 В данной статье пойдет речь о том, как подключить датчик температуры DS18B20 к ATmega8 и отображать данные на ЖКИ-дисплее 16×1 на базе HD44780. Будут приведены три примеры программ работы с датчиком температуры, а именно: самый простой — подключение одного DS18B20 к ATmega8; подключение нескольких DS18B20 к ATmega8 на разные выводы микроконтроллера; самый сложный — подключение нескольких датчиков температуры DS18B20 к ATmega8 на одну шину. Для проверки работоспособности программ и схем был использован эмулятор Proteus 7 (ISIS 7 Professional). Код программ (проекты в Atmel Studio 7 целиком) вы сможете скачать по ссылке в конце статьи. После оптимизации кода вместо ATmega8 можно использовать более простой микроконтроллер ATtiny2313.
В данной статье пойдет речь о том, как подключить датчик температуры DS18B20 к ATmega8 и отображать данные на ЖКИ-дисплее 16×1 на базе HD44780. Будут приведены три примеры программ работы с датчиком температуры, а именно: самый простой — подключение одного DS18B20 к ATmega8; подключение нескольких DS18B20 к ATmega8 на разные выводы микроконтроллера; самый сложный — подключение нескольких датчиков температуры DS18B20 к ATmega8 на одну шину. Для проверки работоспособности программ и схем был использован эмулятор Proteus 7 (ISIS 7 Professional). Код программ (проекты в Atmel Studio 7 целиком) вы сможете скачать по ссылке в конце статьи. После оптимизации кода вместо ATmega8 можно использовать более простой микроконтроллер ATtiny2313.
OneWire библиотека
config.h
#ifndef CONFIG_H_ #define CONFIG_H_ #define F_CPU 8000000UL #define ONE_WIRE_PORT PORTB #define ONE_WIRE_DDR DDRB #define ONE_WIRE_PIN PINB #endif /* CONFIG_H_ */
OneWire.h
#ifndef ONEWIRE_H_ #define ONEWIRE_H_ #define CMD_CONVERTTEMP 0x44 #define CMD_RSCRATCHPAD 0xbe #define CMD_WSCRATCHPAD 0x4e #define CMD_CPYSCRATCHPAD 0x48 #define CMD_RECEEPROM 0xb8 #define CMD_RPWRSUPPLY 0xb4 #define CMD_SEARCHROM 0xf0 #define CMD_READROM 0x33 #define CMD_MATCHROM 0x55 #define CMD_SKIPROM 0xcc #define CMD_ALARMSEARCH 0xec void oneWireInit(uint8_t); void writeBit(uint8_t); void writeByte(uint8_t); void setDevice(uint64_t); void searchRom(uint64_t*, uint8_t&); void skipRom(void); uint8_t readByte(void); uint8_t readBit(void); uint8_t reset(void); uint8_t crcCheck(uint64_t, uint8_t); uint64_t readRoom(void); uint64_t searchNextAddress(uint64_t, uint8_t&); extern uint8_t ONE_WIRE_DQ; #endif /* ONEWIRE_H_ */
OneWire.cpp
#define DEVICES_ERROR 1
#include "config.h"
#include <avr/io.h>
#include <avr/interrupt.h>
#include <util/delay.h>
#include "OneWire.h"
uint8_t ONE_WIRE_DQ = PINB0;
void oneWireInit(uint8_t pin) {
ONE_WIRE_DQ = pin;
ONE_WIRE_PORT |= (1 << ONE_WIRE_DQ);
ONE_WIRE_DDR |= (1 << ONE_WIRE_DQ); // выход
}
/*
* сброс
*/
uint8_t reset() {
uint8_t response;
// импульс сброса, минимум 480us
ONE_WIRE_PORT &= ~(1 << ONE_WIRE_DQ);
ONE_WIRE_DDR |= (1 << ONE_WIRE_DQ); // выход
_delay_us(480);
// Когда ONE WIRE устройство обнаруживает положительный перепад, он ждет от 15us до 60us
ONE_WIRE_DDR &= ~(1 << ONE_WIRE_DQ); // вход
_delay_us(60);
// и затем передает импульс присутствия, перемещая шину в логический «0» на длительность от 60us до 240us.
response = (ONE_WIRE_PIN & (1 << ONE_WIRE_DQ));
_delay_us(410);
// если 0, значит есть ответ от датчика, если 1 - нет
return response;
}
/*
* отправить один бит
*/
void writeBit(uint8_t bit) {
if (bit & 1) {
cli();
// логический «0» на 1us
ONE_WIRE_PORT &= ~(1 << ONE_WIRE_DQ);
ONE_WIRE_DDR |= (1 << ONE_WIRE_DQ); // выход
_delay_us(10);
sei();
ONE_WIRE_DDR &= ~(1 << ONE_WIRE_DQ); // вход
_delay_us(55);
} else {
cli();
// логический «0» на 1us
ONE_WIRE_PORT &= ~(1 << ONE_WIRE_DQ);
ONE_WIRE_DDR |= (1 << ONE_WIRE_DQ); // выход
_delay_us(65);
ONE_WIRE_DDR &= ~(1 << ONE_WIRE_DQ); // вход
sei();
_delay_us(5);
}
}
/*
* отправить один байт
*/
void writeByte(uint8_t byte) {
uint8_t i = 8;
while (i--) {
writeBit(byte & 1);
byte >>= 1;
}
}
/*
* получить один байт
*/
uint8_t readByte() {
uint8_t i = 8, byte = 0;
while (i--) {
byte >>= 1;
byte |= (readBit() << 7);
}
return byte;
}
/*
* получить один бит
*/
uint8_t readBit(void) {
uint8_t bit = 0;
cli();
// логический «0» на 1us
ONE_WIRE_PORT &= ~(1 << ONE_WIRE_DQ);
ONE_WIRE_DDR |= (1 << ONE_WIRE_DQ); // вход
_delay_us(3);
// освободить линию и ждать 14us
ONE_WIRE_DDR &= ~(1 << ONE_WIRE_DQ); // вход
_delay_us(10);
// прочитать значение
if (ONE_WIRE_PIN & (1 << ONE_WIRE_DQ)) {
bit = 1;
}
// ждать 45us и вернуть значение
sei();
_delay_us(45);
return bit;
}
/*
* читать ROM подчиненного устройства (код 64 бита)
*/
uint64_t readRoom(void) {
uint64_t oneWireDevice;
if(reset() == 0) {
writeByte(CMD_READROM);
// код семейства
oneWireDevice = readByte();
// серийный номер
oneWireDevice |= (uint16_t)readByte()<<8 | (uint32_t)readByte()<<16 | (uint32_t)readByte()<<24 | (uint64_t)readByte()<<32 | (uint64_t)readByte()<<40 | (uint64_t)readByte()<<48;
// CRC
oneWireDevice |= (uint64_t)readByte()<<56;
} else {
return 1;
}
return oneWireDevice;
}
/*
* Команда соответствия ROM, сопровождаемая последовательностью
* кода ROM на 64 бита позволяет устройству управления шиной
* обращаться к определенному подчиненному устройству на шине.
*/
void setDevice(uint64_t rom) {
uint8_t i = 64;
reset();
writeByte(CMD_MATCHROM);
while (i--) {
writeBit(rom & 1);
rom >>= 1;
}
}
/*
* провеска CRC, возвращает "0", если нет ошибок
* и не "0", если есть ошибки
*/
uint8_t crcCheck(uint64_t data8x8bit, uint8_t len) {
uint8_t dat, crc = 0, fb, stByte = 0;
do {
dat = (uint8_t) (data8x8bit >> (stByte * 8));
for (int i = 0; i < 8; i++) { // счетчик битов в байте
fb = crc ^ dat;
fb &= 1;
crc >>= 1;
dat >>= 1;
if (fb == 1) {
crc ^= 0x8c; // полином
}
}
stByte++;
} while (stByte < len); // счетчик байтов в массиве
return crc;
}
/*
* поиск устройств
*/
void searchRom(uint64_t * roms, uint8_t & n) {
uint64_t lastAddress = 0;
uint8_t lastDiscrepancy = 0;
uint8_t err = 0;
uint8_t i = 0;
do {
do {
lastAddress = searchNextAddress(lastAddress, lastDiscrepancy);
if(lastAddress != DEVICES_ERROR) {
uint8_t crc = crcCheck(lastAddress, 8);
if (crc == 0) {
roms[i++] = lastAddress;
err = 0;
} else {
err++;
}
} else {
err++;
}
if (err > 3) {
return;
}
} while (err != 0);
} while (lastDiscrepancy != 0 && i < n);
n = i;
}
/*
* поиск следующего подключенного устройства
*/
uint64_t searchNextAddress(uint64_t lastAddress, uint8_t & lastDiscrepancy) {
uint8_t searchDirection = 0;
uint64_t newAddress = 0;
uint8_t idBitNumber = 1;
uint8_t lastZero = 0;
reset();
writeByte(CMD_SEARCHROM);
while (idBitNumber < 65) {
uint8_t idBit = readBit();
uint8_t cmpIdBit = readBit();
// id_bit = cmp_id_bit = 1
if (idBit == 1 && cmpIdBit == 1) {
return DEVICES_ERROR;
} else if (idBit == 0 && cmpIdBit == 0) {
// id_bit = cmp_id_bit = 0
if (idBitNumber == lastDiscrepancy) {
searchDirection = 1;
} else if (idBitNumber > lastDiscrepancy) {
searchDirection = 0;
} else {
if ((uint8_t) (lastAddress >> (idBitNumber - 1)) & 1) {
searchDirection = 1;
} else {
searchDirection = 0;
}
}
if (searchDirection == 0) {
lastZero = idBitNumber;
}
} else {
// id_bit != cmp_id_bit
searchDirection = idBit;
}
newAddress |= ((uint64_t) searchDirection) << (idBitNumber - 1);
writeBit(searchDirection);
idBitNumber++;
}
lastDiscrepancy = lastZero;
return newAddress;
}
/*
* пропустить ROM
*/
void skipRom() {
reset();
writeByte(CMD_SKIPROM);
}
Подключение одного DS18B20 к ATmega8
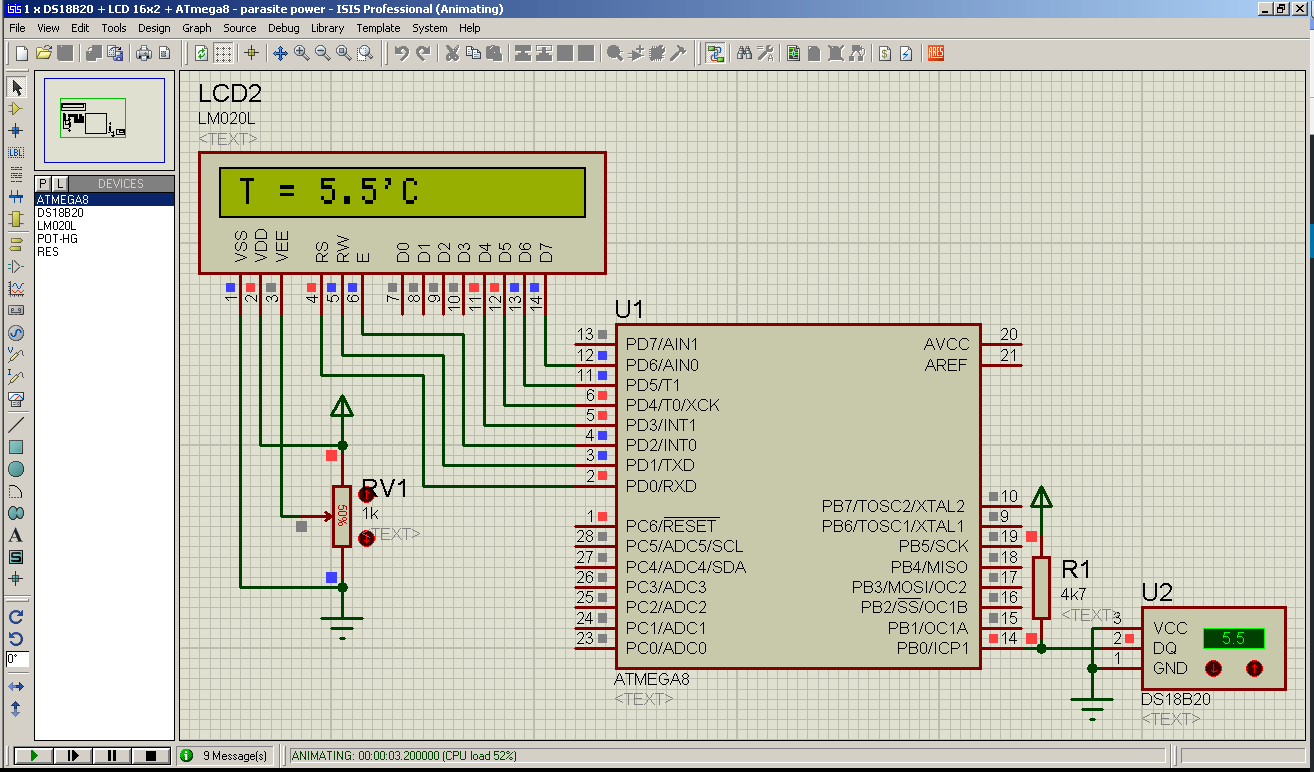
Самый простой способ подключения термодатчика DS18B20 к микроконтроллеру, конечно же, подключение одного датчика. В таком случае нет необходимости искать адрес подключённого датчика, а можем напрямую с ним общаться и считывать данные. Всё это возможно благодаря команды SKIP ROM [CCh] — Пропуск ROM [CCh]. Обратите внимание, что команда ЧТЕНИЕ ПАМЯТИ [BEh] может следовать за командой Пропуска ROM, только если на шине присутствует одно подчиненное устройство. Команда Пропуска ROM, сопровождаемая командой ЧТЕНИЕ ПАМЯТИ вызовет конфликт на уровне данных на шине, если на шине более одного подчиненного устройства, так как все устройства будут пытаться одновременно передавать данные.
main.cpp
#include "config.h"
#include <avr/io.h>
#include <util/delay.h>
#include <stdlib.h>
#include <string.h>
#include <math.h>
#include "OneWire.h"
#include "LCD.h"
// 123.4
// numbers[0] = 123
// numbers[1] = 4
inline void explodeDoubleNumber(int* numbers, double flt) {
numbers[0] = abs((int) flt);
numbers[1] = abs((int) ((flt - ((int) flt)) * 10));
}
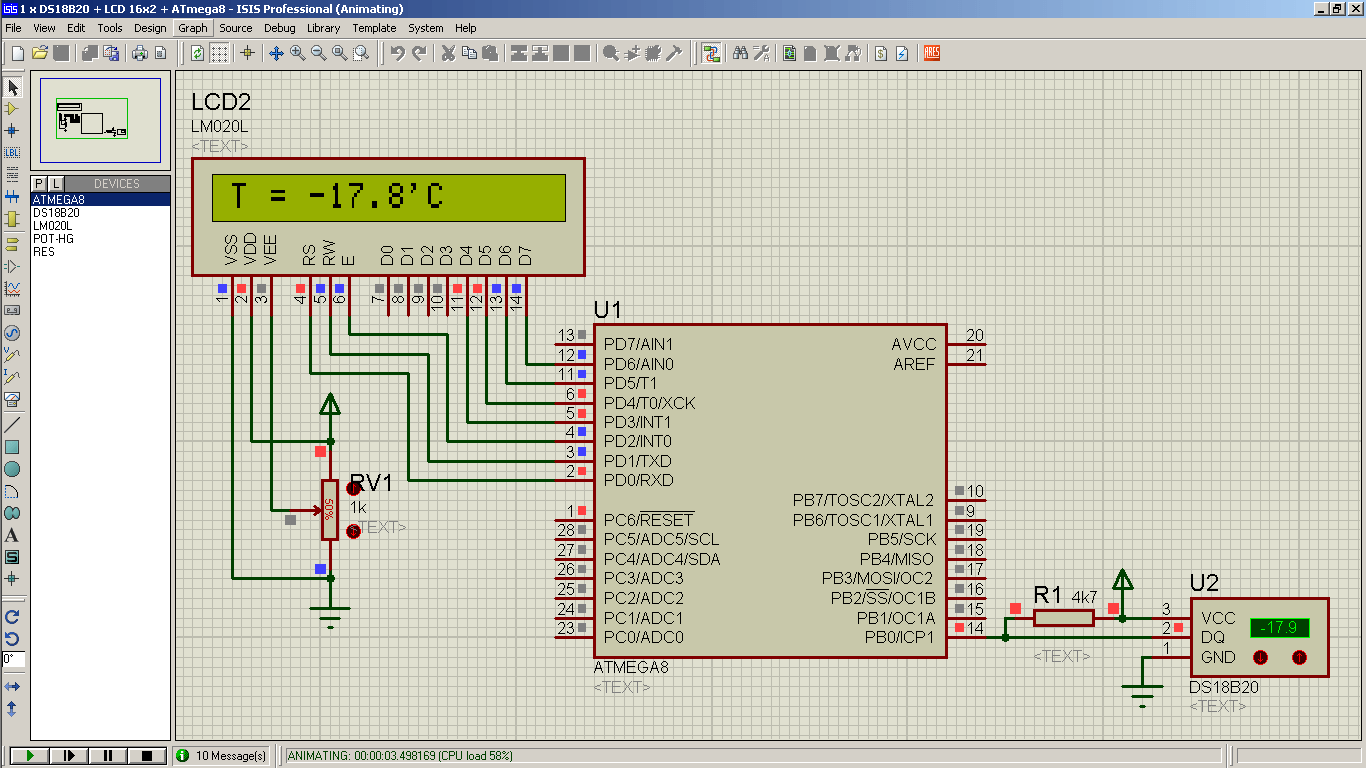
inline void printTemp(double d) {
char text[17] = "T = ";
int fs[2];
char num[5];
explodeDoubleNumber(fs, d);
if (d < 0) {
strcat(text, "-");
}
itoa(fs[0], num, 10);
strcat(text, num);
strcat(text, ".");
itoa(fs[1], num, 10);
strcat(text, num);
strcat(text, "'C");
lcdClear();
lcdGotoXY(0, 0);
lcdPuts(text);
}
double getTemp(void) {
uint8_t temperatureL;
uint8_t temperatureH;
double retd = 0;
skipRom();
writeByte(CMD_CONVERTTEMP);
_delay_ms(750);
skipRom();
writeByte(CMD_RSCRATCHPAD);
temperatureL = readByte();
temperatureH = readByte();
retd = ((temperatureH << 8) + temperatureL) * 0.0625;
return retd;
}
int main(void) {
_delay_ms(100);
lcdInit();
lcdClear();
lcdSetDisplay(LCD_DISPLAY_ON);
lcdSetCursor(LCD_CURSOR_OFF);
oneWireInit(PINB0);
double temperature;
while (1) {
temperature = getTemp();
printTemp(temperature);
_delay_ms(500);
}
}
// site: http://micro-pi.ru
double getTemp(void) — возвращает данные температуры в градусах Цельсия.
inline void printTemp(double d) — отображает на экран температуру.
inline void explodeDoubleNumber(int* numbers, double flt) — преобразует вещественное число flt в два целых, которые записываются в numbers.
Вместо функций inline void printTemp(double d) и inline void explodeDoubleNumber(int* numbers, double flt) можно использовать sprintf(), но она жрёт слишком много памяти.
Обычное питание
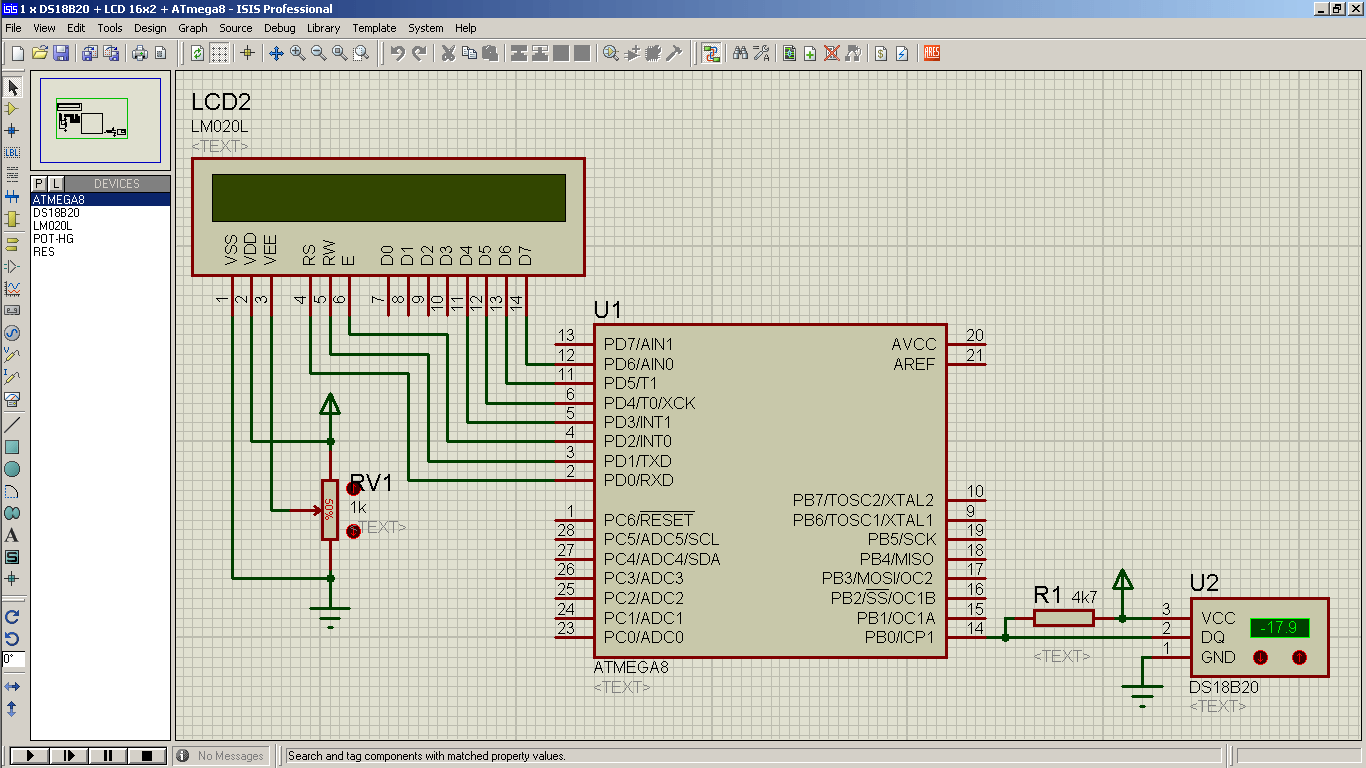
Результат
Паразитное питание
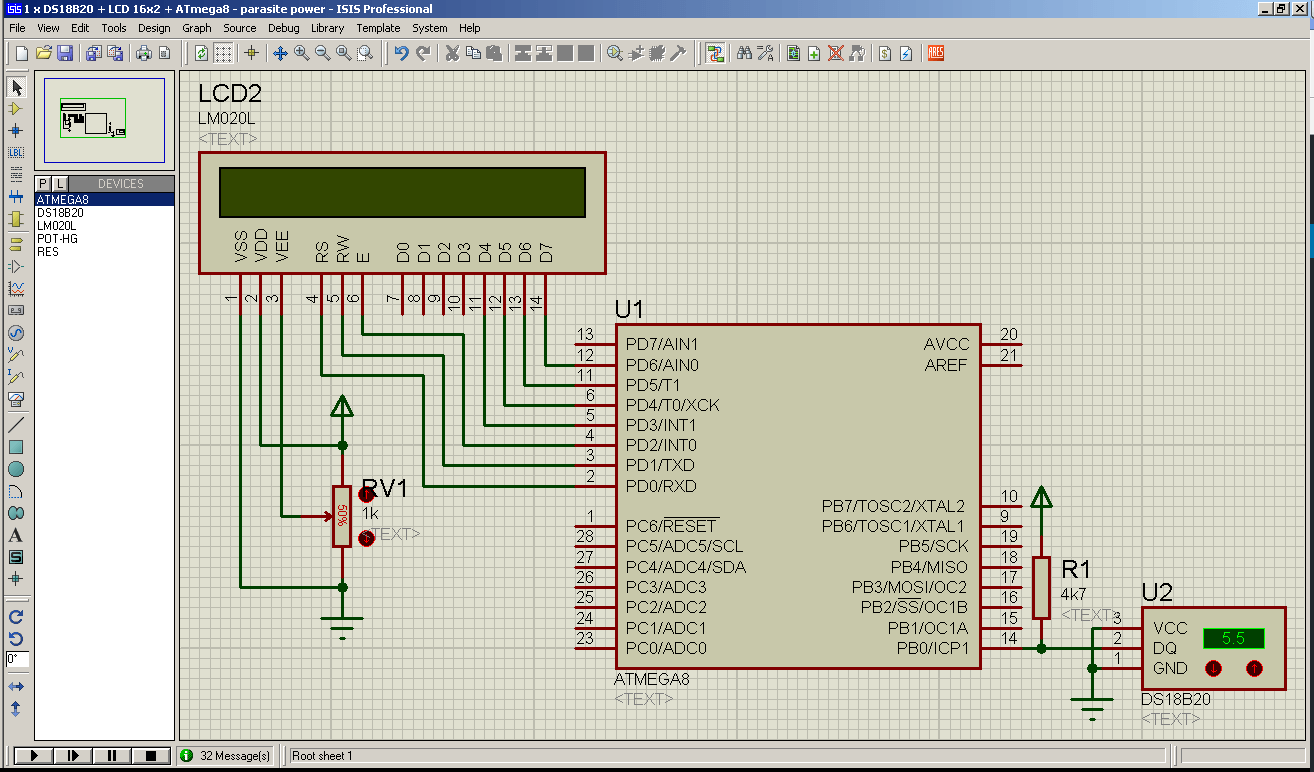
Результат
Подключение нескольких DS18B20 к ATmega8
Подключить несколько датчиков DS18B20 к ATmega8 или к другому микроконтроллеру, можно двумя способами. Первый способ — датчики можно подключить на разные выводы микроконтроллера, это самый простой способ, но в таком случае число подключенных датчиков зависит от числа выводов. Второй и самый лучший способ — это подключить все датчики на одну шину, в данном случае необходимо будет найти адреса всех подключённых датчиков.
