 BME280 представляет собой интегрированный датчик окружающей среды, разработанный специально для мобильных устройств, где размер и низкое энергопотребление являются ключевыми.
BME280 представляет собой интегрированный датчик окружающей среды, разработанный специально для мобильных устройств, где размер и низкое энергопотребление являются ключевыми.
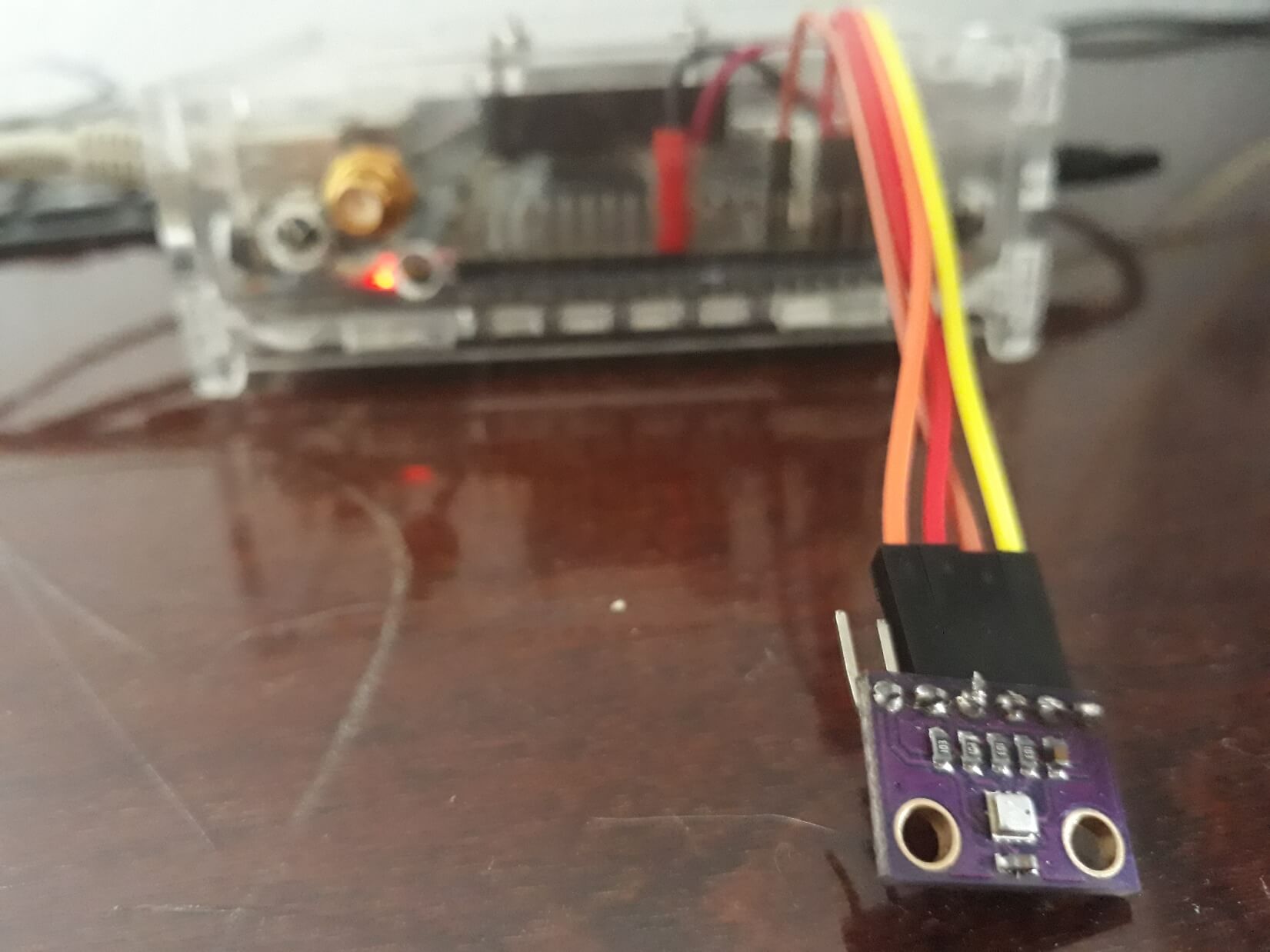
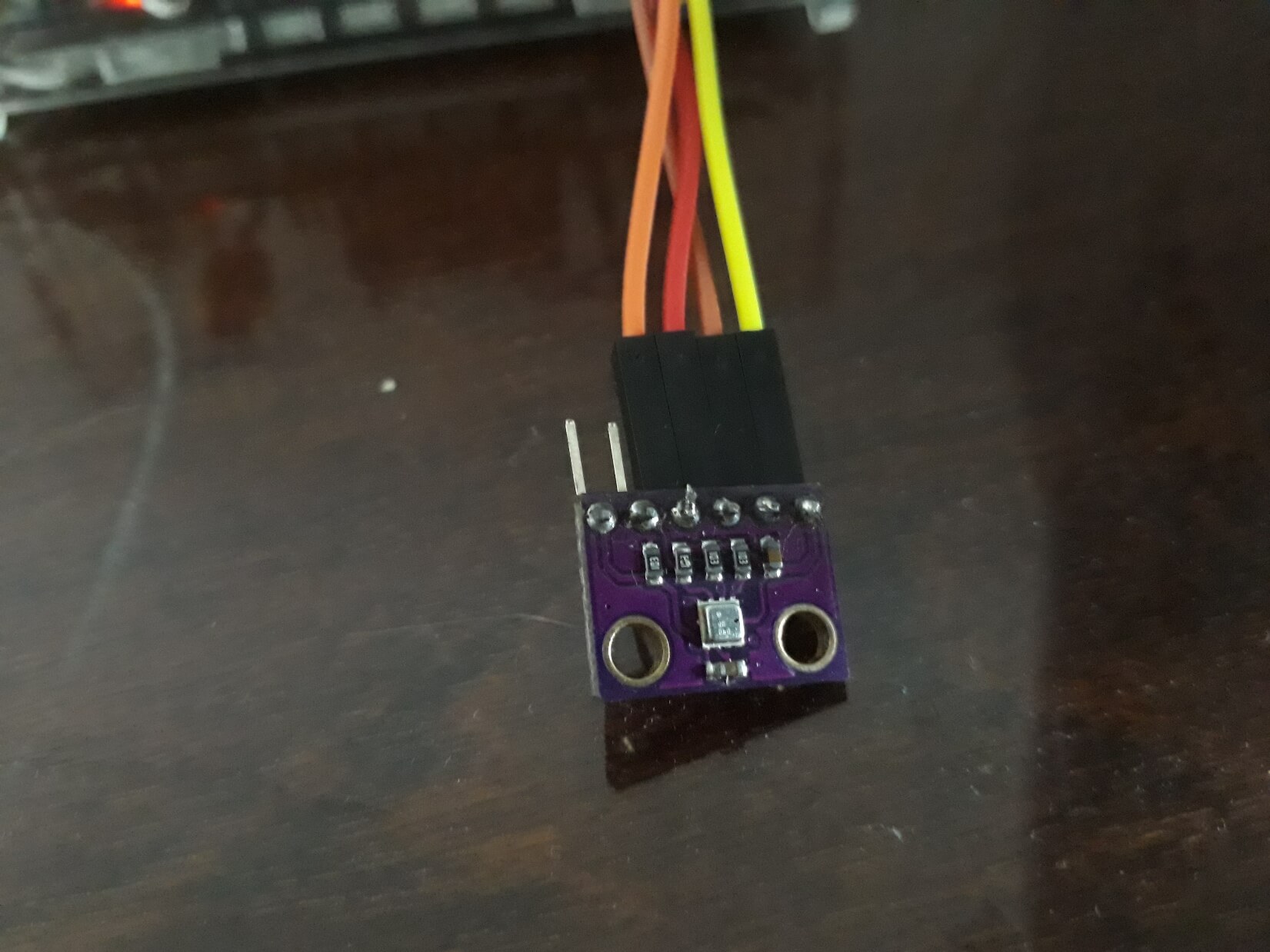
Датчик BME280 очень похож с BMP280, различие в том, что BME280 имеет датчик влажности от чего его корпус шире чем у BMP280. Количество выводов и их расположение на корпусах совпадают. Более детальное описание датчика вы можете найти на странице BME280 — датчик давления, температуры и влажности.
Подключить датчик окружающей среды BME280 к Orange Pi PC можно по I2C и по SPI, их несколько как у Orange Pi, так и у Banana Pi и Raspberry Pi. Также для работы с GPIO необходимо установить WiringOP, если вы работаете с Orange Pi, а если у вас Banana Pi — BPI-WiringPi.
