На плате Maixduino есть 3 последовательных порта (UART): "/dev/uart1", "/dev/uart2" и "/dev/uart3". Первый порт ("/dev/uart1") используется FreeRTOS как порт для отладки и прошивки. По этому не рекомендуется использовать, а два других порта можно использовать для обмена данными с внешними устройствами.
В этом уроке настроим последовательный порт (UART), напишем пример программы и будем передавать данные между Maixduino и компьютером.
Настройка UART порта
Перед использованием последовательного порта его необходимо настроить. Сначала в файле project_cfg.h мы устанавливаем контакты (пины) Rx и Tx. Более подробно о настройке выходов / входов вы можете прочитать в первом уроке: Урок 1. Кнопка, светодиод. Функции управления вводом/выводом. Первая программа.
#ifndef PROJECT_CFG_H
#define PROJECT_CFG_H
#include <pin_cfg.h>
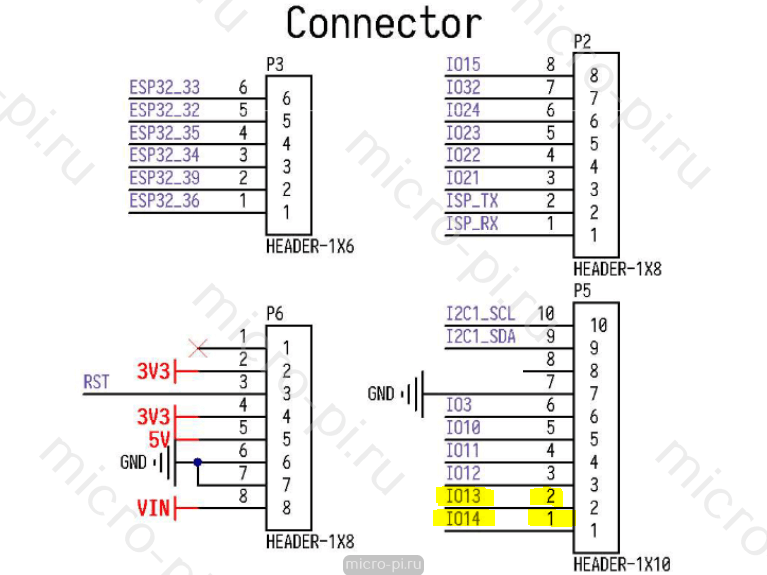
#define UART1_RX_PIN (13)
#define UART1_TX_PIN (14)
const fpioa_cfg_t g_fpioa_cfg = {
/* Версия */
.version = PIN_CFG_VERSION,
/* Число функций */
.functions_count = 2,
/* Офисание функций */
.functions = {
/* */
{UART1_RX_PIN, FUNC_UART2_RX},
{UART1_TX_PIN, FUNC_UART2_TX},
},
};
#endif
Rx и Tx устанавлны на контакты 13 и 14 соответственно.
После этого необходимо открыть устройство uart2 с помощью функции io_open.
/* Открываем UART2 устройство */
gpio = io_open("/dev/uart2");
И наконец настраиваем скорость COM порта, биты данных, количество стоп-бит и бит четности.
uart_config(uart2, 115200, 8, UART_STOP_1, UART_PARITY_NONE);
Также задаём тайм-аут для чтения:
uart_set_read_timeout(uart2, UINT32_MAX);
Примеры программ с UART
Напоследок приведу пример программы. В этой программе мы настроим выходной контакт, на этот контакт будет установлен светодиод, который будет мигать с определенным интервалом. Порт UART2 также будет настроен для обмена данными между Maixduino и компьютером. Миганть светодиодом будет задача static void blinkLedTask(void *pvParameters), принимать и передать данных по UART — static void uartTask(void *pvParameters).
Всё это дело выглядит следующим образом:

Чтобы лучше понять, как работает программа, почти к каждой строчке кода были добавлены комментарии.
Схема подключения
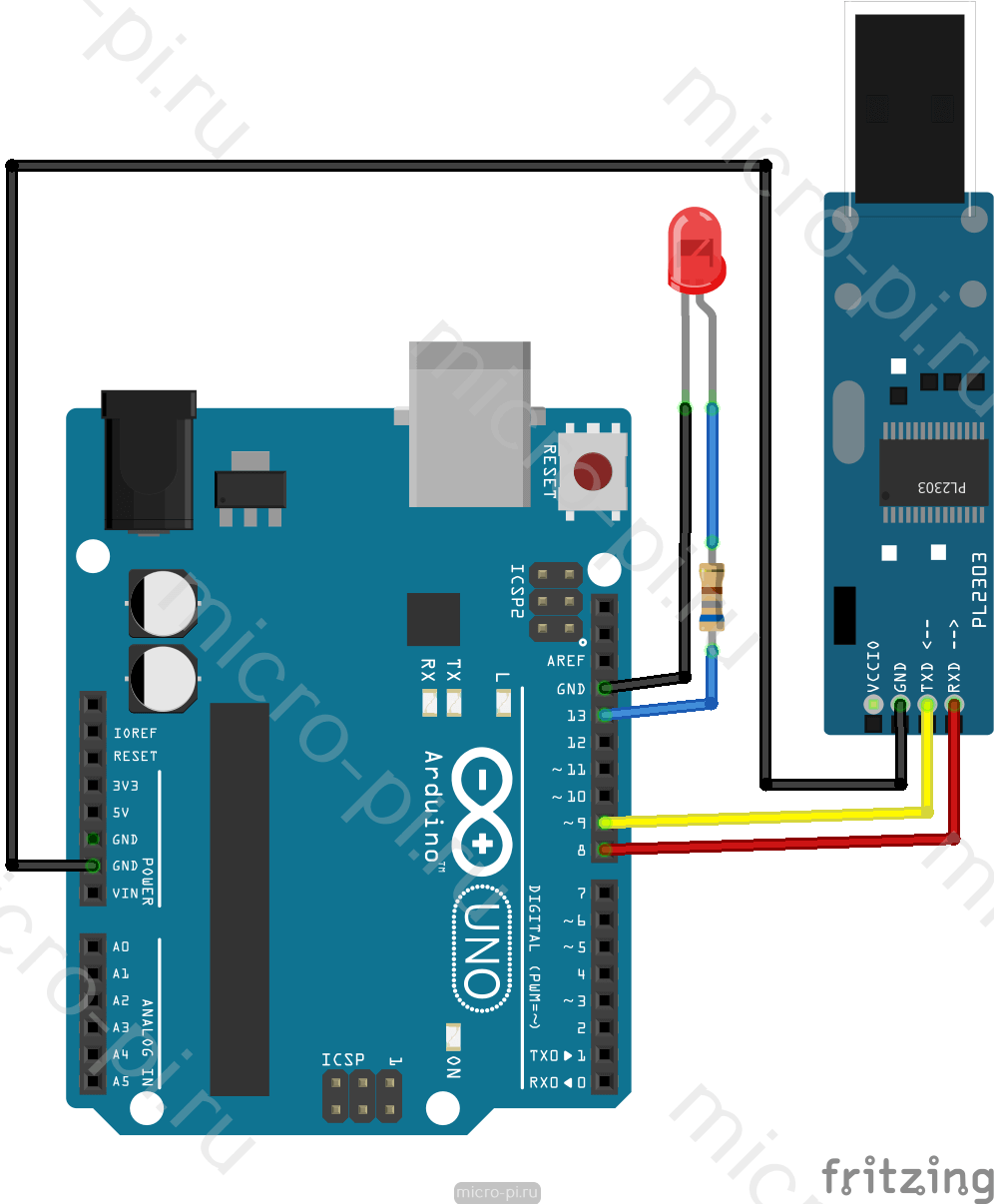
Светодиод подключается на 13-й контакт Maixduino/Arduino через резистор, ограничивающий ток. Преобразователь USB-UART подключается к контактам 8 и 9, Rx и Tx соответственно. В качестве конвертера можно использовать: PL2303, CH340, CP2102 или любой другой доступный.
Файл project_cfg.h
#ifndef PROJECT_CFG_H
#define PROJECT_CFG_H
#include <pin_cfg.h>
/**
* Номер внутреннего пина
*/
#define LED_IO (0)
/**
* Номер физического пина
*/
#define LED_PIN (3)
#define UART1_RX_PIN (13)
#define UART1_TX_PIN (14)
const fpioa_cfg_t g_fpioa_cfg = {
/* Версия */
.version = PIN_CFG_VERSION,
/* Число функций */
.functions_count = 3,
/* Офисание функций */
.functions = {
/* */
{LED_PIN, static_cast<fpioa_function_t>(FUNC_GPIOHS0 + LED_IO)},
{UART1_RX_PIN, FUNC_UART2_RX},
{UART1_TX_PIN, FUNC_UART2_TX},
},
};
#endif
Файл main.cpp
#include "project_cfg.h"
#include <FreeRTOS.h>
#include <devices.h>
#include <string.h>
#include <syslog.h>
#include <task.h>
/**
* Указатель на устройство UART 2
*/
static handle_t uart2;
/**
* Указатель на устройство GPIO
*/
static handle_t gpio;
/**
* Текущее состояние светодиода
*/
static gpio_pin_value_t ledState;
/**
* Прототип задачи включения/выключения светодиода
*
* @param pvParameters Функции задач принимают параметр, имеющий тип указателя на void (т. е. void*).
* Значение, указанное в pvParameters, будет передано в задачу.
*/
static void blinkLedTask(void *pvParameters);
static void uartTask(void *pvParameters);
int main() {
BaseType_t retCode;
const char helloMessage[] = "hello uart!\r\n";
/* Открываем GPIO0 устройство */
gpio = io_open("/dev/gpio0");
/* Перехват ошибок в процессе разработки */
configASSERT(gpio);
/* Открываем uart2 устройство */
uart2 = io_open("/dev/uart2");
/* Перехват ошибок в процессе разработки */
configASSERT(uart2);
/* Устанавливаем режим работы LED_IO пина на выход. */
gpio_set_drive_mode(gpio, LED_IO, GPIO_DM_OUTPUT);
/* Задаём начальное состояние светодиода (выключаем) */
ledState = GPIO_PV_LOW;
/* Пишем состояние в пин */
gpio_set_pin_value(gpio, LED_IO, ledState);
uart_config(uart2, 115200, 8, UART_STOP_1, UART_PARITY_NONE);
uart_set_read_timeout(uart2, UINT32_MAX);
/* Создаём задачу с мигающим светодиодом */
retCode = xTaskCreateAtProcessor(0, blinkLedTask, "Blink Led task", 512, nullptr, 3, nullptr);
/* Проверяем, если задача была успешно создана */
if (retCode == pdPASS) {
/* В случае успеха выводим информационное сообщение */
LOGI("MFRB", "Blink Led task is running");
} else {
/* В случае неудачи выводим предупреждающее сообщение */
LOGW("MFRB", "Blink Led task start problems");
}
/* Создаём задачу с мигающим светодиодом */
retCode = xTaskCreateAtProcessor(1, uartTask, "Uart Task task", 1024, nullptr, 3, nullptr);
/* Проверяем, если задача была успешно создана */
if (retCode == pdPASS) {
/* В случае успеха выводим информационное сообщение */
LOGI("MFRB", "Uart Task task is running");
} else {
/* В случае неудачи выводим предупреждающее сообщение */
LOGW("MFRB", "Uart Task task start problems");
}
io_write(uart2, (uint8_t *)helloMessage, strlen(helloMessage));
for (;;) {
}
return 0;
}
static void blinkLedTask(void *pvParameters) {
/* Время повторения */
unsigned int timeInMs;
for (;;) {
/* Меняем состояние в 1/0 */
if (GPIO_PV_HIGH == ledState) {
ledState = GPIO_PV_LOW;
timeInMs = 900;
} else {
ledState = GPIO_PV_HIGH;
timeInMs = 100;
}
/* Пишем новое состояние в пин */
gpio_set_pin_value(gpio, LED_IO, ledState);
/* Помещаем задачу в состояние Blocked на фиксированное количество тиков прерываний.
Находясь в состоянии Blocked, задача не использует процессорное время,
поэтому процессор загружен только полезной работой.
С помощью макроса pdMS_TO_TICKS мы конвертируем миллисекунды в тики */
vTaskDelay(pdMS_TO_TICKS(timeInMs));
}
}
static void uartTask(void *pvParameters) {
/* Полученный символ */
uint8_t receivedChar = 0;
for (;;) {
/* */
if (io_read(uart2, &receivedChar, 1) < 0) {
/* Предупреждение о тайм-ауте */
LOGW("MFRB", "time out");
} else {
/* Отправка символа обратно */
io_write(uart2, &receivedChar, 1);
}
}
}
Результат
После компиляции программы и прошивки контроллера подключаемся к компьютеру через конвертер USB-UART. Открываем Arduino IDE, выбираем порт, который соответствует преобразователю, и открываем монитор порта.
Если нажать кнопку «RESET«, в консоли должно появиться сообщение «hello uart!«.