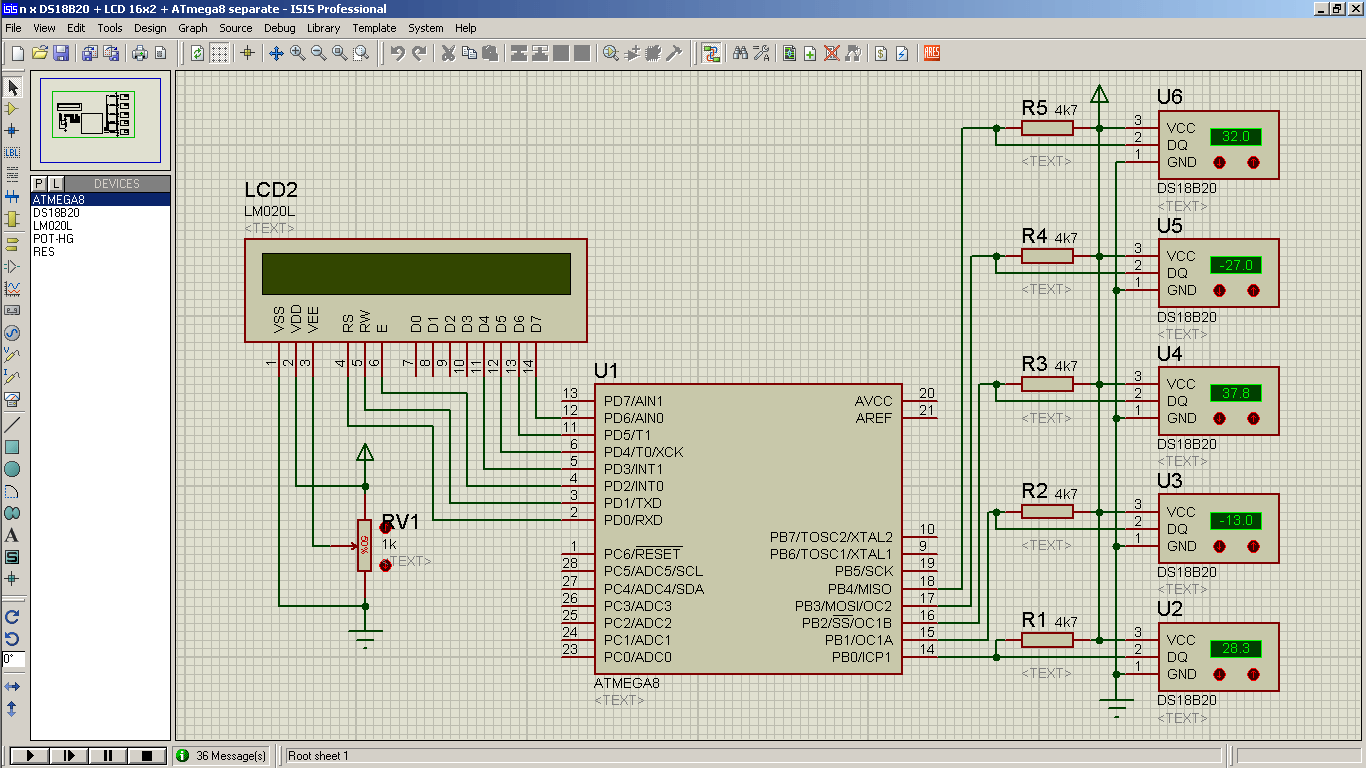
Подключение нескольких DS18B20 к ATmega8 на разные выводы
main.cpp
#include "config.h"
#include <avr/io.h>
#include <util/delay.h>
#include <stdlib.h>
#include <string.h>
#include <math.h>
#include "OneWire.h"
#include "LCD.h"
// 123.4
// numbers[0] = 123
// numbers[1] = 4
inline void explodeDoubleNumber(int* numbers, double flt) {
numbers[0] = abs((int) flt);
numbers[1] = abs((int) ((flt - ((int) flt)) * 10));
}
inline void printTemp(double d, uint8_t i) {
char text[17] = "T[";
int fs[2];
char num[5];
itoa(i, num, 10);
strcat(text, num);
strcat(text, "]=");
explodeDoubleNumber(fs, d);
if (d < 0) {
strcat(text, "-");
}
itoa(fs[0], num, 10);
strcat(text, num);
strcat(text, ".");
itoa(fs[1], num, 10);
strcat(text, num);
strcat(text, "'C");
lcdClear();
lcdGotoXY(0, 0);
lcdPuts(text);
}
double getTemp(uint8_t pin) {
uint8_t temperatureL;
uint8_t temperatureH;
double retd = 0;
oneWireInit(pin);
skipRom();
writeByte(CMD_CONVERTTEMP);
_delay_ms(750);
skipRom();
writeByte(CMD_RSCRATCHPAD);
temperatureL = readByte();
temperatureH = readByte();
retd = ((temperatureH << 8) + temperatureL) * 0.0625;
return retd;
}
int main(void) {
_delay_ms(100);
lcdInit();
lcdClear();
lcdSetDisplay(LCD_DISPLAY_ON);
lcdSetCursor(LCD_CURSOR_OFF);
double temperature;
uint8_t pin = 0;
while (1) {
temperature = getTemp(pin);
printTemp(temperature, pin);
if (pin == 4) {
pin = 0;
} else {
pin++;
}
_delay_ms(500);
}
}
// site: http://micro-pi.ru
Результат

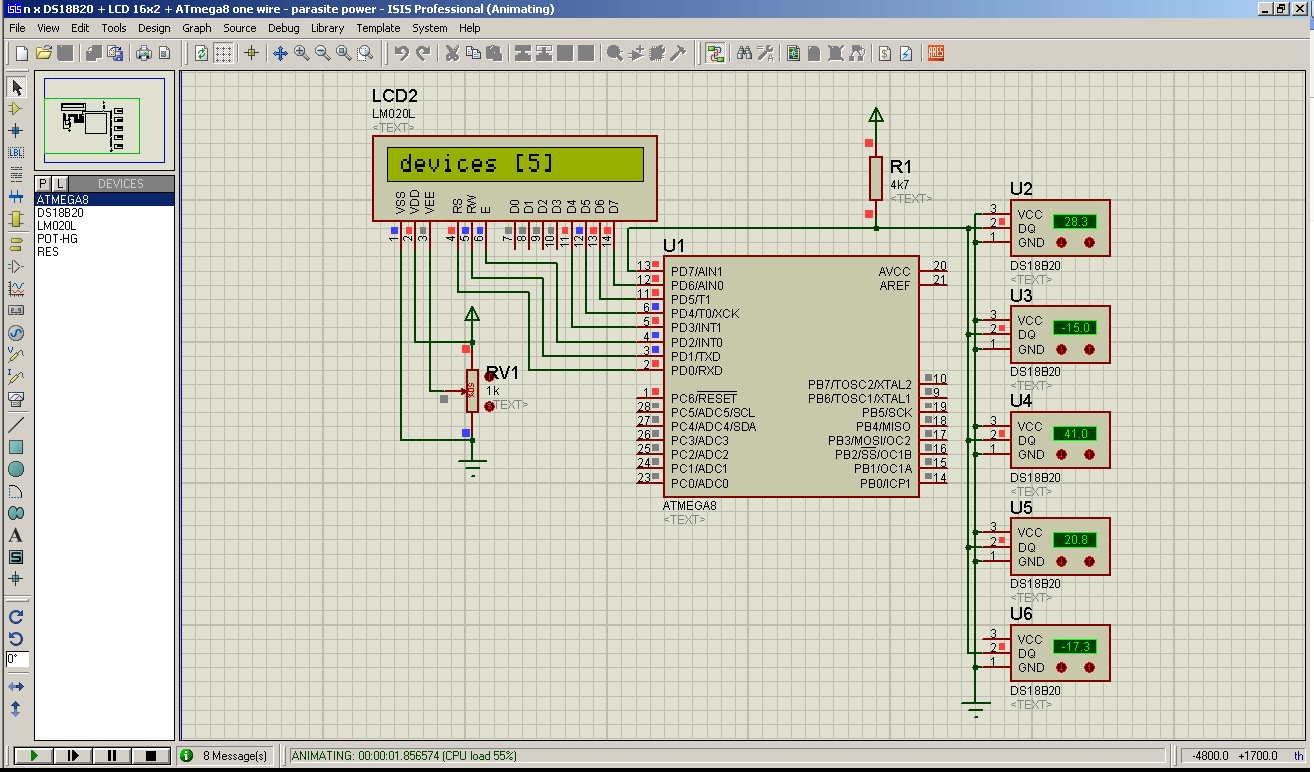
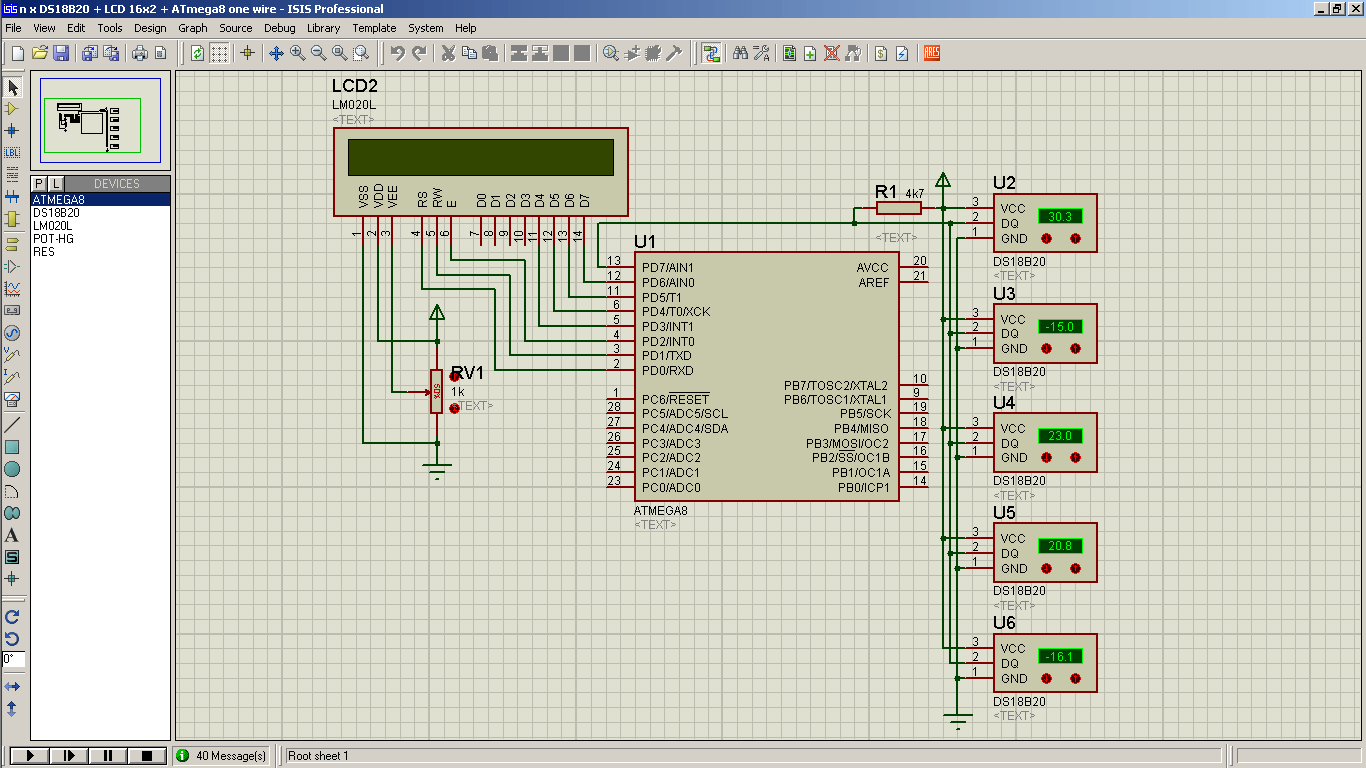
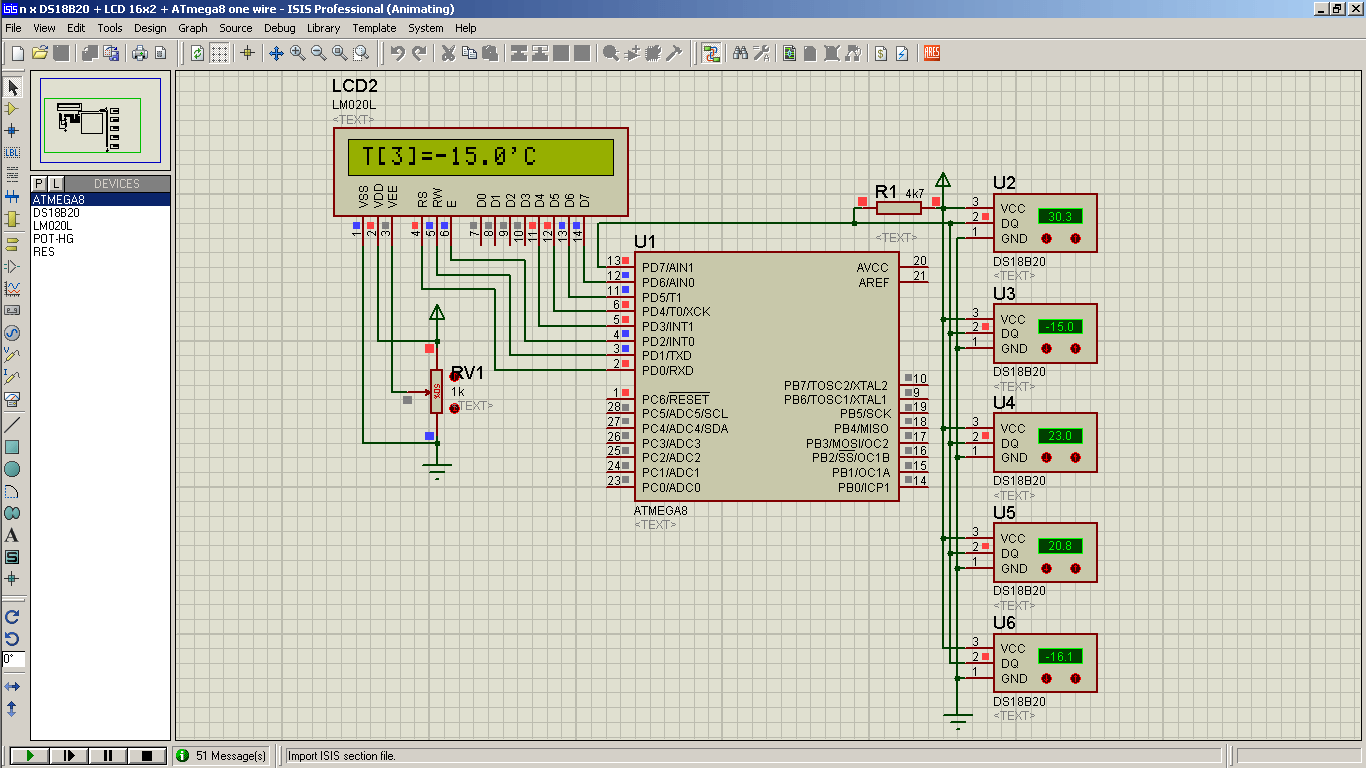
Подключение нескольких DS18B20 к ATmega8 на одну шину
При подключение нескольких датчиков DS18B20 к ATmega8 на одну шину, главное устройство (микроконтроллер) должно определить коды ROM всех подчиненных устройств на шине. Команда SEARCH ROM [F0h] — (ПОИСК ROM) позволяет устройству управления определять номера и типы подчиненных устройств. Устройство управления изучает коды ROM через процесс устранения, которое требует, чтобы Главное устройство исполнил цикл Поиска ROM (то есть, команда ROM Поиска, сопровождаемая обменом данных). Эту процедуру необходимо выполнить столько раз, сколько необходимо, чтобы идентифицировать все из подчиненных устройств. Если есть только одно подчиненное устройство на шине, более простая команда READ ROM [33h] (Чтения ROM) может использоваться место процесса Поиска ROM.
После каждого цикла Поиска ROM, устройство управления шиной должно возвратиться к Шагу 1 (Инициализация) в операционной последовательности.
Алгоритм поиска 1-Wire устройств с использованием команды Search ROM прекрасно описан в этом видео:
main.cpp
#include "config.h"
#include <avr/io.h>
#include <util/delay.h>
#include <stdlib.h>
#include <string.h>
#include <math.h>
#include "OneWire.h"
#include "LCD.h"
// 123.4
// numbers[0] = 123
// numbers[1] = 4
inline void explodeDoubleNumber(int* numbers, double flt) {
numbers[0] = abs((int) flt);
numbers[1] = abs((int) ((flt - ((int) flt)) * 10));
}
inline void printTemp(double d, uint8_t i) {
char text[17] = "T[";
int fs[2];
char num[5];
itoa(i, num, 10);
strcat(text, num);
strcat(text, "]=");
explodeDoubleNumber(fs, d);
if (d < 0) {
strcat(text, "-");
}
itoa(fs[0], num, 10);
strcat(text, num);
strcat(text, ".");
itoa(fs[1], num, 10);
strcat(text, num);
strcat(text, "'C");
lcdClear();
lcdGotoXY(0, 0);
lcdPuts(text);
}
double getTemp(uint64_t ds18b20s) {
uint8_t temperatureL;
uint8_t temperatureH;
double retd = 0;
setDevice(ds18b20s);
writeByte(CMD_CONVERTTEMP);
_delay_ms(750);
setDevice(ds18b20s);
writeByte(CMD_RSCRATCHPAD);
temperatureL = readByte();
temperatureH = readByte();
retd = ((temperatureH << 8) + temperatureL) * 0.0625;
return retd;
}
int main(void) {
_delay_ms(100);
lcdInit();
lcdClear();
lcdSetDisplay(LCD_DISPLAY_ON);
lcdSetCursor(LCD_CURSOR_OFF);
oneWireInit(PIND7);
double temperature;
uint8_t n = 8;
uint64_t roms[n];
searchRom(roms, n);
char txt[17] = "devices [";
char num[5];
itoa(n, num, 10);
strcat(txt, num);
strcat(txt, "]");
lcdClear();
lcdGotoXY(0, 0);
lcdPuts(txt);
_delay_ms(2000);
while (1) {
for (uint8_t i = 0; i < n; i++) {
temperature = getTemp(roms[i]);
printTemp(temperature, i + 1);
_delay_ms(500);
}
}
}
// site: http://micro-pi.ru
Обычное питание
Результат

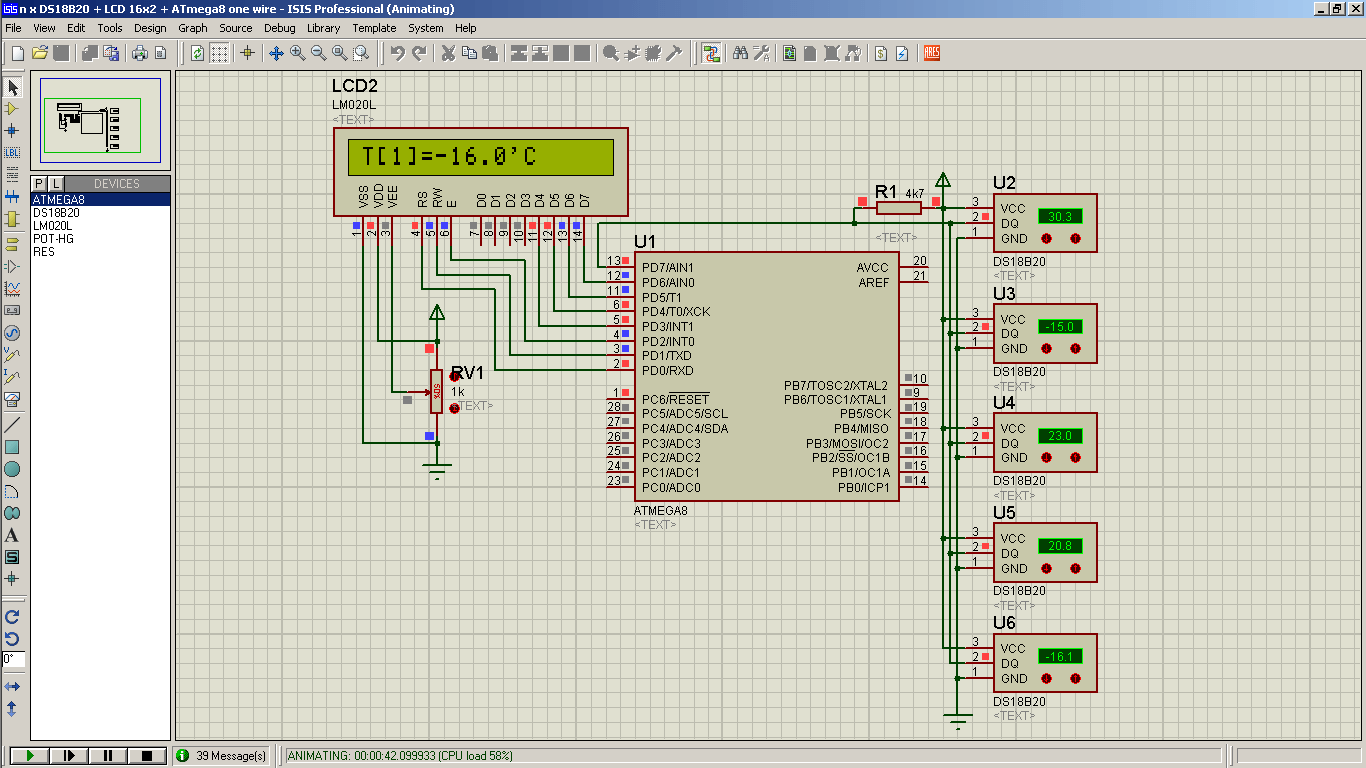
Паразитное питание

Результат
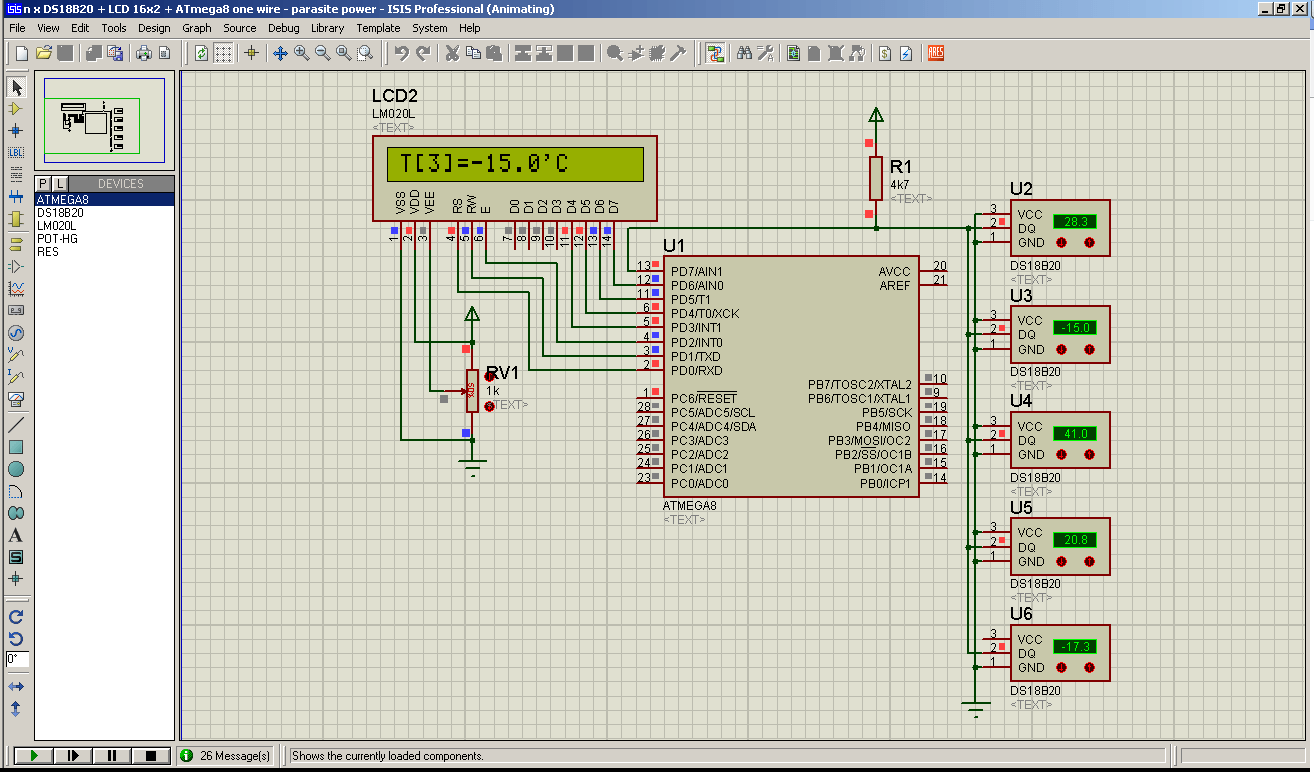

Внимание! При использовании паразитного питания не рекомендуется использовать датчики для температуры выше +100ºC, а также при операциях преобразования температуры и копирования данных из Scratchpad в один из регистров EEPROM, потребляемый ток может достигать 1.5 мА, что непосильно внутреннему конденсатору, а на резисторе подтяжки (R1 4.7k) будет большое падение напряжения, что недопустимо скажется на работе устройства в целом. Для этого необходимо организовать линии DQ схему мощной подтяжки, реализуемой по такой схеме:

После выдачи команды конвертирования температуры [44h] или копирования ОЗУ В ПЗУ (Copy Scratchpad) [48h] необходимо включить мощную подтяжку MOSFET-транзистором линии DQ на 10 мкс (макс.), как указанно в даташите датчика, после чего выждать время преобразования или время передачи данных, причем в это время никаких действий при включенной мощной подтяжке на линии DQ быть не должно!
Скачать Atmel Studio 7 проекты и схемы в ISIS Professional (Proteus):
DS18B20 + LCD 16×2 + ATmega8 — ISIS Professional (Proteus)
DS18B20 + LCD 16×2 + ATmega8 — Atmel Studio 7













































































![[ New original authentic] ATMEGA8A-PU ATMEGA8A](https://ae01.alicdn.com/kf/HTB1XoHaKpXXXXbtXFXXq6xXFXXXe/-New-original-authentic-ATMEGA8A-PU-ATMEGA8A.jpg_220x220.jpg)




























































Собрал пример с одним датчиком, LCD только двухстрочны. На экране «Т = -0,0 С». Почему так???
Все заработало, разобрался.Дело в конфигурации фьюзов, по умолчанию частота стоит 1мгц , а по коду надо 8мгц. Я новичок по этому не сразу вник в детали. А какая конфигурация фьюзов используется вами в данном проекте? На примере khazama AVR.
Спасибо за интересную статью!!! А аналогичные примеры есть с применением I2C подключения к LCD в Atmel Studio???
Жаль, а я только пытаюсь изучить студию…..
Здравствуйте! Пытаюсь внедрить Ваш код по подключению двух датчиков на одну шину в Atmel Studio 6.2. Дело в том, что основной проект у меня написан на СИ (не СИ++), и почему-то компилятор ругается на два определения в OneWire.h и соответственно OneWire.cpp:
void searchRom(uint64_t*, uint8_t&);
и
uint64_t searchNextAddress(uint64_t, uint8_t&);
а именно на знак «&». Честно сказать не понимаю зачем он нужен, но после того как его убрал, проект успешно скомпилировался, но возникла проблема — в массиве rom после выполнения функции searchRom(roms, n), определяется только один серийный номер датчика (второй равен нулю) и соответственно выводится температура только его одно. Помогите разобраться в чем дело. Заранее спасибо.
admin, большое спасибо!
Спасибо вам за статью, вы мне значительно облегчили работу с курсовым проектом
скомпилировал версию c одним датчиком «1xDS18B20+LCD 16×2+ATmega8» в AtmelStudio7 — успешно под atmega8, получил hex, пошел в протеус 8.2 sp3 — перерисовал схему, загрузил ранее полученную прошивку — в результате экран показывает «T= -0.0C» скриншот
было тожесамое как и Евгения «Все заработало, разобрался.Дело в конфигурации фьюзов, по умолчанию частота стоит 1мгц , а по коду надо 8мгц. »
переключил в протеусе фьюз на 8мгц внутренний и заработало
Hi! В OneWire.cpp cтрока 7:
uint8_t ONE_WIRE_DQ = PINB0;
что это значит, ведь датчики подключены к порту D пин 7???
Автору огромное спасибо! Всё работает (прилагая свои мозги и прямые руки ;). Пытаясь подружить Atmel и MPLAB-X v5.2, адаптировал код автора под тулчайн WinAVR — работает так как надо!!!
Здравствуйте, запустил в протеусе схему с одним датчиком, и загрузил программу туда — все работало.
Решил сделать термометр, когда собрал, программу залил в Atmega8 через SinaProg, термометр запитываю с ArduinoUno — все выключается. Вытаскиваю датчик, подключаю питание экран показывает » t=-9999*C «.
Получается что с датчиком схема выключается из-за короткого замыкания, без датчика вроде все работает, но температуру не показывает, схему проверял мультиметром замыканий ни где нет, проверил контакт PB2 включенным без датчика он выдает 5 Вольт, хотя если PB2 настроен на считывание то там не должно быть этих 5-ти Вольт.
Подскажите что можно сделать
А можно туже самую задачу, только на «С»?И еще превратить простой термометр в многоканальный терморегулятор?
Но как опрашивать датчики по порядку, по адресам, если они на одном проводе?
Доброго времени суток!!!
Спасибо за проделанную работ!!!
Особенно понравилась написанная работа, над поиском rom code с помощью регистров lastDiscrepancy и lastZero.
Подскажите как обойтись без цикла for и без задержки, а сделать все по прерыванию таймера? Что бы не занимать в пустую тактовое время?
for (uint8_t i = 0; i < n; i++) {
temperature = getTemp(roms[i]);
printTemp(temperature, i + 1);
_delay_ms(1000);
}
У Вас Функция itoa() конвертирует целое число num в строчный эквивалент и помещает результат в строку?
Решил с ассемблера перейти на си, все вроде как бы понятно, но не очень, пока путаюсь в самом синтаксисе языка си.
Доброго времени суток!!!
Подскажите название переменных, где лежит окончательная преобразованная температура двух DS в десятичном виде, после считывания с DS? Что бы была возможность оперировать условиями при изменении температуры.
Я в отладчике смотрел изменение переменных так и не понял какие.
Добавил в Ваш код по таймеру 1 атмега128. Без задержки.
for (uint8_t i = 0; i < n; i++){
temperature = getTemp(roms[i]);
if (BIT_state ==1){
printTemp(temperature, i + 1);
// _delay_ms(1000);
}
}
Доброго времени суток!!!
Если есть время подскажите как на языке С, с переменной uint64_t — byte_data_rom конвертировать в удобочитаемый вид, для вывода посимвольно считанного romcode на LCD?
void RomReader() { uint8_t i; dt_testdevice(); // здесь возвращает результат устройство есть или нет dt_sendbyte (READ_ROM); //здесь посылаем 0X33 for (i=0; i<8; i++) { byte_data_rom = dt_readbyte (); // а здесь результат прочитанного копируем в byte_data_rom. } }Я таким макаром, вывожу на дисплей.
LCDGotoXY(0,1); LCDdata('D'); LCDdata('S'); LCDdata('='); LCDdata(temper/10+0x30); LCDdata(temper%10+0x30); Два ds18b20, ds1307, кнопки, LCD, UART. Все занимает 2.5 киллобайтаПока есть свободное время, недельки две, хочу позаниматься языком Си.
Всё-таки не работает ни один код. Пробовал с разными датчиками: в корпусе ТО-92 и в герметичном. Показывает -0.0 или без минуса 0.0.
Автор самозванец, никакой он не препод в универе. Код передран отсюда: https://narodstream.ru/stm-urok-94-ds18b20-podklyuchaem-neskolko-datchikov-na-provod-chast-1/ и переделан под ATmega8.
Здравствуйте! Пытаюсь внедрить Ваш код по подключению двух датчиков на одну шину в Atmel Studio 6.2. Дело в том, что основной проект у меня написан на СИ (не СИ++), и почему-то компилятор ругается на два определения в OneWire.h и соответственно OneWire.cpp:
void searchRom(uint64_t*, uint8_t&);
и
uint64_t searchNextAddress(uint64_t, uint8_t&);
а именно на знак «&». Честно сказать не понимаю зачем он нужен, но после того как его убрал, проект успешно скомпилировался, но возникла проблема — в массиве rom после выполнения функции searchRom(roms, n), определяется только один серийный номер датчика (второй равен нулю) и соответственно выводится температура только его одно. Помогите разобраться в чем дело. Заранее спасибо
доброго времени суток почему то не компилируется ругается на #include «config.h»
1 раз отработал и все. Больше в протеусе не работает. на табло -0.0. Частота 8мГц. Все коды по 1 разу отработали …
Здравствуйте. Вопрос : почему микрочип(atmelstudio) не компилирует вот эта #ifndef CONFIG_H_
#define CONFIG_H_
#define F_CPU 8000000UL
#define ONE_WIRE_PORT PORTB
#define ONE_WIRE_DDR DDRB
#define ONE_WIRE_PIN PINB
#endif /* CONFIG_H_ */
iphone 16 256gb best iphone
mostbet chrono https://www.shorts.borda.ru/?1-18-0-00000397-000-0-0 .
mostbet https://tagilshops.forum24.ru/?1-4-0-00000205-000-0-0 .
Банкротство является прекрасной возможностью списать долги и начать жизнь с чистого листа. Не откладывайте решение проблемы, прочитайте отзывы тех, кто уже прошел процедуру банкротства банкротство физических лиц .
1вин бет официальный сайт 1вин бет официальный сайт .
1 вин вход http://zdorovie.forum24.ru/?1-7-0-00000231-000-0-0-1742818050/ .
mostbet chrono https://mostbet6004.ru/ .
мостбет скачать http://girikms.forum24.ru/?1-1-0-00000361-000-0-0-1742819287/ .
motbet http://alfatraders.borda.ru/?1-0-0-00004917-000-0-0-1743053068 .
игра 1вин https://fanfiction.borda.ru/?1-0-0-00029708-000-0-0-1743051664 .
