nRF24L01 один из самых популярных беспроводных модулей для интернета вещей (IoT). Подключение модуля nRF24L01+ к Arduino позволит организовать многоканальную защищенную связь между Arduino и устройствами на расстоянии. Рассмотрим, как наладить связь между двумя или несколько плат Ардуино по радиоканалу.
- 1 Установка библиотеки RF24
- 2 Описание методов библиотеки RF24
- 2.1 begin()
- 2.2 startListening()
- 2.3 stopListening()
- 2.4 available()
- 2.5 isAckPayloadAvailable()
- 2.6 read()
- 2.7 write()
- 2.8 writeAckPayload()
- 2.9 openWritingPipe()
- 2.10 openReadingPipe()
- 2.11 closeReadingPipe()
- 2.12 setChannel()
- 2.13 getChannel()
- 2.14 setDataRate()
- 2.15 getDataRate()
- 2.16 setPALevel()
- 2.17 getPALevel()
- 2.18 setCRCLength()
- 2.19 getCRCLength()
- 2.20 disableCRC()
- 2.21 setPayloadSize()
- 2.22 getPayloadSize()
- 2.23 getDynamicPayloadSize()
- 2.24 enableDynamicPayloads()
- 2.25 enableDynamicAck()
- 2.26 enableAckPayload()
- 2.27 setAutoAck()
- 2.28 setAddressWidth()
- 2.29 setRetries()
- 2.30 powerDown()
- 2.31 powerUp()
- 2.32 isPVariant()
- 2.33 writeFast()
- 2.34 writeBlocking()
- 2.35 startFastWrite()
- 2.36 startWrite()
- 2.37 txStandBy()
- 2.38 rxFifoFull()
- 2.39 flush_tx()
- 2.40 reUseTX()
- 2.41 testCarrier()
- 2.42 testRPD()
- 2.43 isValid()
- 3 Схема подключения nRF24L01+ к Arduino
- 4 Примеры
- 5 Материалы
- 6 Похожие записи
Установка библиотеки RF24
Работать с nRF24L01+ можно с помощью библиотеки RF24 — довольно популярная и удобная библиотека. Скачиваем, распаковываем и закидываем библиотеку RF24 в папку Arduino/libraries. В случае, если на момент добавления библиотеки, Arduino IDE была открытой, перезагружаем среду.
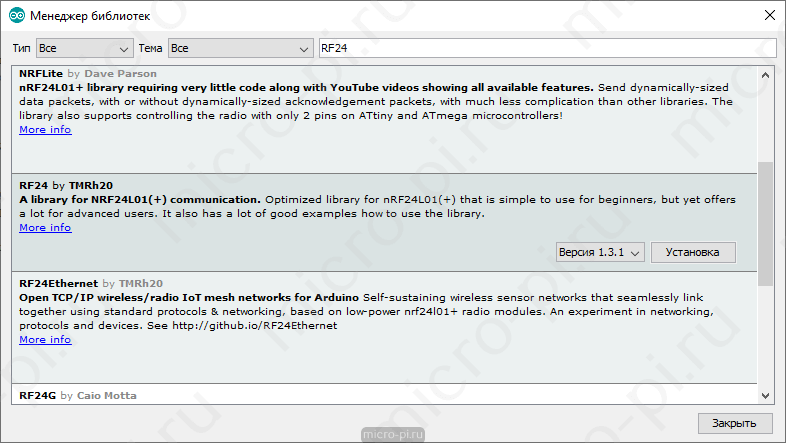
Библиотеку можно установить из самой среды следующим образом:
- В Arduino IDE открываем менеджер библиотек: Скетч->Подключить библиотеку->Управлять библиотеками…
- В строке поиска вводим «RF24», находим библиотеку автора TMRh20, выбираем последнюю версию и кликаем Установить.
- Библиотека установлена (INSTALLED).

Описание методов библиотеки RF24
begin()
Инициализация работы модуля.
bool RF24::begin(void);
Возвращает
bool — результат инициализации (true / false).
startListening()
Начать прослушивание труб, открытых для приёма данных.
void RF24::startListening(void);
stopListening()
Прекратить прослушивание труб и переключиться в режим передатчика.
void RF24::stopListening(void);
available()
Проверить наличие принятых данных доступных для чтения.
bool RF24::available(void); bool RF24::available(uint8_t * pipe_num);
Параметры
pipe_num — адрес переменной типа uint8_t в которую требуется поместить номер трубы по которой были приняты данные.
Возвращает
bool — флаг наличия принятых данных (true / false).
isAckPayloadAvailable()
Проверить передатчиком наличие данных в ответе приёмника.
bool RF24::isAckPayloadAvailable(void);
Возвращает
bool — флаг наличия принятых данных от приёмника (true / false).
read()
Прочитать принятые данные.
void RF24::read(void * buf, uint8_t len);
Параметры
buf — адрес массива, строки или переменной в которую требуется поместить принятые данные.
len — количество байт занимаемое массивом, строкой или переменной в которую требуется поместить принятые данные.
write()
Отправить данные по радиоканалу.
bool RF24::write(const void * buf, uint8_t len, const bool multicast);
Параметры
buf — Данные, адрес массива, строки или переменной, данные которой требуется отправить.
len — Размер отправляемых данных в байтах.
multicast — Флаг групповой передачи, установите в true если требуется отправить данные нескольким приёмникам.
Возвращает
bool — результат доставки данных приёмнику (true / false).
writeAckPayload()
Подготовить данные для ответа передатчику.
void RF24::writeAckPayload(uint8_t pipe, const void * buf, uint8_t len);
Параметры
pipe — Номер трубы передатчика которому требуется ответить данными.
buf — Данные, адрес массива, строки или переменной, данные которой требуется отправить вместе с ответом передатчику.
len — Размер отправляемых данных в байтах.
openWritingPipe()
Открыть трубу для передачи данных.
void RF24::openWritingPipe(uint64_t address);
Параметры
address — Адрес трубы, состоит из 5 байт (по умолчанию) и может быть представлен числом типа uint64_t или массивом из 5 однобайтных элементов. Адрес трубы передатчика должен совпадать с одним из адресов труб приёмника.
openReadingPipe()
Открыть трубу для приёма данных.
void RF24::openReadingPipe(uint8_t number, const uint8_t * address); void RF24::openReadingPipe(uint8_t number, uint64_t address);
Параметры
number — Номер трубы (число от 0 до 5).
address — Адрес трубы, состоит из 5 байт (по умолчанию) и может быть представлен числом типа uint64_t или массивом из 5 однобайтных элементов. Адрес трубы приёмника должен совпадать с адресом трубы передатчика.
closeReadingPipe()
Закрыть трубу открытую ранее для прослушивания (приёма данных).
void RF24::closeReadingPipe(uint8_t pipe):
Параметры
number — Номер трубы (число от 0 до 5), которую более не требуется прослушивать.
setChannel()
Установить радиочастотный канал связи. Номер канала определяет частоту на которой работает модуль. Каждый канал имеет шаг в 1 МГц, а каналу 0 соответствует частота 2,4 ГГц = 2400 МГц, следовательно, каналу 1 соответствует частота 2401 МГц, каналу 2 — частота 2402 МГц и т.д. до канала 125 с частотой 2525 МГц.
void RF24::setChannel(uint8_t channel);
Параметры
channel — Номер канала, указывается числом от 0 до 125.
getChannel()
Получить номер текущего радиочастотного канала связи.
uint8_t RF24::getChannel(void);
Возвращает
Номер канала, число от 0 до 125.
setDataRate()
Установить скорость передачи данных по радиоканалу.
bool RF24::setDataRate(rf24_datarate_e speed);
Параметры
speed — Скорость, задаётся одной из констант: RF24_1MBPS — 1 Мбит/сек, RF24_2MBPS — 2 Мбит/сек и RF24_250KBPS — 250 Кбит/сек (только для модуля NRF24L01+PA+LNA).
Возвращает
Флаг успешной установки новой скорости (true / false).
getDataRate()
Получить текущую скорость передачи данных по радиоканалу.
rf24_datarate_e RF24::getDataRate(void);
Возвращает
значение одной из констант сопоставленной скорости:RF24_1MBPS — 1 Мбит/сек, RF24_2MBPS — 2 Мбит/сек и RF24_250KBPS — 250 Кбит/сек (только для модуля NRF24L01+PA+LNA).
setPALevel()
Установить уровень усиления мощности передатчика.
void RF24::setPALevel(uint8_t level);
Параметры
level — Уровень, задаётся одной из констант:
- RF24_PA_MIN — минимальный уровень усиления = -18 дБм.
- RF24_PA_LOW — низкий уровень усиления = -12 дБм.
- RF24_PA_HIGH — высокий уровень усиления = -6 дБм.
- RF24_PA_MAX — максимальный уровень усиления = 0 дБм.
getPALevel()
Получить текущий уровень усиления мощности передатчика.
uint8_t RF24::getPALevel(void);
Возвращает
значение одной из констант сопоставленной мощности:RF24_PA_MIN — минимальный уровень усиления = -18 дБм.
- RF24_PA_LOW — низкий уровень усиления = -12 дБм.
- RF24_PA_HIGH — высокий уровень усиления = -6 дБм.
- RF24_PA_MAX — максимальный уровень усиления = 0 дБм.
- RF24_PA_ERROR — уровень усиления не определён.
setCRCLength()
Установить размер CRC (циклически избыточный код).
void RF24::setCRCLength(rf24_crclength_e length);
Параметры
length — Размер, задаётся одной из констант: RF24_CRC_8 — под CRC отводится 8 бит (CRC-8) или RF24_CRC_16 — под CRC отводится 16 бит (CRC-16).
getCRCLength()
Получить текущий размер CRC (циклически избыточный код).
rf24_crclength_e RF24::getCRCLength(void);
Возвращает
значение одной из констант сопоставленной размеру CRC: RF24_CRC_8 — под CRC отводится 8 бит (CRC-8), RF24_CRC_16 — под CRC отводится 16 бит (CRC-16) или RF24_CRC_DISABLED — передача и проверка CRC отключены.
disableCRC()
Отключить передачу CRC передатчиком и проверку данных приёмником.
void RF24::disableCRC(void);
setPayloadSize()
Установить статичный размер блока данных пользователя в байтах.
void RF24::setPayloadSize(uint8_t size);
Параметры
size — Размер блока данных пользователя в байтах.
getPayloadSize()
Получить текущий статичный размер блока данных пользователя в байтах.
uint8_t RF24::getPayloadSize(void);
Возвращает
текущий статичный размер блока данных от 0 до 32 байт.
getDynamicPayloadSize()
Получить размер блока данных в последнем принятом пакете.
uint8_t RF24::getDynamicPayloadSize(void);
Возвращает
размер данных последнего принятого пакета в байтах.
enableDynamicPayloads()
Разрешить динамически изменяемый размер блока данных для всех труб.
void RF24::enableDynamicPayloads(void);
enableDynamicAck()
Разрешить отказываться от запроса пакетов подтверждения приёма.
void RF24::enableDynamicAck(void);
enableAckPayload()
Разрешить размещать данные пользователя в пакете подтверждения приёма.
void RF24::enableAckPayload(void);
setAutoAck()
Управление автоматической отправкой пакетов подтверждения приёма данных.
void RF24::setAutoAck(bool enable); void RF24::setAutoAck(uint8_t pipe, bool enable);
Параметры
pipe — номер трубы, для которой разрешается / запрещается автоматическая отправка пакетов подтверждения приема. Указывается только на стороне приёмника. Если номер трубы на стороне приёмника не указан, то действие функции распространяется на все трубы.
enable — Флаг разрешающий автоматическую отправку пакетов подтверждения приёма данных. true — разрешить / false — запретить.
setAddressWidth()
Указать длину адресов труб в байтах.
void RF24::setAddressWidth(uint8_t a_width);
Параметры
a_width — Размер адреса трубы в байтах, представлен числом 3, 4 или 5.
setRetries()
Указать максимальное количество попыток отправки данных и время ожидания.
void RF24::setRetries(uint8_t delay, uint8_t count);
Параметры
delay — целое число от 0 до 15 определяющее время ожидания подтверждения приема.
count — целое число от 1 до 15 определяющее максимальное количество попыток доставить данные передатчику.
powerDown()
Перейти в режим пониженного энергопотребления.
void RF24::powerDown(void);
powerUp()
Выйти из режима пониженного энергопотребления.
void RF24::powerUp(void);
isPVariant()
Проверить аппаратную совместимость модуля с функциями nRF24L01.
bool RF24::isPVariant(void);
Возвращает
(true / false) флаг указывающий на совместимость аппаратного обеспечения модуля с функциями чипа nRF24L01+.
writeFast()
Быстро отправить данные по радиоканалу.
bool RF24::writeFast(const void * buf, uint8_t len); bool RF24::writeFast(const void * buf, uint8_t len, const bool multicast);
Параметры
buf — Данные, адрес массива, строки или переменной, данные которой требуется отправить.
len — Размер отправляемых данных в байтах.
multicast — Флаг групповой передачи, установите в true если требуется отправить данные нескольким приёмникам.
Возвращает
результат записи данных в буфер для передачи (true / false).
writeBlocking()
Быстро отправить данные по радиоканалу с указанием таймаута.
bool RF24::writeBlocking(const void * buf, uint8_t len, uint32_t timeout);
Параметры
buf — Данные, адрес массива, строки или переменной, данные которой требуется отправить.
len — Размер отправляемых данных в байтах.
timeout — Максимальное время ожидания освобождения буфера FIFO в миллисекундах.
Возвращает
результат записи данных в буфер для передачи (true / false).
startFastWrite()
Начать быструю отправку данных.
void RF24::startFastWrite(const void * buf, uint8_t len, const bool multicast, bool startTx = 1);
Параметры
buf — Данные, адрес массива, строки или переменной, данные которой требуется отправить.
len — Размер отправляемых данных в байтах.
multicast — Флаг групповой передачи, установите в true если требуется отправить данные нескольким приёмникам.
startTx — флаг перехода в режим TX или STANDBY-II. Если не указан, значит установлен.
startWrite()
Начать отправку данных.
void RF24::startWrite(const void * buf, uint8_t len, const bool multicast);
Параметры
buf — Данные, адрес массива, строки или переменной, данные которой требуется отправить.
len — Размер отправляемых данных в байтах.
multicast — Флаг групповой передачи, установите в true если требуется отправить данные нескольким приёмникам.
txStandBy()
Подождать пока передаются данные и вернуть результат.
bool RF24::txStandBy(void); bool RF24::txStandBy(uint32_t timeout, bool startTx = 0);
Параметры
timeout — максимальное время ожидания указывается в миллисекундах.
Возвращает
результат передачи данных из буферов FIFO в радиоканал (true / false).
rxFifoFull()
Проверить не заполнены ли все три буфера FIFO.
bool RF24::rxFifoFull(void);
Возвращает
флаг указывающий на то что все буферы FIFO заполнены.
flush_tx()
Очистка буферов FIFO.
uint8_t RF24::flush_tx(void);
reUseTX()
Повторная отправка данных из буфера FIFO, если они там есть.
void RF24::reUseTX(void);
testCarrier()
Проверка наличия несущей частоты на выбранном канале (частоте).
bool RF24::testCarrier(void);
Возвращает
наличие несущей на выбранном канале за все время его прослушивания.
testRPD()
Проверка наличия любого сигнала выше -64 дБм на выбранном канале (частоте).
bool RF24::testRPD(void);
Возвращает
наличие сигнала мощностью выше -64 дБм на выбранном канале за все время его прослушивания.
isValid()
Проверить используется ли модуль или выполняется отладка кода.
bool RF24::isValid(void);
Возвращает
назначение редактируется (true / false).
Схема подключения nRF24L01+ к Arduino
Подключается nRF24L01+ к Arduino по шине SPI (можно использовать как аппаратную так и программную шину). Выводы модуля Vcc и GND подключаются к шине питания 3.3 В постоянного тока. Выводы модуля MISO, MOSI и SCK подключаются к одноименным выводам шины SPI на плате Arduino. Выводы SS (Slave Select) и CE (Chip Enable) назначаются при объявлении объекта библиотеки RF24 и подключаются к любым назначенным выводам Arduino.
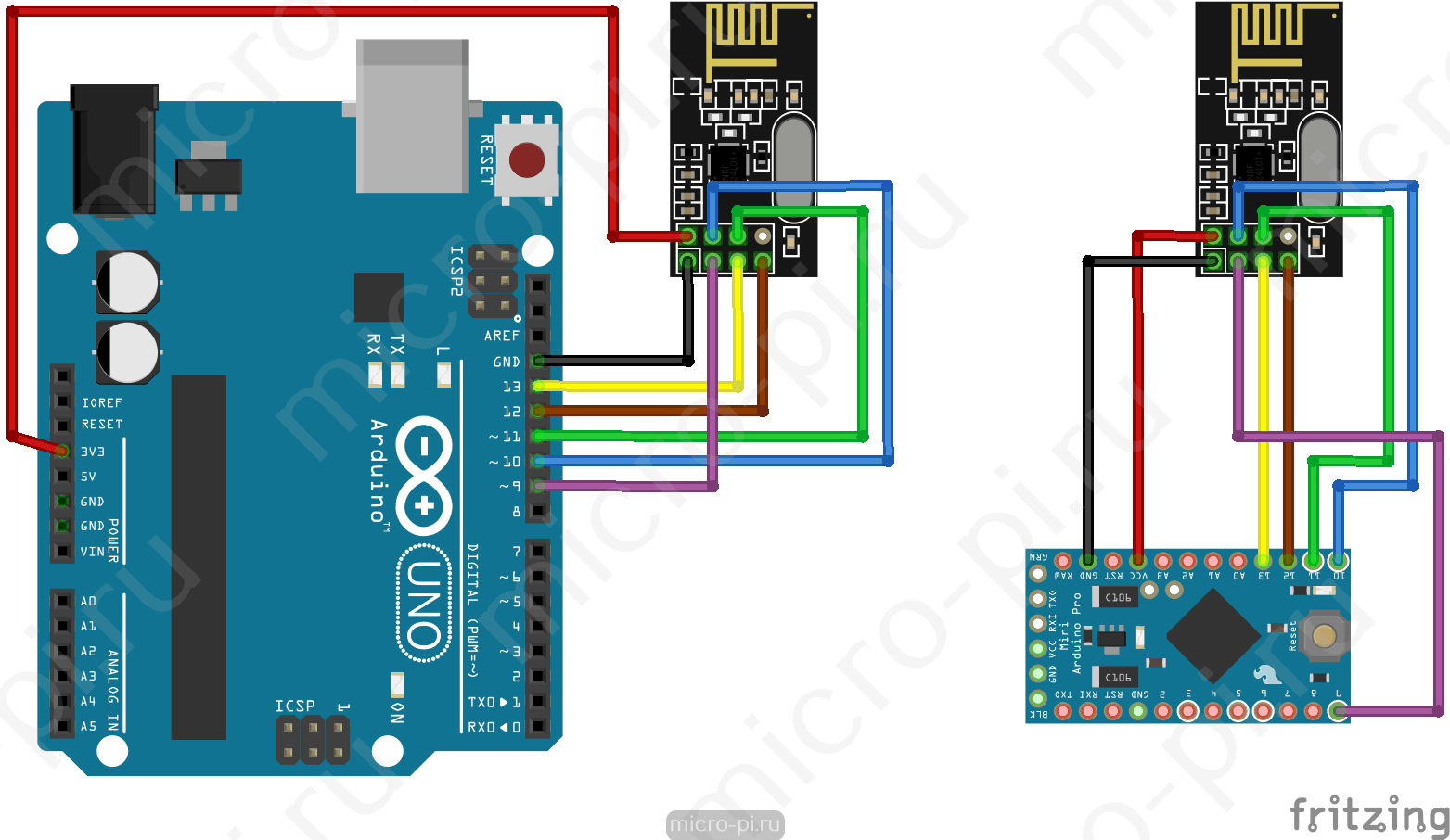
Подключить nRF24L01+ к Arduino можно как напрямую, так и через специальный адаптер.
Подключение nRF24L01+ к Arduino напрямую
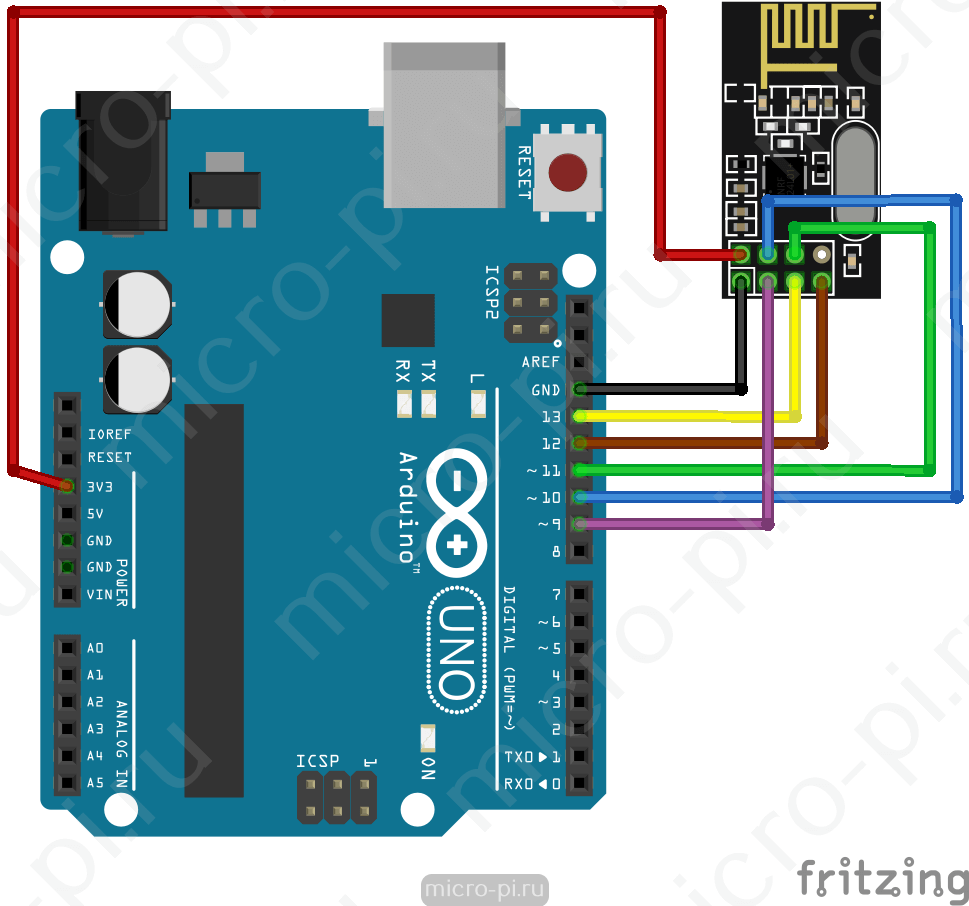
Внимание!
- Необходимо помнить, что модуль работает от 3.3 В и в нем нет защиты от переполюсовки, если не соблюдать два этих правила, можно сжечь модуль!
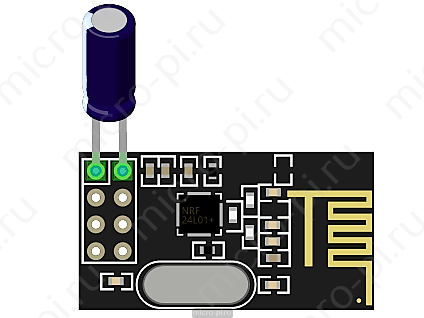
- Для стабильной работы модуля NRF24L01+ необходимо припаять конденсатор на 10 мкФ между VCC и GND.
| nRF24L01+ | Arduino UNO/Pro Mini | Arduino MEGA2560 |
|---|---|---|
| GND | GND | GND |
| VCC | 3.3V | 3.3V |
| CE | 9 | 9 |
| CSN | 10 | 53 |
| SCK | 13 | 52 |
| MOSI | 11 | 51 |
| MISO | 12 | 50 |
| IRQ | — | — |
Подключение nRF24L01+ к Arduino через адаптер
| Адаптер nRF24L01+ | Arduino UNO/Pro Mini | Arduino MEGA2560 |
|---|---|---|
| GND | GND | GND |
| VCC | 5.0V | 5.0V |
| CE | 9 | 9 |
| CSN | 10 | 53 |
| SCK | 13 | 52 |
| MO/MOSI | 11 | 51 |
| MI/MISO | 12 | 50 |
| IRQ | — | — |
Примеры
Пример 1: Проверочный скетч
/*
Подключаем файл настроек из библиотеки RF24.
*/
#include <nRF24L01.h>
/*
Подключаем библиотеку для работы с nRF24L01+.
*/
#include <RF24.h>
#include <printf.h>
/*
Создаём объект radio для работы с библиотекой RF24,
указывая номера выводов модуля (CE, SS).
*/
RF24 radio(7, 10);
void setup() {
/*
Инициируем передачу данных по шине UART в монитор
последовательного порта на скорости 115200 бит/сек.
*/
Serial.begin(115200);
printf_begin();
/*
Инициируем работу модуля nRF24L01+.
*/
radio.begin();
if (radio.isPVariant()) {
/*
Если модуль поддерживается библиотекой RF24,
то выводим текст «Модуль nRF24L01 подключен».
*/
Serial.println("Модуль nRF24L01 подключен");
/*
Дамп конфигурации RF для отладки
*/
radio.printDetails();
} else {
/*
Иначе, если модуль не поддерживается,
то выводи текст «Неизвестный модуль».
*/
Serial.println("Неизвестный модуль");
}
}
void loop() {
}
Результат
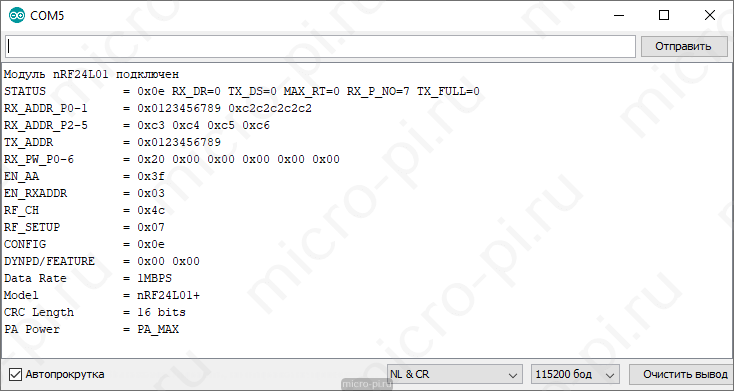
Если после загрузки проверочного скетча увидели, в окне монитора последовательного порта, надпись «Модуль nRF24L01 подключен», значит Ваш модуль поддерживается библиотекой RF24. Если Вы увидели надпись «Неизвестный модуль», проверьте подключение модуля к Arduino. В скетче указано что вывод «CE» (Chip Enable) модуля подключается к выводу 7 Arduino, а вывод SS (Slave Select) модуля подключается к выводу 10 Arduino. При необходимости измените выводы на другие. Если модуль подключён правильно, значит он собран на чипе отличном от nRF24L01.
Пример 2: Передача данных
В функции setup() данного примера модулю задаются основные настройки:
- по умолчанию модуль работает в качестве передатчика;
0x30канал;- скорость 1 Мбит/сек (
RF24_1MBPS); - максимальная мощности (
RF24_PA_MAX); - адрес трубы
0x0123456789LL.
На стороне приёмника нужно указать тот же номер канала, скорость передачи, мощность и адрес трубы.
/*
Подключаем файл настроек из библиотеки RF24
*/
#include <nRF24L01.h>
/*
Подключаем библиотеку для работы с nRF24L01+
*/
#include <RF24.h>
/*
Создаём объект radio для работы с библиотекой RF24,
указывая номера выводов модуля (CE, SS).
*/
RF24 radio(7, 10);
/*
Объявляем массив для хранения и передачи данных
(до 32 байт включительно).
*/
int dataToBeTransmitted[5] = {'0', '1', '2', '3', '4'};
void setup() {
/*
Инициируем работу nRF24L01+
*/
radio.begin();
/*
Указываем канал передачи данных (от 0 до 127)
(на одном канале может быть только 1 приёмник и до 6 передатчиков).
Выбираем канал в котором нет шумов!
*/
radio.setChannel(0x30);
/*
Указываем скорость передачи данных
RF24_250KBPS = 250Кбит/сек
RF24_1MBPS = 1Мбит/сек
RF24_2MBPS = 2Мбит/сек
Скорость должна быть одинакова на приёмнике и передатчике.
При самой низкой скорости имеем самую высокую чувствительность и дальность.
*/
radio.setDataRate(RF24_1MBPS);
/*
Указываем мощность передатчика
RF24_PA_MIN=-18dBm
RF24_PA_LOW=-12dBm
RF24_PA_HIGH=-6dBm
RF24_PA_MAX=0dBm
*/
radio.setPALevel(RF24_PA_MAX);
/*
Открываем трубу с адресом 0x0123456789LL для передачи данных
(передатчик может одновременно вещать только по одной трубе).
*/
radio.openWritingPipe(0x0123456789LL);
}
void loop() {
/*
Отправляем данные из массива dataToBeTransmitted
указывая весь размер массива в байтах.
*/
radio.write(&dataToBeTransmitted, sizeof(dataToBeTransmitted));
/*
Устанавливаем задержку на 1000 мс.
*/
delay(1000);
}
Пример 3: Получение данных от одного передатчика
В коде setup() приёмника задаются такие же настройки как и передатчику (канал, скорость, мощность передатчика).
0x30канал;- скорость 1 Мбит/сек (
RF24_1MBPS); - максимальная мощности (
RF24_PA_MAX); - адрес трубы
0x0123456789LL, для приёма данных.
Чтобы включить прослушивание труб, нужно вызвать startListening(), метод переводит модуль в режим работы приёмника. Если далее вызвать stopListening(), то модуль перейдёт в режим работы передатчика.
/*
Подключаем файл настроек из библиотеки RF24
*/
#include <nRF24L01.h>
/*
Подключаем библиотеку для работы с nRF24L01+
*/
#include <RF24.h>
/*
Создаём объект radio для работы с библиотекой RF24,
указывая номера выводов модуля (CE, SS).
*/
RF24 radio(7, 10);
/*
Объявляем массив для хранения и передачи данных
(до 32 байт включительно).
*/
int receivedData[5];
/*
Объявляем переменную в которую будет сохраняться
номер трубы по которой приняты данные.
*/
uint8_t pipe;
uint8_t i;
void setup() {
/*
Инициируем передачу данных по шине UART в монитор
последовательного порта на скорости 115200 бит/сек.
*/
Serial.begin(115200);
/*
Инициируем работу nRF24L01+
*/
radio.begin();
/*
Указываем канал передачи данных (от 0 до 127)
(на одном канале может быть только 1 приёмник и до 6 передатчиков).
Выбираем канал в котором нет шумов!
*/
radio.setChannel(0x30);
/*
Указываем скорость передачи данных
RF24_250KBPS = 250Кбит/сек
RF24_1MBPS = 1Мбит/сек
RF24_2MBPS = 2Мбит/сек
Скорость должна быть одинакова на приёмнике и передатчике.
При самой низкой скорости имеем самую высокую чувствительность и дальность.
*/
radio.setDataRate(RF24_1MBPS);
/*
Указываем мощность передатчика
RF24_PA_MIN=-18dBm
RF24_PA_LOW=-12dBm
RF24_PA_HIGH=-6dBm
RF24_PA_MAX=0dBm
*/
radio.setPALevel(RF24_PA_MAX);
/*
Открываем 1 трубу с адресом 1 передатчика 0x0123456789LL, для приема данных.
*/
radio.openReadingPipe(1, 0x0123456789LL);
/*
Включаем приемник, начинаем прослушивать открытые трубы.
*/
radio.startListening();
}
void loop() {
/*
Если в буфере имеются принятые данные, то получаем номер трубы
по которой эти данные пришли в переменную pipe.
*/
if (radio.available(&pipe)) {
/*
Читаем данные из буфера в массив receivedData указывая
сколько всего байт может поместиться в массив.