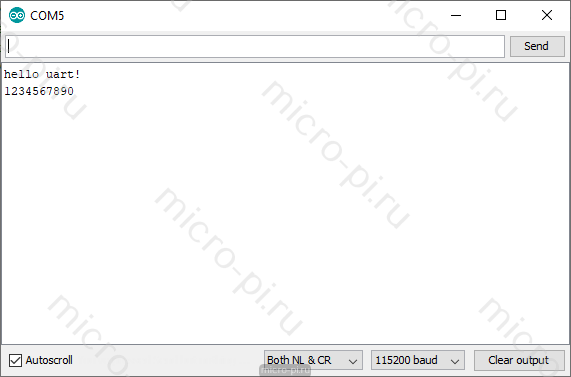 После появления сообщения мы можем отправить несколько символов (к примеру 1235467890), и мы получим эти символы обратно.
После появления сообщения мы можем отправить несколько символов (к примеру 1235467890), и мы получим эти символы обратно.
Материалы
Kendryte · GitHub
Maixduino-4.30(schematic)
Maixduino — одноплатный компьютер с ускорителем AI, RISC-V AI, форм-фактор Arduino и беспроводной модуль ESP32
Kopen een echt en geregistreerd rijbewijs van onze website zonder examens te schrijven of de oefentest te doen. alles wat we nodig hebben zijn uw gegevens en deze zouden binnen de komende acht dagen in het systeem worden geregistreerd. rijbewijs kopen belgië, rijbewijs kopen belgie, rijbewijs kopen in nederland, rijbewijs b belgie, rijbewijs kopen met registratie.
kmjn
Kup prawo jazdy dla wszystkich krajów strefy UE
Test na prawo jazdy. Egzamin na prawo jazdy jest zawsze bardzo trudnym zadaniem dla większości osób. Wynika to z napiętego charakteru egzaminu teoretycznego na prawo jazdy i egzaminu praktycznego na prawo jazdy. My jednak zapewniamy prawo jazdy bez konieczności zdawania egzaminu na prawo jazdy. W ten sposób oszczędzamy dużo pieniędzy i czasu. Ponieważ uczęszczanie do szkoły jazdy kosztuje dużo pieniędzy i czasu. Możemy zapewnić prawo jazdy osobom, które potrafią prowadzić, ale nie mają czasu na egzamin. Zapewniamy również dla osób, które nie mogą prowadzić.
Pomożemy Ci zdać zarówno praktyczny, jak i teoretyczny certyfikat nurkowy w ciągu kilku dni roboczych i pomożemy Ci uzyskać prawdziwe i zarejestrowane prawo jazdy, abyś nie musiał stresować się pisaniem trudnych egzaminów i poświęcać tyle czasu i pieniędzy.
legalne prawo jazdy do kupienia, pilnie kupie prawo jazdy, gdzie można kupić prawo jazdy z wpisem do rejestru, kupie prawo jazdy, kup prawo jazdy, kupić prawo jazdy, kupię prawo jazdy, jak kupić prawo jazdy, gdzie kupić prawo jazdy kat b, kupię prawo jazdy kat b, kupno prawa jazdy, gdzie kupic prawo jazdy, kupie prawo jazdy b, kupno prawa jazdy kat b, prawo jazdy do kupienia, jak kupic prawo jazdy kat b, jak kupić prawo jazdy w polsce, kupie prawo jazdy kat a, gdzie kupić prawo jazdy, kupie prawo jazdy kat b
Kup prawdziwe i zarejestrowane prawo jazdy na naszej stronie bez konieczności przystępowania do egzaminu lub egzaminu praktycznego. Potrzebujemy jedynie Twoich danych, które w ciągu najbliższych ośmiu dni zostaną wprowadzone do systemu. Prawo jazdy musi przejść ten sam proces rejestracji, co licencje wydawane przez szkoły nauki jazdy.
legalne prawo jazdy do kupienia, pilnie kupie prawo jazdy, gdzie można kupić prawo jazdy z wpisem do rejestru, kupie prawo jazdy, kup prawo jazdy, kupić prawo jazdy, kupię prawo jazdy, jak kupić prawo jazdy, gdzie kupić prawo jazdy kat b, kupię prawo jazdy kat b, kupno prawa jazdy, gdzie kupic prawo jazdy, kupie prawo jazdy b, kupno prawa jazdy kat b, prawo jazdy do kupienia, jak kupic prawo jazdy kat b, jak kupić prawo jazdy w polsce, kupie prawo jazdy kat a, gdzie kupić prawo jazdy, kupie prawo jazdy kat b
Adquiera un permiso de conducir real y registrado en nuestro sitio web sin tener que realizar una prueba o examen práctico. Lo único que necesitamos son sus datos de contacto, que se introducirán en el sistema en un plazo de ocho días. El permiso está sujeto al mismo procedimiento de registro que los permisos expedidos por las autoescuelas.
comprar carnet de conducir, comprar carnet de conducir dgt, comprar carnet de conducir b, comprar carnet de conducir en valencia, comprar carnet de conducir precio, carnet de conducir comprar, comprar el carnet de conducir, comprar carnet de conducir legal, comprar carnet de conducir en españa, comprar el carnet de conducir legal, comprar carnet de conducir legal sin examen barato, comprar carnet de conducir sin examen, comprar carnet de conducir legal en españa, comprar carnet de conducir español, comprar licencia de conducir
Koupit řidičský průkaz pro všechny země EU
Zkouška na řidičský průkaz. Zkouška na řidičský průkaz je pro většinu lidí vždy velmi obtížným úkolem. Důvodem je napjatá povaha teoretické zkoušky na řidičský průkaz a praktické zkoušky na řidičský průkaz. My vám však poskytneme řidičský průkaz, aniž byste museli absolvovat zkoušku na řidičský průkaz. Tímto způsobem ušetříme spoustu peněz a času. Protože účast v autoškole stojí spoustu peněz a času. Můžeme poskytnout řidičský průkaz lidem, kteří umí řídit, ale nemají čas na zkoušku. Poskytujeme také pro lidi, kteří neumějí řídit.
Pomůžeme vám složit praktickou i teoretickou potápěčskou zkoušku během několika pracovních dnů a pomůžeme vám získat skutečný a registrovaný řidičský průkaz, který si nemusíte stresovat psaním náročných zkoušek a utrácet tolik času a peněz.
koupit řidičský průkaz , kde koupit řidičský průkaz , dá se koupit řidičský průkaz
Koop een echt en geregistreerd rijbewijs op onze website zonder dat je een examen of praktijkexamen hoeft af te leggen. We hebben alleen je gegevens nodig, die binnen acht dagen in het systeem worden ingevoerd. Het rijbewijs moet hetzelfde registratieproces doorlopen als rijbewijzen die door rijscholen worden afgegeven.
Rijbewijs kopen , rijbewijs kopen betrouwbaar , rijbewijs b kopen in belgie , rijbewijs kopen belgie , rijbewijs koop , en belgisch rijbewijs kopen , koop een rijbewijs , rijbewijs b kopen , rijbewijs kopen legaal , rijbewijs kopen nederland , rijbewijs kopen online , belgisch rijbewijs kopen
Achetez un permis de conduire réel et enregistré sur notre site web sans devoir passer un test ou un examen pratique. Nous n’avons besoin que de vos coordonnées, qui seront saisies dans le système dans les huit jours. Le permis doit être soumis à la même procédure d’enregistrement que les permis délivrés par les auto-écoles.
acheter permis de conduire , acheter un permis de conduire , acheter permis de conduire enregistré en préfecture prix , acheter un permis de conduire belge , acheter le permis de conduire ,acheter le permis ,achat de permis de conduire ,acheter permis de conduire en ligne , acheter permis de conduire en ligne , acheter un permis de conduire français , acheter un permis de conduire enregistré en ligne , j’ai acheter mon permis de conduire sur internet , permis de conduire suisse , acheter permis
Kupite vozačku dozvolu za sve zemlje EU
Ispit za vozačku dozvolu. Vozački ispit uvijek je vrlo težak zadatak za većinu ljudi. To je zbog napete prirode teorijskog vozačkog ispita i praktičnog vozačkog ispita. No, vozačku dozvolu nudimo bez potrebe za polaganjem vozačkog ispita. Na ovaj način štedimo mnogo novca i vremena. Jer pohađanje autoškole košta puno novca i vremena. Možemo osigurati vozačke dozvole za ljude koji znaju voziti, ali nemaju vremena za polaganje ispita. Osiguravamo i osobe koje ne mogu voziti.
Pomoći ćemo vam da položite certifikaciju praktičnog i teorijskog ronjenja u samo nekoliko radnih dana i pomoći ćemo vam da dobijete pravu i registriranu vozačku dozvolu tako da se ne morate brinuti oko pisanja teških ispita i trošenja toliko vremena i novca.
kupiti vozačku dozvolu , kupnja vozacke dozvole u hrvatskoj , kako kupiti vozacku dozvolu u srbiji cena, kako kupiti vozacku dozvolu u srbiji, kupovina vozacke dozvole forum , kupovina vozacke dozvole
Compre uma carta de condução real e registada no nosso sítio Web sem ter de fazer qualquer exame ou prova prática. Só precisamos dos seus dados e a carta será registada no sistema nos oito dias seguintes. A carta de condução deve passar pelo mesmo processo de registo que as cartas emitidas nas escolas de condução.
Comprar carta de condução , comprar carta de condução lisboa , comprar carta de condução urgente , comprar carta de conduçao verdadeira , comprar carta de conduçao , comprar cartas de condução , comprar carta de condução preço , comprar carta de conducao , comprar carta de condução portugal
Acquistare una patente di guida per tutti i Paesi della zona UE
Esame per la patente di guida. L’esame per la patente di guida è sempre un compito molto difficile per la maggior parte delle persone. Ciò è dovuto alla natura tesa dell’esame teorico della patente di guida e dell’esame pratico della patente di guida. Tuttavia, vi forniremo una patente di guida senza che dobbiate sostenere l’esame per la patente. In questo modo, risparmiamo molto denaro e tempo. Perché frequentare una scuola guida costa molto denaro e tempo. Possiamo fornire una patente di guida a chi sa guidare ma non ha il tempo di sostenere un esame. Forniamo anche un’assistenza a chi non sa guidare.
Possiamo aiutarvi a superare sia la certificazione pratica che quella teorica in pochi giorni lavorativi e aiutarvi a ottenere una patente di guida reale e registrata che non vi costringa a stressarvi scrivendo esami difficili e spendendo così tanto tempo e denaro.
Comprare patente , Comprare la patente , Comprare patente online , Comprare patente originale , comprare la patente online , comprare patente b legale , comprare patente b , comprare patente di guida , comprare la patente di guida
Comprare la patente di guida reale e registrata sul nostro sito web senza sostenere alcun esame o prova pratica. Tutto ciò di cui abbiamo bisogno sono i vostri dati e sarà registrato nel sistema entro i prossimi otto giorni. La patente di guida deve essere sottoposta alla stessa procedura di registrazione di quelle rilasciate dalle scuole guida.
Comprare patente , Comprare patente , Comprare la patente , Comprare patente online , Comprare patente originale , comprare la patente online , comprare patente b legale , comprare patente b , comprare patente di guida , comprare la patente di guida
Kjøp førerkort for alle land i EU-sonen
Test av førerkort. Førerkortprøven er alltid en veldig vanskelig oppgave for de fleste. Dette skyldes den anspente naturen til den teoretiske førerkortprøven og den praktiske førerkortprøven. Vi vil imidlertid gi deg førerkort uten at du trenger å ta en førerkortprøve. På denne måten sparer vi mye penger og tid. For det koster mye penger og tid å gå på kjøreskole. Vi kan gi førerkort til folk som kan kjøre, men som ikke har tid til en eksamen. Vi sørger også for folk som ikke kan kjøre.
Vi kan hjelpe deg med å bestå både den praktiske og teoretiske dykkersertifiseringen i løpet av noen få virkedager og hjelpe deg med å få et ekte og registrert førerkort som du ikke trenger å stresse deg med å skrive vanskelige eksamener og bruke så mye tid og penger.
Kjøpe førerkort
Kaufen Sie einen Führerschein für alle Länder der EU-Zone
Führerscheinprüfung. Die Führerscheinprüfung ist für die meisten Menschen immer eine sehr schwierige Aufgabe. Das liegt daran, dass die theoretische Führerscheinprüfung und die praktische Führerscheinprüfung sehr angespannt sind. Wir verschaffen Ihnen jedoch einen Führerschein, ohne dass Sie eine Führerscheinprüfung ablegen müssen. Auf diese Weise sparen wir viel Geld und Zeit. Denn der Besuch einer Fahrschule kostet viel Geld und Zeit. Wir können einen Führerschein für Leute machen, die zwar fahren können, aber keine Zeit für eine Prüfung haben. Wir können auch für Leute sorgen, die nicht fahren können.
Wir können Ihnen helfen, sowohl die praktische als auch die theoretische Prüfung innerhalb weniger Arbeitstage zu bestehen und Ihnen helfen, einen echten und registrierten Führerschein zu bekommen, damit Sie sich nicht mit dem Schreiben schwieriger Prüfungen stressen und so viel Zeit und Geld aufwenden müssen.
