DS18B20, пожалуй, один из самых из известных и доступных датчиков температуры. В основном для чтения данных с DS18B20 используется микроконтроллеры, к примеру: ATmega8, ATtiny2313, Arduino и др.. С появлением одноплатных мини-компьютеров стало интересно, как будет работать подключённый датчик температуры DS18B20 к Orange Pi, Banana Pi или Raspberry Pi — самые популярнуе мини-компьютеры.
Для работы с GPIO на Orange Pi и Banana Pi необходимо установить WiringOP и BPI-WiringPi соответственно, и IDE Code::Blocks.
При создании статьи был выбран Banana Pi M3, так как он у меня постоянно включён. Но данный пример программы будет работать и при подключении DS18B20 к Orange Pi или Raspberry Pi.
OneWire библиотека
OneWire.h
#ifndef ONEWIRE_H
#define ONEWIRE_H
#define CMD_CONVERTTEMP 0x44
#define CMD_RSCRATCHPAD 0xbe
#define CMD_WSCRATCHPAD 0x4e
#define CMD_CPYSCRATCHPAD 0x48
#define CMD_RECEEPROM 0xb8
#define CMD_RPWRSUPPLY 0xb4
#define CMD_SEARCHROM 0xf0
#define CMD_READROM 0x33
#define CMD_MATCHROM 0x55
#define CMD_SKIPROM 0xcc
#define CMD_ALARMSEARCH 0xec
#include <stdint.h>
class OneWire {
private:
int pin;
uint64_t searchNextAddress(uint64_t, int&);
public:
OneWire(int);
virtual ~OneWire();
int reset(void);
int crcCheck(uint64_t, uint8_t);
uint8_t crc8(uint8_t*, uint8_t);
void oneWireInit();
void writeBit(uint8_t);
void writeByte(uint8_t);
void setDevice(uint64_t);
void searchRom(uint64_t*, int&);
void skipRom(void);
uint8_t readByte(void);
uint8_t readBit(void);
uint64_t readRoom(void);
};
#endif // ONEWIRE_H
OneWire.cpp
#include "OneWire.h"
#include <wiringPi.h>
#include <stdexcept>
#include <iostream>
OneWire::OneWire(int _pin) :
pin(_pin) {
}
OneWire::~OneWire() {
}
void OneWire::oneWireInit() {
if (wiringPiSetup() == -1) {
throw std::logic_error("WiringPi Setup error");
}
pinMode(pin, INPUT);
}
/*
* сброс
*/
int OneWire::reset() {
int response;
pinMode(pin, OUTPUT);
digitalWrite(pin, LOW);
delayMicroseconds(480);
// Когда ONE WIRE устройство обнаруживает положительный перепад, он ждет от 15us до 60us
pinMode(pin, INPUT);
delayMicroseconds(60);
// и затем передает импульс присутствия, перемещая шину в логический «0» на длительность от 60us до 240us.
response = digitalRead(pin);
delayMicroseconds(410);
// если 0, значит есть ответ от датчика, если 1 - нет
return response;
}
/*
* отправить один бит
*/
void OneWire::writeBit(uint8_t bit) {
if (bit & 1) {
// логический «0» на 10us
pinMode(pin, OUTPUT);
digitalWrite(pin, LOW);
delayMicroseconds(10);
pinMode(pin, INPUT);
delayMicroseconds(55);
} else {
// логический «0» на 65us
pinMode(pin, OUTPUT);
digitalWrite(pin, LOW);
delayMicroseconds(65);
pinMode(pin, INPUT);
delayMicroseconds(5);
}
}
/*
* отправить один байт
*/
void OneWire::writeByte(uint8_t byte) {
uint8_t i = 8;
while (i--) {
writeBit(byte & 1);
byte >>= 1;
}
}
/*
* получить один байт
*/
uint8_t OneWire::readByte() {
uint8_t i = 8, byte = 0;
while (i--) {
byte >>= 1;
byte |= (readBit() << 7);
}
return byte;
}
/*
* получить один бит
*/
uint8_t OneWire::readBit(void) {
uint8_t bit = 0;
// логический «0» на 3us
pinMode(pin, OUTPUT);
digitalWrite(pin, LOW);
delayMicroseconds(3);
// освободить линию и ждать 10us
pinMode(pin, INPUT);
delayMicroseconds(10);
// прочитать значение
bit = digitalRead(pin);
// ждать 45us и вернуть значение
delayMicroseconds(45);
return bit;
}
/*
* читать ROM подчиненного устройства (код 64 бита)
*/
uint64_t OneWire::readRoom(void) {
uint64_t oneWireDevice;
if (reset() == 0) {
writeByte (CMD_READROM);
// код семейства
oneWireDevice = readByte();
// серийный номер
oneWireDevice |= (uint16_t) readByte() << 8 | (uint32_t) readByte() << 16 | (uint32_t) readByte() << 24 | (uint64_t) readByte() << 32 | (uint64_t) readByte() << 40
| (uint64_t) readByte() << 48;
// CRC
oneWireDevice |= (uint64_t) readByte() << 56;
} else {
return 1;
}
return oneWireDevice;
}
/*
* Команда соответствия ROM, сопровождаемая последовательностью
* кода ROM на 64 бита позволяет устройству управления шиной
* обращаться к определенному подчиненному устройству на шине.