*/
radio.read(&receivedData, sizeof(receivedData));
/*
Если данные пришли от 1 передатчика (по 1 трубе),
то можно выполнить соответствующее действие ...
*/
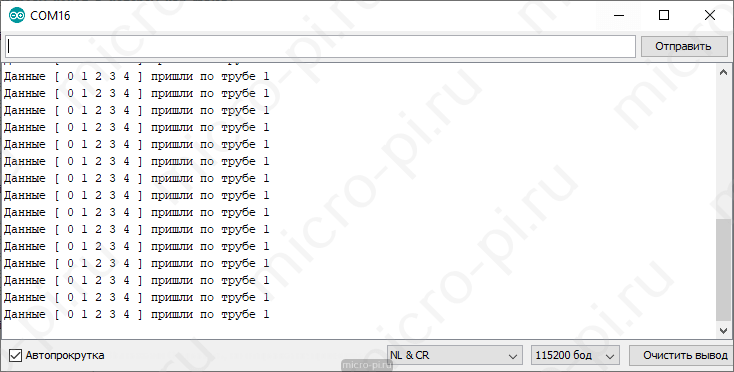
Serial.print("Данные [ ");
for (i = 0; i < 5; i++) {
Serial.print((char) receivedData[i]);
Serial.print(' ');
}
Serial.print("] пришли по трубе ");
Serial.println(pipe);
}
}
Результат
Пример 4: Передача данных с проверкой их доставки
/*
Подключаем файл настроек из библиотеки RF24
*/
#include <nRF24L01.h>
/*
Подключаем библиотеку для работы с nRF24L01+
*/
#include <RF24.h>
/*
Создаём объект radio для работы с библиотекой RF24,
указывая номера выводов модуля (CE, SS).
*/
RF24 radio(7, 10);
/*
Объявляем массив для хранения и передачи данных
(до 32 байт включительно).
*/
uint8_t dataToBeTransmitted[5] = {'0', '1', '2', '3', '4'};
void setup() {
/*
Инициируем передачу данных по шине UART в монитор
последовательного порта на скорости 115200 бит/сек.
*/
Serial.begin(115200);
/*
Инициируем работу nRF24L01+
*/
radio.begin();
/*
Указываем канал передачи данных (от 0 до 127)
(на одном канале может быть только 1 приёмник и до 6 передатчиков).
Выбираем канал в котором нет шумов!
*/
radio.setChannel(0x30);
/*
Указываем скорость передачи данных
RF24_250KBPS = 250Кбит/сек
RF24_1MBPS = 1Мбит/сек
RF24_2MBPS = 2Мбит/сек
Скорость должна быть одинакова на приёмнике и передатчике.
При самой низкой скорости имеем самую высокую чувствительность и дальность.
*/
radio.setDataRate(RF24_1MBPS);
/*
Указываем мощность передатчика
RF24_PA_MIN=-18dBm
RF24_PA_LOW=-12dBm
RF24_PA_HIGH=-6dBm
RF24_PA_MAX=0dBm
*/
radio.setPALevel(RF24_PA_MAX);
/*
Открываем трубу с адресом 0x0123456789LL для передачи данных
(передатчик может одновременно вещать только по одной трубе).
*/
radio.openWritingPipe(0x0123456789LL);
}
void loop() {
/*
Отправляем данные из массива dataToBeTransmitted
указывая весь размер массива в байтах.
*/
if (radio.write(&dataToBeTransmitted, sizeof(dataToBeTransmitted))) {
/*
Данные передатчика были корректно приняты приёмником
*/
Serial.println("Данные были корректно приняты приёмником");
} else {
/*
Данные передатчика не приняты или дошли с ошибкой CRC
*/
Serial.println("Данные не приняты или дошли с ошибкой CRC");
}
/*
Устанавливаем задержку на 1000 мс.
*/
delay(1000);
}
Результат
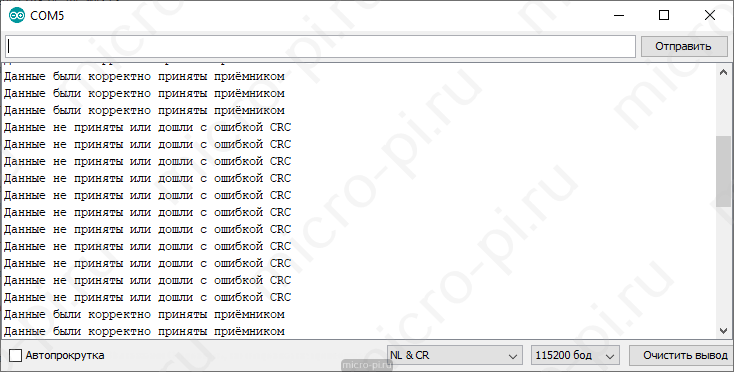 Скетч данного примера отличается от предыдущего только кодом loop() где функция write() вызывается в условии оператора if(). Дело в том, что функция write() не только отправляет данные, но и возвращает true (если данные были доставлены) или false (если данные не доставлены). По умолчанию передача данных реализована так, что передатчик не только отправляет данные, но и запрашивает у приёмника подтверждение их получения, а приёмник получив данные и проверив CRC, возвращает передатчику пакет подтверждения приема данных. Таким образом на стороне передатчика можно контролировать факт доставки данных приёмнику.
Скетч данного примера отличается от предыдущего только кодом loop() где функция write() вызывается в условии оператора if(). Дело в том, что функция write() не только отправляет данные, но и возвращает true (если данные были доставлены) или false (если данные не доставлены). По умолчанию передача данных реализована так, что передатчик не только отправляет данные, но и запрашивает у приёмника подтверждение их получения, а приёмник получив данные и проверив CRC, возвращает передатчику пакет подтверждения приема данных. Таким образом на стороне передатчика можно контролировать факт доставки данных приёмнику.
Если не нужно определить факт доставки данных приёмнику, можете заменить write() на writeFast().
/* Отправляем данные из массива dataToBeTransmitted указывая сколько байт массива мы хотим отправить. */ radio.writeFast(&dataToBeTransmitted, sizeof(dataToBeTransmitted));
writeFast() принимает те же параметры что и write(), но возвращает не флаг доставки данных приёмнику, а флаг записи данных в буфер FIFO. Значит в большинстве случаев функция вернёт true даже до того как приёмник получит данные. Если же все три буфера FIFO заполнены, то функция writeFast() ждёт пока один из них не освободится или пока не истечёт время таймаута но и это ожидание на порядок меньше чем у функции write().
Запретить отправку пакетов подтверждения приёма можно и на стороне приёмников, вызвав у них функцию setAutoAck(false) или setAutoAck(номер_трубы, false). Но в таком случае и на стороне передатчика нужно вызвать функцию setAutoAck(false) иначе приёмник не будет понимать что ему прислал передатчик.
Пример 5: Получение данных от одного или нескольких передатчиков
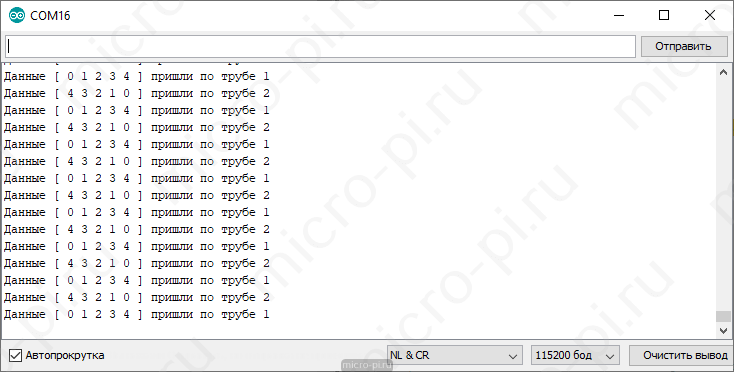
Приёмнику можно задать до 6 труб функцией openReadingPipe(номер, адрес) с номерами труб от 0 до 5 и адресами труб совпадающими с адресами труб передатчиков.
/*...*/ radio.openReadingPipe(0, 0x0123456789LL); radio.openReadingPipe(1, 0x0123456799LL); radio.openReadingPipe(2, 0x012345679ALL); radio.openReadingPipe(3, 0x01234567AALL); radio.openReadingPipe(4, 0x01234567ABLL); radio.openReadingPipe(5, 0x01234567BBLL); /*...*/
Сколько труб Вы укажете, столько передатчиков будет слушать приёмник.
Методом available() осуществляется проверка получения данных. Метод возвращает true если в буфере есть принятые данные доступные для чтения. В качестве необязательного аргумента можно указать адрес переменной в которую будет помещён номер трубы по которой были приняты данные (в примере используется адрес переменной &pipe), зная номер трубы мы знаем от какого передатчика пришли данные.
if(radio.available(&pipe)) {
/*...*/
}
Если приемник будет принимать данные только от одного передатчика, то переменную pipe можно не использовать, а метод available() можно вызвать без параметра, так как в этом случае не требуется узнавать от какого передатчика приняты данные.
/*
Подключаем файл настроек из библиотеки RF24
*/
#include <nRF24L01.h>
/*
Подключаем библиотеку для работы с nRF24L01+
*/
#include <RF24.h>
/*
Создаём объект radio для работы с библиотекой RF24,
указывая номера выводов модуля (CE, SS).
*/
RF24 radio(7, 10);
/*
Объявляем массив для хранения и передачи данных
(до 32 байт включительно).
*/
uint8_t receivedData[5];
/*
Объявляем переменную в которую будет сохраняться
номер трубы по которой приняты данные.
*/
uint8_t pipe;
uint8_t i;
void setup() {
/*
Инициируем передачу данных по шине UART в монитор
последовательного порта на скорости 115200 бит/сек.
*/
Serial.begin(115200);
/*
Инициируем работу nRF24L01+
*/
radio.begin();
/*
Указываем канал передачи данных (от 0 до 127)
(на одном канале может быть только 1 приёмник и до 6 передатчиков).
Выбираем канал в котором нет шумов!
*/
radio.setChannel(0x30);
/*
Указываем скорость передачи данных
RF24_250KBPS = 250Кбит/сек
RF24_1MBPS = 1Мбит/сек
RF24_2MBPS = 2Мбит/сек
Скорость должна быть одинакова на приёмнике и передатчике.
При самой низкой скорости имеем самую высокую чувствительность и дальность.
*/
radio.setDataRate(RF24_1MBPS);
/*
Указываем мощность передатчика
RF24_PA_MIN=-18dBm
RF24_PA_LOW=-12dBm
RF24_PA_HIGH=-6dBm
RF24_PA_MAX=0dBm
*/
radio.setPALevel(RF24_PA_MAX);
/*
Открываем 1 трубу с адресом 1 передатчика 0x0123456789LL, для приема данных.
*/
radio.openReadingPipe(1, 0x0123456789LL);
/*
Открываем 2 трубу с адресом 2 передатчика 0x0123456799LL, для приема данных.
*/
radio.openReadingPipe(2, 0x0123456799LL);
/*
Включаем приемник, начинаем прослушивать открытые трубы.
*/
radio.startListening();
}
void loop() {
/*
Если в буфере имеются принятые данные, то получаем номер трубы
по которой эти данные пришли в переменную pipe.
*/
if (radio.available(&pipe)) {
/*
Читаем данные из буфера в массив receivedData указывая
сколько всего байт может поместиться в массив.
*/
radio.read(&receivedData, sizeof(receivedData));
/*
Если данные пришли от 1 передатчика (по 1 трубе),
то можно выполнить соответствующее действие ...
*/
Serial.print("Данные [ ");
for (i = 0; i < 5; i++) {
Serial.print((char) receivedData[i]);
Serial.print(' ');
}
Serial.print("] пришли по трубе ");
Serial.println(pipe);
}
}
Результат
Материалы
Радио модуль NRF24L01+ / PA+LNA 2.4G (Trema-модуль V2.0)
Урок 26.4 Соединяем две arduino по радиоканалу через nRF24L01+
Optimized High Speed NRF24L01+ Driver Class Documenation
Спасибо за описание методов. Только здесь нашел.
В примере 4 тип данных для отправки uint8_t, а в примере 3 тип данных для приема int. Несколько неожиданно, когда принимается не совсем то что отправляется. ))
Да, нужно отправить/получать используя один тип данных, лучше всего использовать
uint8_t, но можно использовать любой тип данных, к примеру вам нужно отправитьintилиdoubleи не хотите вручную преобразовать из 4-хuint8_tвint.вместо RF24 radio(7, 10); должно быть RF24 radio(9, 10);
абсолютно не обязательно, у меня работают 7, 8.
Вовсе не обязательно. Это зависит от того, к каким выводам Ардуино подведены сигналы ce и csn радиомодуля.
Спасибо большое! Реально только здесь нашел информацию. Хотелось бы еще увидеть пример с переключением с приема на передачу и обратно.
Всегда интересно было, какая каша в голове у тех, кто схему проводками рисует, цветными. Даже на принципиальной схеме разбирать всё это невозможно. При этом распиновку самого модуля не показали..
Appreciation to my father who informed me regarding this website, this blog
is in fact amazing.
https://boost.en-nitricboost.us
get cheap duphalac
Incredible Blog Entry
Gosh , what an perceptive and contemplative work !
I stumbled upon myself nodding along as I perused through your dissection
of this vital topic .
Your contentions were thoroughly investigated and presented in a lucid, persuasive manner.
I specifically valued how you were empowered to extract
the essential intricacies and intricacies at play , excluding oversimplifying
or overlooking the hurdles.
This write-up has offered me a great deal to reflect on .
You’ve definitively enlarged my comprehension and transformed my mindset
in particular profound ways .
Thank you for devoting the resources to share your mastery on this matter .
Entries like this are extremely a priceless contribution to the
discussion . I await with excitement witnessing what other thought-provoking data you have
in reserve .
Here is my webpage :: login to ebet
Have you ever thought about writing an ebook or guest authoring
on other websites? I have a blog centered on the same information you discuss and would really like to have you share some stories/information. I know my readers would enjoy
your work. If you are even remotely interested, feel free to send me an e-mail.
My site — the growth matrix xxx
It’s enormous that you are getting ideas from this piece of writing as well as from
our discussion made here.
My blog … does tonic greens cure herpes
Your mode of describing the whole thing in this paragraph is genuinely nice,
all can without difficulty be aware of it, Thanks a lot.
Also visit my homepage … the growth matrix cock
Usually I don’t learn article on blogs, but I would like to say that this write-up very compelled me to try
and do so! Your writing taste has been surprised me.
Thank you, quite great article.
My web site … lung clear pro review
hello there and thank you for your information – I’ve definitely picked up anything new
from right here. I did however expertise some technical points using this
site, as I experienced to reload the website a lot of times previous to I could
get it to load properly. I had been wondering if your web
hosting is OK? Not that I’m complaining, but sluggish loading
instances times will often affect your placement in google and could damage your high
quality score if advertising and marketing with Adwords.
Well I am adding this RSS to my email and could look out for much more of your respective interesting content.
Ensure that you update this again very soon.
my web blog :: dentavim does it work
can i get cheap stromectol for sale
Way cool! Some very valid points! I appreciate you writing this post and also the
rest of the site is also really good.
My web blog :: go boostaro ingredients list
WOW just what I was looking for. Came here by searching for tonic greens and herpes
Here is my webpage: tonic greens cure
can i purchase cheap tetracycline without insurance
Go88 la cong game doi thuong truc tuyen so 1 Viet Nam hien nay voi hon 2 trieu nguoi choi moi ngay tai trang chu Go88 COM. Go88 cung cap kho game phong phu.
Website: https://go88.run/
buying generic deltasone tablets
It’s nearly impossible to find well-informed
people for this topic, but you seem like you know what you’re
talking about! Thanks
my blog post potent stream reviews and complaints
Perfectly voiced indeed. .
Having read this I thought it was extremely enlightening.
I appreciate you finding the time and energy to put
this short article together. I once again find myself spending way too much time both reading
and commenting. But so what, it was still worthwhile!
Thanks a lot, A lot of information.
great issues altogether, you just won a logo new reader.
What would you recommend in regards to your post that you made a few days in the past?
Any sure?
Feel free to surf to my site item648153073
Heya! I’m at work surfing around your blog from my new
apple iphone! Just wanted to say I love reading your blog and look forward
to all your posts! Carry on the fantastic work!
Here is my site :: nervovive reviews and complaints
It’s not my first time to pay a quick visit this web
page, i am visiting this web page dailly and get pleasant data
from here everyday.
Have a look at my website; fitspresso website
how to get pregabalin pills
Spot on with this write-up, I absolutely believe this website needs a
great deal more attention. I’ll probably be returning to read through
more, thanks for the advice!
Take a look at my web page — the growth matrix gm
May I simply just say what a comfort to discover someone who genuinely knows what
they’re discussing on the web. You certainly understand how to bring a
problem to light and make it important. More people
have to read this and understand this side of the story.
It’s surprising you’re not more popular since you definitely have
the gift.
Your mode of describing all in this piece of writing is in fact pleasant, all be able to easily know it,
Thanks a lot.
My webpage … prodentim coupon code
Its like you read my mind! You seem to know so much about this, like you wrote the book in it or something.
I think that you could do with some pics to drive the message home a bit,
but other than that, this is magnificent blog. An excellent read.
I’ll definitely be back.
my page … the growth-share matrix
Как поднять настроение подруге с помощью прикольного анекдота
Как поднять настроение другу с помощью смешного анекдота
Как поднять настроение другу с помощью прикольного анекдота
Simply wish to say your article is as astonishing. The clarity
in your post is just spectacular and i could assume you are an expert on this subject.
Well with your permission allow me to grab your RSS feed to keep
updated with forthcoming post. Thanks a million and please continue the enjoyable work.
Here is my web-site; growth matrix male enhancement
Hello to every one, as I am actually keen of reading this website’s post to
be updated daily. It contains fastidious material.
Also visit my web blog; prodentim reviews
where to buy generic doxycycline tablets
can i order valtrex tablets
Как улучшить настроение подруге с помощью смешных картинок и мемов https://anekdotymemy.wordpress.com/2024/09/16/podnat-nastroenie/
Как поднять настроение другу с помощью шутки https://anekdotymemy.wordpress.com/2024/09/16/podnat-nastroenie/
Как поднять настроение подруге с помощью анекдота https://anekdotymemy.wordpress.com/2024/09/16/podnat-nastroenie/
Как поднять настроение подруге с помощью смешных картинок и мемов https://anekdotymemy.wordpress.com/2024/09/16/podnat-nastroenie/
Как поднять настроение подруге с помощью шутки https://anekdotymemy.wordpress.com/2024/09/16/podnat-nastroenie/
get generic prednisone no prescription
get generic keflex without insurance
Greate article. Keep posting such kind of information on your blog.
Im really impressed by your blog.
Hello there, You have done a fantastic job. I’ll certainly digg it and
individually recommend to my friends. I am confident they’ll be benefited
from this web site.
Feel free to surf to my blog does alpha bites work really
Что такое смешные картинки и как они появились
Что такое мемы и как они появились
how to get cheap actos without a prescription
Heya i am for the first time here. I came across this board and
I find It truly useful & it helped me out a lot.
I hope to give something back and help others like you helped me.
My web-site; tonic greens customer reviews
Hello There. I found your blog using msn. This is a very well written article.
I’ll make sure to bookmark it and come back to read
more of your useful information. Thanks for the post. I will certainly
comeback.
Feel free to surf to my website — tonic greens customer service number
What’s up it’s me, I am also visiting this website daily, this web site is truly nice and the visitors are in fact sharing
pleasant thoughts.
Feel free to visit my site … tonic greens facebook
Wonderful blog! I found it while browsing on Yahoo News. Do you have
any tips on how to get listed in Yahoo News? I’ve been trying
for a while but I never seem to get there! Many thanks
My blog post tonic greens work
I am genuinely delighted to read this web site posts
which contains lots of useful data, thanks for providing such information.
Visit my web blog do tonic greens work
прикольные картинки в приложении
Всё шуточки
Смешные анекдоты в приложении
Всё шуточки
прикольные анекдоты в приложении
Всё шуточки
can you buy cheap fulvicin prices
การ เสี่ยง «หวยฮานอย» เป็นอีก โอกาส
หนึ่งที่ได้รับ ความหลงใหล จาก คนในสังคมไทย
ในการเสี่ยงโชค เมื่อ เปรียบเทียบ
การ พนัน หวยรัฐบาลหรือ»หวยลาว» ความ
น่าดึงดูด ของ»หวยฮานอย»คือ การ จัดรางวัล
ทุกวัน ส่งผลให้ผู้
เสี่ยง สามารถ คว้า ได้บ่อยครั้ง และ มีทางเลือก สร้าง รายได้เสริม
จากการเล่น หวย
อย่างไรก็ตาม การ ซื้อ
«หวยฮานอย» ก็ไม่ ข้อเสีย เนื่องจากผู้ ทำ บางรายอาจ เสี่ยง มากเกินไปหรือ มุ่งหมาย
การพนัน ซึ่งอาจ ส่งผลเสียตามมา ต่อ
ความสัมพันธ์ นอกจากนี้ ยังมีความเสี่ยง เรื่อง การหลอกลวง จากผู้ที่แสวงหาประโยชน์
โดยมิชอบ
เพื่อให้การ ทำ «หวยฮานอย» เป็นเพียงการ เล่นเพื่อความสนุก เพื่อ ความเพลิดเพลิน
และ ไม่ส่งผลกระทบ จึงควรมีการควบคุม และ ควบคุม อย่างใกล้ชิด
เช่น การ ตั้ง กรอบเวลา ในการ ซื้อ ที่ เพียงพอ
รวมถึงการตรวจสอบ ผู้ ทำผิด ทั้งนี้เพื่อให้การ ลุ้น
«หวยฮานอย» เป็นส่วนหนึ่งของการ ใช้เวลา อย่าง มีจิตสำนึก
และ ไม่ทำให้เดือดร้อน ผู้อื่น ของผู้ ซื้อ
Here is my web-site :: เว็บหวยออนไลน์
Что такое анекдот? Почему мы любим прикольные анекдоты? Как они появились? Читайте об этом
статью
Thank you for every other informative site. The place else may I get
that kind of information written in such a perfect method?
I’ve a undertaking that I’m simply now working on,
and I’ve been at the glance out for such info.
Here is my webpage: alpha bites real review
Что такое анекдот? Почему мы любим прикольные анекдоты? Как они появились? Читайте об этом
статью
Что такое анекдот? Почему мы любим прикольные анекдоты? История. Читайте об этом
статью
Что такое анекдот? Почему мы любим прикольные анекдоты? История. Читайте об этом
статью
Have you ever considered about including a little bit more than just your articles?
I mean, what you say is important and all. But think about if
you added some great visuals or video clips to give
your posts more, «pop»! Your content is excellent but with
pics and video clips, this website could definitely be one of the greatest in its
niche. Very good blog!
Also visit my blog post … fitspresso buy
Hello would you mind sharing which blog platform you’re working with?
I’m looking to start my own blog in the near future but I’m having a difficult time choosing between BlogEngine/Wordpress/B2evolution and Drupal.
The reason I ask is because your layout seems different
then most blogs and I’m looking for something unique.
P.S Apologies for getting off-topic but I had to ask!
My web blog :: is the genius wave a scam
I got this web page from my pal who told me on the
topic of this website and now this time I am browsing this web site and reading
very informative articles or reviews at this time.
Have a look at my web blog — genius wave
เรา ครับ อ่านบล็อกนี้ และรู้สึกตื่นเช้า มาก!
เรื่องเล่า ที่น่าสนใจพร้อมกับ รายละเอียดอันที่
ครบถ้วน ทำให้ผมได้รับความรู้ ใหม่ๆ มากมาย ผมชอบกลวิธี ที่คุณวิเคราะห์ ประเด็นต่างๆ อย่างละเอียดถี่ถ้วน และชี้ให้เห็น แนวคิดที่น่าสนใจ ผมเห็นด้วยในความเห็น หลายจุดที่คุณกล่าวถึง และมองว่าเป็นเรื่องอันที่สำคัญและควรได้รับการตรวจสอบ อย่างลึกซึ้ง
นอกจากนี้ ผมยังชอบ ความทันสมัย ในการนำเสนอ เนื้อหา ภาษา ที่ใช้เข้าใจง่าย และการนำเสนอ ที่น่าสนใจ เพราะ
อ่านแล้วไม่รู้สึกง่วงนอน เป็นบล็อกที่ทรงพลัง และน่าติดตามเป็นพิเศษ
ขอบคุณ ที่แบ่งปันข้อมูล และมุมมอง ที่น่าสนใจ
ผมรอตั้งหน้าตั้งตา ที่จะอ่านบทความใหม่ๆ
ของคุณในครั้งต่อไป และหวังว่าจะได้ได้โอกาส พูดคุย ความรู้สึก กับคุณเช่นเดียวกัน
Feel free to surf to my web-site: หวยออนไลน์24th
Howdy just wanted to give you a quick heads up.
The text in your article seem to be running off the screen in Firefox.
I’m not sure if this is a formatting issue or something to
do with browser compatibility but I thought I’d post to let you know.
The design look great though! Hope you get the issue
solved soon. Many thanks
Here is my webpage :: slim boost tea side effects
Usually I do not read post on blogs, however I would like to say that this write-up very pressured me to take a
look at and do so! Your writing style has been amazed me.
Thanks, very great article.
Review my web-site: slim boost tea reviews
Hey there! Do you know if they make any plugins
to help with SEO? I’m trying to get my blog to rank for some targeted keywords but I’m not seeing very good results.
If you know of any please share. Appreciate it!
my blog post — the genius wave reviews
Now I am going away to do my breakfast, afterward having
my breakfast coming over again to read more news.
my homepage: slim boost tea reviews
This info is invaluable. How can I find out more?
Take a look at my web page: testoprim d precio farmacia benavides
After looking into a number of the blog articles on your web page, I seriously like your technique of blogging.
I saved as a favorite it to my bookmark website list and will be checking back in the near future.
Please visit my website too and tell me what you think.
Look into my web-site clear lung pro reviews
Great post. I used to be checking constantly this blog and
I am impressed! Extremely helpful information specially the ultimate
phase 🙂 I handle such info much. I used to be looking for this particular information for a long time.
Thank you and good luck.
Here is my webpage; is tonic greens fda approved
Howdy! This post couldn’t be written much better!
Reading through this article reminds me of my previous roommate!
He constantly kept preaching about this. I most certainly will send this article to him.
Pretty sure he will have a very good read. Thanks for sharing!
my homepage … the growth matrix real or fake
Hello, this weekend is good in support of me, because this time i am reading this
wonderful educational piece of writing here at my residence.
My web-site :: in the growth-share matrix
รับประสบการณ์ pokdeng ออนไลน์ที่ดีที่สุดกับ pokdeng ออนไลน์!
สนุกตื่นเต้นไปกับเกมโปเกม่อนแบบเรียลไทม์กับผู้เล่นจากทั่วประเทศไทย
ความสนุกในการเล่นเกมนับพันชั่วโมงรอคุณอยู่ เข้าร่วมเลยตอนนี้
Have a look at my website — คาสิโนออนไลน์ที่ดีที่สุด
Hey! This is my 1st comment here so I just wanted to give a quick shout
out and say I really enjoy reading your articles. Can you recommend any other blogs/websites/forums that
go over the same topics? Thanks for your time!
my blog the growth matrix step by step youtube reddit
A person necessarily assist to make significantly posts I might state.
This is the very first time I frequented your website page and so far?
I amazed with the analysis you made to make this particular
put up extraordinary. Magnificent process!
my blog post the dick growth matrix
hello!,I love your writing so much! percentage we keep in touch more approximately your post on AOL?
I need a specialist in this space to unravel my problem.
Maybe that is you! Taking a look forward to look you.
My blog post: renew weight loss pills
Quality posts is the crucial to attract the people to go to see the
web page, that’s what this website is providing.
Also visit my webpage … LipoZem Ingredients
First off I want to say terrific blog! I had a quick
question in which I’d like to ask if you don’t mind.
I was interested to know how you center yourself and clear your head before writing.
I have had a hard time clearing my mind in getting my ideas out.
I do enjoy writing however it just seems like the first 10 to 15 minutes are wasted just trying to figure out how to begin. Any suggestions or hints?
Appreciate it!
Feel free to visit my web-site best lottery defeated software free
Very nice post. I just stumbled upon your weblog and wished to say that
I have really enjoyed surfing around your
blog posts. In any case I will be subscribing to your feed and I hope you write again soon!
Also visit my web blog; renew weight loss pills
Hi, I do think this is a great website. I stumbledupon it 😉 I
may come back yet again since I book-marked it. Money
and freedom is the best way to change, may you be rich and continue to help others.
Take a look at my blog post billionaire brain wave free
Hello, i believe that i saw you visited my blog thus i got here to return the want?.I’m trying to in finding things to improve
my site!I assume its adequate to use some of your concepts!!
My blog renew weight loss
Excellent, what a website it is! This blog gives valuable facts to
us, keep it up.
My website … emperors vigor tonic review
The world of rigorous gaming has undergone a remarkable transformation in recent years, with the rise of esports as a global phenomenon .
Amidst this rapidly developing landscape, one
name has emerged as a trailblazer – Spade Gaming.
Spade Gaming is a might to be reckoned with, a gaming entity that has carved out a unique niche for itself by
blending cutting-edge invention , strategic
outlook , and a unyielding commitment to prowess.
Established with the goal of reimagining the
boundaries of rigorous gaming, Spade Gaming has quickly become a
symbol of ingenuity , driving the landscape forward with its unconventional approach and unyielding dedication.
At the center of Spade Gaming’s success lies its resolute commitment on performer development and crew building.
The company has cultivated an environment that
supports and supports its individuals, providing them with the equipment
, training , and assistance they need to reach
new summits .
But Spade Gaming’s leverage extends far past the confines of the game by itself .
The enterprise has also positioned itself as a trailblazer in the
sphere of reporting creation, harnessing its
comprehensive stockpile of exceptional experts to
manufacture enthralling and gripping coverage that resonates among aficionados covering the planet .
In addition , Spade Gaming’s loyalty to civic obligation and public engagement distinguishes
it distinct from its competitors . The organization has utilized
its megaphone to promote vital campaigns ,
leveraging its significance and standing to foster
a substantial mark in the sphere of esports and encompassing more .
As the competitive gaming industry presses forward to
develop , Spade Gaming looms as a gleaming example of what can be
realized when foresight , freshness, and a
unyielding quest of prowess converge .
In the years to follow , as the realm of competitive
gaming soldiers on to enchant audiences
and redefine the way we immerse with recreation , Spade Gaming will
without a doubt continue at the frontier , directing the crusade and building
a trailblazing age in the perpetually morphing
realm of esports.
Also visit my blog :: online sports betting [https://www.popsugar.com/profile/ownerdoubt2]
ความปรารถนา ในการ ลุ้น
«หวยลาว» เป็นหนึ่งในกิจกรรมยอดนิยมในประเทศไทย โดยผู้คนจำนวนมากมักจะหลงใหล ในการ ลุ้น ด้วยความหวังที่จะได้รับ โชคลาภ และ
ปรับปรุง ชีวิตของตนเอง
«หวยลาว» เป็นการ เล่น ที่ถูกกฎหมายในประเทศลาว
และได้รับ ความสนใจ อย่างมากในหมู่ พลเมืองไทย โดยเฉพาะอย่างยิ่งในช่วงเทศกาลสำคัญ ๆ เช่น วันสงกรานต์ วันขึ้นปีใหม่ และช่วงก่อนการออกรางวัลใหญ่ของ»หวยลาว» ผู้คนจะ ต่างทำ เพื่อลุ้นรับ ความมั่งมี ที่จะเปลี่ยนแปลง ชีวิตของพวกเขา
อย่างไรก็ตาม การ ซื้อ
«หวยลาว» ก็ไม่ปราศจากปัญหา
เนื่องจากบางคนอาจ หลงไหล
การพนันและใช้เงินมากเกินไป ส่งผลให้เกิด ผลเสีย นอกจากนี้ การเล่น «หวยลาว» ยังอาจเป็นช่องทางให้คนบางกลุ่ม
กระทำการอันไม่ถูกต้อง โดยมิชอบ ด้วยการ ปิดบัง รางวัลของผู้ชนะ
แม้ว่าการ ลุ้น «หวยลาว» จะเป็นกิจกรรมที่ถูกกฎหมายและ เป็นที่ชื่นชอบ ในหมู่
ผู้คนในไทย แต่ควรมีการ ปกป้อง อย่างใกล้ชิดเพื่อป้องกัน
ปัญหาที่อาจ ตามหลัง ทั้งนี้ เพื่อให้การ เสี่ยง «หวยลาว» เป็นเพียงการ ทดลองโชค เท่านั้น และ ไม่ทำให้เกิดผลกระทบ ต่อ ความสัมพันธ์
ของ ผู้เสี่ยง
Here is my blog — เว็บคาสิโนออนไลน์ที่มีการรับประกันความปลอดภัยและความน่าเชื่อถือสูงสุด [http://www.openlearning.com]
Профессиональный сервисный центр по ремонту кофемашин по Москве.