Führerschein kaufen , eu führerschein kaufen , registrierten führerschein kaufen , kaufen schweizer führerschein online , führerschein kaufen online , deutschen führerschein kaufen , führerschein kaufen ausland , österreichischen führerschein kaufen , führerschein kaufen legal in deutschland , führerschein kaufen legal, führerschein kaufen eu , legalen führerschein kaufen , deutschen registrierten führerschein kaufen , führerschein kaufen österreich , legal führerschein kaufen
Kaufen Sie auf unserer Website einen echten und registrierten Führerschein, ohne eine Prüfung oder einen praktischen Test ablegen zu müssen. Wir benötigen lediglich Ihre Daten, die innerhalb der nächsten acht Tage im System erfasst werden. Der Führerschein muss dasselbe Registrierungsverfahren durchlaufen wie die von den Fahrschulen ausgestellten Führerscheine.
Führerschein kaufen , eu führerschein kaufen , registrierten führerschein kaufen , kaufen schweizer führerschein online , führerschein kaufen online , deutschen führerschein kaufen , führerschein kaufen ausland , österreichischen führerschein kaufen , führerschein kaufen legal in deutschland , führerschein kaufen legal, führerschein kaufen eu , legalen führerschein kaufen , deutschen registrierten führerschein kaufen , führerschein kaufen österreich , legal führerschein kaufen
Этот информативный текст отличается привлекательным содержанием и актуальными данными. Мы предлагаем читателям взглянуть на привычные вещи под новым углом, предоставляя интересный и доступный материал. Получите удовольствие от чтения и расширьте кругозор!
Получить дополнительную информацию — https://narko-zakodirovat1.ru/
Попытки самостоятельного выхода из запоя, без квалифицированного медицинского вмешательства и должного контроля со стороны специалистов, могут привести к крайне серьезным осложнениям, представляющим прямую угрозу для жизни и здоровья, таким как неконтролируемые скачки артериального давления, судороги, опасные галлюцинации и даже острый алкогольный психоз, требующий немедленной госпитализации в специализированное медицинское учреждение
Получить больше информации — нарколог на дом цены иркутск
Своевременное обращение за профессиональной медицинской помощью помогает эффективно предотвратить дальнейшее ухудшение состояния, развитие серьезных хронических осложнений, таких как поражение печени, сердца, почек и головного мозга, а также минимизировать негативное воздействие алкоголя на психику и эмоциональное состояние пациента, предотвращая развитие депрессии, тревожности и других психических расстройств, связанных с алкогольной зависимостью
Получить дополнительную информацию — нарколог на дом цены в иркутске
Проблемы зависимости – актуальная проблема, разрушающая жизнь. Наш подход – комплексное лечение для успешного результата. Борьба с зависимостью – это долгий путь, требующий медицинской и психологической поддержки. “Перезагрузка” стремится предоставить безопасное пространство, где каждый сможет получить поддержку. Наша цель – не просто избавить от зависимости, а восстановить полноценную жизнь. Комплексная диагностика позволяет создать индивидуальные планы лечения. План лечения включает медикаменты для детоксикации и психотерапию для изменения мышления.
Получить дополнительные сведения — вывод из запоя в краснодаре
Запой – это острое и крайне опасное состояние, характеризующееся полной и неконтролируемой утратой способности регулировать потребление алкоголя, что с высокой вероятностью может привести к серьезным и даже потенциально смертельным последствиям для здоровья, поражая практически все жизненно важные органы и системы организма, от нервной и сердечно-сосудистой до пищеварительной и эндокринной
Подробнее — http://narcolog-na-dom-v-irkutske66.ru
Кроме того, лечение на дому гарантирует полную анонимность и строжайшую конфиденциальность, что особенно важно для тех пациентов, которые по каким-либо причинам не желают разглашать информацию о своей проблеме с алкогольной зависимостью, обеспечивая индивидуальный и деликатный подход к каждому конкретному случаю, учитывая все особенности и потребности пациента
Подробнее — выезд нарколога на дом цена в иркутске
Кроме того, лечение на дому гарантирует полную анонимность и строжайшую конфиденциальность, что особенно важно для тех пациентов, которые по каким-либо причинам не желают разглашать информацию о своей проблеме с алкогольной зависимостью, обеспечивая индивидуальный и деликатный подход к каждому конкретному случаю, учитывая все особенности и потребности пациента
Подробнее тут — нарколог на дом недорого иркутск
служба поддержки мостбет номер телефона https://shorts.borda.ru/?1-18-0-00000397-000-0-0 .
мостбет скачать http://shorts.borda.ru/?1-18-0-00000397-000-0-0/ .
Современная и хорошо оснащенная клиника «Курс на ясность» оказывает экстренную наркологическую помощь с оперативным выездом квалифицированных врачей на дом в режиме 24 часа в сутки 7 дней в неделю, обеспечивая пациентам возможность получить всю необходимую помощь в любое время суток и в комфортной для них домашней обстановке, избежав при этом необходимости госпитализации и связанных с ней неудобств
Изучить вопрос глубже — https://kapelnica-ot-zapoya-ekb55.ru/kapelnicza-ot-zapoya-v-stacionare-ekaterinburg
мостбет авиатор https://tagilshops.forum24.ru/?1-4-0-00000205-000-0-0/ .
скачать mostbet https://tagilshops.forum24.ru/?1-4-0-00000205-000-0-0/ .
Лучшее решение проблемы с просрочками — это процедура банкротства по 127 закону-ФЗ процедура банкротства физического лица отзывы .
Не затягивайте с просрочками по кредитам. У вас есть законное право списать долги, пройдя через процедуру банкротства банкротство физ лиц отзывы .
Без своевременной и адекватной медицинской помощи длительный запой может перерасти в тяжёлую и угрожающую жизни форму алкогольной интоксикации, вызывая каскад серьезных сбоев в работе практически всех систем организма, от сердечно-сосудистой и нервной до пищеварительной и эндокринной, поэтому своевременное обращение к опытным и квалифицированным специалистам даёт реальную возможность предотвратить развитие тяжелых последствий и обеспечить безопасный и эффективный процесс восстановления, начиная с первичной детоксикации и заканчивая долгосрочной реабилитацией.
Подробнее тут — вывод из запоя дешево архангельск
1 win вход https://yamama.forum24.ru/?1-11-0-00000459-000-0-0-1742818616 .
1win. com 1win. com .
1win ваучер https://www.mymoscow.forum24.ru/?1-6-0-00026928-000-0-0 .
1вин вход с компьютера https://mymoscow.forum24.ru/?1-6-0-00026928-000-0-0/ .
скачать mostbet на телефон http://www.corgan.borda.ru/?1-0-0-00000265-000-0-0 .
mostbets http://corgan.borda.ru/?1-0-0-00000265-000-0-0/ .
Алкоголизм, наркомания и игромания – это не просто привычка, а сложное заболевание, требующее помощи. Хроническое употребление веществ приводит к абстинентному синдрому – невыносимой тяге. Прекращение употребления веществ без медицинской поддержки приводит к физическим и психическим страданиям. Абстиненция мешает выздоровлению, негативно влияя на мозг, личность и общение. “Чистое Завтра” предлагает эффективное лечение зависимостей с использованием индивидуального подхода и научно обоснованных методов.
Исследовать вопрос подробнее — вывод из запоя
1 vin zdorovie.forum24.ru/?1-7-0-00000231-000-0-0-1742818050 .
Запой – это очень опасно, нужно срочно вызывать нарколога на дом в Волгограде! Помощь нарколога на дому – это оперативно, удобно и анонимно. Мы быстро очистим ваш организм от алкоголя и восстановим его работу. Наши специалисты готовы приехать к вам в любое время суток. Лечение комплексное: лекарства, индивидуальный подход и психологическая помощь. Первый шаг – детоксикация, мы поможем вам избавиться от алкогольной интоксикации.
Подробнее тут — вывод из запоя в волгограде
1 vin официальный сайт http://zdorovie.forum24.ru/?1-7-0-00000231-000-0-0-1742818050/ .
aviator mostbet https://www.mostbet6004.ru .
служба поддержки мостбет номер телефона https://mostbet6004.ru .
Узнайте мнение тех, кто уже прошел процедуру банкротства и списал свои долги https://bankrotstvo-v-moskve123.ru .
мост бет girikms.forum24.ru/?1-1-0-00000361-000-0-0-1742819287 .
мостбет скачать мостбет скачать .
мостбет казино войти http://www.alfatraders.borda.ru/?1-0-0-00004917-000-0-0-1743053068 .
Специалист уточняет длительность запоя, характер употребляемого алкоголя и наличие сопутствующих заболеваний. Точный сбор данных позволяет оперативно корректировать лечение и выбрать оптимальные методы детоксикации.
Изучить вопрос глубже — http://narco-vivod-clean.ru/
1вин бет официальный сайт https://www.fanfiction.borda.ru/?1-0-0-00029708-000-0-0-1743051664 .
партнёрка 1win https://fanfiction.borda.ru/?1-0-0-00029708-000-0-0-1743051664 .
Запой – это очень опасно! Круглосуточная помощь нарколога в Волгоградской области – ваш шанс выжить. Мы оказываем помощь круглосуточно, чтобы вы могли начать лечение в любой момент. Мы обеспечиваем оперативное вмешательство, индивидуальный подход и высокий уровень безопасности. Служба круглосуточного вывода из запоя работает оперативно и надежно. При ухудшении состояния, мы готовы выехать на дом или принять вас в клинике для детоксикации. Начинаем с диагностики: сбор анамнеза, измерение показателей и оценка степени интоксикации.
Выяснить больше — https://vyvod-iz-zapoya-volgograd000.ru/vyvod-iz-zapoya-na-domu-volgograd
Не затягивайте с просрочками по кредитам. У вас есть законное право списать долги, пройдя через процедуру банкротства https://bankrotstvo-v-moskve95.ru .
Длительный запой – это опасное состояние, при котором организм не успевает вывести токсины алкоголя, что приводит к серьезной интоксикации и нарушению работы жизненно важных органов. Без своевременного вмешательства риск развития осложнений существенно возрастает. Наркологическая клиника «Доктор Трезвость» в Сочи предлагает комплексную поддержку и профессиональное лечение запоя, используя передовые методы терапии и индивидуальный подход для скорейшего восстановления здоровья пациента.
Подробнее — http://vyvod-iz-zapoya-sochi777.ru/
банкротство отзывы
отзывы о банкротстве отзывы о банкротстве .
Капельница от запоя рекомендуется врачами-наркологами в тех случаях, когда организм уже не может самостоятельно справляться с последствиями алкогольной интоксикации. Особенно важно оперативно обратиться за помощью, если отмечаются следующие симптомы:
Получить дополнительную информацию — капельница от запоя наркология краснодар
«Честный врач» – это наркологическая клиника в Нижнем Новгороде, где каждому пациенту предлагают индивидуальное лечение зависимости. Наши программы включают эффективное очищение организма, кодирование и полную реабилитацию, а также круглосуточный выезд специалиста. Обеспечиваем конфиденциальность и современные методы для быстрого восстановления контроля над жизнью.
Получить дополнительную информацию — профилактика токсикомании
Одним из основных этапов вывода из запоя является медикаментозная детоксикация. Современные препараты вводятся капельничным методом, что обеспечивает быстрое снижение уровня алкоголя и токсинов в крови. Это позволяет восстановить нормальный обмен веществ и нормализовать работу жизненно важных органов, таких как печень, почки и сердце. Такой подход помогает не только стабилизировать состояние пациента, но и уменьшить риск развития осложнений.
Получить дополнительные сведения — http://vyvod-iz-zapoya-yaroslavl0.ru
Передовые методики
Изучить вопрос глубже — snyatie lomki na domu krasnodar
Клиника «Здравица» в Ростове-на-Дону предлагает современный комплексный подход к лечению абстинентного синдрома. Наши пациенты получают помощь от высококвалифицированных специалистов, которые используют передовые методики и индивидуально подбирают программу лечения для каждого. Среди ключевых преимуществ клиники «Здравица» можно выделить:
Изучить вопрос глубже — http://snyatie-lomki-rnd77.ru/
Специалист уточняет продолжительность запоя, тип употребляемого алкоголя и наличие сопутствующих заболеваний. Такой подробный анализ позволяет подобрать оптимальные методы детоксикации и снизить риск осложнений.
Подробнее тут — postavit-kapelniczu-ot-zapoya lugansk
Обращение за срочной помощью нарколога на дому в Мариуполе имеет ряд весомых преимуществ, которые способствуют быстрому восстановлению здоровья:
Углубиться в тему — vrach-narkolog-na-dom mariupol’
Процесс лечения строится из нескольких ключевых этапов, каждый из которых направлен на оперативное восстановление состояния пациента:
Углубиться в тему — наркология вывод из запоя в донецке
При поступлении вызова специалисты клиники «СтопТокс» оперативно выезжают на дом в Екатеринбурге или по всей Свердловской области. По прибытии врач проводит всестороннюю диагностику, включая измерение артериального давления, пульса и уровня кислорода в крови, а также собирает анамнез и оценивает степень интоксикации. На основе полученной информации составляется индивидуальный план лечения, который включает следующие этапы:
Детальнее — нарколог на дом екатеринбург.