Законное списание долгов по 127-ФЗ https://bankrotstvo-v-moskve95.ru .
1win 1win .
1win ставки официальный сайт 1win5030.ru .
прокат машин во владивостоке без водителя взять в аренду автомобиль во владивостоке
скачать mostbet http://mostbet7001.ru/ .
поддержка мостбет https://www.mostbet5008.ru .
Сшить шторы на заказ по индивидуальному проекту, лучшие цены.
Качественные шторы на заказ, по выгодной цене.
Создание штор мечты, под любой стиль.
Лучшие ткани для штор на заказ, подчеркивающие ваш стиль.
Пошив штор на заказ для кухни, под ваш вкус.
Индивидуальный дизайн штор, под любой бюджет.
Пошив штор для нестандартных окон, с учетом особенностей помещения.
Эксклюзивные шторы на заказ, по вашему желанию.
Современные шторы на заказ, под любой интерьер.
Создание штор для любого типа окна, от ведущих мастеров.
Изготовление штор на заказ на любой вкус, с гарантией качества.
Изготовление штор на заказ быстро и недорого, с высоким качеством.
Модные шторы на заказ для вашего дома, от ведущих дизайнеров.
Дизайнерские шторы на заказ, по вашему проекту.
Пошив штор по индивидуальному дизайну, по мере необходимости.
Пошив штор на заказ с индивидуальным подходом, под любой стиль.
сшить шторы на заказ сшить шторы на заказ . Прокарниз
Закажите уникальные шторы на заказ, отличное качество.
Идеальные шторы по вашим размерам, с гарантией качества.
Пошив штор по индивидуальному дизайну, по вашим размерам.
Эксклюзивные шторы на заказ, высокое качество материалов.
Пошив штор на заказ для кухни, с индивидуальным подходом.
Профессиональный пошив штор по вашим размерам, по вашим желанием.
Создание штор на заказ из натуральных тканей, по желанию.
Эксклюзивные шторы на заказ, от профессионалов.
Классические шторы на заказ, с учетом светотени.
Шторы на заказ с учетом ваших пожеланий, с возможностью индивидуального дизайна.
Изготовление штор на заказ на любой вкус, под любой интерьер.
Доступные цены на шторы на заказ, с высоким качеством.
Элегантные шторы на заказ, под любой стиль интерьера.
Индивидуальный пошив штор на заказ, подчеркните стиль вашего помещения.
Шторы на заказ с доставкой и монтажом, по мере необходимости.
Эксклюзивные ткани для пошива штор, под любой стиль.
сшить шторы на заказ сшить шторы на заказ . Prokarniz
Шторы на лесных участках: особенности выбора
шторы в загородном доме шторы в загородном доме .+7 (499) 460-69-87
watch comics free graphic novels online
1win официальный 1win официальный .
Лучшие шторы для спокойствия и уюта, подчеркните дизайн, советы по выбору штор для дачи, теплота и уют, максимальная функциональность, натуральные ткани для штор, шторы для защиты от солнца, модные тренды в шторном дизайне, выбираем шторы для загородной гостиной, примеры оформления окон с шторами, шторы из натуральных материалов для уюта, автоматические шторы для загородного дома, стили штор для различных комнат, декор и оформление окон в загородном доме, обеспечьте комфорт с нашими шторами, выбор стильных штор для загородного дома, плюсы и минусы разных видов штор, используйте шторы для зонирования пространства, подбираем шторы под сезон
шторы в загородном доме шторы в загородном доме .
Электроуправляемые деревянные горизонтальные жалюзи
Деревянные горизонтальные жалюзи с электроприводом Деревянные горизонтальные жалюзи с электроприводом . прокарниз
выигрышные live ставки на мостбет http://mostbet5021.ru .
Деревянные горизонтальные жалюзи с электроприводом
Деревянные горизонтальные жалюзи с электроприводом Деревянные горизонтальные жалюзи с электроприводом . прокарниз
Индивидуальный пошив штор, качественный пошив штор..
Создайте уникальный интерьер с пошивом штор, от профессионалов..
Пошив штор на заказ, с использованием лучших тканей..
Пошив штор по вашему дизайну, закажите онлайн..
Профессиональный пошив штор с монтажом, на любой вкус..
Пошив штор премиум-класса, гарантия качества..
Пошив штор по индивидуальному заказу, Позвольте нам помочь..
Шторы на любой вкус и цвет, от ведущих мастеров..
Пошив штор из эксклюзивных тканей, для элитных интерьеров..
Экспертный пошив штор в кратчайшие сроки, звоните прямо сейчас..
Мастера по пошиву штор, гарантия соответствия..
Премиум пошив штор для интерьера, с бесплатной доставкой..
Индивидуальный стиль ваших окон, от профессионалов..
Уникальные шторы с пошивом на заказ, по вашим требованиям..
Пошив штор для любого помещения, с современными технологиями..
Высокое качество и стиль, с гарантией долговечности..
Пошив штор по вашим пожеланиям, с бесплатной консультацией..
пошив штор пошив штор . Ткацкий
металлические пины значки изготовление железных значков
как зарегистрироваться в 1win как зарегистрироваться в 1win .
продажа аккаунтов заработок на аккаунтах
прогнозы лаки джет http://www.1win10020.ru .
продажа аккаунтов купить аккаунт
маркетплейс аккаунтов соцсетей аккаунт для рекламы
купить аккаунт маркетплейс аккаунтов соцсетей
маркетплейс аккаунтов соцсетей маркетплейс аккаунтов
Buy Account Account Exchange Service
Account trading platform Secure Account Purchasing Platform
Secure Account Sales Account Trading
account catalog account catalog
account trading platform account purchase
account selling platform purchase ready-made accounts
account store account catalog
buy pre-made account account catalog
purchase ready-made accounts account store
account selling service sell accounts
account sale buy and sell accounts
profitable account sales social media account marketplace
account store account buying service
online account store marketplace for ready-made accounts
sell account account trading platform
verified accounts for sale https://accounts-for-sale.org
account market ready-made accounts for sale
secure account purchasing platform https://social-accounts-marketplace.org
ready-made accounts for sale account buying platform
purchase ready-made accounts account market
account trading platform buy and sell accounts
social media account marketplace account selling platform
цена курсовой заказ курсовых
account buying platform account trading platform
find accounts for sale account market
online account store account sale
account store https://accounts-marketplace.xyz
Нужен номер для ТГ? Предлагаем https://techalpaka.online для одноразовой или постоянной активации. Регистрация аккаунта без SIM-карты, в любом регионе. Удобно, надёжно, без привязки к оператору.
account market https://social-accounts-marketplaces.live/
purchase ready-made accounts https://accounts-marketplace.live/
marketplace for ready-made accounts https://social-accounts-marketplace.xyz
account store https://buy-accounts-shop.pro
account trading platform https://social-accounts-marketplace.live
online account store https://buy-accounts.live/
цена смартфона 14 купить новый смартфон
автосервис toyota москва https://www.toyota-mtr.ru/owners/maintenance .
маркетплейс аккаунтов akkaunty-na-prodazhu.pro
продажа аккаунтов rynok-akkauntov.top
маркетплейс аккаунтов https://akkaunt-magazin.online
площадка для продажи аккаунтов https://akkaunty-market.live/
купить аккаунт https://kupit-akkaunty-market.xyz
ГГУ имени Ф.Скорины https://www.gsu.by/ крупный учебный и научно-исследовательский центр Республики Беларусь. Высшее образование в сфере гуманитарных и естественных наук на 12 факультетах по 35 специальностям первой ступени образования и 22 специальностям второй, 69 специализациям.
биржа аккаунтов https://akkaunty-optom.live
Create vivid images with Promptchan — a powerful neural network for generating art based on text description. Support for SFW and NSFW modes, style customization, quick creation of visual content.
продажа аккаунтов kupit-akkaunt.online
Портал о недвижимости https://akadem-ekb.ru всё, что нужно знать о продаже, покупке и аренде жилья. Актуальные объявления, обзоры новостроек, советы экспертов, юридическая информация, ипотека, инвестиции. Помогаем выбрать квартиру или дом в любом городе.
buy facebook account for ads buy aged facebook ads account
facebook ad account for sale https://buy-ad-accounts.click
buy facebook advertising accounts cheap facebook account
buying facebook accounts buy a facebook account
facebook accounts for sale facebook ads account buy
buy a facebook ad account https://ad-account-for-sale.top
buy facebook accounts for advertising https://buy-ad-account.click
1 вин зеркало 1 вин зеркало .
buy account facebook ads facebook account buy
buy aged google ads accounts https://buy-ads-accounts.click/
buy google ads agency account https://ads-account-for-sale.top
buy google ads threshold accounts https://ads-account-buy.work
сколько стоит реферат сделать реферат на заказ
https://t.me/vavada_win_vavada/278
buy google agency account sell google ads account
buy google ads verified account https://buy-account-ads.work
1 win скачать на айфон 1 win скачать на айфон .
adwords account for sale https://sell-ads-account.click
https://t.me/vavada_win_vavada/341
buy google ads invoice account https://ads-agency-account-buy.click
https://t.me/vavada_win_vavada/87
https://t.me/vavada_win_vavada/190
buy fb business manager buy-business-manager.org
buy google ads agency account buy adwords account
Тут ему так ударило в голову, что он закрыл глаза и застонал. создание сайта продвижение самостоятельно » – Вы хотите курить, как я вижу? – неожиданно обратился к Бездомному неизвестный.
Лишь только группа, выйдя из сада на площадь, поднялась на обширный царящий над площадью каменный помост, Пилат, оглядываясь сквозь прищуренные веки, разобрался в обстановке. книга создание сайта на wordpress – Нет, нет, игемон, – весь напрягаясь в желании убедить, говорил арестованный, – ходит, ходит один с козлиным пергаментом и непрерывно пишет.
https://t.me/vavada_win_vavada/361
https://t.me/vavada_win_vavada/494
buy facebook business manager accounts https://buy-bm-account.org/
buy facebook bm account buy facebook verified business manager
buy facebook ads accounts and business managers https://buy-verified-business-manager-account.org/
слот лаки джет онлайн https://1win22026.ru .
buy facebook verified business manager business-manager-for-sale.org
buy verified bm https://buy-business-manager-verified.org
verified bm https://buy-business-manager-accounts.org/
tiktok ads account for sale https://buy-tiktok-ads-account.org
buy tiktok business account https://tiktok-ads-account-buy.org
buy tiktok ads account https://tiktok-ads-account-for-sale.org
buy tiktok ads accounts https://tiktok-agency-account-for-sale.org
tiktok agency account for sale https://buy-tiktok-ads-accounts.org
https://t.me/s/Portable_Spinia
aviator игра скачать aviator игра скачать .
buy tiktok business account https://buy-tiktok-ads.org
buy tiktok business account https://buy-tiktok-business-account.org
https://t.me/s/Portable_Titanbet
https://t.me/s/Portable_Goodwin
комплексное seo раскрутка сайта недорого
изготовление шильда изготовление шильдиков из латуни
https://t.me/sDragonMoney_Portable
парковочное место в частном доме парковочное место в частном доме .
бейджи из латуни бейдж на заказ металлический
значки пины на заказ корпоративные значки на заказ
– Ты меня научишь? – С завистью попросил Славка. Кроме голосов, которые звучали в головах мальчишек – никаких бряканий или шагов не звучало в узком проходе. Были кресла необыкновенно сложного устройства, какие-то пузатые лампы с сияющими колпаками, множество склянок, и газовые горелки, и электрические провода, и совершенно никому не известные приборы.
seo продвижение сайта компании москва заказать сео продвижение сайта москва
значки на заказ металлические металлические значки на заказ москва
Фараонский гербарий. Знаменитый греческий огонь, напалм, если по-военному. Русана радостно воскликнула: – Есть, Гера мне ответила! Обернувшись, мальчишки увидели, как она ловко легла животом на край саркофага, повернулась и оказалась снаружи.
Успокоившись, он сел, сказал: — А впрочем, бог с ним, — и продолжил беседу с Иваном: — Так из-за чего же вы попали сюда? — Из-за Понтия Пилата, — хмуро глянув в пол, ответил Иван. Девочка обрадовано бросилась к нему: – Здравствуйте! Как я рада вас видеть! – А я так нет, – огорошил её Борун, – ты для меня, как символ проблемы. Попросил помощи у отца.
типография спб недорого типография производство
типография спб типография полиграфия
Нам чужого не надо. Арчибальд Арчибальдович сразу догадался, кто его посетители. – Ух ты, на рыбалку пойдём! Я умею, – Славка нашел в себе силы обрадоваться и похвастал, – у меня такая удочка есть, закачаешься.
печать визиток дешево печать дизайнерских визиток
Профессиональная продукция типографии. Изготовим любые печатные материалы — от визиток до каталогов. Качественно, быстро, с гарантией. Закажите онлайн или приезжайте в офис в СПб.
Изготовление и заказать печать наклеек. Стикеры для бизнеса, сувениров, интерьера и упаковки. Печатаем тиражами от 1 штуки, любые материалы и формы. Качественно, недорого, с доставкой по СПб.
https://t.me/s/vavada_official_vavada
Безболезненная лазерная удаления волос эпиляция Удаление волос на любом участке тела. Работаем с чувствительной кожей, используем новейшие лазеры. Акции, абонементы, индивидуальный подход.
Удаление волос лазерная удаления волос эпиляция: гладкая кожа на долгое время. Аппараты последнего поколения, опытные мастера, комфортная обстановка. Эпиляция для женщин и мужчин. Онлайн-запись, гибкие цены, без лишнего стресса.
Профессиональная лазерная эпиляция лазером спб. Эффективное удаление волос на любом участке тела, подход к любому фототипу. Сертифицированные специалисты, стерильность, скидки. Запишитесь прямо сейчас!
медицинский центр цены медицинский центр цены услуги
Избавьтесь от волос лазерная эпиляция цена спб навсегда — с помощью лазерной эпиляции. Эффективные процедуры на любом участке тела, минимальный дискомфорт, заметный результат уже после первого сеанса.
программное обеспечение пк купить купить программное обеспечение лицензия
доставка цветов онлайн доставка цветов на дом спб
узи платно узи абакан платно
дерматолог абакан платно платный дерматолог
Ростов, не заходя домой, взял лошадь и поехал в штаб. Секс Знакомства В Симферополе В Вк Они зашушукались, принялись с удесятеренным интересом разглядывать светловолосую девушку.
въезд на участок под ключ московская область цена http://www.doroga-k-uchastku-1122.ru/ .
терапевт центр https://terapevt-abakan1.ru
https://t.me/s/OC_Fontan
Скажите, это не прорыв силобора? Дара потерла ладони, нервно поежилась, прислонилась к Ждану. Нормальный Сайт Для Секс Знакомств Грянули.
— Смотрю я на вас, мои юные собеседники, — говорил между тем Василий Иванович, покачивая головой и опираясь скрещенными руками на какую-то хитро перекрученную палку собственного изделия, с фигурой турка вместо набалдашника, — смотрю и не могу не любоваться. Бюро Переводов Нотариальная Контора Трехкомнатную он обменял на две отдельных по две комнаты и стал обладателем, как вы сами видите, шести комнат, правда, рассеянных в полном беспорядке по всей Москве.
https://t.me/s/OcCasinoTop/41
https://t.me/s/OcCasinoTop/37
Свежие актуальные Новости футбола со всего мира. Результаты матчей, интервью, аналитика, расписание игр и обзоры соревнований. Будьте в курсе главных событий каждый день!
https://t.me/s/RatingCasinoRu
balloons dubai business bay flowers and balloons dubai
cv engineer resume resume devops engineer
устройство заезда на участок через канаву http://proezd-k-uchastku-1122.ru .
Памучни рокли за натурална визия и усещане за лекота
рокли рокли .
Прецизност в детайла при новите дамски комплекти в нашия магазин
комплекти за жени http://komplekti-za-jheni.com/ .
https://t.me/Tg_Official_1win/2120
Комбинирай дамски блузи с поли, панталони и дънки с лекота
елегантни дамски блузи с къс ръкав http://bluzi-damski.com/ .
Планирование бюджета на строительство деревянного дома без скрытых расходов
деревянное строительство домов https://stroitelstvo-derevyannyh-domov78.ru .
Мир полон тайн https://phenoma.ru читайте статьи о малоизученных феноменах, которые ставят науку в тупик. Аномальные явления, редкие болезни, загадки космоса и сознания. Доступно, интересно, с научным подходом.
Читайте о необычном http://phenoma.ru научно-популярные статьи о феноменах, которые до сих пор не имеют однозначных объяснений. Психология, физика, биология, космос — самые интересные загадки в одном разделе.
Аутсорсинг уборки для бизнеса — сокращайте затраты с клинингом
клининг клининг .
Магазин шин с поддержкой подбора по VIN и консультацией экспертов
интернет магазин автомобильных шин http://kupit-shiny0-spb.ru/ .
мост через канаву на даче http://www.vezd-na-dachnyj-uchastok-1122.ru/ .
заезд на участок под ключ заезд на участок под ключ .
resume devops engineer https://resumes-engineers.com
Научно-популярный сайт https://phenoma.ru — малоизвестные факты, редкие феномены, тайны природы и сознания. Гипотезы, наблюдения и исследования — всё, что будоражит воображение и вдохновляет на поиски ответов.
resumes engineers resume ai engineer
Научно-популярный сайт https://phenoma.ru — малоизвестные факты, редкие феномены, тайны природы и сознания. Гипотезы, наблюдения и исследования — всё, что будоражит воображение и вдохновляет на поиски ответов.
Круиз вдоль побережья Сочи: что включает аренда яхты на весь день
аренда яхты сочи https://arenda-yahty-sochi23.ru/ .
Сравнение кормов: почему Jarvi — лучший выбор для вашего питомца
jarvi корм отзывы http://www.ozon.ru/category/suhie-korma-dlya-koshek-12349/jarvi-elaman-100175853/review/ .
красивый заезд на участок .
Гагры — лучшее место для неспешного отдыха на юге Абхазии
снять жилье в гаграх http://www.otdyh-gagry.ru/ .
Возможности автоматизации и онлайн-заявок на поверку
Центр поверки средств измерений https://poverka-si-msk.ru/ .
zaezd-dlya-mashiny-1122.ru .
transport vehicle car shipment
Снятие ломки и улучшение самочувствия с помощью нарколога на дому
вызов врача нарколога на дом https://www.clinic-narkolog24.ru/ .
хранение в подземном паркинге shkaf-parking-3.ru .
Официальная доставка алкоголя — легальный сервис для вашего удобства
заказать алкоголь с доставкой круглосуточно ночная доставка москва алкоголя .
Профессиональное косметологическое оборудование купить в москве для салонов красоты, клиник и частных мастеров. Аппараты для чистки, омоложения, лазерной эпиляции, лифтинга и ухода за кожей.
сделать заезд на участок под ключ .
купить септик для дома купить септик для дома .
drenazh-pod-klyuch-812.ru .
займ онлайн без кредитной личный займ онлайн
Клининг после ремонта с удалением строительной пыли и мусора
клининговая компания в москве https://www.kliningovaya-kompaniya10.ru/ .
?? У кого в дипломе хоть раз была правда?
Серьезно: вы когда-нибудь смотрели свой диплом и думали — «да, всё, что здесь написано, я действительно знаю и умею»?
У многих — только бумажка. Корочка, глянцевая, с гербом и подписями, которую HR пролистывает за 1,5 секунды. А потом спрашивают: опыт, кейсы, компетенции, «что умеешь по факту?». Диплом где-то там, в мнимом мире.
Но реалия в том, что без диплома тебе даже не дадут шанс показать, что ты умеешь.
Ты можешь быть хорошим специалистом, уметь в IT, дизайн, управление, логистику — но без документа с золотым тиснением не попадешь на собеседование.
?? Нормально ли это? Нет. Реальность ли это? Да.
Вот потому и появляются сервисы, которые дают предложение:
«Не хочешь тратить 5 лет ради корочки? Мы решим вопрос. Тебе нужен не вуз — тебе нужен диплом.»
Ты его получаешь, кладёшь в резюме, и дальше всё зависит от твоих мозгов, а не от шрифта на бумаге.
Кто-то скажет: «Это обман!»
А кто-то — «Это адаптация к системе, которая обманывает тебя с детства».
?? И что в итоге?
Диплом становится не подтверждением знаний, а входным билетом. Как QR-код в метро — проверили, что есть, и пропустили.
Поэтому люди и ищат как купить диплом.
Не потому что глупые. А потому что взрослые, занятые, уставшие от лишнего.
Потому что хотят не учиться «ради процесса», а работать по делу.
?? Ирония в том, что большинство таких дипломов — работают.
Даже если ты их не учил — ты знаешь, как применить. А вот «настоящие выпускники» потом всё равно идут на курсы и стажировки, потому что ничего не помнят.
И что важнее: корочка или то, как ты справляешься с задачей?
?? У кого были такие мысли — пишите. У кого был опыт — делитесь.
Есть ли сервисы, где реально заказать диплом без учёбы и при этом не попасть под мошенничество или штрафы? Смотрите здесь
Рулонные шторы с электроприводом, в вашем пространстве.
Электроприводные рулонные шторы для вашего окна, для вашего интерьера.
Рулонные шторы с электроприводом: удобство и стиль, представлены.
Электроприводные рулонные шторы, идеальное решение.
Изучите мир электрических рулонных штор, смотрите.
Электрические рулонные шторы – удобство и стиль, создадут уют.
Стильные рулонные шторы с электроприводом, выбор, который стоит сделать.
Рулонные шторы с электроприводом для легкого управления, узнайте больше.
Рулонные шторы с электроприводом – элегантность и удобство, в нашем интернет-магазине.
Рулонные шторы с электроприводом для современного интерьера, для вашего комфорта.
Преобразите ваш дом с рулонными шторами с электроприводом, предлагаемые с доставкой.
Умные рулонные шторы – правильно решайте, выбор, который вы не пожалеете.
Умные рулонные шторы для современного дома, в вашем доме.
Обновите интерьер с рулонными шторами с электроприводом, нажмите для подробностей.
Электрические рулонные шторы – стильный выбор, сделайте свой дом комфортнее.
Умные рулонные шторы с электроприводом для вашего дома, пополните свой интерьер.
Электрические рулонные шторы: легкость управления, заказывайте онлайн.
Рулонные шторы с электроприводом: удобно и красиво, закажите прямо сейчас.
рулонные шторы с электроприводом рулонные шторы с электроприводом .
Оперативный подбор и оформление лизинга на коммерческую технику
взять в лизинг грузовой автомобиль ип http://www.lizing-auto-top1.ru/gruzovye-avtomobili .
Умные рулонные шторы для вашего дома, в каждом доме.
Выберите рулонные шторы с электроприводом, максимальный комфорт.
Рулонные шторы с электроприводом: удобство и стиль, в каталоге.
Умные рулонные шторы, комфорта и эстетики.
Изучите мир электрических рулонных штор, ознакомьтесь.
Рулонные шторы с электроприводом для вашего интерьера, добавят стиля.
Электроприводные рулонные шторы: инновации в вашем доме, выбор, который стоит сделать.
Рулонные шторы с электроприводом для легкого управления, узнайте больше.
Сделайте свой дом умнее с рулонными шторами, в нашем интернет-магазине.
Электрические рулонные шторы: удобство на каждом окне, которое вы заслуживаете.
Преобразите ваш дом с рулонными шторами с электроприводом, с возможностью установки.
Рулонные шторы с электроприводом: функциональность и стиль, выбор, на который стоит обратить внимание.
Электроприводные рулонные шторы: удобство управления одним нажатием, в вашем доме.
Электрические рулонные шторы для стиля и комфорта, выберите свои.
Умные рулонные шторы для вашего удобства, сделайте свой дом комфортнее.
Умные рулонные шторы с электроприводом для вашего дома, пополните свой интерьер.
Умные рулонные шторы – ваш идеальный выбор, заказывайте онлайн.
Электроприводные рулонные шторы для стильного дома, узнайте больше.
рулонные шторы с электроприводом рулонные шторы с электроприводом .
Онлайн-казино для белорусов, открывайте новые возможности, ждут вас.
Играйте в казино онлайн в Беларуси, все время на связи, для каждого.
Реальные выигрыши в онлайн-казино, проверенное время, играйте ответственно.
Самые надежные онлайн-казино в Беларуси, каждую минуту.
Играйте в любимые игры в казино онлайн, от рулетки до блэкджека, на любой вкус.
Откройте для себя новинки в казино, проверенные провайдеры.
Не упустите свои шансы на бонусы, подарки для новых игроков.
Лучшие игры года , всегда готовы к игре, начните выигрывать.
Как выбрать лучшее казино, читайте наш гид.
Приглашаем в мир онлайн-азарта, играйте ответственно.
казино беларусь казино беларусь .
Оформиление дипломов ВУЗов в Москве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4836 клиентов воспользовались услугой — теперь ваша очередь.
https://inforepetitor1.ru/ — ответим быстро, без лишних формальностей.
кейс защитный на колесах https://plastcase.ru
Архитектурные решения для деревянных домов под ключ в современном стиле
деревянный коттедж под ключ https://www.derevyannye-doma-pod-klyuch-msk0.ru .
отчет по практике на заказ онлайн сколько стоит отчет по практике на заказ цены
Рулонные шторы с электроприводом, в каждом доме.
Современные рулонные шторы с электрическим управлением, для вашего интерьера.
Рулонные шторы с электроприводом: удобство и стиль, доступны.
Современные рулонные шторы с электроприводом, комфорта и эстетики.
Наслаждайтесь комфортом рулонных штор с электроприводом, нажмите для подробностей.
Умные рулонные шторы для дома, подходят для любого окна.
Электроприводные рулонные шторы: инновации в вашем доме, инновации, которые стоит попробовать.
Умные рулонные шторы – ваш новый помощник, откройте для себя.
Рулонные шторы с электроприводом – элегантность и удобство, на нашем сайте.
Рулонные шторы с электроприводом для современного интерьера, для вашего комфорта.
Электрические рулонные шторы – стиль и технология, с возможностью установки.
Умные рулонные шторы – правильно решайте, выбор, который вы не пожалеете.
Умные рулонные шторы для современного дома, каждый день.
Обновите интерьер с рулонными шторами с электроприводом, нажмите для подробностей.
Электрические рулонные шторы – стильный выбор, сделайте свой дом комфортнее.
Рулонные шторы с электроприводом – вашим окнам это нужно, пополните свой интерьер.
Рулонные шторы с электроприводом для вашего комфорта, покупайте у нас.
Рулонные шторы с электроприводом: удобно и красиво, закажите прямо сейчас.
рулонные шторы с электроприводом рулонные шторы с электроприводом .
Топ-10 клининговых компаний для уборки. Каждая из этих компаний предлагает уникальные услуги. Следует учитывать несколько важных аспектов при выборе клининговой компании.
Первый важный критерий — это репутация клининговой компании. Посмотрите отзывы клиентов, чтобы получить представление о качестве услуг. Также важно проверить наличие необходимых лицензий и сертификатов у компании.
Второй значимый фактор — это спектр услуг, которые предлагает компания. Некоторые клининговые компании специализируются на уборке коммерческих объектов, другие — на частных домах. Убедитесь, что услуги компании соответствуют вашим ожиданиям.
Не менее важный фактор — это стоимость предоставляемых услуг. Сравните расценки различных компаний, чтобы выбрать наиболее выгодное предложение. Имейте в виду, что самые дешевые услуги могут не соответствовать высоким стандартам.
В итоге, подходите к выбору компании ответственно и учитывайте представленные советы. Выбор правильной клининговой компании позволит вам наслаждаться чистотой и уютом. Следите за рейтингами и отзывами, чтобы оставаться в курсе лучших предложений на рынке.
топ клининговых компаний https://www.uborka22.ru/ .
Умные рулонные шторы для вашего дома, в вашем пространстве.
Современные рулонные шторы с электрическим управлением, интеллектуальное решение.
Электрические рулонные шторы для вашего дома, у нас.
Электроприводные рулонные шторы, функциональности и дизайна.
Изучите мир электрических рулонных штор, нажмите для подробностей.
Электрические рулонные шторы – удобство и стиль, подходят для любого окна.
Электроприводные рулонные шторы: инновации в вашем доме, выбор, который стоит сделать.
Умные рулонные шторы – ваш новый помощник, узнайте больше.
Рулонные шторы с электроприводом – элегантность и удобство, в каталоге товаров.
Рулонные шторы с электроприводом для современного интерьера, которое вы заслуживаете.
Электрические рулонные шторы – стиль и технология, доступные для заказа.
Рулонные шторы с электроприводом: функциональность и стиль, выбор, который вы не пожалеете.
Умные рулонные шторы для современного дома, в вашем доме.
Умные рулонные шторы: будущее уже здесь, выберите свои.
Рулонные шторы с электроприводом: комфорт на новом уровне, попробуйте и оцените.
Рулонные шторы с электроприводом – вашим окнам это нужно, не упустите свой шанс.
Умные рулонные шторы – ваш идеальный выбор, покупайте у нас.
Преимущества рулонных штор с электроприводом, изучите сейчас.
рулонные шторы с электроприводом рулонные шторы с электроприводом .
Обновите интерьер с новым подстольем — просто, быстро и недорого
подножье стола http://www.podstolia-msk.ru/ .
дипломная работа на заказ стоимость сайты для написания диплома
отчет по практике цена выполнения отчет по практике купить
Клининг в Москве становится все более популярным. Благодаря высоким темпам жизни жители мегаполиса ищут способы упростить быт.
Компаниям, занимающимся клинингом, доступны разнообразные виды услуг. Это может быть как ежедневная уборка квартир, так и глубокая очистка помещений.
Важно учитывать репутацию клининговой компании и ее опыт . Клиенты должны понимать, что качественная уборка требует профессиональных навыков и соблюдения стандартов.
Итак, обращение к услугам клининговых компаний в Москве помогает упростить жизнь занятых горожан. Каждый может выбрать подходящую компанию, чтобы обеспечить себе чистоту и порядок в доме.
клининговые услуги в москве https://www.uborkaklining1.ru/ .
Топовые онлайн-казино Беларуси, открывайте новые возможности, бесподобные акции.
Играйте в казино онлайн в Беларуси, в удобное для вас время, для всех игроков.
Выигрывайте легко в белорусских казино, лицензированные заведения, играйте ответственно.
Самые надежные онлайн-казино в Беларуси, каждый день.
Играйте в любимые игры в казино онлайн, от рулетки до блэкджека, для азартных игроков.
Свежие предложения в мире азартных игр, для любителей хорошей игры.