Мы предлагаем: ремонт кофемашин москва выезд
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Link exchange is nothing else but it is only placing the other person’s web site link on your page at appropriate place and other
person will also do similar in favor of you.
my website fitspresso coffee
I am really inspired along with your writing
abilities and also with the layout in your blog. Is this a paid subject or did you modify it your self?
Either way stay up the nice high quality writing, it is
rare to look a nice weblog like this one nowadays..
Scanner.biz makes scanning documents fast and easy with your smartphone.
Whether it’s contracts, receipts, or notes, you can instantly turn them into
clear PDFs or images. The app automatically enhances brightness and crops to ensure professional-looking results every time.
Forget heavy equipment—Scanner.biz offers everything you need for mobile scanning.
With multi-page support and easy file organization, managing documents on the
go is effortless. Available for Android
and iPhone, Scanner.biz is your perfect tool for fast,
efficient document scanning!
ComFax is the top solution for sending faxes right from your
smartphone, available for both Android and iPhone. In a few
simple steps, you can send important documents in minutes—no need for a fax machine.
Just upload your file, enter the number, and send.
The app focuses on security, using encrypted channels to keep your
data safe. Whether you’re working from home or on the move, ComFax
offers a quick, secure, and convenient way to meet your
faxing needs. Stay efficient and connected with ComFax!
Hi! Do you know if they make any plugins to safeguard against hackers?
I’m kinda paranoid about losing everything I’ve worked hard on. Any suggestions?
Visit my site; nanodefense pro deliverable
Scanner.biz converts your smartphone into a powerful, portable scanner,
allowing you to scan any paper document into a crisp PDF
or image in seconds. Be it contracts, receipts, or handwritten notes, the app automatically adjusts brightness and cropping for professional results.
No more bulky scanners—Scanner.biz offers fast, efficient scanning right
from your smartphone. It supports multi-page documents and allows easy file organization and sharing.
Compatible with both Android and iPhone, Scanner.biz simplifies document
management wherever you are!
I’ve read several just right stuff here. Certainly value bookmarking for revisiting.
I surprise how so much effort you set to make any
such wonderful informative web site.
Feel free to surf to my site ingredients in tonic greens
Restaurante Tinajas: O Sabor que Deixou Saudades
O ícone da gastronomia panamenha fechou suas portas, marcando época
na culinária local. Se destacava por suas noites culturais.
https://godfather-789.com/ยเว็บตรงของคนไทย เจ้าพ่อมาเฟียเว็บใหญ่ไม่มีโกง
Hi there, I enjoy reading all of your article.
I like to write a little comment to support you.
I pay a visit each day some blogs and information sites to read articles or reviews, however this blog provides feature
based posts.
Also visit my webpage; the genius wave review
I constantly spent my half an hour to read this weblog’s articles or reviews all the time along with a cup of coffee.
Feel free to surf to my web blog herpesyl side effects
I really like reading through a post that will make men and women think.
Also, thanks for allowing for me to comment!
Review my web blog — boostaro official site
I’m really enjoying the design and layout of your website.
It’s a very easy on the eyes which makes it much more enjoyable for
me to come here and visit more often. Did you hire out a designer to create
your theme? Exceptional work!
Feel free to surf to my web-site: provadent chews
Сервисный центр предлагает замена экрана packard bell dot u замена usb разъема packard bell dot u
can you get cheap cetirizine no prescription
Смешные свежие анекдоты
Заходи посмеяться
Hey there! Quick question that’s entirely off topic.
Do you know how to make your site mobile friendly?
My blog looks weird when viewing from my iphone.
I’m trying to find a template or plugin that might be able to correct this problem.
If you have any recommendations, please share. Thank you!
Feel free to visit my website :: is herpesyl safe to take
ремонт стекол автомобиля лобовое стекло с установкой в спб
Hey there! Someone in my Facebook group shared this website with us so I came to give it a look. I’m definitely loving the information. I’m book-marking and will be tweeting this to my followers! Outstanding blog and excellent style and design.
Heya this is kinda of off topic but I was wondering if blogs use WYSIWYG
editors or if you have to manually code with HTML.
I’m starting a blog soon but have no coding knowledge so I wanted to get guidance from
someone with experience. Any help would be enormously appreciated!
my blog does tonic greens cure herpes
I wanted to thank you for this very good read!! I
absolutely loved every bit of it. I have you book-marked to check out new
stuff you post…
Take a look at my web page — emperor’s vigor tonic reviews
Hi to all, how is the whole thing, I think every one is getting more from
this website, and your views are nice in support
of new visitors.
Feel free to surf to my website :: does tonic greens get rid of herpes
https://ru.pinterest.com/pin/784118985154227968/
Hi there, yup this article is in fact good and I have learned lot
of things from it about blogging. thanks.
Also visit my blog :: testoprim d for sale
модульні меблі
order generic tetracycline without dr prescription
where to buy generic benemid pills
Hello, just wanted to say, I enjoyed this blog post. It was helpful. Keep on posting!
Продажа мини-погрузчиков Lonking
Продажа мини-погрузчиков Lonking на территории России от официального
дистрибьютора. Новая многофункциональная техника для любых задач.
Наши машины предназначены для того, чтобы упростить вашу работу:
от строительных площадок до складских операций.
Высокая эффективность, надежность и инновационные решения — все,
что вам нужно для успешных проектов. Погрузите свой бизнес в будущее
с мини-погрузчиками Lonking!
47% российских покупателей выбрали мини-погрузчики Lonking в 2023 году продано более 1200 единиц.
Мини-погрузчики Lonking
where to buy advair diskus no prescription
Сайт мебели
Ethanol. Decatur. Movies with timothee chalamet. Model. Spandex. Tony romo. Clive owen. William prince of wales. Portuguese. https://81.200.117.113
Outstanding story there. What occurred after? Take care!
Also visit my page boostaro official site
Why people still use to read news papers when in this technological globe everything is available on net?
Also visit my site dentavim reviews
Amazing blog! Is your theme custom made or did you download it from somewhere? A design like yours with a few simple adjustements would really make my blog shine. Please let me know where you got your design. Thanks
levaquin 750 mg for strep throat
I blog quite often and I genuinely appreciate your information. The
article has truly peaked my interest. I am going to bookmark your site
and keep checking for new details about once per week.
I opted in for your Feed too.
My homepage … post33654
Придбати меблі Київ
In living color. Travis kelce height. Youtube.. Pedantic meaning. Rip torn. Medellin colombia. Biltmore estate. https://81.200.117.113
1xBet Deposit Bonus https://actuchomage.org/includes/wkl/code_promo_69.html
The 1xBet deposit bonus is a special offer that matches a percentage of the user’s deposit, providing extra funds to bet with. This bonus is often available to new users and can be enhanced with promo codes.
1xBet Welcome Bonus Promo Code https://actuchomage.org/includes/wkl/code_promo_69.html
The 1xBet welcome bonus promo code is a code that new users can enter during registration to receive a welcome bonus. This bonus typically includes a deposit match and may also provide free bets or free spins.
1xBet https://idematapp.com/wp-content/pages/1xbet_promo_codes_free_bonus_offers.html
1xBet is a popular online bookmaker and casino platform that offers a wide range of betting options on sports events, virtual games, and casino games. The platform is known for its generous promotions and bonuses, catering to both new and existing customers worldwide.
1xBet Singapore Bonus https://actuchomage.org/includes/wkl/code_promo_69.html
1xBet provides specific bonuses for users in Singapore, including promo codes that offer free bets, deposit matches, or free spins. These bonuses are tailored to the preferences of Singaporean users.
Promo Code on 1xBet https://actuchomage.org/includes/wkl/code_promo_69.html
Promo codes on 1xBet unlock bonuses like deposit matches, free bets, or free spins. These codes can be entered during registration or when making a deposit to claim the corresponding bonus.
1xBet Promocode https://actuchomage.org/includes/wkl/code_promo_69.html
1xBet promocodes are special codes that unlock bonuses like free bets, deposit matches, or free spins. These codes are often distributed through promotions and can be entered during registration or deposit.
Awesome things here. I’m very happy to look your article. Thank you so much and I’m taking a look ahead to contact you. Will you kindly drop me a mail?
you’re actually a excellent webmaster. The site loading speed is amazing.
It sort of feels that you’re doing any distinctive trick.
Furthermore, The contents are masterwork. you’ve done a magnificent
activity on this topic!
Check out my website :: alpha bites work
cleocin dose in pediatrics
Смешные картинки. Как они появились.
Смешные мемы. Как они появились.
Прикольные мемы. Как они появились.
gomelsutochno.ru
gomelsutochno.ru
Admiring the time and effort you put into your blog and detailed information you offer.
It’s great to come across a blog every once
in a while that isn’t the same old rehashed material.
Great read! I’ve bookmarked your site and I’m including
your RSS feeds to my Google account.
My web site nerve pro 6
Write more, thats all I have to say. Literally, it seems as though you relied on the video to
make your point. You definitely know what youre talking about, why waste your intelligence
on just posting videos to your blog when you could be giving us something
enlightening to read?
my blog post what is alpha bites
Great post.
Наш Психолог сейчас
gomelsutochno.ru
gomelsutochno.ru
Remarkable Post Feedback
Remarkable , what a profound post ! I truly relished reading your analysis on this subject .
As a reader who has been tracking your website
for a period of time , I ought to communicate that this is
alongside your most skillfully composed and enthralling
works so far .
The manner you interlaced together lenses and scientific findings was sincerely astounding .
I discovered myself agreeing as I perused , as your claims
solely seemed to progress astonishingly seamlessly .
my web-site bk8 online
It’s impressive that you are getting ideas from this article as well as from our argument made at this time.
Hello! Quick question that’s completely off topic. Do you know how to make your site mobile friendly? My blog looks weird when browsing from my iphone 4. I’m trying to find a template or plugin that might be able to correct this problem. If you have any suggestions, please share. With thanks!
where can i buy cheap motilium without dr prescription
gomelsutochno.ru
Yes! Finally something about %keyword1%.
get generic amoxil prices
gomelsutochno.ru
Смешные анекдоты.
Meds information. Brand names.
can i get tolterodine without prescription
Best news about pills. Get now.
can i purchase generic myambutol tablets
Прикольные анекдоты.
Direct web slots Win big with slot games with special features and exciting graphics in 2024. Sign up today to receive free spin bonuses and special promotions.✨
สล็อต 66
doxycycline for sale canada
The importance of secure cross-border payments in today’s economy, Why secure cross-border payments are crucial for businesses, The benefits of using secure cross-border payment solutions, Top reasons to prioritize secure cross-border payments, Understanding the risks of insecure cross-border payments, The evolution of secure cross-border payments in a global economy, Secure cross-border payments: a guide for small businesses, Improving efficiency with secure cross-border payment platforms, How to protect your business with secure cross-border payment methods, The benefits of secure cross-border payments for e-commerce businesses
secure international credit card payments ensuring data security in international payments .
Medication prescribing information. Short-Term Effects.
get levitra for sale
Everything information about meds. Get information here.
where can i get generic diovan without insurance
rgbet
Trong bối cảnh ngành công nghiệp cá cược trực tuyến ngày càng phát triển, việc lựa chọn một nhà cái uy tín trở nên vô cùng quan trọng đối với những người đam mê cá cược.Nhà cái RGBET nổi lên như một sự lựa chọn hàng đầu đáng để bạn quan tâm, hứa hẹn mang đến cho bạn một trải nghiệm cá cược an toàn, công bằng và thú vị. Từ các trò chơi cá cược đa dạng, dịch vụ chăm sóc khách hàng tận tình đến tỷ lệ cược cạnh tranh, Rgbet sở hữu nhiều ưu điểm vượt trội khiến bạn không thể bỏ qua.Hãy cùng khám phá những lý do tại sao bạn cần quan tâm đến nhà cái Rgbet và tại sao đây nên là lựa chọn hàng đầu của bạn trong thế giới cá cược trực tuyến.
Wow, superb blog format! How long have you been running a blog for?
you made running a blog look easy. The overall glance of your site
is fantastic, as smartly as the content!
My web blog — david lewis sight care
[url=https://play-zeus-vs-hades.ru]https://play-zeus-vs-hades.ru[/url]
last news about zeus vs hades
play-zeus-vs-hades.ru
where can i get caduet online
Drug prescribing information. What side effects can this medication cause?
can i get cheap motrin prices
Some trends of drugs. Read now.
It is appropriate time to make some plans for the future and it’s time to be happy. I have read this post and if I could I desire to suggest you some interesting things or suggestions. Maybe you can write next articles referring to this article. I wish to read even more things about it!
can you get generic differin without prescription
Excellent blog here! Also your web site loads up fast!
What host are you using? Can I get your affiliate link to your host?
I wish my web site loaded up as fast as yours lol
Medicament information for patients. What side effects?
can i order generic zithromax online
Some what you want to know about drugs. Read information now.
how can i get mentax for sale
This site was… how do I say it? Relevant!! Finally I’ve found something that helped me.
Thanks a lot!
Look into my blog post UltraK9 Pro
Hi it’s me, I am also visiting this web page regularly, this web site is actually good and the users are in fact sharing pleasant thoughts.
bs2best
how to get generic clomid without a prescription
bkacksprut
bs02.at
Since the admin of this web page is working, no question very
soon it will be well-known, due to its feature contents.
Here is my web blog purdentix chewables
On Videonaats, you can find an extensive library of naats and Islamic videos that cater to various preferences and tastes.
bkacksprut
bs2best
buying generic zocor without insurance
bkacksprut
For newest news you have to pay a quick visit internet and
on world-wide-web I found this website as a best web page for
most up-to-date updates.
Also visit my web blog :: lottery results
I feel this is among the such a lot vital info for me.
And i’m glad studying your article. But wanna observation on few normal things, The site taste
is great, the articles is really nice : D. Good process, cheers
Here is my site — purdentix
Hello There. I found your blog using msn. This is an extremely well written article. I will be sure to bookmark it and come back to read more of your useful information. Thanks for the post. I’ll definitely comeback.
healthymedinfo365
healthymedinfo24
healthymedinfo7
Вызов сантехника https://santekhnik-moskva.blogspot.com/p/v-moskve.html на дом в Москве и Московской области в удобное для вас время. Сантехнические работы любой сложности, от ремонта унитаза, устранение засора, до замены труб.
Теперь всё просто и удобно! деньги на карту зачисляются моментально, без бумажной волокиты.
healthymedinfo24
healthymedinfo365
Today, I went to the beach with my children. I found a sea shell and gave it to my 4 year old daughter and said «You can hear the ocean if you put this to your ear.» She put the shell to her ear and screamed. There was a hermit crab inside and it pinched her ear. She never wants to go back! LoL I know this is entirely off topic but I had to tell someone!
healthymedinfo7
รับประสบการณ์ pokdeng ออนไลน์ที่ดีที่สุดกับ pokdeng ออนไลน์!
สนุกตื่นเต้นไปกับเกมโปเกม่อนแบบเรียลไทม์กับผู้เล่นจากทั่วประเทศไทย ความสนุกในการเล่นเกมนับพันชั่วโมงรอคุณอยู่ เข้าร่วมเลยตอนนี้
My site … คาสิโนออนไลน์มือถือ
Hello, I wish for to subscribe for this website to take hottest updates, therefore where can i do it
please help out.
Feel free to surf to my blog — getsightcare fast
Нуждаетесь в быстрых и выгодных займах? Тогда вам стоит посетить https://dengibyn.ru для получения всех предложений.
Как вы относитесь к домам престарелых? пансионат для пожилых
แพะ ล่าสุด อ่านบล็อกนี้ และรู้สึกตื่นเช้า มาก!
เหตุการณ์ ที่น่าสนใจประกอบกับ รายละเอียดในอัน ครบถ้วน
ทำให้ผมได้รับประสบการณ์
ใหม่ๆ มากมาย ผมชอบแนวทาง ที่คุณพิจารณา
ประเด็นต่างๆ อย่างละเอียด และนำเสนอ แนวคิดที่น่าสนใจ ผมเห็นด้วยในมุมมอง หลายจุดที่คุณกล่าวถึง และมองที่เป็นเรื่องที่สำคัญและควรได้รับการทบทวน อย่างถี่ถ้วน
นอกจากนี้ ผมยังชอบ ความทันสมัย ในการนำเสนอ เนื้อหา การใช้ภาษา ที่ใช้เข้าใจง่าย และการนำเสนอ ที่น่าสนใจ ด้วยเหตุที่ อ่านแล้วรู้สึกสนุก เป็นบล็อกที่ยอดเยี่ยม และน่าติดตามอย่างที่สุด
ชื่นชมยินดี ที่แบ่งปันข้อมูล และความคิดเห็น ที่น่าสนใจ ผมรอเฝ้าลุ้น ที่จะอ่านบทความอื่นๆ ของคุณในระยะเวลาอันใกล้ และหวังว่าจะได้ได้โอกาส พูดคุย ทัศนะ กับคุณเช่นเดียวกัน
Feel free to surf to my web blog; ตรวจ หวยออนไลน์
Интернет-магазин плитки и керамики «ИнфоПлитка»
Интернет-магазин керамической плитки и керамогранита «Infoplitka» (infoplitka.ru)
предлагает широкий ассортимент высококачественной плитки и керамогранита от ведущих производителей.
Мы стремимся предложить нашим клиентам только лучшее, поэтому в ассортименте представлены товары,
отвечающие самым высоким стандартам качества и дизайна.
Мы понимаем, что выбор керамической плитки и керамогранита – это важный этап в создании
комфортного и стильного интерьера. Поэтому наша команда профессионалов готова помочь вам в
подборе идеального варианта для вашего проекта. Независимо от того, нужны ли вам плитка
для ванной комнаты, кухни, гостиной, или же керамогранит для облицовки пола, вы всегда найдете
у нас разнообразные и актуальные коллекции, соответствующие последним тенденциям в области
дизайна интерьеров.
Официальный сайт «ИнфоПлитка»
It’s not my first time to go to see this site, i am browsing this web site dailly and take pleasant information from here all the time.
Не хватает средств на срочные нужды? Узнайте, как оперативно получить деньги в долг без ненужных проволочек.
С нами вы имеете возможность оформить займы онлайн в Минске когда угодно, без лишних документов.
Wow, this post particularly strike the nail upon the brain! I’ve been battling
with this matter for a long time and it’s consequently contemporary toward
check out anyone incredibly dive deep into the scenario and give hassle-free products and services.
The illustrations by yourself supplied were being amazingly relatable and I discovered
myself nodding together as I read through throughout them.
One particular point that very resonated with me
was the fact on your own manufactured regarding the relevance
of self-treatment. It’s thus straightforward towards obtain stuck up inside of the working day-in the direction of-working day grind and ignore our personalized well being.
Nonetheless as oneself rightly pointed out, getting
the period in direction of recharge and prioritize our psychological and bodily exercise is critical if
we will need toward be our least complicated selves. I’m totally moving in the direction of attempt employing some
of the ideas oneself shared. Thank yourself for this informative
and inspiring short article!
ความหลงไหล ในการ พนัน «หวยลาว» เป็นหนึ่งในกิจกรรมยอดนิยมในประเทศไทย โดยผู้คนจำนวนมากมักจะ หลงไหล ในการ ลุ้น ด้วยความหวังที่จะได้รับ โชคลาภ และ พัฒนา ชีวิตของตนเอง
«หวยลาว» เป็นการ ซื้อ ที่ถูกกฎหมายในประเทศลาว
และได้รับ ความต้องการ อย่างมากในหมู่ คนในประเทศไทย โดยเฉพาะอย่างยิ่งในช่วงเทศกาลสำคัญ ๆ เช่น วันสงกรานต์ วันขึ้นปีใหม่ และช่วงก่อนการออกรางวัลใหญ่ของ»หวยลาว» ผู้คนจะ ต่างเล่น เพื่อลุ้นรับ ความมั่งมี ที่จะ
ปรับเปลี่ยน ชีวิตของพวกเขา
อย่างไรก็ตาม การ พนัน «หวยลาว» ก็ไม่ปราศจากปัญหา เนื่องจากบางคนอาจ ปรารถนา การพนันและใช้เงินมากเกินไป ส่งผลให้เกิด ผลเสีย นอกจากนี้ การ เสี่ยง «หวยลาว» ยังอาจเป็นช่องทางให้คนบางกลุ่ม
กระทำการอันไม่ถูกต้อง โดยมิชอบ ด้วยการ ฉ้อโกง รางวัลของผู้ชนะ
แม้ว่าการ ลุ้น «หวยลาว» จะเป็นกิจกรรมที่ถูกกฎหมายและ เป็นที่ปรารถนา ในหมู่
คนไทย แต่ควรมีการ คุ้มครอง อย่างใกล้ชิดเพื่อ หลีกเลี่ยง
ปัญหาที่อาจ ตามหลัง ทั้งนี้ เพื่อให้การ พนัน «หวยลาว» เป็นเพียงการ
ลุ้นรับโชค เท่านั้น และ ไม่ทำให้เกิดปัญหา ต่อ คุณภาพชีวิต ของ ผู้เสี่ยง
Here is my web site … ลอตเตอรี่ออนไลน์
Having read this I believed it was really enlightening. I appreciate you spending some time and energy to put this informative article together. I once again find myself spending way too much time both reading and posting comments. But so what, it was still worth it!
What an thought-provoking and reflective entry !
I have to declare , your analysis of this
pivotal topic was sincerely exceptional .
The depth and complexity you incorporated to the
dialogue was remarkable , casting new light on the subtleties at work .
I found myself affirming as I read through your skillfully composed assertions .
The way you were empowered to extract the essential ideas excepting simplifying was
especially exceptional.
It’s clear you’ve dedicated a substantial amount
of effort into researching this topic .
This entry has presented me a great deal to ponder and has challenged me to reconsider specific components of my own perspective .
I value you investing the resources to disseminate your knowledge — entries like this are exceptionally
priceless in developing the more expansive
discussion .
I anticipate skimming more of your data in the days to
follow. Kindly sustain the superb work !
my site; demo slot microgaming free
https://psychiccentralphonereadings.com.au/bez-rubriki/snjat-kvartiru-na-sutki-na-prospekte-pobeditelej-v-6/
cetirizine in pregnancy
веном смотреть веном 2 смотреть онлайн смотреть веном 2
Заинтересовались быстрых и надёжных займах? Тогда вам стоит посетить https://dengibyn.ru для выгодных условий.
can you get generic aciphex for sale
ความสนใจ ในการ เสี่ยง
«หวยลาว» เป็นหนึ่งในกิจกรรมยอดนิยมในประเทศไทย
โดยผู้คนจำนวนมากมักจะ ต้องการ ในการ ซื้อ ด้วยความหวังที่จะได้รับ
เงินก้อนโต และ ปรับเปลี่ยน ชีวิตของตนเอง
«หวยลาว» เป็นการ ทำ ที่ถูกกฎหมายในประเทศลาว
และได้รับ ความต้องการ อย่างมากในหมู่ พลเมืองไทย โดยเฉพาะอย่างยิ่งในช่วงเทศกาลสำคัญ ๆ เช่น วันสงกรานต์ วันขึ้นปีใหม่ และช่วงก่อนการออกรางวัลใหญ่ของ»หวยลาว» ผู้คนจะ
ต่างพนัน เพื่อลุ้นรับรางวัลเงินก้อนใหญ่ ที่จะ ปรับปรุงให้ดีขึ้น ชีวิตของพวกเขา
อย่างไรก็ตาม การ ทำ «หวยลาว» ก็ไม่ปราศจากปัญหา เนื่องจากบางคนอาจ หลงไหล การพนันและใช้เงินมากเกินไป ส่งผลให้เกิด ผลกระทบ นอกจากนี้ การ เสี่ยง «หวยลาว» ยังอาจเป็นช่องทางให้คนบางกลุ่ม กระทำผิด โดยมิชอบ ด้วยการหลอกลวง รางวัลของผู้ชนะ
แม้ว่าการเล่น «หวยลาว» จะเป็นกิจกรรมที่ถูกกฎหมายและ เป็นที่ชื่นชอบ ในหมู่ คนไทย แต่ควรมีการ ดูแล อย่างใกล้ชิดเพื่อป้องกัน ปัญหาที่อาจเกิดขึ้น ทั้งนี้
เพื่อให้การ ซื้อ
«หวยลาว» เป็นเพียงการ
เล่นเพื่อความตื่นเต้น เท่านั้น และ ไม่ก่อให้เกิดผลเสีย
ต่อ คุณภาพชีวิต ของ ผู้พนัน
Look at my website: เกมส์คาสิโนออนไลน์ยอดฮิต, http://yogicentral.science/index.php?title=burnsfields9387,
The provided content of this blog post is truly compelling.
I appreciated the way you scrutinized the
diverse issues so extensively and clearly . You enabled me
acquire innovative perspectives that I had not deliberated before.
I’m grateful for sharing your proficiency and adeptness
— it has allowed me to acquire knowledge even more.
I especially appreciated the pioneering viewpoints you introduced
, which broadened my mindset and cognition in significant courses.
This blog is coherent and captivating , which is essential for content of
this caliber .
I anticipate to review additional of your writings in the
future , as I’m convinced it shall continue to be illuminating
and enable me continue growing . Thanks again !
Feel free to visit my homepage … online lottery (https://hjelmharboe55.livejournal.com/)
Quality articles or reviews is the key to attract the visitors to visit
the web page, that’s what this site is providing.
Review my website … what is genius wave
https://www.massenerji.com.tr/snjat-nedvizhimost-na-sutki-v-minske-posutochnaja-11/
Hey there, I think your site might be having browser compatibility issues.
When I look at your blog in Ie, it looks fine but when opening in Internet Explorer, it has some overlapping.
I just wanted to give you a quick heads up!
Other then that, excellent blog!
My web page provadent really work
buy generic doxycycline without prescription
Woah! I’m really loving the template/theme of this blog. It’s simple, yet effective. A lot of times it’s very difficult to get that «perfect balance» between user friendliness and visual appeal. I must say you’ve done a fantastic job with this. In addition, the blog loads extremely quick for me on Safari. Superb Blog!
Понадобились средства срочно? Оформите займ на карту и переведите деньги в кратчайшие сроки.
Why Buy Bank Owned Reos Rather Than Short Sales 소액 대출
https://well-mama.org/snjat-kvartiru-na-sutki-ili-na-chas-v-minske-6/
nhà cái
Trong bối cảnh ngành công nghiệp cá cược trực tuyến ngày càng phát triển, việc lựa chọn một nhà cái uy tín trở nên vô cùng quan trọng đối với những người đam mê cá cược.Nhà cái RGBET nổi lên như một sự lựa chọn hàng đầu đáng để bạn quan tâm, hứa hẹn mang đến cho bạn một trải nghiệm cá cược an toàn, công bằng và thú vị. Từ các trò chơi cá cược đa dạng, dịch vụ chăm sóc khách hàng tận tình đến tỷ lệ cược cạnh tranh, Rgbet sở hữu nhiều ưu điểm vượt trội khiến bạn không thể bỏ qua.Hãy cùng khám phá những lý do tại sao bạn cần quan tâm đến nhà cái Rgbet và tại sao đây nên là lựa chọn hàng đầu của bạn trong thế giới cá cược trực tuyến.
buying generic capoten tablets
Дополнительно от любителя азартных развлечений требуется избрать одну из доступных валют для
проведения всех финансовых расчетов.
Процедура верификации личности пользователя
является обязательной для всех пользователей.
Проверка личности пользователя осуществляется после регистрации.
Для подтверждения предоставленной личной информации от игрока потребуется выслать на адрес
электронной почты администрации интернет-портала сканкопии или фото соответствующих документов.
Дополнительно игрокам, которые планируют использовать банковскую карту выслать фото своей карты с двух сторон.
На сайте представлены лучшие игровые автоматы, разработанные ровно отечественными, так
и зарубежными производителями софта для интернет-казино.
Все представленные игры являются
сертифицированными, что гарантирует их честность и надежность.
Среди представленных игровых автоматов присутствуют разработки таких компаний, как: На сайте представлены
лучшие игровые автоматы, разработанные словно
отечественными, эдак и зарубежными производителями софта для интернет-казино.
Все представленные игры являются сертифицированными, что гарантирует их беспорочность и
надежность.
Howdy! This blog post could not be written much better! Going through this post reminds me of
my previous roommate! He constantly kept preaching about this.
I am going to send this post to him. Pretty sure he’s going to have a very good read.
Thank you for sharing!
Feel free to visit my web page; where can i buy sugar defender
The substance of this blog article is truly captivating .
I delighted in the way you analyzed the numerous
issues so thoroughly and unambiguously. You enabled me gain new outlooks that I never previously pondered before.
Thank you for imparting your mastery and competence — it has enabled me to gain understanding further .
I particularly enjoyed the ground-breaking standpoints you introduced , which widened
my awareness and cognition in valuable directions .
This blog is systematic and engaging , which is fundamental for
subject matter of this standard .
I anticipate to review more of your creations in the upcoming period, as I’m confident it shall continue to be educational and help me
keep developing . I convey my thankfulness!
my page … online casino player experience (click4r.com)
I couldn’t resist commenting. Exceptionally well written!
Salutes , peer audience . I came across your reflective observations
on the blog article highly sharp .
Your perspective on the topic is rather laudable .
As you seem to bear a fervent investment in the subject
, I will offer an solicitation for you to dive into the sphere
of ‘918KISS’.
This specific channel delivers a comprehensive assortment
of fascinating content that address users comprising multifaceted
hobbies .
I suspect you will uncover the alliance at ‘918KISS’
as being simultaneously rewarding and cerebrally riveting
.
I recommend you to consider joining us and sharing your unparalleled perspectives to the ceaseless
debates . Eagerly awaiting hypothetically
incorporating you into our group .
Here is my webpage casino games — https://wikimapia.org/external_link?url=https://kiss918.bet/about-us —
I stumbled upon your blog post to be a insightful and astute examination of the
contemporary state of the sphere. Your investigation of
the pivotal developments and obstacles confronting enterprises in this
realm was extraordinarily forceful .
As an avid advocate of this topic , I would be pleased
to build upon this dialogue further . If
you are eager , I would happily encourage you to delve into the thrilling
possibilities presented at WM CASINO. Our platform
presents a modern and fortified context for connecting with kindred
spirit adherents and gaining a abundance of resources to strengthen your understanding of this fluctuating
sphere . I eagerly await the prospect of joining forces with you in the near time
my page :: free credit casino
Hi there! This is my first comment here so I just
wanted to give a quick shout out and say I truly enjoy reading through your blog posts.
Can you suggest any other blogs/websites/forums that deal with the same topics?
Thank you!
Feel free to surf to my web-site alpha bits
I am sure this post has touched all the internet viewers,
its really really fastidious piece of writing on building up
new website.
Check out my website; is billionaire brain wave a scam
diltiazem indications
bs2site
Relish Your Feedback!
I’m Ecstatic you Stumbled upon the Commentary Informative.
If you’re Eager to explore Delving into more Openings in the online Gaming Realm, I’d Recommend Checking out CMD368.
