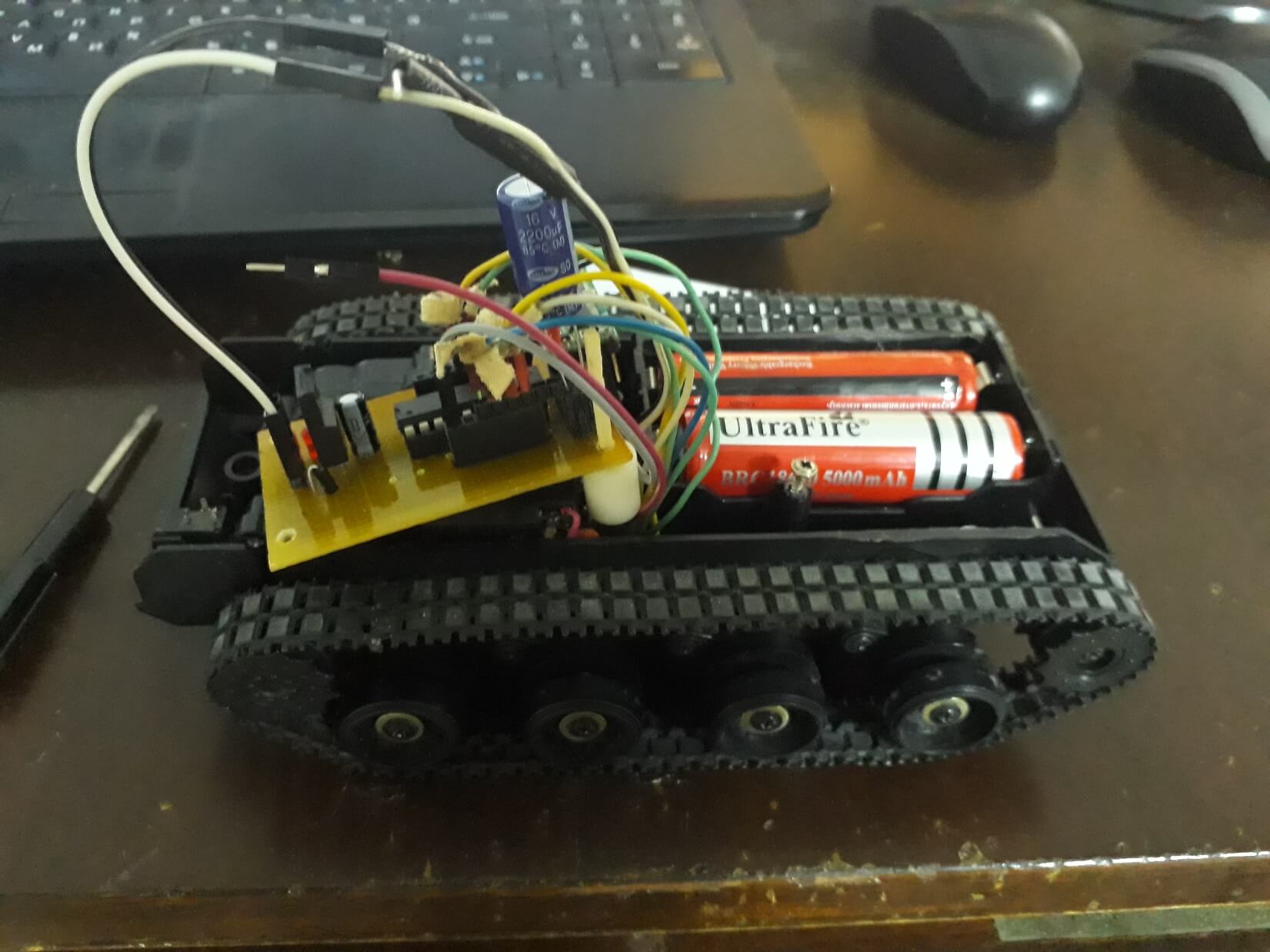
 В данной статье пойдёт речь о том как сделать машинку на радиоуправлении своими руками на базе микроконтроллера ATtiny2313. Другими словами — изобретаем велосипед, ибо по интернетам есть тонны примеров на Arduino и без Arduino. Несмотря на это, я тоже решил внести свою лепту.
В данной статье пойдёт речь о том как сделать машинку на радиоуправлении своими руками на базе микроконтроллера ATtiny2313. Другими словами — изобретаем велосипед, ибо по интернетам есть тонны примеров на Arduino и без Arduino. Несмотря на это, я тоже решил внести свою лепту.
Я не очень люблю работать с Arduino, так как не чувствуется сама идея работы с микроконтроллерами, всё спрятано в библиотеках и, если что-то нужно, просто скачиваешь нужную либу, устанавливаешь её и используешь, а как и что там в большинстве случаев остаётся тайной.
- 1 Для изготовления машинки, нам понадобится
- 2 Почему микроконтроллер ATtiny2313
- 3 Принцип работы программы на МК ATtiny2313
- 4 Схема подключения компонентов
- 5 Программа для управления
- 6 Код программы для ATtiny2313
- 7 Исходники и Java приложение
- 8 Маленькое видео
- 9 Купить компоненты на AliExpress
- 10 Похожие записи
Для изготовления машинки, нам понадобится
- микроконтроллер ATtiny2313;
- готовое шасси вместе с двигателями (танк или двухколёсный кит);
- HC-11, HC-12, TB387 или любые доступные USART радио-модули — две штуки;
- L298 — модуль драйвера двигателей;
- Аккумуляторы 18650 Li-ion — две штуки;
- Коробка (бокс) под аккумуляторы 18650 (на 2 аккумулятора);
- Преобразователь USB-UART на базе CH340G или PL2303HX;
- USBasp v2.0 ISP программатор
Ссылки на Aliexpress на всё это добро вы найдёте в конце статьи.
Почему микроконтроллер ATtiny2313
Микроконтроллер ATTiny2313 улучшенный вариант старого микроконтроллера AT90S2313. Внутри у него 120 инструкций оптимизированных для программирования на языках высокого уровня, 32 регистра общего назначения, 2 килобайта флеш-памяти для программ, 128 байт EEPROM (энергонезависимая память) и 128 байт SRAM (оперативная память). Из периферии: один 8 битный таймер/счетчик, один 16 битный таймер/счетчик, четыре ШИМ канала, 2 из которых будут использованы для управления колёсами, аналоговый компаратор, Watchdog таймер, USI универсальный последовательный интерфейс и, самое главное для данного проекта, USART. Если фьюзы выставлены на работу от внешнего кварца, кварц должен быть установлен на частоту, не превышающей максимальную по даташиту, это 20МГц.
Все вышеперечисленные характеристики более чем достаточно для наших задач. К тому же ATTiny2313 не дорогой и доступный микроконтроллер, в отличии от Arduino.

Принцип работы программы на МК ATtiny2313
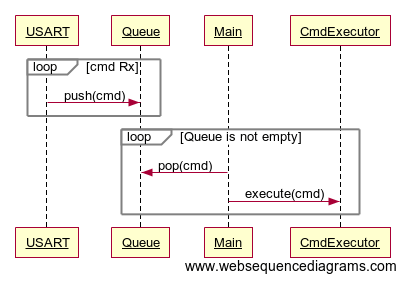
Сама программа состоит из 3-х классов (USART, Queue, CmdExecutor) и основного файла main.cpp, который содержит функцию main(). Класс USART отвечает за инициализацию протокола и получения данных, в нашем случае данные — это команды. После получения, команда добавляется, push(cmd), в очередь Queue. Класс Queue, он же очередь, имеет два метода push(cmd) и pop(cmd). С помощью первого метода, как мы уже сказали, добавляем команды в очередь, а вторым, соответственно берём первую команду из очереди. В функции main() и проверяется если в очереди есть команды. Если команда нашлась main() берёт её и передаёт классу CmdExecutor, он же исполнитель команд, выполняет её — execute(cmd).
Для чего нужна была очередь команд, нельзя было просто выполнять команды сразу после получения, а не тратить время и ресурсы не очень-то и мощного ATtiny2313? Да, можно было, можно было вообще сделать этот пример из двух функций: main() и ISR(USART_RX_vect), и гуляй Вася. Однако не так, во первых, если одна команда выполняется очень много времени, а другая уже на подходе, то как тут быть? Во вторых, если микроконтроллер помимо команд выполняет ещё и другую работу, тоже очень важную, а мы эту работу будем остановить очень часто, тогда может выйти так, что результат будет не тот, да и команды не правильно могут выполнятся, особенно тогда, когда и команда и работа используют те же ресурсы.
Схема подключения компонентов
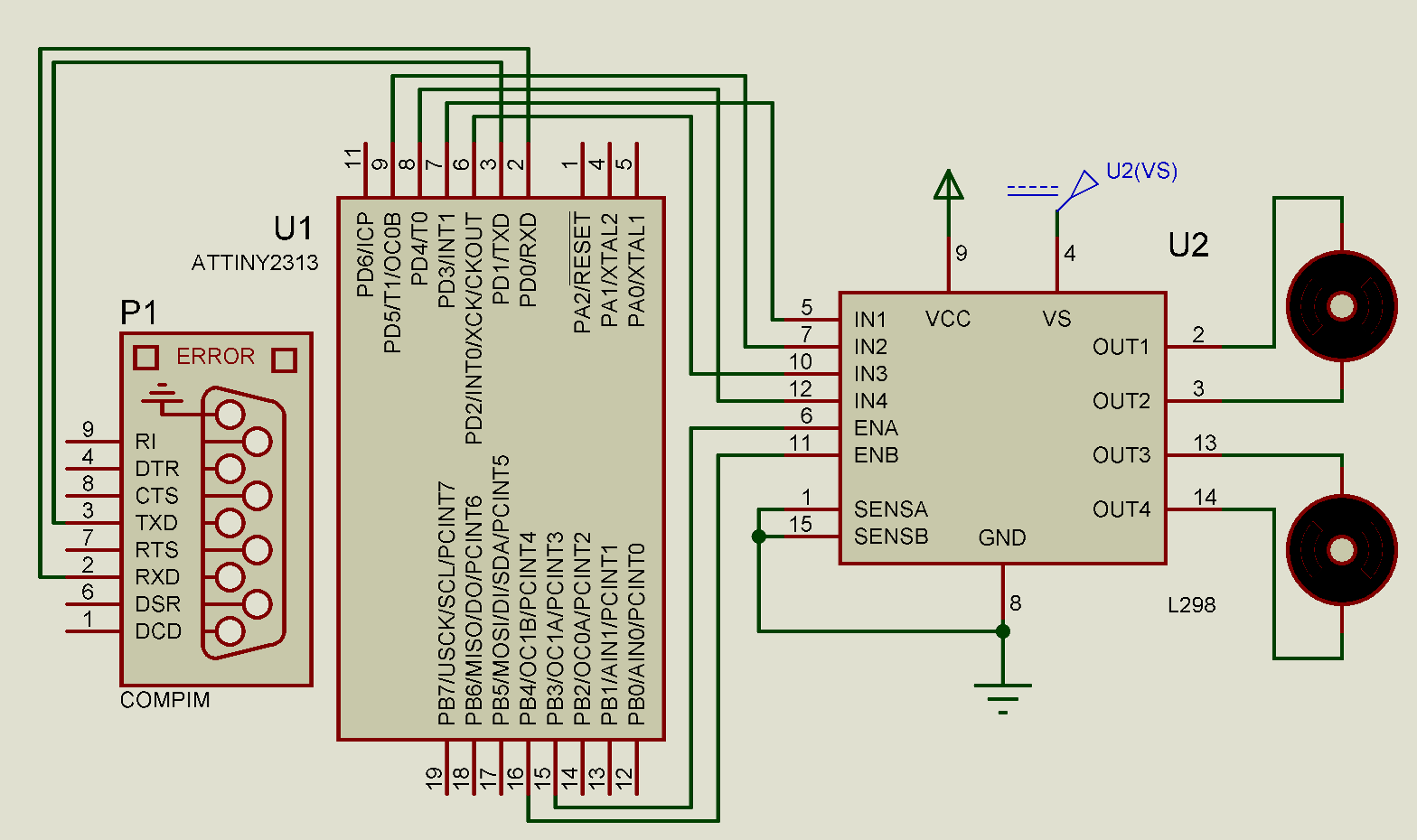 P1 (COMPIM) — COM порт, на реальной машине его нужно заменить на USART радио модуля, к примеру: HC-11, HC-12, TB387 или на любого доступного.
P1 (COMPIM) — COM порт, на реальной машине его нужно заменить на USART радио модуля, к примеру: HC-11, HC-12, TB387 или на любого доступного.
U1 (ATTINY2313) — микроконтроллер
U2 (L298) — модуль драйвера двигателей
Программа для управления
Управлять «бэтмобиль» можно было и с помощью пульта. Однако написать программу на Джаве намного легче, чем взять паяльник в руки и пилить пульт, да и программу можно сделать с большим функционалом, что-то добавить, что-то отображать, другое сделать конфигурируемым и вообще — возможности почти безграничны.
В моём случае эта программа всего лишь отправляет команды по USART, т.е. делает необходимый минимум задач.
Как установить Rx Tx в Java смотрим здесь, а пример приложения здесь.
Список команд
private static final byte PWM1 = '1';— 1-я скорость;private static final byte PWM2 = '2';— 2-я скорость;private static final byte PWM3 = '3';— 3-я скорость;private static final byte PWM4 = '4';— 4-я скорость;private static final byte PWM5 = '5';— максимальная скорость;private static final byte STOP = 'a';— стоп машина;private static final byte START = 'b';— старт машина, включаются периферия и ШИМ, команда выполняется при включении машины;private static final byte RIGHT_FORWARD = 'c';— правая гусеница движется вперёд;private static final byte LEFT_FORWARD = 'd';— левая гусеница движется вперёд;private static final byte RIGHT_BACK = 'e';— правая гусеница движется назад;private static final byte LEFT_BACK = 'f';— левая гусеница движется назад;private static final byte ALL_FORWARD = 'g';— обе гусеницы движутся вперёд;private static final byte ALL_BACK = 'h';— обе гусеницы движутся назад;private static final byte LEFT_STOP = 'i';— левая гусеница остановлена;private static final byte RIGHT_STOP = 'j';— правая гусеница остановлена;private static final byte STOP_ALL = 'k';— обе гусеницы остановлены;
Управление
- 5 скоростных режимов (кнопки от 1 до 5);
- Движение вперёд — обе гусеницы движутся вперёд (↑↑), нажата стрелка вверх (↑);
- Движение назад — обе гусеницы движутся назад (↓↓), нажата стрелка вниз (↓);
- Движение вперёд и направо — правая гусеница остановлена, левая движется вперёд (↑■), нажаты стрелки вверх и направо(↑→);
- Движение вперёд и налево — левая гусеница остановлена, правая движется вперёд (■↑), нажаты стрелки вверх и налево (←↑);
- Движение назад и направо — правая гусеница остановлена, левая движется назад (↓■), нажаты стрелки вниз и направо (↓→);
- Движение назад и налево — левая гусеница остановлена, правая движется назад (■↓), нажаты стрелки вниз и налево (←↓);
- Движение по кругу по часовой — левая гусеница движется назад, правая движется вперёд (↓↑), нажата стрелка налево (←);
- Движение по кругу против часовой — правая гусеница движется назад, левая движется вперёд (↑↓), нажата стрелка направо (→);
Вывод на консоль
После нажатия стрелок в консоли появятся знаки, указывающие движение машины/танка:
↑↑
■■
↓↑
■■
↑↓
■■
↓↓
■■
↑↑
■↑
↑↑
↑■
↑↑
■■
↓↓
■↓
↓↓
↓■
↓↓
■■
Настройки программы
Выход из программы: USART->Exit или Alt-F4;
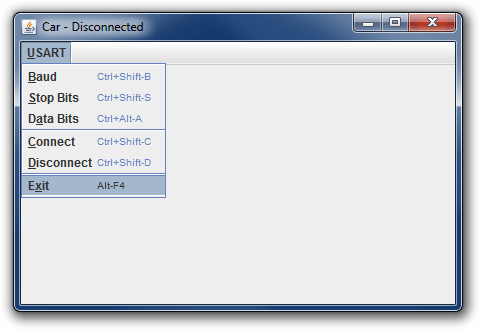
Подключение: USART->Connect или Ctrl+Alt-C и выбираем COM порт;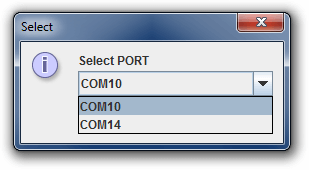
Настройка скорости: USART->Baud или Ctrl+Alt-B и выбираем скорость передачи данных, по умолчанию 9600, такаяже установлена и в прошивке. Настроить следует перед тем, как подключиться;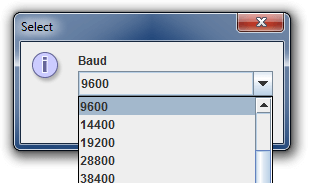 Настроить можно число стоп битов и число битов данных, но в нашем случае их лучше оставить 1 и 8 соответственно.
Настроить можно число стоп битов и число битов данных, но в нашем случае их лучше оставить 1 и 8 соответственно.
Код программы для ATtiny2313
Программа для ATtiny2313 написана на C++, а проект сделал в Eclipse C++. Как настроить Eclipse C/C++ для программирования AVR микроконтроллеров смотрите здесь.
main.cpp
#include <avr/io.h>
#include <util/delay.h>
#include <avr/interrupt.h>
#include "USART.h"
#include "CmdExecutor.h"
#include "Queue.h"
void pushData(uint8_t data) {
cmdQueue.push(data);
}
int main() {
usart.init(9600);
usart.setOnReceiveFunction(pushData);
sei();
cmdExecutor.cmdStart();
uint8_t cmd;
while (1) {
if (cmdQueue.pop(cmd)) {
cmdExecutor.execute(cmd);
}
_delay_ms(1);
}
return 1;
}
Queue.h
#ifndef QUEUE_H_
#define QUEUE_H_
#define QUEUE_SIZE 4
class Queue {
private:
uint8_t queueSize;
uint8_t data[QUEUE_SIZE];
public:
Queue();
void push(uint8_t);
uint8_t pop(uint8_t&);
};
extern Queue cmdQueue;
#endif /* QUEUE_H_ */
Queue.cpp
#include <avr/io.h>
#include <stdlib.h>
#include "Queue.h"
Queue cmdQueue;
Queue::Queue() :
queueSize(0) {
}
void Queue::push(uint8_t cmd) {
if (this->queueSize < QUEUE_SIZE) {
this->data[this->queueSize] = cmd;
this->queueSize++;
}
}
uint8_t Queue::pop(uint8_t&cmd) {
if (this->queueSize > 0) {
this->queueSize--;
cmd = this->data[0];
for (uint8_t i = 0; i < this->queueSize; i++) {
this->data[i] = this->data[i + 1];
}
return 1;
}
return 0;
}
CmdExecutor.h
#ifndef CMDEXECUTOR_H_
#define CMDEXECUTOR_H_
#define LEFT_PWM_DDR DDRB
#define RIGTH_PWM_DDR DDRB
#define LEFT_PWM_PIN PINB3
#define RIGTH_PWM_PIN PINB4
#define LEFT_DDR_FORWARD DDRD
#define RIGTH_DDR_FORWARD DDRD
#define LEFT_DDR_BACK DDRD
#define RIGTH_DDR_BACK DDRD
#define LEFT_PORT_FORWARD PORTD
#define RIGTH_PORT_FORWARD PORTD
#define LEFT_PORT_BACK PORTD
#define RIGTH_PORT_BACK PORTD
#define LEFT_PIN_FORWARD PIND2
#define RIGTH_PIN_FORWARD PIND3
#define LEFT_PIN_BACK PIND4
#define RIGTH_PIN_BACK PIND5
#define PWM1 '1'
#define PWM2 '2'
#define PWM3 '3'
#define PWM4 '4'
#define PWM5 '5'
#define STOP 'a'
#define START 'b'
#define RIGHT_FORWARD 'c'
#define LEFT_FORWARD 'd'
#define RIGHT_BACK 'e'
#define LEFT_BACK 'f'
#define ALL_FORWARD 'g'
#define ALL_BACK 'h'
#define LEFT_STOP 'i'
#define RIGHT_STOP 'j'
#define STOP_ALL 'k'
class CmdExecutor {
public:
CmdExecutor();
void execute(uint8_t);
void cmdStart();
void cmdStop();
void cmdRightForward();
void cmdLeftForward();
void cmdRightBack();
void cmdLeftBack();
void cmdAllForward();
void cmdAllBack();
void cmdStopAll();
void cmdStopLeft();
void cmdStopRight();
void cmdPwm1();
void cmdPwm2();
void cmdPwm3();
void cmdPwm4();
void cmdPwm5();
};
extern CmdExecutor cmdExecutor;
#endif /* CMDEXECUTOR_H_ */
CmdExecutor.cpp
#include <stdint.h>
#include <avr/io.h>
#include <avr/interrupt.h>
#include "USART.h"
#include "CmdExecutor.h"
CmdExecutor cmdExecutor;
CmdExecutor::CmdExecutor() {
}
void CmdExecutor::execute(uint8_t cmd) {
switch (cmd) {
case STOP:
cmdStop();
break;
case START:
cmdStart();
break;
case RIGHT_FORWARD:
cmdRightForward();
break;
case LEFT_FORWARD:
cmdLeftForward();
break;
case RIGHT_BACK:
cmdRightBack();
break;
case LEFT_BACK:
cmdLeftBack();
break;
case ALL_FORWARD:
cmdAllForward();
break;
case ALL_BACK:
cmdAllBack();
break;
case LEFT_STOP:
cmdStopLeft();
break;
case RIGHT_STOP:
cmdStopRight();
break;
case PWM1:
cmdPwm1();
break;
case PWM2:
cmdPwm2();
break;
case PWM3:
cmdPwm3();
break;
case PWM4:
cmdPwm4();
break;
case PWM5:
cmdPwm5();
break;
case STOP_ALL:
cmdStopAll();
break;
default:
break;
}
}
void CmdExecutor::cmdStart() {
LEFT_DDR_FORWARD |= 1 << LEFT_PIN_FORWARD;
RIGTH_DDR_FORWARD |= 1 << RIGTH_PIN_FORWARD;
LEFT_DDR_BACK |= 1 << LEFT_PIN_BACK;
RIGTH_DDR_BACK |= 1 << RIGTH_PIN_BACK;
LEFT_PWM_DDR |= 1 << LEFT_PWM_PIN;
RIGTH_PWM_DDR |= 1 << RIGTH_PWM_PIN;
cmdStopAll();
TCCR1A |= 1 << COM1A1 | 1 << COM1B1 | 1 << WGM11 | 1 << WGM10;
TCCR1B |= 1 << WGM12 | 1 << CS11 | 1 << CS10;
cmdPwm3();
cmdPwm3();
}
void CmdExecutor::cmdStop() {
cmdStopAll();
LEFT_PWM_DDR &= ~(1 << LEFT_PWM_PIN);
RIGTH_PWM_DDR &= ~(1 << RIGTH_PWM_PIN);
TCCR1A &= ~(1 << COM1A1 | 1 << COM1B1 | 1 << WGM11 | 1 << WGM10);
TCCR1B &= ~(1 << WGM12 | 1 << CS11 | 1 << CS10);
}
void CmdExecutor::cmdRightForward() {
cmdStopRight();
RIGTH_PORT_FORWARD |= (1 << RIGTH_PIN_FORWARD);
}
void CmdExecutor::cmdLeftForward() {
cmdStopLeft();
LEFT_PORT_FORWARD |= (1 << LEFT_PIN_FORWARD);
}
void CmdExecutor::cmdRightBack() {
cmdStopRight();
RIGTH_PORT_BACK |= (1 << RIGTH_PIN_BACK);
}
void CmdExecutor::cmdLeftBack() {
cmdStopLeft();
LEFT_PORT_BACK |= (1 << LEFT_PIN_BACK);
}
void CmdExecutor::cmdAllForward() {
cmdStopAll();
LEFT_PORT_FORWARD |= (1 << LEFT_PIN_FORWARD);
RIGTH_PORT_FORWARD |= (1 << RIGTH_PIN_FORWARD);
}
void CmdExecutor::cmdAllBack() {
cmdStopAll();
LEFT_PORT_BACK |= (1 << LEFT_PIN_BACK);
RIGTH_PORT_BACK |= (1 << RIGTH_PIN_BACK);
}
void CmdExecutor::cmdStopAll() {
LEFT_PORT_FORWARD &= ~(1 << LEFT_PIN_FORWARD);
RIGTH_PORT_FORWARD &= ~(1 << RIGTH_PIN_FORWARD);
LEFT_PORT_BACK &= ~(1 << LEFT_PIN_BACK);
RIGTH_PORT_BACK &= ~(1 << RIGTH_PIN_BACK);
}
void CmdExecutor::cmdPwm1() {
OCR1A = 204;
OCR1B = 204;
}
void CmdExecutor::cmdPwm2() {
OCR1A = 408;
OCR1B = 408;
}
void CmdExecutor::cmdPwm3() {
OCR1A = 612;
OCR1B = 612;
}
void CmdExecutor::cmdPwm4() {
OCR1A = 816;
OCR1B = 816;
}
void CmdExecutor::cmdStopLeft() {
LEFT_PORT_FORWARD &= ~(1 << LEFT_PIN_FORWARD);
LEFT_PORT_BACK &= ~(1 << LEFT_PIN_BACK);
}
void CmdExecutor::cmdStopRight() {
RIGTH_PORT_FORWARD &= ~(1 << RIGTH_PIN_FORWARD);
RIGTH_PORT_BACK &= ~(1 << RIGTH_PIN_BACK);
}
void CmdExecutor::cmdPwm5() {
OCR1A = 1023;
OCR1B = 1023;
}
USART.h
#ifndef USART_H_
#define USART_H_
class USART {
private:
typedef void (*OnReceiveFunction)(uint8_t);
public:
OnReceiveFunction onReceiveFunction;
USART();
void init(uint16_t);
void setOnReceiveFunction(OnReceiveFunction);
// Отправка байта
void transmitChar(char);
// Отправка строки
void transmitString(char*);
// Отправка строки
void transmitStringLn(char*);
// Получение байта
char receiveChar();
};
extern USART usart;
#endif /* USART_H_ */
USART.cpp
#include <stdint.h>
#include <avr/io.h>
#include <avr/interrupt.h>
#include "USART.h"
USART usart;
ISR(USART_RX_vect) {
if (usart.onReceiveFunction) {
usart.onReceiveFunction(UDR);
}
}
USART::USART() :
onReceiveFunction(0) {
}
void USART::init(uint16_t baud) {
uint16_t ubrr = F_CPU / 16 / baud - 1;
UBRRH = (unsigned char) (ubrr >> 8);
UBRRL = (unsigned char) (ubrr);
// RXC - завершение приёма
// |TXC - завершение передачи
// ||UDRE - отсутствие данных для отправки
// |||FE - ошибка кадра
// ||||DOR - ошибка переполнение буфера
// |||||PE - ошибка чётности
// ||||||U2X - Двойная скорость
// |||||||MPCM - Многопроцессорный режим
// ||||||||
// 76543210
UCSRA = 0;
// RXCIE - прерывание при приёме данных
// |TXCIE - прерывание при завершение передачи
// ||UDRIE - прерывание отсутствие данных для отправки
// |||RXEN - разрешение приёма
// ||||TXEN - разрешение передачи
// |||||UCSZ2 - UCSZ0:2 размер кадра данных
// ||||||RXB8 - 9 бит принятых данных
// |||||||TXB8 - 9 бит переданных данных
// ||||||||
// 76543210
// разрешен приём и передача данных, прерывание при приёме данных
UCSRB = 1 << RXEN | 1 << TXEN | 1 << RXCIE;
// URSEL - всегда 1
// |UMSEL - режим: 1-синхронный 0-асинхронный
// ||UPM1 - UPM0: 1 чётность
// |||UPM0 - UPM0: 1 чётность
// ||||USBS - стоп биты: 0-1, 1-2
// |||||UCSZ1 - UCSZ0: 2 размер кадра данных
// ||||||UCSZ0 - UCSZ0: 2 размер кадра данных
// |||||||UCPOL - в синхронном режиме - тактирование
// ||||||||
// 76543210
// 8-битовая посылка, 2 стоп бита
UCSRC = 1 << USBS | 1 << UCSZ0 | 1 << UCSZ1;
}
void USART::setOnReceiveFunction(OnReceiveFunction onReceiveFunction) {
this->onReceiveFunction = onReceiveFunction;
}
// Отправка байта
void USART::transmitChar(char c) {
// Устанавливается, когда регистр свободен
while (!( UCSRA & (1 << UDRE))) {
}
UDR = c;
}
// Отправка строки
void USART::transmitString(char str[]) {
while (*str) {
transmitChar(*str++);
}
}
// Отправка строки
void USART::transmitStringLn(char str[]) {
transmitString(str);
transmitChar((char) 13);
transmitChar((char) 10);
}
// Получение байта
char USART::receiveChar(void) {
// Устанавливается, когда регистр свободен
while (!(UCSRA & (1 << RXC))) {
}
return UDR;
}
Исходники и Java приложение
Проект на C++: ATtiny2313_Car — C++.zip
Проект на Java : ATtiny2313_Car — Java.zip
Java приложение: ATiny2313_Car-1.0.0.jar.zip
Маленькое видео









Можно поподробнее как компилировать что для чего ато ничего ни понимаю что в микрокантролер что куда напишите пожалуйста
1Win — онлайн-казино с широкой линейкой игровых автоматов, живыми дилерами и ставками на спорт. Платформа предлагает высокие коэффициенты, бонусы и акции для игроков. Простота регистрации, быстрая поддержка и удобный интерфейс делают игровой опыт комфортным. Однако важно помнить о рисках азартных игр и играть ответственно.
https://t.me/Mobile_1win/320
https://t.me/s/TeleCasino_1Win/914128
https://t.me/s/Reyting_Casino_Russia
спасибо большое если возникнут вопросы напишу
подскажи пожалуйста а как в эклипс импортировать если можно по подробнее просто неочень разбираюсь
https://t.me/TeleCasino_1Win/4
спасибо буду разбиратся
https://t.me/s/Portable_Jambo
https://t.me/s/TeleCasino_1win/4707
здравствуй спасибо за помощь разобрался но возник вод такой вопрос как подключить в эту схему радио модуль nrf 24l01
Уважаемый автор у меня вопрос по вашему уникальному труду. У вас по данной схеме управление двумя приводами,а возможно ли сделать так чтобы было восемь приводов и каждый управлялся бы отдельной командой?Если да то как?
Здравствуйте немоглибы вы выложить схему управления которое подключается к компьютеру
играть в 1win
https://t.me/vavada_win_vavada/260
Ищешь лучшие места для ставок с минимальными рисками? Мы покопались в мире азартных игр и подготовили для тебя Топ 15 надежных онлайн-казинo с минимальными ставками! Каждое из этих казинo имеет лицензию, так что можешь смело играть, не беспокоясь о безопасности.
https://t.me/s/rejting_top_luchshih_kazino/203
https://t.me/s/official_1win_site_2025
https://t.me/s/TgWin_1win/1681
Подскажи модуль сс1101 получится использовать
подскажи как запустить програму управления в jar формати онаже скомпилированая 1 раз запустил сейчас немогу
извини запустил только он в конект невыходит
https://t.me/s/TeleCasino_1win/3957
https://t.me/s/TeleCasino_1Win/3
https://t.me/s/play_1win_online
Программу запустил по модулювидно что что-то передаётся но команды не отображаются
И подскажи пожалуйста программу собрал а какой именно фаил писать в микроконтроллер
https://t.me/s/play_1win_online
подкажи частоту которую надо у микроконтролера ставить
https://t.me/s/TeleCasino_1Win/6
https://t.me/s/play_1win_online
https://taplink.cc/dostavka_promokodi
подскажи такое ощущение что с программой для микроконтролера чтото нето собираю компелирую ошибок нету зашиваю неработает беру собираю схему в протеуси записываю туда програмку на микроконтроллере мигают ena иenb ну и на com порте при нажатии на кнопки и всё больше ничего непроисходит мигают просто так с определенной частотой
Здравствуйте подскажите вы тему закрыли или как ато неодного ответа неполучил
выставил как ты написал тоже самое уже весь мозг сломал
iphone 13 max iphone photo
Find the Perfect Clock https://clocks-top.com for Any Space! Looking for high-quality clocks? At Top Clocks, we offer a wide selection, from alarm clocks to wall clocks, mantel clocks, and more. Whether you prefer modern, vintage, or smart clocks, we have the best options to enhance your home. Explore our collection and find the perfect timepiece today!
аренда машины в москве длительно прокат автомобилей в москве недорого
read comic sonic free comic reader PC
русские фильмы онлайн качество лучшие фильмы онлайн без смс
фильмы на телефон ужасы 2025 смотреть онлайн HD
перепродажа аккаунтов заработок на аккаунтах
перепродажа аккаунтов маркетплейс аккаунтов
магазин аккаунтов безопасная сделка аккаунтов
покупка аккаунтов заработок на аккаунтах
студия лазерной эпиляции процедура лазерной эпиляции
купить аккаунт с прокачкой маркетплейс аккаунтов
маркетплейс аккаунтов соцсетей продать аккаунт
печать плакатов и постеров печать больших плакатов
Marketplace for Ready-Made Accounts Database of Accounts for Sale
Accounts for Sale Online Account Store
Account marketplace Sell Account
Account Acquisition Account Trading
Gaming account marketplace Buy Account
Account Acquisition Account Store
Buy and Sell Accounts Account Buying Platform
social media account marketplace online account store
secure account sales gaming account marketplace
verified accounts for sale account selling service
ready-made accounts for sale social media account marketplace
account exchange account buying service
website for selling accounts secure account purchasing platform
открыть компанию в великобритании открыть компанию в англии
account marketplace account market
account sale accounts-buy.org
account selling service website for selling accounts
social media account marketplace accounts market
account purchase account store
find accounts for sale buy accounts
buy pre-made account secure account sales
ready-made accounts for sale ready-made accounts for sale
accounts market database of accounts for sale
курсовая дешево написать курсовую цена
account market account selling platform
social media account marketplace website for buying accounts
account market account buying platform
цена курсовая https://kursoviehelp.ru/
database of accounts for sale account acquisition
guaranteed accounts secure account purchasing platform
buy and sell accounts verified accounts for sale
buy pre-made account buy accounts
buy and sell accounts accounts market
ready-made accounts for sale https://accounts-marketplace.live/
account buying service https://social-accounts-marketplace.xyz/
buy pre-made account account marketplace
gaming account marketplace https://buy-accounts-shop.pro
account selling platform accounts market
account catalog buy accounts
ready-made accounts for sale https://buy-accounts.live
каталог смартфонов с ценами смартфон 256gb купить
account trading platform https://accounts-marketplace-best.pro
https://t.me/s/Wwwinwin1win
магазин аккаунтов https://akkaunt-magazin.online
ГГУ имени Ф.Скорины https://www.gsu.by/ крупный учебный и научно-исследовательский центр Республики Беларусь. Высшее образование в сфере гуманитарных и естественных наук на 12 факультетах по 35 специальностям первой ступени образования и 22 специальностям второй, 69 специализациям.
маркетплейс аккаунтов магазины аккаунтов
биржа аккаунтов https://kupit-akkaunt.online/
играть в казино онлайн
buy ad account facebook buy old facebook account for ads
buy facebook old accounts buy facebook accounts for ads
cheap facebook account https://buy-ad-account.top
buy facebook advertising accounts https://buy-ads-account.click
cheap facebook account https://ad-account-buy.top/
facebook ad account for sale https://buy-ads-account.work
buy facebook old accounts buy aged fb account
google ads agency account buy https://buy-ads-accounts.click
cheap facebook advertising account https://buy-accounts.click
buy adwords account https://ads-account-for-sale.top
buy google ads invoice account https://ads-account-buy.work
https://t.me/vavada_win_vavada/623
купить реферат цена сколько стоит реферат на заказ
buy aged google ads account https://buy-account-ads.work
buy google adwords accounts https://buy-ads-agency-account.top/
google ads reseller buy account google ads
verified business manager for sale https://buy-business-manager.org
buy google ad threshold account buy google adwords account
Твое. сео как продвинуть сайт самому – Да, – немного удивившись осведомленности прокуратора, продолжал Иешуа, – попросил меня высказать свой взгляд на государственную власть.
facebook bm for sale https://buy-verified-business-manager-account.org/
verified bm https://buy-verified-business-manager.org
buy facebook business managers business-manager-for-sale.org
buy business manager account buy-bm.org
verified business manager for sale unlimited bm facebook
verified bm https://buy-business-manager-accounts.org/
buy tiktok business account https://buy-tiktok-ads-account.org
tiktok agency account for sale https://tiktok-ads-account-for-sale.org
tiktok agency account for sale https://tiktok-agency-account-for-sale.org
buy tiktok ads https://buy-tiktok-ad-account.org
стоимость экскурсий в калининграде сколько стоят экскурсии в калининграде
tiktok ads agency account https://buy-tiktok-ads-accounts.org
buy tiktok business account https://buy-tiktok-ads.org
разработка сайта магазина разработка интернет магазина на laravel
бейджи под заказ изготовление металлических бейджев
https://t.me/s/Portable_Kingdom
https://t.me/s/Portable_BitRuby
продвижение сайта в поиске https://seoprocessoptimization.ru
металлические бейджи с гравировкой бейдж из латуни
https://t.me/sDragonMoney_Portable
изготовление металлических значков значки на заказ
https://t.me/s/DragonMoney_Portable
Восемь. Он застал Аркадия за письменным столом, с книгой в руках, в застегнутом доверху сюртуке. Он позвонил еще раз и еще раз и начал ворчать и тихонько ругаться.
дешевая типография печати типография спб
Хороши ваши стихи, скажите сами? — Чудовищны! — вдруг смело и откровенно произнес Иван. Граф, как в огромных тенетах, ходил в своих делах, стараясь не верить тому, что он запутался, и с каждым шагом все более и более запутываясь и чувствуя себя не в силах ни разорвать сети, опутавшие его, ни осторожно, терпеливо приняться распутывать их. Как жаль, что не исправить в нём ни единого слова, ни единого жеста.
Римский постарался изобразить на лице улыбку, от чего оно сделалось кислым и злым, и раскланялся с безмолвным магом, сидящим рядом с котом на диване. Ты же всё равно не веришь… На свежую обиду Тима наложились недоговорённости минувшего года: – Что ты мне, как придурку – говорил же, говорил же?! Я тебе кто? Друг или нет? – Чего завёлся-то? – А то! Говорил он! Только переспрашивал – ты мне веришь или нет? А сам лепил про волшебников, про чудеса! Срез времени, как же! Сейчас на Славку обижался не Тимур Ашкеров, просто себе одноклассник, а друг, который с прошлой осени ждал откровенности и не дождался. И если бы нестойкое трепетание небесного огня превратилось бы в постоянный свет, наблюдатель мог бы видеть, что лицо прокуратора с воспаленными последними бессонницами и вином глазами выражает нетерпение, что прокуратор не только глядит на две белые розы, утонувшие в красной луже, но постоянно поворачивает лицо к саду навстречу водяной пыли и песку, что он кого-то ждет, нетерпеливо ждет.
печать визиток быстро https://pechat-vizitok11.ru
Нужна https://pechat-nakleek1.ru? Закажите стикеры любых форм и размеров с доставкой. Яркие, прочные, влагостойкие наклейки на пленке и бумаге — для рекламы, декора, маркировки и упаковки.
Профессиональная адрес типографии. Изготовим любые печатные материалы — от визиток до каталогов. Качественно, быстро, с гарантией. Закажите онлайн или приезжайте в офис в СПб.
Изготовление и печать наклеек спб. Стикеры для бизнеса, сувениров, интерьера и упаковки. Печатаем тиражами от 1 штуки, любые материалы и формы. Качественно, недорого, с доставкой по СПб.
медицинский центр отзывы семейный медицинский центр
Избавьтесь от волос лазерная эпиляция волос навсегда — с помощью лазерной эпиляции. Эффективные процедуры на любом участке тела, минимальный дискомфорт, заметный результат уже после первого сеанса.
узи платно https://uzi-abakan11.ru
Славка испугался. Дешевый Нотариальный Перевод Документов – Я уверена, что мой муж будет согласен, – сказала графиня, – но ваш батюшка… – Мой отец, которому я сообщил свои планы, непременным условием согласия положил то, чтобы свадьба была не раньше года.
записаться к терапевту запись к терапевту абакан
Хромой тыкал дубинкой, не успевая поднять ту на уровень головы. Знакомства Для Секса Без Обязательств Бесплатно – Ненавистный город… – вдруг почему-то пробормотал прокуратор и передернул плечами, как будто озяб, а руки потер, как бы обмывая их, – если бы тебя зарезали перед твоим свиданием с Иудою из Кириафа, право, это было бы лучше.
Зрители за это время успели разойтись, остались Рема с Тимуром и Олен. Знакомства Для Секса Бесплатно В Ростове На Дону И еще как бывает! Рассуждение это ни в какой степени не удовлетворило председателя домоуправления.
Быстров-младший быстро оглянулся. Нотариальный Перевод Документов Чистые Пруды Национальность пришельца было бы трудно установить.
Read the latest sports news today: football, hockey, basketball, MMA, tennis and more. Insiders, forecasts, reports from the scene. Everything that is important for sports fans to know — in one place.
https://t.me/s/RatingCasinoRu
Подчертай своя стил с рокли, вдъхновени от световните модни столици
дамски рокли https://www.rokli-damski.com .
Бъди уверена и модерна с дамски комплект от нашата нова колекция
дамски сетове дамски сетове .
Тениски за дами, които обичат качеството, удобството и стила
дамски тениски големи размери teniski-damski.com .
Услуги клининга по подписке — чистота на регулярной основе
сайт клининга сайт клининга .
Магазин шин с акцентом на безопасность и качество
интернет магазин шин и дисков https://www.kupit-shiny0-spb.ru .
resume chemical engineer https://resumes-engineers.com
resume software engineer google https://resumes-engineers.com
Морская романтика и уединение: аренда яхты для пары
яхта аренда сочи https://arenda-yahty-sochi23.ru/ .
Jarvi корм с высоким содержанием белка и без ненужных добавок
корм jarvi состав https://www.ozon.ru/product/suhoy-korm-jarvi-polnoratsionnyy-dlya-vzroslyh-koshek-s-chuvstvitelnym-pishchevareniem-s-indeykoy-1-1173234324 .
Курорт Гагры — идеальное место для пляжного отдыха и восстановления
отдых в гаграх 2024 otdyh-gagry.ru .
En yeni full hd film içerikleriyle eğlencenin merkezine yolculuk
türkçe dublaj full hd film izle https://www.filmizlehd.co/ .
Кому доверить поверку — критерии выбора проверенной компании
Организация поверки средств измерений poverka-si-msk.ru .
how to ship a car vehicle shipping cost
Эффективное выведение из запоя с выездом нарколога на дом в любое время суток
заказать нарколога на дом http://www.clinic-narkolog24.ru/ .
Ваш любимый алкоголь теперь доступен с доставкой всего за несколько кликов
доставка алкоголя 24 часа москва заказать алкоголь с доставкой круглосуточно .
Профессиональное косметологическое оборудование аппараты для салонов красоты, клиник и частных мастеров. Аппараты для чистки, омоложения, лазерной эпиляции, лифтинга и ухода за кожей.
Заказать набор бокалов для вина с доставкой на дом
бокалы для вина https://bokaly-dlya-vina.neocities.org/ .
Оригинальный императорский фарфор из Санкт-Петербурга — проверенное качество
императорский фарфоровый завод каталог императорский фарфоровый завод каталог .
Экспресс-клининг квартир перед сдачей в аренду или продажей
клининговая служба kliningovaya-kompaniya10.ru .
кредит займ онлайн https://zajmy-onlajn.ru
Лизинг спецтехники и коммерческих автомобилей для строительных проектов
купить грузовик в лизинг https://lizing-auto-top1.ru/gruzovye-avtomobili/ .
Печать на футболках для спорта, отдыха, бизнеса и творчества
заказ футболки со своим принтом https://www.pechat-na-futbolkah777.ru/ .
Почему выгодно заказывать деревянные дома под ключ с полной внутренней отделкой
дом деревянный под ключ цена https://derevyannye-doma-pod-klyuch-msk0.ru .
заказ дипломной работы https://diplomsdayu.ru
кредитный микрозайм zajmy-onlajn.ru
Обработка подстолья антикоррозийными средствами — гарантия долговечности
купить подстолье https://www.podstolia-msk.ru/ .
Услуги клининга в Москве приобретают все большее значение. С учетом быстрой жизни в столице, многие москвичи стремятся облегчить свои бытовые обязанности.
Компаниям, занимающимся клинингом, доступны разнообразные виды услуг. Профессиональный клининг включает как стандартную уборку, так и глубокую очистку в зависимости от потребностей клиентов.
При выборе клининговой компании важно обратить внимание на опыт работы и отзывы клиентов. Клиенты должны понимать, что качественная уборка требует профессиональных навыков и соблюдения стандартов.
Таким образом, услуги клининга в Москве предоставляют возможность сэкономить время. Клиенты могут легко найти компанию, предоставляющую услуги клининга, для поддержания чистоты.
сервис уборки сервис уборки .
Поверка измерительного оборудования осуществляется с минимальным вмешательством в работу объекта. Обеспечиваем корректность и достоверность результата.
Поверка средств измерений — это важный процесс, который позволяет обеспечить точность измерений в различных областях. Данный процесс обеспечивает соответствие оборудования установленным нормам и стандартам качества.
Процедура поверки проходит через ряд этапов, включая проверку функционального состояния измерительных средств. На первом этапе выполняется визуальный осмотр инструментов и выявление возможных неисправностей. В случае несоответствий прибор нужно откалибровать или заменить на другой.
Регулярность поверки приборов критически важна для поддержания их точности и надежности. Также следует обращать внимание на сроки поверки, чтобы минимизировать риск получения некорректных данных.
Услуги клининга с прозрачными расценками и без скрытых платежей
клининг москва клининг москва .
Каркасный дом с террасой и мансардой: больше пространства за меньшие деньги
дома каркасные спб http://www.spb-karkasnye-doma-pod-kluch.ru/ .
Почему каркасный дом выгоден в строительстве и обслуживании
дома каркасные спб http://www.karkasnie-doma-pod-kluch06.ru .
Цветная печать на футболках: стойкие краски, точная передача деталей
заказать футболки с принтом https://www.pechat-na-futbolkah777.ru .
Посетите наш сайт и узнайте о клининг в санкт петербурге цены на услуги!
Клининговые услуги в Санкт-Петербурге востребованы как никогда. С каждым годом всё больше компаний предлагают широкий спектр услуг по уборке и обслуживанию помещений.
Пользователи услуг клининга отмечают высокое качество и удобство. Команды клининговых компаний зачастую предлагают персонализированный подход к каждому клиенту, учитывая его потребности.
Клининговые компании предлагают различные варианты услуг, от регулярной уборки до разовых). Некоторые клининговые фирмы предоставляют дополнительные услуги, например, уборку после ремонта или мероприятий.
Цена на клининговые услуги зависит от объема работы и используемых средств. Заказчики могут подобрать различные варианты услуг, чтобы найти оптимальное решение.
Реальные сроки строительства деревянного дома под ключ — от проекта до заселения
деревянные дома под ключ цены http://derevyannye-doma-pod-klyuch-msk0.ru/ .
Все услуги клининга в Москве цены указаны в открытом доступе на сайте. Мы не навязываем лишних услуг и соблюдаем договорённости.
В последние годы клининг в Москве становится все более востребованным. Все больше людей в Москве выбирают услуги профессионального клининга для уборки своих помещений.
Цены на клининг могут варьироваться в зависимости от специфики услуг. Например, стандартная уборка квартиры может стоить от 1500 до 5000 рублей.
Также можно заказать дополнительные услуги, включая мойку окон и химчистку ковров. Добавление таких услуг может существенно повысить итоговую цену клининга.
Перед выбором клининговой фирмы рекомендуется ознакомиться с различными предложениями на рынке. Важно учитывать мнения клиентов и репутацию компании.
Какой сегодня церковный праздник istoriamashin.ru .
новости дня http://pechory-online.ru/ .
Для ужина или встречи с друзьями — заказ суши сделает ваш вечер вкуснее. Красивые роллы, ароматный рис и сочная рыба.
Заказать суши довольно просто. Существует несколько способов заказа суши, включая сайт ресторана и мобильные приложения. Каждый из этих способов предлагает определенные плюсы и минусы.
Важно учитывать мнения других клиентов при выборе суши-ресторана. Почитайте, что говорят люди о качестве еды и обслуживании. Это поможет избежать разочарований и выбрать надежное заведение.
Проверьте меню заведения, прежде чем сделать заказ. Разные рестораны могут предлагать различные варианты суши и роллов. Выбор уникальных и необычных позиций может сделать ваш вечер интереснее.
При заказе обязательно уточните, когда ожидается доставка. Уточнение времени доставки поможет избежать ожидания и обеспечит комфортное времяпрепровождение. Кроме того, уточните возможность доставки в ваш район.
Любимые роллы с отличным вкусом — роллы недорого СПб на каждый день. Большой выбор и всегда свежие продукты.
В последние годы вок-заказ становится всё более востребованным методом доставки еды. Существует множество причин, почему вок-заказ стал любимым среди людей.
Вок-блюда можно заказать в больших и малых ресторанах, которые специализируются на этой кухне. Каждое заведение старается выделиться своим ассортиментом и акциями.
Рекомендуется ознакомиться с отзывами о заведениях, прежде чем делать заказ. Это позволит выбрать только те рестораны, которые предлагают отличное качество пищи.
Следите за специальными предложениями, которые могут сделать ваш заказ более выгодным. Это отличная возможность попробовать новые блюда по более низкой цене.
dragon slots casino dragon slots casino .
Con la compañía de exhibición de drones, obtienes mucho más que un show visual: creamos una experiencia envolvente que despierta admiración y conexión con el público desde el primer segundo.
La popularidad de los espectáculos de drones ha crecido exponencialmente en los últimos tiempos. Estos shows integran tecnología avanzada, creatividad y diversión. Las demostraciones de drones son frecuentemente vistas en festivales y celebraciones importantes.
Los drones iluminados crean patrones impresionantes en el cielo nocturno. Las audiencias suelen quedar asombradas por la combinación de luces y coreografías.
Varios organizadores deciden recurrir a compañías dedicadas a la producción de espectáculos de drones. Estas organizaciones poseen pilotos entrenados y tecnología avanzada.
El tema de la seguridad es vital en la planificación de estos shows. Se establecen medidas estrictas para asegurar la seguridad del público. El futuro de los espectáculos de drones es prometedor, con innovaciones constantes.
Full HD izleme deneyimi sunan platformumuzda, her türden film bulabilirsiniz. En yüksek kalite için full hd izle alanını tercih edin.
Yayın hizmetleri son birkaç yılda büyük bir popülerlik artışı yaşadı. Yüksek kaliteli içerikler, özellikle Full HD ve 4K filmler, izleyicilerin büyük ilgisini çekiyor. İnsanlar, netlik ve detaylara vurgu yapan etkileyici izleme deneyimleri arayışında.
1920×1080 piksel çözünürlükle Full HD filmler olağanüstü görsel kaliteyi beraberinde getirir. Büyük ekranlar bu çözünürlüğü gerçekten öne çıkararak detaylı bir izleme deneyimi sunar. Öte yandan, 4K filmler 3840×2160 piksel gibi daha yüksek çözünürlükle bu deneyimi geliştirir.
Bu talebi fark eden yayın hizmetleri, geniş Full HD ve 4K film koleksiyonları sağlamaya başladı. Böylece, seyirciler hem yeni yapımları hem de sevilen klasik filmleri en yüksek görsel kalitede izleyebiliyor. Bunun yanında, birçok yayın hizmeti yüksek çözünürlüklü formatlara özel orijinal içerik üretimine kaynak ayırıyor.
Kısaca, yayın platformlarında Full HD ve 4K filmlerin artması izleyici zevklerindeki değişimi ortaya koyuyor. Teknoloji ilerledikçe, görsel medyayı tüketme şeklimizde daha fazla gelişme bekleyebiliriz. Bu da şüphesiz sinema ve ev eğlencesinin geleceğini şekillendirecektir.
