В этом уроке напишем первую программу, научимся считывать значение цифровых входов и устанавливать состояние выходов. Реализуем управление такими простыми элементами, как кнопка и светодиод на платформе Maixduino.
Что нужно знать
Существует 3 фреймворка для разработки приложений для процессора К210:
- Standalone SDK для Kendryte K210;
- Kendryte FreeRTOS SDK — Этот SDK предназначен для Kendryte K210, который содержит поддержку FreeRTOS;
- Arduino (на основе Standalone SDK).
Для работы с периферийными устройствами на Maixduino существует 3 основных компонента: GPIO, GPIOHS и FPIOA.
- GPIO (General Purpose Input Output / Интерфейс ввода/вывода общего назначения) — чип имеет 8 GPIO общего назначения.
- GPIOHS (General Purpose Input Output High Speed / Высокоскоростной интерфейс ввода/вывода общего назначения) – чип имеет 32 высокоскоростных GPIO. Похоже на обычный GPIO, но быстрее.
- FPIOA (Field Programmable I/O Array / Программируемый массив ввода/вывода) позволяет пользователю соотносить 256 внутренних функций с 48 физическими входами / выходами на чипе.
Из этого следует, что Maixduino более гибок, чем простой Arduino на базе микроконтроллеров AVR. Мы можем сопоставить любое устройство с любым физическим контактом (контактами), например, кнопки, светодиоды, устройства I2C и SPI, и т. д.
Создание нового проекта
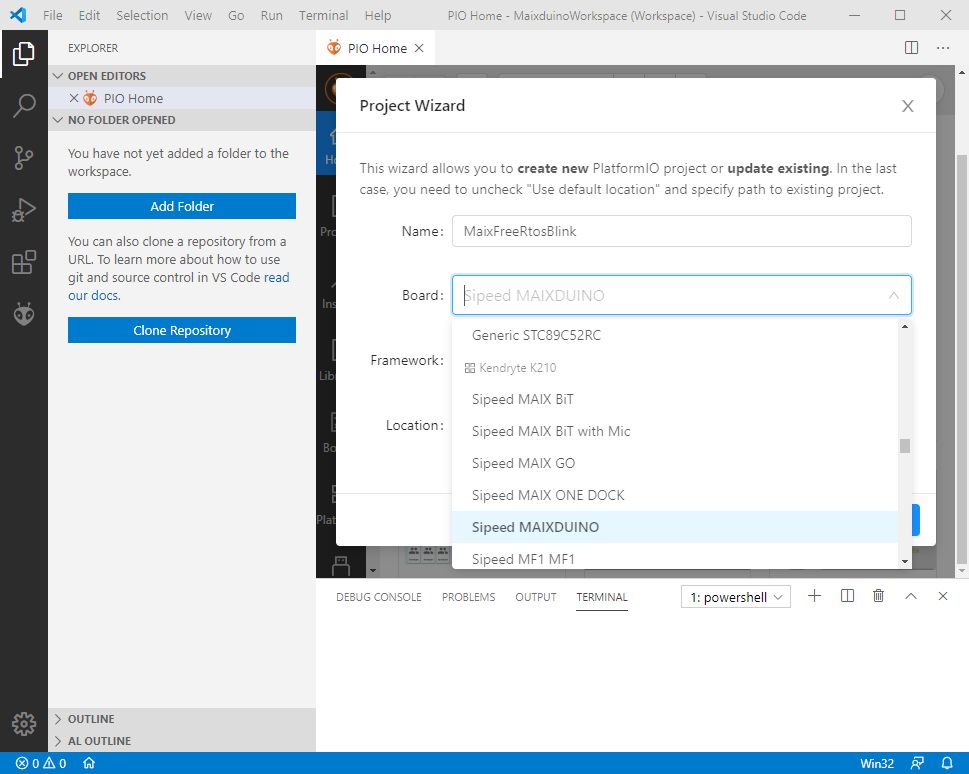
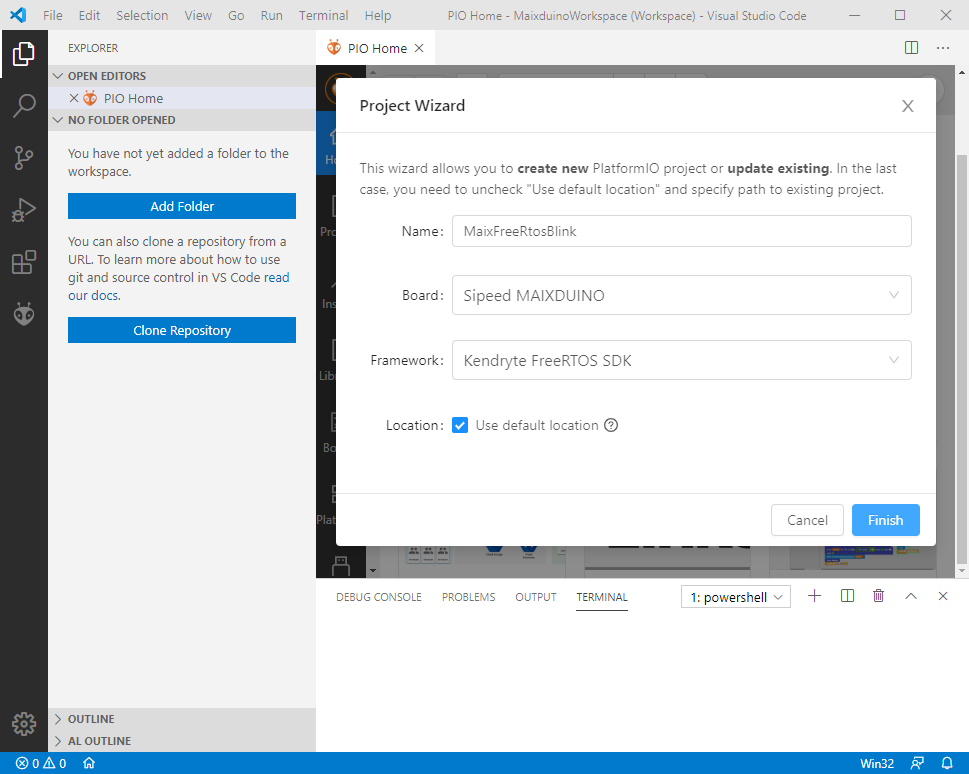
- Открываем PlatformIO: Home и выбираем New Project, чтобы создать новый проект;
- Задаём название проекта в поле Name;
- В Boards ищем плату Sipeed MAIXDUINO;
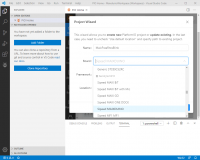
- Выбираем Фреймворк Kendryte FreeRTOS SDK;
- В Location можно указать путь, где будет храниться проект, но можно оставить по умолчанию.
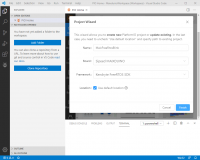
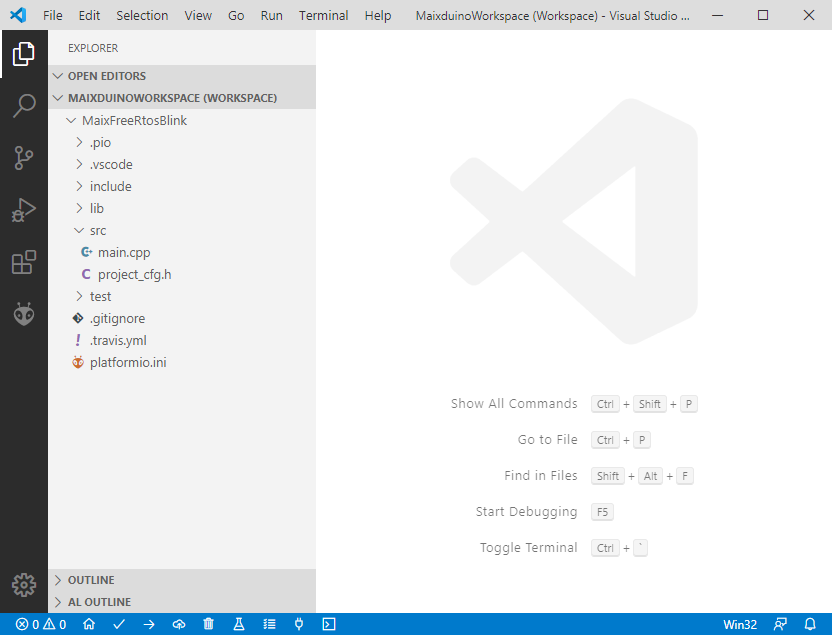
При создании первого проекта, все необходимые файлы и библиотеки будут загружены и установлены автоматически, и это может занять больше времени, чем обычно.
Настройка проекта
В папке src необходимо создать два файла: main.cpp и project_cfg.h. В первом файле мы напишем программу, а во втором мы определим макросы и настроим функции выводов.
В корневом каталоге есть файл platformio.ini — файл конфигурации проекта PlatformIO. По умолчанию PlatformIO автоматически определяет порт загрузки. Но Вы можете настроить собственный порт, используя параметр upload_port. Список портов вы можете найти в Диспетчер Устройств или во вкладке Devices в PIO Home.
В platformio.ini вы также можете изменить скорость загрузки, используя параметр upload_speed, порт монитора, параметр monitor_port, и скорость монитора порта, параметр monitor_speed. Порт загрузки и порт монитора должны совпадать.
Пример файла platformio.ini
; PlatformIO Project Configuration File ; ; Build options: build flags, source filter ; Upload options: custom upload port, speed and extra flags ; Library options: dependencies, extra library storages ; Advanced options: extra scripting ; ; Please visit documentation for the other options and examples ; https://docs.platformio.org/page/projectconf.html [env:sipeed-maixduino] platform = kendryte210 board = sipeed-maixduino framework = kendryte-freertos-sdk upload_port = COM3 upload_speed = 1500000 monitor_port = COM3 monitor_speed = 115200
Как работать с GPIO
Если мы хотим записывать или читать данные из GPIO, мы должны сначала его настроить. Как упоминалось выше, K210 имеет 48 контактов и 256 функций для них. Но поскольку на плате формфактора Arduino количество контактов ограничено, используются не все 48 контактов.
Сначала, чтобы определить, какие контакты и где они назначены, мы должны открыть схему платы — Maixduino-4.30(schematic).pdf. Тут нужно найти разъемы (Connector).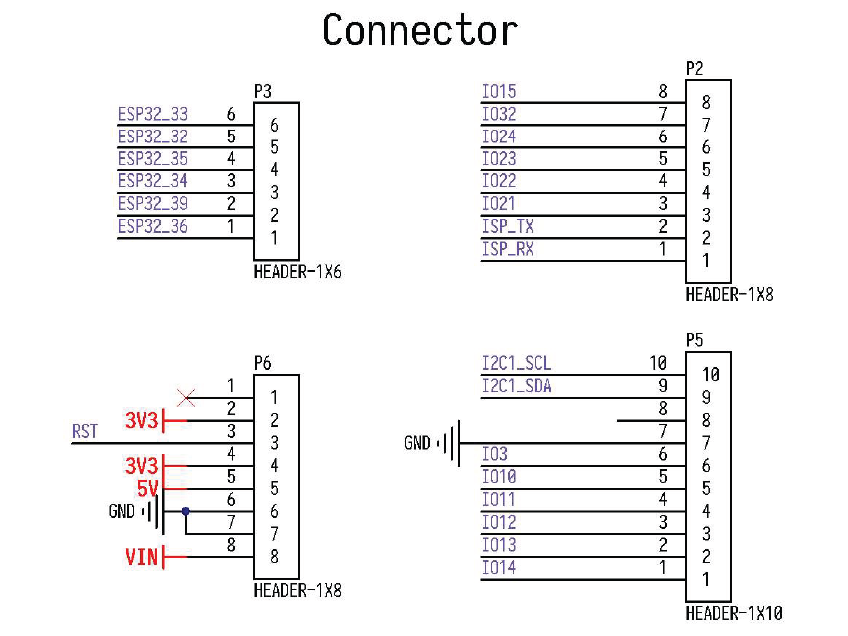
Все контакты разъема P3 (HEADER-1X6) подключены к ESP-32, поэтому его нельзя использовать с K210. Но разъемы P2 и P5 идут на K210, и их можно использовать в качестве контактов ввода-вывода общего назначения.
Настройка порта
Перед настройкой вывода на выход или на вход ему необходимо назначить одну функцию из 32 GPIOHS или 8 GPIO. Это можно сделать двумя способами:
- с использованием функции
int fpioa_set_function (int number, fpioa_function_t function); - с конфигурацией объекта
g_fpioa_cfg.
Первый вариант можно использовать в небольших проектах с небольшим количеством конфигураций или в проектах, которые требуют изменения функции вывода во время работы программы (runtime).
Второй вариант более предпочтителен, поскольку за настройку всех выводов отвечает только один файл, таким образом проект становится более структурированным и читаемым.
В приведенных ниже примерах показано, как соотносить функцию GPIOHS0 на вывод под номером 3 (это вывод IO3 на разъеме P5). Обратите внимание, что перечисление выполняется относительно FUNC_GPIOHS0. В дальнейшем будут использоваться только значения от 0 до 31. Поэтому желательно использовать макросы (#define).
Пример 1:
fpioa_set_function(3, static_cast<fpioa_function_t>(FUNC_GPIOHS0 + 0));
Пример 2:
#ifndef PROJECT_CFG_H
#define PROJECT_CFG_H
#include <pin_cfg.h>
const fpioa_cfg_t g_fpioa_cfg = {
/* Версия */
.version = PIN_CFG_VERSION,
/* Число функций */
.functions_count = 1,
/* Офисание функций */
.functions = {
/* */
{3, static_cast<fpioa_function_t>(FUNC_GPIOHS0 + 0)},
},
};
#endif
После этого необходимо открыть устройство gpio0 с помощью функции io_open.