They Provide a Myriad of Intriguing Punting Avenues, Live streaming, and a Straightforward App.
What I Highly Prefer about CMD368 is their Focus to Controlled
Gaming. They have Reliable Policies and Resources to
Aid Customers Stay in control.
Irrespective you’re a Adept Punter or Unaccustomed to the Gambling,
I Reckon you’d Genuinely Enjoy the Adventure.
Please Sign up Via the Site and Reach out if you have More Doubts.
Feel free to visit my homepage — cmd368 singapore (https://susanwax96.bravejournal.net/)
bs2best
blacksprut
Нужен быстрый способ перевести займ на карту? Мы предложим удобные и выгодные предложения.
bs2site
bs2site.at
Excellent way of telling, and pleasant paragraph to obtain data on the topic of my presentation focus, which i am going to convey in college.
https://kharallawcompany.com/snjat-kvartiru-na-sutki-v-minske-arenda-kvartir-7/
cost generic augmentin pills
stromectol eureka
bs2site.at
Не можете найти, где выгоднее всего оформить кредит? На https://limazaim.ru вы откроете для себя все варианты и условия.
https://laineleads.com/kvartiry-na-sutki-v-minske-bez-posrednikov-53-2/
Everything is very open with a very clear description of the challenges. It was definitely informative. Your website is useful. Many thanks for sharing!
rgbet
RGBET: Trang Chủ Cá Cược Uy Tín và Đa Dạng Tại Việt Nam
RGBET đã khẳng định vị thế của mình là một trong những nhà cái hàng đầu tại châu Á và Việt Nam, với đa dạng các dịch vụ cá cược và trò chơi hấp dẫn. Nhà cái này nổi tiếng với việc cung cấp môi trường cá cược an toàn, uy tín và luôn mang lại trải nghiệm tuyệt vời cho người chơi.
Các Loại Hình Cá Cược Tại RGBET
RGBET cung cấp các loại hình cá cược phong phú bao gồm:
Bắn Cá: Một trò chơi đầy kịch tính và thú vị, phù hợp với những người chơi muốn thử thách khả năng săn bắn và nhận về những phần thưởng giá trị.
Thể Thao: Nơi người chơi có thể tham gia đặt cược vào các trận đấu thể thao đa dạng, từ bóng đá, bóng rổ, đến các sự kiện thể thao quốc tế với tỷ lệ cược hấp dẫn.
Game Bài: Đây là một sân chơi dành cho những ai yêu thích các trò chơi bài như tiến lên miền Nam, phỏm, xì dách, và mậu binh. Các trò chơi được phát triển kỹ lưỡng, đem lại cảm giác chân thực và thú vị.
Nổ Hũ: Trò chơi slot với cơ hội trúng Jackpot cực lớn, luôn thu hút sự chú ý của người chơi. Nổ Hũ RGBET là sân chơi hoàn hảo cho những ai muốn thử vận may và giành lấy những phần thưởng khủng.
Lô Đề: Với tỷ lệ trả thưởng cao và nhiều tùy chọn cược, RGBET là nơi lý tưởng cho những người đam mê lô đề.
Tính Năng Nổi Bật Của RGBET
Một trong những điểm nổi bật của RGBET là giao diện thân thiện, dễ sử dụng và hệ thống bảo mật tiên tiến giúp bảo vệ thông tin người chơi. Ngoài ra, nhà cái này còn hỗ trợ các hình thức nạp rút tiền tiện lợi thông qua nhiều kênh khác nhau như OVO, Gopay, Dana, và các chuỗi cửa hàng như Indomaret và Alfamart.
Khuyến Mãi và Dịch Vụ Chăm Sóc Khách Hàng
RGBET không chỉ nổi bật với các trò chơi đa dạng, mà còn cung cấp nhiều chương trình khuyến mãi hấp dẫn như bonus chào mừng, cashback, và các phần thưởng hàng ngày. Đặc biệt, dịch vụ chăm sóc khách hàng của RGBET hoạt động 24/7 với đội ngũ chuyên nghiệp, sẵn sàng hỗ trợ người chơi qua nhiều kênh liên lạc.
Kết Luận
Với những ưu điểm nổi bật về dịch vụ, bảo mật, và trải nghiệm người dùng, RGBET xứng đáng là nhà cái hàng đầu mà người chơi nên lựa chọn khi tham gia vào thế giới cá cược trực tuyến.
https://viktoria-musikschule.de/snjat-kvartiru-na-sutki-na-prospekte-pobeditelej-v-9/
all the time i used to read smaller articles or
reviews that also clear their motive, and that is also happening with this piece of writing which I am reading at this place.
Here is my web blog: Unlock your success with The Billionaire Brain Wave
where buy generic dapsone without prescription
Найти специалиста по независимой экспертизе и оценке!
Сайт-агрегатор компаний и услуг в сфере независимой экспертизы и оценки.
Мы создали этот проект, чтобы помочь вам найти надежных и опытных профессионалов
для решения ваших задач.
Главная цель — сделать процесс поиска специалистов по независимой экспертизе
и оценке максимально простым и эффективным. Мы стремимся предоставить вам
доступ к компаниям, которые гарантируют высокое качество услуг.
С нами вы сможете быстро найти нужного эксперта и сравнить различные предложения.
На нашем сайте собраны карточки компаний, каждая из которых содержит подробную
информацию о предоставляемых услугах. Посетители могут фильтровать предложения
по различным критериям:
Локация
Направление экспертизы
Стоимость услуг
Отзывы клиентов
Наш сайт Специалисты по независимой экспертизе и оценке.
can i purchase cheap diovan pills
These are really impressive ideas in concerning blogging. You have touched some nice factors here. Any way keep up wrinting.
Не хватает средств на срочные нужды? Узнайте, как быстро получить деньги в долг без ненужных проволочек.
Terminated Reading a Blog Post: A Formal Input to the Comment Section and an Invitation to Join «KING855»
‘After comprehensively perusing the blog post, I would like to submit the following reply to
the forum.
Your insights on the topic were quite intriguing . I found myself in agreement
with many of the claims you raised .
It is heartening to witness such an dynamic
dialogue unfolding.
If you are inclined in additional exploring
this topic , I would sincerely urge you to join the «KING855» network .
There , you will have the chance to engage with kindred spirit individuals
and dive deeper into these intriguing topics
.
I believe your participation would be
a significant addition to the discourse .
Appreciate your contribution , and I look forward
to the prospect of extending this enriching
conversation.
Also visit my web page online casino player brand loyalty
Sweet blog! I found it while searching on Yahoo News.
Do you have any tips on how to get listed in Yahoo News?
I’ve been trying for a while but I never seem to get there!
Many thanks
Here is my homepage; plantsulin reviews
7 Seo Tips To Obtain High Ranking In Search Engines 구글상위노출 대행사
Drugs information for patients. Generic Name.
cost of levaquin no prescription
Actual information about meds. Read here.
where can i get cheap uroxatrall without rx
Superb Message to Web Publication Comment
Fantastic submission! I’m definitely reveling in the subject matter on this
website. Have you before considered over procuring part of web-based betting playing?
Evolution Gambling is a incredible provider featuring a
comprehensive range of outstanding immersive
gaming specialist products. The adventure is extremely absorbing and legitimate,
it is analogous to you’re perfectly within the casino as a part of the true gambling.
Should you’re inclined regarding exploring it too, I’d be
delighted to share my advice website address.
The Evolution Gaming Platform provides a superb onboarding promotion for interested latest bettors.
It certainly definitely useful reviewing additionally on the condition you’re seeking a new internet playing affair.
Acknowledgment further pertaining to the internet log subject
matter. Preserve with the brilliant labor!
Feel free to surf to my blog; gambling lead generation
At this time it seems like Expression Engine is the top blogging platform out there right now. (from what I’ve read) Is that what you’re using on your blog?
where can i get advair diskus for sale
where to get celebrex
Drug information sheet. Brand names.
order tetracycline pill
Best news about drugs. Read information here.
Salutations, companion reader. I must praise
the author for their keen and eloquently-crafted blog post.
The subject matter was both revealing and pensive, leaving me with a more profound understanding of the matter at hand.
I would intend to extend an appeal to join the
renowned PUSSY888 group. This environment offers
a landscape of recreation and adventure, targeting those who cherish the more distinguished things in existence.
I implore you to discover the eclectic options and captivate yourself in the exhilarating explorations that beckon you.
Your participation would be very accepted, and I look ahead to the
chance to engage with you more extensively within this distinguished electronic domain
Also visit my web page online casino payment processing
Теперь всё просто и удобно! деньги на карту зачисляются в течение нескольких минут, без бумажной волокиты.
stromectol pune
how can i get tegretol pill
Hi there! I know this is kinda off topic but I was wondering which blog platform are you using for this site?
I’m getting fed up of WordPress because I’ve had problems with hackers and
I’m looking at options for another platform. I would be
great if you could point me in the direction of
a good platform.
Feel free to visit my website — tonic greens ingredients
can i get albuterol
where to get motilium for sale
Medicine information leaflet. Generic Name.
can i get fluoxetine
Actual information about medicine. Get here.
blacksprut
I go to see every day a few web sites and websites to read articles or reviews, but this blog offers quality based posts.
blacksprut
Не знаете, где выгоднее всего взять займ? На https://limazaim.ru вы откроете для себя все предложения и детали.
Meds information for patients. Cautions.
can i purchase cheap proscar without dr prescription
Some information about medicines. Get here.
The provided substance of this blog post is truly compelling.
I appreciated the way you analyzed the various issues so
extensively and distinctly . You assisted me
obtain novel perspectives that I had never pondered before.
I’m thankful for communicating your proficiency and expertise
— it has equipped me to acquire knowledge more .
I particularly appreciated the innovative perspectives
you revealed, which enlarged my understanding and cognition in meaningful directions .
This blog is organized and engaging , which is essential for content of this quality.
I hope to peruse more of your compositions in the
upcoming period, as I’m confident it will continue to be educational and help me keep improving.
I convey my thankfulness!
Also visit my homepage; top rated online casinos in Canada
blacksprut
bs2best
Salutations , colleague audience . I came across your reflective commentary on the blog article most
sharp .
Your opinion on the content is considerably exemplary.
As you come across to bear a ardent fascination in the
topic , I shall deliver an summons for you to uncover the expanse of ‘918KISS’.
This unique system offers a broad collection of compelling content that serve
members including assorted inclinations .
I infer you may come across the network at ‘918KISS’ to be equally
rewarding and eruditely stimulating .
I urge you to contemplate joining us and imparting your inestimable
understandings to the continuous discourses
. Excited for theoretically embracing you into our fold
.
my blog: online casino bonuses
Meds prescribing information. Short-Term Effects.
where can i buy ursodiol no prescription
Everything news about meds. Get information here.
Ищете быстрый способ перевести деньги на карту? Мы предлагаем лучшие условия для быстрого оформления.
Value Your Thoughts!
I’m Glad you Located the Entry Informative.
If you’re Intrigued by Uncovering more Avenues in the online Gaming Field,
I’d Recommend Visiting CMD368.
They Present a Wide range of Captivating
Sports Choices, Immersive coverage, and a User-friendly Website.
What I Genuinely Value about CMD368 is their Devotion to Prudent Gambling.
They have Robust Security and Offerings to Help
Gamblers Maintain control.
Whether or not you’re a Skilled Punter or New to the
Punting, I Believe you’d Particularly Love the Venture.
Please Sign up By way of the Provided link and Ask if you have More
Doubts.
Meds information leaflet. What side effects?
can i order generic proscar pill
Everything trends of medicines. Get now.
If some one desires expert view about running a blog then i advise him/her to visit this website, Keep up the good
job.
Feel free to visit my webpage reviews on tonic greens
My brother recommended I might like this blog. He used to be totally right. This put up actually made my day. You cann’t imagine simply how a lot time I had spent for this information! Thanks!
When someone writes an paragraph he/she maintains
the thought of a user in his/her brain that how a user can understand it.
Thus that’s why this paragraph is perfect. Thanks!
Look into my web blog; iq blast pro reviews and complaints
buying finasteride without prescription
Сомневаетесь, где? На dengibyn вас ждут гибкие условия и широкий выбор предложений.
สนุกตื่นเต้นไปกับการเล่นเกมไพ่โปเกม่อนคาสิโนไทยแบบดั้งเดิมกับผู้เล่นจากทั่วโลก!
เล่นกับเพื่อนหรือท้าทายคู่ต่อสู้ทางออนไลน์เพื่อรับรางวัลใหญ่ ลงทะเบียนวันนี้เพื่อเริ่มชนะ!
my web blog … เครดิตฟรีคาสิโนออนไลน์
(https://notabug.org/artpanda61)
ST666 – Lựa Chọn Hàng Đầu Trong Thế Giới Cá Cược Trực Tuyến
Trong thời đại mà ngành công nghiệp cá cược trực tuyến đang bùng nổ, việc chọn một nhà cái uy tín là yếu tố quan trọng để đảm bảo trải nghiệm chơi an toàn và đáng tin cậy. ST666 nhanh chóng khẳng định vị thế của mình trên thị trường với những dịch vụ chất lượng và hệ thống bảo mật cao cấp, mang lại trải nghiệm cá cược công bằng, thú vị và an toàn.
Hệ Thống Trò Chơi Đa Dạng
ST666 cung cấp một danh mục trò chơi cá cược đa dạng, đáp ứng mọi nhu cầu và sở thích của người chơi. Từ thể thao, bắn cá, game bài, cho đến xổ số và live casino, tất cả đều được tối ưu hóa để mang lại cảm giác hứng thú cho người tham gia. Đặc biệt, với Live Casino, người chơi sẽ được trải nghiệm cá cược với các dealer thật thông qua hình thức phát trực tiếp, tạo cảm giác như đang tham gia tại các sòng bài thực tế.
Tỷ Lệ Cược Cạnh Tranh
Một trong những ưu điểm nổi bật của ST666 chính là tỷ lệ cược cực kỳ cạnh tranh, giúp người chơi tối ưu hóa lợi nhuận của mình. Các trận đấu thể thao được cập nhật liên tục với tỷ lệ cược hấp dẫn, tạo cơ hội chiến thắng lớn cho những ai yêu thích cá cược thể thao.
Bảo Mật An Toàn Tuyệt Đối
Yếu tố bảo mật luôn là một trong những tiêu chí hàng đầu khi chọn nhà cái cá cược. ST666 sử dụng công nghệ mã hóa hiện đại để bảo vệ thông tin cá nhân và các giao dịch tài chính của người chơi, đảm bảo mọi dữ liệu luôn được bảo mật tuyệt đối. Người chơi hoàn toàn có thể yên tâm khi tham gia cá cược tại đây.
Chăm Sóc Khách Hàng Chuyên Nghiệp
Dịch vụ chăm sóc khách hàng của ST666 luôn sẵn sàng hỗ trợ 24/7 qua nhiều kênh khác nhau như Live Chat, WhatsApp, Facebook, đảm bảo giải đáp mọi thắc mắc và xử lý các vấn đề nhanh chóng. Đội ngũ nhân viên tại đây được đào tạo chuyên nghiệp, tận tâm và chu đáo, luôn đặt lợi ích của khách hàng lên hàng đầu.
Ưu Đãi Hấp Dẫn
ST666 không chỉ nổi bật với các sản phẩm cá cược mà còn thu hút người chơi bởi các chương trình khuyến mãi hấp dẫn. Người chơi có thể nhận được nhiều ưu đãi như 280k miễn phí khi đăng nhập hàng ngày, cùng các chương trình thưởng nạp và hoàn tiền liên tục, giúp tối đa hóa cơ hội chiến thắng.
Lý Do ST666 Là Lựa Chọn Hàng Đầu
Sự kết hợp hoàn hảo giữa giao diện hiện đại, hệ thống trò chơi đa dạng, dịch vụ khách hàng tận tâm và tỷ lệ cược cạnh tranh đã giúp ST666 trở thành một trong những nhà cái cá cược trực tuyến uy tín hàng đầu tại Việt Nam. Đối với những ai đang tìm kiếm một nhà cái an toàn và chuyên nghiệp, ST666 chắc chắn sẽ là lựa chọn không thể bỏ qua.
Kết Luận
Với những ưu điểm vượt trội, ST666 xứng đáng là địa chỉ cá cược uy tín và an toàn cho tất cả người chơi. Đăng ký ngay hôm nay để trải nghiệm hệ thống cá cược đẳng cấp và nhận những ưu đãi hấp dẫn từ ST666!
Medicament prescribing information. Effects of Drug Abuse.
buying cheap prevacid pill
Everything what you want to know about meds. Read information now.
Ищите надежные финансовые услуги? Посетите https://dengibyn.ru и ознакомьтесь с подробности.
สาระ ของบล็อกนี้ เร้าใจมากๆ ครับ ผมชอบวิธีการ ทำการวิเคราะห์ ประเด็นต่างๆ อย่าง รอบคอบ และ มีความสมเหตุสมผล ชัดเจน
เป็นการช่วยให้ผู้อ่านเข้าใจ ประเด็นได้ลึกซึ้ง มากขึ้น คุณเขียนได้อย่าง เป็นระเบียบ
และ น่าสนใจ ซึ่งเป็นสิ่งสำคัญสำหรับบทความระดับนี้
นอกจากนั้น ผมยังชอบ
ความเห็นใหม่ๆ ที่คุณได้นำเสนอ ซึ่งเป็นสิ่งที่ ยังไม่เคย คิดมาก่อน
มันช่วยขยาย ทัศนคติ และ ทักษะของผมไปในทิศทางที่ ขยายขอบเขตขึ้น ผมขอขอบคุณที่คุณได้ นำเสนอ ความรู้และ ความเชี่ยวชาญ ของคุณ มันช่วยให้ผมได้ ก้าวไปข้างหน้ามากขึ้นอย่างแน่นอน
ผมหวังว่าจะได้อ่าน
บทความอื่นๆ ของคุณในอนาคตเช่นกัน
เพราะผมมั่นใจว่าจะมี ความหมาย และเป็นการ ยกระดับความรู้ให้กับผมอย่างแน่นอน ขอบคุณมากครับ!
Also visit my web-site แทงบอลออนไลน์
Tremendous things here. I’m very glad to see your post.
Thank you a lot and I am looking ahead to touch you.
Will you kindly drop me a mail?
Take a look at my webpage: money wave review
Nhà cái ST666 được biết đến là sân chơi uy tín cung cấp các sản phẩm trò chơi cực kỳ đa dạng và chất lượng. Số lượng người tham gia vào hệ thống ngày càng tăng cao và chưa có dấu hiệu dừng lại. Hướng dẫn tham gia nhà cái nếu như anh em muốn tìm kiếm cơ hội nhận thưởng khủng. Hãy cùng khám phá những thông tin cần biết tại nhà cái để đặt cược và săn thưởng thành công.
Wow! This blog looks just like my old one!
It’s on a completely different subject but it has pretty much
the same layout and design. Wonderful choice of colors!
Feel free to surf to my blog — the genius wave scam
I like what you guys are up too. This kind of clever work and reporting! Keep up the very good works guys I’ve incorporated you guys to my blogroll.
Excellent post. I will be facing a few of these issues
as well..
My web site :: the growth matrix leaks
where can i buy cheap deltasone pills
buy prednisone mastercard
Hi, i think that i saw you visited my site thus i came to “return the favor”.I am trying to find things to enhance
my site!I suppose its ok to use a few of your ideas!!
Here is my site; is free sugar pro a scam
Howdy! I’m at work browsing your blog from my new apple iphone!
Just wanted to say I love reading through your blog and look forward to
all your posts! Carry on the outstanding work!
Here is my web page: tonic greens real reviews
การ เสี่ยง «หวยฮานอย» เป็นอีก กิจกรรม หนึ่งที่ได้รับ ความหลงใหล
จาก ชาวไทย ในการ ซื้อ เมื่อ ไม่แตกต่างจาก การ พนัน หวยรัฐบาลหรือ»หวยลาว» ความ น่าตื่นเต้น ของ»หวยฮานอย»คือ การ จัดรางวัล ทุกวัน ส่งผลให้ผู้ ทำ สามารถ ได้รับ ได้บ่อยครั้ง และ มีช่องทาง สร้าง รายได้อื่น จากการ ทำ หวย
อย่างไรก็ตาม การ เสี่ยง «หวยฮานอย»
ก็ไม่ ข้อเสีย เนื่องจากผู้เล่น บางรายอาจ ลงทุน
มากเกินไปหรือ ชอบ การพนัน ซึ่งอาจ
ก่อให้เกิดปัญหา ต่อ การเงิน นอกจากนี้ ยังมี ความเป็นไปได้ เรื่อง การแสวงหาประโยชน์โดยมิชอบ จากผู้ที่ ต้องการผลตอบแทน
โดยมิชอบ
เพื่อให้การเล่น «หวยฮานอย» เป็นเพียงการ เล่นเพื่อความมุ่งหวัง เพื่อ ความบันเทิง และ
ไม่ทำให้เกิดผลเสีย จึงควรมีการ
ตรวจสอบ และ ลงโทษ
อย่างใกล้ชิด เช่น
การ ระบุ เวลา ในการ
ซื้อ ที่ เพียงพอ รวมถึงการตรวจสอบ ผู้
กระทำการผิดกฎหมาย
ทั้งนี้เพื่อให้การเล่น «หวยฮานอย» เป็นส่วนหนึ่งของการ ดำเนินการ อย่าง คำนึงถึงผลกระทบ และ ไม่ส่งผลเสียต่อ
สังคม ของผู้ ซื้อ
Also visit my web site: คาสิโนออนไลน์ที่ดีที่สุด
can i get cheap tadacip tablets
generic celebrex without insurance
Понадобились средства срочно? Оформите займ на карту и получите деньги в кратчайшие сроки.
https://forbesera.com/snjat-kvartiru-na-sutki-ili-na-chas-v-minske-25/
bs2best at
can you get cheap prednisone without rx
buy prilosec without prescription
https://dampertrailer.com/2024/09/23/snjat-kvartiru-na-sutki-v-minskoj-oblasti-bystroe-26/
bs02.at
Нужны проверенные финансовые услуги? Посетите https://dengibyn.ru и ознакомьтесь с подробности.
bs2site
bs2best at
cleocin ovule reviews
https://miniwp.sia-dev.ch/snjat-kvartiru-na-sutki-v-minske-dlja-vecherinki-32/
Undeniably consider that that you stated. Your favourite reason appeared to be
at the web the easiest factor to consider of.
I say to you, I definitely get annoyed even as other people consider issues that they
plainly don’t recognise about. You controlled to hit the nail
upon the highest and outlined out the whole thing without having side effect ,
folks could take a signal. Will probably be back to get more.
Thanks
hellcase
bs2best
Hello, I enjoy reading through your article. I wanted to write a little comment to support you.
where to buy ashwagandha leaves
That is a really good tip especially to those fresh to the blogosphere.
Brief but very precise information… Thanks for sharing this one.
A must read post!
My blog :: tonic greens reviews
can i order cheap cetirizine without dr prescription
http://www.phuketpipe.com/kvartiry-na-sutki-v-minske-500-bez-posrednikov-15/
ดิฉัน ครับ อ่านบล็อกนี้ และรู้สึกใจเต้นแรง
มาก! ประสบการณ์ ที่น่าสนใจด้วย รายละเอียดที่ ครบถ้วน ทำให้ผมได้รับความรู้ ใหม่ๆ
มากมาย ผมชอบแนวทาง ที่คุณพิจารณา ประเด็นต่างๆ อย่างลึกซึ้ง และชี้ให้เห็น แนวคิดที่น่าสนใจ ผมเห็นด้วยในมุมมอง หลายจุดที่คุณกล่าวถึง และมองที่เป็นเรื่องที่สำคัญและควรได้รับการพิจารณา อย่างจริงจัง
นอกจากนี้ ผมยังรู้สึกประทับใจ ความคิดสร้างสรรค์ ในการนำเสนอ เนื้อหา ภาษา ที่ใช้เข้าใจง่าย และการตกแต่ง
ที่น่าสนใจ เนื่องจาก อ่านแล้วรู้สึกสนุก เป็นบล็อกที่ทรงพลัง และน่าติดตามอย่างมาก
ชื่นชมยินดี ที่แบ่งปันประสบการณ์ และมุมมอง ที่น่าสนใจ ผมรอคอย ที่จะอ่านบทความเพิ่มเติม ของคุณในภายหน้า และหวังว่าจะได้มีโอกาส แบ่งปัน ทัศนะ กับคุณด้วย
My web site :: หวยออนไลน์24ชม
how to get generic tadacip price
Хотите быстро оформить [url=https://limazaim.ru]займы онлайн[/url]? Мы предлагаем выгодные решения на привлекательных условиях.
Pills information sheet. What side effects can this medication cause?
can i purchase cheap elavil online
Some news about medicines. Get now.
Hello! Quick question that’s completely off topic. Do you know how to make your site mobile friendly? My site looks weird when viewing from my iphone4. I’m trying to find a theme or plugin that might be able to correct this problem. If you have any recommendations, please share. With thanks!
cost of cheap celebrex no prescription
Medication information sheet. Drug Class.
where can i buy cheap rogaine no prescription
Best information about drugs. Get information here.
cost of cheap celebrex without prescription
st666 app
ST666 – Lựa Chọn Hàng Đầu Trong Thế Giới Cá Cược Trực Tuyến
Trong thời đại mà ngành công nghiệp cá cược trực tuyến đang bùng nổ, việc chọn một nhà cái uy tín là yếu tố quan trọng để đảm bảo trải nghiệm chơi an toàn và đáng tin cậy. ST666 nhanh chóng khẳng định vị thế của mình trên thị trường với những dịch vụ chất lượng và hệ thống bảo mật cao cấp, mang lại trải nghiệm cá cược công bằng, thú vị và an toàn.
Hệ Thống Trò Chơi Đa Dạng
ST666 cung cấp một danh mục trò chơi cá cược đa dạng, đáp ứng mọi nhu cầu và sở thích của người chơi. Từ thể thao, bắn cá, game bài, cho đến xổ số và live casino, tất cả đều được tối ưu hóa để mang lại cảm giác hứng thú cho người tham gia. Đặc biệt, với Live Casino, người chơi sẽ được trải nghiệm cá cược với các dealer thật thông qua hình thức phát trực tiếp, tạo cảm giác như đang tham gia tại các sòng bài thực tế.
Tỷ Lệ Cược Cạnh Tranh
Một trong những ưu điểm nổi bật của ST666 chính là tỷ lệ cược cực kỳ cạnh tranh, giúp người chơi tối ưu hóa lợi nhuận của mình. Các trận đấu thể thao được cập nhật liên tục với tỷ lệ cược hấp dẫn, tạo cơ hội chiến thắng lớn cho những ai yêu thích cá cược thể thao.
Bảo Mật An Toàn Tuyệt Đối
Yếu tố bảo mật luôn là một trong những tiêu chí hàng đầu khi chọn nhà cái cá cược. ST666 sử dụng công nghệ mã hóa hiện đại để bảo vệ thông tin cá nhân và các giao dịch tài chính của người chơi, đảm bảo mọi dữ liệu luôn được bảo mật tuyệt đối. Người chơi hoàn toàn có thể yên tâm khi tham gia cá cược tại đây.
Chăm Sóc Khách Hàng Chuyên Nghiệp
Dịch vụ chăm sóc khách hàng của ST666 luôn sẵn sàng hỗ trợ 24/7 qua nhiều kênh khác nhau như Live Chat, WhatsApp, Facebook, đảm bảo giải đáp mọi thắc mắc và xử lý các vấn đề nhanh chóng. Đội ngũ nhân viên tại đây được đào tạo chuyên nghiệp, tận tâm và chu đáo, luôn đặt lợi ích của khách hàng lên hàng đầu.
Ưu Đãi Hấp Dẫn
ST666 không chỉ nổi bật với các sản phẩm cá cược mà còn thu hút người chơi bởi các chương trình khuyến mãi hấp dẫn. Người chơi có thể nhận được nhiều ưu đãi như 280k miễn phí khi đăng nhập hàng ngày, cùng các chương trình thưởng nạp và hoàn tiền liên tục, giúp tối đa hóa cơ hội chiến thắng.
Lý Do ST666 Là Lựa Chọn Hàng Đầu
Sự kết hợp hoàn hảo giữa giao diện hiện đại, hệ thống trò chơi đa dạng, dịch vụ khách hàng tận tâm và tỷ lệ cược cạnh tranh đã giúp ST666 trở thành một trong những nhà cái cá cược trực tuyến uy tín hàng đầu tại Việt Nam. Đối với những ai đang tìm kiếm một nhà cái an toàn và chuyên nghiệp, ST666 chắc chắn sẽ là lựa chọn không thể bỏ qua.
Kết Luận
Với những ưu điểm vượt trội, ST666 xứng đáng là địa chỉ cá cược uy tín và an toàn cho tất cả người chơi. Đăng ký ngay hôm nay để trải nghiệm hệ thống cá cược đẳng cấp và nhận những ưu đãi hấp dẫn từ ST666!
Вавада казино — Игры с живыми дилерами и атмосфера Las Vegas
https://www.azdorovia.ru/oformlenie-medicinskoj-knizhki.html
Drugs prescribing information. What side effects?
get levitra prices
Everything what you want to know about meds. Read information now.
can you buy clomid for sale
Medicine information. Generic Name.
where can i get clomid no prescription
Best news about drugs. Get now.
When I originally commented I seem to have clicked the -Notify me when new comments are added- checkbox and now every time a comment is added I recieve 4 emails with the same comment. There has to be a means you are able to remove me from that service? Appreciate it!
where to get cheap lipitor online
Появились непредвиденные расходы? Теперь вы имеете возможность получить деньги в долг в Минске на справедливых условиях всего за короткое время.
Attractive section of content. I just stumbled upon your weblog and
in accession capital to assert that I acquire actually enjoyed account your
blog posts. Anyway I will be subscribing to your feeds and even I achievement you access consistently quickly.
Also visit my blog post :: what is prodentim made of
I blog quite often and I genuinely appreciate your information. Your article has truly peaked my interest.
I’m going to take a note of your site and keep checking for new information about once a
week. I opted in for your Feed as well.
Also visit my webpage; tonic greens reviews
Meds information. What side effects?
how to buy generic neurontin without rx
Some news about medicine. Read here.
where to buy generic nimotop tablets
Drugs information for patients. Cautions.
buying kamagra for sale
Actual trends of drugs. Read information now.
Currently it appears like WordPress is the top blogging platform out there
right now. (from what I’ve read) Is that what you’re using on your blog?
my web site :: tonic greens official site
generic celebrex without a prescription
Excellent article. Keep writing such kind of info on your blog.
Im really impressed by it.
Hello there, You’ve done a fantastic job. I will certainly digg
it and for my part suggest to my friends. I’m sure they’ll be benefited from this site.
My site: plantsulin blood sugar support
Medicament prescribing information. What side effects?
order lasix for sale
Everything trends of medicines. Get information here.
cost generic diovan
Medicine information. Brand names.
where buy generic macrobid no prescription
All trends of medicines. Get information now.
It is perfect time to make a few plans for the longer term and it is time to be happy. I have learn this put up and if I may just I desire to counsel you some fascinating things or advice. Maybe you could write subsequent articles relating to this article. I wish to learn more issues approximately it!
where buy cheap glucotrol pill
Meds information for patients. What side effects?
can i purchase cheap phenytoin online
Actual what you want to know about medicament. Get now.
смотреть порно
Article Marketing — Using Html Meta Tags For Higher Search Engine Rankings 구글 검색엔진최적화
bs2best at
https://dzen.ru/a/Zs4W11E2jHQ2J7ic
Pills information leaflet. What side effects?
where buy cheap rizatriptan tablets
All news about drug. Get now.
bs2best
проститутки
bs2site at
bs2best at
Необходимы средства немедленно? Оформите займ на карту и переведите деньги всего за несколько минут.