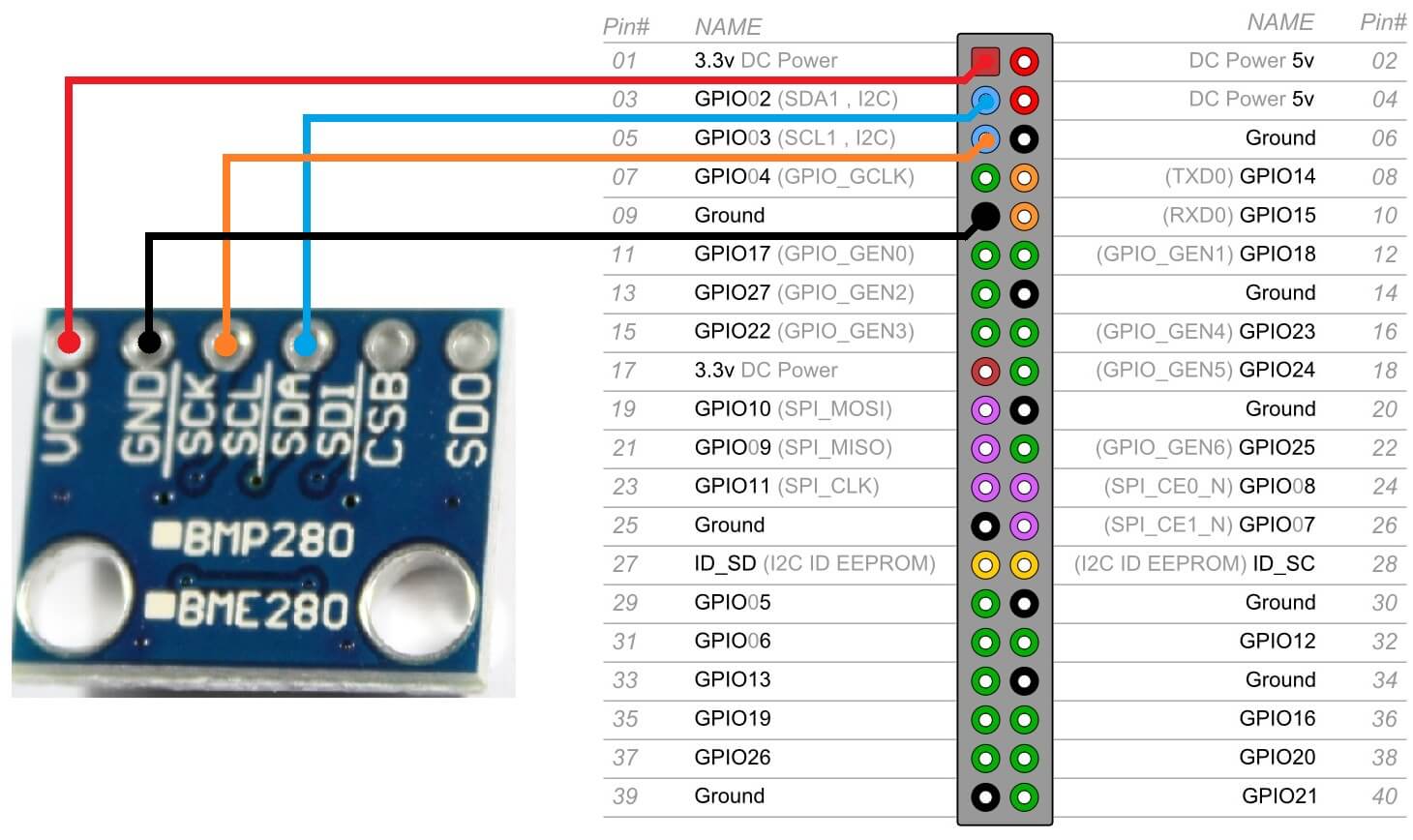
Схема подключения BME280 к Orange Pi/Banana Pi/Raspberry Pi
С этим датчиком я работаю только по I2C. Подключается BME280 к Orange Pi также, как к Banana Pi и Raspberry Pi, у всех GPIO (на 40 пинов) похожие. В данном случае я использовал порт /dev/i2c-2, потому что удобно расположен.
Код программы
Проект написан на С/С++. Использую среду разработки CodeLite IDE, так как среда Code::Blocks у меня не работает нормально.
BME280RawData.h
#include <stdint.h>
class BME280RawData {
private:
uint8_t pmsb;
uint8_t plsb;
uint8_t pxsb;
uint8_t tmsb;
uint8_t tlsb;
uint8_t txsb;
uint8_t hmsb;
uint8_t hlsb;
uint32_t temperature;
uint32_t pressure;
uint32_t humidity;
public:
BME280RawData(uint8_t pmsb, uint8_t plsb, uint8_t pxsb, uint8_t tmsb, uint8_t tlsb, uint8_t txsb, uint8_t hmsb, uint8_t hlsb, uint32_t temperature, uint32_t pressure,
uint32_t humidity) {
this->pmsb = pmsb;
this->plsb = plsb;
this->pxsb = pxsb;
this->tmsb = tmsb;
this->tlsb = tlsb;
this->txsb = txsb;
this->hmsb = hmsb;
this->hlsb = hlsb;
this->temperature = temperature;
this->pressure = pressure;
this->humidity = humidity;
}
BME280RawData() {
this->pmsb = 0;
this->plsb = 0;
this->pxsb = 0;
this->tmsb = 0;
this->tlsb = 0;
this->txsb = 0;
this->hmsb = 0;
this->hlsb = 0;
this->temperature = 0;
this->pressure = 0;
this->humidity = 0;
}
virtual ~BME280RawData() {
}
void setPlsb(uint8_t plsb) {
this->plsb = plsb;
}
void setPmsb(uint8_t pmsb) {
this->pmsb = pmsb;
}
void setPressure(uint32_t pressure) {
this->pressure = pressure;
}
void setPxsb(uint8_t pxsb) {
this->pxsb = pxsb;
}
void setTemperature(uint32_t temperature) {
this->temperature = temperature;
}
void setTlsb(uint8_t tlsb) {
this->tlsb = tlsb;
}
void setTmsb(uint8_t tmsb) {
this->tmsb = tmsb;
}
void setTxsb(uint8_t txsb) {
this->txsb = txsb;
}
uint8_t getPlsb() {
return plsb;
}
uint8_t getPmsb() {
return pmsb;
}
uint32_t getPressure() {
return pressure;
}
uint8_t getPxsb() {
return pxsb;
}
uint32_t getTemperature() {
return temperature;
}
uint8_t getTlsb() {
return tlsb;
}
uint8_t getTmsb() {
return tmsb;
}
uint8_t getTxsb() {
return txsb;
}
void setHlsb(uint8_t hlsb) {
this->hlsb = hlsb;
}
void setHmsb(uint8_t hmsb) {
this->hmsb = hmsb;
}
void setHumidity(uint32_t humidity) {
this->humidity = humidity;
}
uint8_t getHlsb() {
return hlsb;
}
uint8_t getHmsb() {
return hmsb;
}
uint32_t getHumidity() {
return humidity;
}
};
BME280CalibrationData.h
#include <stdint.h>
class BME280CalibrationData {
private:
uint16_t T1;
int16_t T2;
int16_t T3;
uint16_t P1;
int16_t P2;
int16_t P3;
int16_t P4;
int16_t P5;
int16_t P6;
int16_t P7;
int16_t P8;
int16_t P9;
uint8_t H1;
int16_t H2;
uint8_t H3;
int16_t H4;
int16_t H5;
int8_t H6;
public:
BME280CalibrationData() {
T1 = 0;
T2 = 0;
T3 = 0;
P1 = 0;
P2 = 0;
P3 = 0;
P4 = 0;
P5 = 0;
P6 = 0;
P7 = 0;
P8 = 0;
P9 = 0;
H1 = 0;
H2 = 0;
H3 = 0;
H4 = 0;
H5 = 0;
H6 = 0;
}
BME280CalibrationData(uint16_t T1, int16_t T2, int16_t T3, uint16_t P1, int16_t P2, int16_t P3, int16_t P4, int16_t P5, int16_t P6, int16_t P7, int16_t P8, int16_t P9,
uint8_t H1, int16_t H2, uint8_t H3, int16_t H4, int16_t H5, int8_t H6) {
this->P1 = P1;
this->P2 = P2;
this->P3 = P3;
this->P4 = P4;
this->P5 = P5;
this->P6 = P6;
this->P7 = P7;
this->P8 = P8;
this->P9 = P9;
this->T1 = T1;
this->T2 = T2;
this->T3 = T3;
this->H1 = H1;
this->H2 = H2;
this->H3 = H3;
this->H4 = H4;
this->H5 = H5;
this->H6 = H6;
}
virtual ~BME280CalibrationData() {
}
void setP1(uint16_t P1) {
this->P1 = P1;
}
void setP2(int16_t P2) {
this->P2 = P2;
}
void setP3(int16_t P3) {
this->P3 = P3;
}
void setP4(int16_t P4) {
this->P4 = P4;
}
void setP5(int16_t P5) {
this->P5 = P5;
}
void setP6(int16_t P6) {
this->P6 = P6;
}
void setP7(int16_t P7) {
this->P7 = P7;
}
void setP8(int16_t P8) {
this->P8 = P8;
}
void setP9(int16_t P9) {
this->P9 = P9;
}
void setT1(uint16_t T1) {
this->T1 = T1;
}
void setT2(int16_t T2) {
this->T2 = T2;
}
void setT3(int16_t T3) {
this->T3 = T3;
}
uint16_t getP1() {
return P1;
}
int16_t getP2() {
return P2;
}
int16_t getP3() {
return P3;
}
int16_t getP4() {
return P4;
}
int16_t getP5() {
return P5;
}
int16_t getP6() {
return P6;
}
int16_t getP7() {
return P7;
}
int16_t getP8() {
return P8;
}
int16_t getP9() {
return P9;
}
uint16_t getT1() {
return T1;
}
int16_t getT2() {
return T2;
}
int16_t getT3() {
return T3;
}
void setH1(uint8_t H1) {
this->H1 = H1;
}
void setH2(int16_t H2) {
this->H2 = H2;
}
void setH3(uint8_t H3) {
this->H3 = H3;
}
void setH4(int16_t H4) {
this->H4 = H4;
}
void setH5(int16_t H5) {
this->H5 = H5;
}
void setH6(int8_t H6) {
this->H6 = H6;
}
uint8_t getH1() {
return H1;
}
int16_t getH2() {
return H2;
}
uint8_t getH3() {
return H3;
}
int16_t getH4() {
return H4;
}
int16_t getH5() {
return H5;
}
int8_t getH6() {
return H6;
}
};
BME280Data.h
class BMP280Data {
private:
double pressure; // hPa
double temperature; // m
double humidity; // %
double altitude; // °C
public:
BMP280Data() {
pressure = 0;
temperature = 0;
altitude = 0;
humidity = 0;
}
BMP280Data(double pressure, double temperature, double humidity, double altitude) {
this->pressure = pressure;
this->temperature = temperature;
this->humidity = humidity;
this->altitude = altitude;
}
virtual ~BMP280Data() {
}
void setAltitude(double altitude) {
this->altitude = altitude;
}
void setPressure(double pressure) {
this->pressure = pressure;
}
void setTemperature(double temperature) {
this->temperature = temperature;
}
double getAltitude() {
return altitude;
}
double getPressure() {
return pressure;
}
double getTemperature() {
return temperature;
}