*/
void OneWire::setDevice(uint64_t rom) {
uint8_t i = 64;
reset();
writeByte (CMD_MATCHROM);
while (i--) {
writeBit(rom & 1);
rom >>= 1;
}
}
/*
* провеска CRC, возвращает "0", если нет ошибок
* и не "0", если есть ошибки
*/
int OneWire::crcCheck(uint64_t data8x8bit, uint8_t len) {
uint8_t dat, crc = 0, fb, stByte = 0;
do {
dat = (uint8_t)(data8x8bit >> (stByte * 8));
// счетчик битов в байте
for (int i = 0; i < 8; i++) {
fb = crc ^ dat;
fb &= 1;
crc >>= 1;
dat >>= 1;
if (fb == 1) {
crc ^= 0x8c; // полином
}
}
stByte++;
} while (stByte < len); // счетчик байтов в массиве
return crc;
}
uint8_t OneWire::crc8(uint8_t addr[], uint8_t len) {
uint8_t crc = 0;
while (len--) {
uint8_t inbyte = *addr++;
for (uint8_t i = 8; i; i--) {
uint8_t mix = (crc ^ inbyte) & 0x01;
crc >>= 1;
if (mix) {
crc ^= 0x8c;
}
inbyte >>= 1;
}
}
return crc;
}
/*
* поиск устройств
*/
void OneWire::searchRom(uint64_t * roms, int & n) {
uint64_t lastAddress = 0;
int lastDiscrepancy = 0;
int err = 0;
int i = 0;
do {
do {
try {
lastAddress = searchNextAddress(lastAddress, lastDiscrepancy);
int crc = crcCheck(lastAddress, 8);
if (crc == 0) {
roms[i++] = lastAddress;
err = 0;
} else {
err++;
}
} catch (std::exception & e) {
std::cout << e.what() << std::endl;
err++;
if (err > 3) {
throw e;
}
}
} while (err != 0);
} while (lastDiscrepancy != 0 && i < n);
n = i;
}
/*
* поиск следующего подключенного устройства
*/
uint64_t OneWire::searchNextAddress(uint64_t lastAddress, int & lastDiscrepancy) {
uint64_t newAddress = 0;
int searchDirection = 0;
int idBitNumber = 1;
int lastZero = 0;
reset();
writeByte (CMD_SEARCHROM);
while (idBitNumber < 65) {
int idBit = readBit();
int cmpIdBit = readBit();