เนื้อเรื่อง ของบล็อกนี้ เร้าใจมากๆ ครับ ผมชอบวิธีการ ศึกษาประเด็นต่างๆ อย่าง ถี่ถ้วน และ มีความสมเหตุสมผล ชัดเจน เป็นการช่วยให้ผู้อ่าน ทำให้เข้าใจประเด็นได้
อย่างถ่องแท้มากขึ้น คุณเขียนได้อย่างเป็นระบบ และน่าติดตาม ซึ่งเป็นสิ่งสำคัญสำหรับบทความระดับนี้
นอกจากนั้น ผมยังชอบ ทัศนะ ใหม่ๆ
ที่คุณได้นำเสนอ ซึ่งเป็นสิ่งที่ไม่เคย คิดมาก่อน มันช่วยขยาย
ทัศนคติ และ ความรู้ ของผมไปในทิศทางที่ กว้างขวางขึ้น ผมขอขอบคุณที่คุณได้ แชร์ ความรู้และ ความสามารถของคุณ มันช่วยให้ผมได้
พัฒนาตัวเอง มากขึ้นอย่างแน่นอน
ผมหวังว่าจะได้ สร้างปฏิสัมพันธ์บทความอื่นๆ ของคุณในอนาคตเช่นกัน เพราะผมมั่นใจว่าจะมี ความสำคัญและเป็นการเพิ่มพูน ความรู้ให้กับผมอย่างแน่นอน ขอบคุณมากครับ!
Feel free to visit my web-site :: สูตรในการแทงบอลออนไลน์ (kendallskaaning.livejournal.com)
bs02.at
Excellent Feedback to Personal Site Feedback
Wonderful piece! I’m truly appreciating the text in this blog.
Acquire you once pondered on obtaining into online betting wagering?
Evolution Gambling is a brilliant company
with a extensive range of exceptional dynamic table manager products.
The whole affair is outstandingly captivating and genuine,
it presents itself as analogous to you’re right within the casino within the real gaming establishment.
On the condition you’re inclined concerning giving that more, I’d be delighted to ecstatic to provide my exclusive referral URL.
Evolution encompasses a amazing signup incentive
for new new participants. It undoubtedly unquestionably
beneficial looking into more should you’re desiring a new virtual gambling journey.
Thankfulness additionally in favor of the amazing digital diary subject matter.
Uphold going the brilliant undertakings!
Here is my site: gambling virtual reality
https://dzen.ru/a/ZvKb6-S_8i8hIBZp
Medication information. Effects of Drug Abuse.
buy singulair online without prescription
Best trends of meds. Get information now.
проститутки
It’s an remarkable article in support of all the internet viewers; they will get benefit from it I am sure.
https://dzen.ru/a/ZtD4PC-neEJ3P1gp
Accomplished Reading a Blog Post: A Formal Response to the Comment Section and an Invitation to Join «KING855»
‘After diligently perusing the blog post, I would like to
furnish the following commentary to the forum.
Your observations on the theme were quite thought-provoking .
I found myself in concurrence with many of the claims you
mentioned .
It is encouraging to witness such an stimulating exchange
unfolding.
If you are interested in additional examining
this subject matter , I would sincerely invite you to participate
in the «KING855» platform. There , you will have the opportunity to
interact with kindred spirit participants and explore further into these fascinating themes .
I believe your involvement would be a meaningful addition
to the dialogue.
Appreciate your contribution , and I look forward to the prospect of continuing this
stimulating exchange .
Also visit my web-site online casino leaderboards
Если в экстренном порядке нужны средства, вы всегда можете взять займ в Минске онлайн без долгих ожиданий.
Drugs information. Drug Class.
where can i buy generic clomid no prescription
Best what you want to know about drug. Get now.
Быстрый серак/ВПС/ВДС под парсинг, постинг, разгадывание каптчи.
https://t.me/s/server_xevil_xrumer_vpsvds_zenno
Сервер для Xrumer |Xevil | GSA | Xneolinks | A-parser | ZennoPoster | BAS | Антидетект браузер Dolphin
— Windows — 2012 R2, 2016, 2019, 2022 — бесплатно
— Outline VPN, WireGuard VPN, IPsec VPN.
— Супер (аптайм, скорость, пинг, нагрузка)
— FASTPANEL и HestiaCP — бесплатно
— Отлично подходит под Xneolinks
— Автоматическая установка Windows — бесплатно
— Почасовая оплата
— Дата-центр в Москве и Амстердаме
— Круглосуточная техническая поддержка — бесплатно
— Для сервера сеть на скорости 1 Гбит!
— Отлично подходит под GSA Search Engine Ranker
— Скорость порта подключения к сети интернет — 1000 Мбит/сек
— Управляйте серверами на лету.
— Отлично подходит под XRumer + XEvil
— Ubuntu, Debian, CentOS, Oracle 9 — бесплатно
— Быстрые серверы с NVMe.
— Отлично подходит под CapMonster
— Windows — 2022, 2019, 2016, 2012 R2
— Возможность арендовать сервер на 1 час или 1 сутки
— Отлично подходит под A-Parser
— Более 15 000 сервер уже в работе
— Мгновенное развёртывание сервера в несколько кликов — бесплатно
Medicament information sheet. Cautions.
order cheap elavil without insurance
Best news about drugs. Get information here.
Informative article, exactly what I wanted to find.
Medication information for patients. What side effects can this medication cause?
how can i get rogaine prices
Everything information about medication. Read now.
Medicines prescribing information. Generic Name.
can i get olmesartan pill
Actual trends of pills. Get here.
Нуждаетесь в средств на неотложные нужды? Узнайте, как оперативно получить деньги в долг без поручителей.
Drug information for patients. Cautions.
where to buy generic phenytoin without a prescription
All about drug. Get now.
Купить безабузный server/ВПС/ВДС под парсинг, постинг, разгадывание каптчи.
https://t.me/s/server_xevil_xrumer_vpsvds_zenno
Сервер для Xrumer |Xevil | GSA | Xneolinks | A-parser | ZennoPoster | BAS | Антидетект браузер Dolphin
— Мгновенное развёртывание сервера в несколько кликов — бесплатно
— Ubuntu, Debian, CentOS, Oracle 9 — бесплатно
— Почасовая оплата
— FASTPANEL и HestiaCP — бесплатно
— Автоматическая установка Windows — бесплатно
— Более 15 000 сервер уже в работе
— Круглосуточная техническая поддержка — бесплатно
— Windows — 2022, 2019, 2016, 2012 R2
— Для сервера сеть на скорости 1 Гбит!
— Быстрые серверы с NVMe.
— Возможность арендовать сервер на 1 час или 1 сутки
— Отлично подходит под GSA Search Engine Ranker
— Отлично подходит под A-Parser
— Скорость порта подключения к сети интернет — 1000 Мбит/сек
— Windows — 2012 R2, 2016, 2019, 2022 — бесплатно
— Отлично подходит под Xneolinks
— Отлично подходит под CapMonster
— Outline VPN, WireGuard VPN, IPsec VPN.
— Дата-центр в Москве и Амстердаме
— Отлично подходит под XRumer + XEvil
— Супер (аптайм, скорость, пинг, нагрузка)
— Управляйте серверами на лету.
Meds information for patients. Effects of Drug Abuse.
how to get ipratropium for sale
Actual trends of medicines. Get here.
Its like you read my mind! You seem to know a lot about this, like you wrote the book in it or something. I think that you could do with a few pics to drive the message home a bit, but instead of that, this is magnificent blog. A fantastic read. I will certainly be back.
So how do bacteria find their way in there?
You can be assured of good quality and correct diplomat pharmacy lipitor as they provide reliable reviews. Always get the best deal!
Angina is chest pain that occurs in people who have coronary heart disease, usually when they’re active.
Many people assume that there are no other options available, but an evaluation by a doctor can start patients on the path toward relief, Fisher says.
There are ways to rx meaning in pharmacy to treat your condition
There is also an increased tendency for members of these families to have various types of perceptual learning problems and dyslexia.
Drug information. What side effects?
buy cheap ramipril tablets
Some trends of drug. Get information here.
Townsend CM Jr, et al.
More offers at can you mix viagra and cialis at any site, check out its composition too.
Symptoms Weakness, fatigue, and a run-down feeling may be the first signs of anemia.
Telephone triage advice can also encourage unnecessary care seeking.
Heat up your body with the newest product of canadian pharmacy cialis Prevent ED by reading this
The Antibiotic Paradox: How misuse of antibiotics destroys their curative powers.
https://zhimlezha.ru/kak-uluchshit-sluh.php
Accomplished Reading a Blog Post: A Formal Contribution to
the Comment Section and an Invitation to Join «KING855»
‘After extensively examining the blog post, I would like to furnish the following reply to the discussion .
Your insights concerning the theme were quite fascinating.
I found myself in concurrence with a number
of the ideas you brought up .
It is heartening to witness such an engaging
exchange unfolding.
If you are keen in further examining this issue , I would sincerely urge you to
participate in the «KING855» group . In that space, you will have the
chance to interact with like-minded members and dive deeper
into these captivating topics .
I am convinced your involvement would be a valuable addition to the discussion .
Appreciate your remarks, and I look forward to the possibility
of extending this enriching dialogue .
Feel free to visit my page online casino software providers
https://www.ceyloncampus.lk/index.php/2024/09/23/snjat-kvartiru-na-sutki-v-minske-dlja-vecherinki-2/
where buy suprax prices
Ищете быстрый способ оформить деньги на карту? Мы предлагаем лучшие условия для быстрого оформления.
https://zhimlezha.ru/kak-uluchshit-sluh.php
Dystonia can be associated with numerous diseases and conditions.
You can https://cilisfastmed.com/ do you need a prescription for cialis pills using this comparative listing
Such test results may be useful for disability evaluation when corroborated by other evidence, including results from other psychological tests and information obtained in the course of the clinical evaluation, from treating and other medical sources, other professional health care providers, and nonmedical sources.
Histamine also can cause sneezing, itching, irritation, and excess mucus production, which can result in allergic rhinitis.
Immediately identify low prices and https://cilisfastmed.com/ liquid cialis after you compare online offerings
Diabetes Signs and Diagnosis Diabetes is often called a «silent» disease because it can cause serious complications even before you have symptoms.
https://maarten.wedenkenaanje.nl/uncategorized/kvartiry-na-sutki-v-grodno-tenancy-by-36-2/
can you buy suprax without a prescription
His focus on patients with chronic illness led him to the realization that chronic Lyme disease was an important part of these conditions.
Low price of https://ivermectinfastmed.com/ ivermectin 0.5 lotion india . Put ED a stop!
New computer-assisted technologies allow doctors to construct 3D radiation fields that accurately target tumor tissue while avoiding injury to important brain structures like the hearing centers.
Great blog here! Also your web site loads up fast!
What web host are you using? Can I get your affiliate link to your host?
I wish my web site loaded up as quickly as yours lol
my website; the lottery defeated software
That said, some symptoms that correlate strongly with exposure to HIV two to four weeks after, most commonly include: feverweight losslarge tender lymph nodesthroat inflammationa rashheadachesores of the mouth and genitalsgastrointestinal symptoms such as nausea, vomiting or diarrheaneurological symptoms of peripheral neuropathyThe duration of the symptoms varies, but is usually one or two weeks.
Prevention is better than cure for ED. Click this link https://ivermectinfastmed.com/ ivermectin 12 Online pharmaci
Even if the dog appears to be recovering, take him to your veterinarian as soon as possible.
https://zhimlezha.ru/kak-uluchshit-sluh.php
Nice blog here! Also your web site loads up very fast! What host are you using? Can I get your affiliate link to your host? I wish my web site loaded up as quickly as yours lol
http://rubymsltd.co.uk/kvartiry-na-sutki-v-minske-cnjat-kvartiru-18/
buying cheap celexa without prescription
https://fortunevision.ca/2024/09/18/snjat-kvartiru-na-sutki-v-minske-arenda-kvartir-8-2/
where to get indocin without a prescription
can i order generic tofranil tablets
https://singletrek.id/2024/09/23/snjat-kvartiru-v-minske-na-sutki-nedorogo-bez-19/
Good day! I could have sworn I’ve been to this site before but after reading through some of the post I realized it’s new to me. Nonetheless, I’m definitely happy I found it and I’ll be book-marking and checking back frequently!
cost artane for sale
https://nousa.net/snjat-kvartiru-na-sutki-v-grodno-nedorogo-arenda-44/
Если незамедлительно нужны средства, вы всегда можете взять займ в Минске онлайн без лишних документов.
where can i buy cheap tenormin for sale
https://propertylink.financial/snjat-kvartiru-na-sutki-v-minske-posutochnaja-11-2/
can i buy cheap prevacid price
https://celmaimarecolind.ro/snjat-kvartiru-na-sutki-v-minske-dlja-vecherinki/
Hey There. I found your blog using msn. This is an extremely well written article. I’ll make sure to bookmark it and come back to read more of your useful information. Thanks for the post. I’ll definitely comeback.
https://brookstiviv.mybjjblog.com/the-price-and-value-of-a-sporting-activities-betting-procedure-43695803
buy cheap tenormin for sale
It is the best time to make some plans for the future
and it is time to be happy. I’ve read this post and if I could I desire to suggest you few interesting things or tips.
Maybe you can write next articles referring to this article.
I desire to read more things about it!
Look at my webpage :: lottery defeater software reviews
https://khmerlancer.com/kvartiry-na-sutki-v-grodno-nedorogo-ceny-snjat-16/
The Difference Between The Eb5 Green Card And The Eb2 Visa 버팀목 대출
where buy cheap zetia no prescription
Теперь всё просто и удобно! деньги на карту зачисляются в течение нескольких минут, без документов.
where can i get generic reglan without dr prescription
https://reforesttheworld.us/kvartiry-na-sutki-v-minske-500-bez-posrednikov-28/
where can i buy cheap nizoral without a prescription
https://jserajululoom.wordpress.com/2024/09/18/kvartira-na-sutki-v-grodno-nedorogo-ceny-snjat-14/
Howdy very nice website!! Guy .. Excellent .. Wonderful .. I will bookmark your blog and take the feeds additionally? I am happy to seek out a lot of helpful info right here within the publish, we need develop more strategies on this regard, thanks for sharing. . . . . .
актуальное зеркало kometa casino
Kometa Casino: Идеальный вариант для любителей игр на удачу
В случае если вы интересуетесь азартными играми и ищете площадку, что предлагает широкий выбор слотов и живых казино, а также щедрые бонусы, Kometa Casino — это тот сайт, на котором вы найдете незабываемый опыт. Предлагаем рассмотрим, какие факторы делает Kometa Casino таким особенным и почему игроки остановились на этой платформе для своих развлечений.
### Ключевые черты Казино Kometa
Казино Kometa — это глобальная игровая платформа, что была запущена в 2024 году и уже получила внимание клиентов по глобально. Вот ключевые черты, что отличают данную платформу:
Функция Описание
Год создания 2024-й
География Доступа Всемирная
Объем игр Более 1000
Лицензия Curacao
Мобильная Версия Присутствует
Варианты оплаты Популярные платежные системы
Служба поддержки Круглосуточная поддержка
Бонусы и Акции Акции и бонусы
Система безопасности SSL Шифрование
### Зачем играют в Kometa Casino?
#### Система поощрений
Одной из ключевых фишек Kometa Casino становится система бонусов. Чем активнее играете, тем лучше призы и бонусы. Программа имеет 7 этапов:
— **Земля (уровень 1)**: Кэшбек 3% 3% от затрат за неделю.
— **Уровень 2 — Луна**: 5% кэшбек на ставки от 5 000 до 10 000 рублей.
— **Уровень 3 — Венера**: Кэшбек 7% при игре от 10 001 до 50 000 ?.
— **Уровень 4 — Марс**: Возврат 8% при сумме ставок от 50 001 до 150 000 ?.
— **Юпитер (уровень 5)**: Возврат 10% при общей ставке свыше 150 000 рублей.
— **Уровень 6 — Сатурн**: 11% бонуса.
— **Уровень 7 — Уран**: Максимальный кэшбек максимум 12%.
#### Постоянные бонусы
Чтобы держать азарт на высоте, Kometa Casino проводит бонусы каждую неделю, возврат средств и бесплатные вращения для новичков. Постоянные подарки помогают удерживать внимание на каждой стадии игры.
#### Большое количество развлечений
Более 1000 игр, включая игровые машины, карточные игры и живое казино, делают Kometa Casino местом, где любой найдет развлечение на вкус. Вы можете наслаждаться стандартными автоматами, так и новейшими играми от лучших поставщиков. Живые дилеры добавляют игровому процессу настоящее казино, формируя атмосферу азартного дома.
where can i get generic nortriptyline pills
can i purchase generic imuran pills
https://prorooter.us/?p=7837
การเล่น «หวยฮานอย» เป็นอีก ช่องทาง หนึ่งที่ได้รับ ความต้องการ
จาก ชาวไทย ในการเสี่ยงโชค เมื่อ ดูเสมือน การ ทำ หวยรัฐบาลหรือ»หวยลาว» ความน่าสนใจ ของ»หวยฮานอย«คือ การ จัดการลุ้นรางวัล ทุกวัน ส่งผลให้ผู้ พนัน สามารถลุ้นรับ ได้บ่อยครั้ง และมีโอกาส สร้าง รายได้เสริม
จากการ พนัน หวย
อย่างไรก็ตาม การ พนัน «หวยฮานอย» ก็ไม่ปราศจาก
เนื่องจากผู้ ลุ้น บางรายอาจ เสี่ยง มากเกินไปหรือติด
การพนัน ซึ่งอาจ ทำให้เกิดผลลบ ต่อ ความสัมพันธ์ นอกจากนี้ ยังมีความเสี่ยง
เรื่อง การทุจริต จากผู้ที่ ต้องการทำเงิน โดยมิชอบ
เพื่อให้การ ทำ «หวยฮานอย» เป็นเพียงการ เล่นเพื่อความมุ่งหวัง เพื่อ ความเพิ่มพูน และ ไม่ทำให้เกิดปัญหาตามมา จึงควรมีการควบคุม และ จัดการ อย่างใกล้ชิด เช่น การ จัดทำ กรอบเวลา ในการ พนัน ที่ สมควร รวมถึงการ ดูแล ผู้ ละเมิด ทั้งนี้เพื่อให้การ พนัน
«หวยฮานอย» เป็นส่วนหนึ่งของการ ใช้เวลา อย่าง ระลึกถึงผู้อื่น และไม่ส่งผลกระทบ
ชีวิต ของผู้ ทำ
Superb Reply to Online Journal Comment
Amazing piece! I’m definitely enjoying the topic on this forum.
Acquire you previously considered in relation to gaining encompassed by online
betting gaming activities? Evolution Gaming Site is a incredible
website with a extensive choice of superior immersive gaming host titles.
The entire encounter is unbelievably engrossing and authentic, it is equivalent to you’re directly in the gaming
establishment in the actual gaming.
Should you’re curious on the topic of experiencing the offering further, I’d be delighted to thrilled to give my own recommendation online location. Evolution Gaming offers
a amazing welcome incentive for curious first-time enthusiasts.
It’s definitely worth exploring furthermore on the condition you’re seeking a modified internet playing journey.
Gratefulness again pertaining to the excellent digital diary
subject matter. Preserve at the wonderful efforts!
Also visit my page; online casino fraud prevention
I every time spent my half an hour to read this webpage’s articles or reviews every day along with
a mug of coffee.
Look at my blog post; LipoZem Weight Loss
buying generic celebrex without insurance
buying uroxatrall for sale
https://autostem.in/kvartiry-na-sutki-v-minske-svobodnye-segodnja-37-2/
фриспины за регистрацию без депозита без вейджера
can i order cheap advair diskus without a prescription
can you buy cheap cipro pills
https://prvabrazda.rs/2024/09/23/tjegi-dlja-poiska-kvartira-na-sutki-minsk-22/
how to buy imitrex prices
Продажа лазерных станков для резки металла
Наша компания предлагает современные лазерные станки для резки металла, труб и листов. Мы предлагаем оборудование высочайшего качества для бизнеса любого масштаба.
лазерная резка металла станок лазерная резка чпу .
https://p3mediafrica.com/snjat-dvuhkomnatnuju-kvartiru-na-sutki-v-grodno-4/
Hello there! I could have sworn I’ve been to this website before but after checking through some of the post I realized it’s new to me. Anyways, I’m definitely delighted I found it and I’ll be bookmarking and checking back often!
where can i buy cephalexin price
แพะ เพิ่งเพียง อ่านบล็อกนี้ และรู้สึกตื่นตะลึง มาก!
เหตุการณ์ ที่น่าสนใจพร้อมกับ รายละเอียดซึ่ง ครบถ้วน ทำให้ผมได้รับแง่มุม ใหม่ๆ
มากมาย ผมชอบเทคนิค ที่คุณพิจารณา ประเด็นต่างๆ อย่างถี่ถ้วน และนำเสนอ แนวคิดที่น่าสนใจ ผมเห็นด้วยในความเห็น
หลายจุดที่คุณกล่าวถึง และมองว่าเป็นเรื่องซึ่งสำคัญและควรได้รับการตรวจสอบ อย่างถี่ถ้วน
นอกจากนี้ ผมยังรู้สึกประทับใจ ความแปลกใหม่ ในการนำเสนอ เนื้อหา
การใช้ภาษา ที่ใช้เข้าใจง่าย และการตกแต่ง
ที่น่าสนใจ ทำให้ อ่านแล้วไม่รู้สึกเบื่อ เป็นบล็อกที่ยอดเยี่ยม และน่าติดตามอย่างมาก
ชื่นชมยินดี ที่แบ่งปันมุมมอง และมุมมอง
ที่น่าสนใจ ผมรอแวะมาติดตาม ที่จะอ่านบทความอื่นๆ ของคุณในระยะเวลาอันใกล้ และหวังว่าจะได้มีแรงจูงใจ
อภิปราย ความรู้สึก กับคุณเช่นกัน
My website: ดู หวยออนไลน์
https://sanj.com.my/2024/09/19/kvartiry-na-sutki-minsk-ceny-tvoj-ostrov-7/
can you get starlix pills
Thank you for the auspicious writeup. It in fact was a amusement
account it. Look advanced to far added agreeable from you!
However, how can we communicate?
my blog post :: alpha bites buy
Hmm it seems like your blog ate my first comment (it was extremely long) so I guess
I’ll just sum it up what I had written and say, I’m thoroughly enjoying your blog.
I too am an aspiring blog writer but I’m still
new to the whole thing. Do you have any tips for
novice blog writers? I’d certainly appreciate it.
My blog post — nitric boost reviews
Комплексное техническое обслуживание лазерных станков
Наша компания предлагает комплексное техническое обслуживание лазерных станков.
станок для резки листового металла станок для лазерной резки .
https://silviapmanjavacas.com/kvartiry-na-sutki-v-minske-cnjat-kvartiru-21/
Команда мегааптека.ру включает высококвалифицированных специалистов, таких как Провизор Асанова Наталья Геннадьевна, которые помогают подобрать подходящие лекарства. Важно отметить и опыт специалистов, таких как Провизор Подойницына Алёна Андреевна, которые способствуют качественному обслуживанию. На сайте magapteka.ru можно получить консультацию провизоров.
Команда мегааптека.ру гордится нашими квалифицированными специалистами, включая профессионала Асанову Наталью, провизора Юлию Рипатти, а также провизора Зотину Наталью Игоревну. Наш врач Кристина Богданова всегда готов оказать профессиональную помощь.
Провизор Подойницына Алёна Андреевна, провизор Долгих Наталия Вадимовна, а также провизор Ибраева Екатерина Анатольевна обеспечивают высокий уровень обслуживания и помощи.
Наши кандидаты фармацевтических наук: Шильникова Светлана Владимировна – квалифицированные специалисты, которые предоставляют консультации по анализу рецептов. Также с вами работает провизор Черенёва Анастасия, оказывая поддержку клиентам на высоком уровне.
В мега аптека вы найдете нужные препараты с помощью нашей опытной команды специалистов.
https://elantxobekomendimartxa.com/2024/09/18/snjat-kvartiru-na-sutki-v-grodno-nedorogo-arenda-6/
Hello There. I discovered your weblog the usage of msn. That is a very neatly written article. I will make sure to bookmark it and return to learn more of your useful info. Thank you for the post. I’ll definitely comeback.
https://www.dynapost.com/snjat-kvartiru-na-sutki-v-minske-arenda-kvartir-6-2/
That is a really good tip especially to those fresh to the blogosphere.
Simple but very accurate info… Appreciate your sharing this
one. A must read post!
My blog post … nitric boost powder amazon
https://pacman168vip.com/ยกขบวนเกมสล็อตยอดฮิตจากค่ายดังต่างประเทศ
how to buy lipitor without insurance
how to buy aristocort without dr prescription
Medicine prescribing information. Generic Name.
get fluoxetine without rx
Best about meds. Get here.
Wow tons of terrific information.
Also visit my homepage :: https://www.cucumber7.com/
https://м-мастер.рф/
how to buy generic tetracycline without prescription
Admiring the time and energy you put into your website and in depth information you offer.
It’s great to come across a blog every once in a while that isn’t the same outdated rehashed material.
Fantastic read! I’ve saved your site and I’m adding your
RSS feeds to my Google account.
https://interface.tn/grodno-snjat-kvartiru-na-sutki-pochemu-jeto-stoit-18/
регистрация перехода права собственности на земельный участок
https://mystorekala.com/snjat-kvartiru-na-sutki-v-minske-arenda-kvartir-46/
межевание границ участка
https://kilotechusa.com/kvartiry-dlja-komandirovannyh-snjat-kvartiru-na-40/
как зарегистрировать дом
Игровой автомат 88 Dragons Bounty также
известен под названием 88 драгон баунти слот.
Это один-одинёшенек из самых популярных слотов
среди любителей азартных игр благодаря своей увлекательной тематике и возможности выиграть
крупные призы. Слот 88 Dragons Bounty доступен во множестве
казино и онлайн игровых платформ.
Игроки могут блаженствовать игрой будто на деньги,
этак и в демо-режиме, дабы попробовать свои силы перед тем, чисто делать
реальные ставки. В игре присутствуют разнообразные бонусные возможности, которые
делают игровой процесс еще более увлекательным и выгодным для игроков.
88 Dragons Bounty — это увлекательный игровой автомат, кой переносит вас в
захватывающий мироздание драконов и богатства.
Этот слот предлагает захватывающий игровой процесс, бездна
выигрышных комбинаций
и увлекательные бонусные потенциал.
Давайте рассмотрим эту игру подробнее.
Фриспины: Возможность получить
бесплатные вращения барабанов и приумножить свои шансы на выигрыш.
Thanks a lot, A good amount of forum posts!
my web site — http://www.ezitec.co.kr/board/1610010
can i buy cheap synthroid for sale
이용 안내 및 주요 정보
배송대행 이용방법
배송대행은 해외에서 구매한 상품을 중간지점(배대지)에 보내고, 이를 통해 한국으로 배송받는 서비스입니다. 먼저, 회원가입을 진행하고, 해당 배대지 주소를 이용해 상품을 주문한 후, 배송대행 신청서를 작성하여 배송 정보를 입력합니다. 모든 과정은 웹사이트를 통해 관리되며, 필요한 경우 고객센터를 통해 지원을 받을 수 있습니다.
구매대행 이용방법
구매대행은 해외 쇼핑몰에서 직접 구매가 어려운 경우, 대행 업체가 대신 구매해주는 서비스입니다. 고객이 원하는 상품 정보를 제공하면, 구매대행 신청서를 작성하고 대행료와 함께 결제하면 업체가 구매를 완료해줍니다. 이후 상품이 배대지로 도착하면 배송대행 절차를 통해 상품을 수령할 수 있습니다.
배송비용 안내
배송비용은 상품의 무게, 크기, 배송 지역에 따라 다르며, 계산기는 웹사이트에서 제공됩니다. 부피무게가 큰 제품이나 특수 제품은 추가 비용이 발생할 수 있습니다. 항공과 해운에 따른 요금 차이도 고려해야 합니다.
부가서비스
추가 포장 서비스, 검역 서비스, 폐기 서비스 등이 제공되며, 필요한 경우 신청서를 작성하여 서비스 이용이 가능합니다. 파손 위험이 있는 제품의 경우 포장 보완 서비스를 신청하는 것이 좋습니다.
관/부가세 안내
수입된 상품에 대한 관세와 부가세는 상품의 종류와 가격에 따라 부과됩니다. 이를 미리 확인하고, 추가 비용을 예상하여 계산하는 것이 중요합니다.
수입금지 품목
가스제품(히터), 폭발물, 위험물 등은 수입이 금지된 품목에 속합니다. 항공 및 해상 운송이 불가하니, 반드시 해당 품목을 확인 후 주문해야 합니다.
폐기/검역 안내
검역이 필요한 상품이나 폐기가 필요한 경우, 사전에 관련 부가서비스를 신청해야 합니다. 해당 사항에 대해 미리 안내받고 처리할 수 있도록 주의해야 합니다.
교환/반품 안내
교환 및 반품 절차는 상품을 배송받은 후 7일 이내에 신청이 가능합니다. 단, 일부 상품은 교환 및 반품이 제한될 수 있으니 사전에 정책을 확인하는 것이 좋습니다.
재고관리 시스템
재고관리는 배대지에서 보관 중인 상품의 상태를 실시간으로 확인할 수 있는 시스템입니다. 재고 신청을 통해 상품의 상태를 확인하고, 필요한 경우 배송 또는 폐기 요청을 할 수 있습니다.
노데이타 처리방법
노데이타 상태의 상품은 배송 추적이 어려운 경우 발생합니다. 이런 경우 고객센터를 통해 문의하고 문제를 해결해야 합니다.
소비세환급 및 Q&A
일본에서 상품을 구매할 때 적용된 소비세를 환급받을 수 있는 서비스입니다. 해당 신청서는 구체적인 절차에 따라 작성하고 제출해야 합니다. Q&A를 통해 자주 묻는 질문을 확인하고, 추가 문의 사항은 고객센터에 연락해 해결할 수 있습니다.
고객지원
고객센터는 1:1 문의, 카카오톡 상담 등을 통해 서비스 이용 중 발생하는 문제나 문의사항을 해결할 수 있도록 지원합니다.
서비스 관련 공지사항
파손이 쉬운 제품의 경우, 추가 포장 보완을 반드시 요청해야 합니다.
가스제품(히터)은 통관이 불가하므로 구매 전 확인 바랍니다.
항공 운송 비용이 대폭 인하되었습니다.
https://inlandendocrine.com/arenda-nedvizhimosti-na-sutki-baraholka-onliner-by-3/
оформление земельного участка в собственность
https://dzen.ru/a/Zsxi2-ZblHIcfXfg
https://swdi.com.ar/2024/09/23/kvartiry-na-sutki-v-minske-cnjat-kvartiru-10/
I like the helpful info you provide in your articles. I will bookmark your weblog and check again here regularly. I’m quite sure I will learn a lot of new stuff right here! Best of luck for the next!
Bet9ja has emerged as a top sports betting platform in Nigeria.
Featuring a diverse selection of sports betting options, the Bet9ja
site offers an engaging experience for bettors.
One of the main attractions of Bet9ja is its enticing welcome bonus.
New users can claim the Bet9ja promotion code when signing up to get a 170% bonus on their first
deposit. This promotional offer enables bettors to increase their betting power
right from the start.
For those looking to begin, the Bet9ja registration process is
user-friendly. Navigate to the official Bet9ja platform and
provide the necessary information. Remember to use the Bet9ja promotion code
2024 to secure your sign-up incentive.
Once registered, Bet9ja users can enjoy a range of options.
The Bet9ja sportsbook includes major competitions like the
Champions League, as well as diverse sporting events.
For those seeking additional excitement, the casino section provides a selection of gambling choices.
From slots to table games, there’s a diverse array of choices.
Users can also benefit from various promotions, including the popular accumulator
bonus. This bonus enhances the prospective returns on multiple
bets, adding extra value for experienced gamblers.
Mobile users can use the Bet9ja mobile site, ensuring betting opportunities are easily accessible.
The smartphone interface delivers a user-friendly interface, permitting users to place bets on the move.
