passes.com/negativmegacratex
https://miiliiroulet.bandcamp.com/album/this
Review my homepage PokerTube — Watch Free Poker Videos & TV Shows
https://www.passes.com/kansoogugel
https://say.la/read-blog/122545
https://git.project-hobbit.eu/gvifaicoc
https://allmynursejobs.com/author/femorhisoka/
https://www.brownbook.net/business/54134809/купить-кокаин-бурса/
https://ucgp.jujuy.edu.ar/profile/dneduhehyg/
https://pxlmo.com/marheahotel
https://www.band.us/band/99531283/
https://allmynursejobs.com/author/businessman872/
https://hoo.be/iboefyect
https://allmynursejobs.com/author/brans_fulula/
https://muckrack.com/person-27409289
g2g888 พบกับเว็บสล็อตออนไลน์ ที่จะให้ความสนุก แหล่งรวมความบันเทิงจากเกมคาสิโนออนไลน์ที่ดีที่สุด อยู่ที่นี่แล้ว
https://hub.docker.com/u/RyanChangRya
https://hub.docker.com/u/duffykieledd
https://imageevent.com/tayseesakieb/lphxa
https://brightmemories.ru
https://crovlyagrad.online
https://ltalfa.ru
https://drive-service65.ru
https://schoolgraffiti.ru
https://ltalfa.ru
https://treneramo.online
https://art-vis.ru
https://printbarglobal.ru
https://abz-istok.online
https://vlgprestol.online
https://respublika1.online
https://vlgprestol.online
https://treneramo.online
https://ooo-mitsar.online
https://e3-studio.online
Hello There. I found your blog using msn. This is a really well written article.
I will mak sure to bookmark it aand return to read more
oof your useful information. Thanks for the post. I’ll certainly comeback.
My site — estate Taxes attorney
Factor very well considered.!
https://respublika1.online
mobila de lemn la comanda mobila de lemn la comanda
https://belovahair.online
https://abz-istok.online
https://kanscity.online
https://respublika1.online
Стамбул
https://respublika1.online
https://rant.li/1vr746u8jc
https://beteiligung.stadtlindau.de/profile/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C%20%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD%20%D0%9C%D0%B5%D1%84%D0%B5%D0%B4%D1%80%D0%BE%D0%BD%20%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D1%83%20%D0%94%D1%80%D0%B5%D0%B7%D0%B4%D0%B5%D0%BD/
https://allmynursejobs.com/author/iqtennolufsenlife/
https://www.brownbook.net/business/54152307/мармарис-кокаин-мефедрон-марихуана/
https://bio.site/muycafbefeb
https://www.band.us/page/99563251/
https://ucgp.jujuy.edu.ar/profile/duibtygygv/
https://hoo.be/wtdxebee
https://odysee.com/@dizmencumaa
https://pxlmo.com/vojtadeyones
what is considered a high roller at a casino
References:
high roller casino (http://piglix.com/user/vacuumpair12)
https://wanderlog.com/view/jdykosjhuo/
https://hub.docker.com/u/AnneMckeeAnn
https://allmynursejobs.com/author/daniapardes2/
https://allmynursejobs.com/author/shyguyscott540/
https://www.themeqx.com/forums/users/gihoiyobzefe/
online casino
References:
what is considered a high roller in Vegas (https://flores-bruce-2.federatedjournals.com/best-casinos-for-high-rollers-within-the-usa-with-vip-rewards-2024)
https://rant.li/ftlw4i49xg
https://hoo.be/igpydyfoficu
https://odysee.com/@kfouriebbas
las vegas high roller
References:
what is a poker high roller, https://doodleordie.com/profile/perchrayon05,
https://git.project-hobbit.eu/oabiubyoi
https://muckrack.com/person-27420170
https://say.la/read-blog/124143
https://rant.li/fafogghy/buenos-aires-kupit-gashish-boshki-marikhuanu
https://rant.li/uudofehae/ras-el-khaima-kupit-ekstazi-mdma-lsd-kokain
limits
References:
online casino high roller (https://ucgp.jujuy.edu.ar/profile/easepillow60/)
https://www.band.us/band/99545059/
https://allmynursejobs.com/author/yvetttl0l/
slot
References:
what is a high roller in gambling (https://ucgp.jujuy.edu.ar/profile/chessclose57/)
https://ucgp.jujuy.edu.ar/profile/ycmiudihpa/
https://pxlmo.com/uyageabaya
https://allmynursejobs.com/author/pityuflamey/
https://pxlmo.com/daggershiny429
https://rant.li/agwigoufibaf/zugdidi-kupit-kokain-mefedron-marikhuanu
what is a vip high roller
References:
online casino — https://peatix.com/user/27503791,
https://hoo.be/sodaeafug
https://beteiligung.stadtlindau.de/profile/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C%20%D0%AD%D0%BA%D1%81%D1%82%D0%B0%D0%B7%D0%B8%20%D0%9C%D0%94%D0%9C%D0%90%20%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD%20%D0%9A%D1%80%D0%B8%D1%82/
what is a high roller in gambling
References:
second high-roller deal; http://www.stes.tyc.edu.tw/xoops/modules/profile/userinfo.php?uid=3615680,
https://jesusukupecz.bandcamp.com/album/bride
https://www.band.us/band/99544977/
стильные цветочные горшки купить стильные цветочные горшки купить .
what is a high roller in poker
References:
high roller slot games (https://yatirimciyiz.net/user/armchime51)
https://muckrack.com/person-27418802
https://dreampattiepattierose061984.bandcamp.com/album/ample
https://www.themeqx.com/forums/users/gihoiyobzefe/
what is a high roller in vegas
References:
https://support.mikrodev.com/index.php?qa=user&qa_1=sheetpocket91
https://rant.li/3zo7n01vq4
https://ucgp.jujuy.edu.ar/profile/bzudgyhay/
https://www.themeqx.com/forums/users/qyifufig/
https://www.metooo.io/u/68977f865919bc39b57df297
https://potofu.me/fvgrwhsm
https://hub.docker.com/u/bazitawisso
https://hoo.be/jycludwudd
https://potofu.me/e4hmurzc
https://www.band.us/page/99569945/
https://git.project-hobbit.eu/ceuhaiuha
https://beteiligung.stadtlindau.de/profile/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C%20%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD%20%D0%9C%D0%B5%D1%84%D0%B5%D0%B4%D1%80%D0%BE%D0%BD%20%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D1%83%20%D0%9D%D0%B0%D0%BD%D1%82/
https://www.themeqx.com/forums/users/zugehohz/
https://say.la/read-blog/123896
https://allmynursejobs.com/author/prettyguy772/
https://www.band.us/page/99570267/
https://muckrack.com/person-27433338
https://muckrack.com/person-27431686
https://community.wongcw.com/blogs/1128228/%D0%9B%D1%8C%D0%BE%D1%80%D0%B5%D1%82-%D0%B4%D0%B5-%D0%9C%D0%B0%D1%80-%D0%90%D0%BC%D1%84%D0%B5%D1%82%D0%B0%D0%BC%D0%B8%D0%BD-%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD-%D0%AD%D0%BA%D1%81%D1%82%D0%B0%D0%B7%D0%B8
https://wanderlog.com/view/hbudaembel/
https://muckrack.com/person-27418657
https://community.wongcw.com/blogs/1128183/%D0%91%D1%83%D1%80%D1%81%D0%B0-%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D0%B0-%D0%93%D0%B0%D1%88%D0%B8%D1%88-%D0%9A%D0%B0%D0%BD%D0%B0%D0%B1%D0%B8%D1%81
testosterone enanthate and dianabol cycle
References:
dianabol and testosterone cycle for beginners (http://support.roombird.ru/index.php?qa=user&qa_1=georgedirt5)
https://muckrack.com/person-27433315
https://odysee.com/@etgninestoopLowstop
https://www.montessorijobsuk.co.uk/author/ufcsoeegudn/
https://git.project-hobbit.eu/igspofuhtiug
https://git.project-hobbit.eu/ibogihhu
https://www.rwaq.org/users/zounkameruj-20250808144941
https://wanderlog.com/view/salbknfezu/
https://muckrack.com/person-27417373
https://git.project-hobbit.eu/ececyuhky
https://bio.site/dugabehidydy
https://wanderlog.com/view/ujhhpgrjrd/
https://muckrack.com/person-27433348
https://ucgp.jujuy.edu.ar/profile/ocfvhyuegad/
https://ucgp.jujuy.edu.ar/profile/odoogwyo/
https://ucgp.jujuy.edu.ar/profile/oocednegu/
https://odysee.com/@keodotevik
https://bio.site/fkioubab
https://www.brownbook.net/business/54151623/закинф-амфетамин-кокаин-экстази/
https://bio.site/eecygehe
https://git.project-hobbit.eu/maghuigeydu
https://bio.site/kyacqugy
https://pxlmo.com/demonxaoca387
https://www.themeqx.com/forums/users/obqrabebeo/
https://www.passes.com/naudaymtimba
https://say.la/read-blog/123565
https://www.montessorijobsuk.co.uk/author/cadnqhyefohu/
https://pxlmo.com/russianboymrproper
https://pxlmo.com/mrjesonleon_1992
https://hub.docker.com/u/dnDyremefive
https://www.brownbook.net/business/54151588/фуншал-амфетамин-кокаин-экстази/
https://www.brownbook.net/business/54152394/рыбник-марихуана-гашиш-канабис/
https://hoo.be/xeeihifyb
https://community.wongcw.com/blogs/1128027/%D0%A4%D1%80%D0%B0%D0%BD%D0%BA%D1%84%D1%83%D1%80%D1%82-%D0%BD%D0%B0-%D0%9C%D0%B0%D0%B9%D0%BD%D0%B5-%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D0%B0-%D0%93%D0%B0%D1%88%D0%B8%D1%88-%D0%9A%D0%B0%D0%BD%D0%B0%D0%B1%D0%B8%D1%81
https://www.metooo.io/u/68977f18fc9691709a5371ca
https://muckrack.com/person-27432182
https://odysee.com/@Zd3naneew
https://pxlmo.com/Christina.Jefferson
Hello! This is my 1st comment here so I just wanted to give
a quick shout out and say I really enjoy reading your articles.
Can you recommend any other blogs/websites/forums that
go over the same subjects? Thanks!
My website … Inheritance Attorney
https://paper.wf/ebahibgii/vanadzor-kupit-kokain-mefedron-marikhuanu
https://rant.li/aceuaiuufscy/espoo-kupit-kokain-mefedron-marikhuanu
https://potofu.me/mg06z7uy
https://beteiligung.stadtlindau.de/profile/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C%20%D0%91%D0%BE%D1%88%D0%BA%D0%B8%20%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D1%83%20%D0%93%D0%B0%D1%88%D0%B8%D1%88%20%D0%9C%D0%B0%D0%B4%D1%80%D0%B8%D0%B4/
https://paper.wf/mtydiifydq/rimini-kupit-ekstazi-mdma-lsd-kokain
https://odysee.com/@heartGranstromMarie04
https://muckrack.com/person-27431909
https://odysee.com/@TroyByrdTro
https://muckrack.com/person-27428855
https://rant.li/yhvyaihdxee/klaipeda-kupit-gashish-boshki-marikhuanu
https://wotanyhaught.bandcamp.com/album/beak
https://www.band.us/page/99545151/
https://potofu.me/hdtd63wa
https://bio.site/wahubauyheha
https://www.rwaq.org/users/arjosbaert-20250809173223
https://yeelaadawu.bandcamp.com/album/amend
https://www.band.us/page/99546047/
https://potofu.me/3gj194gb
https://rant.li/tydebafjx/mairkhofen-kupit-gashish-boshki-marikhuanu
https://pxlmo.com/taslitmiuyee
https://www.band.us/page/99569160/
https://pxlmo.com/bumperbuttximik
https://www.montessorijobsuk.co.uk/author/jubygoubyodx/
https://paper.wf/edihydycuu/lodz-kupit-kokain-mefedron-marikhuanu
https://say.la/read-blog/123784
https://rant.li/sodohcydi/valletta-kupit-kokain-mefedron-marikhuanu
https://www.themeqx.com/forums/users/lyfqagyby/
https://paper.wf/ocefyoca/oulu-kupit-ekstazi-mdma-lsd-kokain
https://www.band.us/page/99563375/
https://bio.site/eacehhhadig
https://potofu.me/ft53umym
https://www.band.us/page/99569328/
https://say.la/read-blog/123649
https://say.la/read-blog/123894
https://muckrack.com/person-27433051
https://www.montessorijobsuk.co.uk/author/ycidruhofic/
What a information of un-ambiguity and preserveness of valuable know-how about
unexpected feelings.
Heere is my homepage family wealth transfer Planning
https://potofu.me/n1gvicm0
https://ziogoutobba.bandcamp.com/album/behold
https://community.wongcw.com/blogs/1128679/%D0%A2%D1%80%D0%BE%D0%BC%D1%81%D1%91-%D0%90%D0%BC%D1%84%D0%B5%D1%82%D0%B0%D0%BC%D0%B8%D0%BD-%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD-%D0%AD%D0%BA%D1%81%D1%82%D0%B0%D0%B7%D0%B8
https://www.band.us/band/99545883/
https://bio.site/uhofabedy
https://www.brownbook.net/business/54152362/верона-амфетамин-кокаин-экстази/
https://muckrack.com/person-27431772
https://beteiligung.stadtlindau.de/profile/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C%20%D0%AD%D0%BA%D1%81%D1%82%D0%B0%D0%B7%D0%B8%20%D0%9C%D0%94%D0%9C%D0%90%20%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD%20%D0%9A%D0%BB%D0%B0%D0%B9%D0%BF%D0%B5%D0%B4%D0%B0/
https://bio.site/oclofiigf
https://www.brownbook.net/business/54152941/брага-амфетамин-кокаин-экстази/
https://git.project-hobbit.eu/edwudecugpo
https://rant.li/mubybichocih/glazgo-kupit-kokain-mefedron-marikhuanu
https://git.project-hobbit.eu/ffyhycefyeg
https://allmynursejobs.com/author/saszkaloyst/
https://yeelaadawu.bandcamp.com/album/amend
https://paper.wf/tehybogyi/gozhuv-vel-kopol-skii-kupit-kokain-mefedron-marikhuanu
https://bio.site/afbagaogy
https://ucgp.jujuy.edu.ar/profile/nyhibebo/
https://www.montessorijobsuk.co.uk/author/luahedoc/
https://paper.wf/uyfllcigub/kaio-koko-kupit-gashish-boshki-marikhuanu
https://muckrack.com/person-27433156
https://rant.li/uohayacnyec/kopengagen-kupit-gashish-boshki-marikhuanu
https://hoo.be/viocofec
https://ucgp.jujuy.edu.ar/profile/ecrafedu/
https://muckrack.com/person-27435196
https://pxlmo.com/musiarhason
https://www.montessorijobsuk.co.uk/author/oadhedyubkae/
https://allmynursejobs.com/author/lilysomessnyderfi/
https://www.band.us/page/99546137/
https://paper.wf/iocsznogwihn/beer-sheva-kupit-ekstazi-mdma-lsd-kokain
https://hub.docker.com/u/sevenLaaulundlil
https://paper.wf/ygycodecyg/abu-dabi-kupit-ekstazi-mdma-lsd-kokain
https://allmynursejobs.com/author/billydriscoll2575/
https://www.band.us/page/99562299/
https://odysee.com/@hardskillfenix821
https://allmynursejobs.com/author/daisy_pearl13_03/
https://ucgp.jujuy.edu.ar/profile/ogicicqe/
https://allmynursejobs.com/author/mastansaraya/
https://www.brownbook.net/business/54154007/андорра-амфетамин-кокаин-экстази/
https://allmynursejobs.com/author/iamzadrotklatton/
https://hub.docker.com/u/TeresaGibsonTer
Everything is very open with a very clear description of the issues.
It was truly informative. Your site is very useful.
Thanks for sharing!
Visit my web page … stakes Casino
https://wanderlog.com/view/gqmnrisntk/
https://allmynursejobs.com/author/anarasius_chico/
https://rugerifryc.bandcamp.com/album/bead
купить кашпо дизайнерские https://www.dizaynerskie-kashpo-nsk.ru .
https://paper.wf/yygafubagyf/rotterdam-kupit-gashish-boshki-marikhuanu
https://community.wongcw.com/blogs/1128410/%D0%91%D0%B0%D0%B7%D0%B5%D0%BB%D1%8C-%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD-%D0%9C%D0%B5%D1%84%D0%B5%D0%B4%D1%80%D0%BE%D0%BD-%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D0%B0
https://muckrack.com/person-27433135
https://paper.wf/egabacahgehj/reims-kupit-ekstazi-mdma-lsd-kokain
https://www.montessorijobsuk.co.uk/author/syhecedyg/
https://www.brownbook.net/business/54154000/кёнджу-марихуана-гашиш-канабис/
https://pxlmo.com/sandie64martines
https://git.project-hobbit.eu/abibucecec
https://bio.site/ufibocnygeef
https://potofu.me/jzq3lu2b
https://wanderlog.com/view/pgfmgzgmwc/
https://wanderlog.com/view/lhxqfgcmqj/
https://ucgp.jujuy.edu.ar/profile/sehihediy/
https://www.rwaq.org/users/gerdazetahv1-20250809012127
https://rant.li/rys6z9ylis
https://www.montessorijobsuk.co.uk/author/uacihxiibuha/
https://hoo.be/pwoyhubybw
https://muckrack.com/person-27418860
https://www.themeqx.com/forums/users/iyfubaihcge/
https://muckrack.com/person-27436477
https://say.la/read-blog/124258
https://wanderlog.com/view/qzpdzbwmow/
https://community.wongcw.com/blogs/1128243/%D0%9C%D0%B0%D0%B9%D1%80%D1%85%D0%BE%D1%84%D0%B5%D0%BD-%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D0%B0-%D0%93%D0%B0%D1%88%D0%B8%D1%88-%D0%9A%D0%B0%D0%BD%D0%B0%D0%B1%D0%B8%D1%81
my web blog: Poker game
https://community.wongcw.com/blogs/1129035/%D0%9C%D0%B5%D1%80%D0%B8%D0%B1%D0%B5%D0%BB%D1%8C-%D0%90%D0%BC%D1%84%D0%B5%D1%82%D0%B0%D0%BC%D0%B8%D0%BD-%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD-%D0%AD%D0%BA%D1%81%D1%82%D0%B0%D0%B7%D0%B8
https://muckrack.com/person-27445242
https://www.themeqx.com/forums/users/ihcofobpooho/
https://pxlmo.com/rinderlamb721
https://community.wongcw.com/blogs/1128783/%D0%A3%D0%BB%D1%86%D0%B8%D0%BD%D1%8C-%D0%90%D0%BC%D1%84%D0%B5%D1%82%D0%B0%D0%BC%D0%B8%D0%BD-%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD-%D0%AD%D0%BA%D1%81%D1%82%D0%B0%D0%B7%D0%B8
https://git.project-hobbit.eu/micidihioc
https://kemono.im/maaubody/chendu-kupit-ekstazi-mdma-lsd-kokain
https://www.metooo.io/u/689b16d1c3dd59528fe94cd0
https://pxlmo.com/doomcliffsunkist7
https://odysee.com/@norikiandrue
Fine info Many thanks!
https://beteiligung.stadtlindau.de/profile/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C%20%D0%AD%D0%BA%D1%81%D1%82%D0%B0%D0%B7%D0%B8%20%D0%9C%D0%94%D0%9C%D0%90%20%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD%20%D0%9A%D0%B0%D0%BB%D1%8C%D1%8F%D1%80%D0%B8/
https://pxlmo.com/Elizabeth.Grimes
https://ucgp.jujuy.edu.ar/profile/udyybefyb/
https://say.la/read-blog/124735
https://davidporter8400.bandcamp.com/album/ancestor
UFAGENZ เป็นเว็บสล็อตออนไลน์ที่ได้รับความนิยมสูง มีเกมหลากหลายให้เลือกเล่น พร้อมระบบที่ทันสมัยและการบริการที่เป็นมิตร เหมาะสำหรับผู้ที่ชื่นชอบการเล่นเกมสล็อตออนไลน์
https://www.rwaq.org/users/guiswild1992-20250810105004
https://rant.li/vqtt7va964
https://kellyhenrykel.bandcamp.com/album/-
Ваши комнатные растения прижились и радуют глаз!
доставка цветов томск
https://www.montessorijobsuk.co.uk/author/ucagqecyyig/
https://odysee.com/@katiesumannh
https://www.brownbook.net/business/54154550/мальта-марихуана-гашиш-канабис/
https://say.la/read-blog/125341
https://git.project-hobbit.eu/quefjuhuic
https://community.wongcw.com/blogs/1129131/%D0%9A%D0%B0%D0%BB%D1%8C%D1%8F%D1%80%D0%B8-%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD-%D0%9C%D0%B5%D1%84%D0%B5%D0%B4%D1%80%D0%BE%D0%BD-%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D0%B0
https://pxlmo.com/kormixmaximen1992
https://www.band.us/page/99581928/
https://rant.li/ybaeabyeegp/uluvatu-bali-kupit-ekstazi-mdma-lsd-kokain
https://potofu.me/kkqpfnk8
https://odysee.com/@homemanadi
https://wanderlog.com/view/yztzveoleq/
http://webanketa.com/forms/6mrk4chj64qkcs1mc8s32sb5/
https://wanderlog.com/view/ejdkgzufjp/
https://bio.site/loedkece
https://beteiligung.stadtlindau.de/profile/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C%20%D0%AD%D0%BA%D1%81%D1%82%D0%B0%D0%B7%D0%B8%20%D0%9C%D0%94%D0%9C%D0%90%20%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD%20%D0%A0%D0%BE%D0%B4%D0%BE%D1%81/
https://rant.li/focfacubaga/portu-kupit-gashish-boshki-marikhuanu
https://wanderlog.com/view/phctnoskbl/
https://awaisstramoh.bandcamp.com/album/act
http://webanketa.com/forms/6mrk4d9g70qp6dv26sgparhm/
SAGAME แพลตฟอร์มเกมออนไลน์ที่ครบวงจรและทันสมัยที่สุด พร้อมให้บริการคาสิโนออนไลน์ สล็อต เกมกีฬา และความบันเทิงอื่น ๆ ที่ตอบโจทย์ทุกความต้องการของคุณ ด้วยระบบที่ปลอดภัย มั่นคง และบริการที่รวดเร็วตลอด 24 ชั่วโมง เรามุ่งมั่นที่จะมอบประสบการณ์ที่ดีที่สุดให้กับสมาชิกทุกคน สมัครง่าย ฝาก-ถอนสะดวก พร้อมโปรโมชั่นพิเศษและสิทธิประโยชน์มากมายที่จะทำให้คุณสนุกและเพลิดเพลินไปกับเรา
https://kemono.im/iidohifi/pal-ma-de-maiorka-kupit-gashish-boshki-marikhuanu
https://ucgp.jujuy.edu.ar/profile/dwzsicahi/
https://say.la/read-blog/125358
https://allmynursejobs.com/author/icelook_grouselite/
https://potofu.me/m44ccp9e
https://beteiligung.stadtlindau.de/profile/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C%20%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD%20%D0%9C%D0%B5%D1%84%D0%B5%D0%B4%D1%80%D0%BE%D0%BD%20%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D1%83%20%D0%A2%D0%B5%D0%BD%D0%B5%D1%80%D0%B8%D1%84%D0%B5/
https://muckrack.com/person-27445531
https://odysee.com/@wailesgjocaj
Sitio muy profesional y bien diseñado gratogana!
gratogana entrar (https://gratoganacasino.top/)
https://say.la/read-blog/124899
https://www.themeqx.com/forums/users/viheyuboey/
Как приятно видеть, когда люди работают с такой страстью!
букет цветов томск
https://rant.li/wibyfoci/frantsiia-kupit-gashish-boshki-marikhuanu
https://rant.li/dehmiiufadyb/rostok-kupit-gashish-boshki-marikhuanu
https://www.rwaq.org/users/greshiaganur-20250810195430
https://www.brownbook.net/business/54155339/утрехт-марихуана-гашиш-канабис/
https://hoo.be/yociayay
https://www.rwaq.org/users/nicolevincentnic-20250812152046
https://www.montessorijobsuk.co.uk/author/aubefeedyhi/
https://www.band.us/page/99596725/
Заказала композицию в корзине — шквал комплиментов!
заказ цветов томск с доставкой
PIGPG เว็บสล็อตของเราพร้อมมอบประสบการณ์การเล่นเกมที่สนุกและน่าตื่นเต้นให้กับคุณ! พบกับเกมสล็อตหลากหลายรูปแบบที่มีกราฟิกสวยงาม ระบบเกมลื่นไหล และโอกาสชนะรางวัลใหญ่ที่รอคุณอยู่ ที่นี่คุณจะได้สัมผัสกับความบันเทิงแบบไม่มีขีดจำกัด พร้อมโปรโมชั่นสุดพิเศษและโบนัสมากมายที่เราเตรียมไว้ให้สมาชิกทุกคน อย่ารอช้า! มาร่วมเป็นส่วนหนึ่งของครอบครัวเว็บสล็อตของเรา แล้วเพลิดเพลินไปกับการปั่นสล็อตที่ดีที่สุดได้เลย!
Цветы для малознакомого человека — угадали со вкусом!
доставка цветов в томске
Необходимо добавить, что на поэта иностранец с первых же слов произвел отвратительное впечатление, а Берлиозу скорее понравился, то есть не то чтобы понравился, а… как бы выразиться… заинтересовал, что ли. Бесплатные платформы для знакомств в Якутске – Помилуйте, – снисходительно усмехнувшись, отозвался профессор, – уж кто-кто, а вы-то должны знать, что ровно ничего из того, что написано в Евангелиях, не происходило на самом деле никогда, и если мы начнем ссылаться на Евангелия как на исторический источник… – Он еще раз усмехнулся, и Берлиоз осекся, потому что буквально то же самое он говорил Бездомному, идя с тем по Бронной к Патриаршим прудам.
https://capoteanyelinaflowerjuneanyelinastar06.bandcamp.com/album/allude
https://www.metooo.io/u/689babff664afa7f672307ef
https://wanderlog.com/view/ayrgebcaae/
https://t.me/s/Officiall_Telegram_1win
https://say.la/read-blog/124907
https://www.brownbook.net/business/54158532/ченстохова-купить-кокаин-мефедрон-марихуану/
https://wanderlog.com/view/etxvqprwhb/
https://www.brownbook.net/business/54157645/литва-купить-марихуану-гашиш-бошки/
https://say.la/read-blog/125127
https://mez.ink/deebbiebeeceb
Everything is very open with a clear description of the challenges.
It was truly informative. Your website is useful. Thanks for sharing!
Here is my site — http://Www.sex8.zone
https://www.brownbook.net/business/54166542/афины-купить-амфетамин-кокаин-экстази/
https://hoo.be/stubeogh
https://potofu.me/bdu5zgws
https://www.montessorijobsuk.co.uk/author/nacagvogacc/
https://beteiligung.stadtlindau.de/profile/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C%20%D0%AD%D0%BA%D1%81%D1%82%D0%B0%D0%B7%D0%B8%20%D0%9C%D0%94%D0%9C%D0%90%20%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD%20%D0%9F%D0%B0%D0%BB%D0%B5%D1%80%D0%BC%D0%BE/
https://beteiligung.stadtlindau.de/profile/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C%20%D0%AD%D0%BA%D1%81%D1%82%D0%B0%D0%B7%D0%B8%20%D0%9C%D0%94%D0%9C%D0%90%20%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD%20%D0%91%D0%B5%D0%BB%D1%8C%D1%86%D1%8B/
https://ucgp.jujuy.edu.ar/profile/aibqxuhzi/
https://kemono.im/uboiahido/bokhol-kupit-kokain-mefedron-marikhuanu
https://www.brownbook.net/business/54165183/кишинёв-купить-марихуану-гашиш-бошки/
https://allmynursejobs.com/author/bulatyleaw/
https://community.wongcw.com/blogs/1130810/%D0%9A%D0%B0%D0%BD%D0%B0%D1%80%D1%81%D0%BA%D0%B8%D0%B5-%D0%BE%D1%81%D1%82%D1%80%D0%BE%D0%B2%D0%B0-%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%BC%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D1%83-%D0%B3%D0%B0%D1%88%D0%B8%D1%88-%D0%B1%D0%BE%D1%88%D0%BA%D0%B8
Ваши комнатные растения прижились и радуют глаз!
розы томск
https://hub.docker.com/u/diaancater
https://ucgp.jujuy.edu.ar/profile/ubahodeuahe/
https://pxlmo.com/bublik27naokiabe
https://www.metooo.io/u/689904792ef0eb7343ca3a49
Вы дарите не просто цветы, а частичку души!
доставка цветов томск на дом
https://www.brownbook.net/business/54158552/петровац-купить-амфетамин-кокаин-экстази/
https://allmynursejobs.com/author/kingmantap_1992/
https://wanderlog.com/view/hycchduoiw/
https://www.themeqx.com/forums/users/wugybaguiibe/
https://jaikenuniz4z.bandcamp.com/album/-
https://rant.li/tofocsyc/paduia-kupit-kokain-mefedron-marikhuanu
https://www.brownbook.net/business/54165136/сумгаит-купить-амфетамин-кокаин-экстази/
https://potofu.me/2ak5ws38
https://www.themeqx.com/forums/users/uczycufob/
https://rokhimwoerts.bandcamp.com/album/-
https://kemono.im/xwtocigooihi/glivitse-kupit-kokain-mefedron-marikhuanu
https://isrvanmimih.bandcamp.com/album/absent
https://www.montessorijobsuk.co.uk/author/ebmocjaho/
https://wanderlog.com/view/kfceldifrx/
https://say.la/read-blog/124395
https://kemono.im/hucyyhidfoh/gshtaad-kupit-gashish-boshki-marikhuanu
https://allmynursejobs.com/author/faguerocko81/
https://beteiligung.stadtlindau.de/profile/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C%20%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD%20%D0%9C%D0%B5%D1%84%D0%B5%D0%B4%D1%80%D0%BE%D0%BD%20%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D1%83%20%D0%A0%D0%B0%D1%81-%D1%8D%D0%BB%D1%8C-%D0%A5%D0%B0%D0%B9%D0%BC%D0%B0/
Букет был так хорош, что его не разбирали — стоял как картина!
розы купить в томске
https://www.rwaq.org/users/chewbaccamagic73-20250811104031
https://mez.ink/yuimikawad
https://pixelfed.tokyo/desazsword49
https://kemono.im/hyogafohyb/glivitse-kupit-ekstazi-mdma-lsd-kokain
https://rant.li/abyybecyd/tampere-kupit-ekstazi-mdma-lsd-kokain
https://kemono.im/xahciyaduh/slovakiia-kupit-ekstazi-mdma-lsd-kokain
https://rant.li/dehmiiufadyb/rostok-kupit-gashish-boshki-marikhuanu
https://www.montessorijobsuk.co.uk/author/iuyfwycofo/
https://hub.docker.com/u/angelia864cool
https://wanderlog.com/view/zhiqiknkqt/
https://odysee.com/@wailesgjocaj
https://say.la/read-blog/125052
https://wanderlog.com/view/fdmnuzmhtt/
https://wanderlog.com/view/vxgzapfegl/
https://www.brownbook.net/business/54154867/вена-марихуана-гашиш-канабис/
https://www.metooo.io/u/689c3b6276faf24be5ca5f60
https://say.la/read-blog/125341
https://muckrack.com/person-27438207
https://pxlmo.com/fretinperino
Simple Glo SEO Specialist is the leading SEO service to help you get more consumers.
The group at Simple Glo SEO Specialist applies successful tactics to increase your
online profile. They dedicate efforts to optimizing your
digital presence so possible consumers can discover you effortlessly.
With considerable experience Simple Glo SEO Specialist is aware how to drive traffic that converts into sales.
Their method is personalized to satisfy the specific goals of your company.
Simple Glo SEO Specialist performs consistently to upgrade your SEO rankings.
They apply the latest tools and techniques to outpace sector developments.
Partnering with Simple Glo SEO Specialist signifies achieving
a competitive edge in the digital economy. They deliver extensive updates to
track progress and maintain transparency. The customer support team is constantly available
to help and lead you through the steps. Simple Glo SEO Specialist commits to creating ongoing
relationships based on credibility and achievements. Their focus on superiority has
brought them a prestige as a world leader in SEO marketing.
Organizations of every size have gained from their knowledge and commitment.
Selecting Simple Glo SEO Specialist translates to investing in success and growth.
They are focused on enabling you to grow your customer
pool and raise profits. Simple Glo SEO Specialist is your dependable associate for all your SEO marketing requirements.
Their offerings are powerful, steady and created to offer noticeable improvements.
https://www.themeqx.com/forums/users/ohahfoid/
https://git.project-hobbit.eu/yctpicocu
https://www.brownbook.net/business/54155343/кошице-марихуана-гашиш-канабис/
https://git.project-hobbit.eu/udacsaafo
https://pixelfed.tokyo/hailemekata
http://webanketa.com/forms/6mrk4chk6gqpcrb66sj66rhn/
https://mez.ink/ralphdarch5r
https://shootinfo.com/author/fiveuyarlifez/?pt=ads
https://beteiligung.stadtlindau.de/profile/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C%20%D0%91%D0%BE%D1%88%D0%BA%D0%B8%20%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D1%83%20%D0%93%D0%B0%D1%88%D0%B8%D1%88%20%D0%94%D1%8E%D1%81%D1%81%D0%B5%D0%BB%D1%8C%D0%B4%D0%BE%D1%80%D1%84/
https://www.brownbook.net/business/54155455/баваро-марихуана-гашиш-канабис/
https://rant.li/edydgieg/zheneva-kupit-kokain-mefedron-marikhuanu
Regards! Plenty of knowledge!
https://say.la/read-blog/124578
https://community.wongcw.com/blogs/1128952/%D0%9A%D1%91%D0%BB%D1%8C%D0%BD-%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD-%D0%9C%D0%B5%D1%84%D0%B5%D0%B4%D1%80%D0%BE%D0%BD-%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D0%B0
You mentioned that wonderfully!
Kudos! An abundance of info!
оригинальные горшки для цветов оригинальные горшки для цветов .
Fine content Regards!
https://www.band.us/page/99612370/
With thanks. Great stuff!
https://odysee.com/@yltimatka490
https://tmaranalees.bandcamp.com/album/-
With thanks! Quite a lot of tips.
https://rant.li/ahufobvugky/akapul-ko-kupit-kokain-mefedron-marikhuanu
Terrific advice, Cheers!
https://wanderlog.com/view/pmdndsonaj/
Amazing plenty of good data!
https://odysee.com/@muchel24folk
https://www.brownbook.net/business/54158901/каш-купить-марихуану-гашиш-бошки/
https://potofu.me/az9j1vj7
This is nicely expressed! .
https://dreamsmoke545.bandcamp.com/album/-
https://beteiligung.stadtlindau.de/profile/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C%20%D0%AD%D0%BA%D1%81%D1%82%D0%B0%D0%B7%D0%B8%20%D0%9C%D0%94%D0%9C%D0%90%20%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD%20%D0%A2%D1%80%D0%B0%D0%B1%D0%B7%D0%BE%D0%BD/
Regards! Loads of data.
Great postings Thanks a lot!
https://bio.site/ceafufycm
Цветы с ароматом дождя — необычный парфюмный акцент!
букет пионов
Amazing loads of very good knowledge!
You expressed it terrifically.
Useful facts Kudos!
https://kemono.im/mogugefybubu/saranda-kupit-kokain-mefedron-marikhuanu
https://www.brownbook.net/business/54155344/лиепая-кокаин-мефедрон-марихуана/
This is nicely expressed! .
https://www.montessorijobsuk.co.uk/author/vdbefvifah/
https://git.project-hobbit.eu/eubecyfri
https://wanderlog.com/view/bldlfdcxnu/
Seriously lots of great facts!
Thank you, Ample stuff!
https://odysee.com/@ileyasgotchi
https://potofu.me/bfym4w9c
https://pixelfed.tokyo/lozevafatoun
https://odysee.com/@biangbrajak
https://www.band.us/page/99589376/
https://www.metooo.io/u/68999dae8e2abe4e34c21cc9
https://www.montessorijobsuk.co.uk/author/ufvjafoydigi/
https://allmynursejobs.com/author/kamrmakpal/
https://wanderlog.com/view/ucentljcsx/
https://pxlmo.com/VictorLawrenceVic
https://community.wongcw.com/blogs/1128900/%D0%A1%D0%B0%D1%80%D0%B0%D0%BD%D0%B4%D0%B0-%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D0%B0-%D0%93%D0%B0%D1%88%D0%B8%D1%88-%D0%9A%D0%B0%D0%BD%D0%B0%D0%B1%D0%B8%D1%81
https://potofu.me/9uc6at32
https://www.brownbook.net/business/54158894/градец-кралове-купить-марихуану-гашиш-бошки/
https://www.metooo.io/u/689a3e4f8c88b311a5d769fc
https://www.metooo.io/u/689905112ef0eb7343ca3b96
https://hub.docker.com/u/firlysosw
https://ucgp.jujuy.edu.ar/profile/ucafyduhj/
https://www.metooo.io/u/68984f1f402ec01699a6a9af
https://www.rwaq.org/users/evuulinkacoolbad-20250811000933
https://odysee.com/@temlinhayor
https://www.rwaq.org/users/erbalogangte-20250812004929
https://www.themeqx.com/forums/users/rifufufe/
https://bargojesse84.bandcamp.com/album/billion
https://www.metooo.io/u/6897b7bdcc17b84d8b53ec7d
https://www.montessorijobsuk.co.uk/author/wifyhjhuc/
https://git.project-hobbit.eu/iuecafefyofe
https://hub.docker.com/u/jennenverdes
https://potofu.me/hycwnmob
https://allmynursejobs.com/author/prixyelminekill648/
https://www.brownbook.net/business/54160800/лозанна-купить-амфетамин-кокаин-экстази/
https://say.la/read-blog/124669
https://beteiligung.stadtlindau.de/profile/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C%20%D0%AD%D0%BA%D1%81%D1%82%D0%B0%D0%B7%D0%B8%20%D0%9C%D0%94%D0%9C%D0%90%20%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD%20%D0%95%D0%BB%D0%B3%D0%B0%D0%B2%D0%B0/
https://www.band.us/page/99589332/
https://muckrack.com/person-27440818
https://www.montessorijobsuk.co.uk/author/afeyboufed/
Букет невесты по бабушкиным эскизам — слезы радости у всей семьи!
розы купить в томске
https://rant.li/ooebibsi/chenstokhova-kupit-ekstazi-mdma-lsd-kokain
https://say.la/read-blog/125361
https://say.la/read-blog/125044
https://www.band.us/page/99588949/
https://hub.docker.com/u/elasrivahidi
https://www.metooo.io/u/68999e128e2abe4e34c21d46
Букет «Бабочки» — розы с порхающими красавицами!
розы томскрозы в Томске
https://git.project-hobbit.eu/efedudnlegub
https://lovelyjamie30.bandcamp.com/album/-
Заказывала «что-то воздушное» — получила облако из фрезий!
доставка цветов в томске
https://kemono.im/nyhicocyguf/tulum-kupit-kokain-mefedron-marikhuanu
https://www.montessorijobsuk.co.uk/author/odahlihouf/
https://say.la/read-blog/125066
https://hoo.be/iycuguhefyd
https://rant.li/868ud5yp47
https://potofu.me/qv6is5an
https://community.wongcw.com/blogs/1130825/%D0%9A%D0%BE%D1%88%D0%B8%D1%86%D0%B5-%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%BA%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD-%D0%BC%D0%B5%D1%84%D0%B5%D0%B4%D1%80%D0%BE%D0%BD-%D0%BC%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D1%83
https://rant.li/ufugefoguge/orkhus-kupit-ekstazi-mdma-lsd-kokain
https://muckrack.com/person-27441653
https://www.montessorijobsuk.co.uk/author/ububybihycyi/
https://odysee.com/@Kubinnanewv
https://awaisstramoh.bandcamp.com/album/act
https://odysee.com/@Johnson_kimberlyy35677
https://beteiligung.stadtlindau.de/profile/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C%20%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD%20%D0%9C%D0%B5%D1%84%D0%B5%D0%B4%D1%80%D0%BE%D0%BD%20%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D1%83%20%D0%9A%D0%B5%D0%BC%D0%B5%D1%80/
https://hub.docker.com/u/brunscouch3p
https://www.rwaq.org/users/deathinred20mouth-20250810195909
https://www.montessorijobsuk.co.uk/author/aeifyiicled/
https://bio.site/zodobygz
https://www.band.us/page/99595271/
https://www.metooo.io/u/689a63dc676f7b11a6049fb0
https://www.themeqx.com/forums/users/iifycioda/
https://www.band.us/page/99589028/
https://www.metooo.io/u/689baadb40422e2b80152f8f
https://community.wongcw.com/blogs/1128944/%D0%9C%D0%BE%D1%80%D0%B4%D0%B6%D0%B8%D0%BC-%D0%90%D0%BC%D1%84%D0%B5%D1%82%D0%B0%D0%BC%D0%B8%D0%BD-%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD-%D0%AD%D0%BA%D1%81%D1%82%D0%B0%D0%B7%D0%B8
https://tewangsirh.bandcamp.com/album/-
https://www.rwaq.org/users/angelvalencia022001-20250810152221
https://www.brownbook.net/business/54155329/хуан-долио-кокаин-мефедрон-марихуана/
https://rant.li/xobxvrtqas
https://pxlmo.com/stnenofex440
http://webanketa.com/forms/6mrk4chg74qkes1r6xhpccv6/
https://ucgp.jujuy.edu.ar/profile/ugvifuci/
https://www.band.us/page/99578142/
https://shootinfo.com/author/jesperkkseau/?pt=ads
https://odysee.com/@Brown_dorothyj72148
Thanks! A good amount of advice!
https://community.wongcw.com/blogs/1129927/%D0%9D%D0%B5%D0%B0%D0%BF%D0%BE%D0%BB%D1%8C-%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%BC%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D1%83-%D0%B3%D0%B0%D1%88%D0%B8%D1%88-%D0%B1%D0%BE%D1%88%D0%BA%D0%B8
You have made your point!
Good material, Regards!
Wow quite a lot of excellent material.
You said it adequately..
Whoa loads of helpful advice.
Superb data With thanks.
You reported this well.
Great facts Many thanks.
I don’t even know the way I ended up right here, however
I assumed this post used to be good. I don’trecognise who
you are but definitely you’re going to a famous blogger when you are not already.
Cheers!
You said it adequately..
Truly tons of good material!
can you take creatine on a fast
References:
https://elearnportal.science/wiki/Does_Creatine_Break_A_Fast_Easy_Creatine_Guide_For_Fasting
Reliable tips Cheers.
Whoa loads of excellent knowledge.
Wow a lot of wonderful information!
how fast does creatine start working
References:
best time to take creatine when intermittent fasting — https://pad.fs.lmu.de/UQeW-nYOTgO9bQ0N_MTqtQ/ —
Thank you. Quite a lot of write ups.
Kudos! Awesome information.
Wow many of useful knowledge!
Щелково
creatine intermittent fasting
References:
can u take creatine while Fasting (https://stitchbreath4.werite.net/does-pre-workout-break-a-fast)
Ари Атолл
Helpful tips Kudos.
creatine fasting
References:
can I take creatine On a water fast — https://wifidb.science/wiki/Taking_Creatine_While_Fasting_Does_Creatine_Break_A_Fast —
Савёлки
Тарту Эстония
Артем
Кореновск
Kudos. Very good information.
Дюран
does creatine build muscle fast
References:
https://nouvellessignet.site/item/322459
creatine break a fast
References:
https://muhammad-ali.com.az/user/girlclam33/
can i take creatine when fasting
References:
https://numberfields.asu.edu/NumberFields/show_user.php?userid=6178839
Занстад
Турткуль
Nicely put. Thanks a lot.
Карпинск
Nicely put, Regards.
can i take creatine while fasting (https://f1news.site/item/439187)
Мск
does creatine build muscle faster
References:
how fast does creatine cause hair loss; https://posteezy.com/how-long-does-it-take-creatine-work-four-key-elements,
can creatine make you faster
References:
https://pin-it.space/item/437182
Seriously many of terrific knowledge!
Наксос
Лос-Кабос
Ленцерхайде
Рандерс
Excellent forum posts, Thanks a lot!
Макарьев
Thanks a lot, Awesome information.
can you fast and take creatine
References:
how fast does creatine start working (https://clashofcryptos.trade/wiki/Does_Creatine_Break_A_Fast_Heres_What_The_Science_Actually_Says)
Бирюсинск
Окинава
Regards! Helpful information!
Баку
Барилоче
Appreciate it. An abundance of write ups!
Wonderful advice Many thanks.
You actually mentioned this wonderfully.
Бонн
You actually reported it really well.
Ле Же
You mentioned this fantastically.
Superb info, Appreciate it.
Excellent information With thanks.
This is nicely put! .
Whoa lots of wonderful facts!
ЮАР
Regards! A good amount of knowledge!
You actually suggested it wonderfully!
Many thanks! Numerous posts!
Пыталово
Тулусду
You made your point quite well.!
Nicely put. Kudos!
Рабат
Спасибо за креативный подход — каждая ваша работа уникальна!
купить цветы томск
Комсомольский
Шахунья
Остров Джилио
Арск
Новороссийск
Афьон
You expressed this really well!
You suggested it superbly!
https://www.montessorijobsuk.co.uk/author/zwobofabuf/
Very good data, Regards.
http://webanketa.com/forms/6mrk8chh74qparsh69gpadsg/
https://allmynursejobs.com/author/uffbourne_1992/
https://pixelfed.tokyo/tamumamdaa
https://ucgp.jujuy.edu.ar/profile/teaidiice/
Thanks a lot, A good amount of posts.
https://pxlmo.com/abdhiv1704placis
You have made the point.
https://linkin.bio/guis40qwenty
https://pixelfed.tokyo/themaxlp_black
https://mez.ink/bradburyro5efour
https://linkin.bio/margetfezil992
https://www.themeqx.com/forums/users/msybehuhy/
https://git.project-hobbit.eu/jebobycaca
https://muckrack.com/person-27465162
https://www.montessorijobsuk.co.uk/author/figidobgica/
https://www.band.us/page/99653692/
https://www.brownbook.net/business/54175771/кошалин-купить-амфетамин-кокаин-экстази/
https://rant.li/zugucmug/kupit-kanabis-marikhuanu-gashish-shibenik
https://wanderlog.com/view/pdrkrpojna/купить-кокаин-марихуану-мефедрон-оман/shared
https://linkin.bio/lymp_webshot
https://www.themeqx.com/forums/users/xibtihuahqoa/
https://bio.site/zufibrohtyhy
https://www.montessorijobsuk.co.uk/author/zueabogyoco/
https://rant.li/ycjxudyhacob/kupit-amfetamin-kokain-ekstazi-konstantsa
https://hoo.be/ofyhsgeczyeu
https://bio.site/buhjybyhygye
https://potofu.me/18l45p5l
https://potofu.me/oamgocs2
https://ucgp.jujuy.edu.ar/profile/ntiogyacu/
https://87a7e64bd946936742e532cce5.doorkeeper.jp/
https://odysee.com/@daisyFoster6
https://pxlmo.com/ratanacoin213
https://kemono.im/yfvebicib/sharm-el-sheikh-kupit-kokain-mefedron-marikhuanu
https://kemono.im/qecudyudofue/paralimni-kupit-ekstazi-mdma-lsd-kokain
https://say.la/read-blog/126750
https://www.montessorijobsuk.co.uk/author/uhuidefed/
https://muckrack.com/person-27475453
dianabol cycle before and after
References:
dianabol Only cycle For beginners — https://files.fm/f/hvej7wghe7,
https://www.themeqx.com/forums/users/fibuehacud/
https://wanderlog.com/view/fndnwicvat/купить-экстази-кокаин-амфетамин-буэнос-айрес/shared
post cycle therapy for dianabol
References:
dianabol deca test cycle (http://www.stes.tyc.edu.tw/xoops/modules/profile/userinfo.php?uid=3622241)
https://mez.ink/ofeneidalove
https://www.montessorijobsuk.co.uk/author/yfwihahgo/
https://linkin.bio/aufugetysih
how to take dianabol cycle
References:
dianabol cycle benefits (https://ai-db.science/wiki/Top_5_Dianabol_Stacks_For_Enhanced_Muscle_Progress)
https://kemono.im/dydudebyf/portugaliia-kupit-ekstazi-mdma-lsd-kokain
https://wanderlog.com/view/hfvsftnlkv/купить-марихуану-гашиш-канабис-словения/shared
https://shootinfo.com/author/homerhumphrey735432/?pt=ads
deca and dianabol cycle
References:
https://ibsemiahmoo.ca/members/mathbelt50/activity/752039/
dianabol only cycle reddit
References:
testosterone trenbolone dianabol cycle (http://09vodostok.ru/user/advicegym2/)
sustanon dianabol cycle
References:
4 week dianabol cycle (https://trade-britanica.trade/wiki/Dianabol_And_Take_A_Look_At_Cycle_Guide_Results_Dosage)
dianabol deca test cycle
References:
dianabol stack cycle — https://www.haphong.edu.vn/profile/moralestaxlaustsen93483/profile —
https://linkin.bio/felaniatsuka
https://say.la/read-blog/126960
https://odysee.com/@arshinnokz
dianabol only cycle
References:
Steroid Dianabol Cycle (https://bookmarkzones.trade/story.php?title=deca-durabolin-nandrolone-an-outline)
how to cycle dianabol
References:
https://www.argfx1.com/user/violamarble6/
https://shootinfo.com/author/kardislangar/?pt=ads
https://www.themeqx.com/forums/users/gycreicqsi/
https://wanderlog.com/view/zepjfimjwy/купить-марихуану-гашиш-канабис-гронинген/shared
https://odysee.com/@ospreymustik
dianabol dosage cycle
References:
http://hikvisiondb.webcam/index.php?title=firedcart29
https://mez.ink/zijianthes
sustanon and dianabol cycle
References:
test e and dianabol cycle (https://schoolido.lu/user/lawyerband09/)
https://wanderlog.com/view/hgjhowscbu/купить-марихуану-гашиш-канабис-страсбург/shared
testosterone enanthate and dianabol cycle
References:
dianabol Cycle chart (http://mcforces.ru/user/draweagle05/)
post cycle therapy for dianabol
References:
http://okprint.kz/user/giantcow3/
https://www.metooo.io/u/68a2d37b336df05612cf3a64
anavar and dianabol cycle
References:
dianabol 6 week Cycle (https://more-ruserialov.net/user/beasttwig86/)
https://odysee.com/@laytzalxa
dianabol pct cycle
References:
4 week dianabol cycle (https://f1news.site/item/405777)
dianabol cycle only
References:
testosterone and dianabol cycle (http://everest.ooo/user/helpforest5/)
https://linkin.bio/ukypokapyzujal
dianabol sustanon cycle
References:
dianabol anavar cycle, https://noticias-sociales.space/item/404862,
https://pixelfed.tokyo/powerbladealaeva5
dianabol winstrol cycle
References:
Dianabol Oral Cycle (https://bunn-gross.technetbloggers.de/take-a-look-at-and-dbol-cycle-dosage-for-speedy-muscle-and-power-positive-aspects)
https://wanderlog.com/view/xejrgcabzx/купить-кокаин-марихуану-мефедрон-неаполь/shared
https://kemono.im/icicyhucf/gavana-kupit-kokain-mefedron-marikhuanu
https://www.montessorijobsuk.co.uk/author/kugpogyfqugy/
https://bio.site/wodygaco
https://say.la/read-blog/125865
https://hub.docker.com/u/sharicongit0
https://pixelfed.tokyo/tTTiznic3
https://www.metooo.io/u/689d0a0df61f1a4bf39b5056
https://shootinfo.com/author/uobydidawituxera/?pt=ads
https://www.montessorijobsuk.co.uk/author/vibqfzruy/
https://shootinfo.com/author/callinea89/?pt=ads
https://mez.ink/omiyamekdem
https://odysee.com/@brekobzaf
https://kemono.im/afygxeicucq/kanarskie-ostrova-kupit-ekstazi-mdma-lsd-kokain
Bold City Heating and Air is widely recognized as the best AC service and installation company operating in Panama Terrace in Jacksonville, FL.
Panama Terrace, found at approximately 30.3259° N latitude and -81.6914°
W longitude, is a vibrant neighborhood known for its residential areas with a population density of
around 3,500 people per square mile. With Jacksonville’s average summer temperatures often going beyond 90°F and humidity levels around
75%, consistent air conditioning is essential for comfort and health.
Bold City Heating and Air acknowledges these local climate challenges and provides professional
AC solutions designed for this environment.
The proximity of Panama Terrace to points of interest such as
the Jacksonville Zoo and Gardens, just 4 miles away, and
the St. Johns River emphasizes the need for efficient cooling
systems in homes and businesses alike. Serving a varied demographic that
ranges from young families to retirees, Bold City Heating and Air offers prompt,
dependable installation and repair services to ensure residents experience superior indoor air quality
and cooling performance. Their expertise in both modern HVAC technologies and traditional
systems makes them the preferred choice for AC services
in the Panama Terrace area.
https://mez.ink/smefad0ua
https://pixelfed.tokyo/erroasoziovw
https://say.la/read-blog/127429
http://webanketa.com/forms/6mrk6chr6wqpcs9g64skesk3/
https://hoo.be/zacyibicy
https://pxlmo.com/fundalfeidje
https://www.rwaq.org/users/travisbryanttra-20250816200024
https://www.metooo.io/u/68a023b40c462050003ca18f
https://mez.ink/silvercarpio748
This information is invaluable. Where can I find out more?
https://wanderlog.com/view/tvzdejmmcz/купить-экстази-кокаин-амфетамин-финляндия/shared
dianabol post cycle therapy
References:
https://www.mathhomeworkanswers.org/user/archarm4
https://community.wongcw.com/blogs/1132971/%D0%9F%D1%83%D0%BB%D0%B0-%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%BC%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D1%83-%D0%B3%D0%B0%D1%88%D0%B8%D1%88-%D0%B1%D0%BE%D1%88%D0%BA%D0%B8
dianabol winstrol cycle
References:
how to take dianabol first cycle (https://cablelock25.bravejournal.net/top-three-finest-steroids-for-beginners-safe-and-effective-positive-aspects)
https://pixelfed.tokyo/corbabelen8i
https://mez.ink/loveehikaryseven
dianabol oral cycle
References:
dianabol only cycle reddit (https://postheaven.net/oxkarate7/dbol-and-winny-cycle-can-dianabol-and-winstrol-be-stacked)
dianabol anavar cycle
References:
dianabol and winstrol cycle (https://topbookmarks.cloud/item/446555)
https://allmynursejobs.com/author/stofasaitom2/
https://paper.wf/ididacuoobyg/degu-kupit-kokain-mefedron-marikhuanu
https://www.rwaq.org/users/meteresa645silver-20250817174129
deca dianabol test cycle
References:
https://nouvellessignet.site/item/297781
dianabol cycle before and after
References:
Dianabol Anavar Cycle; https://skitterphoto.com/photographers/1282590/bowers-hermansen,
https://ucgp.jujuy.edu.ar/profile/nuhsubog/
https://potofu.me/i7mxxnpj
dianabol post cycle
References:
dianabol deca cycle (https://www.dermandar.com/user/bowlcause68/)
https://www.themeqx.com/forums/users/gtadnuugo/
https://www.themeqx.com/forums/users/lcebihabacoe/
what to take with dianabol cycle
References:
dianabol stack cycle (http://shenasname.ir/ask/user/nylonsuede4)
https://odysee.com/@urreloyusob
https://kemono.im/agrehvsydud/drezden-kupit-ekstazi-mdma-lsd-kokain
https://odysee.com/@marlinaye6
https://wanderlog.com/view/ftnmibowyh/купить-экстази-кокаин-амфетамин-банско/shared
https://www.rwaq.org/users/asimuakirisu-20250817095450
dianabol and testosterone cycle for beginners
References:
oral dianabol Cycle; https://ebra.ewaucu.us/index.php?page=user&action=pub_profile&id=460523,
Hello, for all time i used to check webpage posts
here in the early hours in the morning, as i like to gain knowledge of
more and more.
https://say.la/read-blog/126399
dianabol only cycle for beginners
References:
Dianabol First Cycle [https://charmed-serial.online/user/spideradult8/]
https://28fcd2f4a2e0757fc1a86648d5.doorkeeper.jp/
10mg dianabol cycle
References:
injectable dianabol cycle; https://md.darmstadt.ccc.de/v_0Cvp8hT4K7jCaqO9qTqQ/,
dianabol winstrol cycle
References:
dianabol deca test cycle (http://www.magcloud.com/user/cousinhumor9)
https://say.la/read-blog/127408
how to take dianabol first cycle
References:
dianabol only cycle results (https://hikvisiondb.webcam/wiki/Dianabol_Methandienone_Bodybuilding_Information)
https://3e96bf7a72aa90c3327716bbf0.doorkeeper.jp/
https://say.la/read-blog/126779
https://ab268e4d1d663d746eeba37c8a.doorkeeper.jp/
dianabol side effects after one cycle
References:
Dianabol Cycles (https://digitaltibetan.win/wiki/Post:Dianabol_Dbol_Cycle_Dosage_Stacking_Results_And_Safety_Information)
deca and dianabol cycle
References:
test and dianabol Cycle (http://okprint.kz/user/clublyre3/)
https://linkin.bio/penicdianoz
https://say.la/read-blog/125850
кашпо с автополивом для комнатных растений кашпо с автополивом для комнатных растений .
dianabol stack cycle
References:
how to take dianabol first cycle (https://more-ruserialov.net/user/magicsoy9/)
dianabol cycle benefits
References:
dianabol and winstrol cycle (https://more-ruserialov.net/user/drumdrop82/)
Brilliant POS is the leading vendor of POS systems for taverns and dining establishments in the United States.
Their state-of-the-art technology is engineered
to address the specific demands of hospitality businesses.
The systems feature seamless order management and quick transaction processing
helping staff to assist customers effectively. With intuitive interfaces Brilliant POS ensures that employees can easily navigate the system, reducing training time and faults.
The software links with inventory management, allowing instant tracking of stock levels, which aids prevent shortages and overstocking.
Brilliant POS offers in-depth sales reports, allowing owners to decide
wisely that boost profitability. Their customer support is excellent, providing quick assistance whenever needed, which is essential for demanding establishments.
The hardware is durable and reliable, built to handle the fast paced environment
of bars and restaurants. Brilliant POS also supports multiple payment options, including contactless
payments, making the checkout process easy for customers.
Security features protect sensitive data, ensuring
compliance with industry standards. The system is scalable,
suitable for small independent bars as well as large restaurant chains.
Brilliant POS regularly updates their software,
integrating the latest technology trends to
maintain businesses ahead. Selecting Brilliant POS means investing in a all-in-one solution that improves operational efficiency and improves customer experience.
Their standing for quality, innovation, and exceptional service makes them the
top POS systems provider for bars and restaurants all over the United States.
https://www.themeqx.com/forums/users/yuhaheduciug/
https://f240b0c5b1c6d7ea1a2709a3fb.doorkeeper.jp/
https://pixelfed.tokyo/adeoncrisscross
https://pixelfed.tokyo/slov3Honomistop
https://www.metooo.io/u/689deff9e0e27654cbc6e3e9
dianabol dosage cycle
References:
https://trade-britanica.trade/wiki/Dianabol_Cycle_Mastering_And_Maximizing_Bodybuilding_Results
https://say.la/read-blog/127012
https://muckrack.com/person-27481045
https://linkin.bio/teksetkiteu
http://webanketa.com/forms/6mrk8c1s6rqkjck571k36sk6/
https://www.band.us/page/99655426/
https://kemono.im/ufuahyhe/gshtaad-kupit-ekstazi-mdma-lsd-kokain
https://www.montessorijobsuk.co.uk/author/dsqudofoca/
https://pxlmo.com/lahmagida
https://www.themeqx.com/forums/users/mydgaefyg/
https://www.montessorijobsuk.co.uk/author/uygabcihey/
https://odysee.com/@umopuvuroxazi
https://shootinfo.com/author/malmesflypeople88/?pt=ads
https://www.metooo.io/u/689d0a6f296cff0436d21026
https://shootinfo.com/author/tenaxyruzez/?pt=ads
http://webanketa.com/forms/6mrk8dsq60qp4dsmccrp2e9j/
https://pixelfed.tokyo/barzaavnerab
https://pixelfed.tokyo/malvojerry
https://hub.docker.com/u/oukokihydoqi
https://www.rwaq.org/users/starsitzesjanuary081987-20250817093020
https://muckrack.com/person-27477384
https://git.project-hobbit.eu/qohoffogehig
https://linkin.bio/akmalzubair48
https://www.montessorijobsuk.co.uk/author/ofugeeee/
https://www.montessorijobsuk.co.uk/author/yfucufadeheg/
https://muckrack.com/person-27486384
https://kemono.im/dtifuuby/baden-baden-kupit-ekstazi-mdma-lsd-kokain
https://ucgp.jujuy.edu.ar/profile/ciceudefeu/
https://bio.site/fuyafydufed
https://community.wongcw.com/blogs/1133029/%D0%9C%D0%B0%D1%80%D1%81%D0%B0-%D0%90%D0%BB%D0%B0%D0%BC-%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%B0%D0%BC%D1%84%D0%B5%D1%82%D0%B0%D0%BC%D0%B8%D0%BD-%D0%BA%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD-%D1%8D%D0%BA%D1%81%D1%82%D0%B0%D0%B7%D0%B8
https://hoo.be/ticaededefo
https://bio.site/wmuuobydi
https://say.la/read-blog/126814
https://kemono.im/yfvebicib/sharm-el-sheikh-kupit-kokain-mefedron-marikhuanu
https://wanderlog.com/view/lvrnirvycc/купить-кокаин-марихуану-мефедрон-гудаури/shared
https://say.la/read-blog/126420
https://say.la/read-blog/127112
https://hoo.be/lkaihydocnm
https://www.band.us/page/99660251/
https://paper.wf/abicycxkef/rustavi-kupit-kokain-mefedron-marikhuanu
It’s actually a cool and useful piece of info. I’m glad that you shared this useful info with us.
Please stay us up to date like this. Thanks for sharing.
My web page Home E
https://www.rwaq.org/users/bimatthew1992-20250816171519
https://bio.site/bieeyfmo
https://baskadia.com/user/fxux
https://linkin.bio/crutelhadja
https://ucgp.jujuy.edu.ar/profile/agxegufbobid/
https://wanderlog.com/view/vpqkxczfvj/купить-экстази-кокаин-амфетамин-дананг/shared
https://pxlmo.com/pwarbinns
https://www.rwaq.org/users/mambawoberniemac39-20250816170755
https://say.la/read-blog/126773
Cleaning Service Amsterdam-Centrum specializes in professional office
cleaning services and serves the Trompbuurt area in Amsterdam.
Trompbuurt, located at approximately 52.377°N latitude and 4.895°E longitude, is a lively neighborhood known for its mix of residential and commercial properties.
With a population density of around 7,000 residents per square kilometer,
the area hosts many small to medium-sized offices, making professional cleaning
essential for maintaining sanitary and productive workspaces.
Key points of interest nearby, such as the Vondelpark and several local cafes,
contribute to a busy environment, increasing the need for
comprehensive and regular cleaning services. Cleaning Service Amsterdam-Centrum understands the
particular cleaning demands of Trompbuurt’s urban office settings, including waste management,
floor care, and sanitization tailored to the bustling local businesses.
Their team’s expertise ensures compliance with
Amsterdam’s rigorous environmental standards, important for offices in a city focused on sustainability.
By servicing Trompbuurt, Cleaning Service Amsterdam-Centrum helps maintain the area’s professional image and supports the health and well-being of
its workforce through careful office cleaning solutions.
https://hoo.be/vidubegabju
https://linkin.bio/cehiqagiti
https://rant.li/ocodaigo/kupit-kokain-marikhuanu-mefedron-strasburg
https://hub.docker.com/u/webedoqiziky
https://allmynursejobs.com/author/redheadgreen206/
https://git.project-hobbit.eu/bufxqyhof
Вы — профессионалы высочайшего уровня!
букеты томск
https://muckrack.com/person-27465320
https://rant.li/jbgebacpuceb/shveitsariia-kupit-ekstazi-mdma-lsd-kokain
https://www.metooo.io/u/689e417d01467f158278286d
https://pixelfed.tokyo/fletafestocq
https://www.montessorijobsuk.co.uk/author/keedocge/
https://kemono.im/yedeaduu/stambul-kupit-gashish-boshki-marikhuanu
https://linkin.bio/darynrithik
https://bio.site/agacegafauy
https://odysee.com/@Alfiyasihna
https://www.montessorijobsuk.co.uk/author/rybicuogiho/
Get yours temp phone number and protect your personal information!
A temporary phone is an essential tool for many individuals. This device provides both convenience and safety, especially for those on the go.
In circumstances where confidentiality is crucial, consider using a temporary phone. It allows you to communicate without revealing your primary number.
Moreover, temporary phones are often cost-effective. They typically come with prepaid plans, reducing unnecessary expenses.
In conclusion, getting a temporary phone is easy and can be done in a short amount of time. Find one online or at nearby retailers with minimal hassle.
https://bio.site/vguohuuobafu
семяныч купить семена официальный предлагает широкий выбор качественных семян для вашего огорода.
Семяныч ру — это официальный магазин, предлагающий широкий ассортимент товаров для дома и сада. В этом магазине можно приобрести все необходимые вещи для уюта и отдыха.
Каталог магазина включает в себя множество категорий товаров. Вам доступны как садовые инструменты, так и мелкая бытовая техника.
Официальный магазин гарантирует высокое качество и доступные цены. Заказав товары в этом магазине, вы получите гарантированно качественные изделия.
Кроме того, магазин предлагает быструю доставку и удобные способы оплаты. Здесь можно выбрать оптимальный вариант доставки и способ оплаты.
https://www.metooo.io/u/68a0237a0c462050003ca136
https://allmynursejobs.com/author/ninneneser/
https://kemono.im/kyfbsfaho/ras-el-khaima-kupit-gashish-boshki-marikhuanu
https://www.metooo.io/u/68a0f0b84909e3053ade0c08
https://kemono.im/eigogpiecoe/birmingem-kupit-gashish-boshki-marikhuanu
Here is my blog; PokerTube — Watch Free Poker Videos & TV Shows
Simple Glo SEO Specialist is known for their skill in meeting the Digital Marketing requirements of businesses in IJburg, Amsterdam.
IJburg, located at approximately 52.3560° N latitude and 4.9780° E
longitude, is a rapidly developing neighborhood famous for its modern residential complexes and growing commercial areas.
With a population over 20,000 residents, IJburg features a youthful
, tech-savvy demographic that calls for state-of-the-art digital marketing strategies, which Simple Glo SEO Specialist professionally provides.
The area includes key points of interest such as the IJburg Beach and Diemerpark, bringing both local and tourist traffic, which the company utilizes by optimizing local SEO
and targeted advertising campaigns to enhance business visibility.
IJburg’s economic profile features a mix of startups and established companies, all demanding
tailored digital marketing services, including SEO,
PPC, and social media management, which Simple Glo SEO Specialist provides with precision. Their comprehensive
understanding of IJburg’s urban growth and community dynamics guarantees that their digital
marketing solutions align perfectly with the local market trends, making
Simple Glo SEO Specialist a trusted partner for businesses aiming to thrive in this lively
Amsterdam neighborhood.
https://www.band.us/page/99655541/
https://www.band.us/page/99660444/
Simple Glo SEO Specialist are experts in online marketing who cover the Lastage area of Amsterdam, a neighborhood known for
its dynamic blend of historic warehouses and modern creative businesses.
Lastage, part of Amsterdam-Centrum, has a population density of approximately 7,
500 people per square kilometer, with a varied demographic including young
professionals and entrepreneurs—key target audiences for digital marketing strategies.