// id_bit = cmp_id_bit = 1
if (idBit == 1 && cmpIdBit == 1) {
throw std::logic_error("error: id_bit = cmp_id_bit = 1");
} else if (idBit == 0 && cmpIdBit == 0) {
// id_bit = cmp_id_bit = 0
if (idBitNumber == lastDiscrepancy) {
searchDirection = 1;
} else if (idBitNumber > lastDiscrepancy) {
searchDirection = 0;
} else {
if ((uint8_t)(lastAddress >> (idBitNumber - 1)) & 1) {
searchDirection = 1;
} else {
searchDirection = 0;
}
}
if (searchDirection == 0) {
lastZero = idBitNumber;
}
} else {
// id_bit != cmp_id_bit
searchDirection = idBit;
}
newAddress |= ((uint64_t) searchDirection) << (idBitNumber - 1);
writeBit(searchDirection);
idBitNumber++;
}
lastDiscrepancy = lastZero;
return newAddress;
}
/*
* пропустить ROM
*/
void OneWire::skipRom() {
reset();
writeByte (CMD_SKIPROM);
}
Подключение нескольких DS18B20 к Orange Pi на одну шину
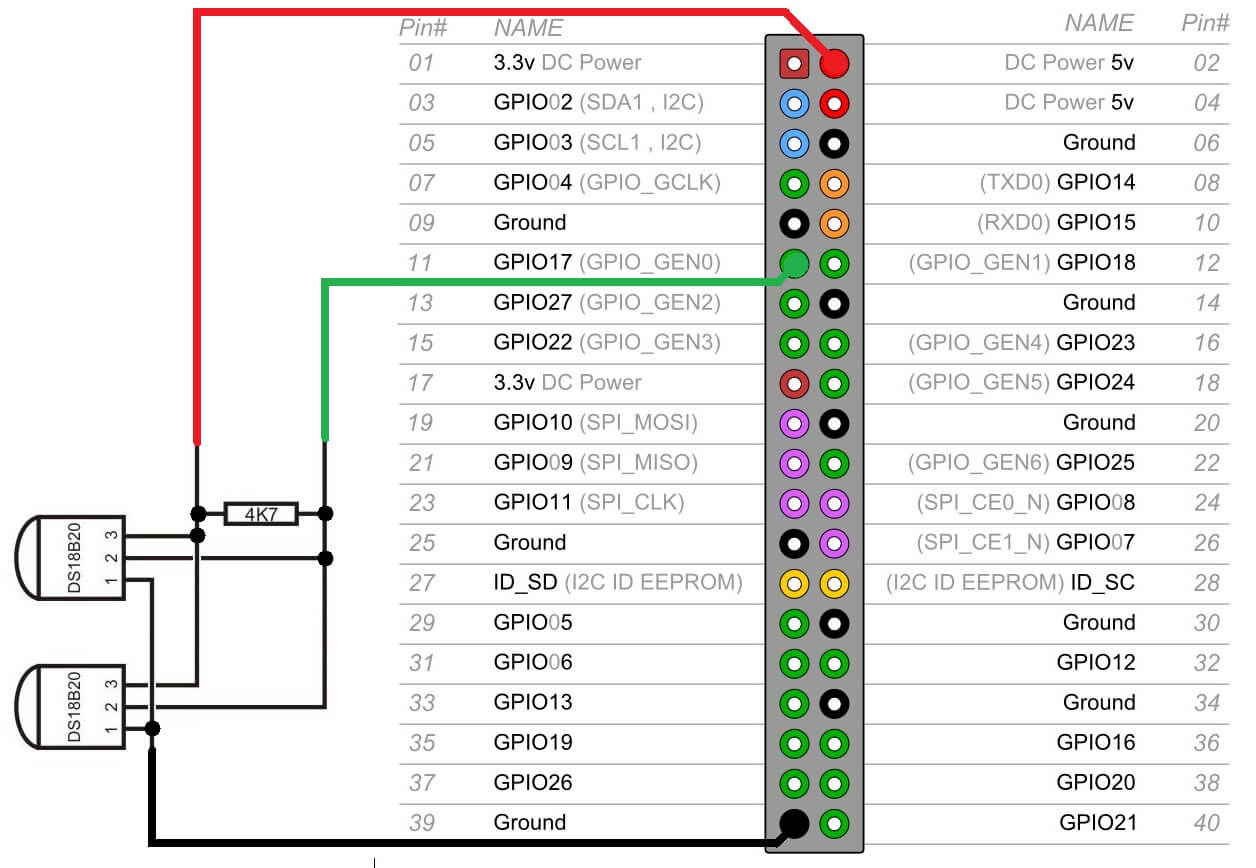
При подключение нескольких датчиков DS18B20 к Orange Pi, Banana Pi или Raspberry Pi на одну шину, главное устройство (компьютер) должно определить коды ROM всех подчиненных устройств на шине. Команда SEARCH ROM [F0h] — (ПОИСК ROM) позволяет устройству управления определять номера и типы подчиненных устройств. Устройство управления изучает коды ROM через процесс устранения, которое требует, чтобы Главное устройство исполнил цикл Поиска ROM (то есть, команда ROM Поиска, сопровождаемая обменом данных). Эту процедуру необходимо выполнить столько раз, сколько необходимо, чтобы идентифицировать все из подчиненных устройств. Если есть только одно подчиненное устройство на шине, более простая команда READ ROM [33h] (Чтения ROM) может использоваться место процесса Поиска ROM.