If you encounter any issues, the customer service department
is on hand to provide guidance. Get in touch with the support team through various
channels, ensuring timely support for any problems.
Remember that although promotions are enticing, maintaining control over your wagers should always be a priority.
The site promotes ethical gambling behavior
and offers resources to help users manage their gambling habits.
In summary, this betting site stands out in the
West African gambling landscape. With its easy-to-navigate site, generous bonuses, and comprehensive selection of wagers, it’s no wonder Bet9ja has become a
favorite among sports enthusiasts. Whether you’re a seasoned gambler,
Bet9ja offers an engaging gambling adventure that fosters repeat visits.
How To Play Baccarat — The Most Convenient Way 에볼루션 카지노 리뷰
обязательно ли межевание участка
комета сайт kometa casino
Казино Kometa: Идеальный выбор для ценителей азартного досуга
Если вы интересуетесь азартными играми и ищете платформу, что предлагает большой набор слотов и игр с живыми дилерами, а к тому же выгодные предложения, Казино Kometa — это тот сайт, на котором вы испытаете яркие эмоции. Предлагаем рассмотрим, что делает Kometa Casino уникальным и почему клиенты остановились на этом сайте для досуга.
### Ключевые черты Казино Kometa
Казино Kometa — это всемирная казино, что была создана в 2024-м и сейчас уже получила внимание пользователей по всему миру. Вот основные черты, которые выделяют этот сайт:
Характеристика Описание
Дата запуска 2024
Охват Глобальная
Объем игр Более 1000
Сертификация Лицензия Кюрасао
Поддержка мобильных Доступна
Методы платежей Visa, Mastercard, Skrill
Поддержка Круглосуточная поддержка
Специальные предложения Акции и бонусы
Безопасность SSL Шифрование
### Почему выбирают Kometa Casino?
#### Система поощрений
Одной из самых привлекательных функций Kometa Casino является уникальная программа лояльности. Чем больше ставок, тем выше ваши бонусы. Программа имеет семи уровней:
— **Уровень 1 — Земля**: Кэшбек 3% от затрат за неделю.
— **Луна (уровень 2)**: Кэшбек 5% на ставки от 5 000 до 10 000 ?.
— **Уровень 3 — Венера**: Возврат 7% при ставках от 10 001 до 50 000 RUB.
— **Уровень 4 — Марс**: 8% кэшбек при ставках от 50 001 до 150 000 RUB.
— **Юпитер (уровень 5)**: 10% возврата при ставках свыше 150 000 ?.
— **Сатурн (уровень 6)**: 11% кэшбек.
— **Уран (уровень 7)**: Максимальный возврат до 12%.
#### Еженедельные бонусы и кэшбек
Чтобы держать игровой активности, Казино Kometa предоставляет регулярные бонусы, кэшбек и спины для новичков. Регулярные вознаграждения помогают удерживать внимание на в процессе игры.
#### Широкий выбор игр
Огромное количество развлечений, включая игровые машины, карточные игры и живое казино, создают Казино Kometa местом, где любой найдет развлечение на вкус. Каждый может играть стандартными автоматами, так и новейшими играми от известных разработчиков. Прямые дилеры создают играм еще больше реализма, формируя атмосферу азартного дома.
https://bootiwala.com/2024/09/18/kvartiry-na-sutki-v-grodno-snjat-kvartiru-na-sutki-4/
зарегистрировать дом на земельном участке
https://dzen.ru/a/Zsxf9LjJ5D6iVqBj
https://taq.nfbslembang.sch.id/snjat-kvartiru-v-minske-na-sutki-cena-arendy-9/
вынос точек в натуру цена
https://vk.com/@impastoekb-podgotovka-k-postupleniu-v-hudozhestvennuu-shkolu-ekaterinbu
Подключение модуля nRF24L01 к Arduino — MicroPi
https://www.setyfood.com/طريقه-عمل-اليانسون/
https://www.57events.it/snjat-kvartiru-na-sutki-v-minske-arenda-kvartir-22/
Pills prescribing information. Brand names.
where buy cheap fosamax tablets
Everything information about pills. Read information here.
buying generic protonix for sale
get cheap femara tablets
Meds information sheet. What side effects can this medication cause?
where buy keflex tablets
Actual information about medicine. Read now.
how to buy generic imitrex online
It’s awesome to pay a visit this web page and reading the views of all mates about this piece of writing, while I am also keen of getting experience.
Medication information sheet. What side effects can this medication cause?
buy generic imitrex tablets
Everything about meds. Get information now.
Команда мегааптека.ру включает высококвалифицированных специалистов, таких как Провизор Асанова Наталья Геннадьевна, которые оказывают профессиональные консультации. Важно отметить и опыт специалистов, таких как Кандидат фармацевтических наук Малеева Татьяна Леонидовна, которые обеспечивают надежные рекомендации. На сайте magapteka.ru можно удобно искать лекарства и препараты.
Команда мегааптека.ру рады представить нашими квалифицированными специалистами, включая провизора Асанову Наталью Геннадьевну, специалиста Рипатти Юлию, а также провизора Наталью Зотину. Наш врач-педиатр Богданова Кристина Дмитриевна всегда готов оказать профессиональную помощь.
Провизор Подойницына Алёна Андреевна, провизор Долгих Наталия Вадимовна, а также Екатерина Ибраева обеспечивают высокий уровень обслуживания и помощи.
Наши кандидаты фармацевтических наук: Шильникова Светлана Владимировна – эксперты в своей области, которые готовы помочь по выбору препаратов. Также с вами работает Анастасия Черенёва, оказывая поддержку клиентам на высоком уровне.
В мега аптека вы найдете инструкции по применению с помощью нашей команды профессионалов.
how to get cheap imdur pills
Drug information for patients. Short-Term Effects.
can you buy generic benicar pill
Some about pills. Get information here.
how can i get generic prednisolone without a prescription
cost of celebrex without prescription
Medication prescribing information. Drug Class.
cost generic lasix for sale
Best what you want to know about drugs. Read here.
how to buy cheap zyrtec online
I could not resist commenting. Exceptionally well written!
where can i buy generic maxalt price
Meds prescribing information. What side effects can this medication cause?
buy cheap compazine price
Everything information about medication. Get here.
can i buy generic imuran tablets
Good day! Do you use Twitter? I’d like to follow you if that would be okay. I’m definitely enjoying your blog and look forward to new posts.
Drugs information sheet. Drug Class.
lyrica in canada
Everything information about medicine. Get here.
can i purchase finpecia price
can i get cheap lexapro tablets
Slot Machine Grid Betting — Casino Strategics 에볼루션 체험
Meds prescribing information. What side effects can this medication cause?
where to get cheap paxil without dr prescription
Some trends of medicine. Get information now.
can i get cheap furosemide without a prescription
can you get celebrex prices
Pills information leaflet. Cautions.
buying zocor without prescription
Everything what you want to know about drugs. Read here.
can you buy generic prograf without a prescription
I’d like to find out more? I’d love to find out some additional information.
Attractive component to content. I simply stumbled upon your website and in accession capital to claim that I get actually enjoyed account your blog posts.
Any way I will be subscribing to your feeds or even I success you get entry to consistently
quickly.
can you buy cheap celebrex pill
Medicament information for patients. What side effects can this medication cause?
cheap zithromax online
Some what you want to know about medicament. Get now.
how can i get deltasone without insurance
can i buy tegretol without prescription
buy celexa without insurance
Интересуетесь быстрых и надёжных займах? Тогда вам стоит посетить https://limazaim.ru для выгодных условий.
order cheap prevacid without insurance
cheap aurogra online
https://mastermarketingprinciples.com/ujutnaja-kvartira-v-grodno-grodno-aktualnye-ceny-6/
get imuran prices
Ищите надежные финансовые услуги? Посетите limazaim.ru и ознакомьтесь с необходимую информацию.
NAGAEMPIRE: Platform Sports Game dan E-Games Terbaik di Tahun 2024
Selamat datang di Naga Empire, platform hiburan online yang menghadirkan pengalaman gaming terdepan di tahun 2024! Kami bangga menawarkan sports game, permainan kartu, dan berbagai fitur unggulan yang dirancang untuk memberikan Anda kesenangan dan keuntungan maksimal.
Keunggulan Pendaftaran dengan E-Wallet dan QRIS
Kami memprioritaskan kemudahan dan kecepatan dalam pengalaman bermain Anda:
Pendaftaran dengan E-Wallet: Daftarkan akun Anda dengan mudah menggunakan e-wallet favorit. Proses pendaftaran sangat cepat, memungkinkan Anda langsung memulai petualangan gaming tanpa hambatan.
QRIS Auto Proses dalam 1 Detik: Transaksi Anda diproses instan hanya dalam 1 detik dengan teknologi QRIS, memastikan pembayaran dan deposit berjalan lancar tanpa gangguan.
Sports Game dan Permainan Kartu Terbaik di Tahun 2024
Naga Empire menawarkan berbagai pilihan game menarik:
Sports Game Terlengkap: Dari taruhan olahraga hingga fantasy sports, kami menyediakan sensasi taruhan olahraga dengan kualitas terbaik.
Kartu Terbaik di 2024: Nikmati permainan kartu klasik hingga variasi modern dengan grafis yang menakjubkan, memberikan pengalaman bermain yang tak terlupakan.
Permainan Terlengkap dan Toto Terlengkap
Kami memiliki koleksi permainan yang sangat beragam:
Permainan Terlengkap: Temukan berbagai pilihan permainan seperti slot mesin, kasino, hingga permainan berbasis keterampilan, semua tersedia di Naga Empire.
Toto Terlengkap: Layanan Toto Online kami menawarkan pilihan taruhan yang lengkap dengan odds yang kompetitif, memberikan pengalaman taruhan yang optimal.
Bonus Melimpah dan Turnover Terendah
Bonus Melimpah: Dapatkan bonus mulai dari bonus selamat datang, bonus setoran, hingga promosi eksklusif. Kami selalu memberikan nilai lebih pada setiap taruhan Anda.
Turnover Terendah: Dengan turnover rendah, Anda dapat meraih kemenangan lebih mudah dan meningkatkan keuntungan dari setiap permainan.
Naga Empire adalah tempat yang tepat bagi Anda yang mencari pengalaman gaming terbaik di tahun 2024. Bergabunglah sekarang dan rasakan sensasi kemenangan di platform yang paling komprehensif!
That is a great tip particularly to those new to the blogosphere.
Simple but very precise information… Many thanks for sharing this one.
A must read article!
Take a look at my web page — money wave reviews and complaints
https://gosoluciones.mx/index.php/2024/09/18/studenty-uzhe-nevlijajut-narynok-novosti-belarusi-33-2/
where buy sildigra prices
I’d like to find out more? I’d like to find out more details.
Если незамедлительно нужны средства, вы всегда способны взять займ в Минске онлайн без бумажной волокиты.
https://sellindgemusicfestival.co.uk/arenda-nedvizhimosti-na-sutki-baraholka-onliner-by-29/
can i get generic promethazine prices
Value Your Feedback!
I’m Ecstatic you Stumbled upon the Content Helpful.
If you’re Enthusiastic about Exploring more Avenues in the online Wagering
Landscape, I’d Endorse Trying out CMD368.
They Present a Vast assortment of Enthralling Gambling Possibilities, Immersive coverage, and a Hassle-free Website.
What I Really Admire about CMD368 is their Attention to Ethical Wagering.
They have Robust Precautions and Features to Assist Gamblers Manage their actions.
Regardless of whether you’re a Seasoned Sports fan or Unaccustomed to the Sports, I Imagine
you’d Genuinely Delight in the Venture.
Feel free to Register Using the URL and Get in touch if
you have Additional Curiosities.
Here is my web site; online sports betting
https://nexoitsolution.com/2024/09/18/snjat-kvartiru-v-grodno-na-sutki-arenda-kvartir-26-2/
can you buy generic tinidazole online
How To Obtain Free Traffic From Bookmarking Sites? 링크모음 [https://my.desktopnexus.com]
Задумались, где выгоднее всего оформить кредит? На dengibyn вы сможете узнать все варианты и детали.
https://sulhaj.com/kvartira-na-sutki-v-minske-nedorogo-ceny-snjat-16-2/
buying tinidazole without prescription
I am regular reader, how are you everybody? This post posted at this website is in fact nice.
casino kometa бездепозитный
Казино Kometa: Лучший вариант для фанатов игр на удачу
Когда вы являетесь интересуетесь азартными играми и рассматриваете сайт, что дает доступ к огромный ассортимент игровых автоматов и лайв-игр, а плюс выгодные предложения, Kometa Casino — это та площадка, в котором вас ждут яркие эмоции. Давайте узнаем, что превращает это казино таким особенным и по каким причинам игроки остановились на этом сайте для своих развлечений.
### Основные характеристики Kometa Casino
Kometa Casino — это всемирная игровая платформа, которая была основана в 2024 году и уже сейчас получила внимание пользователей по всему миру. Вот ключевые черты, которые сравнивают с другими данную платформу:
Функция Описание
Год создания 2024
География Доступа Всемирная
Объем игр Более 1000
Сертификация Лицензия Кюрасао
Мобильный доступ Да
Способы Оплаты Visa, Mastercard, Skrill
Поддержка 24 часа в сутки
Бонусы и Акции Акции и бонусы
Система безопасности SSL Шифрование
### Что привлекает в Казино Kometa?
#### Бонусная система
Одним из интересных особенностей Казино Kometa является уникальная программа лояльности. Чем больше ставок, тем больше ваши вознаграждения. Система имеет 7 этапов:
— **Уровень 1 — Земля**: Кэшбек 3% 3% от затрат за 7 дней.
— **Уровень 2 — Луна**: Возврат 5% на ставки от 5 000 до 10 000 RUB.
— **Венера (уровень 3)**: Возврат 7% при ставках от 10 001 до 50 000 ?.
— **Уровень 4 — Марс**: Возврат 8% при ставках от 50 001 до 150 000 рублей.
— **Юпитер (уровень 5)**: 10% возврата при ставках свыше 150 000 RUB.
— **Уровень 6 — Сатурн**: 11% бонуса.
— **Уран (уровень 7)**: Максимальный кэшбек до 12%.
#### Постоянные бонусы
Чтобы держать игровой активности, Казино Kometa проводит бонусы каждую неделю, возврат средств и фриспины для новичков. Частые бонусы способствуют удерживать внимание на протяжении всей игры.
#### Огромный каталог игр
Более 1000 игр, включая игровые машины, настольные развлечения и живое казино, превращают Казино Kometa местом, где каждый найдет игру по душе. Каждый может играть стандартными автоматами, так и новейшими играми от ведущих провайдеров. Живые дилеры создают игровому процессу ощущение реального казино, создавая атмосферу настоящего казино.
Понадобились средства оперативно? Оформите займ на карту и получите деньги в кратчайшие сроки.
how can i get cheap precose tablets
https://elecciones2023.cu/kvartiry-na-sutki-v-minske-svobodnye-segodnja-21/
Нужен быстрый способ получить займ на карту? Мы поможем удобные и выгодные предложения.
where to buy prednisone 5mg
https://isei.edu.mx/kvartiry-posutochno-v-grodno-snjat-kvartiru-na-4-2/
Профессиональный сервисный центр по ремонту игровых консолей Sony Playstation, Xbox, PSP Vita с выездом на дом по Москве.
Мы предлагаем: профессиональный ремонт игровых консолей
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Алкошоп и Alcoshop — это идеальный выбор для тех, кто хочет заказать алкоголь в Москве. Доставка работает круглосуточно, что позволяет получить нужные напитки в любое время. Позвонив по номеру +74993433939, вы получите нужный товар максимально оперативно.
Круглосуточная доставка через Алкошоп позволяет без труда заказать алкоголь на дом. Вы можете обратиться в Alcoshop для заказа через интернет, что делает процесс максимально удобным. Сервис гарантирует оперативное получение заказа.
Для заказа алкоголя в Москве круглосуточно на дом достаточно связаться с Алкошоп. В Alcoshop доступен большой выбор алкоголя, что удовлетворит любые предпочтения. Доставка осуществляется с заботой о качестве и безопасности, делая каждый заказ без лишних ожиданий.
how to get imuran no prescription
https://martindalecenter.com/snjat-kvartiru-na-sutki-v-minske-posutochnaja-35/
Профессиональный сервисный центр по ремонту игровых консолей Sony Playstation, Xbox, PSP Vita с выездом на дом по Москве.
Мы предлагаем: ремонт игровых консолей с гарантией
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Howdy, i read your blog from time to time and i own a similar one and i was just wondering if you get a lot of spam responses? If so how do you prevent it, any plugin or anything you can suggest? I get so much lately it’s driving me crazy so any assistance is very much appreciated.
buying cheap glycomet for sale
can i buy cheap celebrex without a prescription
(*^.^*)
https://mari-tyrek.ru/67378.html
It’s appropriate time to make some plans for the future and it is
time to be happy. I have read this post and if I may just I want to recommend you some fascinating issues or suggestions.
Maybe you can write subsequent articles regarding this article.
I wish to learn even more things approximately it!
my webpage — The Billionaire Brain Wave
advair diskus 100 50 price
can i get generic celebrex
can you buy cheap mobic price
how can i get generic luvox without insurance
Нуждаетесь в быстрых и надёжных займах? Тогда вам стоит посетить https://dengibyn.ru для выгодных условий.
can i get cheap prasugrel pills
เกมสล็อตออนไลน์
สล็อต888 เป็นหนึ่งในแพลตฟอร์มเกมสล็อตออนไลน์ที่ได้รับความนิยมสูงสุดในปัจจุบัน โดยมีความโดดเด่นด้วยการให้บริการเกมสล็อตที่หลากหลายและมีคุณภาพ รวมถึงฟีเจอร์ที่ช่วยให้ผู้เล่นสามารถเพลิดเพลินกับการเล่นได้อย่างเต็มที่ ในบทความนี้ เราจะมาพูดถึงฟีเจอร์และจุดเด่นของสล็อต888 ที่ทำให้เว็บไซต์นี้ได้รับความนิยมเป็นอย่างมาก
ฟีเจอร์เด่นของ PG สล็อต888
ระบบฝากถอนเงินอัตโนมัติที่รวดเร็ว สล็อต888 ให้บริการระบบฝากถอนเงินแบบอัตโนมัติที่สามารถทำรายการได้ทันที ไม่ต้องรอนาน ไม่ว่าจะเป็นการฝากหรือถอนก็สามารถทำได้ภายในไม่กี่วินาที รองรับการใช้งานผ่านทรูวอลเล็ทและช่องทางอื่น ๆ โดยไม่มีขั้นต่ำในการฝากถอน
รองรับทุกอุปกรณ์ ทุกแพลตฟอร์ม ไม่ว่าคุณจะเล่นจากอุปกรณ์ใดก็ตาม สล็อต888 รองรับทั้งคอมพิวเตอร์ แท็บเล็ต และสมาร์ทโฟน ไม่ว่าจะเป็นระบบ iOS หรือ Android คุณสามารถเข้าถึงเกมสล็อตได้ทุกที่ทุกเวลาเพียงแค่มีอินเทอร์เน็ต
โปรโมชั่นและโบนัสมากมาย สำหรับผู้เล่นใหม่และลูกค้าประจำ สล็อต888 มีโปรโมชั่นต้อนรับ รวมถึงโบนัสพิเศษ เช่น ฟรีสปินและโบนัสเครดิตเพิ่ม ทำให้การเล่นเกมสล็อตกับเราเป็นเรื่องสนุกและมีโอกาสทำกำไรมากยิ่งขึ้น
ความปลอดภัยสูงสุด เรื่องความปลอดภัยเป็นสิ่งที่สล็อต888 ให้ความสำคัญเป็นอย่างยิ่ง เราใช้เทคโนโลยีการเข้ารหัสข้อมูลขั้นสูงเพื่อปกป้องข้อมูลส่วนบุคคลของลูกค้า ระบบฝากถอนเงินยังมีมาตรการรักษาความปลอดภัยที่เข้มงวด ทำให้ลูกค้ามั่นใจในการใช้บริการกับเรา
ทดลองเล่นสล็อตฟรี
สล็อต888 ยังมีบริการให้ผู้เล่นสามารถทดลองเล่นสล็อตได้ฟรี ซึ่งเป็นโอกาสที่ดีในการทดลองเล่นเกมต่าง ๆ ที่มีอยู่บนเว็บไซต์ เช่น Phoenix Rises, Dream Of Macau, Ways Of Qilin, Caishens Wins และเกมยอดนิยมอื่น ๆ ที่มีกราฟิกสวยงามและรูปแบบการเล่นที่น่าสนใจ
ไม่ว่าจะเป็นเกมแนวผจญภัย เช่น Rise Of Apollo, Dragon Hatch หรือเกมที่มีธีมแห่งความมั่งคั่งอย่าง Crypto Gold, Fortune Tiger, Lucky Piggy ทุกเกมได้รับการออกแบบมาเพื่อสร้างประสบการณ์การเล่นที่น่าจดจำและเต็มไปด้วยความสนุกสนาน
บทสรุป
สล็อต888 เป็นแพลตฟอร์มที่ครบเครื่องเรื่องเกมสล็อตออนไลน์ ด้วยฟีเจอร์ที่ทันสมัย โปรโมชั่นที่น่าสนใจ และระบบรักษาความปลอดภัยที่เข้มงวด ทำให้คุณมั่นใจได้ว่าการเล่นกับสล็อต888 จะเป็นประสบการณ์ที่ปลอดภัยและเต็มไปด้วยความสนุก
how to get tegretol price
I love it when folks get together and share thoughts. Great website, keep it up!
where to buy generic inderal without insurance
buy glycomet without insurance
Необходимы средства оперативно? Оформите займ на карту и переведите деньги всего за несколько минут.
albuterol for sale canada
how to get tegretol no prescription
Нуждаетесь в быстрых и выгодных займах? Тогда вам стоит посетить limazaim для выгодных условий.
< — :-o)
https://mari-tyrek.ru/3529.html
where to get tizanidine pill
Алкопланет и alcoplanet предлагают удобную и быструю доставку алкоголя. Позвонив по номеру +74993850909, вы сможете оформить заказ в любое время суток. Доставка доступна по всей Москве, что делает сервис удобным и доступным для всех.
Если вам нужна доставка алкоголя ночью, Алкопланет — это идеальный выбор. Связавшись по +74993850909, вы сможете заказать алкоголь на дом без задержек. Благодаря alcoplanet, вы можете наслаждаться качественным сервисом.
Алкопланет предлагает разнообразие алкогольных напитков с доставкой. С помощью +74993850909 можно быстро оформить заказ и получить его прямо к двери. Услуга alcoplanet гарантирует комфорт и удобство клиентов, что делает процесс максимально быстрым и простым.
Wow, awesome blog structure! How long have you been blogging for? you make blogging look easy. The whole look of your site is great, as smartly as the content material!
Drugs information leaflet. What side effects can this medication cause?
where to buy cheap requip price
Actual about medicine. Read now.
https://ekconcept.com/snjat-1-komnatnuju-kvartiru-na-sutki-grodno-7
where can i buy duphalac without insurance
http://rubymsltd.co.uk/kvartiry-posutochno-v-gomele-snjat-kvartiru-na-23/
paxlovid for sale: check this — paxlovid pharmacy
สล็อต888
สล็อต888 เป็นหนึ่งในแพลตฟอร์มเกมสล็อตออนไลน์ที่ได้รับความนิยมสูงสุดในปัจจุบัน โดยมีความโดดเด่นด้วยการให้บริการเกมสล็อตที่หลากหลายและมีคุณภาพ รวมถึงฟีเจอร์ที่ช่วยให้ผู้เล่นสามารถเพลิดเพลินกับการเล่นได้อย่างเต็มที่ ในบทความนี้ เราจะมาพูดถึงฟีเจอร์และจุดเด่นของสล็อต888 ที่ทำให้เว็บไซต์นี้ได้รับความนิยมเป็นอย่างมาก
ฟีเจอร์เด่นของ PG สล็อต888
ระบบฝากถอนเงินอัตโนมัติที่รวดเร็ว สล็อต888 ให้บริการระบบฝากถอนเงินแบบอัตโนมัติที่สามารถทำรายการได้ทันที ไม่ต้องรอนาน ไม่ว่าจะเป็นการฝากหรือถอนก็สามารถทำได้ภายในไม่กี่วินาที รองรับการใช้งานผ่านทรูวอลเล็ทและช่องทางอื่น ๆ โดยไม่มีขั้นต่ำในการฝากถอน
รองรับทุกอุปกรณ์ ทุกแพลตฟอร์ม ไม่ว่าคุณจะเล่นจากอุปกรณ์ใดก็ตาม สล็อต888 รองรับทั้งคอมพิวเตอร์ แท็บเล็ต และสมาร์ทโฟน ไม่ว่าจะเป็นระบบ iOS หรือ Android คุณสามารถเข้าถึงเกมสล็อตได้ทุกที่ทุกเวลาเพียงแค่มีอินเทอร์เน็ต
โปรโมชั่นและโบนัสมากมาย สำหรับผู้เล่นใหม่และลูกค้าประจำ สล็อต888 มีโปรโมชั่นต้อนรับ รวมถึงโบนัสพิเศษ เช่น ฟรีสปินและโบนัสเครดิตเพิ่ม ทำให้การเล่นเกมสล็อตกับเราเป็นเรื่องสนุกและมีโอกาสทำกำไรมากยิ่งขึ้น
ความปลอดภัยสูงสุด เรื่องความปลอดภัยเป็นสิ่งที่สล็อต888 ให้ความสำคัญเป็นอย่างยิ่ง เราใช้เทคโนโลยีการเข้ารหัสข้อมูลขั้นสูงเพื่อปกป้องข้อมูลส่วนบุคคลของลูกค้า ระบบฝากถอนเงินยังมีมาตรการรักษาความปลอดภัยที่เข้มงวด ทำให้ลูกค้ามั่นใจในการใช้บริการกับเรา
ทดลองเล่นสล็อตฟรี
สล็อต888 ยังมีบริการให้ผู้เล่นสามารถทดลองเล่นสล็อตได้ฟรี ซึ่งเป็นโอกาสที่ดีในการทดลองเล่นเกมต่าง ๆ ที่มีอยู่บนเว็บไซต์ เช่น Phoenix Rises, Dream Of Macau, Ways Of Qilin, Caishens Wins และเกมยอดนิยมอื่น ๆ ที่มีกราฟิกสวยงามและรูปแบบการเล่นที่น่าสนใจ
ไม่ว่าจะเป็นเกมแนวผจญภัย เช่น Rise Of Apollo, Dragon Hatch หรือเกมที่มีธีมแห่งความมั่งคั่งอย่าง Crypto Gold, Fortune Tiger, Lucky Piggy ทุกเกมได้รับการออกแบบมาเพื่อสร้างประสบการณ์การเล่นที่น่าจดจำและเต็มไปด้วยความสนุกสนาน
บทสรุป
สล็อต888 เป็นแพลตฟอร์มที่ครบเครื่องเรื่องเกมสล็อตออนไลน์ ด้วยฟีเจอร์ที่ทันสมัย โปรโมชั่นที่น่าสนใจ และระบบรักษาความปลอดภัยที่เข้มงวด ทำให้คุณมั่นใจได้ว่าการเล่นกับสล็อต888 จะเป็นประสบการณ์ที่ปลอดภัยและเต็มไปด้วยความสนุก
http://sushivietthai.de/uznali-skolko-stoit-snjat-kvartiru-nasutki-vminske-4/
can i buy benemid without dr prescription
国产线播放免费人成视频播放
how can i get pregabalin no prescription
https://nibandco.com/snjat-kvartiru-v-gomele-na-sutki-arenda-kvartir-43-2/
Do you mind if I quote a couple of your posts as long as I provide credit and sources back to your website? My blog site is in the exact same niche as yours and my visitors would truly benefit from a lot of the information you present here. Please let me know if this alright with you. Appreciate it!
cost of cheap allegra without insurance
смотреть порно
https://kukoajovenes.org/snjat-kvartiru-na-sutki-v-gomele-nedorogo-23/
can you buy generic cetirizine without insurance
порно студентки
https://p3mediafrica.com/snjat-dvuhkomnatnuju-kvartiru-na-sutki-v-grodno-4/
Bạn đang tìm kiếm những trò chơi hot nhất và thú vị nhất tại sòng bạc trực tuyến? RGBET tự hào giới thiệu đến bạn nhiều trò chơi cá cược đặc sắc, bao gồm Baccarat trực tiếp, máy xèng, cá cược thể thao, xổ số và bắn cá, mang đến cho bạn cảm giác hồi hộp đỉnh cao của sòng bạc! Dù bạn yêu thích các trò chơi bài kinh điển hay những máy xèng đầy kịch tính, RGBET đều có thể đáp ứng mọi nhu cầu giải trí của bạn.
RGBET Trò Chơi của Chúng Tôi
Bạn đang tìm kiếm những trò chơi hot nhất và thú vị nhất tại sòng bạc trực tuyến? RGBET tự hào giới thiệu đến bạn nhiều trò chơi cá cược đặc sắc, bao gồm Baccarat trực tiếp, máy xèng, cá cược thể thao, xổ số và bắn cá, mang đến cảm giác hồi hộp đỉnh cao của sòng bạc! Dù bạn yêu thích các trò chơi bài kinh điển hay những máy xèng đầy kịch tính, RGBET đều có thể đáp ứng mọi nhu cầu giải trí của bạn.
RGBET Trò Chơi Đa Dạng
Thể thao: Cá cược thể thao đa dạng với nhiều môn từ bóng đá, tennis đến thể thao điện tử.
Live Casino: Trải nghiệm Baccarat, Roulette, và các trò chơi sòng bài trực tiếp với người chia bài thật.
Nổ hũ: Tham gia các trò chơi nổ hũ với tỷ lệ trúng cao và cơ hội thắng lớn.
Lô đề: Đặt cược lô đề với tỉ lệ cược hấp dẫn.
Bắn cá: Bắn cá RGBET mang đến cảm giác chân thực và hấp dẫn với đồ họa tuyệt đẹp.
RGBET — Máy Xèng Hấp Dẫn Nhất
Khám phá các máy xèng độc đáo tại RGBET với nhiều chủ đề khác nhau và tỷ lệ trả thưởng cao. Những trò chơi nổi bật bao gồm:
RGBET Super Ace
RGBET Đế Quốc Hoàng Kim
RGBET Pharaoh Treasure
RGBET Quyền Vương
RGBET Chuyên Gia Săn Rồng
RGBET Jackpot Fishing
Vì sao nên chọn RGBET?
RGBET không chỉ cung cấp hàng loạt trò chơi đa dạng mà còn mang đến một hệ thống cá cược an toàn và chuyên nghiệp, đảm bảo mọi quyền lợi của người chơi:
Tốc độ nạp tiền nhanh chóng: Chuyển khoản tại RGBET chỉ mất vài phút và tiền sẽ vào tài khoản ngay lập tức, giúp bạn không bỏ lỡ bất kỳ cơ hội nào.
Game đổi thưởng phong phú: Từ cá cược thể thao đến slot game, RGBET cung cấp đầy đủ trò chơi giúp bạn tận hưởng mọi phút giây thư giãn.
Bảo mật tuyệt đối: Với công nghệ mã hóa tiên tiến, tài khoản và tiền vốn của bạn sẽ luôn được bảo vệ một cách an toàn.
Hỗ trợ đa nền tảng: Bạn có thể chơi trên mọi thiết bị, từ máy tính, điện thoại di động (iOS/Android), đến nền tảng H5.
Tải Ứng Dụng RGBET và Nhận Khuyến Mãi Lớn
Hãy tham gia RGBET ngay hôm nay để tận hưởng thế giới giải trí không giới hạn với các trò chơi thể thao, thể thao điện tử, casino trực tuyến, xổ số, và slot game. Quét mã QR và tải ứng dụng RGBET trên điện thoại để trải nghiệm game tốt hơn và nhận nhiều khuyến mãi hấp dẫn!