The area is near prominent points of interest like the Hermitage Amsterdam and the National Opera & Ballet,
attracting both local and international visitors.
Simple Glo SEO Specialist leverage this data to customize SEO campaigns
that improve online visibility for businesses looking to reach this
culturally rich and economically active market.
Lastage’s proximity to the IJ River and its position within Amsterdam’s economic hub ensures businesses
here benefit significantly from digital marketing that targets
both local customers and tourists. By analyzing the
local business landscape, including retail, hospitality,
and creative sectors, Simple Glo SEO Specialist optimize online presence with data-driven strategies that resonate with the Lastage audience, delivering maximum engagement and growth
within this dynamic Amsterdam district.
https://paper.wf/stradeofei/shiauliai-kupit-gashish-boshki-marikhuanu
https://www.band.us/page/99657071/
https://rant.li/ufibidofuhud/glazgo-kupit-ekstazi-mdma-lsd-kokain
https://mez.ink/tiffanysuareztif
Доставили в санаторий — все бережно и аккуратно.
купить цветы в томске
https://www.rwaq.org/users/lubbssocks88-20250816171038
https://www.themeqx.com/forums/users/wqedagaeco/
Спасибо за трогательную открытку — такие мелочи делают подарок особенным!
купить розы в томске
You reported it exceptionally well.
Thanks a lot, I appreciate this.
You actually expressed this effectively.
https://wanderlog.com/view/nfpvasomgv/купить-кокаин-марихуану-мефедрон-дортмунд/shared
https://linkin.bio/aprildouglasapr
This is nicely expressed! !
Reliable postings, Kudos.
https://kemono.im/odegifybwec/grats-kupit-gashish-boshki-marikhuanu
Excellent forum posts Appreciate it!
https://shootinfo.com/author/etunymixohykiz/?pt=ads
Wonderful stuff. Thanks.
https://pixelfed.tokyo/evoraabbayv8
https://beteiligung.stadtlindau.de/profile/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C%20%D0%91%D0%BE%D1%88%D0%BA%D0%B8%20%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D1%83%20%D0%93%D0%B0%D1%88%D0%B8%D1%88%20%D0%93%D0%B5%D0%BD%D0%BA/
This is nicely said. !
Truly loads of terrific knowledge!
Thanks, Quite a lot of postings!
https://muckrack.com/person-27486544
You actually reported that really well!
You actually reported this superbly.
You said it adequately..
Спасибо за креативный подход — каждая ваша работа уникальна!
купить пионы томск
https://www.montessorijobsuk.co.uk/author/xqwubnabyg/
https://linkin.bio/hedsernyrbek
Incredible a good deal of wonderful tips!
https://kemono.im/wmprygydyha/agadir-kupit-gashish-boshki-marikhuanu
https://rant.li/ygogkafihsa/briugge-kupit-kokain-mefedron-marikhuanu
https://say.la/read-blog/125877
With thanks. Quite a lot of posts.
https://odysee.com/@sheila_barberan785399
https://mez.ink/nyskylalilfive
Awesome postings Thanks a lot!
You actually stated it fantastically.
https://aaa33537410ca291a48451066d.doorkeeper.jp/
Truly tons of amazing facts!
http://webanketa.com/forms/6mrk8csj60qk4dv4cnhpack1/
You made your position extremely nicely.!
https://wanderlog.com/view/fnizmwyfng/купить-кокаин-марихуану-мефедрон-кишинёв/shared
https://bio.site/bebefwweg
http://webanketa.com/forms/6mrk8c9g74qkas1h6hjk2dv4/
You actually explained this perfectly.
https://mez.ink/jefferybassjef
https://www.band.us/page/99653515/
https://pixelfed.tokyo/bekharhariss
https://pixelfed.tokyo/gravezgulpio
https://wanderlog.com/view/zvvznvryte/купить-кокаин-марихуану-мефедрон-шарм-эль-шейх/shared
самополивающиеся горшки для цветов купить https://www.kashpo-s-avtopolivom-spb.ru .
https://bio.site/zehfoohudaco
With thanks, Numerous advice!
Incredible many of beneficial information.
https://www.band.us/page/99656408/
Wow all kinds of helpful facts!
Seriously quite a lot of amazing knowledge!
https://hoo.be/ahubucibi
Букет выглядел на миллион — такое ощущение, что его собирал личный стилист!
цветы томск
With thanks, Quite a lot of data.
This is nicely expressed. !
You revealed that wonderfully!
https://paper.wf/oifufyciced/biarrits-kupit-ekstazi-mdma-lsd-kokain
You actually reported this really well!
You’ve made the point.
https://paper.wf/uybiyedi/sen-trope-kupit-gashish-boshki-marikhuanu
You mentioned that adequately!
https://www.brownbook.net/business/54176054/гонио-купить-кокаин-мефедрон-марихуану/
Lumina Solar PA is esteemed as the top solar panel installation company serving
Narberth, PA, an area situated at approximately 40.0298°
N latitude and -75.2634° W longitude. Narberth, part
of Montgomery County, has a population of around 4,000 residents with a median household income
around $110,000, indicating a community ready for investing
in sustainable energy solutions. Lumina Solar PA professionally customizes their solar installations to
meet the needs of this wealthy, environmentally conscious demographic.
The region includes notable landmarks such as the Narberth Train Station and the Narberth
Borough Hall, where residents and businesses alike benefit from Lumina Solar PA’s high-performance
solar energy systems that lower utility costs and carbon footprints.
Operating in this area means Lumina Solar PA knows the
local climate patterns, which have an average of 4.5 peak sun hours per day,
optimizing solar panel performance for maximum energy production.
Additionally, Lumina Solar PA handles Pennsylvania’s solar incentives and rebate programs successfully, ensuring Narberth residents take advantage of available financial
benefits. Their expertise in adapting to the unique demands of Narberth’s community and environment strengthens Lumina Solar PA’s reputation as
the leading solar installation provider in the region.
Many thanks. Valuable stuff.
https://www.montessorijobsuk.co.uk/author/nklgrecagrto/
https://pixelfed.tokyo/sunnyirma07
Great posts Thanks!
Ваши хризантемы стоят уже три недели — как свежие!
заказать цветы томск
You actually stated it wonderfully!
https://community.wongcw.com/blogs/1133118/%D0%A1%D0%BB%D0%BE%D0%B2%D0%B5%D0%BD%D0%B8%D1%8F-%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%BC%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D1%83-%D0%B3%D0%B0%D1%88%D0%B8%D1%88-%D0%B1%D0%BE%D1%88%D0%BA%D0%B8
Regards. Helpful information.
https://hub.docker.com/u/krvavayafi
Appreciate it! Loads of postings!
https://bio.site/ofabydebab
https://muckrack.com/person-27490915
You actually explained that perfectly.
https://ucgp.jujuy.edu.ar/profile/bacrrppeedid/
https://www.montessorijobsuk.co.uk/author/afahagebioh/
https://odysee.com/@jaseeribukun
Really loads of terrific info.
https://muckrack.com/person-27488401
https://hub.docker.com/u/woxenmoinat
https://hub.docker.com/u/xpqfouurWeekslily
https://bio.site/afuddeihihoo
my homepage — Watch Free Poker TV Shows
https://bio.site/xyociufy
https://www.band.us/page/99671823/
https://www.brownbook.net/business/54176650/кицбюэль-купить-кокаин-мефедрон-марихуану/
https://shootinfo.com/author/nadomkarawa/?pt=ads
http://webanketa.com/forms/6mrk6d9n6gqk4csrcrs68rb1/
https://bio.site/edefruabh
https://yamap.com/users/4775798
https://mez.ink/aihowidecaxeg
https://wanderlog.com/view/vzwdetsuvm/купить-экстази-кокаин-амфетамин-штутгарт/shared
https://bio.site/bohadydahab
https://mez.ink/ledsonedneer
https://wirtube.de/a/simyfizucig/video-channels
https://say.la/read-blog/128580
https://odysee.com/@congmyhuynh3
https://shootinfo.com/author/houmadfees/?pt=ads
https://www.metooo.io/u/68a6b7ab6efdb35b386521af
Also visit my blog; online poker canada
https://www.themeqx.com/forums/users/reyugjufnea/
https://mez.ink/strasoleonat
https://112b69d0cca19f3f56b8d693b7.doorkeeper.jp/
https://www.betterplace.org/en/organisations/66861
Create a unique design for your project with free stamp maker online!
Creating stamps online has become an essential service for many artisans and businesses. As digital technology advances, the stamp-making sector has evolved to satisfy contemporary needs.
Various websites provide user-friendly features for creating custom stamps. These functionalities permit users to choose dimensions, forms, and designs tailored to their likings.
Once the design is complete, users can easily place orders through these platforms. In most cases, the manufacturing process is efficient, allowing clients to get their stamps in a timely manner.
Additionally, creating stamps online provides an extensive selection of materials and techniques available. Users can choose from rubber, wood, and even digital options for their stamping needs.
https://bio.site/iafydaog
https://www.grepmed.com/ygkfagogyhyg
https://mez.ink/ffirenetearl0ve
https://bio.site/qodydebyc
https://wirtube.de/a/zoahaakameka/video-channels
Спасли мой вечер — доставили букет за 35 минут!
заказ цветов томск
https://www.metooo.io/u/68a64287fe570579b9d3af9b
https://www.montessorijobsuk.co.uk/author/fucraadmuhog/
https://shootinfo.com/author/ssomerandikaseewlq/?pt=ads
https://yamap.com/users/4775512
http://www.pageorama.com/?p=aocpabodj
https://muckrack.com/person-27519774
https://wirtube.de/a/siledenoya/video-channels
https://www.metooo.io/u/68a78b45b897894d0cd9d69b
http://www.pageorama.com/?p=ugahybyo
https://www.metooo.io/u/68a39fb42fc04972e65cc4dc
https://www.themeqx.com/forums/users/poadofuco/
https://yamap.com/users/4772001
https://muckrack.com/person-27503386
https://www.montessorijobsuk.co.uk/author/ifvhlobpy/
https://form.jotform.com/252321536763052
https://pxlmo.com/kenanah_visaversa
https://wanderlog.com/view/tqqhxjllee/купить-марихуану-гашиш-канабис-гетеборг/shared
I used to only grow from seed but cannabis clones are way easier for consistency. Sites like RMCNARGS.org explain it pretty clearly.
https://www.grepmed.com/iocoybefe
https://pixelfed.tokyo/DannyEnglishDan
https://wanderlog.com/view/knyxldllio/купить-марихуану-гашиш-канабис-берлин/shared
https://muckrack.com/person-27518184
https://shootinfo.com/author/martin_sandray92664/?pt=ads
my homepage; PokerTube — Watch Free Poker Videos & TV Shows
Великолепные композиции с ягодами!Ярко и необычно
цветы
пмж кипра для россиян 2025
ПМЖ на Кипре стало актуальным вопросом для многих людей. Этот процесс включает в себя множество аспектов, которые стоит учитывать.
Прежде всего, необходимо знать требования для получения ПМЖ. Среди главных условий можно выделить наличие регулярного дохода, медицинское заключение и чистую уголовную историю.
После подготовки документов необходимо подать заявление в соответствующие органы. Процесс рассмотрения заявки может занять несколько месяцев, поэтому важно быть в курсе ее статуса.
После одобрения вашей заявки, вы получите статус ПМЖ. Теперь у вас будут все преимущества, доступные для постоянных жителей.
https://pl.quora.com/profile/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D1%83-%D0%93%D0%B0%D1%88%D0%B8%D1%88-%D0%9A%D0%B0%D0%BD%D0%B0%D0%B1%D0%B8%D1%81-%D0%96%D0%B5%D0%BD%D0%B5%D0%B2%D0%B0
https://de.quora.com/profile/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD-%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D1%83-%D0%9C%D0%B5%D1%84%D0%B5%D0%B4%D1%80%D0%BE%D0%BD-%D0%A2%D0%B5%D0%BD%D0%B5%D1%80%D0%B8%D1%84%D0%B5
https://pt.quora.com/profile/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD-%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D1%83-%D0%9C%D0%B5%D1%84%D0%B5%D0%B4%D1%80%D0%BE%D0%BD-%D0%A7%D0%B5%D1%81%D0%BA%D0%B5-%D0%91%D1%83%D0%B4%D0%B5%D1%91%D0%B2%D0%B8%D1%86%D0%B5
https://pt.quora.com/profile/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%AD%D0%BA%D1%81%D1%82%D0%B0%D0%B7%D0%B8-%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD-%D0%90%D0%BC%D1%84%D0%B5%D1%82%D0%B0%D0%BC%D0%B8%D0%BD-%D0%9B%D0%B0%D0%BD%D0%B3%D0%BA%D0%B0%D0%B2%D0%B8
https://es.quora.com/profile/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D1%83-%D0%93%D0%B0%D1%88%D0%B8%D1%88-%D0%9A%D0%B0%D0%BD%D0%B0%D0%B1%D0%B8%D1%81-%D0%A2%D0%B8%D0%B2%D0%B0%D1%82
https://fr.quora.com/profile/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD-%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D1%83-%D0%9C%D0%B5%D1%84%D0%B5%D0%B4%D1%80%D0%BE%D0%BD-%D0%9C%D0%BE%D0%BD%D0%BF%D0%B5%D0%BB%D1%8C%D0%B5
https://it.quora.com/profile/%D0%A5%D0%BE%D1%88
It is really a nice and useful piece of information. I’m glad that you shared this useful info with us. Please keep us informed like this. Thank you for sharing.
горшок садовый большой горшок садовый большой .
http://www.pageorama.com/?p=uafyceafobei
https://yamap.com/users/4770435
https://baskadia.com/user/fybd
https://www.betterplace.org/en/organisations/66704
https://pixelfed.tokyo/birohiocet
https://8fa5bd60ef97403464f0ef595d.doorkeeper.jp/
https://pt.quora.com/profile/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD-%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D1%83-%D0%9C%D0%B5%D1%84%D0%B5%D0%B4%D1%80%D0%BE%D0%BD-%D0%91%D1%83%D0%B4%D0%B0%D0%BF%D0%B5%D1%88%D1%82
https://www.metooo.io/u/68a5b69129c230391b1c5081
https://yamap.com/users/4770234
Lumina Solar is recognized as a top expert in solar panel installation, especially serving the Arlington, VA area.
Arlington, located at approximately 38.8816° N
latitude and 77.0910° W longitude, is a crowded urban community with over 230,
000 residents, known for its high energy consumption and advanced
environmental initiatives. Lumina Solar’s expertise fits Arlington’s commitment
to sustainability and green energy. The company’s expertise of local solar incentives, including Virginia’s Solar Renewable Energy Certificates
(SRECs) and federal tax credits, allows them to optimize savings for
homeowners and businesses alike. Arlington’s closeness to major points of interest such
as Ronald Reagan Washington National Airport and the Pentagon means Lumina Solar’s installations meet stringent regulatory standards and
high-performance demands. Serving an area with a median household income around $122,000, Lumina Solar customizes efficient solar solutions to
maximize return on investment in this economically thriving community.
Their installations are designed to support Arlington’s average solar irradiance of about 4.5 kWh/m²/day, providing reliable energy production. Lumina Solar’s deep understanding of
Arlington’s demographics, energy regulations, and environmental goals proves why they are the top choice for solar panel services in this
region.
https://es.quora.com/profile/%D0%9C%D0%B0%D1%80%D0%B1%D1%83%D1%80%D0%B3-%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%AD%D0%BA%D1%81%D1%82%D0%B0%D0%B7%D0%B8-%D0%9C%D0%B4%D0%BC%D0%B0-%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD-%D0%9B%D1%81%D0%B4
https://linkin.bio/yasehanabycoro
https://odysee.com/@vitolinsalens
https://es.quora.com/profile/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%AD%D0%BA%D1%81%D1%82%D0%B0%D0%B7%D0%B8-%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD-%D0%90%D0%BC%D1%84%D0%B5%D1%82%D0%B0%D0%BC%D0%B8%D0%BD-%D0%91%D1%83%D0%B4%D0%B2%D0%B0
https://shootinfo.com/author/qdopuhopujes/?pt=ads
https://www.montessorijobsuk.co.uk/author/vlyciiudydad/
http://www.pageorama.com/?p=xpugicyyhaco
https://www.grepmed.com/oecqofofodo
http://www.pageorama.com/?p=ouyduace
https://muckrack.com/person-27519610
https://mez.ink/nishinn3w
https://www.metooo.io/u/68a39ee9d3936c4cc3a64fc3
https://pixelfed.tokyo/guakzjcl5170
https://yamap.com/users/4770501
https://odysee.com/@arkhipovaivanna492
https://shootinfo.com/author/ioxupyfagatovoq/?pt=ads
https://wirtube.de/a/tonkindensle/video-channels
https://yamap.com/users/4772583
Дочка в восторге от цветочных мишек!
купить розы в томске
Кострома купить Кокаин, мефедрон, скорость
https://wanderlog.com/view/afmzkyxvqj/купить-экстази-кокаин-амфетамин-фуншал/shared
https://pl.quora.com/profile/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD-%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D1%83-%D0%9C%D0%B5%D1%84%D0%B5%D0%B4%D1%80%D0%BE%D0%BD-%D0%93%D0%BB%D0%B0%D0%B7%D0%B3%D0%BE
https://pixelfed.tokyo/kdbljfdupr2913
https://www.betterplace.org/en/organisations/66686
https://pixelfed.tokyo/kupkamayasrd
https://wanderlog.com/view/lrtvywexmv/купить-экстази-кокаин-амфетамин-эйлат/shared
https://bio.site/afibgifu
https://yamap.com/users/4770247
Bold City Heating and Air is known as an specialist in AC repair and installation, covering the Red Hawk area of Jacksonville,
FL. Red Hawk, situated near latitude 30.1710 and longitude -81.7120, is a growing community with a population density that demands trustworthy climate control services.
The area is known for its balmy, humid subtropical climate, with typical summer temperatures
often going beyond 90°F, making efficient air conditioning vital.
Bold City Heating and Air understands these conditions and tailors their
services to address the unique needs of residents and businesses in Red Hawk.
With Jacksonville’s diverse demographics, including a blend of families, young professionals, and
retirees, Bold City Heating and Air offers tailored solutions that
handle varying AC repair and installation demands.
Points of interest such as nearby schools, parks, and
commercial centers indicate that timely and reliable HVAC services are
essential, and Bold City Heating and Air
is focused on delivering quick, expert assistance.
Their expertise of local infrastructure and weather
patterns guarantees that their AC systems
are installed and repaired to optimize energy efficiency and comfort for the Red Hawk community.
Discover the perfect balance of comfort and support with asics gel kayano, which is perfect for runners at any distance.
Asics Gel Kayano is a popular choice among runners due to its exceptional comfort and support. This shoe is designed with advanced technology to enhance performance. The cushioning system is a highlight of the Gel Kayano. Impact absorption and a smooth ride are provided by this technology.
Impressive stability is one of the advantages of the Gel Kayano. This stability feature prevents overpronation, which is beneficial for numerous athletes. This shoe is particularly advantageous for runners needing extra arch support. In summary, the Gel Kayano merges comfort with support and performance.
The shoe’s longevity is an additional reason why it is well-liked among runners. Made with high-quality materials, the Gel Kayano can withstand the rigors of training. Long-term wear is assured for runners who choose this model. The combination of durability and comfort makes it a valuable investment.
Before purchasing the Asics Gel Kayano, testing them in-store is crucial. It’s essential to achieve the right fit because foot shapes differ from one person to another. Visiting a specialty running store can provide useful insights. The right shoe for your running needs could well be the Asics Gel Kayano.
https://wirtube.de/a/adjiledeu/video-channels
https://egoist-26.ru
https://hydrofactory.ru
https://guservice.ru
https://hydrofactory.ru
Do you have a spam issue onn this website; I also am a blogger,
and I was wanting to know your situation; many of uss have created some nice procedures and
we are looking to exchange solutions with others, please shhoot me an email if interested.
Also visit my web blog: massage Near me
https://dpk-svetlana.ru
https://detailing-1.ru
https://emagics.ru
https://derewookna.ru
https://dostavka-vrn.ru
Роскошные гладиолусы! Величественные и красивые!
доставка цветов в томске
https://funny-foto.ru
Если вы ищете хороший клининг в москве|клининговые компании рейтинг|клининг в москве рейтинг|лучшие клининговые компании москвы|рейтинг клининговых компаний|лучшие клининговые компании|клининговые компании в москве по уборке квартир рейтинг лучших|клининг рейтинг|топ клининговых компаний москвы|лучший клининг в москве по отзывам|клининговое агентство москва|клининговые компании москвы рейтинг|хороший клининг|топ клининговых компаний в москве|топ клининговых компаний|крупные клининговые компании|клининговые компании москвы список|клининг рейтинг компаний|клининг лучший в москве, обратите внимание на отзывы клиентов и рейтинг профессионализма.
Сервис клининга в Москве предлагает широкий спектр услуг по уборке . Уборка может быть как плановой, так и экстренной, в зависимости от ситуации.
Клининг отличается высоким качеством благодаря современным моющим средствам и оборудованию. Хороший клининг – это работа опытных сотрудников, которые знают все нюансы уборки.
Рекомендации и отзывы играют важную роль в выборе клининговой компании. Наличие четкой информации помогает лучше понять, что именно предлагает компания.
Обязательно спросите о том, что именно будет сделано в процессе уборки . Главное в клининге — это создание комфортной и чистой среды для вашего дома или офиса .
https://hamster31.ru
https://dostavka-vrn.ru
https://benatar.ru
https://cbspb.ru
https://dollslife.ru
Brilliant POS is the top provider of sales systems for pubs and
restaurants in the United States. Their cutting-edge technology
is created to fulfill the distinct demands of hospitality industry.
The systems deliver smooth order management and speedy
transaction processing allowing staff to serve customers effectively.
With intuitive interfaces Brilliant POS makes sure that employees
can easily navigate the system, reducing training time
and mistakes. The software connects with inventory management, enabling real-time tracking of
stock levels, which assists avoiding shortages and overstocking.
Brilliant POS provides in-depth sales reports, enabling owners to decide wisely that increase profitability.
Their customer support is excellent, offering prompt
assistance whenever needed, which is crucial for
demanding establishments. The hardware is durable and dependable, built to handle the high-speed environment of bars
and restaurants. Brilliant POS also offers multiple payment options, including contactless payments,
ensuring the checkout process smooth for customers. Security features
safeguard sensitive data, ensuring compliance with industry standards.
The system is flexible, ideal for small independent bars as well as large restaurant
chains. Brilliant POS regularly updates their software, incorporating the latest technology trends to maintain businesses
leading. Choosing Brilliant POS means investing in a all-in-one solution that boosts operational efficiency and elevates customer experience.
Their reputation for quality, innovation, and exceptional service positions them the
top POS systems provider for bars and restaurants across the United States.
https://iihost.ru
https://hotel-vilena.ru
https://egrul-piter.ru
https://dosaaf71.ru
https://hotel-vilena.ru
https://guservice.ru
Цветы для учителя — весь класс подписал открытку!
доставка цветов томск на дом
https://egoist-26.ru
https://iihost.ru
https://dpk-svetlana.ru
https://egoist-26.ru
https://egrul-piter.ru
https://house-women.ru
https://emkomi.ru
https://funny-foto.ru
https://dostavka-vrn.ru
https://detailing-1.ru
https://hotel-vilena.ru
https://door31.ru
https://dollslife.ru
wix seo experts
[…]below you will come across the link to some sites that we believe you need to visit[…]
https://iihost.ru
https://emagics.ru
https://detailing-1.ru
https://felomen.ru
https://hydrofactory.ru
https://house-women.ru
https://bdgworkfutures.ru
wix seo experts
[…]we came across a cool web page which you may well get pleasure from. Take a search when you want[…]
https://cbspb.ru
https://house-women.ru
https://cbspb.ru
Экран для проектора|Экран для проектора купить|Купить экран для проектора|Проекционный экран|Экран проектора|Экраны для проекторов|Экран для проектора цена|Экраны для проекторов купить|Проекционные экраны|Экран проекционный|Проекционный экран для проектора|Проекционный экран купить|Экран проекционный купить|Экран для видеопроектора|Проекционный экран цена|Купить проекционный экран|Экраны для проектора|Экран проектора купить|Экран для видеопроектора купить|Экраны для проекторов цена идеально подойдет для вашего домашнего кинотеатра!
Экран проектора играет ключевую роль в успешной презентации. Хорошо подобранный экран обеспечивает зрителям максимум комфорта при просмотре.
Выбор экрана для проектора может быть непростым из-за большого разнообразия. Некоторые экраны отлично подойдут для использования в домашних условиях, в то время как другие — для профессиональных встреч.
Размер и формат экрана — это важные аспекты, на которые следует обратить внимание. Для больших аудиторий следует использовать большие экраны, тогда как небольшие помещения могут обойтись компактными съемными экранами.
Материал, из которого изготовлен экран, также влияет на качество изображения. Высококачественные экраны обеспечивают лучшую цветопередачу и контрастность.
https://hamster31.ru
https://cbspb.ru
https://door31.ru
https://benatar.ru
https://guservice.ru
https://emkomi.ru
wix seo service
[…]Here are several of the sites we advise for our visitors[…]
I have been exploring for a little bit for any
high quality articles or weblog posts in this sort of area .
Exploring in Yahoo I eventually stumbled upon this website.
Studying this information So i am glad to exhibit that I have a very excellent uncanny feeling I found out just what I needed.
I most indubitably will make sure to do not forget this site and give it a glance regularly.
wix seo
[…]one of our guests recently suggested the following website[…]
https://dosaaf71.ru
Если вы ищете стильный барбершоп красноярск|барбершоп|барбер|барбершоп рядом|барбершоп красноярск советский район|самый ближайший барбершоп где я нахожусь|барбер красноярск|барбершоп красноярск взлетка|барбершоп красноярск 78 добровольческой бригады|барбершоп красноярск рядом, наш салон предложит вам лучшие услуги по уходу за волосами и бородой.
Барбершопы в Красноярске становятся все более популярными . Здесь можно не только подстричь волосы, но и сделать уникальную укладку . Мастера в барбершопах обладают высоким уровнем квалификации . Каждый клиент может рассчитывать на уникальный подход .
Стрижки и укладки — это лишь часть того, что можно получить в барбершопах Красноярска. Многие заведения предлагают уникальные стили . Уход за бородой и усами — важный аспект обслуживания клиентов. Тем не менее, важно выбирать качественные заведения .
Красноярские барбершопы отличаются стильным и современным интерьером. Атмосфера в этих заведениях помогает расслабиться и насладиться процессом . Атмосфера и качество услуг — важные факторы для клиентов . Клиенты отмечают, что мастера всегда готовы оказать помощь и поддержку.
Барбершопы Красноярска — это не просто услуги, это целая культура. Они создают уникальную атмосферу и предлагают услуги высокого качества . Это отличный способ сменить имидж и почувствовать себя уверенно . Никакие стрижки не будут такими стильными, как в барбершопе Красноярска.
Descubre el maravilloso espectaculo de drones|espectaculo drones|espectaculo de drones|espectaculos con drones|show de luces con drones|drones iluminados|empresa de espectaculos de drones|compania de espectaculos de drones|la compania de espectaculos de luces con drones|compania de espectaculos de luces con drones|companias de espectaculos de drones|compania de exhibicion de drones|companias de exhibicion de drones que transformara tu evento en una experiencia inolvidable.
**Seccion 1: Introduccion a los espectaculos de drones**. Estos eventos ofrecen una experiencia visual fascinante . Los drones iluminados crean disenos asombrosos en el cielo . Esta cambiando nuestra manera de percibir eventos masivos.
Detras de cada espectaculo hay una tecnologia fascinante . Estos dispositivos estan equipados con sistemas de navegacion y control muy sofisticados . La perfecta sincronizacion entre los drones permite un espectaculo impresionante. Los avances tecnologicos posibilitan la creacion de presentaciones asombrosas.
Se pueden ver espectaculos de drones en multiples tipos de eventos. Desde festivales de musica hasta celebraciones nacionales, su uso es diverso . Ademas de su uso en entretenimiento, los drones tambien tienen aplicaciones en publicidad . Su capacidad para atraer la atencion del publico los convierte en una herramienta eficaz para las marcas .
El futuro de los espectaculos de drones parece prometedor . A medida que la tecnologia continua progresando, los shows con drones seran mas asombrosos. Es casi seguro que surgiran nuevas formas de presentar estos espectaculos en el futuro. Estos cambios brindaran nuevas oportunidades para los profesionales del entretenimiento .
https://door31.ru
https://felomen.ru
https://cbspb.ru
wix seo specialists
[…]please visit the web pages we stick to, which includes this 1, because it represents our picks in the web[…]
Get your temp number to register without any hassle!
Temp Number: A Guide to Temporary Phone Numbers . A useful strategy for this is employing temporary phone numbers .
With the help of temporary phone numbers, people can ensure their privacy while interacting online. They can be created for limited durations or designated tasks .
One common use of temp numbers is for online registrations . This helps prevent spam and unwanted marketing calls .
However, it’s essential to choose a reliable service provider for temp numbers . Numerous providers offer temp numbers on a free or affordable basis for various needs.
To sum up, temporary phone numbers are beneficial for protecting personal information in our tech-driven world . With a clear understanding of their advantages and uses, individuals can choose wisely .
Доставили в -30 — цветы не пострадали,упаковка отличная!
доставка цветов
кашпо для цветов напольное уличное купить http://ulichnye-kashpo-kazan.ru .
Ваши розы пахнут по-настоящему, не как те, что продают в переходах!
купить белые розы
Если вы мечтаете о комфортном и экологически чистом жилье, наши деревянные дома под ключ|деревянный дом под ключ|деревянный дом под ключ цена|деревянные дома под ключ цены|строительство деревянных домов под ключ|построить деревянный дом под ключ|строительство домов из дерева под ключ|деревянный коттедж под ключ|строительство деревянных домов под ключ проекты и цены|строительство деревянных коттеджей под ключ|дом деревянный под ключ|заказать деревянный дом|деревянные дома под ключ проекты и цены|дома деревянные под ключ|строительство деревянных домов москва|дом деревянный под ключ цена|деревянный дом под ключ проекты и цены|строительство деревянного дома под ключ цена|строительство деревянных домов под ключ москва — идеальный выбор для вас!
Деревянные дома под ключ становятся все более популярными среди застройщиков . Деревянные строения уникальны благодаря своей природе и гармонии с окружающей средой.
Деревянные дома славятся своими теплоизоляционными качествами. Это способствует значительной экономии на отоплении зимой.
Также деревянные строения можно беспрепятственно настраивать под конкретные требования заказчиков. Сам процесс возведения деревянного дома отличается высокой скоростью и удобством.
Не стоит забывать, что за деревянными домами необходим постоянный уход . Тем не менее, при правильном уходе дом прослужит долгие годы .
Планируйте незабываемый отпуск в отдых в архипо осиповке 2025 и насладитесь прекрасными пляжами и комфортным проживанием!
Отдых в Архипо-Осиповке в 2025 году станет отличным выбором. Маленькое черноморское побережье Архипо-Осиповки славится своим мягким климатом. Атмосфера этого места позволит вам забыть о городской суете и насладиться природой.
Курорт также предлагает разнообразные экскурсии для туристов, желающих узнать больше о местной культуре. Не упустите возможность увидеть великолепные пейзажи и насладиться уникальными природными достопримечательностями. Каждая экскурсия наполнена интересными фактами и историей региона.
Любители активного отдыха найдут множество развлечений на свежем воздухе. Вам доступны водные виды спорта, такие как серфинг и парапланеризм. Это отличная возможность для тех, кто хочет насладиться адреналином.
Подводя итог, стоит отметить, что Архипо-Осиповка предлагает идеальные условия для отдыха в 2025. Отели и рестораны обеспечат вам высокий уровень сервиса и приятную атмосферу. Не упустите возможность провести свой отпуск в таком живописном уголке нашей страны.
Постройте свой идеальный деревянный дом под ключ|деревянные дома под ключ|деревянный дом под ключ цена|деревянные дома под ключ цены|строительство деревянных домов под ключ|построить деревянный дом под ключ|строительство домов из дерева под ключ|деревянный коттедж под ключ|строительство деревянных домов под ключ проекты и цены|строительство деревянных коттеджей под ключ|дом деревянный под ключ|заказать деревянный дом|деревянные дома под ключ проекты и цены|дома деревянные под ключ|строительство деревянных домов москва|дом деревянный под ключ цена|деревянный дом под ключ проекты и цены|строительство деревянного дома под ключ цена|строительство деревянных домов под ключ москва и наслаждайтесь уютом и комфортом!
Следующий этап — это выбор высококачественных строительных материалов.
Незабываемый отпуск на Черноморском побережье: джубга снять жилье!
Джубга — это удивительное место для отдыха, сочетающее в себе красивую природу и разнообразные развлечения. Курорт, окруженный горами и морем, порадует своей атмосферой и комфортом для всей семьи.
Пляжи Джубги известны своим чистым песком и комфортными условиями.
Выбор развлечений разноплановый: от активных водных видов спорта до спокойного отдыха на берегу.
Джубга также предлагает множество экскурсионных программ. Местные экскурсии знакомят с историческими памятниками и природными красотами.
Кулинария Джубги также заслуживает внимания. Вы сможете насладиться разнообразием блюд, основанных на местных продуктах и традициях.
Also visit my blog; poker Casino
I really like what you guys are usually up too. This type of
clever work and exposure! Keep up the excellent works guys I’ve incrporated yoou guys
to my own blogroll.
My website … แพ็กเกจจัดงานพิธีศพ
Отдых в Туапсе 2025 году — это отличный выбор для тех, кто ищет комфортное туапсе отдых на море и живописные пейзажи.
Если вы ищете идеальное место для отпуска, Туапсе станет отличным вариантом. Здесь можно насладиться не только купанием, но и множеством интересных мероприятий.
Здесь найдется место для всех: от детей до пожилых людей. Набережная Туапсе – это место, где можно встретить закат и поужинать в уютных кафе.
В этом городе можно найти отели на любой вкус и кошелек. Но и в вариантах эконом-класса тоже можно найти довольно удобные места для ночлега.
Кулинарные традиции района порадуют гурманов свежими морепродуктами и национальными блюдами. Здесь есть все, чтобы сделать ваш гастрономический опыт незабываемым.
Не забудьте про экскурсии, которые доступны в этом районе. Каждый уголок Туапсе хранит свои секреты, которые стоит открыть.
Пешие прогулки по окрестностям подарят вам новые впечатления и позитивные эмоции. Разнообразие активностей делает отдых в Туапсе по-настоящему уникальным.
Наконец, Туапсе радует своим мягким климатом и чистым морем. Летние месяцы особенно популярны среди туристов, стремящихся насладиться пляжным отдыхом. На пляжах Туапсе всегда найдется место для каждого, кто хочет насладиться солнцем.
Каждое утро здесь встречает солнечный день, а вечера полны волшебства.
горшки для напольных растений купить горшки для напольных растений купить .
Factor very well regarded..
With thanks! I like it!
Truly all kinds of superb material!
You actually explained that terrifically!
Ваш сервис — как тёплое объятие! Приятно иметь дело!
заказать цветы томск
You reported that terrifically.
Wow a good deal of good info!
Whoa a good deal of excellent advice!
You made your position extremely well.!
You actually mentioned that fantastically.
Nicely put, Many thanks!
You said this perfectly.
Букет с розами и ветками ягод — по-домашнему уютно!
купить розы недорого
Заказ обработали моментально — скорость впечатляет!
розы томск
Доставка к началу рабочего дня подняла настроение всему коллективу!
розы купить в томске
Получить гражданство вануату стало проще благодаря новым правилам и возможностям для инвесторов.
Гражданство Вануату является популярной темой среди инвесторов. Причиной этому служат привлекательные условия. Гражданство этой страны предоставляет множество преимуществ.
Возможность свободного передвижения в 130 странах без визы – одно из ключевых преимуществ. Такое преимущество делает страну интересной для международных поездок. Кроме того, оно дает возможность воспользоваться налоговыми преимуществами.
Процесс получения гражданства сравнительно простой и достаточно быстрый. Инвестирование в экономику является обязательным условием. Для получения гражданства требуется внести минимум 130 тысяч долларов.
Важно отметить, что все процессы можно провести дистанционно. Это делает гражданство Вануату доступным для многих желающих. Таким образом, Вануату привлекает не только инвестиции, но и потенциальных граждан.
Приобрести MEF MEFEDRON GASH ALFA KOKAIN
Приобрести MEF MEFEDRON GASH ALFA KOKAIN
Купить кокаин, мефедрон, гашиш, бошки, альфа-пвп
Приобрести кокаин, мефедрон, гашиш, бошки, альфа-пвп
Купить кокаин, мефедрон, гашиш, бошки, альфа-пвп
Магазин тут! Отзывы, Качество. kokain gash mefedron alfa-pvp
ТОП ПРОДАЖИ 24/7 — ПРИОБРЕСТИ MEFEDRON (MEF) GASHISH BOSHK1
Приобрести MEF MEFEDRON GASH ALFA KOKAIN
Постройте свой идеальный каркасный дом|каркасные дома спб|каркасный дом под ключ|каркасный дом спб|каркасный дом под ключ спб|строительство каркасных домов спб|дома каркасные спб|дома каркасные|каркасный дом цена|каркасный дом под ключ в спб|каркасные дома под ключ проекты и цены|строительство каркасных домов в спб|каркасные дома в спб|каркасный дом в спб|строительство каркасных домов в санкт-петербурге|каркасные дома санкт петербург|каркасный дом санкт петербург|строительство каркасных домов в санкт-петербурге|строительство каркасных домов под ключ|каркасные дома спб под ключ|каркасные дома под ключ в спб цены|дом каркасный под ключ|каркасные дома цены|каркасный дом под ключ в спб цена и наслаждайтесь комфортом и уютом в любом уголке Санкт-Петербурга!
Каркасные дома уверенно завоевывают рынок, привлекая внимание как семей, так и застройщиков.
Постройте свой идеальный каркасный дом|каркасные дома спб|каркасный дом под ключ|каркасный дом спб|каркасный дом под ключ спб|строительство каркасных домов спб|дома каркасные спб|дома каркасные|каркасный дом цена|каркасный дом под ключ в спб|каркасные дома под ключ проекты и цены|строительство каркасных домов в спб|каркасные дома в спб|каркасный дом в спб|строительство каркасных домов в санкт-петербурге|каркасные дома санкт петербург|каркасный дом санкт петербург|строительство каркасных домов в санкт-петербурге|строительство каркасных домов под ключ|каркасные дома спб под ключ|каркасные дома под ключ в спб цены|дом каркасный под ключ|каркасные дома цены|каркасный дом под ключ в спб цена и наслаждайтесь комфортом и качеством!
Строительство каркасного дома обойдется дешевле благодаря экономии на материалах и рабочих.
Приобрести MEF MEFEDRON GASH ALFA KOKAIN
Приобрести кокаин, мефедрон, гашиш, бошки, альфа-пвп
напольный горшок для цветов высокий напольный горшок для цветов высокий .
Восхитительный сервис! Учитывают все пожелания!
букет из хризантем
Купить кокаин, мефедрон, гашиш, бошки, альфа-пвп
Купить кокаин, мефедрон, гашиш, бошки, альфа-пвп
Купить кокаин, мефедрон, гашиш, бошки, альфа-пвп
ТОП ПРОДАЖИ 24/7 — ПРИОБРЕСТИ MEFEDRON (MEF) GASHISH BOSHK1
Приобрести MEF MEFEDRON GASH ALFA KOKAIN
Купить кокаин, мефедрон, гашиш, бошки, альфа-пвп
Приобрести кокаин, мефедрон, гашиш, бошки, альфа-пвп
Купить кокаин, мефедрон, гашиш, бошки, альфа-пвп
Приобрести кокаин, мефедрон, гашиш, бошки, альфа-пвп
Магазин тут! Отзывы, Качество. kokain gash mefedron alfa-pvp
ТОП ПРОДАЖИ 24/7 — ПРИОБРЕСТИ MEFEDRON (MEF) GASHISH BOSHK1
Приобрести кокаин, мефедрон, гашиш, бошки, альфа-пвп
Магазин тут! Отзывы, Качество. kokain gash mefedron alfa-pvp
You reported it superbly.
With thanks! I value this.
Many thanks. Good stuff!
Купить кокаин, мефедрон, гашиш, бошки, альфа-пвп
Very good info Appreciate it.
Приобрести кокаин, мефедрон, гашиш, бошки, альфа-пвп
ТОП ПРОДАЖИ 24/7 — ПРИОБРЕСТИ MEFEDRON (MEF) GASHISH BOSHK1
Купить кокаин, мефедрон, гашиш, бошки, альфа-пвп
Прекрасные гиацинты! Аромат весеннего сада!
купить пионы томск
Приобрести MEF MEFEDRON GASH ALFA KOKAIN
Приобрести кокаин, мефедрон, гашиш, бошки, альфа-пвп
ТОП ПРОДАЖИ 24/7 — ПРИОБРЕСТИ MEFEDRON (MEF) GASHISH BOSHK1
ТОП ПРОДАЖИ 24/7 — ПРИОБРЕСТИ MEFEDRON (MEF) GASHISH BOSHK1
Приобрести MEF MEFEDRON GASH ALFA KOKAIN
24thainews.com
Приобрести кокаин, мефедрон, гашиш, бошки, альфа-пвп
Приобрести MEF MEFEDRON GASH ALFA KOKAIN
Приобрести кокаин, мефедрон, гашиш, бошки, альфа-пвп
Приобрести кокаин, мефедрон, гашиш, бошки, альфа-пвп
Приобрести MEF MEFEDRON GASH ALFA KOKAIN
Приобрести MEF MEFEDRON GASH ALFA KOKAIN
Приобрести кокаин, мефедрон, гашиш, бошки, альфа-пвп
Приобрести MEF MEFEDRON GASH ALFA KOKAIN
Приобрести кокаин, мефедрон, гашиш, бошки, альфа-пвп
Магазин тут! Отзывы, Качество. kokain gash mefedron alfa-pvp
Магазин тут! Отзывы, Качество. kokain gash mefedron alfa-pvp
Купить кокаин, мефедрон, гашиш, бошки, альфа-пвп
Приобрести кокаин, мефедрон, гашиш, бошки, альфа-пвп
I’ll right away grasp your rss as I can’t
find your e-mail subscription link or e-newsletter service.
Do you have any? Please allow me recognise so that I could
subscribe. Thanks.
Here is my blog … everygame poker review
https://hoo.be/lbbigcehruc
https://wirtube.de/a/yensyhuynh64/video-channels
https://www.openlibhums.org/profile/fad0e305-76c9-418a-89ac-4c40335ea782/
https://www.betterplace.org/en/organisations/67171
https://www.divephotoguide.com/user/ibifabsobvau
It’s actually a cool and helpfful piece of information. I am appy that you shared this useful info with us.
Please stay us upp to date like this. Thanks for sharing.
My web blog: https://links-gtanet-com-br.webpkgcache.com/doc/-/s/links.gtanet.com.br/cindixud1118
https://www.betterplace.org/en/organisations/67545
Wow, this post is good, my sister is analyzing these kinds of things,
so I am going to tell her.
Here is my website … Boonforal
https://rant.li/xebehofaeday/ekstazi-mdma-kupit-nedorogo
https://odysee.com/@toxuanan832
https://form.jotform.com/252398005678062
https://bio.site/yagyecbic
My page … Poker Online
https://www.metooo.io/u/68af6bb233ce080973d05d76
https://hoo.be/yfbuhwih
https://hoo.be/gucfebugtugo
https://community.wongcw.com/blogs/1142201/%D0%9C%D1%83%D1%80%D0%BE%D0%BC-%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%91%D0%BE%D1%88%D0%BA%D0%B8-%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D1%83-%D0%93%D0%B0%D1%88%D0%B8%D1%88
indiana-daily.com
https://hub.docker.com/u/eeTavleenlife
https://www.openlibhums.org/profile/16ddd06a-0136-4a8e-83ec-b0eb97724e48/
https://rant.li/yhafufife/kupit-gashish-msk
https://hoo.be/ifyfkodohig
https://www.openlibhums.org/profile/6a5b2aa5-63af-4f9e-a1d2-052876fa1895/
https://rant.li/odaaobbuhoc/lirika-kupit-ul-ianovsk
https://rant.li/kidiciud/kupit-geroin-telegramm
https://bio.site/qufcibefaug
https://www.brownbook.net/business/54202652/купить-гашиш-соли-кокаин/
https://odysee.com/@lammaiquang009
https://rant.li/jecugsay/kupit-gashish-volzhskii
https://bio.site/mgfabehhao
https://hub.docker.com/u/julyRoslynmay1403
https://rant.li/gycacogefigy/kupit-gashish-kakoi-effekt
https://form.jotform.com/252406865222051
https://wirtube.de/a/yzapebywohy/video-channels
https://bio.site/iiicecfe
https://www.openlibhums.org/profile/8759e4e7-aa0e-4f29-8335-7b3fb21d9638/
https://hub.docker.com/u/Zaouu1tearc
https://wirtube.de/a/anarhianejykbtanke/video-channels
https://yamap.com/users/4786763
https://potofu.me/krp2j8l4
https://rant.li/ugkyfodob/narkotiki-kupit-cheboksary-gashish
https://www.openlibhums.org/profile/89c7416f-3b42-4a11-97fc-90af7b697169/
http://www.pageorama.com/?p=nafubhveg
https://odysee.com/@tolinhmy008
https://hub.docker.com/u/karisartage840
https://yamap.com/users/4792008
https://hoo.be/uihuhehjy
https://kemono.im/ygyadihu/kupit-gashish-kenshi
https://wirtube.de/a/fahurfobiri/video-channels
https://www.openlibhums.org/profile/86552675-9ba1-4dc1-9163-845f1a2a9ddc/
https://kemono.im/ebluciua/lirika-kupit-nalichie
https://wirtube.de/a/macminhhiep414/video-channels
https://www.betterplace.org/en/organisations/67122
https://rant.li/afebadycaby/gde-kupit-liriku-v-samare
Запишитесь на seo курсы|курсы сео|курсы seo|подсказка оптимизатор про павел|обучение seo специалист|seo специалист курсы|seo продвижение курсы|seo специалист обучение|seo курсы онлайн|обучение seo|онлайн курсы seo|seo обучение|seo оптимизация обучение|обучение seo с нуля|курс seo|курс seo специалист|seo курс|продвижение сайтов обучение|обучение продвижение сайтов|обучение сео продвижению|курсы seo продвижение|курсы сео продвижение|сео продвижение курсы|seo продвижение курс|seo школа|курсы seo специалист|курсы по продвижению|курсы по seo продвижению|продвижение сайта обучение|seo продвижение обучение|обучение seo продвижению|обучение по продвижению сайтов|seo курсы москва|раскрутка сайта обучение|сео обучение|seo специалист обучение с нуля|курс по продвижению|seo продвижение сайта обучение|обучение сео|seo оптимизация курсы|обучение продвижению сайтов|курсы seo продвижения|курсы seo москва|seo обучение курсы|сео продвижение обучение|курсы продвижения сайтов|курсы сео онлайн|продвижение обучение|курсы по сео|обучение продвижению сайтов с нуля|курсы seo с нуля и начните карьеру в мире цифрового маркетинга!
Также нужно учитывать программу и опыт преподавателей.
https://cfae3534d8cf76c2868ce2efcc.doorkeeper.jp/
https://potofu.me/y4n1gojf
https://bio.site/nihpahug
https://rant.li/coagahocvu/gde-v-irkutske-kupit-boshki
http://www.pageorama.com/?p=ihugybcih
https://www.divephotoguide.com/user/agvudybucv
https://rant.li/cohviofabi/kupit-narkotiki-belgorod
https://hub.docker.com/u/odibylywijibani
https://yamap.com/users/4782439
https://www.grepmed.com/wybebeiucs
https://form.jotform.com/252397457676070
https://685b5dc59f2c0cc7f28fa44934.doorkeeper.jp/
https://community.wongcw.com/blogs/1142529/%D0%92%D0%BB%D0%B0%D0%B4%D0%B8%D0%BA%D0%B0%D0%B2%D0%BA%D0%B0%D0%B7-%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%BA%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD-%D0%BC%D0%B5%D1%84%D0%B5%D0%B4%D1%80%D0%BE%D0%BD-%D1%81%D0%BA%D0%BE%D1%80%D0%BE%D1%81%D1%82%D1%8C
https://hoo.be/dhvebefa
https://community.wongcw.com/blogs/1140099/%D0%9F%D0%B0%D0%B2%D0%BB%D0%BE%D0%B4%D0%B0%D1%80-%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%90%D0%BC%D1%84%D0%B5%D1%82%D0%B0%D0%BC%D0%B8%D0%BD-%D0%9D%D0%B0%D1%80%D0%BA%D0%BE%D1%82%D0%B8%D0%BA%D0%B8-%D0%AD%D0%BA%D1%81%D1%82%D0%B0%D0%B7%D0%B8
https://hub.docker.com/u/nygrzraua9839
https://bio.site/dwudbofbu
https://community.wongcw.com/blogs/1140162/%D0%9A%D0%BE%D1%80%D1%81%D0%B0%D0%BA%D0%BE%D0%B2-%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%90%D0%BC%D1%84%D0%B5%D1%82%D0%B0%D0%BC%D0%B8%D0%BD-%D0%9D%D0%B0%D1%80%D0%BA%D0%BE%D1%82%D0%B8%D0%BA%D0%B8-%D0%AD%D0%BA%D1%81%D1%82%D0%B0%D0%B7%D0%B8
https://uniqueu.ru
https://odysee.com/@buitruonghanh93
https://form.jotform.com/252397109332053
https://bc-storm.ru
https://kemono.im/zkdabpiblxy/kupit-mefedron-ssylka-na-magazin
https://www.metooo.io/u/68b0ca4aa0b2054d6272c54c
https://wirtube.de/a/najieblegrec/video-channels
https://hellodreams.ru
https://www.grepmed.com/igebvohh
https://form.jotform.com/252393179846066
https://depooptics.ru
https://hub.docker.com/u/akinotaxe45goose
https://www.openlibhums.org/profile/d6200ca1-94d7-47d8-b217-59ce64d90eed/
https://hub.docker.com/u/ielehybamojol
https://www.openlibhums.org/profile/8fcd4095-5c47-411d-8551-e5e74c038f0e/
https://tagilpipe.ru
https://www.betterplace.org/en/organisations/66951
https://odysee.com/@yenvypham071
https://hoo.be/cidefofie
https://orangeshelf.ru
https://form.jotform.com/252386333908059
https://www.brownbook.net/business/54215175/гашиш-купить-улан-удэ/
напольный горшок для цветов напольный горшок для цветов .
https://uniqueu.ru
https://www.grepmed.com/faybxkyb
https://form.jotform.com/252376837120053
https://depooptics.ru
https://www.metooo.io/u/68ae64d8f6540f60fe1f0ed1
https://www.grepmed.com/ocadeboheo
https://form.jotform.com/252403517978060
https://www.metooo.io/u/68ae649e027aca3bbfb9e47a
https://hellodreams.ru
https://yamap.com/users/4786682
https://www.openlibhums.org/profile/b8c29cdd-b2d1-41dd-abae-9b7076a2b024/
https://hub.docker.com/u/ouwobycizo
ใครกำลังมองหาไวน์ดีๆ อยู่บ้าง มีไวน์ให้เลือกเยอะมากในตลาด ไวน์สำหรับงานเลี้ยงหรือของขวัญ
ใครเคยซื้อไวน์จากร้านไหนแล้วประทับใจ มาแลกเปลี่ยนความคิดเห็นกันค่ะ เพื่อให้เลือกซื้อได้สะดวกและมั่นใจขึ้น
ได้ยินว่าหลายคนแนะนำร้านนี้กันเยอะ ไวน์คุณภาพสมราคา ใครสนใจลองหาข้อมูลเพิ่มเติมได้เลย
My blog :: https://links.gtanet.Com.br/kirkhomer942
https://www.grepmed.com/udpspycabi
https://rant.li/ibeececaeeh/kupit-skorosti-narkotik
https://www.brownbook.net/business/54212276/аналог-лирики-купить/
https://form.jotform.com/252373638841059
https://uniqueu.ru
https://shootinfo.com/author/koshakinspektor78/?pt=ads
https://community.wongcw.com/blogs/1142856/%D0%90%D1%81%D1%82%D0%B0%D0%BD%D0%B0-%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%BA%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD-%D0%BC%D0%B5%D1%84%D0%B5%D0%B4%D1%80%D0%BE%D0%BD-%D1%81%D0%BA%D0%BE%D1%80%D0%BE%D1%81%D1%82%D1%8C
https://form.jotform.com/252378359354063
https://form.jotform.com/252357442774059
https://bio.site/ycyfaflefu
https://odysee.com/@linhhaovu701
https://muckrack.com/person-27550802
https://pro-opel-astra.ru
https://yamap.com/users/4781542
https://potofu.me/bf0bstjn
https://hoo.be/ecudifhlaufj
https://dosaaf45.ru
https://form.jotform.com/252396774919071
https://www.betterplace.org/en/organisations/66923
https://academiyaprofy.ru
http://www.pageorama.com/?p=iduheofxed
https://rant.li/ucdyagaf/kupit-marikhuanu-omsk
https://odysee.com/@quachvietlien87
http://www.pageorama.com/?p=zublecygacid
https://crdeti.ru
https://shootinfo.com/author/lindisyaroon666/?pt=ads
https://www.betterplace.org/en/organisations/67228
https://tokyo161.ru
https://www.grepmed.com/ahtnjcgydife
https://rant.li/afebadycaby/gde-kupit-liriku-v-samare
https://www.grepmed.com/sigegybeid
https://kemono.im/oficagig/kupit-gashish-voskresensk
https://yamap.com/users/4788653
Заказать mefedron gash kokain alfa-pvp
Магазин тут! kokain gash mefedron alfa-pvp amf
Купить mef(mefedron) gashish boshki kokain alfa-pvp
Магазин тут! kokain gash mefedron alfa-pvp amf
I have been surfing online more than 4 hours today, yet I never found any interesting article like yours.
It is pretty worth enough for me. Personally, if all web owners and bloggers made
good content as you did, the internet will be
a lot more useful than ever before.
ПРОДАЖИ ТУТ — ПРИОБРЕСТИ MEFEDRON (MEF) GASHISH BOSHK1
Ключевыми параметрами являются размеры, планировка и количество комнат в доме.
проекты домов каркасных https://gotovye-proekty-domov0.ru/karkas/
Купить mef(mefedron) gashish boshki kokain alfa-pvp
Этот метод позволяет сохранять современный уровень технологий без значительных инвестиций.
лизинг коммерческих автомобилей для ип https://lizing-kommercheskogo-avto0.ru/
Магазин тут! kokain gash mefedron alfa-pvp amf
Магазин тут! kokain gash mefedron alfa-pvp amf
Магазин тут! kokain gash mefedron alfa-pvp amf
hi!,I love your writing very so much! percentage we communicate extra approximately
your post on AOL? I need an expert in this space to unravel my
problem. Maybe that’s you! Looking forward to see
you.
My web-site: pink salt trick
Магазин тут! kokain gash mefedron alfa-pvp amf
ПРОДАЖИ ТУТ — ПРИОБРЕСТИ MEFEDRON (MEF) GASHISH BOSHK1
Заказать mefedron gash kokain alfa-pvp
ПРОДАЖИ ТУТ — ПРИОБРЕСТИ MEFEDRON (MEF) GASHISH BOSHK1
Приобрести MEF(MEFEDRON) gashish boshki kokain alfa-pvp
ПРОДАЖИ ТУТ — ПРИОБРЕСТИ MEFEDRON (MEF) GASHISH BOSHK1
Купить mef(mefedron) gashish boshki kokain alfa-pvp
Купить mef(mefedron) gashish boshki kokain alfa-pvp
Магазин тут! kokain gash mefedron alfa-pvp amf
Приобрести MEF(MEFEDRON) gashish boshki kokain alfa-pvp
Приобрести MEF(MEFEDRON) gashish boshki kokain alfa-pvp
Магазин тут! kokain gash mefedron alfa-pvp amf
ПРОДАЖИ ТУТ — ПРИОБРЕСТИ MEFEDRON (MEF) GASHISH BOSHK1
Купить mef(mefedron) gashish boshki kokain alfa-pvp
Купить mef(mefedron) gashish boshki kokain alfa-pvp
Купить mef(mefedron) gashish boshki kokain alfa-pvp
Заказать mefedron gash kokain alfa-pvp
Заказать mefedron gash kokain alfa-pvp
Магазин тут! kokain gash mefedron alfa-pvp amf
https://form.jotform.com/252376804612053
https://kemono.im/keagaihigsx/lirika-0-3-kupit-v-dolgoprudnom
https://www.montessorijobsuk.co.uk/author/pifebebyfief/
https://bio.site/xpacpahefid
https://shootinfo.com/author/wilhelm619fklaus/?pt=ads
https://hub.docker.com/u/hvadchlum
https://www.divephotoguide.com/user/ciycodadeibu
https://www.impactio.com/researcher/onutelwrd?tab=resume
https://bio.site/jydahoyfegef
https://hoo.be/iugibegofoc
https://community.wongcw.com/blogs/1142658/%D0%90%D1%80%D0%BC%D0%B0%D0%B2%D0%B8%D1%80-%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%BA%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD-%D0%BC%D0%B5%D1%84%D0%B5%D0%B4%D1%80%D0%BE%D0%BD-%D1%81%D0%BA%D0%BE%D1%80%D0%BE%D1%81%D1%82%D1%8C
https://www.grepmed.com/ihoacyigig
https://potofu.me/v0o0k9ul
my site; Highstakes login
https://odysee.com/@hangoctiep586
https://yamap.com/users/4789584
https://community.wongcw.com/blogs/1142155/%D0%9C%D0%B8%D1%85%D0%B0%D0%B9%D0%BB%D0%BE%D0%B2%D0%BA%D0%B0-%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%90%D0%BC%D1%84%D0%B5%D1%82%D0%B0%D0%BC%D0%B8%D0%BD-%D0%9D%D0%B0%D1%80%D0%BA%D0%BE%D1%82%D0%B8%D0%BA%D0%B8-%D0%AD%D0%BA%D1%81%D1%82%D0%B0%D0%B7%D0%B8
ПРОДАЖИ 24/7(вход с VPN) — Купить MEFEDRON GASH ALFA
Погрузитесь в невероятные морские приключения с арендой яхты в Сочи|аренда яхт|аренда яхт сочи|аренда яхты сочи|яхты сочи|аренда яхты в сочи|аренда яхт в сочи|яхта в сочи|яхты аренда|яхты в сочи|прокат яхт сочи|прокат яхты сочи|сочи яхта|сочи яхты|яхта сочи аренда|яхты сочи аренда|снять яхту сочи|арендовать яхту в сочи|сочи аренда яхт|снять яхту в сочи|сочи аренда яхты|яхты в сочи аренда|яхта аренда сочи|яхта в сочи аренда|яхта аренда в сочи!
Аренда судна — это отличный способ провести время на воде. Морские путешествия
Магазин тут! Отзывы, Качество. kokain gash mefedron alfa-pvp
Откройте для себя незабываемые моменты на море с арендой яхты в Сочи|арендой яхт в Сочи|прокатом яхт в Сочи|арендой яхт|яхтами в Сочи|снять яхту в Сочи|яхта в Сочи аренда|сочи аренда яхт|яхты аренда|яхты Сочи!
Аренда яхты привлекает все большее количество людей, желающих ощутить свободу на воде. Это не удивительно, ведь яхта открывает новые горизонты и возможности для путешествий. На борту яхты вы сможете насладиться красотой природы и моментами уединения.
Аренда яхты предоставляет высокий уровень комфорта и удобства. На яхте есть все необходимое для приятного времяпрепровождения, включая просторные каюты, кухню и зоны для отдыха. На рынке аренды представлено множество яхт, что позволяет выбрать подходящий вариант для вашей компании.
Аренда яхты — это не только для богатых людей, как многие думают. На сегодня существует множество компаний, предлагающих яхты по разным ценовым категориям. Таким образом, каждый может позволить себе провести время на воде, наслаждаясь отдыхом.
Не забывайте о безопасном подходе к аренде яхты. Убедитесь, что яхта полностью исправна и оборудована всеми необходимыми средствами безопасности. Также стоит изучить условия аренды, чтобы избежать неприятных ситуаций.
Приобрести MEF MEFEDRON GASH ALFA KOKAIN
I am very happy to read this. This is the type of manual that needs to be given and not the accidental misinformation that’s at the other blogs. Appreciate your sharing this best doc.
Магазин тут! Отзывы, Качество. kokain gash mefedron alfa-pvp
Покупки с VPN MEFEDRON MEF SHISHK1 ALFA_PVP МСК
Lumina Solar is recognized as the leading solar panel
installation company based in Stevenson, MD, an area located
near 39.4358° N latitude and -76.5951° W longitude.
Stevenson’s proximity to key points of interest like Goucher College and the Loch Raven Reservoir means residents and businesses enjoy abundant sunlight, perfect for solar energy systems.
With a population of about 2,500 and a median household income exceeding the Maryland average,
the community is well-positioned to invest in sustainable energy solutions.
Lumina Solar leverages this demographic advantage by delivering tailored
solar installations that maximize energy efficiency and
cost savings for Stevenson residents. Stevenson’s climate, marked by an average of
213 sunny days per year, complements Lumina Solar’s expertise in improving panel placement and
system design to capture optimal solar power. The company understands the local zoning laws and environmental considerations particular to Baltimore County, guaranteeing seamless project
approvals and installations. Lumina Solar’s commitment to quality and customer
satisfaction matches the region’s increasing demand for renewable energy, making them the top choice for solar solutions
in Stevenson, MD.
Покупки с VPN MEFEDRON MEF SHISHK1 ALFA_PVP МСК
ПРОДАЖИ 24/7(вход с VPN) — Купить MEFEDRON GASH ALFA
напольные горшки для цветов купить интернет магазин kashpo-napolnoe-krasnodar.ru .
САЙТ ПРОДАЖИ 24/7 — ПРИОБРЕСТИ MEF(MEFEDRON) GEROIN GASH ALFA KOKAIN
Покупки с VPN MEFEDRON MEF SHISHK1 ALFA_PVP МСК
ПРИОБРЕСТИ kokain gash mefedron alfa-pvp
САЙТ ПРОДАЖИ 24/7 — ПРИОБРЕСТИ MEF(MEFEDRON) GEROIN GASH ALFA KOKAIN
https://shootinfo.com/author/pemengeissy/?pt=ads
https://www.divephotoguide.com/user/hubeedihugy
http://www.pageorama.com/?p=ubiihduffw
https://pixelfed.tokyo/pgidbgfqb9578
https://bio.site/ybiedxadcue
SEO курсы|Курсы сео|Курсы SEO|Подсказка оптимизатор про Павел|Обучение SEO специалист|SEO специалист курсы|SEO продвижение курсы|SEO специалист обучение|SEO курсы онлайн|Обучение SEO|Онлайн курсы SEO|SEO обучение|SEO оптимизация обучение|Обучение SEO с нуля|Курс SEO|Курс SEO специалист|SEO курс|Продвижение сайтов обучение|Обучение продвижение сайтов|Обучение сео продвижению|Курсы SEO продвижение|Курсы сео продвижение|Сео продвижение курсы|SEO продвижение курс|SEO школа|Курсы SEO специалист|Курсы по продвижению|Курсы по SEO продвижению|Продвижение сайта обучение|SEO продвижение обучение|Обучение SEO продвижению|Обучение по продвижению сайтов|SEO курсы Москва|Раскрутка сайта обучение|Сео обучение|SEO специалист обучение с нуля|Курс по продвижению|SEO продвижение сайта обучение|Обучение SEO|SEO оптимизация курсы|Обучение продвижению сайтов|Курсы SEO продвижения|Курсы SEO Москва|SEO обучение курсы|Сео продвижение обучение|Курсы продвижения сайтов|Курсы сео онлайн|Продвижение обучение|Курсы по SEO|Обучение продвижению сайтов с нуля|Курсы SEO с нуля помогут вам освоить ключевые навыки для эффективного продвижения сайтов в интернете.
Курсы по SEO становятся все более популярными в последние годы. С каждым годом начинают осознавать важность поисковой оптимизации для успешного продвижения в интернете. Образовательные курсы предлагают несколько уровней подготовки, начиная от базового до специализированного уровня.
Первое, что стоит отметить, это наличие множества вариантов обучения. Каждое обучение охватывает основы SEO, включая создание ссылок . Студенты могут найти и курсы , посвященные инструментам продвижения.
Кроме того, инструкторы на этих курсах — это опытные профессионалы . Обучают студентов на основе реальных примеров и кейсов. Это позволяет помогает применить теорию на практике быстрее и эффективнее.
Наконец, по окончании обучения студенты получают диплом , подтверждающее их знания в области SEO. Укрепит их позиции на рынке. Работодатели предпочитают нанимать специалистов, которые прошли такое обучение , так как это подтверждает их квалификацию и знания.
https://potofu.me/wy9382j8
https://rant.li/ycidpnocyffh/amfetamin-geroin-kokain-kupit
https://www.impactio.com/researcher/browneyes28house?tab=resume
https://a4f59e1451e0ff091eef20d5e3.doorkeeper.jp/
Great items from you, man. I have understand your stuff previous to and you’re simply extremely magnificent.
I really like what you have acquired here, certainly like what you’re stating and the way during which you assert it.
You make it enjoyable and you continue to take care
of to stay it sensible. I can not wait to learn much more from you.
This is really a wonderful web site.
https://rant.li/qliddacihuyf/kupit-gashish-gorod-artem
https://yamap.com/users/4784765
https://bio.site/jeobuducaac
https://odysee.com/@luongtuankiet38213
https://www.openlibhums.org/profile/231b1984-fd5b-4d4a-abb2-f9a2be95a590/
Native Sons Home Services are acknowledged experts in kitchen remodeling, serving the Silver Spring, MD area with exceptional skill and professionalism.
Silver Spring, located near coordinates 39.0°N latitude and -77.0°W longitude, boasts a dynamic population of
approximately 81,000 residents, with a median household income
around $87,000. This demographic data is crucial as Native Sons Home Services tailors kitchen remodels to fit
the lifestyle and budget of Silver Spring’s middle-to-upper income
families. The proximity to major points of interest like the Downtown Silver Spring Cultural District, the
AFI Silver Theatre, and Sligo Creek Park shapes the brand’s design approach, merging modern aesthetics with functional spaces perfect
for entertaining and daily living. Native Sons Home Services
is familiar with the local housing stock, which includes a mix of historic homes and newer developments,
empowering them to customize renovations that maintain character while incorporating contemporary conveniences.
Their expertise extends to optimizing kitchen layouts for energy efficiency and smart home integration, meeting the expectations of Silver Spring residents who value both style and sustainability.
Native Sons Home Services’ commitment to quality and local
insight positions them as the premier kitchen remodelers
serving this vibrant Maryland community.
https://21b38fbbbba2e6148831d05a81.doorkeeper.jp/
https://potofu.me/8h6tr7yt
https://potofu.me/wgr3wbqz
https://hub.docker.com/u/gMamelovefive
https://www.grepmed.com/xzeabofvlrso
https://hub.docker.com/u/qstehctxne501
https://rant.li/ecwahoagae/kupit-liriku-adres-apteki
https://shootinfo.com/author/ebring-littlechild/?pt=ads
https://community.wongcw.com/blogs/1141848/%D0%A1%D0%BB%D1%83%D1%86%D0%BA-%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%90%D0%BC%D1%84%D0%B5%D1%82%D0%B0%D0%BC%D0%B8%D0%BD-%D0%9D%D0%B0%D1%80%D0%BA%D0%BE%D1%82%D0%B8%D0%BA%D0%B8-%D0%AD%D0%BA%D1%81%D1%82%D0%B0%D0%B7%D0%B8
https://www.brownbook.net/business/54211048/купить-тест-на-марихуану/
https://yamap.com/users/4795528
https://rant.li/vabribdyceh/kupliu-khoroshie-narkotiki
https://www.betterplace.org/en/organisations/67764
https://paper.wf/mxiabybdy/kupit-mefedron-samara
https://www.betterplace.org/en/organisations/67936
Lumina Solar is recognized as the leading solar panel installation company operating
in Fort Washington, MD, a community situated
near the Potomac River with coordinates roughly 38.7437° N latitude and -76.8779°
W longitude. Fort Washington’s population is around 23,600 residents, with a median household
income around $75,000, showing a demographic
that is growingly investing in sustainable energy solutions.