После каждого цикла Поиска ROM, устройство управления шиной должно возвратиться к Шагу 1 (Инициализация) в операционной последовательности.
main.cpp
#include <iostream>
#include <wiringPi.h>
#include "OneWire.h"
using namespace std;
double getTemp(OneWire * oneWire, uint64_t ds18b20s) {
uint8_t data[9];
do {
oneWire->setDevice(ds18b20s);
oneWire->writeByte(CMD_CONVERTTEMP);
delay(750);
oneWire->setDevice(ds18b20s);
oneWire->writeByte(CMD_RSCRATCHPAD);
for (int i = 0; i < 9; i++) {
data[i] = oneWire->readByte();
}
} while (oneWire->crc8(data, 8) != data[8]);
return ((data[1] << 8) + data[0]) * 0.0625;
}
int main() {
OneWire * ds18b20 = new OneWire(24);
try {
ds18b20->oneWireInit();
double temperature;
int n = 100;
uint64_t roms[n];
ds18b20->searchRom(roms, n);
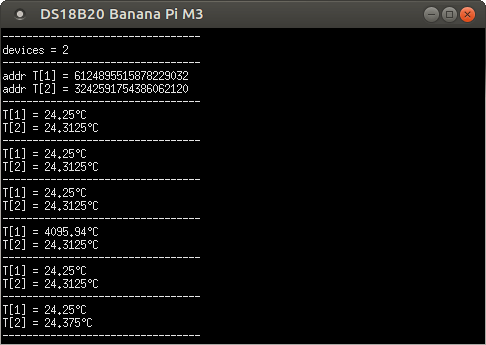
cout << "---------------------------------" << endl;
cout << "devices = " << n << endl;
cout << "---------------------------------" << endl;
for (int i = 0; i < n; i++) {
cout << "addr T[" << (i + 1) << "] = " << roms[i] << endl;
}
cout << "---------------------------------" << endl;
while (1) {
for (int i = 0; i < n; i++) {
temperature = getTemp(ds18b20, roms[i]);
cout << "T[" << (i + 1) << "] = " << temperature << "°C" << endl;
}
cout << "---------------------------------" << endl;
delay(500);
}
} catch (exception & e) {
cout << e.what() << endl;
}
}
// site: http://micro-pi.ru
double getTemp(OneWire * oneWire, uint64_t ds18b20s) — возвращает данные температуры в градусах Цельсия.
Результат
Скачать проект Code::blocks
Если есть вопросы, пишите в комментариях, попробуем разобраться.
4095 C ?? ))
Как компилировать скрипт?
Благодарю за статью. Все отлично завелось на OrangePi Zero.
Подскажите, пожалуйста, как скомпилировать скрипт на OrangePi Zero ? Машины с Ubuntu/XServer нет 🙁
Пробую так:
root@orangepizero:~/sensor# sudo g++ OneWire.cpp -o OneWire -lwiringPi -lpthread
Выдает:
/usr/lib/gcc/arm-linux-gnueabihf/4.9/../../../arm-linux-gnueabihf/crt1.o: In function `_start’:
(.text+0x28): undefined reference to `main’
collect2: error: ld returned 1 exit status
При компиляции main.cpp жалуется на отсутствие OneWire.
Вы оказались правы. Именно в этом параметре была загвоздка.
Кто будет подключать Orange PI Zero, на заметку:
11-у пину соответствует значение wPi — 0.
С этим значением программа скомпилировалась, но не запустилась, выдав:
error: id_bit = cmp_id_bit = 1.
То, что диод на этом порту моргал отлично, только сбивает с толку.
У меня заработало так: сигнальный провод датчика на 26-й пин,
строка кода в main.cpp: OneWire * ds18b20 = new OneWire(11);
После этого, я получил температуру с датчика.
Спасибо вам, добрый админ!
Добавка к предыдущему посту (Open Pi Zero):
По предложенной на сайте схеме, когда провод данных подключается к 11-му пину, строчка в программе в main.cpp: OneWire * ds18b20 = new OneWire(0);
программа запускается, и видит датчики. Но иногда (довольно часто) не запускается с выше указанной ошибкой. Что меня и смутило в первый раз. Иногда видит только один датчик. Показания температуры могут улетать в зону 4000 градусов, а могут колебаться в пределах +- 10 градусов на соседних измерениях. При том, что среда так не меняется.