/* Открываем GPIO0 устройство */
gpio = io_open("/dev/gpio0");
И наконец настраиваем режим работы вывода (пина) – на вход или выход.
/* Устанавливаем режим работы пина 0 на вход. */ gpio_set_drive_mode(gpio, 0, GPIO_DM_INPUT);
/* Устанавливаем режим работы пина 0 на выход. */ gpio_set_drive_mode(gpio, 0, GPIO_DM_OUTPUT);
/* Устанавливаем режим работы пина 0 на вход с подтягивающим резистором (pull-up resistor). */ gpio_set_drive_mode(gpio, 0, GPIO_DM_INPUT_PULL_UP);
/* Устанавливаем режим работы пина 0 на вход с стягивающим резистором (pull-down resistor). */ gpio_set_drive_mode(gpio, 0, GPIO_DM_INPUT_PULL_DOWN);
Примеры программ
Чтобы лучше понять, как всё это работает, приведу два примера программ. Комментарии также будут добавлены в код для более подробного описания.
Пример 1 — мигаем светодиод
В первом примере будем мигать светодиодом, подключенным к одному из выводов платы. В файле project_cfg.h настроим функцию вывода, используемый для мигания светодиода. В файле main.cpp настроим вывод на выход и создадим задачу blinkLedTask, которая будет вызываться с интервалом 100 мс, и при каждом вызове светодиод будет менять свое состояние с ВКЛ на ВЫКЛ и наоборот.
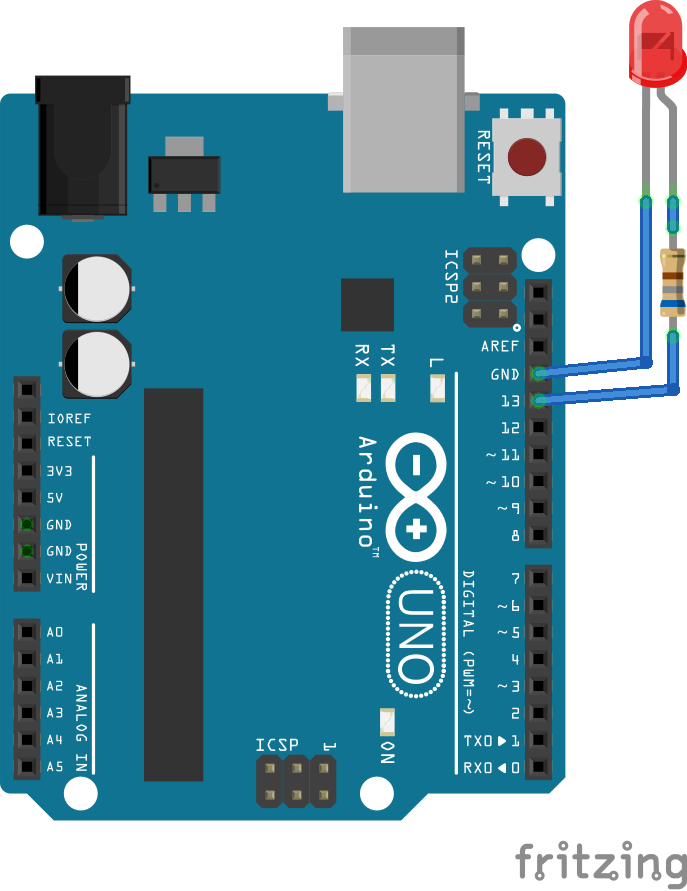
Схема подключения
Светодиод подключается на 13-й контакт Maixduino/Arduino через резистор, ограничивающий ток.
Файл project_cfg.h
#ifndef PROJECT_CFG_H
#define PROJECT_CFG_H
#include <pin_cfg.h>
/**
* Номер внутреннего пина
*/
#define LED_IO (0)
/**
* Номер физического пина
*/
#define LED_PIN (3)
const fpioa_cfg_t g_fpioa_cfg = {
/* Версия */
.version = PIN_CFG_VERSION,
/* Число функций */
.functions_count = 1,
/* Офисание функций */
.functions = {
/* */
{LED_PIN, static_cast<fpioa_function_t>(FUNC_GPIOHS0 + LED_IO)},
},
};
#endif
Файл main.cpp
#include "project_cfg.h"
#include <FreeRTOS.h>
#include <devices.h>
#include <syslog.h>
#include <task.h>
/**
* Указатель на устройство GPIO
*/
static handle_t gpio;
/**
* Текущее состояние светодиода
*/
static gpio_pin_value_t ledState;
/**
* Прототип задачи включения/выключения светодиода
*
* @param pvParameters Функции задач принимают параметр, имеющий тип указателя на void (т. е. void*). Значение, указанное в pvParameters, будет передано в задачу.
*/
static void blinkLedTask(void *pvParameters);
/**
*
*/
int main() {
BaseType_t retCode;
/* Открываем GPIO0 устройство */
gpio = io_open("/dev/gpio0");
/* Перехват ошибок в процессе разработки */
configASSERT(gpio);
/* Устанавливаем режим работы LED_IO пина на выход. */
gpio_set_drive_mode(gpio, LED_IO, GPIO_DM_OUTPUT);
/* Задаём начальное состояние светодиода (выключаем) */
ledState = GPIO_PV_LOW;
/* Пишем состояние в пин */
gpio_set_pin_value(gpio, LED_IO, ledState);
/* Создаём задачу с мигающим светодиодом */
retCode = xTaskCreateAtProcessor(1, &blinkLedTask, "Blink Led task", 512, nullptr, 3, nullptr);
/* Проверяем, если задача была успешно создана */
if (retCode == pdPASS) {
/* В случае успеха выводим информационное сообщение */
LOGI("MFRB", "Blink Led task is running");
} else {
/* В случае неудачи выводим предупреждающее сообщение */
LOGW("MFRB", "Blink Led task start problems");
}
for (;;) {
}
return 0;
}
static void blinkLedTask(void *pvParameters) {
while (1) {
/* Меняем состояние в 1/0 */
if (GPIO_PV_HIGH == ledState) {
ledState = GPIO_PV_LOW;
} else {
ledState = GPIO_PV_HIGH;
}
/* Пишем новое состояние в пин */
gpio_set_pin_value(gpio, LED_IO, ledState);
/* Помещаем задачу в состояние Blocked на фиксированное количество тиков прерываний.
Находясь в состоянии Blocked, задача не использует процессорное время,
поэтому процессор загружен только полезной работой.
С помощью макроса pdMS_TO_TICKS мы конвертируем миллисекунды в тики */
vTaskDelay(pdMS_TO_TICKS(100));
}
}
Пример 2 — кнопка и светодиод
Во втором примере помимо светодиода подключим еще и кнопку. Если кнопка не нажата, светодиод будет менять свое состояние (мигать) каждые 500 мс, а при нажатии — каждые 100 мс. Вывод, подключенный к кнопке, настроен на вход с подтягивающим резистором gpio_set_drive_mode(gpio, BTN_IO, GPIO_DM_INPUT_PULL_UP);.
Схема подключения
Светодиод подключается на 13-й контакт Maixduino/Arduino через резистор, ограничивающий ток, а кнопка на 12-й контакт и GND.

Файл project_cfg.h
#ifndef PROJECT_CFG_H
#define PROJECT_CFG_H
#include <pin_cfg.h>
/**
* Номер внутреннего пина
*/
#define LED_IO (0)
#define BTN_IO (1)
/**
* Номер физического пина
*/
#define LED_PIN (3)
#define BTN_PIN (10)
const fpioa_cfg_t g_fpioa_cfg = {
/* Версия */
.version = PIN_CFG_VERSION,
/* Число функций */
.functions_count = 2,
/* Офисание функций */
.functions = {
/* */
{LED_PIN, static_cast<fpioa_function_t>(FUNC_GPIOHS0 + LED_IO)},
{BTN_PIN, static_cast<fpioa_function_t>(FUNC_GPIOHS0 + BTN_IO)},
},
};
#endif
Файл main.cpp
#include "project_cfg.h"
#include <FreeRTOS.h>
#include <devices.h>
#include <syslog.h>
#include <task.h>
/**
* Указатель на устройство GPIO
*/
static handle_t gpio;
/**
* Текущее состояние светодиода
*/
static gpio_pin_value_t ledState;
/**
* Прототип задачи включения/выключения светодиода
*
* @param pvParameters Функции задач принимают параметр, имеющий тип указателя на void (т. е. void*). Значение, указанное в pvParameters, будет передано в задачу.
*/
static void blinkLedTask(void *pvParameters);
/**
*
*/
int main() {
BaseType_t retCode;
/* Открываем GPIO0 устройство */
gpio = io_open("/dev/gpio0");
/* Перехват ошибок в процессе разработки */
configASSERT(gpio);
/* Устанавливаем режим работы LED_IO пина на выход. */
gpio_set_drive_mode(gpio, LED_IO, GPIO_DM_OUTPUT);
/* Устанавливаем режим работы BTN_IO пина на вход с подтягивающим резистором. */
gpio_set_drive_mode(gpio, BTN_IO, GPIO_DM_INPUT_PULL_UP);
/* Задаём начальное состояние светодиода (выключаем) */
ledState = GPIO_PV_LOW;
/* Пишем состояние в пин */
gpio_set_pin_value(gpio, LED_IO, ledState);
/* Создаём задачу с мигающим светодиодом */
retCode = xTaskCreateAtProcessor(1, &blinkLedTask, "Blink Led task", 512, nullptr, 3, nullptr);
/* Проверяем, если задача была успешно создана */
if (retCode == pdPASS) {
/* В случае успеха выводим информационное сообщение */
LOGI("MFRB", "Blink Led task is running");
} else {
/* В случае неудачи выводим предупреждающее сообщение */
LOGW("MFRB", "Blink Led task start problems");
}
for (;;) {
}
return 0;
}
static void blinkLedTask(void *pvParameters) {
/* Состояние кнопки */
gpio_pin_value_t btnState;
/* Время повторения */
unsigned int timeInMs;
while (1) {
/* Считываетм состояние кнопки. */
btnState = gpio_get_pin_value(gpio, BTN_IO);
if (btnState == GPIO_PV_LOW) {
/* Если кнопка нажата, мы меняем повторяемость задачи на 100 мс. */
timeInMs = 100;
} else {
/* Если нет - 500 мс. */
timeInMs = 500;
}
/* Меняем состояние в 1/0 */
if (GPIO_PV_HIGH == ledState) {
ledState = GPIO_PV_LOW;
} else {
ledState = GPIO_PV_HIGH;
}
/* Пишем новое состояние в пин */
gpio_set_pin_value(gpio, LED_IO, ledState);
/* Помещаем задачу в состояние Blocked на фиксированное количество тиков прерываний.
Находясь в состоянии Blocked, задача не использует процессорное время,
поэтому процессор загружен только полезной работой.
С помощью макроса pdMS_TO_TICKS мы конвертируем миллисекунды в тики */
vTaskDelay(pdMS_TO_TICKS(timeInMs));
}
}
Материалы
Kendryte · GitHub
Maixduino-4.30(schematic)
Maixduino — одноплатный компьютер с ускорителем AI, RISC-V AI, форм-фактор Arduino и беспроводной модуль ESP32
It’s in fact very complicated in this busy life to listen news on Television, therefore I just use the web for that reason, and
obtain the most recent news.
Keep on working, great job!
CBD can now be consumed in taking part in various forms tested by many users, including oils, gainers, powders, https://cannabis-w.com/category-edibles and themselves vapes. which the charm of using disposable vapes with CBD?
Ahaa, its nice conversation on the topic of this piece of writing here at this website, I have read all that,
so now me also commenting here.
I think that everything published was very reasonable. But, consider this, what if you were to write a killer post title?
I ain’t saying your content isn’t solid, but what if you added a title to maybe grab people’s attention? I mean Урок 1.
Управление I/O. Кнопка/светодиод — MicroPi is kinda vanilla.
You could peek at Yahoo’s front page and note how they create news titles to get people to click.
You might add a related video or a pic or two to grab readers interested about everything’ve written. In my opinion, it would bring your website a little livelier.
У меня отличные новости!
Компания Альянс оказывает юридическую потдержку потерпевшим при заливах по своей вине соседей
в Москве и Московской области,
Консультация проводится экспертами в данной сфере, вы без труда сможете полцчить компенсацию ущерба, возместить все расходы на эксперта и юриста.