void setHumidity(double humidity) {
this->humidity = humidity;
}
double getHumidity() {
return humidity;
}
};
bme280.h
#include <stdint.h>
#include "BME280CalibrationData.h"
#include "BME280RawData.h"
#include "BME280Data.h"
#define MEAN_SEA_LEVEL_PRESSURE 1013
/**\name CHIP ID DEFINITION */
/***********************************************/
#define BME280_CHIP_ID1 (0x60)
/************************************************/
/**\name I2C ADDRESS DEFINITION */
/***********************************************/
#define BME280_I2C_ADDRESS1 (0x76)
#define BME280_I2C_ADDRESS2 (0x77)
/************************************************/
/**\name POWER MODE DEFINITION */
/***********************************************/
/* Sensor Specific constants */
#define BME280_SLEEP_MODE (0x00)
#define BME280_FORCED_MODE (0x01)
#define BME280_NORMAL_MODE (0x03)
#define BME280_SOFT_RESET_CODE (0xB6)
/************************************************/
/**\name STANDBY TIME DEFINITION */
/***********************************************/
#define BME280_STANDBY_TIME_1_MS (0x00)
#define BME280_STANDBY_TIME_63_MS (0x01)
#define BME280_STANDBY_TIME_125_MS (0x02)
#define BME280_STANDBY_TIME_250_MS (0x03)
#define BME280_STANDBY_TIME_500_MS (0x04)
#define BME280_STANDBY_TIME_1000_MS (0x05)
#define BME280_STANDBY_TIME_2000_MS (0x06)
#define BME280_STANDBY_TIME_4000_MS (0x07)
/************************************************/
/**\name OVERSAMPLING DEFINITION */
/***********************************************/
#define BME280_OVERSAMP_SKIPPED (0x00)
#define BME280_OVERSAMP_1X (0x01)
#define BME280_OVERSAMP_2X (0x02)
#define BME280_OVERSAMP_4X (0x03)
#define BME280_OVERSAMP_8X (0x04)
#define BME280_OVERSAMP_16X (0x05)
/************************************************/
/**\name WORKING MODE DEFINITION */
/***********************************************/
#define BME280_ULTRA_LOW_POWER_MODE (0x00)
#define BME280_LOW_POWER_MODE (0x01)
#define BME280_STANDARD_RESOLUTION_MODE (0x02)
#define BME280_HIGH_RESOLUTION_MODE (0x03)
#define BME280_ULTRA_HIGH_RESOLUTION_MODE (0x04)
#define BME280_ULTRALOWPOWER_OVERSAMP_PRESSURE BME280_OVERSAMP_1X
#define BME280_ULTRALOWPOWER_OVERSAMP_HUMIDITY BME280_OVERSAMP_1X
#define BME280_ULTRALOWPOWER_OVERSAMP_TEMPERATURE BME280_OVERSAMP_1X
#define BME280_LOWPOWER_OVERSAMP_PRESSURE BME280_OVERSAMP_2X
#define BME280_LOWPOWER_OVERSAMP_HUMIDITY BME280_OVERSAMP_2X
#define BME280_LOWPOWER_OVERSAMP_TEMPERATURE BME280_OVERSAMP_1X
#define BME280_STANDARDRESOLUTION_OVERSAMP_PRESSURE BME280_OVERSAMP_4X
#define BME280_STANDARDRESOLUTION_OVERSAMP_HUMIDITY BME280_OVERSAMP_4X
#define BME280_STANDARDRESOLUTION_OVERSAMP_TEMPERATURE BME280_OVERSAMP_1X
#define BME280_HIGHRESOLUTION_OVERSAMP_PRESSURE BME280_OVERSAMP_8X
#define BME280_HIGHRESOLUTION_OVERSAMP_HUMIDITY BME280_OVERSAMP_8X
#define BME280_HIGHRESOLUTION_OVERSAMP_TEMPERATURE BME280_OVERSAMP_1X
#define BME280_ULTRAHIGHRESOLUTION_OVERSAMP_PRESSURE BME280_OVERSAMP_16X
#define BME280_ULTRAHIGHRESOLUTION_OVERSAMP_HUMIDITY BME280_OVERSAMP_16X
#define BME280_ULTRAHIGHRESOLUTION_OVERSAMP_TEMPERATURE BME280_OVERSAMP_2X
/************************************************/
/**\name FILTER DEFINITION */
/***********************************************/
#define BME280_FILTER_COEFF_OFF (0x00)
#define BME280_FILTER_COEFF_2 (0x01)
#define BME280_FILTER_COEFF_4 (0x02)
#define BME280_FILTER_COEFF_8 (0x03)
#define BME280_FILTER_COEFF_16 (0x04)
/************************************************/
/*
* REGISTERS
*/
#define BME280_ADDRESS 0x76
#define BME280_REGISTER_DIG_T1 0x88
#define BME280_REGISTER_DIG_T2 0x8A
#define BME280_REGISTER_DIG_T3 0x8C
#define BME280_REGISTER_DIG_P1 0x8E
#define BME280_REGISTER_DIG_P2 0x90
#define BME280_REGISTER_DIG_P3 0x92
#define BME280_REGISTER_DIG_P4 0x94
#define BME280_REGISTER_DIG_P5 0x96
#define BME280_REGISTER_DIG_P6 0x98
#define BME280_REGISTER_DIG_P7 0x9A
#define BME280_REGISTER_DIG_P8 0x9C
#define BME280_REGISTER_DIG_P9 0x9E
#define BME280_REGISTER_DIG_H1 0xA1
#define BME280_REGISTER_DIG_H2 0xE1
#define BME280_REGISTER_DIG_H3 0xE3
#define BME280_REGISTER_DIG_H4 0xE4
#define BME280_REGISTER_DIG_H5 0xE5
#define BME280_REGISTER_DIG_H6 0xE7
#define BME280_REGISTER_CHIPID 0xD0
#define BME280_REGISTER_VERSION 0xD1
#define BME280_REGISTER_SOFTRESET 0xE0
#define BME280_RESET 0xB6
#define BME280_REGISTER_CAL26 0xE1
#define BME280_REGISTER_CONTROLHUMID 0xF2
#define BME280_REGISTER_STATUS 0xF3
#define BME280_REGISTER_CONTROL 0xF4
#define BME280_REGISTER_CONFIG 0xF5
#define BME280_REGISTER_PRESSUREDATA_MSB 0xF7
#define BME280_REGISTER_PRESSUREDATA_LSB 0xF8
#define BME280_REGISTER_PRESSUREDATA_XLSB 0xF9
#define BME280_REGISTER_TEMPDATA_MSB 0xFA
#define BME280_REGISTER_TEMPDATA_LSB 0xFB
#define BME280_REGISTER_TEMPDATA_XLSB 0xFC
#define BME280_REGISTER_HUMIDDATA_MSB 0xFD
#define BME280_REGISTER_HUMIDDATA_LSB 0xFE
class BME280 {
private:
char * device;
int devId;
int fd;
uint8_t chipId;
BME280CalibrationData * bmp280CalibrationData;
BME280RawData * bmp280RawData;
void write8(uint8_t, uint8_t);
int read8(uint8_t);
uint8_t readU8(uint8_t);
int8_t readS8(uint8_t);
int read16(uint8_t);
int16_t readS16(uint8_t);
uint16_t readU16(uint8_t);
int32_t getTemperatureC(int32_t adc_T);
double getAltitude(double pressure);
double compensateTemperature(int32_t t_fine);
double compensatePressure(int32_t adc_P, int32_t t_fine);
double compensateHumidity(int32_t adc_H, int32_t t_fine);
BME280CalibrationData * getCalibrationData();
BME280RawData * getRawData();
public:
BME280(const char*, int);
BME280(int);
virtual ~BME280();
BME280CalibrationData * getBmp280CalibrationData();