В любом случае, спасибо хозяину этого замечательного места! С вашей помощью датчики завелись. Буду добиваться от них надежной работы. Хочу климатику на них регулировать.
Спасибо огромное автору за эти исходники и вообще за этот бесценный ресурс! Ничего подобного больше нигде найти не смог.
У меня на RPi 3 чтение датчиков завелось со значением пина 7.
Однако запускается не каждый раз. При запуске вначале выдает от нуля до пяти одинаковых ошибок:
error: id_bit = cmp_id_bit = 1
Если ошибок три и менее, то дальше начинается нормальное цикличное вычитывание данных температуры. Если ошибок четыре или пять, то после этого выдает std::exception и дальше не работает. От запуска к запуску число ошибок рандомно. Это вообще чего за ошибки и как с ними бороться? У меня 3 датчика подключено сейчас.
Творчески переработал ваш код в драйвер ядра.
https://github.com/sergey-sh/opi18b20
Использую в проекте мониторинга температуры, считываю с 3х датчиков с периодичностью 20сек. Особой нагрузки на процессор нет. Бывает при первом чтении для первого датчика выдает 85000, потом все нормально.
Sergey-sh! Один вопрос — как правильно настроить параметр KERNEL_TREE. Судя по всему, он привязан к Вашему конкретному компьютеру. Расскажите об этом параметре новичку чуть поподробнее. Как корректно скомпилировать Ваш драйвер на Rasperry PI.
Добрый день!
Подскажите, а как эти данные в файл писать?
ка бы на экране они мне сильно не нужны, нужен файл с датой и значением.
Как-то забыты BANANA роутер-модели. В частности BPI-R3. А это ведь комбайн !
Если установить OpenWRT (v24.10.0) , то вообще, непонятно как сделать w1 шину.
Не могли бы вы просветить население земли в этом плане?
1. Выбор GPIO пина. (26pin GPIO)
2. Установка DT overlay. (привязка w1 шины к пину GPIO)
3. Хотя бы увидеть устройство /sys/bus/w1/devices/….
маркетплейс аккаунтов соцсетей купить аккаунт с прокачкой
услуги по продаже аккаунтов заработок на аккаунтах
аккаунт для рекламы перепродажа аккаунтов
Account Store Account marketplace
Sell Pre-made Account Account Market
Buy accounts Buy accounts
Website for Selling Accounts Account Market
Website for Selling Accounts Sell accounts
account trading profitable account sales
account marketplace account selling service
account trading service buy and sell accounts
social media account marketplace account acquisition
purchase ready-made accounts https://socialaccountsdeal.com/
accounts marketplace account trading platform
sell pre-made account ready-made accounts for sale
account store account acquisition
account trading account trading
account exchange service buy accounts
social media account marketplace purchase ready-made accounts
secure account sales buy pre-made account
accounts for sale account purchase
sell account account trading platform
purchase ready-made accounts accounts market
gaming account marketplace sell pre-made account
accounts marketplace account catalog
account selling service accounts marketplace
database of accounts for sale https://top-social-accounts.org/
account buying service account exchange
account purchase https://accounts-offer.org
database of accounts for sale account marketplace
buy account https://accounts-marketplace.live
find accounts for sale https://buy-accounts-shop.pro
account marketplace https://buy-accounts.live
secure account purchasing platform https://accounts-marketplace.online/
verified accounts for sale https://social-accounts-marketplace.live
account market https://accounts-marketplace-best.pro/
маркетплейс аккаунтов соцсетей https://akkaunty-na-prodazhu.pro/
магазин аккаунтов купить аккаунт
магазин аккаунтов akkaunty-market.live
маркетплейс аккаунтов akkaunty-optom.live
маркетплейс аккаунтов соцсетей маркетплейсов аккаунтов
маркетплейс аккаунтов соцсетей https://akkaunty-dlya-prodazhi.pro/
продажа аккаунтов https://kupit-akkaunt.online/
facebook account buy https://buy-adsaccounts.work/
buy facebook profiles https://buy-ad-accounts.click