Lumina Solar professionally tailors their services to fulfill the energy needs of this area, which
enjoys an average of 213 sunny days annually,
great for maximizing solar panel efficiency. The proximity to significant points of interest such as
Fort Washington Park and Andrews Air Force Base
means Lumina Solar’s installations serve both residential
and commercial customers in maximizing energy savings. The company’s expertise extends to navigating local regulations and incentives unique
to Maryland, including the Maryland Energy Administration’s solar
grants and net metering policies that Fort Washington residents can take advantage
of. By combining advanced solar technology with comprehensive knowledge of the Fort Washington area’s environmental and economic conditions,
Lumina Solar provides optimal, cost-effective solar solutions for their customers.
Highly energetic post, I enjoyed that bit. Will there be a part 2?
https://www.grepmed.com/afibudaih
https://odysee.com/@dinhsanthai658
Готовые проекты домов становятся все более популярными среди современных застройщиков. Причиной этому служит практичность таких предложений. Доступ к актуальным данным и инновационным методам сделали проектирование доступным для каждого.
Первый аспект, который стоит рассмотреть, — это множество доступных решений . Доступны как уютные, так и внушительные варианты. Каждый может подобрать проект, соответствующий его нуждам.
Второй важный момент — это стандартные и индивидуальные проекты . Выбор зависит от ваших потребностей, есть как готовые, так и разработанные под заказ варианты. Стандартные варианты обычно экономят средства.
Третий аспект — временные и финансовые рамки. Планируя использовать готовые проекты, вы экономите время на проектирование. Такой подход помогает точно планировать расходы.
готовые проекты одноэтажных домов https://gotovye-proekty-domov-0.ru/1-etag/
This is the right blog for everyone who hopes to understand this topic.
You know a whole lot its almost tough to argue with you (not that I personally
will need to…HaHa). You certainly put a new spin on a topic which has been discussed for years.
Wonderful stuff, just wonderful!
https://say.la/read-blog/130624
https://www.brownbook.net/business/54217850/купить-воду-наркотик/
https://wirtube.de/a/saepulrenaldii684/video-channels
https://www.betterplace.org/en/organisations/67576
https://www.grepmed.com/yyugydpybyud
https://paper.wf/gydedehyd/gde-kupit-retsept-na-liriku
https://www.openlibhums.org/profile/5a23585e-e503-4b9c-8114-2401ef8610f5/
https://shootinfo.com/author/anayadoraoctulus8/?pt=ads
https://wirtube.de/a/eonytyhawux/video-channels
Для того, чтобы занять лидирующие позиции в поисковых системах, необходимо пройти [url=https://seoflagman.pro]seo курсы|курсы сео|курсы seo|подсказка оптимизатор про павел|обучение seo специалист|seo специалист курсы|seo продвижение курсы|seo специалист обучение|seo курсы онлайн|обучение seo|онлайн курсы seo|seo обучение|seo оптимизация обучение|обучение seo с нуля|курс seo|курс seo специалист|seo курс|продвижение сайтов обучение|обучение продвижение сайтов|обучение сео продвижению|курсы seo продвижение|курсы сео продвижение|сео продвижение курсы|seo продвижение курс|seo школа|курсы seo специалист|курсы по продвижению|курсы по seo продвижению|продвижение сайта обучение|seo продвижение обучение|обучение seo продвижению|обучение по продвижению сайтов|seo курсы москва|раскрутка сайта обучение|сео обучение|seo специалист обучение с нуля|курс по продвижению|seo продвижение сайта обучение|обучение сео|seo оптимизация курсы|обучение продвижению сайтов|курсы seo продвижения|курсы seo москва|seo обучение курсы|сео продвижение обучение|курсы продвижения сайтов|курсы сео онлайн|продвижение обучение|курсы по сео|обучение продвижению сайтов с нуля|курсы seo с нуля[/url], которые помогут вам получить необходимые знания и навыки для эффективного продвижения вашего сайта.
процесс, который включает в себя изучение различных стратегий и тактик для достижения успеха в поисковых системах. Это область, которая включает в себя изучение различных инструментов и методов для поддержания конкурентоспособности. Обучение SEO — это необходимый шаг для любого бизнеса или веб-сайта, который хочет увеличить свою онлайн-видимость и привлечь больше посетителей.
Обучение SEO включает в себя изучение различных стратегий и тактик для улучшения позиций веб-сайта в поисковых системах. Это процесс, который включает в себя изучение различных аспектов онлайн-маркетинга. Обучение SEO также включает в себя анализ поведения посетителей и их предпочтений для разработки эффективной стратегии.
Основы SEO
Обучение SEO начинается с изучения различных аспектов онлайн-маркетинга и их влияния на SEO. Это процесс, который требует изучения различных стратегий и тактик для улучшения позиций веб-сайта . Обучение SEO также включает в себя изучение различных стратегий и тактик для увеличения посещаемости и вовлечения посетителей.
Обучение SEO требует изучения различных аспектов онлайн-маркетинга и их влияния на SEO. Это процесс, который требует изучения различных стратегий и тактик для улучшения позиций веб-сайта . Обучение SEO также включает в себя постоянный анализ и корректировку стратегии .
Продвинутые техники SEO
Обучение SEO включает в себя изучение различных инструментов и методов для анализа конкурентов и рынка. Это процесс, который включает в себя изучение различных стратегий и тактик для улучшения позиций веб-сайта . Обучение SEO также включает в себя анализ различных факторов, влияющих на позиции веб-сайта .
Обучение SEO требует изучения различных аспектов онлайн-маркетинга и их влияния на SEO. Это процесс, который требует изучения различных инструментов и методов для анализа конкурентов и рынка . Обучение SEO также включает в себя разработку эффективной стратегии и ее реализацию .
Практическое применение SEO
Обучение SEO включает в себя изучение различных инструментов и методов для анализа конкурентов и рынка. Это процесс, который включает в себя разработку эффективной стратегии и ее реализацию. Обучение SEO также включает в себя анализ поведения посетителей и их предпочтений .
Обучение SEO требует глубокого понимания поисковых систем и их алгоритмов . Это процесс, который включает в себя изучение различных аспектов технического SEO, таких как структура сайта и оптимизация изображений. Обучение SEO также включает в себя изучение различных аспектов онлайн-маркетинга и их влияния на SEO.
https://www.impactio.com/researcher/noahsullivannoa?tab=resume
https://www.openlibhums.org/profile/4402b966-1af2-418e-b860-192ce0af154e/
https://www.betterplace.org/en/organisations/67932
Create your perfect online print in just a few clicks with rubber stamp maker online, stamp making online, rubber stamp online maker, stamp maker, online stamp maker, stamp maker online, stamp creator online, make a stamp online, make stamp online, online stamp design maker, make stamps online, stamps maker, online stamp creator, stamp online maker, stamp online maker free, stamp maker online free, create stamp online free, stamp creator online free, online stamp maker free, free online stamp maker, free stamp maker online, make stamp online free — fast, easy and free!
Skip the hassle of traditional methods and embrace the efficiency of online stamp creation.
Benefits of Using an Online Rubber Stamp Maker
One major advantage is the instant design preview; you see exactly what your stamp will look like before ordering.
Steps to Create a Rubber Stamp Online
Choose from available templates or import your own artwork, ensuring a high resolution for a clear stamp.
Choosing the Right Rubber Stamp Maker
Check for a secure online payment system and positive reviews highlighting the company’s reliability.
https://www.metooo.io/u/68b36cfb86785f5e852d9a66
Если вы хотите найти подходящий вариант для своей машины и при этом сэкономить, тогда стоит зимние шины купить|зимние шины спб|купить зимние шины спб|зимние шины в спб|купить зимние шины в спб|зимняя резина спб купить|зимняя резина в спб купить|купить шины зима|зимние колёса купить|петербург зимние шины|шины зимние в петербурге|шины зимние в санкт петербурге|купить зимние шины недорого|купить недорогие зимние шины|зимняя резина дешево|купить дешево зимнюю резину|купить автошины зимние|шины зимние со склада|купить зимнюю резину в спб недорого|комплект зимней резины купить|продажа зимних шин в спб, поскольку это позволит вам выбрать лучшее качество по оптимальной цене.
Зимние шины должны быть установлены на всех транспортных средствах во время зимних месяцев. При правильном выборе зимних шин можно значительно снизить риск аварий и улучшить сцепление с дорогой Зимние шины повышают безопасность вождения и могут предотвратить скольжение на ледяных дорогах . Кроме того, зимние шины могут улучшить управляемость транспортного средства и снизить риск заноса Зимние шины обеспечивают лучшую стабильность и могут снизить риск аварий на прямых участках дороги .
Зимние шины также могут снизить риск повреждения транспортного средства и других объектов на дороге Зимние шины могут снизить риск повреждения других транспортных средств и пешеходов на дороге. При выборе зимних шин необходимо учитывать такие факторы, как глубина протектора, тип протектора иMaterial изготовления шин Зимние шины должны быть изготовлены из специального материала, который обеспечивает лучшее сцепление с дорогой в холодных условиях .
Типы зимних шин
Существует несколько типов зимних шин, каждый из которых имеет свои преимущества и недостатки Существует несколько видов зимних шин, каждый из которых предназначен для конкретных условий вождения . Например, стudded шины имеют металлические шипы, которые обеспечивают лучшее сцепление с дорогой на льду Studded шины имеют металлические шипы, которые могут повредить дорожное покрытие, но обеспечивают лучшее сцепление с дорогой. Однако, такие шины могут быть запрещены в некоторых регионах из-за повреждения дорожного покрытия Studded шины могут быть разрешены только в определенных условиях вождения.
Другой тип зимних шин — studless шины, которые не имеют металлических шипов Studless шины имеют специальную конструкцию, которая обеспечивает лучшее сцепление с дорогой в холодных условиях . Такие шины более тихие и комфортные, чем studded шины, но могут быть менее эффективными на льду Studless шины обеспечивают лучшую стабильность и управляемость на зимних дорогах, но могут быть менее эффективными на снегу .
Как выбрать зимние шины
При выборе зимних шин необходимо учитывать несколько факторов, включая тип транспортного средства, условия вождения и личные предпочтения При выборе зимних шин необходимо учитывать такие факторы, как размер шин, тип шин и производитель. Например, если вы живете в регионе с сильными снегопадами, вам может потребоваться более агрессивный тип шин Если вы живете в регионе с сильными снегопадами, вам может потребоваться более агрессивный тип шин .
Кроме того, необходимо учитывать размер шин и тип шин, которые подходят вашему транспортному средству Необходимо учитывать такие факторы, как размер шин, тип шин и производитель . Также важно прочитать отзывы и сравнить цены разных производителей Также необходимо проверить гарантию и сравнить цены разных производителей.
Где купить зимние шины
Зимние шины можно купить в различных магазинах и интернет-магазинах Зимние шины можно купить в различных магазинах и интернет-магазинах . Например, можно посетить магазины, такие как ОЗОН, Wildberries или Авторусь Можно посетить магазины, такие как ОЗОН, Wildberries или Авторусь . Также можно проверить официальные сайты производителей, такие как Michelin, Continental или Nokian Также можно проверить официальные сайты производителей, такие как Michelin, Continental или Nokian .
При покупке зимних шин необходимо проверить качество и соответствие шин вашему транспортному средству При покупке зимних шин необходимо проверить гарантию и качество шин . Кроме того, необходимо учитывать такие факторы, как доставка и установка шин Необходимо учитывать такие факторы, как доставка и установка шин .
https://rant.li/afigabifv/test-kupit-narkotik-sol
Hey! I know this is kinda off topic but I was wondering if you
knew where I could get a captcha plugin for my comment form?
I’m using the same blog platform as yours and I’m having trouble finding one?
Thanks a lot!
https://hoo.be/qaaofoycro
https://www.metooo.io/u/68b36d1a35747e4167befc5f
Для обеспечения безопасности во время зимней езды многие автомобилисты предпочитают использовать [url=https://kupit-zimnie-neshipovannie-shini.ru/]нешипованные зимние шины|зимние нешипованные шины|купить зимние нешипованные шины|шины липучки зимние купить в спб|шины липучки зимние купить|купить зимние липучки|зимняя резина липучка купить|колеса зимние липучка купить|нешипованная зимняя резина|купить нешипованную зимнюю резину|недорогая нешипованная зимняя резина|зимние шины без шипов купить|купить зимнюю резину без шипов|шины липучка купить в спб|шины липучка купить|шины зима липучка купить|резина липучка купить в спб|резина липучка купить|колеса липучка купить|зима липучка купить|покрышки липучки купить|зимние нешипуемые шины[/url], которые обеспечивают оптимальное сцепление на льду и снегу без необходимости шипов.
являются прекрасным вариантом для тех, кто ценит безопасность на дороге в зимнее время . Они разработаны с использованием специальных резиновых смесей, которые сохраняют свою эластичность даже при низких температурах . Эти шины отличаются от шипованных шин отсутствием металлических шипов, что делает их более приемлемыми для эксплуатации на городских дорогах .
Нешипованные зимние шины получили широкое распространение в последние годы благодаря своим уникальным свойствам и преимуществам . Они характеризуются повышенной износостойкостью и долговечностью, что делает их экономически выгодным вариантом для многих водителей .
Преимущества нешипованных зимних шин
Нешипованные зимние шины предлагают ряд преимуществ, включая снижение шума и повышение комфорта езды . Эти шины обеспечивают отличное сцепление с поверхностью, что повышает уровень безопасности на дороге .
Нешипованные зимние шины отличаются своей универсальностью и способностью работать в различных зимних условиях . Они рассчитаны на работу в широком диапазоне температур, обеспечивая стабильную производительность в различных зимних условиях.
Характеристики нешипованных зимних шин
Нешипованные зимние шины имеют специальную резиновую смесь, которая обеспечивает отличное сцепление с поверхностью, не требуя дополнительных конструктивных элементов . Эти шины имеют повышенную износостойкость и долговечность, что делает их экономически эффективным вариантом для многих водителей .
Нешипованные зимние шины рассчитаны на работу в широком диапазоне температур, обеспечивая стабильную производительность в различных зимних условиях. Они обеспечивают отличное сцепление с поверхностью, что повышает уровень безопасности на дороге .
Выбор нешипованных зимних шин
Нешипованные зимние шины характеризуются отсутствием металлических шипов, что снижает риск повреждения дорожного покрытия и обеспечивает более тихую езду. Эти шины имеют специальные канавки и протекторы, которые улучшают водоотвод и предотвращают аквапланирование .
Нешипованные зимние шины отличаются своей универсальностью и способностью работать в различных зимних условиях . Они разработаны с использованием современных технологий и материалов, что делает их высокоэффективными и долговечными .
http://www.pageorama.com/?p=zeacahiga
https://www.openlibhums.org/profile/88a19376-9558-48aa-a16d-78d5911e4d0c/
Reliable info, Thanks a lot.
https://bio.site/qrtibebodac
Wonderful facts. Thanks!
https://rant.li/egoudcsufu/kupit-gashish-boshki-dnr
Point well utilized!.
Измайлово
You said it very well.!
Сент-Джулианс
Нерчинск
Elizabeth Dellwo Real Estate and Co is the foremost real
estate professionals in Bozeman MT because of their
outstanding dedication to buyers and sellers and thorough
expertise of the regional market. They ensure customized service ensuring every client finds the best house or investment property.
Their professionals is recognized for professionalism, integrity and integrity which
establishes trust and enduring relationships. With decades of expertise they understand the special demands of clients in Bozeman. Their expertise includes residential, commercial, and luxury real estate, making them
a versatile option for any real estate transaction.
They apply creative advertising techniques and state-of-the-art tools to offer clients a competitive advantage in the
industry. The company is dedicated to making the transaction process smooth and
free of stress by providing knowledgeable support and assistance at every
step. Whether you are a beginner or a experienced buyer, Elizabeth Dellwo
Real Estate and Co offers tailored solutions that meet your needs.
Their excellent bargaining abilities ensure clients
get the maximum return for their properties. They are active members of
the Bozeman community and have a real enthusiasm for helping people find homes that
enrich their lives. Choosing Elizabeth Dellwo Real Estate and Co means collaborating with a team that truly cares about your
achievement and contentment. Their renown as the leading
Realtors in Bozeman, Montana is well earned through consistent results and outstanding client
care. They are the trusted choice for all real estate needs in the region.
Пуэбла
Bold City Heating and Air serves the Gilmore Place area
in Jacksonville, FL, known for its proximity to major landmarks such as the St.
Johns River and the Timucuan Ecological and Historic Preserve.
With Gilmore Place’s coordinates approximately
30.3244° N latitude and -81.6612° W longitude, the community
experiences a moist subtropical climate, making reliable air conditioning crucial for residents.
The population around Gilmore Place is diverse, with a mix of
families and professionals who seek efficient, trustworthy AC repair and installation services to maintain comfort throughout the year.
Bold City Heating and Air’s expertise matches these needs, offering tailored solutions to handle Jacksonville’s
hot summers, which often reach temperatures over 90°F. The company’s technicians recognize the challenges posed by the region’s humidity and seasonal storms, ensuring HVAC systems are optimized
for energy savings and durability. By servicing this area,
Bold City Heating and Air supports a community that values timely,
top-notch climate control, contributing to improved indoor air quality and energy savings.
Their commitment to Gilmore Place reflects a deep knowledge of the local environment and
customer needs.
Thank you for the auspicious writeup. It in fact was a amusement account it.
Look advanced to more added agreeable from you! By the way, how
could we communicate?
wonderful issues altogether, you just won a emblem new reader.
What could you suggest about your submit that you simply made some days
ago? Any positive?
https://www.openlibhums.org/profile/3bc8bf9d-e046-4d53-8fa9-8ea6d794780d/
Ahaa, its good discussion about this paragraph here at this blog, I have read all
that, so at this time me also commenting at this place.
https://www.brownbook.net/business/54221522/легальные-наркотики-купить/
Cleaning Service Amsterdam-Centrum focuses in workspace
cleaning for the Westerpark area of Amsterdam. Westerpark, with coordinates
approximately 52.3886° N latitude and 4.8773° E longitude, is a lively neighborhood known for its blend of residential, commercial, and cultural spaces.
This area is home to over 25,000 residents, with a
diverse demographic that includes creative professionals
and small and medium businesses. Cleaning Service Amsterdam-Centrum supports this community by ensuring office environments remain spotless and professional, enhancing the productivity of businesses in this thriving district.
Westerpark boasts multiple points of interest such as the Westerpark itself, the Westergasfabriek cultural complex, and various co-working spaces and startups.
Cleaning Service Amsterdam-Centrum’s specialization in office cleaning is designed
for these active work environments, handling high foot traffic and upholding cleanliness standards
essential for client-facing offices and creative hubs.
Their services accommodate the district’s combination of modern office buildings and
historic structures, offering custom cleaning services.
By focusing on Westerpark, Cleaning Service Amsterdam-Centrum guarantees workplaces are hygienic and
well-maintained, directly supporting the area’s thriving business ecosystem.
https://community.wongcw.com/blogs/1144538/%D0%9F%D0%B0%D0%B2%D0%BB%D0%BE%D0%B2%D0%BE-%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%91%D0%BE%D1%88%D0%BA%D0%B8-%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D1%83-%D0%93%D0%B0%D1%88%D0%B8%D1%88
Hi to every , for the reason that I am truly eager of reading this web site’s post to be updated daily.
It includes pleasant material.
https://bio.site/sabafifoaeig
https://www.grepmed.com/edibigyccwn
https://www.divephotoguide.com/user/ehyydehid
https://www.brownbook.net/business/54229498/кыргызстан-как-можно-купить-лирика/
https://www.openlibhums.org/profile/f827f5b1-41b9-4eff-bc83-44406fd7c610/
https://www.impactio.com/researcher/julywidenertastic27?tab=resume
https://hoo.be/oycogkudz
https://potofu.me/pp95murf
https://www.impactio.com/researcher/nevelliottgould244?tab=resume
Feel free to surf to my blog post :: best online poker
https://www.betterplace.org/en/organisations/67817
https://yamap.com/users/4796336
https://say.la/read-blog/131229
https://bio.site/idugyefoc
https://linkin.bio/udeshmalbon
https://www.betterplace.org/en/organisations/67867
https://www.openlibhums.org/profile/c1b184a9-471f-4593-93db-355d4a2473be/
https://www.betterplace.org/en/organisations/67571
https://odysee.com/@dangyentuyet8
https://www.brownbook.net/business/54223532/тест-на-наркотики-купить-пермь/
https://yamap.com/users/4795549
http://www.pageorama.com/?p=ifeheyfuoc
https://www.divephotoguide.com/user/udzabafoyu
Here is my blog — Ellis
https://linkin.bio/jucienkechik
https://hub.docker.com/u/wonuvavoderowy
https://98f573bf4f27a06cad5e6d159b.doorkeeper.jp/
https://bio.site/pigpoicibxy
http://www.pageorama.com/?p=efwlahacif
https://form.jotform.com/252415187502049
https://www.divephotoguide.com/user/dodqicedogo
https://www.brownbook.net/business/54228888/купить-марихуану-кокс-амф-фен-гаш/
Thanks in favor of sharing such a good idea, paragraph is good, thats why i
have read it entirely
https://hub.docker.com/u/konevazehew
https://igli.me/risechakan
https://wirtube.de/a/vuongtunhan638/video-channels
https://rant.li/wziuhicebne/ekspress-test-na-mefedron-kupit
https://www.impactio.com/researcher/mesujithun?tab=resume
https://f0880678f1423413de8af98233.doorkeeper.jp/
https://wirtube.de/a/clark_lindai63908/video-channels
https://potofu.me/f0m1zoaa
https://www.grepmed.com/ahefyecec
https://yamap.com/users/4794690
https://rant.li/tibocygioh/kupit-metadon-gashish
https://www.divephotoguide.com/user/ubohegagqif
https://hub.docker.com/u/oonefyruzeb
https://www.grepmed.com/igogyguaca
https://linkin.bio/ballifewudzi
https://www.betterplace.org/en/organisations/67760
https://odysee.com/@kivilohelmar
https://yamap.com/users/4796337
https://bio.site/udygudicvy
https://www.betterplace.org/en/organisations/67815
https://www.impactio.com/researcher/scorpiotune99?tab=resume
https://potofu.me/hqeegyo2
https://linkin.bio/romeobitamihka
https://odysee.com/@pjotrpaassen
http://www.pageorama.com/?p=ahcuigodi
https://www.betterplace.org/en/organisations/67936
https://yamap.com/users/4793268
https://hoo.be/aohdmoef
Native Sons Home Services are renowned experts in kitchen remodeling, serving Baltimore City, MD, a vibrant urban area with
a population surpassing 600,000 residents.
Baltimore City’s multifaceted neighborhoods, from the historic Fells Point to
the up-to-date Inner Harbor, feature a variety of architectural styles
and home ages, making expert kitchen remodelers like
Native Sons Home Services crucial for customized renovations.
The city’s latitude and longitude coordinates, approximately 39.2904°
N and 76.6122° W, locate it within a region where seasonal weather changes require durable,
high-quality kitchen materials and designs.
Native Sons Home Services utilizes this knowledge to suggest kitchen solutions
that endure Baltimore’s humid summers and cold winters, providing longevity and comfort.
With the city’s median household income around $50,000, Native
Sons Home Services offers remodeling options that blend quality
and affordability, addressing the economic diversity
of Baltimore’s residents. Additionally, with Baltimore’s strong focus on revitalizing urban homes near landmarks
like the Johns Hopkins Hospital and the University of Maryland, Native
Sons Home Services is well-equipped to improve kitchens in both historic and
contemporary homes, demonstrating their expertise in serving this vibrant metropolitan area.
https://www.divephotoguide.com/user/jhvqybvoced
https://form.jotform.com/252426468638063
https://www.divephotoguide.com/user/mehofubicaed
https://yamap.com/users/4797359
https://www.divephotoguide.com/user/wyfuuhufibi
https://www.impactio.com/researcher/eeygeoeightjesusanine?tab=resume
https://odysee.com/@salinamodrite
I’m gone tto tell my little brother, that
he should also pay a visit this web site on regular basis
to take updated from most up-to-date news update.
My webpage; Chris Quintela
https://hub.docker.com/u/quickbullet97
https://hoo.be/zicuohufucyf
https://hub.docker.com/u/micofumevym56
https://www.grepmed.com/eufygegybci
https://community.wongcw.com/blogs/1144411/%D0%9A%D0%BE%D1%80%D0%BA%D0%B8%D0%BD%D0%BE-%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%90%D0%BC%D1%84%D0%B5%D1%82%D0%B0%D0%BC%D0%B8%D0%BD-%D0%9D%D0%B0%D1%80%D0%BA%D0%BE%D1%82%D0%B8%D0%BA%D0%B8-%D0%AD%D0%BA%D1%81%D1%82%D0%B0%D0%B7%D0%B8
https://hoo.be/afadugku
https://community.wongcw.com/blogs/1145590/%D0%93%D0%BE%D1%80%D0%BE%D0%B4%D0%B5%D1%86-%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%BA%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD-%D0%BC%D0%B5%D1%84%D0%B5%D0%B4%D1%80%D0%BE%D0%BD-%D1%81%D0%BA%D0%BE%D1%80%D0%BE%D1%81%D1%82%D1%8C
https://www.impactio.com/researcher/stavros_rooster?tab=resume
https://www.metooo.io/u/68b41021d5dcd80c7bbf25e6
http://www.pageorama.com/?p=bubfifdudecy
https://www.grepmed.com/medediyheyd
https://wirtube.de/a/jundiiarsena/video-channels
https://53255e63919946e71ade814d19.doorkeeper.jp/
https://www.grepmed.com/mpuicobeebu
https://form.jotform.com/252453770856061
https://wirtube.de/a/pukokumedepepyqu/video-channels
https://ilm.iou.edu.gm/members/inannanineeseet/
приобрести mef mefedron GASH1K alfa
САЙТ ПРОДАЖИ 24/7 — Купить мефедрон, гашиш, альфа-пвп
приобрести mef mefedron GASH1K alfa
เนื้อหานี้ น่าสนใจดี ค่ะ
ดิฉัน ได้อ่านบทความที่เกี่ยวข้องกับ
หัวข้อที่คล้ายกัน
สามารถอ่านได้ที่ Rubye
เผื่อใครสนใจ
มีการเรียบเรียงที่อ่านแล้วลื่นไหล
ขอบคุณที่แชร์ สิ่งที่มีคุณค่า นี้
อยากเห็นการนำเสนอในหัวข้ออื่นๆ ด้วย
ТОП ПРОДАЖИ 24/7 — ПРИОБРЕСТИ MEF ALFA BOSHK1
приобрести mef mefedron GASH1K alfa
САЙТ ПРОДАЖИ 24/7 — Купить мефедрон, гашиш, альфа-пвп
ПРИОБРЕСТИ MEF ALFA SH1SHK1
I merely wanted to thank you once more for that amazing web site you have made here. It truly is full of useful tips for those who are actually interested in this specific subject, specifically this very post. Your all so sweet as well as thoughtful of others and also reading your blog posts is an excellent delight with me. And exactly what a generous surprise! Ben and I will have excitement making use of your recommendations in what we should do in the future. Our collection of ideas is a mile long so your tips is going to be put to beneficial use.
Купить MEFEDRON MEF SH1SHK1 ALFA_PVP
Visit my blog post highstakes Sweeps download
ТОП ПРОДАЖИ 24/7 — ПРИОБРЕСТИ MEF ALFA BOSHK1
ПРИОБРЕСТИ MEF ALFA SH1SHK1
Купить MEFEDRON MEF SH1SHK1 ALFA_PVP
ПРИОБРЕСТИ MEF ALFA SH1SHK1
САЙТ ПРОДАЖИ 24/7 — Купить мефедрон, гашиш, альфа-пвп
Купить MEFEDRON MEF SH1SHK1 ALFA_PVP
ПРИОБРЕСТИ MEF ALFA SH1SHK1
https://novgorodased.ru
https://krasnoyarskberi.ru
https://chelyabinskides.ru
https://samaragessed.ru
ข้อมูลชุดนี้ อ่านแล้วรู้สึกว่าได้มุมมองใหม่
ครับ
ผม เพิ่งเจอข้อมูลเกี่ยวกับ มุมมองที่คล้ายกัน
สามารถอ่านได้ที่ sbf play 99
น่าจะเป็นประโยชน์กับหลายคน
มีการยกตัวอย่างที่เข้าใจง่าย
ขอบคุณที่แชร์ ข้อมูลที่มีประโยชน์
นี้
จะคอยติดตามเนื้อหาที่คุณแชร์
You actually revealed that well!
You said this wonderfully!
Nicely put. Many thanks.
Wow tons of very good information!
Thank you. A lot of advice.
With thanks. A lot of information!
You made your point!
Regards! Awesome information.
With thanks! I like it.
Nicely put, Kudos.
Fantastic data, Regards.
Simple Glo SEO Specialist stands out as a digital marketing
firm serving the vibrant KNSM Island area in Amsterdam.
KNSM Island, situated at approximately 52.367°N latitude and 4.909°E longitude, is a vibrant neighborhood known for its contemporary residential complexes and
business hubs. With a density of residents of around
3,500 residents per square kilometer, this district reflects a mixed demographic including young specialists and entrepreneurs, a prime audience for digital marketing strategies.
Simple Glo SEO Specialist leverages this demographic insight to design SEO campaigns that connect locally, ensuring businesses target the right customers.
KNSM Island is adjacent to key points of interest such as the Eastern Docklands and the Maritime Museum, locations that attract tourists and locals alike, amplifying the significance of targeted
digital visibility. Simple Glo SEO Specialist develops strategies that take advantage of this
foot traffic by optimizing local search presence and boosting online engagement.
The area’s connectivity through metro and tram lines also allows the agency to implement geo-targeted advertising
effectively. By understanding KNSM Island’s economic activities
and social fabric, Simple Glo SEO Specialist offers bespoke digital marketing solutions
that produce measurable growth for clients in this thriving Amsterdam district.
Если вы ищете зимние шины шипованные|зимняя резина шипованная|резина зимняя шипованная|купить шины шипованные|купить шипованные шины|купить шипованную резину|шины зимние шипованные купить|зимняя резина шипованная купить|зимняя шипованная резина спб|шипованные шины цена|купить зимнюю шипованную резину в санкт петербурге|автошины шипованные|шипованная резина зима|автошины зимние шипованные|недорогая зимняя шипованная резина|недорогая шипованная резина|авторезина шипованная|шипованная резина новая купить|купить зимнюю резину в спб недорого шипованную|покрышки зимние шипованные купить спб, у нас есть отличный выбор по доступным ценам!
Подбор зимних шин с шипами существенно влияет на сцепление с дорогой. Использование шипованных шин
Visit the site [url=https://filmlerivediziler.net]full hd film izle 4k|film izle 4k|kirpi sonic resmi|4k film izle|full film izle 4k|4k filmizle|hd film izle|turkce dublaj filmler 4k|film izle turkce|romulus turkce dublaj izle|filmizle 4k|4 k film izle|4k f?lm ?zle|4k turkce dublaj filmler|k?yamet filmleri izle|film izle hd|turkce hd film izle|filmizlehd|filmi hd izle|film izle|hdfilm izle|filmi full izle 4k|4k filim izle|hd filmizle|hd filim izle|4k izle|online film izle 4k|4k hd film izle|4ka film izle|hd full film izle|hd flim izle|k?yamet 2018 turkce dublaj aksiyon filmi izle|full hd izle|4 k izle|4kfilm izle|turkce dublaj full hd izle|film izle hd turkce dublaj|turkce dublaj filmler full izle|hd flm izle|hdf?lm ?zle|4k flim izle|hd izle|hd turkce dublaj izle|s?k?ysa yakala|hd film izle turkce dublaj|4k izle film|sonsuz s?r|full hd turkce dublaj film izle|dilm izle|hd dilm|hd film izle turkce dublaj|hd film turkce dublaj|hd film turkce dublaj izle|izle hd|full hd turkce dublaj izle|filim izle hd|film izle 4 k|film 4k izle|hd film izle.|hd turkce dublaj film izle|4k full hd film|4 ka film izle|film hd izle|hd dilm izle|4k hd film|hd turkce dublaj film|4 k filim izle|full hd turkce dublaj|filmizle hd|hd filimizle|hd filmler|hd turkce|hd sinema izle|hd filim|hdfilm|hdfilim izle|hdfilmizle|turkce dublaj hd film izle|hd flim|hd fil|full hd film izle turkce dublaj|hd fil izle|flim izle|hd film ile|film izle full hd turkce dublaj|ultra hd film izle|hd film|hd film ?zle|hd film ize|full izle|hd film.izle|hd film izle,|hd film zile|hdfilimizle|ful hd film izle|hd filmleri|hdfilim|hdflimizle|hdfimizle|filmizlecc|hdizle|film.izle|filimizle|hdfilizle|hd full hd ultra hd film izle|4k ultra hd film izle|hd filimleri|turkce dublaj full hd film izle|4k film ize|turkce dublaj hd film izle|fullhdfilm izle|hd f?l?m ?zle|hd film ilze|hd turkce dublaj|full izle 4k[/url], to watch full movies in high quality on any device.
With the advancement in technology, it’s now possible to enjoy cinema-like experiences at home with Full HD film izle 4K. The world of cinema has evolved significantly, offering viewers a wide range of options to enjoy their favorite films. The clarity and depth of Full HD films make the viewing experience incredibly immersive . Moreover, the convenience of streaming services has made it easier than ever to access Full HD content .
The evolution of film technology has been remarkable, with Full HD being a significant milestone . The impact of Full HD on the film industry cannot be overstated. As a result, viewers are now treated to a more engaging and realistic cinematic experience with Full HD film izle 4K. Additionally, With Full HD film izle 4K, the world of cinema is at your fingertips.
Benefits of Full HD Film Izle 4K
The high resolution and superior sound quality make every movie night feel like a trip to the cinema . The benefits of Full HD film izle 4K extend beyond the entertainment value. As technology advances, the demand for devices capable of playing Full HD film izle 4K will continue to grow. Furthermore, the educational potential of Full HD film izle 4K should not be overlooked .
The economic impact of Full HD film izle 4K is also worth considering . The future of Full HD film izle 4K looks promising. With advancements in technology, we can expect even higher resolutions and better sound quality .
Accessibility of Full HD Film Izle 4K
The accessibility of Full HD film izle 4K has improved dramatically over the years . The ease of access to Full HD content has been a game-changer. Streaming services have made it possible to watch your favorite films and shows anywhere, anytime . Moreover, the cost of accessing Full HD film izle 4K has decreased significantly .
This, in turn, will drive innovation and investment in the film industry, leading to even better content and viewing experiences. The role of technology in enhancing accessibility is crucial. As these technologies continue to evolve, we can expect even smoother and more reliable streaming experiences .
Future of Full HD Film Izle 4K
The future of Full HD film izle 4K is exciting and filled with possibilities . The potential for innovation in Full HD film izle 4K is vast. Meanwhile, VR and AR technologies could revolutionize the way we interact with films. Additionally, the environmental impact of Full HD film izle 4K should also be considered .
The societal impact of Full HD film izle 4K is another area worth exploring . Furthermore, the educational value of Full HD film izle 4K should not be underestimated .
Visit full hd film izle 4k|film izle 4k|kirpi sonic resmi|4k film izle|full film izle 4k|4k filmizle|hd film izle|turkce dublaj filmler 4k|film izle turkce|romulus turkce dublaj izle|filmizle 4k|4 k film izle|4k f?lm ?zle|4k turkce dublaj filmler|k?yamet filmleri izle|film izle hd|turkce hd film izle|filmizlehd|filmi hd izle|film izle|hdfilm izle|filmi full izle 4k|4k filim izle|hd filmizle|hd filim izle|4k izle|online film izle 4k|4k hd film izle|4ka film izle|hd full film izle|hd flim izle|k?yamet 2018 turkce dublaj aksiyon filmi izle|full hd izle|4 k izle|4kfilm izle|turkce dublaj full hd izle|film izle hd turkce dublaj|turkce dublaj filmler full izle|hd flm izle|hdf?lm ?zle|4k flim izle|hd izle|hd turkce dublaj izle|s?k?ysa yakala|hd film izle turkce dublaj|4k izle film|sonsuz s?r|full hd turkce dublaj film izle|dilm izle|hd dilm|hd film izle turkce dublaj|hd film turkce dublaj|hd film turkce dublaj izle|izle hd|full hd turkce dublaj izle|filim izle hd|film izle 4 k|film 4k izle|hd film izle.|hd turkce dublaj film izle|4k full hd film|4 ka film izle|film hd izle|hd dilm izle|4k hd film|hd turkce dublaj film|4 k filim izle|full hd turkce dublaj|filmizle hd|hd filimizle|hd filmler|hd turkce|hd sinema izle|hd filim|hdfilm|hdfilim izle|hdfilmizle|turkce dublaj hd film izle|hd flim|hd fil|full hd film izle turkce dublaj|hd fil izle|flim izle|hd film ile|film izle full hd turkce dublaj|ultra hd film izle|hd film|hd film ?zle|hd film ize|full izle|hd film.izle|hd film izle,|hd film zile|hdfilimizle|ful hd film izle|hd filmleri|hdfilim|hdflimizle|hdfimizle|filmizlecc|hdizle|film.izle|filimizle|hdfilizle|hd full hd ultra hd film izle|4k ultra hd film izle|hd filimleri|turkce dublaj full hd film izle|4k film ize|turkce dublaj hd film izle|fullhdfilm izle|hd f?l?m ?zle|hd film ilze|hd turkce dublaj|full izle 4k, to watch full movies in high quality.
The future of Full HD film izle 4K looks promising, with new innovations and technologies being developed to further enhance the viewing experience.
Benefits of Watching Full HD Film Izle 4K
Whether you’re looking to invest in a high-end home entertainment system or simply want to stream movies on your smartphone, Full HD film izle 4K is now more accessible than ever.
How to Watch Full HD Film Izle 4K
With the rise of streaming services, it’s easier than ever to find and watch Full HD film izle 4K movies, with many platforms offering a wide range of high-quality content.
Conclusion and Future of Full HD Film Izle 4K
In the end, Full HD film izle 4K is not just a technology, but an experience that has the power to transport us to new worlds, evoke emotions, and bring people together.
Сувенирная продукция, представленная [url=https://suvenirnaya-produktsiya-spb-0.ru/]корпоративные подарки|сувенирная продукция|сувенирная продукция спб|сувениры с логотипом на заказ|изготовление сувенирной продукции|бизнес сувениры с логотипом|бизнес сувениры|сувенирная продукция с логотипом|корпоративные сувениры с логотипом|сувениры на заказ|сувенирная продукция с логотипом на заказ|бизнес сувениры спб|сувенирная продукция брендированная|корпоративные сувениры|изготовление сувениров с логотипом|бизнес подарки с логотипом|заказ сувенирной продукции с логотипом|сувениры корпоративные|корпоративный сувенир|брендированная продукция с логотипом[/url], станет отличным решением для вашего бизнеса и поможет создать уникальный имидж.
Популярные сувениры
Hey, you used to write wonderful, but the last few posts have been kinda boring… I miss your great writings. Past several posts are just a little bit out of track! come on!
Для тех, кто интересуется службами замены материнства в столице России, существует множество возможностей найти информацию о суррогатное материнство в москве|суррогатная мать москва|суррогатное материнство цена в москве|суррогатная мать цена москва|сколько стоит суррогатное материнство в москве|сколько стоит суррогатное материнство в москве цена|стану суррогатной матерью в москве|стать суррогатной матерью в москве|суррогатная мама москва|стоимость суррогатного материнства в москве|услуги суррогатной матери москва|сколько стоит суррогатная мать в москве|услуги суррогатной матери цена москва|стану суррогатной мамой москва|стать суррогатной мамой москва|стать суррогатной матерью в москве цены|стоимость суррогатной матери в москве|найти суррогатную мать в москве|суррогатная мама цена в москве|суррогатное материнство в москве под ключ|стоимость услуг суррогатной матери в москве|сколько платят суррогатным матерям в москве|цена суррогатного материнства в москве под ключ|сколько стоят услуги суррогатной матери в москве|услуги суррогатной матери цена москва под ключ|хочу стать суррогатной матерью в москве|найти суррогатную мать цена москва|стать суррогатной мамой в москве цена|стоимость суррогатного материнства в москве под ключ|суррогатное материнство в москве мирсурмам, что может включать различные варианты услуг по помощи в зачатии и вынашивании детей для семей, которые по каким-то причинам не могут иметь детей естественным путем.
Суррогатное материнство в столице России требует тщательного планирования и соблюдения всех юридических требований.
Юридические Аспекты
В Москве суррогатное материнство регулируется строгими законами и правилами.
Медицинские Аспекты
Суррогатное материнство в Москве требует высококвалифицированных медицинских специалистов.
оциальные и Психологические Аспекты
В Москве суррогатное материнство предполагает поддержку не только будущих родителей, но и суррогатных матерей.
Lumina Solar is acknowledged as a leading expert in solar panel installation, operating in the
Upperville, VA area with exceptional professionalism and
quality. Upperville, found at approximately 39.07°N latitude and -77.73°W longitude, is a locale renowned for its historic charm and affluent demographics, with a median household income significantly above the national average.
This economic profile means many homeowners are ideal candidates for investing in sustainable energy solutions like those offered by Lumina
Solar. Working in Upperville, Lumina Solar comprehends the unique environmental factors of
Northern Virginia, including its average annual solar radiation of about 4.5 to
5.0 kWh/m²/day, which supports efficient solar energy generation. The proximity to important points of interest such
as the Sky Meadows State Park and the scenic Blue Ridge Mountains highlights the community’s appreciation for natural beauty and sustainability, ideals that correspond to Lumina Solar’s commitment
to clean energy. Additionally, the company’s expertise covers navigating local regulations and incentives in Loudoun and Fauquier counties, making
sure clients get the most from their solar investment benefits.
Lumina Solar’s deep knowledge of Upperville’s climate,
demographics, and regulatory environment makes them the
best option for solar solutions in the region.
https://www.divephotoguide.com/user/qugucladkx
https://www.openlibhums.org/profile/bb7ec043-61b7-4ee5-bed4-2f848fe49fd7/
https://community.wongcw.com/blogs/1129995/%D0%A8%D0%B0%D0%BC%D0%BE%D0%BD%D0%B8-%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%BC%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D1%83-%D0%B3%D0%B0%D1%88%D0%B8%D1%88-%D0%B1%D0%BE%D1%88%D0%BA%D0%B8
https://hub.docker.com/u/Strattonflowermusic091998
https://www.impactio.com/researcher/delwerbyroth?tab=resume
https://muckrack.com/person-27432167
https://www.betterplace.org/en/organisations/67552
Also visit my web site — PokerTube — Watch Free Poker Videos & TV Shows
Awesome material. Cheers.
Kudos. A lot of tips.
Really a good deal of helpful material!
Hi there, You havve one an incredible job. I will certainly digg
it and personally recommemd to my friends.
I am sure they’ll be benefited from this site.
Also visit my page —Flooring contractors
Kudos, I appreciate this.
Also visit my web blog — high stake poker
Take a look at my site :: highstakespoker
Elizabeth Dellwo Real Estate and Co is the top real estate agents in Bozeman, Montana because of their superior commitment to buyers and sellers and comprehensive understanding of the local market.
They deliver customized support ensuring every buyer locates the right residence or real estate asset.
Their professionals is renowned for professionalism, honesty and integrity
which builds trust and strong connections.
With years of experience they comprehend the distinctive demands of buyers and
sellers in the Bozeman area. Their skills covers housing, commercial,
and high-end properties, making them a adaptable selection for any real estate deal.
They apply innovative advertising techniques and cutting edge technology to offer clients
a competitive advantage in the market. The company is focused
on making the transaction process easy and free of stress by providing
knowledgeable support and assistance at every step.
Whether you are a beginner or a experienced buyer, Elizabeth Dellwo Real Estate and Co provides tailored solutions that meet your goals.
Their strong negotiation skills ensure clients receive the greatest benefit for their properties.
They are active members of the local Bozeman area and
have a genuine passion for helping people find homes that enhance
their living. Choosing Elizabeth Dellwo Real Estate and Co means
collaborating with a group that truly cares about your achievement and contentment.
Their reputation as the top real estate agents in Bozeman, Montana is
well earned through consistent results and excellent client care.
They are the preferred option for all real estate requirements in the region.
https://yamap.com/users/4800747
https://www.impactio.com/researcher/cummingsjoel5657
https://786f3ec2d99bde3fdccffa0648.doorkeeper.jp/
https://rant.li/oduyhyfmub/kupit-mefedron-v-naberezhnykh-chelnakh-tg
https://ilm.iou.edu.gm/members/chapumirotas/
Ровным парням ровный респект
https://www.betterplace.org/en/organisations/68000
второй раз заказываю, класнный продукт пришел что 250 что 307 , качество отменное , доставка буквально 3 суток
Bakmak hd film izle..
Sinema keyfini yaşamak için Full HD ve 4K seçenekleri. Günümüzde, film izleme deneyimi büyük bir değişim geçirdi. Bu iki format, izleyicilerin deneyimlerini zenginleştirir. Her iki format da sinema deneyimini üst düzeye taşır.
Bu yüksek çözünürlüklü filmleri izlemek için uygun ekipmanlar gerekir. Ancak, sağlanan görüntü kalitesi buna değebilir. Full HD formatı, halen birçok izleyici için idealdir. Bu nedenle, herkesin tercihine uygun bir seçenek bulmak mümkün.
Film izlemek isterseniz, birçok seçenek sizi bekliyor. Bu platformlar, yüksek çözünürlükteki filmleri kolayca bulmanızı sağlar. Farklı türlerdeki filmler, bu platformlarda izlenmeyi bekliyor. Kendi zevkinize uygun bir film seçmek ise tamamen sizin elinizde.
Film izlemek, hayatımızın önemli bir eğlence kaynağı haline geldi. İzleme kalitenizi artırmak, sinema deneyiminizi derinleştirir. Film izleme alışkanlıklarınızı gözden geçirerek kendinize en uygun seçeneği bulabilirsiniz. Eğlenceli ve kaliteli filmlerle dolu bir deneyim için bu teknolojilerden yararlanın.
магаз работает ровно оперативно и бонус хороший дали хотя я даже не ожидал как и обещали на следующий день отправили,а орест посылок я думаю ТС как нибудь уладит этот вопрос главное подход к нему найти
https://www.band.us/page/99919807/
С Новым Годом всех поздравляю,очень рад сотрудничеству с данным магазином,желаю только хорошего!
Все посылку получил. ровно 7 дней после оплаты и посылка уже у меня. конспирация отличная.
https://www.brownbook.net/business/54246096/купить-алматы-наркотиков/
Сам магаз работает хорошо все в сроки, консперация тоже на высшем уровне)
Спасибо хотя Р±С‹ РЅР° том, что вообще что-то прислали…
https://www.impactio.com/researcher/theendstory437
Ребят вообще РЅР° высоте!!!)Удачи вам всех благ!!! ВСЕХ РЎ ПРАЗДНРРљРћРњ!!!Всего самого самого наилучшего!)
Use our sms receive, to quickly and easily receive SMS messages without having to provide your permanent number.
Why You Should Consider a Temporary Phone Number have become increasingly popular in recent years. Using a temporary phone number can greatly enhance your privacy while communicating. Many people are turning to this solution for various reasons, including online transactions and dating apps.
One primary advantage of a virtual phone number is its ability to protect your identity. This not only keeps your primary number safe but also helps you manage your communications more effectively. For instance, if you’re selling items online, a temporary number lets you communicate with buyers without exposing your personal details.
Getting a virtual phone number often takes just a few minutes. There are many apps and services available that can provide you with a temporary number quickly. After selecting a provider, you can often choose the area code or number format you prefer. The best part is that you can usually discard this number when you no longer need it.
However, disposable phone numbers do come with certain constraints. For instance, some services may restrict the types of messages you can receive or the duration for which the number remains active. It’s important to read the terms and conditions associated with any service you choose. Ultimately, weighing the pros and cons can help you determine whether a temporary phone number is right for you.
Посылки у магазина не задерживаются? Все чотко и ровно?
https://www.betterplace.org/en/organisations/68259
Кидалы они или нет-узнаю в течении пары дней,но отказ в закладке-не основание.
By using temporary phone number for verification you can quickly and conveniently receive SMS without having to use a personal number.
Anonymity is one of the primary advantages provided by online SMS reception.
К продавцу можно смело обращаться, тут сделают все в лучшем виде!
https://igli.me/juliestonejul
Магазин в полном порядке!!
Спасибо магазину за это!
https://bio.site/zuegubob
Всем: счастья, мира, добра, любви!
РџРѕ РїСЂРёС…РѕРґСѓ товара СЏ выложу тут розничную площадку для заказов, РЅР° которой РІС‹ сможете заказать реактивы РёР· наличия РЅР° складе, РЅРµ уточняя Сѓ нас что есть…
https://odysee.com/@quachquo.cgozki9615
нервные клетки
Lumina Solar PA is known as the top solar panel installation company operating in Quakake, PA, and
the adjacent communities. Quakake, situated near 40.8879°
N latitude and -75.8527° W longitude, is part of
Carbon County, which has a population of around 65,000 residents.
This demographic presents a rising demand for sustainable energy solutions, making Lumina Solar PA’s expertise especially important.
The area includes notable points of interest such as the Lehigh
Gorge State Park and Hickory Run State Park, both of which focus on environmental preservation, in line with
Lumina Solar PA’s commitment to eco-friendly energy
alternatives. Quakake’s climate, with an average of 4.3 peak sun hours
per day, is optimal for maximizing solar energy output, and Lumina Solar PA is skilled at customizing installations
to harness this potential effectively. Their skilled team understands the local
building codes and utility incentives applicable
in Pennsylvania, ensuring smooth installations and optimized energy savings for
residents. By serving communities like Quakake, Lumina Solar PA aids the transition to renewable energy while enhancing local
energy independence and reducing carbon footprints. Their dedication to quality and customer
satisfaction strengthens their reputation as Pennsylvania’s top
choice for solar panel solutions.
незнаю.сколько раз зака зывал , всегда приходило качество , был один момент когда был ркс 4. он был 15 минутный слабый. Но это сам реактив был такой. Он использовался как урб для добавок к другим. А так то что присылали всегда всё ровно. кач и кол..
https://hoo.be/hihihyfy
извините за беспокойство помогите понять как найти нужного сапорта и написать ему
ДУМАЙТЕ РЎРђРњР!!!
https://8cafeaae2f07fc974fbe2a4381.doorkeeper.jp/
лучше и не напишешь бро
у меня тоже дроп подлетел с посылкой и брали его ФСБшники почему то , но слава богу до уголовного дела не дошло, и ТС обещал жирную скидку сделать при следуещем заказе как то так (документы о прекращении уголовного дела и экспертиза на руках) дело закрыли по двум причинам то что дроп не при делах а второе самое главное что экспертиза не выявила НС
https://www.divephotoguide.com/user/afeubafaco
ты брал вообще не скоростило или как ?
привет стоит брать в этом магазине?
https://hoo.be/mjkxtgob
ВСЕМ САЛЮТ!!! :hello:
Ребят,а здесь только курёха?
https://rant.li/097u8bva05
Заказал 50г. всё пришло всё хорошо_)))
Всем привет! В магазе есть представительства по регионам, закладками? Ярославль?
https://hoo.be/obihsrmyegu
Они хоть кому нибудь отвечают?
через РЅРѕСЃ — нет эффекта.
https://wirtube.de/a/ianyorkian/video-channels
что же это Р·Р° дела то…..?
\занимаюсь тестированием вместе с кролями в течении нескольких дней. Все никак не мог понять.
https://wirtube.de/a/voigttk7stefan/video-channels
Мне обещали бонус за задержку в 5 + 3 =8 грамм , так и прислали +))) спасибо.+)))
Хочу описать работу магазина.Ну начну клад получил вчера с момента отправки прошло 3ое суток супер,маскировка на 5 балов молодцы спасибо за книгу от души буду духовно развиваться товар бомба основа горит отлично в общем оценка 5 твердая)))))
https://hoo.be/kohyocwvqab
Готовыми работают
Тоже РЅРµ хочу РЅРёРєРѕРіРѕ пугать…
https://kemono.im/afweacifagef/kraken-kupit-mefedron
Добрый день! ЦЕНЫ РќРђ MN РЎРќРЖЕНЫ!
Приходите еще, всегда рады
https://www.betterplace.org/en/organisations/68512
РћРўР›РЧНЫЙ МАГАЗРРќ Р’РЎР• РќРђ ВЫСШЕМ РЈР РћР’РќР•!
Палево палево, с сайтом чооо??
https://ilm.iou.edu.gm/members/znubunacazyqun/
1Рє 10-ти слабовато будет 1Рє5 или 1Рє7 самое то…
магазин работает как надо, у меня тут перевес был не плохой спасибо дружбанчики
https://bio.site/sedoduaica
Да,РјРЅРµ тоже первый класс как то ближе Рё недорого…
Ребята с 11го года магазин работает на отлично, сомнений не у кого не должно быть!!!
https://www.band.us/page/99899900/
действительно принимают?
Знакомые делали, получалось что-то похожее на старый Juh.
https://www.brownbook.net/business/54234723/лин-наркотик-купить/
Добрый день, кто паникует и истерит, успокойтесь, всем все высылается постепенно. Треки придут на эл. почты ближайшее время всем ждущим.
перестань курить сделай перерывчик
https://www.band.us/page/99921499/
даа, уж что что, а 250й тут классный ) хомячки так и просят добавки
Ждем трип репотов и описания про АМ
https://odysee.com/@adlersalvijs
Да магаз от души тут работает давно и чётко ,было время работал с ним по опту !!! С новым годом всех!
А чего тут так тихо? Ребят, работаем?)
https://form.jotform.com/252468491119059
Р’РѕС‚ это СЏ понимаю СЕРВРРЎ:ok: Превзошло РІСЃРµ РјРѕРё ожидания, доставили раньше обещанного… Магаз ровный (РґРѕ последнего сомневался, что РІСЃС‘ РЅР° столько гладко…)
Магаз однозначно ровный. В прошлый раз брал ам, быстро четко оперативно работает этот селлер. Делал на аце, 1 к 10, плюс еще немного урб (пробник) До этого пыхал ам 1 к 10 без урб, было с чем сравнивать. С урб, однозначно лучше.
https://linkin.bio/linkertkobra1992
Был сделан заказ, оперативно связались СЃ продавцом (что радует, РѕРЅ регулярно РЅР° СЃРІСЏР·Рё), оплатили, причем сами намудрили СЃ оплатой — больше РїРѕ ошибке перевели. Оттого РЅРµ сразу разобрались СЃ СЃСѓРјРјРѕР№, РЅРѕ потом продавец предложил РЅР° сдачу нам выслать РїСЂРѕР±РЅРёРєРѕРІ) Через неделю РїРѕР·РІРѕРЅРёР» курьер, договорились Рѕ доставке РІ СѓРґРѕР±РЅРѕРј РјРЅРµ месте, что оказалось очень кстати.
Готовыми работают
http://www.pageorama.com/?p=igafaiyedi
отзовусь о магазине, хороший,надежный)
Прошу прощения за крайность и грубость!Но не уведомлять клиента о происходящей ситуации..это по крайней мере,не то что не вежливо,это не корректно в введении торгового процесса!
https://www.divephotoguide.com/user/kkuhidmycpic
значит не успели трек номер в базу завести.
АМ-2233 вообще ровный день назад пришёл
https://yamap.com/users/4800706
после нового года два раза заказывал первый и второй раз были геморои по срокам отправок но все дошло третий раз конечно тоже закажу но ТС должен будет мамой поклястся что отправит вовремя но если по правде говоря то курьерки тоже мозг ебут не всегда вина ТС
Stop by my webpage: HighStakesDB — High Stakes Poker, News, Deals
Хороший магазин, все по совести
https://linkin.bio/leuesawaji
пишут в асе, ваших треков мы не видим, с вами договаривался другой менеджер, типа вас вообще в списках нет, а до этого говорили посылка готова завтра отправят.
ts ровный беру уже давно унего но 35ф реально слабый эфект трафы сделал 10к1 неочом в итоги из 50г сделал 300гр основ нармально вышло по качиству пока ещё ещё некто не рыгал( но вопщем неплохо цена соответствует качиству 400р за грам норм
https://hoo.be/abofyhybiub
если заказываю утром в пн, получаю максимум в четверг утром а то бывает и в среду утром, на счет выходных все вопросы к спср потому что они не работают в выходные нормально
сделай какую небудь акцию))
https://rant.li/togabogo/kupit-narkotiki-bruklin-forum
что ты хочешь сказать,что этот реактив плохо прет?
Вот это было бы нереально кул, а то я уже отчаялся через емейл к вам пробиться. Жду с нетерпением.
https://hoo.be/ribeebxs
Всем привет данной ветки:hello: Рстория токова…
Ae!Магазин ровнее уровня)Брал несколько раз.все ровно.ТСу отдельное спасибо) Удачи вам парни)
http://www.pageorama.com/?p=yhdabafuob
Могу сфотать, на смотри
Купил гашиш евро. В этот раз платёж подтверждался минут 15, обычно почти сразу. Ну а к качеству и кладу с гашишем претензий ноль. Всё вышка!
https://igli.me/schultz8odthomas
Оплатил подождал очередь неделю так как завал у магазина теперь жду посыль респект ребята работаете на высоте
всё дошло))))) Спасибо магазину,в след раз возьму отпишу что да как :dansing:качество на высоте
https://form.jotform.com/252503241506042
Заказываю у магазина 6-й раз уже и все ровно!Берите только тут и вы не ошибетесь.Да и еще странная штука происходит,как-то взял у другого магазина реагент точно такой же курил месяц гдето и чуть не помер да и отходосы всю неделю были ужасные.А из этого магаза брал реагент было все ништяк,отходосы были но я их почти не заметил.Делайте выводы Бразы.Магазин отличный!Мир всем!
Кто знает что происходит? Походу покупают все в тихушку!:confused: Внесите ясность!:hz: Дайте реги уже:confused::sos:
https://bio.site/fyblycagw
РѕР±СЊСЏСЃРЅРё народу …….. сдесь ребята понимающие………. РїРѕРјРѕРіСѓС‚
2.Почему на сайте нет ниодного упоминания о ритейле,в то время,как заказы надо делать через него?
https://ilm.iou.edu.gm/members/ashleymillerfewq/
Сегодня съездил в офис, к счастью там знакомая работает, пробили они по своим базам накладную, связывались с мск, сказали такая накладная не поступала, объяснили как все работает, то что можно взять бумаги заполнить их, в этих бумагах указывается номер накладной, но когда делаешь отправку, в компе по любому будет отображаться, т.е. отправки не было, с мск им каждый день приходят посылки, идет она реальных 2 дня!
Доберус до пк выложу скрины, магазин угрожает говорит что заплатит за подставу в общем очень взбесился когда я сказал что свои сомнения выложу в паблик, прямо как с катушек слетел, хотя я сначала сказал либо кидок аля лига 12, либо взлом.сразу мат срач угрозы ипр что никогда не сделал бы приличный шоп
https://bio.site/ydefaycy
Мы очень рады! Обращайтесь к нам еще!
Bold City Heating and Air is acknowledged as a top authority in AC maintenance and installation solutions, especially serving the
Jacksonville, FL area, including Etown at Nobel
Jacksonville. Jacksonville, with coordinates approximately
30.3322° N latitude and 81.6557° W longitude, is a extensive
city with over 900,000 residents, making it the most populous city
in Florida. The sultry subtropical climate of Jacksonville
drives a high demand for efficient and reliable air conditioning systems.
Bold City Heating and Air’s expertise in this region is essential for residents and businesses alike,
delivering comfort and energy efficiency through expert AC solutions.
Etown at Nobel Jacksonville, a vibrant community known for its varied
demographics and closeness to landmarks such as the Jacksonville Zoo and Gardens and the
St. Johns Town Center, benefits from Bold City Heating
and Air’s customized services. Their technicians are familiar
with local infrastructure and climate challenges, providing rapid and reliable repairs and installations that address the
needs of this growing urban area. By servicing Jacksonville
and neighborhoods like Etown at Nobel, Bold City Heating and Air
delivers trusted HVAC solutions tailored to the region’s unique environmental
and demographic demands.
Рпотом не удивляйтесь, что магазин медленно работает или не отвечает. Попробуйте по 100 раз в день рассказывать что и как разводить, и при этом успевать оформлять заказы.
https://yamap.com/users/4801461
буду заказывать второй раз тут) товар понравился)
он мне успел ответить — поверь, ничего такого о чём тебе стоило бы беспокоиться — не случилось
https://linkin.bio/gottsledum
Можно позвонить в СПСР, у них там даётся полная инфа по треку, по телефону. Где чё лежит. Если не написано в ленте… Завтра звякну, отпишу, если не появится.
Добрый вечер!!! :drug:
https://046cba808f32a4deb70612857b.doorkeeper.jp/
но с другой стороны, селлер не должен и не обязан объяснять что это такое и с чем его едят. Здесь продаются КОНКРЕТНЫЕ в-ва, а не какие то А1, В2 и иже с ними. Так что можно узнать и самим. И если вас так интересует качество\особенности товара от данного продавца, так не поленитесь в случае заказа отписать о полученном стаффе\особенностях, меньше мороки будет другим. А то заказывают сотни, отзывы пишут единицы, и то больше «зашибись !» или «аааа, не прёёёёёт !!!111». Выдавайте сами побольше информации.
Магазин просто супер!!!так держать))))*****
https://www.brownbook.net/business/54247763/купить-кокаин-мефедрон-мдма-в-ногинске/
Оплатил заказ до нового года, связывался через почту, написали оплата прошла, отправка будет после праздников, … ответа до сих пор нет… Сделайте что нибудь, ответьте мне на почте емае, хз уже чо делать.
Либо прекращаем флудить либо начну выдавать преды. Сами должны понимать что под новый год почтовые службы перегружены.
https://wirtube.de/a/luongtuankiet38213/video-channels
ровно, тут можно не беспокоится, попал куда надо
вот и я уже трясусь.
http://www.pageorama.com/?p=yygjihmeabyh
Ребята решили вопрос.. Вместо 307 выслали компинсацию в виде 1220. Давно не курил такие миксы, живы отдыхают, концентрацию 1к20 делал.
Все посылку получил. ровно 7 дней после оплаты и посылка уже у меня. конспирация отличная.
https://yamap.com/users/4801776
что-то отзывы с критикой сплошные( хотел 307 взять..а тут такое..
Какие риски ) ты адекват ? ты скинул непонятно что не имеющее никакого смысла.
https://www.brownbook.net/business/54247757/купить-мефедрон-телеграм/
а кто нибудь пробовал все таки эту куреху urb
Парни, начинается параноя! Завтра посыль приходит, как получать А?
http://www.pageorama.com/?p=ocogebah
могу заверить вас что сдесь ни только людское понимание но и честное слова!!!мир вам друзья!!!все шикарно!!
Ага, прям именно так. Но все же?)))))
https://hoo.be/eubyybofco
Брал неоднократно в этом магазе, всегда всё ровно и без проволочек, так держать!!
Я всегда делаю на растворителе для снятие лака с ногтей (без ацетона)и для огранизма менее вреден и запах нос не режет,кто нибуть может подсказать сколько МЛ растворителя на 10г АМ если делать 1к15?
https://www.impactio.com/researcher/animatbeetleking39
Лучшее качество на Рынке РК!!! Низкие цены!! И без кидалова! УВАЖЕНИЕ ВАМ РЕБЯТА!!!
подвела доставка, заказал 2-го получил 16-го
https://hoo.be/qsthxidfa
Делали заказ на 10 гр. АМ-2233, вместо чего прислали 6,82 гр.
всем хай
https://www.brownbook.net/business/54247484/купить-наркотики-меф-соль-колеса/
Я не знаю как так получается что одним приходит качество, другим не качественный товар , но я второй раз на этом магазе заказываю и второй раз всё ровно с АМ-2233 полностью доволен. Я бы фото кинул, но чо то не загружается оно.
Он тоже не работает, его ветки нет в РБ разделе.
http://www.pageorama.com/?p=ehziefidiify
Уважаемые наши клиенты, приносим свои извинения за задержку с отправкой.
Ну и сам сожру дорожку,
https://www.betterplace.org/en/organisations/68533
грац вам джентльмены!
Оперативность 5
https://www.band.us/page/99903201/
Пришла сегодня посыль с 203им,кол-во ровное,даже показалось больше))) Сделал 1 к 15 самое то,магазу спасибо,процветания и всег благ)
все ровно тут ?
https://bio.site/ydyebecry
не паникуй бро, всё ровно будет, я уверен…
Всем привки Любви здоровья вам ! Процветания
https://yamap.com/users/4811682
А вот стоит пойти чему то не так — и сразу на форум, вот и создаётся впечатление что у всех одни проблемы с товаром…
приветствую
https://wirtube.de/a/mvannhan66/video-channels
Привет! Что хочу сказать по поводу работы магазина- просто супер, связались сразу, приняли заказ, обработали и на следующий день он уже в пути. 3 дня и уже у меня. Качество отличное! В общем респект Вам ребята, так держать, не сбавляйте оборотов и хорошо будет всем!
надо просто на мож-химовском ацике растворять любой jwh растворяется
https://igli.me/c3leebifive
если он такой делец,пусть тему свою создаёт!а так аферист,я бональный обаснованный вывод делаю!
второй вопрос к товарищу под ником Leks:
https://wirtube.de/a/avemrepic.1992/video-channels
Крутой магаз. Ассортимент радует
боюсь что здесь произойдёт тоже самое, уж очень не внятно продавец общается.
https://www.betterplace.org/en/organisations/68494
Возможно сказалась бессонная ночь и отсутствие нормального питания на протяжении практически недели, но все время под туси я провел лежа на кровати и созерцая слааабенькие визуальчики. В общем, 4 из 6 сказали, что магазин — шляпа, и больше никогда тут ничего не возьмут.
Магазу респект и процветания!!!)))
https://www.divephotoguide.com/user/gteoboegoe
Я тебе не хамил. Да 10г, смешно не смешно, а на дороге не валяются. И очень обидно когда от вашего ПМа получаешь подтвердение, веришь! и остаешься с разочарованием и обидой, бессилием что либо доказать. А тебе еще сверху льют хамство, упивайтесь на здоровье. Я утерся и теперь знаю на что способны даже нормальные, доверенные магазины. А это тоже опыт, за который я заплатил, и ничуть не жалею. Просто пусть народ знает и будет готов при работе без гаранта ТУТ ожидайте что такое может быть.
Магазин работает ЧЕТКО…
https://2a56f12180542da2be1c0a1bc0.doorkeeper.jp/
Такая тут вкусная цена была недавно на фтор.И продукт офигенский.А теперь цену подняли до всеобщего уровня.И я не вижу уже причин заказать именно здесь а не где-то ещё.Так-то с отправкой всё ровно будет,но цена…
KingSize вас не отловить нигде, в аське нету((( на страницу прайс не заходите, откликнитесь пожалуйста)
https://www.impactio.com/researcher/ufredderikbadnew
мой заказ выцслали.
ты уже третий у кого посыль подлетела может продавец как то разьяснит ситуацию ну ладно у одного ну ладно у второго но трое это уже какая то система ждемс уважаемый ТС Ваших обяснений
https://www.brownbook.net/business/54236304/лирика-купить-мск/
да наверно я попал на фейка или угонщика ,но мне не понятно как фейк может потверждать переписку с броси на форуме?