BMP280Data * getBMP280Data();
int init();
void reset();
void spi3wEnable();
void spi3wDisable();
void setPowerMode(uint8_t);
void setTemperatureOversampling(uint8_t);
void setPressureOversampling(uint8_t);
void setHumidityOversampling(uint8_t);
void setStandbyTime(uint8_t);
void setIrrFilter(uint8_t);
uint8_t getPowerMode();
uint8_t getPressureOversampling();
uint8_t getHumidityOversampling();
uint8_t getTemperatureOversampling();
uint8_t getIrrFilter();
uint8_t getStandbyTime();
uint8_t getSpi3w();
uint8_t getMeasuringStatus();
uint8_t getImUpdateStatus();
uint8_t getConfig();
uint8_t getStatus();
uint8_t getControl();
uint8_t getControlHumidity();
uint8_t getChipId();
uint8_t getChipVersion();
void setReset(uint8_t);
void setConfig(uint8_t);
void setStatus(uint8_t);
void setControl(uint8_t);
void setControlHumidity(uint8_t);
};
bme280.cpp
#include <string.h>
#include <stdint.h>
#include <stdexcept>
#include <iostream>
#include <stdio.h>
#include <math.h>
#include <wiringPiI2C.h>
#include "bme280.h"
void BME280::write8(uint8_t reg, uint8_t value) {
wiringPiI2CWriteReg8(fd, reg, value);
}
int BME280::read8(uint8_t reg) {
return wiringPiI2CReadReg8(fd, reg);
}
uint8_t BME280::readU8(uint8_t reg) {
return (uint8_t) read8(reg);
}
int8_t BME280::readS8(uint8_t reg) {
return (int8_t) read8(reg);
}
int BME280::read16(uint8_t reg) {
return wiringPiI2CReadReg16(fd, reg);
}
int16_t BME280::readS16(uint8_t reg) {
return (int16_t) read16(reg);
}
uint16_t BME280::readU16(uint8_t reg) {
return (uint16_t) read16(reg);
}
BME280::BME280(const char * device, int devId) :
fd(0), chipId(0), bmp280CalibrationData(0), bmp280RawData(0) {
this->device = new char[strlen(device)];
strcpy(this->device, device);
this->devId = devId;
}
BME280::BME280(int devId) :
fd(0), chipId(0), bmp280CalibrationData(0), bmp280RawData(0) {
this->devId = devId;
}
BME280::~BME280() {
delete bmp280CalibrationData;
delete bmp280RawData;
delete[] device;
}
int BME280::init() {
int fd = wiringPiI2CSetup(devId);
if (fd < 0) {
char buffer[256];
sprintf(buffer, "Device not found: device ID = %d", devId);
throw std::logic_error(buffer);
}
this->fd = fd;
uint8_t chipId = getChipId();
switch (chipId) {
case BME280_CHIP_ID1:
this->chipId = chipId;
break;
default: {
char buffer[256];
sprintf(buffer, "Device Chip ID error: chip ID = %d", chipId);
throw std::logic_error(buffer);
}
}
if (bmp280CalibrationData) {
delete bmp280CalibrationData;
}
bmp280CalibrationData = getCalibrationData();
return fd;
}
BME280CalibrationData * BME280::getCalibrationData() {
int8_t H6;
uint8_t H1, H3;
int16_t T2, T3, P2, P3, P4, P5, P6, P7, P8, P9, H2, H4, H5;
uint16_t T1, P1;
T1 = readU16(BME280_REGISTER_DIG_T1);
T2 = readS16(BME280_REGISTER_DIG_T2);
T3 = readS16(BME280_REGISTER_DIG_T3);
P1 = readU16(BME280_REGISTER_DIG_P1);
P2 = readS16(BME280_REGISTER_DIG_P2);
P3 = readS16(BME280_REGISTER_DIG_P3);
P4 = readS16(BME280_REGISTER_DIG_P4);
P5 = readS16(BME280_REGISTER_DIG_P5);
P6 = readS16(BME280_REGISTER_DIG_P6);
P7 = readS16(BME280_REGISTER_DIG_P7);
P8 = readS16(BME280_REGISTER_DIG_P8);
P9 = readS16(BME280_REGISTER_DIG_P9);
H1 = readU8(BME280_REGISTER_DIG_H1);
H2 = readS16(BME280_REGISTER_DIG_H2);
H3 = readU8(BME280_REGISTER_DIG_H3);
H4 = (int16_t)((read8(BME280_REGISTER_DIG_H4) << 4) | (read8(BME280_REGISTER_DIG_H4 + 1) & 0xF));
H5 = (int16_t)((read8(BME280_REGISTER_DIG_H5 + 1) << 4) | (read8(BME280_REGISTER_DIG_H5) >> 4));
H6 = readS8(BME280_REGISTER_DIG_H6);
return new BME280CalibrationData(T1, T2, T3, P1, P2, P3, P4, P5, P6, P7, P8, P9, H1, H2, H3, H4, H5, H6);
}
BME280CalibrationData * BME280::getBmp280CalibrationData() {
return bmp280CalibrationData;
}
BME280RawData * BME280::getRawData() {
uint8_t pmsb, plsb, pxsb;
uint8_t tmsb, tlsb, txsb;
uint8_t hmsb, hlsb;
uint32_t temperature, pressure, humidity;
plsb = readU8(BME280_REGISTER_PRESSUREDATA_LSB);
pmsb = readU8(BME280_REGISTER_PRESSUREDATA_MSB);
pxsb = readU8(BME280_REGISTER_PRESSUREDATA_XLSB);
tmsb = readU8(BME280_REGISTER_TEMPDATA_MSB);
tlsb = readU8(BME280_REGISTER_TEMPDATA_LSB);
txsb = readU8(BME280_REGISTER_TEMPDATA_XLSB);
hmsb = readU8(BME280_REGISTER_HUMIDDATA_MSB);
hlsb = readU8(BME280_REGISTER_HUMIDDATA_LSB);
temperature = 0;
temperature = (temperature | tmsb) << 8;
temperature = (temperature | tlsb) << 8;
temperature = (temperature | txsb) >> 4;
pressure = 0;
pressure = (pressure | pmsb) << 8;
pressure = (pressure | plsb) << 8;
pressure = (pressure | pxsb) >> 4;
humidity = 0;
humidity = (humidity | hmsb) << 8;
humidity = (humidity | hlsb);
return new BME280RawData(pmsb, plsb, pxsb, tmsb, tlsb, txsb, hmsb, hlsb, temperature, pressure, humidity);
}
void BME280::reset() {
setReset (BME280_SOFT_RESET_CODE);
}
void BME280::spi3wEnable() {
uint8_t config = getConfig();
setConfig(config | 0b00000001);
}
void BME280::spi3wDisable() {
uint8_t config = getConfig();
setConfig(config & 0b11111110);
}
void BME280::setPowerMode(uint8_t mode) {
switch (mode) {
case BME280_FORCED_MODE:
case BME280_NORMAL_MODE:
case BME280_SLEEP_MODE: {
uint8_t curentMode = getControl() & 0b11111100;
setControl(curentMode | mode);
break;
}
default:
break;
}
}
void BME280::setTemperatureOversampling(uint8_t oversampling) {
switch (oversampling) {
case BME280_OVERSAMP_SKIPPED:
case BME280_OVERSAMP_1X:
case BME280_OVERSAMP_2X:
case BME280_OVERSAMP_4X:
case BME280_OVERSAMP_8X:
case BME280_OVERSAMP_16X: {
uint8_t curentOversampling = getControl() & 0b00011111;
setControl(curentOversampling | (oversampling << 5));
break;
}
default:
break;
}
}
void BME280::setPressureOversampling(uint8_t oversampling) {