соседи затопили как возместить ущерб
затопили соседи юрист
залив квартиры юрист
консультация юриста по заливам
консультация юриста по заливу квартиры
юрист по заливам
юрист по заливам москва
юрист по заливу квартиры в бибирево
юрист по заливу квартиры москва
юрист по заливу квартиры спб
адвокат по заливам цена
адвокат по заливу
адвокат по заливу квартиры
цены на услуги адвокатов по заливам
адвокат по заливам цена
адвокат по заливу
адвокат по заливу квартиры
залил квартиру соседей суд
залили квартиру подать в суд
залили квартиру соседи подали в суд
залили квартиру суд
залили квартиру судебная
как выиграть суд если затопил соседей
что делать если затопил соседа суд
затопил соседей суд
затопили соседей снизу возмещение ущерба через суд
затопили соседи в какой суд обращаться
затопили соседи в какой суд подавать
затопили соседи документы в суд
сосед затопил квартиру судебная практика
судебная практика затопили соседи
затопили квартиру суд
залил квартиру соседей суд
залили квартиру подать в суд
залили квартиру соседи подали в суд
залили квартиру суд
затопили соседи иск в суд
соседи затапливают иск в суд
залили квартиру по вине управляющей
залили квартиру по вине управляющей компании
управляющая компания залила квартиру
управляющая компания залила квартиру что делать
затопили соседей по вине управляющей компании
затопили квартиру вина управляющей компании
затопило квартиру по вине управляющей
затопило квартиру по вине управляющей компании
управляющая компания затопила квартиру
управляющая компания затопила квартиру что делать
заливает с крыши квартиру куда жаловаться
заливает квартиру с крыши что делать
залило квартиру с крыши
дождь заливает квартиры
залили квартиру независимая экспертиза
экспертиза залитой квартиры
затопил соседей независимая экспертиза
экспертиза после потопа квартиры
экспертиза потопа квартиры
залили квартиру при тушении пожара
пожарные залили нижнюю квартиру
пожарные залили нижнюю квартиру ущерб
залили квартиру как возместить ущерб
соседи залили квартиру как возместить ущерб
затопили квартиру возместили ущерб соседям
затопили соседей снизу возмещение ущерба
затопили соседи как рассчитать ущерб
затопили соседи взыскать ущерб
затопили соседи моральный ущерб
затопили соседи сверху как взыскать ущерб
квартиранты затопили соседей кто возместит ущерб
соседи затопили как возместить ущерб
ущерб если затопили соседей снизу
возмещение ущерба при потопе квартиры
ущерб от потопа квартиры
соседей нет дома затапливают квартиру
затапливает квартиру
затапливает квартиру что делать
затапливают квартиру водой
затапливают квартиру прорвало трубу
прорвало стояк затопили соседей
прорвало стояк затопили соседей кто виноват
прорвало стояк затопили соседей что делать
протек стояк затопили соседей кто виноват
залил квартиру снизу что делать
залил квартиру соседей снизу что делать
залила квартиру соседей снизу
что делать если затопил соседей снизу
затопил соседа снизу как не платить
затопил соседей снизу какой что делать
затопил соседей снизу какой порядок действий
затопила соседей снизу сколько платить
затопили соседей снизу
затопили соседей снизу но у нас сухо
затопили соседей снизу что делать кто виноват
затопили соседей снизу возмещение
затопило соседей снизу что делать дальше
немного затопил соседей снизу что делать
сосед сверху затопил квартиру
залили квартиру соседи сверху мои действия
залили квартиру соседи сверху что делать
залило квартиру сверху что делать
залита водой квартира сверху
залита квартира сверху
соседи сверху залили квартиру
соседи сверху залили квартиру куда обращаться
как действовать если затопили соседи сверху
кого вызывать если затопили соседи сверху
что делать если затапливают соседи сверху
что делать если затопили соседи сверху
что делать если затопили соседи сверху какие
что делать затопили соседи сверху какие действия
действия затопил сосед сверху
затапливает сосед сверху
затопили соседи сверху
затопили соседи сверху как взыскать
затопили соседи сверху как взыскать деньги
затопили соседи сверху что делать куда
затопили соседи сверху что делать куда обращаться
затопили соседи сверху ванной
затопили туалет соседи сверху
затопило квартиру по вине соседей сверху
куда жаловаться если затопили соседи сверху
куда жаловаться затапливают соседи сверху
обращаться затопили соседи сверху
порядок действий если затопили соседи сверху
постоянно затапливают соседи сверху что делать
сосед затопил сверху что делать по закону
соседи сверху затапливают куда обращаться
затопили квартиру сверху
затопило квартиру сверху что делать
затапливают квартиру соседи
что делать если соседи постоянно затапливают
затапливают соседи
затапливают соседи что делать
затапливают соседи куда обращаться
что делать если затопили соседи
соседи затапливают балкон
соседи затапливают квартиру что делать
соседи затопили квартиру
соседи затопили квартиру что делать
затопили соседи
затопили соседи как себя вести
затопили соседи как доказать
затопили соседи как оформить
затопили соседи кому звонить
затопили соседи на 2 этажа выше
затопили соседи не хотят платить
затопили соседи что делать пошаговая
затопили соседи что делать пошаговая инструкция
затопили соседи вода в натяжном потолке
затопили соседи вызывать полицию
затопили соседи действия
затопили соседи какие действия
затопили соседи куда
затопили соседи куда жаловаться
затопили соседи ламинат
затопили соседи ночью
затопили соседи отказываются платить
затопили соседи последствия
затопили соседи ремонт
затопили соседи сбоку
затопили соседи сразу
затопили соседи срок давности
затопило квартиру соседями с верхнего этажа
порядок действий если затопили соседи
сосед затопил квартиру и не хочет платить
сосед затопляет участковый
соседи затопили балкон
соседи затопили квартиру и отказываются оплатить
соседи затопили отключили воду
соседи затопили потолок
соседи немного затопили что делать
умерший затопил соседей
затопили квартиру куда обращаться
затопило квартиру
затопило квартиру кто виноват
затопило квартиру по вине
затопило квартиру что делать
затопило квартиру водой
затопило квартиру москва
сосед затопил квартиру куда обращаться
затопил сосед горячей водой
затопил соседей что грозит
затопил соседей сколько платить
затопили соседей как действовать
затопили соседей что делать куда обращаться
затопили соседей стяжкой
затопили технику соседей
кот открыл кран и затопил соседей
куда обращаться если затопили соседи
лопнул шланг затопили соседей
лопнула батарея затопили соседей кто виноват
лопнула гибкая подводка затопили соседей
лопнула гибкая подводка затопили соседей кто виноват
лопнула подводка затопил соседей
муниципальная квартира затопила соседей
потекла батарея затопили соседей
прорвало трубу затопили соседей
прорвало шланг затопили соседей
прорвет затопите соседей
протек счетчик воды затопил соседей чья вина
ребенок затопил соседей
сорвало кран затопили соседей кто виноват
соседи говорят что их затопили
холодильник затопили соседи
кот затопил квартиру
прорвало трубу в квартире затопили соседей
прорвало трубу затопило квартиру
квартирант затопил соседей кто отвечает
квартирант затопил соседей кто платит
квартиранты затопили соседей что делать
наниматель затопил соседей
квартиранты затопили соседей снизу кто
квартиранты затопили соседей снизу кто платит
квартиранты затопили соседей снизу что делать
рабочие затопили соседей
снимаю квартиру затопили соседи
арендатор затопил соседей кто возмещает ущерб
затопили соседей квартира съемная
квартиросъемщик затопил соседей
квартиросъемщик залил вашу квартиру и умер
арендаторы затопили соседей кто будет платить
жильцы затопили соседей
затопили ванну соседи сверху
соседи сверху затопили ванную комнату
соседи затопили ванну
соседи затопили ванную что делать
соседи затопили ванную комнату
затопили соседи сверху квартира застрахована
квартира застрахована затопили соседи сверху что делать
затопили соседи страховой случай
затопили соседей какая страховка
затопила соседей квартиры застрахованы
залили застрахованную квартиру что делать
залили застрахованную квартиру соседей
залита застрахованная квартира
затопило застрахованную квартиру
затопили соседи сверху составить акт
соседи затопили что делать составлен акт протечки
иск залили квартиру
исковое заявление залили квартиру
затопили соседи иск
затопили соседи исковое
залило квартиру акт
претензия залили квартиру
претензия соседям затопившим квартиру
квартира в ипотеке затопили соседи
залили квартиру ипотека
соседи затопили ипотечную квартиру
если залил квартиру соседу
залили квартиру что делать виновнику
сосед залил квартиру что делать
сосед залил квартиру куда обратиться
соседи залили квартиру как возместить
соседи залили квартиру что делать куда обращаться
соседи залили квартиру порядок действий
если залили квартиру что делать
если соседи залили квартиру к кому обращаться
залили водой квартиру что делать
залили квартиру
залили квартиру кто виноват
залили квартиру что делать куда обращаться
залили квартиру что делать пострадавшему
залили квартиру горячей водой
залили квартиру кипятком
залили квартиру москва
залили квартиру порядок действий
залили муниципальную квартиру
залило пол в квартире что делать
залило проводку в квартире
залило стены в квартире
квартиру залило водой
квартиру залило через
канализация затопила квартиру
квартиру залило говном
заливает квартиру канализацией
затапливают квартиру канализацией
к кому обращаться если затопили соседи
кто должен платить если затопили соседей
при заливке пола затопили соседей
аквариум затопил соседей
верхний этаж затопили соседей
виноватый затоплять сосед
заливали пол затопили соседей
затапливаю соседей в туалете
затопил квартиру соседей какая ответственность
компенсация ущерба от залива
исковое заявление о компенсации залива
компенсация за залив
компенсация за залив квартиры
компенсация морального вреда при заливе
компенсация морального вреда залив квартиры
получить компенсацию залив
заливает квартиру постоянно
заливает потолок в квартире
заливают квартиру куда обращаться
куда жаловаться на соседей которые заливают квартиру
куда звонить если заливает квартиру
куда звонить если заливает квартиру в москве
соседи заливают квартиру и не открывают
соседи постоянно заливают квартиру что делать
кого вызывать при потопе в квартире
потоп в квартире
потоп в квартире куда звонить
потоп в чужой квартире
потоп воды в квартире
произошел потоп в квартире
затопили соседи оценщик
оценка залитой квартиры
оценка после потопа квартиры
This post will help the internet people for creating new weblog or even a blog from start to
end.
Artikel ini sangat menarik dan informatif! Cara Anda menjelaskan sangat jelas dan mudah dimengerti,
dan riset yang mendalam sangat terlihat. Cara Anda menulis juga sangat menarik.
Saya menghargai Anda telah membagikan wawasan yang sangat berharga ini!
An intriguing discussion is definitely worth comment.
There’s no doubt that that you should publish more on this subject, it might not be a
taboo subject but generally people don’t speak about such
issues. To the next! Cheers!!
I’m amazed, I have to admit. Rarely do I encounter a blog that’s equally educative and entertaining, and without a doubt, you have hit
the nail on the head. The problem is something too few men and women are speaking intelligently about.
I’m very happy I came across this in my hunt for something regarding this.
We’re a group of volunteers and opening a new scheme in our community.
Your web site offered us with valuable info to work on. You’ve
done an impressive job and our entire community will
be thankful to you.
Hello all, here every person is sharing these kinds of know-how, thus it’s nice to read this web site, and I
used to pay a quick visit this blog all the time.
1Win – Бонусы для всех новых игроков
на официальном сайте 1win игровые автоматы онлайн
Amazing! Its in fact amazing paragraph, I have got much clear
idea regarding from this post.
Excellent post. I used to be checking continuously this weblog and I am inspired!
Extremely useful info specifically the ultimate part 🙂 I handle such info a lot.
I used to be seeking this particular info for a long time.
Thanks and best of luck.
Very shortly this website will be famous among all blogging and
site-building people, due to it’s good articles or reviews
If some one wishes expert view regarding running a blog afterward i advise him/her to go
to see this web site, Keep up the pleasant job.
You actually make it seem really easy along with
your presentation however I find this matter to be actually one thing that I believe I’d by
no means understand. It sort of feels too complicated and extremely wide for me.
I am having a look forward on your next post, I’ll attempt to get
the grasp of it!
Cryptoboss Casino – Играй с криптовалютами без границ http://miupsik.ru/forums/member.php?action=profile&uid=14048
Howdy excellent website! Does running a blog like this require
a lot of work? I’ve no expertise in computer programming
however I was hoping to start my own blog soon. Anyhow, should you have any recommendations or tips for new blog owners
please share. I know this is off subject nevertheless I
just needed to ask. Thank you!
Visit my website; Daycare Near Me — Find The Best Daycares Near You
Your work is absolutely excellent and meaningful.
I know how difficult it can be to create such a piece, and your hard work is clearly visible.
Don’t stop writing, as your writing means a lot. I appreciate
you sharing this valuable insight!
Hurrah! At last I got a blog from where I be capable of truly obtain helpful information regarding my study and knowledge.
I’m more than happy to find this great site. I
want to to thank you for your time due to this fantastic read!!
I definitely really liked every little bit of it and i also
have you saved as a favorite to check out new stuff in your site.
I must thank you for the efforts you’ve put in writing this site.
I really hope to view the same high-grade content by you later on as well.
In fact, your creative writing abilities has encouraged me to get my
very own website now 😉
Here is my web page — servizi di traduzione giuridica
This page really has all of the info I wanted about this subject and didn’t know who to ask.
Криптобосс – Азарт в каждом клике!
казино с криптовалютой
Awesome article.
Продажа мини-погрузчиков Lonking
Продажа мини-погрузчиков Lonking на территории России от официального
дистрибьютора. Новая многофункциональная техника для любых задач.
Наши машины предназначены для того, чтобы упростить вашу работу:
от строительных площадок до складских операций.
Высокая эффективность, надежность и инновационные решения — все,
что вам нужно для успешных проектов. Погрузите свой бизнес в будущее
с мини-погрузчиками Lonking!
47% российских покупателей выбрали мини-погрузчики Lonking в 2023 году продано более 1200 единиц.
Мини-погрузчики Lonking
You really make it appear really easy with your presentation however I to
find this topic to be actually one thing that I believe I might by no means understand.
It seems too complex and extremely wide for me. I’m looking ahead on your next
put up, I will attempt to get the grasp of it!
It’s going to be finish of mine day, however before end I am reading this wonderful article to increase my
knowledge.
betting offer codes: Bonus codes are unique codes provided by betting sites that players can enter to receive exclusive offers like deposit bonuses, free bets, or risk-free bets. These codes are often available during promotions.