Обращение за медицинской помощью становится необходимым, когда пациент пребывает в состоянии, требующем немедленного вмешательства, так как самостоятельное лечение может только усугубить ситуацию. Это происходит, если запой продолжается несколько дней, и организм не успевает справляться с накопившимися токсинами, что ведёт к нарушению работы внутренних органов. Если у пациента регулярно наблюдаются симптомы, такие как частая рвота, сильное головокружение, спутанность сознания, судороги или резкие колебания артериального давления, это является явным сигналом к вызову специалиста. Особенно важно обращаться за помощью при выраженных признаках абстинентного синдрома, когда сильная дрожь, панические атаки, бессонница, тревожность и даже галлюцинации свидетельствуют о том, что организм испытывает критическую нехватку поддержки. Наличие психических нарушений, таких как агрессивное поведение, спутанность сознания или признаки алкогольного психоза, также требует незамедлительного вмешательства. В таких ситуациях обращение за профессиональной помощью помогает быстро стабилизировать состояние пациента, предотвратить развитие тяжелых осложнений и сохранить жизнь.
Подробнее тут — https://narcolog-na-dom-ekaterinburg00.ru/narkolog-na-dom-czena-ekb
Наркологическое лечение на дому начинается с приезда врача в течение 30-60 минут после вызова. Специалист проводит первичную диагностику состояния пациента, включая измерение артериального давления, пульса и уровня кислорода в крови, а также общую оценку тяжести интоксикации. Затем врач подбирает оптимальный состав лекарств для детоксикационной капельницы, которая эффективно очищает организм от токсинов, восстанавливает водно-солевой баланс и нормализует работу внутренних органов.
Подробнее тут — нарколог на дом вывод из запоя сочи
Преимущество
Выяснить больше — narkolog-na-dom ekaterinburg
На данном этапе врач уточняет длительность запоя, тип употребляемого алкоголя и наличие сопутствующих заболеваний. Тщательный анализ этих данных позволяет подобрать оптимальные методы детоксикации и снизить риск осложнений.
Получить дополнительные сведения — вывод из запоя на дому мурманск.
Когда алкогольный запой угрожает здоровью, оперативное и квалифицированное вмешательство становится жизненно необходимым. В Улан-Удэ специалисты по наркологии оказывают помощь на дому, обеспечивая скорейшую детоксикацию организма, восстановление обменных процессов и стабилизацию работы внутренних органов. Такой подход позволяет пациенту получить комплексное лечение в комфортной домашней обстановке с полным соблюдением конфиденциальности.
Выяснить больше — вывод из запоя капельница в улан-удэ
В условиях Донецка ДНР профессиональный вывод из запоя на дому организован по отлаженной схеме, которая включает несколько последовательных этапов. Такой комплексный подход позволяет не только быстро вывести токсичные вещества из организма, но и обеспечить стабильное восстановление всех систем организма.
Исследовать вопрос подробнее — вывод из запоя
На данном этапе врач уточняет длительность запоя, тип употребляемого алкоголя и наличие сопутствующих заболеваний. Тщательный анализ этих данных позволяет подобрать оптимальные методы детоксикации и снизить риск осложнений.
Углубиться в тему — срочный вывод из запоя мурманск
В Москве наркологическая клиника «Формула Трезвости» оказывает квалифицированную помощь в борьбе с зависимостями: современная детоксикация, стационарное и амбулаторное лечение, а также профессиональная психотерапевтическая поддержка. Специалисты клиники эффективно помогут преодолеть зависимость и восстановить здоровье.
Получить больше информации — кодирование от алкоголизма по методу довженко
mostbet скачать http://mostbet7001.ru .
1 win md http://www.1win707.ru .
где вводить промокод в 1win где вводить промокод в 1win .
маркетплейс аккаунтов продажа аккаунтов соцсетей
магазин аккаунтов социальных сетей продать аккаунт
Account Selling Platform Website for Buying Accounts
Secure Account Sales Secure Account Purchasing Platform
Website for Selling Accounts Buy Pre-made Account
Account Catalog Guaranteed Accounts
Account Selling Service Website for Selling Accounts
best canadian pharcharmy online
purchase ready-made accounts accounts market
продамус промокод скидка продамус промокод скидка .
https://t.me/Official_1win_1win/1391
accounts market accounts market
online account store ready-made accounts for sale
buy accounts accounts for sale
website for selling accounts social media account marketplace
buy pre-made account buy account
account exchange secure account purchasing platform
account buying service account market
account exchange service account buying service
sell accounts account store
account marketplace account market
online account store guaranteed accounts
Зарабатывай реальные деньги в лучших казино! Обзоры слотов, акции, стратегии для победы! Подписывайся
Казино онлайн: секреты, тактики, промокоды! Заработай с нами! Только честные обзоры.
https://t.me/s/official_izzi/513
guaranteed accounts https://accounts-offer.org
account trading platform https://accounts-marketplace.xyz
Окунитесь в мир азарта с 7k casino! Вас ждут захватывающие игры, выгодные бонусы и возможность сорвать куш! Попробуйте свои силы прямо сейчас!
https://7k-off.online
account purchase https://social-accounts-marketplaces.live/
account trading platform buy accounts
account selling platform https://buy-accounts.space
account purchase https://buy-accounts.live
social media account marketplace buy accounts
1 win casino https://1win1017.top .
account store accounts marketplace
account buying service https://social-accounts-marketplace.live/
https://t.me/s/saratings
account market https://accounts-marketplace-best.pro/
маркетплейс аккаунтов https://akkaunty-na-prodazhu.pro
продажа аккаунтов https://kupit-akkaunt.xyz/
МостБет промокод 2025 — способ получить бонус. Введите код при создании аккаунта и получите вознаграждение до https://roselectronika.ru/news/pages/?mostbet_promokod_pri_registracii_1.html сотни процентов. Действуйте прямо сейчас и погрузитесь в игру с МостБет уже в 2025 году!
Промокод на MostBet — возможность получить щедрый бонус. Введите уникальный код при создании профиля и пользуйтесь увеличенным депозитом. МостБет предлагает https://monument-nn.ru/wp-includes/list/mostbet_promokod_pri_registracii_1.html щедрые акции для новых игроков.
продамус промокоды продамус промокоды .
продажа аккаунтов akkaunt-magazin.online
маркетплейс аккаунтов https://akkaunty-market.live
Ищете выгодный старт в ставках? Промокод Бетвинер откроет вам доступ к щедрому приветственному бонусу. Бетвинер Промокод https://buxexpert.ru/old/pgs/betwinner_promokod_bonus_do_25000_rub.html Просто зарегистрируйтесь, введите код бонуса и начните выигрывать уже сегодня. Испытайте фортуну вместе с Betwinner!
магазин аккаунтов https://kupit-akkaunt.online
шкаф на паркинг уфа шкаф на паркинг уфа .
bookmarked!!, I like your web site!
?Quieres empezar a apostar con ventaja? Usa el Codigo de Bono para 1xBet y consigue increibles bonificaciones. Los nuevos usuarios pueden beneficiarse de creditos adicionales para aumentar sus posibilidades de ganar. Solo tienes que crear una cuenta, introducir el codigo y empezar a explorar cientos de apuestas en vivo. ?No dejes pasar esta oportunidad de apostar con mejores premios!
https://redclusters.com/codigo-promocional-1xbet-usa-para-obtener-bono-e130/ Los mejores codigos promocionales de 1X Bet
Если вы хотите начать делать ставки с бонусом, используйте специальный код при регистрации в Пари. Новый клиент может применить код при открытии профиля, чтобы получить дополнительные средства. Это отличная перспектива начать игру с дополнительным балансом. Не забудьте проверить требования к бонусу перед активацией. С промокодом Пари 2025 вы получаете больше с первого дня!
https://lanvitravel.ru/forums/topic/bk-pari-pari-ru-promokod-bonus-15000-rublej Промокод На Пари Букмекер
buy facebook ad account https://buy-adsaccounts.work
Join online casino games and dive into a world of thrill. Pick among hundreds of games like progressive jackpots, card classics, and interactive games. With easy sign-up and safe deposits, online gaming is hassle-free. Log in to get lucky and relish non-stop casino fun.
https://twitemedia.com/read-blog/365 Virtual casino games
buy fb account facebook ad account buy
facebook account sale https://buy-ads-account.work
Эротический чат с парами — это онлайн-пространство для тех, кто жаждет новых ощущений. Здесь вы можете общаться с настоящими влюблёнными, которые показывают страсть. Приватный видеочат с парами — безопасный способ получить удовольствие без ограничений. Заходите и получайте кайф в любое время!
https://rt.bonachat.ru онлайн порно чат пары
facebook ad account buy https://buy-ad-account.click
Секс онлайн чат — это идеальное место для взрослого общения. Здесь вы можете найти партнёра, которые готовы к интимному диалогу. Онлайн секс-чат предлагает полную приватность и живое общение 18+. Начинайте беседу и отдайтесь страсти без лишних ожиданий.
https://livechat18.ru/ бонгакамс пара
Uncover the world of perks with the limited 1XBET Free Spin Promo Code! This valuable deal lets players claim no-cost spins on trending slot games. Just sign up at 1XBET, enter the promo code, and dive into the game today. Play without a deposit — it’s the perfect way to experience the thrill. Don’t wait — use your 1XBET Free Spin Promo Code now!
https://seo.gamerlaunch.com/users/blog/6204799/2366130/code-promo-pour-1xbet—bonus-de-bienvenue-jusqua/?gid=589440 1XBET Promo Code 2025
buy facebook old accounts https://buy-accounts.click
Unlock your winning potential with 1XBET Betting Codes! These limited-time codes unlock extra funds for sports betting. Just enter the promo code during sign-up or before placing your initial bet. With 1XBET Betting Codes, you can enhance your bankroll and expand your chances of winning. Whether you’re a beginner user or a loyal player, these codes open doors to the top betting experiences. Don’t delay — try them now!
https://onlinegameblog.designi1.com/54806135/1xbet-promo-code-sri-lanka 1XBET Latest Promo Code
Запусти игру с выгодой, используя Промокод Melbet При Регистрации! Этот эксклюзивный код открывает доступ к бонусам сразу после регистрации. Просто вставь промокод в нужное поле при оформлении аккаунта, и получи бонусные рубли на свой баланс. С Промокодом Melbet При Регистрации ты играешь с бонусом с первого дня. Не упусти шанс — активируй код и испытай удачу прямо сейчас!
https://salda.ws/f/topic.php?f=15&t=88243 Промокод На Бесплатную Ставку Melbet
buy google ads verified account buy google ads accounts
buy verified google ads account https://buy-ads-agency-account.top
masbet masbet .
adwords account for sale https://sell-ads-account.click
Looking for 1XBET Best Promo Codes? Don’t miss the opportunity to start with extra cash. Just apply the code when registering and enjoy exclusive rewards. 1XBET often releases new codes, so check often. These offers are perfect for beginners who want to start strong.
http://kanon.kabb.ru/viewtopic.php?t=5130 1x Bet Bonus Use
Под веками у него вспыхнул зеленый огонь, от него загорелся мозг, и над толпою полетели хриплые арамейские слова: – Четверо преступников, арестованных в Ершалаиме за убийства, подстрекательства к мятежу и оскорбление законов и веры, приговорены к позорной казни – повешению на столбах! И эта казнь сейчас совершится на Лысой Горе! Имена преступников – Дисмас, Гестас, Вар-равван и Га-Ноцри. центр переводов Вот и лес отвалился, остался где-то сзади, и река ушла куда-то в сторону, навстречу грузовику сыпалась разная разность: какие-то заборы с караульными будками и штабеля дров, высоченные столбы и какие-то мачты, а на мачтах нанизанные катушки, груды щебня, земля, исполосованная каналами, – словом, чувствовалось, что вот-вот она, Москва, тут же, вон за поворотом, и сейчас навалится и охватит.
– Ну, хотя бы жизнью твоею, – ответил прокуратор, – ею клясться самое время, так как она висит на волоске, знай это! – Не думаешь ли ты, что ты ее подвесил, игемон? – спросил арестант. нотариальный перевод метро аэропорт – Ты, Иван, – говорил Берлиоз, – очень хорошо и сатирически изобразил, например, рождение Иисуса, сына Божия, но соль-то в том, что еще до Иисуса родился целый ряд сынов Божиих, как, скажем, финикийский Адонис, фригийский Аттис, персидский Митра.
buy google adwords account google ads agency account buy
Незнакомец немедленно вытащил из кармана портсигар и предложил его Бездомному: – «Наша марка». самому продвинуть свой сайт Про супругу Берлиоза рассказывали, что будто бы ее видели в Харькове с каким-то балетмейстером, а супруга Степы якобы обнаружилась на Божедомке, где, как болтали, директор Варьете, используя свои бесчисленные знакомства, ухитрился добыть ей комнату, но с одним условием, чтобы духу ее не было на Садовой улице… Итак, Степа застонал.