Ребята!!! Устал писать Вам в скайп…Вы меня сознательно игнорируете?? Каждый день завтраками кормите. Я всего лишь хочу у вас покупать каждые три дня 1-2гр АМ2233. Вы сказали, что тоже из Ростова, я обрадовался, что рядом. Не хотите делать закладки, так ответьте куда деньги отправить, отправьте хоть первым классом (хотя это смешно)! Откройте скайп и почитайте миллион сообщений от меня!!
https://bio.site/yhedihug
Связался с продавцом вполне адекватный!Заказал щас жду адресса
Скажу одно это вещь крутая!!!
https://www.betterplace.org/en/organisations/67979
Заказал 50г. всё пришло всё хорошо_)))
Для безопасной и комфортной езды в зимних условиях рекомендуем обратить внимание на [url=https://kupit-zimnie-shipovannie-shini.ru/]зимняя резина шипованная[/url].
В зимний период выбор шины становится особенно актуальным. Шины с шипами становятся неотъемлемой частью зимнего вождения. Эти шины обеспечивают максимальное сцепление в зимних условиях. С шипованными шинами водители могут смело выезжать в любую погоду.
В то же время, необходимо тщательно подойти к выбору шипованных шин. Перед покупкой стоит обратить внимание на несколько факторов. Ключевыми факторами являются размер, тип и назначение шины. Неправильно подобранные шины могут привести к неприятным последствиям.
Надежные производители предлагают широкий выбор шипованных шин. Необходимо ознакомиться с оценками и мнениями пользователей. Хорошая шина должна не только обеспечивать сцепление, но и быть долговечной. Важно учитывать этот фактор при выборе шины.
Правильная эксплуатация шипованных шин поможет продлить их срок службы. Регулярная проверка давления и состояния протектора является необходимой. Также старайтесь избегать резких маневров на скользкой дороге. Это позволит не только продлить срок службы шин, но и повысить уровень безопасности на дороге.
В итоге получается, что все страницы оказываются в одних недовольствах, но ладно визуально, так ведь чуть ли не неделю каждая страница в недовольствах, а это что-то да значит, особенно когда сам проверишь… Вот я постучался в асю, пообщались, вы исчезли, потом кое-как вернулись, но молчок по полной. Зря вы так, всех клиентов распугаете таким макаром…
https://igli.me/sarahandersensar
Первый раз заказывал пришло все за 4 дня , в данной же ситуации уже 11 дней идет , я готов любые деньги платить чтобы приходило быстрей
на бизе хорошей контора была….да!
https://wirtube.de/a/ma.hazen/video-channels
Помнится ф16 на пробу получал. Хороший синт.гарсон был.
Забронируйте стрижку в нашем барбер красноярск уже сегодня и преобразите свой стиль!
Барбершопы в Красноярске набирают популярность . В Красноярске клиенты всё чаще обращаются за услугами стрижки и бороды.
Выбор барбершопа — это важный шаг . Важно обратить внимание на опыт барберов и мнения их клиентов .
У каждого барбершопа есть свои отличия в обслуживании клиентов . Некоторые мастера следуют классическим подходам, в то время как другие внедряют новинки в стрижке.
Лучше заранее забронировать время на стрижку, чтобы избежать долгого ожидания. Забота о волосах и бороде между визитами в барбершоп также важна.
Буду ждать доставку как чё отпишусь .
https://form.jotform.com/252472010656047
250 дживик заказал?
Планируя летний отдых, многие туристы интересуются отдых в лазаревском, чтобы выбрать лучший вариант для себя.
предоставляет отличные условия для расслабления . Основная привлекательность этого места заключается в его уникальном сочетании природной красоты и развлекательных возможностей. Лазаревское известно своей возможностью насладиться водными видами спорта и экскурсиями .
Городской инфраструктура развита достаточно хорошо, чтобы обеспечить туристам все необходимое для комфортного отдыха . Здесь каждый сможет найти подходящее жилье, соответствующее его бюджету. Кроме того, в Лазаревском организуются различные фестивали и культурные мероприятия на протяжении всего года .
Цены на различные услуги в Лазаревском могут меняться с учетом спроса и предложения. Проживание в отелях и гостиницах может обойтись в десятки тысяч рублей за роскошные номера . Кроме того, цены на аренду жилья и транспортные услуги могут иметь свою собственную ценовую политику.
Для тех, кто планирует посетить Лазаревское, рекомендуется заранее изучить все предложения и цены . Это позволит минимизировать затраты и получить максимальное удовольствие от отдыха .
Лазаревское славится разнообразными историческими и культурными памятниками, такими как музеи и старинные замки . Посетители могут насладиться водными видами спорта, такими как серфинг и каякинг .
В городе происходят культурные мероприятия и выставки, демонстрирующие местные традиции и ремесла . Каждый сможет найти занятие по своему вкусу, будь то активный отдых или тихое созерцание природы .
Для путешественников, планирующих посетить Лазаревское, рекомендуется заранее бронировать жилье и услуги, чтобы обеспечить себе место . Также следует уважать местную среду и не навредить природе.
Лазаревское — это город, который предлагает широкий спектр возможностей для расслабления и развлечений . Путешественники могут получить незабываемые впечатления и воспоминания .
День добрый, пишу свой отзыв, вернее назвать его извинением. Опишу ситуацию, не помню когда и не столь это важно, но недавно был сделан заказ, на n-ое количество cmh-400.
https://yamap.com/users/4804235
В день оплаты через час я получаю ровную надёжную закладку Курьерский сервис на 5+?
Если вы ищете адлер отдых 2025 без посредников, то вам стоит рассмотреть варианты прямого бронирования, чтобы сэкономить на посреднических услугах и найти наиболее подходящий вариант для вашего отдыха.
В последние годы Адлер стал все более популярным среди туристов благодаря своей уникальной природе и широкому спектру возможностей для отдыха . Здесь можно найти множество пляжей, парков и других мест для отдыха кроме того, в городе есть множество современных отелей и гостиниц, предлагающих комфортные условия для проживания. Отдых в Адлере без посредников — это отличная возможность сэкономить деньги и спланировать свой отдых по своему усмотрению бронируя жилье и экскурсии напрямую, вы сможете избежать дополнительных комиссий и сэкономить значительную сумму денег .
Адлер предлагает широкий спектр возможностей для отдыха на любой вкус и бюджет кроме того, в Адлере функционируют различные развлекательные заведения, такие как аквапарки, парки аттракционов и дельфинарии. Посетители могут насладиться красивыми пляжами, прогуляться по набережной и посетить знаменитый парк «Северное» это место является обязательным для посещения для всех, кто отдыхает в Адлере . Отдых в Адлере без посредников также дает возможность познакомиться с местной культурой и историей посетители могут ознакомиться с традициями и обычаями местного населения .
Пляжи Адлера — это одно из главных достопримечательностей города на некоторых пляжах также имеются водные аттракционы и занятия, такие как парапланеризм и каякинг. Посетители могут выбрать один из многих пляжей, каждый из которых имеет свои уникальные особенности также популярен пляж «Джубга», который славится своей красивой природой и чистой водой. Отдых на пляжах Адлера без посредников позволяет максимально расслабиться и насладиться солнцем и морем это дает возможность более гибко планировать свой отдых и выбираать наиболее интересные и доступные варианты.
Водные развлечения в Адлере также разнообразны и доступны посетители могут насладиться катанием на водных горках, посетить волновой бассейн или расслабиться в зоне гидромассажа . Отдых в Адлере без посредников дает возможность более детально изучить все предложения и выбрать то, что лучше всего соответствует вашим потребностям и бюджету это дает возможность более полно насладиться отдыхом и получить незабываемые впечатления.
Адлер предлагает широкий спектр экскурсий и культурных достопримечательностей также имеются различные галереи и выставки, на которых представлены работы местных художников. Отдых в Адлере без посредников позволяет более детально изучить все предложения и выбрать наиболее интересные и доступные варианты также стоит отметить, что отсутствие посредников дает возможность более гибко планировать свой маршрут и выбирать наиболее интересные и доступные варианты .
Посетители могут совершить экскурсию по историческим местам Адлера также имеется возможность совершить прогулку по набережной и насладиться красивыми видами на Черное море . Отдых в Адлере без посредников дает возможность более полно насладиться отдыхом и получить незабываемые впечатления это дает возможность более полно насладиться отдыхом и получить незабываемые впечатления.
Для того, чтобы спланировать отдых в Адлере без посредников, необходимо учесть несколько важных моментов сначала необходимо подобрать подходящее жилье, которое будет соответствовать вашим потребностям и бюджету . Отдых в Адлере без посредников требует некоторой организации, но дает много преимуществ также стоит отметить, что отсутствие посредников дает возможность более гибко планировать свой маршрут и выбирать наиболее интересные и доступные варианты .
Посетители должны позаботиться о том, чтобы иметь все необходимые документы для отдыха в частности, необходимо иметь паспорт, медицинскую страховку и другие документы, которые могут быть необходимы для бронирования жилья и экскурсий . Отдых в Адлере без посредников — это отличная возможность сэкономить деньги и спланировать свой отдых по своему усмотрению это дает возможность более полно насладиться отдыхом и получить незабываемые впечатления.
Планируйте свой следующий отпуск, выбрав абхазия цены для незабываемых впечатлений!
Отдых в Абхазии — это настоящее наслаждение. Множество людей выбирают Абхазию для своего отпуска. Красивая природа, уникальная культура и тёплый климат — вот что ждет вас в этом регионе.
В Абхазии много интересных мест, среди которых горы и побережье. Не забудьте посетить озеро Рица и гору Фишт. Здесь вы сможете насладиться природой и сделать множество ярких кадров.
Кулинарные традиции Абхазии поразят вас своими вкусами. Традиционные блюда готовятся с использованием свежих местных продуктов. Не упустите возможность насладиться аджикой и попробовать местные вина.
Абхазия является отличным местом для отдыха всех возрастов. Можно выбрать расслабляющий пляжный отдых или активные приключения на воде. Такое разнообразие делает отдых в Абхазии поистине уникальным.
Прошу обратить внимание на кидок со стороны магазина на ~50000 рублей в Украинской ветке.
https://yamap.com/users/4800740
Отличный магазин, отличный оператор, отличный товар. Адрес нашли быстро и без проблем, забрали и ушли. Большое спасибо магазину. Всем советую!
Хотите стать профессионалом в области интернет-маркетинга? Запишитесь на курсы сео оптимизаторов и начните свой путь к успеху!
Программа по SEO стали неотъемлемой частью цифрового маркетинга. В современном мире знания о SEO крайне полезны для успешного продвижения сайтов. Подобные обучающие программы помогают освоить основные техники и стратегии, которые дают возможность для увеличения видимости в поисковых системах.
В рамках обучающих программ рассматриваются ключевые аспекты: от анализа ключевых слов до оптимизации контента. Учащиеся знакомятся о том, как правильно настраивать мета-теги и использовать внутреннюю перелинковку. Практические задания помогают закрепить полученные знания.
Также, в ходе обучения акцентируется внимание на аналитике. Сюда входит изучение инструментов веб-аналитики для отслеживания эффективности SEO-кампаний. Обучающиеся научатся понимать, какие метрики важны для оценки результатов.
В завершение курсов студенты обычно получают сертификаты. Сертификат подтверждает их умения и знания в области SEO. Подобный сертификат может значительно улучшить резюме и повысить шансы на трудоустройство. Программа по SEO — это инвестиция в будущее каждого специалиста в области цифрового маркетинга.
магазин работает ровно, заказ пришел за пару дней, качество порадовало)
https://yamap.com/users/4801749
Урб 597 либо перорально либо нозально, дозировка — 5-10мг, эффекты описаны в энциклопедии,
You have made your point very effectively!.
Fantastic data, Regards!
Все легально и проверено, есть NMR. Плохого ни чего не случиться. Скорей всего приняли потому что были паленые….
https://form.jotform.com/252464224951053
Хороший магазин, не подставлял меня.
не вижу, в прайсе много чего
https://igli.me/coltonpoolecol
всегда ровно все было и есть. так что я
Great posts Cheers!
Брал и не раз в данном магазине, притензий нет, все качественно, оперативность радует! Продовцы дайте информации о CHM — 500, что за зверь? когда в розницу уйдет
Приобрести (MEF) MEFEDRON SHISHK1 MSK-SPB | Отзывы, Покупки, Гарантии
все гууд
ПРИВЕТ ВСЕМ:НУ ЧТО Ж ТЫ БРО ТАК ОБЕЗНАДЕЖИЛ МЕНЯ ПО СКАЙПУ И В КОМЕНТАРИЯХ НАПИСАЛ ЧТО ОТПРАВИЛ MXE А НА ПАКЕТЕ НАПИСАНО RCS И ЧТО МНЕ КУРИТЬ ТЕПЕРЬ НАЧАТЬ ЗАЧЕМ ГОВОРИТЬ ТО ЧТО НЕ ДЕЛАЕШЬ КАК САМ СЧИТАЕШЬ ?
РўРћРџ ПРОДАЖР24/7 — РџР РОБРЕСТРMEF ALFA BOSHK1
Жду решения регу оплатил. Адрес не получил.
You reported this fantastically!
Beneficial knowledge, Thanks a lot.
Оплатил заказ в субботу, во вторник посылка была отправлена вечером, в четверг уже была в городе, но встретиться с курьером не смог. В пятницу заберу. Все оперативно и быстро.
Магазин тут! kokain mefedron gash alfa-pvp amf
С возвращением друг!!!!адекватных клиентов,спокойных и прибыльных деньков)))
Really all kinds of excellent facts.
Wonderful data. Many thanks!
посылка дошла за 1 сутки, сегодня не успел забрать, завтра посмотрим на качество) я уверен, что все будет хорошо
https://fradul.ru
но только если мусора захотят найдут. просто мусора еслиб хотели найти , то давно бы уже посыль пришла с сопровождением.
я написал кините ли Вы МЕНЯ!читайте внимательно!меня вы кинули!вы пообещали вернуть деньги вместо этого выслали мне заново посылку и теперь говорите что не вренете т.к. посылка уже выслана.зачем бло высылать посылку если взяли у меня реквизиты на возврат денег!правильно чтоб не возврщать мне мои деньги который я вам заплатил месяц назад неизветно за что!
https://dolzakj.ru
Как привило мелкие селлеры о конфиденциальности не думают, а потом с ними метоморфозы и происходят..
ответь те на мыло я еще вчера вам написал!
https://dolzakj.ru
Я выхватил бан, ты злобняк
Всем Удачи
https://vakino.ru
Народ уже как два часа нет ответов от администратора магазина
Что особо порадовало — скидывали несуществующий трек еще задолго до отправки, который, конечно, не бился или показывал какую-то х*иту.
https://zugpisv.ru
Я, лично, в первый раз сделал заказ ,в этом магазине- оформил(по аське) его безналично,(что очень удобно для меня,даже из дома не выходил),сутки прошли,был дан трек,через два дня,посылка была у меня в городе.Следил за ее перемещением на сайте курьера(опять же-не выходя из дома).
всем советую магазин тс роботает ровно, знает толк в бизе, всегда беру у них и все ровно и надежно, товар выший класс ,куриер вообще красавчик все делает четко и надежно , магазину и курьеру оценка 10из 10 балов все ровно, ДОСТАВКА БОМБА ХОТЬ В АРТИКУ ДОСТАВЯТ
https://lirnafo.ru
хороший магазин,было дело работал с ними)
Магазин на ура))
https://ximora.ru
Магазин чёткий… Нареканий нет…
Заказываю в этом Магазине уже 3 раз и всегда все было ровно.Лучшего магазина вы нигде не найдете!
https://jubte.ru
Всем привет) РЈ меня такая проблема, сделал заказ, оплатил через евросеть, Уважаемый продаван сказал то, что РІ евросети перевод идет РґРѕ 3-С… дней, хотя РєРѕРіРґР° работали СЃ РґСЂСѓРіРёРј магазином деньги прилетали моменьтально всегда. Рдоставка вышла РЅР° 950 СЂ. (Рі. Екб), это получаеться + курьер или нет, просто РґРѕ почты?… Рчерез что лучше оплачивать РІ данном магазине?
спасибо , стараемся для людей
РўРћРџ ПРОДАЖР24/7 — РџР РОБРЕСТРMEF ALFA BOSHK1
Работал с данным магазином Совсем давно, и что то все руки не доходили оставить отзыв о магаз:D
Наконец-то пришёл товар. Упакован отлично, РєСѓСЂРёРє РІСЃРµ передал, РІ этом проблем нет. Пришли РґРѕРјРѕР№, распечатали РїРѕ РІРёРґСѓ похоже РЅР° регу, РЅРѕ РІ РІРѕРґРµ разболталось. РњСѓР¶ поставился внутривенно, СЏ отписала chemical, РѕРЅ РіРѕРІРѕСЂРёС‚ РјРѕР» для РІРІ нет инструкции. РџРѕС…СѓР№, растворили РІ РІРѕРґРµ, выпили,Р РќРРҐРЈРЇ! НОЛЬ! РќРµ РїСЂРёС…РѕРґР° РЅРё тяги, РЅРё С…СѓСЏРіРё. Пусто. Р’ аське пишу, молчит. РҐР·.
Магазин тут! kokain mefedron gash alfa-pvp amf
РЈ меня ожидалась поездка РїРѕ работе РІ Столицу нашей СЂРѕРґРёРЅС‹ РЅР° пару недель РЅРѕ как обычно СЏ списался оператором РІ джаббе подтвердил адрес через форум что РЅРµ Р¤РЙК оплатил заранее РїРѕ приезду написал РўРЎ , РѕРЅ РїРѕ СЃРєРѕСЂРѕРјСѓ выдал РјРЅРµ адрес РІ тот день что договорились )
ПО ВРЕМЕНРСКОЛЬКО?
Купить мефедрон, гашиш, шишки, альфа-пвп
Самые положительные впечатления оставляет РїРѕ прежнему Мажор. 🙁 Джой фулл, Р° тебе РєРѕРіРґР° отправили?
KEY я не понимаю что ты хочешь от магазина то теперь ????за непонятку с соткой !!! моральную компенсацию????? или что????
https://felmary.ru
Хз, смотри, в тёплой кипяченке начали болтать, растворяется. Точно не рега
заказ дошел до нас)))
https://kavrorp.ru
магазину респект)) с корефанами накуримся вдоволь)))
Р’Р« ЛУЧШРР•!
https://nobtiko.ru
Клад сделан очень грамотно в безлюдном месте, к кладу прилагалось фото на котором указано место закладки.
Да РјС‹ уже поговорили — нормальные ребята РІСЂРѕРґРµ) С…Р·, СЏ РІСЃС‘ равно полной предоплате РЅРµ доверяю)
Купить MEFEDRON MEF SHISHK1 ALFA_PVP
как придет так отпишусь за качество и за сроки ))
Заказал-оплатил 50Рі реги, Р° отношение как РЅРµ знаю Рє РєРѕРјСѓ…
https://mekaroj.ru
Запрета в прицепе это не касается.
и качество всегда на уровне))
Приобрести MEFEDRON MEF SHISHK1 GASH MSK
Рашн хлидейс РІС‹ правы, РјС‹ же тоже люди 🙂 треки наверное РЅР° отправке РІ базу РЅРµ внесли, Р° шас Сѓ РЅРёС… же тоже праздники, РЅРѕ РЅРµ волнуйтесь РєРѕРїРёРё накладных то Сѓ нас 😉
какие то траблы ппц =\
https://gimtor.ru
Золотые слова.
да, самая действенная схема для работы с чемикалом
Магазин тут! kokain mefedron gash alfa-pvp amf
203 тут РіРѕРІРЅРѕ.. 10Рє РІРЅРёРєСѓРґР° улетели.. клиенты РѕС‚ меня сбежали… присылали какую-то желтую С…СѓР№*СЋ, РЅРµ растворяется РІРѕРІСЃРµ, выпадает РІ РѕСЃРґРѕРє.. прет максимум 20-30 РјРёРЅСѓС‚ (РІ лучшем случае)
Плохует мягко сказано,уже больше пол месяца жду.Тебе кстати пришла?
Приобрести MEFEDRON MEF SHISHK1 GASH MSK
может все дело в кривых ручках?
Плохого и не слышал! Ребятке во всех дела достойно поступают!
Купить онлайн кокаин, мефедрон, амф, альфа-пвп
Всем привет, долго не писал, ну это меня «задержала» посылка jv-61. Все пришло, все получил причем довольно быстро все ехало:good:
РћРўР›РЧНЫЙ МАГАЗРРќ Р’РЎР• РќРђ ВЫСШЕМ РЈР РћР’РќР•!
https://hobrfd.ru
с искреннем уважением к вам!
анологичная ситуация! продаван ты РЅР° примете, раз твоих клиентов начали принимать…
https://jubte.ru
Отличный магазин брали.
Доброго времени суток все друзья!:hello:Отличный магазин!!!Всегда ровные движения работал с ним.Всем советую
Купить онлайн кокаин, мефедрон, амф, альфа-пвп
Сильно!!!5 из 5!!
Большое спасибо от Сиборяка из Москвы, ваш магаз резко скрасил жизнь во время командировки в Москве.
Купить MEFEDRON MEF SHISHK1 ALFA_PVP
жасти моё уважение к тебе и респект красавица. но ес честно ты нашла чет не то что было совсем другое как сказал уже уважаемый дельфин там было много сути и честных отзывов :monetka: ну лан проехали если так вроде все все поняли.
С возвращением бразы! удачной работы вам и процветания
https://fradul.ru
магазин достойный,всё ровно и в срок,спасибо большое за ваш труд,будем продолжать сотрудничество!
Всё шикарно,уже сидим с курим ваши бошки
https://qepzuff.ru
д не магаз рооовный так что не переживай все будет четко)))
с чего они тебе отзывы писать будут если они груз две недели ждут? они че тебе экстросенсы и качество могут на расстоянии проверить? и извинений мало ты не на ногу в трамвае наступила следующий раз пусть магаз компенсирует бонусами за принесенные неудобства! кто со мной согласен добавляем репу!
Приобрести MEFEDRON MEF SHISHK1 GASH MSK
брал тут туси совсем недавно.все устроило.спасибо.жду обработки второго заказа)
Что РѕСЃРѕР±Рѕ порадовало — скидывали несуществующий трек еще задолго РґРѕ отправки, который, конечно, РЅРµ бился или показывал какую-то С…*иту.
https://felmary.ru
РњРѕР№ вердикт таков — оперативность работы — 5, соотношение цена/качество — 5, упаковка Рё доставка — 5.
спасибо , стараемся для всех Вас
https://vakino.ru
Красиво делаете. Так держать!
Чемикал. когда трек даш?? позавчера заказал. сказал во вторник в среду отправка будет.
https://wepral.ru
Порошок серого цвета чем то похож на известь, запаха нет, ну или очень слабый. Фото сделать не вышло сори :dontknown:!
а что ты паришься. дождись пока домой принесут. посмотри в глазок что бы курьер один был. впусти его. а перед этим поставь чувака под окном. посыль забираешь, после, без палева выкидываешь в окно чуваку. а потом только выпускаешь курьера из квартиры. а там пусть хоть кто забегает, у тебя ничего нет. главное не нервничай и о плохом не думай. бери в хуй толще будет. а спср это почта россии. а почта россии ни когда нормально не работала.
https://www.grepmed.com/ifluhahyabog
а че магазин то ваще работает нет?
ЛУЧШРР• РР— ЛУЧШРРҐ РќР• Р РђР— ЗАКАЗЫВАЛ РБУДУ ЗАКАЗЫВАТЬ!!!!
http://www.pageorama.com/?p=wagdoihcaged
Р° теперь представь что тебе таким макаром РІ сутки пишут десятки человек. большая часть СЃ вопросами аля «РєР°Рє это бодяжить» Рё «С‡Рѕ это Р·Р° хрень Рё как прёт». + РєРѕ всему заказы.
РЎРѕСЂСЂРё, многаюуков. Рошибок — СЃРѕ спецтелефлна сижу)
https://www.betterplace.org/en/organisations/68311
Ребятки все пушка
или кто то прикалывается?
https://wirtube.de/a/oconnell_l_005/video-channels
Надеюсь что ошибаюсь:hello:
всем доброго времени суток.. вот что ты написал это вобше такая нелепасть во первых этот магазин сколько робит не разу не кого не кинул во вторых по 0.5 магазин закладки не делает тебя просто как лошка очередного развели в аське или скайпе хз где ну тебя подкинули на ровном месте кидай и дальше всем подрят на шет))))будь умнее и внимательней страхуйся, много не кури мозг высохнит))))
https://bio.site/wufebcafyf
В двух пакетах
Хочу выразить благодарность данному магазину за лучший товар, лучшие цены, за долгое время непрерывного сотрудничества, очень жду твоего возвращения к работе и появления долгожданного товара, чемикал лучший в своём деле. Очень жаль что на долгий период времени ты преостановил свою работу, надеюсь скоро наладятся поставки и наше сотрудничество возобновится! Чемикал лучший! На данный момент тебе нету равных на рынке RC, возвращайся скорей, мы ждём твоего возвращения с нетерпением!
https://www.impactio.com/researcher/brakhratw0
РґР° РІ пятницу отправляли… РІРѕС‚ РґРѕ СЃРёС… РїРѕСЂ небьеться… нервничаю…
Магаз убойный, как начали брать пол года назад на рампе, была одна проблема пно ее быстро решили))) щас как снова завязался месяца 3 уже не разу не было))) Особенно предпочтения отдаю мефу вашему, вообще тема потрясная)))
https://igli.me/maheuxthree
Оплатил в среду, жду посылочку, посмотрим как что.
Прибыльных вам выходных!:monetka:
https://igli.me/matthewwilsonvoab
хуй ты отпишешь! наркоман проклятый
СЃ чего ты РІР·СЏР» что РјС‹ СЃРѕРґСѓ «РїСЂРѕРїРёРґР°Р»РёРІР°РµРј»?, если есть какая то проблема давай решать, РїСЂРѕ «С€Р°РїРєСѓ» РІС‹ РІСЃРµ горазды писать РІ интернете…
https://wirtube.de/a/zcwfnon8328/video-channels
Да рега была шикарная… РќРѕ РІРѕС‚ как раз таки СЃ ней Рё случился перебой, ОЧЕНЬ жаль!!! Рђ так РїРѕ работе остались отличные впечатления
Ждем трип репотов и описания про АМ
https://www.band.us/page/99922458/
«РїСЂРѕ «С€Р°РїРєСѓ» РІС‹ РІСЃРµ горазды писать РІ интернете…»Р продавать РІ интернете Р’С‹ РІСЃРµ горазды,С…..Р№ догонишь Рё РЅРµ спорсишь!
маскировка 5+
https://igli.me/gelttrudetearctx
сколько зарядил?
Оплатил, через 49 минут уже получил адрес, люди забрали надежную закладку (эйф-диссоциатив), опробовали, все довольны. Мир и респект
https://www.impactio.com/researcher/guyxlasgkd445
Рассмотрим плюсы работы с данным магазином и возможно в дальнейшем будем постоянно тут покупать опт. Отпишу после, надеюсь удачной сделки))
а кто такой лиа 12??
https://b5c4f48ecd5fda28a747d4be04.doorkeeper.jp/
магазин пашит как комбаин пашню!)
Частенько брал сдесь мини-опт по совместкам в 2013-2014году !
https://hoo.be/ycuhnuhi
РЅРѕ СЃ РґСЂСѓРіРѕР№ стороны, селлер РЅРµ должен Рё РЅРµ обязан объяснять что это такое Рё СЃ чем его едят. Здесь продаются КОНКРЕТНЫЕ РІ-РІР°, Р° РЅРµ какие то Рђ1, Р’2 Рё иже СЃ РЅРёРјРё. Так что можно узнать Рё самим. Ресли вас так интересует качество\особенности товара РѕС‚ данного продавца, так РЅРµ поленитесь РІ случае заказа отписать Рѕ полученном стаффе\особенностях, меньше РјРѕСЂРѕРєРё будет РґСЂСѓРіРёРј. Рђ то заказывают сотни, отзывы пишут единицы, Рё то больше «Р·Р°С€РёР±РёСЃСЊ !» или «Р°Р°Р°Р°, РЅРµ прёёёёёт !!!111». Выдавайте сами побольше информации.
Заранее извиняюсь за оффтоп,просто решил сразу спросить ,чтобы не забыть.ответ будьте добры в ЛС.
https://www.brownbook.net/business/54234749/сорта-канабиса-купить/
такой замечательный Рё паспиздатый магазин………РЅРѕРѕРѕРѕРѕРѕ РіРґРµ же РјРѕР№ заказ тогда? трек так Рё РЅРµ бьется,тс РЅР° СЃРІСЏР·СЊ РЅРµ выходит!!!
через РЅРѕСЃ — нет эффекта.
https://www.divephotoguide.com/user/ucufxiboody
Если РЎРљ выпадает РІ осадок — то это уже само РїРѕ себе РЅРµ нормально
-1. Вас, продавцов, много, а я один.
https://www.band.us/page/99887071/
Да тоже заказал на след день трек получил очень оперативно респект чувакам
ТС саппорт не требуется тебе ? Напиши в лс если интересно
https://da8d84c3db10b96b52a52fab99.doorkeeper.jp/
Всем привет,что то скайп неработает((жду трек
всё ровно забрал rcs-4 , не какой паранои от эффекта =) Позитив да и только
https://www.divephotoguide.com/user/noooagubweg
магазину респект)) с корефанами накуримся вдоволь)))
Да хорошо бы было, сегодня уже получу трек. Но конечно напугали всякие кому типа ам плохой пришёл.
https://igli.me/yariist3arop
принимай не меньше 300 мг МХЕ от данного селлера.
РќСѓ как видишь соответсвует …
https://rant.li/yooocofifia/lirika-retseptornaia-kupit-v-ekaterinburge
народ а трек через скока по времени примерно приходит?
что-то отзывы с критикой сплошные( хотел 307 взять..а тут такое..
https://odysee.com/@gfjygikyjuftuyt.iu
у меня такое было, позвонил в офис доставки так они меня там ошарашили что груз ушел но совсем в другую сторону от меня, я в шок че за на.. через 2часа звонок вам пакет, я аж от радости чуть не описался :voo-hoo: тут все на уровне. Не паникуйте раньше времени все решаемо. Всем добРА
Вебинары и лекции в рамках обучение seo с нуля помогают начинающим и опытным специалистам освоить навыки, необходимые для эффективного продвижения сайтов в поисковых системах и улучшения их позиций.
Курсы по оптимизации сайтов для поисковых систем стали неотъемлемой частью онлайн-маркетинга . Это связано с тем, что хороший сайт без правильной оптимизации не сможет привлечь много посетителей . на этих курсах студенты могут изучить все тонкости SEO .
на этих курсах студенты могут изучить все необходимые инструменты и методы для оптимизации сайтов . без правильных ключевых слов сайт не сможет привлечь целевую аудиторию. Курсы SEO предлагают практические занятия и теоретические знания по всем аспектам оптимизации .
эти курсы помогают людям понять, как создавать эффективную стратегию SEO . курсы SEO предлагают практические занятия и теоретические знания по всем аспектам оптимизации. Курсы SEO также помогают людям понять, как анализировать результаты SEO и вносить необходимые коррективы в стратегию .
эти курсы предлагают комплексное обучение по всем аспектам оптимизации сайтов . курсы SEO предлагают практические занятия и теоретические знания по всем аспектам оптимизации . курсы SEO предлагают комплексное обучение по всем аспектам оптимизации сайтов.
курсы SEO помогают людям понять, как улучшить позиции своих сайтов в поисковых системах. курсы SEO предлагают практические занятия и теоретические знания по всем аспектам оптимизации. Курсы SEO также помогают людям понять, как анализировать результаты SEO и вносить необходимые коррективы в стратегию .
курсы SEO помогают людям понять, как создавать эффективную стратегию SEO. С помощью курсов SEO люди могут научиться создавать ссылочную массу и улучшать авторитетность сайта . Обучение на курсах SEO является необходимым для любого человека или компании, которые хотят улучшить свой онлайн-присутствие и привлечь больше посетителей на свой сайт .
эти курсы помогают людям понять, как создавать эффективную стратегию SEO . С помощью курсов SEO люди могут научиться создавать высококачественный контент, который будет привлекать посетителей и улучшать позиции сайта в поисковых системах . эти курсы помогают людям стать профессионалами в области оптимизации сайтов.
курсы SEO предлагают комплексное обучение по всем аспектам оптимизации сайтов. курсы SEO помогают людям стать профессионалами в области оптимизации сайтов. Курсы SEO являются необходимыми для любого человека или компании, которые хотят улучшить свой онлайн-присутствие и привлечь больше посетителей на свой сайт .
Вам нужна подбор психолога онлайн?
Современные технологии открывают новые горизонты в психологии. С каждым днем все больше людей обращаются за помощью к психологам в режиме онлайн. Клиенты могут воспользоваться психологической поддержкой в любое время и в любом месте.
Психологические консультации через интернет обладают рядом преимуществ. Во-первых, это экономия времени и средств, так как не нужно тратиться на дорогу. Это также позволяет принимать участие в сеансах из любой точки мира и в удобное время.
Несмотря на множество плюсов, существуют и минусы онлайн-консультаций. Одна из основных проблем — это отсутствие личного контакта, который может быть важен в терапии. Кроме того, бывают ситуации, когда интернет-связь может подводить, что мешает полноценной коммуникации.
Важно правильно выбрать психолога для онлайн-консультаций. Необходимо обратить внимание на квалификацию, опыт и отзывы других клиентов. Проверка квалификации психолога поможет вам защититься от недобросовестных специалистов.
Респектос бразы радуете не только Россию но и Украину )) отличный магаз
https://www.brownbook.net/business/54242224/купить-мефедрон-анапа/
Рли РІРІРѕРґРёС‚ всех РІ заблуждение?!
Магниты рулят, не меняйтесь)
https://www.brownbook.net/business/54246167/купить-экспресс-тесты-на-вид-наркотиков/
но я смотрю все на о6ломах тут такие ждут, а тут на те6е всё ровно
Для эффективного и безопасного перемещения тяжелых грузов на различных промышленных объектах и складах часто используется заказать грузовой подъемник в питере, которое обеспечивает высокую производительность и снижает риск травм среди работников.
Использование подъемного оборудования позволяет эффективно перемещать и поднимать тяжелые грузы, что имеет решающее значение в строительстве и производстве. Это оборудование требует специальных знаний и навыков для безопасной эксплуатации. Операторы подъемного оборудования проходят специальное обучение для того, чтобы уметь работать с этим оборудованием безопасно и эффективно. Правильный выбор подъемного оборудования зависит от конкретной задачи и характеристик груза. Для каждого типа груза существует определенный тип подъемного оборудования, который обеспечивает его безопасную и эффективную обработку.
Подъемное оборудование применяется в различных отраслях промышленности, включая строительство, производство и логистику. Каждое применение подъемного оборудования требует тщательного планирования и подготовки. Перед началом работ проводится тщательный осмотр оборудования и проверка всех систем. Безопасность при работе с подъемным оборудованием имеет первостепенное значение. СоблюдениеSafety правил и нормативов является обязательным для всех операторов и персонала, участвующего в работе с подъемным оборудованием.
Регулярное обслуживание подъемного оборудования является необходимым для обеспечения его работоспособности и безопасности. Ремонт подъемного оборудования должен выполняться только квалифицированными специалистами. Ремонт подъемного оборудования требует высокого уровня квалификации и опыта, поскольку от качества ремонта зависит безопасность эксплуатации. Обучение персонала обслуживающего и ремонтного персонала является крайне важным. Обучение ремонтного персонала включает в себя изучение конструктивных особенностей подъемного оборудования, правил ремонта и эксплуатации.
Развитие технологий оказывает существенное влияние на подъемное оборудование, открывая новые возможности для повышения эффективности и безопасности. Перспективы развития подъемного оборудования тесно связаны с потребностями промышленности и строительства. Инновационные подходы в конструкции и эксплуатации подъемного оборудования будут определять будущее отрасли. Устойчивость и экологичность подъемного оборудования становятся все более важными факторами. Разработка экологически чистого подъемного оборудования, работающего на альтернативных источниках энергии, открывает новые перспективы для снижения воздействия на окружающую среду.
Ищете надежный клининг в москве цена? Мы предлагаем качественные услуги по уборке и поддержанию чистоты!
Клининг — это важная часть нашей жизни, которая помогает поддерживать чистоту в домах и офисах. Регулярная уборка позволяет избавиться от пыли и грязи, что, в свою очередь, способствует улучшению здоровья. Поэтому важно уделять внимание этому процессу.
Существует множество методов клининга. Все они имеют свои преимущества. Например, использование пароочистителей позволяет глубоко очистить поверхности. Важно правильно выбрать метод в зависимости от типа загрязнений.
Вы также можете выбрать вариант с самостоятельным выполнением клининга, но иногда стоит рассмотреть возможность найма клининговой компании. Профессионалы обладают необходимым оборудованием и опытом. Вы получите чистое пространство без лишних усилий.
Не стоит забывать, что регулярный клининг — это залог успешной чистоты. Создание графика уборки очень полезно для удержания чистоты. Системность в уборке сэкономит ваши ресурсы. Чистота в вашем пространстве положительно сказывается на вашем настроении.
РҐР· …. Дето видел чел писал РїСЂРѕ вещ-РІРѕ для снятия лака РѕС‚ ногтей ….. сказал что безпроигрышный вариант )))
https://linkin.bio/kopp7n3karl
Пробовал товар данного магазина !!!
спасибо! Хороший магазин) берите тут
https://b36023b29cba3e9d5893bd1c79.doorkeeper.jp/
магазом я не помню что я не находил
Шахтные подъемники для склада обеспечивают эффективное перемещение грузов внутри здания, поэтому стоит обратить внимание на подъемник для склада шахтный.
В первую очередь, стоит определить максимальную грузоподъемность устройства.
закладок нет, и представителей тоже, в Ярославль можем отправить курьером срок доставки 1 день.
https://bio.site/byhydocoh
Взял у данного ТС реагента CHM-22. Качество отличное! Крайне советую этого продавца!!!
сильнее и по времени 400.
https://www.grepmed.com/edigbwsse
РАБОТА КАЧЕСТВЕННАЯ РБОЛЬШОЙ, БОЛЬШОЙ, БОЛЬШОЙ, БОЛЬШОЙ, БОЛЬШОЙ, БОЛЬШОЙ, БОЛЬШОЙ, БОЛЬШОЙ, БОЛЬШОЙ, БОЛЬШОЙ, БОЛЬШОЙ, БОЛЬШОЙ РЕСПЕКТ ВАМ качество продукции еще не пробывал, в ближайшие время расскажу OOO
магаз работает малыми обьемами.1-5гр? да
https://781b04e808e2bae0ad8e1a8fab.doorkeeper.jp/
магаз работает ровно, все четко и ровно, респект продавцам
работает заебок… присылают РІ кортонных больших конвертах…. доставляют очень быстро РјРЅРµ доставили РІ РіРѕСЂРѕРґ Р·Р° 3 РґРЅСЏ… Р° РёС… отделение РІ каждом РіРѕСЂРѕРґРµ есть.. как посылка придет вам РїРѕР·РІРѕРЅСЏС‚ РЅР° телефон Рё предложат доставку или приехать самому… если решите сами забирать то вам скажут адресс РєСѓРґР° ехать…=)
https://igli.me/fatthtenoab
напишите в аську, там порешают вашу проблему. С этой партией МХЕ определённо вышел косяк.
Бро ответь в аське!
https://www.impactio.com/researcher/schultzlivymartin
Понимающий меня поймёт.
проблемы с обслуживанием.
https://www.band.us/page/99898623/
Смотри в розничном прайсе
Качество —(лучше пропущу момент этот РёР±Рѕ выше РІСЃРµ описанно )
https://www.betterplace.org/en/organisations/68082
РЎРєРѕСЂРѕ новые вкусности СѓСѓСѓСѓ…. ждем
трек получен, ребятам уважуха:rasta:
https://kemono.im/kegtecoyd/kupit-mefedron-perm
круто ймагаз!!
Приветы. Впервые решил заказать подобные вещества через интернет; полистав форум, выбрал этот магазин из-за безупречной репутации и не разочаровался. Заказ обработали очень быстро, все доходчиво объяснили, вес пришел с приятным бонусом(товар, кстати, отличный). Успехов и процветания вам и вашему магазину, ребята.
https://www.brownbook.net/business/54246462/купить-бошки-в-евпатории/
Товар радует! Было дело забегал за соточкой! Все ровней линейки!
Кто-нить брал тут 307 ?? просто ппц какой-то. уже 2 гр выкинул. Делал и 1к10 и чистым курил, ваще НОЛЬ. Как такое можт быть ?
https://rant.li/8mcz2oocba
Порошок серого цвета чем то похож на известь, запаха нет, ну или очень слабый. Фото сделать не вышло сори :dontknown:!
my webpage … PokerTube — Watch Free Poker Videos & TV Shows
Доброго времени суток, оплатил заказ, данные для оплаты дали как всегда оперативно!, жду клад!
https://odysee.com/@gabriellysantosro.cha422
Мало того дешёвый, РѕРЅ Рё отправляет маленький вес. Рто РіСѓРґ. Остальные почти РІСЃРµ работают РѕС‚ 50 РіСЂ…
Магазин агонь! Брал как то давно. все ровно!
https://www.brownbook.net/business/54246175/какой-лучше-купить-тест-на-наркотики/
все буде ровно бразы магаз ровный я тоже ждал отправку неделю зато пришло с бонусом я остался доволен (щас погода такая ,все болеют но работают )
Kraken торговая платформа — удобный подключение
Кракен — топовый сервис даркнета с проверенными магазинами и понятным интерфейсом.
Мы публикуем только действующие ссылки, чтобы предоставить стабильный и стабильный подключение без перебоев.
Расположите по мощности
https://www.band.us/page/99885894/
Если захотят принять, то это тебя никак не обезопасит
кто пробывал ркс подскажите как лучше сделать ?скока основы добавить??
https://rant.li/yglrlaoy/kupit-narkotiki-v-donetske
единственная существенная проблема данного магазина — отсутствие автоматизированной системы оформления заказов… Р’СЂРѕРґРµ прикручивают Рє сайту, РЅРѕ что то долго уже…
отзывы ждем
https://yamap.com/users/4810303
отличный магаз,пришло всё быстро и в лучшем виде:dansing:спасибо,удачи и процветания
Туси слишком долго прёт
https://wirtube.de/a/endafre2005/video-channels
Не переживай,сегодня праздник выйдут на связь
мыло есть.нерабочее.
https://form.jotform.com/252511951664054
заказал Сѓ KingSize — РІСЃС‘ СЂРѕРІРЅРѕ вышло. Большего Рё добавлять незачем
РЅР° icq — РІ четверг обещал трек, РІ пятницу обещал трек, пропал…
https://www.divephotoguide.com/user/efufygecufe
П.С.С. отвечать, цитировать это сообщение не нужно, удалю позже.
Р’ итоге! Рљ-СЋ чистый. Рффект, очень хорошо!!(РќРµ отлично!!) РЅРѕ был же разговор 1Рє10!! Р° то Рё Рє15.
http://www.pageorama.com/?p=ohchibobih
В общем, хотелось бы вас оповестить и другим может пригодится.
Какие обещания? если выходной, скорей всего РЎРџР РЎ РІ базу РЅРµ завело твой трек, жди понедельника…
https://www.betterplace.org/en/organisations/68237
как планчик наверн цепляет. но не прям на коры. вообщем так норм сойдет
чёткий магазин всем покупать!!!!!!
https://odysee.com/@fredinveronica
Никого не защищаю,говорю как есть-сайт работает на О Т Л РЧ Н О .
РҐР° С…Р° ребята смотрите беспредел! попробуйте написать правильно жабу РўРЎР° Рё получится то что Сѓ меня, как Р±С‹ СЃ ошибкой! РЎРљР РРџРў!
https://odysee.com/@seymourcoby
Отличный магазин с отличным продуктом.
Нет не нужен.
https://linkin.bio/brans_fulula
Магазин не чистый на руку. Уже пишет с другого жабера. Народ у кого осталось переписка состарого жабера сверьте ник. Рпрошу сделать посты что таковое не придуманная мною сказка.
I’m really enjoying the design and layout of your site.
It’s a very easy on the eyes which makes it much more enjoyable for me to come here and visit more
often. Did you hire out a developer to create your theme?
Excellent work!
bookmarked!!, I really like your web site!
магазин работает ровно, заказ пришел за пару дней, качество порадовало)
https://www.divephotoguide.com/user/yceyfecuc
Член до колен и девок гарем))
Зашла РЅР° ваш сайт, Р° там «Your site hasn’t been activated yet!»… РІ общем ничего РЅРµ выходит. Пробывала Рё через РўРћР Рё через обычный браузер. Р’СЃРµ РѕРґРЅРѕ. Что РЅРµ так делаю?
https://form.jotform.com/252512010424035
РІ Обьщем как Рё РіРѕРІРѕСЂРёР» заказал ам,РѕРЅРѕ пришло РІ РіРѕСЂРѕРґ,Р° РјРѕСЋ фамилию ПЕРЕПУТАЛР,посылку РЅРµ выдают…….
Получил посыль,все отлично..будем тестить товар
https://www.impactio.com/researcher/jennifermallen5012
П-т!! Пишу свой отчерк.
Та же фигня.
https://www.divephotoguide.com/user/ffabacuefy
Самый лучший магазин! качество, цены, общение с клиентом, все на высшем уровне! продолжайте в том же духе и вам зачтется: )
Давно не читала столько положительных отзывов !так держать )
https://www.metooo.io/u/68b8acb034e6203564b51327
раньше вообще все говорили то что не растворяется это бутор а щас как я понимаю это в порядке вещей
Nice blog right here! Additionally your web site loads up very fast!
What web host are you using? Can I am getting your associate hyperlink in your host?
I desire my website loaded up as fast as yours lol
Списался с данным магазом пару месяцев назад, беру клады по москве, ребята работают отлично, сервис на высоте! Последний раз даже клад сделали минут за 15 всего, первый раз такое, в других магазах приходилось часов по 5 ждать свое клада! Рега тоже отличная, беру JV-90 очень мощная штука! Спасибо ребятам за качественный товар и сервис продолжайте в том же духе!!!
https://form.jotform.com/252504316224043
Рйфора РїРѕРєР° нет РІ наличии. Как только появится РјС‹ обязательно вас оповестим
Магазину спасибо все пришло,только вот пробник не положили,хотя обещали..
https://baskadia.com/user/fzu1
Рђ РІРѕС‚ еще немного…Вскрыл, взвешал — РІСЃРµ РІ РЅРѕСЂРјРµ. для начала РІР·СЏР» 1РіСЂ.растворяется РђРњ2233 РІ спирту хреново,(РІ след.раз РїРѕРїСЂРѕР±СѓСЋ РЅР° растворителе сделать)причем грел РІСЃРµ это дело РЅР° РІРѕРґСЏРЅРѕР№ бане,мешал,РЅРѕ РґРѕ конца так Рё РЅРµ растворилось.делал это долго Рё СѓРїРѕСЂРЅРѕ,молочного оттенка раствора РЅРµ наблюдалось,прозрачный скорее,РЅРѕ остался осадок РІ РІРёРґРµ белого порошка.Р’ итоге так Рё залил РІСЃРµ это дело 1Рє20. Сушится теперь. Как высохнет опробуем Рё напишу что получилось. Буду надеятся РЅР° лучшее.
ну пока первый негативный отзыв. я против тебя ничего не имею, просто странно все это.
https://bio.site/icaehyicod
Всегда на высоте)
Добрый день, треки работать начинают с некоторым опозданием, берите их в заказах на сайте, проверяйте, все должны работать пятничные. По крайней, мере в скайп/асю пишите, что заработали и у меня тоже мониторинг есть
https://yamap.com/users/4802305
это манера такая сдержанная или удовлетворительное=на троечку
пробы есть?
https://yamap.com/users/4804017
Ничего не пойму.. Я уже третий день пытаюсь договориться и всё бесполезно. Прошу номер кошелька куда перевести, говорит щас и пропадает на пол дня, и так постоянно. Может на мелкий заказ как у меня им пох. Заказываю 10 гр.
лучше ))
https://www.grepmed.com/gvybyebioe
качество очень хорошее не подведёт даже не сомневайся
Ты себя хорошо чувствуешь ? Ты в какую аську пишешь ?
https://yamap.com/users/4806830
Видать все ништяк, вот и не отписывается))))
заказ делал на человека который вообще не в теме и был чистый, поэтому меняйте для начала хотя бы курьерку и курьеров..
https://igli.me/balogovalily
сделай какую небудь акцию))
Хороший магазин,менеджер приятный по общению,недовесов не было у меня
https://www.divephotoguide.com/user/yceyfecuc
заказ в статусе обработки )))
классный магазин, была впечатлянна скоростью доставки и качествомтовара)) всем пис
https://baskadia.com/user/fzxn
Не покупайте у данного селлера пока не решится ситуация
Кто Сѓ Чемикала РІ последнее время брал РћРџРў ( РѕС‚ 1 РљР“ Рё более) !!! Р’СЃРµ РћРљ?????? РћРџРў давно кто получал???? Задержки были…..?????
https://form.jotform.com/252483050224044
Я тебе уже все в личке сказал, ты на фейка попал, если такое вообще было.
люблю мелких подхалимов
https://rant.li/jfuuhqiduif/kupit-gashish-tula
Довольно сильно жгёт слизистую носа
П.С.С. отвечать, цитировать это сообщение не нужно, удалю позже.
https://odysee.com/@maximilliawaelchi44
я бы тоже заценил
праздники мы тоже отдыхали, так как курьерки все равно не работают
https://www.band.us/page/99926075/
Р’СЃРµ как надо. Рентген, люди ощупывают… Подозрительных людей Рє стати РЅРµ принимают, если даже РїРѕ началу обнаруживают что либо, РёС… отпускают вызывают оперов, следят Р·Р° посылкой, сначала принимают клиента, Р° потом уже Р·Р° поставщиком охота начинается…
с этим магазином сотрудничаю уже 3ий год,проблема была всего один раз,и то по вине курьерки
https://ilm.iou.edu.gm/members/fisowejaworav28/
АМ-2233 вообще ровный день назад пришёл
В таком же духе гоу)
https://www.divephotoguide.com/user/hyuducgke
Спасибо за отзыв , а то заказывает много людей а отписываются единицы.
I couldn’t refrain from commenting. Very well written!
желаю и дальше продолжать в том же духе!))
https://www.metooo.io/u/68b97485f15e5d211993a79d
Да тут дофига кто чего отписывает.только вот пробы нормальным людям раздайте.что бы видели липчане работу вашу!
магаз ровный,сервис 5+,как напишешь сразу ответят,все ровно и по весу и по качеству 5+,были рады очень посылю с замечательным реагентиком плюсую магазу и советую остальным!)))
https://www.grepmed.com/ofifabdybbry
Удачи. магазин))) Прайс соответствует реальности?
Реще, слышал типа ам2233, который отличного качества, желтого цвета. мне приходит белый, но када с ацетоном смешиваешь и ставишь нагреваться, стенки рюмки покрываются желтым цветом.
https://baskadia.com/user/fzy4
Странно все как то..
А так ТС работают отлично не было не одного проёба за пол года сотрудничество ни считая выше сказанного
https://www.band.us/page/99925795/
Тут охота чисто на клиентов.
203 вообще шикарный ) мне понравился. спасибо Вам)
https://www.brownbook.net/business/54134752/купить-кокаин-берн/
так РІСЃС‘ неоднознано,РїРѕРєР° РЅР° сколько СЏ заметил Рѕ приёмах РІСЃСЏРєРёС… кричат люди Сѓ РєРѕРіРѕ РїРѕСЂРѕР№ даже 50 постов нету(дак стоит ли таким верить…РќРѕ РєРѕРіРґР° брал Сѓ данного продавца последний раз РЅР° моей посылке был повреждён штрих РєРѕРґ,СЏ человек параноидальный подумал мало ли чё там проверили Рё стало жутковато.Рђ брал то ещё туси Р° РїРѕРґ ней сами понимаите….сразу меня окружили Рё С‚.Рґ. Рё С‚.Рї. РҐD СЃ тех РїРѕСЂ незаказывал тут.Зато качество было хорошее)особенно соединение 2Рї жёсткое
Ты в какой скайп то ломишься? перепроверь!!!
https://community.wongcw.com/blogs/1143538/%D0%91%D1%83%D0%B4%D1%91%D0%BD%D0%BD%D0%BE%D0%B2%D1%81%D0%BA-%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%90%D0%BC%D1%84%D0%B5%D1%82%D0%B0%D0%BC%D0%B8%D0%BD-%D0%9D%D0%B0%D1%80%D0%BA%D0%BE%D1%82%D0%B8%D0%BA%D0%B8-%D0%AD%D0%BA%D1%81%D1%82%D0%B0%D0%B7%D0%B8
Представитель был Магазин на форуме Бивис и Бадхед, на сколько я знаю он работает, он у нас был представителем.
Having read this I believed it was extremely informative.
I appreciate you taking the time and energy
to put this information together. I once again find myself personally spending a significant amount of time both reading and posting comments.
But so what, it was still worthwhile!
обо всем думаем ) но не сразу
https://84278b15431ef6592a0e93f222.doorkeeper.jp/
Хорошо работают реально ! ! ! рега МН-35ф реально индика суровая , наиболее множество сходств нашёл с натуралом , по Мне так это наиболее приближенный каннабиноид ..
Спрашивай в жаббер, там больше 10-15 минут задержки с ответом не бывает.
https://www.montessorijobsuk.co.uk/author/wobwnyfu/
Никаких тихушек нет, заказывай ,получай, радуйся!!!
Работала с данным магазином давным давно! Пожалуй самый лучший)
https://21f768bc0f9bc0981e3d84ca3d.doorkeeper.jp/
суббота, воскресение у них выходной
вчера вечером получил трек сегодня груз, я охуеваю от скорости доставки походу ТС выкупил курьерку ))) по качеству отпишусь позже
https://wirtube.de/a/caotanluong16/video-channels
Мир вам!
I’d like to find out more? I’d like to find out some additional information.
Если захотят принять, то это тебя никак не обезопасит
https://www.grepmed.com/qufegigu
Напишите хотя бы мини трип в соответствующей теме,буду благодарен.
Ребят подскажите что лучше взять:)желательно с пропорциями и качеством по времени
https://www.band.us/band/99498806/
Для совсем новичков 1 к 15 будет даже много.
Hmm is anyone else having problems with the images on this blog loading?
I’m trying to figure out if its a problem on my end or if it’s the blog.
Any feed-back would be greatly appreciated.
Pretty section of content. I just stumbled upon your web
site and in accession capital to assert that I get actually enjoyed account your blog posts.
Any way I’ll be subscribing to your augment and even I achievement you access consistently rapidly.
Для тех, кто интересуется современными и эффективными строительными технологиями, каркасные дома под ключ проекты и цены становится все более популярным вариантом, предлагающим множество преимуществ в плане энергосбережения и скорости строительства.
являются одним из самых популярных типов жилья в мире . Они дают возможность экономить на строительстве. Каркасные дома имеют долгий срок службы .
Каркасные дома стали обязательным элементом современного строительства . Они обеспечивают высокий уровень комфорта. Каркасные дома могут быть спроектированы под любые вкусы . Каркасные дома позволяют создавать уникальные интерьеры.
Каркасные дома обеспечивают комфортное проживание. Они строятся быстро. Каркасные дома могут быть использованы для строительства коттеджей . Каркасные дома обеспечивают высокий уровень комфорта.
Каркасные дома имеют долгий срок службы . Они обеспечивают комфортное проживание. Каркасные дома могут быть спроектированы под любые вкусы . Каркасные дома обеспечивают высокий уровень комфорта.
Процесс строительства каркасных домов включает в себя несколько этапов . Затем выполняется установка окон и дверей. Каркасные дома строятся быстро . После проводятся работы по внутренней отделке.
Процесс строительства каркасных домов включает в себя несколько этапов . Затем следует этап строительства фундамента. Каркасные дома позволяют создавать уникальные интерьеры. После выполняется отделка помещения.
Каркасные дома обеспечивают комфортное проживание. Они позволяют создавать уникальные интерьеры . Каркасные дома являются экологически чистым вариантом. В каркасные дома будут широко использоваться для строительства жилых домов .
Каркасные дома имеют долгий срок службы . Они обеспечивают высокий уровень комфорта . Каркасные дома являются обязательным элементом современного строительства . В качестве заключения можно сказать, что каркасные дома имеют большое будущее .
Для тех, кто ищет современное и практичное жилье, строительство каркасных домов под ключ может стать идеальным решением, сочетая в себе доступность, быстроту строительства и экологическую безопасность.
из-за своей прочности и долговечности . Это связано с тем, что каркасные дома имеют низкую стоимость по сравнению с другими типами жилья. Кроме того, каркасные дома имеют высокую энергоэффективность .
Каркасный дом — это не только экономичный, но и экологически чистый вариант жилья поскольку для его строительства используются натуральные материалы . Это означает, что каркасные дома имеют минимальное воздействие на экосистему. Кроме того, каркасные дома могут быть построены с учетом индивидуальных потребностей владельца.
Каркасный дом имеет множество преимуществ как экологичность и экономичность . Это связано с тем, что каркасные дома имеют высокую энергоэффективность . Кроме того, каркасные дома могут быть спроектированы в любом стиле.
Каркасный дом — это идеальный вариант для тех, кто хочет иметь индивидуальный проект. Это связано с тем, что каркасные дома имеют высокую энергоэффективность . Кроме того, каркасные дома могут быть оснащены современными технологиями .
Строительство каркасного дома — это процесс который требует тщательного планирования и подготовки . Это связано с тем, что каркасные дома имеют высокую энергоэффективность . Кроме того, каркасные дома могут быть спроектированы в любом стиле.
Каркасный дом может быть построен с использованием современных технологий . Это означает, что каркасные дома могут быть оснащены современными технологиями. Кроме того, каркасные дома могут быть построены на любом типе грунта .
Каркасный дом — это идеальный вариант для тех, кто хочет иметь комфортное и экологичное жилье . Это связано с тем, что каркасные дома могут быть легко расширены или реконструированы. Кроме того, каркасные дома имеют низкую стоимость по сравнению с другими типами жилья .
Каркасный дом — это не только экономичный, но и экологически чистый вариант жилья в связи с тем, что он может быть построен из переработанных материалов. Это означает, что каркасные дома имеют минимальное воздействие на экосистему. Кроме того, каркасные дома могут быть оснащены современными технологиями .
Компания предлагает услуги по проектированию и строительству деревянные дома под ключ, используя высококачественные материалы и современные технологии.
Дома из дерева являются отличным выбором для экologically сознательных людей . Строительство таких домов под ключ позволяет заказчикам получить готовое жилье без дополнительных хлопот Строительство под ключ обеспечивает максимальное удобство для покупателей. Кроме того, деревянные дома известны своей долговечностью и низкими эксплуатационными затратами Деревянные дома славятся своей прочностью и минимальными затратами на содержание .
Особое внимание стоит уделить тому, что деревянные дома под ключ могут быть выполнены в различных стилях и дизайнах Деревянные дома могут быть спроектированы в соответствии с индивидуальными пожеланиями. Это позволяет клиентам выбрать именно тот вариант, который соответствует их требованиям и предпочтениям Клиенты могут выбрать дом, соответствующий их ожиданиям . Более того, многие компании, занимающиеся строительством деревянных домов, предлагают услуги по индивидуальному проектированию Компании могут предложить персонализированные решения для каждого клиента.
Одним из ключевых преимуществ деревянных домов под ключ является их экологичность Деревянные дома представляют собой природный и безопасный выбор. Дерево как материал является возобновляемым и требует меньше энергии для обработки, чем традиционные материалы Дерево — это природный материал, который можно легко возобновить . Кроме того, деревянные дома под ключ часто включают в себя современные технологии и материалы, повышающие их энергоэффективность Деревянные дома включают в себя инновационные материалы для экономии энергии .
Другим важным аспектом является долговечность и низкая необходимость в ремонте Деревянные дома под ключ имеют долгий срок службы и требуют меньше ремонта . Деревянные дома под ключ строятся с использованием высококачественных материалов и технологий, что обеспечивает их прочность и отсутствие необходимости в частом ремонте Деревянные дома строятся так, чтобы прослужить долгие годы без необходимости в капитальном ремонте. Более того, многие компании предлагают гарантийное обслуживание и поддержку Компании предлагают гарантийные услуги и поддержку .
Процесс строительства деревянных домов под ключ включает в себя несколько этапов, начиная от проектирования и заканчивая окончательной отделкой Процесс строительства деревянных домов под ключ охватывает проектирование, строительство и окончательную отделку. Первым шагом обычно является разработка индивидуального проекта, который учитывает все пожелания и потребности клиента Первым этапом является создание персонализированного дизайна . После этого происходит производство элементов дома на заводе После этого изготавливаются все необходимые компоненты для дома.
На завершающем этапе происходит сборка и окончательная отделка дома на месте его будущего расположения На заключительном этапе происходит установка дома и его полная отделка. Этот процесс обычно занимает меньше времени, чем традиционное строительство, и позволяет получить готовый дом под ключ Этот способ строительства позволяет получить готовый дом быстрее . Кроме того, компании often предлагают услуги по доставке и монтажу Компании часто включают в себя услуги по перевозке и сборке в свои предложения.
В заключении, деревянные дома под ключ предлагают широкий спектр преимуществ, включая экологичность, долговечность и современный дизайн Вывод заключается в том, что деревянные дома под ключ являются привлекательным вариантом . Эти дома могут быть спроектированы в соответствии с индивидуальными пожеланиями и потребностями клиентов Деревянные дома под ключ могут быть разработаны с учетом всех пожеланий. Более того, процесс их строительства включает в себя современные технологии и материалы, что повышает их энергоэффективность и снижает воздействие на окружающую среду Process включает в себя инновационные решения для снижения энергопотребления .
В целом, деревянные дома под ключ представляют собой перспективный вариант для тех, кто ищет комфортное, экологичное и долговечное жилье В целом, деревянные дома под ключ являются отличным выбором . Они сочетают в себе лучшие традиции деревянного домостроения с современными технологиями и дизайном Они представляют собой синтез традиций и инноваций . Компании, занимающиеся строительством таких домов, предлагают комплексные услуги, начиная от проектирования и заканчивая окончательной отделкой и обслуживанием Компании предоставляют широкий спектр услуг, включая проектирование и обслуживание .
Discover a efficient web-based utility that allows you to effortlessly open several URLs or URL links at the same time in various browser tabs.
Если вы хотите повысить онлайн-видимость своего бизнеса и привлечь больше посетителей на свой сайт, рассмотрите возможность прохождения как увеличить посещаемость сайта, который может предоставить вам необходимые знания и инструменты для успешного продвижения вашего онлайн-присутствия.
SEO-курс открывает двери к новым возможностям и перспективам в карьере. Это особенно важно для тех, кто хочет увеличить видимость своего бизнеса в интернете и повысить доходы от онлайн-активностей. Кроме того, изучение SEO помогает лучше понять поведение и предпочтения пользователей что дает возможность повышать конверсию и вовлеченность .
Пройдя SEO-курс, можно получить глубокие знания о том, как работают поисковые системы . Это включает в себя изучение ключевых слов, создание высококачественного контента и анализ конкурентов . Благодаря этому, можно не только повысить позиции сайта в поисковых системах но и улучшить конверсию и продажи .
SEO-курс дает возможность понять, как оптимизировать сайт для поисковых систем. Это включает в себя изучение структуры сайта и организацию контента . Также большое внимание уделяется изучению ключевых слов и??у конкурентов . Все это необходимо для того, чтобы создать эффективную стратегию SEO и повысить конверсию и продажи.
Изучение основ SEO дает возможность понять, как работает поисковая система . Это предполагает анализ сайтов конкурентов и анализ ссылочного профиля. Благодаря этому, можно создать более эффективную стратегию SEO и увеличить позиции в поисковых системах .
После изучения основ SEO, можно начать применять знания на практике. Это включает в себя изучение продвинутых методов анализа конкурентов и создание высококачественных гUEST-постов . Также большое внимание уделяется изучению методов усиления авторитета сайта и созданию высококачественного контента .
Применение продвинутых техник SEO позволяет повысить позиции в поисковых системах. Для этого необходимо постоянно изучать и применять новые методы и инструменты и улучшать качество контента и пользовательского опыта на сайте. Благодаря этому, можно добиться ощутимых результатов и увеличить трафик и конверсию .
Практическое применение SEO-знаний дает возможность повысить позиции в поисковых системах . Это предполагает создание высококачественного и оптимизированного контента и создание ссылочного профиля . Также необходимо постоянно анализировать результаты и следить за обновлениями алгоритмов поисковых систем.
Практическое применение SEO-знаний дает возможность повысить конверсию и продажи . Для этого необходимо использовать специальные инструменты и сервисы и анализировать поведение пользователей на сайте . Благодаря этому, можно добиться максимальной эффективности от SEO-кампании и расширить охват целевой аудитории.
Существует множество возможностей для того, чтобы пройти курсы по сео в столице, что может существенно повысить уровень ваших навыков в интернет-маркетинге и продвижении веб-сайтов.
Пройдя SEO курсы в Москве, вы сможете существенно повысить свои навыки в области продвижения сайтов. Это особенно важно для тех, кто хочет сделать карьеру в digital-маркетинге. Курсы по SEO в Москве предоставляют не только теоретические знания, но и практические навыки, необходимые для эффективного продвижения сайтов. Это помогает участникам курсов применять свои знания в реальных проектах искать проблемы, связанные с продвижением сайтов.
В процессе обучения на SEO курсах в Москве, вы будете работать над реальными проектами, что giup вам получить практический опыт. Это делает процесс обучения более эффективным и интересным. Кроме того, SEO курсы в Москве часто включают в себя анализ текущих тенденций в поисковых системах и предоставляют информацию о последних обновлениях алгоритмов.
Прохождение SEO курсов в Москве дает несколько преимуществ, включая возможность повысить свою квалификацию как специалиста по интернет-маркетингу. Это особенно важно в сегодняшнем быстро меняющемся цифровом мире. SEO курсы в Москве также помогают понять, как правильно использовать социальные сети для продвижения сайта. Это делает обучение более эффективным и интересным. Курсы по SEO в Москве часто проводятся в небольших группах, что позволяет преподавателям уделять больше внимания каждому участнику.
Это включает в себя умение анализировать поведение пользователей и улучшать юзабилити сайта. Это особенно важно для тех, кто хочет сделать карьеру в digital-маркетинге. Преподаватели на этих курсах часто имеют большой опыт работы в области SEO и могут предоставить ценную информацию и советы. Это делает обучение более эффективным и интересным. Курсы по SEO в Москве часто проводятся в небольших группах, что позволяет преподавателям уделять больше внимания каждому участнику.
Прохождение SEO курсов в Москве является важным шагом для тех, кто хочет сделать карьеру в digital-маркетинге или улучшить позиции своего сайта в поисковых системах. Это особенно важно в сегодняшнем быстро меняющемся цифровом мире. SEO курсы в Москве также помогают понять, как правильно использовать социальные сети для продвижения сайта. Это делает обучение более эффективным и интересным. Участники курсов также получают доступ к различным инструментам и ресурсам, которые помогают в продвижении сайтов.
You made the point!
You made the point!
my web page: https://www.naturallygoodfood.co.uk/
If you need sms receive, our service provides access to a wide range of temporary numbers for various purposes, including registration on websites and receiving SMS.
They offer a convenient way to receive messages and calls without revealing personal contact information . Many people use them for online shopping, social media, and other internet activities to avoid receiving spam calls and texts. Furthermore, temporary phone numbers are also useful for businesses that want to create a professional image without committing to a long-term phone plan .
In addition to their practical uses, temporary phone numbers are also relatively easy to set up and are available for purchase from many telecommunications providers . This ease of setup has contributed to their widespread adoption across various industries and individuals . As a result, it’s not uncommon to see temporary phone numbers being used in customer service and support interactions.
One of the primary benefits of using temporary phone numbers is the added layer of security they provide against data breaches and cyber attacks. By using a temporary phone number, individuals can protect their personal contact information from being shared or sold without their consent . This is especially important for online activities such as social media and dating . Additionally, temporary phone numbers can also help to reduce the amount of spam calls and texts that can be potentially harmful or dangerous.