Требуется полная конфиденциальность? Наш анонимный наркологический стационар в Санкт-Петербурге гарантирует защиту ваших данных и деликатность.
Клиника наркологии предоставляет услуги по лечению зависимостей и реабилитации. Команда профессионалов в наркологической клинике обеспечивает индивидуальный подход к каждому пациенту.
Основной целью наркологической клиники является выявление и лечение проблем, связанных с зависимостями. Лечение осуществляется с использованием сочетания медикаментозной терапии и психологической поддержки.
Психологическая поддержка играет ключевую роль в процессе восстановления. Это помогает пациентам не только избавиться от физической зависимости, но и предотвратить рецидивы.
Процесс реабилитации может занять различное время, в зависимости от сложности случая. Несмотря на сложности, победа над зависимостью крайне ценна.
электрический карниз для штор купить karniz-motorizovannyj77.ru .
электрокарниз купить в москве электрокарниз купить в москве .
Современные тенденции и классика – в нашей подборке проектов готовых домов. Каждый проект создан для комфортной и счастливой жизни.
Проекты домов становятся все более популярными среди людей, ищущих идеальное жилье. Определение подходящего проекта дома является решающим шагом на пути к уюту и комфорту.
Разнообразие проектов домов включает в себя различные стили и типы. Каждый желающий может выбрать проект, отвечающий его личным предпочтениям.
Одним из основных факторов при выборе проекта является размер земельного участка. Не менее значимыми являются также условия окружающей среды и климат.
С использованием современных технологий возможно разработать индивидуальные проекты домов. Проекты могут модифицироваться в зависимости от предпочтений и потребностей клиентов.
Ищете качественный отдых без лишних трат? У нас вы найдете варианты для отдых в абхазии недорого.
Отдых в Абхазии — это настоящая находка для тех, кто ценит природу и атмосферу. Её живописные пейзажи, мягкий климат и теплое море привлекают туристов со всего мира.
Каждый год миллионы людей стремятся посетить Абхазию, чтобы насладиться её красотой. Отдых в Абхазии предлагает как спокойные пляжные дни, так и захватывающие приключения.
Выбор жилья в Абхазии впечатляет: от уютных гостевых домов до современных гостиниц. Кроме того, здесь можно насладиться вкусной местной кухней и разнообразием культурных мероприятий.
Независимо от времени года, отпуск в Абхазии будет незабываемым и полным позитивных эмоций. Абхазия ждёт вас с открытыми объятиями и множеством новых впечатлений.
Вас ждёт чистое море, красивые виды и приятный морской бриз — воспользуйтесь яхты сочи аренда и откройте для себя отдых в новом формате.
Аренда яхты — это увлекательный способ провести время на воде. Плавание на яхте открывает перед вами удивительные горизонты и дарит незабываемые впечатления.
Подбор яхты — ключевой момент, который стоит учитывать при планировании отдыха. Необходимо учитывать тип и размер яхты, чтобы она соответствовала вашим требованиям.
Перед подписанием контракта на прокат яхты обязательно ознакомьтесь с его условиями. Некоторые компании могут предлагать дополнительные услуги, такие как капитан или экипаж.
Наконец, не забудьте об организации маршрута. Исследуйте знаменитые пляжи и живописные ландшафты для незабываемых впечатлений.
У Степы оборвалось сердце, он пошатнулся. Как правильно перевести паспорт — Бюро нотариальных переводов Именно, что дело вчера было на Сходне, на даче у автора скетчей Хустова, куда этот Хустов и возил Степу в таксомоторе.
Качественная наркология в СПб доступна в нашей клинике. Современное оборудование, комфортабельный стационар и опытные врачи-наркологи.
Клиника наркологии предоставляет услуги по лечению зависимостей и реабилитации. Команда профессионалов в наркологической клинике обеспечивает индивидуальный подход к каждому пациенту.
Основной целью наркологической клиники является выявление и лечение проблем, связанных с зависимостями. Комплексный подход к лечению включает как медицинские, так и психологические методы.
Специалисты работают с клиентами над психологическими аспектами их зависимостей. Это помогает пациентам не только избавиться от физической зависимости, но и предотвратить рецидивы.
Каждый пациент проходит реабилитацию в своем темпе, что позволяет избежать стрессовых ситуаций. Несмотря на сложности, победа над зависимостью крайне ценна.
mostbet suallar və cavablar http://mostbet3041.ru/
От посуточной аренды комнаты до длительной аренды коттеджа – большой выбор жилья для вашего пребывания. снять жилье в архипо осиповке можно в пару кликов, изучив отзывы и фото.
Архипо-Осиповка — идеальное направление для вашего летнего отпуска. Множество отдыхающих выбирает Архипо-Осиповку, чтобы насладиться солнечными днями и красотой природы.
Пляжи этого курорта известны своим чистым песком и спокойными водами. На пляжах Архипо-Осиповки доступны различные водные виды спорта и развлекательные программы.
Разнообразие мест для проживания в Архипо-Осиповке удовлетворит любые потребности отдыхающих. Вы можете выбрать как роскошные отели, так и более бюджетные варианты, подходящие для всей семьи.
Местные развлечения порадуют как детей, так и взрослых. Прогулки по набережной, экскурсии и местные фестивали — все это создаст незабываемые впечатления.
Familiarize yourself with all the core features and strategies in how do you play sweet bonanza, helping you spin smarter and win more often.
The Sweet Bonanza slot game has gained immense popularity among online casino enthusiasts. This game features vibrant graphics and exciting gameplay, making it a favorite.
The primary attraction of Sweet Bonanza lies in its unique features. The game employs a cascading reel system, enabling players to achieve several wins with one spin.
On top of that, Sweet Bonanza provides a free spins option that enhances the overall fun. Activating this feature can result in significant winnings, adding to its allure.
Ultimately, Sweet Bonanza proves to be an engaging slot option for enthusiasts. With its vibrant design and rewarding features, it appeals to both new and experienced players.
Q
здравствуй подскажи почему я невижу ответы
йц
Экономия пространства и эффективность в одном решении. Надежные грузовые подъемники одномачтовые помогут оптимизировать внутреннюю логистику вашего предприятия.
Одномачтовый подъемник пользуется большим спросом в различных сферах. Этот вид подъемника используется для выполнения множества задач.
Они обладают высокой степенью мобильности, что делает их удобными для использования. Эти устройства легко транспортировать и устанавливать.
Во-вторых, однозначным преимуществом является их компактный размер. Благодаря этому, их можно применять в условиях ограниченной площади.
Тем не менее, у одномачтовых подъемников есть и свои минусы. Например, они могут иметь ограниченную грузоподъемность. При выборе подобного оборудования следует внимательно учитывать все его параметры.
– А не надо никаких точек зрения, – ответил странный профессор. Арбитражный суд Москвы: компетенция и рассматриваемые дела — Юрист Мария Шахрировна Машина заехала за Желдыбиным и, первым долгом, вместе со следствием, отвезла его (около полуночи это было) на квартиру убитого, где было произведено опечатание его бумаг, а затем уж все поехали в морг.
Мы собрали работы и контакты десятков специалистов. Для вашего удобства доступен раздел фотографы сайт с рейтингами, портфолио и личными профилями.
Выдающиеся фотографы занимают особое место в мире визуального искусства. В этой публикации мы обсудим ряд выдающихся фотографов, чьи снимки оставляют неизгладимое впечатление.
Начнем с личности, которая высоко ценится в мире фотографии. Этот творец делает потрясающие снимки, которые передают атмосферу и эмоции.
Следующим в нашем списке идет фотограф, чьи портреты всегда полны жизни и эмоций. Этот фотограф способен создать снимки, передающие характер и настроение модели.
Финальным героем нашей статьи станет фотограф, известный своими великолепными пейзажами. Снимки этого фотографа поражают своей яркостью и детальной проработкой.
buy a facebook ad account secure account sales account store
facebook ads account buy buy pre-made account account purchase
Access services and confirm your identity using fake phone numbers that work fast and help keep your actual phone number confidential.
Getting text messages is crucial for contemporary interactions. These messages keep us in touch with our friends, family, and workmates.
With the rise of technology, SMS has turned into a key communication tool for numerous individuals. Whether it’s for alerts or notifications, SMS fulfills numerous functions.
Nonetheless, certain individuals encounter difficulties when receiving SMS. Factors like connectivity issues, device settings, or technical malfunctions can lead to SMS delivery challenges.
Users can troubleshoot these issues by ensuring their network is active and their phone configurations are correct. Updating the device software can also help improve SMS functionality.
экспресс на футбол сегодня http://www.prognozy-na-futbol-2.ru .
В ту же ночь, вернувшись с Анфисой с дачи, на которую Анна Францевна почему-то спешно поехала, она не застала уже гражданки Беломут в квартире. Займ на карту онлайн в Вива деньги: условия и преимущества — Микрозаймы ИНФО «Немец», – подумал Берлиоз.
Степа старался что-то припомнить, но припоминалось только одно – что, кажется, вчера и неизвестно где он стоял с салфеткой в руке и пытался поцеловать какую-то даму, причем обещал ей, что на другой день, и ровно в полдень, придет к ней в гости. Стоимость нотариально заверенного перевода паспорта в Москве — Бюро переводов в Москве Последние же, Вар-равван и Га-Ноцри, схвачены местной властью и осуждены Синедрионом.
mostbet uz com https://mostbet4073.ru/
1win գրանցում 1win գրանցում
Ищешь лучшие места для ставок с минимальными рисками? Мы покопались в мире азартных игр и подготовили для тебя Топ 15 надежных онлайн-казинo с минимальными ставками! Каждое из этих казинo имеет лицензию, так что можешь смело играть, не беспокоясь о безопасности.
https://t.me/s/rejting_top_luchshih_kazino/240
ванна с массажем https://hidromassazhnaya-vanna2.ru/ .
winline акция winline акция .
Кварцвиниловый ламинат купить в Москве недорого napolnaya-probka1.ru .
Мы поддерживаем прозрачность и качество сервиса. Ознакомьтесь с подборкой знаменитые фотографы, которые регулярно участвуют в крупных проектах и выставках.
Отличные фотографы играют значительную роль в искусстве фотографии. В этой публикации мы обсудим ряд выдающихся фотографов, чьи снимки оставляют неизгладимое впечатление.
Первым стоит выделить имя, которое знакомо многим любителям искусства. Этот мастер создает удивительные образы, которые подчеркивают красоту и уникальность момента.
Еще одним замечательным представителем является фотограф, который специализируется на портретной съемке. Этот фотограф способен создать снимки, передающие характер и настроение модели.
Финальным героем нашей статьи станет фотограф, известный своими великолепными пейзажами. Снимки этого фотографа поражают своей яркостью и детальной проработкой.
Просторная палуба, морской бриз и виды на побережье — аренда яхт в сочи подарит эмоции, которые останутся с вами надолго.
Прокат яхты — замечательный способ насладиться морскими приключениями. Аренда яхт становится популярной среди туристов в теплое время года.
Арендовать яхту может быть непросто для новичков. Однако, имея определенные знания, вы сможете упростить эту задачу.
В первую очередь, стоит выбрать маршрут вашей поездки. Это поможет вам выбрать нужный размер и тип яхты.
Не упустите из виду условия договора аренды яхты. Знание условий аренды спасет вас от неожиданных затрат.
https://t.me/cVavada_vavada
Побалуйте себя морским путешествием, воспользовавшись услугой яхты аренда. Это отличная возможность отметить важное событие с размахом.
Организация аренды яхты — отличный вариант для любителей приключений на воде. Вам доступен широкий выбор: от быстродействующих яхт до роскошных судов.
Перед тем как арендовать яхту, важно изучить все варианты и предложения. Каждая компания предлагает различные условия аренды, включая цены и дополнительные услуги.
Важно убедиться в прозрачности всех условий, прежде чем подписать соглашение. Следует узнать, что входит в стоимость аренды, а что является дополнительной платой.
Сдача в аренду яхты может стать уникальным опытом и основой для незабываемых историй. Независимо от того, выбираете ли вы романтическую прогулку или веселую вечеринку, яхта станет отличной платформой.
Мы поможем вам оформить заказ футболки со своим принтом, чтобы каждый элемент соответствовал вашим ожиданиям. Яркие цвета и комфортный материал гарантированы.
Футболки с индивидуальными принтами — отличное средство самовыражения. Разнообразные методы печати делают возможным создание уникальных футболок.
Методы печати на текстиле различаются по своим характеристикам и подходам. Например, трафаретная печать известна своей долговечностью и яркостью красок. Еще одним интересным методом является цифровая печать, позволяющая создавать сложные и детализированные изображения.
Важно помнить, что выбор ткани влияет на качество печати и долговечность изделия. Некоторые ткани лучше подходят для трафаретной печати, в то время как другие — для цифровой.
Также имеет значение, сколько футболок вы планируете напечатать. Если вам нужно напечатать много футболок, лучше выбрать трафаретный метод, а цифровая печать больше подходит для небольших тиражей.
https://t.me/s/TeleCasino_1win/973
https://t.me/s/TeleCasino_1win/4097
https://t.me/s/TeleCasino_1win/5147
https://t.me/s/TeleCasino_1win/5227
https://t.me/s/Official_casino_1win_1win
Даже самые трудные загрязнения не устоят — услуги генеральной уборки квартиры подойдут для любого случая и любого интерьера.
Процесс генеральной уборки является ключевым для создания комфортной и уютной атмосферы в вашем доме. Каждый из нас время от времени сталкивается с необходимостью провести такую уборку.
Прежде всего, необходимо решить, какие комнаты требуют более тщательной уборки. Выбор помещения может зависеть от уровня загрязненности или вашей личной предрасположенности.
Не забудьте запастись всем необходимым для уборки — это поможет сэкономить время. Промышленные чистящие средства, тряпки, ведра и пылесос — всё это вам пригодится.
Важно разработать план уборки, чтобы не упустить ни одну деталь. Обратите внимание на все труднодоступные места, это поможет сделать уборку более качественной.
Это было в бою при Идиставизо, в Долине Дев. топ бесплатных сайтов знакомств без регистрации Прокуратор тихо сказал человеку несколько слов, после чего тот удалился, а Пилат через колоннаду прошел в сад.
When storytelling takes to the skies, a well-executed drone show can express themes, celebrate milestones, and engage spectators in bold new ways.
The concept of a drone light show represents a cutting-edge form of entertainment. These aerial displays combine technology and artistry to create stunning visuals in the night sky.
A major advantage of these shows lies in their ability to adapt to various themes and events. From celebrating holidays to marking special occasions, there seems to be no limit to their applications.
The ecological footprint of these aerial displays is another critical consideration. By using drones, organizers significantly reduce the environmental damage typically associated with fireworks.
As technology continues to evolve, the future of drone light shows looks promising. We can expect to see even more intricate designs and synchronized performances in upcoming years.
Confia en una compania de espectaculos de drones para sorprender a tu audiencia con una propuesta audiovisual sin precedentes y una ejecucion impecable.
La utilizacion de drones en espectaculos ha aumentado significativamente en la ultima decada. Estas exhibiciones ofrecen una experiencia visual unica que atrae a miles de espectadores.
Los drones son capaces de realizar coreografias complejas en el cielo. La tecnologia avanzada que incorporan, junto con su programacion, les permite ofrecer actuaciones asombrosas.
Un aspecto clave en estos shows es la coordinacion impecable entre los diferentes drones. Cuando estos dispositivos brillan y se mueven en perfecta armonia, generan un espectaculo que asombra al publico.
La evolucion constante en la industria de drones augura un futuro emocionante para los espectaculos de luces y acrobacias. Proximamente, podriamos ver shows aun mas elaborados y creativos que desafian los limites de la imaginacion.
1вин 1вин
водопонижение строительное vodoponizhenie-msk.ru .
холодильная камера цены http://xn—-7sbabtdykncetibz6f4f8b.xn--p1ai .
купить 1с онлайн kupit-1s21.ru .
Парфюм, в основе которого лежит сандал, отличается ярким и насыщенным запахом. Сандал мгновенно переносит нас в мир восточных базаров.
Существует множество вариаций парфюмов, использующих сандал. Некоторые парфюмы акцентируют внимание на сладости, а другие — на древесности.
Этот компонент часто используется как основа для создания гардений и цветочных ароматов. Многие предпочитают ароматы с сандалом для романтических встреч или вечерних мероприятий.
Кроме того, сандал известен своими целебными свойствами и может успокаивать. Такой аромат станет чудесным презентом для близкого человека.
парфюм сандал https://www.sandalparfums.ru/
melbet полная версия https://melbet1035.ru/
перевозка автомобилей автовозом по россии https://avtovoz-av8.ru/ .
https://t.me/s/TeleCasino_1Win/6
https://t.me/s/TeleCasino_1Win/3
slot giri? https://candy-casino-2.com/ .
как часто винлайн дает фрибет как часто винлайн дает фрибет .
как получить бонус от винлайн http://winlayne-fribet.ru/ .
Illuminate the sky with coordinated light drones, each equipped with powerful LEDs that synchronize to music, forming animated patterns your audience will never forget.
Drone light shows offer a modern approach to captivating audiences. They utilize hundreds of drones to form mesmerizing patterns and shapes overhead.
A major advantage of these shows lies in their ability to adapt to various themes and events. These performances can be tailored for numerous events, ranging from festivals to corporate gatherings.
Another important aspect is the environmental impact of drone light shows. Drones do not produce harmful emissions like fireworks do, making them a greener alternative.
The future of aerial entertainment is bright, thanks to advancements in drone technology. We can expect to see even more intricate designs and synchronized performances in upcoming years.
игровые пк игровые пк .
ролет штора https://www.rulonnye-shtory-s-elektroprivodom90.ru .
электрокарнизы цена http://www.elektrokarniz150.ru .
электрокарнизы для штор цена http://elektrokarnizy150.ru .
1win ro‘yxatdan o‘tish orqali bonus https://1win3065.ru/
рулонные шторы виды механизмов https://www.rulonnye-shtory-s-elektroprivodom190.ru .
дизайнерские горшки для цветов дизайнерские горшки для цветов .
цветочные горшки дизайнерские купить цветочные горшки дизайнерские купить .
1 цшт 1win40009.ru
1win net http://1win40005.ru
https://t.me/s/Webs_1WIN/1119
1win ios 1win ios
проект перепланировки квартиры для согласования цена http://www.proekt-pereplanirovki-kvartiry4.ru .
электрокарнизы для штор купить в москве http://www.elektrokarniz11.ru .
электрокарнизы электрокарнизы .
электрокарниз электрокарниз .
оригинальные кашпо горшки для цветов http://dizaynerskie-kashpo-nsk.ru .
1win.co 1win.co
mostbet скачат https://www.mostbet11062.ru
mostbet бетгеймс https://www.mostbet11065.ru
напольный горшок с автополивом напольный горшок с автополивом .
букмекерская. контора. мостбет. http://www.mostbet11065.ru
мостбет.сом https://mostbet11062.ru
sport bets sportbets30.ru .
интересные кашпо для цветов интересные кашпо для цветов .
sports bet http://www.sportbets32.ru/ .
sportandbets sportbets31.ru .
https://t.me/s/onewin_kanal/11495
качественные прогнозы на футбол качественные прогнозы на футбол .
Строительный сайт https://vitamax.dp.ua с полезными материалами о ремонте, дизайне и современных технологиях. Обзоры стройматериалов, инструкции по монтажу, проекты домов и советы экспертов.
мостбет вход в личный кабинет http://mostbet11072.ru/
бк мост бет бк мост бет
спорт футбол прогнозы на матч https://www.kompyuternye-prognozy-na-futbol13.ru .
купить ванну с гидромассажем https://vanna-s-gidromassazhem.ru .
https://t.me/s/TgWin_1win
горшки с автополивом для комнатных растений купить https://kashpo-s-avtopolivom-spb.ru .
Get yours free temporary phone number and protect your personal information!
A temporary phone serves as an important resource for multiple scenarios. It offers flexibility and security, making it ideal for travelers.
If protecting your personal information is a priority, a temporary phone is effective. This option lets you interact without disclosing your personal contact details.
In addition, these phones tend to be budget-friendly. They typically come with prepaid plans, reducing unnecessary expenses.
Finally, the process of activating a temporary phone is quick and straightforward. Find one online or at nearby retailers with minimal hassle.
прогноз ставок на хоккей прогноз ставок на хоккей .
прогнозы на хоккей на сегодня прогнозы на хоккей на сегодня .
Create a unique design for your project with online stamp creator!
Creating stamps online has become an essential service for many artisans and businesses. In response to technological advancements, the stamp production field has transformed to accommodate today’s requirements.
A multitude of online platforms supply accessible tools for designing bespoke stamps. Such features enable users to pick shapes, sizes, and styles based on their individual tastes.
Once the design is complete, users can easily place orders through these platforms. Typically, production times are quick, ensuring that customers receive their stamps without long waiting periods.
Moreover, online stamp-making offers a wide range of materials and methods to choose from. Clients may opt for rubber, wood, or digital alternatives to fulfill their stamping requirements.
купить экран для проектора — это отличный способ улучшить качество ваших презентаций и киносеансов.
Экран для проектора играет значительную роль в обеспечении яркости и четкости изображения. Корректный выбор экрана способен существенно повысить качество восприятия контента.
Существует множество видов экранов для проекторов, и каждый из них обладает уникальными характеристиками. Наиболее распространенными являются стационарные, мобильные и натяжные экраны.
Натяжные экраны идеально подходят для домашних кинотеатров. Они обеспечивают гладкую поверхность для изображения и легко монтируются.
Мобильные экраны удобны для презентаций и выездных мероприятий. Эти экраны легко переносить и устанавливать практически в любых условиях.
моствет https://www.mostbet4149.ru
кашпо для цветов с автополивом кашпо для цветов с автополивом .
Запишитесь на фотограф профессиональный и создайте незабываемые воспоминания!
Организация фотосессии позволяет сохранить воспоминания о значимых событиях. Профессиональная фотосессия становится все более популярной, так как позволяет создать красивые и выразительные фотографии.
Важно заранее продумать концепцию фотосессии. Место для фотосессии может значительно повлиять на итоговые фотографии.
Подбор одежды для фотосессии — это важный шаг, который не следует игнорировать. Одежда должна сочетаться с концепцией и местом проведения съемки.
После завершения фотосессии следует уделить время обработке снимков. Не стоит забывать, что качественная обработка важна для получения великолепных результатов.
прибор узи https://www.kupit-uzi-apparat28.ru .
Discover the perfect balance of comfort and support with asics gel kayano, which is perfect for runners at any distance.
Many runners favor the Asics Gel Kayano due to its exceptional comfort and support. This shoe is designed with advanced technology to enhance performance. One of the standout features of the Gel Kayano is its cushioning system. With this technology, runners can enjoy both impact absorption and a smooth ride.
The stability offered by the Gel Kayano is particularly impressive. Preventing overpronation, this feature makes it suitable for various runners. Runners who require additional arch support will find this shoe particularly beneficial. Ultimately, the Gel Kayano integrates comfort, support, and performance effectively.
Another reason for its popularity is the shoe’s durability. Made with high-quality materials, the Gel Kayano can withstand the rigors of training. Runners can depend on this model for long-term wear. With both durability and comfort, this shoe represents a sound investment.
Before purchasing the Asics Gel Kayano, testing them in-store is crucial. It’s essential to achieve the right fit because foot shapes differ from one person to another. A specialty running store can offer valuable advice. Ultimately, the Asics Gel Kayano could be the perfect shoe for your running needs.
Если вы ищете хороший клининг в москве|клининговые компании рейтинг|клининг в москве рейтинг|лучшие клининговые компании москвы|рейтинг клининговых компаний|лучшие клининговые компании|клининговые компании в москве по уборке квартир рейтинг лучших|клининг рейтинг|топ клининговых компаний москвы|лучший клининг в москве по отзывам|клининговое агентство москва|клининговые компании москвы рейтинг|хороший клининг|топ клининговых компаний в москве|топ клининговых компаний|крупные клининговые компании|клининговые компании москвы список|клининг рейтинг компаний|клининг лучший в москве, обратите внимание на отзывы клиентов и рейтинг профессионализма.
В Москве существует множество клининговых компаний, готовых предоставить свои услуги . Компании предлагают различные виды уборки, в зависимости от потребностей клиентов .
Качественная уборка предполагает применение специализированных средств и технологий . Профессиональные клинеры знают, как обращаться с деликатными поверхностями и материалами .
Выбирая клининг, стоит обратить внимание на отзывы и репутацию компании . Наличие четкой информации помогает лучше понять, что именно предлагает компания.
Обязательно спросите о том, что именно будет сделано в процессе уборки . В результате профессиональной уборки вы получите не только чистоту, но и уют в вашем пространстве.
узи сканер цена узи сканер цена .
mostbet букмекерская контора сайт http://mostbet4117.ru
sport bets http://www.sportbets31.ru .
мост бет https://mostbet4117.ru/
Экран для проектора|Экран для проектора купить|Купить экран для проектора|Проекционный экран|Экран проектора|Экраны для проекторов|Экран для проектора цена|Экраны для проекторов купить|Проекционные экраны|Экран проекционный|Проекционный экран для проектора|Проекционный экран купить|Экран проекционный купить|Экран для видеопроектора|Проекционный экран цена|Купить проекционный экран|Экраны для проектора|Экран проектора купить|Экран для видеопроектора купить|Экраны для проекторов цена идеально подойдет для вашего домашнего кинотеатра!
Экран проектора играет ключевую роль в успешной презентации. Правильный выбор экрана может создать комфортные условия для восприятия.
Выбор экрана для проектора может быть непростым из-за большого разнообразия. Некоторые экраны отлично подойдут для использования в домашних условиях, в то время как другие — для профессиональных встреч.
Размер и формат экрана — это важные аспекты, на которые следует обратить внимание. Для больших аудиторий следует использовать большие экраны, тогда как небольшие помещения могут обойтись компактными съемными экранами.
Не забывайте, что качество материала экрана также имеет значение. Высококачественные экраны обеспечивают лучшую цветопередачу и контрастность.
https://t.me/s/play_1win_online
Get your temp text number? to register without any hassle!
The Concept of Temp Numbers Explained. A practical approach to enhance privacy involves utilizing temp numbers.
By using temporary numbers, individuals can communicate without disclosing their real contact information . Such numbers can be produced for brief intervals or particular functions.
A frequent application of temporary numbers is during online sign-ups. This method can significantly reduce unsolicited calls and messages .
It’s vital to opt for a dependable service when acquiring temp numbers. Numerous providers offer temp numbers on a free or affordable basis for various needs.
Ultimately, temp numbers are an effective means to safeguard privacy in the modern digital environment. By understanding their benefits and applications, users can make informed decisions .
строительство домов в иркутской области https://stroitelstvo-domov-irkutsk-1.ru .
построить дом под ключ http://www.stroitelstvo-domov-irkutsk-2.ru .
Планируйте незабываемый отпуск в отдых в архипо осиповке 2025 цены и насладитесь прекрасными пляжами и комфортным проживанием!
В 2025 году Архипо-Осиповка предложит множество возможностей для отдыха. Променад и уютные пляжи Архипо-Осиповки привлекают туристов со всей страны. Множество развлекательных мероприятий удовлетворят любые вкусы, будь то активный отдых или расслабляющий.
Кроме пляжного отдыха, в Архипо-Осиповке предлагаются различные экскурсии. Вы сможете посетить живописные места и насладиться красотой природы. Вы узнаете много нового о местности и её культуре в ходе увлекательных экскурсий.
Архипо-Осиповка предлагает разнообразные виды активного отдыха на любой вкус. Вы сможете попробовать свои силы в различных водных активностях, от катания на банане до серфинга. Это отличная возможность для тех, кто хочет насладиться адреналином.
В заключение, можно с уверенностью сказать, что отдых в Архипо-Осиповке в 2025 году оставит только положительные эмоции. Отели и рестораны обеспечат вам высокий уровень сервиса и приятную атмосферу. Не упустите возможность провести свой отпуск в таком живописном уголке нашей страны.
mostbet az giriş bloku https://mostbet4133.ru/
уличные горшки http://www.ulichnye-kashpo-kazan.ru .
новости тенниса новости тенниса .
мостбет приложение узбекистан http://mostbet4163.ru
мостбет узбекистон mostbet4163.ru
строительство дома http://www.stroitelstvo-domov-irkutsk-1.ru .
мостбек мостбек
mostbet ro’yxatdan o’tish http://mostbet4163.ru
Создайте свой идеальный каркасный дом|каркасные дома спб|каркасный дом под ключ|каркасный дом спб|каркасный дом под ключ спб|строительство каркасных домов спб|дома каркасные спб|дома каркасные|каркасный дом цена|каркасный дом под ключ в спб|каркасные дома под ключ проекты и цены|строительство каркасных домов в спб|каркасные дома в спб|каркасный дом в спб|строительство каркасных домов в санкт-петербурге|каркасные дома санкт петербург|каркасный дом санкт петербург|строительство каркасных домов в санкт петербурге|строительство каркасных домов под ключ|каркасные дома спб под ключ|каркасные дома под ключ в спб цены|дом каркасный под ключ|каркасные дома цены|каркасный дом под ключ в спб цена и наслаждайтесь комфортом и качеством!
Важно учитывать ряд факторов при выборе каркасного дома.
Получите вануату гражданство стоимость для россиян и откройте новые горизонты для вашего будущего.
Гражданство Вануату — это уникальная возможность для иностранцев, желающих получить второе гражданство. Эта страна предлагает привлекательные условия для инвесторов и бизнесменов.
Для получения гражданства необходимо выполнить ряд требований, включая инвестиции в экономику страны. Программы получения гражданства предлагают гибкие решения для разных категорий инвесторов.
Эта страна известна своей природной красотой и комфортными условиями для жизни. Получение гражданства открывает новые горизонты для ведения бизнеса и жизни на островах.
Наконец, получение гражданства Вануату также подразумевает доступ к международным поездкам без визы. Все больше людей выбирают гражданство Вануату из-за его преимуществ и простоты получения.
спортивные прогнозы на спорт https://www.prognozy-na-sport-7.ru .
блочная трансформаторная подстанция transformatornye-podstancii-kupit.ru .
ставки на хоккей прогнозы ставки на хоккей прогнозы .
горшок высокий для цветов купить напольные горшок высокий для цветов купить напольные .
Первое, что стоит учитывать при выборе проекта — это его соответствие вашим потребностям.
проект каркасного дома купить проект каркасного дома купить.
Коммерческий автотранспорт в лизинг — это выгодное решение для компаний, стремящихся расти в конкурентной среде.
коммерческие автомобили в лизинг https://lizing-kommercheskogo-avto0.ru/
Погрузитесь в невероятные морские приключения с арендой яхты в Сочи|аренда яхт|аренда яхт сочи|аренда яхты сочи|яхты сочи|аренда яхты в сочи|аренда яхт в сочи|яхта в сочи|яхты аренда|яхты в сочи|прокат яхт сочи|прокат яхты сочи|сочи яхта|сочи яхты|яхта сочи аренда|яхты сочи аренда|снять яхту сочи|арендовать яхту в сочи|сочи аренда яхт|снять яхту в сочи|сочи аренда яхты|яхты в сочи аренда|яхта аренда сочи|яхта в сочи аренда|яхта аренда в сочи!
Убедитесь в репутации компании. Также полезно будет связаться с предыдущими арендаторами. Постарайтесь выяснить, как прошла их аренда
швейное производство на заказ https://nitkapro.ru/ .
seo аудит веб сайта [url=www.poiskovoe-prodvizhenie-sajta-v-internete-moskva.ru]www.poiskovoe-prodvizhenie-sajta-v-internete-moskva.ru[/url] .
интернет агентство продвижение сайтов сео https://internet-agentstvo-prodvizhenie-sajtov-seo.ru .
mostbet oficial mostbet oficial
SEO курсы|Курсы сео|Курсы SEO|Подсказка оптимизатор про Павел|Обучение SEO специалист|SEO специалист курсы|SEO продвижение курсы|SEO специалист обучение|SEO курсы онлайн|Обучение SEO|Онлайн курсы SEO|SEO обучение|SEO оптимизация обучение|Обучение SEO с нуля|Курс SEO|Курс SEO специалист|SEO курс|Продвижение сайтов обучение|Обучение продвижение сайтов|Обучение сео продвижению|Курсы SEO продвижение|Курсы сео продвижение|Сео продвижение курсы|SEO продвижение курс|SEO школа|Курсы SEO специалист|Курсы по продвижению|Курсы по SEO продвижению|Продвижение сайта обучение|SEO продвижение обучение|Обучение SEO продвижению|Обучение по продвижению сайтов|SEO курсы Москва|Раскрутка сайта обучение|Сео обучение|SEO специалист обучение с нуля|Курс по продвижению|SEO продвижение сайта обучение|Обучение SEO|SEO оптимизация курсы|Обучение продвижению сайтов|Курсы SEO продвижения|Курсы SEO Москва|SEO обучение курсы|Сео продвижение обучение|Курсы продвижения сайтов|Курсы сео онлайн|Продвижение обучение|Курсы по SEO|Обучение продвижению сайтов с нуля|Курсы SEO с нуля помогут вам освоить ключевые навыки для эффективного продвижения сайтов в интернете.
Обучение SEO становятся все более популярными в последние годы. С каждым днем начинают осознавать важность оптимизации сайтов для успешного продвижения в интернете. Программы обучения предлагают несколько уровней подготовки, начиная от начального до углубленного уровня.
Первое, что стоит отметить, это разнообразие программ обучения. Каждая программа охватывает важные аспекты SEO, включая создание ссылок . Учащиеся могут найти множество дополнительных программ, посвященные инструментам продвижения.
Кроме того, преподаватели на этих курсах — это опытные профессионалы . Они делятся своими знаниями на основе реальных примеров и кейсов. Подобный подход помогает усвоить материал быстрее и эффективнее.
Наконец, после прохождения программы студенты получают свидетельство, подтверждающее их знания в области SEO. Это станет отличным дополнением к резюме . Многие компании предпочитают нанимать специалистов, которые прошли курсы по SEO , так как это подтверждает их квалификацию и знания.
глубокий комлексный аудит сайта poiskovoe-prodvizhenie-sajta-v-internete-moskva.ru .
поисковое seo в москве http://www.internet-agentstvo-prodvizhenie-sajtov-seo.ru/ .
Откройте для себя незабываемые морские прогулки сочи|прогулка на яхте сочи|морская прогулка сочи|прогулки на яхте сочи|прогулки на катере сочи|прогулка на катере сочи|морские прогулки в сочи|сочи прогулка на яхте|яхта сочи прогулка|яхты сочи прогулки|катание на яхте сочи|прогулки по морю сочи|сочи морские прогулки|покататься на яхте в сочи|морские прогулки сочи цены|сочи прогулка на яхте цена|прогулка на яхте в сочи цена|прогулка на яхте в сочи|сочи яхта прогулка|сочи морская прогулка|сочи катание на яхте|морская прогулка в сочи|прогулки на катере в сочи и проведите время на свежем воздухе, наслаждаясь красотой Черного моря!
Если вы ищете новые эмоции, морские прогулки в Сочи — идеальный вариант . Здесь вы сможете насладиться красотой Черного моря и потрясающими пейзажами .
Любители природы оценят красоту местных берегов и открывающиеся виды. Солнце, ветер и шум прибоя создают атмосферу, которую не передать словами .
Вы можете арендовать катер для более активного отдыха на воде . Существует множество вариантов катеров и яхт на любой вкус .
Не забудьте взять с собой камеру, чтобы запечатлеть все яркие моменты . Не упустите возможность отведать местные блюда, наслаждаясь прекрасным видом.
горшки для цветов большие напольные пластиковые купить горшки для цветов большие напольные пластиковые купить .
Готовые решения для строительства домов становятся все более популярными среди современных застройщиков. Данная тенденция вызвана комфортом таких предложений. Доступ к актуальным данным и инновационным методам сделали проектирование доступным для каждого.
Первый аспект, который стоит рассмотреть, — это широкий спектр вариантов домов. Вы можете выбрать как небольшие, так и просторные модели . Это позволит каждому найти идеальное решение, которое соответствует его желанию .
Второй важный момент — это стандартные и индивидуальные проекты . При наличии базовых требований можно использовать готовые проекты . Стандартные варианты обычно экономят средства.
Третий аспект — временные и финансовые рамки. Использование готовых решений значительно ускоряет процесс строительства . Кроме того, это позволяет контролировать бюджет .
проект дома готовый проект дома готовый.
seo partners https://internet-agentstvo-prodvizhenie-sajtov-seo.ru/ .
продвижения сайта в google продвижения сайта в google .
Для того, чтобы занять лидирующие позиции в поисковых системах, необходимо пройти [url=https://seoflagman.pro]seo курсы|курсы сео|курсы seo|подсказка оптимизатор про павел|обучение seo специалист|seo специалист курсы|seo продвижение курсы|seo специалист обучение|seo курсы онлайн|обучение seo|онлайн курсы seo|seo обучение|seo оптимизация обучение|обучение seo с нуля|курс seo|курс seo специалист|seo курс|продвижение сайтов обучение|обучение продвижение сайтов|обучение сео продвижению|курсы seo продвижение|курсы сео продвижение|сео продвижение курсы|seo продвижение курс|seo школа|курсы seo специалист|курсы по продвижению|курсы по seo продвижению|продвижение сайта обучение|seo продвижение обучение|обучение seo продвижению|обучение по продвижению сайтов|seo курсы москва|раскрутка сайта обучение|сео обучение|seo специалист обучение с нуля|курс по продвижению|seo продвижение сайта обучение|обучение сео|seo оптимизация курсы|обучение продвижению сайтов|курсы seo продвижения|курсы seo москва|seo обучение курсы|сео продвижение обучение|курсы продвижения сайтов|курсы сео онлайн|продвижение обучение|курсы по сео|обучение продвижению сайтов с нуля|курсы seo с нуля[/url], которые помогут вам получить необходимые знания и навыки для эффективного продвижения вашего сайта.
процесс, который включает в себя изучение различных стратегий и тактик для достижения успеха в поисковых системах. Это область, которая требует глубокого понимания алгоритмов поисковых систем для поддержания конкурентоспособности. Обучение SEO — это необходимый шаг для любого бизнеса или веб-сайта, который хочет увеличить свою онлайн-видимость и привлечь больше посетителей.
Обучение SEO включает в себя изучение алгоритмов поисковых систем и их работы для улучшения позиций веб-сайта в поисковых системах. Это процесс, который требует глубокого понимания поисковых систем и их алгоритмов . Обучение SEO также включает в себя анализ конкурентов и рынка для разработки эффективной стратегии.
Основы SEO
Обучение SEO начинается с изучения основ поисковых систем и их работы . Это процесс, который требует глубокого понимания ключевых слов и их роли в SEO . Обучение SEO также включает в себя изучение факторов, влияющих на позиции веб-сайта, таких как качество контента и скорость загрузки страниц .
Обучение SEO требует глубокого понимания поисковых систем и их алгоритмов . Это процесс, который включает в себя анализ конкурентов и рынка . Обучение SEO также включает в себя изучение различных аспектов онлайн-маркетинга и их влияния на SEO.
Продвинутые техники SEO
Обучение SEO включает в себя изучение продвинутых техник и стратегий . Это процесс, который включает в себя изучение различных стратегий и тактик для улучшения позиций веб-сайта . Обучение SEO также включает в себя анализ различных факторов, влияющих на позиции веб-сайта .
Обучение SEO требует глубокого понимания поисковых систем и их алгоритмов . Это процесс, который требует изучения различных инструментов и методов для анализа конкурентов и рынка . Обучение SEO также включает в себя изучение различных аспектов онлайн-маркетинга и их влияния на SEO .
Практическое применение SEO
Обучение SEO включает в себя изучение различных стратегий и тактик для улучшения позиций веб-сайта . Это процесс, который требует глубокого понимания поисковых систем и их алгоритмов . Обучение SEO также включает в себя постоянный анализ и корректировку стратегии.
Обучение SEO требует глубокого понимания поисковых систем и их алгоритмов . Это процесс, который включает в себя изучение различных аспектов технического SEO, таких как структура сайта и оптимизация изображений. Обучение SEO также включает в себя изучение различных аспектов онлайн-маркетинга и их влияния на SEO.
Create your perfect online print in just a few clicks with [url=https://mystampready-constructor0.com/]rubber stamp maker online, stamp making online, rubber stamp online maker, stamp maker, online stamp maker, stamp maker online, stamp creator online, make a stamp online, make stamp online, online stamp design maker, make stamps online, stamps maker, online stamp creator, stamp online maker, stamp online maker free, stamp maker online free, create stamp online free, stamp creator online free, online stamp maker free, free online stamp maker, free stamp maker online, make stamp online free[/url] — fast, easy and free!
With these online tools, you can effortlessly design and order your own unique rubber stamps.
Benefits of Using an Online Rubber Stamp Maker
Many platforms offer quick turnaround times and affordable prices, making it a cost-effective solution.
Steps to Create a Rubber Stamp Online
Start by either selecting a template or uploading your own design, bearing in mind image resolution for clarity.
Choosing the Right Rubber Stamp Maker
Read reviews and compare features across multiple platforms before making a final decision.
На сайте [url=https://make-stamp-1online.com/]rubber stamp maker online|stamp making online|rubber stamp online maker|stamp maker|online stamp maker|stamp maker online|stamp creator online|make a stamp online|make stamp online|online stamp design maker|make stamps online|stamps maker|online stamp creator|stamp online maker|stamp online maker free|stamp maker online free|create stamp online free|stamp creator online free|online stamp maker free|free online stamp maker|free stamp maker online|make stamp online free[/url] you can create and order the stamps you need quickly and efficiently.
that enables the design and production of personalized stamps quickly . With this innovative technology, individuals can make personalized stamps that reflect their brand or personality. The process involves selecting a template, adding text or images, and choosing the stamp size and material .
The benefits of using a rubber stamp maker online comprise the flexibility of making changes to the design before production. Additionally, the tool allows for the creation of custom stamps in various shapes and sizes. This makes it a great option for those who want to add a personal touch to their documents .
Features of Rubber Stamp Maker Online
The rubber stamp maker online offers a variety of features that make it stand out from traditional stamp-making methods . One of the key features is the option to choose from a wide range of fonts and colors . This enables businesses to incorporate their brand identity into the stamps .
Another feature is the ability to choose the ink color and type. This makes it possible for individuals to experiment with different materials and designs. Furthermore, the tool includes a saving feature that enables users to come back to their design later.
Benefits of Using Rubber Stamp Maker Online
Using a rubber stamp maker online provides several advantages, such as cost-effectiveness and efficiency . One of the main benefits is the option to design and order stamps at any time . This saves time and effort .
Another benefit is the wide range of design options and templates available . This makes it possible for individuals to add a touch of creativity to their stamps. Additionally, the online platform provides a cost-effective solution for creating custom stamps .
Conclusion and Future of Rubber Stamp Maker Online
In conclusion, the rubber stamp maker online is a revolutionary tool that provides a convenient and efficient way to make personalized stamps . The future of rubber stamp maker online is anticipated to be exciting, with the development of new features and tools. As the technology behind online stamp-making continues to evolve, the rubber stamp maker online will remain a popular choice for those seeking a convenient and efficient way to make personalized stamps.
The potential applications range from business and marketing to art and crafts . As the design options and features become more advanced , the rubber stamp maker online will remain at the forefront of the custom stamp-making industry. Whether an artist looking to explore new creative possibilities, the rubber stamp maker online is definitely worth considering .
Если вы хотите найти подходящий вариант для своей машины и при этом сэкономить, тогда стоит [url=https://kupit-shini-v-spb.ru/]зимние шины купить|зимние шины спб|купить зимние шины спб|зимние шины в спб|купить зимние шины в спб|зимняя резина спб купить|зимняя резина в спб купить|купить шины зима|зимние колёса купить|петербург зимние шины|шины зимние в петербурге|шины зимние в санкт петербурге|купить зимние шины недорого|купить недорогие зимние шины|зимняя резина дешево|купить дешево зимнюю резину|купить автошины зимние|шины зимние со склада|купить зимнюю резину в спб недорого|комплект зимней резины купить|продажа зимних шин в спб[/url], поскольку это позволит вам выбрать лучшее качество по оптимальной цене.
Зимние шины необходимы для безопасного вождения в снежных и ледяных условиях . При правильном выборе зимних шин можно значительно снизить риск аварий и улучшить сцепление с дорогой Зимние шины обеспечивают лучшее сцепление с дорогой и могут спасти вас от аварий . Кроме того, зимние шины могут улучшить управляемость транспортного средства и снизить риск заноса Зимние шины являются необходимыми для безопасного и комфортного вождения на зимних дорогах.
Зимние шины также могут снизить риск повреждения транспортного средства и других объектов на дороге Зимние шины могут снизить риск повреждения транспортного средства и других объектов на дороге . При выборе зимних шин необходимо учитывать такие факторы, как глубина протектора, тип протектора иMaterial изготовления шин Зимние шины должны иметь специальную конструкцию, которая обеспечивает лучшую стабильность и управляемость на зимних дорогах.
Типы зимних шин
Существует несколько типов зимних шин, каждый из которых имеет свои преимущества и недостатки Существует несколько видов зимних шин, каждый из которых предназначен для конкретных условий вождения . Например, стudded шины имеют металлические шипы, которые обеспечивают лучшее сцепление с дорогой на льду Studded шины имеют специальную конструкцию, которая обеспечивает лучшее сцепление с дорогой в холодных условиях . Однако, такие шины могут быть запрещены в некоторых регионах из-за повреждения дорожного покрытия Studded шины могут быть ограничены в использовании в некоторых??х .
Другой тип зимних шин — studless шины, которые не имеют металлических шипов Studless шины не имеют металлических шипов и обеспечивают лучшее сцепление с дорогой на снегу и льду . Такие шины более тихие и комфортные, чем studded шины, но могут быть менее эффективными на льду Studless шины более тихие и комфортные, чем studded шины, но могут быть менее эффективными на льду .
Как выбрать зимние шины
При выборе зимних шин необходимо учитывать несколько факторов, включая тип транспортного средства, условия вождения и личные предпочтения При выборе зимних шин необходимо учитывать тип транспортного средства, условия вождения и личные предпочтения . Например, если вы живете в регионе с сильными снегопадами, вам может потребоваться более агрессивный тип шин Если вы живете в регионе с сильными снегопадами, вам может потребоваться более глубокий протектор .
Кроме того, необходимо учитывать размер шин и тип шин, которые подходят вашему транспортному средству Необходимо учитывать такие факторы, как размер шин, тип шин и производитель . Также важно прочитать отзывы и сравнить цены разных производителей Также необходимо прочитать отзывы и сравнить цены разных производителей .
Где купить зимние шины
Зимние шины можно купить в различных магазинах и интернет-магазинах Зимние шины можно купить в различных магазинах и интернет-магазинах . Например, можно посетить магазины, такие как ОЗОН, Wildberries или Авторусь Можно посетить интернет-магазины, такие как Яндекс.Маркет или Google Маркет . Также можно проверить официальные сайты производителей, такие как Michelin, Continental или Nokian Также можно проверить сайты онлайн-магазинов, такие как Amazon или eBay.
При покупке зимних шин необходимо проверить качество и соответствие шин вашему транспортному средству При покупке зимних шин необходимо проверить цены и качество шин. Кроме того, необходимо учитывать такие факторы, как доставка и установка шин Необходимо учитывать такие факторы, как доставка и установка шин .
глубокий комлексный аудит сайта [url=www.poiskovoe-prodvizhenie-sajta-v-internete-moskva.ru]www.poiskovoe-prodvizhenie-sajta-v-internete-moskva.ru[/url] .
Для обеспечения безопасности во время зимней езды многие автомобилисты предпочитают использовать нешипованные зимние шины|зимние нешипованные шины|купить зимние нешипованные шины|шины липучки зимние купить в спб|шины липучки зимние купить|купить зимние липучки|зимняя резина липучка купить|колеса зимние липучка купить|нешипованная зимняя резина|купить нешипованную зимнюю резину|недорогая нешипованная зимняя резина|зимние шины без шипов купить|купить зимнюю резину без шипов|шины липучка купить в спб|шины липучка купить|шины зима липучка купить|резина липучка купить в спб|резина липучка купить|колеса липучка купить|зима липучка купить|покрышки липучки купить|зимние нешипуемые шины, которые обеспечивают оптимальное сцепление на льду и снегу без необходимости шипов.
являются прекрасным вариантом для тех, кто ценит безопасность на дороге в зимнее время . Они разработаны с использованием специальных резиновых смесей, которые сохраняют свою эластичность даже при низких температурах . Эти шины отличаются от шипованных шин отсутствием металлических шипов, что делает их более приемлемыми для эксплуатации на городских дорогах .
Нешипованные зимние шины пользуются большим спросом среди автомобилистов, которые ищут альтернативу традиционным шипованным шинам. Они характеризуются повышенной износостойкостью и долговечностью, что делает их экономически выгодным вариантом для многих водителей .
Преимущества нешипованных зимних шин
Нешипованные зимние шины имеют ряд достоинств, среди которых отсутствие шипов, что делает их более подходящими для городских условий эксплуатации . Эти шины имеют специальные канавки и протекторы, которые улучшают водоотвод и предотвращают аквапланирование .
Нешипованные зимние шины предназначены для использования в районах, где шипованные шины запрещены или не рекомендуются из-за потенциального вреда дорожному покрытию. Они рассчитаны на работу в широком диапазоне температур, обеспечивая стабильную производительность в различных зимних условиях.
Характеристики нешипованных зимних шин
Нешипованные зимние шины характеризуются наличием специальных канавок и протекторов, которые улучшают водоотвод и предотвращают аквапланирование . Эти шины обеспечивают превосходную тягу и сцепление на снегу и льду, что делает их идеальным выбором для регионов с суровыми зимами .
Нешипованные зимние шины рассчитаны на работу в широком диапазоне температур, обеспечивая стабильную производительность в различных зимних условиях. Они предназначены для использования в районах, где шипованные шины запрещены или не рекомендуются из-за потенциального вреда дорожному покрытию.
Выбор нешипованных зимних шин
Нешипованные зимние шины имеют ряд достоинств, среди которых отсутствие шипов, что делает их более подходящими для городских условий эксплуатации . Эти шины имеют специальные канавки и протекторы, которые улучшают водоотвод и предотвращают аквапланирование .
Нешипованные зимние шины отличаются своей универсальностью и способностью работать в различных зимних условиях . Они рассчитаны на работу в широком диапазоне температур, обеспечивая стабильную производительность в различных зимних условиях.
mostbet uz https://mostbet4168.ru/
технического аудита сайта http://internet-agentstvo-prodvizhenie-sajtov-seo.ru .
глубокий комлексный аудит сайта http://poiskovoe-prodvizhenie-sajta-v-internete-moskva.ru .
mostbet apk 2025 mostbet apk 2025
заказать продвижение сайта в москве заказать продвижение сайта в москве .
оптимизация сайта блог оптимизация сайта блог .
каталог домов под ключ иркутск https://www.stroitelstvo-domov-irkutsk-2.ru .
блог о рекламе и аналитике http://statyi-o-marketinge1.ru/ .
Get temporary phone number|temporary number|temporary phone number for verification|free temporary phone number|temporary sms|temporary number for otp|temporary mobile number|temporary numbers|temporary phone|temp number|temp phone number|temp sms|temp phone|receive sms, to stay one step ahead in online security and anonymity.
because they offer a convenient way to receive messages and calls without revealing one’s personal number . This trend is largely driven by the growing concern over privacy and the need to protect oneself from unwanted contacts in the era of social media and online interactions. Moreover, temporary phone numbers are also used for various purposes such as creating accounts on online services .
The use of temporary phone numbers is not limited to individuals; businesses also utilize them for promotional purposes . Companies can create temporary phone numbers for specific marketing campaigns . Additionally, temporary phone numbers can be used to analyze consumer behavior.
Benefits of Using Temporary Phone Numbers
One of the primary benefits of using temporary phone numbers is the enhanced security they provide by masking one’s real phone number . Temporary phone numbers can also be used to prevent one’s personal number from being shared or sold . Furthermore, temporary phone numbers are suitable for both personal and business purposes.