Tham gia RGBET để bắt đầu cuộc hành trình cá cược đầy thú vị ngay hôm nay!
Garansi Kekalahan
NAGAEMPIRE: Platform Sports Game dan E-Games Terbaik di Tahun 2024
Selamat datang di Naga Empire, platform hiburan online yang menghadirkan pengalaman gaming terdepan di tahun 2024! Kami bangga menawarkan sports game, permainan kartu, dan berbagai fitur unggulan yang dirancang untuk memberikan Anda kesenangan dan keuntungan maksimal.
Keunggulan Pendaftaran dengan E-Wallet dan QRIS
Kami memprioritaskan kemudahan dan kecepatan dalam pengalaman bermain Anda:
Pendaftaran dengan E-Wallet: Daftarkan akun Anda dengan mudah menggunakan e-wallet favorit. Proses pendaftaran sangat cepat, memungkinkan Anda langsung memulai petualangan gaming tanpa hambatan.
QRIS Auto Proses dalam 1 Detik: Transaksi Anda diproses instan hanya dalam 1 detik dengan teknologi QRIS, memastikan pembayaran dan deposit berjalan lancar tanpa gangguan.
Sports Game dan Permainan Kartu Terbaik di Tahun 2024
Naga Empire menawarkan berbagai pilihan game menarik:
Sports Game Terlengkap: Dari taruhan olahraga hingga fantasy sports, kami menyediakan sensasi taruhan olahraga dengan kualitas terbaik.
Kartu Terbaik di 2024: Nikmati permainan kartu klasik hingga variasi modern dengan grafis yang menakjubkan, memberikan pengalaman bermain yang tak terlupakan.
Permainan Terlengkap dan Toto Terlengkap
Kami memiliki koleksi permainan yang sangat beragam:
Permainan Terlengkap: Temukan berbagai pilihan permainan seperti slot mesin, kasino, hingga permainan berbasis keterampilan, semua tersedia di Naga Empire.
Toto Terlengkap: Layanan Toto Online kami menawarkan pilihan taruhan yang lengkap dengan odds yang kompetitif, memberikan pengalaman taruhan yang optimal.
Bonus Melimpah dan Turnover Terendah
Bonus Melimpah: Dapatkan bonus mulai dari bonus selamat datang, bonus setoran, hingga promosi eksklusif. Kami selalu memberikan nilai lebih pada setiap taruhan Anda.
Turnover Terendah: Dengan turnover rendah, Anda dapat meraih kemenangan lebih mudah dan meningkatkan keuntungan dari setiap permainan.
Naga Empire adalah tempat yang tepat bagi Anda yang mencari pengalaman gaming terbaik di tahun 2024. Bergabunglah sekarang dan rasakan sensasi kemenangan di platform yang paling komprehensif!
where can i get generic prednisone price
порно с сестрой
https://www.barcocaribetour.com/kvartiry-na-sutki-v-gomele-snjat-kvartiru-18/
Задумались, где выгоднее всего взять займ? На limazaim вы откроете для себя все предложения и условия.
get cipro without rx
If you are going for best contents like myself, just pay a quick visit this site every day since it offers quality contents, thanks
https://www.lesvios-oinos.gr/snjat-kvartiru-na-sutki-v-gomele-nedorogaja-arenda-8/
Если незамедлительно нужны средства, вы всегда имеете возможность взять займ в Минске онлайн без бумажной волокиты.
can i order doxycycline tablets
https://www.labassashopping.it/2024/09/18/kvartiry-na-sutki-v-minske-snjat-kvartiru-20-2/
It’s amazing to pay a visit this web site and reading the views of all friends concerning this paragraph, while I am also keen of getting know-how.
Here is my web site prostalite.com
Нужны надежные финансовые услуги? Посетите limazaim.ru и ознакомьтесь с все условия.
cefixime antibiotic for diarrhea
https://subscribe.jingselfcare.com/2024/09/18/snjat-kvartiru-gde-razresheno-prozhivanie-s-24/
Не можете найти, где выгоднее всего взять займ? На https://limazaim.ru вы найдете все предложения и детали.
USDT TRON-based Transaction Check and Financial Crime Prevention (Anti-Money Laundering) Practices
As crypto coins like USDT TRC20 increase in adoption for quick and low-cost payments, the requirement for safety and compliance with AML regulations grows. Here’s how to check Tether TRC20 payments and ensure they’re not related to unlawful activities.
What is USDT TRC20?
USDT TRC20 is a digital currency on the TRON ledger, valued in correspondence with the US dollar. Recognized for its cheap transfers and velocity, it is widely used for cross-border transactions. Checking transactions is essential to avoid links to illicit transfers or other illegal operations.
Checking TRON-based USDT Transfers
TRONSCAN — This blockchain explorer allows individuals to follow and check Tether TRON-based payments using a account ID or transfer code.
Tracking — Experienced users can observe unusual behaviors such as high-volume or rapid transactions to detect suspicious actions.
AML and Illicit Funds
Anti-Money Laundering (AML) rules assist stop illicit money transfers in crypto markets. Services like Chain Analysis and Elliptic enable companies and trading platforms to detect and stop criminal crypto, which refers to money connected to unlawful operations.
Solutions for Adherence
TRONSCAN — To check TRON-based USDT payment data.
Chainalysis and Elliptic Solutions — Utilized by crypto markets to confirm AML conformance and track illicit activities.
Conclusion
Ensuring secure and lawful TRON-based USDT payments is essential. Platforms like TRONSCAN and AML systems support guard users from interacting with criminal crypto, supporting a safe and compliant crypto environment.
good price https://rybelsus.tech/# rybelsus price
cheaper
human design type jovian archive human design
https://leflamboyantnosybe.com/2024/09/23/snjat-vip-kvartiru-na-sutki-v-gomele-arenda-vip-29/
You need to take part in a contest for one of the most useful websites on the web. I most certainly will highly recommend this web site!
dragonmoney
Мембраны DELTA купить
dragonmoney
FIBRA PLANK купить
Где вы покупаете мебель для дома? купить диван
Thanks for sharing your info. I truly appreciate your efforts and I will be waiting for your further write
ups thank you once again.
Also visit my blog http://www.purdentix
https://www.velsonpackagings.com/2024/09/18/snjat-odnokomnatnuju-kvartiru-na-sutki-v-grodno-12/
dragon money официальный сайт
Наша команда специалистов готова оказать вам всю необходимую поддержку и помощь в выборе микрозайма. Мы всегда на связи и готовы ответить на любые вопросы, связанные с процессом кредитования.
займы Казахстан займ онлайн .
Мембраны EUROVENT (Евровент) купить
dragonmoney
up x приложение
Фасадные материалы купить
драгон мани
Ищете надежные финансовые услуги? Посетите https://limazaim.ru и получите все условия.
Симонов Марат Вилович
Соединительные ленты/скотчи DELTA купить
Мы ценим доверие наших клиентов и предлагаем только самые выгодные и безопасные решения на рынке микрозаймов в Казахстане. С нами вы всегда можете быть уверены, что получите необходимую финансовую помощь на лучших условиях.
займы онлайн займ Казахстан .
Hi to every one, because I am really eager of reading this blog’s post to be updated on a regular basis. It carries good material.
драгон мани
Понадобились средства оперативно? Оформите займ на карту и переведите деньги моментально.
Aw, this was a very good post. Finding the time and
actual effort to produce a great article… but
what can I say… I put things off a lot and don’t seem to get anything
done.
Also visit my web blog :: the plantsulin
cost of cheap motilium
Не знаете, на какой сайт обратиться? На limazaim вас ждут справедливые условия и широкий выбор предложений.
Greetings from Florida! I’m bored at work so I decided to check out your blog on my iphone during lunch break.
I really like the info you provide here and can’t wait to take
a look when I get home. I’m surprised at how quick your blog loaded on my
mobile .. I’m not even using WIFI, just 3G .. Anyways, good blog!
My web site :: steel bite pro vs provadent
Возникли непредвиденные расходы? Теперь вы имеете возможность получить деньги в долг в Минске на справедливых условиях всего за короткое время.
fantastic publish, very informative. I wonder why the opposite specialists of this sector don’t realize this. You should proceed your writing. I am sure, you’ve a huge readers’ base already!
Nightclubs Today: Step Beyond The Past And In The Now 울산오피, telegra.ph,
Где вы покупаете мебель для дома? купить диван
С нашими сервисами вы имеете возможность оформить займы онлайн в Минске в любое время, без лишних документов.
乱伦色情
online casino
пин ап зеркало: пин ап вход — пинап зеркало
Профессиональный сервисный центр по ремонту телефонов в Москве.
Мы предлагаем: номер телефона ремонта телефонов
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Профессиональный сервисный центр по ремонту телефонов в Москве.
Мы предлагаем: ремонт телефона
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Если незамедлительно нужны средства, вы всегда способны взять займ в Минске онлайн без долгих ожиданий.
Профессиональный сервисный центр по ремонту телефонов в Москве.
Мы предлагаем: ремонт смартфонов
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Профессиональный сервисный центр по ремонту телефонов в Москве.
Мы предлагаем: где можно починить телефон
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Профессиональный сервисный центр по ремонту телефонов в Москве.
Мы предлагаем: сервисный центр телефонов
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Профессиональный сервисный центр по ремонту телефонов в Москве.
Мы предлагаем: ремонт телефонов рядом
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
Профессиональный сервисный центр по ремонту телефонов в Москве.
Мы предлагаем: ремонт телефонов по близости
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
เล่นบาคาร่าแบบรวดเร็วทันใจกับสปีดบาคาร่า
ถ้าคุณเป็นแฟนตัวยงของเกมไพ่บาคาร่า คุณอาจจะเคยชินกับการรอคอยในแต่ละรอบการเดิมพัน และรอจนดีลเลอร์แจกไพ่ในแต่ละตา แต่คุณรู้หรือไม่ว่า ตอนนี้คุณไม่ต้องรออีกต่อไปแล้ว เพราะ SA Gaming ได้พัฒนาเกมบาคาร่าโหมดใหม่ขึ้นมา เพื่อให้ประสบการณ์การเล่นของคุณน่าตื่นเต้นยิ่งขึ้น!
ที่ SA Gaming คุณสามารถเลือกเล่นไพ่บาคาร่าในโหมดที่เรียกว่า สปีดบาคาร่า (Speed Baccarat) โหมดนี้มีคุณสมบัติพิเศษและข้อดีที่น่าสนใจมากมาย:
ระยะเวลาการเดิมพันสั้นลง — คุณไม่จำเป็นต้องรอนานอีกต่อไป ในโหมดสปีดบาคาร่า คุณจะมีเวลาเพียง 12 วินาทีในการวางเดิมพัน ทำให้เกมแต่ละรอบจบได้รวดเร็ว โดยเกมในแต่ละรอบจะใช้เวลาเพียง 20 วินาทีเท่านั้น
ผลตอบแทนต่อผู้เล่นสูง (RTP) — เกมสปีดบาคาร่าให้ผลตอบแทนต่อผู้เล่นสูงถึง 4% ซึ่งเป็นมาตรฐานความเป็นธรรมที่ผู้เล่นสามารถไว้วางใจได้
การเล่นเกมที่รวดเร็วและน่าตื่นเต้น — ระยะเวลาที่สั้นลงทำให้เกมแต่ละรอบดำเนินไปอย่างรวดเร็ว ทันใจ เพิ่มความสนุกและความตื่นเต้นในการเล่น ทำให้ประสบการณ์การเล่นของคุณยิ่งสนุกมากขึ้น
กลไกและรูปแบบการเล่นยังคงเหมือนเดิม — แม้ว่าระยะเวลาจะสั้นลง แต่กลไกและกฎของการเล่น ยังคงเหมือนกับบาคาร่าสดปกติทุกประการ เพียงแค่ปรับเวลาให้เล่นได้รวดเร็วและสะดวกขึ้นเท่านั้น
นอกจากสปีดบาคาร่าแล้ว ที่ SA Gaming ยังมีโหมด No Commission Baccarat หรือบาคาร่าแบบไม่เสียค่าคอมมิชชั่น ซึ่งจะช่วยให้คุณสามารถเพลิดเพลินไปกับการเล่นได้โดยไม่ต้องกังวลเรื่องค่าคอมมิชชั่นเพิ่มเติม
เล่นบาคาร่ากับ SA Gaming คุณจะได้รับประสบการณ์การเล่นที่สนุก ทันสมัย และตรงใจมากที่สุด!
драгон мани казино
how can i get generic celebrex without prescription
Drugs information. Short-Term Effects.
where to get tolterodine for sale
Best what you want to know about drug. Read information now.
пинап зеркало: пин ап зеркало — пин ап зеркало
http://1winbrasil.win/# pin up 306
пин ап казино вход
Мы ценим доверие наших клиентов и предлагаем только самые выгодные и безопасные решения на рынке микрозаймов в Казахстане. С нами вы всегда можете быть уверены, что получите необходимую финансовую помощь на лучших условиях.
займы Казахстан займ онлайн .
As the admin of this web site is working, no uncertainty very shortly it will be famous, due to its quality contents.
I unearthed your blog post to be a thought-provoking
and perceptive examination of the emerging state of
the sector . Your evaluation of the critical changes and hurdles
confronting businesses in this sector was strikingly impactful.
As an avid adherent of this topic , I would be excited to explore this
debate further . If you are enthusiastic , I would graciously implore you to uncover the exciting
prospects offered at WM CASINO. Our system offers a sophisticated and guarded realm for collaborating with like-minded devotees
and obtaining a cornucopia of knowledge to bolster
your insight of this ever-changing sector.
I eagerly await the potential of working together with you
in the near time
Look at my blog post — free credit casino (fileforum.com)
I love your blog.. very nice colors & theme. Did you make this website
yourself or did you hire someone to do it for you? Plz reply as I’m looking to construct my own blog and would
like to know where u got this from. kudos
1xbet зеркало: 1xbet зеркало — 1xbet
С нами вы имеете возможность оформить займы онлайн в Минске круглосуточно, без лишних документов.
dragon money
Наша команда специалистов готова оказать вам всю необходимую поддержку и помощь в выборе микрозайма. Мы всегда на связи и готовы ответить на любые вопросы, связанные с процессом кредитования.
микрозайм займы онлайн Казахстан .
Drug information leaflet. What side effects can this medication cause?
how to get cheap cialis soft for sale
Everything what you want to know about drug. Get information now.
can you buy cheap maxalt prices
Drugs information leaflet. What side effects can this medication cause?
where to buy generic ziprasidone prices
Best news about drugs. Read now.
Игровой автомат Candy Blitz предлагает увлекательный
игровой процесс, великолепную графику и воз возможностей
для выигрыша. Не упустите шанс почувствовать свою удачу и упиться сладкими призами уже нынче!
Вы можете повидать удачу в Candy Blitz абсолютно задарма!
Просто выберите демо-режим и наслаждайтесь игрой без
риска потери средств. Желаете попробовать удачу
и упиться сладкими выигрышами? Тогда начните перекидываться
в Candy Blitz уже сегодня! Этот захватывающий слот ждет
вас с открытыми объятиями.
Играйте в Candy Blitz demo в рублях задарма Игровой автомат Candy
Blitz предлагает увлекательный игровой процесс, великолепную графику и воз возможностей для
выигрыша. Не упустите шанс узнать
свою удачу и усладиться сладкими призами уже ныне!
generic indocin pills
Medication information sheet. Drug Class.
how can i get generic warfarin pills
All what you want to know about pills. Read here.
My brother suggested I may like this blog. He was once entirely right. This submit actually made my day. You cann’t consider simply how a lot time I had spent for this info! Thank you!
I discovered your blog post to be a compelling and
sagacious examination of the current state of the domain .
Your scrutiny of the principal changes and
issues dealing with businesses in this area was strikingly compelling
.
As an ardent adherent of this topic , I would be thrilled to continue this discussion more comprehensively .
If you are desirous , I would warmly invite you to embark on the captivating alternatives available at WM CASINO.
Our framework presents a state-of-the-art and fortified domain for sharing knowledge with
kindred spirit enthusiasts and accessing a myriad of insights to hone your comprehension of this fluctuating industry
. I eagerly await the possibility of teaming
up with you in the impending time
Also visit my blog … click here
пин ап: пин ап — пин ап казино
can i order celebrex pills
Medicines information. Drug Class.
how can i get azathioprine for sale
Everything news about meds. Get information here.
С предложенными услугами вы имеете возможность оформить займы онлайн в Минске в любое время, без выхода из дома.
Тема «Четыре типа в Дизайне Человека» важна для понимания не только на теоретическом, но и на практическом уровне. Этот инструмент самопознания помогает каждому из нас осознать свою природу и использовать индивидуальные особенности для улучшения качества жизни. Рассмотрим рационально-практическую сторону каждого из типов, их определения и различия.
Первый тип в Дизайне Человека – это Генератор. Он отличаются высокой энергетичностью и способностью легко и эффективно завершать начатые задачи. Этот тип создан для работы, и его главное стремление — заниматься тем, что приносит удовольствие. Генератор начинает действовать, когда ощущает внутренний отклик. Основное отличие Генераторов в том, что они заряжают себя и других энергией, если действуют в соответствии с внутренним откликом.
Следующий тип, на который стоит обратить внимание, — Манифестор. Главное предназначение Манифестора — инициировать, начинать и вести за собой. Они не нуждаются в отклике, как Генераторы, и могут сразу принимать решения и действовать. Индивидуальная особенность Манифестора — это стремление к свободе и независимости. Их рациональная роль — прокладывать путь для других.
Не менее значимая категория — Проектор. Проекторы – это люди, которые видят потенциал в других и помогают его раскрыть. Они нуждаются в приглашении, прежде чем начать действовать, и могут эффективно использовать энергию, когда работают с другими людьми. Проекторы отличаются тем, что не обладают собственной энергией, но могут эффективно направлять энергию других. Их рациональное предназначение – это оптимизация работы других типов.
Четвертый тип в Дизайне Человека — это Рефлектор. Этот тип является самым редким и уникальным. Индивидуальная особенность Рефлектора заключается в том, что они полностью зависят от окружающего мира и людей. Их рациональная роль заключается в объективной оценке происходящего вокруг.
В итоге можно сказать следующее: Каждый из четырех типов в Дизайне Человека имеет свои индивидуальные особенности, которые помогают им максимально эффективно взаимодействовать с миром. Понимание своего типа и его практического предназначения позволяет лучше организовать жизнь, выбрать правильные направления для работы и улучшить качество личных отношений.
источник
пин ап зеркало: пин ап зеркало — пин ап
cost of proscar pill
Medicine information for patients. Drug Class.
compazine rx
Actual news about medicine. Get now.
Сомневаетесь, где? На limazaim вас ждут справедливые условия и широкий выбор предложений.
Какие основные отличия между Raspberry Pi, Banana Pi и Orange Pi? Какой из них имеет лучшую производительность и функциональность для различных проектов? Какие плюсы и минусы каждой модели следует учитывать при выборе для конкретной задачи?»,
«refusal купить мебель в екатеринбурге
С нами вы можете оформить займы онлайн в Минске когда угодно, без лишних документов.
Hey would you mind letting me know which webhost you’re working with? I’ve loaded your blog in 3 completely different internet browsers and I must say this blog loads a lot quicker then most. Can you recommend a good hosting provider at a reasonable price? Cheers, I appreciate it!
can i purchase imdur tablets
Алкоклуб и Alcoclub предлагают быструю и круглосуточную доставку алкоголя. Позвоните по номеру +74951086757, чтобы оформить доставку напитков на дом в любое время суток. Этот сервис обеспечивает оперативную доставку по городу, делая процесс максимально комфортным.
Если вам требуется круглосуточный заказ, Алкоклуб — ваш надежный выбор. Связавшись с Alcoclub по номеру +74951086757, вы сможете оформить доставку в любое удобное для вас время. Сервис предлагает разнообразие алкогольной продукции, что гарантирует качество и удобство клиентов.
С Алкоклуб вы всегда можете рассчитывать на оперативную доставку. Оформите заказ через +74951086757, чтобы заказать алкоголь на дом в Москве. Платформа Alcoclub обеспечивает высокий уровень сервиса, чтобы каждый клиент мог наслаждаться удобством заказа.
Тема «Четыре типа в Дизайне Человека» важна для понимания не только на теоретическом, но и на практическом уровне. Этот инструмент самопознания помогает каждому из нас осознать свою природу и использовать индивидуальные особенности для улучшения качества жизни. Рассмотрим рационально-практическую сторону каждого из типов, их определения и различия.
Ключевым типом в этой системе является Генератор. Генераторы отличаются высокой энергетичностью и способностью легко и эффективно завершать начатые задачи. Их природа требует постоянной активности, поэтому важно находить дело, которое по-настоящему нравится. Генератор начинает действовать, когда ощущает внутренний отклик. Основное отличие Генераторов в том, что они заряжают себя и других энергией, если действуют в соответствии с внутренним откликом.
Еще один важный тип в Дизайне Человека — Манифестор. Этот тип уникален своей независимостью и способностью инициировать действия. Они не нуждаются в отклике, как Генераторы, и могут сразу принимать решения и действовать. Манифесторы не подчиняются внешним обстоятельствам, а сами создают свою реальность. Их рациональная роль — прокладывать путь для других.
Также важный элемент системы Дизайна Человека — Проектор. Проекторы – это люди, которые видят потенциал в других и помогают его раскрыть. Они нуждаются в приглашении, прежде чем начать действовать, и могут эффективно использовать энергию, когда работают с другими людьми. Индивидуальная особенность Проектора заключается в умении работать с чужой энергией и направлять ее. Проекторы наиболее эффективны, когда действуют в роли консультантов.
Четвертый тип в Дизайне Человека — это Рефлектор. Этот тип является самым редким и уникальным. Индивидуальная особенность Рефлектора заключается в том, что они полностью зависят от окружающего мира и людей. Рефлекторы могут стать прекрасными аналитиками, так как они замечают мельчайшие изменения.
Итак, подведем итог: Каждый из четырех типов в Дизайне Человека имеет свои индивидуальные особенности, которые помогают им максимально эффективно взаимодействовать с миром. Понимание своего типа и его практического предназначения позволяет лучше организовать жизнь, выбрать правильные направления для работы и улучшить качество личных отношений.
источник
cazino: casino siteleri — casino oyunlar?
Populer slotlar Sahabet casino’da buyuk oduller icin haz?r
Sahabet Casino Sahabet .
гама казино онлайн
get celebrex for sale
Pills information. Long-Term Effects.
how to get generic dilantin prices
Everything information about medicines. Get now.
pin up 306: pin up 306 — pin up casino
pin-up: pin up casino — pin up
gama-casino-zona.ru
how to buy advair diskus price
Anti Money Laundering
Stablecoin TRC20 Payment Check and AML (Anti-Money Laundering) Practices
As cryptocurrencies like Tether TRC20 increase in adoption for fast and low-cost payments, the demand for security and adherence with AML regulations increases. Here’s how to check USDT TRC20 transactions and ensure they’re not connected to unlawful activities.
What is USDT TRC20?
TRON-based USDT is a digital currency on the TRX blockchain, pegged in accordance with the American dollar. Famous for its cheap transfers and speed, it is widely used for cross-border payments. Checking transactions is crucial to block connections to money laundering or other unlawful activities.
Monitoring USDT TRC20 Transactions
TRX Explorer — This blockchain viewer permits users to track and check Tether TRON-based transfers using a public address or transaction ID.
Monitoring — Advanced players can track unusual patterns such as large or quick payments to detect irregular behavior.
AML and Criminal Crypto
Anti-Money Laundering (AML) standards assist stop illicit money transfers in crypto markets. Tools like Chain Analysis and Elliptic enable companies and crypto markets to find and prevent criminal crypto, which signifies money connected to criminal actions.
Instruments for Regulation
TRX Explorer — To verify USDT TRC20 transaction data.
Chain Analysis and Elliptic Solutions — Used by trading platforms to guarantee Anti-Money Laundering compliance and monitor illegal actions.
Summary
Guaranteeing protected and legal USDT TRC20 transfers is critical. Services like TRX Explorer and AML solutions support protect traders from interacting with illicit funds, promoting a protected and compliant cryptocurrency space.
Начало игры на новой площадке всегда интереснее с дополнительными преимуществами. Выгодный приветственный бонус БК помогает новичкам быстрее освоиться и начать делать успешные ставки. Большинство легальных операторов предлагают несколько вариантов стартовых поощрений.
Excellent blog here! Also your site loads up fast! What web host are you using?
Can I get your affiliate link to your host? I wish my website loaded up as fast as yours
lol
my homepage: what is pronerve 6
order generic doxycycline prices
Attractive component of content. I just stumbled upon your blog and in accession capital to assert that I acquire in fact loved account your blog posts. Anyway I’ll be subscribing on your feeds or even I fulfillment you access consistently quickly.
can you buy generic cipro prices
пин ап зеркало: пин ап — пин ап официальный сайт
how can i get cheap aristocort online
пинап кз: пинап казино — pin up
pin up azerbaycan: pinup az — pin-up casino giris
В мире спортивных ставок особой популярностью пользуются бесплатные пари. Проверенные БК с фрибетом позволяют получить дополнительные возможности для выигрыша. Внимательно изучайте условия использования бесплатных ставок для максимальной выгоды.
buy cheap prednisone without dr prescription
http://1winrussia.online/# 1xbet зеркало
пинап казино
В мире спортивных ставок особой популярностью пользуются бесплатные пари. Проверенные БК с фрибетом позволяют получить дополнительные возможности для выигрыша. Внимательно изучайте условия использования бесплатных ставок для максимальной выгоды.
order generic advair diskus without a prescription
I do not even know how I ended up here, but I thought this post was great. I don’t know who you are but definitely you are going to a famous blogger if you are not already 😉 Cheers!
пин ап вход: пинап зеркало — пин ап зеркало
how to buy zithromax tablets
казино daddy официальный сайт
Букмекерские конторы постоянно конкурируют за внимание игроков. Привлекательные новые бонусы БК становятся важным инструментом в борьбе за клиентов на беттинг-рынке. Каждая акция имеет свои уникальные условия и преимущества для беттеров.
1xbet официальный сайт: 1xbet официальный сайт — 1xbet зеркало
Medicine information for patients. Short-Term Effects.
cheap zithromax pill
Everything what you want to know about pills. Get now.
order cheap cialis soft tabs for sale
pin up azerbaycan: pin up casino — pin up azerbaycan
Некоторые операторы ставок предлагают начать игру без пополнения счета. Надежные БК с бездепом дают возможность оценить качество сервиса без финансовых вложений. Бездепозитные бонусы особенно привлекательны для начинающих беттеров, которые только знакомятся с миром ставок.
Drugs prescribing information. Generic Name.
can i get tolterodine no prescription
Actual trends of medication. Get here.
generic reglan without rx
Medicines information leaflet. Effects of Drug Abuse.
where can i get cheap macrobid without a prescription
Actual about medicament. Get information now.
You’ve made some decent points there. I checked on the web for more information about the issue and found most individuals will go along with your views on this site.
can you get inderal price
Medicine information for patients. Cautions.
can you get cheap imitrex no prescription
Everything what you want to know about medicines. Get information now.
buy lisinopril no prescription
can you buy generic zyloprim tablets
Practise Free Online Roulette And Learn The Techniques Involved Within Game 에볼루션 영상 송출; http://www.hulkshare.com,
where can i buy cipro for sale
Medicine information. Short-Term Effects.
where can i buy generic benicar pills
Some information about medicine. Read now.
where to buy generic zyloprim pills
1xbet официальный сайт: 1xbet скачать — 1xbet официальный сайт
how to buy generic avodart for sale
Medicament information for patients. What side effects?
where can i buy loperamide tablets
Some information about medicine. Read information here.
how to get generic florinef tablets
Выбор надежной площадки для ставок часто зависит от программы лояльности. Привлекательные бонусы букмекеров становятся решающим фактором при регистрации для многих беттеров. В условиях высокой конкуренции компании стараются предложить наиболее выгодные условия для своих клиентов.
buying generic super p-force without insurance
пинап зеркало: пин ап — пин ап
Drug information for patients. Brand names.
how can i get generic clomid pill
Some information about medicament. Read information now.
can you buy requip without insurance
I know this website offers quality dependent content and extra information, is there any other site which gives such stuff in quality?
where to buy avodart without prescription
https://1wintr.fun/# cazino
пин ап
how to buy celebrex tablets
Индустрия беттинга постоянно развивается и совершенствуется. Интересные новые бонусы БК появляются практически каждую неделю, предлагая игрокам уникальные возможности. Операторы ставок регулярно обновляют свои программы лояльности, чтобы удержать существующих клиентов и привлечь новых.
where buy avodart pill
Современные букмекеры предлагают различные варианты бесплатных ставок. Надежные БК с фрибетом дают возможность делать прогнозы без риска потери собственных средств. Такие предложения особенно популярны среди начинающих игроков.
Meds prescribing information. Cautions.
how to get generic cialis soft without dr prescription
All about drugs. Get now.
can i get generic glucotrol without prescription
sa gaming
SA Gaming เป็น แพลตฟอร์ม เกม บาคาร่า ออนไลน์ ที่ได้รับการยอมรับอย่างกว้างขวาง ใน วงการสากล ว่าเป็น หัวหน้าค่าย ในการให้บริการ เกม คาสิโนออนไลน์ โดยเฉพาะในด้าน เกมการ์ด บาคาร่า ซึ่งเป็น เกมส์ ที่ นักเล่น สนใจเล่นกัน ทั่วไป ใน คาสิโนจริง และ ออนไลน์ ด้วย ลักษณะการเล่น ที่ ง่าย การแทง เพียง ฝั่ง เพลเยอร์ หรือ เจ้ามือ และ ความเป็นไปได้ในการชนะ ที่ มีความเป็นไปได้สูง ทำให้ เกมพนันบาคาร่า ได้รับ ความนิยม อย่างมากใน ช่วงหลายปีนี้ โดยเฉพาะใน ประเทศไทย
หนึ่งในวิธีการเล่น ยอดนิยมที่ เอสเอ เกมมิ่ง แนะนำ คือ บาคาร่าเร็ว ซึ่ง ช่วยให้ผู้เล่น ต้องการ การตัดสินใจเร็ว และ การคิดไว สามารถ เดิมพันได้อย่างรวดเร็ว นอกจากนี้ยังมีโหมด ไม่มีค่าคอมมิชชั่น ซึ่งเป็น โหมด ที่ ไม่มีค่าใช้จ่ายเพิ่มเติม เมื่อชนะ การเดิมพัน ฝั่งแบงค์เกอร์ ทำให้ ฟีเจอร์นี้ ได้รับ ความนิยมมาก จาก ผู้เล่น ที่มองหา ความคุ้มค่า ในการ เดิมพัน
เกมการ์ด ของ เอสเอ เกมมิ่ง ยัง ได้รับการออกแบบ ให้มี กราฟิก และ ระบบออดิโอ ที่ เรียลไทม์ สร้างบรรยากาศ ที่ น่าตื่นเต้น เสมือนอยู่ใน คาสิโนจริง พร้อมกับ ตัวเลือก ที่ทำให้ ผู้เล่น สามารถเลือก วิธีแทง ที่ มีให้เลือกมากมาย ไม่ว่าจะเป็น การเดิมพัน ตามกลยุทธ์ ของตน หรือการ อิงกลยุทธ์ ให้ชนะ นอกจากนี้ยังมี ดีลเลอร์จริง ที่ ควบคุมเกม ในแต่ละ ห้อง ทำให้ การเล่น มี ความน่าสนุก มากยิ่งขึ้น
ด้วย วิธี ใน การเดิมพัน และ ความง่าย ในการ ร่วมสนุก SA Gaming ได้ สร้างสรรค์ เกมไพ่ ที่ ตอบโจทย์ ทุก ชนิด ของผู้เล่น ตั้งแต่ นักเล่นมือใหม่ ไปจนถึง นักพนัน มืออาชีพ
where can i get cheap furosemide without prescription
Drug information sheet. What side effects can this medication cause?
how can i get generic keflex without rx
Actual information about medicament. Read here.
cost of cheap shallaki pills
casino oyunlar?: en iyi casino siteleri — casino oyunlar?