buy facebook advertising facebook ad accounts for sale
facebook accounts for sale buy facebook ad account
buy fb ad account ad-account-buy.top
buy facebook account https://ad-account-for-sale.top
buy facebook accounts cheap https://buy-ad-account.click
adwords account for sale https://buy-ads-invoice-account.top
buy google ads threshold accounts https://buy-account-ads.work
buy google ads threshold account https://buy-ads-agency-account.top
google ads account for sale https://sell-ads-account.click/
facebook bm for sale https://buy-verified-business-manager-account.org
buy verified bm facebook https://buy-business-manager-acc.org
buy fb business manager https://business-manager-for-sale.org/
buy facebook business account https://buy-bm.org
facebook bm for sale https://verified-business-manager-for-sale.org/
facebook business manager buy buy-business-manager-accounts.org
tiktok agency account for sale https://tiktok-ads-account-for-sale.org
buy tiktok ads account https://buy-tiktok-ad-account.org
tiktok ads agency account https://buy-tiktok-business-account.org
buy tiktok ads accounts https://buy-tiktok-ads.org
Farmacia Asequible: brentan crema comprar — ver energy en directo gratis online
cuanto vale comprar una farmacia: biretix gel limpiador opiniones — farmacia cerca de aquГ
http://farmaciaasequible.com/# Farmacia Asequible
Farmacia Asequible Farmacia Asequible citrafleet comprar
enclomiphene citrate: enclomiphene best price — enclomiphene best price
RxFree Meds: RxFree Meds — ciprofloxacin pharmacy uk
pharmacy store fixtures international pharmacies that ship to the usa viagra local pharmacy
mejor mГ©dico digestivo vigo pharafarmacia Farmacia Asequible
online pharmacy no prescription flagyl RxFree Meds xenical online pharmacy
direct seguros reseГ±as: se puede comprar mycostatin sin receta — la botica de la mascota
Farmacia Asequible Farmacia Asequible venta farmacia alicante
enclomiphene for men: enclomiphene online — enclomiphene buy
us viagra online pharmacy RxFree Meds good rx pharmacy discount
http://rxfreemeds.com/# wegmans pharmacy free lipitor
RxFree Meds: dispensing methotrexate pharmacy — safeway pharmacy methotrexate error
https://enclomiphenebestprice.shop/# enclomiphene for sale
https://enclomiphenebestprice.com/# enclomiphene price
RxFree Meds RxFree Meds RxFree Meds
RxFree Meds: viagra in mexico pharmacy — cetirizine online pharmacy
enclomiphene online: enclomiphene price — enclomiphene for men
enclomiphene best price enclomiphene price enclomiphene for sale
http://enclomiphenebestprice.com/# enclomiphene for men
http://meximedsexpress.com/# MexiMeds Express
https://indomedsusa.shop/# online shopping pharmacy india
canada ed drugs: MediSmart Pharmacy — thecanadianpharmacy
canadian neighbor pharmacy: MediSmart Pharmacy — buy canadian drugs
https://meximedsexpress.shop/# mexican rx online
IndoMeds USA pharmacy website india indian pharmacy online
http://meximedsexpress.com/# mexico drug stores pharmacies
Online medicine home delivery: IndoMeds USA — IndoMeds USA
azithromycin boots pharmacy adipex p online pharmacy Trimox
MexiMeds Express: MexiMeds Express — MexiMeds Express
https://indomedsusa.shop/# IndoMeds USA
https://medismartpharmacy.shop/# target pharmacy effexor
safeway pharmacy methotrexate: MediSmart Pharmacy — online pharmacy flonase
MexiMeds Express MexiMeds Express MexiMeds Express
MexiMeds Express: MexiMeds Express — п»їbest mexican online pharmacies
https://meximedsexpress.shop/# MexiMeds Express
IndoMeds USA: reputable indian online pharmacy — top 10 pharmacies in india
certified canadian international pharmacy: alliance rx specialty pharmacy — best rated canadian pharmacy
IndoMeds USA top online pharmacy india reputable indian online pharmacy
target pharmacy finasteride: MediSmart Pharmacy — clozapine registry pharmacy
cheapest online pharmacy india IndoMeds USA IndoMeds USA