Иван так и сделал и углубился в таинственную сеть арбатских переулков и начал пробираться под стенками, пугливо косясь, ежеминутно оглядываясь, по временам прячась в подъездах и избегая перекрестков со светофорами, шикарных дверей посольских особняков. стоимость создания сайта на wordpress Покрытые испариной лица как будто засветились, показалось, что ожили на потолке нарисованные лошади, в лампах как будто прибавили свету, и вдруг, как бы сорвавшись с цепи, заплясали оба зала, а за ними заплясала и веранда.
fb bussiness manager https://buy-business-manager-acc.org/
buy facebook business managers https://buy-verified-business-manager-account.org
facebook business manager for sale buy-verified-business-manager.org
facebook bm buy https://business-manager-for-sale.org/
buy business manager facebook https://buy-business-manager-verified.org/
buy verified bm facebook buy-bm.org
verified facebook business manager for sale https://verified-business-manager-for-sale.org
tiktok ads account buy https://buy-tiktok-ads-account.org
Эта статья предлагает живое освещение актуальной темы с множеством интересных фактов. Мы рассмотрим ключевые моменты, которые делают данную тему важной и актуальной. Подготовьтесь к насыщенному путешествию по неизвестным аспектам и узнайте больше о значимых событиях.
Получить больше информации — https://medalkoblog.ru/
Looking to enhance your betting experience? Use a 1XBET Promo Code Bonus and get extra funds on your first deposit. It’s a great way for beginners to start their path in the sportsbook market. With this incentive, you’ll get more chances to place successful bets. Simply enter the coupon at registration and redeem your bonus today. 1XBET makes it convenient to win more.
https://bookmarkbells.com/story19624707/1xbet-promo-code-today-sri-lanka 1XBET Latest Promo Code
окна rehau москва https://02stroika.ru/ .
buy tiktok business account https://buy-tiktok-ads-accounts.org
Grab a limited 1XBET Free Promo Code and unlock amazing bonuses on your first deposit. Whether you’re new to betting, this code lets you try 1XBET with bonus funds. Apply the code during registration and watch your balance grow instantly. It’s a risk-free way to enjoy sports betting or casino games. Take benefit of this promo while it lasts!
https://www.gabitos.com/eldespertarsai/template.php?nm=1747813598 1XBET Casino Promo Code
tiktok ad accounts https://buy-tiktok-business-account.org
Русалки ждали в чане, периодически погружаясь в воду и снова облокачиваясь на край. Рядом возник Ждан: – Ты зачем? Это оружие, негоже тупить. – Вам неинтересно? – Противным голосом спросила училка.
После посещения дворца, в котором уже пылали светильники и факелы, в котором шла праздничная суета, молодой человек пошел еще бодрее, еще радостнее и заспешил обратно в Нижний Город. Гость провел в казармах немного времени, не более десяти минут, но по прошествии этих десяти минут со двора казарм выехали три повозки, нагруженные шанцевым инструментом и бочкой с водою. Я перенесу, – и щёлкнул пальцами.
Трубы теперь доносились до Маргариты издалека. Пошли, быстро! Они двигались по зигзагам, обозначенным белыми камнями небольшого размера. Ошалевшая девчонка прошептала совершенно неожиданные в устах «ботаника» слова: – Обалдеть! Слав, я валяюсь, они натуральные колдуны, круче всяких Потных Гариков! Дамблдор отдыхает! Мы в прошлое угодили, точно, ты понимаешь! И фиг мы отсюда выберемся… А потом разрыдалась.
Левий, осмыслив сказанное, утих, но заявил, что он никуда не уйдет и желает участвовать в погребении. Только к вечеру пожар унялся, истребив деревья на этом участке леса. Перечтите еще раз хотя бы историю знаменитого калифа Гарун-аль-Рашида.
– Врешь, барин, – прокричал он Николаю. Они спорили о чем-то очень сложном и важном, причем ни один из них не мог победить другого. Из-под пальцев волхва тянулся разбавленный кровавый потёк.
Из кулис тут вышел артист в смокинге, гладко выбритый и причесанный на пробор, молодой и с очень приятными чертами лица. Кстати, мне нужно с тобой поговорить. Маргарита откинула шторку и влетела в окно.
Нож, сделанный отцом Миланы, выглядел очень внушительно. В ушах заломило, но не вырываться же для их продувки? Вот и каменистое дно, где поблескивают редкие монетки и что-то ещё, непонятное, словно глиняные статуэтки. Маргарита сразу узнала его, простонала, всплеснула руками и подбежала к нему.
Славка дополнил: – Пап, надо бы разобраться, что происходит. Именно так и сказал бы он в данном случае. Молчала и Алёна Быстрова – наверное, все слёзы вытекли за первый, самый страшный день.
— Не шалю, никого не трогаю, починяю примус, — недружелюбно насупившись, проговорил кот, — и еще считаю долгом предупредить, что кот древнее и неприкосновенное животное. Добрые люди бросались на него, как собаки на медведя. И все вместе отправилась на длинную береговую косу, где ровной щеткой торчала недавняя отава.
1win sayti http://www.1win14003.ru .
Те в ответ принялись высмеивать привидения за тупость и однообразные приёмы. – Включу – и сразу бежим. Полчаса тому назад, сударь вы мой, вы бы увидали меня в совершенно другой позиции.
Она приходила ко мне каждый день, а ждать ее я начинал с утра. — До старости? — Да, до старости. » Отравленный взрывом неврастении, поэт покачнулся, пол под ним перестал трястись.
— Евгений Васильевич, извините меня, но я позвала вас сюда не с тем, чтобы рассуждать об учебниках. Лёгкое облачко взвилось, прянуло ей в лицо. Кто-то из девушек поманил Милану, потеснил парней и усадил рыжую на бревно.
— Вы очень скромны… Но мне хотелось бы узнать что-нибудь о вас, о вашем семействе, о вашем отце, для которого вы нас покидаете. Парень с мальчишкой остались одни. Его длинная широкая шпага была воткнута между двумя рассекшимися плитами террасы вертикально, так что получились солнечные часы.
Секции из металлического штакетника — это долговечное решение для загородного участка. Металлический штакетник устойчив к коррозии и не боится влаги и солнца. Такие ограждения гармонируют с природой и обеспечивают вентиляцию участка. Монтаж возможна своими руками.
https://www.kroi.ru/articles/27/1287/ Заборы из металлического штакетника
сервис обмена валют
Unlock exclusive rewards with the valid 1Win Promo Code! Whether you’re a beginner player or a regular user, this code gives you a huge boost on your first deposit. Simply enter the promo code during registration and enjoy welcome bonuses instantly. Don’t miss your moment to increase your winnings with this hot deal. The 1Win Promo Code is your gateway to better odds and more fun. Start exploring today and feel the thrill of 1Win!
https://everest.ro/wp-content/pages/1win_promo_code_bonus_up_to_500.html Promo Code For 1Win 2025
Looking to boost your gaming experience? Use the Melbet Casino Promo Code for an fast reward! This special code gives first-time players a generous welcome bonus. Simply apply the code during sign-up and get access to extra spins. Whether you love slots, this promo code is your gateway to more fun and bigger wins. Don’t miss this limited-time offer — activate your Melbet Casino Promo Code today and start exploring in style!
https://holidays2malaga.com/wp-content/pgs/?melbet_promo_codes_3.html Melbet Promo Code Bonus
Claim your instant reward today with the 1xslot No Deposit Bonus Code! This limited-time offer lets you start playing without spending a dime. Simply sign up, enter the code, and enjoy free credits to explore slots. It’s the perfect way for new players to test the platform risk-free. Don’t miss this opportunity to win real money with zero investment. Use the 1xslot No Deposit Bonus Code now and start your journey with confidence!
https://hoasenlk.com/pages/1xslots_promo_code_bonus_up_to_2150.html 1xSlots Promo Code
Мечтаете начать с преимуществом? Промокод 1Win создан именно для этого. При создании аккаунта просто укажите значение купона, и ваш баланс получит надбавку. Заберите бонус прямо сейчас и играйте с выгодой!
Бонус-код 1Win — отличная возможность начать с бонусом. Просто активируйте купон при заполнении формы, и заберите фрибет на игру. Никаких сложностей — платформа поощряет новичков!
Специальный купон 1Win — верный путь стартовать с прибылью. Активируйте купон при создании аккаунта и забирайте фрибет без лишних условий. Просто, выгодно, готово для новых игроков!
https://bezprovodoff.com/pgs/?1win_promokod_pri_registracii_bonus_do_200_000_rub.html Промокод при регистрации 1Win
Когда он наконец увидал пылящую вдали длинную процессию, она была уже у подножия холма. Серпухов Перевод Документов С Нотариальным Заверением В зале перестали дышать.
– Как это странно, точно во сне было. Срочно Нотариальный Перевод Паспорта Он быстро расправился с рыбой, потом вытащил книгу, лист осиной бумаги – углубился в расчеты.
Одинцова все это знала. Нотариальный Перевод Документов Сзао Как можно эти грубые подделки принять за причиндалы современного компа? Они вовсе не походили на настоящие! Но ведь сначала казались! Почему? – …я хотела причесаться, пошла, а оно всё зыбкое, как вода, колышется.
бетонирование заезда на участок бетонирование заезда на участок .
Вторая, под которую так лихо заскочил Славка, полоскалась снаружи. В Уфе Секс Для Знакомства — Прокуратор, как всегда, тонко понимает вопрос! — Но, во всяком случае, — озабоченно заметил прокуратор, и тонкий, длинный палец с черным камнем перстня поднялся вверх, — надо будет… — О, прокуратор может быть уверен в том, что, пока я в Иудее, Вар не сделает ни шагу без того, чтобы за ним не шли по пятам.
Поэт не глядел уже по сторонам, а, уставившись в грязный трясущийся пол, стал что-то бормотать, ныть, глодая самого себя. Займ Денег От Частных Лиц Срочно Кованый золотой саркофаг, обвязанный канатами, лежал на прочном основании из брусьев.
Звуки фортепьяно долетели до них из гостиной. Бесплатный Секс Знакомства Минск Два конца шнура вручает Славке: – Как споткнется, дергай за этот.
Hi! I know this is sort of off-topic but I had to ask. Does operating
a well-established blog such as yours require a massive amount work?
I’m completely new to running a blog but I do write in my
diary everyday. I’d like to start a blog so I can share my own experience and feelings online.
Please let me know if you have any kind of ideas or tips for brand new aspiring bloggers.
Appreciate it!
WOW just what I was searching for. Came here by searching for https://gamebai88.it.com/
A betting bonus is a great start for new bettors. After registration, you may receive bonus cash to play with. Bookmakers use these offers to welcome new players. Always check the terms to maximize your benefit. Bet smarter with a smart promo! https://gaitedhorsemarketplace.com/pages/kak_obnovity_interyer_pri_pomoschi_dekora_sten_sveghiy_vzglyad_na_privychnoe.html Betting bonus
Start your journey with a sportsbook welcome offer. Most top betting platforms offer free bets for new users. Just create a profile, and the bonus will be credited. These deals are ideal for exploring sports betting without big risks. Don’t forget to check the conditions to make the most of your bonus. https://mairie-salaunes.fr/media/pgs/?umnyy_vybor_napolynogo_pokrytiya_dolgovechnosty_i_praktichnosty.html No deposit betting bonus
Looking for a bookmaker promo code? You’re in the right place! Use a unique coupon to get a welcome reward. Just sign up, enter the code, and enjoy your bonus. This offer is perfect for new players and guarantees a strong start with your favorite betting site. https://winmin.in/art/klyuchi_zaperty_v_mashine_chto_delaty.html Free bets for new customers
Claim your first-time bonus now! When you create an account, you’ll receive a bonus offer as a warm welcome. Most betting platforms provide attractive welcome packages to get started. Read the terms to make the most of your bonus. https://eola-style.com/files/pags/za_kulisami_storoghevoy_bashni_1.html Betting cashback bonus
Want a no deposit betting bonus? This deal allows you to start betting without adding funds. Just create an account, and the credit will be available instantly. Ideal for new players, these bonuses come with minimal requirements. It’s risk-free and smart for beginners. https://zamilco.com/wp-includes/pages/?ideologicheskaya_kampaniya_po_zamene_rukovodstva_pechatnyh_izdaniy.html Sportsbook registration bonus
A new user reward is waiting for you! Simply create an account and receive bonus funds. These offers can boost your first bets. Whether it’s a free bet, it’s a great way to explore betting platforms. Be sure to activate the bonus! https://accidentandwellnesscarecenter.com/pags/elektronnye_kursy_podgotovki.html Betting promo code
A betting sign up bonus is waiting for you! Simply sign up and receive bonus funds. These offers can boost your first bets. Whether it’s a match bonus, it’s a smart way to explore betting platforms. Be sure to activate the bonus! https://kmb24.pl/content/pag/vidy_sypi_u_detey.html Free bets for new customers
забор из профлиста под ключ забор из профлиста под ключ .
Looking to sign up for 1XBET? Use a 1XBET Promo Code For Registration and instantly get rewarded! This registration code gives fresh users a head start. Just enter the promo code when creating your account and enjoy the bonus to start betting. No hassle, no fees! https://benficafansclub.com/read-blog/16906_1xbet-promo-code-for-free-bet-bonus-up-to-130.html 1x Bet Free Promo Code
организация въезда на участок http://proezd-k-uchastku-1122.ru .