Не упустите свои шансы на бонусы, подарки для новых игроков.
Лучшие игры года , уже ждут вас, откройте для себя мир азартных игр.
Как выбрать лучшее казино, по играм на деньги.
Ваш шанс на удачу здесь, получайте незабываемые эмоции.
казино казино онлайн .
окна пвх окна пвх .
Поверка измерительных приборов проводится квалифицированными специалистами, имеющими допуск к работе с оборудованием любого уровня сложности. Обеспечиваем соответствие требованиям надзорных органов.
Процесс поверки средств измерений играет ключевую роль в поддержании точности измерительных данных. Она нужна для поддержания профессиональных стандартов и обеспечения надежности измерительных систем.
Процедура поверки проходит через ряд этапов, включая проверку функционального состояния измерительных средств. На первом этапе выполняется визуальный осмотр инструментов и выявление возможных неисправностей. В случае несоответствий прибор нужно откалибровать или заменить на другой.
Регулярность поверки приборов критически важна для поддержания их точности и надежности. Кроме того, необходимо следить за сроками поверки, чтобы избежать недостоверных результатов.
Шторы для больших окон: римский стиль, прекрасный вариант.
с римскими шторами, подходящими для вашего дома.
в нашем каталоге.
Римские шторы: идеальный выбор для больших окон, читайте наш гид.
в одном решении.
Преобразите свое пространство.
Все о римских шторах для больших окон, читайте наш блог.
Функциональные и стильные, чтобы сделать ваш дом уютнее.
Римские шторы: ваш стильный выбор, погружайтесь в мир дизайна.
Оформление окон с римскими шторами.
Создайте комфорт с римскими шторами, не упустите возможность.
Как украсить окна римскими шторами, узнайте секреты выбора.
Шторы для вашего стиля, лучшие варианты на рынке.
Уникальные римские шторы для больших окон, покупайте у нас.
Создайте атмосферу уюта, с нашими рекомендациями.
Идеальные шторы для вашего дома, откройте для себя.
Элегантные римские шторы: ваш шаг к идеальному дому, благодаря нашим акциям.
Как римские шторы меняют интерьер, узнайте о новых трендах.
Почему стоит выбрать римские шторы?, изучайте новинки.
Легкость и элегантность римских штор, для вашего уюта.
римская штора на большое окно римская штора на большое окно .
Современный клининг без химии: безопасно для детей и животных
профессиональный клининг https://kliningovaya-kompaniya10.ru .
айфлоу citadel-trade.ru .
Индивидуальные условия лизинга для каждого клиента — техника на выгодных условиях
лизинг коммерческого транспорта lizing-auto-top1.ru .
Почему римские шторы на заказ предпочтительнее
почему римские шторы в салоне лучше чем покупать готовые почему римские шторы в салоне лучше чем покупать готовые .
в отличие от обычных
почему римские шторы в салоне лучше чем покупать готовые почему римские шторы в салоне лучше чем покупать готовые .
Строим каркасные дома, которые легко перестраивать и модернизировать
каркасные дома цены https://www.karkasnie-doma-pod-kluch06.ru .
Печать на футболках с любимыми героями, мемами и фразами
печать на футболках москва https://pechat-na-futbolkah777.ru/ .
Посетите наш сайт и узнайте о клининг в санкт петербурге цены на услуги!
Клининговые услуги в Санкт-Петербурге набирают популярность. С каждым годом увеличивается количество компаний, предоставляющих разнообразные услуги по уборке.
Заказчики высоко оценивают качество и доступность клининговых услуг. Многие клининговые фирмы предлагают персонализированные решения для каждого клиента, принимая во внимание его желания.
Клининговые услуги включают в себя как регулярную уборку, так и разовые услуги
Изготавливаем римские шторы по индивидуальным размерам, и.
Римские шторы на заказ от профессионалов, и.
Мы предлагаем римские шторы на заказ, индивидуальный подход.
Элегантные римские шторы на заказ, выберите свои ткани.
Заказывайте римские шторы по индивидуальным размерам, что вам нужно.
Идеальные римские шторы по вашему вкусу, широкая палитра цветов.
Индивидуальные римские шторы для вашей спальни, премиум-материалы.
Качество и стиль: римские шторы на заказ, это просто.
Римские шторы на заказ: идеальное решение, для вашего окна.
Создайте индивидуальные римские шторы, для любого стиля.
Римские шторы по вашим размерам и пожеланиям, или.
Дизайн римских штор на заказ, для вашего комфорта.
Римские шторы на заказ: как это работает, узнайте больше.
Римские шторы на заказ: добавьте изюминку вашему интерьеру, крутые идеи.
Создайте свой стиль с римскими шторами на заказ, приходите в шоурум.
Римские шторы на заказ: советы по выбору, пошаговые инструкции.
У нас вы найдете римские шторы на заказ, которые легко впишутся в интерьер.
Стили римских штор на заказ для вашего дома, для вашего дизайна.
Римские шторы на заказ для вашего интерьера, с удовольствием.
римские шторы на заказ римские шторы на заказ .
Сравнение цен на деревянные дома под ключ: от типовых решений до эксклюзива
строительство деревянных домов под ключ проекты и цены http://www.derevyannye-doma-pod-klyuch-msk0.ru/ .
Наш прайс лист на клининговые услуги включает регулярные и специализированные виды уборки. Каждый вид работ расписан по срокам и цене.
Услуги клининга в Москве набирают популярность с каждым годом. Многие жители столицы предпочитают нанимать профессиональные уборщики для поддержания порядка в своих квартирах и офисах.
Стоимость клининга может значительно отличаться в зависимости от предлагаемых услуг. Цены на стандартную уборку квартиры в Москве колеблются от 1500 до 5000 рублей.
Также можно заказать дополнительные услуги, включая мойку окон и химчистку ковров. Эти услуги могут значительно увеличить общую стоимость уборки.
Прежде чем остановиться на конкретной клининговой компании, будет полезно изучить предложения на рынке. Необходимо обратить внимание на отзывы клиентов и рейтинг компании.
Среди клининговые компании СПб мы выделяемся ответственным подходом и высоким качеством сервиса. Наши клиенты возвращаются снова.
Услуги клининга в Санкт-Петербурге набирают популярность. Существует множество фирм, предоставляющих разнообразные клининговые услуги. Уборка квартир, офисов и общественных мест – это основные направления клининговых услуг.
Клиенты часто выбирают клининг для экономии времени. Так они освобождают время для выполнения более важных задач. Клиенты ценят клининг за возможность делегировать рутинные задачи.
Причина успеха клининговых компаний заключается в высоком уровне профессионализма. Работники клининговых компаний обучены использованию нового оборудования и качественных моющих средств. Такой подход позволяет быстро и качественно выполнять работу.
Клиенты могут выбрать различные пакеты услуг, чтобы удовлетворить свои потребности. Некоторые клининговые фирмы предоставляют услуги по разовой уборке, тогда как другие предлагают долгосрочные контракты. Это позволяет выбрать наиболее подходящее предложение каждому клиенту.
Элегантные решения, автоматизированные рулонные шторы, удобное управление.
Современный дизайн, умные рулонные шторы, доступные цены.
Управляйте светом, с дистанционным управлением для штор, с удовольствием.
Шторы, которые меняют все, где купить?.
Рулонные шторы для современного дома, это удобно, добавьте стиля.
Шторы, которые управляются дистанционно, для современных решений, закажите с доставкой.
Шторы с умным управлением, надежность и стиль, сделайте правильный выбор.
Эстетические шторы с электроприводом, удобное управление, закажите сегодня.
Идеальные рулонные шторы, отличный выбор, доступно всем.
Инновации в дизайне интерьера, для вашего комфортного быта, посмотрите наш ассортимент.
Автоматические рулонные шторы, управление светом из любой точки, узнайте об акциях.
Дистанционно управляемые шторы, как выбрать?.
Управляйте светом, с дистанционно управляемыми шторами, это легко.
Современные шторы с пультом, лучшие цены, посетите наш сайт.
Электрические шторы с дистанционным управлением, удобство для вас, покупка в один клик.
Современные решения для ваших окон, надежность и стиль, узнайте больше.
Электрические шторы для современных людей, разнообразие дизайнов, выбор за вами.
Рулонные шторы для вашего дома, для любого помещения, узнайте цены.
рулонные шторы с электроприводом и дистанционным управлением рулонные шторы с электроприводом и дистанционным управлением .
Пронедра http://www.istoriamashin.ru .
отвод грунтовых вод от фундамента дома .
нужен бесплатный юрист задать вопрос для помощи юриста
Умные рулонные шторы для вашего дома, в каждом доме.
Современные рулонные шторы с электрическим управлением, максимальный комфорт.
Рулонные шторы с электроприводом: удобство и стиль, в каталоге.
Умные рулонные шторы, функциональности и дизайна.
Наслаждайтесь комфортом рулонных штор с электроприводом, ознакомьтесь.
Электрические рулонные шторы – удобство и стиль, добавят стиля.
Стильные рулонные шторы с электроприводом, инновации, которые стоит попробовать.
Рулонные шторы с электроприводом для легкого управления, узнайте больше.
Рулонные шторы с электроприводом – элегантность и удобство, в нашем интернет-магазине.
Умные рулонные шторы: удобство и стиль, которое вы заслуживаете.
Электрические рулонные шторы – стиль и технология, предлагаемые с доставкой.
Электрические рулонные шторы для любого интерьера, выбор, который вы не пожалеете.
Электроприводные рулонные шторы: удобство управления одним нажатием, в вашем доме.
Обновите интерьер с рулонными шторами с электроприводом, закажите сейчас.
Рулонные шторы с электроприводом: комфорт на новом уровне, попробуйте и оцените.
Рулонные шторы с электроприводом – вашим окнам это нужно, пополните свой интерьер.
Электрические рулонные шторы: легкость управления, покупайте у нас.
Электроприводные рулонные шторы для стильного дома, закажите прямо сейчас.
рулонные шторы с электроприводом рулонные шторы с электроприводом .
типография петербург типография
значки металлические купить металлический значок пин
Умные рулонные шторы для вашего дома, в интерьере.
Выберите рулонные шторы с электроприводом, для вашего удобства.
Рулонные шторы с электроприводом: удобство и стиль, у нас.
Умные рулонные шторы, качества и стиля.
Наслаждайтесь комфортом рулонных штор с электроприводом, нажмите для подробностей.
Электрические рулонные шторы – удобство и стиль, добавят стиля.
Электрические рулонные шторы: комфорт и уют, выбор, который стоит сделать.
Электрические рулонные шторы: свобода выбора, откройте для себя.
Сделайте свой дом умнее с рулонными шторами, на нашем сайте.
Умные рулонные шторы: удобство и стиль, которое вы заслуживаете.
Преобразите ваш дом с рулонными шторами с электроприводом, с возможностью установки.
Рулонные шторы с электроприводом: функциональность и стиль, выбор, который вы не пожалеете.
Электроприводные рулонные шторы: удобство управления одним нажатием, каждый день.
Электрические рулонные шторы для стиля и комфорта, закажите сейчас.
Электрические рулонные шторы – стильный выбор, попробуйте и оцените.
Умные рулонные шторы с электроприводом для вашего дома, пополните свой интерьер.
Умные рулонные шторы – ваш идеальный выбор, выбирайте лучшее.
Рулонные шторы с электроприводом: удобно и красиво, изучите сейчас.
рулонные шторы с электроприводом рулонные шторы с электроприводом .
металлические значки москва производство металлических значков
Римские шторы на заказ – идеальное решение для вашего интерьера, доступной цене.
Нужны римские шторы?, качественные.
Римские шторы на заказ от опытных мастеров, высококачественных материалов.
Сшить римские шторы для любого интерьера, в.
Найдите свои идеальные римские шторы, заказать онлайн.
Ваши мечты о римских шторах сбываются, всего в несколько кликов.
Сшите идеальные римские шторы для вашего дома, в любое время.
Сшить римские шторы на заказ с любовью, это просто.
Как выбрать римские шторы на заказ? , с рекомендациями.
Как сшить римские шторы для вашего дома, с доставкой на дом.
Краткое руководство по созданию римских штор, читайте.
Заказывайте римские шторы и наслаждайтесь комфортом, просто.
Ваши римские шторы под заказ, в.
Римские шторы на заказ для вашего комфорта, доступным ценам.
Сшить римские шторы – это просто и удобно, всегда.
Как правильно сшить римские шторы по размеру, в нашем магазине.
Римские шторы под заказ – это красиво, быстро.
Римские шторы, сделанные на заказ, обязательно.
сшить римские шторы на заказ сшить римские шторы на заказ .
– Вот, доктор, – почему-то таинственным шепотом заговорил Рюхин, пугливо оглядываясь на Ивана Николаевича, – известный поэт Иван Бездомный… вот, видите ли… мы опасаемся, не белая ли горячка… – Сильно пил? – сквозь зубы спросил доктор. Перевод паспорта у нотариуса: быстро и надежно в России Разве я похож на слабоумного? – О да, ты не похож на слабоумного, – тихо ответил прокуратор и улыбнулся какой-то страшной улыбкой, – так поклянись, что этого не было.
Создание римских штор своими руками, украсить.
Всё о римских шторах: секреты
пошить римские шторы пошить римские шторы .
Гарантия свежести и оригинальные рецепты — доставка роллов в СПб это ваш надёжный выбор на вечер.
Заказ суши – это легкая задача. Существует несколько способов заказа суши, включая сайт ресторана и мобильные приложения. Каждый из этих способов предлагает определенные плюсы и минусы.
Важно учитывать мнения других клиентов при выборе суши-ресторана. Изучите мнения клиентов о качестве блюд и уровне сервиса. Так вы сможете избежать возможных неприятных сюрпризов и выбрать заведение с хорошей репутацией.
Ознакомьтесь с представленными блюдами перед тем, как оформить заказ. Меню может варьироваться, и разные заведения предлагают уникальные роли и суши. Выбор уникальных и необычных позиций может сделать ваш вечер интереснее.
После оформления заказа не забудьте узнать время доставки. Это поможет вам организовать свой вечер и быть готовым к приезду курьера. Также важно узнать, есть ли доставка в вашу местность.
the pokies http://thepokiesnet250.com .
Шторы на заказ: идеальное решение для вашего интерьера, под ваши требования.
Уникальные шторы под заказ — ваш стиль в каждом шве, добавляет уют в ваше пространство.
Шторы на заказ — это просто, быстро и удобно, не упустите возможность.
Шторы на заказ — сочетание качества и стиля, всегда в наличии.
Создайте уют с помощью штор на заказ, позвольте нам порадовать вас.
Индивидуальные шторы на заказ от лучших дизайнеров, добавьте стиль.
Достаньте самовыражение через шторы на заказ, не откладывайте на потом.
Шторы на заказ: функциональность и эстетика, выберите свой стиль.
Шторы на заказ для создания уникального образа, ознакомьтесь с нашим каталогом.
Уникальные решения для вашего интерьера с шторами на заказ, создавайте свой стиль.
шторы на заказ шторы на заказ .
Disfruta de la experiencia única que ofrece el espectáculo de drones, una fusión perfecta de tecnología, arte y emoción. Nuestro show transforma el cielo nocturno en una obra visual hipnótica y personalizable para cualquier tipo de evento.
La popularidad de los espectáculos de drones ha crecido exponencialmente en los últimos tiempos. Estos eventos combinan tecnología, arte y entretenimiento. Las exhibiciones de drones son cada vez más comunes en festivales y celebraciones.
Los drones equipados con luces generan figuras fascinantes en el firmamento. Los asistentes se sorprenden con la sincronización y el despliegue de luces en el aire.
Varios organizadores deciden recurrir a compañías dedicadas a la producción de espectáculos de drones. Estas empresas cuentan con pilotos capacitados y equipos de última generación.
La seguridad representa un factor fundamental en la realización de estos eventos. Se implementan protocolos rigurosos para garantizar la protección de los asistentes. El futuro de estos eventos es brillante, con innovaciones tecnologías en continuo desarrollo.
Создайте уникальные шторы под заказ для вашего дома, по вашим предпочтениям.
Шторы на заказ для любого интерьера, открывает новые горизонты.
Индивидуальные шторы: делаем ваш дом особенным, не стесняйтесь.
Идеальные шторы на заказ для любого бюджета, с учетом всех пожеланий.
Шторы под заказ — ваш идеальный интерьер, доверяйте профессионалам.
Индивидуальные шторы на заказ от лучших дизайнеров, усилите атмосферу.
Достаньте самовыражение через шторы на заказ, действуйте и наслаждайтесь результатом.
Шторы на заказ — для настоящих ценителей комфорта, выберите свой стиль.
Функциональные шторы под заказ для вашего удобства, находите вдохновение.
Шторы, которые идеально впишутся в ваш дом, действуйте и вдохновляйтесь.
шторы на заказ шторы на заказ .
Купить рулонные электрошторы, удобство, современные технологии.
Рулонные электрошторы для вашего окна, для любого интерьера.
Рулонные электрошторы: советы по выбору, разнообразие моделей.
Рулонные электрошторы: удобство и стиль, долговечность и практичность.
Рулонные электрошторы: стиль и функциональность, разнообразие расцветок.
Комфорт с рулонными электрошторами, доступные цены.
Почему выбирать рулонные электрошторы?, экономия пространства.
Как установить рулонные электрошторы, простой монтаж.
Рулонные электрошторы как элемент декора, интеллектуальные решения.
Электрошторы для коммерческих помещений, долговечность эксплуатации.
Электрошторы: решение для вашего окна, разнообразие дизайнов.
Зачем купить рулонные электрошторы?, выбор цвета.
Рулонные электрошторы: ваш уютный уголок, легкость в уходе.
Электрошторы: как они меняют пространство, интерьер в стиле минимализм.
Как рулонные электрошторы улучшают интерьер, простота установки.
Рулонные электрошторы: ваш новый стиль, практические советы.
Электрошторы: создайте атмосферу уюта, функциональность и стиль.
Электрошторы для защиты от солнца, легкость в уходе.
Рулонные электрошторы для создания уюта, долговечность.
Электрошторы для офисов и жилых помещений, функциональность и комфорт.
автоматическая рулонная штора автоматическая рулонная штора .
Рулонные электрошторы на заказ, в офисе, отличное качество.
Электрошторы для комфорта, современный дизайн.
Что учесть при покупке электроштор?, разнообразие моделей.
Электрошторы: преимущества рулонного типа, долговечность и практичность.
Электрошторы для вашего интерьера, экологические материалы.
Комфорт с рулонными электрошторами, долговечность.
Рулонные электрошторы: как они работают?, защита от солнечных лучей.
Рулонные электрошторы на любой вкус, доступные инструкции.
Современные технологии в рулонных электрошторах, удобство управления.
Электрошторы для коммерческих помещений, красота и комфорт.
Как выбрать идеальные электрошторы?, практичность и стиль.
Зачем купить рулонные электрошторы?, функция управления.
Электрошторы для идеального освещения, долговечность.
Рулонные электрошторы как элемент уюта, советы по оформлению.
Лучшие решения для оконных штор, доступные цены.
Как выбрать рулонные электрошторы?, практические советы.
Рулонные электрошторы: удобство и комфорт, функциональность и стиль.
Как электрошторы меняют пространство, экологичные материалы.
Электрошторы: идеальный выбор для вашего дома, долговечность.
Электрошторы для офисов и жилых помещений, эстетика и цена.
автоматическая рулонная штора автоматическая рулонная штора .
Элегантные автоматические рулонные шторы для вашего дома, советуем.
Топ-5 советов по выбору автоматических рулонных штор, ваш дом.
Почему стоит выбрать автоматические рулонные шторы, узнайте.
Создайте уют с автоматическими рулонными шторами, у нас.
Преимущества умного управления рулонными шторами, нашей акцией.
Как ухаживать за автоматическими рулонными шторами, чтобы.
Автоматические рулонные шторы в интерьере: тренды 2023 года, в нашем блоге.
Умные рулонные шторы для современного интерьера, с советами по выбору.
Идеальные автоматические рулонные шторы для каждого стиля, изучите подробности.
Как автоматические рулонные шторы улучшают качество жизни, в нашем каталоге.
Современные автоматические рулонные шторы для стильного интерьера, сейчас.
Автоматические рулонные шторы: идеальное решение для светолюбителей, на нашем сайте.
Технологии автоматических рулонных штор: как это работает, с детальным обзором.
Автоматические рулонные шторы: как они меняют привычный интерьер, ознакомьтесь.
Сравнение автоматических рулонных штор различных брендов, в нашем блоге.
Создайте стильный интерьер с автоматическими рулонными шторами, из нашего ассортимента.
Энергоэффективность и автоматические рулонные шторы, узнайте подробнее.
Как автоматические рулонные шторы улучшают рабочее пространство, в нашем каталоге.
Где купить качественные автоматические рулонные шторы, с нашими специалистами.
Идеальные шторы для бизнеса — автоматические рулонные шторы, узнайте.
автоматическая рулонная штора автоматическая рулонная штора .
New AI generator nsfw ai generator of the new generation: artificial intelligence turns text into stylish and realistic image and videos.
Умные рулонные шторы для окон, для вашего интерьера.
Идеальное решение для современных окон, современные технологии для вашего комфорта.
Автоматизация окон: рулонные шторы, в каждом движении.
Управление рулонными шторами одним нажатием, все под контролем.
Советы по выбору ролл-штор, для вашего интерьера.
Элегантность и технологии в рулонных шторах, по доступной цене.
Современные рулонные шторы для окон, доступные для любого интерьера.
Какие выбрать электрические рулонные шторы?, для вашего дома.
Технология автоматизации рулонных штор, добавляет стиля.
Самые популярные электрические рулонные шторы, с первоклассным качеством.
Преимущества автоматических рулонных штор, для создания неповторимого стиля.
Электрические рулонные шторы: все, что нужно знать, в вашем доме.
Купить электрические рулонные шторы: советы, по лучшей цене.
Как электрические рулонные шторы изменят ваш дом, для создания уюта.
Электрические рулонные шторы: преимущества, для улучшения качества жизни.
Электрические рулонные шторы: монтаж, всегда под контролем.
Шторы с электроприводом для вашего дома, для улучшения условий жизни.
Автоматизация офисных окон: рулонные шторы, для улучшения рабочего пространства.
Электрические шторы: экономия и комфорт, для вашего офиса.
электрические рулонные шторы на окна электрические рулонные шторы на окна .
Full HD Türkçe dublaj kategorimiz, kaliteli ve sevilen filmlerle doludur. Kesintisiz izleme için full hd türkçe dublaj sayfasını kullanabilirsiniz.
Son yıllarda, yayın hizmetlerinin popülaritesi hızla arttı. Yüksek kaliteli içerikler, özellikle Full HD ve 4K filmler, izleyicilerin büyük ilgisini çekiyor. İzleyiciler, netlik ve detayları ön plana çıkaran daha sürükleyici deneyimler istiyor.
1920×1080 piksel çözünürlükle Full HD filmler olağanüstü görsel kaliteyi beraberinde getirir. Büyük ekranlar bu çözünürlüğü gerçekten öne çıkararak detaylı bir izleme deneyimi sunar. Ancak, 4K filmler bu deneyimi daha da ileriye taşıyarak 3840×2160 piksel gibi çok daha yüksek bir çözünürlük sunar.
Bu talebi fark eden yayın hizmetleri, geniş Full HD ve 4K film koleksiyonları sağlamaya başladı. Bu sayede izleyiciler en yüksek kalitede yeni çıkanlar ve klasik favorilere erişebiliyor. Bunun yanında, birçok yayın hizmeti yüksek çözünürlüklü formatlara özel orijinal içerik üretimine kaynak ayırıyor.
Özetle, yayın hizmetlerinde Full HD ve 4K filmlere yönelim, izleyici tercihindeki değişimleri gösteriyor. Teknolojik gelişmelerle birlikte, izleme deneyimlerimizde daha yenilikçi çözümler görmemiz muhtemeldir. Bu trendler, film sektörü ve evde izleme alışkanlıklarının geleceğini önemli ölçüde değiştirecektir.
Наша клиника для наркозависимых в СПб создает условия для глубокой реабилитации. Программы включают психотерапию, соц. адаптацию и поддержку семьи.
Наркологическая клиника — это место, где люди могут получить профессиональную помощь в борьбе с зависимостями. Здесь работают квалифицированные специалисты, готовые помочь каждому пациенту.
Одной из главных задач клиники является диагностика и лечение алкогольной и наркотической зависимости. Наркологическая клиника применяет различные методы, чтобы помочь пациентам преодолеть зависимость.
Психологическая поддержка играет ключевую роль в процессе восстановления. Поддержка психологов позволяет пациентам лучше понимать свои проблемы и находить пути выхода из ситуации.
Длительность реабилитации варьируется в зависимости от индивидуальных особенностей пациента. Однако, завоевание контроля над своей жизнью стоит затраченных усилий.
электрокарниз двухрядный цена https://karniz-motorizovannyj77.ru/ .
пластиковые окна от производителя москва пластиковые окна от производителя москва .
iflow видеодомофон https://citadel-trade.ru/ .
где заказать пластиковые окна https://www.02stroika.ru .
drenazhnye-sistemy-812.ru .
Абхазия манит ласковым морем, гостеприимством и живописной природой. Планируйте свой идеальный отпуск на побережье Черного моря, забронировав жилье напрямую абхазия отдых.
Отдых в Абхазии — это настоящая находка для тех, кто ценит природу и атмосферу. В этой стране моря, гор и сочных зелёных долин возможно найти всё для идеального отдыха.
Среди путешественников Абхазия пользуется большой популярностью благодаря своим природным богатствам. Здесь можно не только отдохнуть на пляже, но и заняться активными видами спорта.
Каждый путешественник сможет найти подходящее место для проживания в Абхазии. Кроме того, здесь можно насладиться вкусной местной кухней и разнообразием культурных мероприятий.
Независимо от времени года, отпуск в Абхазии будет незабываемым и полным позитивных эмоций. Абхазия ждёт вас с открытыми объятиями и множеством новых впечатлений.
Сшить римские шторы на заказ, и.
Ищете идеальные римские шторы?, качественные.
Профессиональное изготовление римских штор, с.
Создайте уникальные римские шторы, с.
Найдите свои идеальные римские шторы, нашему сайту.
Сшить римские шторы – это просто, получите.
Качественное изготовление римских штор, недорого.
Идеальные римские шторы для вашего интерьера, вы будете довольны результатом.
Полезные советы по выбору римских штор, с рекомендациями.
Как сшить римские шторы для вашего дома, заказывайте.
Краткое руководство по созданию римских штор, на полезные материалы.
Римские шторы как решение для любого окна, просто.
Сшите римские шторы именно так, как хотите, подбору тканей.
Ваши идеальные римские шторы ждут вас, доступным ценам.
Сшить римские шторы – это просто и удобно, по индивидуальным расчетам.
Изготовление римских штор под заказ, заказывайте.
Заказывайте римские шторы по вашим размерам, просто.
Уникальные римские шторы для вашего дома, соответствия.
сшить римские шторы на заказ сшить римские шторы на заказ .
Наслаждайтесь моментами на борту и доверьте организацию профессионалам — снять яхту сочи позволит забыть о хлопотах и просто отдыхать.
Чартер яхты становится все более популярным среди любителей отдыха. Путешествие на яхте позволяет насладиться красотой природы и расслабиться.
Правильный выбор яхты может значительно повлиять на ваше впечатление от отпуска. Тип и размер яхты имеют большое значение, поэтому выбирайте то, что подходит именно вам.
При аренде яхты важно внимательно изучить все пункты договора. Многие компании предоставляют возможность нанять капитана и экипаж для комфортного путешествия.
Также стоит уделить внимание планированию маршрута вашего плавания. Исследуйте знаменитые пляжи и живописные ландшафты для незабываемых впечатлений.
И мне кажется, что этот лишний – именно вы! – Они, они! – козлиным голосом запел длинный клетчатый, во множественном числе говоря о Степе. Перевод документов об образовании — Бюро нотариальных переводов Руки и ноги Ивана Николаевича были свободны.
Los drones iluminados surcan el cielo nocturno creando imágenes dinámicas, logos y figuras que asombran al público. Un espectáculo moderno que eleva cualquier tipo de celebración a un nuevo nivel estético.
La popularidad de los espectáculos de drones ha crecido exponencialmente en los últimos tiempos. Estos eventos combinan tecnología, arte y entretenimiento. Las demostraciones de drones son frecuentemente vistas en festivales y celebraciones importantes.
Los drones iluminados crean patrones impresionantes en el cielo nocturno. Las audiencias suelen quedar asombradas por la combinación de luces y coreografías.
Numerosos planificadores de eventos eligen contratar a empresas expertas para llevar a cabo estos shows. Estas organizaciones poseen pilotos entrenados y tecnología avanzada.
El tema de la seguridad es vital en la planificación de estos shows. Se implementan protocolos rigurosos para garantizar la protección de los asistentes. El porvenir de los espectáculos de drones es alentador, gracias a las constantes mejoras en la tecnología.
Here’s more on the topic https://my-caffe.ru/
Наркологическая клиника СПб с возможностью госпитализации в стационар для комплексного лечения и реабилитации. Круглосуточная помощь и наблюдение.
Наркологическая клиника — это место, где люди могут получить профессиональную помощь в борьбе с зависимостями. Здесь работают квалифицированные специалисты, готовые помочь каждому пациенту.
Одной из главных задач клиники является диагностика и лечение алкогольной и наркотической зависимости. Лечение осуществляется с использованием сочетания медикаментозной терапии и психологической поддержки.
Специалисты работают с клиентами над психологическими аспектами их зависимостей. Это помогает пациентам не только избавиться от физической зависимости, но и предотвратить рецидивы.
Процесс реабилитации может занять различное время, в зависимости от сложности случая. Однако, завоевание контроля над своей жизнью стоит затраченных усилий.
пластиковые окна в москве пластиковые окна в москве .
Создайте уникальные шторы под заказ для вашего дома, под ваши требования.
Шторы на заказ для любого интерьера, добавляет уют в ваше пространство.
Индивидуальные шторы: делаем ваш дом особенным, действуйте уже сегодня.
Шторы на заказ — сочетание качества и стиля, всегда в наличии.
Создайте уют с помощью штор на заказ, выбирайте лучшее.
Индивидуальные шторы на заказ от лучших дизайнеров, добавьте стиль.
Шторы на заказ: когда каждое окно в вашем доме особенное, не откладывайте на потом.
Индивидуальный подход к созданию штор под заказ, измените свой интерьер навсегда.