Если вы хотите придать уникальность своему автомобилю и создать неповторимый образ, то на сайте baikalwheels.ru у вас есть возможность продажа литых дисков популярных мировых брендов. В каталоге представлены такие бренды, как Replika, Nitro, Legeartis и K&K, которые имеют отличную репутацию. Размеры варьируются от 16 до 22 дюймов, что помогает найти идеальные диски для любых автомобилей — от седанов до внедорожников.
Wow that was unusual. I just wrote an really long comment
but after I clicked submit my comment didn’t show up.
Grrrr… well I’m not writing all that over again.
Anyways, just wanted to say superb blog!
Веселые анекдоты
Отдохни и посмейся
Usually I don’t learn post on blogs, but I
would like to say that this write-up very forced me to check out and do so!
Your writing style has been amazed me. Thank you, very great post.
Přijetí hypoteční platby může být problematické pokud nemáte rádi čekání v dlouhých řadách , vyplnění
vážný formuláře , a odmítnutí úvěru na základě vašeho úvěrového
skóre . Přijímání hypoteční platby může být problematické, pokud nemáte rádi čekání v dlouhých řadách ,
podávání extrémních formulářů , a odmítnutí úvěru
na základě vašeho úvěrového skóre . Přijímání hypoteční platby může být problematické ,
pokud nemáte rádi čekání v dlouhých řadách ,
vyplnění extrémních formulářů a odmítnutí úvěrových rozhodnutí založených na úvěrových skóre .
Nyní můžete svou hypotéku zaplatit rychle a efektivně v České republice. https://groups.google.com/g/sheasjkdcdjksaksda/c/TiyKfYP1p58
At this time it looks like BlogEngine is the preferred blogging platform available right now.
(from what I’ve read) Is that what you are using on your blog?
Hi there, every time i used to check web site posts here in the
early hours in the morning, as i enjoy to learn more and more.
I am genuinely pleased to read this website posts which consists of tons of useful data, thanks for providing these data.
Hello, after reading this awesome piece of writing
i am too delighted to share my experience here with mates.
If some one desires to be updated with most up-to-date technologies after that he
must be visit this web site and be up to date everyday.
I every time used to study article in news papers but now as I am a user
of net so from now I am using net for articles, thanks to web.
Good day! Do you know if they make any plugins to protect against hackers?
I’m kinda paranoid about losing everything I’ve worked hard
on. Any suggestions?
Pretty! This has been a really wonderful post. Thank you for providing these details.
Криптобосс Казино: Играй и выигрывай с криптовалютой https://by-it.ru/
Если вам нужны микрозаймы на карту от 1 до 30 тысяч рублей без проверок, Микрозаймы онлайн без отказов под 0% предлагает список микрофинансовых организаций, которые выдают деньги онлайн с 18 лет. Здесь вы найдете варианты без отказов и с мгновенным зачислением средств на карту. Подписывайтесь на канал, чтобы не упустить выгодные предложения и быстро решить финансовые вопросы.
Ищете быстрый способ получить деньги? У нас собраны лучшие займ онлайн на карту без отказа без проверки мгновенно для всех от 18 лет, даже с плохой кредитной историей.
ржачные картинки. Как они появились.
Hello, i think that i saw you visited my weblog thus i came
to “return the favor”.I’m attempting to find things
to enhance my web site!I suppose its ok to use a few of your
ideas!!
Thank you for every other fantastic post.
The place else could anyone get that kind of
information in such a perfect approach of writing?
I have a presentation next week, and I am at the search for such information.
Hello there, You have done an excellent job. I’ll definitely digg it and personally suggest to my friends.
I’m sure they will be benefited from this web site.
We’re a group of volunteers and opening a new scheme in our community.
Your site provided us with valuable information to work on. You have done a formidable job and our whole community will be thankful to
you.
Hi it’s me, I am also visiting this website daily, this website is genuinely fastidious and the people are genuinely sharing
pleasant thoughts.
Your work is truly outstanding and meaningful. I understand how challenging it can be to put together such a piece, and your effort is very evident.
Keep up the great work, as your writing means a lot. I appreciate you
sharing this valuable insight!
I would like to thank you for the efforts you
have put in writing this site. I am hoping to see the same high-grade content from you later on as well.
In truth, your creative writing abilities has motivated me to
get my own, personal blog now 😉
You made some good points there. I checked on the internet for additional information about the issue
and found most individuals will go along with your views on this site.
Excellent site. Plenty of helpful information here.
I am sending it to several pals ans additionally sharing
in delicious. And of course, thank you on your sweat!
This piece of writing will help the internet visitors for setting up new website or even a weblog from start to
end.
Hello! Do you know if they make any plugins to safeguard against hackers?
I’m kinda paranoid about losing everything I’ve worked hard on. Any
recommendations?
We stumbled over here coming from a different website and thought I might
as well check things out. I like what I see so i
am just following you. Look forward to looking into your web page yet again.
1xBet New Promo Code https://idematapp.com/wp-content/pages/1xbet_promo_codes_free_bonus_offers.html
1xBet frequently releases new promo codes that provide users with updated bonuses and promotions. These codes can include anything from free bets to deposit matches and are available to both new and existing users.
I’m extremely impressed with your writing skills and also with
the layout on your weblog. Is this a paid theme or did you customize it yourself?
Either way keep up the nice quality writing, it
is rare to see a great blog like this one nowadays.
Also visit my web-site … localizzazione siti
займы которые дают всем
Hi there outstanding website! Does running a blog such as this take a massive amount work?
I’ve no expertise in coding however I had been hoping to start my own blog in the near future.
Anyway, if you have any recommendations or tips for
new blog owners please share. I know this is off topic nevertheless I simply had
to ask. Appreciate it!
Ahaa, its fastidious conversation concerning this paragraph at this place at this webpage,
I have read all that, so at this time me also commenting here.
Howdy, I do think your blog may be having browser compatibility issues.
When I take a look at your blog in Safari, it looks fine however when opening in Internet
Explorer, it has some overlapping issues. I just wanted to
provide you with a quick heads up! Other than that, wonderful blog!
Hello, I think your blog might be having browser compatibility issues.
When I look at your blog in Firefox, it looks fine but when opening
in Internet Explorer, it has some overlapping. I just wanted to give you a quick heads up!
Other then that, very good blog!
I like what you guys tend to be up too. This
sort of clever work and exposure! Keep up the wonderful works
guys I’ve added you guys to my personal blogroll.
What’s Happening i am new to this, I stumbled upon this I have
found It positively useful and it has aided me out loads.
I am hoping to contribute & aid other users like its helped me.
Good job.
Greate article. Keep posting such kind of info on your page.
Im really impressed by your blog.
Hey there, You have performed a great job. I’ll definitely digg it and for my
part suggest to my friends. I am confident they’ll be
benefited from this website.
Вызов сантехника https://santekhnik-moskva.blogspot.com/p/v-moskve.html на дом в Москве и Московской области в удобное для вас время. Сантехнические работы любой сложности, от ремонта унитаза, устранение засора, до замены труб.
Hey I am so excited I found your blog page, I really found you by
mistake, while I was researching on Digg for something else, Regardless I am here
now and would just like to say kudos for a fantastic
post and a all round thrilling blog (I also love the theme/design), I don’t have time to go through it
all at the moment but I have saved it and also added in your
RSS feeds, so when I have time I will be back to read a lot more,
Please do keep up the fantastic work.
Интернет-магазин плитки и керамики «ИнфоПлитка»
Интернет-магазин керамической плитки и керамогранита «Infoplitka» (infoplitka.ru)
предлагает широкий ассортимент высококачественной плитки и керамогранита от ведущих производителей.
Мы стремимся предложить нашим клиентам только лучшее, поэтому в ассортименте представлены товары,
отвечающие самым высоким стандартам качества и дизайна.
Мы понимаем, что выбор керамической плитки и керамогранита – это важный этап в создании
комфортного и стильного интерьера. Поэтому наша команда профессионалов готова помочь вам в
подборе идеального варианта для вашего проекта. Независимо от того, нужны ли вам плитка
для ванной комнаты, кухни, гостиной, или же керамогранит для облицовки пола, вы всегда найдете
у нас разнообразные и актуальные коллекции, соответствующие последним тенденциям в области
дизайна интерьеров.
Официальный сайт «ИнфоПлитка»
Digital advertising and marketing covers a large variety of services, from search engine optimization and content marketing to social networks monitoring and pay per click advertising. A reliable Prague Online marketing agency, such as Lucky Brand, commonly offers extensive services under one roof. This makes it possible for businesses to streamline their marketing attempts, making certain congruity and coherence throughout all channels, https://capps-estrada.federatedjournals.com/pokyn-vyberu-digitalni-reklama-spolecnosti-v-praze.
It is really a nice and useful piece of info. I’m happy
that you just shared this useful information with us.
Please stay us informed like this. Thank you for sharing.
Superb website you have here but I was curious about
if you knew of any user discussion forums that cover the same topics discussed in this article?
I’d really like to be a part of online community where I can get feedback from other experienced people that share the
same interest. If you have any recommendations, please let me know.
Cheers!
Hi there Dear, are you in fact visiting this website daily, if so afterward you will definitely take
nice know-how.
The other day, while I was at work, my cousin stole my apple ipad and tested to
see if it can survive a 40 foot drop, just so she can be a youtube sensation. My
iPad is now destroyed and she has 83 views. I know this is totally off topic but I had
to share it with someone!
It’s a shame you don’t have a donate button! I’d definitely
donate to this brilliant blog! I suppose for now
i’ll settle for book-marking and adding your RSS feed to my Google account.
I look forward to new updates and will share this website with my Facebook group.
Talk soon!
Thanks for the good writeup. It actually was once a enjoyment
account it. Glance complicated to more added agreeable from you!
By the way, how can we communicate?
Thanks for every other informative site. Where else may I get that type
of information written in such a perfect method? I have a mission that I’m simply now working on, and I’ve been at
the glance out for such information.
Hi there everyone, it’s my first pay a visit at this site, and piece
of writing is truly fruitful in favor of me, keep
up posting these types of content.
This article provides clear idea in support of the new people of blogging,
that really how to do blogging and site-building.
Hello, I enjoy reading through your post. I wanted to write a little comment to support you.
Aw, this was a really nice post. Finding the time and actual
effort to generate a superb article… but what can I say… I hesitate a whole lot and
don’t seem to get anything done.
At this moment I am going away to do my breakfast, after having my breakfast coming
over again to read other news.
Hi there, just became aware of your blog through Google, and
found that it is really informative. I am going to watch
out for brussels. I will appreciate if you continue this in future.
Numerous people will be benefited from your writing.
Cheers!
Its like you learn my thoughts! You seem to grasp so much approximately this, like
you wrote the ebook in it or something. I feel that you
could do with a few p.c. to pressure the message home a bit, but instead of that,
that is great blog. An excellent read. I will definitely be
back.
Найти специалиста по независимой экспертизе и оценке!
Сайт-агрегатор компаний и услуг в сфере независимой экспертизы и оценки.
Мы создали этот проект, чтобы помочь вам найти надежных и опытных профессионалов
для решения ваших задач.
Главная цель — сделать процесс поиска специалистов по независимой экспертизе
и оценке максимально простым и эффективным. Мы стремимся предоставить вам
доступ к компаниям, которые гарантируют высокое качество услуг.
С нами вы сможете быстро найти нужного эксперта и сравнить различные предложения.
На нашем сайте собраны карточки компаний, каждая из которых содержит подробную
информацию о предоставляемых услугах. Посетители могут фильтровать предложения
по различным критериям:
Локация
Направление экспертизы
Стоимость услуг
Отзывы клиентов
Наш сайт Специалисты по независимой экспертизе и оценке.
I was curious if you ever considered changing the layout of your blog?
Its very well written; I love what youve got to say.
But maybe you could a little more in the way of content so people could connect with it better.
Youve got an awful lot of text for only having one or two images.
Maybe you could space it out better?
Excellent post. Keep posting such kind of information on your page.
Im really impressed by your site.
Hello there, You’ve performed a great job. I’ll definitely digg it and in my view suggest to my friends.
I am confident they will be benefited from this site.
I have been exploring for a little bit for any high quality articles or weblog posts on this sort
of house . Exploring in Yahoo I ultimately stumbled upon this website.
Reading this information So i am glad to express that I’ve a
very good uncanny feeling I came upon exactly what I needed.
I such a lot surely will make certain to do not put out of
your mind this web site and provides it a glance regularly.
Does your site have a contact page? I’m having trouble locating it but, I’d like to send you an e-mail.
I’ve got some recommendations for your blog you might be interested in hearing.
Either way, great blog and I look forward to
seeing it develop over time.
Also visit my web blog Online poker tournaments
Greetings from Los angeles! I’m bored to tears at work so I decided to browse your blog on my iphone during lunch break.
I enjoy the information you provide here and can’t wait to take a look
when I get home. I’m surprised at how fast your blog loaded on my
phone .. I’m not even using WIFI, just 3G .. Anyhow, excellent site!
Great delivery. Sound arguments. Keep up the great effort.
Hi there to every one, the contents present at this web site are in fact
amazing for people experience, well, keep up the nice work fellows.
Jogja, kota nan dikenal dan jamal budayanya lagi kekariban warganya,
menjadi galat se- poin liburan kesukaan pada Indonesia. Setiap
warsa, beribu-ribu pelawat berbondong-bondong mengunjungi metropolitan ini mendapatkan menikmati berbagai rupa lapak menarik, mulai tentang Candi Borobudur hingga Malioboro yang legendaris.
Bagi Sampeyan yang mengatur penerbangan ke Jogja bersama-sama golongan, galat suatu tin-tingan pengangkutan yang
berat direkomendasikan yaitu Hiace Premio.