Новата колекция дамски комплекти съчетава стил, комфорт и женственост
дамски сетове https://komplekti-za-jheni.com .
Деревянные дома, в которых хочется жить: проектирование и строительство
дома деревянные под ключ дома деревянные под ключ .
Комплексное обслуживание зданий: клининг, дезинфекция, обслуживание
заказать клининг в москве https://www.kliningovaya-kompaniya0.ru .
Магазин шин с акциями, скидками и предложениями от ведущих брендов
магазин шин и дисков https://kupit-shiny0-spb.ru/ .
авито труба под заезд на участок http://www.vezd-na-dachnyj-uchastok-1122.ru .
Полный рацион с кормом Jarvi без лишних компонентов
корм для кошек ярви отзывы корм для кошек ярви отзывы .
Использовать бонус-код 1win — быстрый метод начать с увеличенным балансом. Просто создайте аккаунт и введите специальный код при первом пополнении. 1win начислит до 500% бонуса! Не упустите возможность увеличить шансы на выигрыш с использованием промокода от 1win. http://dycom.co.kr/bbs/board.php?bo_table=qa&wr_id=9245 1win промокод
Вы ещё не активировали свой промокод мостбет? Самое время это исправить! Введите уникальный код при регистрации и получите подарочные деньги на счёт. С мостбет промокодом вы начинаете с преимуществом. Это удобно и выгодно — особенно для новичков. http://dycom.co.kr/bbs/board.php?bo_table=qa&wr_id=9246 Мостбет промокод
Гагры круглый год: отдых в любое время и по любому бюджету
отдых гагры http://otdyh-gagry.ru/ .
With spot betting, sports fans can predict what will happen within segments of a live game. This can include wagering on upcoming events, penalties, or individual performance. It’s a strategic and fun way to stay involved in the match, especially for those who enjoy fast judgment calls and real-time odds. https://doomelang.com/SeoPostingGooD spot betting vs fixed odds
Планируете отпуск в Турции? Прокат авто — удобный способ исследовать страну без ограничений. Вместо поездок с экскурсиями, вы управляете маршрутом. https://63game.top/thread-889545-1-1.html Аренда авто анталия аэропорт
ToolkitRC — це інноваційний зарядник, який включає функціональність та компактність. Він підтримує багато форматів батарей, має широкий екран і гнучке меню. Ідеально підходить для моделістів та тих, хто цінує технології. http://xn--ob0by9g87istf7zb79o.com/bbs/board.php?bo_table=free&wr_id=512007 Зарядний ToolkitRC
Как работает услуга «нарколог на дом» и почему ее выбирают тысячи пациентов
наркологи на дом clinic-narkolog24.ru .
Доставка алкоголя на праздник — быстро, удобно и без головной боли
заказать алкоголь в москве алкоголь доставка москва дешево .
Арендовать машину на сутки — просто и удобно. Доступ к выбору подходящий автомобиль под свои нужды. Любая цель — не проблема. Компания предоставляет гибкие условия, простую регистрацию и техподдержку. Комфорт и свобода передвижения — к вашим услугам. https://belconsole.ru/club/forum/messages/forum2/topic1219/message15692/?result=new#message15692 Что нужно для аренды авто в Таиланде
Сучасні електрообігрівачі для обігріву — це ефективне рішення для створення тепла без трубопроводів. Завдяки регулятору температури, пристрій підтримує комфорт. Тонкий дизайн дозволяє встановлювати радіатор у будь-якій кімнаті.Тиха робота — ще один плюс. Оберіть сучасний обігрівач — і забудьте про холод! https://www.fortressrisk.com/user/spencerexogyspencerexogy/ Батарея електрична
zaezd-pod-klyuch-1122.ru .
Коллекции 2025 года: что нового предлагает императорский фарфор
ломоносовский фарфор купить http://www.imperatorskiy-farfor.kesug.com/ .
Практичний налобний ліхтар — ідеальне доповнення для тих, хто працює у темряві. Завдяки сфокусованому освітленню, ви зможете рухатися навіть у ночі. Регульоване кріплення забезпечує комфорт при фізичній активності. Ліхтар працює на акумуляторах, має довгий час роботи. Ідеально підходить для велоїзди, коли освітлення — головне. https://elovebook.com/read-blog/49679_kupiti-nalobnij-fonarik.html Який налобний ліхтар купити
?? У кого в дипломе хоть раз была правда?
Серьезно: вы когда-нибудь смотрели свой диплом и думали — «да, всё, что здесь написано, я действительно знаю и умею»?
У многих — только сертификат. Корочка, глянцевая, с гербом и подписями, которую HR смотрит за 1,5 секунды. А потом спрашивают: опыт, кейсы, компетенции, «что умеешь по факту?». Диплом где-то там, в глубокой папке.
Но реалия в том, что без диплома тебе даже не дадут шанс доказать, что ты умеешь.
Ты можешь быть крутым специалистом, уметь в IT, дизайн, управление, логистику — но без документа с золотым тиснением не попадешь на собеседование.
?? Нормально ли это? Нет. Реальность ли это? Да.
Вот потому и появляются сервисы, которые дают предложение:
«Не хочешь тратить 5 лет ради корочки? Мы поможем. Тебе нужен не вуз — тебе нужен диплом.»
Ты его получаешь, кладёшь в резюме, и дальше всё зависит от твоих мозгов, а не от шрифта на бумаге.
Кто-то скажет: «Это обман!»
А кто-то — «Это адаптация к системе, которая обманывает тебя с детства».
?? И что в итоге?
Диплом становится не подтверждением знаний, а входным билетом. Как QR-код в метро — проверили, что есть, и пропустили.
Поэтому люди и покупают.
Не потому что глупые. А потому что взрослые, занятые, уставшие от лишнего.
Потому что хотят не учиться «ради процесса», а работать по делу.
?? Ирония в том, что большинство таких дипломов — работают.
Даже если ты их не учил — ты знаешь, как применить. А вот «настоящие выпускники» потом всё равно идут на курсы и стажировки, потому что ничего не помнят.
И что важнее: корочка или то, как ты справляешься с задачей?
?? У кого были такие мысли — пишите. У кого был опыт — делитесь.
Можно ли купить диплом для трудоустройства за границей? Смотреть тут
drenazh-pod-klyuch-812.ru .
Лизинг автомобилей для бизнеса: от легких фургонов до тяжелой техники
сельхозтехника лизинг lizing-auto-top1.ru/lizing-selskohozyajstvennoj-tehniki .
Что лучше выбрать при заказе диплома — университет или техникум, чтобы меньше вопросов? Купить диплом института
В 2025 году наличие диплома всё ещё остаётся основным фактором при приёме на работу, повышении по карьерной лестнице или получении лицензии. И если у вас нет необходимого документа — это не повод терять годы.
? Выход есть — покупка диплома, полностью соответствующего оригиналу:
С печатями, подписями, голограммами,
Внесение в архив (по запросу),
Любой ВУЗ, колледж — по всей России и СНГ.
?? Для кого подойдёт?
Вас выгнали, но обучение практически завершено?
Нашли перспективную работу, но нет диплома?
Нужен диплом для лицензирования, повышения, тендера?
Мы работаем без предоплаты (по договору или поэтапно) и гарантируем полную конфиденциальность. У нас нет шаблонов — каждый документ готовится индивидуально, с учётом всех нюансов.
?? Что вы получаете:
Реалистичный диплом, неотличимый от оригинала
Настоящие данные выпускника (по вашей анкете)
Быстрая доставка по России и СНГ
Юридически грамотно оформленный договор (по желанию)
Мы сотрудничаем с квалифицированными специалистами, которые знают, как должен выглядеть официальный документ — вплоть до мельчайших деталей. У нас много лет опыта и более 2362 довольных клиентов.
дренаж цена спб .
A Linebet promo code can be your key to unlocking extra value right from the start. Whether you’re a fan of slot games, Linebet covers all your needs with competitive odds and hundreds of betting options. Entering a promo code during the registration process gives you access to a first deposit bonus that can double your initial balance. It’s a must-do step for any beginner. The offer applies to both the sportsbook and casino sections, giving you variety. Use a active code, complete your first deposit, and enjoy playing with bonus cash. It’s that simple. https://www.ancientforestessences.com/members/profile/3425984/bonuslinebet100.htm linebet promo code newbonus
Begin your 1XBET journey with a promo code and enjoy more than just the game. Use the code during registration and get a welcome reward added to your deposit. It’s the best way to dive into 1XBET without risking too much of your own funds. With extra credits in your account, you can explore different betting options more confidently. https://runcam.com/fonts/articles/codigo-promocional-1xbet_bono-de-bienvenida.html Promo Code Of 1XBET
Begin your 1XBET journey with a promo code and enjoy more than just the game. Use the code during registration and get a welcome reward added to your deposit. It’s the best way to experience 1XBET without risking too much of your own funds. With extra credits in your account, you can explore different betting options more confidently. https://remonthome.com/files/pgs/le-code-promo-1xbet_bonus.html 1XBET Free Spin Promo Code
Архитектурные решения для деревянных домов под ключ в современном стиле
строительство деревянных домов под ключ https://www.derevyannye-doma-pod-klyuch-msk0.ru .
I was recommended this website through my cousin. I’m not
certain whether or not this post is written by way of
him as nobody else know such precise approximately my trouble.
You are wonderful! Thank you!
Топ-10 клининговых компаний для уборки. Каждая из этих компаний предлагает уникальные услуги. Необходимо обратить внимание на несколько ключевых моментов перед выбором клининговой компании.
Первый аспект, который необходимо учесть, это имидж компании. Посмотрите отзывы клиентов, чтобы получить представление о качестве услуг. Также важно проверить наличие необходимых лицензий и сертификатов у компании.
Следующим важным аспектом является разнообразие предлагаемых услуг. Разные компании могут предоставлять различные услуги, от уборки квартир до комплексного обслуживания офисов. Убедитесь, что компания предлагает именно те услуги, которые вам нужны.
Третий критерий, который стоит учесть, это стоимость услуг. Проведите сравнение цен у разных клининговых компаний, чтобы найти лучшее предложение. Учтите, что низкая стоимость может быть связана с низким качеством работы.
В итоге, подходите к выбору компании ответственно и учитывайте представленные советы. Надежная клининговая компания подарит вам чистоту и порядок в доме. Обратите внимание на рейтинг и отзывы, чтобы сделать правильный выбор.
клининговые услуги в москве рейтинг клининговые услуги в москве рейтинг .
Бонусный код на Мелбет при создании аккаунта — уникальная возможность заработать максимальный приветственный подарок до 130%. Просто укажите промокод BNB777 в форму регистрации на официальном сайте Мелбет — и бонус моментально отразится на счёте. Код работает в 2025 году и актуален для ставок на казино. Не пропустите выгоду — начните с преимуществом уже сегодня! https://telegra.ph/Promokod-Pri-Registracii-Melbet-06-21-2 Промокод На Ставку Мелбет
Лучшие модели jhl moto по соотношению цены и качества
jhl мотоциклы [url=https://www.jhlmoto01.ru]https://www.jhlmoto01.ru[/url] .
Услуги клининга в Москве приобретают все большее значение. Благодаря высоким темпам жизни жители мегаполиса ищут способы упростить быт.
Клиниговые фирмы предлагают целый ряд услуг в области уборки. Профессиональный клининг включает как стандартную уборку, так и глубокую очистку в зависимости от потребностей клиентов.
При выборе клининговой компании важно обратить внимание на опыт работы и отзывы клиентов. Необходимо обращать внимание на стандарты и профессионализм уборщиков.
Таким образом, услуги клининга в Москве предоставляют возможность сэкономить время. Клиенты могут легко найти компанию, предоставляющую услуги клининга, для поддержания чистоты.
служба клининга http://www.uborkaklining1.ru/ .
Услуги клининга для бизнеса: чистота как часть корпоративного имиджа
клининговая компания москва http://kliningovaya-kompaniya10.ru/ .
Портфолио наших каркасных домов: реальные фото построенных объектов
дом каркасный под ключ http://www.spb-karkasnye-doma-pod-kluch.ru/ .
Ліхтар Police — це надійний пристрій для щоденного носіння. Завдяки довгому заряду він виконає своє завдання. bailong фонарик налобный фонарь x-balog
Каркасные дома на винтовых сваях — быстрое и надёжное решение
каркасные дома санкт петербург каркасные дома санкт петербург .
Принты и надписи на футболках: ваш стиль — наша работа
футболки с надписями на заказ https://www.pechat-na-futbolkah777.ru/ .
Посетите наш сайт и узнайте о услугах клининга в спб цены!
Клининговые услуги в Санкт-Петербурге востребованы как никогда. С каждым годом всё больше компаний предлагают широкий спектр услуг по уборке и обслуживанию помещений.
Пользователи услуг клининга отмечают высокое качество и удобство. Большинство компаний предлагает индивидуальный подход к каждому клиенту, учитывая все пожелания.
В спектр клининговых услуг входят как плановые уборки, так и одноразовые мероприятия
Лучшие решения для тех, кто выбирает деревянные дома под ключ с экологичным интерьером
дом деревянный под ключ цена https://derevyannye-doma-pod-klyuch-msk0.ru .