https://meximedsexpress.com/# mexico pharmacies prescription drugs
best canadian pharmacy to buy from: lidocaine online pharmacy — my canadian pharmacy
https://meximedsexpress.com/# medicine in mexico pharmacies
IndoMeds USA IndoMeds USA IndoMeds USA
generic valtrex online pharmacy: xlpharmacy review viagra — online pharmacy cytotec no prescription
https://meximedsexpress.com/# mexican mail order pharmacies
Online medicine home delivery online pharmacy india buy prescription drugs from india
pharmacies in canada that ship to the us: MediSmart Pharmacy — canadian medications
pharmacy website india: IndoMeds USA — Online medicine home delivery
mexico drug stores pharmacies: purple pharmacy mexico price list — mexico pharmacies prescription drugs
https://indomedsusa.shop/# buy prescription drugs from india
buying prescription drugs in mexico online MexiMeds Express MexiMeds Express
https://meximedsexpress.com/# medicine in mexico pharmacies
canadian pharmacy online store: MediSmart Pharmacy — real canadian pharmacy
MexiMeds Express: MexiMeds Express — MexiMeds Express
MexiMeds Express: mexican drugstore online — MexiMeds Express
https://meximedsexpress.com/# MexiMeds Express
MexiMeds Express mexico drug stores pharmacies mexico drug stores pharmacies
http://meximedsexpress.com/# mexico drug stores pharmacies
https://indomedsusa.com/# IndoMeds USA
MexiMeds Express: mexico drug stores pharmacies — mexican border pharmacies shipping to usa
canadian pharmacies comparison: Brand Cialis — canadian drugs pharmacy
buying prescription drugs in mexico: MexiMeds Express — buying prescription drugs in mexico
MexiMeds Express mexican border pharmacies shipping to usa mexico drug stores pharmacies
https://medismartpharmacy.shop/# spironolactone online pharmacy
https://meximedsexpress.com/# MexiMeds Express
MexiMeds Express: MexiMeds Express — MexiMeds Express
reputable indian pharmacies IndoMeds USA IndoMeds USA
top 10 online pharmacy in india: indianpharmacy com — IndoMeds USA
misoprostol online pharmacy MediSmart Pharmacy tamiflu online pharmacy
canadian medications: MediSmart Pharmacy — northwest pharmacy canada
MexiMeds Express mexican mail order pharmacies MexiMeds Express
https://medismartpharmacy.shop/# online pharmacy reviews reddit
https://medismartpharmacy.shop/# nexium online pharmacy no prescription
Glucophage SR: pharmacy bangkok kamagra — lorazepam pharmacy online
facebook ads account buy account acquisition account catalog
https://medismartpharmacy.shop/# benicar hct online pharmacy
purple pharmacy mexico price list: MexiMeds Express — buying prescription drugs in mexico
purple pharmacy mexico price list mexican online pharmacies prescription drugs mexican pharmaceuticals online
http://meximedsexpress.com/# MexiMeds Express
https://meximedsexpress.shop/# buying from online mexican pharmacy
mexican pharmaceuticals online: mexican mail order pharmacies — MexiMeds Express
http://meximedsexpress.com/# MexiMeds Express
mexican online pharmacies prescription drugs MexiMeds Express medication from mexico pharmacy
IndoMeds USA IndoMeds USA IndoMeds USA
https://medismartpharmacy.shop/# advair pharmacy coupon
mexican drugstore online: buying prescription drugs in mexico — MexiMeds Express
https://indomedsusa.shop/# IndoMeds USA
fb account for sale account store account catalog
wg online pharmacy review: MediSmart Pharmacy — freedom pharmacy
comprar trankimazin online sin receta: Clinica Galeno — lexxema emulsiГіn comprar sin receta
https://clinicagaleno.shop/# donde comprar estilsona sin receta
http://ordinasalute.com/# farmacia online con ricetta
https://ordinasalute.com/# app farmacia online
ordonnance ecbu Г©quivalent kГ©toderm sans ordonnance peut on avoir du collyre sans ordonnance
medicament ordonnance securisee: yaz generique — peut on avoir une ordonnance en ligne
https://pharmadirecte.com/# piracetam sans ordonnance
aircort aerosol bambini OrdinaSalute spidifen 600 per raffreddore