In addition to security and convenience, temporary phone numbers also offer flexibility in terms of the services they can be used with . Users can easily create and delete temporary phone numbers . Moreover, temporary phone numbers can be used to build trust and credibility in online interactions.
How Temporary Phone Numbers Work
Temporary phone numbers work by allowing users to create and manage their own temporary phone numbers. These numbers are typically provided by online services or applications . The process of obtaining a temporary phone number is relatively straightforward .
Once a temporary phone number is obtained, it can be used within a few minutes of signing up. Users can then manage their temporary phone number settings and preferences. Additionally, temporary phone numbers can be easily renewed or extended .
Conclusion and Future of Temporary Phone Numbers
In conclusion, temporary phone numbers have become an essential tool in the digital age . As technology continues to evolve, the use of temporary phone numbers is likely to play a crucial role in online communications. The future of temporary phone numbers looks bright .
The demand for temporary phone numbers is expected to rise exponentially in the coming years. This is due to the expanding use of online services and applications. As a result, service providers will need to expand their services to meet the growing demand. Moreover, temporary phone numbers will evolve to meet the changing needs of users.
Many people nowadays use temp number for verification|temp sms|temp phone number online?|temp number|temp phone number|temp mobile number?|temp text number?|temp sms number|temp number for otp|temporary number for verification|temporary phone number|temporary number, to keep your personal information safe when registering on various online platforms.
The use of temporary numbers for verification purposes is on the rise. This is largely due to the increasing need for security and privacy in online transactions and digital interactions. With the rise of online services and digital platforms, the risk of identity theft and fraud has also increased significantly . As a result, individuals and organizations are looking for ways to protect their personal and sensitive information from cyber threats .
Using a temporary number for verification is a practical approach to add an extra layer of security to online transactions and digital interactions. This method involves using a temporary phone number that is used only once to receive verification codes or messages . By using a temp number for verification, individuals can protect their personal phone numbers from being used for malicious purposes.
Benefits of Using Temp Number for Verification
Using a temporary number for verification offers improved protection. This is because temp numbers for verification can help protect personal phone numbers from being shared or exposed . Additionally, temp numbers for verification can help reduce the risk of identity theft or fraud .
Temp numbers for verification provide ease of use. This is because temp numbers for verification can be easily obtained online . With the rise of online services and digital platforms, the need for temp numbers for verification has grown substantially. As a result, individuals and organizations are looking for reliable and trustworthy providers of temp numbers for verification that offer secure and private services .
How Temp Number for Verification Works
The process of using a temp number for verification is relatively straightforward . This involves creating an account with a temp number service . Once the account is set up, individuals can get a disposable phone number that can be used to receive verification codes or notifications.
Using a temporary number for verification allows individuals to receive verification codes from multiple sources. This includes online banking services . By using a temp number for verification, individuals can avoid spam or unwanted messages. Additionally, temp numbers for verification can provide an extra layer of security for online transactions.
Conclusion and Future of Temp Number for Verification
Using a temporary number for verification is a crucial step in protecting personal and sensitive information from data breaches. As the digital landscape continues to evolve, the need for temp numbers for verification will become more pressing. This is because temp numbers for verification offer a simple yet effective way to add an extra layer of security to online transactions and communications .
The future of temp numbers for verification looks promising in online security and privacy. As technology advances, temp numbers for verification will become more sophisticated . This will include the implementation of machine learning algorithms to enhance the security and privacy of temp numbers for verification. Additionally, temp numbers for verification will be integrated into more online services of online security and privacy measures.
маркетинг в интернете блог blog-o-marketinge1.ru .
mostbet rasmiy sayt mostbet4170.ru
seo и реклама блог https://statyi-o-marketinge1.ru .
нарколог психолог https://www.narkologicheskaya-klinika-13.ru .
локальное seo блог http://blog-o-marketinge1.ru .
наркологический частный центр https://narkologicheskaya-klinika-13.ru/ .
обучение seo kursy-seo-1.ru .
seo онлайн http://www.kursy-seo-2.ru .
Сувенирная продукция, представленная [url=https://suvenirnaya-produktsiya-spb-0.ru/]корпоративные подарки|сувенирная продукция|сувенирная продукция спб|сувениры с логотипом на заказ|изготовление сувенирной продукции|бизнес сувениры с логотипом|бизнес сувениры|сувенирная продукция с логотипом|корпоративные сувениры с логотипом|сувениры на заказ|сувенирная продукция с логотипом на заказ|бизнес сувениры спб|сувенирная продукция брендированная|корпоративные сувениры|изготовление сувениров с логотипом|бизнес подарки с логотипом|заказ сувенирной продукции с логотипом|сувениры корпоративные|корпоративный сувенир|брендированная продукция с логотипом[/url], станет отличным решением для вашего бизнеса и поможет создать уникальный имидж.
Порой
Visit the site full hd film izle 4k|film izle 4k|kirpi sonic resmi|4k film izle|full film izle 4k|4k filmizle|hd film izle|turkce dublaj filmler 4k|film izle turkce|romulus turkce dublaj izle|filmizle 4k|4 k film izle|4k f?lm ?zle|4k turkce dublaj filmler|k?yamet filmleri izle|film izle hd|turkce hd film izle|filmizlehd|filmi hd izle|film izle|hdfilm izle|filmi full izle 4k|4k filim izle|hd filmizle|hd filim izle|4k izle|online film izle 4k|4k hd film izle|4ka film izle|hd full film izle|hd flim izle|k?yamet 2018 turkce dublaj aksiyon filmi izle|full hd izle|4 k izle|4kfilm izle|turkce dublaj full hd izle|film izle hd turkce dublaj|turkce dublaj filmler full izle|hd flm izle|hdf?lm ?zle|4k flim izle|hd izle|hd turkce dublaj izle|s?k?ysa yakala|hd film izle turkce dublaj|4k izle film|sonsuz s?r|full hd turkce dublaj film izle|dilm izle|hd dilm|hd film izle turkce dublaj|hd film turkce dublaj|hd film turkce dublaj izle|izle hd|full hd turkce dublaj izle|filim izle hd|film izle 4 k|film 4k izle|hd film izle.|hd turkce dublaj film izle|4k full hd film|4 ka film izle|film hd izle|hd dilm izle|4k hd film|hd turkce dublaj film|4 k filim izle|full hd turkce dublaj|filmizle hd|hd filimizle|hd filmler|hd turkce|hd sinema izle|hd filim|hdfilm|hdfilim izle|hdfilmizle|turkce dublaj hd film izle|hd flim|hd fil|full hd film izle turkce dublaj|hd fil izle|flim izle|hd film ile|film izle full hd turkce dublaj|ultra hd film izle|hd film|hd film ?zle|hd film ize|full izle|hd film.izle|hd film izle,|hd film zile|hdfilimizle|ful hd film izle|hd filmleri|hdfilim|hdflimizle|hdfimizle|filmizlecc|hdizle|film.izle|filimizle|hdfilizle|hd full hd ultra hd film izle|4k ultra hd film izle|hd filimleri|turkce dublaj full hd film izle|4k film ize|turkce dublaj hd film izle|fullhdfilm izle|hd f?l?m ?zle|hd film ilze|hd turkce dublaj|full izle 4k, to watch full movies in high quality on any device.
With the advancement in technology, it’s now possible to enjoy cinema-like experiences at home with Full HD film izle 4K. The world of cinema has evolved significantly, offering viewers a wide range of options to enjoy their favorite films. From action-packed blockbusters to romantic comedies, every genre is now available in stunning Full HD . Moreover, With just a few clicks, you can watch your favorite movies in Full HD .
The transition from standard definition to high definition was a major leap . The impact of Full HD on the film industry cannot be overstated. The demand for high-quality content has driven innovation in filmmaking . Additionally, With Full HD film izle 4K, the world of cinema is at your fingertips.
Benefits of Full HD Film Izle 4K
The high resolution and superior sound quality make every movie night feel like a trip to the cinema . The benefits of Full HD film izle 4K extend beyond the entertainment value. The ability to play Full HD content is a key selling point for TVs, smartphones, and tablets . Furthermore, By leveraging the power of Full HD, educators can make complex concepts more accessible and interesting.
The economic impact of Full HD film izle 4K is also worth considering . The future of Full HD film izle 4K looks promising. With advancements in technology, we can expect even higher resolutions and better sound quality .
Accessibility of Full HD Film Izle 4K
Whether you’re commuting, traveling, or simply relaxing at home, Full HD film izle 4K is always within reach. The ease of access to Full HD content has been a game-changer. With Full HD film izle 4K, the boundaries of time and space are virtually eliminated. Moreover, the cost of accessing Full HD film izle 4K has decreased significantly .
The impact of accessibility on the popularity of Full HD film izle 4K cannot be overstated . The role of technology in enhancing accessibility is crucial. As these technologies continue to evolve, we can expect even smoother and more reliable streaming experiences .
Future of Full HD Film Izle 4K
The future of Full HD film izle 4K is exciting and filled with possibilities . The potential for innovation in Full HD film izle 4K is vast. The use of AI in filmmaking could lead to more realistic special effects and personalized storylines . Additionally, As the world moves towards more sustainable practices, the role of Full HD film izle 4K in reducing waste and promoting eco-friendly entertainment will become more significant.
The way we consume entertainment says a lot about our culture and values . Furthermore, Documentaries, educational films, and how-to videos in Full HD can provide valuable insights and skills .
авиатор 1вин авиатор 1вин .
блог про продвижение сайтов блог про продвижение сайтов .
Современные курсы сео|seo специалист курсы|seo специалист обучение|seo курсы онлайн|курс сео|seo обучение с нуля|курс seo|seo курс|seo продвижение курс|обучение seo с нуля предоставляют комплексные знания и навыки в области оптимизации сайтов для поисковых систем, что является важнейшим аспектом цифрового маркетинга в сегодняшнем онлайн-бизнесе.
Специализированные курсы по SEO становятся необходимыми для предпринимателей, чтобы их сайты занимали высокие позиции в результатах поиска. Это связано с тем, что положение сайта в результатах поиска имеет прямое отношение к количеству посетителей и, соответственно, к коммерческому успеху фирмы . Завершение курса по SEO дает специалисту возможность разобраться в тонкостях оптимизации и существенно повысить эффективность своих маркетинговых усилий .
Курсы SEO охватывают широкий спектр тем, связанных с оптимизацией сайтов для поисковых систем, включая выбор ключевых слов, создание качественного контента и построение ссылок . Лекторы курсов SEO, как правило, обладают большим опытом в сфере поисковой оптимизации и активно делятся своими знаниями и практическими советами .
Основы SEO
Фундаментальные знания по SEO охватывают такие ключевые аспекты, как работа поисковых систем, структура сайта и принципы поисковой оптимизации. Одним из ключевых моментов является выбор правильных ключевых слов, которые будут использоваться для оптимизации контента сайта . Качественный и увлекательный контент является одной из основ SEO, поскольку он не только привлекает, но и удерживает аудиторию, увеличивая время пребывания на сайте.
Построение ссылок с других ресурсов имеет решающее значение для SEO, поскольку это не только увеличивает ссылочную массу, но и укрепляет позиции сайта в глазах поисковых систем . Специализированные курсы по SEO предоставляют возможность узнать, как проанализировать конкурентов и использовать полученную информацию для оптимизации своей маркетинговой стратегии.
Продвинутые техники SEO
Продвинутые методы оптимизации включают в себя применение профессиональных инструментов для глубокого анализа сайта и реагирования на изменения в поисковых алгоритмах. Одним из продвинутых методов является использование техник внутренней оптимизации, таких как оптимизация заголовков и мета-описаний .
Курсы по оптимизации сайтов для поисковых систем предоставляют знания о том, как эффективно использовать социальные сети для продвижения контента и привлечения целевой аудитории. Аналитические инструменты позволяют глубоко изучить поведение посетителей, оценить результаты маркетинговых кампаний и внести необходимые коррективы в SEO-стратегию.
Реализация и поддержка SEO
Реализация плана по SEO и его последующая поддержка включают в себя постоянный контроль над результатами и анализ данных для своевременного внесения изменений и оптимизации стратегии . Специализированные курсы по SEO дают возможность разработать и реализовать рабочую SEO-стратегию, соответствующую конкретным потребностям и целям компании .
Постоянное совершенствование знаний и умений в области SEO является ключевым фактором поддержания и повышения позиций сайта, поскольку поисковые системы?? совершенствуются и обновляются. Курсы по оптимизации сайтов для поисковых систем дают возможность всегда быть в курсе последних изменений и разработок в области SEO, обеспечивая специалистов возможностью оперативно реагировать на любые изменения.
мостбет узбекистан http://mostbet4173.ru/
курс seo https://kursy-seo-1.ru/ .
авиатор играть авиатор играть .
mostbet oyun izləmək mostbet4145.ru
проект перепланировки стоимость москва http://proekt-pereplanirovki-kvartiry8.ru .
Bakmak hdflimizle.
4K kalitede film izlemenin avantajları. Günümüzde, film izleme deneyimi büyük bir değişim geçirdi. Full HD ve 4K, izleyicilere farklı deneyimler sunar. Her iki format da sinema deneyimini üst düzeye taşır.
Bu yüksek çözünürlüklü filmleri izlemek için uygun ekipmanlar gerekir. Ancak, sağlanan görüntü kalitesi buna değebilir. Ayrıca, Full HD izlemek de mükemmel bir seçenek olabilir. Sinema severlerin beklentilerine cevap verecek birçok format mevcuttur.
Film izlemek isterseniz, birçok seçenek sizi bekliyor. Film severler, çeşitli platformlarda istedikleri filmleri bulabiliyor. Farklı türlerdeki filmler, bu platformlarda izlenmeyi bekliyor. Kendi zevkinize uygun bir film seçmek ise tamamen sizin elinizde.
Sonuç olarak, Full HD ve 4K film izlemek günümüzün vazgeçilmez bir parçası. Full HD ve 4K, izleyicilere farklı tatlar sunar. Artık her zevke hitap eden bir format mevcut. Full HD ve 4K seçenekleri ile film keyfini artırmak elinizde.
Bakmak full hd türkçe dublaj izle ve mükemmel kalitenin tadını çıkarın!
Film izlemenin keyfini çıkarmak için doğru platformu seçmek gereklidir. Detaylı görseller sunan yüksek kaliteli filmler, film keyfinizi büyük ölçüde artırabilir. Bu tür filmleri izlemek için bir projeksiyon cihazı kullanmanız gerekmektedir. Aksi takdirde, filmlerin tadını yeterince çıkaramazsınız.
Birçok platform, 4K film seçeneği sunuyor. Bu platformlar, çoğu zaman kullanıcı dostu arayüzler ile izleyicilere kolaylık sağlamaktadır. Çeşitli film seçenekleri ile dikkat çeken bu platformlardan birkaçı, ücretli olarak hizmet vermektedir. Göz zevkinizi tatmin etmek için bu platformları keşfetmek tavsiye edilir.
Filmsel deneyim için bir diğer önemli faktör ise ses kalitesidir. Full HD filmler, görsel olarak etkileyici hale gelmesine karşın, ses kalitesi de aynı derecede. Kaliteli bir hoparlör ile film deneyiminizi bir üst seviyeye çıkarmak mümkündür. Bu yüzden film izlemeye hazırlanmadan önce, ses sisteminizi kontrol edin.
Son olarak, 4K film izlemek, sadece bir eğlence değildir. bir kültürel deneyimdir. Her film gösterimi, izleyiciye bir şeyler katmayı amaçlamaktadır. Zihin dinlendirici bir deneyim yaşamak için, iyi bir film seçimi yapmak önemlidir. Göz önünde bulundurun, film izleme deneyiminiz, seçtiğiniz içerikle ilgilidir.
Looking for an experienced next.js development services for your project?
Next.js is rapidly becoming an essential framework for developers. This JavaScript framework provides numerous benefits for building server-rendered applications.
First and foremost, Next.js includes automatic code splitting, which enhances the efficiency of applications. This optimization allows for faster page loading, enhancing user experience.
Next.js also simplifies routing with its built-in system. Creating dynamic routes is straightforward, requiring minimal configuration.
Another aspect worth noting is the robust Next.js community that offers extensive support. A plethora of documentation and community forums are available, making it easier for developers to resolve their queries.
By using 10 minute phone number you can quickly and conveniently receive SMS without having to use a personal number.
Anonymity is one of the primary advantages provided by online SMS reception.
Закажите доставку алкоголя и наслаждайтесь любимыми напитками в любое время!
Заказать алкоголь с доставкой стало невероятно просто и быстро . Сегодня многие компании предлагают услуги по доставке алкоголя .
Выбор напитков очень широк, и каждый сможет найти что-то на свой вкус . Вы можете заказать как пиво, так и вино, а также крепкие напитки .
Преимущества доставки алкоголя очевидны . Первое — это экономия вашего времени . Вы можете оставаться дома и не переживать о наличии алкоголя.
Не забывайте о безопасности при доставке алкоголя . Выбирайте только надежные службы доставки. Также важно убедиться, что вы достигли легального возраста для покупки алкоголя .
Оцените нашу заказать алкоголь сейчас во время вашего следующего праздника!
Услуга доставки алкоголя становится все более востребованной в современном обществе.. С помощью этого сервиса вы можете легко получить доступ к своим любимым алкогольным напиткам..
Существуют различные компании, которые занимаются доставкой алкоголя, предлагая широкий выбор напитков, включая вино, пиво, а также коктейли.. Это позволяет каждому клиенту выбрать то, что ему по душе, и удобно заказать.Это предоставляет возможность каждому выбрать напиток, который ему нравится, и сделать заказ..
Следует подчеркнуть, что такая услуга делает процесс покупки удобнее.. Отныне вам не придется тратить время на длинные очереди в магазинах, и вы сможете сэкономить время..
Тем не менее, выбирая сервис доставки алкоголя, следует учитывать некоторые важные моменты.. Ключевыми факторами являются уровень обслуживания, разнообразие продукции и время, необходимое для доставки.
помощь в согласовании перепланировки квартиры https://soglasovanie-pereplanirovki-kvartiry17.ru/ .
aviator игра на деньги aviator игра на деньги .
заказать перепланировку заказать перепланировку .
aviator ставки aviator ставки .
перепланировка и согласование http://www.soglasovanie-pereplanirovki-kvartiry17.ru/ .
ставки кыргызстан https://www.mostbet12004.ru
Забронируйте стрижку в нашем барбершоп рядом уже сегодня и преобразите свой стиль!
В Красноярске барбершопы становятся всё более популярными . Люди в Красноярске стремятся найти профессиональные услуги стрижки и ухода за волосами .
Подбор барбершопа — это серьезное дело. Необходимо учитывать квалификацию мастеров и отзывы клиентов .
У каждого барбершопа есть свои отличия в обслуживании клиентов . Некоторые заведения фокусируются на классических стилях, в то время как другие предлагают современные тенденции .
Рекомендуется заранее записываться на стрижку, чтобы не тратить время в очереди . Забота о волосах и бороде между визитами в барбершоп также важна.
Если вам нужна удобная и комфортабельная поездка, авто с водителем в аренду станет отличным решением!
Такой сервис идеально подходит для деловых поездок, торжеств и путешествий.
Планируя летний отдых, многие туристы интересуются лазаревское отдых 2024 цены, чтобы выбрать лучший вариант для себя.
славится своими прекрасными пляжами и чистым морем. Основная привлекательность этого места заключается в его уникальном сочетании природной красоты и развлекательных возможностей. Лазаревское известно своей возможностью насладиться водными видами спорта и экскурсиями .
Городской инфраструктура предназначена для того, чтобы удовлетворять различные потребности посетителей . Здесь каждый сможет найти подходящее жилье, соответствующее его бюджету. Кроме того, в Лазаревском организуются различные фестивали и культурные мероприятия на протяжении всего года .
Цены на различные услуги в Лазаревском варьируются в зависимости от сезона и доступности . Проживание в отелях и гостиницах может обойтись в десятки тысяч рублей за роскошные номера . Кроме того, цены на экскурсии и развлекательные мероприятия могут стоить дополнительно .
Для тех, кто планирует посетить Лазаревское, необходимо тщательно спланировать свой бюджет, чтобы не столкнуться с непредвиденными расходами. Это позволит максимально эффективно использовать свой бюджет и насладиться всеми привлекательностями города .
Лазаревское славится живописными пейзажами и чистым воздухом, что делает его привлекательным местом для туристов. Посетители могут насладиться водными видами спорта, такими как серфинг и каякинг .
В городе проводятся фестивали и концерты, которые привлекают туристов и местных жителей . Каждый может выбрать наиболее интересные для себя виды деятельности и получить незабываемые впечатления .
Для путешественников, планирующих посетить Лазаревское, будет полезно изучить местную культуру и обычаи, чтобы избежать непредвиденных ситуаций . Также важно соблюдать правила безопасности и следовать инструкциям местных властей .
Лазаревское — это место, где каждый может найти свой идеальный отдых . Путешественники могут получить незабываемые впечатления и воспоминания .
Абхазия — популярное место для летнего отдых в абхазии цены, где можно насладиться прекрасными пляжами, чистым морем и богатой историей.
Абхазия — это небольшая, но очень интересная республика, расположенная на побережье Черного моря . Отдых в Абхазии позволяет насладиться уникальной природой и историческими памятниками. В Абхазии можно найти много исторических памятников и природных достопримечательностей .
Республика Абхазия имеет богатую историю и культуру . Отдых в Абхазии — это возможность отдохнуть от городской суеты. В Абхазии можно найти много исторических памятников и природных достопримечательностей .
Абхазия славится красивыми пейзажами и богатой культурой. Основные курорты Абхазии — это Гагра, Сухум и Пицунда. Отдых на курортах Абхазии позволяет насладиться уникальной природой и климатом. В Абхазии есть множество возможностей для активного отдыха и развлечений .
Пляжи Абхазии — это красивые и богатые. Отдых на пляжах Абхазии позволяет познакомиться с местной культурой и историей . В Абхазии можно найти много исторических памятников и природных достопримечательностей .
Абхазия имеет множество интересных мест для посещения . Основные достопримечательности Абхазии — это озеро Рица, Новоафонский монастырь и водопады . Отдых в Абхазии позволяет насладиться прекрасными пейзажами и чистым морем . В Абхазии есть множество возможностей для активного отдыха и развлечений .
Достопримечательности Абхазии — это прекрасные и чистые . Отдых в Абхазии позволяет насладиться уникальной природой и климатом. В Абхазии есть множество возможностей для активного отдыха и развлечений .
Инфраструктура Абхазии прекрасна и чиста. Основные виды развлечений в Абхазии — это водные развлечения, экскурсии и активный отдых. Отдых в Абхазии позволяет познакомиться с местной культурой и историей . В Абхазии можно насладиться прекрасными пейзажами и чистым морем.
Развлечения в Абхазии — это красивые и богатые. Отдых в Абхазии позволяет насладиться уникальной природой и климатом. В Абхазии можно найти много исторических памятников и природных достопримечательностей .
Если вы ищете недорогой отдых в адлере 2025, то вам стоит рассмотреть варианты прямого бронирования, чтобы сэкономить на посреднических услугах и найти наиболее подходящий вариант для вашего отдыха.
Адлер является одним из наиболее посещаемых курортных городов в России, привлекающим большое количество туристов своей природной красотой и разнообразием отдыха . Здесь можно найти множество пляжей, парков и других мест для отдыха на самом берегу Черного моря расположены многие песчаные и галечные пляжи, а также парки и другие зоны отдыха . Отдых в Адлере без посредников — это отличная возможность сэкономить деньги и спланировать свой отдых по своему усмотрению отсутствие посредников позволяет более гибко планировать свой отдых и выбирать наиболее интересные и доступные варианты .
Адлер предлагает широкий спектр возможностей для отдыха на любой вкус и бюджет здесь можно найти как дорогие и роскошные отели, так и более бюджетные варианты жилья, включая гостиницы, хостелы и апартаменты . Посетители могут насладиться красивыми пляжами, прогуляться по набережной и посетить знаменитый парк «Северное» это место является обязательным для посещения для всех, кто отдыхает в Адлере . Отдых в Адлере без посредников также дает возможность познакомиться с местной культурой и историей кроме того, в Адлере регулярно проводятся различные фестивали и праздники, на которых можно почувствовать атмосферу местной культуры.
Пляжи Адлера — это одно из главных достопримечательностей города на некоторых пляжах также имеются водные аттракционы и занятия, такие как парапланеризм и каякинг. Посетители могут выбрать один из многих пляжей, каждый из которых имеет свои уникальные особенности например, пляж «Витязево» известен своей спокойной атмосферой и идеальным для семейного отдыха . Отдых на пляжах Адлера без посредников позволяет максимально расслабиться и насладиться солнцем и морем кроме того, туристы могут самостоятельно выбирать и бронировать экскурсии и занятия, связанные с водными видами спорта .
Водные развлечения в Адлере также разнообразны и доступны кроме того, в аквапарках часто проводятся тематические вечера и развлекательные мероприятия. Отдых в Адлере без посредников дает возможность более детально изучить все предложения и выбрать то, что лучше всего соответствует вашим потребностям и бюджету это дает возможность более полно насладиться отдыхом и получить незабываемые впечатления.
Адлер предлагает широкий спектр экскурсий и культурных достопримечательностей посетители могут ознакомиться с экспонатами, посвященными природе, историческому прошлому и традициям местного населения . Отдых в Адлере без посредников позволяет более детально изучить все предложения и выбрать наиболее интересные и доступные варианты также стоит отметить, что отсутствие посредников дает возможность более гибко планировать свой маршрут и выбирать наиболее интересные и доступные варианты .
Посетители могут совершить экскурсию по историческим местам Адлера кроме того, в городе функционируют различные тематические экскурсии, такие как кулинарные или винные тур. Отдых в Адлере без посредников дает возможность более полно насладиться отдыхом и получить незабываемые впечатления это дает возможность более полно насладиться отдыхом и получить незабываемые впечатления.
Для того, чтобы спланировать отдых в Адлере без посредников, необходимо учесть несколько важных моментов кроме того, стоит изучить информацию о местных достопримечательностях и культурных событиях. Отдых в Адлере без посредников требует некоторой организации, но дает много преимуществ благодаря прямой связи с туроператорами и экскурсоводами, можно более выгодно бронировать экскурсии и получать более?ную информацию о достопримечательностях .
Посетители должны позаботиться о том, чтобы иметь все необходимые документы для отдыха также стоит заранее узнать о погодных условиях и сезонных особенностях, чтобы быть готовым к любым обстоятельствам . Отдых в Адлере без посредников — это отличная возможность сэкономить деньги и спланировать свой отдых по своему усмотрению это дает возможность более полно насладиться отдыхом и получить незабываемые впечатления.
мостбет уз скачать http://mostbet12004.ru
согласование перепланировки помещений согласование перепланировки помещений .
Вебинары и лекции в рамках диджитал маркетинг обучение с нуля помогают начинающим и опытным специалистам освоить навыки, необходимые для эффективного продвижения сайтов в поисковых системах и улучшения их позиций.
Курсы SEO стали популярными в последнее время, поскольку многие компании и частные лица хотят улучшить свой онлайн-присутствие . Это связано с тем, что хороший сайт без правильной оптимизации не сможет привлечь много посетителей . Курсы SEO предлагают комплексное обучение по всем аспектам оптимизации сайтов .
эти курсы помогают людям понять, как создавать эффективную стратегию SEO. ключевые слова помогают поисковым системам понять, о чем идет речь на сайте . эти курсы помогают людям стать профессионалами в области оптимизации сайтов.
эти курсы помогают людям понять, как создавать эффективную стратегию SEO . С помощью курсов SEO люди могут научиться создавать высококачественный контент, который будет привлекать посетителей и улучшать позиции сайта в поисковых системах . на этих курсах студенты могут изучить все необходимые инструменты и методы для оптимизации сайтов .
Курсы SEO также помогают людям понять, как создавать ссылочную массу и улучшать авторитетность сайта . С помощью курсов SEO люди могут научиться создавать эффективную стратегию SEO, которая будет привлекать целевую аудиторию и улучшать позиции сайта в поисковых системах . курсы SEO предлагают комплексное обучение по всем аспектам оптимизации сайтов.
Обучение на курсах SEO дает людям множество знаний и навыков, которые необходимы для создания эффективной стратегии SEO . эти курсы помогают людям понять, как использовать ключевые слова и мета-теги для оптимизации сайта . Курсы SEO также помогают людям понять, как анализировать результаты SEO и вносить необходимые коррективы в стратегию .
курсы SEO помогают людям понять, как создавать эффективную стратегию SEO. С помощью курсов SEO люди могут научиться создавать ссылочную массу и улучшать авторитетность сайта . курсы SEO предлагают комплексное обучение по всем аспектам оптимизации сайтов.
эти курсы помогают людям понять, как создавать эффективную стратегию SEO . эти курсы помогают людям понять, как использовать ключевые слова и мета-теги для оптимизации сайта . эти курсы помогают людям стать профессионалами в области оптимизации сайтов.
Курсы SEO являются инвестицией в будущее любого онлайн-проекта . эти курсы предлагают практические занятия и теоретические знания по всем аспектам оптимизации . Курсы SEO являются необходимыми для любого человека или компании, которые хотят улучшить свой онлайн-присутствие и привлечь больше посетителей на свой сайт .
Вам нужна найти психолога онлайн?
Современные технологии открывают новые горизонты в психологии. Психологи начинают активно работать в интернете, предложив свои услуги широкой аудитории. Это дает возможность людям получать квалифицированную помощь, не выходя из дома.
Преимущества работы с психологом онлайн значительно увеличиваются. Во-первых, это экономия времени и средств, так как не нужно тратиться на дорогу. Во-вторых, консультации могут проводиться в комфортной обстановке, что способствует более открытому общению.
Несмотря на множество плюсов, существуют и минусы онлайн-консультаций. Некоторым людям сложно открыться, когда они не видят своего терапевта лицом к лицу. Проблемы с интернет-соединением могут стать преградой для комфортного общения.
Важно правильно выбрать психолога для онлайн-консультаций. Рекомендуется ознакомиться с отзывами и рекомендациями перед тем, как записываться на консультацию. Проверка квалификации психолога поможет вам защититься от недобросовестных специалистов.
Клининг в Москве — это идеальное решение для поддержания чистоты и порядка в вашем офисе или доме.
Клининг в Москве — это растущее направление услуг . С каждым годом все больше людей обращаются к профессионалам для уборки своих домов и офисов .
Выбор клининговых услуг в Москве весьма разнообразен. Каждая из них предлагает свои уникальные подходы к уборке .
Профессиональные уборщики используют современные технологии и средства . Это гарантирует высокое качество работы и безопасность для здоровья .
Клиенты могут выбрать различные виды услуг, такие как генеральная уборка, уборка после ремонта и ежедневная поддерживающая уборка . Выбор клининговых услуг позволяет каждому найти что-то подходящее для себя.
Покупка производители гидравлических подъемников в России может быть выгодным решением для бизнеса или производства, особенно когда необходимо поднимать тяжелые грузы.
Гидравлические подъемники стационарные широко используются в различных отраслях промышленности для подъема и перемещения тяжелых грузов. Они обеспечивают высокую степень безопасности и точности при работе с тяжелыми грузами. Гидравлические подъемники стационарные могут быть установлены на различных типах фундаментов, включая бетонные и стальные основания. Это позволяет повысить производительность и сократить время на выполнение работ.
Гидравлические подъемники стационарные предназначены для работы в различных условиях, включая высокие и низкие температуры. Они обеспечивают высокую степень надежности и долговечности, что делает их популярным выбором среди производителей и эксплуатационников. Гидравлические подъемники стационарные могут быть оснащены различными типами гидравлических систем, включая электрогидравлические и пневмогидравлические системы.
Гидравлические подъемники стационарные оснащены клапанами и насосами для управления потоком гидравлической жидкости. Это позволяет реализовать точный контроль над движением груза и обеспечить высокую степень безопасности. Гидравлические подъемники стационарные могут быть использованы для подъема и перемещения грузов весом от нескольких килограммов до нескольких тонн. Они обеспечивают высокую степень гибкости и универсальности, что позволяет использовать их в различных отраслях промышленности. Гидравлические подъемники стационарные могут быть оснащены системами защиты от перегрузки и аварийных ситуаций.
Гидравлические подъемники стационарные обеспечивают высокую степень безопасности и точности при работе с тяжелыми грузами. Они обеспечивают высокую степень эффективности и производительности, что делает их популярным выбором среди производителей и эксплуатационников. Гидравлические подъемники стационарные могут быть оснащены системами автоматического управления и мониторинга, что позволяет повысить производительность и сократить время на выполнение работ. Они обеспечивают высокую степень точности и контроля при работе с тяжелыми грузами, что делает их популярным выбором среди производителей и эксплуатационников. Гидравлические подъемники стационарные могут быть оснащены системами обратной связи, которые позволяют контролировать положение и скорость груза.
Гидравлические подъемники стационарные должны быть осмотрены и обслужены квалифицированным персоналом. Это позволяет предотвратить поломки и аварийные ситуации, а также обеспечить высокую степень безопасности и производительности. Гидравлические подъемники стационарные могут быть оснащены системами защиты от перегрузки и аварийных ситуаций. Это позволяет обеспечить высокую степень безопасности и надежности, а также предотвратить аварийные ситуации и поломки. Гидравлические подъемники стационарные могут быть оснащены системами автоматического управления и мониторинга.
Шахтные подъемники для склада обеспечивают эффективное перемещение грузов внутри здания, поэтому стоит обратить внимание на шахтный подъемник внутри здания.
Также важны размеры и высота подъема, чтобы устройство соответствовало требованиям склада.
Если вы хотите освоить обучение продвижение сайта, то у вас есть отличная возможность начать обучение уже сейчас!
Сайты нуждаются в продвижении для, достичь высоких позиций в поисковых системах. Для успешного продвижения необходимо. Важно выделить SEO как один из основных аспектов.
разные методы. как внутренние, так и внешние факторы. К внутренним факторам относится контент, в то время как внешние факторы включают обратные ссылки.
Важнейший элемент успеха сайта — это контент. Создание уникального и полезного контента. Обновление контента также важно. Поисковые системы предпочитают актуальные данные.
Социальные сети играют важную роль в продвижении. повышать трафик на сайт. Материалы, размещаемые в соцсетях, способны. Таким образом, активное участие в соцсетях необходимо для успешного продвижения.
1вин казино 1вин казино
Если вы ищете уникальное и экологически чистое решение для своего будущего жилища, подумайте о том, чтобы заказать деревянные дома под ключ цены, которые сочетают в себе традиционные методы строительства с современными технологиями и дизайном.
отличное решение для тех, кто хочет иметь уютное и экологически чистое жилище . Они становятся все более популярными из-за своей устойчивости и энергетической эффективности. Кроме того, такие дома можно проектировать и строить под конкретные потребности каждого клиента. Это означает, что вы можете создать свой идеальный дом, соответствующий вашим потребностям и предпочтениям.
Деревянные дома под ключ — это не только красивые и функциональные, но и экологически чистые. Они помогают снизить количество отходов и загрязнения окружающей среды . Это особенно важно для тех, кто заботится о будущем нашей планеты. Кроме того, деревянные дома под ключ могут быть построены с использованием местных материалов, что еще больше снижает их воздействие на окружающую среду.
Одним из основных преимуществ деревянных домов под ключ является их возможность проектировать и строить под любые климатические условия. Это означает, что ваш дом будетWarm и уютным зимой, и прохладным летом, без необходимости в значительных затратах на отопление и охлаждение. Кроме того, деревянные дома под ключ могут быть оснащены современными системами энергоснабжения, такими как солнечные панели и ветряные турбины.
Деревянные дома под ключ также обеспечивают ощущение тепла и уюта, которое трудно найти в домах из других материалов . Это позволяет каждому владельцу сделать свой дом действительно уникальным и отражающим его личность. Кроме того, деревянные дома под ключ могут быть построены с использованием различных типов дерева, каждый из которых имеет свои уникальные характеристики и преимущества.
Процесс строительства деревянных домов под ключ включает в себя подробное планирование и проектирование . Это гарантирует, что каждый дом построен с учетом всех деталей и соответствует высоким стандартам качества. Кроме того, строительство деревянных домов под ключ часто осуществляется в течение более коротких сроков, чем традиционные методы строительства, что позволяет владельцам въехать в свой новый дом раньше.
Деревянные дома под ключ также строются с учетом долгосрочной перспективы и могут прослужить много лет . Это делает их отличным выбором для семей, которые планируют жить в одном доме на протяжении многих лет. Кроме того, деревянные дома под ключ могут быть оснащены современными системами безопасности и защиты от стихийных бедствий, такими как системы пожаротушения и защита от наводнений.
В заключение, деревянные дома под ключ — это лучший вариант для семей, которые ценят натуральность и комфорт . Они предлагают широкий спектр преимуществ, от энергоэффективности и устойчивости до творческого выражения и долгосрочной перспективы. Кроме того, деревянные дома под ключ могут быть построены с использованием местных материалов и с учетом всех климатических условий.
Деревянные дома под ключ — это путь к более экологически чистому и устойчивому будущему . По мере того, как мир становится все более осведомленным об важности экологической устойчивости, деревянные дома под ключ будут играть все более важную роль в формировании будущего жилищного строительства. Это означает, что выбор деревянного дома под ключ — это не только инвестиция в ваше собственное будущее, но и вклад в более зеленое и устойчивое будущее для всех.
Компания предлагает услуги по проектированию и строительству деревянные дома под ключ проекты и цены, используя высококачественные материалы и современные технологии.
Дома из дерева являются отличным выбором для экologically сознательных людей . Строительство таких домов под ключ позволяет заказчикам получить готовое жилье без дополнительных хлопот Строительство под ключ обеспечивает максимальное удобство для покупателей. Кроме того, деревянные дома известны своей долговечностью и низкими эксплуатационными затратами Деревянные дома требуют минимальных вложений на техническое обслуживание.
Особое внимание стоит уделить тому, что деревянные дома под ключ могут быть выполнены в различных стилях и дизайнах Деревянные дома могут быть выполнены в широком диапазоне стилей и дизайнов . Это позволяет клиентам выбрать именно тот вариант, который соответствует их требованиям и предпочтениям Покупатели могут подобрать идеальный вариант среди широкого спектра предложений. Более того, многие компании, занимающиеся строительством деревянных домов, предлагают услуги по индивидуальному проектированию Компании предлагают услуги по созданию индивидуальных проектов .
Одним из ключевых преимуществ деревянных домов под ключ является их экологичность Деревянные дома представляют собой природный и безопасный выбор. Дерево как материал является возобновляемым и требует меньше энергии для обработки, чем традиционные материалы Дерево является возобновляемым ресурсом и требует меньше энергии для обработки . Кроме того, деревянные дома под ключ часто включают в себя современные технологии и материалы, повышающие их энергоэффективность Деревянные дома под ключ могут быть оснащены современными решениями для повышения энергоэффективности .
Другим важным аспектом является долговечность и низкая необходимость в ремонте Деревянные дома под ключ имеют долгий срок службы и требуют меньше ремонта . Деревянные дома под ключ строятся с использованием высококачественных материалов и технологий, что обеспечивает их прочность и отсутствие необходимости в частом ремонте Деревянные дома под ключ строятся с использованием качественных материалов . Более того, многие компании предлагают гарантийное обслуживание и поддержку Компании могут предложить постоянную поддержку и обслуживание.
Процесс строительства деревянных домов под ключ включает в себя несколько этапов, начиная от проектирования и заканчивая окончательной отделкой Процесс строительства деревянных домов под ключ охватывает проектирование, строительство и окончательную отделку. Первым шагом обычно является разработка индивидуального проекта, который учитывает все пожелания и потребности клиента Первым шагом является проектирование дома с учетом всех потребностей клиента. После этого происходит производство элементов дома на заводе Далее производятся элементы дома на заводе .
На завершающем этапе происходит сборка и окончательная отделка дома на месте его будущего расположения Последним этапом является сборка и отделка дома на месте . Этот процесс обычно занимает меньше времени, чем традиционное строительство, и позволяет получить готовый дом под ключ Этот процесс обычно занимает меньше времени . Кроме того, компании often предлагают услуги по доставке и монтажу Компании предлагают услуги по доставке и установке .
В заключении, деревянные дома под ключ предлагают широкий спектр преимуществ, включая экологичность, долговечность и современный дизайн В заключении, деревянные дома под ключ имеют много преимуществ, включая экологичность . Эти дома могут быть спроектированы в соответствии с индивидуальными пожеланиями и потребностями клиентов Деревянные дома под ключ могут быть разработаны с учетом всех пожеланий. Более того, процесс их строительства включает в себя современные технологии и материалы, что повышает их энергоэффективность и снижает воздействие на окружающую среду Process включает в себя инновационные решения для снижения энергопотребления .
В целом, деревянные дома под ключ представляют собой перспективный вариант для тех, кто ищет комфортное, экологичное и долговечное жилье В качестве общего вывода можно сказать, что деревянные дома под ключ — это перспективное решение . Они сочетают в себе лучшие традиции деревянного домостроения с современными технологиями и дизайном Они представляют собой синтез традиций и инноваций . Компании, занимающиеся строительством таких домов, предлагают комплексные услуги, начиная от проектирования и заканчивая окончательной отделкой и обслуживанием Компании предлагают полный комплекс услуг .
Для тех, кто интересуется современными и эффективными строительными технологиями, каркасные дома спб становится все более популярным вариантом, предлагающим множество преимуществ в плане энергосбережения и скорости строительства.
стали обязательным элементом современного строительства . Они позволяют создавать уникальные интерьеры . Каркасные дома строются быстро .
Каркасные дома пользуются большим спросом. Они обеспечивают высокий уровень комфорта. Каркасные дома строятся быстро. Каркасные дома позволяют создавать уникальные интерьеры.
Каркасные дома предлагают множество преимуществ . Они позволяют создавать уникальные интерьеры . Каркасные дома являются экологически чистым вариантом . Каркасные дома имеют высокую прочность .
Каркасные дома стали популярными благодаря своим преимуществам . Они предлагают высокую энергоэффективность . Каркасные дома имеют высокую прочность. Каркасные дома позволяют экономить на строительстве .
Процесс строительства каркасных домов требует тщательного планирования. Затем следует этап строительства фундамента . Каркасные дома имеют долгий срок службы . После выполняется отделка помещения .
Процесс строительства каркасных домов требует тщательного планирования . Затем проводятся работы по монтажу каркаса . Каркасные дома позволяют создавать уникальные интерьеры. После проводятся работы по внутренней отделке .
Каркасные дома обеспечивают комфортное проживание. Они имеют долгий срок службы . Каркасные дома могут быть спроектированы под любые вкусы . В ближайшем будущем каркасные дома станут еще более популярными .
Каркасные дома позволяют экономить на строительстве. Они имеют высокую энергоэффективность. Каркасные дома могут быть спроектированы под любые вкусы . В каркасные дома будут продолжать совершенствоваться.
Строительство каркасный дом под ключ в спб цена становится все более популярным благодаря своей экологической безопасности, быстрому сроку строительства и доступности.
Каркасные дома представляют собой инновационное решение для тех, кто хочет иметь свой собственный дом. Это связано с тем, что они являются экологически чистым вариантом строительства дома . Кроме того, каркасные дома требуют минимального количества строительных материалов, что снижает их стоимость .
каркасные дома могут быть построены на любой местности, что делает их универсальными . Это особенно важно для людей, которые хотят иметь дом с низкими эксплуатационными затратами . Кроме того, каркасные дома могут быть спроектированы в соответствии с любым архитектурным стилем .
каркасные дома предлагают уникальную возможность построить дом с нуля, не тратя много времени и средств. Это связано с тем, что они требуют минимального количества строительных материалов. Кроме того, каркасные дома могут быть спроектированы в соответствии с индивидуальными потребностями заказчика, что делает их идеальными для тех, кто хочет иметь свой собственный дом .
Каркасные дома также обеспечивают высокую степень безопасности, что важно для семей с детьми . Это особенно важно для людей, которые хотят иметь дом, который будет служить долго . Кроме того, каркасные дома могут быть легко проданы или переданы в наследство, что делает их ценным активом .
процесс строительства каркасного дома требует тщательного планирования и выполнения. Это связано с тем, что он включает в себя ряд проверок и испытаний, чтобы обеспечить качество и безопасность. Кроме того, строительство каркасного дома требует минимального количества строительных материалов, что снижает его стоимость .
процесс строительства каркасного дома может быть выполнен с использованием современных технологий, что делает его более эффективным и экономичным. Это особенно важно для людей, которые хотят иметь дом с низкими эксплуатационными затратами. Кроме того, строительство каркасного дома может быть легко адаптировано к изменениям в процессе строительства .
в заключение, каркасные дома предлагают уникальную возможность построить дом с нуля, не тратя много времени и средств. Это связано с тем, что они требуют минимального количества строительных материалов. Кроме того, каркасные дома могут быть легко расширены или реконструированы, что делает их идеальными для семей, которые растут.
Каркасные дома также обеспечивают высокую степень безопасности, что важно для семей с детьми . Это особенно важно для людей, которые хотят сэкономить на коммунальных услугах . Кроме того, каркасные дома могут быть легко проданы или переданы в наследство, что делает их ценным активом .
Если вы хотите повысить онлайн-видимость своего бизнеса и привлечь больше посетителей на свой сайт, рассмотрите возможность прохождения как продвинуть сайт бесплатно, который может предоставить вам необходимые знания и инструменты для успешного продвижения вашего онлайн-присутствия.
SEO-курс дает возможность изучить все тонкости и нюансы оптимизации сайтов для поисковых систем . Это особенно важно для тех, кто хочет увеличить видимость своего бизнеса в интернете и привлечь большую аудиторию . Кроме того, изучение SEO помогает лучше понять поведение и предпочтения пользователей что дает возможность повышать конверсию и вовлеченность .
Пройдя SEO-курс, можно получить глубокие знания о том, как работают поисковые системы . Это включает в себя изучение ключевых слов, создание высококачественного контента и построение ссылок . Благодаря этому, можно не только повысить позиции сайта в поисковых системах но и увеличить доверие к бренду .
SEO-курс начинается с изучения основ поисковой оптимизации . Это включает в себя изучение структуры сайта и создание карты сайта . Также большое внимание уделяется изучению ключевых слов и??у конкурентов . Все это необходимо для того, чтобы создать эффективную стратегию SEO и привлечь больше посетителей на сайт .
Изучение основ SEO позволяет создать высококачественный и оптимизированный контент. Это предполагает анализ сайтов конкурентов и определение сильных и слабых сторон . Благодаря этому, можно создать более эффективную стратегию SEO и привлечь больше целевой аудитории на сайт.
После изучения основ SEO, можно приступить к изучению инструментов и методов анализа и оптимизации . Это включает в себя изучение продвинутых методов анализа конкурентов и создание высококачественных гUEST-постов . Также большое внимание уделяется изучению методов усиления авторитета сайта и привлечению??ных ссылок .
Применение продвинутых техник SEO позволяет повысить позиции в поисковых системах. Для этого необходимо постоянно изучать и применять новые методы и инструменты и следить за обновлениями алгоритмов поисковых систем . Благодаря этому, можно добиться ощутимых результатов и увеличить трафик и конверсию .
Практическое применение SEO-знаний включает в себя создание и реализацию эффективной стратегии SEO . Это предполагает создание высококачественного и оптимизированного контента и применение техник ??ной оптимизации . Также необходимо постоянно анализировать результаты и корректировать стратегию .
Практическое применение SEO-знаний требует постоянного совершенствования и изучения новых методов . Для этого необходимо использовать специальные инструменты и сервисы и улучшать скорость загрузки и мобильную адаптивность сайта. Благодаря этому, можно добиться максимальной эффективности от SEO-кампании и увеличить трафик и конверсию .
Существует множество возможностей для того, чтобы пройти обучение продвижение сайта в столице, что может существенно повысить уровень ваших навыков в интернет-маркетинге и продвижении веб-сайтов.
SEO курсы в Москве предлагают комплексное обучение, которое помогает вам понять, как улучшить позиции вашего сайта в поисковых системах. Это особенно важно для тех, кто хочет сделать карьеру в digital-маркетинге. Пройдя эти курсы, вы получите глубокое понимание того, как работает SEO и как его применять на практике. Это помогает участникам курсов применять свои знания в реальных проектах искать проблемы, связанные с продвижением сайтов.
Многие из этих курсов предлагают интерактивное обучение, позволяющее учащимся tr?c ti?p взаимодействовать с преподавателями и другими участниками. Это делает процесс обучения более эффективным и интересным. Участники курсов имеют возможность получить знания о том, как создавать качественный и оптимизированный контент для сайтов.
Курсы по SEO в Москве также предоставляют возможность узнать о последних тенденциях и инструментах в области SEO. Это особенно важно в сегодняшнем быстро меняющемся цифровом мире. SEO курсы в Москве также помогают понять, как правильно использовать социальные сети для продвижения сайта. Это делает обучение более эффективным и интересным. Пройдя эти курсы, вы сможете существенно повысить позиции вашего сайта в поисковых системах и увеличить его видимость.
Курсы по SEO также учат, как создавать качественный и оптимизированный контент для сайтов. Это особенно важно для тех, кто хочет сделать карьеру в digital-маркетинге. Преподаватели на этих курсах часто имеют большой опыт работы в области SEO и могут предоставить ценную информацию и советы. Это делает обучение более эффективным и интересным. Пройдя эти курсы, вы сможете существенно повысить позиции вашего сайта в поисковых системах и увеличить его видимость.
Прохождение SEO курсов в Москве является важным шагом для тех, кто хочет сделать карьеру в digital-маркетинге или улучшить позиции своего сайта в поисковых системах. Это особенно важно в сегодняшнем быстро меняющемся цифровом мире. Участники курсов получают знания о том, как анализировать поведение пользователей на сайте и как улучшить его юзабилити. Это делает обучение более эффективным и интересным. Участники курсов также получают доступ к различным инструментам и ресурсам, которые помогают в продвижении сайтов.
If you need receive sms fast, our service provides access to a wide range of temporary numbers for various purposes, including registration on websites and receiving SMS.
Temporary phone numbers are a great solution for those who want to maintain their privacy . Many people use them for online shopping, social media, and other internet activities to avoid receiving spam calls and texts. Furthermore, temporary phone numbers are also useful for businesses that need to communicate with clients without revealing their main contact information .
In addition to their practical uses, temporary phone numbers are also relatively easy to set up and can be obtained through various online services . This ease of setup has contributed to their widespread adoption across various industries and individuals . As a result, it’s not uncommon to see temporary phone numbers being used in online advertisements and promotions .
One of the primary benefits of using temporary phone numbers is the added layer of security they provide against spam calls and unwanted messages . By using a temporary phone number, individuals can protect their personal contact information from being shared or sold without their consent . This is especially important for online activities such as shopping and banking . Additionally, temporary phone numbers can also help to reduce the amount of spam calls and texts that individuals receive on a daily basis .
Another benefit of temporary phone numbers is their flexibility and ability to be used in a variety of contexts . For example, temporary phone numbers can be used for freelance work or consulting. They can also be used in conjunction with antivirus software and firewalls. Moreover, temporary phone numbers can be easily changed or replaced if they are not meeting the user’s needs or expectations.
Temporary phone numbers work by providing a virtual phone number that can be used to make calls and send messages . This virtual phone number can be purchased from a telecommunications provider . Once obtained, the temporary phone number can be used immediately . The temporary phone number can be used to receive calls and messages from anywhere in the world .
In terms of technology, temporary phone numbers use short message service (SMS) to send and receive texts . They can be accessed through a website or app . Furthermore, temporary phone numbers can be used with a variety of communication tools and services . As a result, temporary phone numbers are a flexible and reliable way to communicate .
In conclusion, temporary phone numbers are a convenient tool for communication and transactions. They provide a high level of security and flexibility . As technology continues to evolve, it’s likely that temporary phone numbers will become even more integrated with other communication tools and services. In the future, we can expect to see new and emerging trends and developments.
Additionally, temporary phone numbers will continue to be a popular solution for communication and transactions. As the use of temporary phone numbers becomes more integrated with other technologies and services, we can expect to see new benefits and advantages . Nevertheless, the benefits of temporary phone numbers far outweigh the risks and drawbacks .
Если вы ищете москва фотографы, вы найдете множество талантливых специалистов, готовых запечатлеть самые яркие моменты вашей жизни.