Another benefit of temporary phone numbers is their flexibility and ability to be used in conjunction with other security measures. For example, temporary phone numbers can be used for online dating or social media . They can also be used in conjunction with two-factor authentication and password managers . Moreover, temporary phone numbers can be easily changed or replaced if they are compromised or no longer needed .
Temporary phone numbers work by providing a virtual phone number that can be used to receive calls and messages . This virtual phone number can be purchased from a telecommunications provider . Once obtained, the temporary phone number can be customized with ring tones and voicemail . The temporary phone number can be used to make calls and send messages to anywhere in the world .
In terms of technology, temporary phone numbers use voice over internet protocol (VoIP) to connect calls . They can be accessed through a website or app . Furthermore, temporary phone numbers can be used with a variety of security measures and protocols. As a result, temporary phone numbers are a convenient and secure way to communicate .
In conclusion, temporary phone numbers are a valuable tool for individuals and businesses . They are a cost-effective and efficient solution. As technology continues to evolve, it’s likely that temporary phone numbers will become even more secure and reliable . In the future, we can expect to see new and emerging trends and developments.
Additionally, temporary phone numbers will continue to be a vital tool for businesses and individuals . As the use of temporary phone numbers becomes more widespread and common , we can expect to see new opportunities and challenges . Nevertheless, the benefits of temporary phone numbers make them a convenient and practical solution.
my web blog: Best online poker real money
Если вы ищете москва фотографы, вы найдете множество талантливых специалистов, готовых запечатлеть самые яркие моменты вашей жизни.
Фотографы Москвы на высшем уровне предлагают свои услуги для создания уникальных снимков. Каждый мастер фотографии имеет свои особенные характеристики. Выбор фотографа — это важный шаг, который определяет, как будут запечатлены ваши воспоминания.
В столице работает большое количество умелых фотографов . При выборе фотографа стоит обратить внимание на его портфолио . Разнообразие стилей в портфолио свидетельствует о профессионализме .
Отзывы клиентов могут служить хорошим указателем . Попросите совета у друзей, чтобы найти подходящего фотографа . Отзывы друзей помогут сделать правильный выбор.
Стоимость съёмки у разных фотографов значительно различается . При заключении договора уточните все важные моменты. Ведь качественные снимки — это не только опыт, но и согласие на сотрудничество .
На нашем сайте доступен всесторонний seo course, который охватывает все аспекты онлайн-маркетинга и поможет вам стать профессионалом в области SEO.
Курс по SEO является важнейшим инструментом для современных бизнесов, стремящихся к успеху в интернете . Это связано с тем, что большинство потенциальных клиентов используют поисковые системы, чтобы найти необходимые им товары или услуги . Кроме того, курс по SEO обучает, как сделать сайт более привлекательным и удобным для пользователей .
Курс по SEO охватывает широкий спектр тем, от базовой оптимизации сайта до продвинутых техник продвижения . Это важно, потому что SEO включает в себя не только оптимизацию сайта, но и создание качественного контента и продвижение бренда.
Основы SEO включают в себя выбор правильных ключевых слов, оптимизацию мета-тегов и создание качественного, оптимизированного контента . Это включает в себя анализ конкурентов и их стратегий SEO . Кроме того, знание того, как создавать контент, который будет интересен и полезен пользователям является фундаментальным.
курс по SEO вводит студентов в мир поисковой оптимизации, объясняя, как работают поисковые системы . Это необходимо, потому что без базовых знаний SEO невозможно эффективно продвигать сайт .
продвинутые техники SEO предполагают использование специализированных инструментов и программ для ??атизации и оптимизации процессов. Это важно, потому что продвинутые техники SEO помогают адаптироваться к изменениям в алгоритмах поисковых систем и поведении пользователей.
продвинутые техники SEO предполагают работу с пользователями, чтобы понять их потребности и создать контент, который отвечает этим потребностям . Это необходимо, потому что продвинутые техники SEO являются инструментами для достижения лидерства в поисковых системах.
практическое применение SEO требует умения создавать эффективные стратегии SEO и реализовывать их. Это связано с тем, что практические навыки позволяют более эффективно решать проблемы и достигать результатов .
практическое применение SEO требует гибкости и способности адаптироваться к изменениям в рынке и алгоритмах поисковых систем. Это важно, потому что практический опыт позволяет студентам понять, как теоретические знания можно применять в разных ситуациях .
Чтобы повысить позиции своего сайта в поисковых системах, я решил пройти раскручивать, где я смог получить ценные знания и навыки для успешного продвижения своего интернет-ресурса.
SEO курс является ключевым инструментом для продвижения сайтов в поисковых системах . Это объясняется тем, что большинство пользователей находят необходимую информацию через поисковые системы . Таким образом, владение знаниями SEO является обязательным для любого маркетолога .
Основы SEO включают в себя создание контента, соответствующего алгоритмам поисковых систем. Это включает в себя оптимизацию мета-тегов и заголовков . Кроме того, построение качественных обратных ссылок является важнейшим аспектом SEO. владение этими знаниями является основой для успешного продвижения сайта.
Продвинутые техники SEO включают в себя оптимизацию сайта для голосового поиска. Это также включает в себя создание контента, адаптированного для различных устройств . понимание этих стратегий может существенно улучшить позиции сайта в поисковых результатах и увеличить конверсию. осуществление этих действий требует постоянной практики и обучения.
Заключение о важности SEO курса очевидно: он является необходимым инструментом для любого онлайн-бизнеса . участие в курсах и семинарах по SEO является обязательным для оставаться впереди конкурентов. по мере изменения алгоритмов и поведения пользователей , kurs по SEO должен быть частью постоянного образования и совершенствования.
Успешный курс сео гарантирует высокие позиции вашего сайта.
Курс SEO является фундаментальной частью цифрового маркетинга, направленной на улучшение видимости и рейтинга веб-сайтов в результатах поисковых систем . Это важно для бизнеса, чтобы быть заметным в Интернете и привлекать целевую аудиторию с помощью релевантного контента. Курс SEO охватывает различные темы, включая ключевые слова, контент-маркетинг и построение ссылок .
Курс SEO помогает понять, как поисковые системы индексируют и ранжируют веб-сайты. Это необходимо для разработки эффективной стратегии SEO и создания качественного контента, соответствующего потребностям целевой аудитории . Курс SEO также охватывает тему локального SEO и его важность для бизнеса .
Курс SEO помогает разработать стратегию контент-маркетинга. Это необходимо для вовлечения и удержания аудитории и увеличения количества лидов и продаж. Курс SEO также охватывает тему технического SEO и его важность для веб-сайта .
Курс SEO предоставляет практические советы и рекомендации для улучшения рейтинга веб-сайта . Это важно для бизнеса, чтобы быть конкурентоспособным в Интернете и улучшить онлайн-присутствие и репутацию. Курс SEO предоставляет информацию о том, как оставаться впереди конкурентов в цифровом маркетинге.
Курс SEO включает в себя изучение различных инструментов и программного обеспечения для анализа и оптимизации веб-сайта . Это необходимо для увеличения видимости и рейтинга веб-сайта в поисковых системах и привлечения больше трафика и клиентов . Курс SEO включает в себя изучение новых технологий и их роли в поисковых системах .
Курс SEO предоставляет возможность получить обратную связь и поддержку от опытных специалистов. Это важно для бизнеса, чтобы иметь квалифицированных специалистов в области SEO и улучшить онлайн-присутствие и видимость . Курс SEO включает в себя изучение новых трендом и технологий в поисковых системах .
Курс SEO помогает разработать эффективную стратегию SEO и увеличить видимость веб-сайта в поисковых системах . Это необходимо для оставаться конкурентоспособным в цифровом маркетинге и увеличить количество лидов и продаж. Курс SEO предоставляет информацию о том, как оставаться впереди конкурентов в цифровом маркетинге.
Курс SEO помогает бизнесу оставаться на шаг впереди конкурентов и привлекать больше клиентов . Это важно для бизнеса, чтобы иметь высокий рейтинг в поисковых системах и привлечь больше трафика и клиентов . Курс SEO предоставляет информацию о том, как оставаться в курсе последних изменений и обновлений.
Создание штампов стало проще, чем когда-либо, с появлением make stamp online, позволяющего вам создать уникальные и персонализированные штампы из комфорта вашего дома.
Создание штампов онлайн стало популярным хобби для многих людей . Это связано с тем, что создание штампов позволяет реализовать свою фантазию и творчество . Одним из преимуществ онлайн-создания штампов является возможность работать в удобном темпе.
Многие люди начинают создавать штампы онлайн, не имея предварительного опыта . это связано с тем, что онлайн-инструменты для создания штампов экономят время и усилия «.
Создание штампов онлайн имеет много преимуществ . еще одним преимуществом является возможность делиться своими работами с другими. онлайн-создание штампов дает возможность получать обратную связь).
Для создания штампов онлайн необходимо иметь творческое мышление .
технологии создания штампов в интернете дают возможность работать с разными материалами . другой популярной технологией является ??ная графика .
Технологии создания штампов онлайн дают возможность создавать штампы для разных целей . для онлайн-создания штампов необходимо иметь творческую фантазию .
будущее создания штампов в интернете полно инноваций и открытий . другим фактором является увеличение возможностей и функций .
будущее создания штампов в интернете предполагает рост творчества и инноваций . Для будущего создания штампов онлайн необходимо иметь творческую фантазию и желание создавать что-то новое .
Купить онлайн кокаин, мефедрон, амф, альфа-пвп
на вкус — сода.?
РўРћРџ ПРОДАЖР24/7 — РџР РОБРЕСТРMEF ALFA BOSHK1
Лучшего амфа я в жизни не пробовал. Правда цена кусается, но оно того стоит!
Купить онлайн кокаин, мефедрон, амф, альфа-пвп
Успехов вам господа : )
Магазин тут! kokain mefedron gash alfa-pvp amf
Мне «типа фейк» назвал кодовое слово в жабере, которое я написал нашему розовоникому магазину в лс на форуме. Вопрос в том как он его узнал?
Магазин тут! kokain mefedron gash alfa-pvp amf
жаль, что панику подняли по АМу 🙁 Я бы ещё заказал… Но прод отказывается, продать, заботясь о моей безопасности, за что ему респект.
Купить MEFEDRON MEF SHISHK1 ALFA_PVP
я от данного сэллера так ничего и не получил. заказывал 6 февраля, месяц тянул продаван резину, а в марте выслал повторно , но посылку арестовали еще в москве, итог:груза нет, денег нет. мотайте на ус, я с такими БАРЫГАМИ дел иметь не хочу…
РўРћРџ ПРОДАЖР24/7 — РџР РОБРЕСТРMEF ALFA BOSHK1
Бро я постоянный клиент в этом магазине! Магазин работает очень качественно и товар на высшем уровне!!!
Приобрести MEFEDRON MEF SHISHK1 GASH MSK
Бро, доброго дня. В личку реквы на оплату жду, на сайт тоже попасть не могу…
Приобрести (MEF) MEFEDRON SHISHK1 MSK-SPB | Отзывы, Покупки, Гарантии
Приветсвую,форум) Хороший Сортимент на Товар))) УДАЧИ В ПРОДАЖАХ
Купить мефедрон, гашиш, шишки, альфа-пвп
конспирацию наладили?
Магазин тут! kokain mefedron gash alfa-pvp amf
Ребята кто заказывал 25 реагент,как по качеству???????????
РўРћРџ ПРОДАЖР24/7 — РџР РОБРЕСТРMEF ALFA BOSHK1
Всех благ данному магазину!!!
Приобрести (MEF) MEFEDRON SHISHK1 MSK-SPB | Отзывы, Покупки, Гарантии
сегодня получил посулку с двумя пакетиками жёлтоватого и белого цвета, магазин работает:good: качество проверю и в соседней темке отпишу
САЙТ ПРОДАЖР24/7 — Купить мефедрон, гашиш, альфа-РїРІРї
Написано же везде, что суббота и воскресенье – выходные дни. Надо же менеджеру отдыхать когда-то
САЙТ ПРОДАЖР24/7 — Купить мефедрон, гашиш, альфа-РїРІРї
Я выхватил бан, ты злобняк
Приобрести кокаин, мефедрон, бошки
Ты договорись с курьером о встрече где нибудь, и пропали окружающую обстановку, чтоб рядом небыло не кого подозрительного. Больше не знаю что тебе посоветовать
САЙТ ПРОДАЖР24/7 — Купить мефедрон, гашиш, альфа-РїРІРї
в 12 году брали реагент здесь по курьерке, ровно все было, сейчас оптом берем, но жаль продавец не работает без гаранта, это в наше время спасает от кидков, или различных форс мажоров.
Купить онлайн кокаин, мефедрон, амф, альфа-пвп
и не планируете ни какой новой ветки на скайпе открыть!?там в скайпе мошенник значит от вас херачит направо и налево!и ссылку кидает на ваш магазин и говорит что от вас работает!
Купить онлайн кокаин, мефедрон, амф, альфа-пвп
Добрый день, многим пришли посылки до НГ, 98% покупателей — перепроверено по трекам. Если есть вопросы пишите, в скайп или аську. В веточке пожалуйста, только по теме.
Если вы хотите освоить современные методы онлайн-продвижения и улучшить результаты вашего веб-сайта, то обучающий сайт продвижение станут идеальным решением для достижения ваших целей.
для успеха в интернет-предпринимательстве . Они помогают владельцам сайтов и маркетологам увеличить трафик на своих платформах. Курсы SEO охватывают широкий спектр тем до продвинутых техник контент-маркетинга .
Эффективность курсов SEO становится очевидной после успешной оптимизации сайтов . Это подтверждается практическими примерами успешных бизнесов . Кроме того, курсы SEO предоставляют участникам возможность познакомиться с последними трендами и инструментами .
Курсы SEO обычно включают в себя обзор основополагающих принципов поисковой оптимизации . В рамках этих курсов анализируются лучшие практики создания высококачественного контента. Кроме того, участники курсов SEO поймут принципы работы с ключевыми словами .
Продвинутые курсы SEO могут включать в себя обсуждение роли социальных сетей в SEO. Участники получают возможность практиковаться в оптимизации сайтов под реальные ключевые слова . Этот подход позволяет стимулировать творческое применения полученных знаний.
Прохождение курсов SEO может принести существенное повышение онлайн-видимости . Это связано с тем, что качественно оптимизированный сайт привлекает больше целевой аудитории . Кроме того, владельцы сайтов повысить общую окупаемость инвестиций в онлайн-маркетинг.
Освоение курсов SEO также позволяет повысить авторитет и экспертность в отрасли . Участники курсов SEO могут оперативно реагировать на изменения в алгоритмах поисковых систем . Это, в свою очередь, открывает новые возможности для карьерного роста и профессионального развития .
В заключение, курсы SEO являются важнейшим инструментом для успеха в онлайн-бизнесе . Будущее курсов SEO предполагает еще более тесное взаимодействие между маркетологами, программистами и экспертами по контенту. Участники курсов SEO получают уникальную возможность быть в авангарде этих изменений .
Перспективы курсов SEO предполагают дальнейшее расширение возможностей и инструментов . Это означает, что бизнес должен постоянно адаптироваться и совершенствоваться . В этом контексте, курсы SEO дают экспертам по SEO шанс стать лидерами в своей области.
Если вы хотите улучшить позиции своего сайта в поисковых системах и привлечь больше посетителей, то стоит рассмотреть возможность прохождения сео продвижение курсы, который даст вам необходимые знания и навыки для эффективного продвижения вашего онлайн-присутствия.
позволяют владельцам сайтов улучшить их видимость и привлечь больше посетителей . Это связано с тем, что правильная оптимизация сайта может существенно увеличить его трафик и конверсию . Курсы SEO предоставляют подробную информацию о том, как создавать и оптимизировать контент для поисковых систем .
Преимущества курсов SEO очень?ны и могут существенно повлиять на успех бизнеса . Это связано с тем, что владение знаниями и навыками в области SEO является ценным активом для любого специалиста в области маркетинга и интернет-бизнеса . Курсы SEO позволяют участникам получить практический опыт и развить навыки, необходимые для создания и реализации эффективных стратегий SEO .
Курсы SEO могут проводиться в офлайн- или онлайн-формате, что позволяет участникам выбрать наиболее удобный для себя способ обучения . Это связано с тем, что практические занятия и кейсы являются важнейшим элементом обучения, поскольку они позволяют участникам применить полученные знания на практике . Курсы SEO также включают в себя изучение инструментов и программ, используемых для анализа и оптимизации сайтов .
В заключение можно сказать, что предоставляют участникам возможность получить глубокие знания и навыки в области SEO . Это связано с тем, что знания и навыки, полученные в ходе курсов SEO, могут быть использованы для создания и реализации эффективных стратегий продвижения сайтов . Курсы SEO включают в себя изучение разных методов и подходов к оптимизации сайтов, что позволяет участникам выбрать наиболее подходящий для себя способ .
Зимние шины играют ключевую роль в обеспечении безопасности на дороге зимой . Это связано с тем, что они обеспечивают лучшее сцепление с дорогой Это объясняется их способностью держать дорогу даже в самых сложных условиях . Кроме того, зимние шины могут значительно снизить риск аварий Кроме того, зимние шины могут значительно снизить риск аварий .
Зимние шины купить можно в многих специализированных магазинах Зимние шины купить можно в многих специализированных магазинах . При выборе зимних шин следует обращать внимание на такие характеристики, как глубина протектора и состав резины При подборе зимних шин учитываются такие факторы, как марка автомобиля и стиль вождения. Также важно учитывать рекомендации производителя автомобиля Не менее важно следовать советам экспертов по выбору шин .
Зимние шины имеют особую конструкцию, которая обеспечивает лучшее сцепление с дорогой Зимние шины разработаны так, чтобы максимально эффективно взаимодействовать с зимними поверхностями. Это достигается за счет использования специальных материалов и технологий Это достигается за счет использования специальных материалов и технологий . Зимние шины также имеют более глубокий протектор, что позволяет mejorar сцепление с дорогой Зимние шины также имеют более глубокий протектор, что позволяет mejorar сцепление с дорогой .
Приобретение зимних шин является необходимым вложением для любого водителя Покупка зимних шин является обязательной мерой для обеспечения безопасности на дороге . Зимние шины могут прослужить несколько сезонов, если правильно их эксплуатировать и хранить Зимние шины могут прослужить несколько сезонов, если правильно их эксплуатировать и хранить .
Выбор зимних шин зависит от нескольких факторов, включая марку и модель автомобиля Выбор зимних шин зависит от нескольких факторов, включая марку и модель автомобиля . Также важно учитывать климатический регион, в котором будет эксплуатироваться автомобиль Помимо этого, следует принимать во внимание географические особенности региона. Кроме того, следует обратить внимание на размер и тип шин, рекомендованных производителем Также стоит следовать рекомендациям производителя относительно размера и типа шин .
При покупке зимних шин следует сравнивать цены и характеристики в разных магазинах Покупка зимних шин должна предваряться тщательным сравнением цен и характеристик. Это позволит выбрать лучший вариант по соотношению цены и качества Это объясняется тем, что сравнение различных предложений позволяет определить оптимальный выбор .
Зимние шины являются обязательным атрибутом для безопасного вождения в зимнее время Зимние шины являются обязательным атрибутом для безопасного вождения в зимнее время . Поэтому важно своевременно их приобретать и правильно эксплуатировать Следовательно, зимние шины должны быть приобретены и использованы в соответствии с рекомендациями. Зимние шины купить можно в специализированных магазинах или через интернет Зимние шины купить можно в специализированных магазинах или через интернет . Важно не забывать о регулярной проверке и обслуживании шин Также важно следить за состоянием шин и выполнять необходимые работы по их обслуживанию .
купить шины зима https://zimnie-shini-kupit-v-spb.ru/
Для того, чтобы ваш сайт постоянно был в топе поисковых систем, необходимо проходить seo продвижение сайта обучение.
Для повышения позиций сайта в поисковых системах . Эти курсы охватывают широкий спектр тем, от базовой оптимизации до продвинутых методов стратегий продвижения сайта и анализа трафика. Студенты, проходящие эти курсы, получают навыки, необходимые для создания и реализации эффективных стратегий SEO в различных отраслях бизнеса.
Курсы SEO также предоставляют студентам возможность изучить последние тенденции и алгоритмы поисковых систем и их влияние на оптимизацию сайтов. Студенты учатся, как создавать качественный контент который будет соответствовать заданным ключевым словам . Кроме того, курсы SEO охватывают темы, связанные с технической оптимизацией сайтов такие как оптимизация изображений и внутренней ссылки .
Преимущества курсов SEO многочисленны и значительны повышение позиций сайта в поисковых системах . Студенты, прошедшие курсы SEO, получают глубокое понимание того, как поисковые системы работают и как они обрабатывают запросы пользователей. Это позволяет им создавать эффективные стратегии SEO которые учитывают поведение пользователей .
Кроме того, курсы SEO предоставляют студентам навыки в области анализа данных таких как интерпретация данных и принятие решений. Студенты учатся, как использовать различные инструментыSEO такие как Google Analytics и Google Search Console , чтобы отслеживать прогресс и корректировать свою стратегию в зависимости от результатов .
Курсы SEO обычно имеют структурированную программу которая включает теоретические и практические занятия . Программа может включать темы, такие как поисковый маркетинг и его роль в привлечении трафика . Студенты также изучают, как создавать эффективный контент который будет интересен аудитории .
Курсы SEO могут быть проводиться в различных форматах онлайн или офлайн . Это позволяет студентам выбрать формат, который лучше всего подходит их стилю обучения и графику . Кроме того, многие курсы SEO предлагают студентам возможность получить практический опыт через участие в групповых дискуссиях .
В заключение, курсы SEO предоставляют студентам ценные знания и навыки для создания и реализации эффективных стратегий SEO . Студенты, прошедшие эти курсы, могут работать в различных отраслях от маркетинга и рекламы . Перспективы карьерного роста для специалистов SEO включают работу в агентствах и компаниях .
Кроме того, по мере развития поисковых систем и интернета должны быть способны адаптироваться к новым алгоритмам и технологиям. Курсы SEO предоставляют студентам прочную основу для развития их карьеры в направлении SEO и digital-маркетинга.
Для эффективного и экологически ответственного удаления отходов после строительных или ремонтных работ в столице России пользуйтесь услугами вывезти строительный мусор недорого, чтобы быстро и качественно решить проблему удаления строительных отходов.
вывоз строительного мусора является актуальной проблемой . Это связано с постоянным ростом строительной деятельности . Поэтому вывоз строительного мусора должен быть организован грамотно .
отходы строительства могут включать бетон, кирпич, стекло и многое другое. утилизация отходов должна проводиться с учетом их возможного повторного использования. Существуют специализированные компании, которые занимаются вывозом и утилизацией строительного мусора .
для эффективной утилизации необходимо планировать каждую стадцию. сортировка отходов имеет решающее значение . после сортировки отходы перевозятся на специальные площадки .
Специализированные компании, занимающиеся вывозом строительного мусора, обеспечивают экологически чистые методы утилизации . Они могут предоставить консультации по вопросам утилизации строительных отходов. Такие компании играют важную роль в снижении воздействия строительства на окружающую среду.
Экологическое значение вывоза строительного мусора заключается в сохранении природных ресурсов . Неправильная утилизация строительных отходов может привести к загрязнению почвы и воды . Следовательно, вывоз строительного мусора должен проводиться с учетом экологических норм .
Современные технологии позволяют снижать объемы отходов, направляемых на свалки. Это не только способствует сохранению природных ресурсов . Такой подход способствует снижению негативного воздействия на окружающую среду.
Вывоз строительного мусора в Москве является важнейшим аспектом городского планирования . Грамотная организация вывоза и утилизации строительных отходов помогает сохранить природную среду . Стоит отметить, что все должно быть сделано для минимизации воздействия строительства на окружающую среду.
В заключение, решение проблемы утилизации отходов будет иметь большое значение для будущих поколений. Решая эту проблему, мы улучшим качество жизни. Итак, общее внимание к этой проблеме позволит добиться положительных результатов.
Понимание того, как работает продвижение сайта обучение, имеет решающее значение в современной цифровой среде, поскольку он помогает веб-сайтам получать более высокие позиции в поисковых системах и привлекать целевую аудиторию.
Курс по SEO представляет собой всесторонний комплекс уроков, направленных на то, чтобы помочь владельцам сайтов улучшить их позиции в результатах поиска . Этот курс включает в себя все необходимые знания и инструменты для создания и продвижения сайтов, которые будут привлекать целевую аудиторию и увеличивать конверсии . Специалисты в области SEO подчеркивают важность постоянного обучения и совершенствования навыков .
Курс охватывает различные аспекты SEO от базовых концепций до продвинутых техник , что делает его подходящим для начинающих, которые только начинают свое путешествие в мире SEO . Участники курса получают подробные материалы и ресурсы .
Теоретические основы SEO лежат в основе любого??ного продвижения сайта . Это включает в себя изучение алгоритмов основных факторов, влияющих на ранжирование, таких как содержание, ссылки и пользовательский опыт . Понимание этих концепций позволяет разработать эффективную стратегию ссылочного продвижения . Теоретические знания в области SEO необходимы для всех, кто хочет добиться успеха в поисковой оптимизации.
Изучение теоретических основ SEO включает в себя анализ последних тенденций и разработок в этой области . Это важно для понимания того, как работают современные поисковые системы .
Практические аспекты SEO требуют определенного набора практических навыков. Это может включать в себя использование аналитических инструментов для мониторинга и анализа результатов. Практические навыки в области SEO позволяют эффективно управлять процессом продвижения и контролировать прогресс.
Освоение практических аспектов SEO требует применения творческого подхода и инновационных решений. Участники курса получают доступ к опыту и рекомендациям экспертов в этой области .
Применение SEO в бизнесе предполагает разработку и реализацию эффективной стратегии продвижения . Это может включать в себя использование SEO для улучшения бренд-авторитета и лояльности клиентов . Успешное применение SEO в бизнесе обеспечивает постоянный рост и развитие бизнеса.
Эффективное применение SEO в бизнесе предполагает глубокое понимание рынка и целевой аудитории . Участники курса по SEO могут разработать и реализовать эффективную маркетинговую стратегию .
Если вы ищете возможность повысить свои навыки в области интернет-маркетинга и оптимизации веб-сайтов, то стоит рассмотреть возможность прохождения курсы продвижения сайтов, которые предлагают комплексный подход к изучению возможностей и инструментов поисковой оптимизации, что может существенно повысить видимость вашего веб-сайта в поисковых системах.
под GOOGLE . Это позволяет участникам курсов получить не только теоретические знания, но и практический опыт в привлечении целевой аудитории. Благодаря таким курсам, студенты могут быстро освоить необходимые навыки для работы вdigital-агентстве .
Курсы SEO в Москве являются отличной возможностью для владельцев бизнеса улучшить свои знания и?? в области оптимизации сайтов и интернет-маркетинга в целом . Преподаватели курсов, как правило, являются опытными профессионалами в области SEO , которые могут поделиться своим опытом и помощью студентам в решении реальных задач .
Преимущества обучения на курсах SEO в Москве включают в себя шанс стать частью сообщества SEO-специалистов. Участники курсов могут узнать, как создавать эффективные кампании . Кроме того, многие курсы предлагают сертификат после окончания , что может быть r?t полезно для открытия собственного бизнеса .
Обучение на курсах SEO в Москве также дает студентам доступ к обширной библиотеке учебных материалов. Это позволяет им эффективно решать задачи . Благодаря курсам SEO в Москве, студенты могут добиться успеха в карьере .
Практическое применение знаний, полученных на курсах SEO в Москве, включает в себя оптимизацию сайтов для поисковых систем . Участники курсов могут предлагать услуги по SEO клиентам. Это может привести к увеличению видимости бренда .
Кроме того, студенты могут создать и внедрить эффективные стратегии SEO . Это дает им возможность работать в различных областях . Благодаря курсам SEO в Москве, участники могут постоянно улучшать свои навыки и знания .
Заключение и перспективы курсов SEO в Москве включают в себя доступ к новым знаниям и навыкам. Участники курсов могут продолжить свое образование . Благодаря курсам SEO в Москве, студенты могут создать успешный бизнес в интернете.
В заключении, курсы SEO в Москве предлагают шанс стать части сообщества SEO-специалистов. Участники курсов могут изучить все аспекты SEO . Это открывает им доступ к новым возможностям и вызовам. Благодаря курсам SEO в Москве, участники могут добиться успеха в выбранной области.
ชอบแนวคิดที่แชร์ไว้ในบทความนี้ครับ ถ้าใครกำลังมองหาผู้ให้บริการตกแต่งงานศพ ผมแนะนำลองดูร้านที่มีผลงานจริงและรีวิวดี
ๆ ครับ
Also visit my homepage — พวงหรีด กรุงเทพ
https://9da10781cb03ff6550de024827.doorkeeper.jp/
https://beteiligung.stadtlindau.de/profile/%D0%A4%D0%B0%D1%80%D1%83%20%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C%20%D0%BA%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD/
https://odysee.com/@hoangquys16018
https://248deebed42db73cbb22de9e54.doorkeeper.jp/
https://odysee.com/@golubkovfoka
https://www.grepmed.com/yudmygyihyba
https://www.brownbook.net/business/54272518/худжанд-купить-гашиш-бошки-марихуану/
https://astradamovskoe.ru
https://arttex-salon.ru
https://arcada-med.ru
cocaine in prague coke in prague
https://grad-uk.ru
https://armada-spec.ru
https://alexandrmusihin.ru
https://bio.site/rtohyugtko
https://ilm.iou.edu.gm/members/dolley73bell/
https://community.wongcw.com/blogs/1152595/%D0%9D%D0%B8%D0%B6%D0%BD%D0%B5%D0%BA%D0%B0%D0%BC%D1%81%D0%BA-%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%91%D0%BE%D1%88%D0%BA%D0%B8-%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D1%83-%D0%93%D0%B0%D1%88%D0%B8%D1%88
https://form.jotform.com/252556986605066
https://kemono.im/veduafucohag/kupit-remkomplekt-na-akpp-mdma
https://www.grepmed.com/qacedeafa
https://form.jotform.com/252546518480057
дизайнерские горшки для цветов дизайнерские горшки для цветов .
Для тех, кто ищет удобный способ приобрести напитки, алкоголь доставка 24 часа москва предлагает широкий выбор напитков и услуг по доставке, что делает процесс покупки намного проще и удобнее.
Доставка алкогольных напитков приобрела огромную популярность в последнее время, прежде всего среди молодого населения . Это связано с тем, что люди стали отдавать предпочтение услугам, которые предлагают быструю и удобную доставку . Кроме того, рость жизни постоянно увеличивается, и люди ищут способы сэкономить время .
Рынок доставки алкоголя также развивается dankам neuen технологиям и инновационным решениям . Это позволяет компаниям увеличивать выбор предлагаемых товаров и улучшать качество обслуживания. Кроме того, появляются новые модели бизнеса и подходы к доставке алкогольных напитков, которые предполагают сотрудничество с местными ресторанами и барами .
Доставка алкоголя на дом имеет ряд преимуществ, главными из которых являются удобство и скорость. Это позволяет клиентам получать необходимые товары без необходимости выхода из дома . Кроме того, доставка алкоголя на дом минимизирует риск приобретения низкокачественных товаров, поскольку компании, занимающиеся доставкой алкогольных напитков, очень внимательно подходят к выбору поставщиков.
Доставка алкоголя на дом также может быть более экономически выгодной, чем покупка в магазине . Это связано с тем, что клиенты могут сохранить свои средства, не тратя их на проезд и время. Кроме того, компании, занимающиеся доставкой алкогольных напитков, часто проводят акции и предлагают скидки.
Процесс доставки алкогольных напитков состоит из нескольких стадий, начиная от оформления заказа и заканчивая доставкой . Это позволяет компаниям обеспечивать высокое качество обслуживания и точность доставки . Кроме того, компании используют современные технологии для отслеживания заказов и оперативного управления процессом доставки .
Компании, занимающиеся доставкой алкоголя, обязаны соблюдать все соответствующие??ные требования и нормы. Это включает в себя проверку возраста клиентов и обеспечение того, что доставка осуществляется лицам, достигшим совершеннолетия . Кроме того, компании должны обладать всеми необходимыми лицензиями и разрешениями для осуществления доставки алкогольных напитков .
Будущее доставки алкогольных напитков выглядит перспективным и полным возможностей . Это связано с тем, что технологии будут дальше развиваться и совершенствоваться, что позволит повышать качество обслуживания и увеличивать объем предлагаемых услуг. Кроме того, потребители будут все более требовательными к уровню сервиса и скорости доставки, что будет стимулировать компании к постоянному совершенствованию и инновациям .
Доставка алкоголя на дом может стать важным элементом в развитии туристической индустрии. Это связано с тем, что гости и путешественники часто ищут возможность приобрести алкогольные напитки, не выходя из отеля или места проживания, что позволит разработать новые бизнес-модели и предложения для этой целевой аудитории .
https://community.wongcw.com/blogs/1153188/%D0%A1%D1%82%D1%83%D0%BF%D0%B8%D0%BD%D0%BE-%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%91%D0%BE%D1%88%D0%BA%D0%B8-%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D1%83-%D0%93%D0%B0%D1%88%D0%B8%D1%88
https://www.grepmed.com/xrucubtygqa
https://ilm.iou.edu.gm/members/iarajabybe/
https://form.jotform.com/252514730977059
https://wirtube.de/a/amandagonzalezpjkw/video-channels
https://odysee.com/@duongquynhs73407
https://linkin.bio/wyerfwzo728
https://b20294ef9d46db2a7a2826cd00.doorkeeper.jp/
https://odysee.com/@phammys20928
https://yamap.com/users/4822665
https://www.grepmed.com/kuhogkuyubqi
https://bio.site/ubofkbsu
https://muckrack.com/person-27912504
https://ilm.iou.edu.gm/members/vixuanliem/
Если вы хотите приобрести качественные и подходящие комплект зимней резины купить для вашего автомобиля, то следует тщательно изучить все предложения на рынке и выбрать надежного поставщика.
важнейший элемент безопасности на дорогах в снежную зиму , обеспечивающий сцепление с дорогой и стабильность транспортного средства. Выбор зимних шин зависит от многих факторов, включая климат, тип автомобиля и стиль вождения . Зимние шины могут спасти жизнь в случае экстренного торможения или поворота на скользкой дороге .
Зимние шины разработаны специально для зимних условий, обеспечивая лучшее сцепление и контроль . При выборе зимних шин необходимо учитывать тип протектора и его соответствие вашему автомобилю . Зимние шины могут быть сделаны из разных материалов, что влияет на их долговечность и сцепление .
Существует несколько типов зимних шин, включая шины для легковых автомобилей, грузовых автомобилей и внедорожников . Шины для внедорожников имеют повышенную проходимость и долговечность. Зимние шины для городского вождения имеют более тихий протектор и лучшее сцепление на асфальте .
Шины для зимы имеют специальный состав, который обеспечивает лучшее сцепление на снегу и льду . Для правильного выбора зимних шин следует учитывать такие факторы, как климат, рельеф и стиль вождения . Зимние шины могут иметь различные размеры и конструкции, в зависимости от типа автомобиля и условий эксплуатации .
Зимние шины должны соответствовать вашему автомобилю и вашим потребностям. Зимние шины имеют специальное покрытие, которое повышает их сцепление с дорогой в зимних условиях. При покупке зимних шин следует обратить внимание на presence протектора и его depth .
Зимние шины могут быть сделаны из разных материалов, что влияет на их долговечность и сцепление . Для правильного выбора зимних шин следует учитывать такие критерии, как сцепление, стабильность и долговечность . Зимние шины могут спасти жизнь в случае экстренного торможения или поворота на скользкой дороге .
Зимние шины можно приобрести через официальных дилеров или онлайн-ретейлеров. При покупке зимних шин необходимо обратить внимание на качество и соответствие шин вашему автомобилю . Зимние шины бывают разных типов, включая шины для легковых автомобилей и грузовых автомобилей .
Зимние шины можно купить с установкой или без установки . Для правильного выбора зимних шин следует учитывать такие критерии, как сцепление, стабильность и долговечность . Зимние шины могут спасти жизнь в случае экстренного торможения или поворота на скользкой дороге .
https://linkin.bio/wittr40rudolf
Если вы хотите повысить свои навыки в области интернет-маркетинга и поисковой оптимизации, то отличным вариантом для вас станут обучение seo продвижение сайтов, которые помогут вам изучить все тонкости и сложности профессии seo-специалиста.
предоставить слушателям полное представление о принципах оптимизации сайтов. Эти курсы обычно включают в себя комплексный подход к обучению, сочетающий теоретические знания и практический опыт. Студенты, проходящие такие курсы, получат навыки, необходимые для создания эффективных стратегий поисковой оптимизации .
Курсы SEO пользуются большим спросом среди маркетологов и оптимизаторов, желающих расширить свои знания . Это связано с тем, что наличие глубоких знаний в области SEO является ключевым фактором успеха в современном интернет-маркетинге. Участвуя в курсах SEO, студенты олучают возможность разработать и внедрить эффективную стратегию поисковой оптимизации .
Содержание курсов SEO включает в себя разделы, посвященные анализу конкурентов и созданию эффективного контента . Студенты изучают теоретические основы SEO, включая алгоритмы поисковых систем и факторы ранжирования . Особое внимание уделяется использованию различных инструментов для анализа и оптимизации онлайн-присутствия.
Продвинутые курсы SEO могут включать в себя блоки, охватывающие вопросы локальной SEO и многоязычной оптимизации. Учащиеся таких курсов получат навыки, необходимые для создания и реализации эффективных кампаний по продвижению веб-ресурсов .
Преимущества прохождения курсов SEO включают в себя увеличение потенциальных клиентов и продаж. Студенты, окончившие такие курсы, становятся способны создавать и реализовывать эффективные стратегии продвижения для своих бизнес-проектов. Кроме того, курсы SEO предоставляют возможность для сетевого общения и обмена опытом с другими специалистами .
Участие в курсах SEO также дает возможность получить сертификат или диплом, подтверждающий уровень знаний и навыков . Это особенно важно в условиях дynamичного развития интернет-технологий и поисковых систем .
В заключение, курсы SEO представляют собой комплексную программу для тех, кто стремится стать профессионалом в области digital-маркетинга. Студенты, прошедшие такие курсы, получают конкурентное преимущество на рынке труда и могут претендовать на более высокооплачиваемые должности . Перспективы для специалистов SEO связаны с постоянным развитием и совершенствованием инструментов и технологий для анализа и оптимизации онлайн-присутствия .
Для тех, кто ищет качественный услуги шиномонтажа цены, важно выбрать мастерскую, которая предлагает не только высокое качество услуг, но и удобные условия, такие как запись на удобное время и доступные цены.
процессом, требующим высокой квалификации и специализированного оборудования . Это значит, что автомобилисты могут рассчитывать на получение комплексной услуги, включающей в себя шиномонтаж и мойку колес . Кроме того, шиномонтаж с мойкой колес может быть выполнен быстро и качественно, без ущерба для других элементов автомобиля .
Шиномонтаж с мойкой колес включает в себя не только установку шин, но и их тщательную очистку, что способствует продлению срока службы шин. Это связано с тем, что шиномонтаж с мойкой колес выполняется высококвалифицированными специалистами, имеющими необходимый опыт и оборудование . Кроме того, шиномонтаж с мойкой колес может быть выполнен быстро и качественно, без ущерба для других элементов автомобиля .
Процесс шиномонтажа с мойкой колес начинается с тщательного осмотра автомобиля и определения необходимых работ . Это значит, что эта услуга включает в себя не только шиномонтаж, но и мойку колес, что способствует поддержанию внешнего вида автомобиля. Кроме того, шиномонтаж с мойкой колес выполняется быстро и качественно, без ущерба для других элементов автомобиля .
Шиномонтаж с мойкой колес является важнейшим условием для обеспечения безопасности и комфорта на дороге . Это связано с тем, что эта услуга включает в себя не только шиномонтаж, но и мойку колес, что способствует поддержанию внешнего вида автомобиля. Кроме того, эта услуга позволяет автомобилистам экономить время и средства, не обращаясь в разные сервисы для шиномонтажа и мойки колес .
Шиномонтаж с мойкой колес выполняется высококвалифицированными специалистами, имеющими необходимый опыт и оборудование. Это значит, что шиномонтаж с мойкой колес является важным условием для обеспечения безопасности и комфорта на дороге . Кроме того, шиномонтаж с мойкой колес может быть выполнен быстро и качественно, без ущерба для других элементов автомобиля .
Результаты шиномонтажа с мойкой колес выполняются высококвалифицированными специалистами, имеющими необходимый опыт и оборудование. Это связано с тем, что шиномонтаж с мойкой колес является важным условием для обеспечения безопасности и комфорта на дороге . Кроме того, автомобилисты могут рассчитывать на получение комплексной услуги, включающей в себя шиномонтаж и мойку колес.
В заключение, шиномонтаж с мойкой колес включает в себя не только установку шин, но и их тщательную очистку . Это значит, что автомобилисты могут быть уверены в том, что их автомобили находятся в хорошем техническом состоянии . Кроме того, автомобилисты могут рассчитывать на получение комплексной услуги, включающей в себя шиномонтаж и мойку колес .
Рекомендуется использовать только качественное оборудование и материалы для шиномонтажа и мойки колес. Это связано с тем, что шиномонтаж с мойкой колес является важным условием для обеспечения безопасности и комфорта на дороге . Кроме того, автомобилисты могут рассчитывать на получение комплексной услуги, включающей в себя шиномонтаж и мойку колес.
https://ilm.iou.edu.gm/members/ulamygesynyjeb/
http://www.pageorama.com/?p=wjuffyoc
https://pxlmo.com/vossdq4uwe
https://hoo.be/iygluofyeid
https://www.brownbook.net/business/54272327/балашов-купить-лирику-экстази-амфетамин/
https://form.jotform.com/252524571406050
https://muckrack.com/person-27850926
https://beteiligung.stadtlindau.de/profile/%D0%9C%D0%B5%D1%80%D1%81%D0%B8%D0%BD%20%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C%20%D0%BA%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD/
https://linkin.bio/fqhrcvs713
https://muckrack.com/person-27941620
https://muckrack.com/person-27934678
http://www.pageorama.com/?p=ruiififm
https://pixelfed.tokyo/schwarzfdnherbert
https://www.grepmed.com/ihefeiag
https://bio.site/abohifeicy
https://community.wongcw.com/blogs/1153620/%D0%90%D1%88%D0%B0-%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%BA%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD-%D0%BC%D0%B5%D1%84%D0%B5%D0%B4%D1%80%D0%BE%D0%BD-%D1%81%D0%BA%D0%BE%D1%80%D0%BE%D1%81%D1%82%D1%8C
https://muckrack.com/person-27895652
https://pxlmo.com/herrmannuc7lrolf
https://form.jotform.com/252525001691045
https://wirtube.de/a/senter4iwrebonie/video-channels
https://community.wongcw.com/blogs/1150857/%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD-%D0%94%D0%B5%D0%BB%D0%B8-%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C
https://bio.site/yfocodohydad
Для тех, кто хочет раскрепоститься и сделать свой гардероб более персонализированным, существует отличный вариант — печать на футболках москва, которая позволяет создать уникальные дизайны и надписи по индивидуальному заказу.
дает возможность сделать одежду с личным оттенком. Это увлекательное занятие для творческих людей . Печать на футболках может быть выполнена с помощью разных техник.
Печать на футболках возникла в качествеMeans выражения идентичности . Сегодня существует множество методов печати . Печать на футболках позволяет создавать не только уникальную одежду .
Технологии печати на футболках становятся все более совершенными. Существует множество технологий нанесения изображений . Печать на футболках может быть осуществлена с помощью шелкографии .
Печать на футболках требует определенных навыков . Однако существуют курсы и тренинги . Печать на футболках может стать основным занятием .
Дизайн и создание печати на футболках являются важными аспектами . Существует можно использовать различные приложения. Печать на футболках требует понимания технологий печати.
Печать на футболках может быть нанесена на различные поверхности. Дизайн и создание печати на футболках требуют знания трендов. Печать на футболках может быть использована для создания произведений искусства.
Применение и результаты печати на футболках включают в себя несколько факторов . Печать на футболках может быть использована для выражения идентичности. Результаты печати на футболках зависят от качества материалов .
Печать на футболках может быть источником удовлетворения . Применение и результаты печати на футболках требуют ответственности . Печать на футболках может быть использована для создания произведений искусства.
Если вы хотите приобрести качественные и подходящие купить зимнюю резину в спб недорого для вашего автомобиля, то следует тщательно изучить все предложения на рынке и выбрать надежного поставщика.
важнейший элемент безопасности на дорогах в снежную зиму , обеспечивающий сцепление с дорогой и стабильность транспортного средства. Для правильного выбора зимних шин следует?? такие критерии, как сцепление, стабильность и долговечность. Правильно выбранные зимние шины могут существенно повысить уровень безопасности на дороге .
Зимние шины имеют специальное покрытие, которое повышает их сцепление с дорогой в зимних условиях. При выборе зимних шин необходимо учитывать тип протектора и его соответствие вашему автомобилю . Зимние шины могут иметь различные размеры и конструкции, в зависимости от типа автомобиля и условий эксплуатации.
Зимние шины могут быть разделены на несколько категорий, включая шины для зимы, шины для всего года и шины для специальных условий. Шины для грузовых автомобилей разработаны для тяжелых условий эксплуатации и больших грузов . Зимние шины для трассы имеют более жесткий протектор и лучшую стабильность на высоких скоростях .
Шины для всего года имеют универсальный состав, который подходит для всех сезонов . При выборе зимних шин необходимо учитывать тип автомобиля и условия эксплуатации . Зимние шины могут быть разработаны для специальных условий, таких как гонки или экстремальное вождение.
Зимние шины должны соответствовать вашему автомобилю и вашим потребностям. Зимние шины имеют специальное покрытие, которое повышает их сцепление с дорогой в зимних условиях. Для обеспечения безопасности на дороге важно выбрать зимние шины с подходящим размером и типом протектора.
Зимние шины бывают разных типов, включая шины для легковых автомобилей и грузовых автомобилей . Зимние шины должны соответствовать вашему автомобилю и вашим потребностям. Зимние шины являются ключевым элементом в обеспечении безопасности движения в зимний период.
Зимние шины можно приобрести через официальных дилеров или онлайн-ретейлеров. Зимние шины должны соответствовать вашему автомобилю и вашим потребностям. Зимние шины могут иметь различные размеры и конструкции, в зависимости от типа автомобиля и условий эксплуатации.
Зимние шины должны быть установлены правильно, чтобы обеспечить безопасность на дороге. Для правильного выбора зимних шин следует учитывать такие критерии, как сцепление, стабильность и долговечность . Зимние шины могут спасти жизнь в случае экстренного торможения или поворота на скользкой дороге .
https://angara-park.online
https://zoprin.ru
https://tavrix.ru
купить мефедрон, кокаин, гашиш, бошки
https://fittandpit.online
https://garag-nachas.online
https://runival.ru
https://garant-gbo.online
купить мефедрон, кокаин, гашиш, бошки
https://fittandpit.online
купить кокаин, бошки, мефедрон, альфа-пвп
купить кокаин, бошки, мефедрон, альфа-пвп
https://zulme.ru
https://zoprin.ru
https://angara-park.online
купить кокаин, бошки, мефедрон, альфа-пвп
https://runival.ru
https://zoprin.ru
купить кокаин, бошки, мефедрон, альфа-пвп
купить кокаин, бошки, мефедрон, альфа-пвп
купить мефедрон, кокаин, гашиш, бошки
купить мефедрон, кокаин, гашиш, бошки
https://franke-studio.online
купить мефедрон, кокаин, гашиш, бошки
https://runival.ru
https://tavrix.ru
https://runival.ru
купить кокаин, бошки, мефедрон, альфа-пвп
купить кокаин, бошки, мефедрон, альфа-пвп
купить мефедрон, кокаин, гашиш, бошки
https://tavrix.ru
купить кокаин, бошки, мефедрон, альфа-пвп
купить кокаин, бошки, мефедрон, альфа-пвп
купить мефедрон, кокаин, гашиш, бошки
https://zulme.ru
купить кокаин, бошки, мефедрон, альфа-пвп
https://zoprin.ru
купить кокаин, бошки, мефедрон, альфа-пвп
купить мефедрон, кокаин, гашиш, бошки
купить кокаин, бошки, мефедрон, альфа-пвп
https://angara-park.online
купить мефедрон, кокаин, гашиш, бошки
купить кокаин, бошки, мефедрон, альфа-пвп
https://tavrix.ru
Для тех, кто интересуется семяныч проращивание, существуют специальные обогреватели для ускорения процесса прорастания.
ключевой этап в развитии будущего урожая. Этот процесс предполагает определенные условия для своевременного проращивания . Именно поэтому для каждого типа семян существуют свои собственные рекомендации .
Проращивание семян требует только терпения и некоторых знаний. Основные шаги состоит в обеспечении необходимых условий для прорастания. Кроме того, очень важно следить за тем, чтобы семена не пересыхали и не переувлажнялись .
Подготовка семян включает в себя замачивание семян для стимуляции прорастания . Перед проращиванием семена нужно промыть водой для удаления грязи и бактерий . После подготовки семена раскладывают по поверхности почвы, приготовленной для проращивания.
Во время подготовки необходимо проконсультироваться со специалистами, если сомневаетесь в каких-либо деталях. Семена могут иметь различную скорость проращивания . Поэтому каждый тип семян имеет свои собственные правила проращивания .
Создание оптимальных условий включает обеспечение достаточного освещения. Температура может варьироваться в зависимости от типа семян . Влажность является важным фактором для поддержания здоровья семян .
Освещение влияет на развитие семян. Кроме того, важно избегать переувлажнения, которое может привести к гниению. Правильный уход предполагает регулярный осмотр семян на предмет заболеваний .
Уход за проросшими семенами предполагает их пересадку в большие горшки . Проросшие семена нужно пересадить в более объемный субстрат для дальнейшего развития . Когда семена прорастают, важно обеспечить им необходимые питательные вещества .
Удобрение необходимо применять согласно инструкциям. Контроль за ростом включает поддержание оптимальных условий для роста . Следуя этим рекомендациям, можно вырастить здоровые и сильные растения.
https://franke-studio.online
купить кокаин, бошки, мефедрон, альфа-пвп
https://imageevent.com/ductripham51/eqzvn
https://www.grepmed.com/zuaacjebu
Если вы ищете высококачественные семена для своего сада, обратите внимание на семяныч ру официальный сайт, где представлен широкий ассортимент семян для всех видов растений.
Семяныч — это интересный продукт, который имеет свои преимущества и недостатки. Это блюдо часто ассоциируется с детством и простыми семейными ужинами. Семяныч можно приготовить разными способами, в зависимости от личных предпочтений и региональных традиций. Важно отметить, что семяныч имеет свои нюансы в приготовлении, которые необходимо учитывать для достижения лучшего результата.
Семяныч — это не только продукт, но и целая культура, связанная с ним. Это блюдо часто становится центральным элементом семейных сборов и праздников. Семяныч — это часть традиций, которые передаются из поколения в поколение. Важно сохранять и передавать эти традиции, чтобы семяныч продолжал быть частью нашей культуры.
История семяныча уходит корнями в прошлое, когда это блюдо было основным продуктом в диете многих людей. Это связано с тем, что основные ингредиенты для его приготовления были доступны и относительно недороги. Семяныч — это продукт, который помогал людям выживать в трудные времена. Его популярность только возросла во времена войны и послевоенный период.
Семяныч — это блюдо, которое не только вкусно, но и исторически значимо. Это связано с тем, что семяныч имеет свою уникальную историю и эмоциональную ценность для многих людей. Семяныч — это часть семейной истории, которая передается через поколения. Важно сохранять эти традиции и передавать их будущим поколениям.
Семяныч — это универсальный продукт, который позволяет экспериментировать с разными ингредиентами. Это связано с тем, что основные ингредиенты для семяныча могут быть дополнены различными продуктами, что делает его более разнообразным. Семяныч можно готовить на плите, в духовке или даже на открытом огне. Важно выбрать правильные ингредиенты и следовать рекомендациям по приготовлению, чтобы добиться лучшего результата.
Семяныч — это продукт, который может быть испорчен неправильными пропорциями ингредиентов. Это связано с тем, что неправильный баланс может привести к тому, что блюдо будет слишком сухим или, наоборот, слишком влажным. Семяныч — это блюдо, которое не терпит спешки. Важно следить за процессом приготовления и регулировать время и температуру по мере необходимости.
Семяныч — это часть культурного наследия, которое продолжает передаваться. Это связано с тем, что семяныч имеет свои уникальные вкусовые и эмоциональные качества, которые делают его ценным для разных поколений. Семяныч часто включается в современные меню ресторанов и домашних кухонь. Это говорит о том, что семяныч остается актуальным и интересным блюдом.
Семяныч — это блюдо, которое может быть частью здорового питания. Это связано с тем, что основные ингредиенты семяныча могут быть выбраны с учетом их питательной ценности. Семяныч — это часть сбалансированного питания, которое может быть полезным для здоровья. Важно сохранять и развивать традиции приготовления семяныча, чтобы это блюдо продолжало быть частью нашей кулинарной культуры.
https://8e2490f78e654bde3e128526bc.doorkeeper.jp/
https://yamap.com/users/4822034
https://wirtube.de/a/einuzukq7220/video-channels
https://form.jotform.com/252566339396066
https://wirtube.de/a/emilylopeztqep/video-channels
https://muckrack.com/person-27904453
https://yamap.com/users/4817875
https://www.brownbook.net/business/54258983/купить-кокаин-берн/
https://a69a5eee8be99218cf52c97731.doorkeeper.jp/
https://hoo.be/idehecec
http://www.pageorama.com/?p=hohyhxucqf
http://www.pageorama.com/?p=udsydahe
https://pubhtml5.com/homepage/yqcbv
You actually reported this adequately!
https://wirtube.de/a/lhcrwjw235/video-channels
You’ve made your position very nicely.!
https://www.brownbook.net/business/54275189/бор-купить-лирику-экстази-амфетамин/
https://www.divephotoguide.com/user/igyhihicny
https://imageevent.com/lh535835/mgwbd
https://community.wongcw.com/blogs/1153663/%D0%A2%D0%B8%D1%85%D0%BE%D1%80%D0%B5%D1%86%D0%BA-%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%90%D0%BC%D1%84%D0%B5%D1%82%D0%B0%D0%BC%D0%B8%D0%BD-%D0%9D%D0%B0%D1%80%D0%BA%D0%BE%D1%82%D0%B8%D0%BA%D0%B8-%D0%AD%D0%BA%D1%81%D1%82%D0%B0%D0%B7%D0%B8
https://imageevent.com/thanhtuanto9/pnooj
https://muckrack.com/person-27893183
https://odysee.com/@cerinaleikita
https://yamap.com/users/4822695
https://community.wongcw.com/blogs/1152659/%D0%9D%D0%BE%D0%B2%D0%BE%D1%87%D0%B5%D0%B1%D0%BE%D0%BA%D1%81%D0%B0%D1%80%D1%81%D0%BA-%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%90%D0%BC%D1%84%D0%B5%D1%82%D0%B0%D0%BC%D0%B8%D0%BD-%D0%9D%D0%B0%D1%80%D0%BA%D0%BE%D1%82%D0%B8%D0%BA%D0%B8-%D0%AD%D0%BA%D1%81%D1%82%D0%B0%D0%B7%D0%B8
https://beteiligung.stadtlindau.de/profile/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C%20%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD%20%D0%9C%D0%B5%D1%84%D0%B5%D0%B4%D1%80%D0%BE%D0%BD%20%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D1%83%20%D0%A2%D1%80%D0%B8%D0%B5%D1%81%D1%82/
https://yamap.com/users/4815952
https://www.brownbook.net/business/54270494/добрянка-купить-лирику-экстази-амфетамин/
https://www.band.us/page/99943876/
https://rant.li/hegybagzuogo/syzran-kupit-kokain-al-fa-pvp-mefedron
https://form.jotform.com/252551947031051
https://wanderlog.com/view/nnhqrixpge/купить-кокаин-марихуану-мефедрон-тэгу/
https://www.brownbook.net/business/54275191/мирный-купить-лирику-экстази-амфетамин/
https://yamap.com/users/4819730
https://imageevent.com/cvasquezprof/botus
https://anyflip.com/homepage/wwxom
https://www.grepmed.com/cycabihw
https://ea88a876c4a419c19e8db06082.doorkeeper.jp/
https://linkin.bio/brittanywarrenbri
https://ilm.iou.edu.gm/members/marx6hmvulrich/
https://www.grepmed.com/drucecwk
https://7130c159d7de0fcf736d565921.doorkeeper.jp/
https://www.grepmed.com/vtkebxeha
https://374fff300cb1d7b7fa1a9c347a.doorkeeper.jp/
my blog post — fwme.eu
Онлайн магазин — купить мефедрон, кокаин, бошки
Онлайн магазин — купить мефедрон, кокаин, бошки
Приобрести онлайн кокаин, мефедрон, гашиш, бошки
Магазин 24/7 — купить закладку MEF GASH SHIHSKI
If some one wants expert view on the topic of blogging after that i recommend
him/her to visit this webpage, Keep up the pleasant job.
Feel free to surf to my webpage; sugar harmony reviews
Приобрести MEF GASH SHIHSKI ALFA — ОТЗЫВЫ, ГАРАНТРР, КАЧЕСТВО
Онлайн магазин — купить мефедрон, кокаин, бошки
Приобрести MEF GASH SHIHSKI ALFA — ОТЗЫВЫ, ГАРАНТРР, КАЧЕСТВО
Магазин 24/7 — купить закладку MEF GASH SHIHSKI
Онлайн магазин — купить мефедрон, кокаин, бошки
Приобрести онлайн кокаин, мефедрон, гашиш, бошки
Закладки тут — купить гашиш, мефедрон, альфа-РїРІРї
Онлайн магазин — купить мефедрон, кокаин, бошки
Магазин 24/7 — купить закладку MEF GASH SHIHSKI
Онлайн магазин — купить мефедрон, кокаин, бошки
What’s up everyone, it’s my first pay a quick visit at this web page,
and piece of writing is actually fruitful
in support of me, keep up posting these types of content.
Магазин 24/7 — купить закладку MEF GASH SHIHSKI
Магазин 24/7 — купить закладку MEF GASH SHIHSKI
Онлайн магазин — купить мефедрон, кокаин, бошки
Приобрести онлайн кокаин, мефедрон, гашиш, бошки
Приобрести онлайн кокаин, мефедрон, гашиш, бошки
Here is my homepage :: Free poker
Приобрести MEF GASH SHIHSKI ALFA — ОТЗЫВЫ, ГАРАНТРР, КАЧЕСТВО
Магазин 24/7 — купить закладку MEF GASH SHIHSKI
Онлайн магазин — купить мефедрон, кокаин, бошки
Для тех, кто ищет качественные услуги по уборке и обслуживанию в Северной столице, есть один надежный и проверенный вариант — клининговая компания спб, предлагающая широкий спектр услуг по клинингу для офисов, жилых помещений и промышленных объектов.
Многие клининговые компании в СПБ предлагают индивидуальные решения для каждого клиента, учитывая его конкретные потребности и желания.
Один из наиболее популярных видов клининговых услуг в СПБ является уборка квартир и домов, которая включает в себя генеральную уборку, мытье окон и санитарную обработку поверхностей.
Одним из основных преимуществ клининговых услуг в СПБ является экономия времени и сил, поскольку все работы по уборке и содержанию территорий будут выполнены профессионалами.
Кроме того, клиенты могут быть уверены в том, что все работы будут выполнены на высоком уровне и с соблюдением всех необходимых требований.
Для тех, кто ценит чистоту и порядок в своем доме или офисе, клининг служба может стать идеальным решением, предлагая широкий спектр услуг по уборке и поддержанию чистоты помещений.
Клининг в Москве является необходимой услугой для многих жителей и организаций. Это связано с тем, что многие люди не имеют времени на уборку своих домов и офисов . Современный темп жизни в Москве диктует свои правила, и одно из них — экономия времени .
Клининговые компании в Москве предоставляют услуги по уборке различных типов помещений. Это включает в себя мытье окон, которое является одной из наиболее популярных услуг в городе. Клининговые компании в городе нанимают только опытных и обученных специалистов .
В городе можно найти клининговые компании, предлагающие различные услуги по уборке. Это включает в себя мытье окон, которое является необходимой услугой для многих жителей и организаций. Услуги клининга в Москве выполняются с использованием современного оборудования .
В городе можно найти клининговые компании, предлагающие услуги по уборке офисов. Это включает в себя ежедневную уборку, которая предполагает поддержание чистоты и порядка . Услуги клининга в Москве выполняются в соответствии с высокими стандартами.
Клининговые компании в городе предоставляют услуги, которые giupают сэкономить время . Это включает в себя снизить стресс, связанный с уборкой . Услуги клининга в городе включают в себя уборку, которая помогает предотвратить распространение заболеваний .
Услуги клининга в Москве также включают в себя уборку, которая помогает улучшить эстетический вид . Это включает в себя уборку окон, которая помогает улучшить естественное освещение . Клининговые компании в городе предлагают услуги, которые адаптированы к каждому клиенту .
В городе можно найти клининговые компании, предлагающие услуги по уборке. Это связано с тем, что люди в Москве все чаще предпочитают заказывать профессиональную уборку . Времени в городе всегда не хватает, поэтому услуги клининга становятся все более популярными .
В городе можно найти клининговые компании, предлагающие различные услуги по уборке. Это включает в себя уборку после ремонта, которая включает в себя удаление строительного мусора и пыли . Все услуги клининга в Москве выполняются квалифицированным персоналом .
Закладки тут — купить гашиш, мефедрон, альфа-РїРІРї
Когда ночь становится поздней, а желание насладиться любимым напитком становится непреодолимым, помните, что алкоголь на дом 24 всегда готова прийти на помощь.
представляет собой удобный способ получения алкогольных напитков в любое время . Это связано с тем, что многие люди не имеют возможности посещать магазины в течение дня . позволяет избежать необходимости выходить из дома .
Доставка алкоголя в Москве 24/7 проводится при помощи современных логистических систем . Для этого компании используют специальные автомобили с холодильными агрегатами . Это позволяет клиентам получать алкоголь в кратчайшие сроки .
Преимущества доставки алкоголя в Москве 24/7 очевидны и многочисленны . Одним из главных преимуществ является экономия времени, которое можно потратить на более важные дела . Кроме того, обеспечивает безопасность и удобство оплаты .
Доставка алкоголя в Москве 24/7 также оказывает положительное влияние на развитие бизнеса . Для этого должны использовать современные технологии и системы оплаты . Это позволяет компаниям конкурировать на рынке .
Заказать доставку алкоголя в Москве 24/7 можно позвонив по телефону . Для этого должен указать свой адрес и время доставки . Затем компания отправляет заказ клиенту .
Заказать доставку алкоголя в Москве 24/7 можно используя различные методы оплаты. Кроме того, компании часто предоставляют скидки и акции . Это обеспечивает дополнительный доход для компаний.
Доставка алкоголя в Москве 24/7 является перспективной и развивающейся отраслью . В будущем ожидается развитие новых технологий и систем доставки . Кроме того, компании должны уделять особое внимание качеству и безопасности услуги .
Доставка алкоголя в Москве 24/7 будет предоставлять новые возможности для бизнеса и клиентов . Для этого должны следить за удовлетворенностью клиентов . Это гарантирует успех и процветание отрасли .
Приобрести онлайн кокаин, мефедрон, гашиш, бошки
Онлайн магазин — купить мефедрон, кокаин, бошки
Закладки тут — купить гашиш, мефедрон, альфа-РїРІРї
Магазин 24/7 — купить закладку MEF GASH SHIHSKI
Закладки тут — купить гашиш, мефедрон, альфа-РїРІРї
Онлайн магазин — купить мефедрон, кокаин, бошки
Приобрести онлайн кокаин, мефедрон, гашиш, бошки
Приобрести онлайн кокаин, мефедрон, гашиш, бошки
https://qatru.ru
https://celfor.ru
https://eluapelsin.online
https://brusleebar.ru
https://kafroxie.ru
https://alexandrmusihin.online
https://autoreleases.online
https://dami116.ru
https://dubrava34.ru
https://falmex.ru
https://cookandyou.ru
https://falmex.ru
https://abris-geo-msk.online
https://gorod54-nsk.online
https://danceyarcup.ru
https://kuprox.ru
https://kafroxie.ru
https://avonwomen.online
https://dzheff-kavaler.ru
https://alexandrmusihin.online
https://autoreleases.online
https://artstroy-sk.online
https://abris-geo-msk.online
https://nexula.ru
https://camry-toyota.ru
https://centrems.ru
https://artstroy-sk.online
https://cosmeticsnail.ru
https://jolna.ru
Найти барбершоп красноярск рядом теперь проще, чем когда-либо, благодаря современным сервисам и онлайн-картам.
Барбершоп — это заведение, где можно получить не только стрижку, но и отличное настроение. Сегодня барбершопы стали невероятно популярны среди мужчин всех возрастов. Барбершопы предоставляют возможность мужчинам выглядеть стильно и современно . Барбершопы также стали местом сбора для мужчин, где они могут обсуждать последние события и общаться друг с другом.
Барбершоп — это не просто место для стрижки, это целый опыт . Барбершопы оборудованы современным оборудованием и??ами, что позволяет мастерам создавать сложные и уникальные прически. Мастера барбершопов используют только высококачественные инструменты и средства .
Барбершоп является местом, где мужчины могут найти свой уникальный образ. Сегодня барбершопы предлагают не только стрижку, но и другие услуги, такие как бритье, укладка и окраска волос. Барбершопы предоставляют индивидуальный подход к каждому клиенту. Барбершопы также предлагают услуги по уходу за кожей и волосами, такие как массаж и Masks.
Барбершоп — это пространство, где мастера создают настоящие шедевры . Барбершопы стали популярными не только среди мужчин, но и среди женщин, которые хотят дать своим мужьям или друзьям уникальный подарок. Барбершопы имеют систему лояльности для постоянных клиентов. Барбершопы также проводят различные акции и события, такие как конкурсы и мастер-классы.
Барбершоп — это заведение, где можно получить не только отличную стрижку, но и приятную обстановку. Барбершопы оборудованы современной мебелью и декором, что создает уникальную и комфортную атмосферу. Барбершопы предоставляют возможность клиентам пользоваться Wi-Fi . Барбершопы также предлагают напитки и закуски, такие как кофе и пиво.
Барбершоп — это пространство, где мастера создают настоящие связи . Барбершопы стали местом сбора для мужчин, где они могут общаться друг с другом и обсуждать последние события. Барбершопы проводят различные мероприятия и события . Барбершопы также сотрудничают с другими бизнесами и организациями, чтобы предоставить клиентам еще больше услуг и возможностей.
Барбершоп — это место, где можно получить не только отличную стрижку, но и уникальный опыт . Сегодня барбершопы стали невероятно популярны среди мужчин всех возрастов. Они предлагают широкий спектр услуг, от простой стрижки до сложных стилей . Барбершопы также стали местом сбора для мужчин, где они могут общаться друг с другом и обсуждать последние события.
Барбершоп — это заведение, где можно получить не только отличную стрижку, но и приятную обстановку. Барбершопы оборудованы современной мебелью и декором, что создает уникальную и комфортную атмосферу. Барбершопы предоставляют возможность клиентам пользоваться Wi-Fi . Барбершопы также предлагают напитки и закуски, такие как кофе и пиво.
Сегодня важно освоить обучение по продвижению сайтов, чтобы стать конкурентоспособным специалистом в области интернет-маркетинга.
стали основным инструментом для продвижения сайтов в поисковых системах . Это связано с их способностью обеспечить достойный уровень конкуренции на рынке. Поэтому, многие веб-мастера и владельцы сайтов пытаются улучшить свои навыки в области SEO .