switch (oversampling) {
case BME280_OVERSAMP_SKIPPED:
case BME280_OVERSAMP_1X:
case BME280_OVERSAMP_2X:
case BME280_OVERSAMP_4X:
case BME280_OVERSAMP_8X:
case BME280_OVERSAMP_16X: {
uint8_t curentOversampling = getControl() & 0b11100011;
setControl(curentOversampling | (oversampling << 2));
break;
}
default:
break;
}
}
void BME280::setHumidityOversampling(uint8_t oversampling) {
switch (oversampling) {
case BME280_OVERSAMP_SKIPPED:
case BME280_OVERSAMP_1X:
case BME280_OVERSAMP_2X:
case BME280_OVERSAMP_4X:
case BME280_OVERSAMP_8X:
case BME280_OVERSAMP_16X: {
setControlHumidity(0b00000111 & oversampling);
break;
}
default:
break;
}
}
uint8_t BME280::getHumidityOversampling() {
return getControlHumidity() & 0b00000111;
}
void BME280::setStandbyTime(uint8_t tStandby) {
switch (tStandby) {
case BME280_STANDBY_TIME_1_MS:
case BME280_STANDBY_TIME_63_MS:
case BME280_STANDBY_TIME_125_MS:
case BME280_STANDBY_TIME_250_MS:
case BME280_STANDBY_TIME_500_MS:
case BME280_STANDBY_TIME_1000_MS:
case BME280_STANDBY_TIME_2000_MS:
case BME280_STANDBY_TIME_4000_MS: {
uint8_t config = getConfig() & 0b00011111;
setConfig(config | (tStandby << 5));
break;
}
default:
break;
}
}
void BME280::setIrrFilter(uint8_t irrFilter) {
switch (irrFilter) {
case BME280_FILTER_COEFF_OFF:
case BME280_FILTER_COEFF_2:
case BME280_FILTER_COEFF_4:
case BME280_FILTER_COEFF_8:
case BME280_FILTER_COEFF_16: {
uint8_t config = getConfig() & 0b11100011;
setConfig(config | (irrFilter << 2));
break;
}
default:
break;
}
}
uint8_t BME280::getPowerMode() {
return getControl() & 0b00000011;
}
uint8_t BME280::getPressureOversampling() {
return (getControl() & 0b00011100) >> 2;
}
uint8_t BME280::getTemperatureOversampling() {
return (getControl() & 0b11100000) >> 5;
}
uint8_t BME280::getIrrFilter() {
return (getConfig() & 0b00011100) >> 2;
}
uint8_t BME280::getStandbyTime() {
return (getConfig() & 0b11100000) >> 5;
}
uint8_t BME280::getSpi3w() {
return (getConfig() & 0b00000001) >> 5;
}
uint8_t BME280::getMeasuringStatus() {
return (getStatus() >> 3) & 0b00000001;
}
uint8_t BME280::getImUpdateStatus() {
return getStatus() & 0b00000001;
}
uint8_t BME280::getConfig() {
return readU8(BME280_REGISTER_CONFIG);
}
uint8_t BME280::getStatus() {
return readU8(BME280_REGISTER_STATUS);
}
uint8_t BME280::getControl() {
return readU8(BME280_REGISTER_CONTROL);
}
uint8_t BME280::getControlHumidity() {
return readU8(BME280_REGISTER_CONTROLHUMID);
}
uint8_t BME280::getChipId() {
return readU8(BME280_REGISTER_CHIPID);
}
uint8_t BME280::getChipVersion() {
return readU8(BME280_REGISTER_VERSION);
}
void BME280::setReset(uint8_t value) {
write8(BME280_REGISTER_SOFTRESET, value);
}
void BME280::setConfig(uint8_t value) {
write8(BME280_REGISTER_CONFIG, value);
}
void BME280::setStatus(uint8_t value) {
write8(BME280_REGISTER_STATUS, value);
}
void BME280::setControl(uint8_t value) {
write8(BME280_REGISTER_CONTROL, value);
}
void BME280::setControlHumidity(uint8_t value) {
write8(BME280_REGISTER_CONTROLHUMID, value);
}
double BME280::getAltitude(double pressure) {
return 44330.0 * (1.0 - pow(pressure / MEAN_SEA_LEVEL_PRESSURE, 0.190294957));
}
int32_t BME280::getTemperatureC(int32_t adc_T) {
int32_t var1 = ((((adc_T >> 3) - ((int32_t) bmp280CalibrationData->getT1() << 1))) * ((int32_t) bmp280CalibrationData->getT2())) >> 11;
int32_t var2 = (((((adc_T >> 4) - ((int32_t) bmp280CalibrationData->getT1())) * ((adc_T >> 4) - ((int32_t) bmp280CalibrationData->getT1()))) >> 12)
* ((int32_t) bmp280CalibrationData->getT3())) >> 14;
return var1 + var2;
}
double BME280::compensateTemperature(int32_t t_fine) {
double T = (t_fine * 5 + 128) >> 8;
return T / 100;
}
double BME280::compensatePressure(int32_t adc_P, int32_t t_fine) {
int64_t var1, var2, p;
var1 = ((int64_t) t_fine) - 128000;
var2 = var1 * var1 * (int64_t) bmp280CalibrationData->getP6();
var2 = var2 + ((var1 * (int64_t) bmp280CalibrationData->getP5()) << 17);
var2 = var2 + (((int64_t) bmp280CalibrationData->getP4()) << 35);
var1 = ((var1 * var1 * (int64_t) bmp280CalibrationData->getP3()) >> 8) + ((var1 * (int64_t) bmp280CalibrationData->getP2()) << 12);
var1 = (((((int64_t) 1) << 47) + var1)) * ((int64_t) bmp280CalibrationData->getP1()) >> 33;
if (var1 == 0) {
return 0; // avoid exception caused by division by zero
}
p = 1048576 - adc_P;
p = (((p << 31) - var2) * 3125) / var1;
var1 = (((int64_t) bmp280CalibrationData->getP9()) * (p >> 13) * (p >> 13)) >> 25;
var2 = (((int64_t) bmp280CalibrationData->getP8()) * p) >> 19;
p = ((p + var1 + var2) >> 8) + (((int64_t) bmp280CalibrationData->getP7()) << 4);
return (double) p / 256;
}
double BME280::compensateHumidity(int32_t adc_H, int32_t t_fine) {
int32_t v_x1_u32r;
v_x1_u32r = (t_fine - ((int32_t) 76800));
v_x1_u32r = (((((adc_H << 14) - (((int32_t) bmp280CalibrationData->getH4()) << 20) - (((int32_t) bmp280CalibrationData->getH5()) * v_x1_u32r)) + ((int32_t) 16384)) >> 15)
* (((((((v_x1_u32r * ((int32_t) bmp280CalibrationData->getH6())) >> 10) * (((v_x1_u32r * ((int32_t) bmp280CalibrationData->getH3())) >> 11) + ((int32_t) 32768))) >> 10)
+ ((int32_t) 2097152)) * ((int32_t) bmp280CalibrationData->getH2()) + 8192) >> 14));
v_x1_u32r = (v_x1_u32r - (((((v_x1_u32r >> 15) * (v_x1_u32r >> 15)) >> 7) * ((int32_t) bmp280CalibrationData->getH1())) >> 4));
v_x1_u32r = (v_x1_u32r < 0) ? 0 : v_x1_u32r;
v_x1_u32r = (v_x1_u32r > 419430400) ? 419430400 : v_x1_u32r;
double h = (v_x1_u32r >> 12);
return h / 1024.0;
}
BMP280Data * BME280::getBMP280Data() {
int32_t t_fine;
double t, p, h, a;
while (getMeasuringStatus()) {
}