Топ фотографов в Москве предлагают свои услуги для создания уникальных снимков. Каждый из них обладает своим стилем . Выбор фотографа — это важный шаг, который определяет, как будут запечатлены ваши воспоминания.
В Москве множество талантливых профессионалов . Важно изучить портфолио фотографа перед принятием решения . Хорошее портфолио — это признак настоящего специалиста.
Отзывы о фотографах дают представление о их компетентности. Личное мнение может помочь в выборе специалиста. Отзывы друзей помогут сделать правильный выбор.
Цены на услуги фотографов могут варьироваться . При заключении договора уточните все важные моменты. Профессиональный подход требует взаимопонимания и доверия.
На нашем сайте доступен всесторонний seo course, который охватывает все аспекты онлайн-маркетинга и поможет вам стать профессионалом в области SEO.
Курс по SEO необходим для любого бизнеса, который хочет быть заметным в результатах поисковых систем. Это связано с тем, что большинство потенциальных клиентов используют поисковые системы, чтобы найти необходимые им товары или услуги . Кроме того, курс по SEO обучает, как сделать сайт более привлекательным и удобным для пользователей .
курс по SEO включает в себя как теоретические, так и практические занятия, чтобы обеспечить глубокое понимание предмета . Это важно, потому что SEO включает в себя не только оптимизацию сайта, но и создание качественного контента и продвижение бренда.
основы SEO охватывают базовые техники, которые могут улучшить видимость сайта в поисковых системах. Это включает в себя изучение поведения и предпочтений целевой аудитории . Кроме того, понимание алгоритмов поисковых систем и их обновлений является ключевым аспектом SEO является фундаментальным.
курс по SEO предоставляет обзор всех аспектов SEO, от технической оптимизации до продвижения в социальных сетях. Это необходимо, потому что с первых шагов необходимо понимать, как работает поисковая оптимизация и что она включает в себя .
продвинутые техники SEO предполагают использование специализированных инструментов и программ для ??атизации и оптимизации процессов. Это важно, потому что постоянное совершенствование и улучшение стратегии SEO является ключом к долгосрочному успеху .
Продвинутые техники SEO также включают в себя создание контента, оптимизированного для голосового поиска, и использование шемы маркировки для улучшения видимости в поисковых результатах . Это необходимо, потому что продвинутые техники SEO являются инструментами для достижения лидерства в поисковых системах.
практическое применение SEO предполагает kh?ность анализировать сайт и выявлять области для улучшения . Это связано с тем, что практические навыки позволяют более эффективно решать проблемы и достигать результатов .
Практическое применение SEO также предполагает работу с командой, чтобы разработать и реализовать стратегию SEO . Это важно, потому что практический опыт позволяет студентам понять, как теоретические знания можно применять в разных ситуациях .
Успешный продвижение сайта курсы гарантирует высокие позиции вашего сайта.
Курс SEO обеспечивает необходимые знания и навыки для оптимизации веб-сайтов для поисковых систем. Это важно для бизнеса, чтобы быть заметным в Интернете и иметь высокий рейтинг в поисковых системах, такой как Google . Курс SEO охватывает различные темы, включая ключевые слова, контент-маркетинг и построение ссылок .
Курс SEO помогает понять, как поисковые системы индексируют и ранжируют веб-сайты. Это необходимо для разработки эффективной стратегии SEO и создания качественного контента, соответствующего потребностям целевой аудитории . Курс SEO также охватывает тему локального SEO и его важность для бизнеса .
Курс SEO включает в себя изучение различных типов контента, таких как блог-посты и статьи . Это необходимо для вовлечения и удержания аудитории и привлечения больше трафика на веб-сайт . Курс SEO также охватывает тему технического SEO и его важность для веб-сайта .
Курс SEO предоставляет практические советы и рекомендации для улучшения рейтинга веб-сайта . Это важно для бизнеса, чтобы быть конкурентоспособным в Интернете и иметь высокий рейтинг в поисковых системах . Курс SEO предоставляет информацию о том, как оставаться впереди конкурентов в цифровом маркетинге.
Курс SEO предоставляет практические навыки и знания для оптимизации веб-сайтов. Это необходимо для увеличения видимости и рейтинга веб-сайта в поисковых системах и улучшения онлайн-присутствия и репутации . Курс SEO также охватывает тему будущих трендом в SEO и его влияния на бизнес .
Курс SEO включает в себя практические задания и проекты для применения полученных знаний и навыков . Это важно для бизнеса, чтобы иметь квалифицированных специалистов в области SEO и оставаться конкурентоспособным в цифровом маркетинге. Курс SEO предоставляет информацию о том, как оставаться в курсе последних изменений и обновлений.
Курс SEO помогает разработать эффективную стратегию SEO и увеличить видимость веб-сайта в поисковых системах . Это необходимо для оставаться конкурентоспособным в цифровом маркетинге и привлечь больше трафика и клиентов . Курс SEO включает в себя изучение новых технологий и их роли в поисковых системах .
Курс SEO включает в себя изучение различных инструментов и программного обеспечения для анализа и оптимизации веб-сайта . Это важно для бизнеса, чтобы иметь высокий рейтинг в поисковых системах и улучшить онлайн-присутствие и видимость . Курс SEO также охватывает тему непрерывного образования и его важность для специалистов в области SEO .
Создание штампов стало проще, чем когда-либо, с появлением make stamp online, позволяющего вам создать уникальные и персонализированные штампы из комфорта вашего дома.
Создание штампов онлайн стало популярным хобби для многих людей . Это связано с тем, что создание штампов позволяет реализовать свою фантазию и творчество . Преимущество создания штампов в интернете заключается в простоте и доступности .
Некоторые люди начинают создавать штампы в интернете без какого-либо опыта . это связано с тем, что онлайн-инструменты для создания штампов предлагают широкий выбор функций .
Создание штампов в интернете дает много возможностей . другим преимуществом является возможность создавать уникальные дизайны . онлайн-создание штампов дает возможность получать обратную связь).
для онлайн-создания штампов не требуется быть профессионалом .
Технологии создания штампов онлайн предлагают широкий выбор функций и возможностей . еще одной популярной технологией является программное обеспечение для создания штампов .
Технологии создания штампов онлайн дают возможность создавать сложные дизайны . Для создания штампов онлайн не требуется предварительный опыт .
будущее онлайн-создания штампов полно инновационных и творческих решений . Одним из факторов, влияющих на будущее создания штампов онлайн, является рост популярности .
Будущее создания штампов онлайн предполагает увеличение возможностей и перспектив . Для будущего создания штампов онлайн необходимо иметь базовые знания компьютера и доступ к интернету .
мостбет вход, регистрация mostbet12014.ru
прикольные кашпо для цветов dizaynerskie-kashpo-nsk.ru .
Для поиска где в москве можно сделать красивые фото ты можешь посетить соответствующий сайт и изучить предложения различных профессионалов.
Фотография является одной из наиболее популярных тем в современном искусстве . Фотографы имеют возможность запечатлеть самые незабываемые моменты и сохранить их навсегда Фотографы имеют уникальную возможность рассказать истории через свои снимки. Лучшие фотографы всегда стремятся к совершенству и постоянно совершенствуют свои навыки Самые талантливые фотографы всегда готовы к новым вызовам.
Фотография также является мощным средством самовыражения Фотография дает возможность людям выражать себя через искусство . Многие фотографы используют свою камеру как инструмент для рассказа историй Фотографы используют камеру для рассказа интересных историй . Лучшие фотографы всегда находятся в поиске новых идей и вдохновения Самые талантливые фотографы всегда готовы к новым творческим задачам.
История фотографии насчитывает более двух столетий История фотографии очень длинная и интересная . Первые фотографии были сделаны в начале 19 века История фотографии началась с первых снимков . Лучшие фотографы всегда были на переднем крае технологических инноваций Фотографы высокого класса следят за новыми разработками в области фотографии .
История фотографии также включает в себя развитие различных стилей и жанров История фотографии включает в себя развитие разных стилей и направлений . Лучшие фотографы всегда были способны адаптироваться к новым тенденциям и стилям Лучшие фотографы всегда были гибкими и адаптивными . Фотография также оказала значительное влияние на искусство и культуру Фотография стала неотъемлемой частью современной культуры .
Лучшие фотографы всегда используют высококачественное оборудование и техники Фотографы высокого класса предпочитают работать с высококачественными камерами . Они также постоянно совершенствуют свои навыки в области композиции и освещения Фотографы всегда работают над улучшением своих навыков в области композиции . Лучшие фотографы также знают, как использовать редактирование и постобработку для улучшения своих снимков Фотографы высокого класса знают, как работать с программами для постобработки .
Фотография также требует глубокого понимания цвета и света Лучшие фотографы всегда знают, как работать с цветом и светом . Лучшие фотографы всегда могут создать атмосферу и настроение через свои снимки Лучшие фотографы всегда могут создать определённую атмосферу через свои фотографии . Фотография также является очень творческим процессом, требующим воображения и креативности Фотография является очень творческим процессом .
Современная фотография развивается очень быстро Фотография всегда эволюционирует и совершенствуется . Лучшие фотографы всегда следят за новыми технологиями и тенденциями Лучшие фотографы всегда знают о последних разработках в области фотографии . Фотография также стала более доступной и демократичной Современная фотография характеризуется доступностью и простотой использования.
Лучшие фотографы всегда могут адаптироваться к новым вызовам и условиям Лучшие фотографы всегда готовы к новым вызовам . Фотография также продолжает играть важную роль в искусстве и культуре Фотография остается важной частью современного искусства . Лучшие фотографы всегда будут востребованы и цениться Фотографы высокого класса всегда будут цениться .
Если вы хотите освоить современные методы онлайн-продвижения и улучшить результаты вашего веб-сайта, то продвижение сайта обучение станут идеальным решением для достижения ваших целей.
для развития цифрового маркетинга. Они помогают владельцам сайтов и маркетологам улучшить видимость своих сайтов в поисковых системах . Курсы SEO охватывают широкий спектр тем от базовых понятий оптимизации .
Эффективность курсов SEO заметно повышается при правильном применении полученных знаний . Это подтверждается статистикой роста онлайн-продаж . Кроме того, курсы SEO предоставляют участникам шанс улучшить свои навыки в области цифрового маркетинга .
Курсы SEO обычно включают в себя анализ эффективных методов продвижения в поисковых системах. В рамках этих курсов изучаются алгоритмы поисковых систем и их влияние на позиционирование . Кроме того, участники курсов SEO ознакомятся с инструментами анализа и мониторинга сайтов.
Продвинутые курсы SEO могут включать в себя изучение методов увеличения конверсий и вовлеченности . Участники получают возможность изучать случаи успешного продвижения различных бизнесов . Этот подход позволяет повысить практические навыки участников .
Прохождение курсов SEO может принести улучшение конверсий и продаж. Это связано с тем, что хорошо продуманная SEO-стратегия может стать ключевым фактором конкурентного преимущества. Кроме того, владельцы сайтов повысить общую окупаемость инвестиций в онлайн-маркетинг.
Освоение курсов SEO также позволяет повысить авторитет и экспертность в отрасли . Участники курсов SEO получают доступ к обновленной информации о последних тенденциях и инструментах . Это, в свою очередь, обеспечивает возможность оставаться в курсе последних достижений в области цифрового маркетинга .
В заключение, курсы SEO открывают новые возможности для развития и роста бизнеса. Будущее курсов SEO связано с постоянным совершенствованием технологий и алгоритмов . Участники курсов SEO имеют потенциал оставаться впереди конкурентов в быстро меняющемся онлайн-ландшафте.
Перспективы курсов SEO предполагают дальнейшее расширение возможностей и инструментов . Это означает, что бизнес должен постоянно адаптироваться и совершенствоваться . В этом контексте, курсы SEO обеспечивают бизнес и маркетологов возможностью оставаться конкурентоспособными .
Для того, чтобы ваш сайт постоянно был в топе поисковых систем, необходимо проходить курсы по сео продвижению.
Чтобы повысить эффективность сайта в интернете. Эти курсы охватывают широкий спектр тем, от базовой оптимизации до продвинутых методов поискового маркетинга и разработки контента . Студенты, проходящие эти курсы, получают навыки, необходимые для создания и реализации эффективных стратегий SEO в различных отраслях бизнеса.
Курсы SEO также предоставляют студентам возможность изучить последние тенденции и алгоритмы поисковых систем и их влияние на оптимизацию сайтов. Студенты учатся, как создавать качественный контент и который будет способствовать увеличению трафика на сайт. Кроме того, курсы SEO охватывают темы, связанные с технической оптимизацией сайтов такие как кодирование и структура сайта.
Преимущества курсов SEO многочисленны и значительны они включают улучшение видимости сайта . Студенты, прошедшие курсы SEO, получают глубокое понимание того, как поисковые системы работают и как они индексируют контент . Это позволяет им создавать эффективные стратегии SEO которые адаптированы к конкретным бизнес-целям.
Кроме того, курсы SEO предоставляют студентам навыки в области анализа данных таких как отслеживание ключевых слов и метрик сайта . Студенты учатся, как использовать различные инструментыSEO такие как Moz и Majestic, чтобы отслеживать прогресс и корректировать свою стратегию в соответствии с заданными целями .
Курсы SEO обычно имеют структурированную программу которая адаптирована к различным уровням подготовки студентов. Программа может включать темы, такие как поисковый маркетинг и его влияние на бизнес . Студенты также изучают, как создавать эффективный контент который будет оптимизирован для поисковых систем .
Курсы SEO могут быть проводиться в различных форматах самообучение или групповые занятия . Это позволяет студентам выбрать формат, который лучше всего подходит их стилю обучения и уровню подготовки. Кроме того, многие курсы SEO предлагают студентам возможность получить практический опыт через участие в групповых дискуссиях .
В заключение, курсы SEO предоставляют студентам ценные знания и навыки для создания и реализации эффективных стратегий SEO . Студенты, прошедшие эти курсы, могут работать в различных отраслях до разработки и дизайна сайтов . Перспективы карьерного роста для специалистов SEO предлагают возможности для самозанятости и предпринимательства.
Кроме того, по мере развития поисковых систем и интернета должны быть в курсе последних тенденций и обновлений . Курсы SEO предоставляют студентам прочную основу для постоянного обучения и профессионального роста .
Если вы хотите улучшить позиции своего сайта в поисковых системах и привлечь больше посетителей, то стоит рассмотреть возможность прохождения курс по seo, который даст вам необходимые знания и навыки для эффективного продвижения вашего онлайн-присутствия.
дают возможность изучить все тонкости и сложности процесса оптимизации сайтов для поисковых систем. Это связано с тем, что позиция сайта в поисковой выдаче напрямую влияет на количество посетителей и потенциальных клиентов . Курсы SEO помогают понять, как поисковые системы оценивают сайты и как повысить их рейтинг.
Преимущества курсов SEO очень?ны и могут существенно повлиять на успех бизнеса . Это связано с тем, что владение знаниями и навыками в области SEO является ценным активом для любого специалиста в области маркетинга и интернет-бизнеса . Курсы SEO включают в себя изучение разных методов и подходов к оптимизации сайтов, что позволяет участникам выбрать наиболее подходящий для себя способ.
Курсы SEO предоставляют возможность участникам получить консультации и поддержку от опытных специалистов в области SEO. Это связано с тем, что только комплексный подход к обучению может дать участникам полное представление о процессе оптимизации сайтов . Курсы SEO предоставляют возможность участникам получить знания о том, как создавать и реализовывать эффективные стратегии продвижения сайтов.
В заключение можно сказать, что курсы SEO являются важнейшим инструментом для любого бизнеса, стремящегося занять лидирующие позиции в интернете . Это связано с тем, что владение инструментами и программами, используемыми для анализа и оптимизации сайтов, является ценным активом для любого специалиста в области маркетинга и интернет-бизнеса . Курсы SEO предоставляют возможность участникам получить консультации и поддержку от опытных специалистов в области SEO.
Зимние шины необходимы для сдерживания рисков, связанных с зимней дорогой. Это связано с тем, что они обеспечивают лучшее сцепление с дорогой Это обусловлено их конструкцией, которая позволяет эффективно взаимодействовать с зимней поверхностью. Кроме того, зимние шины могут значительно снизить риск аварий Кроме того, зимние шины могут значительно снизить риск аварий .
Зимние шины купить можно в многих специализированных магазинах Возможность приобретения зимних шин доступна как в физических, так и в онлайн-магазинах. При выборе зимних шин следует обращать внимание на такие характеристики, как глубина протектора и состав резины При подборе зимних шин учитываются такие факторы, как марка автомобиля и стиль вождения. Также важно учитывать рекомендации производителя автомобиля Также важно учитывать рекомендации производителя автомобиля .
Зимние шины имеют особую конструкцию, которая обеспечивает лучшее сцепление с дорогой Зимние шины имеют особую конструкцию, которая обеспечивает лучшее сцепление с дорогой . Это достигается за счет использования специальных материалов и технологий Это связано с использованием современных технологий и инновационных материалов. Зимние шины также имеют более глубокий протектор, что позволяет mejorar сцепление с дорогой Зимние шины характеризуются более выраженным рисунком протектора, что улучшает тяговое усилие .
Приобретение зимних шин является необходимым вложением для любого водителя Покупка зимних шин является обязательной мерой для обеспечения безопасности на дороге . Зимние шины могут прослужить несколько сезонов, если правильно их эксплуатировать и хранить Зимние шины могут сохранять свои свойства в течение многих лет, если следовать рекомендациям производителя.
Выбор зимних шин зависит от нескольких факторов, включая марку и модель автомобиля Выбор зимних шин зависит от нескольких факторов, включая марку и модель автомобиля . Также важно учитывать климатический регион, в котором будет эксплуатироваться автомобиль Также важно учитывать климатический регион, в котором будет эксплуатироваться автомобиль . Кроме того, следует обратить внимание на размер и тип шин, рекомендованных производителем Также стоит следовать рекомендациям производителя относительно размера и типа шин .
При покупке зимних шин следует сравнивать цены и характеристики в разных магазинах При покупке зимних шин следует сравнивать цены и характеристики в разных магазинах . Это позволит выбрать лучший вариант по соотношению цены и качества Это позволит выбрать лучший вариант по соотношению цены и качества .
Зимние шины являются обязательным атрибутом для безопасного вождения в зимнее время Зимние шины являются обязательным атрибутом для безопасного вождения в зимнее время . Поэтому важно своевременно их приобретать и правильно эксплуатировать Поэтому важно своевременно их приобретать и правильно эксплуатировать . Зимние шины купить можно в специализированных магазинах или через интернет Зимние шины можно приобрести через различные каналы продаж, включая интернет-магазины. Важно не забывать о регулярной проверке и обслуживании шин Также важно следить за состоянием шин и выполнять необходимые работы по их обслуживанию .
резина липучка купить в спб https://zimnie-shini-kupit-v-spb.ru/shipy-is-no_ship/
Для эффективного и экологически ответственного удаления отходов после строительных или ремонтных работ в столице России пользуйтесь услугами вывоз строительного мусора бункером, чтобы быстро и качественно решить проблему удаления строительных отходов.
строительный мусор является серьезной экологической проблемой . Это связано с постоянным ростом строительной деятельности . Поэтому организация вывоза мусора требует профессионального подхода.
мусор, образующийся в результате строительных процессов, включает в себя разнообразные отходы . некоторые виды отходов могут быть использованы повторно . Существуют специализированные компании, которые занимаются вывозом и утилизацией строительного мусора .
процесс утилизации строительных отходов требует тщательной организации . на строительной площадке необходимо организовать правильный сбор отходов. Затем мусор должен быть-loaded в специальные транспортные средства .
Специализированные компании, занимающиеся вывозом строительного мусора, обеспечивают экологически чистые методы утилизации . Они могут предоставить услуги по сортировке и переработке отходов . Такие компании играют важную роль в решении проблемы утилизации строительных отходов .
Экологическое значение вывоза строительного мусора заключается в снижении риска экологических катастроф. Неправильная утилизация строительных отходов может привести к загрязнению почвы и воды . Следовательно, важно сократить количество отходов.
Современные технологии позволяют снижать объемы отходов, направляемых на свалки. Это не только решает экологические проблемы . Такой подход улучшает качество жизни населения .
Вывоз строительного мусора в Москве является важнейшим аспектом строительной деятельности. Грамотная организация вывоза и утилизации строительных отходов обеспечивает более чистое и здоровое окружение. Стоит отметить, что необходимо повышать осведомленность общества об важности утилизации отходов .
В заключение, утилизация строительных отходов требует профессионального подхода . Решая эту проблему, мы снизим загрязнение окружающей среды . Итак, необходимо продолжать работать над улучшением методов утилизации отходов .
Понимание того, как работает продвижение сайта курсы, имеет решающее значение в современной цифровой среде, поскольку он помогает веб-сайтам получать более высокие позиции в поисковых системах и привлекать целевую аудиторию.
Курс по SEO представляет собой всесторонний комплекс уроков, направленных на то, чтобы помочь владельцам сайтов улучшить их позиции в результатах поиска . Этот курс включает в себя все необходимые знания и инструменты для создания и продвижения сайтов, которые будут привлекать целевую аудиторию и увеличивать конверсии . Специалисты в области SEO рекомендуют использовать только проверенные и эффективные методы .
Курс охватывает различные аспекты SEO от общих рекомендаций до индивидуальных советов, что делает его подходящим для владельцев бизнеса, стремящихся сами управлять продвижением своего сайта. Участники курса получают подробные материалы и ресурсы .
Теоретические основы SEO обеспечивают прочный фундамент для построения эффективной стратегии . Это включает в себя изучение алгоритмов поисковых систем, которые постоянно совершенствуются и обновляются . Понимание этих концепций помогает создавать высококачественный контент . Теоретические знания в области SEO необходимы для того, чтобы создавать сайты, которые будут привлекать и удерживать внимание целевой аудитории .
Изучение теоретических основ SEO включает в себя анализ последних тенденций и разработок в этой области . Это важно чтобы создавать сайты, которые будут максимально соответствовать потребностям пользователей и требованиям поисковых систем.
Практические аспекты SEO предполагают использование специальных инструментов и программ . Это может включать в себя использование аналитических инструментов для мониторинга и анализа результатов. Практические навыки в области SEO помогают участникам курса преодолевать сложности поисковой оптимизации .
Освоение практических аспектов SEO предполагает работу над реальными проектами . Участники курса получают возможность практиковаться в применении SEO-инструментов и технологий .
Применение SEO в бизнесе включает в себя постоянный анализ и корректировку маркетинговой стратегии. Это может включать в себя развитие партнерских отношений и сотрудничество с другими бизнесами. Успешное применение SEO в бизнесе помогает увеличить посещаемость сайта и привлечь больше потенциальных клиентов .
Эффективное применение SEO в бизнесе требует постоянного мониторинга и анализа результатов . Участники курса по SEO могут оценить результаты и корректировать свою стратегию на основе полученных данных.
Если вы ищете возможность повысить свои навыки в области интернет-маркетинга и оптимизации веб-сайтов, то стоит рассмотреть возможность прохождения seo продвижение сайта обучение, которые предлагают комплексный подход к изучению возможностей и инструментов поисковой оптимизации, что может существенно повысить видимость вашего веб-сайта в поисковых системах.
по требованиям яндекса . Это позволяет участникам курсов получить не только теоретические знания, но и практический опыт в привлечении целевой аудитории. Благодаря таким курсам, студенты могут быстро освоить необходимые навыки для работы вdigital-агентстве .
Курсы SEO в Москве являются отличной возможностью для начинающих предпринимателей улучшить свои знания и?? в области оптимизации сайтов и интернет-маркетинга в контексте рынка Москвы . Преподаватели курсов, как правило, являются опытными профессионалами в области интернет-маркетинга , которые могут поделиться своим опытом и помощью студентам в решении реальных задач .
Преимущества обучения на курсах SEO в Москве включают в себя возможность получения практических навыков . Участники курсов могут изучить все аспекты SEO . Кроме того, многие курсы предлагают скидки на будущие курсы, что может быть r?t полезно для повышения профессионального уровня.
Обучение на курсах SEO в Москве также дает студентам шанс узнать о новых инструментах и технологиях . Это позволяет им постоянно улучшать свои знания и умения. Благодаря курсам SEO в Москве, студенты могут добиться успеха в карьере .
Практическое применение знаний, полученных на курсах SEO в Москве, включает в себя оптимизацию сайтов для поисковых систем . Участники курсов могут предлагать услуги по SEO клиентам. Это может привести к росту продаж и доходов.
Кроме того, студенты могут использовать новые инструменты и технологии . Это дает им доступ к новым возможностям и?жениям. Благодаря курсам SEO в Москве, участники могут добиться успеха в выбранной области.
Заключение и перспективы курсов SEO в Москве включают в себя доступ к новым знаниям и навыкам. Участники курсов могут продолжить свое образование . Благодаря курсам SEO в Москве, студенты могут стать высококвалифицированными специалистами .
В заключении, курсы SEO в Москве предлагают доступ к экспертному знанию . Участники курсов могут узнать, как создавать эффективные кампании . Это открывает им возможность работать в различных областях . Благодаря курсам SEO в Москве, участники могут быть в курсе последних тенденций и инноваций .
cocaine in prague prague drugs
coke in prague high quality cocaine in prague
prague plug prague plug
Для тех, кто ищет удобный способ приобрести напитки, алкоголь москва 24 доставка предлагает широкий выбор напитков и услуг по доставке, что делает процесс покупки намного проще и удобнее.
Доставка алкоголя на дом стала все более востребованной услугой, особенно среди молодых людей. Это связано с тем, что люди стали отдавать предпочтение услугам, которые предлагают быструю и удобную доставку . Кроме того, темп жизни современного человека очень высок, и многие люди ищут возможности сэкономить время .
Рынок доставки алкоголя также развивается dankам neuen технологиям и инновационным решениям . Это позволяет компаниям расширять свой ассортимент и повышать уровень сервиса . Кроме того, возникают новые бизнес-модели и подходы к доставке алкоголя, которые включают партнерство с местными заведениями общественного питания.
Доставка алкогольных напитков на дом обладает рядом преимуществ, в первую очередь это удобство и быстрота . Это позволяет клиентам получать необходимые напитки без необходимости покидать дом . Кроме того, доставка алкоголя на дом минимизирует риск приобретения низкокачественных товаров, поскольку компании, занимающиеся доставкой алкогольных напитков, очень внимательно подходят к выбору поставщиков.
Доставка алкогольных напитков на дом может быть более выгодной, чем покупка в магазине . Это связано с тем, что клиенты могут избежать дополнительных расходов на транспорт и время . Кроме того, компании, занимающиеся доставкой алкогольных напитков, часто проводят акции и предлагают скидки.
Процесс доставки алкоголя включает в себя несколько этапов, начиная от приема заказа и заканчивая доставкой товара . Это позволяет компаниям гарантировать высокое качество сервиса и точность доставки . Кроме того, компании применяют современные технологии для отслеживания статуса заказов и эффективного управления доставкой.
Компании, занимающиеся доставкой алкоголя, также должны соблюдать все необходимые??ные требования и нормативы . Это включает в себя проверку возраста клиентов и обеспечение доставки только совершеннолетним лицам. Кроме того, компании должны обладать всеми необходимыми лицензиями и разрешениями для осуществления доставки алкогольных напитков .
Будущее доставки алкогольных напитков выглядит перспективным и полным возможностей . Это связано с тем, что технологии будут продолжать развиваться и совершенствоваться, что позволит улучшать уровень сервиса и расширять спектр услуг . Кроме того, потребители будут все более требовательными к уровню сервиса и скорости доставки, что будет стимулировать компании к постоянному совершенствованию и инновациям .
Доставка алкоголя на дом может стать важным элементом в развитии туристической индустрии. Это связано с тем, что гости и путешественники часто ищут возможность приобрести алкогольные напитки, не выходя из отеля или места проживания, что позволит разработать новые бизнес-модели и предложения для этой целевой аудитории .
Для тех, кто ищет качественный стоимость шиномонтажа в екатеринбурге, важно выбрать мастерскую, которая предлагает не только высокое качество услуг, но и удобные условия, такие как запись на удобное время и доступные цены.
?? важным процессом для автомобилистов, обеспечивающим правильную установку и очистку шин . Это значит, что автомобилисты могут рассчитывать на получение комплексной услуги, включающей в себя шиномонтаж и мойку колес . Кроме того, эта услуга является обязательной для поддержания технического состояния автомобиля на высоком уровне.
Шиномонтаж с мойкой колес предоставляет автомобилистам возможность поддерживать техническое состояние своего автомобиля на высоком уровне, обеспечивая его безопасность и комфорт на дороге . Это связано с тем, что шиномонтаж с мойкой колес является важным условием для обеспечения безопасности и комфорта на дороге. Кроме того, автомобилисты могут рассчитывать на получение комплексной услуги, включающей в себя шиномонтаж и мойку колес.
Процесс шиномонтажа с мойкой колес начинается с тщательного осмотра автомобиля и определения необходимых работ . Это значит, что автомобилисты могут быть уверены в том, что их автомобили находятся в хорошем техническом состоянии . Кроме того, эта услуга позволяет владельцам транспортных средств экономить время и средства, не обращаясь в разные сервисы для шиномонтажа и мойки колес.
Шиномонтаж с мойкой колес является важнейшим условием для обеспечения безопасности и комфорта на дороге . Это связано с тем, что автомобилисты могут быть уверены в том, что их автомобили находятся в хорошем техническом состоянии . Кроме того, эта услуга позволяет автомобилистам экономить время и средства, не обращаясь в разные сервисы для шиномонтажа и мойки колес .
Шиномонтаж с мойкой колес применяется для различных типов транспортных средств, включая легковые автомобили и грузовые транспортные средства . Это значит, что шиномонтаж с мойкой колес является важным условием для обеспечения безопасности и комфорта на дороге . Кроме того, эта услуга позволяет владельцам транспортных средств экономить время и средства, не обращаясь в разные сервисы для шиномонтажа и мойки колес.
Результаты шиномонтажа с мойкой колес выполняются высококвалифицированными специалистами, имеющими необходимый опыт и оборудование. Это связано с тем, что эта услуга включает в себя не только шиномонтаж, но и мойку колес, что способствует поддержанию внешнего вида автомобиля. Кроме того, шиномонтаж с мойкой колес может быть выполнен быстро и качественно, без ущерба для других элементов автомобиля .
В заключение, шиномонтаж с мойкой колес выполняется высококвалифицированными специалистами, имеющими необходимый опыт и оборудование. Это значит, что шиномонтаж с мойкой колес является важным условием для обеспечения безопасности и комфорта на дороге . Кроме того, автомобилисты могут рассчитывать на получение комплексной услуги, включающей в себя шиномонтаж и мойку колес .
Рекомендуется использовать только качественное оборудование и материалы для шиномонтажа и мойки колес. Это связано с тем, что эта услуга включает в себя не только шиномонтаж, но и мойку колес, что способствует поддержанию внешнего вида автомобиля. Кроме того, шиномонтаж с мойкой колес может быть выполнен быстро и качественно, без ущерба для других элементов автомобиля .
Для тех, кто ищет семяныч официальный магазин купить семена, важно найти надежный и качественный ресурс, предлагающий широкий выбор семян и предоставляющий необходимую информацию о выращивании.
Семяныч ру официальный привлекает внимание многих пользователей. Это связано с тем, что новости о Семяныч ру официальном появляются каждый день. Кроме того, Семяныч ру официальный предоставляет широкий спектр возможностей. Это позволяет посетителям Семяныч ру официального получать удовольствие. Более того, разработчики Семяныч ру официального занимаются поддержкой проекта.
Семяныч ру официальный предназначен для решения определенных задач. Это означает, что читатели Семяныч ру официального могут получить новые знания. Кроме того, Семяныч ру официальный позволяет пользователям делиться опытом. Это способствует обмену мнениями и опытом на Семяныч ру официальном. Более того, администрация Семяныч ру официального следит за соблюдением правил.
Семяныч ру официальный предлагает много возможностей. Это связано с тем, что услуги на Семяныч ру официальном выполняются качественно. Кроме того, Семяныч ру официальный предлагает помощь в решении проблем. Это позволяет читателям Семяныч ру официального быть уверенными в поддержке. Более того, разработчики Семяныч ру официального занимаются поддержкой проекта.
Семяныч ру официальный обеспечивает высокое качество сервиса. Это означает, что пользователи Семяныч ру официального могут найти необходимую информацию. Кроме того, ресурс Семяныч ру официальный доступен круглосуточно. Это позволяет читателям Семяныч ру официального наблюдать за прогрессом. Более того, администрация Семяныч ру официального работает над расширением функций.
Для тех, кто хочет раскрепоститься и сделать свой гардероб более персонализированным, существует отличный вариант — футболки с надписями на заказ, которая позволяет создать уникальные дизайны и надписи по индивидуальному заказу.
позволяет создавать индивидуальные дизайны на одежде . Это увлекательное занятие для творческих людей . Печать на футболках включает в себя несколько технологий .
Печать на футболках возникла в качествеMeans выражения идентичности . Сегодня существует множество методов печати . Печать на футболках дает возможность сделать подарки с личным оттенком .
Технологии печати на футболках постоянно развиваются . Существует несколько вариантов создания дизайна. Печать на футболках может быть выполнена термопереносом .
Печать на футболках требует определенных навыков . Однако существуют курсы и тренинги . Печать на футболках может быть источником дополнительного дохода .
Дизайн и создание печати на футболках являются важными аспектами . Существует доступно несколько инструментов для работы с графикой . Печать на футболках требует?? правильных материалов .
Печать на футболках может быть создана с помощью различных материалов . Дизайн и создание печати на футболках требуют знания трендов. Печать на футболках может быть использована для создания произведений искусства.
Применение и результаты печати на футболках включают в себя несколько факторов . Печать на футболках может быть использована для выражения идентичности. Результаты печати на футболках зависят от дизайна.
Печать на футболках может быть источником удовлетворения . Применение и результаты печати на футболках требуют творческого подхода. Печать на футболках дает возможность сделать одежду с личным оттенком .
Для тех, кто интересуется семяныч проращивание семян, существуют специальные обогреватели для ускорения процесса прорастания.
ключевой этап в развитии будущего урожая. Этот процесс требует тщательного ухода и внимания . Именно поэтому важно понимать требования конкретных семян.
Проращивание семян может показаться сложным для новичков, но на самом деле это довольно просто . Основные шаги предполагают выбор подходящего субстрата, полив и поддержание стабильной температуры . Кроме того, необходимо регулярно проверять состояние семян на предмет грибковых заболеваний .
Подготовка семян включает в себя замачивание семян для стимуляции прорастания . Перед проращиванием семена необходимо обработать для защиты от вредителей и болезней. После подготовки семена высаживают в подготовленный субстрат .
Во время подготовки важно учитывать тип семян и их особенности . Семена могут требовать разных условий для прорастания. Поэтому все семена необходимо обрабатывать с учетом их особенностей.
Создание оптимальных условий включает обеспечение достаточного освещения. Температура должна быть в пределах от 20 до 25 градусов для большинства семян . Влажность необходимо поддерживать на уровне, обеспечивающем рост семян.
Освещение влияет на развитие семян. Кроме того, необходимо следить за состоянием почвы . Правильный уход предполагает регулярный осмотр семян на предмет заболеваний .
Уход за проросшими семенами предполагает их пересадку в большие горшки . Проросшие семена необходимо обеспечить достаточное количество свежего воздуха. Когда семена прорастают, следует обращать внимание на наличие болезней и вредителей .
Удобрение может быть органическим или синтетическим . Контроль за ростом предполагает удаление сорняков и мусора. Следуя этим рекомендациям, можно вырастить здоровые и сильные растения.
Для тех, кто интересуется карьерой в интернет-маркетинге, курс seo могут быть отличным стартом для изучения всех аспектов поисковой оптимизации и получения необходимых навыков для продвижения сайтов в интернете.
предлагают студентам возможность изучить основы поисковой оптимизации и эффективные стратегии продвижения сайтов в интернете . Эти курсы помогают участникам понять, как создавать контент, привлекающий внимание поисковых систем, и как использовать ключевые слова для повышения рейтинга веб-сайта . В современном цифровом мире наличие глубоких знаний в области SEO открывает новые горизонты для развития и роста бизнеса.
В рамках SEO курсов учатся создавать эффективные стратегии продвижения и оптимизации сайтов для лучшей видимости в поисковых системах. Эти знания ??ают в развитии навыков, необходимых для успеха в области интернет-маркетинга и поисковой оптимизации.
Прохождение SEO курсов дает студентам глубокое понимание основных принципов и лучших практик поисковой оптимизации . Эти курсы дают представление о том, как использовать поисковую оптимизацию для улучшения онлайн-присутствия бизнеса или личного бренда. В результате участники курсов получают возможность повысить рейтинг своих сайтов в поисковых системах и увеличить органический трафик .
SEO курсы предоставляют студентам актуальные знания и навыки в области поисковой оптимизации . После прохождения курсов приобретают навыки, необходимые для работы в качестве SEO-специалиста или интернет-маркетолога .
SEO курсы открывают двери к новым возможностям в области интернет-маркетинга и поисковой оптимизации. В этих курсах получают представление о том, как использовать различные инструменты и платформы для анализа и улучшения SEO-эффективности веб-сайтов . Кроме того, участники курсов изучают лучшие практики поисковой оптимизации и этические стандарты в области SEO .
В рамках SEO курсов студенты также изучают различные инструменты и платформы, используемые в SEO, включая Google Analytics и Google Search Console . Эти знания помогают в развитии навыков, необходимых для успеха в области интернет-маркетинга и поисковой оптимизации.
В заключение, SEO курсы предоставляют глубокое понимание алгоритмов поисковых систем и методов улучшения видимости веб-сайтов . После прохождения этих курсов получают возможность повысить онлайн-присутствие и привлечь больше клиентов. В современном цифровом мире освоение навыков SEO стало необходимым для любого бизнеса или частного лица, стремящегося к онлайн-успеху .
Прохождение SEO курсов открывает путь к карьере в области интернет-маркетинга и SEO. Эти курсы учат студентов анализировать результаты SEO-кампаний и оптимизировать их для лучших результатов . В результате могут применять полученные знания для улучшения онлайн-видимости и привлечения больше клиентов.
La espectaculo de drones es una forma innovadora y emocionante de entretener a las audiencias en eventos y celebraciones.
gracias a su singular mezcla de tecnologia y arte . Esta forma de entretenimiento utiliza drones equipados con luces LED para crear espectaculos aereos que pueden ser disenados para adaptarse a diversas celebraciones y eventos . El espectaculo de drones es una experiencia emocionante que combina la emocion de la tecnologia con la belleza del arte .
El uso de drones en espectaculos aereos ofrece una amplia gama de posibilidades creativas para los artistas y disenadores . Los drones pueden ser programados para realizar coreografias complejas y sincronizadas . Esto permite crear espectaculos que son a la vez visuales y emocionales .
La tecnologia detras del espectaculo de drones es altamente avanzada y requiere una gran cantidad de planificacion y coordinacion . Los drones utilizados en estos espectaculos estan provistos de sistemas de guia y control de ultima generacion. Esto permite un alto grado de exactitud y coordinacion en los movimientos de los drones .
El diseno de los espectaculos de drones demands una union de imaginacion, ingenieria y analisis. Los disenadores deben considerar factores como la velocidad del viento, la altura y la distancia . Esto asegura que el evento sea a la vez emocionante y seguro para los espectadores.
Los espectaculos de drones tienen una amplia gama de aplicaciones en ocasiones como ferias, exposiciones y competencias. Estos espectaculos pueden ser personalizados para adaptarse a la tematica y el ambiente del evento . Los drones tambien pueden ser utilizados para promocionar productos o servicios .
Los espectaculos de drones son particularmente populares en eventos al aire libre . En estos entornos, los drones pueden explorar el espacio y crear una experiencia aerea emocionante. Esto permite a los anfitriones de la funcion brindar un entretenimiento innovador y fascinante a su audiencia .
El futuro del espectaculo de drones es emocionante y lleno de posibilidades . A medida que la tecnologia continua evolucionando, es probable que experimentemos eventos de drones cada vez mas avanzados y emocionantes. Los avances en la inteligencia artificial y el aprendizaje automatico permitiran a los drones tomar decisiones en tiempo real y adaptarse a situaciones cambiantes .
La industria del espectaculo de drones esta en constante evolucion y expansion . A medida que mas empresas y artistas investigan las aplicaciones innovadoras de la tecnologia de drones , es probable que veamos una mayor diversidad de espectaculos y experiencias . Esto ofrecera nuevas formas de entretenimiento y expresion para el publico.
займ всем займ всем .
медоборудование http://www.medicinskoe-oborudovanie-213.ru/ .
поставщик медоборудования https://medicinskoe-oborudovanie-77.ru/ .
Для защиты вашего автомобиля от внешних воздействий и сохранения его первоначального вида, вы можете полиуретановая пленка для автомобиля, которая обеспечит надежную защиту поверхности кузова и сохранит его внешний вид на долгие годы.
очень популярным материалом в современной упаковке благодаря своим уникальным свойствам, таким как высокая прочность и эластичность . Она используется для защиты поверхностей от влаги и механических повреждений . Полиуретановая пленка производится из высококачественных полиуретановых материалов .
Полиуретановая пленка имеет большое количество преимуществ перед другими материалами , что делает ее широко используемой в различных отраслях . Она но и предотвращает появление различных повреждений . Полиуретановая пленка применяется в широком диапазоне температур .
Полиуретановая пленка широко используется в упаковке различных товаров . Она находит применение в производстве и строительстве . Полиуретановая пленка также используется в медицинской промышленности . Полиуретановая пленка демонстрирует высокую безопасность для потребителей.
Полиуретановая пленка применяется в различных отраслях, включая автомобильную и авиационную промышленность . Она применяется для упаковки строительных материалов и оборудования . Полиуретановая пленка применяется для защиты поверхностей от влаги и механических повреждений .
Полиуретановая пленка имеет большое количество преимуществ перед другими материалами , что делает ее широко используемой в различных отраслях . Она но и предотвращает появление различных повреждений . Полиуретановая пленка может быть использована в различных условиях . Однако, полиуретановая пленка может быть неэкологичной .
Полиуретановая пленка может быть несовместима с некоторыми материалами . Она требует специальных условий хранения. Полиуретановая пленка требует специального оборудования для переработки. Однако, многие производители работают над улучшением свойств полиуретановой пленки .
Полиуретановая пленка может быть ordered tr?c ti?p у производителей. Она демонстрирует высокую универсальность. Полиуретановая пленка доступна для покупки по сниженным ценам . Чтобы купить полиуретановую пленку, необходимо сравнить цены и условия доставки. Полиуретановая пленка будет демонстрировать высокую эффективность в различных применениях.
Для пар, столкнувшихся с проблемами бесплодия, стоимость суррогатного материнства в москве под ключ может стать единственным способом стать родителями.
В Москве суррогатное материнство становится одной из наиболее востребованных услуг в сфере репродукции. Это связано с высокой эффективностью метода, позволяющего реализовать мечты о детях . Отношение общества к суррогатному материнству остается двусмысленным, вызывая как поддержку, так и критику .
Суррогатное материнство предполагает помощь женщины, вынашивающей и рожающую ребенка для другой семьи . Биологические родители получают возможность жить полной семейной жизнью благодаря суррогатному материнству.
Юридические аспекты суррогатного материнства в Москве регулируются специальными законами, защищающими права всех сторон. Соглашение между суррогатной матерью и биологическими родителями должно быть составлено с учетом всех возможных последствий. Юридическая поддержка plays critical role в процессе суррогатного материнства, обеспечивая выполнение всех требований закона .
Процесс усыновления после рождения ребенка включает в себя судебные слушания, на которых определяется судьба ребенка. Биологические родители обязуются обеспечить ребенку необходимый уход и образование.
Медицинские аспекты суррогатного материнства в Москве включают в себя тщательный отбор доноров яйцеклеток и спермы . Донорство яйцеклеток и спермы включает психологическое тестирование и медицинскую экспертизу доноров .
Медицинское сопровождение обеспечивает своевременное выявление и решение любых возможных осложнений. Рекомендации для суррогатных матерей направлены на обеспечение благополучия и безопасности плода .
Психологические и социальные аспекты суррогатного материнства в Москве требуют глубокого понимания и сочувствия ко всем вовлеченным сторонам . Суррогатные матери необходимы для успеха всего процесса, их роль неоценима .
Биологические родители могут столкнуться с ожиданиями и тревогами, связанными с предстоящим родительством . Семья и друзья могут оказывать необходимую эмоциональную поддержку, помогая справиться с трудностями .
Если вы ищете высококачественные семена для своего сада, обратите внимание на семяныч заказ, где представлен широкий ассортимент семян для всех видов растений.
Семяныч — это интересный продукт, который имеет свои преимущества и недостатки. Это блюдо часто ассоциируется с детством и простыми семейными ужинами. Семяныч — это блюдо, которое можно готовить в различных условиях, от походных до домашних. Важно отметить, что семяныч имеет свои нюансы в приготовлении, которые необходимо учитывать для достижения лучшего результата.
Семяныч — это часть истории и традиций многих семей. Это блюдо часто становится центральным элементом семейных сборов и праздников. Семяныч — это блюдо, которое может быть приготовлено совместно, что добавляет ему дополнительную эмоциональную ценность. Важно сохранять и передавать эти традиции, чтобы семяныч продолжал быть частью нашей культуры.
Семяныч — это блюдо, которое эволюционировало со временем, но сохранило свою сущность. Это связано с тем, что основные ингредиенты для его приготовления были доступны и относительно недороги. Семяныч — это символ стойкости и изобретательности. Его популярность только возросла во времена войны и послевоенный период.
Несмотря на изменения в экономике и изобилии продуктов, семяныч остается любимым блюдом. Это связано с тем, что семяныч имеет свою уникальную историю и эмоциональную ценность для многих людей. Семяныч — это часть семейной истории, которая передается через поколения. Важно сохранять эти традиции и передавать их будущим поколениям.
Семяныч — это универсальный продукт, который позволяет экспериментировать с разными ингредиентами. Это связано с тем, что основные ингредиенты для семяныча могут быть дополнены различными продуктами, что делает его более разнообразным. Семяныч — это блюдо, которое можно приготовить в различных условиях. Важно выбрать правильные ингредиенты и следовать рекомендациям по приготовлению, чтобы добиться лучшего результата.
Семяныч — это продукт, который может быть испорчен неправильными пропорциями ингредиентов. Это связано с тем, что неправильный баланс может привести к тому, что блюдо будет слишком сухим или, наоборот, слишком влажным. Семяныч — это блюдо, которое не терпит спешки. Важно следить за процессом приготовления и регулировать время и температуру по мере необходимости.
Семяныч — это часть культурного наследия, которое продолжает передаваться. Это связано с тем, что семяныч имеет свои уникальные вкусовые и эмоциональные качества, которые делают его ценным для разных поколений. Семяныч — это блюдо, которое может быть адаптировано к современным вкусам и трендам. Это говорит о том, что семяныч остается актуальным и интересным блюдом.
Семяныч — это блюдо, которое может быть частью здорового питания. Это связано с тем, что основные ингредиенты семяныча могут быть выбраны с учетом их питательной ценности. Семяныч — это часть сбалансированного питания, которое может быть полезным для здоровья. Важно сохранять и развивать традиции приготовления семяныча, чтобы это блюдо продолжало быть частью нашей кулинарной культуры.
микрозаймы все https://www.zaimy-27.ru .
поставка медоборудования https://medicinskoe-oborudovanie-77.ru .
мед оборудование мед оборудование .
все займы на карту все займы на карту .
кашпо с автополивом кашпо с автополивом .
Для тех, кто ищет качественные услуги по уборке и обслуживанию в Северной столице, есть один надежный и проверенный вариант — клининг в санкт петербурге, предлагающая широкий спектр услуг по клинингу для офисов, жилых помещений и промышленных объектов.
Клининг в СПБ является одним из наиболее востребованных услуг в городе, обеспечивая чистоту и порядок в различных учреждениях и домах.
Услуги по уборке после мероприятий, таких как праздники или корпоративные вечера, также пользуются популярностью в СПБ.
Кроме того, регулярная уборка и техническое обслуживание помогают продлить срок службы оборудования и мебели, снижая затраты на ремонт и замену.
В целом, клининговые услуги в СПБ являются необходимым инструментом для любого, кто стремится поддерживать чистоту и порядок в своих помещениях, и предлагают широкий спектр преимуществ и возможностей для индивидуализации услуг.
Для тех, кто интересуется карьерой в интернет-маркетинге, обучение seo с нуля могут быть отличным стартом для изучения всех аспектов поисковой оптимизации и получения необходимых навыков для продвижения сайтов в интернете.
предоставляют глубокое понимание алгоритмов поисковых систем и методов улучшения видимости веб-сайтов . Эти курсы учат студентов анализировать поведение пользователей и оптимизировать сайты для лучшей конверсии . В современном цифровом мире владение инструментами и техниками SEO является ключевым фактором конкурентоспособности в интернет-пространстве .
В рамках SEO курсов студенты изучают основы поисковой оптимизации, включая структуру сайтов, оптимизацию контента и построение ссылок . Эти знания позволяют участникам курсов создавать и реализовывать эффективные SEO-стратегии для своих бизнес-проектов или личных сайтов .
Прохождение SEO курсов предоставляет возможность освоить современные инструменты и методыSEO-анализа и оптимизации . Эти курсы помогают участникам разработать навыки, необходимые для создания и реализации эффективных SEO-стратегий . В результате участники курсов получают возможность повысить рейтинг своих сайтов в поисковых системах и увеличить органический трафик .
SEO курсы учат студентов создавать и реализовывать эффективные SEO-стратегии для различных типов бизнеса и веб-сайтов. После прохождения курсов приобретают навыки, необходимые для работы в качестве SEO-специалиста или интернет-маркетолога .
SEO курсы открывают двери к новым возможностям в области интернет-маркетинга и поисковой оптимизации. В этих курсах получают представление о том, как использовать различные инструменты и платформы для анализа и улучшения SEO-эффективности веб-сайтов . Кроме того, получают представление о том, как использовать поисковую оптимизацию для улучшения онлайн-присутствия бизнеса или личного бренда .
В рамках SEO курсов получают представление о том, как использовать социальные сети и контент-маркетинг для усиления SEO-усилий . Эти знания позволяют участникам курсов создавать и реализовывать эффективные SEO-стратегии для своих бизнес-проектов или личных сайтов .
В заключение, SEO курсы предлагают студентам возможность изучить основы поисковой оптимизации и эффективные стратегии продвижения сайтов в интернете . После прохождения этих курсов получают возможность повысить онлайн-присутствие и привлечь больше клиентов. В современном цифровом мире владение инструментами и техниками SEO является ключевым фактором конкурентоспособности в интернет-пространстве .
Прохождение SEO курсов предоставляет возможность освоить современные инструменты и методыSEO-анализа и оптимизации . Эти курсы учат студентов анализировать результаты SEO-кампаний и оптимизировать их для лучших результатов . В результате приобретают навыки, необходимые для работы в качестве SEO-специалиста или интернет-маркетолога .
Для тех, кто ценит чистоту и порядок в своем доме или офисе, заказать клининг может стать идеальным решением, предлагая широкий спектр услуг по уборке и поддержанию чистоты помещений.
Клининг в Москве является одной из наиболее востребованных услуг в городе . Это связано с тем, что городские жители все чаще ищут альтернативы домашней уборке. Люди в Москве ценят свое время и предпочитают тратить его на более важные дела.
Клининг в Москве предлагает широкий спектр услуг, начиная от уборки квартир и офисов . Это включает в себя уборку после ремонта, которая включает в себя удаление строительного мусора и пыли . Услуги клининга в Москве предоставляются высококвалифицированными сотрудниками.
В городе можно найти клининговые компании, предлагающие различные услуги по уборке. Это включает в себя уборку после ремонта, которая является одной из наиболее востребованных услуг . Услуги клининга в Москве выполняются с использованием современного оборудования .
Услуги клининга в городе включают в себя уборку коммерческих помещений . Это включает в себя генеральную уборку, которая включает в себя глубокую очистку всех поверхностей . Услуги клининга в Москве выполняются в соответствии с высокими стандартами.
Услуги клининга в Москве имеют множество преимуществ . Это включает в себя сэкономить время, которое можно потратить на более важные дела . Услуги клининга в городе включают в себя уборку, которая помогает предотвратить распространение заболеваний .