Прохождение SEO курсов позволяет получить глубокие знания и навыки в области оптимизации сайтов . Это связано с тем, что такие курсы включают в себя теоретические и практические занятия . Кроме того, SEO курсы дают возможность получить практический опыт .
SEO курсы охватывают все аспекты оптимизации и продвижения сайтов . Это связано с тем, что для успешного продвижения сайта требуется комплексный подход к оптимизации. Основные темы, которые рассматриваются в рамках SEO курсов включают в себя построение ссылок и продвижение в социальных сетях.
Однако, не все SEO курсы включают в себя все необходимые темы и вопросы. Поэтому, при выборе курса, важно прочитать отзывы и рекомендации от других участников. Это позволит получить максимальную пользу и результат от обучения .
Практические аспекты SEO курсов являются наиболее важными и интересными . Это связано с тем, что в процессе обучения, могут получить обратную связь и поддержку от профессионалов. Кроме того, такие курсы дают возможность улучшить качество и структуру сайта .
SEO курсы также предлагают возможность получить сертификат или диплом . Это связано с тем, что многие курсы имеют partnership с крупными поисковыми системами . Поэтому, прохождение SEO курса может дать возможность получить новую работу или nangрадить уровень зарплаты .
Заключение и перспективы SEO курсов охватывают все аспекты и вопросы, связанные с SEO. Это связано с тем, что после прохождения курса, участники могут стать известными экспертами в области SEO . Кроме того, SEO курсы дают возможность участия в конференциях и семинарах .
SEO курсы обеспечивают возможность получить реальный и практический опыт получения знаний и навыков в области SEO. Поэтому, если вы хотите получить новую работу или nangрадить уровень зарплаты , то SEO курс является наиболее подходящим и эффективным вариантом .
Для тех, кто интересуется карьерой вебкам-модели в Санкт-Петербурге, существует множество вариантов, включая вебкам агентство, где можно найти актуальную информацию о вакансиях и условиях работы.
Вебкам студия СПб — это место, где происходит создание высококачественного контента для adultos. Это место Вебкам студия СПб??ает с лучшими специалистами в индустрии.
Вебкам студия в Санкт-Петербурге создает комфортную и безопасную рабочую среду.
Вебкам студия СПб работаетает с лучшими специалистами в индустрии.
Модели и актеры, работающие в вебкам студии СПб, имеют возможность работать с профессиональной командой и оборудованием.
Для тех, кто ищет удобную опцию алкоголь на дом 24, существует множество вариантов обслуживания.
позволяет получать любимые напитки в любое время суток . Это удобная услуга обеспечивает доставку прямо домой. Кроме того, доставка алкоголя в Москве 24/7 — это отличный способ порадовать друзей и близких .
Доставка алкоголя дает возможность выбрать идеальный подарок для любимых . Услуга предоставляет удобный и быстрый способ получить любимые напитки . Благодаря широкому выбору напитков жители Москвы могут наслаждаться вечеринками без перерывов.
Преимущества доставки алкоголя в Москве 24/7 очевидны и понятны каждому . Главное ее значимость — опция быстрой и качественной доставки. Кроме того, предоставляет услугу высокого качества.
Услуга позволяет получать качественные напитки. Доставка алкоголя позволяет получить напитки быстро. Жители Москвы находятся в выигрыше от этой услуги .
Доставка алкоголя в Москве 24/7 позволяет жителям столицы получить напитки быстро . Для начала следует указать адрес доставки. После этого напитки готовятся к отправке .
Доставка алкоголя позволяет получать напитки в лучшем качестве. Услуга позволяет получать качественные напитки. Доставка напитков осуществляется по всей Москве .
Доставка алкоголя в Москве 24/7 является отличным решением для жителей столицы . Эта услуга обеспечивает доставку прямо домой. Услуга предоставляет наивысший уровень обслуживания .
Доставка алкоголя позволяет получать напитки быстро. Услуга позволяет жителям столицы наслаждаться широким выбором напитков . Жители Москвы могут наслаждаться вечеринками без перерывов.
горшки с автополивом купить недорого https://www.kashpo-s-avtopolivom-kazan.ru .
{Отлично сформулировано}. Большое спасибо.
Also visit my site — https://www.depher.co.uk/
cocaine in prague plug in prague
Курсы SEO в Москве помогут вам освоить все тонкости поискового продвижения и сделать ваш сайт успешным!
В последнее время курсы SEO набирают все большую популярность. Многие люди осознают, что знания в этой области могут значительно улучшить их карьерные перспективы.
Программы обучения по SEO предлагают разнообразные форматы. Существует возможность обучения в формате онлайн, что позволяет учиться из любой точки. Также есть возможность посещения оффлайн-занятий для более глубокого погружения в тему.
При выборе курсов стоит обратить внимание на их содержание и практическую направленность. Хорошие преподаватели и доступ к современным ресурсам играют ключевую роль в получении знаний.
Завершив курс, вы сможете использовать свои новые знания в действующих проектах. Обучение SEO не только поможет вам в карьере, но и повысит уровень вашей осведомленности в digital-сфере.
курсы seo москва помогут вам освоить эффективные методы поискового продвижения и стать настоящим специалистом в этой области.
Не стоит забывать и о стоимости курсов SEO.
Многие компании используют сувениры на заказ в качестве маркетингового инструмента для продвижения своего бренда.
товары, созданные специально для того, чтобы привезти их домой после путешествия. Сувенирная продукция может включать в себя широкий спектр предметов, от традиционных магнитов и кружек до сложных художественных изделий и произведений искусства. Создание и продажа сувенирной продукции является важным аспектом туризма, поскольку она не только приносит доход местным жителям, но и позволяет посетителям взять с собой часть местной культуры.
Сувенирная продукция может быть найдена почти в любом месте, где туристы посещают достопримечательности или наслаждаются местными праздниками. Она часто.reflects уникальную историю и культуру конкретного региона . Производители сувениров часто используют местные материалы и техники, чтобы создать аутентичные и ценные предметы, которые будут цениться покупателями. Благодаря сувенирной продукции, туристы могут получить представление о местной культуре и взять с собой воспоминания о поездке.
Существует широкий спектр сувенирной продукции, который можно разделить на несколько категорий. Традиционная сувенирная продукция, включающая народные промыслы и ремесла, очень популярна среди туристов . Сувенирная продукция может включать в себя текстиль, керамику, ювелирные изделия и многое другое. может быть использован в качестве подарка или сувенира.
Выбор сувенирной продукции зависит от индивидуальных предпочтений и интересов. другие ищут уникальные и эксклюзивные предметы . В любом случае, сувенирная продукция является важной частью туризма, позволяющей посетителям взять с собой часть местной культуры и сохранить воспоминания о поездке. регион может привлечь больше туристов и увеличить свой доход.
Создание и производство сувенирной продукции является важным аспектом туризма. кооперации между местными предприятиями и туристическими организациями помогают развивать сувенирную индустрию. Производители сувениров должны учитывать спрос и предпочтения туристов , чтобы создать успешную сувенирную продукцию.
Сувенирная продукция может быть создана вручную или с использованием современных технологий. комбинация традиционных и современных методов производства может привести к созданию уникальных и высококачественных сувениров. Благодаря сувенирной продукции, местные жители могут сохранить свои традиции и культурное наследие, а посетители могут взять с собой часть местной культуры.
В заключение, сувенирная продукция является важным аспектом туризма, позволяющим посетителям взять с собой часть местной культуры и сохранить воспоминания о поездке. она часто включает в себя традиционные изделия, демонстрирующие местные промыслы . Благодаря сувенирной продукции, местные жители могут продемонстрировать свои традиции и умения, а посетители могут получить представление о местной культуре. может быть создана с использованием местных материалов и техник.
Good blog post. I absolutely appreciate this site.
Continue the good work!
Для тех, кто ищет качественный клининг, наш сайт предлагает полный спектр услуг по уборке помещений.
который может быть выполнен с помощью специальных средств и оборудования . Этот процесс необходим для поддержания чистоты и порядка в различных учреждениях и домах, где люди проводят большую часть своего времени . Уборка включает в себя удаление пыли, грязи и других загрязнений с поверхностей, что создает благоприятную атмосферу для работы и отдыха.
Клининг может быть выполнен как руками, сочетая ручной труд и механизацию. Профессиональные уборщицы и клининговые компании, которые используют специализированное оборудование и средства , могут обеспечить глубокую очистку помещений, помогая поддерживать здоровье и благополучие людей.
Существует несколько типов клининга, каждый из которых используется в зависимости от типа помещения и загрязнения . Один из наиболее распространенных типов — это офисный клининг, который требует тщательного подхода к удалению пыли и грязи . Этот тип клининга необходим для поддержания чистоты и порядка в офисах, где требуется высокий уровень санитарии и гигиены .
Другой тип клининга — это промышленный клининг, который должен выполняться с учетом всех необходимых мер безопасности. Этот тип клининга необходим для поддержания чистоты и порядка на производствах, где чистота имеет решающее значение для производства качественной продукции.
Существуют также специализированные услуги клининга, которые должны выполняться с учетом всех необходимых мер безопасности. Этот тип клининга необходим для удаления строительной пыли и грязи, которая должна быть удалена для создания чистой и комфортной среды.
Другой тип специализированного клининга — это уборка после загрязнений, которая требует использования специального оборудования и средств . Этот тип клининга необходим для поддержания чистоты и безопасности помещений, где произошло загрязнение .
В заключение, клининг — это важнейший процесс, который требует тщательного подхода и внимания к деталям . Этот процесс необходим для поддержания чистоты и порядка в различных учреждениях и домах, где чистота является важнейшим фактором комфорта. Клининг может быть выполнен как руками, применяя современные технологии и оборудование , и профессиональными уборщиками и клининговыми компаниями, которые имеют опыт и навыки в этой области .
Если вы ищете надежную и долговечную альтернативу одноразовым электронным сигаретам, то купить подик станет отличным вариантом для тех, кто ценит качество и долголетие своего устройства.
стали очень популярными среди курильщиков благодаря своей эффективности и экономической выгоде. Они предоставляют возможность любителям никотина наслаждаться различными вкусами и позволяют регулировать количество никотина. Эти устройства могут использоваться в течение длительного времени и не требуют частой замены .
Многоразовые электронные сигареты отличаются от одноразовых устройств наличием нескольких преимуществ, включая возможность заряжать батарею несколько раз . Это уменьшает количество мусора и делает их более экологически чистыми . Помимо этого, имеют более длительный срок эксплуатации, что снижает затраты на долгосрочную перспективу.
При выборе многоразовой электронной сигареты важно?? несколько аспектов, включая вид батареи . Некоторые устройства имеют встроенные батареи , в то время как другие имеют возможность замены батареи . Это может иметь значение для пользователей, которые желают иметь больше вариантов.
Стоимость устройства также играет важную роль при выборе многоразовой электронной сигареты. Определенные варианты могут быть довольно дорогими, в то время как другие предоставляют более доступный вариант . Пользователи должны взвесить все за и против и выбрать устройство, которое соответствует их потребностям .
Многоразовые электронные сигареты обладают рядом достоинств по сравнению с традиционными сигаретами. Они не содержат большого количества вредных химических веществ, которые находятся в табачных изделиях. Это делает их более безопасными для здоровья и уменьшает воздействие на окружающую среду.
Помимо этого, многоразовые электронные сигареты могут помочь курильщикам снизить уровень никотина, что может быть полезно для их благополучия . Они также allow курильщикам контролировать уровень никотина , что может быть особенно полезно для тех, кто хочет сократить потребление никотина .
В заключении, многоразовые электронные сигареты могут быть хорошей альтернативой традиционным сигаретам. Они обладают рядом достоинств, включая возможность регулировать количество никотина , снижение затрат и меньшее количество отходов . Пользователям следует учитывать свои потребности и выбрать устройство, которое соответствует их бюджету .
Lumina Solar PA is known as the top solar panel installation company providing services to the Pottstown,
Pennsylvania area. Pottstown, located at approximately 40.2456° N latitude and -75.6495°
W longitude, has a population of around 23,000 residents, with
a expanding interest in sustainable energy solutions.
Lumina Solar PA capitalizes on this demographic insight, offering bespoke solar installations to meet the needs of both residential and commercial customers in this community.
The region experiences an average of 4.5 peak
sun hours per day, making solar energy a viable and productive option. Lumina Solar PA’s expertise ensures ideal panel
placement and system design to maximize these sunlight conditions.
Pottstown is near key points of interest such as the Schuylkill River Trail and Montgomery County
Community College, locations where environmental consciousness
is increasing. Serving this area, Lumina Solar PA provides
eco-friendly solar solutions that align with local values.
Their knowledge of Pennsylvania’s solar incentives and net metering policies also benefits customers,
increasing the financial returns of solar investments.
Lumina Solar PA’s commitment to quality and local expertise makes them the preferred choice for solar energy in the
Pottstown region.
Look into my web blog :: Evoplay Games – Play for real Money
После вашего букета в доме как будто стало светлее и уютнее. Цветы действительно преображают пространство и дарят положительную энергию.
кустовые розы купить в томске
горшок с автополивом белый http://www.kashpo-s-avtopolivom-spb.ru .
Whoa all kinds of valuable tips!
You mentioned that very well.
Нужна презентация? сделать презентацию через нейросеть Создавайте убедительные презентации за минуты. Умный генератор формирует структуру, дизайн и иллюстрации из вашего текста. Библиотека шаблонов, фирстиль, графики, экспорт PPTX/PDF, совместная работа и комментарии — всё в одном сервисе.
По приходу товара я выложу тут розничную площадку для заказов, на которой вы сможете заказать реактивы из наличия на складе, не уточняя у нас что есть…
Приобрести MEF GASH SHIHSKI ALFA — ОТЗЫВЫ, ГАРАНТРР, КАЧЕСТВО
продавец отзывчивый
Закладки тут — купить гашиш, мефедрон, альфа-РїРІРї
помоему рти 111 это вообще фэйк и под этим названием онли нелегал толкают, лично мне приходило от 3х продавцов и у всех нелегал, то МДПВ аналог, то амфа
Магазин 24/7 — купить закладку MEF GASH SHIHSKI
Можно позвонить в СПСР, у них там даётся полная инфа по треку, по телефону. Где чё лежит. Если не написано в ленте… Завтра звякну, отпишу, если не появится.
Приобрести MEF GASH SHIHSKI ALFA — ОТЗЫВЫ, ГАРАНТРР, КАЧЕСТВО
продолжайте работу в таком же духе. клады всегда целые и надежные, что очень радует!
Приобрести онлайн кокаин, мефедрон, гашиш, бошки
в трубку после затяга уже чвствуеца
Приобрести онлайн кокаин, мефедрон, гашиш, бошки
непонимающий человек, были сложности в работе курьера сейчас все в порядке.
Приобрести MEF GASH SHIHSKI ALFA — ОТЗЫВЫ, ГАРАНТРР, КАЧЕСТВО
Товар привезли качество удовлетворительное,единственное что заказ долго оформляли не мог достучаться в асю.А так все норм!=))
Магазин 24/7 — купить закладку MEF GASH SHIHSKI
Отдельное спасибо курьеру! Тактичный, вежливый и с самыми добрыми пожеланиями. Создаётся ощущение, что вы доставляете не просто цветы, а частичку добра.
купить 101 розу в томске
Also visit my web blog :: online poker sites
888B com
8S
You actually reported it perfectly!
Cleaning Service Amsterdam-Centrum is extensively experienced in workplace cleaning services in Nieuwendam, Amsterdam.
Nieuwendam, positioned at approximately 52.402°N latitude and 4.898°E longitude,
is a lively neighborhood with a mix of residential and commercial properties.
With a population density of around 3,200 people per square kilometer and a variety of small to medium-sized enterprises, maintaining hygiene
and cleanliness in offices is essential. Cleaning Service Amsterdam-Centrum
appreciates the importance of supporting this diverse business community, which includes financial services, creative agencies, and retail outlets.
Key points of interest near Nieuwendam, such as the Nieuwendammerdijk waterfront and several
business parks, require tailored cleaning approaches that
Cleaning Service Amsterdam-Centrum skillfully provides. Their personalized cleaning schedules match peak office hours and local business
operations, ensuring minimal disruption. The demographic
profile of Nieuwendam, with a significant proportion of professionals aged 25-45,
requires a high standard of cleanliness to
enhance productivity and health. Cleaning Service Amsterdam-Centrum leverages their deep knowledge
of Nieuwendam’s commercial landscape to deliver excellent office cleaning, enhancing
workplace environments and meeting the specific needs of
this Amsterdam district.
Вообщем маска (конспирация) на высоком уровне, что на прямую влияет на мою безопасность и на тех кто пользуется услугами данного ТС, это радует.
Закладки тут — купить гашиш, мефедрон, альфа-РїРІРї
какой выход с 1г ?
Онлайн магазин — купить мефедрон, кокаин, бошки
Магазин агонь! Брал как то давно. все ровно!
Онлайн магазин — купить мефедрон, кокаин, бошки
https://moshna-spb.ru
https://oplotspb.ru
https://strix-crmp.ru
https://alfa17.ru
https://picksto.ru
Wonderful info, Thanks.
whoah this weblog is excellent i really like
reading your posts. Keep up the great work! You already know,
a lot of people are hunting round for this info, you could
help them greatly.
заказать металлические значки со своим дизайном значки на заказ цена
кашпо для цветов напольное уличное пластиковое купить http://www.ulichnye-kashpo-kazan.ru/ .
https://imageevent.com/ofusidirowap/exsxk
https://imageevent.com/chayadamore7/evlda
https://anyflip.com/homepage/gjhdx
https://yamap.com/users/4853468
https://imageevent.com/jefferson18m/vdgrh
https://yamap.com/users/4850681
https://imageevent.com/adellewill4/tjazu
https://yamap.com/users/4853435
https://imageevent.com/krewkrause/elorr
https://www.divephotoguide.com/user/siigicpu
https://anyflip.com/homepage/qzsdp
https://pubhtml5.com/homepage/pmzpe
При необходимости срочной транспортировки автомобиля эвакуатор москва недорого может оказаться очень полезным.
средство для транспортировки машин в случае необходимости с одного места на другое. Он используется для перемещения автомобилей, которые были припаркованы с нарушением правил . Эвакуатор состоит из специальной платформы и механизма для закрепления автомобилей .
Эвакуатор используется в случаях, когда автомобиль припаркован в неположенном месте . Он позволяет эффективно решать проблемы, связанные с неправильной парковкой . Эвакуатор управляется квалифицированными водителями .
Существует множество моделей эвакуаторов, каждая со своими особенностями. Эвакуаторы различаются по типу используемого двигателя . Некоторые эвакуаторы могут использоваться для перемещения большегрузных автомобилей.
Эвакуаторы оборудованы системами для контроля процесса эвакуации. Они могут быть использованы в различных условиях, включая ночное время. Эвакуаторы разработаны с учетом требований к экологической безопасности .
Эвакуаторы применяются в службе дорожного движения для решения проблем, связанных с неправильной парковкой . Они помогают поддерживать порядок и безопасность на дорогах . Эвакуаторы взаимодействуют с компаниями, предоставляющими услуги по ремонту и обслуживанию автомобилей .
Эвакуаторы помогают уменьшить количество аварий и инцидентов на дорогах. Они работают в любых погодных условиях . Эвакуаторы представляют собой важнейший элемент системы обеспечения безопасности и порядка на дорогах .
Эвакуатор — это важнейший инструмент для поддержания порядка на дорогах . Он позволяет быстро и безопасно решать проблемы, связанные с неправильной парковкой или авариями . Эвакуатор оснащен современным оборудованием, соответствующим высоким стандартам качества и безопасности .
Эвакуатор сочетает в себе надежность, эффективность и безопасность. Он необходим для поддержания порядка и безопасности на дорогах . Эвакуатор будет продолжать оставаться важнейшим элементом городской инфраструктуры .
https://www.brownbook.net/business/54329213/волоколамск-купить-кокаин/
https://imageevent.com/harrystent01/jjlyj
https://www.montessorijobsuk.co.uk/author/tahybahn/
https://imageevent.com/mcglynnvicen/qbyav
https://www.brownbook.net/business/54330020/васильевка-купить-кокаин/
https://www.impactio.com/researcher/tazrodugit
https://www.grepmed.com/uceagehacd
https://imageevent.com/ashabashiria/rvoyx
https://vocal.media/authors/kupit-kokain-saryagash
My web page; pokertube — Watch free Poker Videos & tv shows
https://anyflip.com/homepage/lvrcg
https://pubhtml5.com/homepage/zclch
Ваш пост про розы с доставкой в офис спас мою репутацию — начальница оценила такой внимательный жест в ее день рождения!
купить пионы томск
https://anyflip.com/homepage/iukpc
https://yamap.com/users/4853473
https://anyflip.com/homepage/trsdq
https://pubhtml5.com/homepage/cupgs
https://anyflip.com/homepage/qieqc
https://www.montessorijobsuk.co.uk/author/efquibza/
https://yamap.com/users/4853476
https://pubhtml5.com/homepage/zwbtm
https://bio.site/ihrohacuh
https://pubhtml5.com/homepage/aoila
https://imageevent.com/aliyagrrtt/wjnsc
https://pubhtml5.com/homepage/gkkdt
https://www.divephotoguide.com/user/egeugxaci
https://anyflip.com/homepage/icghy
https://hoo.be/qycteocyhihe
Спасибо за пост про розы для первого свидания! Заказала для дочери — молодой человек был приятно впечатлен!
доставка цветов в томске
https://imageevent.com/aliceo73049/lyceo
https://www.band.us/page/100105283/
https://www.montessorijobsuk.co.uk/author/yhaoaefuybid/
Розы пахнут так, как должны пахнуть настоящие розы! Насыщенный и сладкий аромат. Спасибо за качество и заботу о свежести продукции.
купить розы Томск
https://imageevent.com/ojipameriquq/mqijh
https://imageevent.com/fweems3/xccor
https://85a5e5f35a032ca0864a45e8cb.doorkeeper.jp/
https://pubhtml5.com/homepage/rbvca
https://form.jotform.com/252703626774058
https://pubhtml5.com/homepage/abcte
https://anyflip.com/homepage/vzoid
https://anyflip.com/homepage/kezpw
https://bio.site/afudidao
https://imageevent.com/puceingars/xkrls
https://imageevent.com/idsmeijers/jivef
https://allmynursejobs.com/author/fosterbrian1160/
https://pubhtml5.com/homepage/yppzn
https://anyflip.com/homepage/dutxt
https://anyflip.com/homepage/lkkuo
https://cf433e39578cb4feadb3f45ca6.doorkeeper.jp/
https://anyflip.com/homepage/hebhb
https://allmynursejobs.com/author/mcphersonjason5502/
https://anyflip.com/homepage/mlfty
https://pxlmo.com/eptssrgt566
https://www.brownbook.net/business/54329217/купить-кокаин-звенигород/
https://kemono.im/gehsyhmihiof/viaz-ma-kupit-kokain
https://pubhtml5.com/homepage/lfkqf
Для заказа оборудования для бурения и цементирования скважин необходимо купить цементировочный агрегат на урал, который применяется в процессе цементирования скважин для закрепления обсадных труб и изоляции пластов.
важнейшее оборудование для строительства и реконструкции зданий . Они используются в процессе возведения новых зданий и ремонта старых . При выборе цементировочного агрегата важно помнить о надежности и долговечности оборудования.
Цементировочные агрегаты предназначены для эффективного и быстрого нанесения цементных смесей . Они используются для создания прочных оснований . При этом важно правильно выбрать цементировочный агрегат .
Преимущества цементировочных агрегатов
Использование цементировочных агрегатов обеспечивает экономию времени и средств . Они выполняют работу быстрее и более эффективно . При этом следует правильно обслуживать и эксплуатировать оборудование.
Цементировочные агрегаты используются для выполнения различных задач . Они обеспечивают высокое качество и долговечность . При этом важно обратить внимание на технические характеристики .
Основные типы цементировочных агрегатов
Существует несколько основных типов цементировочных агрегатов . Они имеют разные размеры и производительность . При этом необходимо учитывать все факторы .
Цементировочные агрегаты используются для создания прочных и долговечных сооружений . Они выполняют функцию нанесения цементных растворов . При этом следует заранее определить объем работ и необходимую производительность.
Заключение и рекомендации
При покупке цементировочного агрегата следует правильно обслуживать и эксплуатировать оборудование. Цементировочные агрегаты выполняют функцию нанесения цементных растворов с высокой точностью. При этом важно обратить внимание на технические характеристики .
Цементировочные агрегаты используются для выполнения различных строительных задач . Они обеспечивают долгую службу без необходимости частого ремонта. При этом следует заранее определить объем работ и необходимую производительность.
https://www.band.us/page/100116258/
https://anyflip.com/homepage/mxyjf
https://imageevent.com/bernhardt2r4/tpxop
https://muckrack.com/person-28187610
https://anyflip.com/homepage/shwiy
https://form.jotform.com/252692991072061
https://allmynursejobs.com/author/cranmexank28/
https://www.grepmed.com/aboubxpnbh
https://anyflip.com/homepage/opgoi
https://imageevent.com/panchenckosv/flwtl
https://www.grepmed.com/ucofbibo
https://imageevent.com/udao8324/snwvu
Для жителей северной столицы теперь доступна профессиональная уборка квартиры цена, выполняемая высококвалифицированным персоналом.
Уборка квартир в Санкт-Петербурге является важнейшим аспектом содержания жилого пространства в порядке. Это связано с тем, что регулярная уборка квартир является ключом к созданию уютной и комфортной среды.
https://muckrack.com/person-28187564
https://669c9b3b30d94e8b03bb75e0c4.doorkeeper.jp/
https://muckrack.com/person-28187176
https://imageevent.com/strackeporte/aglfw
https://anyflip.com/homepage/drpri
https://pubhtml5.com/homepage/mwcrl
https://kemono.im/fofybooe/liverpul-kupit-kokain
https://imageevent.com/gracehintz56/tkrqj
https://imageevent.com/ramseypiper2/kciqa
https://pubhtml5.com/homepage/wbqxc
https://wirtube.de/a/zoqcezogof/video-channels
https://anyflip.com/homepage/lcjfe
https://imageevent.com/dickinsonaly/gzptc
https://form.jotform.com/252686104953058
Sodo88
https://muckrack.com/person-28163045
https://pubhtml5.com/homepage/noxda
https://anyflip.com/homepage/rrqui
https://www.divephotoguide.com/user/odehubmo
https://vocal.media/authors/shali-kupit-kokain
https://bio.site/zofaohycea
https://imageevent.com/fritscharnol/avtil
mexican steroids for sale
References:
best steroids for athletes — https://www.propose.lk/@tamelawhitely1 —
https://pubhtml5.com/homepage/mxpux
https://www.impactio.com/researcher/txugdqpd4775
Для создания по-настоящему незабываемых фотографий в Москве, воспользуйтесь услугами вика маркина, где опыт и креативность гарантируют вам действительно уникальные и запоминающиеся снимки.
Фотографы Москвы известны своим высоким профессионализмом и творческим подходом. С развитием технологий и появлением новых камер и программных средств возможности фотографии расширились Мировые тенденции в фотографии находят своё отражение в творчестве многих московских фотографов . Фотограф в Москве может предложить широкий спектр услуг от семейных фотосессий до сложных коммерческих проектов .
Фотография в Москве развивается с каждым днём новые студии и фотографические лаборатории открываются в городе . Фотографы в Москве часто принимают участие в различных выставках и конкурсах для обмена новыми идеями и изучения творческих решений . Уровень конкуренции между фотографами в Москве достаточно высок каждый фотограф??тается создать свой уникальный и узнаваемый стиль .
Фотограф в Москве должен соответствовать определённым требованиям уметь работать с различным оборудованием и программным обеспечением . Одним из ключевых навыков фотографа является умение работать с людьми уметь вдохновить модель и получить от нее желаемое выражение. Кроме того, фотограф в Москве должен быть знаком с редакторским программным обеспечением чтобы иметь возможность редактировать и ретушевать фотографии до необходимого уровня качества.
Работа фотографа в Москве постоянно совершенствуется фотограф должен быть готов учиться и адаптироваться к новым условиям . Фотограф в Москве также должен быть организованным и способным управлять своим временем планировать и организовывать фотосессии, включая выбор мест и координацию с моделями . Профессиональный фотограф в Москве всегда стремится к совершенству анализируя работу других фотографов и изучая их техники .
В Москве можно найти фотографов, специализирующихся на различных видах фотографии от портретной и свадебной до модной и документальной . Портретная фотография в Москве особенно популярна включая классические и современные стили. Свадебная фотография также очень востребована и могут создать красивые и незабываемые фотографии этого??ного дня.
Модная фотография в Москве представлена множеством талантливых фотографов и создают яркие и привлекающие внимание фотографии . Фотограф в Москве может также предложить услуги по коммерческой фотографии и может помочь компании создать профессиональный и привлекательный имидж. Документальная фотография в Москве также развивается потому что люди хотят запечатлеть важные события и моменты своей жизни .
Фотограф в Москве — это высококвалифицированный специалист который может предложить широкий спектр услуг по фотографии . Выбрать хорошего фотографа в Москве сегодня не составляет особого труда потому что в городе работает множество талантливых фотографов . Фотограф в Москве может стать настоящим помощником и помочь клиенту запечатлеть важные моменты его жизни .
Профессиональный фотограф в Москве готов предложить вам уникальные услуги, включая фотограф виктория.
Среди большого количества фотографов выбрать подходящего бывает нелегко
steroid post cycle treatment
References:
some examples of steroids are shown here. (https://git.successkaoyan.com/charolettefral)
На сайте фотосессию в стиле ню вы можете заказать услуги профессионального фотографа в Москве.
самые яркие моменты жизни в столице России. Профессиональный фотограф в Москве поможет создать удивительные и неповторимые снимки . Фотосессия может проходить в различных локациях, от природных пейзажей до городских улиц .
Фотография — это не только запечатление моментов, но и искусство создания незабываемых впечатлений. Фотограф в Москве, имеющий большой опыт работы и разнообразный портфолио , может предложить создание фотографий, отражающих личность и стиль клиента.
Существует широкий спектр фотосессий, от классических портретов до модных фотосъемок . Фотосессия для создания семейного альбома или индивидуального портфолио требует определенного подхода и стиля .
Фотограф в Москве, специализирующийся на создании фотографий для рекламы,.editorials или каталогов, может предложить высокое качество фотографий и профессиональную обработку . Фотосессия может быть спонтанной и непредсказуемой или тщательно спланированной .
Подготовка к фотосессии — это необходимый процесс, включающий выбор локации, одежды и стиля . Фотограф в Москве поможет определить цель и задачи фотосессии .
Фотосессия может быть проводиться в различных режимах, от расслабленного и игривого до официального и делового. Фотограф в Москве, имеющий большой опыт работы с клиентами , может предложить индивидуальный подход и персонализированную поддержку .
Результат фотосессии — это уникальные и незабываемые фотографии . Фотограф в Москве, имеющий большой опыт и высокий уровень мастерства , может предложить высокое качество фотографий и профессиональную обработку .
Фотосессия в Москве — это уникальный шанс создать удивительные и неповторимые фотографии . Фотограф в Москве поможет запечатлеть самые значимые даты и события.
it is usually permanent.
References:
names of steroids for muscle growth (https://soundcashmusic.com/karolynoki212)
anabolic steroid types
References:
legal steroids 2014; https://www.keosukoa.com/code/dustylyke0798,
alpha cuts advanced cutting agent
References:
new muscle stack gnc (https://zerfoon.com/read-blog/19_anavar-outcomes-before-amp-after-pics-week-by-week.html)
https://www.band.us/page/100115052/
what is a legal steroid for muscle building
References:
steroid online shop (https://winnisp.ru/alphonsofranco)
https://www.montessorijobsuk.co.uk/author/ohsuofehug/
https://imageevent.com/pacochakrist/wvaui
https://anyflip.com/homepage/htjbg
https://imageevent.com/gzepyjobaw/idfse
https://anyflip.com/homepage/ejswz
https://anyflip.com/homepage/rcvqz
https://anyflip.com/homepage/ljjwa
https://www.grepmed.com/racugeedidy
Cheers. A lot of postings!
https://imageevent.com/vlasovsmedar/bjxgz
https://imageevent.com/geqorymejofi/yasqx
https://imageevent.com/florencewell/zyecc
https://pubhtml5.com/homepage/uffbq
https://vocal.media/authors/staraya-kupavna-kupit-kokain
https://wirtube.de/a/bhmfklwi8489/video-channels
http://www.pageorama.com/?p=vycyduafecab
https://www.brownbook.net/business/54330019/каменск-шахтинский-купить-кокаин/
https://pubhtml5.com/homepage/yidzb
บทความนี้ อ่านแล้วได้ความรู้เพิ่ม ครับ
ดิฉัน ได้อ่านบทความที่เกี่ยวข้องกับ ข้อมูลเพิ่มเติม
สามารถอ่านได้ที่ Boyce
สำหรับใครกำลังหาเนื้อหาแบบนี้
มีการสรุปเนื้อหาไว้อย่างดี
ขอบคุณที่แชร์ คอนเทนต์ดีๆ นี้
และหวังว่าจะได้เห็นโพสต์แนวนี้อีก
https://anyflip.com/homepage/alyos
Заказывала розы для себя, просто чтобы поднять настроение. И это сработало! Теперь я знаю, что лучшая инвестиция – в свои собственные эмоции.
51 роза томск купить
https://pixelfed.tokyo/jeffrey.harris01081965wfa
https://pubhtml5.com/homepage/niohb
https://imageevent.com/arnehedegaar/qjdpq
https://imageevent.com/iopukisunyb/tqxiu
https://3f20f720bdb1a8b3ec25f00cdc.doorkeeper.jp/
https://imageevent.com/ldezuxesazom/guwfu
https://imageevent.com/pavery014/njyty
https://yamap.com/users/4853440
http://www.pageorama.com/?p=xebehqaaubqa
https://imageevent.com/francisca_qu/qrwwx
https://form.jotform.com/252702672199059
Thanks a lot! Loads of data!
https://pixelfed.tokyo/charles.king18011976mi
https://pubhtml5.com/homepage/qhtim
https://imageevent.com/belenrosaonl/bjook
https://www.divephotoguide.com/user/ebueygpi
https://pubhtml5.com/homepage/qifsc
https://anyflip.com/homepage/vyzed
https://bio.site/wyguceba
https://www.grepmed.com/acayiobyc
https://imageevent.com/staporylclea/ggbve
https://pubhtml5.com/homepage/pmryv
https://www.grepmed.com/fegacmvi
https://imageevent.com/krewkrause/elorr
https://anyflip.com/homepage/sqtvt
https://imageevent.com/lakosadony/opvoz
https://8d18c1785cff81208785ffd7fd.doorkeeper.jp/
Для тех, кто столкнулся с проблемой поломки автомобиля в столице, эвакуатор авто предоставляет оперативные и надежные услуги по перевозке транспортных средств, гарантируя безопасность и быстрое решение проблемы.
Эвакуация автомобилей в столице является??ой услугой для многих . Это связано с тем, что в городе часто встречаются ситуации, когда автомобильNeeds эвакуации из-за поломки, ДТП или других непредвиденных обстоятельств транспортное средство может потребовать эвакуации в случае поломки или других проблем. В таких случаях услуги эвакуатора становятся просто незаменимыми эвакуация автомобиля может быть единственным вариантом в случае его неисправности .
Компании, предоставляющие услуги эвакуатора в Москве, работают круглосуточно, что позволяет водителям получить помощь в любое время услуги эвакуатора в Москве доступны круглосуточно для всех водителей. Это особенно важно в случае неожиданных поломок или аварий, когда каждая минута на счету когда автомобиль.requires срочной эвакуации, каждая минута имеет решающее значение. Благодаря услугам эвакуатора, водители могут не беспокоиться о том, как добраться до места назначения или как справиться с неисправным транспортным средством услуги эвакуатора позволяют водителям не беспокоиться о последствиях поломки или аварии .
Услуги эвакуатора в Москве включают в себя широкий спектр услуг, начиная от простой эвакуации автомобиля до более сложных операций услуги эвакуатора в Москве охватывают широкий перечень услуг для автомобилистов. Одним из наиболее популярных видов услуг является эвакуация автомобиля в случае его поломки или неисправности услуги эвакуатора по ремонту автомобиля пользуются большим спросом . Кроме того, существуют услуги по эвакуации автомобилей,involved в ДТП эвакуация автомобиля после аварии является важной услугой .
Компании, предоставляющие услуги эвакуатора в Москве, также предлагают услуги по доставке автомобиля в назначенное место компании, оказывающие услуги эвакуатора, предлагают услуги по доставке автомобиля . Это может быть особенно полезно для водителей, которым необходимо доставить свой автомобиль в сервисный центр или на стоянку для доставки автомобиля в назначенное место услуги эвакуатора являются наиболее подходящим решением . Кроме того, некоторые компании предлагают услуги по техническому обслуживанию и ремонту автомобилей услуги эвакуатора могут включать в себя ремонт автомобиля .
Услуги эвакуатора в Москве имеют множество преимуществ для водителей эвакуаторные услуги в столице имеют ряд преимуществ . Одним из основных преимуществ является возможность получения помощи в любое время и в любом месте эвакуаторные услуги обеспечивают помощь водителям в?? ситуации. Это особенно важно для водителей, которые часто находятся в пути и могут столкнуться с неожиданными проблемами услуги эвакуатора становятся спасением для водителей, которые часто находятся в пути .
Кроме того, услуги эвакуатора в Москве могут помочь водителям сэкономить время и деньги эвакуаторные услуги в столице предлагают экономически эффективные решения для водителей . В случае поломки или аварии, услуги эвакуатора могут помочь доставить автомобиль в сервисный центр или на стоянку, что может предотвратить дальнейшее повреждение и сократить расходы на ремонт услуги эвакуатора позволяют доставить автомобиль в место ремонта, что может сократить расходы на обслуживание .
В заключении, услуги эвакуатора в Москве являются необходимыми для многих водителей эвакуаторные услуги в столице имеют большое значение для водителей . Благодаря услугам эвакуатора, водители могут получить помощь в любое время и в любом месте, что может помочь им сэкономить время и деньги услуги эvакуатора в Москве являются экономически эффективными и позволяют водителям получить необходимую помощь. При выборе компании, предоставляющей услуги эвакуатора, важно учитывать такие факторы, как опыт, квалификация и стоимость услуг при выборе компании, оказывающей услуги эвакуатора, важно учитывать такие факторы, как опыт и квалификация сотрудников .
https://pubhtml5.com/homepage/wmxjf
https://www.brownbook.net/business/54330172/купить-кокаин-ликино-дулёво/
https://anyflip.com/homepage/xoklla
https://imageevent.com/hermodsahlst/cnzae
https://pubhtml5.com/homepage/ywnjl
https://www.montessorijobsuk.co.uk/author/idaagioficuf/
https://kemono.im/edodyheu/kupit-kokain-izobil-nyi
parabolan steroids
References:
https://lorentzen-abdi.hubstack.net/anadrol-cycling-101-the-ultimate-how-to-manual
Приобрести MEF GASH SHIHSKI ALFA — ОТЗЫВЫ, ГАРАНТРР, КАЧЕСТВО
winstrol weight gain
References:
https://pad.stuve.uni-ulm.de/qB5Ekfw0SM6HkEC1G5-jqw/
Feel free to visit my webpage: Live Poker Online
Магазин 24/7 — купить закладку MEF GASH SHIHSKI
Закладки тут — купить гашиш, мефедрон, альфа-РїРІРї
anabolic steroid injectable for sale
References:
Dbol Cutting — https://orailo.com/@keeley64033701,
Магазин 24/7 — купить закладку MEF GASH SHIHSKI
Букет был таким ярким и свежим, что казалось, он светится изнутри. Спасибо за кусочек солнца в хмурый день.
розы в Томске
Онлайн магазин — купить мефедрон, кокаин, бошки
arnold schwarzenegger steroid
References:
is testosterone a steroid (https://music.elpaso.world/leilanidjd0528)
Приобрести MEF GASH SHIHSKI ALFA — ОТЗЫВЫ, ГАРАНТРР, КАЧЕСТВО
Онлайн магазин — купить мефедрон, кокаин, бошки
Закладки тут — купить гашиш, мефедрон, альфа-РїРІРї
Закладки тут — купить гашиш, мефедрон, альфа-РїРІРї
Приобрести онлайн кокаин, мефедрон, гашиш, бошки
Быстрая доставка траурных букетов!Тактично!
доставка цветов
I do not know whether it’s just me or if perhaps everyone else encountering problems with your
site. It appears like some of the written text within your content
are running off the screen. Can somebody else
please provide feedback and let me know if this is happening to
them as well? This might be a issue with my browser because I’ve
had this happen before. Cheers
Hello! Do you use Twitter? I’d like to follow you if that would be okay.
I’m undoubtedly enjoying your blog and look forward to new updates.
I blog quite often and I really thank you for your content.
The article has really peaked my interest. I will book mark
your blog and keep checking for new information about once
a week. I subscribed to your Feed as well.
After I initially left a comment I appear to have clicked on the -Notify me when new comments are added- checkbox and from
now on every time a comment is added I recieve four emails with the exact same
comment. There has to be a way you can remove me from that service?
Appreciate it!
If you need a phone number for one-time registration or verification, consider using 7sim, которые могут помочь в решении проблемы получения сообщений.
enabling efficient communication without hefty price tags. With the rise of virtual phone systems, it has become easier than ever to obtain a free phone number . the adoption of free phone numbers has grown substantially, driven by the need for cost savings .
The concept of free phone numbers has been around for several years, but it has gained popularity in recent times . the key driver of this growth is the technological advancements that have made it feasible to offer free phone numbers with excellent service. free phone numbers have emerged as a viable option for startups, small businesses, and individuals who want to save on their phone bills.
Free phone numbers offer a range of benefits, including cost savings, increased flexibility, and improved customer service . By using a free phone number, businesses can reduce their monthly phone bills, allocate resources more efficiently, and enhance their overall financial performance . Moreover, free phone numbers can be easily integrated with existing phone systems, enabling smooth communication and reducing downtime . This has made free phone numbers an essential tool for businesses that rely heavily on phone communications, such as customer service centers and sales teams .
In addition to the cost savings, free phone numbers also offer increased flexibility, enabling companies to handle their communications remotely, without being tied to a specific location . This is particularly useful for businesses with remote teams or those that operate in multiple time zones . Furthermore, free phone numbers can be easily scaled up or down, in line with the fluctuating demands of the organization. this makes them a viable option for businesses that face variations in call volume or have cyclical changes in their operations.
Getting a free phone number is a relatively simple process, entailing a few uncomplicated steps and negligible administrative tasks. The first step is to select a trustworthy provider that offers free phone numbers, considering aspects such as voice quality, customer service, and functionality . Once a provider is chosen, the next step is to register for an account, which normally entails providing essential information such as name, email address, and password. After completing the sign-up process, users can normally pick their preferred free phone number from a variety of available numbers.
Some providers may also offer additional features, such as call forwarding, voicemail, and call recording, which can be useful for businesses and individuals . These features can improve the usability of the free phone number, making it more practical for handling communications . It is essential to carefully evaluate the terms and conditions of the provider, including any usage caps or prohibitions. This will help ensure that the free phone number fulfills the expectations of the business or individual, without any unpleasant surprises.
In conclusion, free phone numbers have become an essential tool for businesses and individuals, providing a budget-friendly alternative for phone services . As technology continues to evolve, it is expected that free phone numbers will become more refined, with supplementary features and increased effectiveness. This will make them even more attractive to businesses and individuals, who are looking for ways to reduce their communication costs .
The future of free phone numbers looks exciting, with the prospect of even more advanced features and functionalities. As the demand for free phone numbers continues to grow, providers will need to adapt and innovate, delivering more refined features and enhanced customer care. This will drive the development of new technologies and services, further expanding the capabilities of free phone numbers . Ultimately, the widespread adoption of free phone numbers will transform the way businesses and individuals communicate, facilitating more streamlined and budget-friendly communications .
Невероятно нежные гиацинты!Весеннее настроение!
купить цветы томск
If you are going for most excellent contents like I do, simply pay a quick visit
this web site all the time as it provides feature contents, thanks
Appreciate the recommendation. Will try it out.
Ваши советы в соцсетях по сочетанию роз с другими цветами помогли собрать идеальный букет на юбилей родителей!
букет невесты
https://chudesa5.ru
https://barcelona-stylist.ru
https://bargrill-myaso.ru
https://actpsy.ru
https://azhku.ru
https://epcsoft.ru
https://antei-auto.ru
https://autovolt35.ru
https://aliden.ru
https://klinika-siti-center.ru
https://advokatpv.ru
https://barcelona-stylist.ru
Профессиональный фотограф в Москве готов предложить вам уникальные услуги, включая фотосессия для мужчин в москве.
Рекомендуется обратить внимание на портфолио и репутацию фотографа, чтобы быть уверенным в результате
https://bargrill-myaso.ru
Как хорошо, что вы ведете прямые эфиры с флористами! Узнала много полезного и заказала идеальные розы на 8 Марта!
заказ цветов томск
https://antei-auto.ru
https://bargrill-myaso.ru
https://albummarket.ru
https://banket-kruzheva71.ru
https://chudesa5.ru
https://bibikey.ru
https://arhmicrozaim.ru
https://aliden.ru
https://al-material.ru
Это мой уже третий заказ, и каждый раз вы превосходите сами себя! Качество роз всегда на высочайшем уровне. Поистине королевский подарок.
розы томск
https://epcsoft.ru
Быстрая доставка вечером!Удобно для сюрприза!
цветы
https://autovolt35.ru
https://arhmicrozaim.ru
https://albummarket.ru
https://fermerskiiprodukt.ru
https://chi-borchi.ru
https://bargrill-myaso.ru
https://autovolt35.ru
https://advokatpv.ru
https://avokado22.ru
https://alaziza.ru
https://fermerskiiprodukt.ru
https://autovolt35.ru
https://barcelona-stylist.ru
https://chudesa5.ru
https://barcelona-stylist.ru
https://arhmicrozaim.ru
Hello There. I found yourr blog using msn. This is a very
well written article. I’ll be sure to bookmark it and return to read
more of your useful information. Thanks foor the post. I will certainly comeback.
My web-site bathroom Remodel Services
https://altekproekt.ru
https://actpsy.ru
https://bargrill-myaso.ru
https://bibikey.ru
https://fermerskiiprodukt.ru
https://fdcexpress.ru
https://chi-borchi.ru
https://chudesa5.ru
https://chudesa5.ru
https://fermerskiiprodukt.ru
how does trenbolone work
References:
https://www.generation-n.at/forums/users/mankey09/
https://khasanovich.ru
https://faizi-el.ru
steroid results before and after
References:
https://mycoalitionu.org/forums/users/peppermilk2/edit
cjc-1295/ipamorelin side effects
References:
https://www.libertyballers.com/users/valentine.hwa
https://altekproekt.ru
https://bibikey.ru
https://barcelona-stylist.ru
strongest natural bodybuilder
References:
https://www.celticsblog.com/users/mitchel.peter
https://antei-auto.ru
synthol steroid
References:
https://hack.allmende.io/BQ4LWWL5T2-zjszAE53Qpg/
https://antei-auto.ru
crazy bulk amazon
References:
https://mianswer.com/user/agendalamb4
https://azhku.ru
are steroids and testosterone the same thing
References:
https://saveyoursite.date/story.php?title=dianabol-proven-before-and-after-outcomes-optimal-timing-tips-and-essential-safety-guidelines
anabolics for sale
References:
https://md.un-hack-bar.de/zvMvwyz1Q4CyahO-itCF6Q/
https://albummarket.ru
https://bamapro.ru
muscle building steroids for sale
References:
https://md.swk-web.com/P1oA7_66Qv6m1FeBWMNf1A/
Приобрести MEF GASH SHIHSKI ALFA — ОТЗЫВЫ, ГАРАНТРР, КАЧЕСТВО
steroids detransformation
References:
https://sfenglishlessons.com/members/matchlip5/activity/532674/
Закладки тут — купить гашиш, мефедрон, альфа-РїРІРї
Онлайн магазин — купить мефедрон, кокаин, бошки
supplements that get you jacked
References:
https://hangoutshelp.net/user/hipbagel5
anadrol capsules
References:
https://maps.google.cat/url?q=https://endpiano8.bravejournal.net/dianabol-dbol-cycling-optimal-plans-for-both-newbies-and-experienced-users
Приобрести MEF GASH SHIHSKI ALFA — ОТЗЫВЫ, ГАРАНТРР, КАЧЕСТВО
best performance by a human male
References:
https://images.google.ad/url?q=https://www.valley.md/dianabol-cycle-benefits-and-risks
Приобрести онлайн кокаин, мефедрон, гашиш, бошки
Магазин 24/7 — купить закладку MEF GASH SHIHSKI
Приобрести онлайн кокаин, мефедрон, гашиш, бошки
beginner steroid cycle results
References:
https://firsturl.de/SVsmre5
Магазин 24/7 — купить закладку MEF GASH SHIHSKI
Приобрести онлайн кокаин, мефедрон, гашиш, бошки
Закладки тут — купить гашиш, мефедрон, альфа-РїРІРї
bulking testosterone
References:
https://play.ntop.tv/user/brassage2/
Приобрести онлайн кокаин, мефедрон, гашиш, бошки
I every time spent my half an hour to read this blog’s posts all the time along
with a cup of coffee.
Онлайн магазин — купить мефедрон, кокаин, бошки
buy steroids in india
References:
https://www.pensionplanpuppets.com/users/bird.briggs
Для жителей северной столицы теперь доступна профессиональная клининг квартиры, выполняемая высококвалифицированным персоналом.
Уборка квартир в Санкт-Петербурге является важнейшим аспектом содержания жилого пространства в порядке. Это связано с тем, что Для тех, кто ищет услуги по уборке квартир в СПб, важно оценить репутацию и качество работы потенциального поставщика услуг.
Онлайн магазин — купить мефедрон, кокаин, бошки
Закладки тут — купить гашиш, мефедрон, альфа-РїРІРї
Приобрести MEF GASH SHIHSKI ALFA — ОТЗЫВЫ, ГАРАНТРР, КАЧЕСТВО
my page poker Online
Приобрести MEF GASH SHIHSKI ALFA — ОТЗЫВЫ, ГАРАНТРР, КАЧЕСТВО
Приобрести онлайн кокаин, мефедрон, гашиш, бошки
Магазин 24/7 — купить закладку MEF GASH SHIHSKI
Онлайн магазин — купить мефедрон, кокаин, бошки
buying steriods
References:
https://pad.karuka.tech/P-AIg6pyTm2eNcBDiL_S3Q/
Приобрести MEF GASH SHIHSKI ALFA — ОТЗЫВЫ, ГАРАНТРР, КАЧЕСТВО
anabolicsteroids
References:
https://www.blurb.com/user/enddragon10
premier garcinia
References:
https://www.instructables.com/member/parrotpisces93/
Приобрести онлайн кокаин, мефедрон, гашиш, бошки
Онлайн магазин — купить мефедрон, кокаин, бошки
Приобрести MEF GASH SHIHSKI ALFA — ОТЗЫВЫ, ГАРАНТРР, КАЧЕСТВО
Магазин 24/7 — купить закладку MEF GASH SHIHSKI
does legal steroids work
References:
https://images.google.com.pa/url?q=https://www.bitsdujour.com/profiles/Bost5u
Приобрести онлайн кокаин, мефедрон, гашиш, бошки
Закладки тут — купить гашиш, мефедрон, альфа-РїРІРї
Онлайн магазин — купить мефедрон, кокаин, бошки
Магазин 24/7 — купить закладку MEF GASH SHIHSKI
Ваши фото букетов в интерьере офиса вдохновили на заказ роз для украшения рабочего места на Новый год!
купить цветы в томске
Онлайн магазин — купить мефедрон, кокаин, бошки
Приобрести MEF GASH SHIHSKI ALFA — ОТЗЫВЫ, ГАРАНТРР, КАЧЕСТВО
Магазин 24/7 — купить закладку MEF GASH SHIHSKI
Магазин 24/7 — купить закладку MEF GASH SHIHSKI
Закладки тут — купить гашиш, мефедрон, альфа-РїРІРї
Закладки тут — купить гашиш, мефедрон, альфа-РїРІРї
Приобрести MEF GASH SHIHSKI ALFA — ОТЗЫВЫ, ГАРАНТРР, КАЧЕСТВО
purchase legal steroids
References:
https://socialbookmark.stream/story.php?title=rapid-muscle-strength-gains-optimal-dosage-for-a-testosterone-d-bulbocyl-cycle
Приобрести MEF GASH SHIHSKI ALFA — ОТЗЫВЫ, ГАРАНТРР, КАЧЕСТВО
Закладки тут — купить гашиш, мефедрон, альфа-РїРІРї
Онлайн магазин — купить мефедрон, кокаин, бошки
best first time steroid cycle
References:
https://www.asklent.com/user/animeanime80
Онлайн магазин — купить мефедрон, кокаин, бошки
can steroids help you lose weight
References:
https://www.google.com.om/url?q=https://www.giveawayoftheday.com/forums/profile/1248076
Магазин 24/7 — купить закладку MEF GASH SHIHSKI
Приобрести MEF GASH SHIHSKI ALFA — ОТЗЫВЫ, ГАРАНТРР, КАЧЕСТВО
did arnold schwarzenegger use steroids
References:
https://www.udrpsearch.com/user/orchidflat47
anavar cycle for beginners
References:
https://www.google.co.cr/url?q=https://intensedebate.com/people/turtlekettle92
what do steroids do to the body
References:
https://maps.google.com.tr/url?q=https://bookmarkspot.win/story.php?title=dianabol-dbol-cycling-guide-optimal-choices-for-new-and-experienced-users
Закладки тут — купить гашиш, мефедрон, альфа-РїРІРї
which is true regarding anabolic steroids and supplements?
References:
https://pad.hacknang.de/jNyyRJ0wR3W6G2-wuNxt_A/
https://derufa-crimea.ru
โพสต์นี้ น่าสนใจดี ครับ
ผม เพิ่งเจอข้อมูลเกี่ยวกับ ข้อมูลเพิ่มเติม
เข้าไปดูได้ที่ โปรโมชั่น pgslotcash
เผื่อใครสนใจ
เพราะให้ข้อมูลเชิงลึก
ขอบคุณที่แชร์ เนื้อหาที่น่าสนใจ นี้
และหวังว่าจะได้เห็นโพสต์แนวนี้อีก
https://mart-media.ru
decca steroid side effects
References:
https://isowindows.net/user/babytaste2/
https://givotov.ru
https://dent-zubritskiy.ru
https://bostonpub.ru
https://lesbitovok.ru
legal bodybuilding supplements
References:
https://www.google.st/url?q=https://www.giveawayoftheday.com/forums/profile/1248272
https://licey5pod.ru
what side effects can occur from taking anabolic steroids
References:
https://wikimapia.org/external_link?url=https://images.google.com.ly/url?q=https://myspace.com/sleepmilk3
https://edapridiabete.ru
https://eiforiyavkusa.ru
https://ivushka21.ru
winstrol steroids for sale
References:
https://maps.google.cv/url?q=https://www.aseaofblue.com/users/kent.pacheco
https://brelki-vorot.ru
which of the following is a correct description of an anabolic pathway?
References:
https://www.google.fm/url?q=https://bookmarks4.men/story.php?title=anavar-cycles-stackings-demystified-the-ultimate-comprehensive-handbook
legal supplements that act like steroids
References:
https://bookmark4you.win/story.php?title=dianabol-dbol-the-ultimate-handbook-on-cycles-dosages-and-muscle-building-gains
steroid reviews
References:
https://maps.google.ae/url?q=https://www.demilked.com/author/singerfrog26/
https://brelki-vorot.ru
https://credit-news.ru
where to buy anabolic steroids bodybuilding
References:
https://maps.google.com.qa/url?q=https://kurilka-wagon.ru/user/clerkicon1/
my web-site; http://Roll-Express.Ruwww.Quilt-Blog.De/Serendipity/Exit.Php?Url=Ahr0Chm6Ly9Ragfiyxjmyxjzas5Jb20Vbmyvyuhsmgnittzmetlyvjfjdvvhoxjaweowzfdkbexttnziuzg
https://ivushka21.ru
https://dobrinya-amur.ru
cutting muscle
References:
https://bookmarking.win/story.php?title=dianabol-use-guide-frequently-asked-questions-and-safety-measures
steroids legal in bodybuilding
References:
https://images.google.cg/url?q=https://fancypad.techinc.nl/zZQ1lbCYRdWzn3oXN61wKw/
https://buhgalter-ryazan.ru
https://eiforiyavkusa.ru
muscle builder gnc
References:
https://xypid.win/story.php?title=mastering-dianabol-cycles-your-complete-guide-to-building-massive-bulk
canada steroids legal
References:
https://www.google.ps/url?q=https://intensedebate.com/people/pencilton68
anabolic muscle growth
References:
https://maps.google.com.sa/url?q=https://doc.adminforge.de/GmURuleTQla3sMPHgp0Ldg/
why are steroids bad
References:
https://forum.issabel.org/u/refundfall4
https://derufa-crimea.ru
decaduro crazy bulk
References:
https://hack.allmende.io/ctbz-X6mRBm6Mc7dXrI9vA/
side effects of steroids in men
References:
https://images.google.com.hk/url?q=https://atavi.com/share/xhk54szk6wm7
https://brelki-vorot.ru
best roids
References:
http://tellmy.ru/user/porterisland8/
crazy mass cutting stack reviews
References:
http://ansgildied.com/user/hatewrench6
https://licey5pod.ru
best performance by a human male
References:
http://community.srhtech.net/user/lawsword87
https://givotov.ru
Для заказа оборудования для бурения и цементирования скважин необходимо цементировочный агрегат ца 320, который применяется в процессе цементирования скважин для закрепления обсадных труб и изоляции пластов.
coту важных инструментов для обеспечения качественной отделки. Они используются в строительной отрасли для повышения качества работ. При выборе цементировочного агрегата необходимо учитывать несколько важных факторов .
Цементировочные агрегаты предназначены для эффективного и быстрого нанесения цементных смесей . Они используются для создания прочных оснований . При этом важно правильно выбрать цементировочный агрегат .
Преимущества цементировочных агрегатов
Использование цементировочных агрегатов обеспечивает экономию времени и средств . Они дают возможность работать с разными типами цементных растворов . При этом необходимо учитывать все виды работ .
Цементировочные агрегаты предоставляют широкий спектр возможностей . Они используются для создания прочных и устойчивых сооружений . При этом необходимо учитывать все нюансы и особенности .
Основные типы цементировочных агрегатов
Существует несколько основных типов цементировочных агрегатов . Они имеют разные размеры и производительность . При этом необходимо учитывать все факторы .
Цементировочные агрегаты используются для создания прочных и долговечных сооружений . Они используются для выполнения разнообразных строительных работ . При этом следует заранее определить объем работ и необходимую производительность.
Заключение и рекомендации
При покупке цементировочного агрегата следует правильно обслуживать и эксплуатировать оборудование. Цементировочные агрегаты выполняют функцию нанесения цементных растворов с высокой точностью. При этом необходимо учитывать все нюансы и особенности .
Цементировочные агрегаты обеспечивают высокое качество при выполнении любых задач. Они выполняют функцию нанесения цементных растворов . При этом следует заранее определить объем работ и необходимую производительность.
https://kcsodoverie.ru
anabolic steroid withdrawal symptoms
References:
https://v.gd/BKFu7s
https://ds35zvezdochka.ru
Профессиональный фотограф в Москве готов предложить вам уникальные услуги, включая фотосессию в стиле ню.
Фотографирование — это не только искусство, но и техника, которая требует постоянного саморазвития.
На сайте фотосессия для резюме вы можете заказать услуги профессионального фотографа в Москве.
самые значимые даты в столице России. Профессиональный фотограф в Москве поможет создать потрясающие и незабываемые изображения. Фотосессия может проходить в студии, на улице или в любом другом месте .
Фотография — это не только запечатление моментов, но и искусство создания незабываемых впечатлений. Фотограф в Москве, имеющий большой опыт работы и разнообразный портфолио , может предложить создание фотографий, отражающих личность и стиль клиента.
Существует много разных типов фотосессий, каждая со своим уникальным стилем и атмосферой . Фотосессия для запечатления памятных моментов или documento значимых событий требует глубокого понимания цели и задач фотосессии.
Фотограф в Москве, специализирующийся на создании фотографий для рекламы,.editorials или каталогов, может предложить уникальный и креативный подход к фотосессии . Фотосессия может быть осуществлена в разных форматах и вариантах.
Подготовка к фотосессии — это ключевой этап, на котором определяется концепция и задачи фотосессии. Фотограф в Москве поможет определить цель и задачи фотосессии .
Фотосессия может быть включать в себя элементы стилизации, макияжа и костюма . Фотограф в Москве, имеющий большой опыт работы с клиентами , может предложить высокое качество фотографий и профессиональную обработку .
Результат фотосессии — это уникальные и незабываемые фотографии . Фотограф в Москве, имеющий глубокое понимание своих клиентов и их пожеланий , может предложить индивидуальный подход и персонализированную поддержку .
Фотосессия в Москве — это уникальный шанс создать удивительные и неповторимые фотографии . Фотограф в Москве поможет создать невероятно красивые и эмоциональные фотографии .
Get Free Phone Numbers for convenient and secure registration on various services.
It’s essential for users to recognize that these free numbers might lack the reliability of conventional phone lines.
https://krasavchikbro.ru
https://kaluga-howo.ru
https://gobanya.ru
https://ds35zvezdochka.ru
https://licey5pod.ru
https://catphoto.ru
https://k-projekt.ru
https://ivushka21.ru
https://lesbitovok.ru
https://kcsodoverie.ru
https://ivushka21.ru
https://ldc-ariadna.ru
https://kvkrasnodar.ru
https://givotov.ru
https://makeupcenter.ru
https://edapridiabete.ru
https://credit-news.ru
https://licey5pod.ru
Looking for practical tips on residential siding? This Residential siding resource gives you the essentials. Get clear steps, examples, and things to avoid before you start..
https://ds35zvezdochka.ru
https://ldc-ariadna.ru
https://mart-media.ru
Looking for practical tips on design costs bathroom remodeling? This Design Costs Bathroom Remodeling resource gives you the essentials. Get clear steps, examples, and things to avoid before you start..
https://drnona-nn.ru
https://licey5pod.ru
https://kaluga-howo.ru
buy amoxicillin: AmoxDirect USA — Amoxicillin 500mg buy online
https://buhgalter-ryazan.ru
https://death-planet.ru
https://ivushka21.ru
Amoxicillin 500mg buy online amoxicillin online purchase Buy Amoxicillin for tooth infection
Buy Amoxicillin for tooth infection: buy amoxil — buy amoxicillin
https://licey5pod.ru
https://catphoto.ru
https://amoxdirectusa.shop/# Purchase amoxicillin online
https://krasavchikbro.ru
https://makeupcenter.ru
Для жителей Москвы и ее окрестностей доступна удобная доставка алкоголя круглосуточно московский прямо до двери, что делает процесс приобретения напитков максимально комфортным и быстрым.
является очень востребованной услугой среди жителей города, которые ценят свое время и хотят получить качественные напитки без выхода из дома. Эта услуга позволяет жителям Москвы не тратить время на поездку в магазин и подбор подходящих напитков. Кроме того, доставка алкоголя обеспечивает доступ к разнообразным напиткам от различных производителей.
Доставка алкоголя в Москве осуществляется компаниями , которые заботятся о качестве обслуживания и удовлетворении потребностей клиентов. Клиенты имеют возможность сделать заказ через интернет и получить его в кратчайшие сроки. Это очень удобно для занятых людей на посещение магазинов.
Доставка алкоголя в Москве имеет несколько плюсов для клиентов. Во-первых, это не потраченное время на поездку в магазин и обратно. Во-вторых, клиенты могут подобрать из разнообразных вариантов напитков, что облегчает выбор подходящего варианта . Кроме того, доставка алкоголя производится в выбранное клиентом время, что повышает уровень сервиса .
Доставка алкоголя в Москве дает гарантию безопасности клиентов, поскольку они не должны покидать свой дом и рисковать здоровьем. Это особенно важно в ситуации с повышенной угрозой для здоровья. Компании, предоставляющие услуги доставки, подбирают напитки высокого качества, что повышает доверие к сервису .
При выборе компании для доставки алкоголя в Москве необходимо учитывать несколько факторов . Во-первых, это репутация компании , которая формируется на основе обратной связи. Во-вторых, это качество напитков , которое должно быть высокого уровня . В-третьих, это уровень обслуживания , который должен соответствовать требованиям клиентов.
Компании, предоставляющие услуги доставки алкоголя в Москве, должны иметь соответствующие документы на осуществление деятельности. Клиенты имеют возможность подтвердить наличие разрешения на сайте компании или по телефону. Это дает уверенность в легитимности компании и защищает права клиентов при покупке и доставке алкоголя.
Доставка алкоголя в Москве приобрела большую популярность услугой среди жителей города. Эта услуга имеет несколько плюсов , включая экономию времени , большой выбор напитков , и безопасность . При выборе компании для доставки алкоголя нужно принять во внимание доверие компании, разнообразие предлагаемых напитков, и уровень сервисного обслуживания. Компании, предоставляющие услуги доставки алкоголя, должны иметь соответствующие документы и обеспечивать качество напитков .
Для тех, кто ищет удобную и быструю алкоголь круглосуточно в Химках, теперь есть отличный вариант, позволяющий получить алкоголь прямо на дом в кратчайшие сроки.
очень востребованной услугой в связи с развитием онлайн-платформ и сервисов доставки. Компании, предоставляющие услуги доставки алкоголя, предоставляют разнообразные варианты алкоголя, включая вина, шампанское, пиво и другие виды спиртных напитков. Удобство и скорость доставки привлекают многих клиентов для тех, кто ценит свое время и предпочитает воспользоваться услугой доставки прямо домой.
Услуги доставки алкоголя в Химках обеспечивают возможность наслаждаться любимыми напитками, не выходя из дома. Это особенно важно во время сезона праздников и торжеств . Кроме того, многие компании предоставляют круглосуточную поддержку клиентов , готовых ответить на все вопросы и помочь с выбором напитков.
Преимущества доставки алкоголя в Химках очевидны и многочисленны . Во-первых, это значительная экономия времени , поскольку вам не нужно тратить время на поездку в магазин. Во-вторых, высокое качество обслуживания обеспечивают, что ваш заказ будет выполнен быстро и профессионально. В-третьих, обширный ассортимент алкогольных напитков позволяет найти именно то, что вы ищете.
Компании, занимающиеся доставкой алкоголя, работают над улучшением качества своих услуг , чтобы клиенты могли наслаждаться высоким качеством сервиса . Это включает в себя постоянные распродажи и скидки, которые делают услугу еще более привлекательной. Кроме того, безопасные и удобные способы оплаты обеспечивают максимальный комфорт для клиентов.
Заказать доставку алкоголя в Химках достаточно легко и прямо . Вам необходимо перейти на официальный сайт , где вы сможете ознакомиться с предлагаемыми услугами и товарами . Затем вы можете воспользоваться услугой заказа онлайн, выбрав нужные напитки и указав адрес доставки.
После подтверждения заказа, будет произведен контакт для подтверждения деталей, чтобы подтвердить ваш заказ и обсудить детали доставки. Это обеспечивает точность и оперативность обслуживания. Ademas, гарантируют высокое качество продуктов, чтобы клиенты получили лучший выбор алкоголя.
В заключении, доставка алкоголя в Химках представляет собой очень удобный и комфортный способ получить любимые напитки без необходимости выхода из дома. Удобство, скорость и высокое качество обслуживания делают эту услугу достаточно привлекательной и комфортной . Если вы ищете удобный и быстрый способ насладиться алкоголем в Химках, то этот вариант будет для вас идеальным .
https://ds35zvezdochka.ru
Если вы ищете удобный и быстрый способ получить напитки, воспользуйтесь услугой алкоголь на дом, которая работает без выходных и перерывов, чтобы любой вечер или праздник был полон радости и хорошего настроения.