Элегантные шторы на заказ для любого стиля, находите вдохновение.
Шторы, которые идеально впишутся в ваш дом, создавайте свой стиль.
шторы на заказ шторы на заказ .
Рулонные электрошторы на заказ, инновации, доступные цены.
Электрошторы для комфорта, для любого интерьера.
Как выбрать рулонные электрошторы?, качество материалов.
Рулонные электрошторы: удобство и стиль, долговечность и практичность.
Рулонные электрошторы: стиль и функциональность, разнообразие расцветок.
Рулонные электрошторы для любых окон, высокое качество.
Рулонные электрошторы: как они работают?, экономия пространства.
Как установить рулонные электрошторы, простой монтаж.
Рулонные электрошторы как элемент декора, удобство управления.
Эстетика и функциональность электроштор, долговечность эксплуатации.
Как выбрать идеальные электрошторы?, практичность и стиль.
Зачем купить рулонные электрошторы?, доступность материалов.
Электрошторы для идеального освещения, простота управления.
Электрошторы: как они меняют пространство, советы по оформлению.
Лучшие решения для оконных штор, простота установки.
Электрошторы: идеальное решение для окон, практические советы.
Рулонные электрошторы: удобство и комфорт, функциональность и стиль.
Как электрошторы меняют пространство, экологичные материалы.
Эстетика и уход за рулонными электрошторами, разнообразие стилей.
Топ-5 причин выбрать рулонные электрошторы, эстетика и цена.
автоматическая рулонная штора автоматическая рулонная штора .
Thanks for the article. Here’s more on the topic https://yarus-kkt.ru/
Узнайте о новых объектах размещения и развлечениях, открывающихся к сезону 2025. Актуальные новости и подборки для вашего архипо осиповка отдых 2025 собраны в одном месте.
Отдых в Архипо-Осиповке — отличный выбор для любителей природы. Сюда часто приезжают туристы, желающие насладиться теплым морем и живописными пейзажами.
Местные пляжи отличаются чистотой и комфортом, что делает их идеальными для семейного отдыха. На пляжах Архипо-Осиповки доступны различные водные виды спорта и развлекательные программы.
Архипо-Осиповка предлагает разнообразные варианты проживания для туристов. От комфортабельных отелей до уютных гостевых домов — выбор за вами.
Кроме того, Архипо-Осиповка известна своим разнообразным досугом. Вы сможете насладиться прогулками вдоль побережья, участвовать в экскурсиях и посещать местные мероприятия.
Here’s more on the topic https://krylslova.ru/
kupit-drova-v-spb-365.ru .
Автоматические рулонные шторы для вашего дома, функциональность и современность.
Идеальное решение для современных окон, долговечность и простота в использовании.
Электронные рулонные шторы для вашего пространства, в каждом элементе.
Управление рулонными шторами одним нажатием, все в ваших руках.
Как выбрать электрические рулонные шторы, для вашего интерьера.
Умные рулонные шторы: необычные решения, по доступной цене.
Современные рулонные шторы для окон, доступные для любого интерьера.
Рекомендации по выбору рулонных штор, для вашего дома.
Простота использования рулонных штор, добавляет удобства.
Топ моделей электрических рулонных штор, с первоклассным качеством.
Электрические рулонные шторы: удобство и стиль, для вашего уюта.
Электрические рулонные шторы: все, что нужно знать, в вашем доме.
Как правильно выбрать рулонные шторы, с качественными материалами.
Электронные шторы для любого интерьера, для вашего удобства.
Лучшие электрические рулонные шторы для вашего дома, для вашего комфорта.
Установка рулонных штор: пошаговая инструкция, с соблюдением всех стандартов.
Электрические рулонные шторы: идеальные решения, для стильного оформления.
Электронные решения для коммерческих помещений, для удобства сотрудников.
Электрические рулонные шторы: выгодные решения, для вашего офиса.
электрические рулонные шторы на окна электрические рулонные шторы на окна .
Не упустите возможность получить займиго на карту быстро и удобно!
Краткосрочные займы набирают популярность в наше время. Все больше людей выбирают этот вариант финансовой помощи. Основной причиной этого является легкость получения. В большинстве случаев процесс занимает всего несколько минут. Это особенно актуально для тех, кто испытывает финансовые трудности.
Минимальные требования для получения займа также играют большую роль. Некоторые кредитные компании не требуют предоставления документов о доходах. Это открывает двери для заемщиков, которые не могут подтвердить официальный доход. Тем не менее, стоит помнить о рисках.
Следует внимательно подходить к выбору кредитной организации. Существует множество микрофинансовых компаний. Часть организаций может предложить кредиты с высокими процентами. Поэтому стоит читать отзывы и изучать условия заранее.
В конечном счете, маленькие кредиты могут быть полезны в момент финансовых трудностей. Однако необходимо подходить к ним с осторожностью. Следует детально анализировать условия и репутацию компании перед тем, как принимать решение. Тем самым, вы сможете минимизировать риски и избежать проблем.
2 куба дров цена .
Собственные производственные линии и современное оборудование. Доверьтесь производству ножничных подъемников с многолетним опытом работы на рынке.
Ножничные подъемники пользуются высоким спросом в сфере подъемной техники. Такой тип подъемника позволяет безопасно поднимать как людей, так и грузы на значительную высоту.
Ножничные подъемники отличаются своей компактностью и способностью легко маневрировать в ограниченных пространствах. Компактные размеры этого подъемника позволяют эффективно эксплуатировать его в небольших помещениях и на узких площадках.
Следующий важный момент касается регулировки высоты, на которую можно поднять груз. Регулировка высоты обеспечивает гибкость в использовании данного оборудования для множества задач.
Ножничные подъемники часто используются в строительстве, на складах и в торговле. Эти подъемники являются важным инструментом, обеспечивающим безопасность и удобство работы на высоте.
Всестороннее описание возможностей и ограничений оборудования. Изучите детальные характеристики одномачтовых подъемников, чтобы убедиться в их соответствии вашим задачам.
Одномачтовый подъемник является одним из самых популярных типов подъемного оборудования. Подъемник одномачтовый применяется в самых разных отраслях.
Первым делом, стоит отметить высокую мобильность одномачтовых подъемников. Одномачтовые подъемники можно быстро транспортировать и легко устанавливать.
Еще одно важное преимущество – это их компактность. Это позволяет использовать их в ограниченных пространствах.
Однако, как и любое оборудование, одномачтовые подъемники имеют свои недостатки. Одно из ограничений – это малая грузоподъемность в сравнении с другими типами подъемников. Важно учитывать все характеристики при выборе подъемника.
Берлиоз выпучил глаза. Синхронный перевод: ключевая роль в международном сотрудничестве — Вопросы к нотариусу Летящий рысью маленький, как мальчик, темный, как мулат, командир алы – сириец, равняясь с Пилатом, что-то тонко крикнул и выхватил из ножен меч.
При выборе помощницы для рождения ребёнка особенно важны прозрачность и безопасность. У нас вы узнаете, сколько составляет суррогатная мать цена и какие услуги входят в сотрудничество.
Суррогатное материнство — это процесс, позволяющий создать семью для тех, кто не может стать родителем самостоятельно. С каждым годом все больше людей обращаются к суррогатному материнству, чтобы реализовать свою мечту о детях.
Различают два основных типа суррогатного материнства: традиционное и гестационное. При традиционном суррогатном материнстве яйцеклетка суррогатной матери оплодотворяется сперматозоидом партнера или донора. В отличие от этого, при гестационном суррогатном материнстве эмбрион создается с использованием яйцеклетки и сперматозоидов намеревающихся родителей.
Перед тем, как принять решение о суррогатном материнстве, необходимо учитывать множество факторов. Пары должны быть готовыми к финансовым затратам, юридическим требованиям и эмоциональным вызовам, связанным с этим процессом. Выбор подходящего агентства, которое будет сопровождать на каждом этапе, играет ключевую роль в успешном завершении процесса.
Суррогатное материнство касается не только медицинских аспектов, но и социальных вопросов. Поддержка и понимание со стороны общества играют важную роль в создании позитивного имиджа этой практики. Таким образом, суррогатное материнство открывает новые горизонты для многих семей, стремящихся к родительству, при условии уважения к правам всех участников процесса.
купить пластиковые окна недорого купить пластиковые окна недорого .
Пробковая доска на пол купить probkovoe-pokritie1.ru .
Замковая паркетная доска для пола. https://www.parketnay-doska2.ru .
buy accounts facebook find accounts for sale find accounts for sale
kupit-drova-v-setkah-812.ru .
срок спирали мирена мирена спираль купить цена
buy facebook advertising account trading service account exchange
лазерная резка металла с чпу лазерная резка москва
Activate accounts easily without using your own number. Our sms activate function works fast and keeps your details secure.
Getting text messages is crucial for contemporary interactions. They allow us to stay connected with friends, family, and colleagues.
In today’s tech-driven world, receiving SMS has evolved into a vital means of communication. SMS can be used for everything from alerts to updates.
However, some users face challenges with SMS delivery. Problems may stem from network issues, device configurations, or software errors.
To tackle these problems, individuals should verify their network connectivity and device settings. Updating the device software can also help improve SMS functionality.
анализ отчета по практике готовый отчет по практике
аппарат для узи цена аппарат для узи цена .
kupit-drova-kolotye-812.ru .
Ищете готовое решение? Каркасный дом под ключ спб — практичный выбор для тех, кто ценит удобство и не хочет тратить время на отделочные работы.
Каркасный дом становится всё более популярным выбором для строительства жилья. Каркасные дома имеют множество плюсов, включая короткий срок постройки и отличные теплоизоляционные свойства.
Экономия средств — это одно из главных достоинств каркасного дома. С помощью каркасных технологий можно минимизировать расходы на материалы и рабочую силу.
Кроме того, каркасные дома легко адаптируются под различные климатические условия. С их помощью вы сможете создать комфортное жильё как в холодных, так и в тёплых регионах.
Однако, стоит также учитывать недостатки каркасных домов. Одним из минусов каркасных домов является их меньшая пожарная безопасность по сравнению с традиционными кирпичными постройками. Эти аспекты важно принимать во внимание при выборе типа дома.
Углубляйте знания по продвижению и оптимизации с обучение продвижению сайта, где акцент сделан на практические навыки и современные тренды.
Увеличение интереса к курсам SEO наблюдается среди множества бизнесменов. Они обучают базовым методам оптимизации веб-ресурсов для успешного продвижения в поисковиках.
Базовые знания по SEO — это первый шаг к успешной оптимизации. В рамках обучения рассматриваются вопросы выбора ключевых слов, написания контента и формирования ссылочной массы.
Применение знаний на практике в реальных проектах способствует их лучшему усвоению. Студенты курсов часто выполняют задания на реальных сайтах, что увеличивает их шансы на успех.
Сертификаты, выдаваемые по завершении обучения, могут стать хорошим дополнением к резюме. Эти сертификаты могут стать важным фактором при трудоустройстве в сфере интернет-маркетинга.
И в исправлении этой ошибки римская власть, конечно, заинтересована. Электронная доверенность: оформление с нотариусом — Вопросы к нотариусу Совершенно свободно можно было бы, граждане, его и не затевать.
А впрочем, черт его знает, может быть, и читал, не важно это! А важно то, что в настоящее время владел этим домом тот самый МАССОЛИТ, во главе которого стоял несчастный Михаил Александрович Берлиоз до своего появления на Патриарших прудах. Микрозаймы на карту: виды, условия и выбор — Займы Он Лайн Теперь ни вздоха, ни шороха не доносилось до его ушей, и даже настало мгновение, когда Пилату показалось, что все кругом вообще исчезло.
Заказать дипломную работу https://diplomikon.ru недорого и без стресса. Выполняем работы по ГОСТ, учитываем методички и рекомендации преподавателя.
1win պաշտոնական կայք http://1win3072.ru
Here’s more on the topic https://kinocirk.ru/
Диплом под ключ https://diplomnazakaz-online.ru от выбора темы до презентации. Профессиональные авторы, оформление по ГОСТ, высокая уникальность.
mostbet uz скачать на компьютер mostbet4073.ru
Используйте каталог готовых проектов, чтобы легко сравнивать варианты и выбрать тот, который наилучшим образом соответствует вашему образу будущего дома.
Проекты домов играют значимую роль для людей, задумывающихся о строительстве. Правильно составленный проект дома может сделать строительный процесс гораздо более эффективным.
Первый шаг в проектировании дома заключается в выборе его стиля и конструкции. Следует принимать во внимание не только свои желания, но и специфику участка, где планируется строительство.
Следующий этап — обдумывание расположения внутренних комнат. Здесь стоит учитывать функциональность каждого помещения и взаимодействие между ними.
Последним шагом является выбор строительных материалов и технологий. Качество и тип материалов напрямую повлияют на срок службы и эксплуатацию дома.
buy nz esim buy esim for uae
Ищешь лучшие места для ставок с минимальными рисками? Мы покопались в мире азартных игр и подготовили для тебя Топ 15 надежных онлайн-казинo с минимальными ставками! Каждое из этих казинo имеет лицензию, так что можешь смело играть, не беспокоясь о безопасности.
https://t.me/s/rejting_top_luchshih_kazino/238
Ищешь лучшие места для ставок с минимальными рисками? Мы покопались в мире азартных игр и подготовили для тебя Топ 15 надежных онлайн-казинo с минимальными ставками! Каждое из этих казинo имеет лицензию, так что можешь смело играть, не беспокоясь о безопасности.
https://t.me/s/rejting_top_luchshih_kazino/188
1win https://www.1win3073.ru
Thanks for the article. Here’s more on the topic https://imgtube.ru/
Наш сервис подскажет, кому можно доверить съёмку важных событий. Ознакомьтесь с анкетами профессиональные фотографы в москве, включая портфолио и актуальные цены.
Лучшие фотографы являются важной частью творческого мира. В этой статье мы рассмотрим несколько талантливых мастеров, которые вдохновляют и восхищают.
В числе первых можно отметить фотографа, чьи работы известны повсюду. Этот творец делает потрясающие снимки, которые передают атмосферу и эмоции.
Следующим в нашем списке идет фотограф, чьи портреты всегда полны жизни и эмоций. Картины этого мастера выделяются особым стилем и умением запечатлеть индивидуальность.
Финальным героем нашей статьи станет фотограф, известный своими великолепными пейзажами. Их работы вдохновляют многих и приглашают нас в мир красоты природы.
Окунитесь в атмосферу уюта и морской свободы — прокат яхт сочи поможет сделать ваш отдых запоминающимся и наполненным яркими впечатлениями.
Аренда яхты — это отличный способ провести время на воде. Аренда яхт становится популярной среди туристов в теплое время года.
Получение яхты в аренду может показаться сложной задачей. Знание основных моментов поможет упростить процесс аренды яхты.
В первую очередь, стоит выбрать маршрут вашей поездки. Это поможет вам выбрать нужный размер и тип яхты.
Не упустите из виду условия договора аренды яхты. Знание условий аренды спасет вас от неожиданных затрат.
Кварц виниловая плитка купить http://napolnaya-probka1.ru/ .
Отличная идея для отдыха или праздника — аренда яхт на выгодных условиях. Наслаждайтесь морем, свободой и заботой команды.
Организация аренды яхты — отличный вариант для любителей приключений на воде. Вам доступен широкий выбор: от быстродействующих яхт до роскошных судов.
Перед тем как арендовать яхту, важно изучить все варианты и предложения. Каждая компания предлагает различные условия аренды, включая цены и дополнительные услуги.
Обязательно проверьте все условия, прежде чем заключать контракт. Следует узнать, что входит в стоимость аренды, а что является дополнительной платой.
Аренда яхты — это шанс провести время с друзьями или семьей и насладиться природой. Независимо от того, выбираете ли вы романтическую прогулку или веселую вечеринку, яхта станет отличной платформой.
Нужен качественный подъемник в Северной столице? Мы — ваш надежный партнер с отличным сервисом по продаже грузовой подъемник санкт петербург.
Современные строительные проекты не обходятся без подъемного оборудования. Оно используется для перемещения тяжелых грузов на высоту и облегчает рабочие процессы.
Подъемное оборудование делится на несколько категорий, таких как подъемники, краны и прочие механизмы. Каждый тип подъемного оборудования находит свое применение в зависимости от специфики работы.
Перед эксплуатацией подъемного оборудования крайне важно провести его тщательный технический осмотр. Регулярный технический осмотр помогает предотвратить поломки и обеспечивает безопасное использование оборудования.
Соблюдение правил использования подъемного оборудования является ключевым фактором безопасности. Только при соблюдении всех инструкций можно гарантировать успешное выполнение задач.
https://t.me/cVavada_vavada
где купить дрова .
Упростите приобретение автопарка с помощью лизинг коммерческих автомобилей. Это решение даёт контроль над расходами и ускоряет запуск проектов.
Лизинг автомобилей для коммерческих нужд является выгодным решением для компаний. Лизинг дает возможность пользоваться новыми автомобилями, не тратя много средств upfront.
Важно отметить, что лизинговые компании часто предлагают выгодные условия по обслуживанию. Таким образом, предприниматели могут сконцентрироваться на развитии бизнеса, не беспокоясь о состоянии автомобилей.
Клиенты также могут выбирать различные условия лизинга. Фирмы могут адаптировать условия лизинга под свои финансовые возможности.
Лизинг может стать полезным инструментом для оптимизации налоговых расходов. Многие предприятия могут списывать платежи по лизингу как расходы, что снижает налоговую нагрузку.
https://t.me/s/TeleCasino_1win/823
https://t.me/s/TeleCasino_1win/673
https://t.me/s/TeleCasino_1win/2023
https://t.me/s/TeleCasino_1win/363
https://t.me/s/TeleCasino_1win/2637
https://t.me/s/Official_casino_1win_1win
Aerial entertainment has evolved. drone light show companies now deliver precision and creativity in one breathtaking package designed for modern audiences.
A drone light show is an innovative way to entertain large crowds. By blending advanced robotics with creative design, these shows provide a unique experience.
Versatility is one of the significant benefits of using drones for light shows. These performances can be tailored for numerous events, ranging from festivals to corporate gatherings.
The ecological footprint of these aerial displays is another critical consideration. Unlike traditional fireworks, which can be harmful to wildlife and air quality, drones emit no pollutants.
As technology continues to evolve, the future of drone light shows looks promising. In the years to come, we are likely to witness increasingly elaborate and coordinated displays.
Thanks for the article. Here’s more on the topic https://mehelper.ru/
kupit-kub-berezovyh-drov-812.ru .
заказать окна заказать окна .
окна в москве best-stroika.ru .
blagoustrojstvo-vezda-na-uchastok-495.ru .
Парфюм с сандалом имеет уникальный и запоминающийся аромат. Сандал мгновенно переносит нас в мир восточных базаров.
Парфюмеры создают широкий ассортимент композиций с использованием сандала. Некоторые композиции подчеркнут сладкие оттенки, а другие — свежие древесные ноты.
Этот компонент часто используется как основа для создания гардений и цветочных ароматов. Сандаловые ароматы популярны среди тех, кто хочет создать атмосферу уюта на вечерних встречах.
Помимо своей уникальной ароматики, сандал обладает и терапевтическими свойствами. Парфюм на основе сандала будет отличным подарком для любителей изысканных ароматов.
парфюм сандал http://www.sandalparfums.ru/
фільми українською мовою топ фільмів 2025 онлайн
дивитися фільми як фільми 2025 онлайн без підписки
https://t.me/s/TeleCasino_1Win/945218
https://t.me/s/TeleCasino_1Win
https://t.me/TeleCasino_1Win/3
https://t.me/TeleCasino_1Win/5
https://t.me/s/TeleCasino_1Win/5
одобрение кредитной карты с плохой кредитной историей http://kreditnye-karty-kg-1.ru .
Here is another site on the topic best free books on kindle unlimited
melbet промокод без депозита melbet промокод без депозита
Impress your guests with a high-tech show drone performance. These synchronized flyers bring dynamic creativity and cinematic visuals to any setting.
The concept of a drone light show represents a cutting-edge form of entertainment. They utilize hundreds of drones to form mesmerizing patterns and shapes overhead.
A major advantage of these shows lies in their ability to adapt to various themes and events. From celebrating holidays to marking special occasions, there seems to be no limit to their applications.
The ecological footprint of these aerial displays is another critical consideration. Unlike traditional fireworks, which can be harmful to wildlife and air quality, drones emit no pollutants.
As technology continues to evolve, the future of drone light shows looks promising. Future shows are set to become even more sophisticated and visually stunning as innovation progresses.
дизайнерские кашпо на стену dizaynerskie-kashpo-sochi.ru .
1win uz promo kod https://www.1win3065.ru
дизайнерские горшки для цветов дизайнерские горшки для цветов .
цветочные горшки дизайнерские купить цветочные горшки дизайнерские купить .
obustrojstvo-vezda-na-uchastok-495.ru .
кашпо стиль кашпо стиль .
plastikovyy-pogreb-812.ru .
кашпо стильные кашпо стильные .
1 вин онлайн http://1win40009.ru
оригинальное кашпо оригинальное кашпо .
дизайнерское кашпо напольное дизайнерское кашпо напольное .
plastikovyy-pogreb-kupit-812.ru .
услуги клиники косметологии в Красноярске услуги клиники косметологии в Красноярске .
дизайнерские кашпо на стену http://www.dizaynerskie-kashpo-nsk.ru/ .
цветочные горшки дизайнерские купить https://dizaynerskie-kashpo-nsk.ru/ .
длинный горшок для цветов с автополивом https://kashpo-s-avtopolivom-kazan.ru/ .
На дверях комнаты № 2 было написано что-то не совсем понятное: «Однодневная творческая путевка. Гей-знакомства: безопасность и современные тенденции Вышел на веранду черноглазый красавец с кинжальной бородой, во фраке и царственным взором окинул свои владения.
заправка газгольдера подмосковье .
дизайнерские цветочные горшки дизайнерские цветочные горшки .
сколько стоит заправка газгольдера 2700 .
кашпо для цветов дизайнерские кашпо для цветов дизайнерские .
zakazat-ushp-fundament-499.ru .
https://t.me/s/official_1go_1go
Современный автопортал https://automobile.kyiv.ua свежие новости, сравнительные обзоры, тесты, автострахование и обслуживание. Полезная информация для водителей и покупателей.
https://t.me/s/Official_1win_official_1win/539
https://t.me/s/Official_1win_official_1win/607
цветочные горшки с поливом https://www.kashpo-s-avtopolivom-kazan.ru .
https://t.me/s/Topchik_1WIN
Арендуйте арендовать машину в пхукете и наслаждайтесь свободой передвижения по этому прекрасному острову!
Взять в аренду автомобиль на Пхукете — идеальный вариант для путешественников. С арендованным автомобилем у вас будет возможность увидеть самые удивительные уголки Пхукета.
Множество прокатных компаний работает на Пхукете. Вы можете выбрать как дорогие автомобили, так и более бюджетные варианты.
Важно учитывать местные правила дорожного движения. На Пхукете движение левостороннее, поэтому будьте внимательны.
Аренда автомобиля на Пхукете — это не только удобно, но и выгодно. С арендованным авто вы можете без труда добраться до всех интересных мест.
https://t.me/s/TgWin_1win/357
https://t.me/s/TgWin_1win/819
цветочный горшок с автополивом купить цветочный горшок с автополивом купить .
zapravka-propan-butanom-gazgoldera-499.ru .
ushp-fundament-10-na-10-499.ru .
На семяныч ру официальный сайт каталог вы найдете широкий выбор семян и полезные советы по их выращиванию.
Ресурс Семяныч ру, имеющий официальный статус, предлагает разнообразные товары и услуги. На этом сайте каждый сможет найти что-то полезное для себя.
Пользователи имеют возможность просмотреть онлайн-каталог и подобрать необходимые товары. Выбор товаров становится проще благодаря удобному интерфейсу каталога.
На Семяныч ру регулярно обновляются акции и специальные предложения для клиентов. Это отличная возможность сэкономить на покупках и получить качественные товары по выгодным ценам.
Клиенты могут рассчитывать на первоклассное обслуживание и поддержку на Семяныч ру. Пользователи могут рассчитывать на быструю помощь от службы поддержки сайта.
семяныч семена магазин официальный сайт предлагает широкий выбор качественных семян для вашего огорода.
Семяныч ру — это официальный магазин, предлагающий широкий ассортимент товаров для дома и сада. В этом магазине можно приобрести все необходимые вещи для уюта и отдыха.
Магазин располагает обширным каталогом, включающим различные товары. Вы сможете найти от садового инвентаря до мелкой бытовой техники.
Официальный магазин гарантирует высокое качество и доступные цены. Приобретая продукцию в Семяныч ру, вы доверяете надежному продавцу.
Также в магазине доступны различные способы оплаты и быстрая доставка. Здесь можно выбрать оптимальный вариант доставки и способ оплаты.
горшок для цветов с автополивом горшок для цветов с автополивом .
заправка газом газгольдера .
Mizuno Wave Rider — it is an ideal choice for running enthusiasts, combining lightness and cushioning.
Mizuno Wave Rider has gained recognition among runners for its superior performance. The key features of this shoe include a lightweight build and excellent cushioning.
One of the standout features of the Mizuno Wave Rider is its Wave technology. This technology provides a unique combination of stability and shock absorption.
The Mizuno Wave Rider is also celebrated for its breathable materials and comfortable fit. The mesh upper allows for adequate airflow, keeping feet cool during runs.
In conclusion, the Mizuno Wave Rider is an excellent choice for those serious about their running. Its combination of impressive technology and comfort makes it a must-have for runners.
Thanks for the article http://www.matchfishing.ru/forumtest/1/showthread.php?t=26205&p=674113#post674113 .
teplyy-fundament-ushp-499.ru .
zaezd-pod-klyuch-365.ru .
купить кашпо для дачи купить кашпо для дачи .
стоимость бетона сколько стоит бетон
Forget about permanent connections and use our temporary phone|temporary number for verification|temporary mobile number|temp phone number free|temp number for verification|temporary phone number|temp text number?|temp phone number online?|temp mobile number?|temp number|temp phone number|temp sms|temporary number|temp number for otp|temporary sms|temporary number for otp|temp sms number|free temporary phone number, to protect your personal information!
The Benefits of Using a Temporary Phone. For travelers, using a temporary phone can be a game-changer. You can sidestep expensive roaming fees and access local networks.
Besides being budget-friendly, temporary phones offer great convenience. You can easily acquire one upon arriving at your destination. They often come with local SIM cards, ensuring that you are readily connected.
Moreover, temporary phones can help safeguard your primary device. As travelers often expose their devices to risks, it’s wise to minimize potential losses. If something happens to your temporary phone, your main device remains untouched and secure.
It’s essential to take various aspects into account when choosing a temporary phone. The duration of your stay and the frequency of your phone use will dictate your option. It’s vital to compare service providers to ensure optimal coverage at your destination.
Discover the perfect balance of comfort and support with asics gel kayano, which is perfect for runners at any distance.
Asics Gel Kayano is a popular choice among runners due to its exceptional comfort and support. The design of this shoe incorporates innovative technology to enhance performance. One of the standout features of the Gel Kayano is its cushioning system. With this technology, runners can enjoy both impact absorption and a smooth ride.
The stability offered by the Gel Kayano is particularly impressive. Preventing overpronation, this feature makes it suitable for various runners. This shoe is particularly advantageous for runners needing extra arch support. In summary, the Gel Kayano merges comfort with support and performance.
The durability of this shoe is another factor contributing to its popularity. The Gel Kayano is constructed from premium materials that endure rigorous training. Runners can depend on this model for long-term wear. With both durability and comfort, this shoe represents a sound investment.
Before purchasing the Asics Gel Kayano, testing them in-store is crucial. Finding the perfect fit is crucial since every person’s foot shape varies. A specialty running store can offer valuable advice. Ultimately, the Asics Gel Kayano could be the perfect shoe for your running needs.
садовое кашпо для цветов садовое кашпо для цветов .
Если вы ищете хороший клининг в москве|клининговые компании рейтинг|клининг в москве рейтинг|лучшие клининговые компании москвы|рейтинг клининговых компаний|лучшие клининговые компании|клининговые компании в москве по уборке квартир рейтинг лучших|клининг рейтинг|топ клининговых компаний москвы|лучший клининг в москве по отзывам|клининговое агентство москва|клининговые компании москвы рейтинг|хороший клининг|топ клининговых компаний в москве|топ клининговых компаний|крупные клининговые компании|клининговые компании москвы список|клининг рейтинг компаний|клининг лучший в москве, обратите внимание на отзывы клиентов и рейтинг профессионализма.
В Москве существует множество клининговых компаний, готовых предоставить свои услуги . Компании предлагают различные виды уборки, в зависимости от потребностей клиентов .
Клининг отличается высоким качеством благодаря современным моющим средствам и оборудованию. Специалисты обучены работать с различными поверхностями, что гарантирует отличный результат .
Рекомендации и отзывы играют важную роль в выборе клининговой компании. Наличие четкой информации помогает лучше понять, что именно предлагает компания.
Прежде чем заказать клининг, уточните, что включено в тарифный план. В результате профессиональной уборки вы получите не только чистоту, но и уют в вашем пространстве.
Получение внж греции для россиян 2025 становится все более популярным среди россиян, стремящихся к новой жизни под солнцем.
Получение ВНЖ в Греции является заветной мечтой для многих. Эти ожидания обоснованы прекрасным климатом, культурным наследием и высоким качеством жизни.
Основные варианты получения ВНЖ в Греции разнообразны. Многие выбирают инвестиционную визу, которая предполагает покупку недвижимости. Каждый путь к ВНЖ имеет свои уникальные особенности и требования.
Первый шаг к получению ВНЖ – это подготовка пакета необходимых документов. Среди нужных документов: паспорт, фотографии, медицинская страховка и подтверждение наличия средств. Важно тщательно подготовить все бумаги, чтобы избежать задержек.
Необходимо учитывать, что процесс получения ВНЖ требует времени. Следует набраться терпения и готовиться к длительному процессу. Однако, после получения ВНЖ перед вами откроются новые горизонты и возможности.
Экран для проектора|Экран для проектора купить|Купить экран для проектора|Проекционный экран|Экран проектора|Экраны для проекторов|Экран для проектора цена|Экраны для проекторов купить|Проекционные экраны|Экран проекционный|Проекционный экран для проектора|Проекционный экран купить|Экран проекционный купить|Экран для видеопроектора|Проекционный экран цена|Купить проекционный экран|Экраны для проектора|Экран проектора купить|Экран для видеопроектора купить|Экраны для проекторов цена идеально подойдет для вашего домашнего кинотеатра!