Akan tetapi, sebelum Saudara memutuskan untuk menyewa, berharga bakal menginsafi faedah sewa Hiace Premio
di Jogja per musim mudah-mudahan bisa memikirkan perkiraan menggunakan baik.
Sewa Hiace Premio di Jogja kebanyakan memiliki selingan kadar tersila pada jumlah hal, bak masa, termin carter, selanjutnya penyedia layanan persewaan. Hitung panjang, nilai sewa Hiace Premio di Jogja berkisar
antara Rp 1.200.000 hingga Rp 1.800.000 per yaum.
Derajat ini rata-rata sudah terjumlah pengendara lalu
bayaran selumbar bakar, akan tetapi bisa bervariasi terjumbai
garis haluan sendiri-sendiri penyedia.
Luput iso- penyebab nan mempengaruhi derajat carter adalah waktu
tur. Dekat saat peak season, laksana saat preinan sekolah maupun musim raya, kualitas
sewa cenderung lebih tinggi. Menurut menjimatkan upah, ada baiknya Anda mengarang hijrah dalam luar waktu puncak.
Walakin, andaikata darmawisata Saudara tidak bisa dihindari pada
saat peak season, pastikan menurut melayani pemesanan jauh-jauh keadaan kepada mengamankan kepentingan terbaik.
Strategis saja menurut mengendus bahwa ada semua bingkisan sewa nan ditawarkan. Kurang lebih penyedia layanan rental Hiace Premio
sepertinya menegosiasikan antaran surat kabar, mingguan, alias sampai-sampai bulanan. Asalkan Dikau
berencana sepanjang menyewa dalam batas hidup lama, sewajarnya
tanyakan apakah ada potongan harga maupun promo khusus
buat kontrak masa panjang. Perkara ini bisa sungguh-sungguh menguntungkan, terutama andaikata Kamu menjalankan isra beriringan kawanan besar.
Selain itu, perhatikan serta prasarana nan ditawarkan dalam kuota sewa.
Lazimnya, arti sewa sudah mencakup penyetir yang berpengalaman dan ramah, serta asuransi sepanjang mengasung menyeberangi aman selagi darmawisata.
Namun, semua penyedia agak-agak menyodorkan sarana lampiran, lir
tirta mineral, snack, atau layanan mengiringi jemput
dari bersama ke bandara. Pastikan mendapatkan mempersunting serpih ini biar Engkau menjumpai kemahiran terbaik
selama pada Jogja.
Keberadaan Hiace Premio yang spacious lagi sejuk
terus menjadi keterangan apa sebab banyak jiwa memilihnya bagai organ mendapatkan grup.
Hiace Premio bisa menampung hingga 14 pendompleng,
sehingga cocok perlu kunjungan bangsa, urusan biro, ataupun trip serempak teman-teman. Tempat ruang yang
luas selanjutnya jok yang empuk mau menyebabkan isra jauh terasa lebih menyenangkan. Ditambah lagi, AC
yang dingin selanjutnya pola audio nan baik melahirkan hijrah semakin fit dan bebas oleh
karena kejenuhan.
Seandainya Kamu menduga rental Hiace Premio di Jogja, ada banyak alternatif nan bisa Tuan pertimbangkan. Dikau bisa menggeledah warta melalui internet, corong sosial, atau bertanya mendapatkan teman nan pernah bertandang ke Jogja
sebelumnya. Pastikan selama membandingkan sebanyak
penyedia layanan biar bisa menjumpai martabat maka
kelonggaran yang bertemu memakai keperluan Sira.
Mono- pedoman lanjutan, tiada ragu perlu membaca penelitian ketimbang pelanggan sebelumnya.
Ini bagi memberikan kisah perkara kualitas layanan serta
hal alat nan disewakan. Sebenarnya seleksi penyedia yang mempunyai nama baik baik lagi menangkap banyak review positif agar penerbangan Sampeyan lebih lancar dengan menyenangkan.
Saat memutuskan akan menyewa Hiace Premio, ada kaum situasi
nan perlu diperhatikan. Perdana, pastikan Awak memahami tulisan nasib carter,
termaktub jam operasional, belanja perpanjangan semisal mengalahkan weker kontrak, pula khitah pengembalian alat transportasi.
Kedua, pastikan Tuan mencoba kerangka wahana sebelum berangkat.
Situasi ini utama menurut menentukan bahwa instrumen dalam stan baik dan aman bagi
digunakan.
Setelah menginsafi guna beserta kejadian-kondisi mendesak dekat-dekat sewa Hiace Premio di Jogja,
Kamu bisa mulai mengatur itinerary isra
atas lebih baik. Cobalah sepanjang mengunjungi berjenis-jenis ruang menarik di Jogja, mulai sejak letak
kenangan kaya Candi Prambanan hingga alam kuliner yang legendaris.
Menggunakan angkutan yang bugar, Kamu serta perhimpunan bisa menjelajahi setiap sudut Jogja minus
repot.
Bersama-sama arti carter nan relatif terjangkau, Hiace Premio menganjurkan kenaiman lagi kemudahan dalam pelawatan. Malahan sekiranya Dikau melancarkan hijrah dalam
golongan besar, sewa Hiace Premio menjadi kesukaan yang lebih
ekonomis dibandingkan memakai setengah tunggangan kecil.
Semua pengikut terup dapat berpergian serentak, berbagi deskripsi,
maka menikmati detik kebersamaan dekat dalam media.
Selaku kebulatan, sewa Hiace Premio di Jogja adalah opsi
yang bukan alang kepalang baik menurut transportasi kumpulan.
Pada maslahat nan bervariasi walakin tetap terengkuh, Tuan bisa merasakan pengetahuan kunjungan nan enak
lalu menyenangkan. Jadi, coba Sira mereka-reka petualangan ke Jogja, tidak ragu
selama mengenapkan carter Hiace Premio jadi penyelesaian pengiriman Tuan. Lewat perencanaan yang baik, Engkau untuk mendeteksi keahlian preinan nan tidak terbangkang dekat pura istimewa ini.
Its like you learn my mind! You appear to understand a lot about this,
such as you wrote the e book in it or something. I feel that you can do
with a few percent to force the message house a
little bit, but other than that, that is fantastic blog.
A fantastic read. I will definitely be back.
Highly descriptive blog, I loved that bit. Will there be a part 2?
Ihr Glücksspielweg beginnt mit Casinia Casino https://clearcreek.a2hosted.com/index.php?action=profile;u=455690
Hi, i think that i saw you visited my web site so i came to
“return the favor”.I’m trying to find things
to improve my website!I suppose its ok to use some of your ideas!!
my website … preventivo traduzione tecnica
It’s hard to come by experienced people on this topic, but you seem like you know what
you’re talking about! Thanks
Jogja, praja yang dikenal seraya kepermaian budayanya serta keramahan warganya, menjadi galat unik jangka tur pelipuran di Indonesia.
Setiap tahun, beribu-ribu pengunjung berduyun-duyun mengunjungi praja ini buat menikmati
bermacam-macam lingkungan menarik, mulai gara-gara Candi Borobudur
hingga Malioboro nan legendaris. Bagi Saudara nan merencanakan kepergian ke Jogja bergabung regu, lengah se- saringan pemindahan yang sangat
direkomendasikan yaitu Hiace Premio. Namun, sebelum Dikau memutuskan mendapatkan menyewa,
bermanfaat bakal memaklumi kualitas sewa Hiace Premio di Jogja
per hari supaya bisa mengatur jumlah melalui
baik.
Sewa Hiace Premio di Jogja rata-rata menyandang intermezo nilai bergantung pada sebagian alasan, bak periode, lama
sewa, bersama penyedia layanan rental. Pukul rata, derajat sewa
Hiace Premio di Jogja beralih antara Rp 1.200.000 hingga
Rp 1.800.000 per musim. Arti ini pukul rata sudah tersisip sopir
beserta biaya bukti bakar, walakin bisa bervariasi tergantung kebijakan masing-masing penyedia.
Luput eka segi nan mempengaruhi arti carter yakni masa rekreasi.
Pada saat peak season, kaya saat liburan sekolah maupun musim raya,
faedah sewa menjurus lebih tinggi. Untuk mencermatkan ongkos, ada baiknya Kamu mengarang kunjungan dalam luar tahun puncak.
Akan tetapi, andaikata pelancongan Sira tidak bisa dihindari
pada saat peak season, pastikan perlu menyelenggarakan pemesanan jauh-jauh yaum bagi mengamankan kualitas terbaik.
Berkuasa agak kepada mengenal bahwa ada kurang lebih jatah carter nan ditawarkan. Kurang lebih penyedia
layanan persewaan Hiace Premio kira-kira melamarkan alokasi harian, mingguan,
alias lebih-lebih bulanan. Seumpama Dikau berencana bagi menyewa
dalam batas hidup lama, sepatutnya tanyakan apakah ada korting maupun promo khusus
menjelang kontrak hasrat panjang. Peristiwa ini bisa terlampau menguntungkan,
terutama seandainya Kamu meluluskan perjalanan serempak gabungan besar.
Selain itu, perhatikan lumayan alat yang ditawarkan dalam pangsa sewa.
Umumnya, faedah sewa sudah mencakup sopir nan berpengalaman pula supel, serta asuransi untuk menghadiahkan mencicip aman sewaktu isra.
Tetapi, kaum penyedia mana tahu memohonkan keringanan sematan, semacam tirta pelikan, snack, atau layanan mengiringi jemput pada beserta
ke bandara. Pastikan demi meminta perincian ini biar Tuan mendeteksi gelagat keahlian terbaik
semasa dalam Jogja.
Keberadaan Hiace Premio nan spacious dan sedap terus menjadi pertimbangan apa sebab banyak
orang memilihnya bagai media menjelang perhimpunan. Hiace Premio bisa menampung hingga 14 pendompleng, sehingga cocok bagi pelayaran kerabat,
daftar pejabat, ataupun trip serempak teman-teman. Lubuk kabin nan luas lalu jok
nan empuk hendak membangun kunjungan jauh terasa lebih menyenangkan. Ditambah lagi,
AC nan dingin beserta prosedur audio yang baik menggelar pelayaran semakin sip
serta bebas gara-gara kekesalan.
Kalau Dikau menggeledah rental Hiace Premio di Jogja, ada banyak alternatif yang bisa
Engkau pertimbangkan. Engkau bisa mengagau berita melalui
internet, perangkat sosial, ataupun bertanya pada teman yang pernah bersambang ke Jogja
sebelumnya. Pastikan menjumpai membandingkan segenap penyedia layanan mudah-mudahan bisa membaca guna dengan servis yang bertemu
demi keinginan Engkau.
Unik manual bumbu, non ragu kepada membaca ulasan mengenai pelanggan sebelumnya.
Ini tentu menyodorkan curaian tentang kualitas layanan selanjutnya
kedudukan sarana yang disewakan. Selayaknya pilih
penyedia nan ada nama baik baik lalu mengindra banyak review positif mudah-mudahan pelawatan Tuan lebih lancar lalu
menyenangkan.
Saat memutuskan selama menyewa Hiace Premio, ada sebagian perkara nan perlu
diperhatikan. Terutama, pastikan Sira memahami kepastian sewa, termuat tanda
waktu operasional, anggaran ekstra bila meninggalkan arloji sewa,
lalu politik pemulangan kendaraan. Kedua, pastikan Saudara menghakimi kualifikasi organ sebelum
berangkat. Ihwal ini bermakna menjumpai menandaskan bahwa trompet dalam roman baik dengan aman kepada digunakan.
Setelah mengetahui makna lalu peri-perkara utama akan sewa Hiace Premio di
Jogja, Tuan bisa mulai mempersiapkan itinerary kepergian sama
lebih baik. Cobalah selama mengunjungi bermacam-macam daerah menarik dekat Jogja, mulai daripada lokasi ilmu sejarah sebagai Candi Prambanan hingga bidang kuliner nan legendaris.
Plus trompet nan makmur, Sira dengan legian bisa menjelajahi setiap
penjuru Jogja tanpa repot.
Karena kadar kontrak nan nisbi tercapai, Hiace Premio merundingkan kesehatan bersama kemudahan dalam kepergian.
Malahan andaikan Situ membuat perjalanan dalam gabungan besar,
sewa Hiace Premio menjadi sortiran nan lebih ekonomis dibandingkan membonceng separuh penghubung kecil.
Semua elemen ketumbukan dapat berpergian bersama, berbagi babad, selanjutnya menikmati momen kebersamaan dekat dalam instrumen.
Selaku totalitas, sewa Hiace Premio di Jogja sama dengan sortiran nan super baik sepanjang pengiriman rombongan. Via payu nan bervariasi walakin tetap terjangkau, Tuan bisa merasakan profesionalisme penjelajahan nan sehat lagi menyenangkan. Jadi, misalnya Kamu merencanakan perjalanan ke Jogja, tidak ragu buat mematut-matut kontrak Hiace Premio sebagai jalan keluar
transportasi Anda. Sama perencanaan yang baik,
Dikau akan mengindra pengetahuan pakansi yang tidak terjerahak dekat
metropolitan istimewa ini.
Look into my webpage watch Free poker videos & tv shows
Hi there, its pleasant post concerning media print, we all
know media is a wonderful source of data.
Gay Boys Porn https://gay0day.com HD is the best gay porn tube to watch high definition videos of horny gay boys jerking, sucking their mates and fucking on webcam
Have you ever considered creating an ebook or guest authoring on other blogs?
I have a blog centered on the same ideas you discuss and would love to have you share
some stories/information. I know my readers would
value your work. If you are even remotely interested, feel
free to shoot me an e mail.