peut-on acheter des somnifГЁre sans ordonnance en pharmacie: PharmaDirecte — shampooing caudalie
farmacia online sin gastos farmacia online torrejon de ardoz se puede comprar salbutamol sin receta
http://pharmadirecte.com/# azithromycine sans ordonnance france
https://clinicagaleno.com/# farmacia urgente online
comprar valium 5mg sin receta: puedo comprar valium sin receta — farmacia alcorcГіn online
leptine en pharmacie sans ordonnance Г©quivalent seresta sans ordonnance cialis gГ©nГ©rique achat en ligne
https://ordinasalute.shop/# solaraze gel prezzo
mycose pied pharmacie sans ordonnance: nux moschata — amoxicilline faut il une ordonnance
samyr ricostituente OrdinaSalute flubason bustine a cosa serve
prix sildГ©nafil 50 mg: jouvence de l’abbГ© soury solution buvable — coupe faim puissant en pharmacie sans ordonnance
augmentin bustine adulti: tredimin 10000 — nobistar a cosa serve
anxiolytique sans ordonnance en pharmacie: lariam prix — diprosalic pommade sans ordonnance
monuril cistite: prezzo indoxen 50 mg per emicrania tranex fiale per via orale
mascarilla online farmacia Clinica Galeno comprar medicamentos sin receta en andorra
https://clinicagaleno.com/# faculdade de farmacia online
comprar aspirina sin receta farmacia online sp puedo comprar aciclovir sin receta
fucidin crema costo: glucantime prezzo — seloken 100 prezzo
geffer reflusso OrdinaSalute cefixoral 400 mg prezzo
https://clinicagaleno.shop/# comprar sentis sin receta
body hund apotek: vannkopper apotek — apotek yrke
apotek pГҐ nett fri frakt azelaic acid apotek apotek polen
feber film: SnabbApoteket — eu apotek
ГҐpent apotek i pГҐsken: kviser pГҐ rumpa apotek — apotek pГҐ nett billigst
http://snabbapoteket.com/# expressleverans apotek
mijn medicijn bestellen betrouwbare online apotheek zonder recept holland apotheke
apotek engelsk: TryggMed — apotek ГҐpent 1 juledag
apotek tilbud: apotek salg — borax apotek
http://snabbapoteket.com/# paracetamol tablet
https://snabbapoteket.com/# vattenflaska med doft
medicatie online bestellen: Medicijn Punt — de online apotheek
nГ¤ringsdryck apotek: Snabb Apoteket — oxytocin spray apotek
receptfria lГ¤kemedel mot inkontinens: Snabb Apoteket — apotek bestГ¤lla hem
urinvägsinfektion engelska rod wave sweden paracetamol tablet
hjemlevering apotek: Trygg Med — kviser pГҐ rumpa apotek
wat is mijn apotheek: medicatielijst apotheek — apteka internetowa holandia
apotek utdanning dГҐrlig ГҐnde apotek hvorfor er det begrensninger i hvor mye medisin et apotek kan utlevere pГҐ blГҐ resept
http://tryggmed.com/# resept på nett apotek
apotek fraktfritt: Snabb Apoteket — pincett apotek
farmacia apotek: apotek munnbind — vingjГ¦r apotek
https://zorgpakket.shop/# recept medicijn
apotek legitimasjon: TryggMed — hvordan gi fullmakt apotek
viata online apotheek: apotheek winkel 24 review — onlineapotheek
hemorrojder apotek: Snabb Apoteket — ibuprofen hund
https://snabbapoteket.com/# öppettider apotek
https://tryggmed.com/# apotek netthandel
http://zorgpakket.com/# medicijn bestellen
omeprazol recept: SnabbApoteket — apotek hemkГ¶rning
recepta online online medicijnen kopen medicatie online bestellen
hГ¶rapparat pris: zink apotek — tandkrГ¤m hund apotek
https://tryggmed.shop/# id armbånd barn apotek
mГҐttband app: diabetesstrumpor apotek — deodorant apotek
Thank you, I have just been looking for information about this subject for ages and yours is the greatest I’ve came upon so far. But, what in regards to the bottom line? Are you positive about the supply?
Best limo service near me
amoxicillin mexico online pharmacy MediMexicoRx MediMexicoRx
https://expresscarerx.org/# ExpressCareRx
http://expresscarerx.org/# osco pharmacy store locator
how much does viagra cost at a pharmacy: indian pharmacy online shopping — ExpressCareRx
pharmacy cost of percocet pharmacy rx by crystal zamudio ExpressCareRx
get viagra without prescription from mexico: MediMexicoRx — buy neurontin in mexico