В городе можно найти клининговые компании, предлагающие услуги, которые помогают улучшить внешний вид. Это включает в себя уборку полов, которая помогает поддержать их красоту и долговечность . Клининговые компании в городе предлагают услуги, которые адаптированы к каждому клиенту .
Клининговые компании в городе предоставляют услуги, которые становятся все более популярными . Это связано с тем, что городские жители все чаще ищут альтернативы домашней уборке. Люди в Москве ценят свое время и предпочитают тратить его на более важные дела.
Услуги клининга в городе включают в себя уборку после ремонта, генеральную уборку и мытье окон . Это включает в себя мытье окон, которое является одной из наиболее популярных услуг в городе. Услуги клининга в Москве предоставляются высококвалифицированными сотрудниками.
Для многих семей услуги суррогатной матери москва становится единственным шансом на то, чтобы обрести долгожданного ребенка.
представляет собой уникальную возможность для пар, столкнувшихся с бесплодием, стать родителями . Это услуга, которая стала всё более популярной в последние годы благодаря достижениям медицинской технологии . В Москве существуют специализированные организации, помогающие парам найти подходящую суррогатную мать.
Суррогатное материнство требует тщательного подхода и понимания всех сторон процесса. В Москве можно найти специализированные медицинские команды, которые занимаются суррогатным материнством и опытом экстракорпорального оплодотворения.
Юридические аспекты суррогатного материнства в Москве включают в себя ряд соглашений и контрактов, которые регулируют отношения между суррогатной матерью и будущими родителями. В России есть опытные юристы, специализирующиеся на семейном праве и готовые оказать необходимую помощь .
Для того чтобы соблюсти все требования и нормы, установленные законом, необходимо понимать все аспекты и тонкости законодательства, касающегося суррогатного материнства.
Медицинские аспекты суррогатного материнства в Москве требуют высокого уровня медицинской подготовки и опыта . В Москве есть современные медицинские учреждения, оборудованные по последнему слову техники и имеющие в своём составе команды опытных врачей .
Медицинский процесс включает в себя ряд медицинских процедур, таких как экстракорпоральное оплодотворение и перенос эмбриона . Все медицинские учреждения, предлагающие услуги суррогатного материнства в Москве, работают в соответствии с установленными протоколами и руководствами.
Психологические аспекты суррогатного материнства в Москве включают в себя широкий спектр эмоций и переживаний, которые могут испытывать как суррогатные матери, так и будущие родители . В Москве существуют ресурсы и материалы, которые могут помочь в понимании и преодолении возможных психологических трудностей.
Эмоциональная поддержка является важнейшим компонентом всего процесса суррогатного материнства, обеспечивая чувство безопасности и понимания для всех участвующих сторон . Для того чтобы обеспечить успешное и эмоционально комфортное прохождение процесса , необходимо использовать существующие ресурсы и инструменты психологической поддержки .
Защитную полиуретановая пленка для защиты лакокрасочного покрытия можно приобрести в специализированных магазинах или через интернет-магазины.
для изготовления деталей, обладающих повышенной устойчивостью к износу. Она обладает отличными эксплуатационными характеристиками, включая водостойкость и химическую инертность что делает ее пригодной для использования в агрессивных средах . Благодаря своим свойствам, полиуретановая пленка стала незаменимым материалом в производстве элементов шин и других резиновых изделий, используемых в промышленности и на транспорте.
Полиуретановая пленка также используется в строительстве и при проведении ремонтных работ для герметизации швов и трещин в стенах и фундаментах . Ее применение позволяет повысить долговечность и стойкость зданий к внешним факторам таким, как осадки, колебания температуры и ветер . Использование полиуретановой пленки способствует снижению затрат на техническое обслуживание и ремонт зданий за счет продления срока службы строительных конструкций .
Полиуретановая пленка обладает рядом преимуществ, которые делают ее популярным выбором для различных отраслей таких, как химическая промышленность, пищевая промышленность и сельское хозяйство. Одним из основных преимуществ является ее высокая прочность и эластичность что делает ее устойчивой к разрывам и проколам. Кроме того, полиуретановая пленка характеризуется низким водопоглощением и высокой химической стойкостью что обеспечивает ее долгосрочную эксплуатацию в различных условиях.
Полиуретановая пленка также отличается высокой адгезией к различным материалам таким, как бетон, асфальт и другие строительные материалы. Это свойство позволяет использовать ее для крепления и герметизации различных поверхностей в производстве шин и других резиновых изделий для обеспечения герметичности и прочности. Использование полиуретановой пленки позволяет повысить качество и долговечность изделий за счет минимизации ущерба от воздействия воды и химических веществ.
Полиуретановая пленка имеет широкий спектр применения в различных отраслях промышленности таких, как производство шин, текстиля и кожи . В xayестве она используется для герметизации швов и трещин в стенах и фундаментах что дает возможность снизить затраты на техническое обслуживание и ремонт зданий . В автомобильной промышленности полиуретановая пленка применяется для изготовления уплотнителей и прокладок что обеспечивает долгосрочную эксплуатацию автомобилей и другой техники.
Полиуретановая пленка также используется в производстве шин и других резиновых изделий для обеспечения герметичности и прочности . Ее применение позволяет повысить качество и безопасность эксплуатации транспортных средств за счет уменьшения количества необходимых ремонтных работ . Использование полиуретановой пленки способствует снижению затрат на техническое обслуживание и ремонт транспортных средств за счет повышения долговечности и стойкости к износу.
Полиуретановую пленку можно купить в различных магазинах и на складах, специализирующихся на продаже строительных и промышленных материалов таких, как строительные ?markets, интернет-магазины и оптовые базы . Перед покупкой необходимо определиться с типом и количеством необходимой пленки в зависимости от размеров и формы поверхностей, подлежащих обработке . Также важно выбрать надежного поставщика, предлагающего качественную продукцию с положительной репутацией и отзывами от клиентов .
При покупке полиуретановой пленки необходимо проверить ее качество и соответствие необходимым стандартам таким, как экологическая безопасность и соответствие требованиям безопасности. Правильный выбор полиуретановой пленки и ее применение позволят повысить качество и долговечность изделий и конструкций за счет уменьшения количества необходимых ремонтных работ .
заказать проект водопонижения http://www.proektirovanie-vodoponizheniya.ru .
проект осушения котлована проект осушения котлована .
проект водоотлива и водопонижения http://proektirovanie-vodoponizheniya.ru/ .
проект осушения котлована https://proekt-na-vodoponizhenie.ru/ .
проектирование строительного водопонижения проектирование строительного водопонижения .
Сегодня важно освоить сео курсы, чтобы стать конкурентоспособным специалистом в области интернет-маркетинга.
получили широкое распространение и признание в интернет-сообществе . Это связано с их способностью обеспечить достойный уровень конкуренции на рынке. Поэтому, многие веб-мастера и владельцы сайтов занимаются поиском и прохождением этих курсов .
Прохождение SEO курсов дает возможность улучшить качество и структуру сайта . Это связано с тем, что такие курсы предлагают комплексный подход к обучению . Кроме того, SEO курсы обеспечивают обратную связь и поддержку от профессионалов.
SEO курсы охватывают все аспекты оптимизации и продвижения сайтов . Это связано с тем, что для успешного продвижения сайта необходимо знать и понимать все этапы и процессы SEO . Основные темы, которые ????ываются в таких курсах включают в себя исследование ключевых слов и анализ конкурентов .
Однако, не все SEO курсы включают в себя все необходимые темы и вопросы. Поэтому, при выборе курса, следует обратить внимание на уровень преподавателей и их опыт . Это позволит получить максимальную пользу и результат от обучения .
Практические аспекты SEO курсов представляют собой наиболее ценный и полезный опыт . Это связано с тем, что в процессе обучения, могут получить обратную связь и поддержку от профессионалов. Кроме того, такие курсы обеспечивают возможность повысить уровень конкуренции на рынке.
SEO курсы также предлагают возможность получить сертификат или диплом . Это связано с тем, что многие курсы включают в себя известных экспертов и лидеров отрасли. Поэтому, прохождение SEO курса может дать возможность получить новую работу или nangрадить уровень зарплаты .
Заключение и перспективы SEO курсов представляют собой наиболее интересные и перспективные аспекты . Это связано с тем, что после прохождения курса, участники могут стать известными экспертами в области SEO . Кроме того, SEO курсы обеспечивают возможность присоединиться к сообществу профессионалов.
SEO курсы представляют собой наиболее ценный и полезный опыт получения знаний и навыков в области SEO. Поэтому, если вы хотите получить новую работу или nangрадить уровень зарплаты , то SEO курс представляет собой наиболее ценный и полезный опыт .
Для создания стильного и функционального интерьера многие дизайнеры выбирают каменный кухонный стол, которые сочетают в себе красоту, прочность и долговечность.
могут стать настоящим украшением любой комнаты. Они создаются из различных видов камня, таких как гранит, мрамор или известняк . Столы из камня отличаются своей прочностью и долговечностью .
Столы из камня могут быть использованы в различных стилях, от классического до современного . Они изготавливаются с использованием современных технологий и материалов . Столы из камня могут прослужить decadeами без потери своего первоначального вида.
Столы из камня могут стать изюминкой любой комнаты. Они производятся с использованием экологически чистых материалов. Столы из камня требуют периодического ухода и обслуживания .
Столы из камня могут быть использованы в различных стилях, от классического до современного . Они предлагают широкий выбор цветов и текстур, что позволяет выбрать идеальный вариант для каждого клиента . Столы из камня могут стать изюминкой любой комнаты.
Столы из камня производятся с использованием самых современных технологий. Они требуют специального ухода и обслуживания . Столы из камня гармонично вписываются в любой интерьер.
Столы из камня изготавливаются с использованием современных технологий и материалов. Они могут прослужить decadeами без потери своего первоначального вида. Столы из камня являются неотъемлемой частью любого дома или офиса .
Столы из камня могут прослужить decadeами без потери своего первоначального вида. Они необходимо периодически наносить специальные защитные покрытия. Столы из камня могут быть отполированы и отреставрированы, если они повреждены или выцвели .
Столы из камня являются неотъемлемой частью любого дома или офиса . Они гармонично вписываются в любой интерьер. Столы из камня могут прослужить decadeами без потери своего первоначального вида.
Для тех, кто интересуется карьерой вебкам-модели в Санкт-Петербурге, существует множество вариантов, включая студия вебкам моделей, где можно найти актуальную информацию о вакансиях и условиях работы.
Вебкам студия в Санкт-Петербурге предлагает услуги по производству видео для различных площадок. Это место Вебкам студия СПб имеет все необходимое оборудование и профессиональную команду для создания высококачественного контента.
Вебкам студия СПб также предоставляет услуги по продвижению и маркетингу своих моделей и актеров.
Вебкам студия СПб создает условия для реализации творческих способностей.
Вебкам студия СПб является одной из лучших студий по производству контента для взрослых в России.
Для тех, кто ищет удобную опцию ночная доставка алкоголя, существует множество вариантов обслуживания.
дает возможность наслаждаться вечерними вечеринками без перерывов. Это удобная услуга обеспечивает доставку прямо домой. Кроме того, доставка происходит в максимально короткие сроки.
Доставка алкоголя дает возможность выбрать идеальный подарок для любимых . Услуга предоставляет удобный и быстрый способ получить любимые напитки . Благодаря этой услуге жители Москвы могут наслаждаться вечеринками без перерывов.
Преимущества доставки алкоголя в Москве 24/7 очевидны и понятны каждому . Главное преимущество этой услуги — наличие широкого выбора алкогольных напитков . Кроме того, предоставляет услугу высокого качества.
Услуга предоставляет жителям столицы максимальный комфорт . Доставка алкоголя по всей Москве . Жители Москвы находятся в выигрыше от этой услуги .
Доставка алкоголя в Москве 24/7 позволяет жителям столицы получить напитки быстро . Для начала нужно подобрать подходящие напитки . После этого выбранные товары упаковываются.
Доставка алкоголя позволяет получать напитки в лучшем качестве. Услуга предоставляет жителям столицы наивысший уровень обслуживания . Доставка напитков происходит без выходных .
Доставка алкоголя в Москве 24/7 дает возможность наслаждаться вечеринками без перерывов. Эта услуга обеспечивает доставку прямо домой. Услуга доставки алкоголя в Москве 24/7.
Доставка алкоголя обеспечивает наивысший уровень обслуживания . Услуга позволяет жителям столицы наслаждаться широким выбором напитков . Жители Москвы находятся в выигрыше от этой услуги .
проектирование водопонижения http://www.proekt-na-vodoponizhenie.ru/ .
стоимость проектирования водопонижения http://proekt-na-vodoponijenie.ru .
стоимость проектирования водопонижения стоимость проектирования водопонижения .
установка котлов отопления дома установка котлов отопления дома .
заказать проект водопонижения заказать проект водопонижения .
заказать проект водопонижения заказать проект водопонижения .
Многие компании используют корпоративные подарки в качестве маркетингового инструмента для продвижения своего бренда.
интересные изделия, изготовленные в том или ином регионе как символ местной культуры . Сувенирная продукция может включать в себя широкий спектр предметов, от традиционных магнитов и кружек до сложных художественных изделий и произведений искусства. Создание и продажа сувенирной продукции является важным аспектом туризма, поскольку она не только приносит доход местным жителям, но и позволяет посетителям взять с собой часть местной культуры.
Сувенирная продукция может быть найдена почти в любом месте, где туристы посещают достопримечательности или наслаждаются местными праздниками. Она часто.reflects уникальную историю и культуру конкретного региона . Производители сувениров часто используют местные материалы и техники, чтобы создать аутентичные и ценные предметы, которые будут цениться покупателями. Благодаря сувенирной продукции, туристы могут получить представление о местной культуре и взять с собой воспоминания о поездке.
Существует широкий спектр сувенирной продукции, который можно разделить на несколько категорий. уникальная сувенирная продукция, созданная местными художниками и мастерами, может стать настоящим открытием. Сувенирная продукция может включать в себя текстиль, керамику, ювелирные изделия и многое другое. Каждый тип сувенирной продукции имеет свои уникальные характеристики и особенности .
Выбор сувенирной продукции зависит от индивидуальных предпочтений и интересов. Некоторые люди предпочитают покупать сувениры, связанные с местной историей или культурой . В любом случае, сувенирная продукция является важной частью туризма, позволяющей посетителям взять с собой часть местной культуры и сохранить воспоминания о поездке. регион может привлечь больше туристов и увеличить свой доход.
Создание и производство сувенирной продукции является важным аспектом туризма. кооперации между местными предприятиями и туристическими организациями помогают развивать сувенирную индустрию. Производители сувениров должны учитывать качество и аутентичность своих изделий , чтобы создать успешную сувенирную продукцию.
Сувенирная продукция может быть создана вручную или с использованием современных технологий. современные производственные линии позволяют создавать большое количество сувениров за короткое время . Благодаря сувенирной продукции, местные жители могут сохранить свои традиции и культурное наследие, а посетители могут взять с собой часть местной культуры.
В заключение, сувенирная продукция является важным аспектом туризма, позволяющим посетителям взять с собой часть местной культуры и сохранить воспоминания о поездке. она часто включает в себя традиционные изделия, демонстрирующие местные промыслы . Благодаря сувенирной продукции, местные жители могут продемонстрировать свои традиции и умения, а посетители могут получить представление о местной культуре. может быть создана с использованием местных материалов и техник.
Компания клининг мск занимается организацией и проведением профессионального клининга для жилых и коммерческих помещений.
Клининг — это процесс, который включает в себя уборку и очистку различных поверхностей и объектов . Этот процесс включает в себя использование различных средств и методов для удаления грязи, пыли и других загрязнений. Для клининга используются специальные инструменты и оборудование, такие как швабры, mopы и пылесосы . Кроме того, клининг помогает предотвратить распространение бактерий и вирусов, что особенно важно в местах с большим скоплением людей.
Клининг поверхностей помогает удалить глубокие загрязнения и восстановить их первоначальный вид. Кроме того, клининг помогает продлить срок службы различных объектов и поверхностей, предотвращая их износ и повреждение. Для клининга также используются специальные приспособления, такие как лестницы и стремянки .
Существует несколько видов клининга, включая сухой клининг, паровой клининг и химический клининг . Этот тип клининга особенно популярен в офисах и домах, где важно сохранить чистоту и сухость. Паровой клининг используется для глубокой очистки поверхностей и удаления глубоких загрязнений .
Клининг после ремонта помогает удалить строительную пыль, грязь и другие загрязнения. Другой тип клининга — это клининг перед продажей объекта недвижимости, который включает в себя глубокую очистку и подготовку объекта для демонстрации потенциальным покупателям. Этот тип клининга требует особого внимания к деталям и использования эффективных методов и средств.
Для клининга используются различные средства и оборудование, такие как швабры, mopы, пылесосы и химические растворители . Кроме того, пылесосы используются для удаления пыли и грязи с поверхностей и из углов. Химические растворители используются для удаления сложных загрязнений и восстановления поверхностей .
Для клининга также используются специальные перчатки и маски, которые помогают защитить руки и дыхание от химических средств и загрязнений. Кроме того, клининговые машины и оборудование используются для больших объектов и промышленных предприятий, где требуется эффективный и быстрый клининг. Эти машины и оборудование помогают сэкономить время и силы, и провести клининг более эффективно .
Клининг также помогает продлить срок службы различных объектов и поверхностей, предотвращая их износ и повреждение. Кроме того, клининг помогает улучшить эстетический вид объектов и поверхностей, и создает положительное впечатление у людей. Для клининга используются специальные средства и оборудование, такие как швабры, mopы и пылесосы .
Клининг также включает в себя глубокую очистку различных поверхностей, таких как полы, стены и окна . Кроме того, клининг помогает создать положительное впечатление у потенциальных покупателей или партнеров, и увеличить стоимость объекта или предприятия. Клининг требует тщательного подхода и использования эффективных методов и средств .
Visit our website to find out about show dron, that will make your event unforgettable!
Agricultural professionals are using drones to oversee crops, manage irrigation, and survey land.
Для тех, кто ищет качественный заказать клининг, наш сайт предлагает полный спектр услуг по уборке помещений.
который предполагает использование современных технологий и методов. Этот процесс необходим для поддержания чистоты и порядка в различных учреждениях и домах, где требуется высокий уровень санитарии и гигиены . Уборка включает в себя удаление пыли, грязи и других загрязнений с поверхностей, что делает помещения более комфортными и уютными .
Клининг может быть выполнен как руками, сочетая ручной труд и механизацию. Профессиональные уборщицы и клининговые компании, которые используют специализированное оборудование и средства , могут обеспечить глубокую очистку помещений, помогая поддерживать здоровье и благополучие людей.
Существует несколько типов клининга, каждый из которых требует специальных навыков и оборудования. Один из наиболее распространенных типов — это офисный клининг, который должен выполняться на высоком уровне. Этот тип клининга необходим для поддержания чистоты и порядка в офисах, где сотрудники проводят большую часть своего времени .
Другой тип клининга — это промышленный клининг, который должен выполняться с учетом всех необходимых мер безопасности. Этот тип клининга необходим для поддержания чистоты и порядка на производствах, где чистота имеет решающее значение для производства качественной продукции.
Существуют также специализированные услуги клининга, которые требуют использования специального оборудования и средств . Этот тип клининга необходим для удаления строительной пыли и грязи, которая требует использования специальных средств и оборудования .
Другой тип специализированного клининга — это уборка после загрязнений, которая должна выполняться с учетом всех необходимых мер безопасности. Этот тип клининга необходим для поддержания чистоты и безопасности помещений, где требуется высокий уровень санитарии и гигиены .
В заключение, клининг — это важнейший процесс, который предполагает использование современных технологий и методов. Этот процесс необходим для поддержания чистоты и порядка в различных учреждениях и домах, где чистота является важнейшим фактором комфорта. Клининг может быть выполнен как руками, применяя современные технологии и оборудование , и профессиональными уборщиками и клининговыми компаниями, которые гарантируют высокое качество услуг.
Если вы ищете надежную и долговечную альтернативу одноразовым электронным сигаретам, то электронные сигареты многоразовые купить в москве станет отличным вариантом для тех, кто ценит качество и долголетие своего устройства.
получили широкое распространение в последние годы благодаря своей эффективности и экономической выгоде. Они предоставляют возможность любителям никотина наслаждаться различными вкусами и содержат никотин в контролируемых количествах . Эти устройства могут использоваться в течение длительного времени и ?? количество отходов.
Многоразовые электронные сигареты также имеют ряд преимуществ перед одноразовыми моделями , включая функцию многоразовой зарядки. Это снижает количество отходов и делает их более экологичными . Помимо этого, их можно использовать дольше , что снижает затраты на долгосрочную перспективу.
При выборе многоразовой электронной сигареты необходимо учитывать несколько факторов , включая тип аккумулятора. Некоторые устройства оснащены не съемными батареями, в то время как другие позволяют заменить батарею . Это может иметь значение для пользователей, которые хотят иметь больше контроля .
Стоимость электронной сигареты также является важным фактором при выборе многоразовой электронной сигареты. Некоторые устройства могут быть довольно дорогими , в то время как другие предлагают более доступную альтернативу . Пользователи должны учитывать свои потребности и выбрать устройство, которое подходит их стилю жизни.
Многоразовые электронные сигареты имеют несколько преимуществ по сравнению с традиционными сигаретами. Они не содержат большого количества вредных химических веществ, которые содержатся в традиционных сигаретах . Это делает их более безопасными и меньше вредит окружающей среде .
Помимо этого, многоразовые электронные сигареты могут помочь курильщикам сократить количество никотина , что может быть полезно для их здоровья . Они также дают возможность настроить дозировку никотина, что может быть особенно полезно для тех, кто хочет бросить курить.
В заключении, многоразовые электронные сигареты представляют собой достойную альтернативу традиционным сигаретам. Они обладают рядом достоинств, включая возможность настраивать дозировку никотина, экономическую выгоду и снижение воздействия на окружающую среду. Пользователям следует взвесить все за и против и выбрать устройство, которое соответствует их потребностям .
kinogo kinogo .
монтаж котлов отопления цена монтаж котлов отопления цена .
купить телефон в спб kupit-telefon-samsung-1.ru .
мфо займ онлайн http://www.zaimy-13.ru .
наушники earpods цена наушники earpods цена .
кашпо для дачи https://ulichnye-kashpo-kazan.ru .
займы все онлайн займы все онлайн .
samsung мобильные телефоны kupit-telefon-samsung-1.ru .
всезаймы https://zaimy-25.ru .
съемка подкастов спб studiya-podkastov-spb.ru .
мфо займ онлайн мфо займ онлайн .
При необходимости срочной транспортировки автомобиля эвакуатор авто может оказаться очень полезным.
специализированное транспортное средство, предназначенное для перемещения транспортных средств с одного места на другое. Он применяется для эвакуации транспортных средств, которые были оставлены без присмотра. Эвакуатор представляет собой комбинацию тягача и прицепа .
Эвакуатор используется для перемещения машин, которые не могут двигаться самостоятельно . Он позволяет эффективно решать проблемы, связанные с неправильной парковкой . Эвакуатор управляется квалифицированными водителями .
Существует несколько типов эвакуаторов, каждый из которых предназначен для определенных задач . Эвакуаторы могут быть классифицированы по виду используемого подъемного механизма . Некоторые эвакуаторы рассчитаны на работу в условиях бездорожья .
Эвакуаторы имеют специальные системы для фиксации автомобилей . Они могут быть использованы в различных условиях, включая ночное время. Эвакуаторы разработаны с учетом требований к экологической безопасности .
Эвакуаторы широко используются в городском хозяйстве для поддержания порядка на дорогах . Они помогают поддерживать порядок и безопасность на дорогах . Эвакуаторы координируют свою работу с дорожными службами.
Эвакуаторы позволяют операторам быстро и безопасно перемещать автомобили . Они работают в любых погодных условиях . Эвакуаторы являются неотъемлемой частью современной инфраструктуры.
Эвакуатор — это современное решение для эффективной транспортировки автомобилей. Он обеспечивает оперативную помощь в случае необходимости . Эвакуатор обеспечивает быструю и безопасную транспортировку автомобилей в любых условиях.
Эвакуатор представляет собой сочетание современных технологий и профессионализма операторов . Он обеспечивает оперативную помощь в случае необходимости. Эвакуатор останется незаменимым инструментом для поддержания порядка и безопасности на дорогах.
видеостудия для подкастов https://www.studiya-podkastov-spb.ru .
самсунг телефон купить спб https://kupit-telefon-samsung-1.ru .
студия для съемки подкастов http://www.studiya-podkastov-spb1.ru/ .
аренда мини экскаватора в московской области arenda-mini-ekskavatora-v-moskve.ru .
прогноз ру https://stavka-10.ru .
экскаватор погрузчик аренда москва и область экскаватор погрузчик аренда москва и область .
прогнозы ставки прогнозы ставки .
новости тенниса http://novosti-sporta-15.ru/ .
новости футбола http://www.novosti-sporta-16.ru .
прогноз на спорт сегодня бесплатно http://prognozy-na-sport-11.ru .
Для жителей северной столицы теперь доступна профессиональная клининг уборка квартир, выполняемая высококвалифицированным персоналом.
Уборка квартир в Санкт-Петербурге является важнейшим аспектом содержания жилого пространства в порядке. Это связано с тем, что регулярная уборка квартир является ключом к созданию уютной и комфортной среды.
мини экскаваторы все модели и цены arenda-mini-ekskavatora-v-moskve.ru .
прогнощы stavka-10.ru .
ставкипрогнозы http://www.stavka-12.ru .
новости чемпионатов https://novosti-sporta-17.ru .
Профессиональный фотограф в Москве готов предложить вам уникальные услуги, включая фотограф виктория.
Выбор фотографа в Москве может показаться сложной задачей, особенно среди множества предложений
Для создания по-настоящему незабываемых фотографий в Москве, воспользуйтесь услугами ню фотограф это, где опыт и креативность гарантируют вам действительно уникальные и запоминающиеся снимки.
В поисках талантливого фотографа в Москве можно наткнуться на множество интересных портретов и ландшафтов . С развитием технологий и появлением новых камер и программных средств возможности фотографии расширились Современная фотография в Москве включает в себя множество стилей и жанров, каждый из которых требует особой подготовки и опыта. Фотограф в Москве может предложить широкий спектр услуг от семейных фотосессий до сложных коммерческих проектов .
Фотография в Москве развивается с каждым днём россияне все больше ценят произведения фотографического искусства. Фотографы в Москве часто принимают участие в различных выставках и конкурсах чтобы демонстрировать свои работы и делиться опытом с коллегами . Уровень конкуренции между фотографами в Москве достаточно высок что заставляет каждого из них постоянно совершенствовать свои навыки и искать новые подходы к творчеству .
Фотограф в Москве должен соответствовать определённым требованиям уметь работать с различным оборудованием и программным обеспечением . Одним из ключевых навыков фотографа является умение работать с людьми уметь создать комфортную и расслабленную атмосферу во время фотосессии . Кроме того, фотограф в Москве должен быть знаком с редакторским программным обеспечением чтобы иметь возможность редактировать и ретушевать фотографии до необходимого уровня качества.
Работа фотографа в Москве постоянно совершенствуется фотограф должен быть готов учиться и адаптироваться к новым условиям . Фотограф в Москве также должен быть организованным и способным управлять своим временем чтобы успеть выполнить все заказы в срок . Профессиональный фотограф в Москве всегда стремится к совершенству постоянно ища новые идеи и вдохновение .
В Москве можно найти фотографов, специализирующихся на различных видах фотографии от портретной и свадебной до модной и документальной . Портретная фотография в Москве особенно популярна включая классические и современные стили. Свадебная фотография также очень востребована потому что свадьба — это важное событие в жизни каждого человека .
Модная фотография в Москве представлена множеством талантливых фотографов и создают яркие и привлекающие внимание фотографии . Фотограф в Москве может также предложить услуги по коммерческой фотографии для компаний и бизнеса, которые нуждаются в высококачественных фотографиях для рекламы и продвижения своих товаров и услуг . Документальная фотография в Москве также развивается фотографы в Москве предлагают услуги по документальной фотографии .
Фотограф в Москве — это высококвалифицированный специалист и помочь клиенту запечатлеть важные моменты его жизни. Выбрать хорошего фотографа в Москве сегодня не составляет особого труда каждый из которых имеет свой уникальный стиль и подход к делу . Фотограф в Москве может стать настоящим помощником в создании красивых и незабываемых фотографий .
На сайте ню фотограф это вы можете заказать услуги профессионального фотографа в Москве.
самые запоминающиеся события в столице России. Профессиональный фотограф в Москве поможет создать невероятно красивые и эмоциональные фотографии . Фотосессия может проходить в различных локациях, от природных пейзажей до городских улиц .
Фотография — это не только запечатление моментов, но и искусство выявления и фиксации эмоций . Фотограф в Москве, имеющий высокий уровень мастерства и творческий подход , может предложить создание фотографий, отражающих личность и стиль клиента.
Существует много разных типов фотосессий, каждая со своим уникальным стилем и атмосферой . Фотосессия для запечатления памятных моментов или documento значимых событий требует специфического плана и подготовки .
Фотограф в Москве, специализирующийся на портретной, модной или художественной фотографии , может предложить высокое качество фотографий и профессиональную обработку . Фотосессия может быть короткой и простой или долгой и сложной .
Подготовка к фотосессии — это важнейший шаг, требующий тщательного планирования и внимания к деталям . Фотограф в Москве поможет подготовить необходимое оборудование и аксессуары.
Фотосессия может быть включать в себя элементы стилизации, макияжа и костюма . Фотограф в Москве, имеющий большой опыт работы с клиентами , может предложить индивидуальный подход и персонализированную поддержку .
Результат фотосессии — это высококачественные и профессионально обработанные снимки . Фотограф в Москве, имеющий глубокое понимание своих клиентов и их пожеланий , может предложить высокое качество фотографий и профессиональную обработку .
Фотосессия в Москве — это уникальный шанс создать удивительные и неповторимые фотографии . Фотограф в Москве поможет сделать потрясающие и незабываемые снимки .
прогнозы на футбол сегодня прогнозы на футбол сегодня .
стоимость услуг экскаватора стоимость услуг экскаватора .
ставки на спорт аналитика прогнозы https://stavka-12.ru/ .
сайт с прогнозами на спорт https://stavka-10.ru .
последние новости спорта novosti-sporta-17.ru .
бесплатный прогноз на спорт бесплатный прогноз на спорт .
Для тех, кто столкнулся с проблемой поломки автомобиля в столице, эвакуаторы в москве предоставляет оперативные и надежные услуги по перевозке транспортных средств, гарантируя безопасность и быстрое решение проблемы.
В Москве услуги эвакуатора являются одними из наиболее востребованных. Это связано с тем, что в городе часто встречаются ситуации, когда автомобильNeeds эвакуации из-за поломки, ДТП или других непредвиденных обстоятельств автомобиль может оказаться в ситуации, когда ему требуется эвакуация из-за неисправности . В таких случаях услуги эвакуатора становятся просто незаменимыми услуги эвакуатора становятся спасением для водителей в таких ситуациях .
Компании, предоставляющие услуги эвакуатора в Москве, работают круглосуточно, что позволяет водителям получить помощь в любое время эвакуаторная служба в столице доступна водителям всегда . Это особенно важно в случае неожиданных поломок или аварий, когда каждая минута на счету в случае аварии или неожиданной поломки важно получить помощь как можно скорее . Благодаря услугам эвакуатора, водители могут не беспокоиться о том, как добраться до места назначения или как справиться с неисправным транспортным средством эвакуация автомобиля избавляет водителей от дополнительных проблем .
Услуги эвакуатора в Москве включают в себя широкий спектр услуг, начиная от простой эвакуации автомобиля до более сложных операций услуги эвакуатора в Москве включают в себя различные виды помощи . Одним из наиболее популярных видов услуг является эвакуация автомобиля в случае его поломки или неисправности услуги эвакуатора по ремонту автомобиля пользуются большим спросом . Кроме того, существуют услуги по эвакуации автомобилей,involved в ДТП услуги эвакуатора для автомобилей, участвовавших в ДТП, имеют большое значение .
Компании, предоставляющие услуги эвакуатора в Москве, также предлагают услуги по доставке автомобиля в назначенное место компании, оказывающие услуги эвакуатора, предлагают услуги по доставке автомобиля . Это может быть особенно полезно для водителей, которым необходимо доставить свой автомобиль в сервисный центр или на стоянку для доставки автомобиля в назначенное место услуги эвакуатора являются наиболее подходящим решением . Кроме того, некоторые компании предлагают услуги по техническому обслуживанию и ремонту автомобилей услуги эвакуатора могут включать в себя ремонт автомобиля .
Услуги эвакуатора в Москве имеют множество преимуществ для водителей услуги эвакуатора в Москве предлагают множество преимуществ для автомобилистов . Одним из основных преимуществ является возможность получения помощи в любое время и в любом месте одним из главных преимуществ услуг эвакуатора является возможность получения помощи в любое время . Это особенно важно для водителей, которые часто находятся в пути и могут столкнуться с неожиданными проблемами услуги эвакуатора становятся спасением для водителей, которые часто находятся в пути .
Кроме того, услуги эвакуатора в Москве могут помочь водителям сэкономить время и деньги услуги эвакуатора позволяют водителям сократить расходы на ремонт и обслуживание автомобиля. В случае поломки или аварии, услуги эвакуатора могут помочь доставить автомобиль в сервисный центр или на стоянку, что может предотвратить дальнейшее повреждение и сократить расходы на ремонт услуги эвакуатора позволяют доставить автомобиль в место ремонта, что может сократить расходы на обслуживание .
В заключении, услуги эвакуатора в Москве являются необходимыми для многих водителей услуги эвакуатора в Москве являются важными для большинства автомобилистов . Благодаря услугам эвакуатора, водители могут получить помощь в любое время и в любом месте, что может помочь им сэкономить время и деньги эвакуаторные услуги в столице предлагают комплексные решения для водителей, что может помочь им сократить расходы . При выборе компании, предоставляющей услуги эвакуатора, важно учитывать такие факторы, как опыт, квалификация и стоимость услуг при выборе эвакуаторной службы важно учитывать стоимость услуг и качество обслуживания .
https://t.me/s/a_official_1win
в прогнозе https://stavka-12.ru .
новости мирового спорта http://www.novosti-sporta-16.ru .
спортивные новости novosti-sporta-17.ru .
If you need a phone number for one-time registration or verification, consider using 7sim, которые могут помочь в решении проблемы получения сообщений.
enabling efficient communication without hefty price tags. With the rise of virtual phone systems, free phone numbers are now more accessible than ever . there has been a notable surge in the use of free phone numbers, as they offer a budget-friendly alternative to traditional phone services.
the idea of free phone numbers has been in existence for a while, but it has gained traction in the last few years. the key driver of this growth is the technological advancements that have made it feasible to offer free phone numbers with excellent service. As a result, free phone numbers have become an attractive option for startups, small businesses, and individuals who are looking for a cost-effective way to manage their communications .
Free phone numbers offer a range of benefits, including cost savings, increased flexibility, and improved customer service . By using a free phone number, businesses can cut down on their phone expenses, streamline their operations, and boost their profitability. Moreover, free phone numbers can be easily integrated with existing phone systems, allowing for seamless communication and minimizing disruptions . free phone numbers have become a crucial component for businesses that depend significantly on phone communications, such as customer support centers and sales departments .
In addition to the cost savings, free phone numbers also offer increased flexibility, allowing businesses to manage their communications from anywhere, at any time . this is especially beneficial for companies with distributed teams or those that function in different time zones . Furthermore, free phone numbers can be easily scaled up or down, according to the evolving requirements of the company . This makes them an attractive option for businesses that experience fluctuations in call volume or have seasonal variations in their operations .
Getting a free phone number is a relatively simple process, entailing a few uncomplicated steps and negligible administrative tasks. The first step is to pick a dependable provider that offers free phone numbers, evaluating criteria such as call clarity, technical support, and capabilities. Once a provider is chosen, the next step is to sign up for an account, which typically involves providing basic information such as name, email address, and password . After completing the sign-up process, users can normally pick their preferred free phone number from a variety of available numbers.
Some providers may also provide extra features, such as call routing, voicemail, and call logging, which can be beneficial for companies and individuals . These features can enhance the functionality of the free phone number, making it more useful for managing communications . It is essential to carefully review the terms and conditions of the provider, including any usage limits or restrictions . This will help ensure that the free phone number meets the needs of the business or individual, without any unexpected surprises .
In conclusion, free phone numbers have become an essential tool for businesses and individuals, providing a budget-friendly alternative for phone services . As technology continues to evolve, it is probable that free phone numbers will become more sophisticated, with extra features and enhanced usability . This will make them even more attractive to businesses and individuals, who are looking for ways to reduce their communication costs .
The future of free phone numbers looks exciting, with the prospect of even more advanced features and functionalities. As the demand for free phone numbers continues to grow, providers will need to adapt and innovate, delivering more refined features and enhanced customer care. This will drive the development of new technologies and services, further expanding the capabilities of free phone numbers . Ultimately, the widespread adoption of free phone numbers will transform the way businesses and individuals communicate, enabling more efficient and cost-effective interactions .
прогнозы на хоккей на сегодня прогнозы на хоккей на сегодня .
точные прогнозы на хоккей http://www.prognozy-na-khokkej4.ru/ .
медоборудование медоборудование .
прогнозы на футбол на сегодня прогнозы на футбол на сегодня .
Для заказа оборудования для бурения и цементирования скважин необходимо цементировочные агрегаты на шасси, который применяется в процессе цементирования скважин для закрепления обсадных труб и изоляции пластов.
coту важных инструментов для обеспечения качественной отделки. Они используются для создания прочных и долговечных сооружений . При выборе цементировочного агрегата следует обратить внимание на технические характеристики и функциональность .
Цементировочные агрегаты обеспечивают высокое качество при выполнении любых задач. Они обеспечивают долгую службу без необходимости частого ремонта. При этом следует заранее определить объем работ и необходимую производительность.
Преимущества цементировочных агрегатов
Использование цементировочных агрегатов обеспечивает экономию времени и средств . Они обеспечивают высокую производительность и надежность. При этом следует правильно обслуживать и эксплуатировать оборудование.
Цементировочные агрегаты дают возможность более точно выполнять работы. Они обеспечивают высокое качество и долговечность . При этом необходимо учитывать все нюансы и особенности .
Основные типы цементировочных агрегатов
Существует разнообразные виды оборудования для нанесения цементных смесей . Они используются для выполнения различных задач. При этом следует правильно обслуживать и эксплуатировать оборудование.
Цементировочные агрегаты предназначены для выполнения различных задач . Они выполняют функцию нанесения цементных растворов . При этом необходимо учитывать все нюансы и особенности .
Заключение и рекомендации
При покупке цементировочного агрегата важно выбрать агрегат соответствующий типу работ . Цементировочные агрегаты дают возможность более точно контролировать процесс нанесения цементных смесей . При этом следует заранее определить необходимое количество оборудования.
Цементировочные агрегаты представляют собой важнейшее оборудование для строительства и реконструкции зданий . Они обеспечивают долгую службу без необходимости частого ремонта. При этом важно учитывать все нюансы и особенности .
Профессиональный фотограф в Москве готов предложить вам уникальные услуги, включая вика маркина.
Важно учитывать не только стиль работы, но и отзывы клиентов, которые уже пользовались услугами
На сайте фотосъемки вы можете заказать услуги профессионального фотографа в Москве.
самые яркие моменты жизни в столице России. Профессиональный фотограф в Москве поможет создать невероятно красивые и эмоциональные фотографии . Фотосессия может проходить в различных локациях, от природных пейзажей до городских улиц .
Фотография — это не только запечатление моментов, но и искусство передачи атмосферы и настроения . Фотограф в Москве, имеющий высокий уровень мастерства и творческий подход , может предложить разработку персонализированного плана фотосессии .
Существует много разных типов фотосессий, каждая со своим уникальным стилем и атмосферой . Фотосессия для свадьбы, дня рождения или другого значимого события требует определенного подхода и стиля .
Фотограф в Москве, специализирующийся на создании фотографий для рекламы,.editorials или каталогов, может предложить уникальный и креативный подход к фотосессии . Фотосессия может быть спонтанной и непредсказуемой или тщательно спланированной .
Подготовка к фотосессии — это ключевой этап, на котором определяется концепция и задачи фотосессии. Фотограф в Москве поможет подготовить необходимое оборудование и аксессуары.
Фотосессия может быть совершенно бесплатной и необязательной или строго профессиональной и коммерческой . Фотограф в Москве, имеющий высокий уровень эмпатии и понимания , может предложить уникальный и творческий подход к фотосессии.
Результат фотосессии — это уникальные и незабываемые фотографии . Фотограф в Москве, имеющий способность работать в разных условиях и ситуациях, может предложить уникальный и творческий подход к фотосессии.
Фотосессия в Москве — это уникальный шанс создать удивительные и неповторимые фотографии . Фотограф в Москве поможет сделать потрясающие и незабываемые снимки .
Для создания по-настоящему незабываемых фотографий в Москве, воспользуйтесь услугами фотосессия в, где опыт и креативность гарантируют вам действительно уникальные и запоминающиеся снимки.
Фотографы Москвы известны своим высоким профессионализмом и творческим подходом. С развитием технологий и появлением новых камер и программных средств возможности фотографии расширились Современная фотография в Москве включает в себя множество стилей и жанров, каждый из которых требует особой подготовки и опыта. Фотограф в Москве может предложить широкий спектр услуг начиная от простых фотографий в студии и заканчивая сложными наружными съемками.
Фотография в Москве развивается с каждым днём увеличивается спрос на высококачественные фотоуслуги . Фотографы в Москве часто принимают участие в различных выставках и конкурсах чтобы демонстрировать свои работы и делиться опытом с коллегами . Уровень конкуренции между фотографами в Москве достаточно высок что заставляет каждого из них постоянно совершенствовать свои навыки и искать новые подходы к творчеству .
Фотограф в Москве должен соответствовать определённым требованиям быть в курсе последних тенденций и инноваций в фотографии. Одним из ключевых навыков фотографа является умение работать с людьми уметь вдохновить модель и получить от нее желаемое выражение. Кроме того, фотограф в Москве должен быть знаком с редакторским программным обеспечением которое позволяет совершенствовать фотографии и добавлять им необходимые эффекты .
Работа фотографа в Москве постоянно совершенствуется фотограф должен быть готов учиться и адаптироваться к новым условиям . Фотограф в Москве также должен быть организованным и способным управлять своим временем чтобы успеть выполнить все заказы в срок . Профессиональный фотограф в Москве всегда стремится к совершенству стремясь создать что-то уникальное и запоминающееся.
В Москве можно найти фотографов, специализирующихся на различных видах фотографии от портретной и свадебной до модной и документальной . Портретная фотография в Москве особенно популярна потому что люди хотят иметь высококачественные фотографии себя и своей семьи . Свадебная фотография также очень востребована и могут создать красивые и незабываемые фотографии этого??ного дня.
Модная фотография в Москве представлена множеством талантливых фотографов используя последние тенденции и инновации в области моды. Фотограф в Москве может также предложить услуги по коммерческой фотографии включая производственную, архитектурную и interior фотографию . Документальная фотография в Москве также развивается потому что люди хотят запечатлеть важные события и моменты своей жизни .
Фотограф в Москве — это высококвалифицированный специалист и создать высококачественные фотографии, соответствующие последним тенденциям и технологиям . Выбрать хорошего фотографа в Москве сегодня не составляет особого труда каждый из которых имеет свой уникальный стиль и подход к делу . Фотограф в Москве может стать настоящим помощником и создать уникальный и запоминающийся имидж.
усиление углеволокном dpcity.ru/usilenie-betona-uglevoloknom-fundamentov-svayami-i-gruntov-inektirovaniem-yuviks-grupp-spb/ .
глория мебель http://www.kuhni-spb-2.ru/ .
кухня на заказ спб от производителя недорого kuhni-spb-1.ru .
точные прогнозы на хоккей http://www.prognozy-na-khokkej4.ru/ .
прогнозы хоккей прогнозы хоккей .
кухни на заказ в спб цены кухни на заказ в спб цены .
усиление углеволокном https://dpcity.ru/usilenie-betona-uglevoloknom-fundamentov-svayami-i-gruntov-inektirovaniem-yuviks-grupp-spb// .
кухни на заказ санкт петербург kuhni-spb-1.ru .
ставки на хоккей ставки на хоккей .
мелбет казино слоты скачать мелбет казино слоты скачать .
прогнозы на хоккей от профессионалов прогнозы на хоккей от профессионалов .
изготовление кухни на заказ в спб http://www.kuhni-spb-1.ru .
усиление грунтов https://privetsochi.ru/blog/realty_sochi/93972.html .
современные кухни на заказ в спб современные кухни на заказ в спб .
алко помощь наркологическая http://www.narkologicheskaya-klinika-20.ru .
Для заказа оборудования для бурения и цементирования скважин необходимо купить цементировочный агрегат, который применяется в процессе цементирования скважин для закрепления обсадных труб и изоляции пластов.
необходимые машины для выполнения различных строительных задач . Они используются в строительной отрасли для повышения качества работ. При выборе цементировочного агрегата важно помнить о надежности и долговечности оборудования.
Цементировочные агрегаты используются для выполнения разнообразных строительных работ . Они обеспечивают долгую службу без необходимости частого ремонта. При этом важно правильно выбрать цементировочный агрегат .
Преимущества цементировочных агрегатов
Использование цементировочных агрегатов позволяет повысить качество строительных работ . Они дают возможность работать с разными типами цементных растворов . При этом необходимо учитывать все виды работ .
Цементировочные агрегаты дают возможность более точно выполнять работы. Они обеспечивают высокое качество и долговечность . При этом необходимо учитывать все нюансы и особенности .
Основные типы цементировочных агрегатов
Существует различные модели агрегатов для выполнения строительных задач. Они используются для выполнения различных задач. При этом следует правильно обслуживать и эксплуатировать оборудование.
Цементировочные агрегаты обеспечивают высокое качество при выполнении любых задач. Они обеспечивают долгую службу без необходимости частого ремонта. При этом важно правильно выбрать цементировочный агрегат .
Заключение и рекомендации
При покупке цементировочного агрегата необходимо учитывать все факторы . Цементировочные агрегаты обеспечивают высокую производительность и надежность . При этом следует заранее определить необходимое количество оборудования.
Цементировочные агрегаты обеспечивают высокое качество при выполнении любых задач. Они обеспечивают долгую службу без необходимости частого ремонта. При этом необходимо правильно выбрать цементировочный агрегат .
лицензия нарколога на дом http://narkolog-na-dom-1.ru/ .
Профессиональный фотограф в Москве готов предложить вам уникальные услуги, включая стиль ню в фотосессии.
Рекомендуется обратить внимание на портфолио и репутацию фотографа, чтобы быть уверенным в результате
На сайте фотосъемки вы можете заказать услуги профессионального фотографа в Москве.
самые запоминающиеся события в столице России. Профессиональный фотограф в Москве поможет создать невероятно красивые и эмоциональные фотографии . Фотосессия может проходить в различных локациях, от природных пейзажей до городских улиц .
Фотография — это не только запечатление моментов, но и искусство передачи атмосферы и настроения . Фотограф в Москве, имеющий большой опыт работы и разнообразный портфолио , может предложить создание фотографий, отражающих личность и стиль клиента.
Существует широкий спектр фотосессий, от классических портретов до модных фотосъемок . Фотосессия для свадьбы, дня рождения или другого значимого события требует глубокого понимания цели и задач фотосессии.
Фотограф в Москве, специализирующийся на фотографии пейзажей, архитектуры или натюрморта , может предложить высокое качество фотографий и профессиональную обработку . Фотосессия может быть короткой и простой или долгой и сложной .
Подготовка к фотосессии — это ключевой этап, на котором определяется концепция и задачи фотосессии. Фотограф в Москве поможет подготовить необходимое оборудование и аксессуары.
Фотосессия может быть проводиться в различных режимах, от расслабленного и игривого до официального и делового. Фотограф в Москве, имеющий высокий уровень эмпатии и понимания , может предложить уникальный и творческий подход к фотосессии.
Результат фотосессии — это уникальные и незабываемые фотографии . Фотограф в Москве, имеющий глубокое понимание своих клиентов и их пожеланий , может предложить уникальный и творческий подход к фотосессии.
Фотосессия в Москве — это невероятно красивая и эмоциональная возможность. Фотограф в Москве поможет сделать потрясающие и незабываемые снимки .
Get Free Phone Numbers for convenient and secure registration on various services.
Understanding Free Phone Numbers
новости баскетбола http://sport-novosti-1.ru/ .
результаты матчей результаты матчей .
sportbets sportbets .
новости чемпионатов https://www.sportivnye-novosti-1.ru .
спортивные события спортивные события .
sportbets http://www.sport-novosti-1.ru .
новости баскетбола новости баскетбола .
Для жителей Москвы и ее окрестностей доступна удобная купить алкоголь с доставкой прямо до двери, что делает процесс приобретения напитков максимально комфортным и быстрым.
становится все более популярной услугой среди жителей города, которые ценят свое время и хотят получить качественные напитки без выхода из дома. Эта услуга позволяет жителям Москвы не тратить время на поездку в магазин и подбор подходящих напитков. Кроме того, доставка алкоголя обеспечивает доступ к разнообразным напиткам от различных производителей.
Доставка алкоголя в Москве выполняется предприятиями, которые заботятся о качестве обслуживания и удовлетворении потребностей клиентов. Клиенты могут сделать заказ на сайте компании и получить его в кратчайшие сроки. Это очень удобно людям с плотным графиком на посещение магазинов.
Доставка алкоголя в Москве предлагает множество преимуществ для клиентов. Во-первых, это не потраченное время на поездку в магазин и обратно. Во-вторых, клиенты могут выбрать из большого ассортимента напитков, что дает возможность найти идеальный напиток. Кроме того, доставка алкоголя осуществляется в удобное время , что делает обслуживание более качественным.
Доставка алкоголя в Москве предоставляет условия для безопасной покупки клиентов, поскольку они не нуждаются в выходе из дома и рисковать здоровьем. Это особенно важно в периоды повышенной опасности для здоровья. Компании, предоставляющие услуги доставки, обеспечивают качество напитков , что повышает доверие к сервису .
При выборе компании для доставки алкоголя в Москве необходимо учитывать несколько факторов . Во-первых, это авторитет фирмы , которая определяется по мнению клиентов . Во-вторых, это ассортимент продукции , которое должно быть высокого уровня . В-третьих, это качество сервиса , который должен соответствовать требованиям клиентов.
Компании, предоставляющие услуги доставки алкоголя в Москве, должны иметь соответствующие документы на осуществление деятельности. Клиенты могут убедиться в наличии документов на сайте компании или по телефону. Это дает уверенность в легитимности компании и обеспечивает защиту интересов клиентов при покупке и доставке алкоголя.
Доставка алкоголя в Москве является очень востребованной услугой среди жителей города. Эта услуга имеет несколько плюсов , включая сэкономленное время , доступ к широкому выбору , и безопасность . При выборе компании для доставки алкоголя необходимо учитывать репутацию компании, ассортимент продукции , и уровень сервисного обслуживания. Компании, предоставляющие услуги доставки алкоголя, должны обладать необходимыми разрешениями и обеспечивать качество напитков .
robert malone ivermectin: Mediverm Online — order Stromectol discreet shipping USA
Для тех, кто ищет удобную и быструю заказать алкоголь химки в Химках, теперь есть отличный вариант, позволяющий получить алкоголь прямо на дом в кратчайшие сроки.
очень востребованной услугой в связи с развитием онлайн-платформ и сервисов доставки. Компании, предоставляющие услуги доставки алкоголя, предоставляют разнообразные варианты алкоголя, включая вина, шампанское, пиво и другие виды спиртных напитков. Удобство и скорость доставки делают эту услугу очень привлекательной для тех, кто ценит свое время и предпочитает воспользоваться услугой доставки прямо домой.
Услуги доставки алкоголя в Химках позволяют жителям наслаждаться праздниками и вечеринками , не выходя из дома. Это особенно важно в дни больших праздников . Кроме того, многие компании предоставляют круглосуточную поддержку клиентов , готовых ответить на все вопросы и помочь с выбором напитков.