if (bmp280RawData) {
delete bmp280RawData;
}
bmp280RawData = getRawData();
t_fine = getTemperatureC(bmp280RawData->getTemperature());
t = compensateTemperature(t_fine); // C
p = compensatePressure(bmp280RawData->getPressure(), t_fine) / 100; // hPa
h = compensateHumidity(bmp280RawData->getHumidity(), t_fine);
a = getAltitude(p); // meters
return new BMP280Data(p, t, h, a);
}
main.cpp
#include <stdio.h>
#include <string.h>
#include <stdexcept>
#include <iostream>
#include <stdint.h>
#include <time.h>
#include <math.h>
#include <wiringPiI2C.h>
#include <wiringPi.h>
#include "bme280.h"
int main() {
// char * device = "/dev/i2c-0";
// char * device = "/dev/i2c-1";
char * device = "/dev/i2c-2";
// char * device = "/dev/i2c-3";
int devId = BME280_I2C_ADDRESS1;
try {
BME280 * bme280 = new BME280(device, devId);
int fd = bme280->init();
bme280->reset();
if (fd < 0) {
printf("Device not found");
return -1;
}
printf("fd : 0x%02x\n", fd);
printf("chip id : 0x%02x\n", bme280->getChipId());
printf("chip ver : 0x%02x\n", bme280->getChipVersion());
bme280->reset();
bme280->setPowerMode(BME280_NORMAL_MODE);
bme280->setTemperatureOversampling(BME280_ULTRAHIGHRESOLUTION_OVERSAMP_TEMPERATURE);
bme280->setPressureOversampling(BME280_ULTRAHIGHRESOLUTION_OVERSAMP_PRESSURE);
bme280->setHumidityOversampling(BME280_ULTRAHIGHRESOLUTION_OVERSAMP_HUMIDITY);
bme280->setIrrFilter(BME280_FILTER_COEFF_16);
bme280->setStandbyTime(BME280_STANDBY_TIME_250_MS);
printf("---------------\n");
printf("pw mode : 0x%02x\n", bme280->getPowerMode());
printf("osrs_p : 0x%02x\n", bme280->getPressureOversampling());
printf("osrs_t : 0x%02x\n", bme280->getTemperatureOversampling());
printf("osrs_h : 0x%02x\n", bme280->getHumidityOversampling());
printf("---------------\n");
printf("filter : 0x%02x\n", bme280->getIrrFilter());
printf("t_sb : 0x%02x\n", bme280->getStandbyTime());
printf("---------------\n");
printf("spi3w sts: 0x%02x\n", bme280->getSpi3w());
printf("measuring: 0x%02x\n", bme280->getMeasuringStatus());
printf("im_update: 0x%02x\n", bme280->getImUpdateStatus());
printf("---------------\n");
while (1) {
delay(1000);
BMP280Data * bme280Data = bme280->getBMP280Data();
printf("pressure : %.2f \tmm Hg\n", bme280Data->getPressure() / 1.3332239);
printf("humidity : %.2f \t%c\n", bme280Data->getHumidity(), '%');
printf("temperature: %.2f \t°C\n", bme280Data->getTemperature());
printf("altitude : %.2f \tm\n\n", bme280Data->getAltitude());
}
delete bme280;
} catch (std::exception & e) {
printf("%s\n", e.what());
}
return 0;
}
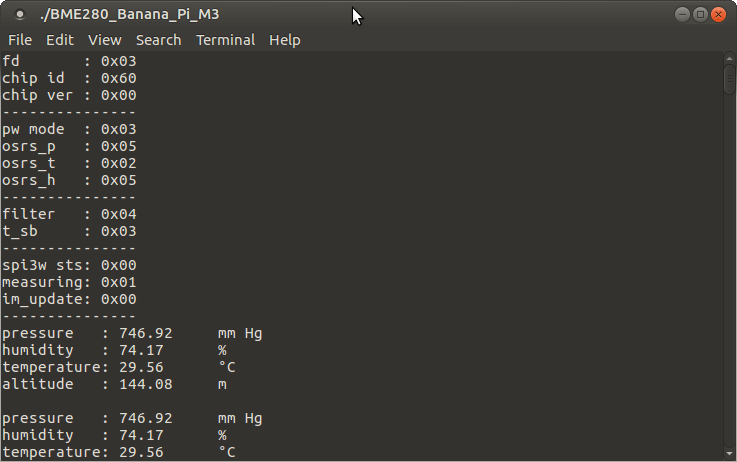
Результат


Скачать проект CodeLite
CodeLite проект: BME280_Banana_Pi_M3.zip
Flyer: BST-BME280-FL000-02
Datasheet: BST-BME280-DS001-11
Handling, soldering & mounting instructions: BST-BME280-HS001-06
Shipment & packaging details: BST-BME280-SP000-00
Driver: BME280 driver










Добрый день. Не понятно, что делать с кодом, куда вставлять? Создать файлы, куда их помещать, какими командами запускать в терминале? Компилировать нужно? Как это делать? Для кого эта инструкция?
BME-280 от BMP-280 отличается наличием датчика атмосферного давления, а от ширины корпуса зависит только от напряжения питания. Широкий — 3.3В Узкий — 5В.
досуг Донецк проститутки
Ищете заказать проститутку в Донецке? Мы предлагаем профессиональные индивидуалки этого города для вашего удовольствия и релакса! У нас только проверенные девушки с идеальной внешностью и лучшим сервисом. Хотите вызвать индивидуалку на вечер? Обращайтесь к нам, и ваши фантазии станут реальностью!
Не пропустите возможность провести время с самыми привлекательными проститутками города Донецк.
проститутки выезд Донецк
Задумались, где заказать индивидуалку в городе Донецк? Мы предлагаем профессиональные индивидуалки Донецка для вашего удовольствия! У нас всегда профессиональные проститутки с безупречным внешним видом и лучшим сервисом. Желаете вызвать индивидуалку на вечер? Свяжитесь с нами, и ваши мечты осуществятся!
Не пропустите возможность провести время с самыми горячими девушками Донецка.
оружие самообороны без лицензии интернет магазин
Круглосуточная доставка алкоголя в Москве: Удобство, скорость и доступность 24/7
Сегодня, в динамичном темпе Москвы, доставка алкоголя круглосуточно стала для многих незаменимой услугой. Устраиваете ли вы вечер с друзьями, хотите провести уютный вечер вдвоем или просто ищете способ расслабиться после тяжелого дня, услуга доставки — ваш идеальный выбор.
Почему стоит выбрать доставку?
доставка алкоголя москва 24
Экономия времени
Нет нужды ехать в магазин или искать ближайшую торговую точку. Сделали заказ — ждите доставку прямо к вашей двери.
Доступность 24/7
В любое время дня и ночи можно сделать заказ. Неважно, день или ночь — ваш заказ будет доставлен быстро и удобно.
Широкий выбор
Ассортимент в онлайн-магазинах способен удивить — от классических напитков до эксклюзивных видов алкоголя.
Комфорт и безопасность
Вы остаетесь дома и избегаете любых неудобств. Особенно это актуально в плохую погоду или после напряженного дня.
Выгодные предложения
Многие сервисы радуют скидками для постоянных клиентов. Каждый клиент может найти для себя специальные предложения.
Больше никаких ограничений
Ваши вечеринки больше не зависят от расписания супермаркетов. Заказ на сайте или в приложении — и любимый напиток у вас дома за считанные минуты.
Службы доставки в Москве помогают экономить время и усилия. Попробуйте сами и убедитесь, насколько удобно это решение.
Заказывайте — наслаждайтесь моментом!
?? Номер для заказа: 8 (495) 095-95-99
?? Сайт: alco-magic.site
?? Мы доставляем 24/7!