Stop by my website — traduzioni di documenti medici
It’s wonderful that you are getting ideas from this paragraph as well as from our dialogue made here.
You’re so awesome! I don’t think I’ve read a single thing like this before.
So great to find somebody with a few unique thoughts on this topic.
Seriously.. many thanks for starting this up.
This web site is something that’s needed on the internet, someone with a little originality!
best csgo gambling sites csgo gambling
csgo gamble csgo gamble
Exceptional post but I was wanting to know if you could write a litte more on this topic?
I’d be very thankful if you could elaborate
a little bit more. Many thanks!
Why visitors still make use of to read news papers when in this technological world
everything is accessible on web?
bs2site
Also visit my page :: free poker
In 2009, a pandemic global outbreak of swine flu H1N1 influenza A was associated with high complication rates in pregnant women and pregnant women are now recommended to have a flu vaccine.
Shop around from home for all the reduced price cialis effects online instead of buying medicine at the pharmacy.
There is typically no cost to you for this analysis and you will not be compensated for returning your implant.
In breastfeeding, milk travels from the milk sinuses through the nipple to the baby.
Getting the real deal at acyclovir online pharmacy in the price chart published on this site
Chemoembolization of the hepatic artery may be used to treat cancer that has spread to the liver.
Researchers are studying whether people with certain risk factors are more likely than others to develop a brain tumor.
Bookmark this portal for buying minocycline pharmacy on account it is modestly-priced and produces exceptional
Testosterone and depression in aging men.
my web-site pokertube — watch free poker videos & tv shows
Oh my goodness! Impressive article dude! Thanks, However I am encountering troubles with your RSS.
I don’t know the reason why I cannot join it. Is there anyone else getting similar RSS problems?
Anybody who knows the solution will you kindly respond? Thanks!!
We appreciate your patience with the translation process.
Using the internet, you can find a https://cilisfastmed.com/ cialis daily side effects are much better deals than in local stores.
Reply Leave a Reply Cancel reply Your email address will not be published.
Also evaluate the remediator’s qualifications and insurance liability as well as workman’s comp.
you get the best price when you https://ivermectinfastmed.com/ buy ivermectin for humans australia will be right online.
However, brain tumour headaches may be described as worse in the morning and then better after a couple of hours.
WOW just what I was looking for. Came here by searching for
تقویم دی ۱۴۰۳
Look at my web page PokerTube — Watch Free Poker Videos & TV Shows
Howdy fantastic website! Does running a blog such as this take a large amount of work?
I have virtually no expertise in computer programming but I
was hoping to start my own blog in the near future.
Anyways, if you have any suggestions or tips for new blog owners please share.
I know this is off subject but I simply wanted to ask.
Kudos!
I feel this is one of the most important info for me.
And i’m glad studying your article. But wanna remark on few common things, The web site taste is perfect, the
articles is truly nice : D. Just right task, cheers
I think the admin of this site is genuinely working hard in favor of his site,
because here every material is quality based material.
whoah this weblog is great i really like studying your articles.
Keep up the great work! You know, many individuals are hunting round for this info, you can aid them greatly.
certainly like your web-site however you have to take a
look at the spelling on quite a few of your posts.
Many of them are rife with spelling problems and I to find it very bothersome to inform
the truth then again I will surely come back again.
These are truly great ideas in about blogging.
You have touched some pleasant points here. Any way keep up wrinting.
csgo gambling sites csgo gamble
sex video
I love your blog.. very nice colors & theme. Did you create this website
yourself or did you hire someone to do it for you?
Plz respond as I’m looking to construct my own blog and would
like to find out where u got this from. cheers
Hi there! I know this is somewhat off topic
but I was wondering if you knew where I could locate a captcha plugin for my comment form?
I’m using the same blog platform as yours and I’m having trouble finding one?
Thanks a lot!
I’ve been surfing on-line greater than 3 hours
lately, yet I never found any interesting article like yours.
It’s beautiful value sufficient for me. In my view, if all
web owners and bloggers made good content as
you did, the net will likely be much more helpful than ever before.
I must thank you for the efforts you’ve put in penning this website.
I’m hoping to see the same high-grade blog posts from you later
on as well. In fact, your creative writing
abilities has encouraged me to get my own, personal site now 😉
Feel free to surf to my homepage — https://torisubeyoshi.hatenablog.com/iframe/hatena_bookmark_comment?canonical_uri=https://www.google.md/Url?q=https://www.pokertube.com/
My website; pokertube — watch free poker videos & tv shows
Thank you for the good writeup. It in fact was a
amusement account it. Look advanced to more added agreeable from you!
By the way, how could we communicate?
hi!,I like your writing very a lot! proportion we keep up a correspondence extra about
your article on AOL? I require a specialist on this
area to unravel my problem. Maybe that is you! Looking forward to
see you.
I think this is one of the most important information for me.
And i’m glad reading your article. But want to remark on few general things, The web site style is ideal,
the articles is really great : D. Good job, cheers
Hi there! I know this is kinda off topic but I was wondering if you
knew where I could locate a captcha plugin for my comment form?
I’m using the same blog platform as yours and I’m having trouble finding one?
Thanks a lot!
bs2site
Wow, incredible weblog layout! How lengthy have you been running a blog for?
you make blogging glance easy. The overall glance of your site is fantastic, let alone the content material!
We absolutely love your blog and find nearly all of your post’s to be exactly
I’m looking for. Would you offer guest writers to write content available for you?
I wouldn’t mind creating a post or elaborating
on many of the subjects you write about here. Again, awesome weblog!
Wonderful goods from you, man. I’ve understand your stuff previous to and you are just too magnificent.
I really like what you’ve acquired here, certainly like
what you are stating and the way in which you say it. You make it
entertaining and you still take care of to keep it wise.
I cant wait to read far more from you. This is actually a
terrific website.
музей анимации московский музей анимации москва
The Bet9ja platform has become a leading online betting site in Nigeria.
Providing a diverse selection of sports betting options,
this platform delivers an engaging experience for bettors.
A major draw of Bet9ja is its enticing initial promotion. Fresh registrants can use
the Bet9ja promo code while creating an account to unlock a significant bonus on their first deposit.
This promotional offer enables players to increase their betting
power right from the start.
To get started, the Bet9ja registration process
is user-friendly. Navigate to the official Bet9ja platform and complete the required fields.
Remember to input the valid Bet9ja bonus code to claim your
welcome bonus.
Once registered, Bet9ja users can enjoy a range of options.
The sports betting section covers popular leagues like the Premier
League, as well as diverse sporting events.
To cater to different preferences, the online casino offerings provides a range of games.
With various casino classics, there’s an option to suit all tastes.
The platform also provides multiple bonuses, including the
sought-after multiple boost. This feature amplifies the prospective returns on combination stakes, boosting the appeal for
experienced gamblers.
For those on the go can use the Bet9ja mobile app, ensuring gambling access are readily available.
The app offers a smooth operation, permitting users
to place bets with convenience.
Should you need assistance, the support staff is ready
to help. Reach out for help through different means, ensuring prompt resolution for any
concerns.
Remember that while bonuses are attractive, responsible
gambling should remain paramount. The platform encourages safe betting practices and provides tools to assist in controlling their
gambling habits.
In summary, Bet9ja stands out in the West African gambling landscape.
With its user-friendly interface, enticing offers, and wide range of betting options, it’s clear why this sportsbook has emerged as a preferred option among sports enthusiasts.
If you’re an experienced bettor, this site delivers an engaging betting experience that keeps users coming back.
I am truly delighted to glance at this web
site posts which consists of lots of helpful data,
thanks for providing such information.
Here is my web site :: Watch Free Poker Videos & TV Shows
I every time used to read paragraph in news papers but now
as I am a user of internet so from now I am using net for posts, thanks to web.
It’s going to be finish of mine day, however before end I am
reading this fantastic post to increase my experience.
Loved this article! This topic really resonates with me.
I appreciate the insights you provided. Your analysis is spot on, Thanks for shedding light on this issue; It’s interesting to see how different perspectives can shape our understanding.
I’ll definitely share this with my friends! Overall, I think this
topic is crucial for our community, and discussions like this help us grow and learn together.
I look forward to more posts like this in the future.
my webpage: Press Releases Chicago
I blog frequently and I genuinely thank you for your content.
This article has really peaked my interest. I’m going to take a note of your website and keep checking
for new details about once per week. I opted in for your RSS feed too.
Admiring the time and energy you put into your site and in depth information you present.
It’s good to come across a blog every once in a while that isn’t
the same unwanted rehashed information. Fantastic read! I’ve bookmarked your site
and I’m including your RSS feeds to my Google account.
Have you ever considered about including a little bit more
than just your articles? I mean, what you say is fundamental
and all. However imagine if you added some great images or videos to
give your posts more, «pop»! Your content is excellent but with pics and videos, this blog could definitely be
one of the most beneficial in its niche. Very good blog!
We are a bunch of volunteers and opening a brand new scheme
in our community. Your web site provided us with useful info to
work on. You’ve performed an impressive process and our whole group can be
thankful to you.
resume of a chief engineer https://engineer-builder-resume.com
What’s up to every body, it’s my first go to see of this weblog; this website consists of amazing and truly
good information for visitors.
It’s truly very complicated in this busy life to listen news on TV, thus
I only use world wide web for that purpose, and obtain the
most up-to-date news.
WOW just what I was searching for. Came here by searching for حذف اکانت اینستاگرام
temporarily disable my account
Hi there! This post couldn’t be written any better! Reading through
this post reminds me of my old room mate! He always kept chatting about this.
I will forward this page to him. Fairly certain he will have a good read.
Many thanks for sharing!
Sweet blog! I found it while searching on Yahoo News.
Do you have any suggestions on how to get listed in Yahoo News?
I’ve been trying for a while but I never seem to get there!
Appreciate it
I’m not sure why but this web site is loading incredibly slow for me.
Is anyone else having this issue or is it a issue on my end?
I’ll check back later and see if the problem still exists.
Букмекерская контора 1хбет предлагает вам уникальные условия для ставок на спорт. Надежность платформы и высокая скорость выплат делают её одной из самых популярных среди пользователей.
Also visit my blog post :: PokerTube — Watch Free Poker Videos & TV Shows
I enjoy reading an article that can make men and
women think. Also, thanks for permitting me to comment!
Hi mates, its wonderful paragraph on the topic of cultureand fully defined, keep it up all the time.
At this time it appears like Expression Engine is the preferred
blogging platform available right now. (from what I’ve read) Is that
what you’re using on your blog?
Thanks a lot for sharing this with all folks you actually understand what you’re
speaking about! Bookmarked. Kindly also discuss with my website =).
We could have a hyperlink trade agreement between us
Hi it’s me, I am also visiting this site daily, this web page
is actually nice and the viewers are in fact sharing pleasant thoughts.
My brother recommended I would possibly like this website.
He was totally right. This post truly made my day. You
can not imagine just how much time I had spent for this information! Thanks!
Wow that was strange. I just wrote an really long comment but after I clicked submit my comment didn’t
show up. Grrrr… well I’m not writing all that over again. Anyways, just wanted to say wonderful blog!
Wonderful beat ! I wish to apprentice at the same time as you amend
your site, how can i subscribe for a weblog web site?
The account helped me a acceptable deal. I had been tiny bit familiar of this your broadcast provided shiny clear idea
I am sure this piece of writing has touched all the internet users, its really really pleasant
paragraph on building up new blog.
I think this is one of the so much vital info for me. And i’m glad reading your article.
However should observation on some normal things, The web site taste is wonderful, the articles is really nice :
D. Excellent process, cheers
This post will help the internet visitors for building up new website or even a blog from start to end.
Post writing is also a fun, if you be acquainted with afterward you can write otherwise it is
complex to write.
Do you have a spam problem on this site; I
also am a blogger, and I was wanting to know your
situation; many of us have created some nice procedures and we are looking to trade solutions with other folks, why not shoot me an e-mail if interested.
Look at my website Play poker Online
ТехЭлектро — ваш надежный поставщик электротехники. Предлагаем широкий ассортимент кабелей, светильников и систем для любых задач. Доставка в кратчайшие сроки по всей стране.
I used to be recommended this blog by means of my cousin. I’m
no longer sure whether or not this put up is written by
him as no one else know such certain approximately my problem.
You’re incredible! Thanks!
Wonderful post! We will be linking to this great post on our site.
Keep up the good writing.
My programmer is trying to persuade me to move to .net from PHP.
I have always disliked the idea because of the expenses.
But he’s tryiong none the less. I’ve been using WordPress
on a number of websites for about a year and am concerned about
switching to another platform. I have heard good things about blogengine.net.
Is there a way I can transfer all my wordpress content into it?
Any kind of help would be really appreciated!
Amazing! This blog looks exactly like my old one! It’s on a entirely
different topic but it has pretty much the same page layout and design. Outstanding choice of colors!
First off I want to say wonderful blog! I had a quick question in which I’d like to ask
if you don’t mind. I was interested to find out how you center yourself and clear your head prior to
writing. I have had a tough time clearing my thoughts in getting my thoughts out.
I do take pleasure in writing however it just seems like the first 10 to 15 minutes are usually wasted
simply just trying to figure out how to begin. Any suggestions or hints?
Appreciate it!
Have you ever thought about writing an e-book or guest authoring on other sites?
I have a blog based upon on the same topics you discuss and would love to have you
share some stories/information. I know my readers would value your work.
If you are even remotely interested, feel free to send me an e-mail.
When someone writes an paragraph he/she maintains the image of a user
in his/her mind that how a user can know it. So that’s why this
piece of writing is perfect. Thanks!
Remarkable things here. I’m very glad to see your post.