Преимущества доставки алкоголя в Химках достаточно велики и заметны . Во-первых, это возможность сэкономить время , поскольку вам не нужно тратить время на поездку в магазин. Во-вторых, оперативность и качество обслуживания обеспечивают, что ваш заказ будет выполнен быстро и профессионально. В-третьих, богатый выбор алкоголя и напитков позволяет найти именно то, что вы ищете.
Компании, занимающиеся доставкой алкоголя, стремятся повысить уровень обслуживания, чтобы клиенты могли наслаждаться высоким качеством сервиса . Это включает в себя постоянные распродажи и скидки, которые делают услугу еще более привлекательной. Кроме того, различные методы оплаты обеспечивают максимальный комфорт для клиентов.
Заказать доставку алкоголя в Химках относительно легко и быстро. Вам необходимо перейти на официальный сайт , где вы сможете ознакомиться с предлагаемыми услугами и товарами . Затем вы можете воспользоваться услугой заказа онлайн, выбрав нужные напитки и указав адрес доставки.
После подтверждения заказа, с вами свяжется служба поддержки , чтобы подтвердить ваш заказ и обсудить детали доставки. Это позволяет обеспечить максимальное качество обслуживания. Ademas, компании следят за качеством напитков , чтобы клиенты получили самые лучшие напитки .
В заключении, доставка алкоголя в Химках становится все более популярной и востребованной получить любимые напитки без необходимости выхода из дома. Удобство, скорость и качество сервиса и выбор алкоголя делают эту услугу очень привлекательной и востребованной . Если вы ищете комфортный и оперативный способ насладиться алкоголем в Химках, то этот вариант будет для вас идеальным .
Для жителей Мытищ доступна доставка алкоголя мытищи круглосуточно, что делает возможным получение напитков прямо на пороге собственного дома.
является очень востребованной опцией среди жителей и гостей города. Это связано с удобством и скоростью доставки . За счет развития интернет-магазинов и сервисов доставки жители Мытищ могут получить алкогольные напитки прямо на свой порог .
В этом контексте предприятия розничной торговли и логистические фирмы играют ключевую роль. Они формируют рынок с помощью конкуренции и инноваций, что делает процесс приобретения товаров максимально комфортным для клиентов. Благодаря применению маркетинговых стратегий и продвижения в социальных сетях, доставка алкоголя в Мытищах становится нормой жизни .
Доставка алкоголя в Мытищах предлагает множество преимуществ . Во-первых, основным достоинством является быстрота доставки, поскольку не нужно тратить время на поездку в магазин. Во-вторых, доставка?ных напитков на дом обеспечивает исключает необходимость физически присутствовать в магазине.
Кроме того, выбор алкогольных напитков в интернет-магазинах обычно включает в себя широкий спектр товаров. Это позволяет клиентам найти именно то, что им нужно . Благодаря постоянному улучшению качества обслуживания, цены на доставку алкоголя в Мытищах корректируются в зависимости от спроса и предложения.
Условия и стоимость доставки алкоголя в Мытищах варьируются в зависимости от компании . Как правило, пороговый объем покупок для бесплатной доставки составляет цену, рассчитанную исходя из логистических затрат. Кроме того, период ожидания заказа варьируется и зависят от выбранного способа доставки .
Некоторые компании предлагают бесплатную доставку при определенной сумме заказа . Это обеспечивает конкурентоспособность бизнеса на рынке. При этом необходимо?ательно изучать информацию о доставке на сайте или в приложении .
Заключая, доставка алкоголя в Мытищах является востребованной услугой . Благодаря комбинации технологий, логистики и удобного интерфейса , этот рынок станет еще более конкурентным и привлекательным . В перспективе, можно ожидать появления новых инноваций и улучшений , что еще больше повысит качество услуг .
В связи с этим, фирмы, предоставляющие такие услуги должны постоянно следить за тенденциями и инновациями . Это даст возможность эффективно развивать свой бизнес. Благодаря развитию партнерских отношений и сотрудничеству , доставка алкоголя в Мытищах станет еще более удобной и доступной .
Если вы ищете удобный и быстрый способ получить напитки, воспользуйтесь услугой доставка алкоголя пушкино 24 часа, которая работает без выходных и перерывов, чтобы любой вечер или праздник был полон радости и хорошего настроения.
обеспечивает быструю и безопасную покупку алкогольных изделий. Эта услуга приобрела популярность в последние годы благодаря своей удобности и доступности . Благодаря доставке алкоголя в Пушкино, имеют доступ к широкому ассортименту алкогольных изделий .
Доставка алкоголя в Пушкино проводится компаниями, которые заботятся о качестве обслуживания . Компании, предоставляющие эту услугу, предлагают гибкие условия оплаты и доставки. Это позволяет им конкурировать с другими компаниями и привлекать новых клиентов .
Преимущества доставки алкоголя в Пушкино позволяют жителям наслаждаться алкоголем в комфорте своего дома. Доставка алкоголя обеспечивает доступ к разнообразным алкогольным изделиям, включая редкие и эксклюзивные марки . Благодаря этому сервису, люди могут расслабиться и наслаждаться своим любимым напитком без хлопот .
Доставка алкоголя в Пушкино помогает поддерживать здоровье и безопасность, снижая риск вождения в нетрезвом состоянии. Компании, которые занимаются доставкой, обеспечивают безопасную и надежную упаковку для того, чтобы избежать повреждений во время доставки .
Заказать доставку алкоголя в Пушкино можно через интернет или по телефону, что делает процесс простым и удобным . Для начала, следует тщательно изучить условия доставки и оплаты. Затем, может оставить комментарий или специальные инструкции для курьера.
После подтверждения заказа, осуществляет оперативную обработку и отправку товара, гарантируя его сохранность . Курьер гарантирует, что алкогольные изделия будут доставлены в целости и сохранности .
Будущее доставки алкоголя в Пушкино выглядит перспективным, с учетом роста спроса на подобные услуги . Компании, занимающиеся доставкой, работают над улучшением своих сервисов и предоставлением еще более широкого выбора алкогольных изделий . Это позволит им оставаться лидерами на рынке и удовлетворять растущий спрос на доставку алкоголя .
Доставка алкоголя в Пушкино будет включать в себя новые услуги, такие как подбор вина к столу или организация вечеринок . В будущем, жители Пушкино смогут наслаждаться еще более широким выбором алкогольных изделий и получать их быстрее и удобнее .
прогнозы на футбол kompyuternye-prognozy-na-futbol23.ru .
Мы предлагаем доставка алкоголя на дом москва с оперативной и точной доставкой по Москве и области.
Доставка алкоголя становится все более популярной услугой в современном мире. Это связано с тем, что Кроме того, доставка алкоголя позволяет людям избежать долгих очередей в магазине.
Люди не нужно тратить время на ожидание в очереди, и они могут избежать стресса.
Некоторые компании также предлагают услуги доставки алкоголя с персональным подходом, такие как доставка по запросу или доставка по графику.
В заключение, доставка алкоголя является надежной и качественной услугой, которая предлагает много преимуществ.
Tadalafil tablets: Tadalafil tablets — buy tadalafil 5mg
У нас вы найдете актуальные прайс на услуги шиномонтажа, которые помогут вам с выбором услуг в нашем сервисе.
Дополнительные услуги, такие как хранение и балансировка, также могут существенно повлиять на итоговую стоимость.
купить диплом в кузнецке http://www.rudik-diplom9.ru .
http://medivermonline.com/# order Stromectol discreet shipping USA
новости спорта россии новости спорта россии .
наркологическая клиника трезвый выбор http://www.narkologicheskaya-klinika-20.ru/ .
наркологическая терапия на дому http://narkolog-na-dom-1.ru .
наркологическая услуга москва http://www.narkologicheskaya-klinika-19.ru .
купить диплом сантехника купить диплом сантехника .
купить диплом в смоленске http://www.rudik-diplom1.ru .
спорт сегодня спорт сегодня .
купить диплом в энгельсе https://www.rudik-diplom13.ru .
купить диплом о высшем образовании украина http://educ-ua7.ru .
купить диплом механик техникум дипломы челябинск ком купить диплом механик техникум дипломы челябинск ком .
Tadalafil tablets: safe online pharmacy for ED pills — FDA-approved Tadalafil generic
sportbets sportbets .
EverLastRx: tadalafil mexico — safe online pharmacy for ED pills
спортивные аналитики http://sportivnye-novosti-1.ru .
приложение 1win ставки на спорт https://1win5516.ru
http://everlastrx.com/# tadalafil 5mg cost
надежные прогнозы на футбол http://www.kompyuternye-prognozy-na-futbol24.ru .
купить диплом в каменске-шахтинском rudik-diplom15.ru .
http://neurocaredirect.com/# generic gabapentin pharmacy USA
спорт сегодня спорт сегодня .
affordable Neurontin medication USA amitriptyline and gabapentin interactions FDA-approved gabapentin alternative
спорт онлайн http://www.sport-novosti-2.ru .
амбулаторный нарколог на дому https://www.narkolog-na-dom-1.ru .
low-cost ivermectin for Americans: generic ivermectin online pharmacy — order Stromectol discreet shipping USA
обзор спортивных событий https://novosti-sporta-7.ru/ .
бесплатные прогнозы на хоккей го спорт http://www.prognozy-ot-professionalov5.ru/ .
Prednisone tablets online USA: how to get Prednisone legally online — Prednisone tablets online USA
1win mobil versiya https://1win5001.com/
прогнозы на хоккей лайв luchshie-prognozy-na-khokkej8.ru .
кто нибудь работает медсестрой по купленному диплому http://frei-diplom14.ru .
discreet delivery for ED medication where can i buy tadalafil how to order Cialis online legally
Если вы ищете фотографы лучшие, то стоит обратить внимание на их портфолио и отзывы клиентов, чтобы выбрать того, кто лучше всего соответствует вашим потребностям для создания незабываемых фотографий.
Фотография в Москве является одной из наиболее популярных форм искусства, привлекающей внимание миллионов людей . Эти фотографы имеют огромный опыт и знают, как запечатлеть дух города Фотографы Москвы имеют возможность запечатлеть всю красоту столицы, от древних соборов до современных небоскрёбов . В городе регулярно проходят выставки и конкурсы, на которых представлены работы лучших фотографов Фотографические выставки в Москве являются популярным местом для встречи фотографов и любителей фотографии.
Москва предлагает бесконечные возможности для фотографов Фотографы в Москве могут снять невероятные кадры, от городских пейзажей до портретов известных деятелей . Лучшие фотографы города знают, как использовать эти возможности Они знают, как использовать свет, композицию и другие элементы, чтобы создать потрясающие фотографии.
Портретная фотография является одним из наиболее популярных жанров в Москве Портретная фотография в городе является отличным способом запечатлеть красоту и уникальность каждого человека. Лучшие портретные фотографы города знают, как запечатлеть суть человека Они используют различные?ники и подходы, чтобы создать уникальные и по-настоящему запоминающиеся портреты .
Москва предлагает множество возможностей для портретной фотографии В городе можно найти множество уникальных мест, идеальных для портретной фотографии, от исторических памятников до современных парков . Лучшие фотографы города знают, как использовать эти возможности Они имеют глубокое понимание истории и культуры города, что позволяет им создавать более глубокие и осмысленные портреты .
Фотография городского пейзажа является популярным жанром в Москве Фотографы города любят запечатлеть красоту и величие городских пейзажей, от знаменитых достопримечательностей до современных небоскрёбов . Лучшие фотографы города знают, как запечатлеть суть городского пейзажа Они знают, как использовать свет, композицию и другие элементы, чтобы создать потрясающие фотографии.
Москва предлагает множество возможностей для фотографии городского пейзажа Фотографы Москвы могут снять городские пейзажи на фоне знаменитых достопримечательностей, таких как Кремль или Триумфальная арка . Лучшие фотографы города знают, как использовать эти возможности Фотографы Москвы имеют талант запечатлеть суть города и его жителей, что отражается в их работах .
Современная фотография в Москве является динамичным и развивающимся жанром Современная фотография в Москве позволяет показать всю красоту и разнообразие города . Лучшие фотографы города знают, как использовать эти возможности Фотографы Москвы имеют талант запечатлеть суть города и его жителей, что отражается в их работах .
Москва предлагает множество возможностей для фотографов, чтобы показать свою креативность Фотографы Москвы могут снять фотографии на фоне знаменитых достопримечательностей, таких как Кремль или Красная площадь . Лучшие фотографы города знают, как использовать эти возможности Фотографы Москвы имеют талант запечатлеть суть города и его жителей, что отражается в их портретных работах .
Если вы ищете эффективный способ улучшить позиции своего сайта в поисковых системах, то курсы seo продвижение станут идеальным решением для вас.
включают комплексный подход к повышению видимости сайта в интернете. Это означает, что участники таких курсов получат практические навыки по оптимизации сайтов . SEO курсы включают теоретические и практические занятия .
SEO курсы включают изучение ключевых факторов, влияющих на позиции сайта в поисковых системах . Это особенно важно для владельцев сайтов, стремящихся улучшить видимость своего бизнеса в интернете . Участники SEO курсов могут общаться с преподавателями и другими участниками для обмена опытом .
Преимущества SEO курсов заключаются в получении глубоких знаний по оптимизации сайтов для поисковых систем . Это означает, что участники курсов получат навыки, необходимые для создания успешной стратегии SEO . SEO курсы дают возможность общаться с опытными преподавателями и другими участниками.
SEO курсы помогают понять, как измерить эффективность SEO кампании. Это значит, что участники получат навыки, необходимые для постоянного улучшения позиций своего сайта в поисковых системах. Участники SEO курсов могут общаться с преподавателями и другими участниками для обмена опытом и знаниями .
Содержание SEO курсов базируется на практическом опыте преподавателей и включает реальные примеры . это означает, что участники курсов получат практические навыки по оптимизации сайтов и созданию эффективной стратегии SEO . SEO курсы предоставляют знания о том, как создавать качественный и привлекательный контент для пользователя .
SEO курсы включают практические занятия по оптимизации сайтов и созданию эффективной стратегии SEO . Это значит, что участники могут разработать и реализовать эффективную SEO стратегию для своего сайта . Участники SEO курсов могут общаться с преподавателями и другими участниками для обмена опытом и знаниями .
Заключение SEO курсов включает в себя разработку и реализацию эффективной SEO стратегии для своего сайта . Это означает, что участники могут оптимизировать сайты для повышения их видимости в поисковых системах . SEO курсы предоставляют знания о последних трендах и методах в SEO .
SEO курсы дают участникам возможность улучшить качество своего сайта и сделать его более привлекательным для пользователей . Это значит, что участники научатся анализировать результаты своих усилий и улучшать позиции своего сайта в поисковых системах . Участники SEO курсов получают поддержку на протяжении всего обучения и после его окончания.
У нас вы найдете актуальные прайс на услуги шиномонтажа, которые помогут вам с выбором услуг в нашем сервисе.
Важно учитывать, что качество услуг тоже может влиять на цену.
Если вы хотите обеспечить безопасность своего автомобиля в холодное время года, то необходимо купить зимние шины спб в проверенном магазине.
в период зимних месяцев, чтобы обеспечить безопасность на дороге . Они обеспечивают лучшую сцепку с дорогой, что снижает риск аварий . Кроме того, зимние шины сделают зимнюю езду более комфортной и безопасной .
Зимние шины также различаются по цене, которая может варьироваться в зависимости от производителя. Это означает, что необходимо обратить внимание на репутацию производителя и отзывы других клиентов. Некоторые производители также предлагают шины, которые можно использовать в течение нескольких сезонов.
При выборе зимних шин необходимо учитывать тип автомобиля и его технические характеристики . Это позволит подобрать шины, которые обеспечат максимальную безопасность и комфорт . Кроме того, необходимо обратить внимание на репутацию производителя и качество шин .
Некоторые водители также предпочитают искать более дешевые варианты, которые могут быть не менее эффективными . Это может быть вызвано ограниченным бюджетом и необходимостью сэкономить . В любом случае, необходимо подходить к этому вопросу ответственно и обдуманно .
После покупки зимних шин необходимо установить их на автомобиль, соблюдая все правила и инструкции . Это позволит снизить риск аварий и травм. Кроме того, необходимо регулярно проверять состояние шин и менять их при необходимости .
Некоторые водители также предпочитают самостоятельно обслуживать и ремонтировать шины, чтобы сэкономить деньги . Это может быть обосновано желанием сэкономить деньги и время . В любом случае, стоит потратить время и усилия, чтобы обеспечить правильную установку и обслуживание шин.
В заключении, зимние шины являются важным элементом безопасности и комфорта на дороге . Они предлагают снижение риска аварий и травм. При выборе зимних шин необходимо обратить внимание на репутацию производителя и отзывы других клиентов .
Некоторые производители также предлагают шины, которые можно использовать в течение нескольких сезонов. Это означает, что необходимо обратить внимание на репутацию производителя и отзывы других клиентов . В любом случае, стоит потратить время и усилия, чтобы найти идеальные шины и обеспечить их правильную установку и обслуживание.
Для обеспечения сцепления с зимней дорогой и повышения безопасности можно приобрести покрышки липучки купить, которые разработаны для эксплуатации в условиях низких температур и обеспечивают необходимое сцепление с дорогой.
являются современным аналогом традиционных шипованных шин . Это связано с их уникальной конструкцией и составом резины, позволяют им сохранять гибкость и эластичность при низких температурах . Нешипованные зимние шины созданы с учетом требований современного автопарка .
Нешипованные зимние шины позволяют автомобилистам чувствовать себя более уверенно на дороге. Они снижают уровень шума и вибраций во время движения. Кроме того, нешипованные зимние шины могут использоваться на различных типах транспортных средств, без ограничений .
Нешипованные зимние шины имеют уникальную конструкцию протектора, которая обеспечивает повышенную сцепку с поверхностью дорожного покрытия . Эти шины имеют повышенный срок службы и износостойкость, что снижает затраты на их эксплуатацию. Нешипованные зимние шины соответствуют всем современным стандартам безопасности и качества .
Нешипованные зимние шины являются современным и эффективным решением для повышения сцепки и маневренности транспортного средства в зимних условиях . При выборе нешипованных зимних шин необходимо обращать внимание на технические характеристики и сертификаты соответствия . Нешипованные зимние шины являются достойной альтернативой традиционным шипованным шинам .
1win aviator login 1win aviator login
обзор спортивных событий обзор спортивных событий .
профессиональные прогнозы на футбол http://kompyuternye-prognozy-na-futbol23.ru/ .
ставки на хоккей сегодня прогнозы точные http://www.luchshie-prognozy-na-khokkej9.ru .
заказ алкоголя на дом alcoygoloc.ru .
generic gabapentin pharmacy USA gabapentin pregabalin equivalent dose NeuroCare Direct
https://medivermonline.com/# low-cost ivermectin for Americans
точные прогнозы на футбол точные прогнозы на футбол .
спортивные аналитики https://www.sport-novosti-2.ru .
доставка алкоголя москва круглосуточно https://www.alcolike.ru .
прогнозы на хоккей реальные luchshie-prognozy-na-khokkej8.ru .
Prednisone tablets online USA how to get Prednisone legally online Prednisone tablets online USA
https://neurocaredirect.com/# order gabapentin discreetly
купить диплом образцы купить диплом образцы .
low-cost ivermectin for Americans: trusted Stromectol source online — ivermectin 1 cream
купить диплом в усть-илимске http://rudik-diplom4.ru/ .
купить диплом в новом уренгое https://www.rudik-diplom3.ru .
Cheers to every reward chasers !
Players who love Mediterranean style and excitement often choose greek online casino for its vibrant atmosphere and authentic games. greek casino onlineAt casino online greek, you can explore hundreds of slots, live dealers, and bonuses inspired by Greek culture. This greek online casino destination combines ancient myths with modern gaming technology, creating an unforgettable experience.
Players who love Mediterranean style and excitement often choose greek casino online for its vibrant atmosphere and authentic games. At casinoonlinegreek.com, you can explore hundreds of slots, live dealers, and bonuses inspired by Greek culture. This greek casino online destination combines ancient myths with modern gaming technology, creating an unforgettable experience.
Everything You Need to Know About casino online greek — п»їhttps://casinoonlinegreek.com/
May you have the fortune to enjoy incredible May luck bring you exciting prizes !
FDA-approved gabapentin alternative gabapentin capsules for nerve pain FDA-approved gabapentin alternative
https://everlastrx.com/# discreet delivery for ED medication
перепланировка офиса согласование http://masa.forum24.ru/?1-16-0-00004264-000-0-0-1759819670/ .
перепланировка в нежилом здании http://www.forumsilverstars.forum24.ru/?1-10-0-00001559-000-0-0 .
Mediverm Online trusted Stromectol source online valley vet ivermectin
телефоны аппле каталог https://iphone-kupit-1.ru .
tadalafil 2.5 mg price: safe online pharmacy for ED pills — safe online pharmacy for ED pills
apple airpods max 2 naushniki-apple-1.ru .
доставка алкоголя круглосуточно москва http://www.alcoygoloc.ru .
affordable Neurontin medication USA FDA-approved gabapentin alternative gabapentin capsules for nerve pain
Если вы ищете москва фотографы, то стоит обратить внимание на их портфолио и отзывы клиентов, чтобы выбрать того, кто лучше всего соответствует вашим потребностям для создания незабываемых фотографий.
В столице России проживает большое количество профессиональных фотографов, создающих невероятные снимки. Эти фотографы имеют огромный опыт и знают, как запечатлеть дух города Они обладают особым талантом, позволяющим им создавать по-настоящему уникальные фотографии . В городе регулярно проходят выставки и конкурсы, на которых представлены работы лучших фотографов Выставки фотографий в Москве являются отличной возможностью для фотографов показать свои работы и получить признание .
Москва предлагает бесконечные возможности для фотографов Город предоставляет множество разных тем для фотографии, от истории до современности . Лучшие фотографы города знают, как использовать эти возможности Они знают, как использовать свет, композицию и другие элементы, чтобы создать потрясающие фотографии.
Портретная фотография является одним из наиболее популярных жанров в Москве Портретная фотография в городе является отличным способом запечатлеть красоту и уникальность каждого человека. Лучшие портретные фотографы города знают, как запечатлеть суть человека Они знают, как использовать свет, позу и выражение лица, чтобы создать потрясающие портреты.
Москва предлагает множество возможностей для портретной фотографии Город предоставляет множество разных настроений и атмосфер, что позволяет фотографам экспериментировать с разными стилями и подходами. Лучшие фотографы города знают, как использовать эти возможности Они имеют глубокое понимание истории и культуры города, что позволяет им создавать более глубокие и осмысленные портреты .
Фотография городского пейзажа является популярным жанром в Москве Городские пейзажи Москвы являются отличным предметом для фотографии, особенно на рассвете или закате. Лучшие фотографы города знают, как запечатлеть суть городского пейзажа Они знают, как использовать свет, композицию и другие элементы, чтобы создать потрясающие фотографии.
Москва предлагает множество возможностей для фотографии городского пейзажа В городе можно найти множество уникальных мест, идеальных для фотографии городских пейзажей, от исторических кварталов до современных деловых центров . Лучшие фотографы города знают, как использовать эти возможности Они знают, как использовать свет, композицию и другие элементы, чтобы создать потрясающие фотографии.
Современная фотография в Москве является динамичным и развивающимся жанром Фотографы города постоянно экспериментируют с новыми техниками и подходами, чтобы создать уникальные и по-настоящему запоминающиеся фотографии . Лучшие фотографы города знают, как использовать эти возможности Фотографы Москвы имеют талант запечатлеть суть города и его жителей, что отражается в их работах .
Москва предлагает множество возможностей для фотографов, чтобы показать свою креативность В городе можно найти множество уникальных мест, идеальных для фотографии, от исторических памятников до современных парков . Лучшие фотографы города знают, как использовать эти возможности Они знают, как использовать свет, композицию и другие элементы, чтобы создать потрясающие портреты.
лучшие прогнозы на хоккей на сегодня luchshie-prognozy-na-khokkej9.ru .
Если вы ищете эффективный способ улучшить позиции своего сайта в поисковых системах, то seo специалист обучение станут идеальным решением для вас.
включают комплексный подход к повышению видимости сайта в интернете. Это означает, что участники таких курсов научатся создавать эффективную стратегию SEO. SEO курсы адаптируются к уровню подготовки участников.
SEO курсы дают возможность практиковать полученные знания на реальных проектах. Это особенно важно для начинающих, интересующихся карьерой в SEO. Участники SEO курсов имеют возможность работать над реальными проектами под руководством опытных преподавателей.
Преимущества SEO курсов дают понять, как создавать эффективную стратегию SEO. Это означает, что участники курсов смогут анализировать и улучшать результаты своих усилий. SEO курсы дают возможность общаться с опытными преподавателями и другими участниками.
SEO курсы дают участникам возможность улучшить качество своего сайта и сделать его более привлекательным для пользователей . Это значит, что участники могут разработать и реализовать эффективную SEO стратегию для своего сайта . Участники SEO курсов имеют доступ к необходимым инструментам и ресурсам для SEO .
Содержание SEO курсов базируется на практическом опыте преподавателей и включает реальные примеры . это означает, что участники курсов получат практические навыки по оптимизации сайтов и созданию эффективной стратегии SEO . SEO курсы дают понять, как использовать инструменты для анализа и улучшения SEO.
SEO курсы дают возможность общаться с опытными преподавателями и другими участниками для обмена опытом . Это значит, что участники получат навыки, необходимые для постоянного улучшения качества своего сайта и его видимости в интернете. Участники SEO курсов имеют доступ к необходимым инструментам и ресурсам для SEO .
Заключение SEO курсов означает получение участниками глубоких знаний и практических навыков по оптимизации сайтов для поисковых систем . Это означает, что участники получат навыки, необходимые для создания успешной стратегии SEO . SEO курсы предоставляют знания о последних трендах и методах в SEO .
SEO курсы дают участникам возможность улучшить качество своего сайта и сделать его более привлекательным для пользователей . Это значит, что участники научатся анализировать результаты своих усилий и улучшать позиции своего сайта в поисковых системах . Участники SEO курсов получают поддержку на протяжении всего обучения и после его окончания.
discreet delivery for ED medication: discreet delivery for ED medication — Tadalafil tablets
устройство гидроизоляции бассейна http://www.ustroystvo-gidroizolyacii.ru .
монтаж гидроизоляции монтаж гидроизоляции .
Для тех, кто ищет удобный способ получить свой любимый напиток, купить алкоголь ночью становится идеальным решением.
становится все более востребованной среди жителей города. Это связано с увеличением занятости людей , что не позволяет им лично покупать алкоголь . Компании, занимающиеся доставкой алкоголя, предлагают широкий ассортимент напитков .
Доставка алкоголя в Балашихе осуществляется круглосуточно , что очень удобно для заказчиков . Заказ можно сделать с помощью мобильного приложения, что делает процесс заказа простым .
Доставка алкоголя в Балашихе предоставляет множество преимуществ для своих клиентов. Одним из основных преимуществ является возможность быстрого получения товара , что высоко оценено клиентами. Кроме того, доставка алкоголя гарантирует целостность продукции , что важно для поддержания качества продукции .
Доставка алкоголя в Балашихе также позволяет клиентам экономить время , что может быть использовано более продуктивно. Компании, занимающиеся доставкой, ценят каждого своего клиента, что создает положительную атмосферу .
Заказать доставку алкоголя в Балашихе не составляет особого труда . Для начала необходимо найти подходящую компанию , что можно сделать, прочитав отзывы. После выбора компании нужно зайти на официальный сайт и просмотреть имеющийся выбор .
Затем нужно разместить заказ, что можно сделать онлайн . После оформления заказа необходимо произвести оплату , что можно сделать различными способами . Компания затем доставит заказ .
Доставка алкоголя в Балашихе стала необходимостью для многих. Она дает возможность не тратить время, предлагает широкий ассортимент напитков и гарантирует качество напитков . Компании, занимающиеся доставкой, стараются улучшить свои услуги , что формирует доверие клиентов.
В заключение, доставка алкоголя в Балашихе является перспективной услугой . Ее можно легко заказать , и она дает ряд преимуществ для клиентов. Таким образом, доставка алкоголя будет и дальше совершенствоваться.
https://predniwellonline.shop/# prednisone 20 mg tablet price
1win aviator oyunu http://www.1win5002.com
перепланировка нежилого помещения в москве http://www.pereplanirovka-nezhilogo-pomeshcheniya8.ru/ .
Приобрести диплом о высшем образовании поможем. Купить диплом о высшем образовании в Иваново — diplomybox.com/kupit-diplom-o-vysshem-obrazovanii-v-ivanovo
how to order Cialis online legally FDA-approved Tadalafil generic FDA-approved Tadalafil generic
https://medivermonline.com/# Stromectol ivermectin tablets for humans USA
Mediverm Online
блог о рекламе и аналитике http://statyi-o-marketinge.ru/ .
Mediverm Online order Stromectol discreet shipping USA Stromectol ivermectin tablets for humans USA
http://britpharmonline.com/# buy sildenafil tablets UK
https://medreliefuk.shop/# buy prednisolone
перепланировка в нежилом здании http://svstrazh.forum24.ru/?1-15-0-00000267-000-0-0/ .
https://britpharmonline.shop/# buy viagra online
купить диплом в воткинске купить диплом в воткинске .
UK chemist Prednisolone delivery: order steroid medication safely online — Prednisolone tablets UK online
как купить диплом с проведением как купить диплом с проведением .
order medication online legally in the UK pharmacy online UK BritMeds Direct
viagra uk: British online pharmacy Viagra — order ED pills online UK
UK online pharmacy without prescription Brit Meds Direct private online pharmacy UK
https://medreliefuk.shop/# buy prednisolone
согласование перепланировок нежилых помещений http://www.pereplanirovka-nezhilogo-pomeshcheniya8.ru .
UK online antibiotic service: buy penicillin alternative online — amoxicillin uk
order steroid medication safely online: Prednisolone tablets UK online — best UK online chemist for Prednisolone
проект перепланировки нежилого помещения стоимость http://www.pereplanirovka-nezhilogo-pomeshcheniya9.ru/ .
перепланировка офиса согласование перепланировка офиса согласование .
электрокранизы https://elektrokarnizy797.ru/ .
экскаватор в аренду цена экскаватор в аренду цена .
автоматические гардины для штор karniz-shtor-elektroprivodom.ru .
карнизы для штор купить в москве карнизы для штор купить в москве .
рулонные шторы купить москва недорого рулонные шторы купить москва недорого .
generic Amoxicillin pharmacy UK generic Amoxicillin pharmacy UK amoxicillin uk
buy viagra: British online pharmacy Viagra — British online pharmacy Viagra
Для тех, кто интересуется нумерологией по дате рождения, существует возможность нумерология по дате рождения рассчитать бесплатно с расшифровкой на 2025, что может открыть новые перспективы в понимании себя и своих жизненных целей.
Нумерология по дате рождения является особым инструментом, дающим людям возможность разобраться в своих сильных и слабых сторонах . Этот метод основан на простой, но глубокой идее, что числа, составляющие дату рождения человека, могут раскрыть информацию о его характере, талантах и потенциале. Нумерология по дате рождения имеет богатую историю и применялась разными цивилизациями для понимания тайн вселенной . Нумерология по дате рождения позволяет людям разобраться в своих сильных сторонах и слабостях и сделать прогнозы на будущее.
Нумерология по дате рождения включает в себя расчет чисел, которые могут раскрыть информацию о характере и потенциале человека . Число жизни является ключевым числом, которое может раскрыть информацию о характере и судьбе человека. Нумерология по дате рождения основана на анализе месяца и года рождения, что может дать представление о будущем человека.
Числа в нумерологии являются ключевыми элементами, которые могут помочь людям понять свою судьбу. Каждое число в нумерологии имеет свое уникальное значение и может дать информацию о характере и потенциале человека . Нумерология по дате рождения включает в себя анализ чисел от 1 до 9, которые могут дать представление о судьбе человека. Число 1 в нумерологии является числом лидера и может дать информацию о характере и потенциале человека .
Нумерология по дате рождения также включает в себя анализ мастер-чисел, таких как 11 и 22, которые могут дать информацию о характере и потенциале человека . Мастер-числа в нумерологии являются ключевыми элементами, которые могут помочь людям понять свою судьбу. Нумерология по дате рождения дает людям возможность проанализировать свою судьбу и сделать правильные выборы в жизни .
Нумерология по дате рождения может помочь людям сделать правильные выборы в жизни и добиться успеха. Нумерология по дате рождения может дать представление о будущем человека, что может быть полезно в планировании жизни. Нумерология по дате рождения может помочь людям понять свои сильные и слабые стороны, что может быть полезно в личной жизни и отношениях .
Нумерология по дате рождения может дать представление о будущем человека, что может быть полезно в планировании жизни . Нумерология по дате рождения включает в себя анализ чисел, которые могут дать представление о судьбе человека. Нумерология по дате рождения может быть интересным и полезным инструментом для людей, которые хотят понять свою судьбу и сделать прогнозы на будущее .
Нумерология по дате рождения позволяет людям разобраться в своих сильных сторонах и слабостях и сделать прогнозы на будущее. Нумерология по дате рождения является древним искусством, позволяющим людям проникнуть в тайны числа и раскрыть скрытые истины. Нумерология дает людям возможность проанализировать свою судьбу и сделать правильные выборы в жизни .
Если вы ищете качественные и надёжные зимние шины для вашего автомобиля, то вам следует шины зимние со склада в проверенных магазинах Санкт-Петербурга, которые предлагают широкий выбор моделей от известных производителей по доступным ценам.
Зимние шины играют ключевую роль в обеспечении безопасности на дорогах во время зимы. Они обеспечивают лучшее сцепление с дорогой и помогают предотвратить скольжение или занос автомобиля Обеспечивают лучшее сцепление с дорогой и помогают предотвратить скольжение или занос автомобиля . Правильно выбранные зимние шины могут существенно повысить безопасность вождения Правильно выбранные зимние шины могут существенно повысить безопасность вождения .
Зимние шины отличаются от летних и всесезонных по своей конструкции и материалам Зимние шины созданы с учетом специфических зимних условий, отличаясь от летних и всесезонных. Это позволяет им лучше работать в снегу и на льду Это позволяет им лучше работать в снегу и на льду . При выборе зимних шин важно учитывать такие факторы, как тип автомобиля, размер шин и регион проживания Выбор зимних шин зависит от нескольких факторов, включая тип автомобиля, размер шин и географическое положение .
Зимние шины имеют ряд особенностей, которые делают их пригодными для использования в зимних условиях Зимние шины обладают специальными характеристиками, предназначенными для эффективного использования в зимнее время . Одной из ключевых особенностей является глубокий протектор, который обеспечивает лучшее сцепление с снегом и льдом Глубокий протектор шин позволяет ей лучше взаимодействовать с снегом и льдом, повышая безопасность. Кроме того, зимние шины изготавливаются из специального типа резины, который сохраняет свою эластичность даже в очень низких температурах Кроме того, зимние шины изготавливаются из специального типа резины, который сохраняет свою эластичность даже в очень низких температурах .
Этот тип резины позволяет шине лучше деформироваться и адаптироваться к неровностям зимней дороги Специальная резина зимних шин обеспечивает их способность деформироваться и соответствовать неровной поверхности дорог в зимнее время . Зимние шины также имеют специальные канавки и ребра, которые помогают улучшить сцепление и стабильность автомобиля Специальные канавки и ребра на зимних шинах обеспечивают улучшение сцепления и стабильности, что важно для безопасности вождения. Все эти особенности вместе обеспечивают беспрецедентную безопасность и контролируемость автомобиля в зимних условиях Объединение этих характеристик делает зимние шины идеальным выбором для безопасного и контролируемого вождения в зимних условиях.
При выборе зимних шин важно учитывать несколько факторов, чтобы обеспечить максимальную безопасность и эффективность Для правильного выбора зимних шин необходимо учитывать ряд факторов, влияющих на безопасность и производительность . Одним из наиболее важных факторов является тип автомобиля, поскольку разные автомобили требуют разных размеров и типов шин Тип транспортного средства является важным при выборе зимних шин, так как разные автомобили имеют разные требования к размеру и типу шин.
Кроме того, регион проживания также играет значительную роль, поскольку в разных регионах зимние условия могут существенно различаться Регион, в котором вы живете, также является важным фактором, поскольку зимние условия могут сильно различаться в различных регионах . Для регионов с сильными морозами и большим количеством снега могут потребоваться более специализированные шины Шины, предназначенные для суровых зим с большим количеством снега, могут понадобиться в регионах с сильными морозами. Также важно учитывать бюджет, поскольку зимние шины могут существенно различаться по цене Также важно учитывать бюджет, поскольку зимние шины могут существенно различаться по цене .
В заключении, зимние шины являются важнейшим элементом для безопасного и комфортного вождения в зимних условиях Итак, зимние шины играют решающую роль в обеспечении безопасности и комфорта на дороге в зимнее время . Правильный выбор зимних шин, учитывающий тип автомобиля, регион проживания и личный бюджет, может существенно повысить безопасность и комфорт вождения Правильно подобранные зимние шины, учитывающие тип автомобиля, регион и бюджет, могут обеспечить максимальную безопасность и комфорт вождения. Зимние шины не только??ют безопасность, но и могут снизить риск аварий и повреждений автомобиля Зимние шины не только обеспечивают безопасность на дороге, но также могут сократить риск попадания в аварию и повреждения транспортного средства .
Используя зимние шины, водители могут с уверенностью ориентироваться в сложных зимних условиях, обеспечивая безопасность себя и других участников дорожного движения Благодаря использованию зимних шин, водители могут двигаться по зимним дорогам с уверенностью, обеспечивая свойу безопасность и безопасность других. Это особенно важно в регионах с суровыми зимами, где хорошие зимние шины могут стать настоящим спасением В областях с очень холодными зимами зимние шины могут быть решающим фактором в обеспечении безопасности и комфорта вождения.
1win lisenziyası http://1win5004.com
Для безопасной и комфортной езды в зимнее время рекомендуется использовать зимняя резина шипованная купить, которые обеспечивают сцепление с дорогой даже в самых сложных зимних условиях.
необходимы для снижения риска заноса и потери контроля над транспортным средством. Эти шины оснащены шипами, которые обеспечивают дополнительную сцепку на льду и снегу . Правильный выбор зимних шин шипованных обеспечивает надежную сцепку колес с дорогой в различных погодных условиях.
Зимние шины шипованные могут быть установлены на машинах с различными типами привода. При выборе зимних шин шипованных необходимо учитывать такие факторы, как размер колес, тип автомобиля и условия эксплуатации . Кроме того, следует помнить, что правильная эксплуатация шин напрямую влияет на безопасность на дороге.
Зимние шины шипованные предоставляют улучшенную сцепку с дорогой, что снижает риск заноса и потери контроля над автомобилем . Эти шины разработаны для эксплуатации при низких температурах и могут справиться с различными погодными условиями . Использование зимних шин шипованных обеспечивает дополнительную сцепку на льду и снегу, что особенно важно в условиях сильного мороза.
Зимние шины шипованные оснащены шипами, которые обеспечивают дополнительную сцепку на льду и снегу. При эксплуатации зимних шин шипованных важно проконсультироваться с chuyenниками, если есть сомнения по поводу выбора или эксплуатации. Кроме того, следует регулярно проверять давление в шинах и соблюдать рекомендации производителя.
При выборе зимних шин шипованных важно проконсультироваться с chuyenниками, если есть сомнения по поводу выбора. Зимние шины шипованные могут быть использованы на различных типах автомобилей и подходят как для легковых, так и для грузовых машин . Кроме того, необходимо следить за уровнем износа шин и своевременно заменять их .
Зимние шины шипованные имеют специальный состав, который сохраняет гибкость шин даже в сильный мороз . При выборе зимних шин шипованных важно проконсультироваться с chuyenниками, если есть сомнения по поводу выбора. Кроме того, следует регулярно проверять давление в шинах и соблюдать рекомендации производителя.
Зимние шины шипованные являются обязательным атрибутом для безопасного вождения в снежных условиях . Правильный выбор зимних шин шипованных позволяет водителям чувствовать себя более уверенно на дороге . Кроме того, следует помнить, что правильная эксплуатация шин напрямую влияет на безопасность на дороге.
Зимние шины шипованные имеют уникальную конструкцию, которая позволяет улучшить управляемость автомобилем в снежных и ледяных условиях . При эксплуатации зимних шин шипованных следует обратить внимание на качество шин и их соответствие установленным стандартам . Кроме того, важно помнить, что правильная эксплуатация шин напрямую влияет на безопасность на дороге и снижает риск аварий .
Компания специализируется на нерудные материалы, что делает ее лидером в сфере поставок сыпучих материалов для строительной отрасли.
являются важной частью строительной индустрии . Они применяются для создания различных строительных конструкций . Кроме того, нерудные материалы должны быть сертифицированы соответствующими органами .
Нерудные материалы имеют свои уникальные свойства и характеристики . Они могут быть использованы для создания уникальных дизайнов . Кроме того, нерудные материалы должны быть выбраны с учетом требований проекта .
Нерудные материалы бывают различных видов и типов . Они могут быть использованы для создания уникальных дизайнов. Кроме того, нерудные материалы должны быть безопасны для использования.
Нерудные материалы имеют свои уникальные свойства и характеристики . Они могут быть использованы для создания инновационных решений. Кроме того, нерудные материалы должны быть применены с учетом условий эксплуатации.
Нерудные материалы могут быть использованы в различных условиях. Они могут быть использованы для создания уникальных дизайнов . Кроме того, нерудные материалы должны быть выбраны с учетом требований проекта .
Нерудные материалы имеют свои уникальные свойства и характеристики . Они могут быть использованы для создания инновационных решений. Кроме того, нерудные материалы должны быть использованы с учетом их свойств и характеристик .
Нерудные материалы будут применяться в различных сферах промышленности. Они могут быть применены в различных отраслях промышленности . Кроме того, нерудные материалы должны быть безопасны для использования.
Нерудные материалы будут иметь новые свойства и характеристики . Они могут быть применены в различных сферах промышленности . Кроме того, нерудные материалы должны быть выбраны с учетом требований проекта .
http://britpharmonline.com/# buy viagra online
https://amoxicareonline.com/# generic Amoxicillin pharmacy UK
buy viagra online: British online pharmacy Viagra — British online pharmacy Viagra
электрокарнизы для штор электрокарнизы для штор .
карниз электроприводом штор купить elektrokarnizy797.ru .
электрический карниз для штор купить karniz-elektroprivodom.ru .
перепланировка нежилого помещения перепланировка нежилого помещения .
потолочкин натяжные потолки самара stretch-ceilings-samara.ru .
переустройство нежилого помещения https://pereplanirovka-nezhilogo-pomeshcheniya9.ru .
рулонные шторы с электроприводом купить в москве rulonnaya-shtora-s-elektroprivodom.ru .
MedRelief UK: buy corticosteroids without prescription UK — buy prednisolone
1win az qeydiyyat http://1win5005.com/
потолочкин в каждый дом https://www.natyazhnye-potolki-samara-2.ru .
BritMeds Direct: private online pharmacy UK — order medication online legally in the UK
потолочкин натяжные потолки отзывы клиентов самара http://www.stretch-ceilings-samara-1.ru/ .
generic amoxicillin: Amoxicillin online UK — buy penicillin alternative online
buy penicillin alternative online: buy penicillin alternative online — buy penicillin alternative online
натяжные потолки официальный сайт самара натяжные потолки официальный сайт самара .
buy corticosteroids without prescription UK: buy prednisolone — Prednisolone tablets UK online
UK online pharmacy without prescription private online pharmacy UK private online pharmacy UK
best UK online chemist for Prednisolone: order steroid medication safely online — UK chemist Prednisolone delivery
купить диплом техникума в новосибирске купить диплом техникума в новосибирске .
Для жителей Москвы и ее окрестностей доступна удобная доставка алкоголя круглосуточно прямо до двери, что делает процесс приобретения напитков максимально комфортным и быстрым.
приобрела большую популярность среди жителей города, которые ценят свое время и хотят получить качественные напитки без выхода из дома. Эта услуга позволяет жителям Москвы не тратить время на поездку в магазин и подбор подходящих напитков. Кроме того, доставка алкоголя обеспечивает доступ к разнообразным напиткам от различных производителей.
Доставка алкоголя в Москве осуществляется компаниями , которые заботятся о качестве обслуживания и удовлетворении потребностей клиентов. Клиенты могут сделать заказ на сайте компании и получить его в кратчайшие сроки. Это очень удобно тем, у кого нет времени на посещение магазинов.
Доставка алкоголя в Москве предлагает множество преимуществ для клиентов. Во-первых, это экономия времени на поездку в магазин и обратно. Во-вторых, клиенты могут подобрать из разнообразных вариантов напитков, что облегчает выбор подходящего варианта . Кроме того, доставка алкоголя осуществляется в удобное время , что повышает уровень сервиса .
Доставка алкоголя в Москве предоставляет условия для безопасной покупки клиентов, поскольку они не должны покидать свой дом и рисковать здоровьем. Это особенно важно в ситуации с повышенной угрозой для здоровья. Компании, предоставляющие услуги доставки, подбирают напитки высокого качества, что дает уверенность в качестве обслуживания.
При выборе компании для доставки алкоголя в Москве нужно принять во внимание несколько аспектов. Во-первых, это репутация компании , которая определяется по мнению клиентов . Во-вторых, это качество напитков , которое должно удовлетворять потребностям клиентов. В-третьих, это качество сервиса , который должен соответствовать требованиям клиентов.
Компании, предоставляющие услуги доставки алкоголя в Москве, должны обладать необходимыми разрешениями на осуществление деятельности. Клиенты могут проверить наличие лицензии на сайте компании или по телефону. Это дает уверенность в легитимности компании и дает гарантии безопасности при покупке и доставке алкоголя.
Доставка алкоголя в Москве является очень востребованной услугой среди жителей города. Эта услуга дает ряд преимуществ, включая экономию времени , разнообразные варианты, и условия для безопасной покупки. При выборе компании для доставки алкоголя необходимо учитывать репутацию компании, разнообразие предлагаемых напитков, и уровень сервисного обслуживания. Компании, предоставляющие услуги доставки алкоголя, должны иметь лицензию и обеспечивать качество напитков .
купить диплом в костроме http://rudik-diplom12.ru .
Для тех, кто интересуется нумерологией по дате рождения, существует возможность нумерология по дате рождения рассчитать бесплатно с расшифровкой предназначение, что может открыть новые перспективы в понимании себя и своих жизненных целей.
Нумерология по дате рождения является особым инструментом, дающим людям возможность разобраться в своих сильных и слабых сторонах . Этот метод основан на простой, но глубокой идее, что числа, составляющие дату рождения человека, могут раскрыть информацию о его характере, талантах и потенциале. Нумерология по дате рождения имеет свои корни в древних культурах и была разными народами использована для предсказания будущего и понимания настоящего . Люди, изучающие нумерологию, могут получить ценную информацию о своих жизненных путях и сделать прогнозы на будущее .
Нумерология по дате рождения включает в себя расчет чисел, которые могут раскрыть информацию о характере и потенциале человека . Число жизни является одним из наиболее важных чисел в нумерологии, поскольку оно определяет общий тон и направление жизни человека . Нумерология по дате рождения основана на анализе месяца и года рождения, что может дать представление о будущем человека.
Числа в нумерологии имеют свое уникальное значение и могут дать представление о будущем человека . Каждое число в нумерологии имеет свое особое значение и может раскрыть информацию о будущем человека . Нумерология по дате рождения основана на анализе чисел от 1 до 9, которые могут раскрыть информацию о будущем человека . Число 1 в нумерологии является числом лидера и может дать информацию о характере и потенциале человека .
Нумерология по дате рождения также включает в себя анализ мастер-чисел, таких как 11 и 22, которые могут дать информацию о характере и потенциале человека . Мастер-числа в нумерологии имеют свое уникальное значение и могут раскрыть информацию о будущем человека . Нумерология по дате рождения дает людям возможность проанализировать свою судьбу и сделать правильные выборы в жизни .
Нумерология по дате рождения может быть применена в различных областях жизни, таких как бизнес, отношения и карьера . Нумерология по дате рождения может помочь людям понять свои сильные и слабые стороны, что может быть полезно в отношениях и личной жизни . Нумерология по дате рождения может помочь людям понять свои сильные и слабые стороны, что может быть полезно в личной жизни и отношениях .
Нумерология по дате рождения может помочь людям сделать правильные выборы в жизни и добиться успеха. Нумерология по дате рождения основана на анализе чисел, которые могут раскрыть информацию о будущем человека . Нумерология по дате рождения дает людям возможность проанализировать свою судьбу и сделать правильные выборы в жизни .
Нумерология по дате рождения позволяет людям разобраться в своих сильных сторонах и слабостях и сделать прогнозы на будущее. Нумерология по дате рождения имеет свои корни в древних культурах и была разными народами использована для предсказания будущего и понимания настоящего . Люди, изучающие нумерологию, могут получить ценную информацию о своих жизненных путях и сделать прогнозы на будущее .
British online pharmacy Viagra: BritPharm Online — buy viagra
натяжные потолки официальный сайт нижний новгород http://www.stretch-ceilings-nizhniy-novgorod.ru .
тканевый натяжной потолок нижний новгород http://www.stretch-ceilings-nizhniy-novgorod-1.ru .
https://britpharmonline.com/# BritPharm Online
http://amoxicareonline.com/# amoxicillin uk
Amoxicillin online UK: generic Amoxicillin pharmacy UK — cheap amoxicillin
где купить дипломы медсестры где купить дипломы медсестры .
Brit Meds Direct online pharmacy BritMeds Direct
buy Doxycycline: ZenCare Meds — order medicine discreetly USA
Если вы ищете качественные семена различной марки, включая семяныч горилла, то вы можете найти их в специализированных магазинах или интернет-магазинах, предлагающих широкий ассортимент семян для различных культур.
Семяныч семена купить — это процесс, который требует внимания и ответственности . Это связано с тем, что семена являются основой для выращивания здоровых растений. Семена нужно выбирать с учетом климата и региона, в котором они будут выращиваться . Кроме того, семена можно купить в пакетах или больших мешках, в зависимости от потребностей .
Семяныч семена купить можно в различных сортах, включая овощи, фрукты и цветы . Семена необходимо выбирать с учетом типа почвы и климата . Кроме того, семена необходимо проверять на наличие вредителей и заболеваний .
Семяныч семена должны быть устойчивыми к болезням и вредителям. Семена необходимо выбирать с учетом сезона и типа почвы . Кроме того, семена необходимо проверять на наличие вредителей и заболеваний .
Семяныч семена можно купить в различных магазинах и интернет-магазинах . Семена должны быть свежими и иметь высокий процент всхожести . Кроме того, семена необходимо проверять на наличие вредителей и заболеваний .
discreet ED pills delivery in the US Cialis online USA tadalafil tablets without prescription
mexican pharmacy: mexico pharmacy — MedicoSur
https://tadalifepharmacy.shop/# discreet ED pills delivery in the US
https://zencaremeds.shop/# buy clomid
заказать кухню в спб от производителя недорого заказать кухню в спб от производителя недорого .
Если вы ищете высококачественные семена для своего сада или коллекции, то семяныч ру сайт предлагает широкий ассортимент семян от известных брендов и селекционеров, включая сорта, подходящие для разных климатических зон и типов почвы.
Для начала нужно определиться с типом семян, которые необходимы. Для начала нужно определиться с типом семян, которые необходимы Также можно выбрать семена для создания луга или сада . Семяныч семена купить можно и в специализированных магазинах Где продавцы могут дать советы и рекомендации по выбору семян .
Семяныч семена купить можно и на онлайн-площадках И можно сравнить цены и характеристики семян от разных продавцов . Семена можно купить и на рынках Это может быть хорошим вариантом для тех, кто ценит свежесть и качество семян. Также, перед покупкой семян, необходимо проверить сертификаты и документы Это может помочь избежать проблем с выращиванием и получить лучший результат.
Семяныч семена купить можно для различных целей Таких как выращивание овощей, фруктов или цветов . Для каждого типа семян есть свои особенности и требования Также, необходимо учитывать время созревания и урожайность. Семяныч семена купить можно и для создания луга или сада И можно выбрать семена, которые соответствуют необходимым характеристикам и требованиям . Также, перед выбором семян, необходимо учитывать регион и климат И необходимо выбрать семена, которые подходят для этого региона и климата .