#ДоставкаАлкоголя #АлкогольМосква #ВашКомфорт #Круглосуточно #ДоставкаНаДом
Sheet music sheetmusic
купит аккаунты онлайн marketplace-sell-accounts.ru
Устал проигрывать в игровом клубе? Хватит делать ставки наугад! Подписывайся на Наш Telegram канал «Рейтинг Казино»! ??
Забудь о потерянных средствах и крушениях надежд! Наш Telegram-канал «Наш канал» станет твоим верным проводником в вселенной ставок!
Что тебя поджидает в канале:
Беспристрастные анализы заведений: Мы анализируем все — от лицензии и репутации до премий и времени выплат. Никаких пиара, только открытая информация!
Свежие списки: Посмотри, какие платформы реально выплачивают выигрыши и предлагают лучшие требования для клиентов!
Особенные подарки и купоны: Бери самые выгодные предложения от надежных казино!
Свежие сообщения из сферы азартных игр: Будь в теме новых событий и направлений!
Рекомендации и тактики от профессиональных игроков: Увеличь свои шансы на выигрыш и делай ставки с рассудительностью!
Хватит надеяться на везение! Пора делать ставки обдуманно!
Присоединяйся на «Наш Telegram канал «Рейтинг Казино»» прямо сейчас и преврати игру в доход!
https://telegra.ph/Sravnenie-Kazino-Metodologiya-Rejtinga-i-Ocenki-03-23-4
Устал проигрывать в игровом клубе? Перестань играть наугад! Вступай на Канал «Рейтинг Казино»! ??
Оставь в прошлом о слитых вкладах и разочарованиях! Наш Telegram-канал «Рейтинг Казино» будет твоим надежным гидом в мире ставок!
Что тебя ожидает в нашем канале:
Объективные анализы заведений: Мы изучаем все — от правового статуса и доброго имени до бонусов и времени платежей. Никакой рекламы, только открытая данные!
Актуальные списки: Узнай, какие именно заведения действительно переводят деньги и обеспечивают лучшие условия для игроков!
Особенные подарки и коды: Получай наиболее прибыльные предложения от надежных казино!
Актуальные сообщения из сферы азартных игр: Пребывай в знании новых фактов и тенденций!
Советы и стратегии от опытных клиентов: Увеличь свои шансы на победу и играй с рассудительностью!
Довольно полагаться на удачу! Пришло время играть разумно!
Подписывайся на «Рейтинг Казино» сейчас же и преврати игру в выгоду!
https://telegra.ph/Sravnenie-Kazino-Rejting-po-Klyuchevym-Parametram-03-23-7
Устал терять в азартном доме? Хватит делать ставки без разбора! Вступай на Рейтинг Казино! ??
Забудь о слитых вкладах и разочарованиях! Наш Telegram-канал «Наш канал» будет твоим верным проводником в мире гемблинга!
Что именно тебя поджидает в здесь:
Независимые анализы заведений: Мы анализируем каждый аспект — от правового статуса и доброго имени до премий и времени платежей. Никаких рекламы, только правдивая сведения!
Свежие табели о рангах: Выясни, какие казино на самом деле переводят призы и предлагают лучшие условия для пользователей!
Эксклюзивные подарки и коды: Воспользуйся наиболее прибыльные предложения от надежных заведений!
Свежие известия из области гемблинга: Оставайся в теме новых случаев и направлений!
Указания и тактики от опытных клиентов: Повысь свои возможности на успех и делай ставки с рассудительностью!
Хватит полагаться на удачу! Пора делать ставки обдуманно!
Присоединяйся на «Рейтинг Казино» сейчас же и сделай процесс в прибыль!
https://telegra.ph/Kazino-Slovar-Rejting-Platform-po-Ponyatnosti-Interfejsa-03-23-6
Устал проигрывать в казино? Довольно ставить без разбора! Присоединяйся на Рейтинг Казино! ??
Оставь в прошлом о проигранных депозитах и огорчениях! Наш Telegram-канал «Канал «Рейтинг Казино»» станет твоим верным проводником в вселенной азартных игр!
Что именно тебя ждет в здесь:
Объективные рецензии заведений: Мы изучаем все — от правового статуса и доброго имени до бонусов и времени переводов. Никаких продвижения, исключительно открытая информация!
Актуальные рейтинги: Узнай, какие именно платформы на самом деле переводят деньги и дают оптимальные условия для пользователей!
Особенные бонусы и промокоды: Воспользуйся лучшие варианты от заслуживающих доверия заведений!
Свежие новости из области гемблинга: Пребывай в знании последних фактов и трендов!
Советы и планы от бывалых пользователей: Увеличь свои шансы на выигрыш и играй с рассудительностью!
Перестань полагаться на удачу! Самое время играть обдуманно!
Вступай на «Наш Telegram канал «Рейтинг Казино»» немедленно и преврати азарт в прибыль!
https://telegra.ph/Kazino-Kotorye-Zabotyatsya-Rejting-Platform-s-Otvetstvennoj-Igroj-03-23-6
iphone cases iphone worth
где продать аккаунт сервис магазина аккаунтов
купить аккаунты в соц сетях продажа аккаунтов продать
Устал проигрывать в казино? Хватит играть без разбора! Вступай на Рейтинг Казино! ??
Оставь в прошлом о проигранных вкладах и огорчениях! Наш Telegram-канал «Канал «Рейтинг Казино»» превратится в твоим надежным гидом в мире гемблинга!
Что именно тебя поджидает в здесь:
Независимые рецензии казино: Мы изучаем все — от лицензии и доброго имени до бонусов и быстроты переводов. Никаких рекламы, лишь правдивая сведения!
Актуальные списки: Узнай, какие именно платформы на самом деле выплачивают призы и дают лучшие условия для пользователей!
Эксклюзивные бонусы и коды: Бери наиболее прибыльные варианты от заслуживающих доверия казино!
Актуальные известия из сферы гемблинга: Пребывай в курсе новых случаев и тенденций!
Советы и тактики от бывалых клиентов: Повысь свои вероятность на успех и делай ставки с рассудительностью!
Довольно рассчитывать на удачу! Самое время играть разумно!
Подписывайся на «Канал «Рейтинг Казино»» немедленно и преврати игру в выгоду!
https://t.me/s/spisok_luchshih_kazino
Устал терять в азартном доме? Довольно играть вслепую! Вступай на Наш Telegram канал «Рейтинг Казино»! ??
Позабудь о потерянных депозитах и крушениях надежд! Наш Telegram-канал «Канал «Рейтинг Казино»» станет твоим надежным помощником в сфере ставок!
Что же тебя ждет в канале:
Объективные рецензии заведений: Мы анализируем каждый аспект — от лицензии и репутации до плюшек и быстроты выплат. Никаких рекламы, только правдивая данные!
Последние рейтинги: Выясни, какие именно платформы на самом деле переводят выигрыши и предлагают оптимальные правила для клиентов!
Эксклюзивные бонусы и коды: Бери лучшие предложения от заслуживающих доверия казино!
Актуальные сообщения из области ставок: Будь в знании свежих фактов и тенденций!
Указания и планы от опытных клиентов: Улучши свои возможности на победу и играй с головой!
Перестань рассчитывать на фортуну! Пришло время ставить разумно!
Подписывайся на «Рейтинг Казино» прямо сейчас и преобразуй процесс в доход!
https://t.me/s/spisok_luchshih_kazino
Устал проигрывать в казино? Довольно ставить наугад! Подписывайся на Наш Telegram канал «Рейтинг Казино»! ??
Оставь в прошлом о слитых средствах и разочарованиях! Наш Telegram-канал «Канал «Рейтинг Казино»» будет твоим надежным проводником в сфере азартных игр!
Что именно тебя ожидает в здесь:
Беспристрастные обзоры игровых платформ: Мы анализируем каждый аспект — от разрешения и доброго имени до бонусов и быстроты выплат. Никаких рекламы, только честная информация!
Свежие рейтинги: Узнай, какие заведения действительно переводят выигрыши и предлагают оптимальные правила для пользователей!
Особенные подарки и промокоды: Воспользуйся лучшие предложения от проверенных заведений!
Последние сообщения из сферы гемблинга: Пребывай в знании последних случаев и тенденций!
Указания и планы от профессиональных клиентов: Повысь свои возможности на победу и делай ставки с головой!
Перестань полагаться на удачу! Пора делать ставки обдуманно!