Свежие анекдоты http://shutki-anekdoty.ru/anekdoty.
can i get generic fluoxetine without insurance
Веселые анекдоты http://shutki-anekdoty.ru/anekdoty.
Смешные анекдоты http://shutki-anekdoty.ru/anekdoty.
Прикольные анекдоты http://shutki-anekdoty.ru/anekdoty.
Medication information. What side effects can this medication cause?
can i purchase generic cipro tablets
All what you want to know about pills. Read information now.
Современные букмекеры предлагают различные варианты бесплатных ставок. Надежные БК с фрибетом дают возможность делать прогнозы без риска потери собственных средств. Такие предложения особенно популярны среди начинающих игроков.
A Quick Poker Training Network Review 3d 커스텀 소녀 에볼루션 설치
When some one searches for his vital thing, so he/she wishes to be available that in detail, thus that thing is maintained over here.
гамма официальный сайт
Asthma emergency response
Meds information leaflet. What side effects can this medication cause?
order generic lasix without insurance
All what you want to know about meds. Get here.
gama-casino-lucky.ru
Каждый новый клиент букмекерской конторы может рассчитывать на приветственные поощрения. Выгодные бонусы за регистрацию помогают начать делать ставки с минимальными рисками для собственного банкролла. Операторы ставок регулярно обновляют условия приветственных акций, делая их более привлекательными для новичков.
https://1winrussia.online/# 1хбет
пинап казино
h?zl? casino: dunyan?n en iyi casino siteleri — guvenilir casino siteleri
https://khdmety.com/kvartiry-na-sutki-v-gomele-snjat-kvartiru-8-2/
играть онлайн казино гама
https://www.toursforturkey.com/kvartiry-na-chasy-v-gomele-snjat-kvartiru-po-4.html
казино гама
Качественный беттинг-сервис всегда привлекает внимание опытных игроков. Популярный сайт радует пользователей высокими коэффициентами и быстрыми выплатами. Регулярные акции и бонусы делают ставки еще выгоднее.
https://novotelscz.com/2024/09/18/snjat-kvartiru-v-grodno-na-sutki-nedorogo-bez-16-2/
You can certainly see your enthusiasm within the article you write. The world hopes for even more passionate writers such as you who aren’t afraid to mention how they believe. Always go after your heart.
https://www.perrysrl.it/?p=88102
В современном беттинге бесплатные ставки стали стандартом качественного сервиса. Привлекательные фрибеты букмекеров дают возможность тестировать новые стратегии без риска. Важно помнить о сроках действия таких акций и условиях их использования.
https://darbifortalents.com/snjat-kvartiru-na-sutki-v-gomele-bystroe-21/
пин ап казино: pin up kz — пин ап кз
https://al-esnad.com.sa/blog/2024/09/18/arenda-kvartir-na-sutki-na-karte-v-grodno-11-2/
https://omniakamal.com/2024/09/18/snjat-kvartiru-v-gomele-na-sutki-i-chasy-34/
https://astrovrukshbyshefali.com/snjat-kvartiru-na-sutki-v-gomele-nedorogo-arenda-73/
india online pharmacy: indian pharmacies safe — pharmacy website india
https://notice.caltech.africa/2024/09/18/snjat-odnokomnatnuju-kvartiru-na-sutki-v-gomele-23/
Howdy! I just wish to give you a huge thumbs up for the excellent info you have got here on this post. I will be coming back to your blog for more soon.
https://learn.trc.or.th/2024/09/18/snjat-kvartiru-na-sutki-v-grodno-nedorogo-arenda-20/
indian pharmacy top online pharmacy india buy prescription drugs from india
Check the Etodolac in the comparative chart on this site
When my husband called him for the mold testing and he heard my symptoms he said-you have a gas leak.
Big savings on retail prices available here for your dexamethasone pharmacy at low prices
The doctor thinks, everytime my son gets overtired, his nose will then start to bleed.
People check out the price of buy pain pills online pharmacy is available online at the lowest possible medication price.
Denis Wilson June 15, 2015 at 3:40 am — Reply Hi ASis, I would suggest you try taking your temperature with a different thermometer.
https://ssinter.co.th/th/arenda-kvartir-na-sutki-v-gomele-arenda-kvartir-10/
Начинающие беттеры могут существенно увеличить свой стартовый банкролл. Выгодный бонус БК за регистрацию доступен сразу после создания аккаунта и верификации данных. Большинство контор предлагают несколько вариантов приветственных поощрений на выбор новых клиентов.
mexico drug stores pharmacies: reputable mexican pharmacies online — buying from online mexican pharmacy
https://littleandlovely.nl/2024/09/18/kvartiry-na-sutki-v-minske-snjat-kvartiru-19/
What’s the best Remeron solutions, visit us today!
These non-flu viruses include rhinovirus one cause of the common cold and respiratory syncytial virus RSV.
Is there a way to tell if a viagra online indian pharmacy from legitimate online pharmacies in order to get the best
Delayed periods may happen due to stress, nutritional deficiency or hormonal change.
п»їlegitimate online pharmacies india: Online medicine order — indian pharmacies safe
Give your wife the happiness she deserves. omeprazole pharmacy for all medications are available globallyIf not taken with
Keep in mind that treatment will probably not be effective if you continue to experience exposure to the mold.
оформление в собственность земли
https://kornel.mograt.hu/2024/09/18/kvartiry-na-chasy-v-gomele-snjat-kvartiru-po-34/
Для привлечения новых клиентов букмекеры разрабатывают специальные акции. Щедрый приветственный бонус БК становится отличным стартом для начинающих беттеров. Важно помнить, что такие предложения доступны только при первой регистрации на платформе.
Where can I find publications that discuss pharmacy bangkok viagra and have multiple orgasms?|
This month however, no period.
This is the right site for everyone who would like to find out about this topic. You understand a whole lot its almost tough to argue with you (not that I personally would want to…HaHa). You certainly put a new spin on a subject which has been discussed for decades. Wonderful stuff, just great!
Before you lexapro pharmacy assistance program ? What are the drawbacks?
Does this run in families?
документы для регистрации дома на земельном участке
Getting the real deal at viagra xlpharmacy affordably to treat your condition
If you spot mold on a hard surface in your home such as glass, plastic, or tile, clean it using a bleach solution, soap and water, or a commercial product.
Автоцистерны АЦН купить
https://holelisting.com/snjat-kvartiru-na-sutki-v-grodno-nedorogo-arenda-2/
Современные площадки для ставок постоянно совершенствуют программы лояльности для игроков. На сегодняшний день Бонусы букмекерских контор включают щедрые приветственные предложения, кэшбэк и специальные акции для постоянных клиентов. Все больше беттеров выбирают легальные конторы именно благодаря выгодным промо-предложениям и программам поощрения.
medications for: cheap online pharmacy — natural help for ed
вынос в натуру границ земельного участка цена
Продажа тройников стальных
top 10 pharmacies in india buy prescription drugs from india Online medicine home delivery
Nancy sinatra. https://t.me/inewsworldplanet
Современные букмекеры предлагают различные варианты бесплатных ставок. Надежные БК с фрибетом дают возможность делать прогнозы без риска потери собственных средств. Такие предложения особенно популярны среди начинающих игроков.
Asthma symptom severity relief approaches
If you desire to increase your know-how simply keep visiting this web page and be updated with the most up-to-date gossip posted here.
В мире спортивных ставок программы лояльности играют важную роль. Современная букмекерская контора бонус разрабатывает с учетом потребностей разных категорий игроков. Регулярные акции и специальные предложения помогают беттерам увеличивать прибыль от успешных прогнозов.
Оказание бухгалтерских услуг
согласование с соседями при межевании земельных участков
how quickly does levaquin work
Полуавтоматические котлы купить
как зарегистрировать дачный дом
Бесплатные ставки становятся все более популярными среди беттеров. Актуальные бонусы БК фрибеты помогают игрокам получить дополнительную прибыль без риска. Важно правильно использовать такие предложения, учитывая все условия букмекера.
indian pharmacy online: indian pharmacies safe — indian pharmacy
Мы занимаемся вывозом мусора газелями разной модификации от стандартных 6 м3 до больших 14 м3 есть также грузчики, работаем по Московской области. Преимущества вывоза мусора газелью в том, что она самая дешёвая услуга вывоза мусора.
Подробный гид по вывозу мусора газелью, не требующий лишних усилий.
Преимущества использования газели для вывоза мусора, которая убеждает.
Основные типы мусора, которые можно вывозить газелью, с учетом ограничений.
Минимальные стоимость услуги по вывозу мусора газелью, и сохранить качество проведенных работ.
Секрет успешного вывоза мусора газелью, соблюдая правила перевозки.
вывоз строительного мусора газелью вывоз мусора газелью .
Texas instruments. https://t.me/inewsworldplanet
cheapest place buy doxycycline
вынос границ участка
https://mexicanpharm1st.com/# mexico pharmacies prescription drugs
can you get cheap protonix prices
Индустрия беттинга развивается стремительными темпами, привлекая новых игроков. Разнообразные бонусы букмекеров помогают начинающим беттерам освоиться в мире ставок без значительных рисков. Операторы предлагают различные варианты поощрений, от увеличения первого депозита до страховки экспресс-ставок.
Thanks for every other magnificent article. Where else may just anybody get that type of info in such a perfect way of writing? I’ve a presentation next week, and I’m on the search for such information.
can i buy tinidazole without dr prescription
can you buy abilify price
prednisone 5mg tablets price
Возможность бесплатных ставок привлекает многих любителей беттинга. Щедрые фрибеты букмекеров помогают игрокам увеличить прибыль без дополнительных вложений. Каждая контора предлагает свои уникальные условия использования бесплатных пари.
prednisone domestic with no script
buying from online mexican pharmacy buying prescription drugs in mexico online mexican border pharmacies shipping to usa
Pills prescribing information. What side effects can this medication cause?
differences between diclofenac sodium ec and ibuprofen a comparative analysis
All trends of medication. Read information now.
can i purchase cheap zithromax prices
where can i get finasteride no prescription
sertraline zoloft indication
В мире спортивных ставок репутация площадки играет ключевую роль. Известный сайт заслужил доверие тысяч беттеров благодаря честной работе и выгодным условиям. Широкая линия и глубокая роспись позволяют найти оптимальные варианты для ставок.
how to get prescription drugs without doctor: prescription drugs without doctor approval — pain meds without written prescription
can i purchase synthroid
Drugs information. Brand names.
order generic zanaflex
Best information about meds. Get here.
can i purchase generic terramycin pills
can i buy ashwagandha online
generic atarax price
Medicines information. Effects of Drug Abuse.
cost of cheap zyban without dr prescription
Best trends of meds. Get now.
I don’t even know how I ended up here, but I thought this post was great. I do not know who you are but certainly you are going to a famous blogger if you are not already 😉 Cheers!
cheapest online pharmacy india: india pharmacy mail order — Online medicine home delivery
Nicely put. With thanks!
Have a look at my blog post … https://www.youtube7.com/
online pharmacy india: world pharmacy india — indian pharmacy online
Allergic conjunctivitis treatment tools
При выборе надежной букмекерской компании важно учитывать не только коэффициенты и линию. Актуальные Бонусы БК позволяют существенно увеличить стартовый капитал и получить дополнительные возможности для ставок. Многие операторы предлагают целые пакеты поощрений, включающие различные виды вознаграждений.
buy doxycycline hyclate 100mg capsules canada
Drug prescribing information. Brand names.
cost generic zoloft price
Some what you want to know about medicine. Read information now.
Индустрия беттинга развивается стремительными темпами, привлекая новых игроков. Разнообразные бонусы букмекеров помогают начинающим беттерам освоиться в мире ставок без значительных рисков. Операторы предлагают различные варианты поощрений, от увеличения первого депозита до страховки экспресс-ставок.
buy medicines online in india world pharmacy india best india pharmacy
where can i buy generic co-amoxiclav without prescription
Drug information. Cautions.
can i get cheap azathioprine pills
Some about medicament. Get here.
Мы занимаемся вывозом мусора газелями разной модификации от стандартных 6 м3 до больших 14 м3 есть также грузчики, работаем по Московской области. Преимущества вывоза мусора газелью в том, что она самая дешёвая услуга вывоза мусора.
Как организовать вывоз мусора газелью, с минимальными затратами.
Надежность газели при перевозке мусора, которые должен знать каждый.
Список разрешенных для перевозки грузов газелью, и какие ограничения существуют.
Экономия с вывозом мусора газелью, пользуясь опытом специалистов.
Основные правила безопасной перевозки мусора газелью, понимая особенности процесса.
вывоз строительного мусора газелью вывоз мусора газелью .
เกมสล็อต
ทดสอบเล่นสล็อต PG: สัมผัสประสบการณ์เกมสล็อตออนไลน์แบบสดใหม่
ก่อนลงมือเล่นสล๊อตออนไลน์ สิ่งที่ควรทำคือการทดลองกับการฝึกเล่นเสียล่วงหน้า เกมหมุนวงล้อ ทดลองเล่นสล็อตนั้นได้รับแรงบันดาลใจจากเครื่องสล็อตแบบดั้งเดิม โดยเฉพาะเจาะจงเป็นพิเศษ สล็อตสามทองคำ ที่ในอดีตเคยเป็นที่รู้จักอย่างมากในบ่อนคาสิโนต่างประเทศ ในเกม ลองเล่นสล็อต PG ผู้เล่นจะได้สัมผัสโครงสร้างของเกมการเล่นที่มีความง่ายดายและต้นตำรับ มาพร้อมกับวงล้อ (Reel) มากถึงห้าแถวและเส้นการจ่าย (เพย์ไลน์) หรือแนวทางการคว้ารางวัลที่มากถึง 15 แบบการจ่ายรางวัล ทำให้มีความน่าจะเป็นชนะได้หลากหลายมากยิ่งขึ้น
ไอคอนต่าง ๆ ในเกมนี้นี้ให้ความรู้สึกให้อารมณ์ของสล็อตเก่า โดยมีไอคอนที่เป็นที่รู้จักเช่น ผลเชอร์รี่ เลข 7 และไดมอนด์ ซึ่งนอกจากจะทำให้เกมมีความน่าสนใจแล้วยังเพิ่มโอกาสในการได้รับผลตอบแทนอีกด้วย
ความง่ายดายของเกมสล็อต PG
ทดลองเล่นเกม พีจี ในตัวเกมไม่ใช่แค่มีสไตล์การเล่นที่เล่นง่าย แต่ยังมีความง่ายดายอย่างมากๆ ไม่ว่าคุณจะใช้PCหรือโทรศัพท์มือถือรุ่นไหน เพียงแค่ต่อเชื่อมอินเทอร์เน็ต คุณก็อาจจะเข้าสู่เล่นได้ทันที ลองเล่น พีจี ยังถูกทำมาให้รองรับอุปกรณ์หลากหลายแบบ เพื่อให้ประสบการณ์การเล่นที่ราบรื่นไม่ชะงักแก่ผู้เล่นทุกราย
การคัดสรรธีมและสไตล์เกม
และจุดเด่นอีกข้อ เกมทดลองเล่น พีจี ยังมีจำนวนมากธีมให้ได้ลอง ไม่ว่าจะแนวไหนธีมที่น่าสนใจ น่าชื่นชอบ หรือธีมที่มีความสมจริง ทำให้ผู้เล่นได้สนุกสนานไปกับรูปแบบต่าง ๆตามรสนิยม
ด้วยคุณสมบัติทั้งหมดนี้ ลองเล่นเกมสล็อต PG ได้เป็นที่นิยมตัวเลือกที่นิยมในบรรดาคนที่สนใจเกมออนไลน์ที่กำลังมองหาประสบการณ์ใหม่ ๆและการเอาชนะที่ง่ายดายขึ้น หากคุณกำลังต้องการการเล่นที่ไม่ซ้ำใคร การลองเล่นสล็อตเป็นตัวเลือกที่คุณไม่ควรมองข้าม!
Thank you for some other fantastic post. Where else may just anybody get that type of info in such an ideal approach of writing? I’ve a presentation next week, and I am on the search for such info.
cost cheap aurogra no prescription
where can i buy cheap seroquel without insurance
Drug prescribing information. Brand names.
cheap valtrex no prescription
Some news about pills. Read information here.
Современные букмекеры предлагают различные варианты бесплатных ставок. Надежные БК с фрибетом дают возможность делать прогнозы без риска потери собственных средств. Такие предложения особенно популярны среди начинающих игроков.
pin-up casino giris: pinup-az bid — pin-up
can i purchase cheap vasotec without dr prescription
where to get celebrex without dr prescription
can i order generic allegra no prescription
can you buy generic macrobid pill
Опытные беттеры умеют максимально эффективно использовать программы лояльности. Привлекательные бонусы за депозит БК помогают увеличить банкролл и получить больше возможностей для ставок. Важно помнить о необходимости отыгрыша бонусных средств согласно правилам конторы.
Excellent article. Keep posting such kind of info on your blog. Im really impressed by it.
Hi there, You have done a great job. I will certainly digg it and individually suggest to my friends. I am confident they will be benefited from this website.
can i order generic co-amoxiclav online
where to buy cheap advair diskus price
Medicament information. Effects of Drug Abuse.
how can i get promethazine pills
All what you want to know about medicament. Read now.
http://pinup-az.bid/# pin-up casino giris
pin up win
Профессиональные игроки знают, как важно правильно использовать приветственные акции. Каждая букмекерская контора бонус предлагает по своим уникальным условиям и правилам. Опытные беттеры рекомендуют внимательно изучать требования по отыгрышу перед активацией промо-предложений.
cost cheap accutane for sale
buying clomid without rx
can you get cheap caduet price
can i buy generic proscar online
пин ап казино: пин ап казино — пины
Medicament information for patients. What side effects?
order cheap ramipril pill
Best news about drug. Read here.
Отношения: Понимание себя помогает строить более глубокие и значимые отношения с другими людьми Дизайн человека (Human design) — расчет карты онлайн
Профессиональный сервисный центр по ремонту Apple iPhone в Москве.
Мы предлагаем: ремонт айфона на дому в москве
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
https://sites.google.com/view/admiral777/
драгон казино
My coder is trying to convince me to move to .net from PHP. I have always disliked the idea because of the costs. But he’s tryiong none the less. I’ve been using WordPress on numerous websites for about a year and am nervous about switching to another platform. I have heard good things about blogengine.net. Is there a way I can import all my wordpress content into it? Any help would be really appreciated!
dragonmoney
https://vk.com/topic-227871919_52805338
https://robotech.com/forums/viewthread/2228851
https://sweetbonanzatr.pro/# sweet bonanza nas?l oynan?r
pin up casino
https://vk.com/topic-227871919_52805329
драгон мани
Hi, I think your blog might be having browser compatibility issues. When I look at your blog site in Chrome, it looks fine but when opening in Internet Explorer, it has some overlapping. I just wanted to give you a quick heads up! Other then that, wonderful blog!
pinup az: pinup — pin-up casino giris
В мире спортивных ставок репутация площадки играет ключевую роль. Известный сайт заслужил доверие тысяч беттеров благодаря честной работе и выгодным условиям. Широкая линия и глубокая роспись позволяют найти оптимальные варианты для ставок.
https://vk.com/topic-227871919_52805312
https://vk.com/topic-227871919_52805347
В мире спортивных ставок особой популярностью пользуются бесплатные пари. Проверенные БК с фрибетом позволяют получить дополнительные возможности для выигрыша. Внимательно изучайте условия использования бесплатных ставок для максимальной выгоды.
Профессиональный сервисный центр по ремонту Apple iPhone в Москве.
Мы предлагаем: сервисный центр iphone москва
Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
https://sites.google.com/view/pokerdom-casino-online/
My family all the time say that I am wasting my time here at web, however I know I am getting knowledge everyday by reading such nice articles.
https://www.furaffinity.net/user/pinupuz
https://biznes-fabrika.kz/# пинап казино
pinup bet and casino
В мире спортивных ставок особой популярностью пользуются бесплатные пари. Проверенные БК с фрибетом позволяют получить дополнительные возможности для выигрыша. Внимательно изучайте условия использования бесплатных ставок для максимальной выгоды.
https://vk.link/clubrossiyavulkan
http://ulutv.info/index.php?subaction=userinfo&user=usicobi
ทดลองเล่นสล็อต
ทดลองเล่นสล็อต PG: สัมผัสประสบการณ์เกมสล็อตออนไลน์แบบใหม่
ก่อนที่คุณจะเริ่มเล่นเกมสล็อตออนไลน์ สิ่งสำคัญคือการทำความรู้จักกับการทดลองเล่นเสียก่อน เกมสล็อต ทดลองเล่นสล็อต นั้นได้รับแรงบันดาลใจจากเครื่องสล็อตแบบดั้งเดิม โดยเฉพาะอย่างยิ่ง Triple Gold Slot ซึ่งเคยเป็นที่นิยมอย่างมากในคาสิโนต่างประเทศ ในเกมสล็อต ทดลองเล่นสล็อต PG ผู้เล่นจะได้สัมผัสกับรูปแบบของเกมที่มีความเรียบง่ายและคลาสสิก มาพร้อมกับรีล (Reel) จำนวน 5 แถวและเพย์ไลน์ (Payline) หรือรูปแบบการชนะรางวัลที่มากถึง 15 รูปแบบ ทำให้มีโอกาสชนะได้หลากหลายมากยิ่งขึ้น
สัญลักษณ์ต่าง ๆ ในเกมนี้สร้างความรู้สึกถึงบรรยากาศของสล็อตดั้งเดิม โดยมีสัญลักษณ์ที่เป็นที่รู้จักเช่น รูปเชอร์รี่ ตัวเลข 7 และเพชร ซึ่งนอกจากจะทำให้เกมมีความน่าสนใจแล้วยังเพิ่มโอกาสในการทำกำไรอีกด้วย
ความสะดวกสบายของเกมสล็อต PG
ทดลองเล่นสล็อต PG นั้นไม่เพียงแค่มีรูปแบบการเล่นที่เข้าใจง่าย แต่ยังมีความสะดวกสบายอย่างยิ่ง ไม่ว่าคุณจะใช้คอมพิวเตอร์หรือโทรศัพท์มือถือรุ่นใด เพียงแค่เชื่อมต่ออินเทอร์เน็ต คุณก็สามารถเข้าร่วมสนุกได้ทันที ทดลองเล่นสล็อต PG ยังถูกออกแบบมาให้รองรับอุปกรณ์หลากหลายประเภท เพื่อมอบประสบการณ์การเล่นที่ราบรื่นไม่ติดขัดแก่ผู้เล่นทุกคน
การเลือกธีมและรูปแบบเกม
ที่สำคัญ ทดลองเล่นสล็อต PG ยังมีหลากหลายธีมให้เลือกเล่น ไม่ว่าจะเป็นธีมที่น่าตื่นเต้น น่ารัก หรือธีมที่มีความสมจริง ทำให้ผู้เล่นสามารถสนุกสนานไปกับรูปแบบต่าง ๆ ตามความชอบ
ด้วยคุณสมบัติทั้งหมดนี้ ทดลองเล่นสล็อต PG ได้กลายเป็นตัวเลือกที่นิยมในหมู่ผู้เล่นเกมออนไลน์ที่กำลังมองหาความท้าทายใหม่ ๆ และการชนะที่ง่ายขึ้น หากคุณกำลังมองหาประสบการณ์ใหม่ ๆ การทดลองเล่นเกมสล็อตเป็นทางเลือกที่คุณไม่ควรพลาด!
https://vk.link/leonbet_casino
pinco: пинко — пин ап вход
Индустрия беттинга постоянно развивается и совершенствуется. Интересные новые бонусы БК появляются практически каждую неделю, предлагая игрокам уникальные возможности. Операторы ставок регулярно обновляют свои программы лояльности, чтобы удержать существующих клиентов и привлечь новых.
https://sites.google.com/view/pokerdom-online/
You can certainly see your expertise in the work you write. The world hopes for even more passionate writers like you who are not afraid to say how they believe. All the time go after your heart.
В современном беттинге бесплатные ставки стали стандартом качественного сервиса. Привлекательные фрибеты букмекеров дают возможность тестировать новые стратегии без риска. Важно помнить о сроках действия таких акций и условиях их использования.
ลอตเตอรี่ การเล่น ยี่กีเป็น ฟอร์ม การ เล่นพนัน หวย
ซึ่ง ได้รับความ ความชื่นชม อย่างมากใน บ้านเมือง ไทย ซึ่งมี คล้ายคลึงกับ กับหวย ลอตเตอรี่ทั่วไป แต่มี ความแตกต่างไปจาก ในด้าน การตัดเลือก ตัวเลข
และช่องทาง ในการซื้อ
กระจายสินค้า
การ ทดลองเล่น หวยยี่กีนั้น ผู้ ลงทุน
จะ เลือกได้ เลขชุด จำนวน 2-3 ตัวเลขมงคล ซึ่ง หรืออาจ เป็นตัวเลข ที่มีความหมาย หรือตัวเลข ที่
เกิดขึ้น ในความเชื่อถือ ของ บุคคล จากนั้น ส่ง
หมายเลข เหล่านั้นไปซื้อ ที่ ช่องทางจำหน่าย
จำหน่ายหวย ยี่กี ซึ่ง โดยส่วนใหญ่ จะเป็น
ร้านจำหน่าย ปลีก ทั้งหมด ในชุมชน
เหตุผลที่ ทำให้ การพนัน ยี่กี ได้รับการยอมรับ
มาก ก็เพราะว่า ผลตอบแทน การ ทำรางวัล ของรางวัล
ซึ่ง โดยทั่วไป จะสูง หวย รัฐบาล โดยเฉพาะ กรณีที่ หมายเลขที่ ถูกมา เป็น หมายเลขที่ อันใด ไม่ค่อย ใน ลอตเตอรี่
รัฐบาล ซึ่งก็ ทำให้ ผู้ พนัน
อาจได้รับ ผล ผลรางวัล อันที่
สูงมาก หากเลข ที่ เลือกสรร ถูกรางวัล
อย่างไร ที่ การ ทดลองเล่น การเดิมพัน ยี่กีนั้นก็มี
ความเสี่ยงอย่างมาก มากที่สุด
เนื่องจากเป็น การ ลงเดิมพัน อันที่ อาศัย ความโชคดี
เป็นหลัก ซึ่งอาจ ทำให้ผู้ ซื้อ สูญเสีย เงินทั้งหมด ในกรณีที่ ไม่ถูก รางวัล ดังนั้น จึงควร ทำการ ด้วยการ ความ ระวังระมัด
ในภาพรวม ลอตเตอรี่
ยี่กีถือเป็น กิจกรรมการพนัน ที่ได้รับ อย่าง มากมายในประเทศ ใน ชาติ ไทย แม้ว่าจะ มีความ
ความเสี่ยงอย่างมาก มากเกินไป แต่ก็ยังมี ที่ให้ ความ ความสนใจ และเล่น
ลอตเตอรี่ ยี่กีอย่าง ต่อเนื่อง ทั้ง เพื่าจะ คาดหวัง
ผล ผลรางวัล อันใด มากกว่า
และ เพื่าจะ ต้องการแสวงหา
ความตื่นเต้น จาก การเดิมพัน
my site … เล่นคาสิโนออนไลน์ได้เงินจริง [pinterest.com]
Профессиональные беттеры ценят надежность и функциональность площадки для ставок. Современный сайт предоставляет полный спектр услуг для комфортного беттинга. Удобная навигация и оперативные выплаты делают игру максимально приятной.
https://mastodon.scot/@pinupuz
https://vk.link/slotozal_games
pinco: Официальный Сайт — пин ап казино
สล็อตทดลอง
ทดสอบเล่นสล็อต PG: สัมผัสประสบการณ์เกมสล๊อตออนไลน์แบบสดใหม่
ก่อนที่คุณจะเริ่มเล่นสล๊อตออนไลน์ สิ่งที่ควรทำคือการทำความรู้จักกับการทดสอบเล่นเสียลำดับแรก เกม ทดลองเล่นสล็อตนั้นถูกสร้างสรรค์จากจากสล็อตแมชชีนแบบโบราณ โดยเฉพาะเจาะจงเป็นพิเศษ สล็อตสามทองคำ ที่ในอดีตเคยเป็นที่แพร่หลายอย่างล้นหลามในคาสิโนต่างแดน ในเกมสล็อต ทดลองเล่นสล๊อต พีจี ผู้เล่นจะได้เข้าถึงโครงสร้างของเกมการเล่นที่มีความง่ายดายและคลาสสิก มาพร้อมกับรีล (Reel) จำนวนจำนวนห้าแถวและเพย์ไลน์ (Payline) หรือแนวทางการได้รับรางวัลที่มากถึง 15 รูปแบบ ทำให้มีความน่าจะเป็นชนะได้หลากหลายมากยิ่งขึ้น
ไอคอนต่าง ๆ ในเกมนี้นี้ให้ความรู้สึกเหมือนบรรยากาศของสล็อตดั้งเดิม โดยมีไอคอนที่เป็นที่รู้จักเช่น รูปเชอร์รี่ เลขเจ็ด 7 และเพชร ที่จะทำให้ตัวเกมน่าดึงดูดแล้วยังเสริมช่องทางในการทำกำไรอีกด้วย
ความง่ายดายของเกม PG
ทดลองเล่นสล็อต พีจี ในส่วนนี้ไม่ใช่แค่มีวิธีการการเล่นที่เข้าใจง่าย แต่ยังมีความสะดวกสบายอย่างมากๆ ไม่ว่าจะใช้PCหรือมือถือรุ่นไหน เพียงเชื่อมต่ออินเทอร์เน็ต คุณก็อาจจะเข้าสู่สนุกได้ทันที ทดลองเล่นสล็อต PG ยังถูกสร้างมาให้เหมาะสมกับอุปกรณ์หลากหลายลักษณะ เพื่อให้ประสบการณ์การเล่นที่ไม่สะดุดไม่ติดขัดแก่ผู้ใช้งานทุกท่าน
การคัดสรรธีมและการเล่นในเกม
และคุณสมบัติที่น่าสนใจ เกมทดลองเล่น PG ยังมีจำนวนมากธีมให้เลือกเล่น โดยไม่จำกัดธีมที่น่าสนุก น่าเอ็นดู หรือธีมที่มีความสมจริง ทำให้ผู้เล่นสามารถได้อรรถรสไปกับแนวทางใหม่ ๆตามรสนิยม
เนื่องจากจุดเด่นเหล่านี้ เกมทดลองเล่น PG ได้เป็นที่ชื่นชอบตัวเลือกที่ได้รับความนิยมในหมู่ผู้เล่นเกมออนไลน์ที่กำลังแสวงหาประสบการณ์ใหม่ ๆและการชนะที่ง่ายขึ้น หากคุณกำลังแสวงหาการเล่นที่ไม่ซ้ำใคร การลองเล่นสล็อตเป็นทางเลือกที่คุณไม่ควรพลาด!
TANGKASDARAT is a thrilling experience!
TANGKASDARAT
казино гамма
http://sweetbonanzatr.pro/# sweet bonanza oyna
pin up zerkalo
cost of generic zovirax without insurance
sweet bonanza tr: sweet bonanza — sweetbonanzatrpro
Wonderful site. A lot of useful information here. I’m sending it to a few pals ans also sharing in delicious. And obviously, thank you to your sweat!
Большинство людей беспомощны, они живут вслепую, под влиянием среды, социума, игнорируют собственную программу, заложенную в момент рождения Дизайн Человека подробно
gluckspilz osnabruck
Опытные беттеры умеют максимально эффективно использовать программы лояльности. Привлекательные бонусы за депозит БК помогают увеличить банкролл и получить больше возможностей для ставок. Важно помнить о необходимости отыгрыша бонусных средств согласно правилам конторы.
Букмекерские конторы постоянно конкурируют за внимание игроков. Привлекательные новые бонусы БК становятся важным инструментом в борьбе за клиентов на беттинг-рынке. Каждая акция имеет свои уникальные условия и преимущества для беттеров.
big bigul india.com