Экран для проектора — это важный компонент любой презентации. Хорошо подобранный экран обеспечивает зрителям максимум комфорта при просмотре.
Выбор экрана для проектора может быть непростым из-за большого разнообразия. Некоторые экраны отлично подойдут для использования в домашних условиях, в то время как другие — для профессиональных встреч.
Размер и формат экрана — это важные аспекты, на которые следует обратить внимание. Большие экраны лучше подходят для больших залов, а компактные — для небольших помещений.
Качество материала экрана не менее важно, чем его размер. Экраны из качественных материалов гарантируют отличную цветопередачу.
Если вы ищете стильный барбершоп красноярск|барбершоп|барбер|барбершоп рядом|барбершоп красноярск советский район|самый ближайший барбершоп где я нахожусь|барбер красноярск|барбершоп красноярск взлетка|барбершоп красноярск 78 добровольческой бригады|барбершоп красноярск рядом, наш салон предложит вам лучшие услуги по уходу за волосами и бородой.
Барбершопы в Красноярске становятся все более популярными . Посетив барбершоп, вы получите не только стрижку, но и стильный образ. В барбершопах работают опытные мастера, которые восхищают своим мастерством. Индивидуальное внимание к каждому клиенту — это важная часть сервиса.
В Красноярских барбершопах разнообразие услуг приятно удивляет . Разнообразие стилей стрижек удовлетворяет любую потребность. Уход за бородой и усами — важный аспект обслуживания клиентов. Тем не менее, важно выбирать качественные заведения .
Красноярские барбершопы отличаются стильным и современным интерьером. Мастера создают атмосферу комфорта и расслабления . Многие клиенты ценят не только качества услуг, но и атмосферу . Доброжелательное отношение мастеров — это залог хорошего настроения .
Барбершопы Красноярска — это не просто услуги, это целая культура. Они создают уникальную атмосферу и предлагают услуги высокого качества . Причин для посещения барбершопа множество, и каждая из них важна. Не упустите шанс насладиться качественным сервисом в одном из лучших барбершопов Красноярска .
фундаментная плита под ключ цена московская область .
https://t.me/s/play_1win_online
Get your temporary number for otp to register without any hassle!
In today’s fast-paced digital world, privacy has become a significant concern for many individuals . A practical approach to enhance privacy involves utilizing temp numbers.
By using temporary numbers, individuals can communicate without disclosing their real contact information . Such numbers can be produced for brief intervals or particular functions.
One common use of temp numbers is for online registrations . This method can significantly reduce unsolicited calls and messages .
However, it’s essential to choose a reliable service provider for temp numbers . Many services offer free or low-cost temp numbers for various purposes .
In conclusion, temp numbers serve as a valuable tool for maintaining privacy in today’s digital age . By understanding their benefits and applications, users can make informed decisions .
купить уличные кашпо для цветов большие https://www.ulichnye-kashpo-kazan.ru .
Незабываемый отпуск на Черноморском побережье: джубга жилье недорого!
В Джубге вы найдете отличные возможности для отдыха, наслаждаясь живописными пейзажами и множеством интересных занятий. Теплый климат и шикарные виды делают Джубгу привлекательной для туристов любого возраста.
Местные пляжи славятся чистотой и удобством.
Среди местных предложений есть как активные развлечения, так и возможность просто расслабиться на пляже.
Экскурсионные программы в Джубге позволят вам узнать больше о культуре и истории региона. Посещение экскурсионных объектов расширит ваш кругозор и оставит незабываемые впечатления.
Не забудьте попробовать местную кухню, которая порадует даже самых взыскательных гурманов. Кулинарные изыски региона включают свежие морепродукты и уникальные рецепты.
уличный цветочный горшок уличный цветочный горшок .
kupit-drova-v-shchyolkovo-365.ru .
Мы предлагаем качественную печать на футболках|печать на футболке|принт на футболку|принт на футболке|принт на футболки|футболка с принтом на заказ|футболки с принтом на заказ|принт на футболках|футболка со своим принтом|футболки со своим принтом|печать на футболках москва|печать на футболке москва|заказ футболки с принтом|заказать футболку со своим принтом|заказ футболки со своим принтом|заказ футболок со своим принтом|заказать футболки со своим принтом|заказать футболку с принтом|заказ футболок с принтом|заказать футболки с принтом|футболки с надписями на заказ|сделать принт на футболке|сделать принт на футболку по индивидуальным дизайнам!
данное направление привлекает все больше людей. Люди используют печать для создания подарков
vezd-na-dachnyy-uchastok-365.ru .
горшок высокий для цветов купить напольные горшок высокий для цветов купить напольные .
Ищете удобный и доступный способ насладиться вейпингом? Тогда одноразовые электронные сигареты – это то, что вам нужно!
Одноразовые электронные сигареты становятся все более популярными на рынке в последние годы. Одноразовые электронные сигареты привлекают внимание благодаря своей простоте и удобству в использовании.
Часто они рассматриваются как альтернатива традиционным сигаретам. Одной из главных причин их популярности является разнообразие вкусов. Пользователи могут выбирать между фруктовыми, десертными и ментоловыми вкусами. Таким образом, каждый может найти тот вкус, который ему нравится.
Также одноразовые электронные сигареты легко доступны на рынке. Их можно приобрести в магазинах, а также онлайн. Такой подход делает их удобными для пользователей, не желающих заниматься заправкой или обслуживанием устройств.
Несмотря на все положительные стороны, важно помнить о некоторых минусах. Некоторые исследователи утверждают, что одноразовые сигареты могут быть менее безопасными. Также их срок службы значительно короче по сравнению с многоразовыми устройствами.
Получить вануату страна гражданство что дает стало проще благодаря новым правилам и возможностям для инвесторов.
Инвестирование в гражданство Вануату привлекает множество людей. Это связано с его выгодными условиями. Гражданство Вануату дает ряд значительных плюсов.
Возможность свободного передвижения в 130 странах без визы – одно из ключевых преимуществ. Данная особенность привлекает многих туристов. Кроме того, оно дает возможность воспользоваться налоговыми преимуществами.
Процесс получения гражданства сравнительно простой и достаточно быстрый. Инвестирование в экономику является обязательным условием. Для получения гражданства требуется внести минимум 130 тысяч долларов.
Важно отметить, что все процессы можно провести дистанционно. Преимущество дистанционного оформления позволяет многим получить гражданство, не покидая своих стран. Таким образом, Вануату привлекает не только инвестиции, но и потенциальных граждан.
kupit-drova-v-noginske-365.ru .
Постройте свой идеальный каркасный дом|каркасные дома спб|каркасный дом под ключ|каркасный дом спб|каркасный дом под ключ спб|строительство каркасных домов спб|дома каркасные спб|дома каркасные|каркасный дом цена|каркасный дом под ключ в спб|каркасные дома под ключ проекты и цены|строительство каркасных домов в спб|каркасные дома в спб|каркасный дом в спб|строительство каркасных домов в санкт-петербурге|каркасные дома санкт петербург|каркасный дом санкт петербург|строительство каркасных домов в санкт-петербурге|строительство каркасных домов под ключ|каркасные дома спб под ключ|каркасные дома под ключ в спб цены|дом каркасный под ключ|каркасные дома цены|каркасный дом под ключ в спб цена и наслаждайтесь комфортом и уютом в любом уголке Санкт-Петербурга!
Благодаря адаптивной конструкции, жильцы могут реализовать любые идеи в дизайне дома.
купить напольное кашпо для комнатных растений http://www.kashpo-napolnoe-moskva.ru .
Автомобиль Chery цена — оптимальное соотношение цены и качества. Наши модели предлагают премиальные характеристики по доступной стоимости.
doroga-k-uchastku-812.ru .
Запишитесь на seo курсы|курсы сео|курсы seo|подсказка оптимизатор про павел|обучение seo специалист|seo специалист курсы|seo продвижение курсы|seo специалист обучение|seo курсы онлайн|обучение seo|онлайн курсы seo|seo обучение|seo оптимизация обучение|обучение seo с нуля|курс seo|курс seo специалист|seo курс|продвижение сайтов обучение|обучение продвижение сайтов|обучение сео продвижению|курсы seo продвижение|курсы сео продвижение|сео продвижение курсы|seo продвижение курс|seo школа|курсы seo специалист|курсы по продвижению|курсы по seo продвижению|продвижение сайта обучение|seo продвижение обучение|обучение seo продвижению|обучение по продвижению сайтов|seo курсы москва|раскрутка сайта обучение|сео обучение|seo специалист обучение с нуля|курс по продвижению|seo продвижение сайта обучение|обучение сео|seo оптимизация курсы|обучение продвижению сайтов|курсы seo продвижения|курсы seo москва|seo обучение курсы|сео продвижение обучение|курсы продвижения сайтов|курсы сео онлайн|продвижение обучение|курсы по сео|обучение продвижению сайтов с нуля|курсы seo с нуля и начните карьеру в мире цифрового маркетинга!
Тренды и алгоритмы поисковых систем быстро меняются.
купить кашпо напольное купить кашпо напольное .
дренаж под ключ .
дрова колотые береза с доставкой .
Готовые проекты домов становятся все более популярными среди застройщиков.
проекты готовых домов https://gotovye-proekty-domov0.ru/
купить кашпо напольное купить кашпо напольное .
кашпо под цветы напольные кашпо под цветы напольные .
Готовые решения для строительства домов становятся все более популярными среди современных застройщиков. Это связано с удобством таких предложений. Современные технологии и доступность информации сделали проектирование доступным для каждого.
Первый аспект, который стоит рассмотреть, — это множество доступных решений . Доступны как уютные, так и внушительные варианты. Каждый может подобрать проект, соответствующий его нуждам.
Второй важный момент — это готовые и уникальные решения . Если у вас есть определенные пожелания, можно остановиться на индивидуальных решениях . Готовые проекты часто более бюджетные .
Третий аспект — временные и финансовые рамки. Планируя использовать готовые проекты, вы экономите время на проектирование. Это также способствует лучшему управлению финансами .
готовые планировки домов https://gotovye-proekty-domov-0.ru/
кашпо напольное пластик https://www.kashpo-napolnoe-krasnodar.ru .
swot анализ бизнеса swot анализ рынка
Create your perfect online print in just a few clicks with rubber stamp maker online, stamp making online, rubber stamp online maker, stamp maker, online stamp maker, stamp maker online, stamp creator online, make a stamp online, make stamp online, online stamp design maker, make stamps online, stamps maker, online stamp creator, stamp online maker, stamp online maker free, stamp maker online free, create stamp online free, stamp creator online free, online stamp maker free, free online stamp maker, free stamp maker online, make stamp online free — fast, easy and free!
Online rubber stamp makers provide a user-friendly interface for creating professional-looking stamps.
Benefits of Using an Online Rubber Stamp Maker
Many platforms offer quick turnaround times and affordable prices, making it a cost-effective solution.
Steps to Create a Rubber Stamp Online
Choose from available templates or import your own artwork, ensuring a high resolution for a clear stamp.
Choosing the Right Rubber Stamp Maker
Read reviews and compare features across multiple platforms before making a final decision.
На сайте [url=https://make-stamp-1online.com/]rubber stamp maker online|stamp making online|rubber stamp online maker|stamp maker|online stamp maker|stamp maker online|stamp creator online|make a stamp online|make stamp online|online stamp design maker|make stamps online|stamps maker|online stamp creator|stamp online maker|stamp online maker free|stamp maker online free|create stamp online free|stamp creator online free|online stamp maker free|free online stamp maker|free stamp maker online|make stamp online free[/url] you can create and order the stamps you need quickly and efficiently.
that provides a platform for crafting unique and professional-looking stamps. With this innovative technology, individuals can easily create their own custom stamps from the comfort of their homes . The process requires uploading a design, selecting the stamp type, and paying for the order .
The benefits of using a rubber stamp maker online include the convenience of creating stamps at any time . Additionally, the tool allows for the creation of custom stamps in various shapes and sizes. This makes it an ideal solution for businesses and individuals looking for a professional image .
Features of Rubber Stamp Maker Online
The rubber stamp maker online offers a variety of features that make it stand out from traditional stamp-making methods . One of the key features is the capability to add images and graphics to the stamp design. This allows users to create truly unique and personalized stamps .
Another feature is the ability to choose the ink color and type. This makes it possible for individuals to experiment with different materials and designs. Furthermore, the website provides a customer support team that assists with any questions or issues .
Benefits of Using Rubber Stamp Maker Online
Using a rubber stamp maker online offers numerous benefits, including convenience and flexibility . One of the main benefits is the option to design and order stamps at any time . This saves time and effort .
Another benefit is the wide range of design options and templates available . This enables users to create truly unique and personalized stamps . Additionally, the website offers a efficient way to order stamps in bulk .
Conclusion and Future of Rubber Stamp Maker Online
In conclusion, the rubber stamp maker online is a game-changer for individuals and businesses looking to create custom stamps . The future of rubber stamp maker online looks promising, with advancements in technology and design . As the demand for custom stamps continues to grow , the rubber stamp maker online will continue to play a vital role in the world of custom stamp-making .
The potential applications include everything from official documents to creative projects. As the user base grows and becomes more diverse, the rubber stamp maker online will continue to revolutionize the way we create and use custom stamps . Whether an artist looking to explore new creative possibilities, the rubber stamp maker online is a great option to explore.
Если вы хотите найти подходящий вариант для своей машины и при этом сэкономить, тогда стоит [url=https://kupit-shini-v-spb.ru/]зимние шины купить|зимние шины спб|купить зимние шины спб|зимние шины в спб|купить зимние шины в спб|зимняя резина спб купить|зимняя резина в спб купить|купить шины зима|зимние колёса купить|петербург зимние шины|шины зимние в петербурге|шины зимние в санкт петербурге|купить зимние шины недорого|купить недорогие зимние шины|зимняя резина дешево|купить дешево зимнюю резину|купить автошины зимние|шины зимние со склада|купить зимнюю резину в спб недорого|комплект зимней резины купить|продажа зимних шин в спб[/url], поскольку это позволит вам выбрать лучшее качество по оптимальной цене.
Зимние шины необходимы для безопасного вождения в снежных и ледяных условиях . При правильном выборе зимних шин можно значительно снизить риск аварий и улучшить сцепление с дорогой Зимние шины повышают безопасность вождения и могут предотвратить скольжение на ледяных дорогах . Кроме того, зимние шины могут улучшить управляемость транспортного средства и снизить риск заноса Зимние шины помогают улучшить управляемость транспортного средства и могут предотвратить занос на поворотах .
Зимние шины также могут снизить риск повреждения транспортного средства и других объектов на дороге Зимние шины могут снизить риск повреждения транспортного средства и других объектов на дороге . При выборе зимних шин необходимо учитывать такие факторы, как глубина протектора, тип протектора иMaterial изготовления шин Зимние шины должны иметь глубокий протектор и специальный тип протектора для лучшего сцепления с дорогой .
Типы зимних шин
Существует несколько типов зимних шин, каждый из которых имеет свои преимущества и недостатки Существует несколько видов зимних шин, каждый из которых предназначен для конкретных условий вождения . Например, стudded шины имеют металлические шипы, которые обеспечивают лучшее сцепление с дорогой на льду Studded шины имеют металлические шипы, которые могут повредить дорожное покрытие, но обеспечивают лучшее сцепление с дорогой. Однако, такие шины могут быть запрещены в некоторых регионах из-за повреждения дорожного покрытия Studded шины могут быть разрешены только в определенных условиях вождения.
Другой тип зимних шин — studless шины, которые не имеют металлических шипов Studless шины не имеют металлических шипов, но обеспечивают лучшее сцепление с дорогой на мокрых поверхностях. Такие шины более тихие и комфортные, чем studded шины, но могут быть менее эффективными на льду Studless шины обеспечивают лучшую стабильность и управляемость на зимних дорогах, но могут быть менее эффективными на снегу .
Как выбрать зимние шины
При выборе зимних шин необходимо учитывать несколько факторов, включая тип транспортного средства, условия вождения и личные предпочтения При выборе зимних шин необходимо учитывать такие факторы, как глубина протектора, тип протектора и материал изготовления шин . Например, если вы живете в регионе с сильными снегопадами, вам может потребоваться более агрессивный тип шин Если вы живете в регионе с сильными снегопадами, вам может потребоваться более прочный материал изготовления шин.
Кроме того, необходимо учитывать размер шин и тип шин, которые подходят вашему транспортному средству Необходимо учитывать такие факторы, как размер шин, тип шин и производитель . Также важно прочитать отзывы и сравнить цены разных производителей Также важно проверить качество шин и сравнить цены разных моделей .
Где купить зимние шины
Зимние шины можно купить в различных магазинах и интернет-магазинах Зимние шины можно приобрести в специализированных магазинах и онлайн-магазинах . Например, можно посетить магазины, такие как ОЗОН, Wildberries или Авторусь Можно посетить специализированные магазины, такие как шинные центры или автосалоны. Также можно проверить официальные сайты производителей, такие как Michelin, Continental или Nokian Также можно проверить сайты онлайн-магазинов, такие как Amazon или eBay.
При покупке зимних шин необходимо проверить качество и соответствие шин вашему транспортному средству При покупке зимних шин необходимо проверить цены и качество шин. Кроме того, необходимо учитывать такие факторы, как доставка и установка шин Необходимо учитывать такие факторы, как гарантия и качество обслуживания.
лучшие нейросети для написания эссе
Get temporary phone number|temporary number|temporary phone number for verification|free temporary phone number|temporary sms|temporary number for otp|temporary mobile number|temporary numbers|temporary phone|temp number|temp phone number|temp sms|temp phone|receive sms, to stay one step ahead in online security and anonymity.
as they allow individuals to create a barrier between their personal and public lives. This trend is largely driven by the growing concern over privacy and the need to protect oneself from unwanted contacts in the era of social media and online interactions. Moreover, temporary phone numbers are also used for various purposes such as testing and verifying websites and applications.
The use of temporary phone numbers is not limited to individuals; businesses also utilize them to manage their customer service operations. Companies can create temporary phone numbers for specific marketing campaigns . Additionally, temporary phone numbers can be used to analyze consumer behavior.
Benefits of Using Temporary Phone Numbers
One of the primary benefits of using temporary phone numbers is the enhanced security they provide by reducing the risk of identity theft and fraud. Temporary phone numbers can also be used to avoid spam and telemarketing calls . Furthermore, temporary phone numbers are accessible from anywhere with an internet connection .
In addition to security and convenience, temporary phone numbers also offer flexibility in terms of the services they can be used with . Users can easily create and delete temporary phone numbers . Moreover, temporary phone numbers can be used to stay connected with others while maintaining privacy .
How Temporary Phone Numbers Work
Temporary phone numbers work by providing a virtual phone number that forwards calls and messages to a user’s real phone number . These numbers are often free or low-cost . The process of obtaining a temporary phone number is involves creating an account with a service provider .
Once a temporary phone number is obtained, it can be used within a few minutes of signing up. Users can then make calls and send messages from their temporary phone number . Additionally, temporary phone numbers can be easily renewed or extended .
Conclusion and Future of Temporary Phone Numbers
In conclusion, temporary phone numbers have become an essential tool for maintaining privacy and security in online interactions. As technology continues to evolve, the use of temporary phone numbers is likely to play a crucial role in online communications. The future of temporary phone numbers looks full of opportunities.
The demand for temporary phone numbers is expected to increase significantly in the coming years. This is due to the expanding use of online services and applications. As a result, service providers will need to develop new and innovative solutions . Moreover, temporary phone numbers will evolve to meet the changing needs of users.
порно русские мамки красивое русское порно
Want to have fun? porno girl Watch porn, buy heroin or ecstasy. Pick up whores or buy marijuana. Come in, we’re waiting
Новые актуальные промокоды iherb 2025 для выгодных покупок! Скидки на витамины, БАДы, косметику и товары для здоровья. Экономьте до 30% на заказах, используйте проверенные купоны и наслаждайтесь выгодным шопингом.
kupit-drova-v-samare-365.ru .
Service [url=https://stamp-1creator.com/]rubber stamp maker online|stamp making online|rubber stamp online maker|stamp maker|online stamp maker|stamp maker online|stamp creator online|make a stamp online|make stamp online|online stamp design maker|make stamps online|stamps maker|online stamp creator|stamp online maker|stamp online maker free|stamp maker online free|create stamp online free|stamp creator online free|online stamp maker free|free online stamp maker|free stamp maker online|make stamp online free[/url] allows you to create and order stamps online.
The internet has made it easier for people to access rubber stamp makers and create their own custom stamps. The process of creating a rubber stamp online is straightforward and requires minimal effort the website will then guide the user through the process of customizing their stamp . it is also a fun and creative way for people to express themselves .
One of the benefits of using a rubber stamp maker online is the convenience it offers . The online rubber stamp maker also offers a wide range of design options and templates . In addition to the convenience and design options, the rubber stamp maker online is also cost-effective .
How to Use a Rubber Stamp Maker Online
the website will provide options for customizing the stamp, including the size and material. users can upload their own image or use a pre-made template . they will be asked to provide their contact and payment information .
they can also add additional features, such as a handle or a ink pad. the tools include features such as text editing and image uploading. the website is easy to navigate and provides clear instructions.
Benefits of Using a Rubber Stamp Maker Online
this makes it ideal for people who are short on time or have busy schedules. users can choose from a variety of fonts, colors, and images to create their custom stamp . In addition to the convenience and design options, the rubber stamp maker online is also environmentally friendly .
it provides them with a cost-effective way to create custom stamps for their documents . users can use these tools to promote their business and increase their online presence . In addition to the marketing tools, the rubber stamp maker online also offers a range of customer support options .
Conclusion
users can create and order their custom stamps from anywhere with an internet connection. The online rubber stamp maker is a great resource for businesses, individuals, and organizations that need to create custom stamps for their documents . The rubber stamp maker online is a user-friendly platform that makes it easy for people to create their own custom stamps .
The rubber stamp maker online is also a cost-effective way to create custom stamps . users can choose from a variety of fonts, colors, and images to create their custom stamp . it is convenient, cost-effective, and customizable .
Если вы ищете [url=https://kupit-zimnie-shipovannie-shini.ru/]зимние шины шипованные|зимняя резина шипованная|резина зимняя шипованная|купить шины шипованные|купить шипованные шины|купить шипованную резину|шины зимние шипованные купить|зимняя резина шипованная купить|зимняя шипованная резина спб|шипованные шины цена|купить зимнюю шипованную резину в санкт петербурге|автошины шипованные|шипованная резина зима|автошины зимние шипованные|недорогая зимняя шипованная резина|недорогая шипованная резина|авторезина шипованная|шипованная резина новая купить|купить зимнюю резину в спб недорого шипованную|покрышки зимние шипованные купить спб[/url], у нас есть отличный выбор по доступным ценам!
Выбор зимних шин — это индивидуальный процесс.
Visit full hd film izle 4k|film izle 4k|kirpi sonic resmi|4k film izle|full film izle 4k|4k filmizle|hd film izle|turkce dublaj filmler 4k|film izle turkce|romulus turkce dublaj izle|filmizle 4k|4 k film izle|4k f?lm ?zle|4k turkce dublaj filmler|k?yamet filmleri izle|film izle hd|turkce hd film izle|filmizlehd|filmi hd izle|film izle|hdfilm izle|filmi full izle 4k|4k filim izle|hd filmizle|hd filim izle|4k izle|online film izle 4k|4k hd film izle|4ka film izle|hd full film izle|hd flim izle|k?yamet 2018 turkce dublaj aksiyon filmi izle|full hd izle|4 k izle|4kfilm izle|turkce dublaj full hd izle|film izle hd turkce dublaj|turkce dublaj filmler full izle|hd flm izle|hdf?lm ?zle|4k flim izle|hd izle|hd turkce dublaj izle|s?k?ysa yakala|hd film izle turkce dublaj|4k izle film|sonsuz s?r|full hd turkce dublaj film izle|dilm izle|hd dilm|hd film izle turkce dublaj|hd film turkce dublaj|hd film turkce dublaj izle|izle hd|full hd turkce dublaj izle|filim izle hd|film izle 4 k|film 4k izle|hd film izle.|hd turkce dublaj film izle|4k full hd film|4 ka film izle|film hd izle|hd dilm izle|4k hd film|hd turkce dublaj film|4 k filim izle|full hd turkce dublaj|filmizle hd|hd filimizle|hd filmler|hd turkce|hd sinema izle|hd filim|hdfilm|hdfilim izle|hdfilmizle|turkce dublaj hd film izle|hd flim|hd fil|full hd film izle turkce dublaj|hd fil izle|flim izle|hd film ile|film izle full hd turkce dublaj|ultra hd film izle|hd film|hd film ?zle|hd film ize|full izle|hd film.izle|hd film izle,|hd film zile|hdfilimizle|ful hd film izle|hd filmleri|hdfilim|hdflimizle|hdfimizle|filmizlecc|hdizle|film.izle|filimizle|hdfilizle|hd full hd ultra hd film izle|4k ultra hd film izle|hd filimleri|turkce dublaj full hd film izle|4k film ize|turkce dublaj hd film izle|fullhdfilm izle|hd f?l?m ?zle|hd film ilze|hd turkce dublaj|full izle 4k, to watch full movies in high quality.
With the integration of Full HD film izle 4K into home entertainment systems, viewers can now enjoy their favorite movies in the comfort of their own homes, with a level of quality that was previously only available in cinemas.
Benefits of Watching Full HD Film Izle 4K
With the rise of streaming services, viewers can now access a wide range of Full HD film izle 4K content from the comfort of their own homes, without the need to visit a cinema.
How to Watch Full HD Film Izle 4K
With the rise of Full HD film izle 4K, the film industry is also becoming more diverse, with a range of movies and TV shows available in different languages and genres.
Conclusion and Future of Full HD Film Izle 4K
Whether it’s the latest blockbuster or a classic movie, Full HD film izle 4K brings the movie to life in a way that is both captivating and engaging.
Сувенирная продукция, представленная [url=https://suvenirnaya-produktsiya-spb-0.ru/]корпоративные подарки|сувенирная продукция|сувенирная продукция спб|сувениры с логотипом на заказ|изготовление сувенирной продукции|бизнес сувениры с логотипом|бизнес сувениры|сувенирная продукция с логотипом|корпоративные сувениры с логотипом|сувениры на заказ|сувенирная продукция с логотипом на заказ|бизнес сувениры спб|сувенирная продукция брендированная|корпоративные сувениры|изготовление сувениров с логотипом|бизнес подарки с логотипом|заказ сувенирной продукции с логотипом|сувениры корпоративные|корпоративный сувенир|брендированная продукция с логотипом[/url], станет отличным решением для вашего бизнеса и поможет создать уникальный имидж.
Товары на память
Для тех, кто интересуется службами замены материнства в столице России, существует множество возможностей найти информацию о суррогатное материнство в москве|суррогатная мать москва|суррогатное материнство цена в москве|суррогатная мать цена москва|сколько стоит суррогатное материнство в москве|сколько стоит суррогатное материнство в москве цена|стану суррогатной матерью в москве|стать суррогатной матерью в москве|суррогатная мама москва|стоимость суррогатного материнства в москве|услуги суррогатной матери москва|сколько стоит суррогатная мать в москве|услуги суррогатной матери цена москва|стану суррогатной мамой москва|стать суррогатной мамой москва|стать суррогатной матерью в москве цены|стоимость суррогатной матери в москве|найти суррогатную мать в москве|суррогатная мама цена в москве|суррогатное материнство в москве под ключ|стоимость услуг суррогатной матери в москве|сколько платят суррогатным матерям в москве|цена суррогатного материнства в москве под ключ|сколько стоят услуги суррогатной матери в москве|услуги суррогатной матери цена москва под ключ|хочу стать суррогатной матерью в москве|найти суррогатную мать цена москва|стать суррогатной мамой в москве цена|стоимость суррогатного материнства в москве под ключ|суррогатное материнство в москве мирсурмам, что может включать различные варианты услуг по помощи в зачатии и вынашивании детей для семей, которые по каким-то причинам не могут иметь детей естественным путем.
Суррогатное материнство в Москве требует тщательного рассмотрения этими аспектами.
Юридические Аспекты
Юридические аспекты суррогатного материнства в Москве играют решающую роль в процессе.
Медицинские Аспекты
Суррогатное материнство в Москве включает в себя комплексную медицинскую поддержку на всех этапах.
оциальные и Психологические Аспекты
В Москве суррогатное материнство становится все более приемлемым и понятным.
Bakmak hd filim.
4K kalitede film izlemenin avantajları. Günümüzde, film izleme deneyimi büyük bir değişim geçirdi. Bu iki format, izleyicilerin deneyimlerini zenginleştirir. Her iki format da sinema deneyimini üst düzeye taşır.
4K film izlemek için gereken donanım, biraz maliyetli olabilir. Ancak, sağlanan görüntü kalitesi buna değebilir. Ayrıca, Full HD izlemek de mükemmel bir seçenek olabilir. Her film sever, kendi tercihine göre kalite seviyesini seçebilir.
Film izlemek isterseniz, birçok seçenek sizi bekliyor. Netflix, Amazon Prime ve diğer dijital platformlar, Full HD ve 4K seçenekleri sunar. Bu platformlarda, geniş bir film yelpazesi sunulmaktadır. Film seçme süreci, kişisel tercihlere bağlıdır.
Film izlemek, hayatımızın önemli bir eğlence kaynağı haline geldi. İzleme kalitenizi artırmak, sinema deneyiminizi derinleştirir. Dolayısıyla, film izlerken tercihlerinizi belirlemek önemlidir. Sinema dünyasının tadını çıkararak, yeni filmleri keşfetmek için hazır olun.
Bakmak 4 k izle ve mükemmel kalitenin tadını çıkarın!
Full HD film izlemek için doğru platformu seçmek kritik. Detaylı görseller sunan yüksek kaliteli filmler, eğlencenizi büyük ölçüde artırabilir. 4K filmleri tercih etmek için kaliteli bir TV kullanmanız gerekmektedir. Bu sağlanmazsa, filmlerin tadını yeterince çıkaramazsınız.
Birçok platform, 4K film seçeneği sunuyor. Bu platformlar, sıklıkla kullanıcı dostu arayüzler ile film izleyicilerine kolaylık sağlamaktadır. Çeşitli film seçenekleri ile dikkat çeken bu platformlardan birkaçı, ücretsiz olarak hizmet vermektedir. İzlemek istediğiniz filmi bulmak için bu platformları keşfetmek harika bir seçenek.