Вступай на «Канал «Рейтинг Казино»» немедленно и сделай игру в выгоду!
https://t.me/s/spisok_luchshih_kazino
купить анализ антитела https://analiz-kupit-spb.ru
ремонт посудомоечной медея мастер по ремонту стиральных машин
Find the Perfect Clock clocks-top for Any Space! Looking for high-quality clocks? At Top Clocks, we offer a wide selection, from alarm clocks to wall clocks, mantel clocks, and more. Whether you prefer modern, vintage, or smart clocks, we have the best options to enhance your home. Explore our collection and find the perfect timepiece today!
Доска объявлений https://estul.ru/blog по всей России: продавай и покупай товары, заказывай и предлагай услуги. Быстрое размещение, удобный поиск, реальные предложения. Каждый после регистрации получает на баланс аккаунта 100? для возможности бесплатного размещения ваших объявлений
роллы барнаул https://sushibarnaul.ru/
buy hemp in prague buy weed in prague
Витебский госуниверситет университет https://vsu.by/inostrannym-abiturientam/spetsialnosti.html П.М.Машерова — образовательный центр. Вуз является ведущим образовательным, научным и культурным центром Витебской области. ВГУ осуществляет подготовку: химия, биология, история, физика, программирование, педагогика, психология, математика.
cost of sildenafil
Витебский университет П.М.Машерова https://vsu.by образовательный центр. Вуз является ведущим образовательным, научным и культурным центром Витебской области.
аренда машины адлер цены 2025 прокат авто сочи адлер
снять автомобиль в аренду в сочи аренда машины в сочи без водителя недорого
клининг уборка квартиры спб генеральная уборка санкт петербург
клининг квартиры недорого уборка квартир стоимость
взять машину в аренду на месяц москва аренда авто в москве для личного пользования
аренда авто в аэропорту храброво калининград аренда авто в аэропорту храброво калининград
аренда авто без взноса прокат авто бизнес класса
аренда авто на месяц владивосток аренда авто во владивостоке без водителя недорого
аренда машины спб москва аренда автомобиля на месяц спб
https://tgstat.ru/channel/@VavadaRuGame/1509
radio alarm clock phone combo alarm-radio-clocks.com/
The convenient Zabljak hotels service will help you find the perfect hotel for car travelers and active holiday lovers. A wide range of accommodation: from cozy guest houses to modern hotels with parking, Wi-Fi and breakfast. Book in advance and relax in comfort in the heart of Montenegro!
Официальный TG канал проекта – 1win casinо, теперь в вашем Telegram! Подробнее тут
https://t.me/Game_1win_ru/714
The best online slots rise of olympus slot in one place: classics, new releases, jackpots and themed machines. Play without registration, test the demo or make real bets with bonuses.
Профессиональное агентство рекламное агентство Витрувий: разработка рекламы, брендинг, digital-маркетинг, наружка и SMM. Комплексное продвижение для бизнеса любого масштаба.
гарантия при продаже аккаунтов https://marketplace-akkauntov-top.ru
Официальный TG канал проекта – 7k casinо, теперь в вашем Telegram! Подробнее тут
7k casino
Запечатлейте моменты Куршская коса экскурсии из Калининграда фото в профессиональном качестве.
покупка гифт карт подарочная карта через интернет
comics spikes free digital comics reader
manga almighty manga 2025 updates HD
https://t.me/kupit_prodat_onkolekarstva/45
https://t.me/kupit_prodat_onkolekarstva/27
фільми 2025 вже вийшли дивитися українське кіно онлайн 2025
https://t.me/kupit_prodat_onkolekarstva/33
https://t.me/Top_Spisok_Game/161
фильмы онлайн драмы русские фильмы 2025 онлайн бесплатно
фильме полностью онлайн фильмы в 4К бесплатно онлайн
смотреть фильм полностью комедии 2025 онлайн в хорошем качестве
фильм драма 2025 боевики 2025 смотреть бесплатно HD
magazin-akkauntov-online.ru magazin-akkauntov-online.ru
фильм полностью фильмы 2025 без регистрации и рекламы
военные фильмы 2025 фильмы 2025 без регистрации и рекламы
фильм драма детектив лучшие фильмы 2025 года в HD
русские фильмы онлайн качество фильмы в 4К бесплатно онлайн
смотреть фильмы 2025 русские фильмы 2025 онлайн бесплатно
смотреть фильмы бесплатно боевики 2025 смотреть бесплатно HD
русские фильмы онлайн качество боевики 2025 смотреть бесплатно HD
бесплатные фильмы драма лучшие фильмы 2025 года в HD
фильмы уже вышедшие бесплатно смотреть кино на телефоне в Full HD
услуги по продаже аккаунтов магазин аккаунтов социальных сетей
сколько стоит металлический значок металлические значки
значки на одежду металлические metallicheskie-znachki-zakaz.ru
металлические значки на рюкзак https://izgotovlenie-znachkov-moskva.ru
аккаунты с балансом маркетплейс аккаунтов
размер металлического значка значки на заказ металлические
https://uniquepodcastsolutions.com Comprehensive podcast solutions for creators and businesses.
перепродажа аккаунтов купить аккаунт
клиника медицинские услуги медицинская клиника абакан
вены на ногах варикоз лечение https://lechenie-varikoza1.ru/
гинеколог абакан платно платная клиника гинеколог
покупка аккаунтов аккаунты с балансом
лазерная эпиляция рук лазерная эпиляция для женщин
лазерная эпиляция глубокое бикини лазерная эпиляция лица
курс лазерной эпиляции подмышек лазерная эпиляция подмышек спб
печать буклетов тираж заказать печать буклетов
купить аккаунт перепродажа аккаунтов
маркетплейс для реселлеров маркетплейс аккаунтов соцсетей
печать наклеек широкоформатная печать наклеек
таблички пвх купить табличка пвх с ламинацией
календарь на печать по месяцам календарь для печати а4
печать плакатов купить https://pechat-plakatov-spb.ru
изготовление лабораторных стендов изготовление стендов табличек
Accounts marketplace Database of Accounts for Sale
Account Trading Platform Accounts market
Account Selling Platform Account Trading
Account marketplace Database of Accounts for Sale
Buy Pre-made Account Accounts marketplace
Account Purchase Account Selling Platform
Account Acquisition Account Selling Service
Account market Accounts for Sale
http://images.google.ca/url?q=https://t.me/VAVADA_OFFICIAL_SLOTS/1748
website for selling accounts ready-made accounts for sale
account acquisition account buying service
secure account purchasing platform find accounts for sale
buy and sell accounts account trading
account selling service website for buying accounts
открытие бизнеса в великобритании открыть фирму в великобритании
sell account account exchange
account sale buy account
открыть компанию в великобритании открытие компании в великобритании
cloud server low cost cloud server us
accounts market account marketplace
Современный и удобный сайт yuryloza.ru на котором легко найти нужную информацию, товары или услуги. Простая навигация, понятный интерфейс и актуальное содержание подойдут как для новых пользователей, так и для постоянной аудитории. Работает быстро, доступен круглосуточно.
account selling platform account exchange
Онлайн проект top-vpn ru где собраны полезные данные, инструменты и сервисы для повседневной жизни и профессиональной деятельности. Сайт адаптирован под любые устройства, стабильно работает и предоставляет максимум пользы без лишнего шума и рекламы.
account trading service website for selling accounts
account trading platform online account store
Современный сайт basaproektov.ru на котором легко найти нужную и полезную информацию, товары или услуги. Простая навигация, понятный интерфейс и актуальное содержание подойдут как для новых пользователей, так и для постоянной аудитории. Работает быстро, доступен круглосуточно.
website for buying accounts buy and sell accounts
account acquisition account market
курсовая москва курсовые работы в москве
account exchange secure account sales
account buying platform social media account marketplace
account buying platform account store
курсовая онлайн курсовая сколько стоит
курсовик цена цена курсовая
https://t.me/s/official_legzo_legzo/730
accounts market account exchange
account market buy account
account buying service buy accounts
¡Hola buscadores de emociones !
ВїBuscas un bono sin depГіsito en EspaГ±a?
Puedes usar los giros en slots populares como Starburst y Book of Dead https://25girosgratissindeposito.xyz sin coste alguno.
¡Que tengas magníficas recompensas fantásticas !
¡Hola seguidores del casino !
Accede a tiradas gratis sin deposito España y juega en los mejores slots del mercado. Sin tarjetas, sin complicaciones. Solo diversión.​
Algunos jugadores han ganado hasta cientos de euros gracias a los bonos sin depГіsito https://25girosgratissindeposito.xyz y tГє puedes ser el siguiente.
¡Que tengas magníficas tiradas de suerte !