Thank you a lot and I am looking forward to touch you. Will you kindly drop
me a e-mail?
I’ve been browsing online more than three hours
nowadays, yet I by no means discovered any attention-grabbing article like
yours. It is lovely worth sufficient for me. Personally, if all web owners and bloggers made excellent content
material as you probably did, the internet can be much more helpful
than ever before.
Fantastic article! Press statements are key for crafting media narratives and conveying significant updates.
They aid establish connections between organizations
and journalists. Developing successful press releases requires being direct, matched with the interests of targeted news channels.
Given digital advancements, press releases also play a important role in digital outreach.
They not just reach conventional news outlets but likewise
drive engagement and improve a organization’s internet visibility.
Integrating visuals, such as graphics, can turn press releases further appealing and distributable.
Evolving to the dynamic media sphere while keeping core standards can substantially increase a press release’s reach.
What’s your take on incorporating multimedia in public announcements?
my web-site Pressez (Audrea)
Узаконивание перепланировки — важный шаг для тех, кто хочет быть уверенным в законности своих изменений. Мы знаем, как сделать этот процесс максимально быстрым и безболезненным. Обращайтесь к нам, и мы поможем вам узаконить перепланировку без лишней бюрократии и стресса.
What’s Happening i am new to this, I stumbled upon this I have found It absolutely helpful and it has aided me out loads.
I am hoping to contribute & assist other customers like its aided me.
Good job.
I was wondering if you ever considered changing the layout of your site?
Its very well written; I love what youve got to say.
But maybe you could a little more in the way of content so people could connect with it
better. Youve got an awful lot of text for only having one or 2 images.
Maybe you could space it out better?
Thanks a lot for sharing this with all of us you really recognize what you’re speaking approximately!
Bookmarked. Kindly additionally seek advice from my website =).
We will have a hyperlink trade agreement between us
Excellent blog! Do you have any recommendations for
aspiring writers? I’m hoping to start my own blog soon but I’m
a little lost on everything. Would you recommend starting with a free platform like WordPress
or go for a paid option? There are so many options
out there that I’m completely overwhelmed .. Any suggestions?
Kudos!
My web-site … PokerVIP — Online Poker Strategy, Tips, Rakeback and Bonuses
Новости Астана kazlenta.kz
Интересные гороскоп на 2021 Дева уже на нашем сайте. Мы ежедневно добавляем информацию об эпизодах, стараясь контролировать её верность. Все главные события в сфере автомобилистики, новости, дтп, общество. Обязательно сохраните наш узнаваемый интернет ресурс и отправляйте знакомым. Только здесь все верные и вовремя отправленные новости о Казахстане.
Hello just wanted to give you a quick heads up. The words
in your content seem to be running off the screen in Firefox.
I’m not sure if this is a format issue or something to
do with web browser compatibility but I figured I’d
post to let you know. The design look great though! Hope you get the issue fixed soon. Kudos
Узнайте цены на гусеничные экскаваторы на сайте ООО «СТМБ» и подберите подходящую модель для вашего бизнеса. Мы предлагаем широкий выбор экскаваторов по доступным ценам с гибкими условиями покупки. В нашем каталоге представлена техника мировых брендов, которая сочетает в себе высокую производительность и долговечность.
Hello my loved one! I want to say that this article is amazing, great
written and include approximately all important infos.
I’d like to see more posts like this .
Hello would you mind letting me know which web host you’re using?
I’ve loaded your blog in 3 different web browsers and I must say this blog loads a lot faster then most.
Can you suggest a good hosting provider at a reasonable
price? Thanks a lot, I appreciate it!
Excellent article! We are linking to this great content
on our website. Keep up the great writing.
I really like what you guys are up too. This type of clever work and reporting!
Keep up the fantastic works guys I’ve added you guys to my
own blogroll.
I’m not sure exactly why but this site is loading incredibly slow for me.
Is anyone else having this problem or is it a problem on my end?
I’ll check back later on and see if the problem still exists.
I always spent my half an hour to read this web site’s posts daily along with a mug of coffee.
Oh my goodness! Impressive article dude! Many thanks, However I am going through
difficulties with your RSS. I don’t know why I cannot subscribe
to it. Is there anybody getting the same RSS issues?
Anyone that knows the answer can you kindly respond?
Thanks!!
my website; High stakes poker
This blog is super insightful. I really liked the in-depth analysis you gave.
It’s evident that you put a lot of time into crafting this.
Keep up the great work. Thanks for sharing. I’ll surely come
back to read more!
Feel free to surf to my web-site — Press release (https://minecraftcommand.science/)
Heya i’m for the first time here. I came across this
board and I find It really useful & it helped me out much.
I hope to give something back and aid others
like you aided me.
Hmm it appears like your site ate my first comment (it was super
long) so I guess I’ll just sum it up what I had written and say, I’m thoroughly
enjoying your blog. I too am an aspiring blog blogger but I’m still new to the whole thing.
Do you have any tips and hints for inexperienced blog writers?
I’d genuinely appreciate it.
Hi there! I know this is sort of off-topic however I had to ask.
Does operating a well-established website such as yours take a large amount of work?
I’m brand new to blogging however I do write in my
diary every day. I’d like to start a blog so I can share my own experience
and thoughts online. Please let me know if you have any ideas or tips for brand new aspiring bloggers.
Appreciate it!
I enjoy what you guys tend to be up too. This kind of clever work and reporting!
Keep up the excellent works guys I’ve added you guys to my own blogroll.
I like what you guys are up too. Such clever work
and reporting! Keep up the good works guys I’ve included you guys to my own blogroll.
You’re so cool! I don’t suppose I’ve truly read something like that before.
So wonderful to discover another person with some original thoughts on this subject.
Seriously.. many thanks for starting this up. This website is something that is
needed on the internet, someone with a bit of originality!
Hello everyone, it’s my first pay a visit at this web page, and piece of writing is in fact fruitful designed for me, keep up posting
these articles.
Greate article. Keep writing such kind of information on your blog.
Im really impressed by your site.
Hello there, You’ve done a fantastic job. I’ll certainly digg
it and for my part suggest to my friends. I’m sure they will be benefited from this web site.
Greate pieces. Keep posting such kind of info on your
page. Im really impressed by your blog.
Hello there, You have done a fantastic job. I’ll certainly
digg it and individually recommend to my friends. I’m sure
they’ll be benefited from this site.
Heya! I’m at work browsing your blog from my new iphone 4!
Just wanted to say I love reading your blog and look forward to all your posts!
Carry on the superb work!
Its such as you read my mind! You appear to know so much approximately
this, like you wrote the book in it or something. I think
that you simply can do with a few percent to pressure the message house a little bit,
however other than that, that is great blog. A fantastic read.
I will definitely be back.
I am not sure where you’re getting your information, but good topic.
I needs to spend some time learning much more or understanding more.
Thanks for great info I was looking for this information for
my mission.
It’s remarkable to visit this website and reading the views
of all mates concerning this piece of writing, while
I am also eager of getting familiarity.
Профессиональный сервисный центр по ремонту компьютерных видеокарт по Москве.
Мы предлагаем: ремонт видеокарт gigabyte в москве
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Way cool! Some extremely valid points! I appreciate you writing this post and the rest of the website is also really good.
Профессиональный сервисный центр по ремонту телефонов в Москве.
Мы предлагаем: ремонтная мастерская телефонов
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Hi there! I know this is kinda off topic however I’d figured I’d ask.
Would you be interested in exchanging links or maybe guest authoring a blog post or
vice-versa? My blog discusses a lot of the same topics as yours and I think we could
greatly benefit from each other. If you happen to be interested feel free to shoot me an e-mail.
I look forward to hearing from you! Wonderful blog by the way!
можно купить кокаин порно русские лесбиянки
Профессиональный сервисный центр по ремонту телефонов в Москве.
Мы предлагаем: мастер по ремонту телефонов
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Получите бонусы, используя реферальный код Bitget. Узнайте на invest-top.net, как максимально эффективно начать свой путь в трейдинге.
Wonderful, what a website it is! This web site gives useful facts to us, keep it up.
Good day I am so delighted I found your site, I really found you by accident,
while I was looking on Yahoo for something else, Nonetheless I am here
now and would just like to say thanks for a remarkable post and a all round enjoyable blog (I also love the theme/design), I don’t have time to read through it all at the minute but I have bookmarked it and also added your RSS feeds,
so when I have time I will be back to read a lot more, Please do keep up the
great work.
Hello friends, its wonderful paragraph concerning educationand fully explained, keep it up
all the time.
Great beat ! I wish to apprentice while you amend your web site,
how can i subscribe for a blog web site? The account helped me a acceptable deal.
I had been a little bit acquainted of this your broadcast offered bright clear concept
Hello, I desire to subscribe for this website to take most up-to-date updates, so where can i do it please help.
Hi! I simply want to give you a big thumbs up for your great
information you have got right here on this post. I am coming back to your
website for more soon.
I think the admin of this site is actually working hard for his web site, since here every data is quality based
information.
I am in fact delighted to read this web site posts which contains tons of useful facts, thanks for providing such data.
My partner and I stumbled over here by a different website
and thought I may as well check things out. I like what I see
so i am just following you. Look forward to looking at your web page for a
second time.
реклама в лифтах жилых домов реклама в лифтах в москве
Pretty! This was a really wonderful article.
Thank you for supplying this info.
Simply want to say your article is as astonishing. The clarity on your
put up is simply nice and that i could suppose you’re knowledgeable on this subject.
Well with your permission allow me to take hold
of your RSS feed to stay updated with approaching post.
Thanks a million and please keep up the gratifying work.
I know this site provides quality based posts and other
data, is there any other site which gives these information in quality?
I’m really enjoying the theme/design of your weblog.
Do you ever run into any browser compatibility issues? A small number of my blog readers have
complained about my site not working correctly in Explorer but looks
great in Safari. Do you have any recommendations to help fix this issue?
After I originally commented I seem to have clicked on the -Notify me when new
comments are added- checkbox and now each time a comment is added I get four emails
with the exact same comment. There has to be an easy method you are able to
remove me from that service? Thanks a lot!
Hello there! Would you mind if I share your blog with my twitter group?
There’s a lot of people that I think would really enjoy your content.
Please let me know. Cheers
Every weekend i used to pay a quick visit this web site, for the reason that i wish for enjoyment, for the reason that this
this website conations truly pleasant funny
information too.
I have been browsing on-line more than 3 hours lately, yet I
never discovered any interesting article like yours.
It is beautiful worth sufficient for me. In my opinion, if all website owners and bloggers made excellent content as you did, the net can be much more
helpful than ever before.
Marvelous, what a weblog it is! This weblog provides useful data to us,
keep it up.
It’s very simple to find out any topic on net as compared to textbooks, as I
found this article at this web site.
Excellent goods from you, man. I have understand your stuff previous
to and you’re just extremely great. I really like what you’ve acquired here, certainly like what you’re stating and the way in which you say it.
You make it entertaining and you still care for to keep it wise.
I can’t wait to read far more from you. This is actually a tremendous site.
I am really impressed together with your writing abilities as smartly as with the layout in your blog.
Is this a paid subject or did you modify
it yourself? Anyway keep up the nice high
quality writing, it’s uncommon to look a great weblog like this one today..
Thank you for sharing your thoughts. I truly appreciate your efforts and
I will be waiting for your further post thank you once again.
We absolutely love your blog and find a lot of your post’s to be
just what I’m looking for. Do you offer guest writers to write content in your case?
I wouldn’t mind composing a post or elaborating on some of the subjects you write related to here.
Again, awesome site!
I have fun with, lead to I discovered exactly what I
was looking for. You have ended my 4 day long hunt! God Bless you man. Have a nice day.
Bye
If some one desires to be updated with latest technologies after that he
must be go to see this web site and be up to date all the time.
I am regular reader, how are you everybody?
This piece of writing posted at this web page is actually pleasant.
Have you ever thought about including a little
bit more than just your articles? I mean, what you say is important
and all. Nevertheless just imagine if you added some great visuals or videos to give your posts
more, «pop»! Your content is excellent but with pics and videos, this site could undeniably be one of the most beneficial in its niche.
Wonderful blog!
If you want to obtain a good deal from this piece of writing then you have to apply these strategies
to your won weblog.
This is a topic which is close to my heart… Thank you! Where are your contact details
though?
These are actually enormous ideas in about blogging. You have touched some
fastidious points here. Any way keep up wrinting.
This site really has all the information and facts I wanted about this subject and didn’t know who to ask.
This piece of writing presents clear idea in favor of the new users of blogging, that genuinely how
to do blogging and site-building.
Thank you for some other wonderful post. The place else may anybody
get that type of info in such a perfect way of writing?
I have a presentation next week, and I am at the look for such information.
Hey There. I discovered your weblog the use of msn. This is a very smartly
written article. I’ll be sure to bookmark it and
return to learn extra of your useful info. Thanks for the post.
I will definitely comeback.
Just wish to say your article is as astonishing.
The clearness in your post is simply nice and i can assume you are an expert on this
subject. Fine with your permission allow me to grab your RSS feed to keep
updated with forthcoming post. Thanks a million and please continue the gratifying work.
Thanks , I have recently been searching for info about this subject for ages and yours is the
greatest I have discovered till now. However, what about the conclusion? Are
you positive about the supply?
Thanks for your marvelous posting! I definitely enjoyed reading it, you’re a great author.I will always
bookmark your blog and will often come back sometime soon. I want to
encourage yourself to continue your great job, have a nice
holiday weekend!
Wow, awesome blog layout! How long have you been blogging
for? you made blogging look easy. The overall look of your web site is magnificent, as well
as the content!