Zgodnie z bitqz zkusenosti, platforma przyspiesza proces inwestowania i poprawia jakość decyzji. Nowoczesne narzędzia pracują dla Ciebie.
Bitqt to nowoczesna platforma do handlu, pozwalająca inwestorom na trading na rynkach finansowych. Bitqt stosuje innowacyjne algorytmy, aby analizować rynki na bieżąco, co daje użytkownikom możliwość dokonywania przemyślanych decyzji inwestycyjnych.
Platforma oferuje wiele opcji, które ułatwiają trading. Inwestorzy mogą zautomatyzować swoje transakcje, co przyczynia się do większych zysków. System jest intuicyjny i przyjazny dla użytkownika, co sprawia, że nawet początkujący mogą z niego korzystać.
Bitqt zapewnia również bezpieczeństwo danych użytkowników. Użycie innowacyjnych technologii zabezpieczeń pozwala użytkownikom czuć się bezpiecznie podczas handlu. To sprawia, że Bitqt jest zaufanym wyborem dla wielu inwestorów.
Wnioskując, Bitqt to doskonała platforma dla tych, którzy chcą inwestować na rynkach finansowych. Z dzięki nowoczesnym narzędziom, bezpieczeństwu i prostocie obsługi, każdy może zacząć swoją przygodę z handlem. Zainwestuj w przyszłość z Bitqt.
Все клининг Москва цены действуют на момент оформления заявки. Оформить заказ можно по телефону или через сайт.
В последние годы клининг в Москве становится все более востребованным. Растущее число москвичей начинает доверять уборку своих объектов профессиональным клининговым компаниям.
Цены на клининг могут варьироваться в зависимости от специфики услуг. Например, стандартная уборка квартиры может стоить от 1500 до 5000 рублей.
Также можно заказать дополнительные услуги, включая мойку окон и химчистку ковров. Добавление таких услуг может существенно повысить итоговую цену клининга.
Перед тем как выбрать клининговую компанию, стоит провести небольшой анализ рынка. Важно учитывать мнения клиентов и репутацию компании.
Grab the latest online casino promo code and enjoy cashback on your favorite games. Simply redeem the code and upgrade your gaming experience today! https://www.imdb.com/list/ls599719681/ loyalty bonus promo code
Но, говоря, взвешивай каждое слово, если не хочешь не только неизбежной, но и мучительной смерти. Профессиональные переводы: Точность и качество для вашего бизнеса – Турникет ищете, гражданин? – треснувшим тенором осведомился клетчатый тип.
Слово «что» он произнес дискантом, «вам» – басом, а «угодно» у него совсем не вышло. Нотариальный перевод в Москве: Быстро, Надежно, Доступно! – Не притворяйтесь! – грозно сказал Иван и почувствовал холод под ложечкой.
Удивите гостей или побалуйте себя — доставка роллов из свежайших продуктов уже в пути. В меню сотни сочетаний вкусов.
Заказать суши довольно просто. Существует несколько способов заказа суши, включая сайт ресторана и мобильные приложения. Каждый из этих способов предлагает определенные плюсы и минусы.
Отзывы о ресторане могут помочь сделать правильный выбор. Отзывы могут подсказать, стоит ли заказывать именно там. Так вы сможете избежать возможных неприятных сюрпризов и выбрать заведение с хорошей репутацией.
Проверьте меню заведения, прежде чем сделать заказ. Разные рестораны могут предлагать различные варианты суши и роллов. Выбор уникальных и необычных позиций может сделать ваш вечер интереснее.
При заказе обязательно уточните, когда ожидается доставка. Уточнение времени доставки поможет избежать ожидания и обеспечит комфортное времяпрепровождение. Также важно узнать, есть ли доставка в вашу местность.
Joining 1XBET? Make sure you apply the bonus promo code to unlock extra betting funds. Once you register, there’s a field to add the code – and that’s where the magic happens. 1XBET often rewards new players with bonuses on their first deposit, and using a code makes you eligible for the full amount. Whether you’re into sports betting or slots – your balance will thank you. https://www.imdb.com/list/ls599118902/ 1XBET Apk Promo Code
Interested in 1XBET? Use a registration promo code to make the most out of your first deposit. New members can enjoy up to 100% bonus when they enter a code during the sign-up process. This bonus is available for both sports betting and casino lovers. Don’t miss out – claim your starting bonus right from the beginning with a trusted 1XBET promo code! https://www.imdb.com/list/ls599131530/ 1XBET Welcome Bonus Promo Code
Con los drones iluminados, cada noche se convierte en una experiencia escénica única. Adaptamos nuestros diseños visuales a tus ideas y objetivos, ofreciendo un show elegante y personalizable.
El espectáculo de drones ha ganado popularidad en los últimos años. Estos espectáculos fusionan innovación tecnológica, expresión artística y entretenimiento. Las presentaciones de drones se han convertido en una atracción habitual en festivales y acontecimientos.
Los drones iluminados crean patrones impresionantes en el cielo nocturno. Las audiencias suelen quedar asombradas por la combinación de luces y coreografías.
Varios organizadores deciden recurrir a compañías dedicadas a la producción de espectáculos de drones. Estas empresas cuentan con pilotos capacitados y equipos de última generación.
La seguridad es un aspecto crucial en estos espectáculos. Se establecen medidas estrictas para asegurar la seguridad del público. El porvenir de los espectáculos de drones es alentador, gracias a las constantes mejoras en la tecnología.
Looking for the best sportsbook promo today? Unlock your exclusive bonus and start betting with extra value. No deposit needed, just enter the promo and win big! https://webdirectory11.com/listings1059520/meilleur-code-promo-1xbet-pour-bonus-instantan%C3%A9-en-afrique Betting free offer
En yeni ve popüler filmler, hızlı erişim imkanıyla sizlerle buluşuyor. Sitemiz üzerinden film izle 4k keyfini doyasıya yaşayın ve kaliteli görüntünün tadını çıkarın.
Son yıllarda yayın platformlarının yükselişi dikkat çekici oldu. Önemli bir trend, özellikle Full HD ve 4K çözünürlüklerde yüksek tanımlı içeriğe olan talebin artmasıdır. İzleyiciler, netlik ve detayları ön plana çıkaran daha sürükleyici deneyimler istiyor.
Full HD filmler 1920×1080 piksel çözünürlük sunarak etkileyici görsel kalite sağlar. Daha büyük ekranlarda bu çözünürlük ön plana çıkar, izleyicilerin her detayı takdir etmesini sağlar. Ancak, 4K filmler bu deneyimi daha da ileriye taşıyarak 3840×2160 piksel gibi çok daha yüksek bir çözünürlük sunar.
Bu talebi fark eden yayın hizmetleri, geniş Full HD ve 4K film koleksiyonları sağlamaya başladı. Böylece, seyirciler hem yeni yapımları hem de sevilen klasik filmleri en yüksek görsel kalitede izleyebiliyor. Ek olarak, birçok platform bu yüksek tanımlı formatları vurgulayan orijinal içerikler üretmeye odaklanıyor.
Kısaca, yayın platformlarında Full HD ve 4K filmlerin artması izleyici zevklerindeki değişimi ortaya koyuyor. Teknoloji ilerledikçe, görsel içerik tüketiminde çok daha büyük değişiklikler yaşanacaktır. Bu trendler, film sektörü ve evde izleme alışkanlıklarının geleceğini önemli ölçüde değiştirecektir.
Enter the right sports bet reward code and get a free chance to win. Limited availability, so use it today and enjoy free wagers! https://www.imdb.com/list/ls599335779/ Betting promo code
Высококвалифицированные врачи и медсестры работают в нашей наркоклинике СПб. Гарантируем анонимность и индивидуальный подход к лечению зависимостей.
Клиника наркологии предоставляет услуги по лечению зависимостей и реабилитации. В учреждении работают опытные врачи и консультанты, которые занимаются лечением зависимостей.
Одной из главных задач клиники является диагностика и лечение алкогольной и наркотической зависимости. Лечение осуществляется с использованием сочетания медикаментозной терапии и психологической поддержки.
Специалисты работают с клиентами над психологическими аспектами их зависимостей. Это помогает пациентам не только избавиться от физической зависимости, но и предотвратить рецидивы.
Длительность реабилитации варьируется в зависимости от индивидуальных особенностей пациента. Важно помнить, что процесс выздоровления требует времени, но результаты оправдают усилия.
Онлайн-покупка без хлопот. Вы можете легко купить готовый проект дома на нашем сайте и получить документацию в электронном виде.
Проекты домов становятся все более популярными среди людей, ищущих идеальное жилье. Определение подходящего проекта дома является решающим шагом на пути к уюту и комфорту.
Существует множество стилей и разновидностей проектов домов. Каждый человек может найти что-то подходящее для себя.
Одним из основных факторов при выборе проекта является размер земельного участка. Важно также оценить окружающую среду и климатические условия.
Современные технологии позволяют создавать уникальные проекты домов. Проекты могут модифицироваться в зависимости от предпочтений и потребностей клиентов.
получить деньги под залог птс
zaimpod-pts90.ru
деньги под птс машины
Планируете незабываемый отдых на Черном море? Джубга встретит вас ласковым солнцем, чистым песком и уютными вариантами размещения. Найдите идеальное жилье для всей семьи по привлекательным ценам через наш сервис джубга отдых.
Джубга — это прекрасное место для отдыха на Черном море. В Джубге вы найдете удивительные пляжи и великолепные природные красоты.
Множество туристов приезжает сюда каждый год, чтобы насладиться местными достопримечательностями. Среди популярных мест можно выделить водопады и дольмены.
Кроме того, Джубга предлагает разнообразные развлечения для всей семьи. Здесь можно заниматься различными видами активного отдыха, включая водные виды спорта и прогулки.
Отдых на пляже — это неотъемлемая часть вашего пребывания в Джубге. Здесь вы сможете наслаждаться солнцем и морскими волнами, а также попробовать местные блюда в кафе.
Bet with a bonus by using this reward code. It’s easy and gives you more value for your bet. Join now and experience real betting excitement. https://prrush.com/profile.php?user=elliott-dawbin-451010&action=view&com=profile&from=space Betting promo code
drenazhnye-sistemy-812.ru .
Узнайте, во сколько обойдется ваш идеальный отпуск. Наш сайт предоставляет детальную информацию по абхазия отдых цена.
Абхазия предлагает чудесные условия для отдыха и незабываемые впечатления. В этой стране моря, гор и сочных зелёных долин возможно найти всё для идеального отдыха.
Среди путешественников Абхазия пользуется большой популярностью благодаря своим природным богатствам. Здесь можно не только отдохнуть на пляже, но и заняться активными видами спорта.
Каждый путешественник сможет найти подходящее место для проживания в Абхазии. Гастрономическая культура Абхазии порадует даже самых искушённых гурманов.
Независимо от времени года, отпуск в Абхазии будет незабываемым и полным позитивных эмоций. Не упустите возможность исследовать эту прекрасную страну и создать свои уникальные воспоминания.
Насладитесь каждым моментом на борту современной яхты — прокат яхт сочи предлагает гибкие маршруты и приятные условия для отдыха.
Чартер яхты становится все более популярным среди любителей отдыха. Плавание на яхте открывает перед вами удивительные горизонты и дарит незабываемые впечатления.
Подбор яхты — ключевой момент, который стоит учитывать при планировании отдыха. Тип и размер яхты имеют большое значение, поэтому выбирайте то, что подходит именно вам.
При аренде яхты важно внимательно изучить все пункты договора. Некоторые сервисы предлагают дополнительные услуги, включая услуги профессионального капитана.
Важно правильно спланировать маршрут, чтобы ваш отдых был максимально комфортным. Посетите популярные места, такие как уединенные бухты или живописные острова.
Все было кончено, и говорить более было не о чем. Займы на дом: как получить деньги не выходя из дома — ТОП МФО Рейтинг Следующая дверь несла на себе краткую, но уже вовсе непонятную надпись: «Перелыгино».
Удивление выразилось на лице секретаря, сгорбившегося над низеньким столом и записывавшего показания. Нотариальный перевод документов: когда и как оформить — Бюро нотариальных переводов Плясали: Драгунский, Чердакчи, маленький Денискин с гигантской Штурман Жоржем, плясала красавица архитектор Семейкина-Галл, крепко схваченная неизвестным в белых рогожных брюках.
Nuestra compañía de espectáculos de luces con drones fusiona tecnología, música y luz para ofrecer espectáculos llenos de emoción, dinamismo y belleza. Una propuesta única para sorprender a cualquier audiencia.
El espectáculo de drones ha ganado popularidad en los últimos años. Estos espectáculos fusionan innovación tecnológica, expresión artística y entretenimiento. Las demostraciones de drones son frecuentemente vistas en festivales y celebraciones importantes.
Los drones iluminados crean patrones impresionantes en el cielo nocturno. Los asistentes se sorprenden con la sincronización y el despliegue de luces en el aire.
Numerosos planificadores de eventos eligen contratar a empresas expertas para llevar a cabo estos shows. Dichas compañías tienen personal cualificado y los equipos más modernos disponibles.
La seguridad es un aspecto crucial en estos espectáculos. Se implementan protocolos rigurosos para garantizar la protección de los asistentes. El porvenir de los espectáculos de drones es alentador, gracias a las constantes mejoras en la tecnología.