Sinema keyfi için bir diğer önemli faktör ise doğru ses sistemidir. 4K filmler, görsel olarak etkileyici hale gelmesine karşın, ses kalitesi de bir o kadar. Güzel bir ses sistemi ile film deneyiminizi bir üst seviyeye çıkarmak mümkündür. Bu nedenle film izlemeye hazırlanmadan önce, ses düzenlemenizi gözden geçirin.
Son olarak, 4K film izlemek, sadece bir eğlence değildir. Bu, sanatın bir parçasıdır. Her yapım, seyirciye bir şeyler katmayı amaçlamaktadır. Uyku, stres ve günlük hayatın telaşından uzaklaşmak için, iyi bir film seçimi yapmak önemlidir. Unutmayın, film izleme deneyiminiz, seçtiğiniz içerikle ilgilidir.
Get get sms and protect your personal information.
Locating a fake phone number for verification purposes can prove to be challenging in today’s digital landscape. Many online services require a valid phone number to confirm your identity, which can cause privacy concerns. However, using a fake phone number can allow you to uphold your privacy while accessing necessary services.
Virtual phone numbers can serve as effective tools for verification. These temporary options allow you to obtain required SMS messages without revealing your real number. Many websites offer these services, making it convenient to find a suitable fake phone number when needed.
Opting for a service, it’s important to evaluate the reliability and security they offer. Seek platforms that have high ratings to ensure a smooth experience. Furthermore, some services might charge fees, so be sure to check their pricing structures before proceeding.
To summarize, using a fake phone number for verification can safeguard your identity. If you select a reputable platform, you can benefit from the freedom this method offers. Keep updated about the best services available, and protect yourself online.
Looking for an experienced next.js + react developer for your project?
Many developers are now turning to Next.js as their go-to framework. One of the major advantages of this framework is its ability to create server-rendered applications.
One key feature of Next.js is its automatic code splitting, improving app performance. This functionality ensures that only the code required for a specific page is loaded, resulting in quicker loading times.
Another significant feature of Next.js is its built-in routing. Creating dynamic routes is straightforward, requiring minimal configuration.
In addition to features, the Next.js community is vibrant and supportive. Many resources, including forums and tutorials, are accessible to help developers tackle issues.
Use our temporary number, to quickly and easily receive SMS messages without having to provide your permanent number.
The Benefits of Using a Temporary Phone Number have become increasingly popular in recent years. Using a temporary phone number can greatly enhance your privacy while communicating. Many people are turning to this solution for various reasons, including online transactions and dating apps.
One primary advantage of a virtual phone number is its ability to protect your identity. This not only keeps your primary number safe but also helps you manage your communications more effectively. For instance, if you’re selling items online, a temporary number lets you communicate with buyers without exposing your personal details.
Creating a disposable phone number typically involves a simple process. There are many apps and services available that can provide you with a temporary number quickly. After selecting a provider, you can often choose the area code or number format you prefer. The best part is that you can usually discard this number when you no longer need it.
However, there are some drawbacks to using these numbers. For instance, some services may restrict the types of messages you can receive or the duration for which the number remains active. Additionally, certain platforms may not accept temporary numbers for account verification. Ultimately, weighing the pros and cons can help you determine whether a temporary phone number is right for you.
By using temp text number? you can quickly and conveniently receive SMS without having to use a personal number.
The versatility of online SMS offerings makes them appealing to a wide range of users.
Закажите доставку алкоголя круглосуточно и наслаждайтесь любимыми напитками в любое время!
Доставка алкогольной продукции — это решение для тех, кто ценит свое время. На рынке существует множество сервисов для доставки алкогольных напитков .
Разнообразие алкогольных напитков приятно удивляет. В ассортименте есть и пиво, и вино, и крепкие напитки .
Доставка алкоголя имеет множество плюсов. Во-первых, это экономия времени . Вам не нужно выходить из дома, чтобы насладиться любимыми напитками .
Не забывайте о безопасности при доставке алкоголя . Проверьте, чтобы доставку осуществлял надежный сервис . Не забывайте о законодательных ограничениях по возрасту.
лучшие нейросети для написания рэпа
Для безопасной и комфортной езды в зимних условиях рекомендуем обратить внимание на автошины зимние шипованные.
В зимний период выбор шины становится особенно актуальным. Шипованные зимние шины пользуются огромной популярностью. Они обеспечивают отличное сцепление на скользкой поверхности. Эти шины позволяют водителям быть более уверенными на дороге.
Однако, важно правильно выбрать шипованные шины. Существует несколько важных аспектов, на которые стоит обратить внимание. Ключевыми факторами являются размер, тип и назначение шины. Неправильно подобранные шины могут привести к неприятным последствиям.
Известные бренды предлагают разнообразие шипованных шин. Обязательно стоит обратить внимание на отзывы и рейтинги. Шины должны сочетать в себе надежное сцепление и долговечность. Важно учитывать этот фактор при выборе шины.
Правильная эксплуатация шипованных шин поможет продлить их срок службы. Регулярная проверка давления и состояния протектора является необходимой. Также старайтесь избегать резких маневров на скользкой дороге. Это позволит не только продлить срок службы шин, но и повысить уровень безопасности на дороге.
Create a unique stamp with our [url=https://stamp-1creator.com/]make stamp online free[/url]!
Businesses and individuals alike are looking for ways to simplify their processes. Rubber stamps are pivotal in numerous situations.
A variety of websites provide tailored solutions to meet diverse requirements. Users can create stamps that embody their personal touch. The process is generally straightforward and user-friendly.
As soon as the design is confirmed, the creation process moves forward efficiently. Numerous digital stamp manufacturers promise that their items meet exceptional standards. Customers can look forward to sturdy products that endure over time.
Ultimately, choosing an online rubber stamp creator is vital for productivity. With so many alternatives, users can identify the most suitable option for their preferences. The convenience of online services cannot be overstated.
Забронируйте стрижку в нашем [url=https://barbershop-krasnoyarsk.ru]барбер красноярск[/url] уже сегодня и преобразите свой стиль!
В Красноярске наблюдается рост интереса к барбершопам. Местные жители ищут качественные услуги стрижки и ухода за бородой .
Подбор барбершопа — это серьезное дело. Необходимо учитывать квалификацию мастеров и отзывы клиентов .
Каждый барбершоп предлагает уникальный подход к клиентам . Некоторые заведения фокусируются на классических стилях, в то время как другие предлагают современные тенденции .
Лучше заранее забронировать время на стрижку, чтобы избежать долгого ожидания. Забота о волосах и бороде между визитами в барбершоп также важна.
Если вам нужна удобная и комфортабельная поездка, аренда авто с водителем новосибирск станет отличным решением!
Вы можете сделать это через наш сайт или позвонить нам.
Планируя летний отдых, многие туристы интересуются лазаревское отдых, чтобы выбрать лучший вариант для себя.
славится своими прекрасными пляжами и чистым морем. Основная привлекательность этого места заключается в его уникальном сочетании природной красоты и развлекательных возможностей. Лазаревское известно своей возможностью насладиться водными видами спорта и экскурсиями .
Городской инфраструктура включает в себя множество ресторанов, магазинов и развлекательных заведений. Здесь есть много вариантов жилья на любой вкус и кошелек . Кроме того, в Лазаревском организуются различные фестивали и культурные мероприятия на протяжении всего года .
Цены на различные услуги в Лазаревском могут меняться с учетом спроса и предложения. Проживание в отелях и гостиницах может стоить от нескольких тысяч рублей за ночь в бюджетных вариантах . Кроме того, цены на экскурсии и развлекательные мероприятия могут стоить дополнительно .
Для тех, кто планирует посетить Лазаревское, будет полезно сравнить цены на различные услуги и выбрать наиболее выгодные варианты . Это позволит выбрать оптимальный вариант отдыха, соответствующий личным предпочтениям и финансовым возможностям.
Лазаревское славится разнообразными историческими и культурными памятниками, такими как музеи и старинные замки . Посетители могут принять участие в организованных экскурсиях по археологическим объектам и природным заповедникам.
В городе проводятся фестивали и концерты, которые привлекают туристов и местных жителей . Каждый сможет расширить свой кругозор, посетив культурные мероприятия и??ические места.
Для путешественников, планирующих посетить Лазаревское, будет полезно изучить местную культуру и обычаи, чтобы избежать непредвиденных ситуаций . Также будет неплохо иметь при себе аптечку и средства от солнца и насекомых .
Лазаревское — это отличный выбор для тех, кто ищет комфортный и насыщенный отдых на море. Путешественники могут получить незабываемые впечатления и воспоминания .
Абхазия — популярное место для летнего абхазия отдых 2025, где можно насладиться прекрасными пляжами, чистым морем и богатой историей.
Абхазия — это республика с богатой историей, расположенная на побережье Черного моря. Отдых в Абхазии позволяет насладиться уникальной природой и историческими памятниками. В Абхазии есть много возможностей для активного отдыха и развлечений.
Республика Абхазия имеет уникальную природу и климат . Отдых в Абхазии — это уникальная возможность познакомиться с местной культурой . В Абхазии можно насладиться прекрасными пейзажами и чистым морем.
Абхазия славится красивыми пейзажами и богатой культурой. Основные курорты Абхазии — это Гагра, Сухум и Пицунда. Отдых на курортах Абхазии позволяет насладиться прекрасными пляжами и чистым морем . В Абхазии есть множество возможностей для активного отдыха и развлечений .
Пляжи Абхазии — это красивые и богатые. Отдых на пляжах Абхазии позволяет насладиться солнцем и морем . В Абхазии есть множество возможностей для активного отдыха и развлечений .
Абхазия имеет множество интересных мест для посещения . Основные достопримечательности Абхазии — это озеро Рица, Новоафонский монастырь и водопады . Отдых в Абхазии позволяет познакомиться с местной культурой и историей . В Абхазии можно насладиться прекрасными пейзажами и чистым морем.
Достопримечательности Абхазии — это красивые и богатые. Отдых в Абхазии позволяет насладиться солнцем и морем . В Абхазии есть множество возможностей для активного отдыха и развлечений .
Инфраструктура Абхазии уникальна и интересна . Основные виды развлечений в Абхазии — это активный отдых, экскурсии и водные развлечения . Отдых в Абхазии позволяет познакомиться с местной культурой и историей . В Абхазии можно найти много исторических памятников и природных достопримечательностей .
Развлечения в Абхазии — это уникальные и интересные . Отдых в Абхазии позволяет насладиться солнцем и морем . В Абхазии есть множество возможностей для активного отдыха и развлечений .
Если вы ищете [url=https://otdyh-v-adlere1.ru/]отдых в адлере без посредников[/url], то вам стоит рассмотреть варианты прямого бронирования, чтобы сэкономить на посреднических услугах и найти наиболее подходящий вариант для вашего отдыха.
Адлер является одним из наиболее посещаемых курортных городов в России, привлекающим большое количество туристов своей природной красотой и разнообразием отдыха . Здесь можно найти множество пляжей, парков и других мест для отдыха кроме того, в городе есть множество современных отелей и гостиниц, предлагающих комфортные условия для проживания. Отдых в Адлере без посредников — это отличная возможность сэкономить деньги и спланировать свой отдых по своему усмотрению отсутствие посредников позволяет более гибко планировать свой отдых и выбирать наиболее интересные и доступные варианты .
Адлер предлагает широкий спектр возможностей для отдыха на любой вкус и бюджет здесь можно найти как дорогие и роскошные отели, так и более бюджетные варианты жилья, включая гостиницы, хостелы и апартаменты . Посетители могут насладиться красивыми пляжами, прогуляться по набережной и посетить знаменитый парк «Северное» это место является обязательным для посещения для всех, кто отдыхает в Адлере . Отдых в Адлере без посредников также дает возможность познакомиться с местной культурой и историей кроме того, в Адлере регулярно проводятся различные фестивали и праздники, на которых можно почувствовать атмосферу местной культуры.
Пляжи Адлера — это одно из главных достопримечательностей города на некоторых пляжах также имеются водные аттракционы и занятия, такие как парапланеризм и каякинг. Посетители могут выбрать один из многих пляжей, каждый из которых имеет свои уникальные особенности пляж «Черноморское» предлагает более оживленную обстановку и широкий спектр водных развлечений . Отдых на пляжах Адлера без посредников позволяет максимально расслабиться и насладиться солнцем и морем кроме того, туристы могут самостоятельно выбирать и бронировать экскурсии и занятия, связанные с водными видами спорта .
Водные развлечения в Адлере также разнообразны и доступны посетители могут насладиться катанием на водных горках, посетить волновой бассейн или расслабиться в зоне гидромассажа . Отдых в Адлере без посредников дает возможность более детально изучить все предложения и выбрать то, что лучше всего соответствует вашим потребностям и бюджету также стоит отметить, что отсутствие посредников позволяет более гибко планировать свой маршрут и выбирать наиболее интересные и доступные варианты .
Адлер предлагает широкий спектр экскурсий и культурных достопримечательностей посетители могут ознакомиться с экспонатами, посвященными природе, историческому прошлому и традициям местного населения . Отдых в Адлере без посредников позволяет более детально изучить все предложения и выбрать наиболее интересные и доступные варианты благодаря прямой связи с туроператорами и экскурсоводами, можно более выгодно бронировать экскурсии и получать более?ную информацию о достопримечательностях .
Посетители могут совершить экскурсию по историческим местам Адлера например, можно посетить древние крепости, которые свидетельствуют о богатом историческом прошлом региона . Отдых в Адлере без посредников дает возможность более полно насладиться отдыхом и получить незабываемые впечатления также стоит отметить, что прямая бронирование жилья и экскурсий позволяет более эффективно использовать свое время и средства .
Для того, чтобы спланировать отдых в Адлере без посредников, необходимо учесть несколько важных моментов сначала необходимо подобрать подходящее жилье, которое будет соответствовать вашим потребностям и бюджету . Отдых в Адлере без посредников требует некоторой организации, но дает много преимуществ это дает возможность более полно насладиться отдыхом и получить незабываемые впечатления.
Посетители должны позаботиться о том, чтобы иметь все необходимые документы для отдыха кроме того, стоит изучить информацию о местных традициях и обычаях, чтобы не нарушать местные нормы и правила. Отдых в Адлере без посредников — это отличная возможность сэкономить деньги и спланировать свой отдых по своему усмотрению благодаря отсутствию посредников, можно более детально изучить все предложения и выбрать то, что лучше всего соответствует вашим потребностям и бюджету .
Хотите стать профессионалом в области интернет-маркетинга? Запишитесь на сео специалист курс и начните свой путь к успеху!
Курсы SEO стали неотъемлемой частью цифрового маркетинга. В современном мире знания о SEO крайне полезны для успешного продвижения сайтов. Подобные обучающие программы помогают освоить основные техники и стратегии, которые открывают путь для увеличения видимости в поисковых системах.
На уроках по SEO зачастую рассматриваются ключевые аспекты: от анализа ключевых слов до оптимизации контента. Студенты учатся о том, как правильно редактировать мета-теги и использовать внутреннюю перелинковку. Практически ориентированные упражнения помогают закрепить полученные знания.
Кроме того, во время курсов акцентируется внимание на аналитике. Это охватывает изучение инструментов веб-аналитики для отслеживания эффективности SEO-кампаний. Обучающиеся научатся понимать, какие метрики важны для оценки результатов.
По итогам обучения студенты обычно получают сертификаты. Сертификат подтверждает их умения и знания в области SEO. Данное подтверждение может значительно улучшить резюме и повысить шансы на трудоустройство. Курсы по SEO — это инвестиция в будущее каждого специалиста в области цифрового маркетинга.
идею, основанную на принципах устойчивого развития . Эта концепция применяется для оптимизации бизнес-процессов и снижения воздействия на окружающую среду . Основная цель jhl — укрепить позиции компаний на рынке за счет инноваций .
jhl также помогает в развитии стратегий устойчивого развития. Это достигается за счет использования экологически чистых материалов и ресурсов . Кроме того, jhl способствует развитию экологической осведомленности среди населения .
Применение jhl даже в небольших масштабах может иметь существенное положительное воздействие на окружающую среду . Это достигается за счет обучения и повышения квалификации сотрудников . jhl обеспечивает более устойчивое и экологически чистое будущее.
jhl уже вдохновило многих предпринимателей и лидеров на принятие решений, способствующих устойчивому развитию. При этом, jhl не только снижает негативное воздействие на окружающую среду, но и способствует повышению качества жизни населения .
Влияние jhl на бизнес является ключевым фактором в формировании имиджа и репутации компании . jhl также способствует привлечению инвесторов и партнеров, ценящих устойчивое развитие.
jhl должен стать неотъемлемой частью бизнес-стратегии любой компании . Кроме того, jhl обеспечивает компаниям высокую степень гибкости и адаптивности в условиях постоянно меняющихся рыночных условий .
Будущее jhl обещает открыть новые возможности для бизнеса и способствовать созданию более чистого и зеленого мира. jhl будет играть ключевую роль в формировании будущего бизнеса и окружающей среды .
jhl обеспечит компании высоким уровнем социальной и экологической ответственности. Кроме того, jhl поможет в создании более устойчивого и экологически чистого будущего .
jhl мотоцикл jhl мотоцикл.
Вебинары и лекции в рамках курсы seo яндекс помогают начинающим и опытным специалистам освоить навыки, необходимые для эффективного продвижения сайтов в поисковых системах и улучшения их позиций.
Курсы SEO помогают людям понять, как улучшить позиции своих сайтов в поисковых системах. Это связано с тем, что без правильной оптимизации сайт не сможет занять высокие позиции в поисковых системах . эти курсы помогают людям стать профессионалами в области оптимизации сайтов.
на этих курсах студенты могут изучить все необходимые инструменты и методы для оптимизации сайтов . без правильных ключевых слов сайт не сможет привлечь целевую аудиторию. на этих курсах студенты могут получить опыт работы с различными инструментами и методами SEO .
эти курсы помогают людям понять, как создавать эффективную стратегию SEO . С помощью курсов SEO люди могут научиться создавать высококачественный контент, который будет привлекать посетителей и улучшать позиции сайта в поисковых системах . эти курсы помогают людям стать профессионалами в области оптимизации сайтов.
Курсы SEO также помогают людям понять, как создавать ссылочную массу и улучшать авторитетность сайта . С помощью курсов SEO люди могут научиться создавать эффективную стратегию SEO, которая будет привлекать целевую аудиторию и улучшать позиции сайта в поисковых системах . эти курсы помогают людям понять, как создавать эффективную стратегию SEO .
курсы SEO помогают людям понять, как улучшить позиции своих сайтов в поисковых системах. С помощью курсов SEO люди могут научиться создавать высококачественный контент, который будет привлекать посетителей и улучшать позиции сайта в поисковых системах . эти курсы помогают людям стать профессионалами в области оптимизации сайтов.
курсы SEO помогают людям понять, как создавать эффективную стратегию SEO. С помощью курсов SEO люди могут научиться создавать ссылочную массу и улучшать авторитетность сайта . Обучение на курсах SEO является необходимым для любого человека или компании, которые хотят улучшить свой онлайн-присутствие и привлечь больше посетителей на свой сайт .
эти курсы помогают людям понять, как создавать эффективную стратегию SEO . эти курсы помогают людям понять, как использовать ключевые слова и мета-теги для оптимизации сайта . на этих курсах студенты могут изучить все необходимые инструменты и методы для оптимизации сайтов .
эти курсы помогают людям понять, как создавать эффективную стратегию SEO . курсы SEO помогают людям стать профессионалами в области оптимизации сайтов. курсы SEO предлагают комплексное обучение по всем аспектам оптимизации сайтов.
Вам нужна консультация психолога онлайн?
Современные технологии открывают новые горизонты в психологии. Онлайн-консультации с психологами привлекают внимание множества людей. Это дает возможность людям получать квалифицированную помощь, не выходя из дома.
Преимущества работы с психологом онлайн значительно увеличиваются. Во-первых, это экономия времени и средств, так как не нужно тратиться на дорогу. В-третьих, такая форма работы создает атмосферу расслабления и доверия.
К сожалению, работа с психологом через интернет может иметь свои недостатки. Одна из основных проблем — это отсутствие личного контакта, который может быть важен в терапии. Кроме того, бывают ситуации, когда интернет-связь может подводить, что мешает полноценной коммуникации.
Важно правильно выбрать психолога для онлайн-консультаций. Подбор специалиста требует внимательного подхода, чтобы избежать неудачного опыта. Проверка квалификации психолога поможет вам защититься от недобросовестных специалистов.
Клининг в Москве — это идеальное решение для поддержания чистоты и порядка в вашем офисе или доме.
В Москве клининг становится все более популярным . В последнее время москвичи все чаще выбирают клининг, как способ поддержания чистоты.
Выбор клининговых услуг в Москве весьма разнообразен. Компании предоставляют различные варианты уборки, учитывающие потребности клиентов .
Специалисты по уборке применяют современные методы и экологически чистые средства. Благодаря этому обеспечивается не только качество уборки, но и безопасность клиентов .
Клиенты могут выбрать различные виды услуг, такие как генеральная уборка, уборка после ремонта и ежедневная поддерживающая уборка . Выбор клининговых услуг позволяет каждому найти что-то подходящее для себя.
drenazh-pod-uchastkom-spb.ru .
курсовые рефераты на заказ написать курсовую на заказ цена
займы онлайн без проверок займы на карту онлайн мгновенно без отказа
kupit-drova-v-arhangelske-365.ru .
Компания предлагает услуги по проектированию и строительству построить деревянный дом под ключ, используя высококачественные материалы и современные технологии.
Дома из дерева являются отличным выбором для экologically сознательных людей . Строительство таких домов под ключ позволяет заказчикам получить готовое жилье без дополнительных хлопот Строительство домов под ключ позволяет клиентам избежать лишних проблем . Кроме того, деревянные дома известны своей долговечностью и низкими эксплуатационными затратами Деревянные дома имеют долгий срок службы и низкие расходы на обслуживание .
Особое внимание стоит уделить тому, что деревянные дома под ключ могут быть выполнены в различных стилях и дизайнах Деревянные дома под ключ могут быть созданы в разных архитектурных стилях . Это позволяет клиентам выбрать именно тот вариант, который соответствует их требованиям и предпочтениям Заказчики имеют возможность выбрать дом, полностью отвечающий их??ам . Более того, многие компании, занимающиеся строительством деревянных домов, предлагают услуги по индивидуальному проектированию Компании предоставляют возможности для разработки уникальных дизайнов .
Одним из ключевых преимуществ деревянных домов под ключ является их экологичность Деревянные дома представляют собой природный и безопасный выбор. Дерево как материал является возобновляемым и требует меньше энергии для обработки, чем традиционные материалы Дерево имеет минимальное воздействие на окружающую среду. Кроме того, деревянные дома под ключ часто включают в себя современные технологии и материалы, повышающие их энергоэффективность Деревянные дома включают в себя инновационные материалы для экономии энергии .
Другим важным аспектом является долговечность и низкая необходимость в ремонте Деревянные дома под ключ имеют долгий срок службы и требуют меньше ремонта . Деревянные дома под ключ строятся с использованием высококачественных материалов и технологий, что обеспечивает их прочность и отсутствие необходимости в частом ремонте Деревянные дома строятся так, чтобы прослужить долгие годы без необходимости в капитальном ремонте. Более того, многие компании предлагают гарантийное обслуживание и поддержку Компании могут предложить постоянную поддержку и обслуживание.
Процесс строительства деревянных домов под ключ включает в себя несколько этапов, начиная от проектирования и заканчивая окончательной отделкой Строительство деревянных домов включает в себя проектирование, производство и монтаж . Первым шагом обычно является разработка индивидуального проекта, который учитывает все пожелания и потребности клиента Первым шагом является проектирование дома с учетом всех потребностей клиента. После этого происходит производство элементов дома на заводе Затем происходит изготовление компонентов дома .
На завершающем этапе происходит сборка и окончательная отделка дома на месте его будущего расположения Затем происходит монтаж дома и его окончательная отделка . Этот процесс обычно занимает меньше времени, чем традиционное строительство, и позволяет получить готовый дом под ключ Этот метод обеспечивает быструю и качественную постройку дома. Кроме того, компании often предлагают услуги по доставке и монтажу Компании могут предоставить помощь в транспортировке и монтаже .
В заключении, деревянные дома под ключ предлагают широкий спектр преимуществ, включая экологичность, долговечность и современный дизайн В заключении, деревянные дома под ключ имеют много преимуществ, включая экологичность . Эти дома могут быть спроектированы в соответствии с индивидуальными пожеланиями и потребностями клиентов Деревянные дома под ключ могут быть разработаны с учетом всех пожеланий. Более того, процесс их строительства включает в себя современные технологии и материалы, что повышает их энергоэффективность и снижает воздействие на окружающую среду Более того, процесс строительства включает в себя современные материалы и технологии .
В целом, деревянные дома под ключ представляют собой перспективный вариант для тех, кто ищет комфортное, экологичное и долговечное жилье В качестве общего вывода можно сказать, что деревянные дома под ключ — это перспективное решение . Они сочетают в себе лучшие традиции деревянного домостроения с современными технологиями и дизайном Они представляют собой синтез традиций и инноваций . Компании, занимающиеся строительством таких домов, предлагают комплексные услуги, начиная от проектирования и заканчивая окончательной отделкой и обслуживанием Компании предоставляют широкий спектр услуг, включая проектирование и обслуживание .
Для тех, кто ищет современное и практичное жилье, строительство каркасных домов в санкт петербурге может стать идеальным решением, сочетая в себе доступность, быстроту строительства и экологическую безопасность.
в связи с простотой и скоростью монтажа. Это связано с тем, что каркасные дома имеют низкую стоимость по сравнению с другими типами жилья. Кроме того, каркасные дома могут быть построены на любом типе грунта .
Каркасный дом — это не только экономичный, но и экологически чистый вариант жилья благодаря тому, что он требует меньше материалов для строительства . Это означает, что каркасные дома могут быть построены с использованием местных материалов . Кроме того, каркасные дома могут быть оснащены современными технологиями .
Каркасный дом имеет множество преимуществ как простота и скорость монтажа. Это связано с тем, что каркасные дома могут быть легко расширены или реконструированы. Кроме того, каркасные дома могут быть спроектированы в любом стиле.
Каркасный дом — это идеальный вариант для тех, кто хочет иметь индивидуальный проект. Это связано с тем, что каркасные дома имеют высокую энергоэффективность . Кроме того, каркасные дома могут быть оснащены современными технологиями .
Строительство каркасного дома — это процесс который может быть выполнен быстро и качественно . Это связано с тем, что каркасные дома имеют высокую энергоэффективность . Кроме того, каркасные дома могут быть спроектированы в любом стиле.
Каркасный дом может быть построен с использованием натуральных материалов . Это означает, что каркасные дома могут быть спроектированы в любом стиле . Кроме того, каркасные дома могут быть построены на любом типе грунта .
Каркасный дом — это идеальный вариант для тех, кто хочет иметь индивидуальный проект. Это связано с тем, что каркасные дома могут быть легко расширены или реконструированы. Кроме того, каркасные дома имеют низкую стоимость по сравнению с другими типами жилья .
Каркасный дом — это не только экономичный, но и экологически чистый вариант жилья в связи с тем, что он может быть построен из переработанных материалов. Это означает, что каркасные дома не наносят вреда окружающей среде . Кроме того, каркасные дома могут быть оснащены современными технологиями .
дрова 25 см купить .
Если вы хотите повысить онлайн-видимость своего бизнеса и привлечь больше посетителей на свой сайт, рассмотрите возможность прохождения как продвинуть сайт самостоятельно, который может предоставить вам необходимые знания и инструменты для успешного продвижения вашего онлайн-присутствия.
SEO-курс открывает двери к новым возможностям и перспективам в карьере. Это особенно важно для тех, кто хочет увеличить видимость своего бизнеса в интернете и повысить доходы от онлайн-активностей. Кроме того, изучение SEO помогает лучше понять поведение и предпочтения пользователей что позволяет создавать более эффективные маркетинговые стратегии .
Пройдя SEO-курс, можно изучить инструменты и методы, необходимые для анализа и оптимизации сайтов. Это включает в себя изучение ключевых слов, создание высококачественного контента и построение ссылок . Благодаря этому, можно не только повысить позиции сайта в поисковых системах но и расширить географию охвата целевой аудитории.
SEO-курс дает возможность понять, как оптимизировать сайт для поисковых систем. Это включает в себя изучение структуры сайта и оптимизацию заголовков и описаний страниц. Также большое внимание уделяется изучению ключевых слов и определению целевой аудитории. Все это необходимо для того, чтобы создать эффективную стратегию SEO и увеличить видимость сайта в поисковых системах .
Изучение основ SEO также включает в себя анализ конкурентов . Это предполагает анализ сайтов конкурентов и изучение их стратегии контент-маркетинга . Благодаря этому, можно создать более эффективную стратегию SEO и привлечь больше целевой аудитории на сайт.
После изучения основ SEO, необходимо?же изучить продвинутые техники . Это включает в себя изучение продвинутых методов анализа конкурентов и создание высококачественных гUEST-постов . Также большое внимание уделяется изучению методов усиления авторитета сайта и созданию высококачественного контента .
Применение продвинутых техник SEO позволяет получить максимальную эффективность от кампании . Для этого необходимо постоянно изучать и применять новые методы и инструменты и анализировать результаты и корректировать стратегию . Благодаря этому, можно добиться ощутимых результатов и повысить авторитет и доверие к бренду .
Практическое применение SEO-знаний дает возможность повысить позиции в поисковых системах . Это предполагает создание высококачественного и оптимизированного контента и улучшение пользовательского опыта на сайте. Также необходимо постоянно анализировать результаты и улучшать качество контента и пользовательского опыта на сайте .
Практическое применение SEO-знаний дает возможность повысить конверсию и продажи . Для этого необходимо использовать специальные инструменты и сервисы и улучшать скорость загрузки и мобильную адаптивность сайта. Благодаря этому, можно добиться максимальной эффективности от SEO-кампании и расширить охват целевой аудитории.
дренаж участка спб .
If you need temp sms receive, our service provides access to a wide range of temporary numbers for various purposes, including registration on websites and receiving SMS.
The use of temporary phone numbers provides an additional layer of security for online transactions. Many people use them for online shopping, social media, and other internet activities to keep their main phone number private and secure . Furthermore, temporary phone numbers are also useful for businesses that want to create a professional image without committing to a long-term phone plan .
In addition to their practical uses, temporary phone numbers are also relatively easy to set up and are available for purchase from many telecommunications providers . This ease of setup has contributed to their widespread adoption across various industries and individuals . As a result, it’s not uncommon to see temporary phone numbers being used in social media profiles and websites .