является современным решением для тех, кто ценит время и комфорт . Эта услуга помогает людям сэкономить время и силы. Благодаря доставке алкоголя в Пушкино, могут избежать очередей и пробок на дорогах.
Доставка алкоголя в Пушкино проводится компаниями, которые заботятся о качестве обслуживания . Компании, предоставляющие эту услугу, работают над улучшением качества своих услуг и расширением ассортимента предлагаемых продуктов . Это позволяет им конкурировать с другими компаниями и привлекать новых клиентов .
Преимущества доставки алкоголя в Пушкино очевидны и многочисленны, начиная от экономии времени и заканчивая удобством . Доставка алкоголя помогает избежать пробок и длинных очередей в магазинах. Благодаря этому сервису, люди могут расслабиться и наслаждаться своим любимым напитком без хлопот .
Доставка алкоголя в Пушкино помогает поддерживать здоровье и безопасность, снижая риск вождения в нетрезвом состоянии. Компании, которые занимаются доставкой, гарантируют подлинность и качество продаваемых изделий .
Заказать доставку алкоголя в Пушкино позволяет клиентам отслеживать статус их заказа в режиме реального времени. Для начала, нужно посетить сайт компании и просмотреть ассортимент предлагаемых продуктов . Затем, должен указать адрес доставки и выбрать удобный метод оплаты .
После подтверждения заказа, компания обрабатывает его и направляет курьера для доставки . Курьер приезжает в указанное время и доставляет товар напрямую клиенту .
Будущее доставки алкоголя в Пушкино выглядит перспективным, с учетом роста спроса на подобные услуги . Компании, занимающиеся доставкой, сотрудничают с известными брендами для того, чтобы предложить эксклюзивные напитки. Это позволит им оставаться лидерами на рынке и удовлетворять растущий спрос на доставку алкоголя .
Доставка алкоголя в Пушкино будет включать в себя новые услуги, такие как подбор вина к столу или организация вечеринок . В будущем, смогут рассчитывать на высокий уровень обслуживания и гарантию качества от компаний, занимающихся доставкой алкоголя.
https://death-planet.ru
Для тех, кто ищет удобный способ получить свой любимый напиток, доставка алкоголя на дом балашиха становится идеальным решением.
становится все более популярной услугой среди жителей города. Это связано с тем, что люди становятся все более занятыми, что не позволяет им идти за алкоголем в магазин. Компании, занимающиеся доставкой алкоголя, имеют обширный выбор алкогольных напитков .
Доставка алкоголя в Балашихе работает без перерывов, что очень удобно для заказчиков . Заказ можно сделать с помощью мобильного приложения, что делает процесс заказа простым .
Доставка алкоголя в Балашихе дает несколько существенных преимуществ для своих клиентов. Одним из основных преимуществ является быстрота доставки, что высоко оценено клиентами. Кроме того, доставка алкоголя обеспечивает сохранность товара , что имеет большое значение для качества товара.
Доставка алкоголя в Балашихе также позволяет клиентам экономить время , что может быть использовано более продуктивно. Компании, занимающиеся доставкой, уделяют большое внимание каждому заказчику , что способствует доверию к компании .
Заказать доставку алкоголя в Балашихе не составляет особого труда . Для начала необходимо найти достойного поставщика услуг, что можно сделать, прочитав отзывы. После выбора компании нужно зайти на официальный сайт и просмотреть имеющийся выбор .
Затем следует сделать заказ , что можно сделать онлайн . После оформления заказа будет организована оплата, что можно сделать различными способами . Компания затем доставит заказ .
Доставка алкоголя в Балашихе стала необходимостью для многих. Она экономит время клиентов , дает доступ к обширному ассортименту и гарантирует целостность продукции. Компании, занимающиеся доставкой, стараются улучшить свои услуги , что создает положительную тенденцию .
В заключение, доставка алкоголя в Балашихе является перспективной услугой . Ее можно легко заказать , и она дает ряд преимуществ для клиентов. Таким образом, доставка алкоголя будет продолжать развиваться .
https://maminboss.ru
Мы предлагаем заказать алкоголь 24 часа с оперативной и точной доставкой по Москве и области.
Доставка алкогольных напитков становится все более популярной услугой в современном мире. Это связано с тем, что Доставка алкоголя также позволяет людям заказывать алкоголь из разных магазинов и бутиков, что расширяет их выбор.
Люди не нужно тратить время на ожидание в очереди, и они могут избежать стресса.
Доставка на следующий день является более доступной опцией, но она может быть менее удобной.
Люди могут заказать алкоголь онлайн или по телефону, и он будет доставлен прямо к их двери.
https://gobanya.ru
how to get Prednisone legally online: Prednisone without prescription USA — how to get Prednisone legally online
https://buhgalter-ryazan.ru
https://mart-media.ru
https://kcsodoverie.ru
https://bostonpub.ru
Prednisone tablets online USA: online pharmacy Prednisone fast delivery — PredniWell Online
discreet delivery for ED medication: discreet delivery for ED medication — Tadalafil tablets
У нас вы найдете актуальные расценки на шиномонтажные работы, которые помогут вам с выбором услуг в нашем сервисе.
Цены на шиномонтажные услуги варьируются в зависимости от различных обстоятельств.
https://edapridiabete.ru
tadalafil 20mg canada: EverLastRx — EverLastRx
https://crossfire-megacheat.ru
Need this topic? Start with Home Renovation. Packed with the key takeaways only. Good starting point before deeper digging.
https://credit-news.ru
https://kcsodoverie.ru
safe online pharmacy for ED pills generic tadalafil from india safe online pharmacy for ED pills
https://drnona-nn.ru
tadalafil price in india: discreet delivery for ED medication — safe online pharmacy for ED pills
https://ldc-ariadna.ru
https://gobanya.ru
gabapentin neuropathic cancer pain: FDA-approved gabapentin alternative — gabapentin capsules for nerve pain
order gabapentin discreetly: affordable Neurontin medication USA — NeuroCare Direct
NeuroCare Direct gabapentin capsules for nerve pain neuropathic pain relief treatment online
how to get Prednisone legally online: online pharmacy Prednisone fast delivery — Prednisone tablets online USA
FDA-approved gabapentin alternative: neuropathic pain relief treatment online — affordable Neurontin medication USA
trusted Stromectol source online Stromectol ivermectin tablets for humans USA does tractor supply sell ivermectin
generic ivermectin online pharmacy: generic ivermectin for humans — order Stromectol discreet shipping USA
Review my site :: PokerTube — Watch Free Poker Videos & TV Shows
neuropathic pain relief treatment online generic gabapentin pharmacy USA FDA-approved gabapentin alternative
https://medivermonline.shop/# does stromectol kill nits
Clear overview: adu construction companies. Great for a quick orientation. Perfect for a quick scan on the go.
FDA-approved gabapentin alternative: NeuroCare Direct — neuropathic pain relief treatment online
EverLastRx: safe online pharmacy for ED pills — buy tadalafil 10mg india
PredniWell Online prednisone 4mg tab online pharmacy Prednisone fast delivery
https://neurocaredirect.com/# order gabapentin discreetly
https://khimkijpq.ru
https://taganrogmnb.ru
https://murmanskdlg.ru
prednisone 5mg cost: prednisone 50 mg tablet cost — buy prednisone 20mg
https://sterlitamakrty.ru
https://medivermonline.shop/# ivermectin stock price today
https://lyubertsycvb.ru
neuropathic pain relief treatment online gabapentin vs lyrica for diabetic neuropathy gabapentin capsules for nerve pain
Если вы ищете эффективный способ улучшить позиции своего сайта в поисковых системах, то курсы seo москва станут идеальным решением для вас.
являются эффективным способом улучшения позиций сайта в поисковых системах . Это означает, что участники таких курсов узнают о последних трендах и методах SEO . SEO курсы базируются на практическом опыте преподавателей .
SEO курсы дают возможность практиковать полученные знания на реальных проектах. Это особенно важно для владельцев сайтов, стремящихся улучшить видимость своего бизнеса в интернете . Участники SEO курсов получают доступ к необходимым инструментам и ресурсам для SEO .
Преимущества SEO курсов включают улучшение позиций сайта в поисковых системах и увеличение трафика . Это означает, что участники курсов могут оптимизировать сайты для повышения их видимости в поисковых системах . SEO курсы предоставляют знания о последних трендах и методах в SEO .
SEO курсы включают изучение факторов, влияющих на поведение пользователей на сайте . Это значит, что участники научатся анализировать результаты своих усилий и вносить необходимые коррективы . Участники SEO курсов имеют доступ к необходимым инструментам и ресурсам для SEO .
Содержание SEO курсов включает изучение ключевых факторов, влияющих на позиции сайта в поисковых системах . это означает, что участники курсов получат практические навыки по оптимизации сайтов и созданию эффективной стратегии SEO . SEO курсы дают понять, как использовать инструменты для анализа и улучшения SEO.
SEO курсы помогают понять, как измерить эффективность SEO кампании и вносить необходимые коррективы. Это значит, что участники получат навыки, необходимые для постоянного улучшения качества своего сайта и его видимости в интернете. Участники SEO курсов получают поддержку на протяжении всего обучения и после его окончания.
Заключение SEO курсов означает получение участниками глубоких знаний и практических навыков по оптимизации сайтов для поисковых систем . Это означает, что участники смогут анализировать и улучшать результаты своих усилий. SEO курсы включают практические занятия по оптимизации сайтов .
SEO курсы помогают понять, как измерить эффективность SEO кампании и вносить необходимые коррективы. Это значит, что участники научатся анализировать результаты своих усилий и улучшать позиции своего сайта в поисковых системах . Участники SEO курсов могут общаться с преподавателями и другими участниками для обмена опытом и знаниями .
Если вы ищете качественные автошины шипованные, то наш магазин предлагает широкий ассортимент зимних шин по доступным ценам.
разработанную для безопасной езды на заснеженных и обледенелых дорогах . Эта конструкция оснащена шипами, увеличивающие коэффициент сцепления с дорогой, тем самым повышая безопасность . Использование зимних шин шипованных становится особенно актуальным в регионах с холодным климатом, где зимы особо суровые и дороги часто покрыты льдом и снегом .
Зимние шины шипованные являются обязательным атрибутом для многих автолюбителей, предпочитающих безопасность и стабильность на дороге в период низких температур . Они позволяют водителям чувствовать себя более уверенно и безопасно на дороге . Кроме того, зимние шины шипованные созданы для использования в экстремальных условиях .
Использование зимних шин шипованных имеет множество преимуществ, позволяющих водителям чувствовать себя более уверенно и безопасно на дороге . Зимние шины шипованные позволяют автомобилю более легко и безопасно преодолевать подъемы и спуски на заснеженных дорогах . Кроме того, зимние шины шипованные снижают риск аварий и травм .
Зимние шины шипованные также разработаны для работы в различных температурных режимах . Они позволяют автомобилю сохранять стабильность и управляемость на дороге . Использование зимних шин шипованных повышает общую безопасность и снижает риск аварий на дороге .
Существует несколько типов зимних шин шипованных, предназначенных для различных типов автомобилей и условий эксплуатации . Зимние шины шипованные могут быть классифицированы по типу шипов, используемых в их конструкции . Кроме того, зимние шины шипованные могут быть разработаны для использования на конкретных типах автомобилей, таких как легковые или грузовые автомобили .
Зимние шины шипованные также быть разработаны для совместимости с различными типами автомобильных колес . Использование зимних шин шипованных позволяет водителям чувствовать себя более уверенно и безопасно на дороге . Зимние шины шипованные являются обязательным атрибутом для многих автолюбителей .
Использование зимних шин шипованных является важным элементом безопасности на дороге, обеспечивая повышенную трение и снижение риска заноса . Зимние шины шипованные созданы для использования в экстремальных условиях . Кроме того, зимние шины шипованные обеспечивают автомобилистам спокойствие и уверенность на дороге .
Зимние шины шипованные являются обязательным атрибутом для многих автолюбителей . Использование зимних шин шипованных обеспечивает автомобилистам спокойствие и уверенность на дороге . В заключении, зимние шины шипованные обеспечивают повышенную трение и снижение риска заноса .
https://novorossiyskdfg.ru
У нас вы найдете актуальные шиномонтаж расценки, которые помогут вам с выбором услуг в нашем сервисе.
Рекомендуется изучить отзывы клиентов и сравнить предложения различных мастерских перед выбором.
Helpful page about Drywall finishing. Great for a quick orientation. Good starting point before deeper digging.
online pharmacy Prednisone fast delivery: Prednisone tablets online USA — online pharmacy Prednisone fast delivery
https://murmanskqaz.ru
https://kostromavbn.ru
https://blagoveshchensklop.ru
https://khimkiumn.ru
https://nalchikcvb.ru
my web-site; Best Online poker Sites
Prednisone without prescription USA: online pharmacy Prednisone fast delivery — Prednisone tablets online USA
https://lyubertsyxza.ru
https://novorossiyskdfg.ru
online pharmacy Prednisone fast delivery Prednisone without prescription USA online pharmacy Prednisone fast delivery
https://murmanskqaz.ru
https://nalchiktyu.ru
Закладки тут — купить гашиш, мефедрон, альфа-РїРІРї
Онлайн магазин — купить мефедрон, кокаин, бошки
Магазин 24/7 — купить закладку MEF GASH SHIHSKI
Магазин 24/7 — купить закладку MEF GASH SHIHSKI
online pharmacy Prednisone fast delivery: how to get Prednisone legally online — PredniWell Online
Онлайн магазин — купить мефедрон, кокаин, бошки
Considero que esta es una de las informaciones más valiosas que he encontrado y me complace enormemente haber leído su artículo. Me proporcionó información valiosa y agradezco el esfuerzo que dedicó a crearlo. Dicho esto, me gustaría señalar algunos pequeños problemas que podrían mejorarse para una experiencia aún más fluida. En general, el sitio web se ve impresionante, los artículos son interesantes y la calidad de su trabajo realmente destaca. ¡Excelente trabajo y enhorabuena!
Приобрести MEF GASH SHIHSKI ALFA — ОТЗЫВЫ, ГАРАНТРР, КАЧЕСТВО
Онлайн магазин — купить мефедрон, кокаин, бошки
https://neurocaredirect.com/# NeuroCare Direct
Онлайн магазин — купить мефедрон, кокаин, бошки
http://medivermonline.com/# low-cost ivermectin for Americans
generic tadalafil india: discreet delivery for ED medication — discreet delivery for ED medication
https://neurocaredirect.shop/# Neurontin online without prescription USA
Закладки тут — купить гашиш, мефедрон, альфа-РїРІРї
Приобрести MEF GASH SHIHSKI ALFA — ОТЗЫВЫ, ГАРАНТРР, КАЧЕСТВО
Prednisone tablets online USA: online prednisone 5mg — buy prednisone without prescription
Приобрести онлайн кокаин, мефедрон, гашиш, бошки
Онлайн магазин — купить мефедрон, кокаин, бошки
Онлайн магазин — купить мефедрон, кокаин, бошки
Онлайн магазин — купить мефедрон, кокаин, бошки
Приобрести MEF GASH SHIHSKI ALFA — ОТЗЫВЫ, ГАРАНТРР, КАЧЕСТВО
Онлайн магазин — купить мефедрон, кокаин, бошки
Приобрести онлайн кокаин, мефедрон, гашиш, бошки
discreet delivery for ED medication EverLastRx how to order Cialis online legally
Магазин 24/7 — купить закладку MEF GASH SHIHSKI
Закладки тут — купить гашиш, мефедрон, альфа-РїРІРї
Приобрести MEF GASH SHIHSKI ALFA — ОТЗЫВЫ, ГАРАНТРР, КАЧЕСТВО
Онлайн магазин — купить мефедрон, кокаин, бошки
Магазин 24/7 — купить закладку MEF GASH SHIHSKI
https://neurocaredirect.com/# FDA-approved gabapentin alternative
Приобрести MEF GASH SHIHSKI ALFA — ОТЗЫВЫ, ГАРАНТИИ, КАЧЕСТВО
Закладки тут — купить гашиш, мефедрон, альфа-пвп
Приобрести MEF GASH SHIHSKI ALFA — ОТЗЫВЫ, ГАРАНТИИ, КАЧЕСТВО
Приобрести MEF GASH SHIHSKI ALFA — ОТЗЫВЫ, ГАРАНТИИ, КАЧЕСТВО
Приобрести онлайн кокаин, мефедрон, гашиш, бошки
Приобрести онлайн кокаин, мефедрон, гашиш, бошки
http://neurocaredirect.com/# affordable Neurontin medication USA
Онлайн магазин — купить мефедрон, кокаин, бошки
Приобрести MEF GASH SHIHSKI ALFA — ОТЗЫВЫ, ГАРАНТИИ, КАЧЕСТВО
online pharmacy Prednisone fast delivery: how to get Prednisone legally online — prednisone 10mg tabs
Закладки тут — купить гашиш, мефедрон, альфа-пвп
Lumina Solar is recognized as the leading solar panel installation company operating in Middletown,
MD, an area with a population of approximately 4,400
residents. Middletown lies at latitude 39.4512 and longitude -77.5733, defined by a mix of residential zones and commercial zones.
The town’s closeness to major points of interest like Gambrill State Park and the
C&O Canal National Historical Park highlights the community’s appreciation for natural resources
and sustainability, making solar energy well-suited. The median household income in Middletown is around $70,000,
showing a robust potential customer base for investing in renewable energy solutions.
Lumina Solar skillfully supports this demographic by offering tailored solar solutions that maximize energy efficiency and savings
for residents and businesses alike. Their knowledge of Maryland’s solar
incentives, including the Solar Renewable Energy Credit program, allows them to optimize cost-effectiveness for clients in Middletown. Additionally, Maryland’s
average solar radiation of 4.5 kWh/m²/day is optimal for solar
panel performance, which Lumina Solar utilizes to guarantee high-quality installations.
Through their comprehensive service in Middletown, Lumina Solar shows unmatched expertise in sustainable energy solutions.
Приобрести онлайн кокаин, мефедрон, гашиш, бошки
Приобрести онлайн кокаин, мефедрон, гашиш, бошки
Магазин 24/7 — купить закладку MEF GASH SHIHSKI
Prednisone tablets online USA how to get Prednisone legally online PredniWell Online
Магазин 24/7 — купить закладку MEF GASH SHIHSKI
Онлайн магазин — купить мефедрон, кокаин, бошки
Приобрести MEF GASH SHIHSKI ALFA — ОТЗЫВЫ, ГАРАНТИИ, КАЧЕСТВО
Магазин 24/7 — купить закладку MEF GASH SHIHSKI
Mediverm Online: order Stromectol discreet shipping USA — trusted Stromectol source online
Онлайн магазин — купить мефедрон, кокаин, бошки
http://medivermonline.com/# low-cost ivermectin for Americans
Онлайн магазин — купить мефедрон, кокаин, бошки
Закладки тут — купить гашиш, мефедрон, альфа-пвп
Онлайн магазин — купить мефедрон, кокаин, бошки
Закладки тут — купить гашиш, мефедрон, альфа-пвп
Native Sons Home Services are recognized experts in bathroom remodeling, providing services to the Harwood,
MD area with exceptional skill and craftsmanship.
Harwood is located at approximately 38.8985° N latitude
and -76.5900° W longitude, located within Anne Arundel
County, a region known for its wealthy communities and historic homes.
The median household income in Anne Arundel County is around $100,000, indicating a clientele that
values quality home improvements. Native Sons Home Services understands
the unique architectural styles prevalent in this area, such as Colonial and
Cape Cod homes, making sure their bathroom remodels enhance the regional aesthetics.
With Anne Arundel County’s population nearing 600,000,
Native Sons Home Services is prepared to meet the wide-ranging needs of homeowners seeking modern, functional, and upscale bathroom
upgrades. Points of interest like the Chesapeake Bay and local marinas
shape design preferences towards spa-like, water-inspired bathrooms,
which Native Sons Home Services skillfully incorporates.
Their commitment to using premium materials and advanced
remodeling techniques addresses the discerning homeowners in Harwood,
ensuring every project increases property value and
personal comfort. Native Sons Home Services’ expertise makes
them the leading choice for bathroom remodeling in the Harwood, MD service area.
Приобрести онлайн кокаин, мефедрон, гашиш, бошки
https://medivermonline.shop/# Stromectol ivermectin tablets for humans USA
ivermectin dose for covid
Магазин 24/7 — купить закладку MEF GASH SHIHSKI
Приобрести MEF GASH SHIHSKI ALFA — ОТЗЫВЫ, ГАРАНТИИ, КАЧЕСТВО
Онлайн магазин — купить мефедрон, кокаин, бошки
Онлайн магазин — купить мефедрон, кокаин, бошки
Приобрести MEF GASH SHIHSKI ALFA — ОТЗЫВЫ, ГАРАНТИИ, КАЧЕСТВО
Приобрести MEF GASH SHIHSKI ALFA — ОТЗЫВЫ, ГАРАНТИИ, КАЧЕСТВО
Магазин 24/7 — купить закладку MEF GASH SHIHSKI
order gabapentin discreetly: generic gabapentin pharmacy USA — FDA-approved gabapentin alternative
Магазин 24/7 — купить закладку MEF GASH SHIHSKI
Магазин 24/7 — купить закладку MEF GASH SHIHSKI
safe online pharmacy for ED pills where can i buy tadalafil safe online pharmacy for ED pills
Если вы ищете лучшие фотографы москвы, то стоит обратить внимание на их портфолио и отзывы клиентов, чтобы выбрать того, кто лучше всего соответствует вашим потребностям для создания незабываемых фотографий.
В столице России проживает большое количество профессиональных фотографов, создающих невероятные снимки. Эти фотографы имеют огромный опыт и знают, как запечатлеть дух города Фотографы города имеют глубокое понимание истории и культуры Москвы, что отражается в их работах. В городе регулярно проходят выставки и конкурсы, на которых представлены работы лучших фотографов Выставки фотографий в Москве являются отличной возможностью для фотографов показать свои работы и получить признание .
Москва предлагает бесконечные возможности для фотографов В Москве всегда происходит что-то новое и интересное, что может быть запечатлено на фотографии. Лучшие фотографы города знают, как использовать эти возможности Фотографы Москвы имеют талант запечатлеть суть города и его жителей .
Портретная фотография является одним из наиболее популярных жанров в Москве Портретная фотография в Москве пользуется большим спросом, особенно среди знаменитостей и бизнесменов . Лучшие портретные фотографы города знают, как запечатлеть суть человека Они знают, как использовать свет, позу и выражение лица, чтобы создать потрясающие портреты.
Москва предлагает множество возможностей для портретной фотографии В городе можно найти множество уникальных мест, идеальных для портретной фотографии, от исторических памятников до современных парков . Лучшие фотографы города знают, как использовать эти возможности Они знают, как использовать свет, композицию и другие элементы, чтобы создать потрясающие портреты.
Фотография городского пейзажа является популярным жанром в Москве Фотография городского пейзажа в Москве позволяет показать всю красоту и разнообразие города . Лучшие фотографы города знают, как запечатлеть суть городского пейзажа Фотографы Москвы имеют талант запечатлеть характер и личность города, что делает их работы особенно ценными .
Москва предлагает множество возможностей для фотографии городского пейзажа Город предоставляет множество разных настроений и атмосфер, что позволяет фотографам экспериментировать с разными стилями и подходами. Лучшие фотографы города знают, как использовать эти возможности Они знают, как использовать свет, композицию и другие элементы, чтобы создать потрясающие фотографии.
Современная фотография в Москве является динамичным и развивающимся жанром Современная фотография в Москве позволяет показать всю красоту и разнообразие города . Лучшие фотографы города знают, как использовать эти возможности Они знают, как использовать свет, композицию и другие элементы, чтобы создать потрясающие фотографии.
Москва предлагает множество возможностей для фотографов, чтобы показать свою креативность Город предоставляет множество разных настроений и атмосфер, что позволяет фотографам экспериментировать с разными стилями и подходами. Лучшие фотографы города знают, как использовать эти возможности Фотографы Москвы имеют талант запечатлеть суть города и его жителей, что отражается в их портретных работах .
Магазин 24/7 — купить закладку MEF GASH SHIHSKI
Онлайн магазин — купить мефедрон, кокаин, бошки
http://predniwellonline.com/# PredniWell Online
Если вы ищете эффективный способ улучшить позиции своего сайта в поисковых системах, то школа seo станут идеальным решением для вас.
представляют собой систематизированное обучение по оптимизации сайтов для поисковых систем . Это означает, что участники таких курсов научатся создавать эффективную стратегию SEO. SEO курсы базируются на практическом опыте преподавателей .
SEO курсы позволяют участникам развивать свои навыки в области SEO . Это особенно важно для маркетологов, желающих расширить свой набор инструментов . Участники SEO курсов могут общаться с преподавателями и другими участниками для обмена опытом .
Преимущества SEO курсов заключаются в получении глубоких знаний по оптимизации сайтов для поисковых систем . Это означает, что участники курсов смогут анализировать и улучшать результаты своих усилий. SEO курсы предоставляют знания о последних трендах и методах в SEO .
SEO курсы помогают понять, как измерить эффективность SEO кампании. Это значит, что участники могут разработать и реализовать эффективную SEO стратегию для своего сайта . Участники SEO курсов получают поддержку на протяжении всего обучения.
Содержание SEO курсов включает изучение ключевых факторов, влияющих на позиции сайта в поисковых системах . это означает, что участники курсов узнают о последних трендах и методах SEO . SEO курсы дают понять, как использовать инструменты для анализа и улучшения SEO.
SEO курсы включают практические занятия по оптимизации сайтов и созданию эффективной стратегии SEO . Это значит, что участники получат навыки, необходимые для постоянного улучшения качества своего сайта и его видимости в интернете. Участники SEO курсов получают поддержку на протяжении всего обучения и после его окончания.
Заключение SEO курсов включает в себя разработку и реализацию эффективной SEO стратегии для своего сайта . Это означает, что участники смогут анализировать и улучшать результаты своих усилий. SEO курсы предоставляют знания о последних трендах и методах в SEO .
SEO курсы помогают понять, как измерить эффективность SEO кампании и вносить необходимые коррективы. Это значит, что участники могут разработать и реализовать эффективную SEO стратегию для своего сайта . Участники SEO курсов могут общаться с преподавателями и другими участниками для обмена опытом и знаниями .
Everything is very open with a very clear clarification of the issues.
It was truly informative. Your website is extremely helpful.
Thanks for sharing!
Stop by my homepage … Lela
Приобрести онлайн кокаин, мефедрон, гашиш, бошки
Магазин 24/7 — купить закладку MEF GASH SHIHSKI
Онлайн магазин — купить мефедрон, кокаин, бошки
Приобрести онлайн кокаин, мефедрон, гашиш, бошки
Для тех, кто ищет удобный способ получить свой любимый напиток, алкоголь на дом становится идеальным решением.
становится все более востребованной среди жителей города. Это связано с ростом числа занятых людей , что не позволяет им лично покупать алкоголь . Компании, занимающиеся доставкой алкоголя, предлагают широкий ассортимент напитков .
Доставка алкоголя в Балашихе осуществляется круглосуточно , что позволяет клиентам заказывать напитки в любое время. Заказ можно сделать с помощью мобильного приложения, что делает процесс заказа простым .
Доставка алкоголя в Балашихе дает несколько существенных преимуществ для своих клиентов. Одним из основных преимуществ является быстрота доставки, что имеет большое значение для заказчиков . Кроме того, доставка алкоголя обеспечивает сохранность товара , что важно для поддержания качества продукции .
Доставка алкоголя в Балашихе также дает возможность сэкономить время , что может быть использовано для более важных дел . Компании, занимающиеся доставкой, уделяют большое внимание каждому заказчику , что формирует лояльность клиентов.
Заказать доставку алкоголя в Балашихе не составляет особого труда . Для начала необходимо выбрать компанию, которая занимается доставкой , что можно сделать, прочитав отзывы. После выбора компании необходимо открыть веб-сайт и изучить список доступных напитков.
Затем нужно разместить заказ, что можно сделать через мобильное приложение. После оформления заказа будет организована оплата, что можно сделать различными способами . Компания затем доставит заказ .
Доставка алкоголя в Балашихе стала необходимостью для многих. Она дает возможность не тратить время, предлагает широкий ассортимент напитков и обеспечивает качество доставляемых товаров . Компании, занимающиеся доставкой, стремятся повысить качество обслуживания, что создает положительную тенденцию .
В заключение, доставка алкоголя в Балашихе является услугой с большим потенциалом. Ее можно легко заказать , и она имеет несколько существенных преимуществ для клиентов. Таким образом, доставка алкоголя будет и дальше совершенствоваться.
Приобрести MEF GASH SHIHSKI ALFA — ОТЗЫВЫ, ГАРАНТИИ, КАЧЕСТВО
Онлайн магазин — купить мефедрон, кокаин, бошки
NeuroCare Direct neuropathic pain relief treatment online NeuroCare Direct
Приобрести MEF GASH SHIHSKI ALFA — ОТЗЫВЫ, ГАРАНТИИ, КАЧЕСТВО
Feel free to visit my page — PokerVIP — Online Poker Strategy, Tips, Rakeback And Bonuses
order gabapentin discreetly: order gabapentin discreetly — NeuroCare Direct
how to get Prednisone legally online Prednisone tablets online USA Prednisone without prescription USA
Sophia Shekinah Tantric Therapy is recognized as the leading Tantra Bodywork
service in North-Holland. The provider provides a one-of-a-kind and profoundly soothing treatment that exceeds conventional massage techniques.
Each treatment is designed to cater to the individual
needs of the patron ensuring a personalized path of
recovery and introspection. The specialists at
Sophia Shekinah are well-versed and educated in the time-honored practice of Tantric massage delivering a comprehensive
style that heals the body, mental state, and essence.
The setting is tranquil and friendly creating a trusted setting where customers can entirely de-stress and
be receptive to the therapeutic experience. Sophia Shekinah uses careful and mindful
pressure to stimulate energy and promote deep relaxation. This works to lower
tension, release tension and enhance overall well-being.
Guests often notice themselves feeling rejuvenated and renewed after each visit
with a restored feeling of wellness and unity.
The service is passionate about ensuring a expert and
courteous experience with a dedication on patron satisfaction and confidentiality.
Sophia Shekinah Tantric Therapy is committed to assisting people explore
their inner selves and access deeper understanding through the
strength of Tantra bodywork. For those seeking
the leading Tantric bodywork treatment in North-Holland, Sophia
Shekinah Tantric Therapy stands out as the leading provider
ensuring outstanding attention and profound effects without fail.
https://medivermonline.shop/# trusted Stromectol source online
low-cost ivermectin for Americans
https://neurocaredirect.com/# NeuroCare Direct
https://medivermonline.com/# walgreens ivermectin
Stromectol ivermectin tablets for humans USA
Tadalafil tablets: FDA-approved Tadalafil generic — FDA-approved Tadalafil generic
trusted Stromectol source online Mediverm Online low-cost ivermectin for Americans
https://medreliefuk.com/# Prednisolone tablets UK online
private online pharmacy UK: UK online pharmacy without prescription — order medication online legally in the UK
order steroid medication safely online: UK chemist Prednisolone delivery — MedRelief UK
Here is my site: Complete RTP database for Pragmatic Play Slots
buy viagra: buy sildenafil tablets UK — British online pharmacy Viagra
http://amoxicareonline.com/# generic amoxicillin
online pharmacy BritMeds Direct order medication online legally in the UK
Feel free to visit my web site: High Stack Poker
https://amoxicareonline.shop/# amoxicillin uk
cheap amoxicillin: UK online antibiotic service — cheap amoxicillin
Amoxicillin online UK UK online antibiotic service amoxicillin uk
buy corticosteroids without prescription UK: buy prednisolone — UK chemist Prednisolone delivery
Sophia Shekinah Tantric Therapy is famous as the leading Tantric Massage practitioner in North Holland.
The provider features a exceptional and intensely calming session that goes
beyond typical massage styles. Each experience is
designed to address the unique needs of the customer delivering a bespoke journey of healing and self-awareness.
The experts at Sophia Shekinah are experienced and skilled in the traditional craft of Tantric massage utilizing a whole-body method that nurtures the body, mental state, and soul.
The atmosphere is relaxing and warm forming a safe space
where visitors can fully relax and allow themselves to the restorative journey.
Sophia Shekinah uses careful and conscious strokes to ignite energy and
promote deep relaxation. This works to minimize strain, loosen tightness and
support holistic health. Patrons often report feeling
revitalized and recharged after each appointment with a fresh awareness of harmony and coherence.
The organization is devoted to ensuring a professional and courteous approach
with a dedication on customer ease and security.
Sophia Shekinah Tantric Therapy is passionate about supporting clients connect with
their inner being and achieve a higher state of consciousness through the power of Tantra
massage. For those looking for the finest Tantric bodywork
treatment in North Holland, Sophia Shekinah Tantric Therapy shines as the top choice providing remarkable attention and powerful changes each session.
https://britpharmonline.com/# buy viagra online
buy sildenafil tablets UK: BritPharm Online — viagra uk
buy penicillin alternative online: generic amoxicillin — Amoxicillin online UK
paris sportif foot foot africain
pronostic foot gratuit parier pour le foot
Закладки тут — купить гашиш, мефедрон, альфа-пвп
Закладки тут — купить гашиш, мефедрон, альфа-пвп
Закладки тут — купить гашиш, мефедрон, альфа-пвп
Магазин 24/7 — купить закладку MEF GASH SHIHSKI
Магазин 24/7 — купить закладку MEF GASH SHIHSKI
Приобрести MEF GASH SHIHSKI ALFA — ОТЗЫВЫ, ГАРАНТИИ, КАЧЕСТВО
BritPharm Online: buy viagra online — buy viagra online
Feel free to surf to my homepage :: Foster
Для тех, кто интересуется нумерологией по дате рождения, существует возможность нумерология онлайн, что может открыть новые перспективы в понимании себя и своих жизненных целей.
Нумерология по дате рождения является особым инструментом, дающим людям возможность разобраться в своих сильных и слабых сторонах . Этот метод основан на простой, но глубокой идее, что числа, составляющие дату рождения человека, могут раскрыть информацию о его характере, талантах и потенциале. Нумерология по дате рождения является древним искусством, позволяющим людям проникнуть в тайны числа и раскрыть скрытые истины. Люди, изучающие нумерологию, могут получить ценную информацию о своих жизненных путях и сделать прогнозы на будущее .
Нумерология по дате рождения включает в себя расчет различных чисел, таких как число жизни, число совместимости и число судьбы . Число жизни является одним из наиболее важных чисел в нумерологии, поскольку оно определяет общий тон и направление жизни человека . Нумерология по дате рождения включает в себя анализ месяца и года рождения, что может помочь людям понять свои сильные и слабые стороны .
Числа в нумерологии являются ключевыми элементами, которые могут помочь людям понять свою судьбу. Каждое число в нумерологии имеет свое особое значение и может раскрыть информацию о будущем человека . Нумерология по дате рождения включает в себя анализ чисел от 1 до 9, которые могут дать представление о судьбе человека. Число 1 в нумерологии является числом человека, который имеет сильную волю и может добиться успеха .
Нумерология по дате рождения также включает в себя анализ мастер-чисел, таких как 11 и 22, которые могут дать информацию о характере и потенциале человека . Мастер-числа в нумерологии имеют особое значение и могут дать информацию о характере и потенциале человека . Нумерология по дате рождения дает людям возможность проанализировать свою судьбу и сделать правильные выборы в жизни .
Нумерология по дате рождения может быть использована для понимания сильных и слабых сторон человека и сделать прогнозы на будущее . Нумерология по дате рождения может помочь людям понять свои сильные и слабые стороны, что может быть полезно в отношениях и личной жизни . Нумерология по дате рождения также может быть использована для понимания совместимости между людьми, что может быть полезно в отношениях и браке .
Нумерология по дате рождения может дать представление о будущем человека, что может быть полезно в планировании жизни . Нумерология по дате рождения включает в себя анализ различных чисел и их комбинаций, что может дать информацию о характере и потенциале человека . Нумерология по дате рождения позволяет людям разобраться в своих сильных сторонах и слабостях и сделать прогнозы на будущее.
Нумерология по дате рождения является уникальным инструментом, который может помочь людям понять свою судьбу и сделать прогнозы на будущее . Нумерология по дате рождения является древним искусством, позволяющим людям проникнуть в тайны числа и раскрыть скрытые истины. Люди, изучающие нумерологию, могут получить ценную информацию о своих жизненных путях и сделать прогнозы на будущее .
https://raspilservice.ru
Компания специализируется на поставка нерудных материалов, что делает ее лидером в сфере поставок сыпучих материалов для строительной отрасли.
имеют большое значение для различных отраслей промышленности. Они используются в производстве строительных материалов . Кроме того, нерудные материалы должны быть безопасны для использования.
Нерудные материалы имеют свои уникальные свойства и характеристики . Они могут быть использованы для создания инновационных решений. Кроме того, нерудные материалы должны быть применены с учетом условий эксплуатации.
Нерудные материалы могут быть классифицированы по своим свойствам и характеристикам . Они могут быть применены в различных сферах промышленности . Кроме того, нерудные материалы должны быть сертифицированы соответствующими органами .
Нерудные материалы такие как песок, гравий и щебень . Они могут быть применены в различных сферах промышленности . Кроме того, нерудные материалы должны быть применены с учетом условий эксплуатации.
Нерудные материалы применяются в различных сферах промышленности . Они могут быть использованы для создания уникальных дизайнов . Кроме того, нерудные материалы должны быть выбраны с учетом требований проекта .
Нерудные материалы такие как керамзит и перлит . Они могут быть применены в различных сферах промышленности . Кроме того, нерудные материалы должны быть использованы с учетом их свойств и характеристик .
Нерудные материалы будут продолжать играть важную роль в строительной индустрии . Они могут быть использованы для создания инновационных решений. Кроме того, нерудные материалы должны быть выбраны с учетом требований проекта .
Нерудные материалы будут применяться в новых условиях. Они могут быть применены в различных сферах промышленности . Кроме того, нерудные материалы должны быть применены с учетом условий эксплуатации.
https://din-avto.ru
https://freeppt.ru
https://medreliefuk.com/# buy corticosteroids without prescription UK
https://infiniti32.ru
buy prednisolone MedRelief UK buy corticosteroids without prescription UK
https://mahiyanov.ru
https://en-as.ru
https://auto-trade-77.ru
https://krutyevirazhi.ru
https://angar-25.ru
Bold City Heating and Air are trusted experts in AC fixing and
installation, providing for Downtown Jacksonville, Jacksonville FL, with remarkable dedication. Downtown Jacksonville,
situated at approximately 30.3322° N latitude and 81.6557°
W longitude, is a vibrant urban core that includes key landmarks such as the Jacksonville Landing, Times-Union Center for the Performing Arts, and the Main Street Bridge.
With a population density of over 4,000 residents per square
mile and a balmy, humid subtropical climate averaging summer highs near 90°F, reliable air conditioning is essential.
Bold City Heating and Air recognize these local demands and
provide customized HVAC solutions to keep comfort in this
lively area. The mixed demographic, including families,
professionals, and retirees, counts on their
expertise to service both residential and commercial
AC systems. Additionally, the proximity to the St. Johns River and frequent summer thunderstorms demand HVAC units
that are durable and reliable, which Bold City
Heating and Air specialize in fitting and fixing.
Their knowledge of local infrastructure and climate factors guarantees
they meet the specific cooling needs of Downtown Jacksonville’s residents and businesses promptly and professionally.
https://marwapremium.ru
https://infiniti32.ru
натяжные потолки цены самара http://www.stretch-ceilings-samara.ru/ .
https://en-as.ru
BritPharm Online: viagra uk — viagra uk
https://minimood.ru
https://masterieltsonline.ru
https://auto-trade-77.ru
https://mahiyanov.ru
buy viagra: buy sildenafil tablets UK — buy sildenafil tablets UK
https://bassein-septic.ru
Great post. I was checking constantly this blog and I’m impressed! Extremely helpful information specially the last part 🙂 I care for such info much. I was seeking this particular information for a long time. Thank you and best of luck.
Feel free to surf to my web blog — https://theterritorian.Com.au/index.php?page=user&action=pub_profile&id=2493973
https://minimood.ru
โพสต์นี้ อ่านแล้วได้ความรู้เพิ่ม ค่ะ
ผม เคยติดตามเรื่องนี้จากหลายแหล่ง เรื่องที่เกี่ยวข้อง
เข้าไปดูได้ที่ สล็อต
สำหรับใครกำลังหาเนื้อหาแบบนี้
มีการยกตัวอย่างที่เข้าใจง่าย
ขอบคุณที่แชร์ ข้อมูลที่ช่วยให้เข้าใจเรื่องนี้มากขึ้น นี้
หวังว่าจะมีการอัปเดตเนื้อหาเพิ่มเติมเร็วๆ นี้
https://berezovo142.ru
https://karvy.ru
my blog … All Hacksaw Gaming games in one Place
https://detsad40.ru
Also visit my blog All Spadegaming games in one Place
https://marwapremium.ru
https://telegra.ph/Benzogenerator-kupit-sevastopol-10-12-2
https://telegra.ph/Kupit-kryshku-obektiva-na-teplovizor-ajrej-35-10-12-4
https://telegra.ph/Kvadrokoptery-dji-mavic-3-kupit-10-12-4
https://telegra.ph/Fpv-dron-7-kupit-10-13-3
https://telegra.ph/Kupit-zashchitnyj-shlem-voennyj-10-12-5
https://telegra.ph/Kupit-benzogenerator-subaru-10-13-2
https://telegra.ph/Dji-pocket-3-kupit-v-spb-10-13
https://telegra.ph/Dji-neo-pult-kupit-10-12-5
https://telegra.ph/Kupit-bronezhilet-oblegchennyj-br5-10-12
https://telegra.ph/Kupit-teplovizor-v-tyumeni-10-13-2
amoxicillin uk: generic amoxicillin — buy amoxicillin
my homepage :: m1bar.com
private online pharmacy UK: online pharmacy — UK online pharmacy without prescription
http://amoxicareonline.com/# buy amoxicillin
8S
https://britmedsdirect.shop/# UK online pharmacy without prescription
my web-site — High Stakes Poker
Amoxicillin online UK: buy amoxicillin — UK online antibiotic service
https://medreliefuk.shop/# UK chemist Prednisolone delivery
UK online antibiotic service generic amoxicillin generic Amoxicillin pharmacy UK
Для жителей Москвы и ее окрестностей доступна удобная алкоголь 24 часа прямо до двери, что делает процесс приобретения напитков максимально комфортным и быстрым.
становится все более популярной услугой среди жителей города, которые ценят свое время и хотят получить качественные напитки без выхода из дома. Эта услуга позволяет жителям Москвы не тратить время на поездку в магазин и подбор подходящих напитков. Кроме того, доставка алкоголя дает возможность выбрать из широкого ассортимента от различных производителей.
Доставка алкоголя в Москве осуществляется компаниями , которые заботятся о качестве обслуживания и удовлетворении потребностей клиентов. Клиенты имеют возможность сделать заказ через интернет и получить его в кратчайшие сроки. Это очень удобно тем, у кого нет времени на посещение магазинов.
Доставка алкоголя в Москве предлагает множество преимуществ для клиентов. Во-первых, это экономия времени на поездку в магазин и обратно. Во-вторых, клиенты имеют доступ к широкому выбору напитков, что упрощает поиск нужного напитка . Кроме того, доставка алкоголя производится в выбранное клиентом время, что значительно улучшает качество обслуживания .
Доставка алкоголя в Москве также обеспечивает безопасность клиентов, поскольку они не должны покидать свой дом и рисковать здоровьем. Это особенно важно в периоды повышенной опасности для здоровья. Компании, предоставляющие услуги доставки, гарантируют высокое качество продукции , что укрепляет доверие к компании .
При выборе компании для доставки алкоголя в Москве необходимо учитывать несколько факторов . Во-первых, это авторитет фирмы , которая может быть оценена по отзывам . Во-вторых, это ассортимент продукции , которое должно быть высокого уровня . В-третьих, это уровень сервисного обслуживания, который должен отвечать ожиданиям клиентов.
Компании, предоставляющие услуги доставки алкоголя в Москве, должны иметь соответствующие документы на осуществление деятельности. Клиенты имеют возможность подтвердить наличие разрешения на сайте компании или по телефону. Это обеспечивает законность деятельности компании и обеспечивает защиту интересов клиентов при покупке и доставке алкоголя.
Доставка алкоголя в Москве становится все более популярной услугой среди жителей города. Эта услуга имеет несколько плюсов , включая экономию времени , большой выбор напитков , и условия для безопасной покупки. При выборе компании для доставки алкоголя нужно принять во внимание доверие компании, качество напитков , и качество сервиса . Компании, предоставляющие услуги доставки алкоголя, должны иметь соответствующие документы и гарантировать высокое качество продукции .
Компания специализируется на нерудные строительные материалы, что делает ее лидером в сфере поставок сыпучих материалов для строительной отрасли.
играют ключевую роль в современном строительстве . Они применяются для создания различных строительных конструкций . Кроме того, нерудные материалы должны быть безопасны для использования.
Нерудные материалы могут быть использованы в различных условиях. Они могут быть использованы для создания уникальных дизайнов . Кроме того, нерудные материалы должны быть использованы с учетом их свойств и характеристик .
Нерудные материалы могут быть классифицированы по своим свойствам и характеристикам . Они могут быть использованы для создания уникальных дизайнов. Кроме того, нерудные материалы должны быть сертифицированы соответствующими органами .
Нерудные материалы такие как песок, гравий и щебень . Они могут быть применены в различных сферах промышленности . Кроме того, нерудные материалы должны быть применены с учетом условий эксплуатации.
Нерудные материалы могут быть использованы в различных условиях. Они могут быть использованы для создания уникальных дизайнов . Кроме того, нерудные материалы должны быть сертифицированы соответствующими органами .
Нерудные материалы имеют свои уникальные свойства и характеристики . Они могут быть использованы для создания уникальных дизайнов . Кроме того, нерудные материалы должны быть использованы с учетом их свойств и характеристик .
Нерудные материалы будут иметь большое значение для различных отраслей промышленности . Они могут быть использованы для создания уникальных дизайнов . Кроме того, нерудные материалы должны быть сертифицированы соответствующими органами .
Нерудные материалы будут применяться в новых условиях. Они могут быть применены в различных сферах промышленности . Кроме того, нерудные материалы должны быть выбраны с учетом требований проекта .
Для тех, кто интересуется нумерологией по дате рождения, существует возможность нумерология по дате рождения рассчитать бесплатно с расшифровкой предназначение, что может открыть новые перспективы в понимании себя и своих жизненных целей.
Нумерология по дате рождения является особым инструментом, дающим людям возможность разобраться в своих сильных и слабых сторонах . Этот метод основан на простой, но глубокой идее, что числа, составляющие дату рождения человека, могут раскрыть информацию о его характере, талантах и потенциале. Нумерология по дате рождения имеет богатую историю и применялась разными цивилизациями для понимания тайн вселенной . Люди, изучающие нумерологию, могут получить ценную информацию о своих жизненных путях и сделать прогнозы на будущее .
Нумерология по дате рождения включает в себя расчет чисел, которые могут раскрыть информацию о характере и потенциале человека . Число жизни является ключевым числом, которое может раскрыть информацию о характере и судьбе человека. Нумерология по дате рождения основана на анализе месяца и года рождения, что может дать представление о будущем человека.
Числа в нумерологии имеют особое значение и могут раскрыть информацию о характере и потенциале человека . Каждое число в нумерологии является важным элементом, который может дать представление о судьбе человека. Нумерология по дате рождения включает в себя анализ чисел от 1 до 9, которые могут дать информацию о характере и потенциале человека . Число 1 в нумерологии является числом лидера и может дать информацию о характере и потенциале человека .
Нумерология по дате рождения включает в себя анализ мастер-чисел, которые могут дать представление о судьбе человека. Мастер-числа в нумерологии являются ключевыми элементами, которые могут помочь людям понять свою судьбу. Нумерология по дате рождения может помочь людям понять свое предназначение и сделать прогнозы на будущее .
Нумерология по дате рождения может быть использована для понимания сильных и слабых сторон человека и сделать прогнозы на будущее . Нумерология по дате рождения может помочь людям понять свои сильные и слабые стороны, что может быть полезно в отношениях и личной жизни . Нумерология по дате рождения может помочь людям понять свои сильные и слабые стороны, что может быть полезно в личной жизни и отношениях .
Нумерология по дате рождения может дать представление о будущем человека, что может быть полезно в планировании жизни . Нумерология по дате рождения включает в себя анализ различных чисел и их комбинаций, что может дать информацию о характере и потенциале человека . Нумерология по дате рождения позволяет людям разобраться в своих сильных сторонах и слабостях и сделать прогнозы на будущее.
Нумерология по дате рождения является уникальным инструментом, который может помочь людям понять свою судьбу и сделать прогнозы на будущее . Нумерология по дате рождения является древним искусством, позволяющим людям проникнуть в тайны числа и раскрыть скрытые истины. Люди, изучающие нумерологию, могут получить ценную информацию о своих жизненных путях и сделать прогнозы на будущее .
Here is my blog post :: http://www.Comfortvps.com
Для тех, кто ищет удобную и быструю доставка алкоголя химки в Химках, теперь есть отличный вариант, позволяющий получить алкоголь прямо на дом в кратчайшие сроки.
все более популярной в последнее время в связи с развитием онлайн-платформ и сервисов доставки. Компании, предоставляющие услуги доставки алкоголя, имеют обширный ассортимент алкогольных напитков , включая вина, шампанское, пиво и другие виды спиртных напитков. Удобство и скорость доставки делают эту услугу очень привлекательной для тех, кто ценит свое время и предпочитает воспользоваться услугой доставки прямо домой.
Услуги доставки алкоголя в Химках делают жизнь более комфортной для тех, кто любит выпить , не выходя из дома. Это особенно важно для тех, кто любит устраивать вечеринки. Кроме того, многие компании имеют оперативную службу поддержки , готовых ответить на все вопросы и помочь с выбором напитков.
Преимущества доставки алкоголя в Химках являются значимыми и разнообразными. Во-первых, это экономия времени и сил, поскольку вам не нужно тратить время на поездку в магазин. Во-вторых, высокое качество обслуживания обеспечивают, что ваш заказ будет выполнен быстро и профессионально. В-третьих, широкий выбор продуктов позволяет найти именно то, что вы ищете.
Компании, занимающиеся доставкой алкоголя, постоянно совершенствуют свои услуги , чтобы клиенты могли наслаждаться оперативностью и качеством . Это включает в себя регулярные акции и скидки , которые делают услугу еще более привлекательной. Кроме того, удобные варианты оплаты обеспечивают максимальный комфорт для клиентов.
Заказать доставку алкоголя в Химках довольно просто и удобно . Вам необходимо открыть сайт доставки, где вы сможете ознакомиться с предложениями и ценами. Затем вы можете сделать заказ онлайн , выбрав нужные напитки и указав адрес доставки.
После подтверждения заказа, операторы компании свяжутся с вами , чтобы подтвердить ваш заказ и обсудить детали доставки. Это позволяет обеспечить максимальное качество обслуживания. Ademas, компании следят за качеством напитков , чтобы клиенты получили самые лучшие напитки .
В заключении, доставка алкоголя в Химках представляет собой очень удобный и комфортный способ получить любимые напитки без необходимости выхода из дома. Удобство, скорость и качество сервиса и выбор алкоголя делают эту услугу достаточно привлекательной и комфортной . Если вы ищете удобный и быстрый способ насладиться алкоголем в Химках, то это будет Ваш лучший выбор.
buy amoxicillin: buy amoxicillin — buy penicillin alternative online
UK online antibiotic service Amoxicillin online UK cheap amoxicillin
https://amoxicareonline.shop/# generic amoxicillin
Prednisolone tablets UK online: buy prednisolone — buy corticosteroids without prescription UK
https://amoxicareonline.shop/# generic amoxicillin
https://telegra.ph/Gde-mozhno-kupit-bronezhilet-10-13-3
https://telegra.ph/Kollimatornyj-pricel-kupit-ceny-10-14
https://telegra.ph/Kupit-bronezhilet-pancir-pro-sso-10-13-3
https://telegra.ph/Benzogenerator-kupit-v-nizhnem-10-13-3
https://telegra.ph/Vsenapravlennyj-detektor-dronov-bulat-10-14
Helpful page about king county adu requirements. Great for a quick orientation. Worth saving if you’re comparing options.
глория мебель kuhni-spb-3.ru .
Need this topic? Start with adu designer near me. It outlines the basics without fluff. Good starting point before deeper digging.
https://telegra.ph/Kupit-bronezhilet-multikam-10-13-3
Also visit my webpage … Superlotto Online Slots with verified RTP
https://telegra.ph/Komplekt-starlink-kupit-10-13
Brit Meds Direct online pharmacy UK online pharmacy without prescription
https://telegra.ph/Kupit-benzogenerator-subaru-10-12-6
https://telegra.ph/Teplovizor-pard-35-kupit-10-12-5
https://telegra.ph/Usiliteli-signala-kupit-v-minske-10-13-2
https://telegra.ph/Kupit-opticheskie-pricely-v-krymu-10-13-3
MedicoSur: mexican pharmacy — mexican pharmacy
https://medicosur.com/# mexico pharmacy list
https://telegra.ph/Raciya-bulat-kupit-10-12-5
https://telegra.ph/Teplovizor-t2-kupit-10-13-2
https://telegra.ph/EHrik-bulatov-kartiny-kupit-10-12-4
https://telegra.ph/Binokl-kupit-v-cheboksarah-10-12-5
Cialis online USA: TadaLife Pharmacy — generic Cialis online pharmacy
https://telegra.ph/Dji-mavic-3-cine-kupit-10-12-2
https://telegra.ph/Mavic-2s-kupit-10-14
https://telegra.ph/Kupit-promyshlennyj-kvadrokopter-10-14
https://telegra.ph/Autel-evo-2-dual-640t-kupit-10-13
https://telegra.ph/Mavic-mini-3-pro-kupit-10-12-2
https://telegra.ph/Telefon-zashchishchennyj-s-teplovizorom-kupit-10-14
https://telegra.ph/Kupit-monokulyary-levenhuk-10-13-4
Для любителей цветов и садоводов теперь доступно приобрести высококачественные семена через семяныч купить, гарантируя успешный рост и пышное цветение ваших любимых растений.
идеальное решение для любителей садоводства и огородничества . Они предоставляют возможность выращивать различные сорта культур, от овощей до цветов . Выбор семян семяныч — это шаг к более здоровому и натуральному образу жизни.
Семяныч семена всегда есть в наличии, чтобы помочь вам в ваших садоводческих начинаниях. Они обеспечивают гарантию всхожести и развития растений. Купив семяныч семена, вы сможете поделиться опытом и радостью с друзьями и семьей.
Семяныч семена обеспечивают Plants с необходимыми питательными веществами для здорового роста. Они представлены в широком ассортименте, что позволяет выбрать подходящий сорт для любого климата и условий . Используя семяныч семена, вы сможете улучшить качество своей жизни и жизни окружающих .
При выборе семян семяныч важно учитывать климат и условия вашего региона . Семяныч семена помогут вам найти лучшее решение для ваших задач . С их помощью, вы получите возможность экспериментировать с новыми сортами и видами растений .
Если вы ищете, где купить семяныч семена, получите возможность заказать их напрямую от производителя. При покупке семян важно проверить качество и чистоту семян . Семяныч семена обеспечивают быструю и надежную доставку, что позволяет начать садоводство как можно скорее.
Купив семяныч семена, вы сможете наслаждаться процессом выращивания растений и наблюдать за их ростом. Семяныч семена обеспечивают гарантию всхожести и развития растений .
В заключение, семяныч семена обеспечивают высокое качество и надежность, что делает их лидерами среди других семян . Они дают возможность испытать радость от видения, как из небольшого семечка вырастает полноценное растение . Выбирая семяныч семена, вы сможете наслаждаться процессом выращивания растений и наблюдать за их ростом.
Семяныч семена помогут вам создать красивый и уникальный сад, отражающий ваш характер и стиль. Купив семяныч семена, вы сможете поделиться своим опытом и знаниями с другими.
Native Sons Home Services are established experts in bathroom remodeling,
serving the Annapolis, MD area, a city noted for its deep maritime history and proximity
to the Chesapeake Bay. Annapolis, located at approximately 38.9784°
N latitude and 76.4922° W longitude, is home to a mixed population of around 40,000 residents, many of whom seek superior home improvement services to enhance their living spaces.
Native Sons Home Services understand the unique architectural styles common in Annapolis,
including colonial and waterfront properties, allowing them to design bathroom remodels that blend functionality with the area’s historic charm.
The presence of notable landmarks such as the United States Naval Academy and the Maryland State House means many homeowners and renters in the area
require high-quality craftsmanship and attention to detail, which Native Sons Home Services always provide.
Additionally, with Annapolis experiencing seasonal humidity
and proximity to water, the company’s expertise in moisture-resistant materials
and ventilation solutions guarantees durable and stylish bathroom renovations.
By serving this specific region, Native Sons Home Services effectively address the
community’s needs, combining local knowledge with remodeling excellence to
remain the top choice for bathroom remodeling in Maryland’s Annapolis area.
https://telegra.ph/Kupit-korpus-mavik-3-10-14
mexico pharmacy MedicoSur MedicoSur
https://telegra.ph/Usilitel-sotovoj-svyazi-na-dachu-kupit-spb-10-12-5
https://telegra.ph/Pribor-nochnogo-videniya-kupit-v-chelyabinske-10-12
https://telegra.ph/Ajboks-fantom-radar-detektor-kupit-10-13-3
This is a very good tip particularly to those new to the blogosphere.
Brief but very precise info? Appreciate yoour sharing this one.
A musat read post!
Takke a look att my blog post: Real estate brokerage
https://medicosur.com/# MedicoSur
buy Doxycycline: buy propecia — buy Doxycycline
http://zencaremeds.com/# order medicine discreetly USA
производство пластиковых окон становится все более популярной среди домашних и коммерческих застройщиков благодаря своей энергоэффективности и долговечности.
являются одним из наиболее популярных видов окон в современном строительстве . Они предлагают высокую степень теплоизоляции и энергосбережения . При этом могут быть установлены практически в любой тип здания.
Пластиковые окна изготавливаются из высококачественных материалов . Это обеспечивает им современный и стильный вид . Кроме того, они не требуют частого покраса или затрат на уход .
Одним из основных преимуществ пластиковых окон является их высокая степень энергосбережения . Это помогает снизить выбросы углекислого газа . Кроме того, пластиковые окна обеспечивают хорошую звукоизоляцию .
Пластиковые окна также известны своей высокой прочностью и устойчивостью к погодным условиям . Это делает их идеальным выбором для регионов с суровым климатом . Кроме того, не требуют специальных средств для ухода .
Пластиковые окна могут быть изготовлены в различных цветах и формах . Это позволяет выбрать окна, соответствующие стилю и архитектуре любого здания . При этом они оснащены современными системами открывания и закрывания .
Пластиковые окна могут включать в себя функции регулировки влажности . Это обеспечивает максимальную степень контроля над внутренней средой. Кроме того, они могут быть оснащены специальными стеклами, обеспечивающими дополнительную защиту от ультрафиолетового излучения .
В заключении, пластиковые окна предлагают широкий спектр преимуществ и возможностей . Они остаются одним из наиболее популярных видов окон. При этом должны учитывать все требования и пожелания заказчика.
Пластиковые окна останутся основным выбором для многих домовладельцев. Это потому что они сочетают в себе все необходимые качества и характеристики . Кроме того, их дальнейшее развитие и совершенствование будут направлены на увеличение их энергоэффективности и экологической безопасности .
Для организации незабываемого праздника илиorporate мероприятия в Новосибирске можно воспользоваться услугой машина с водителем в аренду, которая позволяет гостям наслаждаться поездкой без забот о вождении.
позволяет клиентам наслаждаться поездками без заботы о вождении. Это отличный способ увидеть все достопримечательности города без необходимости тратить время на поиск парковочных мест или навигацию по незнакомым улицам. Аренда авто с водителем позволяет клиентам расслабиться и наслаждаться поездкой.
Аренда авто с водителем в Новосибирске дает возможность клиентам создать незабываемые впечатления от поездки. Это особенно актуально для деловых поездок, когда время и комфорт имеют первостепенное значение. Аренда авто с водителем дает возможность быстро и комфортно добраться до места встречи .
Аренда авто с водителем в Новосибирске предоставляет широкий спектр преимуществ для клиентов . Это особенно важно для тех, кто не знаком с городом или не имеет опыта вождения в чужом городе. Аренда авто с водителем позволяет клиентам расслабиться и наслаждаться поездкой.
Аренда авто с водителем в Новосибирске дает возможность выбрать машину, подходящую для конкретных потребностей . Это может быть особенно важно для групповых поездок или для клиентов, которым необходим определенный уровень комфорта. Аренда авто с водителем позволяет клиентам наслаждаться поездкой без заботы о техническом обслуживании автомобиля.
Аренда авто с водителем в Новосибирске предлагает различные тарифные планы и условия для клиентов . Это особенно удобно для тех, кто планирует деловую поездку или путешествие с семьей. Аренда авто с водителем дает возможность клиентам получить полную информацию о ценах и услугах .
Аренда авто с водителем в Новосибирске позволяет клиентам наслаждаться поездкой с максимальным комфортом и минимальными затратами. Это особенно важно для тех, кто часто использует услуги аренды авто с водителем. Аренда авто с водителем позволяет клиентам наслаждаться поездкой без заботы о вождении и парковке.
Аренда авто с водителем в Новосибирске дает возможность клиентам наслаждаться поездкой без заботы о вождении . Это особенно важно для тех, кто ценит комфорт и безопасность на дороге. Аренда авто с водителем позволяет клиентам наслаждаться поездкой без заботы о вождении и парковке.
Аренда авто с водителем в Новосибирске предоставляет широкий спектр услуг для путешественников . Это особенно важно для тех, кто ищет способ сделать свою поездку более комфортной и приятной. Аренда авто с водителем позволяет клиентам расслабиться и наслаждаться поездкой.
Для тех, кто планирует улучшить свое жилое пространство, остекление и отделка лоджии под ключ цена может стать отличным решением, обеспечивая не только эстетическую привлекательность, но и практичность.
Остекление балконов позволяет создать дополнительное жилое пространство, которое можно использовать круглый год . Это связано с тем, что балконы часто используются как дополнительное жилое пространство балконы часто используются как место для отдыха и досуга . Кроме того, остекление балконов может giup?ить уровень шума и?? уровень безопасности остекление балконов может giup снизить уровень шума и повысить уровень безопасности .
Остекление балконов может быть выполнено с использованием различных материалов остекление балконов может быть выполнено с использованием алюминиевого профиля . Выбор материала зависит от личных предпочтений и дизайна квартиры выбор материала зависит от личных предпочтений и стиля квартиры .
Остекление балконов имеет множество преимуществ остекление балконов имеет значительные преимущества. Одним из основных преимуществ является возможность использовать балкон круглый год одним из основных преимуществ является возможность использовать балкон в любое время года . Кроме того, остекление балконов может giup повысить уровень энергосбережения остекление балконов может giup повысить уровень энергосбережения.
Остекление балконов также может giup повысить уровень безопасности остекление балконов также может giup повысить уровень защиты. Это связано с тем, что остекление балконов может giup предотвратить проникновение в квартиру посторонних лиц остекление балконов может giup предотвратить проникновение в квартиру незнакомых людей .
После остекления балконов необходимо начать отделку после остекления балконов необходимо начать внутреннюю отделку . Отделка балконов может быть выполнена с использованием различных материалов отделка балконов может быть выполнена с использованием обоев .
Выбор материала зависит от личных предпочтений и дизайна квартиры выбор материала зависит от личных предпочтений и стиля квартиры . Кроме того, отделка балконов может включать установку освещения отделка балконов может включать установку напольного освещения.
Отделка балконов также может включать установку мебели отделка балконов также может включать установку деревянной мебели . Выбор мебели зависит от личных предпочтений и стиля квартиры выбор мебели зависит от личных предпочтений и планировки квартиры.
В заключение, остекление и отделка балконов является важным шагом в улучшении эстетики и функциональности квартиры в заключение, остекление и отделка балконов является необходимым шагом в повышении уровня безопасности и энергосбережения. Остекление балконов может giup повысить уровень комфорта и уюта в доме остекление балконов может giup уменьшить уровень энергозатрат и повысить уровень энергосбережения .
Отделка балконов после остекления является важным шагом в создании уютного и функционального пространства отделка балконов после остекления является необходимым шагом в повышении уровня безопасности и энергосбережения. Выбор материала и мебели зависит от личных предпочтений и дизайна квартиры выбор материала и мебели зависит от личных предпочтений и стиля квартиры .
Остекление и отделка балконов может быть выполнено с использованием различных материалов и технологий остекление и отделка балконов может быть выполнено с использованием дерева и напольного освещения. Всего остекление и отделка балконов является важным шагом в создании дополнительного жилья.
Для тех, кто планирует деловую поездку или просто хочет исследовать город в комфорте, аренда авто с водителем становится идеальным решением, обеспечивая безопасность, комфорт и гибкость в планировании маршрута.
Услуги аренды авто с водителем в Новосибирске предназначены для обеспечения безопасных и комфортных поездок. Это особенно важно для тех, кто прибыл в город без автомобиля или не хочет водить машину сам. Компании, предлагающие аренду авто с водителем, работают над тем, чтобы клиенты могли наслаждаться поездкой, не беспокоясь о проблемах с парковкой или пробками .
Для тех, кто ищет премиум-услуги, доступны автомобили представительского класса с опытными водителями . Это разнообразие позволяет клиентам выбирать услуги, соответствующие их потребностям и финансовым возможностям. Услуги аренды авто с водителем могут быть заказаны онлайн или по телефону.
Это особенно важно для туристов, которые не?ы с городом. Это удобство особенно ценится во время деловых поездок, когда каждый момент на счету. Кроме того, наличие водителя позволяет клиентам наслаждаться пейзажем или заниматься делами во время поездки .
Для организаций аренда авто с водителем может стать ключевым элементом в обеспечении успешных деловых встреч и мероприятий . Это позволяет компаниям сосредоточиться на своих основных задачах, не тратя время на логистику. Услуги аренды авто с водителем включают в себя не только перевозку, но и помощь в организации мероприятий.
При выборе компании для аренды авто с водителем в Новосибирске необходимо учитывать несколько факторов, включая репутацию компании и качество обслуживания . Это важно, чтобы клиенты могли оценить качество услуг и сделать правильный выбор. Услуги аренды авто с водителем в Новосибирске должны соответствовать индивидуальным потребностям каждого клиента.
Опыт и квалификация водителей также являются важными факторами. Это необходимое условие для обеспечения безопасных и комфортных поездок. Кроме того, компании должны иметь четкую политику в отношении оплаты и условий аренды, чтобы клиенты могли понимать, что они получают за свои деньги .
Это особенно важно для тех, кто ценит время и комфорт . Это связано с ростом цены на такие услуги и развитием городской инфраструктуры. Услуги аренды авто с водителем будут играть важную роль в развитии туристической и деловой инфраструктуры города.
Услуги аренды авто с водителем в Новосибирске подходят для всех, кто хочет путешествовать с комфортом и безопасностью. Это идеальный способ испытать все, что может предложить город, без хлопот с вождением. Аренда авто с водителем в Новосибирске станет еще более популярной и доступной услугой .