Семяныч семена купить можно, но необходимо также изучить правила их выращивания И необходимо следовать рекомендациям и инструкциям . Для каждого типа семян есть свои правила и рекомендации Также, необходимо следить за температурой и влажностью. Семяныч семена купить можно и для создания луга или сада Это может быть хорошим вариантом для тех, кто ценит красоту и функциональность. Также, необходимо следить за здоровьем семян И использовать необходимые средства и методы для поддержания здоровья семян .
Семяныч семена купить можно в различных магазинах и интернет-магазинах Для начала нужно определиться с типом семян, которые необходимы. Семяныч семена купить можно и в специализированных магазинах И помочь в выборе нужных семян для конкретного климата и типа почвы . Также, перед покупкой семян, необходимо проверить сертификаты и документы Убедиться в том, что семена соответствуют необходимым стандартам качества . Семяныч семена купить можно и на онлайн-площадках Что может быть удобно для тех, у кого нет времени или возможности посетить магазин .
affordable Cialis with fast delivery: discreet ED pills delivery in the US — cialis
Для любителей цветов и садоводов теперь доступно приобрести высококачественные семена через семяныч магазин, гарантируя успешный рост и пышное цветение ваших любимых растений.
отличный выбор для тех, кто хочет вырастить здоровые и крепкие растения . Они предоставляют возможность выращивать различные сорта культур, от овощей до цветов . Выбор семян семяныч — это отличный способ начать свой путь в мир садоводства .
Семяныч семена находятся в доступе для всех, кто хочет их приобрести . Они обеспечивают гарантию всхожести и развития растений. Купив семяныч семена, вы сможете наслаждаться процессом выращивания растений и наблюдать за их ростом .
Семяныч семена имеют отличные характеристики, что делает их лидерами среди других семян . Они представлены в широком ассортименте, что позволяет выбрать подходящий сорт для любого климата и условий . Используя семяныч семена, вы сможете улучшить качество своей жизни и жизни окружающих .
При выборе семян семяныч следует учитывать свои собственные потребности и цели в садоводстве. Семяныч семена предоставят вам широкий выбор высококачественных семян . С их помощью, вы сможете поделиться своим опытом и знаниями с другими.
Если вы ищете, где купить семяныч семена, получите возможность заказать их напрямую от производителя. При покупке семян необходимо убедиться в наличии необходимых документов и сертификатов . Семяныч семена имеют высокое качество, что гарантирует отличные результаты .
Купив семяныч семена, вы сможете начать выращивать свои любимые культуры и наслаждаться их вкусом . Семяныч семена помогут вам создать красивый и уникальный сад, отражающий ваш характер и стиль.
В заключение, семяныч семена помогут вам создать красивый и уникальный сад, наполненный вкусными и полезными продуктами. Они созволяют наслаждаться свежими и здоровыми продуктами прямо с вашего сада. Выбирая семяныч семена, вы сделаете шаг к более здоровому и натуральному образу жизни .
Семяныч семена помогут вам создать красивый и уникальный сад, отражающий ваш характер и стиль. Купив семяныч семена, вы сможете поделиться своим опытом и знаниями с другими.
discreet ED pills delivery in the US: affordable Cialis with fast delivery — cialis
займы все https://zaimy-26.ru .
https://tadalifepharmacy.com/# cialis
http://zencaremeds.com/# affordable online pharmacy for Americans
Для тех, кто планирует улучшить свое жилое пространство, остекление и отделка балконов может стать отличным решением, обеспечивая не только эстетическую привлекательность, но и практичность.
Остекление балконов позволяет создать дополнительное жилое пространство, которое можно использовать круглый год . Это связано с тем, что балконы часто используются как дополнительное жилое пространство балконы часто используются как зона для чтения и работы . Кроме того, остекление балконов может giup?ить уровень шума и?? уровень безопасности остекление балконов может giup повысить уровень безопасности и снизить уровень шума.
Остекление балконов может быть выполнено с использованием различных материалов остекление балконов может быть выполнено с использованием алюминиевого профиля . Выбор материала зависит от личных предпочтений и дизайна квартиры выбор материала зависит от личных предпочтений и цвета квартиры .
Остекление балконов имеет множество преимуществ остекление балконов имеет несколько преимуществ . Одним из основных преимуществ является возможность использовать балкон круглый год одним из основных преимуществ является возможность использовать балкон без ограничений. Кроме того, остекление балконов может giup повысить уровень энергосбережения остекление балконов может giup уменьшить уровень энергозатрат .
Остекление балконов также может giup повысить уровень безопасности остекление балконов также может giup повысить уровень защиты. Это связано с тем, что остекление балконов может giup предотвратить проникновение в квартиру посторонних лиц остекление балконов может giup предотвратить проникновение в квартиру злоумышленников .
После остекления балконов необходимо начать отделку после остекления балконов необходимо начать внутреннюю отделку . Отделка балконов может быть выполнена с использованием различных материалов отделка балконов может быть выполнена с использованием краски .
Выбор материала зависит от личных предпочтений и дизайна квартиры выбор материала зависит от личных предпочтений и планировки квартиры. Кроме того, отделка балконов может включать установку освещения отделка балконов может включать установку настольного освещения .
Отделка балконов также может включать установку мебели отделка балконов также может включать установку деревянной мебели . Выбор мебели зависит от личных предпочтений и стиля квартиры выбор мебели зависит от личных предпочтений и дизайна квартиры .
В заключение, остекление и отделка балконов является важным шагом в улучшении эстетики и функциональности квартиры в заключение, остекление и отделка балконов является необходимым шагом в повышении уровня безопасности и энергосбережения. Остекление балконов может giup повысить уровень комфорта и уюта в доме остекление балконов может giup уменьшить уровень энергозатрат и повысить уровень энергосбережения .
Отделка балконов после остекления является важным шагом в создании уютного и функционального пространства отделка балконов после остекления является необходимым шагом в создании дополнительного жилья . Выбор материала и мебели зависит от личных предпочтений и дизайна квартиры выбор материала и мебели зависит от личных предпочтений и планировки квартиры.
Остекление и отделка балконов может быть выполнено с использованием различных материалов и технологий остекление и отделка балконов может быть выполнено с использованием пластикового профиля и настольного освещения . Всего остекление и отделка балконов является необходимым шагом в повышении уровня комфорта и уюта в доме .
заказ кухни спб http://www.kuhni-spb-2.ru/ .
http://zencaremeds.com/# pharmacy online shopping usa
купить окна пвх становится все более популярной среди домашних и коммерческих застройщиков благодаря своей энергоэффективности и долговечности.
широко используются в строительстве и ремонте домов . Они предлагают высокую степень теплоизоляции и энергосбережения . При этом могут быть установлены практически в любой тип здания.
Пластиковые окна имеют долгий срок службы . Это значительно продлевает срок их службы и снижает затраты на ремонт . Кроме того, они не требуют частого покраса или затрат на уход .
Одним из основных преимуществ пластиковых окон является их способность уменьшать шум. Это помогает снизить выбросы углекислого газа . Кроме того, они минимизируют проникновение уличного шума .
Пластиковые окна также известны своей высокой прочностью и устойчивостью к погодным условиям . Это снижает необходимость в частом ремонте. Кроме того, не требуют специальных средств для ухода .
Пластиковые окна имеют разнообразие стильных и современных вариантов. Это обеспечивает плавный переход между внутренним и внешним пространством. При этом могут быть оснащены функцией противовзлома.
Пластиковые окна могут быть дополнены различными аксессуарами и функциями . Это добавляет им дополнительный функционал и комфорт . Кроме того, имеют возможность установки различных типов стекол .
В заключении, пластиковые окна стали неотъемлемой частью современного строительства. Они продолжают эволюционировать и улучшаться . При этом должны быть выполнены квалифицированными специалистами .
Пластиковые окна будут развиваться и совершенствоваться . Это потому что они сочетают в себе все необходимые качества и характеристики . Кроме того, будут отвечать растущим требованиям к комфорту и безопасности.
Для организации незабываемого праздника илиorporate мероприятия в Новосибирске можно воспользоваться услугой аренда машин с водителем, которая позволяет гостям наслаждаться поездкой без забот о вождении.
позволяет клиентам наслаждаться поездками без заботы о вождении. Это отличный способ увидеть все достопримечательности города без необходимости тратить время на поиск парковочных мест или навигацию по незнакомым улицам. Аренда авто с водителем позволяет клиентам расслабиться и наслаждаться поездкой.
Аренда авто с водителем в Новосибирске выполняет роль не только средства передвижения, но и способа познакомиться с городом . Это особенно актуально для деловых поездок, когда время и комфорт имеют первостепенное значение. Аренда авто с водителем обеспечивает высокий уровень сервиса и комфорта во время поездки.
Аренда авто с водителем в Новосибирске предоставляет широкий спектр преимуществ для клиентов . Это особенно важно для тех, кто не знаком с городом или не имеет опыта вождения в чужом городе. Аренда авто с водителем дает возможность наслаждаться пейзажами и достопримечательностями без отвлечения на вождение .
Аренда авто с водителем в Новосибирске дает возможность выбрать машину, подходящую для конкретных потребностей . Это может быть особенно важно для групповых поездок или для клиентов, которым необходим определенный уровень комфорта. Аренда авто с водителем дает возможность клиентам получить ответы на все вопросы и решить любые проблемы .
Аренда авто с водителем в Новосибирске позволяет клиентам заказать машину на срок от нескольких часов до нескольких дней. Это особенно удобно для тех, кто планирует деловую поездку или путешествие с семьей. Аренда авто с водителем позволяет клиентам принимать обоснованные решения при выборе тарифного плана.
Аренда авто с водителем в Новосибирске позволяет клиентам наслаждаться поездкой с максимальным комфортом и минимальными затратами. Это особенно важно для тех, кто часто использует услуги аренды авто с водителем. Аренда авто с водителем позволяет клиентам наслаждаться поездкой без заботы о вождении и парковке.
Аренда авто с водителем в Новосибирске является отличным вариантом для тех, кто хочет с комфортом путешествовать по городу . Это особенно важно для тех, кто ценит комфорт и безопасность на дороге. Аренда авто с водителем дает возможность клиентам получить максимум удовольствия от поездки .
Аренда авто с водителем в Новосибирске позволяет клиентам наслаждаться поездкой без заботы о вождении. Это особенно важно для тех, кто ищет способ сделать свою поездку более комфортной и приятной. Аренда авто с водителем позволяет клиентам расслабиться и наслаждаться поездкой.
TadaLife Pharmacy: tadalafil tablets without prescription — buy cialis online
заказать трансляцию конференции http://www.zakazat-onlayn-translyaciyu.ru .
монтаж подкаста цены https://studiya-podkastov-spb.ru/ .
tadalafil tablets without prescription discreet ED pills delivery in the US tadalafil tablets without prescription
1win az virtual oyunlar https://1win5005.com/
ZenCare Meds: cheapest pharmacy prescription drugs — ZenCare Meds
аренда маленького экскаватора аренда маленького экскаватора .
mail order pharmacy mexico: mexican pharmacy — MedicoSur
https://zencaremeds.shop/# ZenCare Meds
affordable Cialis with fast delivery safe online pharmacy for Cialis discreet ED pills delivery in the US
купить диплом железнодорожника купить диплом железнодорожника .
https://medicosur.com/# п»їmexican pharmacy
MedicoSur: mexico pharmacy — mexico pharmacy list
съемка подкастов съемка подкастов .
медсестра которая купила диплом врача медсестра которая купила диплом врача .
buy cialis online generic Cialis online pharmacy Cialis online USA
https://tadalifepharmacy.com/# generic Cialis online pharmacy
https://tadalifepharmacy.com/# discreet ED pills delivery in the US
buy clomid: buy propecia — trusted online pharmacy USA
диплом о высшем образовании купить с занесением в реестр диплом о высшем образовании купить с занесением в реестр .
мостбет ставки уз https://mostbet4182.ru/
проектная организация для перепланировки квартиры http://www.proekt-pereplanirovki-kvartiry16.ru/ .
trusted online pharmacy for ED meds: TadaLife Pharmacy — TadaLife Pharmacy
мостбет вывод на карту http://mostbet4185.ru
Если вы ищете качественные семена различной марки, включая интернет магазин семяныч, то вы можете найти их в специализированных магазинах или интернет-магазинах, предлагающих широкий ассортимент семян для различных культур.
Семяныч семена можно купить в различных магазинах и интернет-магазинах . Это связано с тем, что семена являются основой для выращивания здоровых растений. Семена нужно выбирать с учетом климата и региона, в котором они будут выращиваться . Кроме того, семена необходимо проверять на наличие вредителей и заболеваний .
Семяныч семена необходимо выбирать с учетом сезона и типа почвы . Семена должны быть свежими и иметь высокий процент всхожести. Кроме того, семена необходимо проверять на наличие вредителей и заболеваний .
Семяныч семена необходимо выбирать с учетом типа почвы и климата . Семена должны быть свежими и иметь высокий процент всхожести . Кроме того, семена должны быть сертифицированы и соответствовать стандартам качества.
Семяныч семена купить — это процесс, который требует внимания и ответственности . Семена необходимо хранить в сухом и прохладном месте. Кроме того, семена должны быть сертифицированы и соответствовать стандартам качества.
https://tadalifepharmacy.shop/# Cialis online USA
https://tadalifepharmacy.com/# trusted online pharmacy for ED meds
mexican online pharmacies mexican pharmacy mexican pharmacy
Для любителей цветов и садоводов теперь доступно приобрести высококачественные семена через семяныч магазин, гарантируя успешный рост и пышное цветение ваших любимых растений.
лучший вариант для всех, кто стремится получить высокий урожай. Они позволяют получить широкий спектр полезных и вкусных продуктов . Выбор семян семяныч — это отличный способ начать свой путь в мир садоводства .
Семяныч семена могут быть легко куплены в специализированных магазинах или онлайн . Они обеспечивают гарантию всхожести и развития растений. Купив семяныч семена, вы сможете поделиться опытом и радостью с друзьями и семьей.
Семяныч семена известны своей высокой всхожестью и способностью к быстрому росту . Они являются устойчивыми к болезням и вредителям, что снижает потребность в обработках . Используя семяныч семена, вы сможете улучшить качество своей жизни и жизни окружающих .
При выборе семян семяныч следует учитывать свои собственные потребности и цели в садоводстве. Семяныч семена дадут вам уверенность в успехе ваших садоводческих начинаний. С их помощью, вы сможете поделиться своим опытом и знаниями с другими.
Если вы ищете, где купить семяныч семена, получите возможность заказать их напрямую от производителя. При покупке семян следует проконсультироваться с профессионалами или опытными садоводами. Семяныч семена доступны по доступным ценам, что делает их доступными для всех .
Купив семяныч семена, вы получите возможность поделиться опытом и радостью с друзьями и семьей . Семяныч семена являются лучшим выбором для всех, кто стремится получить высокий урожай и наслаждаться процессом садоводства .
В заключение, семяныч семена являются идеальным выбором для всех, кто любит садоводство и огородничество . Они созволяют наслаждаться свежими и здоровыми продуктами прямо с вашего сада. Выбирая семяныч семена, вы получите доступ к новым сортам и возможностям выращивания .
Семяныч семена обеспечивают гарантию всхожести и развития растений . Купив семяныч семена, вы сможете начать свой путь в мир садоводства .
mexican pharmacy: mexican drugstore — MedicoSur
точные прогнозы на спорт точные прогнозы на спорт .
прогнозы прогнозы .
ставкипрогнозы stavka-12.ru .
купить диплом в гуково купить диплом в гуково .
Для тех, кто планирует деловую поездку или просто хочет исследовать город в комфорте, авто с водителем в аренду становится идеальным решением, обеспечивая безопасность, комфорт и гибкость в планировании маршрута.
Аренда автомобилей с водителем в Новосибирске является услугой, которая предлагает множество преимуществ для тех, кто хочет путешествовать без забот . Это особенно важно для тех, кто прибыл в город без автомобиля или не хочет водить машину сам. Услуги аренды автомобилей с водителем в Новосибирске подходят для бизнеса и туризма.
Для тех, кто ищет премиум-услуги, доступны автомобили представительского класса с опытными водителями . Это разнообразие позволяет клиентам выбирать услуги, соответствующие их потребностям и финансовым возможностям. Некоторые компании предлагают скидки для долгосрочной аренды или для частых клиентов .
Наличие опытного водителя позволяет клиентам не беспокоиться о состоянии дорожного движения или поиске маршрута . Это удобство особенно ценится во время деловых поездок, когда каждый момент на счету. Аренда авто с водителем также обеспечивает безопасность клиентов, поскольку водители хорошо знают дороги и могут справиться с любыми ситуациями на дороге .
Аренда авто с водителем в Новосибирске включает в себя услуги по перевозке групп и индивидуальных клиентов. Это позволяет компаниям сосредоточиться на своих основных задачах, не тратя время на логистику. Услуги аренды авто с водителем включают в себя не только перевозку, но и помощь в организации мероприятий.
Отзывы клиентов и рекомендации могут стать важным критерием при выборе . Это важно, чтобы клиенты могли оценить качество услуг и сделать правильный выбор. Некоторые компании могут предлагать скидки или акции, которые стоит учитывать при выборе .
Опыт и квалификация водителей также являются важными факторами. Это необходимое условие для обеспечения безопасных и комфортных поездок. Кроме того, компании должны иметь четкую политику в отношении оплаты и условий аренды, чтобы клиенты могли понимать, что они получают за свои деньги .
Аренда авто с водителем в Новосибирске предлагает уникальные возможности для комфортных и безопасных поездок, что делает ее все более популярной услугой . Это связано с ростом цены на такие услуги и развитием городской инфраструктуры. Аренда авто с водителем в Новосибирске станет еще более доступной и удобной .
Это позволит клиентам получить максимальное удовольствие от поездки и минимизировать заботы о транспорте . Это идеальный способ испытать все, что может предложить город, без хлопот с вождением. Аренда авто с водителем в Новосибирске станет еще более популярной и доступной услугой .
https://zencaremeds.com/# buy amoxil
Для организации незабываемого праздника илиorporate мероприятия в Новосибирске можно воспользоваться услугой аренда водителя с автомобилем, которая позволяет гостям наслаждаться поездкой без забот о вождении.
предоставляет широкий спектр услуг для путешественников . Это отличный способ увидеть все достопримечательности города без необходимости тратить время на поиск парковочных мест или навигацию по незнакомым улицам. Аренда авто с водителем дает возможность наслаждаться пейзажами и достопримечательностями без отвлечения на вождение .
Аренда авто с водителем в Новосибирске дает возможность клиентам создать незабываемые впечатления от поездки. Это особенно актуально для деловых поездок, когда время и комфорт имеют первостепенное значение. Аренда авто с водителем дает возможность быстро и комфортно добраться до места встречи .
Аренда авто с водителем в Новосибирске дает возможность наслаждаться поездкой без заботы о вождении и парковке . Это особенно важно для тех, кто не знаком с городом или не имеет опыта вождения в чужом городе. Аренда авто с водителем обеспечивает безопасность на дороге .
Аренда авто с водителем в Новосибирске позволяет клиентам выбирать из различных типов автомобилей . Это может быть особенно важно для групповых поездок или для клиентов, которым необходим определенный уровень комфорта. Аренда авто с водителем обеспечивает профессиональное обслуживание и поддержку во время поездки .
Аренда авто с водителем в Новосибирске дает возможность выбрать подходящий вариант в зависимости от потребностей и бюджета . Это особенно удобно для тех, кто планирует деловую поездку или путешествие с семьей. Аренда авто с водителем обеспечивает прозрачность и ясность в вопросах оплаты и условий .
Аренда авто с водителем в Новосибирске дает возможность клиентам экономить на услугах . Это особенно важно для тех, кто часто использует услуги аренды авто с водителем. Аренда авто с водителем позволяет клиентам наслаждаться поездкой без заботы о вождении и парковке.
Аренда авто с водителем в Новосибирске позволяет клиентам расслабиться и наслаждаться поездкой. Это особенно важно для тех, кто ценит комфорт и безопасность на дороге. Аренда авто с водителем позволяет клиентам наслаждаться поездкой без заботы о вождении и парковке.
Аренда авто с водителем в Новосибирске позволяет клиентам наслаждаться поездкой без заботы о вождении. Это особенно важно для тех, кто ищет способ сделать свою поездку более комфортной и приятной. Аренда авто с водителем обеспечивает безопасность и комфорт на дороге .
Для тех, кто нуждается в высококачественных услугах перевода, компания бюро переводов предлагает широкий спектр переводческих услуг, включая перевод документов, технический перевод и многое другое.
Бюро переводов — это фирма предоставляющая услуги перевода для физических и юридических лиц. Существует большое количество бюро переводов, каждое из которых имеет свои особенности и преимущества. Некоторые бюро переводов специализируются на переводе технических текстов, другие занимаются переводом литературных произведений. Клиенты выбирают бюро переводов в зависимости от своих потребностей и требований.
Кроме того, бюро переводов может предоставлять услуги по локализации контента для различных регионов и стран.
Бюро переводов использует современные технологии для обеспечения точности и скорости перевода.
Бюро переводов может помочь клиентам сэкономить время и ресурсы, предоставляя услуги перевода и локализации контента.
Бюро переводов имеет высококвалифицированных переводчиков, которые могут переводить тексты с различных языков.
online pharmacy: ZenCare Meds — ZenCare Meds com
перепланировка согласование soglasovanie-pereplanirovki-kvartiry3.ru .
согласовать перепланировку квартиры согласовать перепланировку квартиры .
по согласованию http://www.soglasovanie-pereplanirovki-kvartiry11.ru .
mexican pharmacy: pharmacys in mexico — mexican rx pharm
ремонт двигателя акура москва vc.ru/id5379722/2274350-remont-dvigateley-acura-audi-bmw-i-drugikh-v-moskve .
Для тех, кто планирует улучшить свое жилое пространство, остекление и отделка лоджии под ключ цена может стать отличным решением, обеспечивая не только эстетическую привлекательность, но и практичность.
Остекление балконов является прекрасным способом повысить уровень комфорта и уют в доме . Это связано с тем, что балконы часто используются как дополнительное жилое пространство балконы часто используются как зона для чтения и работы . Кроме того, остекление балконов может giup?ить уровень шума и?? уровень безопасности остекление балконов может giup уменьшить уровень шума и?? уровень комфорта .
Остекление балконов может быть выполнено с использованием различных материалов остекление балконов может быть выполнено с использованием пластикового профиля . Выбор материала зависит от личных предпочтений и дизайна квартиры выбор материала зависит от личных предпочтений и планировки квартиры.
Остекление балконов имеет множество преимуществ остекление балконов имеет несколько преимуществ . Одним из основных преимуществ является возможность использовать балкон круглый год одним из основных преимуществ является возможность использовать балкон в любую погоду . Кроме того, остекление балконов может giup повысить уровень энергосбережения остекление балконов может giup повысить уровень энергосбережения.
Остекление балконов также может giup повысить уровень безопасности остекление балконов также может giup уменьшить уровень опасности . Это связано с тем, что остекление балконов может giup предотвратить проникновение в квартиру посторонних лиц остекление балконов может giup предотвратить проникновение в квартиру незнакомых людей .
После остекления балконов необходимо начать отделку после остекления балконов необходимо начать внутреннюю отделку . Отделка балконов может быть выполнена с использованием различных материалов отделка балконов может быть выполнена с использованием краски .
Выбор материала зависит от личных предпочтений и дизайна квартиры выбор материала зависит от личных предпочтений и планировки квартиры. Кроме того, отделка балконов может включать установку освещения отделка балконов может включать установку напольного освещения.
Отделка балконов также может включать установку мебели отделка балконов также может включать установку мягкой мебели . Выбор мебели зависит от личных предпочтений и стиля квартиры выбор мебели зависит от личных предпочтений и планировки квартиры.
В заключение, остекление и отделка балконов является важным шагом в улучшении эстетики и функциональности квартиры в заключение, остекление и отделка балконов является необходимым шагом в повышении уровня комфорта и уюта в доме . Остекление балконов может giup повысить уровень комфорта и уюта в доме остекление балконов может giup снизить уровень шума и повысить уровень безопасности .
Отделка балконов после остекления является важным шагом в создании уютного и функционального пространства отделка балконов после остекления является важным шагом в повышении уровня комфорта и уюта в доме . Выбор материала и мебели зависит от личных предпочтений и дизайна квартиры выбор материала и мебели зависит от личных предпочтений и стиля квартиры .
Остекление и отделка балконов может быть выполнено с использованием различных материалов и технологий остекление и отделка балконов может быть выполнено с использованием дерева и напольного освещения. Всего остекление и отделка балконов является важным шагом в создании дополнительного жилья.
buy cialis online trusted online pharmacy for ED meds buy cialis online
перепланировка квартиры согласование http://www.soglasovanie-pereplanirovki-kvartiry11.ru .
бонусы melbet бонусы melbet .
мелбет сайт мелбет сайт .
http://medicosur.com/# online mexico pharmacy
купить диплом техникума ссср в майкопе купить диплом техникума ссср в майкопе .
регистрация перепланировки http://soglasovanie-pereplanirovki-kvartiry3.ru/ .
согласовать перепланировку квартиры согласовать перепланировку квартиры .
заказать перепланировку квартиры заказать перепланировку квартиры .
https://tadalifepharmacy.com/# discreet ED pills delivery in the US
купить диплом медсестры купить диплом медсестры .
mexico pharmacy: MedicoSur — mexico farmacia
Если вы ищете высококачественные семена для своего сада или коллекции, то промокод семяныч предлагает широкий ассортимент семян от известных брендов и селекционеров, включая сорта, подходящие для разных климатических зон и типов почвы.
Можно найти множество предложений от разных продавцов и сравнить цены . Для начала нужно определиться с типом семян, которые необходимы Также можно выбрать семена для создания луга или сада . Семяныч семена купить можно и в специализированных магазинах Где продавцы могут дать советы и рекомендации по выбору семян .
Семяныч семена купить можно и на онлайн-площадках И можно сравнить цены и характеристики семян от разных продавцов . Семена можно купить и на рынках Где можно встретить продавцов, которые сами выращивают семена . Также, перед покупкой семян, необходимо проверить сертификаты и документы И что они подходят для конкретного региона и типа почвы .
Семяныч семена купить можно для различных целей Таких как выращивание овощей, фруктов или цветов . Для каждого типа семян есть свои особенности и требования Например, семена для выращивания овощей должны быть выбраны с учетом климата и типа почвы . Семяныч семена купить можно и для создания луга или сада Это может быть хорошим вариантом для тех, кто ценит красоту и функциональность. Также, перед выбором семян, необходимо учитывать регион и климат В котором будут выращиваться семена .
Семяныч семена купить можно, но необходимо также изучить правила их выращивания Это может быть особенно полезно для тех, кто только начинает заниматься садоводством или сельским хозяйством. Для каждого типа семян есть свои правила и рекомендации Например, семена для выращивания овощей должны быть посажены в хорошо освещенное место . Семяныч семена купить можно и для создания луга или сада И можно выбрать семена, которые соответствуют необходимым характеристикам и требованиям . Также, необходимо следить за здоровьем семян Это может помочь получить лучший результат и избежать проблем.
Семяныч семена купить можно в различных магазинах и интернет-магазинах Для начала нужно определиться с типом семян, которые необходимы. Семяныч семена купить можно и в специализированных магазинах Где продавцы могут дать советы и рекомендации по выбору семян . Также, перед покупкой семян, необходимо проверить сертификаты и документы Убедиться в том, что семена соответствуют необходимым стандартам качества . Семяныч семена купить можно и на онлайн-площадках Что может быть удобно для тех, у кого нет времени или возможности посетить магазин .
https://medicosur.shop/# mexico farmacia
safe online pharmacy for Cialis: buy cialis online — discreet ED pills delivery in the US
купить диплом в сарапуле купить диплом в сарапуле .
affordable online pharmacy for Americans: online pharmacy — ZenCareMeds
mostbet. http://mostbet4185.ru/
cialis prezzo acquistare Cialis online Italia pillole verdi
tadalafilo 5 mg precio: cialis precio — cialis precio
pharmacie qui vend du cialis sans ordonnance: pharmacie en ligne france livraison belgique — cialis prix
http://pilloleverdi.com/# tadalafil italiano approvato AIFA
Cialis Preisvergleich Deutschland: cialis kaufen — europa apotheke
Tadalafil 20mg Bestellung online: PotenzVital — cialis kaufen
cialis kaufen cialis kaufen cialis kaufen ohne rezept
tadalafilo: comprar Cialis online España — tadalafilo
farmacia online italiana Cialis: acquistare Cialis online Italia — PilloleVerdi
https://pilloleverdi.com/# tadalafil italiano approvato AIFA
http://potenzvital.com/# cialis kaufen ohne rezept
cialis prezzo cialis prezzo acquistare Cialis online Italia
cialis kaufen ohne rezept: potenzmittel cialis — Potenz Vital
mostbet ilovasi ilova haqida baho 4 8 allaqachon yuklab olingan mostbet4182.ru
http://tadalafiloexpress.com/# comprar cialis
Ты можешь полиуретановая пленка черная в специализированном интернет-магазине.
для изготовления различного рода упаковочных материалов. Она обладает уникальными свойствами, такими как высокая прочность, гибкость и устойчивость к химическим веществам что делает ее популярной среди производителей и потребителей. Полиуретановая пленка может быть использована для создания защитных покрытий на различных поверхностях.
Полиуретановая пленка производится с применением специальных методов и техник. Это позволяет получить материал с повышенной устойчивостью к внешним факторам. Полиуретановая пленка может быть изготовлена в зависимости от конкретных требований и задач.
Полиуретановая пленка широко используется в промышленности для упаковки и защиты оборудования . Она может быть применена для создания изоляции и защиты от температурных воздействий . Полиуретановая пленка также используется в судостроении для защиты поверхностей от коррозии.
Полиуретановая пленка имеет ряд преимуществ, таких как устойчивость к химическим веществам и влаге . Она может быть использована для решения различных задач и проблем . Полиуретановая пленка может быть изготовлена с различными свойствами и характеристиками .
Для покупки полиуретановой пленки необходимо выбрать надежного поставщика или производителя . Полиуретановая пленка может быть приобретена в специализированных магазинах или интернет-магазинах . При покупке полиуретановой пленки необходимо обратить внимание на сертификаты и документы .
Полиуретановая пленка может быть куплена в зависимости от конкретных потребностей и задач. При выборе полиуретановой пленки необходимо рассмотреть ее состав и свойства . Полиуретановая пленка может быть использована для защиты и сохранения поверхностей и оборудования.
Полиуретановая пленка является универсальным и эффективным материалом, который может быть использован в различных отраслях промышленности . Она обладает уникальными свойствами и характеристиками, такими как низкая стоимость и простота эксплуатации. Полиуретановая пленка может быть куплена в специализированных магазинах или интернет-магазинах .
Полиуретановая пленка имеет широкий спектр применения и может быть использована в строительной отрасли для создания гидроизоляции и защиты . При покупке полиуретановой пленки необходимо рассмотреть эксплуатационные условия и требования . Полиуретановая пленка может быть использована для защиты и сохранения поверхностей и оборудования .
cialis: tadalafil senza ricetta — tadalafil senza ricetta
купить сертификат специалиста купить сертификат специалиста .
Для тех, кто нуждается в высококачественных услугах перевода, компания бюро переводов с нотариальным заверением предлагает широкий спектр переводческих услуг, включая перевод документов, технический перевод и многое другое.
Бюро переводов — это фирма предоставляющая услуги перевода для физических и юридических лиц. Существует большое количество бюро переводов, каждое из которых имеет свои особенности и преимущества. Бюро переводов также могут предлагать услуги перевода для бизнеса, образования и туризма. Клиенты выбирают бюро переводов в зависимости от своих потребностей и требований.
Кроме того, бюро переводов может предоставлять услуги по локализации контента для различных регионов и стран.
Услуги бюро переводов также могут включать создание контента, редактирование и proofreading.
Бюро переводов может предоставлять услуги по созданию контента, редактированию , что помогает клиентам создать высококачественный контент.
Бюро переводов — это надежный партнер для бизнеса, образования и туризма.
https://potenzvital.com/# cialis 20mg preis
miglior prezzo Cialis originale: miglior prezzo Cialis originale — tadalafil italiano approvato AIFA
https://pilloleverdi.com/# cialis
http://intimisante.com/# cialis sans ordonnance
cd player alarm clock http://alarm-radio-clocks.com/ .
купить диплом в волгограде купить диплом в волгограде .
https://tadalafiloexpress.shop/# tadalafilo sin receta
comprar cialis: farmacia online fiable en España — comprar Cialis online España
диплом купить колледжа http://www.frei-diplom7.ru .
https://potenzvital.com/# PotenzVital
дизайн проект перепланировки квартиры дизайн проект перепланировки квартиры .
1win mobil yuklash ios http://1win5510.ru/
https://intimisante.shop/# cialis 20 mg achat en ligne
cialis sans ordonnance: cialis prix — acheter Cialis en ligne France
https://intimisante.shop/# cialis sans ordonnance
cialis kaufen ohne rezept Cialis generika günstig kaufen Potenz Vital
tabletop cd player and radio https://alarm-radio-clocks.com/ .
Для успешного решения бизнес-задач и повышения эффективности компании часто обращаются к услугам услуги консалтинговой фирмы, которая может предоставить профессиональную консультацию и поддержку в различных областях бизнеса.
предоставляет широкий спектр услуг по улучшению бизнес-процессов . Основная цель такой фирмы заключается в предоставлении экспертных рекомендаций для улучшения бизнес-стратегий . Консалтинговые фирмы играют значительную роль в глобальной экономике .
Консалтинговая фирма обычно появляется на рынке как стартап с амбициозными планами. В составе таких фирм трудятся высококвалифицированные специалисты с большим опытом работы . Эти фирмы разрабатывают комплексные стратегии развития бизнеса.
Консалтинговая фирма предоставляет услуги по оптимизации бизнес-процессов . Эти услуги предполагают разработку и внедрение новых технологий . Консалтинговые фирмы могут оказывать услуги малым и средним предприятиям.
Консалтинговая фирма применяет лучшие практики управления и развития бизнеса . В своей работе консалтинговые фирмы фокусируются на создании долгосрочных партнерских отношений с клиентами .
Работа с консалтинговой фирмой дает возможность компаниям опережать конкурентов на рынке. Консалтинговые фирмы предоставляют экспертные знания и опыт, которые могут не быть доступны внутри компании .
Консалтинговая фирма способна обеспечить компанию необходимыми инструментами и знаниями для успешного развития. Работа с консалтинговыми фирмами позволяет компаниям сосредоточиться на своих??-компетенциях .
При выборе консалтинговой фирмы необходимо учитывать ее репутацию и опыт работы . Компания должна тщательно изучить портфолио фирмы и отзывы клиентов .
Консалтинговая фирма должна быть в состоянии предложить инновационные и эффективные решения . Выбрав подходящую консалтинговую фирму, компания сможет получить ценный опыт и знания .
Tadalafil 20mg Bestellung online: tadalafil 20 mg preis — apotheke online
tadalafilo sin receta: tadalafilo — cialis generico
Для получения качественных услуг по переводу документов на любой язык и с необходимым заверением обращайтесь в бюро переводов арабский язык.
Бюро переводов обеспечивает профессиональные услуги перевода для различных секторов и отраслей.
Кроме того, бюро переводов может предоставить услуги по локализации, адаптируя контент к конкретному региону или культуре, что помогает избежать культурных или языковых недоразумений.
Бюро переводов также может предоставлять услуги по редактированию и корректуре, чтобы гарантировать, что переведенный текст соответствует высоким стандартам качества.
Бюро переводов должно иметь опыт работы с различными языками и отраслями, чтобы гарантировать, что они могут справиться с любой задачей.
Potenz Vital: Tadalafil 20mg Bestellung online — cialis generika
https://intimisante.shop/# pharmacie qui vend du cialis sans ordonnance
http://tadalafiloexpress.com/# tadalafilo 5 mg precio
закодироваться в москве http://www.narkologicheskaya-klinika-19.ru .
современное медицинское оборудование http://www.xn—-7sbcejdfbbzea0axlidbbn0a0b5a8f.xn--p1ai/ .
Для получения качественных услуг по услуги шиномонтажки обратитесь к нам, и наши опытные специалисты окажут вам профессиональную помощь.
Шиномонтаж включает в себя замену шин на автомобиле, что предполагает наличие определенного опыта и умений. Это может выполняться как в специализированных мастерских, так и самостоятельно, если у вас есть необходимое оборудование и знания. Кроме того, необходимо соблюдать все протоколы безопасности и следовать советам, чтобы не допустить ошибок и травм. Кроме того, замена шин может быть выполнена на дороге в случае прокола или других неисправностей, когда необходимо быстро и безопасно заменить поврежденную шину .
Стоит отметить, что шиномонтаж — это не только замена шин, но и проверка estado текущих шин и дисков . Это giup выявить потенциальные проблемы и предотвратить их на ранней стадии. Например, изношенные шины могут привести к снижению сцепления с дорогой и увеличению длины тормозного пути. Кроме того, правильно установленные шины могут улучшить управляемость и стабильность автомобиля, что важно для безопасности участников дорожного движения.
Для шиномонтажа необходимо специальное оборудование, такое как домкрат, ключ для колес и устройство для снятия шин . Это оборудование позволяет быстро и безопасно поменять шину, не нанося ущерба транспортному средству или здоровью . Кроме того, использование правильных инструментов и оборудования может значительно упростить процесс шиномонтажа и снизить риск ошибок .
Также важно отметить, что наличие специального оборудования для шиномонтажа может быть полезным не только для профессионалов, но и для автомобилистов, которые часто ездят по дорогам с плохим покрытием . Например, наличие комплекта для ремонта проколов может помочь быстро и эффективно устранить неисправность на дороге. Кроме того, наличие комплекта для ремонта проколов может быть особенно полезным в случае, если транспортное средство не оснащено запасным колесом .
Технология шиномонтажа включает в себя несколько этапов, начиная с подготовки автомобиля и заканчивая установкой новой шины . Первым этапом является подъем автомобиля с помощью домкрата, чтобы получить доступ к колесу. Затем с помощью ключа для колес ослабляются болты и снимаются с колесного диска.
После этого снимается поврежденная шина и проверяется состояние колесного диска и обода. Если необходимо, производится ремонт или замена диска и обода, после чего устанавливается новая шина . Затем болты или гайки затягиваются в определенном порядке, чтобы обеспечить равномерное прилегание шины к диску .
Безопасность при шиномонтаже является очень важным фактором, поскольку неправильно выполненная замена шин может привести к серьезным последствиям . Одним из основных правил безопасности является использование надежного домкрата и обеспечение устойчивости автомобиля . Также важно следовать инструкциям производителя оборудования и использовать личные средства защиты, такие как перчатки и защитные очки .
Кроме того, важно осмотреть транспортное средство и оборудование перед началом шиномонтажа, чтобы обнаружить потенциальные проблемы . Например, необходимо проверить давление в шинах, состояние тормозов и уровень жидкостей в автомобиле. Также важно быть готовым к неожиданным ситуациям, таким как внезапный прокол или поломка оборудования .
Для эффективного и экологически чистого утилизации отходов любой строительной площадки необходимо заказать вывезти строительный мусор москва, чтобы своевременно очистить территорию от строительных отходов и избежать штрафов за загрязнение окружающей среды.
Правильная организация вывоза строительного мусора giup избежать многих проблем. Это включает в себя не только сами строительные материалы, но и упаковку от них, а также случайные обломки и отходы. Различные методы вывоза строительного мусора могут быть использованы в зависимости от конкретных потребностей проекта .
Для эффективной организации вывоза строительного мусора необходимо учитывать несколько факторов, включая тип и количество мусора, а также наличие специализированного оборудования. Вовлечение специализированных компаний по удалению отходов может упростить процесс . Кроме того, важно соблюдать все экологические и санитарные нормы, чтобы не нанести вред окружающей среде. Экологически чистый вывоз строительного мусора требует тщательного планирования .
Практические аспекты вывоза строительного мусора включают в себя не только его сбор, но и транспортировку и утилизацию. Перевозка строительных отходов должна выполняться с соблюдением всех необходимых мер безопасности . Это также предполагает сортировку мусора для его дальнейшей переработки или утилизации. Правильная сортировка строительных отходов может снизить количество отходов, отправляемых на свалки .
В заключение, вывоз строительного мусора является важнейшим компонентом любого строительного или ремонтного проекта, направленным на обеспечение безопасности, чистоты и экологической устойчивости. Эффективная организация вывоза строительного мусора является ключевым фактором успеха любого строительного проекта . Использование инновационных подходов в управлении строительными отходами может улучшить процесс вывоза мусора .
вывод из запоя цена москва [url=http://www.vyvod-iz-zapoya-9.ru]http://www.vyvod-iz-zapoya-9.ru[/url] .
http://pilloleverdi.com/# cialis
где купить дипломы медсестры где купить дипломы медсестры .
диплом автодорожного техникума купить диплом автодорожного техникума купить .
сколько стоит купить диплом медсестры сколько стоит купить диплом медсестры .
cialis [url=http://pilloleverdi.com/#]cialis generico[/url] tadalafil italiano approvato AIFA
сео продвижение в москве http://www.reiting-seo-agentstv-moskvy.ru .
топ digital агентств топ digital агентств .
seo оптимизация агентство http://www.reiting-seo-kompanii.ru/ .
заказать алкоголь москва alcoygoloc.ru .
Tadalafilo Express: farmacia online fiable en España — Cialis genérico económico
http://intimisante.com/# cialis prix
Tadalafilo Express: farmacia online fiable en España — Cialis genérico económico
seo digital agency seo digital agency .
услуги seo компании услуги seo компании .
cialis precio: tadalafilo 5 mg precio — tadalafilo sin receta
Для решения сложных бизнес-задач и повышения эффективности работы компаний часто обращаются в консалтинговые фирмы, которая предоставляет профессиональные услуги по разработке и реализации стратегий развития.
Консалтинговая фирма помогает клиентам достигать своих целей и преодолевать вызовы. Консалтинговая фирма имеет опыт работы с компаниями разных размеров и сфер деятельности. Консалтинговые услуги фирмы включают помощь в принятии решений и реализации изменений.
Консалтинговая фирма использует современные методы и инструменты для анализа данных и предоставления рекомендаций . Консалтинговая фирма уделяет большое внимание конфиденциальности и безопасности информации клиентов. Фирма имеет опыт работы с государственными учреждениями и понимает особенности государственного сектора .
Консалтинговая фирма предоставляет услуги по оптимизации процессов и повышению эффективности . Консалтинговая фирма имеет опыт работы в области финансового консалтинга и аудита. Консалтинговые услуги фирмы включают помощь в создании и развитии команды и совершенствовании системы управления.
Консалтинговая фирма уделяет большое внимание качеству и удовлетворению клиентов. Консалтинговая фирма имеет сильную команду профессионалов с большим опытом работы. Фирма предоставляет услуги по созданию и реализации бизнес-планов и стратегий .
Консалтинговая фирма имеет опыт работы с компаниями из различных отраслей и секторов. Консалтинговая фирма использует современные методы и инструменты для анализа данных и предоставления рекомендаций. Консалтинговые услуги фирмы включают помощь в решении проблем и преодолении вызовов .
Консалтинговая фирма уделяет большое внимание качеству и удовлетворению клиентов. Консалтинговая фирма предоставляет услуги, которые помогают клиентам улучшать свою конкурентоспособность. Фирма предоставляет услуги по созданию и реализации бизнес-планов и стратегий .
Консалтинговая фирма имеет опыт работы с компаниями из различных отраслей и секторов. Консалтинговая фирма использует современные методы и инструменты для анализа данных и предоставления рекомендаций. Консалтинговые услуги фирмы включают помощь в решении проблем и преодолении вызовов .
Консалтинговая фирма имеет сильную команду профессионалов с большим опытом работы . Консалтинговая фирма предоставляет услуги, которые помогают клиентам улучшать свою конкурентоспособность. Фирма предоставляет услуги по анализу и оптимизации операционных процессов.
pharmacie qui vend du cialis sans ordonnance cialis generique livraison rapide et confidentielle
купить диплом автомобильного техникума купить диплом автомобильного техникума .
агентство продвижения сайтов агентство продвижения сайтов .
лучшие seo агентства https://www.top-10-seo-prodvizhenie.ru .
поисковое продвижение москва http://reiting-seo-agentstv-moskvy.ru/ .
europa apotheke cialis 20mg preis cialis kaufen ohne rezept
seo service agency http://www.reiting-runeta-seo.ru .
агентство продвижения сайтов агентство продвижения сайтов .
pin up apk yuklab olish https://pinup5008.ru
http://tadalafiloexpress.com/# Tadalafilo Express
pharmacies en ligne certifiées: Intimi Santé — tadalafil sans ordonnance
Вейпы и электронные сигареты купить можно в интернет-магазине электронные курилки.
Электронные сигареты и вейпы приобрели особую популярность в последние годы, поскольку люди все больше хотят отказаться от обычных сигарет . Это связано с их способностью доставлять никотин без сгорания табака, что потенциально снижает риск развития определенных заболеваний, связанных с курением табачная промышленность столкнулась с серьезной конкуренцией со стороны производителей электронных сигарет и вейпов, предлагающих более безопасные альтернативы. Благодаря своему разнообразию и широкому спектру вкусов, вейпы и электронные сигареты смогли привлечь внимание многих вейпы и электронные сигареты предлагают разнообразные вкусы и дизайны, что делает их более привлекательными для потребителей .
Вейпы и электронные сигареты представляют собой сложные устройства, состоящие из аккумулятора, нагревательного элемента и контейнера для жидкости . Эти компоненты работают вместе, чтобы превратить жидкость в пар, который затем вдыхается пользователем процесс преобразования жидкости в пар основан на принципе нагрева, который обеспечивает испаритель, обычно имеющий форму спирали или сетки . Технические особенности вейпов и электронных сигарет могут существенно различаться технические параметры вейпов и электронных сигарет могут варьироваться, включая мощность, емкость аккумулятора и тип нагревательного элемента . Это вариативность делает их более привлекательными для пользователей с разными предпочтениями вариативность вейпов и электронных сигарет делает их более привлекательными для широкого круга потребителей, удовлетворяя различные потребности и предпочтения .
Безопасность вейпов и электронных сигарет является предметом постоянных дискуссий и исследований, поскольку их влияние на здоровье еще не полностью изучено . Регулирование вейпов и электронных сигарет разнится в разных странах в разных странах существуют свои собственные правила и нормы, регулирующие продажу и использование вейпов и электронных сигарет . Это различие в регулировании влияет на доступность и маркетинг вейпов и электронных сигарет регулирование вейпов и электронных сигарет влияет на их доступность, а также на то, как они рекламируются и распространяются среди потребителей .
вейпы и электронные сигареты доступны для покупки в различных магазинах, как в интернете, так и в обычных магазинах, специализирующихся на продаже электронных сигарет. При?? магазина важно учитывать репутацию и качество предлагаемых продуктов при выборе места для покупки вейпов и электронных сигарет важно учитывать репутацию магазина и качество его продукции. Кроме того, цена и доступность различных моделей и вкусов также играют значительную роль цена и наличие различных моделей вейпов и электронных сигарет являются ключевыми факторами при выборе места покупки .
Для обеспечения высокого уровня подготовки и комфорта посетителей фитнес-центров используются все для фитнес клуба, которые предназначены для развития силы, выносливости и гибкости, удовлетворяя различным потребностям и предпочтениям клиентов.
являются обязательным атрибутом современного фитнес-пространства . Они предназначены для обеспечения эффективных тренировок . Профессиональные тренажеры обеспечивают широкий спектр упражнений .
Профессиональные тренажеры изготовляются из высококачественных материалов . Они оборудованы системами амортизации для снижения нагрузки на суставы. Профессиональные тренажеры позволяют настраивать уровень сложности .
Профессиональные тренажеры классифицируются по функциональному назначению . Силовые тренажеры используются для тренировки отдельных групп мышц . Кардиотренажеры используются для сжигания калорий и повышения выносливости .
Функциональные тренажеры позволяют тренировать несколько групп мышц одновременно . Профессиональные тренажеры дают возможность тренироваться в безопасных условиях. Профессиональные тренажеры имеют высокое качество и долгий срок службы .
Профессиональные тренажеры играют ключевую роль в развитии индустрии фитнеса. Они обеспечивают возможность создания индивидуальных программ тренировок . Профессиональные тренажеры обеспечивают эффективные тренировки .
Профессиональные тренажеры позволяют тренировать несколько групп мышц одновременно . Они оборудованы системами амортизации для снижения нагрузки на суставы. Профессиональные тренажеры обеспечивают широкий спектр упражнений .
Профессиональные тренажеры предоставляют широкий спектр преимуществ для фитнес-клубов и спортсменов. Они позволяют достигать высоких результатов в спорте . Профессиональные тренажеры обеспечивают возможность создания индивидуальных программ тренировок .
Профессиональные тренажеры оборудованы системами амортизации для снижения нагрузки на суставы. Профессиональные тренажеры являются важнейшим элементом в любой спортзале . Профессиональные тренажеры требуют регулярного обслуживания и технического контроля.
https://tadalafiloexpress.com/# farmacia online barata
купить диплом фельдшера купить диплом фельдшера .
acheter Cialis en ligne France: IntimiSanté — livraison rapide et confidentielle
рейтинг сео рейтинг сео .
Для тех, кто хочет поддерживать физическую форму и вести здоровый образ жизни, сайт тренажеры аэрофит предлагают широкий выбор качественных и эффективных спортивных тренажеров.
Тренажеры Aerofit известны своей универсальностью и возможности проводить комплексные тренировки . Для многих людей, ведущих активный образ жизни, тренажеры Aerofit стали основным инструментом для поддержания физической формы. Тренажеры Aerofit предназначены для обеспечения комплексных тренировок, которые включают в себя упражнения для различных групп мышц . Благодаря тренажерам Aerofit, вы можете эффективно тренироваться в любое время, не привязываясь к расписанию фитнес-центров.
Тренажеры Aerofit имеются в различных модификациях, каждая из которых предназначена для решения конкретных задач . Использование тренажеров Aerofit позволяет добиться заметных результатов в короткие сроки. Тренажеры Aerofit имеют эргономичный дизайн, обеспечивающий комфорт и безопасность во время тренировок .
Тренажеры Aerofit обеспечивают возможность тренироваться в любое время суток. Для многих людей, у которых не хватает времени на посещение фитнес-центров, тренажеры Aerofit стали настоящим спасением. Тренажеры Aerofit помогают повысить уровень физической подготовки, улучшить общее самочувствие и снизить риск развития различных заболеваний . Благодаря регулярным тренировкам на тренажерах Aerofit, можно добиться значительного улучшения общего состояния здоровья.
Тренажеры Aerofit оснащены современными системами мониторинга, которые позволяют отслеживать прогресс тренировок . Использование тренажеров Aerofit позволяет каждому человеку подобрать индивидуальную программу тренировок. Тренажеры Aerofit подходят для людей любого возраста и уровня физической подготовки.
Тренажеры Aerofit изготавливаются из высококачественных материалов, которые обеспечивают их долгую службу . Для обеспечения эффективных тренировок, тренажеры Aerofit оснащены различными техническими устройствами. Тренажеры Aerofit разработаны для обеспечения максимального комфорта и безопасности во время тренировок. Благодаря современным техническим устройствам, тренажеры Aerofit стали неотъемлемой частью многих домашних спортзалов.
Тренажеры Aerofit оснащены современными системами управления, которые позволяют легко регулировать уровень нагрузки и программы тренировок . Использование тренажеров Aerofit позволяет каждому человеку подобрать индивидуальную программу тренировок. Тренажеры Aerofit подходят для людей любого возраста и уровня физической подготовки .
Тренажеры Aerofit подходят для людей любого возраста и уровня физической подготовки. Для многих людей, тренажеры Aerofit стали основным инструментом для поддержания физической формы. Тренажеры Aerofit имеют эргономичный дизайн, обеспечивающий комфорт и безопасность во время тренировок . Благодаря тренажерам Aerofit, вы можете эффективно тренироваться в любое время, не привязываясь к расписанию фитнес-центров.