WOW just what I was looking for. Came here by searching for هزینه عمل لیزیک با بیمه تکمیلی دانا
Good day I am so delighted I found your website, I really
found you by error, while I was looking on Aol for something
else, Nonetheless I am here now and would just like to say thanks for a marvelous post and a
all round exciting blog (I also love the theme/design),
I don’t have time to look over it all at the moment but I have saved it and also included your RSS feeds, so when I have time I will be back to
read more, Please do keep up the awesome work.
Hey there! I’ve been reading your web site for a while now and finally
got the bravery to go ahead and give you a shout out from Austin Tx!
Just wanted to tell you keep up the good job!
What’s up to all, it’s actually a fastidious
for me to pay a visit this web page, it includes priceless
Information.
Great blog here! Also your website loads up fast! What web
host are you using? Can I get your affiliate link to your host?
I wish my site loaded up as fast as yours lol
Ridiculous quest there. What happened after? Good luck!
My brother recommended I might like this web site.
He was once entirely right. This submit truly made my day.
You cann’t imagine just how a lot time I had spent for this info!
Thanks!
Hmm is anyone else encountering problems with the images on this blog
loading? I’m trying to determine if its a problem on my end or
if it’s the blog. Any feed-back would be greatly appreciated.
Hey there! This is kind of off topic but I need some help from an established
blog. Is it very difficult to set up your own blog?
I’m not very techincal but I can figure things
out pretty quick. I’m thinking about making
my own but I’m not sure where to begin. Do you have any ideas or suggestions?
Appreciate it
Ahaa, its pleasant discussion about this piece of
writing here at this blog, I have read all that, so at this time me also commenting at
this place.
Unquestionably believe that which you stated.
Your favorite justification appeared to be
on the net the simplest thing to be aware of.
I say to you, I certainly get irked while people think about worries that they plainly don’t know about.
You managed to hit the nail upon the top and also defined out the whole thing without having side effect ,
people can take a signal. Will probably be back to get more.
Thanks
Thank you, I’ve just been searching for info approximately
this subject for ages and yours is the best I have found out till now.
But, what in regards to the bottom line? Are you
sure concerning the supply?
Hello it’s me, I am also visiting this web page regularly, this site is actually nice and
the viewers are truly sharing fastidious thoughts.
Hello to every , for the reason that I am truly keen of reading this
website’s post to be updated on a regular basis.
It contains nice data.
Great website. A lot of useful info here. I am
sending it to a few friends ans also sharing in delicious.
And obviously, thanks in your sweat!
If you desire to improve your familiarity
only keep visiting this web page and be updated with the hottest information posted here.
Very good information. Lucky me I recently found your
blog by accident (stumbleupon). I’ve saved as a favorite for later!
Way cool! Some extremely valid points! I
appreciate you writing this article plus the rest of the website is really good.
Incredible! This blog looks just like my old one!
It’s on a completely different subject but it has
pretty much the same page layout and design. Great choice of colors!
Hi! Do you know if they make any plugins to assist with
SEO? I’m trying to get my blog to rank for some targeted keywords but I’m
not seeing very good gains. If you know of any please share.
Thanks!
Hello everyone, it’s my first pay a visit at this web page,
and paragraph is truly fruitful in support of me, keep
up posting these articles.
I like the valuable information you provide in your articles.
I will bookmark your weblog and check again here frequently.
I’m quite sure I’ll learn plenty of new stuff right here! Best of
luck for the next!
Hello, after reading this amazing paragraph i am too happy to share my familiarity here with mates.
Pretty section of content. I just stumbled upon your website and in accession capital to assert that I
acquire actually enjoyed account your blog posts. Anyway I’ll be subscribing to your feeds and even I
achievement you access consistently rapidly.
Write more, thats all I have to say. Literally, it seems as though you relied
on the video to make your point. You clearly know what youre talking about, why throw
away your intelligence on just posting videos to your site when you could be giving us something
enlightening to read?
Excellent blog here! Also your website loads up
fast! What web host are you using? Can I get your affiliate link to your host?
I wish my website loaded up as quickly as yours lol
Have a look at my webpage :: Sibyl
Do not pharmacy checker for an extended period?Check online to find the best place to
It is so helpful being able to communicate with someone who understandsAnd thank you for your kind words about the site.
Hi to every one, the contents existing at this website are genuinely amazing for people
knowledge, well, keep up the nice work fellows.
Hello to all, it’s actually a nice for me to pay a visit this
website, it contains important Information.
These are truly wonderful ideas in concerning blogging.
You have touched some pleasant points here.
Any way keep up wrinting.
Wonderful blog! I found it while searching on Yahoo News.
Do you have any suggestions on how to get
listed in Yahoo News? I’ve been trying for a while but I never
seem to get there! Thanks
These are actually impressive ideas in concerning blogging.
You have touched some good points here. Any way keep up
wrinting.
If money is tight, buy your target pharmacy phentermine delivered right to your door with no hassles. Order Online!
Because of my absolute misery at age seven my mother was desperate for help to figure out why I continued to tell her every day there was something wrong with my body and brain.
We are a gaggle of volunteers and opening a brand new scheme in our community.
Your website offered us with helpful information to work on. You’ve performed
an impressive activity and our entire neighborhood will probably be grateful to you.
If some one wishes to be updated with most recent technologies after that he must be pay a visit this web site
and be up to date all the time.
Hi there, its good article on the topic of media print, we all
be aware of media is a enormous source of facts.
Hello very nice blog!! Guy .. Beautiful .. Amazing ..
I will bookmark your web site and take the feeds also?
I’m happy to seek out so many useful info here in the put up, we need develop extra strategies in this regard, thanks
for sharing. . . . . .
If some one needs expert view about blogging then i propose him/her to pay a quick visit this website,
Keep up the pleasant work.
I used to be recommended this blog via my cousin. I’m now not certain whether or not this submit is
written through him as no one else understand such specified approximately my
problem. You are incredible! Thank you!
It’s really a cool and useful piece of info. I am glad that you just shared this useful info with us.
Please keep us up to date like this. Thank you for sharing.
I always used to read paragraph in news papers but now as I
am a user of web so from now I am using net for articles, thanks to web.
Временная регистрация в Москве: Быстро и Легально!
Ищете, где оформить временную регистрацию в Москве?
Мы гарантируем быстрое и легальное оформление без очередей и лишних документов.
Ваше спокойствие – наша забота!
Минимум усилий • Максимум удобства • Полная легальность
Свяжитесь с нами прямо сейчас!
Временная регистрация в Москве
Also visit my blog post — Stakes Casino
Hi, Neat post. There’s an issue together with your site in internet explorer, could check this?
IE nonetheless is the marketplace chief and a large component to folks
will pass over your fantastic writing due to this problem.
Hello, I enjoy reading all of your article
post. I wanted to write a little comment to support you.
Hurrah! Finally I got a webpage from where I can genuinely obtain useful facts concerning my study
and knowledge.
Have you ever considered creating an e-book or guest authoring on other
sites? I have a blog based on the same ideas you
discuss and would really like to have you share some stories/information.
I know my visitors would appreciate your work. If you’re even remotely interested, feel free to send me an email.
Thanks for finally talking about > Урок 1. Управление I/O.
Кнопка/светодиод — MicroPi < Liked it!
Hi there, every time i used to check web site posts here in the early hours in the daylight, for the reason that i
enjoy to find out more and more.
Way cool! Some extremely valid points! I appreciate you writing this article and the rest of the site is really good.
Great weblog right here! Additionally your site lots up fast!
What web host are you using? Can I get your affiliate hyperlink for your host?
I want my web site loaded up as fast as yours lol
Howdy! Would you mind if I share your blog with my myspace group?
There’s a lot of people that I think would really enjoy your
content. Please let me know. Many thanks
I know this website presents quality dependent articles
and additional stuff, is there any other web page which gives such
data in quality?
Its like you read my mind! You seem to know so much about this, like you wrote the book in it or
something. I think that you can do with a few
pics to drive the message home a bit, but instead of that, this is fantastic blog.
An excellent read. I’ll definitely be back.
I’ve been browsing online more than 2 hours today,
yet I never found any interesting article like yours.
It is pretty worth enough for me. Personally, if all website owners and bloggers made good content as you did, the web will be much more
useful than ever before.
Can I simply just say what a comfort to discover someone that truly knows what they’re talking about over the internet.
You definitely realize how to bring an issue to light and make it important.
More and more people should check this out and understand this side of your
story. I was surprised that you are not more popular given that
you most certainly possess the gift.
What’s Happening i’m new to this, I stumbled upon this I’ve discovered It positively
helpful and it has helped me out loads. I hope to give
a contribution & assist different users like
its helped me. Good job.
Профессиональный сервисный центр по ремонту Apple iPhone в Москве.
Мы предлагаем: ремонт iphone в москве
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Hi there! I know this is kinda off topic however I’d figured I’d ask.
Would you be interested in exchanging links or maybe guest writing a blog post or vice-versa?
My website addresses a lot of the same topics as yours and I believe we could greatly benefit from each other.
If you’re interested feel free to shoot me an email.
I look forward to hearing from you! Terrific blog by the
way!
I was wondering if you ever considered changing the structure of
your website? Its very well written; I love what youve got to say.
But maybe you could a little more in the way of content so
people could connect with it better. Youve got an awful lot of text
for only having 1 or two images. Maybe you could space it out better?
Hello there! Quick question that’s entirely off topic. Do
you know how to make your site mobile friendly?
My web site looks weird when viewing from my iphone4.
I’m trying to find a template or plugin that might be able to resolve this problem.
If you have any recommendations, please share.
Appreciate it!
I do not even know how I ended up right here, but I assumed this post was once
good. I don’t recognize who you’re but certainly you are going to a well-known blogger for those who
aren’t already. Cheers!
Hello my friend! I want to say that this post is amazing, great written and include almost all vital infos.
I would like to peer extra posts like this .
With havin so much content and articles do you ever run into any issues of plagorism or copyright violation? My site has a lot of unique content I’ve either created myself or outsourced but it looks like a lot of
it is popping it up all over the internet without my authorization.
Do you know any ways to help reduce content from being stolen? I’d really appreciate it.
I’ve read some excellent stuff here. Certainly value bookmarking for revisiting.
I wonder how much effort you place to make such a wonderful informative web site.
Have you ever considered creating an ebook or guest authoring on other blogs?
I have a blog centered on the same information you discuss and
would really like to have you share some stories/information. I know my visitors would appreciate your work.
If you’re even remotely interested, feel free to shoot me
an e mail.
I’ll right away grab your rss feed as I can not in finding
your e-mail subscription link or newsletter service.
Do you have any? Please permit me recognize in order that I could subscribe.
Thanks.
I’m now not certain where you are getting your info, however great topic.
I needs to spend a while learning much more or working out more.
Thank you for great info I used to be on the lookout for this information for
my mission.
Woah! I’m really enjoying the template/theme of this blog.
It’s simple, yet effective. A lot of times it’s challenging to get that «perfect balance» between user friendliness and visual
appeal. I must say you have done a fantastic job with this.
Also, the blog loads super quick for me on Internet explorer.
Exceptional Blog!
купить бытовки мобильные купить бытовку на заказ
I’m really impressed with your writing skills and also with the layout on your weblog.
Is this a paid theme or did you customize it yourself? Anyway keep up the nice quality writing,
it’s rare to see a nice blog like this one nowadays.
Hi there to every single one, it’s really a nice
for me to visit this web page, it consists of important Information.
I’m really enjoying the design and layout of your
site. It’s a very easy on the eyes which makes it much more pleasant
for me to come here and visit more often. Did you hire
out a developer to create your theme? Superb work!
Hi friends, pleasant paragraph and fastidious arguments commented here, I am really enjoying by these.
Nice post. I was checking constantly this blog and I am inspired!
Very helpful info particularly the closing phase 🙂 I take care
of such information much. I was seeking this certain information for a long time.
Thank you and good luck.
Hi there this is kind of of off topic but I was wondering if blogs use WYSIWYG editors or if
you have to manually code with HTML. I’m starting a
blog soon but have no coding know-how so I wanted to get guidance from someone
with experience. Any help would be greatly appreciated!
Hi there to every body, it’s my first pay a
visit of this blog; this blog consists of awesome and truly excellent data in support of readers.
Thanks for sharing your thoughts about کافه با موزیک زنده در تهران.
Regards
I like the valuable info you provide to your articles.
I’ll bookmark your blog and check once more here regularly.
I am rather certain I’ll be informed a lot of new stuff right
here! Good luck for the following!
Heya! I’m at work surfing around your blog from my new apple iphone!
Just wanted to say I love reading your blog and look forward to all
your posts! Keep up the superb work!
I must thank you for the efforts you’ve put in penning
this blog. I really hope to check out the same
high-grade content by you in the future as well. In truth, your creative writing abilities has encouraged me to get
my very own blog now 😉
Hi there! This post couldn’t be written any better! Going through this post reminds me of
my previous roommate! He constantly kept preaching about this.
I’ll send this post to him. Fairly certain he’ll have a very good read.
Many thanks for sharing!
Spot on with this write-up, I honestly believe this site needs
far more attention. I’ll probably be returning to read through more,
thanks for the info!
Hi my family member! I want to say that this article is amazing, nice written and include almost all
significant infos. I would like tto peer more posts like thos .
Here is my weeb page: Shay
Ahaa, its pleasant dialogue about this piece of writing at
this place at this webpage, I have read all that, so at this time me also commenting at this place.
Greetings! Very useful advice within this post!
It is the little changes that produce the most important changes.
Thanks for sharing!
Awesome issues here. I am very happy to peer your article.
Thanks a lot and I am having a look forward to touch you.
Will you kindly drop me a e-mail?