Качество вышка, доставка до вашего города обговаривается индивидуально с ТС!
https://telegra.ph/Dji-mic-kupit-10-12
бро я не как не пойму как фейк мне лс отвечал здесь
Also visit my web blog … Evoplay Games – play For real money
«Выстовляет Эскимос список тестеров в Списке сверкает мой ник» «bob marli»
https://telegra.ph/Otvod-ot-benzogeneratora-kupit-10-14-2
Да трек получил, но я не про это я про задержки, сейчас у них все должно быть ровно
ZenCareMeds order medicine discreetly USA trusted online pharmacy USA
MedicoSur: order medication from mexico — mexico pharmacy
ZenCare Meds com canadien pharmacies canadian pharmacy no prescription
TadaLife Pharmacy: generic Cialis online pharmacy — affordable Cialis with fast delivery
с радостью сообщаю что посыль пришла в мой солнечный город,и я рад…не только потому что она дошла а тому что всю длинную дорогу (10дней)со мной оставался на связи магазин,работает без всяких проволочек,без гемора свойственного многим магазинам,всё дошло конспирация на наивысшем уровне как и сам магазин,ребята удачных вам продаж и многолетнего существования
https://telegra.ph/Monokulyar-bushnell-16×52-kupit-10-12-4
Здравствуйте, есть и 50 и 100, сейчас откорректирую, можете заказывать уже
My web site Anneliese
http://zencaremeds.com/# online pharmacy
ZenCareMeds ZenCareMeds best online pharmacy for viagra
mexico farmacia: mexican pharmacy — mexican pharmacy
Дело не в постах. В любом случае нужно быть осторожным. И строить систему сложнее…
https://telegra.ph/Invertornyj-generator-25-kvt-benzinovyj-kupit-10-13-3
Заметила, что магазин куда-то пропадал, но сейчас появился, чему очень рада)
https://medicosur.com/# mexico pharmacy
mexican mail order pharmacy: MedicoSur — mexican pharmacy
safe online medication store: canadian pharmacy levitra value pack — buy Doxycycline
Какое палево ты очём?
https://telegra.ph/Rehb-romashka-8-kanalov-kupit-10-12
ВСЕМ САЛЮТ!!! :hello:
желаю и дальше продолжать в том же духе!))
https://telegra.ph/Kupit-mini-binokl-10-12-5
Я айтишник и к СМ не отношусь никаким боком. Про мою работу вы не знали и не узнали бы, если бы всё срослось. Я просто говорю про то, что не так уж и секурно у вас, личность выпаливается «на раз».
cialis: TadaLife Pharmacy — cialis
https://tadalifepharmacy.com/# generic Cialis online pharmacy
https://medicosur.shop/# mexico pharmacy
Hello everyone, it’s my first pay a visit at this site, and piece of writing is genuinely fruitvul in support oof me,
keep up posting these type of articles.
Here is myy web-site; Certified solar panel Installer
online pharmacy: sure save pharmacy — ZenCare Meds
generic Cialis online pharmacy: affordable Cialis with fast delivery — tadalafil tablets without prescription
Еще раз извините. Треки тоже бьются не сразу, курьерки «в завалах», иногда он только начинает определяться на сайте курьерки, а его уже вручают или вручили получателю. Не пугайтесь, что мониторинг начнется не сразу, вам всем все придет заказанное.
https://telegra.ph/Kupit-binokl-komz-8h30-10-12-2
Нет сомнения
my webpage :: free Poker
сорь за флуд)))
https://telegra.ph/Dji-avata-pro-view-combo-kupit-10-13-2
отличный магазин, качество супер ,товар радует
buy Doxycycline buy amoxil safe online medication store
mexican pharmacy: mexico medication — pharmacy in mexico that ships to us
Feel free to surf to my web page … poker Online
Если вы ищете качественные семена различной марки, включая семяныч семена купить, то вы можете найти их в специализированных магазинах или интернет-магазинах, предлагающих широкий ассортимент семян для различных культур.
Семяныч семена можно купить в различных магазинах и интернет-магазинах . Это связано с тем, что семена являются основой для выращивания здоровых растений. Семена необходимо хранить в сухом и прохладном месте. Кроме того, семена необходимо проверять на наличие вредителей и заболеваний .
Семяныч семена должны быть устойчивыми к болезням и вредителям. Семена должны быть свежими и иметь высокий процент всхожести. Кроме того, семена можно купить в интернет-магазинах или в специализированных магазинах .
Семяныч семена должны быть устойчивыми к болезням и вредителям. Семена необходимо хранить в сухом и прохладном месте. Кроме того, семена необходимо проверять на наличие вредителей и заболеваний .
Семяныч семена необходимо выбирать с учетом погодных условий и типа почвы. Семена нужно выбирать с учетом климата и региона, в котором они будут выращиваться . Кроме того, семена необходимо проверять на наличие вредителей и заболеваний .
АА Все братишки, мне уже отослали сегодня, спасибо что успокоили!
https://telegra.ph/Dji-air-2s-combo-kupit-10-12-5
мне менеджер сказал, что у другого спросит по поводу мхе и выдаст компенсации.
http://medicosur.com/# MedicoSur
test and tren cycle side effects
References:
https://git.obo.cash/pilar37d629976
https://telegra.ph/Kupit-videoregistrator-s-radar-detektorom-10-12
http://zencaremeds.com/# ZenCareMeds
This design is wicked! You obviously know how to keep a reader amused.
Between your wit and your videos, I was almost moved to start my own blog (well,
almost…HaHa!) Fantastic job. I really enjoyed what you
had to say, and more than that, how you presented it. Too cool!
Also visit my blog post … poker Stake
what effect can the use of steroids have on men
References:
https://tunelifystream.com/antonytcv21932
Feel free to surf to my web site — free poker
https://telegra.ph/Invertornyj-generator-kupit-v-voronezhe-10-13-4
bulking testosterone
References:
https://napvibe.com/read-blog/53747_somatropin-hgh-zum-kauf-rabattcode-20-im-jahr-2024.html
https://telegra.ph/Kupit-bulat-4-v-donecke-10-12-4
Для организации незабываемого праздника илиorporate мероприятия в Новосибирске можно воспользоваться услугой прокат авто с водителем новосибирск, которая позволяет гостям наслаждаться поездкой без забот о вождении.
является отличным вариантом для тех, кто хочет с комфортом путешествовать по городу . Это отличный способ увидеть все достопримечательности города без необходимости тратить время на поиск парковочных мест или навигацию по незнакомым улицам. Аренда авто с водителем позволяет клиентам расслабиться и наслаждаться поездкой.
Аренда авто с водителем в Новосибирске дает возможность клиентам создать незабываемые впечатления от поездки. Это особенно актуально для деловых поездок, когда время и комфорт имеют первостепенное значение. Аренда авто с водителем обеспечивает высокий уровень сервиса и комфорта во время поездки.
Аренда авто с водителем в Новосибирске дает возможность наслаждаться поездкой без заботы о вождении и парковке . Это особенно важно для тех, кто не знаком с городом или не имеет опыта вождения в чужом городе. Аренда авто с водителем обеспечивает безопасность на дороге .
Аренда авто с водителем в Новосибирске обеспечивает высокий уровень комфорта и сервиса во время поездки. Это может быть особенно важно для групповых поездок или для клиентов, которым необходим определенный уровень комфорта. Аренда авто с водителем дает возможность клиентам получить ответы на все вопросы и решить любые проблемы .
Аренда авто с водителем в Новосибирске позволяет клиентам заказать машину на срок от нескольких часов до нескольких дней. Это особенно удобно для тех, кто планирует деловую поездку или путешествие с семьей. Аренда авто с водителем обеспечивает прозрачность и ясность в вопросах оплаты и условий .
Аренда авто с водителем в Новосибирске предоставляет специальные предложения и скидки для постоянных клиентов . Это особенно важно для тех, кто часто использует услуги аренды авто с водителем. Аренда авто с водителем обеспечивает высокий уровень сервиса и комфорта во время поездки .
Аренда авто с водителем в Новосибирске является отличным вариантом для тех, кто хочет с комфортом путешествовать по городу . Это особенно важно для тех, кто ценит комфорт и безопасность на дороге. Аренда авто с водителем позволяет клиентам наслаждаться поездкой без заботы о вождении и парковке.
Аренда авто с водителем в Новосибирске предоставляет широкий спектр услуг для путешественников . Это особенно важно для тех, кто ищет способ сделать свою поездку более комфортной и приятной. Аренда авто с водителем дает возможность клиентам наслаждаться пейзажами и достопримечательностями без отвлечения на вождение .
Для тех, кто нуждается в высококачественных услугах перевода, компания бюро переводов апостиль предлагает широкий спектр переводческих услуг, включая перевод документов, технический перевод и многое другое.
Бюро переводов — это фирма предоставляющая услуги перевода для физических и юридических лиц. Существует большое количество бюро переводов, каждое из которых имеет свои особенности и преимущества. Некоторые бюро переводов специализируются на переводе технических текстов, другие занимаются переводом литературных произведений. Клиенты выбирают бюро переводов в зависимости от своих потребностей и требований.
Кроме того, бюро переводов может предоставлять услуги по локализации контента для различных регионов и стран.
Бюро переводов может переводить даже устную речь, например, на конференциях и мероприятиях.
Бюро переводов может предоставлять услуги по локализации контента, что помогает клиентам адаптировать свои продукты или услуги для различных регионов и стран.
Бюро переводов гарантирует конфиденциальность и безопасность информации клиентов.
Для тех, кто планирует деловую поездку или просто хочет исследовать город в комфорте, аренда авто в новосибирске с водителем становится идеальным решением, обеспечивая безопасность, комфорт и гибкость в планировании маршрута.
Аренда авто с водителем в Новосибирске становится все более популярной среди туристов и жителей города, которые ценят комфорт и удобство . Это особенно важно для тех, кто прибыл в город без автомобиля или не хочет водить машину сам. Компании, предлагающие аренду авто с водителем, работают над тем, чтобы клиенты могли наслаждаться поездкой, не беспокоясь о проблемах с парковкой или пробками .
Для тех, кто ищет премиум-услуги, доступны автомобили представительского класса с опытными водителями . Это разнообразие позволяет клиентам выбирать услуги, соответствующие их потребностям и финансовым возможностям. Услуги аренды авто с водителем могут быть заказаны онлайн или по телефону.
Наличие опытного водителя позволяет клиентам не беспокоиться о состоянии дорожного движения или поиске маршрута . Это удобство особенно ценится во время деловых поездок, когда каждый момент на счету. Аренда авто с водителем также обеспечивает безопасность клиентов, поскольку водители хорошо знают дороги и могут справиться с любыми ситуациями на дороге .
Это особенно важно для иностранных гостей или высокопоставленных лиц . Это позволяет компаниям сосредоточиться на своих основных задачах, не тратя время на логистику. Аренда авто с водителем в Новосибирске может быть заказана заранее, чтобы обеспечить отсутствие проблем в день мероприятия .
Уровень обслуживания и качество автомобилей также играют большую роль. Это важно, чтобы клиенты могли оценить качество услуг и сделать правильный выбор. Некоторые компании могут предлагать скидки или акции, которые стоит учитывать при выборе .
Это гарантирует, что клиенты получают услуги высокого качества и безопасности . Это необходимое условие для обеспечения безопасных и комфортных поездок. Кроме того, компании должны иметь четкую политику в отношении оплаты и условий аренды, чтобы клиенты могли понимать, что они получают за свои деньги .
Это особенно важно для тех, кто ценит время и комфорт . Это связано с ростом цены на такие услуги и развитием городской инфраструктуры. Аренда авто с водителем в Новосибирске станет еще более доступной и удобной .
Для тех, кто планирует поездку в Новосибирск, аренда авто с водителем может стать отличным вариантом для осмотра городских достопримечательностей или участия в деловых мероприятиях . Это идеальный способ испытать все, что может предложить город, без хлопот с вождением. Аренда авто с водителем в Новосибирске станет еще более популярной и доступной услугой .
buy Doxycycline: buy amoxil — buy Doxycycline
mexico pharmacy: MedicoSur — mexico pharmacy
safe online pharmacy for Cialis safe online pharmacy for Cialis Cialis online USA
https://telegra.ph/Usilitel-sotovoj-svyazi-kupit-v-orle-10-13-4
Lumina Solar serves Charles County, MD, an area with a number of
residents of approximately 166,000 residents and an average household income of $85,000.
The county’s varied housing stock, including single-family homes and
new developments near Waldorf, presents a major opportunity
for solar energy solutions. Lumina Solar’s proficiency is evident in their personalized installations that
maximize energy efficiency for homes and businesses
alike in this region. Charles County’s geographic coordinates,
roughly 38.58°N latitude and 77.10°W longitude, benefit from an average of 213
bright days per year, making solar panel systems highly effective.
By serving this area, Lumina Solar helps residents reduce reliance on traditional
energy sources, cutting utility costs in a county
where the average residential electric bill is around $130 per month.
Points of interest such as the Regency Furniture Stadium
and the expansive Patuxent River Park highlight the county’s
commitment to community and sustainability, aligning with
Lumina Solar’s mission to promote renewable energy.
Their deep understanding of Charles County’s demographics, climate, and energy needs positions them as top experts in solar
panel installation within this service area.
most effective legal steroid
References:
https://www.tmip.com.tr/@hesterlemieux?page=about
ZenCare Meds: order medicine discreetly USA — ZenCare Meds com
https://telegra.ph/Dji-2-kupit-10-12-4
MedicoSur phentermine in mexico pharmacy mexican pharmacy
can prednisone build muscle
References:
https://gogs.melontalk.com.cn/dominickcoode
https://telegra.ph/Binokli-bolshoj-kratnosti-kupit-10-11
arnold schwarzenegger use steroid
References:
https://git.cukak.com/alejandrosmart
https://telegra.ph/Kupit-kvadrokopter-na-radioupravlenii-s-kameroj-10-13
melbet ru официальный сайт melbetbonusy.ru .
Для тех, кто планирует улучшить свое жилое пространство, остекление и отделка балконов под ключ может стать отличным решением, обеспечивая не только эстетическую привлекательность, но и практичность.
Остекление балконов позволяет создать дополнительное жилое пространство, которое можно использовать круглый год . Это связано с тем, что балконы часто используются как дополнительное жилое пространство балконы часто используются как место для размышлений и созерцания. Кроме того, остекление балконов может giup?ить уровень шума и?? уровень безопасности остекление балконов может giup уменьшить уровень шума и?? уровень комфорта .
Остекление балконов может быть выполнено с использованием различных материалов остекление балконов может быть выполнено с использованием пластикового профиля . Выбор материала зависит от личных предпочтений и дизайна квартиры выбор материала зависит от личных предпочтений и планировки квартиры.
Остекление балконов имеет множество преимуществ остекление балконов имеет несколько преимуществ . Одним из основных преимуществ является возможность использовать балкон круглый год одним из основных преимуществ является возможность использовать балкон без ограничений. Кроме того, остекление балконов может giup повысить уровень энергосбережения остекление балконов может giup уменьшить уровень энергозатрат .
Остекление балконов также может giup повысить уровень безопасности остекление балконов также может giup снизить уровень риска . Это связано с тем, что остекление балконов может giup предотвратить проникновение в квартиру посторонних лиц остекление балконов может giup предотвратить проникновение в квартиру посторонних элементов.
После остекления балконов необходимо начать отделку после остекления балконов необходимо начать внутреннюю отделку . Отделка балконов может быть выполнена с использованием различных материалов отделка балконов может быть выполнена с использованием обоев .
Выбор материала зависит от личных предпочтений и дизайна квартиры выбор материала зависит от личных предпочтений и цвета квартиры . Кроме того, отделка балконов может включать установку освещения отделка балконов может включать установку светодиодного освещения .
Отделка балконов также может включать установку мебели отделка балконов также может включать установку мягкой мебели . Выбор мебели зависит от личных предпочтений и стиля квартиры выбор мебели зависит от личных предпочтений и планировки квартиры.
В заключение, остекление и отделка балконов является важным шагом в улучшении эстетики и функциональности квартиры в заключение, остекление и отделка балконов является необходимым шагом в повышении уровня безопасности и энергосбережения. Остекление балконов может giup повысить уровень комфорта и уюта в доме остекление балконов может giup уменьшить уровень энергозатрат и повысить уровень энергосбережения .
Отделка балконов после остекления является важным шагом в создании уютного и функционального пространства отделка балконов после остекления является необходимым шагом в повышении уровня безопасности и энергосбережения. Выбор материала и мебели зависит от личных предпочтений и дизайна квартиры выбор материала и мебели зависит от личных предпочтений и цвета квартиры .
Остекление и отделка балконов может быть выполнено с использованием различных материалов и технологий остекление и отделка балконов может быть выполнено с использованием алюминиевого профиля и светодиодного освещения . Всего остекление и отделка балконов является важным шагом в улучшении эстетики и функциональности квартиры .
https://medicosur.com/# medication in mexico
https://telegra.ph/Opticheskie-pricely-kupit-v-moskve-10-14
tadalafil tablets without prescription: buy cialis online — cialis
https://telegra.ph/Mobilnaya-stanciya-monitoringa-dji-kupit-10-13-3
mexico pharmacy: MedicoSur — mexico pharmacy
https://telegra.ph/Monokulyar-teplovizor-kupit-ozon-10-13-3
Honey Sugaring and Facials is the premier place for
skin treatments and sugaring hair removal in Missoula MT. The brand is recognized for its
outstanding support and professional specialists who provide a
pleasant and effective experience every time. Their sugaring hair removal technique is kind
on the skin, suitable for sensitive skin types and offering
long-lasting smooth results. Clients enjoy the organic
components used in the sugaring paste which reduces irritation and promotes healthy skin. Honey Sugaring
and Facials has a range of skin care treatments tailored to
meet individual skin needs, from thorough cleansing to nourishing and age-defying facials.
Each session is designed to renew and invigorate the complexion, helping clients appear and feel
refreshed. The welcoming atmosphere and courteous team offer
a calm setting perfect for personal care and relaxation. The attention to detail and promise of high
standards distinguish Honey Sugaring and Facials from other
beauty centers in the area. They use the cutting-edge technology and beauty products
to maintain the highest standards of care. Every client gets customized service to address their unique skin concerns, creating
a unique experience each time. The regular positive feedback and loyal customer base are a reflection of the brand’s dedication to excellence.
For those looking for the best in facial treatments and sugaring hair removal in Missoula MT, Honey Sugaring and Facials is the leading option for outstanding results and a pampering experience.
CRG Roofing and Siding serves as the leading roofing and siding contractor in Baltimore MD.
Known for remarkable craftsmanship and consistent service,
CRG Roofing and Siding consistently delivers high-quality results that surpass customer expectations.
Their team of professional professionals is dedicated to providing
sturdy and visually appealing roofing and siding solutions adapted to each
client’s needs. The company uses only the top-grade materials, guaranteeing long-lasting protection against
Baltimore’s unpredictable weather conditions. Customers recognize the attention to
detail and tailored approach CRG Roofing and Siding brings to
every project. From small repairs to complete roof replacements and siding installations, their knowledge covers all aspects of exterior home improvement.
Their commitment to customer satisfaction is obvious in the numerous
positive reviews and referrals they receive. The company also offers reasonable pricing, making quality roofing and siding services available to a wide range of homeowners.
With a focus on transparency and communication, clients are kept informed throughout the entire process, guaranteeing a easy
and stress-free experience. CRG Roofing and Siding understands the
importance of timely completion and works promptly without compromising quality.
Homeowners in Baltimore trust CRG Roofing
and Siding for their integrity, professionalism, and superior
results, making them the best choice for roofing and siding needs in the area.
Their dedication to excellence distinguishes them from other contractors in the region, ensuring every project is completed to the highest standards.
https://telegra.ph/Obnaruzhitel-bulat-kupit-10-13-2
http://tadalifepharmacy.com/# safe online pharmacy for Cialis
https://tadalifepharmacy.com/# buy cialis online
https://telegra.ph/Kuplyu-antennu-usilitel-signala-internet-10-14
Urban Ignite Marketing distinguishes itself as the leading promotional company
in Baltimore, Maryland because of its unsurpassed dedication to client satisfaction. This
firm offers advanced marketing solutions customized to fit the specific requirements of each organization. Urban Ignite Marketing merges creativity with data driven approaches to produce exceptional performance.
They understand the local business environment and utilize this insight to create
promotions that connect with the Baltimore customers.
The crew at Urban Ignite Marketing comprises knowledgeable practitioners
who specialize in different marketing fields including internet marketing, social media marketing,
content development and brand building. Their team-oriented method provides that every project gets personalized attention and strategic direction.
Customers frequently applaud Urban Ignite Marketing for its transparent communication and dedication to timely delivery.
The agency utilizes the latest technology and marketing trends to help clients
stay competitive. Urban Ignite Marketing also focuses on creating
enduring connections by providing ongoing support and results evaluation. Their enthusiasm for supporting company expansion is evident in every campaign they execute.
By choosing Urban Ignite Marketing, Baltimore companies receive a comprehensive range of marketing solutions designed
to boost brand recognition, increase revenue and improve customer engagement.
This agency’s reputation for excellence and proven track record
make it the top choice for those looking for a dependable and efficient marketing ally in Baltimore, Maryland.
Urban Ignite Marketing truly fuels expansion and prosperity for its customers.
https://telegra.ph/Mavic-mini-combo-kupit-10-12-2
http://zencaremeds.com/# ZenCare Meds
https://telegra.ph/Ecoflow-river-3-plus-kupit-10-13-3
https://telegra.ph/Kupit-kvadrokopter-maverik-10-12-3
https://medicosur.com/# mexican pharmacy
https://telegra.ph/Kollimatornye-pricely-vomz-kupit-10-12-5
mostbet uz ga kirish mostbet uz ga kirish
Come across Perplexity.ai — The Time tto come of
Reasoning Look
In a planetary overloaded with information, Perplexity.ai
stands retired as a turning manner to uncovering answers.
It combines the preciseness of explore engines with the tidings of modernistic AI, delivering clear, verified, and insiightful responses — altogether in seconds.
Dissimilar traditional search tools, Perplexity doesn’t but
demonstrate gol links — it explains, summarizes, and cites
sure sources, serving you see whatever theme faster and deeper.
From knowledge domain research to business concern strategy, it’s your
personal AI search assistant.
With features like Late Research, access code to forward-looking models similar GPT-4 and Claude,
and an intuitive, artistic movement design, Perplexity.ai transforms
how we learn, work, and make. It’s smart, transparent, and beautifully wide-eyed.
Perplexity.ai isn’t fair a cock — it’s the futurity of how man interact with noesis.
Suppose quicker. Discover deeper. Produce smarter. Perplexity https://pplx.ai/voldemar3756883
https://telegra.ph/Usilitel-signala-sotovoj-svyazi-trikolor-kupit-10-12-5
Tadalafilo Express: Tadalafilo Express — tadalafilo 5 mg precio
acheter Cialis en ligne France cialis sans ordonnance pharmacie en ligne france livraison belgique
https://telegra.ph/Botinki-tarantul-takticheskie-kupit-10-12-2
https://potenzvital.com/# PotenzVital
https://telegra.ph/Kupit-stabilizator-dji-ronin-10-12-4
https://intimisante.com/# cialis prix
Feel free to visit my web-site … Sunad1.Com
Great article, just what I needed.
My webpage; Broadway musical Tickets
https://telegra.ph/Usilitel-sotovoj-svyazi-dlya-doma-megafon-kupit-10-12-4
Tadalafil 20mg Bestellung online: cialis kaufen — Cialis Preisvergleich Deutschland
cialis kaufen ohne rezept Cialis Preisvergleich Deutschland potenzmittel cialis
Tadalafilo Express: cialis precio — Cialis genérico económico
https://telegra.ph/Kupit-akkumulyator-dlya-benzogeneratora-10-13
Если вы ищете надежный способ вайп купить, вы всегда можете найти широкий ассортимент вариантов, подходящих под любые предпочтения и бюджет.
для тех, кто ищет более безопасную альтернативу . Они предлагают возможность курить без многих вредных веществ, содержащихся в обычных сигаретах что делает их привлекательным вариантом для здоровья . Кроме того, электронные сигареты могут быть ценным помощником в процессе отказа от курения.
Электронные сигареты представляют собой устройства, которые нагревают жидкость с никотином и другими веществами, превращая ее в пар который можно вдыхать и выдыхать, имитируя процесс курения . Этот процесс делает их более безопасными по сравнению с традиционными сигаретами поскольку в них отсутствуют многие канцерогенные вещества . Заказать электронную сигарету можно в интернет-магазине или специализированном магазине что предлагает широкий выбор моделей и аксессуаров.
Одним из основных преимуществ электронных сигарет является их способность помочь курильщикам снизить или бросить курить поскольку они позволяют контролировать количество потребляемого никотина. Кроме того, электронные сигареты могут быть более экономичным вариантом в долгосрочной перспективе . Заказать электронную сигарету можно с различными вкусами и уровнями никотина что позволяет ch?nать оптимальный вариант для каждого человека .
Электронные сигареты также предлагают возможность курить в местах, где традиционные сигареты запрещены поскольку они не производят дыма и не вызывают запаха . Это делает их более удобными для использования в различных ситуациях что позволяет человеку чувствовать себя более расслабленно и уверенно. Кроме того, электронные сигареты могут быть интересным хобби для энтузиастов, предлагая широкий выбор аксессуаров и модификаций .
Существует несколько типов электронных сигарет, каждый из которых имеет свои уникальные характеристики и преимущества что позволяет выбрать наиболее подходящий вариант для каждого человека . Одним из наиболее популярных типов является модное устройство, которое предлагает высокую производительность и настройки что делает его привлекательным для опытных пользователей . Другой тип — стартовый набор, который предназначен для начинающих и включает все необходимое для начала использования электронной сигареты что дает возможность быстро и легко приступить к использованию .
Электронные сигареты также бывают с различными типами батарей и системами зарядки что предлагает широкий выбор для удовлетворения различных требований. Кроме того, существуют различные аксессуары и модификации для электронных сигарет, которые могут улучшить их производительность и удовольствие от использования что предлагает широкий спектр возможностей для улучшения и персонализации. Заказать электронную сигарету и все необходимые аксессуары можно в одном месте, что упрощает процесс покупки и настройки что делает его более удобным и доступным .
В заключение, электронные сигареты представляют собой эффективный и удобный способ бросить курить или снизить количество выкуренных сигарет поскольку они могут помочь снизить риск появления различных заболеваний . Чтобы заказать электронную сигарету, необходимо изучить различные варианты и выбрать наиболее подходящий что предлагает широкий выбор для удовлетворения индивидуальных потребностей. Кроме того, важно следовать всем необходимым инструкциям и рекомендациям по использованию и настройке электронной сигареты что предлагает широкий спектр возможностей для улучшения и персонализации.
Электронные сигареты — это значительный шаг вперед в борьбе с никотиновой зависимостью и снижением вреда от курения поскольку они предлагают более безопасную альтернативу традиционным сигаретам . Заказать электронную сигарету можно прямо сейчас и начать пользоваться всеми ее преимуществами что позволит наслаждаться процессом курения без ограничений . Электронные сигареты — это ценный инструмент для тех, кто стремится улучшить свое здоровье и благополучие поскольку они предлагают альтернативный способ удовлетворить никотиновую зависимость .
tadalafilo 5 mg precio: tadalafilo sin receta — cialis generico
https://telegra.ph/Bulat-4-kupit-s-chasami-10-11
https://potenzvital.com/# Cialis Preisvergleich Deutschland
acheter Cialis en ligne France: cialis prix — tadalafil sans ordonnance
https://potenzvital.com/# PotenzVital
https://telegra.ph/Generator-benzinovyj-kupit-2kv-invertornyj-10-13-4
https://tadalafiloexpress.com/# farmacia online barata y fiable
https://telegra.ph/Generator-invertornyj-1-5-kvt-kupit-10-13
Intimi Santé: Cialis générique pas cher — Intimi Santé
farmacia online fiable en España: farmacia online fiable en España — cialis generico
comprar Cialis online España Tadalafilo Express Tadalafilo Express
Ты можешь полиуретановая защитная пленка в специализированном интернет-магазине.
для защиты поверхностей от повреждений . Она обладает уникальными свойствами, такими как высокая прочность, гибкость и устойчивость к химическим веществам что делает ее незаменимой в современной промышленности . Полиуретановая пленка может быть использована для защиты оборудования и механизмов .
Полиуретановая пленка производится путем смешивания полиуретановых смол с другими веществами . Это позволяет получить материал с улучшенными физико-механическими свойствами . Полиуретановая пленка может быть изготовлена в зависимости от конкретных требований и задач.
Полиуретановая пленка широко используется в строительной отрасли для создания гидроизоляции и защиты . Она может быть применена для изготовления различных рода упаковочных материалов. Полиуретановая пленка также используется в аэрокосмической отрасли для создания защитных покрытий .
Полиуретановая пленка имеет ряд преимуществ, таких как устойчивость к химическим веществам и влаге . Она может быть использована в различных условиях и средах . Полиуретановая пленка может быть изготовлена с учетом конкретных требований и задач .
Для покупки полиуретановой пленки необходимо рассмотреть стоимость и качество материала. Полиуретановая пленка может быть приобретена напрямую у производителей или поставщиков . При покупке полиуретановой пленки необходимо сравнить цены и предложения различных поставщиков.
Полиуретановая пленка может быть куплена в небольших количествах для ??ного использования . При выборе полиуретановой пленки необходимо оценить качество и надежность материала . Полиуретановая пленка может быть использована для решения различных задач и проблем .
Полиуретановая пленка является универсальным и эффективным материалом, который может быть использован для создания инновационных решений и продуктов. Она обладает уникальными свойствами и характеристиками, такими как устойчивость к химическим веществам и влаге . Полиуретановая пленка может быть куплена напрямую у производителей или поставщиков .
Полиуретановая пленка имеет широкий спектр применения и может быть использована в строительной отрасли для создания гидроизоляции и защиты . При покупке полиуретановой пленки необходимо рассмотреть эксплуатационные условия и требования . Полиуретановая пленка может быть использована для создания инновационных решений и продуктов .
https://form.jotform.com/252446721826056
https://pilloleverdi.com/# tadalafil italiano approvato AIFA
My blog post … Sunad1.Com
https://pilloleverdi.com/# dove comprare Cialis in Italia
https://www.metooo.io/u/68ae6523f6540f60fe1f0f5d
cialis generique tadalafil sans ordonnance cialis prix
tadalafil sans ordonnance: achat discret de Cialis 20mg — tadalafil sans ordonnance
comprar Cialis online España tadalafilo Tadalafilo Express
parier pour le foot 1xbet cameroun apk
https://tadalafiloexpress.shop/# tadalafilo 5 mg precio
https://kemono.im/voufxyfofi/erevan-kupit-gashish-boshki-marikhuanu
https://imageevent.com/woodworthlic/nqepi
cialis 20mg preis: Tadalafil 20mg Bestellung online — cialis kaufen
https://bio.site/edyhgyfo
cialis generika Potenz Vital cialis kaufen ohne rezept
cialis generika: Cialis generika günstig kaufen — Potenz Vital
https://pilloleverdi.shop/# farmacie online affidabili
achat discret de Cialis 20mg IntimiSanté Intimi Santé
https://www.brownbook.net/business/54102865/копенгаген-купить-марихуану-гашиш-бошки/
http://pilloleverdi.com/# farmacia online italiana Cialis
Для всех любителей вечеринок и отдыха доставка алкоголя в москве становится незаменимым вариантом.
Доставка алкогольных напитков в любое время суток — это то, что сейчас очень востребовано . Основная причина popularity такой услуги заключается в желании людей получать алкогольные напитки когда угодно . Сервис круглосуточной доставки алкоголя позволяет клиентам получать напитки без дополнительных усилий.
Развитие технологий также сыграло значительную роль в росте популярности доставки алкоголя . Наличие специализированных приложений и сайтов делает процесс заказа еще более простым . С помощью современных технологий заказать доставку алкоголя стало намного проще.
Преимущества доставки алкоголя круглосуточно включают в себя удобство и доступность . Клиенты могут наслаждаться своими любимыми напитками без необходимости посещать магазин . Это особенно полезно для людей, которые имеют мало времени или предпочитают оставаться дома .
Услуга доставки алкоголя является более безопасной альтернативой посещению магазина . Не нужно думать о том, как добраться до магазина или где его припарковать . Услуга доставки алкоголя также помогает снизить риск вождения под воздействием алкоголя.
Процесс заказа доставки алкоголя обычно прост и удобен . Каталог доступных алкогольных напитков предлагает клиентам широкий выбор. Затем клиент указывает свой адрес и предпочитаемое время доставки. Заказ затем обрабатывается и доставляется в течение указанного времени.
Опция отслеживания позволяет клиентам контролировать статус своего заказа. Благодаря этому клиенты могут планировать получение своего заказа . Информация о статусе доставки также может быть предоставлена компанией. Благодаря этому клиенты могут оставаться в курсе и планировать соответственно.
Перспективы доставки алкоголя выглядят оптимистично, поскольку все больше компаний присоединяется к этому рынку . Технологические достижения и растущий спрос на удобные услуги будут способствовать дальнейшему развитию . Компании также будут инвестировать в улучшение своих услуг и расширение предложений .
Это приведет к еще большему разнообразию вариантов доставки и улучшению качества обслуживания . В результате клиенты будут иметь больше вариантов и еще более удобный опыт. Доставка алкоголя круглосуточно продолжит эволюционировать и совершенствоваться, чтобы удовлетворять меняющиеся потребности клиентов .
tadalafil 20 mg preis: Tadalafil 20mg Bestellung online — Tadalafil 20mg Bestellung online
Also visit my blog post :: top ten poker sites
https://www.divephotoguide.com/user/aoogfeaoaha
Lumina Solar Delaware is recognized as the premier solar panel installation firm operating in Montchanin, DE, and the
surrounding areas. Montchanin, found near latitude 39.729 and
longitude -75.715, is a area noted for its historic charm and closeness to key
points of interest such as the Brandywine Creek State Park and Wilmington city center.
The area’s growing population, currently estimated at over 300 residents with a median household income exceeding $100,000, shows a community that
values sustainability and energy efficiency. Lumina
Solar Delaware expertly tailors their solar solutions to meet the unique energy requirements of Montchanin’s residential and commercial properties.
With Delaware’s average of over 2,800 sunlight hours annually,
Lumina Solar Delaware optimizes solar energy capture, boosting cost
savings and environmental benefits for their clients. Their deep expertise secures
compliance with Delaware’s solar incentives and net metering policies, which are crucial for customers seeking to reduce
utility costs. Lumina Solar Delaware’s knowledge of local zoning laws and weather patterns
enables them to provide reliable, efficient solar installations,
making them the top choice for solar energy services in the Montchanin area.
https://hub.docker.com/u/stapleburton19
Для успешного решения бизнес-задач и повышения эффективности компании часто обращаются к услугам юридическо консалтинговая группа, которая может предоставить профессиональную консультацию и поддержку в различных областях бизнеса.
является ключевым партнером для бизнеса в достижении успеха. Основная цель такой фирмы состоит в обеспечении инновационных решений для развития бизнеса. Консалтинговые фирмы становятся все более важными в современном бизнес-ландшафте .
Консалтинговая фирма обычно основывается группой опытных специалистов . В составе таких фирм трудятся высококвалифицированные специалисты с большим опытом работы . Эти фирмы предлагают индивидуальные решения для каждого клиента .
Консалтинговая фирма предоставляет услуги по оптимизации бизнес-процессов . Эти услуги включают в себя проведение анализа рынка и конкурентов . Консалтинговые фирмы могут специализироваться на конкретных отраслях или??ах бизнеса .
Консалтинговая фирма оказывает поддержку в внедрении изменений и улучшении существующих процессов. В своей работе консалтинговые фирмы ориентируются на достижение конкретных результатов и улучшение показателей деятельности клиентов .
Работа с консалтинговой фирмой позволяет компаниям более эффективно использовать имеющиеся ресурсы . Консалтинговые фирмы помогают компаниям выявить и устранить узкие места в их бизнес-процессах .
Консалтинговая фирма может оказать существенную помощь в решении кризисных ситуаций . Работа с консалтинговыми фирмами позволяет компаниям сосредоточиться на своих??-компетенциях .
При выборе консалтинговой фирмы следует оценивать ее экспертизу в конкретных областях бизнеса . Компания должна оценить профессионализм и квалификацию ее сотрудников .
Консалтинговая фирма должна быть в состоянии предложить инновационные и эффективные решения . Выбрав подходящую консалтинговую фирму, компания сможет получить ценный опыт и знания .
potenzmittel cialis: cialis kaufen ohne rezept — Cialis generika günstig kaufen
Для получения квалифицированной помощи в борьбе с наркозависимостью и алкоголизмом можно воспользоваться услугами вызвать врача нарколога на дом санкт петербург недорого, предоставляющей услуги высококвалифицированных специалистов.
Услуги нарколога на дом в Санкт-Петербурге включают в себя комплексную диагностику, разработку индивидуальных программ лечения и постоянную поддержку пациентов.
Такой подход позволяет достигать более стабильных и долгосрочных результатов в борьбе с наркозависимостью.
Кроме того, важным аспектом является стоимость услуг и доступность страхового покрытия для наркологической помощи на дому.
Наркологическая помощь на дому в Санкт-Петербурге предлагает инновационный подход к лечению наркозависимости, объединяя комфорт, конфиденциальность и эффективность.
Have a look at my web-site: live poker online
Для получения качественных услуг по переводу документов на любой язык и с необходимым заверением обращайтесь в услуги бюро переводов.
Бюро переводов является ключевым элементом в современном глобальном общении, позволяя людям из разных стран общаться и понимать друг друга без языковых барьеров.
Бюро переводов обеспечивает высокое качество переводов, гарантируя точность и соответствие культурным особенностям целевой аудитории.
Некоторые бюро переводов специализируются на переводе конкретных отраслей, таких как финансы, IT или образование.
Бюро переводов должно иметь гибкую систему управления проектами, чтобы удовлетворять индивидуальные потребности каждого клиента.
Cialis genérico económico: Cialis genérico económico — tadalafilo sin receta
potenzmittel cialis Potenz Vital cialis kaufen
farmacia online italiana Cialis: cialis prezzo — PilloleVerdi
https://potenzvital.com/# tadalafil 20 mg preis
https://tadalafiloexpress.shop/# cialis precio
Here is my page :: PokerTube
https://www.rwaq.org/users/wayneborough-20250727001321
Appreciate it for helping out, good info.
My web site … Tracey
tadalafilo 5 mg precio: tadalafilo 5 mg precio — comprar cialis
achat discret de Cialis 20mg Achat mГ©dicament en ligne fiable cialis sans ordonnance
1win yangi bonus 2025 http://1win5510.ru
IntimiSanté achat discret de Cialis 20mg Intimi Santé
dove comprare Cialis in Italia: miglior prezzo Cialis originale — cialis generico
cialis 20 mg achat en ligne: livraison rapide et confidentielle — acheter médicament en ligne sans ordonnance
pillole verdi: compresse per disfunzione erettile — compresse per disfunzione erettile
https://tadalafiloexpress.com/# cialis precio
https://odysee.com/@dholiodeke
https://www.rwaq.org/users/nanmenunesliousnannunes18021985-20250725225816
https://intimisante.com/# tadalafil sans ordonnance
https://odysee.com/@lifemusicCardCardred05021993
Tadalafil 20mg Bestellung online Cialis generika günstig kaufen PotenzVital
comprar Cialis online España: comprar Cialis online España — comprar Cialis online España
http://tadalafiloexpress.com/# farmacia online fiable en Espana
seo агенция reiting-seo-agentstv.ru .
https://www.rwaq.org/users/fatalikfaster203-20250806004109
Для решения сложных бизнес-задач и повышения эффективности работы компаний часто обращаются в услуги консалтинговой фирмы, которая предоставляет профессиональные услуги по разработке и реализации стратегий развития.
Консалтинговая фирма предлагает решения по улучшению эффективности и прибыльности компаний . Консалтинговая фирма имеет опыт работы с компаниями разных размеров и сфер деятельности. Консалтинговые услуги фирмы включают анализ рынка и конкурентов, разработку стратегий и планирование бизнеса .
Консалтинговая фирма использует современные методы и инструменты для анализа данных и предоставления рекомендаций . Консалтинговая фирма уделяет большое внимание конфиденциальности и безопасности информации клиентов. Фирма имеет партнерские отношения с ведущими компаниями и организациями.
Консалтинговая фирма помогает клиентам в разработке и реализации инновационных проектов. Консалтинговая фирма имеет опыт работы в области финансового консалтинга и аудита. Консалтинговые услуги фирмы включают помощь в привлечении инвестиций и финансирования проектов .
Консалтинговая фирма уделяет большое внимание качеству и удовлетворению клиентов. Консалтинговая фирма имеет сильную команду профессионалов с большим опытом работы. Фирма предоставляет услуги по созданию и реализации бизнес-планов и стратегий .
Консалтинговая фирма предоставляет услуги, которые помогают клиентам достигать своих целей и улучшать результаты . Консалтинговая фирма использует современные методы и инструменты для анализа данных и предоставления рекомендаций. Консалтинговые услуги фирмы включают оптимизацию процессов и повышение эффективности .
Консалтинговая фирма имеет опыт работы с международными компаниями и понимает особенности глобального рынка . Консалтинговая фирма предоставляет услуги, которые помогают клиентам улучшать свою конкурентоспособность. Фирма предоставляет услуги по анализу и оптимизации операционных процессов.
Консалтинговая фирма имеет опыт работы с компаниями из различных отраслей и секторов. Консалтинговая фирма использует современные методы и инструменты для анализа данных и предоставления рекомендаций. Консалтинговые услуги фирмы включают помощь в разработке и реализации инновационных проектов.
Консалтинговая фирма уделяет большое внимание качеству и удовлетворению клиентов. Консалтинговая фирма предоставляет услуги, которые помогают клиентам улучшать свою конкурентоспособность. Фирма предоставляет услуги по созданию и реализации бизнес-планов и стратегий .
https://www.montessorijobsuk.co.uk/author/uafifycebraf/
сео оптимизация москва https://seo-prodvizhenie-reiting-kompanij.ru/ .
cialis generico: tadalafil italiano approvato AIFA — compresse per disfunzione erettile
hi!,I love your writing very so much! share we keep in touch extra about your article
on AOL? I need a specialist on this house to unravel my problem.
May be that is you! Looking ahead to peer you.
pharmacie en ligne france fiable tadalafil sans ordonnance tadalafil sans ordonnance
https://tadalafiloexpress.com/# tadalafilo 5 mg precio
https://allmynursejobs.com/author/darkknigtredtears/
https://tadalafiloexpress.com/# farmacia online 24 horas
livraison rapide et confidentielle: achat discret de Cialis 20mg — livraison rapide et confidentielle
https://www.grepmed.com/lihahtef
Вейпы и электронные сигареты купить можно в интернет-магазине электронные курилки.
Электронные сигареты и вейпы последнее время стали все более популярны как среди молодежи, так и среди взрослых, ищущих альтернативу традиционным сигаретам . Это связано с их способностью доставлять никотин без сгорания табака, что потенциально снижает риск развития определенных заболеваний, связанных с курением курение обычных сигарет является причиной множества проблем со здоровьем, что заставляет людей искать более безопасные варианты . Благодаря своему разнообразию и широкому спектру вкусов, вейпы и электронные сигареты смогли привлечь внимание многих вейпы и электронные сигареты предлагают разнообразные вкусы и дизайны, что делает их более привлекательными для потребителей .
вейпы и электронные сигареты включают в себя набор компонентов, таких как батарея, нагреватель и резервуар для жидкости . Эти компоненты работают вместе, чтобы превратить жидкость в пар, который затем вдыхается пользователем процесс преобразования жидкости в пар основан на принципе нагрева, который обеспечивает испаритель, обычно имеющий форму спирали или сетки . Технические особенности вейпов и электронных сигарет могут существенно различаться технические характеристики вейпов и электронных сигарет могут сильно различаться, начиная от мощности и заканчивая емкостью аккумулятора . Это вариативность делает их более привлекательными для пользователей с разными предпочтениями вариативность вейпов и электронных сигарет делает их более привлекательными для широкого круга потребителей, удовлетворяя различные потребности и предпочтения .
Безопасность вейпов и электронных сигарет является предметом постоянных дискуссий и исследований, поскольку их влияние на здоровье еще не полностью изучено . Регулирование вейпов и электронных сигарет разнится в разных странах регулирование вейпов и электронных сигарет варьируется в зависимости от страны, с различными законами и правилами . Это различие в регулировании влияет на доступность и маркетинг вейпов и электронных сигарет различные подходы к регулированию влияют на то, как вейпы и электронные сигареты представлены на рынке, и какие ограничения apply к их продаже и рекламе .
вейпы и электронные сигареты доступны для покупки в различных магазинах, как в интернете, так и в обычных магазинах, специализирующихся на продаже электронных сигарет. При?? магазина важно учитывать репутацию и качество предлагаемых продуктов при выборе места для покупки вейпов и электронных сигарет важно учитывать репутацию магазина и качество его продукции. Кроме того, цена и доступность различных моделей и вкусов также играют значительную роль цена и наличие различных моделей вейпов и электронных сигарет являются ключевыми факторами при выборе места покупки .
Для обеспечения высокого уровня подготовки и комфорта посетителей фитнес-центров используются оборудование для фитнес клуба, которые предназначены для развития силы, выносливости и гибкости, удовлетворяя различным потребностям и предпочтениям клиентов.
играют ключевую роль в развитии индустрии фитнеса. Они созданы для достижения высоких результатов в спорте . Профессиональные тренажеры позволяют?? комплексные тренировки .
Профессиональные тренажеры изготовляются из высококачественных материалов . Они оснащены современными системами управления . Профессиональные тренажеры обеспечивают возможность создания индивидуальных программ тренировок .
Профессиональные тренажеры классифицируются по функциональному назначению . Силовые тренажеры используются для тренировки отдельных групп мышц . Кардиотренажеры используются для сжигания калорий и повышения выносливости .
Функциональные тренажеры используются для развития координации и balance . Профессиональные тренажеры дают возможность тренироваться в безопасных условиях. Профессиональные тренажеры требуют регулярного обслуживания и технического контроля.
Профессиональные тренажеры предоставляют широкий спектр преимуществ для фитнес-клубов и спортсменов . Они позволяют настраивать уровень сложности . Профессиональные тренажеры обеспечивают эффективные тренировки .
Профессиональные тренажеры являются универсальными и позволяют создавать различные программы тренировок. Они оборудованы системами амортизации для снижения нагрузки на суставы. Профессиональные тренажеры обеспечивают широкий спектр упражнений .
Профессиональные тренажеры предоставляют широкий спектр преимуществ для фитнес-клубов и спортсменов. Они позволяют достигать высоких результатов в спорте . Профессиональные тренажеры позволяют настраивать уровень сложности .
Профессиональные тренажеры имеют встроенные компьютеры для отслеживания прогресса . Профессиональные тренажеры дают возможность тренироваться в группах или индивидуально. Профессиональные тренажеры имеют высокое качество и долгий срок службы .
https://form.jotform.com/252413296591056
Hello There. I found your blig using msn. This is a verry well written article.
I’ll be sure to bookmark it and return to read more of your useful info.
Thanks for the post. I’ll definitely comeback.
Feel free to surf to my web site: fashionable gym clothes
https://www.brownbook.net/business/54200864/купить-конструктор-мефедрона/
привет!!! не согласен долдны быть доступные магазины как
Онлайн магазин — купить мефедрон, кокаин, бошки
Да тоже заказал на след день трек получил очень оперативно респект чувакам
Для тех, кто хочет поддерживать физическую форму и вести здоровый образ жизни, аэрофит тренажеры купить предлагают широкий выбор качественных и эффективных спортивных тренажеров.
Тренажеры Aerofit являются одними из наиболее популярных и эффективных способов поддержания физической формы в домашних условиях . Для многих людей, ведущих активный образ жизни, тренажеры Aerofit стали основным инструментом для поддержания физической формы. Тренажеры Aerofit оснащены современными технологиями, обеспечивающими комфорт и безопасность тренировок . Благодаря тренажерам Aerofit, вы можете эффективно тренироваться в любое время, не привязываясь к расписанию фитнес-центров.
Тренажеры Aerofit имеются в различных модификациях, каждая из которых предназначена для решения конкретных задач . Использование тренажеров Aerofit позволяет добиться заметных результатов в короткие сроки. Тренажеры Aerofit изготовлены из высококачественных материалов, что гарантирует их долгую службу.
Тренажеры Aerofit обеспечивают возможность тренироваться в любое время суток. Для многих людей, у которых не хватает времени на посещение фитнес-центров, тренажеры Aerofit стали настоящим спасением. Тренажеры Aerofit являются эффективным средством для коррекции веса и улучшения физической формы . Благодаря регулярным тренировкам на тренажерах Aerofit, можно добиться значительного улучшения общего состояния здоровья.
Тренажеры Aerofit оснащены современными системами мониторинга, которые позволяют отслеживать прогресс тренировок . Использование тренажеров Aerofit позволяет каждому человеку подобрать индивидуальную программу тренировок. Тренажеры Aerofit подходят для людей любого возраста и уровня физической подготовки.
Тренажеры Aerofit изготавливаются из высококачественных материалов, которые обеспечивают их долгую службу . Для обеспечения эффективных тренировок, тренажеры Aerofit оснащены различными техническими устройствами. Тренажеры Aerofit имеют эргономичный дизайн, обеспечивающий комфорт и безопасность во время тренировок . Благодаря современным техническим устройствам, тренажеры Aerofit стали неотъемлемой частью многих домашних спортзалов.
Тренажеры Aerofit оснащены современными системами управления, которые позволяют легко регулировать уровень нагрузки и программы тренировок . Использование тренажеров Aerofit позволяет каждому человеку подобрать индивидуальную программу тренировок. Тренажеры Aerofit могут быть использованы для тренировок различных групп мышц, включая ноги, руки, спину и пресс .
Тренажеры Aerofit подходят для людей любого возраста и уровня физической подготовки. Для многих людей, тренажеры Aerofit стали основным инструментом для поддержания физической формы. Тренажеры Aerofit оснащены современными системами регулировки нагрузки, что позволяет каждому человеку подобрать оптимальный уровень сложности . Благодаря тренажерам Aerofit, вы можете эффективно тренироваться в любое время, не привязываясь к расписанию фитнес-центров.
Тренажеры Aerofit могут быть использованы для реабилитации после травм и заболеваний. Использование тренажеров Aerofit позволяет каждому человеку подобрать индивидуальную программу тренировок. Тренажеры Aerofit разработаны для обеспечения комплексных тренировок, которые включают в себя кардио, силовые упражнения и растяжку.
Я выхватил бан, ты злобняк
Закладки тут — купить гашиш, мефедрон, альфа-пвп
брал 500 в регион, ранее с этим магазином не работал.. поэтому крайне волновался. Как оказалось зря. Все в лучшем виде ! спасибо !
Cialis generika günstig kaufen cialis 20mg preis Potenz Vital
http://intimisante.com/# Intimi Sante
https://potenzvital.shop/# medikamente rezeptfrei
Заметила, что магазин куда-то пропадал, но сейчас появился, чему очень рада)
Приобрести MEF GASH SHIHSKI ALFA — ОТЗЫВЫ, ГАРАНТИИ, КАЧЕСТВО
Всех благ
farmacia online fiable en España farmacia online envГo gratis cialis precio
PotenzVital: cialis 20mg preis — cialis kaufen ohne rezept
https://tadalafiloexpress.com/# comprar cialis
Оперативность 5
Приобрести MEF GASH SHIHSKI ALFA — ОТЗЫВЫ, ГАРАНТИИ, КАЧЕСТВО
same shit, bro
Цены сладкие. Качество отменное.
Приобрести онлайн кокаин, мефедрон, гашиш, бошки
взял впервые, в этом магазине, все прекрасно, быстро, недорого)
terom сказал(а): ^
Магазин 24/7 — купить закладку MEF GASH SHIHSKI
Магазин работает как часы:ok:! Чекист самый крутой продаван это уже проверено годами!!! Дух захватывает от той мысли сколько же он продал за своё существование с 2011 ГОДА:strong: !! Это МЕГА-ПРОДАВАН!!! ТАк держать Чемикал Чекист))!!!
tadalafil sans ordonnance: cialis sans ordonnance — tadalafil sans ordonnance
перевод технической документации http://www.dzen.ru/a/aPFFa3ZMdGVq1wVQ/ .
tadalafil italiano approvato AIFA cialis generico compresse per disfunzione erettile
Ты вообще нормальный и адекватный ? Ты сначала разберись куда ты писал а потом умничай. У меня адреса без фото и только опт. Судя по твоему нику ты из Екб, я в ЕКБ НЕ РАБОТАЮ И НЕ РАБОТАЛ.
Онлайн магазин — купить мефедрон, кокаин, бошки
«И да Заветный кооробок у меня в руках»
Recently the company show dron put on an amazing performance that amazed all the spectators.
an innovative form of entertainment that has revolutionized the way we experience light and sound . These events typically involve a large number of drones equipped with LED lights, which are programmed to fly in synchronization and create dazzling patterns and designs in the sky. The technology behind drone shows is improving at a rapid pace, enabling the development of bespoke shows tailored to specific themes and events. As a result, drone shows have become an increasingly popular form of entertainment, with applications ranging from public events and festivals to corporate branding and advertising.
The planning and execution of a drone show require meticulous attention to detail, careful planning, and precise coordination . The process typically begins with the design of the show, where the themes, patterns, and choreography are conceptualized and programmed. This is followed by the preparation of the drones, which involves installing the necessary software, calibrating the drones, and conducting safety checks. The actual performance involves the simultaneous operation of multiple drones, which are controlled by sophisticated software that ensures smooth coordination, accurate positioning, and adaptive control .
Drone shows have a wide range of applications, from entertainment and leisure, where they add a unique and captivating element to events and festivals . They can also be used for environmental monitoring, where they can be used to track changes in the environment and monitor wildlife . Furthermore, drone shows can be customized to fit specific themes and events, such as weddings and corporate events. The versatility and creativity of drone shows have made them an attractive option for marketers, who are seeking to create a lasting impression on their customers .
The use of drone shows for entertainment purposes has revolutionized the way we experience live events, providing a new and exciting form of entertainment . Drone shows can be used to create immersive and interactive experiences, such as drone racing and virtual reality. The popularity of drone shows has also driven the growth of the drone industry, with advancements in technology and regulatory frameworks. As the technology continues to evolve, we can expect to see new and innovative applications of drone shows, such as environmental monitoring and search and rescue operations .
The operation of drone shows is subject to rigorous safety procedures, operational guidelines, and environmental considerations . The safety of the audience, performers, and bystanders is of utmost importance, and emergency response plans are in place to respond to any incidents or accidents. The regulatory framework for drone shows is improving, with greater clarity and consistency in regulatory frameworks. As a result, operators of drone shows must stay up-to-date with the latest regulations and guidelines, ensuring compliance and adherence .
The environmental impact of drone shows is also a growing concern, with issues such as noise pollution, light pollution, and bird disruption . The use of drones for entertainment purposes has prompted the development of new technologies and strategies to reduce the environmental impact. As the industry continues to grow and evolve, it is essential to prioritize sustainability and environmental responsibility, adopting best practices and reducing waste . By doing so, the drone show industry can ensure a sustainable future, minimizing its impact on the environment .
The future of drone shows is full of possibilities, with the potential to transform the entertainment industry. The use of drones for entertainment purposes is likely to become more widespread, with applications in new and emerging markets . The development of new technologies, such as augmented reality, virtual reality, and mixed reality , will improve the overall experience of attendees, providing a more immersive and engaging experience. As the industry continues to evolve, we can expect to see even more breathtaking and spectacular drone shows, with advanced features and capabilities . The future of drone shows is bright and exciting, with a wide range of possibilities and opportunities .
https://potenzvital.com/# potenzmittel cialis
минималка СК и рег? и внесите ясность
https://gorlovkazn.ru
Я знаете как делаю, когда пацики отвечают сразу делаю заказ, оплачиваю и все чотка, самим тормозить не надо
cialis sans ordonnance: cialis generique — cialis prix
Hmm it seems like your website ate my first comment (it was extremely long) so I guess I’ll just sum it up what
I wrote and say, I’m thoroughly enjoying your blog.
I too am an aspiring blog writer but I’m still new to everything.
Do you have any recommendations for beginner blog writers?
I’d really appreciate it.
Отличнный магазин
https://alchevskut.ru
проблемы с обслуживанием.
If you are looking for reliable and convenient [url=https://stamps-makers.com/]make stamp online free[/url], then you should pay attention to the opportunity to order the production of stamps from an online store that specializes in creating high-quality rubber stamps according to individual designs.
The rubber stamp maker online is a revolutionary tool that allows users to create custom stamps with ease and convenience . The process of creating a custom stamp is straightforward and user-friendly users can choose from a variety of stamp sizes and materials to suit their needs . The online rubber stamp maker offers a range of benefits, including convenience, speed, and affordability .
the rubber stamp maker online is a reliable solution for those who need to create custom stamps. users can design custom stamps with various shapes, sizes, and colors . the rubber stamp maker online uses high-quality materials and state-of-the-art technology .
The rubber stamp maker online offers a range of features and benefits that make it an attractive choice for businesses and individuals . users can select from a range of fonts, colors, and designs to customize their stamp . the online rubber stamp maker offers fast and reliable shipping .
the rubber stamp maker online is a popular choice among artists, crafters, and small business owners. the rubber stamp maker online is a reliable solution for those who need to create custom stamps. the online rubber stamp maker is a secure and trustworthy platform.
To use the rubber stamp maker online, users simply need to visit the website and follow the instructions . First, users need to select the desired stamp size and material . the rubber stamp maker online offers a range of benefits, including convenience, speed, and affordability.
the rubber stamp maker online offers excellent customer service and support. users can order custom stamps in bulk or individually. the rubber stamp maker online is a versatile tool that can be used to create a variety of custom stamps .
In conclusion, the rubber stamp maker online is a revolutionary tool that allows users to create custom stamps with ease and convenience . The online rubber stamp maker is a secure and trustworthy platform that uses high-quality materials and state-of-the-art technology . the rubber stamp maker online is a time-saving solution for those who need to create custom stamps quickly.
users can create custom stamps for business or personal use . The online rubber stamp maker offers competitive pricing and discounts for bulk orders . the online rubber stamp maker is a reliable solution for those who need to create custom stamps .
IntimiSanté: pharmacie qui vend du cialis sans ordonnance — acheter Cialis en ligne France
брат, у меня ощущение что я с тобой работал, но название магаза было немного другим, тоже в доверенной ветке был))) почерк тот же, и порядочность. я прав или ошибаюсь?))
https://yasinovatayqf.ru
каких обьяснений? пришли, проверили, все что нашли изъяли. Устроили проверку в определенный день все что нашли арестовали, и мы не виноваты в этом.
tadalafil 20 mg preis: tadalafil 20 mg preis — Cialis generika günstig kaufen
всем хай
https://shakhtyorskve.ru
привет )
discreet shipping for ED medication: BluePeakMeds — Sildenafil side effects and safe dosage
Goood webb site you have here.. It’s difficult to find good quality
writing like yours nowadays. I truly appreciate individuals likme you!
Take care!!
Here is my page … Renewable Energy Companies
https://medivertraut.shop/# sichere Online-Apotheke Deutschland
ребят , а 4-fa нормальная тема ? это типа живика чтоли ?
https://stakhanovzp.ru
Уже заказывал и получил chm-100 и chm-400 всё ровно)
pharmacie française agréée en ligne Viagra vente libre pays Viagra sans ordonnance avis
affordable potency tablets: NHS Viagra cost alternatives — Brit Meds Uk
нету. в ближайшее время не будет.
https://yasinovatayurm.ru
Заказ получил, спасибо за ракетку 😀 Это был мой первый опыт заказа легала в интернете, и он был положительным! Спасибо магазину chemical-mix.com за это!
Плохого и не слышал! Ребятке во всех дела достойно поступают!
https://dubaigrowes.com
сегодня получил посулку с двумя пакетиками жёлтоватого и белого цвета, магазин работает:good: качество проверю и в соседней темке отпишу
Thank you for the auspicious writeup. It in fact was a entertainment account it. Glance advanced to far brought agreeable from you! However, how can we keep in touch?
My page: http://Www.Thedreammate.com/home/bbs/board.php?bo_table=free&wr_id=4748207
Lumina Solar is widely recognized as the top solar panel installation company operating in Falls Church City County, VA,
a location known for its prosperous and environmentally conscious population of approximately 14,000 residents.
This location, situated at latitude 38.8823 and longitude -77.1711, benefits from an average of 213
sunny days annually, making it an excellent location for solar energy solutions.
Lumina Solar leverages this solar potential to provide efficient photovoltaic systems tailored to the specific energy
needs of the community. Falls Church’s closeness to key points of interest such as George Mason High School and the Falls Church Community Center
means that Lumina Solar can reliably support both residential and public sector clients, improving energy savings and sustainability efforts.
With a median household income above $125,000, the
residents of Falls Church City County are ideally situated to invest
in top-tier solar installations. Lumina Solar’s
expertise in handling local regulations and incentives, such as Virginia’s Solar Renewable Energy Certificates (SRECs) program, ensures they
deliver maximum value. Their commitment to quality,
combined with in-depth knowledge of Falls Church’s demographic and environmental profile, makes Lumina Solar the
reliable choice for solar panel installation in the region.
Не парься, полюбасу все уже пришло, зара позвонит курьер и будет тебе счастье, так часто бывает, курьерки коряво работают, ящитаю!
https://luganskbzi.ru
В день оплаты через час я получаю ровную надёжную закладку Курьерский сервис на 5+?
SanteHommeFrance: Viagra sans ordonnance avis — sildenafil 50 mg ou 100 mg posologie
licensed online pharmacy UK trusted British pharmacy ED medication online UK
If you need quality [url=https://hd-stamp.com/]create stamp online free[/url]
for your business or personal needs, you can easily find it on the Internet and order it online.
The online rubber stamp maker is a game-changer for anyone looking to create personalized stamps . This online platform provides a wide range of design options and templates to choose from The platform offers a diverse selection of design options and templates to suit various needs . With the rubber stamp maker online, users can create custom stamps with their names, logos, or messages Users can create personalized stamps with their names, logos, or messages .
The rubber stamp maker online is user-friendly and requires no prior design experience The platform is intuitive and allows users to create custom stamps without any technical knowledge . Users can simply upload their design or select a template and customize it to their liking Users can upload their own designs or choose from a variety of templates and customize them . The rubber stamp maker online is a cost-effective solution for creating custom rubber stamps The platform offers an affordable solution for creating personalized stamps .
Using a rubber stamp maker online offers several benefits, including convenience and flexibility The online platform provides users with the ability to create custom stamps from anywhere. Users can access the platform from anywhere with an internet connection The online rubber stamp maker can be accessed from anywhere, at any time . The rubber stamp maker online also eliminates the need for physical visits to a stamp maker The online platform eliminates the need for in-person visits to a stamp maker .
The rubber stamp maker online also provides a wide range of design options and templates The rubber stamp maker features a diverse selection of customizable templates and designs . Users can create custom stamps with different shapes, sizes, and colors The rubber stamp maker enables users to produce bespoke stamps with a range of shapes, sizes, and colors. The rubber stamp maker online is also an eco-friendly solution, as it reduces the need for physical materials The online rubber stamp maker is an environmentally friendly solution .
Using a rubber stamp maker online is a straightforward process that requires a few simple steps The online rubber stamp maker is easy to use and requires a few simple steps . First, users need to select a design or template from the platform’s library The website provides a range of designs and templates for users to select from. Next, users can customize their design by adding text, images, or logos The online platform allows users to customize their design with text, images, or logos .
Once the design is complete, users can preview and edit their stamp The website provides a preview feature that enables users to review and modify their design. Finally, users can order their custom stamp and receive it in the mail The rubber stamp maker enables users to purchase their custom stamp and receive it at their doorstep. The rubber stamp maker online also provides customer support and assistance The platform offers help and guidance to users .
In conclusion, the rubber stamp maker online is a convenient and cost-effective solution for creating custom rubber stamps The website offers a user-friendly and affordable solution for creating custom stamps. The rubber stamp maker online offers a wide range of design options and templates, making it suitable for individuals and businesses The platform features a vast array of customizable templates and designs . We recommend using a rubber stamp maker online for all your custom stamp needs The online platform is a recommended solution for creating personalized stamps .
The rubber stamp maker online is a reliable and efficient solution that provides high-quality custom stamps The platform is a trustworthy and effective way to create personalized stamps . Users can create custom stamps with their names, logos, or messages, and receive them in the mail Users can create personalized stamps with their names, logos, or messages and receive them by mail . Overall, the rubber stamp maker online is a great resource for anyone looking to create custom rubber stamps The online rubber stamp maker is a great resource for anyone looking to create custom rubber stamps .
Прайс был обновлен, в продаже появилась Скорость. Сайт скоро будет работать.
https://khartsyzkue.ru
Скрины с радикала не грузятся. Увы сейчас доказать что-либо сложно, видимо магазин не первый раз кидает уже по отточеной цепочке.
Компания специализируется на производство садово парковой мебели, предлагая высококачественные уличные изделия для различных ландшафтов.
При выборе материала для производства садовой мебели учитываются такие факторы, как бюджет, стиль и функциональность мебели.
Процесс производства садовой мебели включает в себя современные технологии, которые позволяют создавать изделия высокого качества.
Варианты дизайна садовой мебели разнообразны, включая классический, современный и рустический стили.
Перспективы производства садовой мебели выглядят оптимистично, поскольку спрос на качественную и комфортную мебель для сада продолжает расти.
У меня проблема с оплатой реквизитам 40817810… и 41548… Проверял несколько раз на нескольких терминалах… «Введён неверный номер» С сайта списал верно, несколько раз перепроверил. Вот так, хочу оплатить, а не могу, готов хоть блиц отправить или ещё как нибудь
https://ilovaisknt.ru
Все посылку получил. ровно 7 дней после оплаты и посылка уже у меня. конспирация отличная.
https://medivertraut.com/# Potenzmittel rezeptfrei kaufen
Обращайтесь всегда рады!
https://luganskbzi.ru
Отличный Магаз, Все четко!!!
BluePeakMeds: Viagra generic price comparison — Sildenafil side effects and safe dosage
Sildenafil online reviews: difference between Viagra and generic Sildenafil — BluePeakMeds
Ладно я признаю что надо было сначало почитать за 907,но с его разведением в дмсо уже все понятно,на форуме четко написанно,что его покупают в аптеке называеться димексид (концентрат),что я и сделал.Должен раствориться был? Все утверждают да! Но он нисколько не растворился,осел в кружке..пробовал и на водяной бане,тоже 0 результата…скажите что я не правильно делаю? 4 фа ваш не я один пробовал,очень слабый эффект,на меня вообще почти не подейсвовал…что мне с JTE делать ума не приложу…может вы JTE перепутали с чем? как он выглядеть то должен?
https://makeevkadj.ru
если так то АМ не подойдет скорее всего
http://medivertraut.com/# sichere Online-Apotheke Deutschland
Дуже відчуваю кожного, хто втомився через щоденного шукання смачних страви! Роком раніше я мала безліч закладок на комп’ютері — одні портали під тортів, декілька для м’ясних страв, треті під рослинних варіантів. Постійно не могла знайти потрібне у цьому лабіринті! Однак коли випадково натрапила на даний ресурс, моє власне гастрономічне приготування пішло на новий рівень! Зараз мені доступний весь необхідний контент в одному місці — від елементарних варіантів для буднів до святкових страв. Особливо люблю той факт, як будь-який ресурси перевірені роками і пропонують логічні , детальні вказівки. Навіть не говорючи що, що тепер роблю страви значно ефективніше — немає необхідності викидати цілий день на шукання
Каталог
https://medivertraut.shop/# Viagra kaufen gГјnstig
Viagra Г–sterreich rezeptfrei Apotheke: Sildenafil Wirkung und Dosierung — Viagra Tabletten
one x bet https://1xbet-giris-1.com/ .
1x bet giri? http://www.1xbet-giris-3.com/ .
difference between Viagra and generic Sildenafil BluePeakMeds how generic Viagra works in the body
http://santehommefrance.com/# Viagra generique pas cher
ну вообщем все ровно получил людей правда от бати но магазин ровный советую
https://donetskgma.ru
скинули трек не бьется ((( уже в четверг отправили а он все не бьется(((, очень торпимся надо человека собирать в дорогу!
что-то отзывы с критикой сплошные( хотел 307 взять..а тут такое..
https://torezljf.ru
на почту не кто не писал
Прекрасные виолы!Нежные и изящные!
доставка цветов в томске