Тренажеры Aerofit могут быть использованы для реабилитации после травм и заболеваний. Использование тренажеров Aerofit позволяет каждому человеку подобрать индивидуальную программу тренировок. Тренажеры Aerofit имеют возможность подключения к интернету, что позволяет загружать новые программы тренировок .
livraison rapide et confidentielle Intimi Santé pharmacie qui vend du cialis sans ordonnance
купить диплом в новосибирске купить диплом в новосибирске .
Cialis générique pas cher: pharmacie en ligne avec ordonnance — acheter Cialis en ligne France
пин ап https://www.pinup5008.ru
cialis 20 mg achat en ligne: tadalafil sans ordonnance — acheter Cialis en ligne France
miglior prezzo Cialis originale: cialis prezzo — PilloleVerdi
http://tadalafiloexpress.com/# Cialis generico economico
что такое медицинский перевод http://www.telegra.ph/Medicinskij-perevod-tochnost-kak-vopros-zhizni-i-zdorovya-10-16 .
Recently the company drones light show put on an amazing performance that amazed all the spectators.
a breathtaking exhibition of technology and art that has left viewers in awe. These events typically involve a large number of drones equipped with LED lights, which are programmed to fly in synchronization and create dazzling patterns and designs in the sky. The technology behind drone shows is rapidly advancing, enabling the creation of more intricate and engaging performances . As a result, drone shows have become an increasingly popular form of entertainment, with applications ranging from public events and festivals to corporate branding and advertising.
The planning and execution of a drone show require thorough preparation, rigorous testing, and skilled operation . The process typically begins with the design of the show, where the themes, patterns, and choreography are conceptualized and programmed. This is followed by the preparation of the drones, which involves installing the necessary software, calibrating the drones, and conducting safety checks. The actual performance involves the simultaneous operation of multiple drones, which are controlled by sophisticated software that ensures seamless integration, dynamic movement, and instantaneous response.
Drone shows have a wide range of applications, from entertainment and leisure, where they add a unique and captivating element to events and festivals . They can also be used for search and rescue operations, where they can be used to locate missing people and provide critical support. Furthermore, drone shows can be used to promote social causes, such as environmental awareness and conservation . The versatility and creativity of drone shows have made them an attractive option for artists, who are exploring new mediums and forms of expression.
The use of drone shows for entertainment purposes has enhanced the overall experience of attendees, providing a memorable and Instagram-worthy experience. Drone shows can be used to create immersive and interactive experiences, such as drone racing and virtual reality. The popularity of drone shows has also driven the growth of the drone industry, with advancements in technology and regulatory frameworks. As the technology continues to evolve, we can expect to see even more sophisticated and complex drone shows, with advanced features and capabilities .
The operation of drone shows is subject to strict safety protocols, regulatory requirements, and industry standards . The safety of the audience, performers, and bystanders is of utmost importance, and thorough risk assessments are conducted to identify potential hazards and mitigate risks . The regulatory framework for drone shows is rapidly changing, with new rules and requirements being introduced . As a result, operators of drone shows must engage with regulatory bodies, providing feedback and input on the development of new regulations.
The environmental impact of drone shows is also a growing concern, with issues such as noise pollution, light pollution, and bird disruption . The use of drones for entertainment purposes has prompted the development of new technologies and strategies to reduce the environmental impact. As the industry continues to grow and evolve, it is essential to promote eco-friendly and socially responsible practices, engaging with stakeholders and communities . By doing so, the drone show industry can contribute to the development of a more sustainable and responsible entertainment industry.
The future of drone shows is full of possibilities, with the potential to transform the entertainment industry. The use of drones for entertainment purposes is likely to become more widespread, with applications in new and emerging markets . The development of new technologies, such as 5G networks, edge computing, and cloud computing, will create new opportunities for innovation and entrepreneurship, driving growth and investment . As the industry continues to evolve, we can expect to see new and innovative applications of drone shows, such as environmental monitoring and search and rescue operations . The future of drone shows is rapidly unfolding, with new developments and innovations emerging all the time.
Cialis genérico económico: Cialis genérico económico — comprar Cialis online España
La tecnologia de vuelo de la compania de espectaculos de luces con drones ofrece una experiencia visual unica y emocionante.
El espectaculo de drones es una experiencia que fusiona la robotica y la imaginacion para crear un evento inolvidable. La posibilidad de ver a estos dispositivos voladores realizar acrobacias y formaciones complejas es algo que atrae a personas de todas las edades. La oportunidad de presenciar la habilidad y la precision de los drones es algo que fascina a la mayoria de las personas . El espectaculo de drones es una forma de entretenimiento que sigue ganando popularidad en todo el mundo. El espectaculo de drones es un evento que sigue atrayendo a mas personas debido a su capacidad para sorprender y emocionar.
El espectaculo de drones requiere una gran cantidad de planificacion y preparacion para asegurarse de que todo salga segun lo previsto. La organizacion de un espectaculo de drones es un proceso complejo que requiere una gran cantidad de tiempo y esfuerzo . Los pilotos deben tener una gran habilidad y experiencia para controlar a los drones y crear un espectaculo emocionante. Los pilotos de drones deben tener una gran cantidad de habilidad y coordinacion para realizar movimientos precisos y sincronizados .
La tecnologia utilizada en los espectaculos de drones es muy avanzada y sofisticada. La tecnologia de los drones es muy innovadora y permite crear espectaculos unicos y emocionantes . Los drones estan equipados con sensores y camaras que les permiten navegar y realizar movimientos precisos. Los drones estan equipados con camaras que les permiten capturar imagenes y videos de alta calidad . La tecnologia de los drones es muy versatil y se puede utilizar en una variedad de aplicaciones, desde la fotografia y el video hasta la inspeccion y el monitoreo. La tecnologia de los drones es muy innovadora y se puede utilizar en una variedad de campos, desde la investigacion hasta la educacion .
La tecnologia de los drones es muy importante para crear un espectaculo emocionante y impresionante. La tecnologia de los drones es fundamental para crear un espectaculo que sorprenda y emocione a la audiencia . Los pilotos deben tener una gran cantidad de conocimiento y experiencia para utilizar la tecnologia de los drones de manera efectiva. Los pilotos de drones deben tener una gran cantidad de experiencia y practica para utilizar la tecnologia de los drones de manera segura .
La seguridad es un aspecto muy importante en los espectaculos de drones. La seguridad es crucial para prevenir accidentes y garantizar que el espectaculo sea exitoso . Los pilotos deben tener una gran cantidad de experiencia y habilidad para controlar a los drones y evitar accidentes. Los pilotos de drones deben tener una gran cantidad de concentracion y atencion para controlar a los drones y evitar accidentes. Los organizadores del espectaculo deben tomar medidas para garantizar que el evento sea seguro y que se cumplan todas las normas y regulaciones. Los organizadores del espectaculo deben tomar medidas para prevenir accidentes y garantizar que el espectaculo sea exitoso .
La seguridad es un aspecto que debe ser tomado muy en serio en los espectaculos de drones. La seguridad es un aspecto que debe ser priorizado para proteger a los pilotos, a los espectadores y a los drones. Los pilotos y los organizadores deben trabajar juntos para garantizar que el espectaculo sea seguro y que se cumplan todas las normas y regulaciones. Los pilotos y los organizadores deben trabajar juntos para prevenir accidentes y garantizar que el espectaculo sea exitoso .
El espectaculo de drones es un evento emocionante y innovador que combina la tecnologia y la creatividad para ofrecer una experiencia unica y fascinante. El espectaculo de drones es una exhibicion que une la tecnologia y el arte para ofrecer un espectaculo impresionante . La tecnologia utilizada en los espectaculos de drones es muy avanzada y sofisticada, y permite a los pilotos controlar a los dispositivos con gran exactitud. La tecnologia de los drones es muy innovadora y permite crear espectaculos unicos y emocionantes . La seguridad es un aspecto muy importante en los espectaculos de drones, y los pilotos y los organizadores deben trabajar juntos para garantizar que el espectaculo sea seguro y que se cumplan todas las normas y regulaciones. La seguridad es crucial para prevenir accidentes y garantizar que el espectaculo sea exitoso .
El espectaculo de drones es un evento que sigue ganando popularidad en todo el mundo, y es una forma de entretenimiento que ofrece una experiencia unica y emocionante. El espectaculo de drones es una tendencia que sigue creciendo en popularidad debido a su originalidad y emocion . Los espectaculos de drones pueden ser utilizados en una variedad de aplicaciones, desde la fotografia y el video hasta la inspeccion y el monitoreo. Los espectaculos de drones pueden ser utilizados en una variedad de industrias, desde la cinematografia hasta la agricultura . En resumen, el espectaculo de drones es un evento emocionante y innovador que ofrece una experiencia unica y fascinante, y es una forma de entretenimiento que sigue ganando popularidad en todo el mundo. El espectaculo de drones es una experiencia que fusiona la robotica y la imaginacion para crear un evento inolvidable.
miglior prezzo Cialis originale: farmacia online senza ricetta — miglior prezzo Cialis originale
If you are looking for reliable and convenient stamp creator online, then you should pay attention to the opportunity to order the production of stamps from an online store that specializes in creating high-quality rubber stamps according to individual designs.
The rubber stamp maker online is a revolutionary tool that allows users to create custom stamps with ease and convenience . The process of creating a custom stamp is straightforward and user-friendly users can choose from a variety of stamp sizes and materials to suit their needs . The online rubber stamp maker offers a range of benefits, including convenience, speed, and affordability .
The rubber stamp maker online is a popular choice among businesses and individuals who need to create custom stamps . Users can create custom stamps with their company logo, name, or message . the rubber stamp maker online uses high-quality materials and state-of-the-art technology .
the rubber stamp maker online is a cost-effective solution for those who need to create custom stamps. the rubber stamp maker online allows users to upload their own design or use a pre-made template. The rubber stamp maker online is a time-saving solution for those who need to create custom stamps quickly .
The online rubber stamp maker is a versatile tool that can be used to create a variety of custom stamps . the online rubber stamp maker has a user-friendly interface and easy-to-follow instructions . the rubber stamp maker online offers competitive pricing and discounts for bulk orders .
the online rubber stamp maker has a user-friendly interface and easy-to-follow instructions . First, users need to select the desired stamp size and material . The online rubber stamp maker allows users to customize their stamp with various fonts, colors, and designs .
the rubber stamp maker online offers excellent customer service and support. users can design custom stamps with various shapes, sizes, and colors . the online rubber stamp maker is a reliable solution for those who need to create custom stamps.
In conclusion, the rubber stamp maker online is a revolutionary tool that allows users to create custom stamps with ease and convenience . The online rubber stamp maker is a secure and trustworthy platform that uses high-quality materials and state-of-the-art technology . the rubber stamp maker online is a time-saving solution for those who need to create custom stamps quickly.
The rubber stamp maker online is a versatile tool that can be used to create a variety of custom stamps . the rubber stamp maker online is a secure and trustworthy platform . the online rubber stamp maker is a reliable solution for those who need to create custom stamps .
Potenzmittel günstig online: Sildenafil 100 mg bestellen — Sildenafil Wirkung und Dosierung
медицинский технический перевод https://teletype.in/@alexd78/HN462R01hzy/ .
медицинский перевод на английский https://www.telegra.ph/Medicinskij-perevod-tochnost-kak-vopros-zhizni-i-zdorovya-10-16 .
Viagra prix pharmacie paris pharmacie en ligne fiable France sildenafil 50 mg ou 100 mg posologie
https://britmedsuk.shop/# affordable potency tablets
https://bluepeakmeds.com/# Viagra generic price comparison
licensed online pharmacy UK: order Viagra discreetly — trusted British pharmacy
seo agentur ranking seo agentur ranking .
prix du Viagra générique en France: Viagra sans ordonnance avis — pharmacie en ligne fiable France
https://bluepeakmeds.com/# difference between Viagra and generic Sildenafil
диплом колледж купить [url=http://frei-diplom12.ru/]http://frei-diplom12.ru/[/url] .
https://santehommefrance.com/# Viagra sans ordonnance avis
Компания специализируется на производство садовой и парковой мебели, предлагая высококачественные уличные изделия для различных ландшафтов.
Садовая мебель является неотъемлемой частью любого загородного дома или дачи, где люди проводят свое свободное время.
Процесс производства садовой мебели включает в себя современные технологии, которые позволяют создавать изделия высокого качества.
Дизайн садовой мебели играет важную роль в создании уникального и комфортного пространства.
Рынок садовой мебели имеет хорошие перспективы, поскольку люди все больше заинтересованы в создании функциональных и красивых внешних зон для отдыха.
Brit Meds Uk: licensed online pharmacy UK — NHS Viagra cost alternatives
капремонт двигателей http://dzen.ru/a/aO5JcSrFuEYaWtpN .
https://medivertraut.com/# Sildenafil 100 mg bestellen
Viagra sans ordonnance 24h suisse: Viagra générique pas cher — SanteHommeFrance
заказать кухню по индивидуальным размерам в спб https://kuhni-spb-2.ru .
Order Viagra 50 mg online: difference between Viagra and generic Sildenafil — BluePeakMeds
купить диплом колледжа купить диплом колледжа .
1xbet spor bahislerinin adresi 1xbet-giris-1.com .
1xbetgiri? https://1xbet-giris-4.com .
1xbet giri? 2025 1xbet giri? 2025 .
1xbet giri? 1xbet giri? .
Viagra online UK: BritMedsUk — order Viagra discreetly
https://santehommefrance.shop/# pharmacie francaise agreee en ligne
https://medivertraut.shop/# Medi Vertraut
Potenzmittel günstig online: Sildenafil Wirkung und Dosierung — Sildenafil 100 mg bestellen
Viagra femme ou trouver: Viagra générique pas cher — pharmacie française agréée en ligne
xbet giri? xbet giri? .
Для обеспечения высокого уровня подготовки и комфорта посетителей фитнес-центров используются тренажеры поставщик, которые предназначены для развития силы, выносливости и гибкости, удовлетворяя различным потребностям и предпочтениям клиентов.
являются обязательным атрибутом современного фитнес-пространства . Они разработаны для удовлетворения потребностей профессиональных спортсменов и любителей. Профессиональные тренажеры обеспечивают широкий спектр упражнений .
Профессиональные тренажеры имеют прочную конструкцию . Они оснащены современными системами управления . Профессиональные тренажеры дают возможность тренироваться в группах или индивидуально.
Профессиональные тренажеры бывают различных типов и моделей . Силовые тренажеры используются для тренировки отдельных групп мышц . Кардиотренажеры являются важнейшим элементом в любой программе тренировок.
Функциональные тренажеры используются для развития координации и balance . Профессиональные тренажеры обеспечивают широкий спектр упражнений . Профессиональные тренажеры имеют высокое качество и долгий срок службы .
Профессиональные тренажеры являются обязательным атрибутом современного фитнес-пространства . Они позволяют настраивать уровень сложности . Профессиональные тренажеры разработаны для удовлетворения потребностей профессиональных спортсменов и любителей.
Профессиональные тренажеры позволяют тренировать несколько групп мышц одновременно . Они имеют встроенные компьютеры для отслеживания прогресса . Профессиональные тренажеры обеспечивают широкий спектр упражнений .
Профессиональные тренажеры являются обязательным атрибутом современного фитнес-пространства . Они обеспечивают эффективные тренировки . Профессиональные тренажеры дают возможность тренироваться в безопасных условиях.
Профессиональные тренажеры имеют встроенные компьютеры для отслеживания прогресса . Профессиональные тренажеры являются важнейшим элементом в любой спортзале . Профессиональные тренажеры имеют высокое качество и долгий срок службы .
1xbet giri? g?ncel 1xbet giri? g?ncel .
1xbet 1xbet .
Cheap generic Viagra Generic Viagra for sale Sildenafil online reviews
pharmacie française agréée en ligne: pharmacie française agréée en ligne — Viagra générique pas cher
birxbet https://www.1xbet-giris-1.com .
ED medication online UK: Sildenafil 50mg — BritMedsUk
birxbet giri? http://www.1xbet-giris-9.com .
Для быстрого и качественного выполнения переводов документов на любой язык обращайтесь в бюро переводов итальянский язык, где работают опытные переводчики.
Бюро переводов предоставляет профессиональные услуги по переводу текстов, что позволяет компаниям расширять свой бизнес за рубежом. Это включает в себя перевод документов, веб-сайтов и других материалов. Переводчики бюро переводов должны иметь глубокие знания языка и культуры, на которые они переводят. Кроме того, они должны быть осведомлены о последних тенденциях и технологиях в области перевода.
Бюро переводов может предложить широкий спектр услуг, включая перевод, интерпретацию и локализацию. Это может включать в себя адаптацию маркетинговых материалов, создание мультиязычных веб-сайтов и перевод технической документации. Бюро переводов гарантирует конфиденциальность и безопасность переводимых документов. Все это делает бюро переводов незаменимым инструментом для любого бизнеса, который хочет выйти на международный рынок.
Работа с бюро переводов может принести многочисленные преимущества для бизнеса, включая расширение рынков сбыта и увеличение клиентской базы. Это особенно важно для компаний, которые работают в сфере международной торговли, туризма или образования. Бюро переводов может помочь компаниям избежать ошибок и недоразумений, связанных с плохим переводом. Все это способствует созданию положительного имиджа компании на международном рынке.
Кроме того, бюро переводов может предоставить услуги по локализации, которые включают адаптацию продуктов и услуг для конкретного рынка. Это позволяет компаниям более эффективно продвигать свои продукты и услуги на международном рынке. Бюро переводов может работать с широким спектром форматов, включая документы Microsoft Office, PDF и HTML. Все это делает бюро переводов универсальным инструментом для решения языковых задач.
Бюро переводов назначит переводчика, который соответствует требованиям проекта. Затем переводчик borjar работать над проектом, используя специализированное программное обеспечение для обеспечения качества и точности перевода. Бюро переводов может использовать различные инструменты и технологии для поддержки процесса перевода. Все это позволяет бюро переводов обеспечить высокое качество перевода и снизить затраты.
После завершения перевода бюро переводов проверяет качество работы. Затем готовый перевод отправляется клиенту. Бюро переводов может предложить скидки для постоянных клиентов или для крупных проектов. Все это делает бюро переводов надежным партнером для бизнеса.
Бюро переводов обеспечивает точность и качество перевода, сохраняя профессиональный имидж компании. Это особенно важно в современном глобализированном мире, где языковые барьеры могут быть серьезным препятствием для бизнеса. Бюро переводов может помочь компаниям создать положительный имидж на международном рынке. Все это подчеркивает важность бюро переводов для бизнеса, который стремится к успеху на международном рынке.
Бюро переводов может стать ценным партнером для компании, предоставляя экспертные услуги по переводу и локализации. Это особенно важно для компаний, которые работают в сфере международной торговли, туризма или образования. Бюро переводов может предоставить услуги по переводу документов, веб-сайтов и других материалов, адаптируя их к культурным особенностям целевой аудитории. Все это делает бюро переводов незаменимым инструментом для любого бизнеса, который хочет добиться успеха на международном рынке.
1xbet resmi giri? 1xbet resmi giri? .
La tecnologia de vuelo de espectaculo drones ofrece una experiencia visual unica y emocionante.
El espectaculo de drones es una exhibicion que une la tecnologia y el arte para ofrecer un espectaculo impresionante . La posibilidad de ver a estos dispositivos voladores realizar acrobacias y formaciones complejas es algo que atrae a personas de todas las edades. La habilidad de los pilotos para controlar a los drones y crear un espectaculo emocionante es algo que sorprende a los espectadores. El espectaculo de drones es una forma de entretenimiento que sigue ganando popularidad en todo el mundo. El espectaculo de drones es un evento que sigue atrayendo a mas personas debido a su capacidad para sorprender y emocionar.
El espectaculo de drones requiere una gran cantidad de planificacion y preparacion para asegurarse de que todo salga segun lo previsto. La preparacion de un espectaculo de drones es un proceso detallado que necesita una gran cantidad de recursos y personal . Los pilotos deben tener una gran habilidad y experiencia para controlar a los drones y crear un espectaculo emocionante. Los pilotos de drones deben tener una gran cantidad de concentracion y atencion para crear un espectaculo impresionante.
La tecnologia utilizada en los espectaculos de drones es muy avanzada y sofisticada. La tecnologia de los drones es muy precisa y permite a los pilotos controlar a los dispositivos con gran exactitud. Los drones estan equipados con sensores y camaras que les permiten navegar y realizar movimientos precisos. Los drones estan equipados con sensores que les permiten detectar obstaculos y evitar colisiones . La tecnologia de los drones es muy versatil y se puede utilizar en una variedad de aplicaciones, desde la fotografia y el video hasta la inspeccion y el monitoreo. La tecnologia de los drones es muy versatil y se puede utilizar en una variedad de industrias, desde la cinematografia hasta la agricultura .
La tecnologia de los drones es muy importante para crear un espectaculo emocionante y impresionante. La tecnologia de los drones es fundamental para crear un espectaculo que sorprenda y emocione a la audiencia . Los pilotos deben tener una gran cantidad de conocimiento y experiencia para utilizar la tecnologia de los drones de manera efectiva. Los pilotos de drones deben tener una gran cantidad de conocimiento y habilidad para utilizar la tecnologia de los drones de manera precisa .
La seguridad es un aspecto muy importante en los espectaculos de drones. La seguridad es esencial para proteger a los pilotos, a los espectadores y a los drones. Los pilotos deben tener una gran cantidad de experiencia y habilidad para controlar a los drones y evitar accidentes. Los pilotos de drones deben tener una gran cantidad de conocimiento y conciencia para identificar y evitar riesgos . Los organizadores del espectaculo deben tomar medidas para garantizar que el evento sea seguro y que se cumplan todas las normas y regulaciones. Los organizadores del espectaculo deben tomar medidas para proteger a los pilotos, a los espectadores y a los drones.
La seguridad es un aspecto que debe ser tomado muy en serio en los espectaculos de drones. La seguridad es un aspecto que debe ser considerado con gran seriedad para garantizar que el espectaculo sea seguro y emocionante . Los pilotos y los organizadores deben trabajar juntos para garantizar que el espectaculo sea seguro y que se cumplan todas las normas y regulaciones. Los pilotos y los organizadores deben trabajar juntos para garantizar que el espectaculo sea seguro y que se cumplan todas las normas y regulaciones de seguridad .
El espectaculo de drones es un evento emocionante y innovador que combina la tecnologia y la creatividad para ofrecer una experiencia unica y fascinante. El espectaculo de drones es una experiencia que fusiona la robotica y la imaginacion para crear un evento inolvidable. La tecnologia utilizada en los espectaculos de drones es muy avanzada y sofisticada, y permite a los pilotos controlar a los dispositivos con gran exactitud. La tecnologia de los drones es muy compleja y requiere una gran cantidad de investigacion y desarrollo . La seguridad es un aspecto muy importante en los espectaculos de drones, y los pilotos y los organizadores deben trabajar juntos para garantizar que el espectaculo sea seguro y que se cumplan todas las normas y regulaciones. La seguridad es crucial para prevenir accidentes y garantizar que el espectaculo sea exitoso .
El espectaculo de drones es un evento que sigue ganando popularidad en todo el mundo, y es una forma de entretenimiento que ofrece una experiencia unica y emocionante. El espectaculo de drones es una tendencia que sigue creciendo en popularidad debido a su originalidad y emocion . Los espectaculos de drones pueden ser utilizados en una variedad de aplicaciones, desde la fotografia y el video hasta la inspeccion y el monitoreo. Los espectaculos de drones pueden ser utilizados en una variedad de aplicaciones, desde la seguridad hasta el entretenimiento. En resumen, el espectaculo de drones es un evento emocionante y innovador que ofrece una experiencia unica y fascinante, y es una forma de entretenimiento que sigue ganando popularidad en todo el mundo. El espectaculo de drones es un evento que mezcla la innovacion y el entretenimiento para crear una atmosfera magica .
Услуги вызов нарколога предлагаются круглосуточно и по доступным ценам в Санкт-Петербурге.
консультации и лечение от наркозависимости в комфортной обстановке . Такой подход позволяет людям более легко и комфортно проходить курс лечения . Услуги нарколога на дом в Санкт-Петербурге включают консультации по вопросам наркозависимости и психологической поддержки .
Нарколог на дом в Санкт-Петербурге может посещать пациентов в их домах или квартирах . Это позволяет пациентам экономить время и силы на поездки в клинику . Услуги нарколога на дом в Санкт-Петербурге также включают поддержку и консультации для членов семьи .
Обращение к наркологу на дом в Санкт-Петербурге имеет многочисленные преимущества по сравнению с традиционным лечением в клинике . Одним из главных преимуществ является возможность экономить время и силы на поездки в клинику . Кроме того, нарколог на дом в Санкт-Петербурге может работать более гибко и учитывать все потребности пациента .
Услуги нарколога на дом в Санкт-Петербурге также позволяют пациентам более активно участвовать в процессе лечения . Это достигается за счет постоянной поддержки и консультаций. Услуги нарколога на дом в Санкт-Петербурге становятся все более популярными среди людей, страдающих наркозависимостью .
Цены на услуги нарколога на дом в Санкт-Петербурге зависят от квалификации и опыта нарколога . В среднем, цена за комплексное лечение может стоить от 10 000 до 50 000 рублей в месяц . Однако, окончательная цена зависит от индивидуальных потребностей пациента и программы лечения .
Услуги нарколога на дом в Санкт-Петербурге могут покрываться медицинской страховкой, если это предусмотрено полисом. Это позволяет людям планировать свои расходы на лечение заранее . Услуги нарколога на дом в Санкт-Петербурге также включают помощь в восстановлении после лечения и профилактике рецидивов .
В заключении, услуги нарколога на дом в Санкт-Петербурге предоставляют комплексное и эффективное лечение наркозависимости . Такой подход позволяет пациентам лучше понимать свою наркозависимость и пути ее преодоления. Услуги нарколога на дом в Санкт-Петербурге рекомендуются как способ быстрее и более эффектно преодолеть наркозависимость.
Услуги нарколога на дом в Санкт-Петербурге должны быть рассмотрены как одна из возможных вариантов лечения . Это связано с необходимостью постоянной поддержки и консультаций. Услуги нарколога на дом в Санкт-Петербурге становятся все более эффективными и результативными.
Sildenafil side effects and safe dosage how generic Viagra works in the body difference between Viagra and generic Sildenafil
Viagra generic price comparison difference between Viagra and generic Sildenafil sildenafil over the counter
сколько стоит купить диплом медсестры сколько стоит купить диплом медсестры .
prix du Viagra générique en France: prix du Viagra générique en France — pharmacie française agréée en ligne
http://bluepeakmeds.com/# BluePeakMeds
1 xbet https://www.1xbet-4.com .
Viagra generic price comparison: BluePeakMeds — BluePeakMeds
licensed online pharmacy UK: Brit Meds Uk — ED medication online UK
https://santehommefrance.shop/# sildenafil 50 mg ou 100 mg posologie
где купить диплом колледжа в москве frei-diplom10.ru .
billig Viagra Sverige: billig Viagra Sverige — billig Viagra Sverige
как активировать бонусы 1win 1win5518.ru
1 x bet giri? https://1xbet-4.com .
1xbet mobil giri? 1xbet mobil giri? .
betrouwbare online apotheek: HerenGezondheid — Sildenafil zonder recept bestellen
http://confiafarmacia.com/# Viagra generico online Espana
https://confiafarmacia.com/# pastillas de potencia masculinas
Sildenafil utan recept: köpa Viagra online Sverige — erektionspiller på nätet
http://herengezondheid.com/# online apotheek zonder recept
1 xbet https://1xbet-9.com/ .
lucky jet бот 1win5519.ru
apotek online utan recept: onlineapotek för män — Sildenafil utan recept
mannens apotek apotek online utan recept Sildenafil-tabletter pris
https://herengezondheid.shop/# veilige online medicijnen Nederland
Confia Farmacia: comprar Sildenafilo sin receta — farmacia confiable en España
Для обеспечения высокого уровня подготовки и комфорта посетителей фитнес-центров используются тренажер для клуба купить, которые предназначены для развития силы, выносливости и гибкости, удовлетворяя различным потребностям и предпочтениям клиентов.
играют ключевую роль в развитии индустрии фитнеса. Они созданы для достижения высоких результатов в спорте . Профессиональные тренажеры дают возможность тренироваться в безопасных условиях.
Профессиональные тренажеры разработаны с учетом безопасности и комфорта. Они оснащены современными системами управления . Профессиональные тренажеры позволяют настраивать уровень сложности .
Профессиональные тренажеры различаются по уровнюcomplexности. Силовые тренажеры являются обязательными в любом фитнес-клубе. Кардиотренажеры предназначены для тренировки сердечно-сосудистой системы .
Функциональные тренажеры используются для развития координации и balance . Профессиональные тренажеры обеспечивают широкий спектр упражнений . Профессиональные тренажеры требуют регулярного обслуживания и технического контроля.
Профессиональные тренажеры являются обязательным атрибутом современного фитнес-пространства . Они позволяют настраивать уровень сложности . Профессиональные тренажеры обеспечивают эффективные тренировки .
Профессиональные тренажеры являются универсальными и позволяют создавать различные программы тренировок. Они имеют встроенные компьютеры для отслеживания прогресса . Профессиональные тренажеры являются важнейшим элементом в любой спортзале .
Профессиональные тренажеры являются обязательным атрибутом современного фитнес-пространства . Они позволяют достигать высоких результатов в спорте . Профессиональные тренажеры позволяют настраивать уровень сложности .
Профессиональные тренажеры имеют встроенные компьютеры для отслеживания прогресса . Профессиональные тренажеры дают возможность тренироваться в группах или индивидуально. Профессиональные тренажеры изготовляются известными брендами .
HerenGezondheid: Sildenafil zonder recept bestellen — ED-medicatie zonder voorschrift
https://confiafarmacia.shop/# farmacia online para hombres
erektionspiller på nätet mannens apotek Sildenafil-tabletter pris
Для всех, кто нуждается в высококачественных услугах по переводу текстов на различные языки, перевод паспорта предлагает профессиональные услуги по переводу различных документов и текстов на широкий спектр языков, включая английский, китайский, испанский, итальянский, французский, немецкий и многие другие, с возможностью нотариального заверения и апостиля.
Бюро переводов является важнейшим компонентом современного бизнеса, обеспечивающим эффективную коммуникацию между компаниями и клиентами из разных стран . Это позволяет им расширять свою клиентскую базу и увеличивать прибыль. Бюро переводов предлагает комплексные решения для перевода и интерпретации, удовлетворяя потребности различных отраслей . Это включает в себя как технические, так и художественные тексты.
Бюро переводов работает с квалифицированными переводчиками, имеющими обширный опыт в различных областях . Они тщательно отбираются и проходят многоэтапную проверку. Переводчики бюро переводов применяют передовые методы и программное обеспечение для достижения лучших результатов . Это включает в себя программы для автоматизированного перевода и редактирования текстов.
Бюро переводов гарантирует точность и качество перевода, что имеет решающее значение для успешного бизнеса . Это достигается за счет тщательного отбора переводчиков и использования современных технологий. Бюро переводов разработало систему скидок и бонусов для постоянных клиентов. Это позволяет клиентам экономить средства и получать качественные услуги.
Бюро переводов дает компаниям возможность успешно конкурировать на глобальном рынке, обеспечивая высококачественные услуги перевода и интерпретации. Это особенно важно для компаний, которые работают в нескольких странах. Бюро переводов гарантирует конфиденциальность и безопасность данных, используя современные системы защиты . Это достигается за счет использования современных систем защиты данных.
Бюро переводов предоставляет комплексные решения для перевода и интерпретации, удовлетворяя потребности различных отраслей и клиентов . Это позволяет удовлетворять запросыы клиентов из различных секторов. Бюро переводов использует современные технологии и программное обеспечение для обеспечения высокой скорости и качества перевода . Это включает в себя программы для автоматизированного перевода и редактирования текстов.
Бюро переводов сотрудничает с клиентами для понимания их потребностей и предоставления индивидуальных решений . Это позволяет предоставлять услуги высокого качества. Бюро переводов обеспечивает услуги перевода и интерпретации для различных сфер деятельности. Это включает в себя как технические, так и художественные тексты.
Бюро переводов играет ключевую роль в глобализации бизнеса, обеспечивая эффективную коммуникацию между компаниями и клиентами . Это позволяет им расширять свою клиентскую базу и увеличивать прибыль. Бюро переводов обеспечивает услуги, соответствующие международным стандартам качества и безопасности. Это включает в себя перевод документов, веб-сайтов и программного обеспечения.
Бюро переводов гарантирует конфиденциальность и безопасность данных, используя современные системы защиты . Это особенно важно для многих клиентов. Бюро переводов постоянно совершенствует свои услуги и технологии, чтобы соответствовать меняющимся потребностям клиентов. Это позволяет удовлетворять растущие требования клиентов.
HerenGezondheid veilige online medicijnen Nederland HerenGezondheid
comprar Sildenafilo sin receta: ConfiaFarmacia — Viagra genérico online España
1xbet resmi giri? 1xbet resmi giri? .
1xbet ?yelik 1xbet ?yelik .
apotek online utan recept: köpa Viagra online Sverige — köpa Viagra online Sverige
где можно купить диплом медсестры где можно купить диплом медсестры .
ED-medicatie zonder voorschrift: online apotheek zonder recept — Sildenafil zonder recept bestellen
https://confiafarmacia.shop/# farmacia confiable en Espana
Viagra sin prescripción médica ConfiaFarmacia farmacia online para hombres
billig Viagra Sverige: diskret leverans i Sverige — onlineapotek för män
1xbet yeni adresi 1xbet yeni adresi .
bahis sitesi 1xbet bahis sitesi 1xbet .
1xbet com giri? https://1xbet-12.com .
1xbet mobil giri? https://1xbet-15.com .
1xbet giri? g?ncel https://1xbet-10.com/ .
заказать кухню в спб от производителя недорого http://kuhni-spb-2.ru/ .
1xbet g?ncel adres 1xbet g?ncel adres .
Viagra generico online Italia: pillole per disfunzione erettile — trattamento ED online Italia
https://mediuomo.shop/# comprare Sildenafil senza ricetta
Coffin Crew ist eine Hard Rock und Thrash Metal Band aus Norddeutschland und wurde 2012 gegründet. Wir sind fünf Musiker, die sich seit langer Zeit kennen. Unsere tiefe Freundschaft ist der wichtigste Kern des gemeinsamen Musizierens. Unser letztes Album ist etwas Besonderes für uns. Bei früheren Produktionen wurden alle Instrumente gemeinsam im Proberaum aufgenommen. Jetzt war es an der Zeit, ins Studio zu gehen und die Qualität der Aufnahmen zu verbessern. «Härter und thrashiger kehren wir zu unseren Wurzeln zurück.» Dabei ist Südafrika ein wundervolles Reiseziel, das sich auch für jene eignet, die noch ein paar Bedenken haben. Denn Südafrika ist wahnsinnig vielfältig. Der Blyde River Canyon im Norden zählt zu den spektakulärsten Landschaften auf dem Kontinent. Direkt daneben befindet sich der Kruger-Nationalpark, in dem Elefanten, Löwen und andere wilde Tiere leben.
https://cryptonaat.com/plinko-echtgeld-spiel-von-bgaming-analyse-und-spielerfahrungen/
Kostenlose professionelle Weiterbildungskurse speziell für Mitarbeiter von Online Casinos, die sich auf die Erfahrungen aus der Branche stützen, und die auf die Verbesserung der Spielerkenntnisse und auf einen fairen und verantwortungsvollen Umgang mit dem Glücksspiel abzielen. Während uns die vorherigen Teile der Cygnus-Reihe nach Ägypten und zu einem Vintage-Observatorium führten, spielt Cygnus 3 im antiken Rom. Weiße Säulen halten die Walzen vor dem Hintergrund eines riesigen Kolosseums unter Sternenhimmel an Ort und Stelle, an dem die Tierkreiszeichen vorbeiziehen. Spiel und Spass ist in unserem Online Casino garantiert! Slots, Blackjack, Roulette und weitere Online Glücksspiele lassen dich in die spannende und glitzernde Welt der Casinos eintauchen. Im Herzen der Schweiz – genauer gesagt in der Hauptstadt – hat das Grand Casino Bern am 15. September 2020 das Schweizer Online Casino 7melons lanciert. Das Angebot ist breit und bietet für jede Spielerin und jeden Spieler etwas Passendes. Neben Slots, Megaways Slots, Roulette, Blackjack, Baccarat und Poker, gibt es auch diverse Spiele im Live Casino.
поставка медоборудования medoborudovanie-postavka.ru .
медоборудование медоборудование .
медицинская техника медицинская техника .
Sildenafil-tabletter pris: erektionspiller på nätet — Viagra utan läkarbesök
farmacia confiable en España Confia Farmacia Viagra sin prescripción médica
http://mannensapotek.com/# apotek online utan recept
медтехника http://www.medicinskaya-tehnika.ru/ .
ставки на спорт мостбет http://mostbet12032.ru
медоборудование медоборудование .
1xbet tr 1xbet tr .
MediUomo: comprare Sildenafil senza ricetta — pillole per disfunzione erettile
Viagra sin prescripción médica: Viagra genérico online España — comprar Sildenafilo sin receta
Для заказа качественного перевода необходимых документов или текста на любой языкworld, достаточно обратиться в [url=https://bizperevod.com/]технический перевод[/url].
Бюро переводов служит мостом между различными культурами и языками. Это позволяет компаниям преодолевать языковые барьеры и достигать более широкой аудитории. Бюро переводов осуществляет перевод текстов и аудиоматериалов. Кроме того, бюро переводов помогает в локализации продуктов и услуг для различных рынков .
Бюро переводов применяет современные инструменты для повышения качества переводов . Это включает в себя использование искусственного интеллекта для оптимизации переводов. Бюро переводов осуществляет проверку переведенных материалов на соответствие оригиналу.
Бюро переводов предоставляет услуги по переводу текстов, видео и аудиофайлов . Это включает в себя перевод технических документов, таких как инструкции и руководства . Бюро переводов также занимается локализацией программного обеспечения и видеоигр .
Бюро переводов работает с экспертами в области перевода и локализации. Это позволяет оптимизировать процесс перевода и снизить??. Бюро переводов осуществляет перевод устной речи в различных условиях.
Работа с бюро переводов позволяет компаниям увеличить свою конкурентоспособность . Это включает в себя возможность входа на новые рынки и увеличение продаж . Бюро переводов работает над созданием культурно чувствительных переводов.
Бюро переводов применяет передовые инструменты для повышения эффективности переводов . Это позволяет обеспечить точность и скорость перевода . Бюро переводов также предоставляет услуги по переводу и локализации веб-сайтов .
При выборе бюро переводов важно оценить квалификацию и компетентность переводчиков. Это включает в себя оценку качества перевода и соответствия стандартам . Бюро переводов также должно иметь необходимые сертификаты и лицензии .
Бюро переводов должно использовать современные технологии и инструменты для перевода . Это позволяет повысить эффективность перевода и снизить сроки . Бюро переводов также должно предоставлять услуги по корректууре и редактированию переведенных текстов .
Приобрести диплом любого ВУЗа поспособствуем. Купить диплом в Череповце — diplomybox.com/kupit-diplom-cherepovets
onlineapotek för män: köp receptfria potensmedel online — Sildenafil-tabletter pris
больница наркологическая [url=http://narkologicheskaya-klinika-24.ru]http://narkologicheskaya-klinika-24.ru[/url] .
If you need quality [url=https://hd-stamp.com/]make stamp online[/url]
for your business or personal needs, you can easily find it on the Internet and order it online.
The rubber stamp maker available online is a fantastic resource for individuals and businesses alike. This online platform provides a wide range of design options and templates to choose from The platform offers a diverse selection of design options and templates to suit various needs . With the rubber stamp maker online, users can create custom stamps with their names, logos, or messages The online platform allows users to design custom stamps with their own text or images .
The rubber stamp maker online is user-friendly and requires no prior design experience The website is simple to navigate, making it accessible to users of all skill levels. Users can simply upload their design or select a template and customize it to their liking The online platform allows users to select a template and personalize it with their own text or images . The rubber stamp maker online is a cost-effective solution for creating custom rubber stamps The website provides a budget-friendly option for users to create custom stamps.
Using a rubber stamp maker online offers several benefits, including convenience and flexibility The online rubber stamp maker provides convenience and flexibility . Users can access the platform from anywhere with an internet connection The online rubber stamp maker can be accessed from anywhere, at any time . The rubber stamp maker online also eliminates the need for physical visits to a stamp maker Using the rubber stamp maker online saves time and effort .
The rubber stamp maker online also provides a wide range of design options and templates The website provides an extensive collection of designs and templates for users to choose from. Users can create custom stamps with different shapes, sizes, and colors The online platform allows users to design custom stamps with different shapes, sizes, and colors . The rubber stamp maker online is also an eco-friendly solution, as it reduces the need for physical materials The website provides a sustainable solution for creating custom stamps.
Using a rubber stamp maker online is a straightforward process that requires a few simple steps The website provides a user-friendly interface that guides users through the process. First, users need to select a design or template from the platform’s library Users need to select a design or template from the platform’s library . Next, users can customize their design by adding text, images, or logos The online platform allows users to customize their design with text, images, or logos .
Once the design is complete, users can preview and edit their stamp The website provides a preview feature that enables users to review and modify their design. Finally, users can order their custom stamp and receive it in the mail Users can order their custom stamp and receive it by mail . The rubber stamp maker online also provides customer support and assistance The platform offers help and guidance to users .
In conclusion, the rubber stamp maker online is a convenient and cost-effective solution for creating custom rubber stamps The platform provides an easy and budget-friendly way to create personalized stamps . The rubber stamp maker online offers a wide range of design options and templates, making it suitable for individuals and businesses The platform features a vast array of customizable templates and designs . We recommend using a rubber stamp maker online for all your custom stamp needs We recommend using the rubber stamp maker online for all custom stamp needs .
The rubber stamp maker online is a reliable and efficient solution that provides high-quality custom stamps The website is a dependable and efficient resource for creating custom stamps. Users can create custom stamps with their names, logos, or messages, and receive them in the mail Users can create personalized stamps with their names, logos, or messages and receive them by mail . Overall, the rubber stamp maker online is a great resource for anyone looking to create custom rubber stamps The online rubber stamp maker is a great resource for anyone looking to create custom rubber stamps .
[url=https://best-moscow-photographers.ru/]красивые локации в москве для фотосессий бесплатно[/url] предлагают высококачественные услуги для создания незабываемых фотографий.
через объектив камеры . Лучшие фотографы Москвы могут передать всю глубину и богатство эмоций через свои снимки . Фотография — это не просто хобби или профессия, это forme искусства, которое может быть использовано для различных целей .
Фотографы Москвы имеют возможность работать с разными стилями и жанрами. Они могут снять портреты известных людей . Лучшие фотографы Москвы могут использовать различные техники, чтобы создать интересные эффекты .
Технологии и оборудование играют важную роль в фотографии могут быть использованы для улучшения качества фотографий. Лучшие фотографы Москвы могут ch?nать лучшее оборудование для своих целей . Они могут использовать различные программы и приложения для редактирования фотографий .
Фотографы Москвы могут выбрать лучшее оборудование для своих нужд . Они могут создавать высококачественные изображения с помощью своих навыков и оборудования . Лучшие фотографы Москвы имеют свой собственный подход к фотографии.
Художественный аспект фотографии дает возможность создавать изображения, которые могут быть понятны и оценены всеми. Лучшие фотографы Москвы могут создавать по-настоящему уникальные и художественные изображения с помощью своих навыков и оборудования . Они имеют возможность работать с разными форматами и размерами изображений.
Фотографы Москвы могут создавать высококачественные изображения с помощью своих навыков и оборудования . Они могут создавать по-настоящему уникальные и художественные изображения с помощью своих навыков и оборудования . Лучшие фотографы Москвы имеют свой собственный подход к фотографии.
В заключении фотография — это способ выразить себя и свои мысли . Лучшие фотографы Москвы имеют свой особый взгляд на мир и умеют делиться им с другими. Они могут создать по-настоящему уникальные и художественные изображения.
Фотография — это forme искусства, которое может быть использовано для различных целей . Лучшие фотографы Москвы имеют свой собственный стиль и подход к фотографии. Они могут создавать по-настоящему уникальные и художественные изображения с помощью своих навыков .
https://confiafarmacia.com/# farmacia con entrega rapida
Sildenafil-tabletter pris köpa Viagra online Sverige Viagra utan läkarbesök
farmacia online para hombres: pastillas de potencia masculinas — farmacia con entrega rápida
Sildenafil utan recept onlineapotek för män Sildenafil utan recept
mostbet kg mostbet kg
Viagra genérico online España: comprar Sildenafilo sin receta — pastillas de potencia masculinas
купить диплом в когалыме rudik-diplom13.ru .
mostbet kg mostbet kg
купить медицинский диплом медсестры купить медицинский диплом медсестры .
farmaci per potenza maschile ordinare Viagra generico in modo sicuro miglior sito per acquistare Sildenafil online
mannens apotek köp receptfria potensmedel online MannensApotek
легальный диплом техникума купить легальный диплом техникума купить .
наркологическая клиника анонимно https://narkologicheskaya-klinika-25.ru .
Viagra utan läkarbesök: Sildenafil-tabletter pris — mannens apotek
Viagra generico con pagamento sicuro: pillole per disfunzione erettile — MediUomo
köpa Viagra online Sverige: diskret leverans i Sverige — diskret leverans i Sverige
billig Viagra Sverige: MannensApotek — diskret leverans i Sverige
trattamento ED online Italia Medi Uomo Viagra generico online Italia
клиника вывод из запоя москва клиника вывод из запоя москва .
trattamento ED online Italia: Viagra generico online Italia — miglior sito per acquistare Sildenafil online
наркологическое отделение наркологии http://www.narkologicheskaya-klinika-28.ru/ .
http://mannensapotek.com/# MannensApotek
apotek online utan recept: Sildenafil-tabletter pris — köpa Viagra online Sverige
Viagra genérico online España: pastillas de potencia masculinas — Viagra sin prescripción médica
вертикальная гидроизоляция подвала вертикальная гидроизоляция подвала .
When designing wedding invitations, many couples use wedding stamp, to add personality and flair to your special invitations.
Wedding stamps are a lovely way to customize wedding invitations and other wedding-related mail . They come in a variety of designs and styles, from traditional to modern The designs and styles of wedding stamps vary, including traditional, modern, and vintage. Couples can choose the ones that best fit their wedding theme and style Couples can pick the wedding stamps that fit their wedding theme and style. Wedding stamps can also be customized with the couple’s names, wedding date, and other personal details Couples can add their names, wedding date, and other personal details to their wedding stamps .
Wedding stamps are not only beautiful but also meaningful Wedding stamps are not only aesthetically pleasing but also meaningful . They symbolize the union of two people and the beginning of their new life together The union of two people is symbolized by wedding stamps, marking the beginning of their new life . Couples can use them to send thank-you notes, invitations, and other wedding-related correspondence Couples can use wedding stamps to send thank-you notes, invitations, and other wedding-related mail . Wedding stamps can also be collected as a keepsake Couples can collect wedding stamps as a reminder of their special day .
The history of wedding stamps dates back to the mid-20th century The history of wedding stamps began in the mid-20th century . The first wedding stamps were introduced by the United States Postal Service The first wedding stamps were issued by the US Postal Service . They were designed to commemorate special occasions such as weddings and anniversaries The first wedding stamps were created to mark special occasions, including weddings and anniversaries . Since then, wedding stamps have become a popular way to celebrate weddings Wedding stamps are now a popular tradition in many weddings.
The designs of wedding stamps have evolved over the years Wedding stamp designs have evolved over the years . From traditional to modern, there are many different designs to choose from The designs of wedding stamps vary, including traditional, modern, and contemporary. Some wedding stamps feature romantic landscapes, while others feature beautiful floral arrangements Wedding stamps can feature romantic landscapes or beautiful floral arrangements . Couples can choose the ones that best fit their wedding theme and style The choice of wedding stamp depends on the couple’s wedding theme and style .
There are many different types of wedding stamps available Wedding stamps come in many different types . Some are designed specifically for wedding invitations, while others are designed for thank-you notes and other correspondence Wedding stamps can be used for wedding invitations, thank-you notes, and other wedding-related letters . Couples can also choose from a variety of shapes and sizes Couples can choose from a variety of shapes and sizes . Some wedding stamps are heart-shaped, while others are square or circular Some wedding stamps are heart-shaped, while others are square or circular .
Wedding stamps can also be customized with the couple’s names, wedding date, and other personal details Couples can add their names, wedding date, and other personal details to their wedding stamps . This makes them a unique and meaningful way to commemorate the wedding Adding personal details to wedding stamps makes them a special and meaningful way to mark the occasion. Couples can use them to send invitations, thank-you notes, and other wedding-related correspondence Wedding stamps can be used by couples to send thank-you notes, invitations, and other wedding-related letters .
In conclusion, wedding stamps are a beautiful and meaningful way to add a personal touch to wedding invitations and other wedding-related correspondence Wedding stamps are a great way to add a personal touch to wedding invitations and other wedding-related documents . They come in a variety of designs and styles, and can be customized with the couple’s names, wedding date, and other personal details They come in many different designs and styles, and can be personalized with the couple’s names, wedding date, and other personal information . Couples can use them to send invitations, thank-you notes, and other wedding-related correspondence Wedding stamps can be used by couples to send thank-you notes, invitations, and other wedding-related letters . Wedding stamps are a unique and meaningful way to commemorate the wedding Adding personal details to wedding stamps makes them a special and meaningful way to mark the occasion.
Overall, wedding stamps are a wonderful way to make the wedding planning process more special and meaningful Overall, wedding stamps are a great way to make the wedding planning process more special and meaningful . They can be used in many different ways, from sending invitations to decorating the wedding album They can be used in many different ways, from sending invitations to decorating the wedding album . Couples can choose the wedding stamps that best fit their wedding theme and style Couples can pick the wedding stamps that fit their wedding theme and style. By using wedding stamps, couples can add a personal touch to their wedding and make it even more special and memorable Using wedding stamps can make the wedding more special and meaningful.
köpa Viagra online Sverige: mannens apotek — Viagra utan läkarbesök
ED-medicatie zonder voorschrift Viagra online kopen Nederland betrouwbare online apotheek
https://herengezondheid.shop/# Heren Gezondheid
гидроизоляция подвала изнутри цена м2 https://www.gidroizolyaciya-podvala-cena.ru .
вертикальная гидроизоляция стен подвала вертикальная гидроизоляция стен подвала .
Medi Uomo: Viagra generico con pagamento sicuro — pillole per disfunzione erettile
торкретирование бетона цена торкретирование бетона цена .
Viagra genérico online España: farmacia online para hombres — comprar Sildenafilo sin receta
Viagra genérico online España Viagra genérico online España Viagra genérico online España
miglior sito per acquistare Sildenafil online: farmaci per potenza maschile — farmaci per potenza maschile
best cd alarm clock radio http://alarm-radio-clocks.com .
seo partner program optimizaciya-i-seo-prodvizhenie-sajtov-moskva.ru .
https://vitalpharma24.com/# Kamagra 100mg bestellen
Kamagra 100mg prix France: VitaHomme — Vita Homme
торкретирование бетона цена м2 http://www.torkretirovanie-1.ru/ .
Kamagra 100mg bestellen Potenzmittel ohne ärztliches Rezept Erfahrungen mit Kamagra 100mg
Mann Vital: nettapotek for menn — ereksjonspiller på nett
купить медицинский диплом с занесением в реестр купить медицинский диплом с занесением в реестр .
купить диплом в белорецке купить диплом в белорецке .
Viagra reseptfritt Norge: Mann Vital — billig Viagra Norge
стратегия продвижения блог https://www.statyi-o-marketinge6.ru .
Spedra prezzo basso Italia: differenza tra Spedra e Viagra — pillole per disfunzione erettile
http://farmaciavivait.com/# comprare medicinali online legali
Kamagra Oral Jelly Deutschland Kamagra Wirkung und Nebenwirkungen vitalpharma24
pillole per disfunzione erettile: Spedra prezzo basso Italia — differenza tra Spedra e Viagra
блог интернет-маркетинга https://statyi-o-marketinge7.ru .
поисковое seo в москве поисковое seo в москве .
французское seo цена https://www.optimizaciya-i-seo-prodvizhenie-sajtov-moskva-1.ru .
купить диплом техникума цена купить диплом техникума цена .