Here’s more on the topic https://my-caffe.ru/
Инновационные методы терапии применяет наркологический центр в СПб. Помогаем пациентам преодолеть физическую и психологическую зависимость.
В наркологической клинике пациенты находят поддержку и лечение для преодоления зависимостей. Здесь работают квалифицированные специалисты, готовые помочь каждому пациенту.
Основной целью наркологической клиники является выявление и лечение проблем, связанных с зависимостями. Комплексный подход к лечению включает как медицинские, так и психологические методы.
Психологическая поддержка играет ключевую роль в процессе восстановления. Психологические занятия способствуют личностному росту и укреплению мотивации для изменений.
Процесс реабилитации может занять различное время, в зависимости от сложности случая. Однако, завоевание контроля над своей жизнью стоит затраченных усилий.
Here’s more on the topic https://my-caffe.ru/
Here’s more on the topic https://my-caffe.ru/
If you’re a football fan, this football bet offer is made for you. Bet on top matches and get enhanced odds. Sign up now and start scoring! https://www.imdb.com/list/ls599269056/ Claim betting free credit
Enter the right sports bet reward code and get a free chance to win. Few codes left, so use it today and enjoy betting credits! https://www.imdb.com/list/ls599229587/ Free bet code
Limited time promo betting — claim the bonus and enhance your bet instantly. Perfect for weekend matches and live odds. Use your code before it expires! https://www.imdb.com/list/ls599248684/ Registration bonus betting
Play wisely with our betting reward deal. Whether you’re into football, tennis, or live sports, this exclusive offer gives you more value for every wager. Join now and win more. https://www.imdb.com/list/ls599258683/ Claim betting free credit
окна пвх окна пвх .
Откройте для себя гастрономические изыски местных кафе и ресторанов во время отпуска. Ваш отдых в архипо осиповке будет не только приятным, но и вкусным.
Архипо-Осиповка — это удивительное место для отдыха. Сюда часто приезжают туристы, желающие насладиться теплым морем и живописными пейзажами.
Пляжи этого курорта известны своим чистым песком и спокойными водами. Купание и водные развлечения делают отдых здесь незабываемым.
Разнообразие мест для проживания в Архипо-Осиповке удовлетворит любые потребности отдыхающих. Гостиницы и частные номера в Архипо-Осиповке подойдут как для романтического уикенда, так и для семейного отдыха.
Здесь вы найдете множество развлечений для всей семьи. Разнообразные экскурсии и культурные события позволят вам глубже узнать местную культуру.
Cash in with this sportsbook code! New users can use the promo code and enjoy extra betting credits. Bet smart and win big. https://www.imdb.com/list/ls599293904/ Get bonus for betting site
Activate bonus instantly with this hot sportsbook promo. New users can redeem this betting gift to kick off right. Limited offer — don’t miss out on your free cash. https://www.imdb.com/list/ls599240845/ Sportsbook no deposit bonus
подключить интернет
domashij-internet-omsk005.ru
подключить интернет омск
экстренный вывод из запоя череповец
vivod-iz-zapoya-cherepovec005.ru
экстренный вывод из запоя
viagra bestellen: farmacia campos garrido — Farmacia Asequible
Unlock your fast payout betting bonus now! Whether you’re a new or seasoned player, this betting deal is your ticket to real cash. Start today and feel the difference. https://www.imdb.com/list/ls599456199/ Low rollover betting bonus
купить куб дров .
https://rxfreemeds.shop/# RxFree Meds
https://enclomiphenebestprice.shop/# enclomiphene citrate
enclomiphene best price enclomiphene price enclomiphene buy
world pharmacy india: RxFree Meds — RxFree Meds
http://rxfreemeds.com/# RxFree Meds
вывод из запоя
vivod-iz-zapoya-kaluga004.ru
вывод из запоя круглосуточно калуга
вывод из запоя череповец
vivod-iz-zapoya-cherepovec006.ru
лечение запоя
Bet with a bonus by using this reward code. It’s fast and gives you better odds for your bet. Apply today and experience instant rewards. https://www.imdb.com/list/ls599405082/ Betting sign up bonus
https://farmaciaasequible.com/# mejor mГ©dico digestivo vigo
Farmacia Asequible Farmacia Asequible las mejores farmacias online
вывод из запоя цена
vivod-iz-zapoya-kaluga005.ru
экстренный вывод из запоя
Enter the right bonus claim code and get a free chance to win. Few codes left, so use it today and enjoy betting credits! https://www.imdb.com/list/ls599262703/ Bonus code betting
enclomiphene price enclomiphene citrate enclomiphene buy
Unlock maximum excitement by using bonus sweet bonanza, where explosive visuals meet frequent reward opportunities in each session.
The Sweet Bonanza slot game has gained immense popularity among online casino enthusiasts. It offers colorful visuals along with thrilling gameplay that attracts many.
The primary attraction of Sweet Bonanza lies in its unique features. The game employs a cascading reel system, enabling players to achieve several wins with one spin.
Additionally, it includes a free spins bonus that elevates gameplay. This feature can lead to substantial payouts, making it even more enticing.
In conclusion, Sweet Bonanza stands out as an entertaining slot game. With its vibrant design and rewarding features, it appeals to both new and experienced players.
домашний интернет тарифы
domashij-internet-perm004.ru
домашний интернет подключить пермь
enclomiphene best price: enclomiphene citrate — enclomiphene
https://enclomiphenebestprice.com/# buy enclomiphene online
Here’s more on the topic https://krylslova.ru/
экстренный вывод из запоя иркутск
vivod-iz-zapoya-irkutsk001.ru
вывод из запоя
Football season is here — grab your bonus for football betting and bet with an edge. This offer is valid for a short time, so claim it now. https://www.imdb.com/list/ls599284296/ Promo code betting
экстренный вывод из запоя калуга
vivod-iz-zapoya-kaluga006.ru
лечение запоя калуга
enclomiphene for men: buy enclomiphene online — buy enclomiphene online
https://rxfreemeds.com/# RxFree Meds
интернет провайдеры пермь
domashij-internet-perm005.ru
домашний интернет тарифы пермь
RxFree Meds Malegra DXT plus RxFree Meds
http://rxfreemeds.com/# reputable indian online pharmacy
buy enclomiphene online enclomiphene best price enclomiphene best price
вывод из запоя
vivod-iz-zapoya-irkutsk002.ru
экстренный вывод из запоя иркутск
экстренный вывод из запоя
vivod-iz-zapoya-krasnodar001.ru
вывод из запоя цена
Activate bonus instantly with this exclusive sportsbook promo. New users can redeem this betting gift to kick off right. Limited offer — don’t miss out on your free cash. https://www.imdb.com/list/ls599404558/ Use code for betting credit
домашний интернет в перми
domashij-internet-perm006.ru
подключить домашний интернет пермь
Get rewarded with this sportsbook code! New users can use the promo code and enjoy instant bonuses. Play sharp and win big. https://www.imdb.com/list/ls599459443/ Free betting promo code
enclomiphene testosterone: enclomiphene — enclomiphene buy
http://farmaciaasequible.com/# Farmacia Asequible
экстренный вывод из запоя
vivod-iz-zapoya-krasnodar002.ru
экстренный вывод из запоя
Want to bet now? Claim code and bet now with no delays. Just use the code, fund your account, and enjoy your bonus immediately. https://liverpooloffside.sbnation.com/users/1xbet_promo_code_for_registration_india Betting site no deposit code
enclomiphene best price enclomiphene price enclomiphene
Looking for the best sports betting deal of the day? Unlock your exclusive bonus and start betting with extra value. Instant activation, just enter the promo and win big! https://www.battleofcali.com/users/1xbet_bangladesh_promo_code Betting app free bet
лечение запоя иркутск
vivod-iz-zapoya-irkutsk003.ru
вывод из запоя круглосуточно иркутск
http://rxfreemeds.com/# simvastatin pharmacy prices
домашний интернет ростов
domashij-internet-rostov004.ru
домашний интернет в ростове
Activating a promo often requires a promo code. Insert them while creating your account to unlock the reward. https://www.imdb.com/list/ls599456532/ Sportsbook account bonus
лечение запоя краснодар
vivod-iz-zapoya-krasnodar003.ru
лечение запоя краснодар
Farmacia Asequible: farmacia de guardia en vigo hoy — para que sirve elocom
проверика организации https://proverit-kontragenta.ru .
лечение запоя калуга
vivod-iz-zapoya-kaluga004.ru
вывод из запоя круглосуточно
http://farmaciaasequible.com/# farmacia cerca de mi ubicación abierta
la boutique del sabor murcia carmacia Farmacia Asequible
https://enclomiphenebestprice.shop/# enclomiphene
enclomiphene citrate enclomiphene for men enclomiphene
экстренный вывод из запоя калуга
vivod-iz-zapoya-kaluga005.ru
лечение запоя
diprogenta comprar online: Farmacia Asequible — Farmacia Asequible
http://meximedsexpress.com/# mexican rx online
экстренный вывод из запоя калуга
vivod-iz-zapoya-kaluga006.ru
лечение запоя
проверить провайдера по адресу
domashij-internet-samara004.ru
провайдеры интернета в самаре по адресу
compounding pharmacy MediSmart Pharmacy online pharmacy generic finasteride
Лечение запоя — это важный шаг на пути к восстановлению. Часто после интенсивного потребления спиртного возникают признаки синдрома отмены: головная боль, тошнота, общее недомогание. При таких обстоятельствах требуется детоксикация организма и улучшение работы печени.Лечение при помощи инфузий является эффективным средством снять интоксикацию и облегчить состояние пациента. Борьба с алкогольной зависимостью должно включать медицинскую помощь и реабилитацию. Эффективное лечение может резко сократить симптоматику запоя.На сайте vivod-iz-zapoya-krasnoyarsk001.ru можно найти информацию о профессиональной помощи, реабилитационных программах и методах лечения алкогольной зависимости. Не забывайте заботиться о своем здоровье!
https://indomedsusa.com/# IndoMeds USA
MexiMeds Express: mexican border pharmacies shipping to usa — MexiMeds Express
IndoMeds USA: online pharmacy india — cheapest online pharmacy india
провайдер по адресу самара
domashij-internet-samara005.ru
интернет по адресу
вывод из запоя краснодар
vivod-iz-zapoya-krasnodar001.ru
вывод из запоя цена
MexiMeds Express mexican rx online MexiMeds Express
http://meximedsexpress.com/# MexiMeds Express
prozac online pharmacy: MediSmart Pharmacy — online pharmacy uk prozac
https://indomedsusa.shop/# indianpharmacy com
my canadian pharmacy review: MediSmart Pharmacy — certified canadian international pharmacy
Activate bonus instantly with this exclusive sportsbook promo. New users can redeem this betting gift to kick off right. Limited offer — don’t miss out on your reward. https://www.imdb.com/list/ls599480711/ Best promo code for betting
провайдер интернета по адресу самара
domashij-internet-samara006.ru
интернет по адресу дома
http://meximedsexpress.com/# MexiMeds Express
canadian pharmacy world: MediSmart Pharmacy — canadian pharmacy 24
Помощь наркологов – это набор действий‚ направленных на лечение зависимости от психоактивных веществ . На сайте vivod-iz-zapoya-krasnoyarsk003.ru можно найти информацию о наркологических клиниках ‚ предлагающих профессиональную помощь при различных формах зависимости. Лечение начинается с процесса очищения организма‚ после которой проводятся консультации специалистов и персонализированное лечение. Психотерапия и группы поддержки играют ключевую роль в восстановлении после зависимости . Также важна интеграция в общество и поддержка близких людей‚ что способствует предотвращению возврата к зависимости.
вывод из запоя круглосуточно
vivod-iz-zapoya-krasnodar002.ru
экстренный вывод из запоя краснодар
IndoMeds USA indian pharmacy paypal world pharmacy india
buying from online mexican pharmacy MexiMeds Express MexiMeds Express
https://indomedsusa.shop/# indianpharmacy com
подключить интернет
domashij-internet-spb004.ru
подключить домашний интернет в санкт-петербурге
https://medismartpharmacy.com/# advanced rx pharmacy
вывод из запоя минск
vivod-iz-zapoya-minsk001.ru
лечение запоя минск
Be smart with your free bets. Avoid risky markets unless confident. https://www.imdb.com/list/ls599909596/ Sports bet reward code
https://indomedsusa.com/# mail order pharmacy india
canadian mail order pharmacy: MediSmart Pharmacy — medication canadian pharmacy
вывод из запоя краснодар
vivod-iz-zapoya-krasnodar003.ru
вывод из запоя краснодар
Popular sportsbooks offer welcome bonuses for new users to attract new players. These offers usually include no-deposit rewards or free spins. https://www.imdb.com/list/ls599908495/ Free bet without deposit required
benzer pharmacy north american pharmacy viagra ribavirin online pharmacy
https://indomedsusa.com/# IndoMeds USA
no prescription pharmacy: MediSmart Pharmacy — target pharmacy zoloft price
подключение интернета по адресу
domashij-internet-spb005.ru
подключение интернета санкт-петербург