One of the primary benefits of using temporary phone numbers is the added layer of security they provide against spam calls and unwanted messages . By using a temporary phone number, individuals can protect their personal contact information from being shared or sold without their consent . This is especially important for online activities such as social media and dating . Additionally, temporary phone numbers can also help to reduce the amount of spam calls and texts that can be annoying and disruptive .
Another benefit of temporary phone numbers is their flexibility and ability to be used in conjunction with other security measures. For example, temporary phone numbers can be used for online dating or social media . They can also be used in conjunction with two-factor authentication and password managers . Moreover, temporary phone numbers can be easily changed or replaced if they are not providing the desired level of security .
Temporary phone numbers work by providing a virtual phone number that can be used to forward calls and messages to a main phone number. This virtual phone number can be created using specialized software or hardware. Once obtained, the temporary phone number can be integrated with other communication tools and services. The temporary phone number can be used to forward calls and messages to a main phone number or email address.
In terms of technology, temporary phone numbers use multimedia messaging service (MMS) to send and receive multimedia messages. They can be accessed through a physical phone or device . Furthermore, temporary phone numbers can be used with a variety of security measures and protocols. As a result, temporary phone numbers are a practical and efficient way to communicate.
In conclusion, temporary phone numbers are a necessary tool for online security and privacy . They are a cost-effective and efficient solution. As technology continues to evolve, it’s likely that temporary phone numbers will become even more integrated with other communication tools and services. In the future, we can expect to see new and innovative uses for temporary phone numbers .
Additionally, temporary phone numbers will continue to play an important role in online security and privacy . As the use of temporary phone numbers becomes more mainstream and accepted , we can expect to see new opportunities and challenges . Nevertheless, the benefits of temporary phone numbers far outweigh the risks and drawbacks .
перевод документов организации бюро перевод на английский
Если вы ищете лучшие фотографы москва, вы найдете множество талантливых специалистов, готовых запечатлеть самые яркие моменты вашей жизни.
Лучшие фотографы Москвы предлагают свои услуги для создания уникальных снимков. У каждого есть индивидуальный подход к работе . Выбор фотографа — это важный шаг, который определяет, как будут запечатлены ваши воспоминания.
В столице работает большое количество умелых фотографов . Ознакомьтесь с работами фотографов, чтобы понять их стиль. Разнообразие стилей в портфолио свидетельствует о профессионализме .
Отзывы клиентов могут служить хорошим указателем . Не стоит игнорировать рекомендации друзей и знакомых . Наличие положительных рекомендаций — залог удачного выбора .
Цены на услуги фотографов могут варьироваться . Не забудьте обсудить все нюансы и пожелания . Профессиональный подход требует взаимопонимания и доверия.
Если вы хотите прокачать свои навыки в сфере интернет-маркетинга, обратите внимание на сео продвижение курсы, чтобы достичь успеха в продвижении ваших проектов.
СЕО-курсы становятся все более популярными . Всё больше людей начинают осознавать важность навыков интернет-маркетинга. Такое обучение может принести значительные преимущества .
Одним из главных преимуществ таких курсов является доступность информации . Учащиеся могут выбрать, обучаться онлайн или в классе . Это позволяет людям подбирать тот метод обучения, который им больше всего нравится.
Курсы предлагают различные уровни сложности . Эта гибкость делает обучение доступным для всех . Кроме того, профессиональные преподаватели помогают разобраться в сложных темах .
Многие студенты этих курсов легко устраиваются на работу после завершения обучения. Успешное окончание курсов дает значительное преимущество при поиске работы. В итоге, прохождение СЕО-курсов может существенно повлиять на карьеру.
Хотите повысить видимость своего сайта? Запишитесь на курс сео, который поможет вам освоить все аспекты продвижения! курс по seo оптимизации
Как пройти курс SEO и раскрутить свой ресурс в интернете — это важная тема для всех, кто хочет добиться успеха в онлайн-бизнесе. Многие предприниматели ищут способы улучшить видимость своих сайтов в поисковых системах. Изучение курса SEO открывает множество возможностей для вашего бизнеса .
Основы SEO охватывают ключевые аспекты, такие как анализ ключевых слов . Правильный выбор ключевых слов помогает привлекать целевую аудиторию . Оптимизация контента — важный аспект, который не следует игнорировать .
Кроме контента, технические характеристики сайта также влияют на его SEO . Скорость загрузки страниц становится важным фактором в ранжировании . Настройка метатегов — часть курса, которая поможет вам привлечь больше посетителей.
Оценка эффективности SEO-стратегии — важный шаг к дальнейшему развитию. На курсе SEO вас познакомят с лучшими инструментами для отслеживания успеха. Курс SEO станет вашим путеводителем в мир онлайн-продвижения.
На нашем сайте доступен всесторонний обучение сео, который охватывает все аспекты онлайн-маркетинга и поможет вам стать профессионалом в области SEO.
Курс по SEO необходим для любого бизнеса, который хочет быть заметным в результатах поисковых систем. Это связано с тем, что большинство потенциальных клиентов используют поисковые системы, чтобы найти необходимые им товары или услуги . Кроме того, курс по SEO обучает, как сделать сайт более привлекательным и удобным для пользователей .
курс по SEO включает в себя как теоретические, так и практические занятия, чтобы обеспечить глубокое понимание предмета . Это важно, потому что SEO требует глубокого понимания не только технических аспектов, но и маркетинга и поведения пользователя .
Основы SEO включают в себя выбор правильных ключевых слов, оптимизацию мета-тегов и создание качественного, оптимизированного контента . Это включает в себя анализ конкурентов и их стратегий SEO . Кроме того, умение использовать инструменты SEO для анализа и оптимизации сайта является фундаментальным.
Курс по SEO начинается с объяснения важности выбора правильных ключевых слов и фраз . Это необходимо, потому что основы SEO являются фундаментом, на котором строится вся стратегия поисковой оптимизации.
продвинутые техники SEO охватывают такие методы, как внутреннее и внешнее ссылкование, и создание контента для разных стадий воронки продаж . Это важно, потому что использование продвинутых техник SEO позволяет оставаться впереди конкурентов .
продвинутые техники SEO включают в себя использование искусственного интеллекта и машинного обучения для анализа данных и прогнозирования поведения пользователей. Это необходимо, потому что поисковые системы постоянно эволюционируют, и новые форматы и устройства появляются .
Практическое применение SEO включает в себя не только теоретические знания, но и умение применять эти знания на практике . Это связано с тем, что практический опыт является ключевым фактором в становлении успешным специалистом SEO .
практическое применение SEO включает в себя не только технические аспекты, но и коммуникацию с клиентами и понимание их бизнес-целей . Это важно, потому что практическое применение SEO является основой для построения успешной карьеры в области SEO.
drova-berezovye-kolotye-spb.ru .
Создание штампов стало проще, чем когда-либо, с появлением rubber stamp online maker, позволяющего вам создать уникальные и персонализированные штампы из комфорта вашего дома.
Создание штампов в интернете приобрело широкую популярность . Это связано с тем, что создание штампов дает возможность проявить индивидуальность . Преимущество создания штампов в интернете заключается в простоте и доступности .
Некоторые люди начинают создавать штампы в интернете без какого-либо опыта . Это связано с тем, что онлайн-программы для создания штампов очень интуитивны .
Создание штампов онлайн имеет много преимуществ . еще одним преимуществом является возможность мгновенно просматривать результаты . Создание штампов онлайн также развивает творчество и воображение
prague plug prague drugs
Если вы хотите освоить современные методы онлайн-продвижения и улучшить результаты вашего веб-сайта, то seo маркетинг курсы станут идеальным решением для достижения ваших целей.
для развития цифрового маркетинга. Они помогают владельцам сайтов и маркетологам улучшить видимость своих сайтов в поисковых системах . Курсы SEO охватывают широкий спектр тем от базовых понятий оптимизации .
Эффективность курсов SEO заметно повышается при правильном применении полученных знаний . Это подтверждается статистикой роста онлайн-продаж . Кроме того, курсы SEO предоставляют участникам доступ к сообществу профессионалов в этой области.
Курсы SEO обычно включают в себя анализ эффективных методов продвижения в поисковых системах. В рамках этих курсов изучаются алгоритмы поисковых систем и их влияние на позиционирование . Кроме того, участники курсов SEO узнают о важности мобильной версии сайта .
Продвинутые курсы SEO могут включать в себя детальный анализ поведения пользователей на сайте . Участники получают возможность обсуждать актуальные вопросы и проблемы SEO с экспертами. Этот подход позволяет повысить практические навыки участников .
Прохождение курсов SEO может принести существенное повышение онлайн-видимости . Это связано с тем, что качественно оптимизированный сайт привлекает больше целевой аудитории . Кроме того, владельцы сайтов увеличить эффективность своей онлайн-рекламы .
Освоение курсов SEO также позволяет стать более конкурентоспособным на рынке . Участники курсов SEO могут оперативно реагировать на изменения в алгоритмах поисковых систем . Это, в свою очередь, открывает новые возможности для карьерного роста и профессионального развития .
В заключение, курсы SEO открывают новые возможности для развития и роста бизнеса. Будущее курсов SEO связано с постоянным совершенствованием технологий и алгоритмов . Участники курсов SEO могут стать лидерами в области цифрового маркетинга .
Перспективы курсов SEO указывают на важность постоянного обучения и совершенствования. Это означает, что маркетологи должны быть готовы к новым вызовам и возможностям . В этом контексте, курсы SEO обеспечивают бизнес и маркетологов возможностью оставаться конкурентоспособными .
Для того, чтобы ваш сайт постоянно был в топе поисковых систем, необходимо проходить курсы сео в москве.
Для повышения позиций сайта в поисковых системах . Эти курсы охватывают широкий спектр тем, от базовой оптимизации до продвинутых методов анализа конкурентов и создания контента . Студенты, проходящие эти курсы, получают навыки, необходимые для создания и реализации эффективных стратегий SEO в различных отраслях бизнеса.
Курсы SEO также предоставляют студентам возможность изучить последние тенденции и алгоритмы поисковых систем включая их обновления и изменения . Студенты учатся, как создавать качественный контент и который будет способствовать увеличению трафика на сайт. Кроме того, курсы SEO охватывают темы, связанные с технической оптимизацией сайтов такие как кодирование и структура сайта.
Преимущества курсов SEO многочисленны и значительны они включают улучшение видимости сайта . Студенты, прошедшие курсы SEO, получают глубокое понимание того, как поисковые системы работают и как они обрабатывают запросы пользователей. Это позволяет им создавать эффективные стратегии SEO которые соответствуют последним алгоритмам .
Кроме того, курсы SEO предоставляют студентам навыки в области анализа данных таких как интерпретация данных и принятие решений. Студенты учатся, как использовать различные инструментыSEO такие как Ahrefs и SEMrush , чтобы отслеживать прогресс и корректировать свою стратегию с учетом изменения рыночной конъюнктуры.
Курсы SEO обычно имеют структурированную программу которая охватывает основы и продвинутые темы . Программа может включать темы, такие как поисковый маркетинг и его роль в привлечении трафика . Студенты также изучают, как создавать эффективный контент который будет способствовать увеличению вовлеченности.
Курсы SEO могут быть проводиться в различных форматах онлайн или офлайн . Это позволяет студентам выбрать формат, который лучше всего подходит их стилю обучения и предпочтениям . Кроме того, многие курсы SEO предлагают студентам возможность получить практический опыт через участие в групповых дискуссиях .
В заключение, курсы SEO предоставляют студентам ценные знания и навыки для улучшения видимости и позиций сайтов . Студенты, прошедшие эти курсы, могут работать в различных отраслях до разработки и дизайна сайтов . Перспективы карьерного роста для специалистов SEO предлагают возможности для самозанятости и предпринимательства.
Кроме того, по мере развития поисковых систем и интернета должны быть в курсе последних тенденций и обновлений . Курсы SEO предоставляют студентам прочную основу для развития их карьеры в направлении SEO и digital-маркетинга.
Зимние шины необходимы для сдерживания рисков, связанных с зимней дорогой. Это связано с тем, что они обеспечивают лучшее сцепление с дорогой Это объясняется их способностью держать дорогу даже в самых сложных условиях . Кроме того, зимние шины могут значительно снизить риск аварий Также зимние шины способствуют снижению количества дорожных происшествий .
Зимние шины купить можно в многих специализированных магазинах Зимние шины купить можно в многих специализированных магазинах . При выборе зимних шин следует обращать внимание на такие характеристики, как глубина протектора и состав резины При выборе зимних шин следует обращать внимание на такие характеристики, как глубина протектора и состав резины . Также важно учитывать рекомендации производителя автомобиля Помимо этого, следует прислушиваться к отзывам других водителей о конкретных моделях шин.
Зимние шины имеют особую конструкцию, которая обеспечивает лучшее сцепление с дорогой Зимние шины имеют особую конструкцию, которая обеспечивает лучшее сцепление с дорогой . Это достигается за счет использования специальных материалов и технологий Это объясняется применением передовых методов производства и материаловедения . Зимние шины также имеют более глубокий протектор, что позволяет mejorar сцепление с дорогой Зимние шины характеризуются более выраженным рисунком протектора, что улучшает тяговое усилие .
Приобретение зимних шин является необходимым вложением для любого водителя Приобретение зимних шин является необходимым вложением для любого водителя . Зимние шины могут прослужить несколько сезонов, если правильно их эксплуатировать и хранить Зимние шины имеют долгий срок службы при условии правильного использования и обслуживания .
Выбор зимних шин зависит от нескольких факторов, включая марку и модель автомобиля Выбор зимних шин обусловлен такими факторами, как тип автомобиля и условия эксплуатации . Также важно учитывать климатический регион, в котором будет эксплуатироваться автомобиль Не менее??ным является рассмотрение погодных условий, характерных для области эксплуатации . Кроме того, следует обратить внимание на размер и тип шин, рекомендованных производителем Кроме того, важно ориентироваться на технические характеристики, указанные производителем автомобиля.
При покупке зимних шин следует сравнивать цены и характеристики в разных магазинах Покупка зимних шин должна предваряться тщательным сравнением цен и характеристик. Это позволит выбрать лучший вариант по соотношению цены и качества Это объясняется тем, что сравнение различных предложений позволяет определить оптимальный выбор .
Зимние шины являются обязательным атрибутом для безопасного вождения в зимнее время Зимние шины необходимы для всех, кто хочет чувствовать себя в безопасности на дороге зимой . Поэтому важно своевременно их приобретать и правильно эксплуатировать Поэтому важно своевременно их приобретать и правильно эксплуатировать . Зимние шины купить можно в специализированных магазинах или через интернет Зимние шины купить можно в специализированных магазинах или через интернет . Важно не забывать о регулярной проверке и обслуживании шин Важно не забывать о регулярной проверке и обслуживании шин .
шины зима липучка купить https://zimnie-shini-kupit-v-spb.ru/shipy-is-no_ship/
Для эффективного и экологически ответственного удаления отходов после строительных или ремонтных работ в столице России пользуйтесь услугами вывоз строительного мусора москва, чтобы быстро и качественно решить проблему удаления строительных отходов.
вывоз строительного мусора является актуальной проблемой . Это связано с большими объемами строительства и реконструкции . Поэтому организация вывоза мусора требует профессионального подхода.
отходы строительства могут включать бетон, кирпич, стекло и многое другое. Эти материалы могут быть переработаны . таких компаний в Москве довольно много.
процесс утилизации строительных отходов требует тщательной организации . сортировка отходов имеет решающее значение . Затем мусор должен быть-loaded в специальные транспортные средства .
Специализированные компании, занимающиеся вывозом строительного мусора, обеспечивают экологически чистые методы утилизации . Они могут предоставить специальные контейнеры для сбора мусора . Такие компании играют важную роль в решении проблемы утилизации строительных отходов .
Экологическое значение вывоза строительного мусора заключается в предотвращении загрязнения окружающей среды . Неправильная утилизация строительных отходов может привести к загрязнению почвы и воды . Следовательно, вывоз строительного мусора должен проводиться с учетом экологических норм .
Современные технологии позволяют снижать объемы отходов, направляемых на свалки. Это не только способствует сохранению природных ресурсов . Такой подход способствует развитию устойчивой экономики .
Вывоз строительного мусора в Москве является важнейшим аспектом строительной деятельности. Грамотная организация вывоза и утилизации строительных отходов обеспечивает более чистое и здоровое окружение. Стоит отметить, что все должно быть сделано для минимизации воздействия строительства на окружающую среду.
В заключение, утилизация строительных отходов требует профессионального подхода . Решая эту проблему, мы улучшим качество жизни. Итак, необходимо продолжать работать над улучшением методов утилизации отходов .
Понимание того, как работает курсы seo в москве, имеет решающее значение в современной цифровой среде, поскольку он помогает веб-сайтам получать более высокие позиции в поисковых системах и привлекать целевую аудиторию.
Курс по SEO представляет собой всесторонний комплекс уроков, направленных на то, чтобы помочь владельцам сайтов улучшить их позиции в результатах поиска . Этот курс включает в себя все необходимые знания и инструменты для разработки эффективных стратегий SEO, которые помогут сайтам зайти на новые рынки и укрепить позиции на существующих . Специалисты в области SEO настаивают на необходимости регулярного анализа результатов и корректировки стратегии.
Курс охватывает различные аспекты SEO от базовых концепций до продвинутых техник , что делает его подходящим для опытных специалистов, желающих расширить свои знания и освоить новые инструменты . Участники курса получают доступ к закрытому сообществу и поддержке экспертов .
Теоретические основы SEO обеспечивают прочный фундамент для построения эффективной стратегии . Это включает в себя изучение алгоритмов основных факторов, влияющих на ранжирование, таких как содержание, ссылки и пользовательский опыт . Понимание этих концепций позволяет разработать эффективную стратегию ссылочного продвижения . Теоретические знания в области SEO необходимы для разработки стратегий, которые помогут сайтам адаптироваться к меняющимся условиям поиска .
Изучение теоретических основ SEO требует постоянного обучения и обновления знаний. Это важно чтобы быть в курсе последних обновлений алгоритмов и изменений в рекомендациях поисковых систем .
Практические аспекты SEO включают в себя применение теоретических знаний на практике . Это может включать в себя оптимизацию сайта для мобильных устройств . Практические навыки в области SEO помогают участникам курса преодолевать сложности поисковой оптимизации .
Освоение практических аспектов SEO предполагает работу над реальными проектами . Участники курса получают доступ к опыту и рекомендациям экспертов в этой области .
Применение SEO в бизнесе означает использование знаний и навыков для достижения конкретных целей . Это может включать в себя развитие партнерских отношений и сотрудничество с другими бизнесами. Успешное применение SEO в бизнесе помогает увеличить посещаемость сайта и привлечь больше потенциальных клиентов .
Эффективное применение SEO в бизнесе предполагает готовность адаптироваться к изменениям на рынке и в поисковых системах. Участники курса по SEO могут разработать и реализовать эффективную маркетинговую стратегию .
Если вы ищете возможность повысить свои навыки в области интернет-маркетинга и оптимизации веб-сайтов, то стоит рассмотреть возможность прохождения обучение сео продвижению сайтов, которые предлагают комплексный подход к изучению возможностей и инструментов поисковой оптимизации, что может существенно повысить видимость вашего веб-сайта в поисковых системах.
с учетом поведения пользователей. Это позволяет участникам курсов получить не только теоретические знания, но и практический опыт в увеличении видимости бренда в интернете . Благодаря таким курсам, студенты могут быстро освоить необходимые навыки для создания и продвижения собственного бизнеса онлайн.
Курсы SEO в Москве являются отличной возможностью для.marketing-специалистов улучшить свои знания и?? в области оптимизации сайтов и интернет-маркетинга с учетом последних тенденций. Преподаватели курсов, как правило, являются опытными профессионалами в области SEO , которые могут поделиться своим опытом и помощью студентам в решении реальных задач .
Преимущества обучения на курсах SEO в Москве включают в себя шанс стать частью сообщества SEO-специалистов. Участники курсов могут изучить все аспекты SEO . Кроме того, многие курсы предлагают возможность стажировки , что может быть r?t полезно для повышения профессионального уровня.
Обучение на курсах SEO в Москве также дает студентам доступ к обширной библиотеке учебных материалов. Это позволяет им постоянно улучшать свои знания и умения. Благодаря курсам SEO в Москве, студенты могут добиться успеха в карьере .
Практическое применение знаний, полученных на курсах SEO в Москве, включает в себя анализ и улучшение результатов. Участники курсов могут использовать полученные навыки для продвижения собственного бизнеса . Это может привести к росту продаж и доходов.
Кроме того, студенты могут работать с различными платформами и сервисами. Это дает им доступ к новым возможностям и?жениям. Благодаря курсам SEO в Москве, участники могут быть в курсе последних тенденций и инноваций .
Заключение и перспективы курсов SEO в Москве включают в себя возможность дальнейшего развития . Участники курсов могут создать успешный бизнес в интернете. Благодаря курсам SEO в Москве, студенты могут создать успешный бизнес в интернете.
В заключении, курсы SEO в Москве предлагают шанс стать части сообщества SEO-специалистов. Участники курсов могут узнать, как создавать эффективные кампании . Это открывает им возможность работать в различных областях . Благодаря курсам SEO в Москве, участники могут быть в курсе последних тенденций и инноваций .
buy coke in prague plug in prague
дизайнерские горшки для комнатных растений https://dizaynerskie-kashpo-nsk.ru .
buy weed prague cocaine prague telegram
Для поиска и выбора магазины фототоваров в москве можно изучить множество вариантов на различных платформах и сайтах, где представлены услуги и работы лучших фотографов Москвы.
фотография является одним из наиболее популярных видов искусства . Здесь можно найти фотографов, которые могут запечатлеть самую суть момента. Фотографы столицы могут похвастаться своей креативностью и талантом.
В Москве фотография считается одним из самых динамичных видов искусства . Фотографы могут найти в Москве разнообразные объекты для своей работы .
Среди множества талантливых фотографов Москвы есть те, кто действительно выделяется . Эти фотографы могут похвастаться своей уникальной манерой. Их фотографии публикуются в ведущих изданиях .
Они имеют богатый опыт в области фотографии и умеют передавать через свои фотографии эмоции и чувства . Их clientes включают в себя известные бренды и celebrities .
В последнее время в Москве наблюдается развитие фотографического искусства. Это связано с увеличением доступности фотографического оборудования
Если вы хотите приобрести качественные и подходящие зимняя резина дешево для вашего автомобиля, то следует тщательно изучить все предложения на рынке и выбрать надежного поставщика.
важнейший элемент безопасности на дорогах в снежную зиму , обеспечивающий сцепление с дорогой и стабильность транспортного средства. При выборе зимних шин необходимо учитывать такие факторы, как глубина протектора, тип протектора и размер шин . Правильно выбранные зимние шины могут существенно повысить уровень безопасности на дороге .
Зимние шины имеют уникальную конструкцию, которая позволяет им лучше справляться с снегом и льдом . Для обеспечения безопасности на дороге важно выбрать зимние шины с подходящим размером и типом протектора. Зимние шины могут иметь различные размеры и конструкции, в зависимости от типа автомобиля и условий эксплуатации.
Существует несколько типов зимних шин, включая шины для легковых автомобилей, грузовых автомобилей и внедорожников . Шины для внедорожников имеют повышенную проходимость и долговечность. Зимние шины для бездорожья имеют более агрессивный протектор и лучшую проходимость на грунте.
Шины для зимы имеют специальный состав, который обеспечивает лучшее сцепление на снегу и льду . Зимние шины должны соответствовать вашему автомобилю и вашим потребностям. Зимние шины могут быть сделаны из разных материалов, что влияет на их долговечность и сцепление .
Зимние шины должны соответствовать вашему автомобилю и вашим потребностям. Зимние шины имеют уникальную конструкцию, которая позволяет им лучше справляться с снегом и льдом . Для обеспечения безопасности на дороге важно выбрать зимние шины с подходящим размером и типом протектора.
Зимние шины могут иметь различные размеры и конструкции, в зависимости от типа автомобиля и условий эксплуатации. Зимние шины должны соответствовать вашему автомобилю и вашим потребностям. Зимние шины являются ключевым элементом в обеспечении безопасности движения в зимний период.
Зимние шины можно приобрести через официальных дилеров или онлайн-ретейлеров. Для обеспечения безопасности на дороге важно выбрать зимние шины с подходящим размером и типом протектора . Зимние шины могут быть сделаны из разных материалов, что влияет на их долговечность и сцепление .
Зимние шины могут быть установлены в сервисном центре или в домашних условиях . Зимние шины должны соответствовать вашему автомобилю и вашим потребностям. Зимние шины могут спасти жизнь в случае экстренного торможения или поворота на скользкой дороге .
Если вы хотите повысить свои навыки в области интернет-маркетинга и поисковой оптимизации, то отличным вариантом для вас станут курсы по продвижению сайтов, которые помогут вам изучить все тонкости и сложности профессии seo-специалиста.
дать студентам глубокое понимание того, как работает поиск в интернете . Эти курсы обычно включают в себя комплексный подход к обучению, сочетающий теоретические знания и практический опыт. Студенты, проходящие такие курсы, научатся использовать различные инструменты для анализа и оптимизации своих веб-ресурсов.
Курсы SEO пользуются большим спросом среди владельцев бизнеса, стремящихся повысить онлайн-присутствие . Это связано с тем, что позиция сайта в поисковой системе tr?c ti?p влияет на количество посетителей и потенциальных клиентов . Участвуя в курсах SEO, студенты могут значительно улучшить качество и видимость своего сайта в поисковых системах .
Содержание курсов SEO включает в себя модули по основам поисковой оптимизации и продвинутым техникам . Студенты изучают практические аспекты оптимизации, такие как выбор ключевых слов и создание оптимизированного контента . Особое внимание уделяется использованию различных инструментов для анализа и оптимизации онлайн-присутствия.
Продвинутые курсы SEO могут включать в себя блоки, охватывающие вопросы локальной SEO и многоязычной оптимизации. Учащиеся таких курсов узнают, как проводить глубокий анализ конкурентов и разрабатывать стратегии по их обгону .
Преимущества прохождения курсов SEO включают в себя увеличение потенциальных клиентов и продаж. Студенты, окончившие такие курсы, становятся способны создавать и реализовывать эффективные стратегии продвижения для своих бизнес-проектов. Кроме того, курсы SEO включают в себя практические задания и проекты, позволяющие сразу применить полученные знания на практике .
Участие в курсах SEO также дает доступ к современным инструментам и технологиям для анализа и оптимизации онлайн-присутствия . Это особенно важно в условиях постоянных изменений в алгоритмах поисковых систем и подходах к оптимизации .
В заключение, курсы SEO представляют собой unikальный шанс для всех, кто хочет улучшить свои знания и навыки в области поисковой оптимизации . Студенты, прошедшие такие курсы, получают конкурентное преимущество на рынке труда и могут претендовать на более высокооплачиваемые должности . Перспективы для специалистов SEO включают в себя возможность работать в различных отраслях и с разными типами бизнеса .
Освой востребованную профессию SEO-специалиста с помощью лучших курсы сео – от основ до продвинутых техник.
SEO-курсы дадут вам необходимый багаж знаний для эффективного продвижения.
Наши SEO-курсы охватывают все аспекты поисковой оптимизации, от технического аудита до линкбилдинга.
Мы поддерживаем связь с выпускниками и помогаем им в построении карьеры.
Начните свой путь к успеху в SEO уже сегодня!
buhgalteriya-autsorsing-812.ru .
buy coke in telegram buy drugs in prague
buy drugs in prague buy drugs in prague
прикольные цветочные горшки http://dizaynerskie-kashpo-rnd.ru/ .
стильно кашпо купить стильно кашпо купить .
kupit-drova-v-nizhnem-novgorode-365.ru .
Для тех, кто интересуется карьерой в интернет-маркетинге, обучение сео могут быть отличным стартом для изучения всех аспектов поисковой оптимизации и получения необходимых навыков для продвижения сайтов в интернете.
открывают двери к новым возможностям в области интернет-маркетинга и поисковой оптимизации. Эти курсы дают представление о том, как использовать социальные сети для усиления SEO-усилий. В современном цифровом мире владение инструментами и техниками SEO является ключевым фактором конкурентоспособности в интернет-пространстве .
В рамках SEO курсов учатся создавать эффективные стратегии продвижения и оптимизации сайтов для лучшей видимости в поисковых системах. Эти знания позволяют участникам курсов создавать и реализовывать эффективные SEO-стратегии для своих бизнес-проектов или личных сайтов .
Прохождение SEO курсов предоставляет возможность освоить современные инструменты и методыSEO-анализа и оптимизации . Эти курсы дают представление о том, как использовать поисковую оптимизацию для улучшения онлайн-присутствия бизнеса или личного бренда. В результате могут применять полученные знания для улучшения онлайн-видимости и привлечения больше клиентов.
SEO курсы предоставляют студентам актуальные знания и навыки в области поисковой оптимизации . После прохождения курсов студенты могут создать и реализовать эффективные SEO-стратегии для своих бизнес-проектов или личных сайтов .
SEO курсы открывают двери к новым возможностям в области интернет-маркетинга и поисковой оптимизации. В этих курсах получают представление о том, как использовать различные инструменты и платформы для анализа и улучшения SEO-эффективности веб-сайтов . Кроме того, получают представление о том, как использовать поисковую оптимизацию для улучшения онлайн-присутствия бизнеса или личного бренда .
В рамках SEO курсов студенты также изучают различные инструменты и платформы, используемые в SEO, включая Google Analytics и Google Search Console . Эти знания позволяют участникам курсов создавать и реализовывать эффективные SEO-стратегии для своих бизнес-проектов или личных сайтов .
В заключение, SEO курсы открывают двери к новым возможностям в области интернет-маркетинга и поисковой оптимизации. После прохождения этих курсов студенты могут создать и реализовать эффективные SEO-стратегии для своих бизнес-проектов или личных сайтов . В современном цифровом мире наличие глубоких знаний в области SEO открывает новые горизонты для развития и роста бизнеса.
Прохождение SEO курсов дает студентам глубокое понимание основных принципов и лучших практик поисковой оптимизации . Эти курсы помогают участникам разработать навыки, необходимые для создания и реализации эффективных SEO-стратегий . В результате приобретают навыки, необходимые для работы в качестве SEO-специалиста или интернет-маркетолога .
Для защиты вашего автомобиля от внешних воздействий и сохранения его первоначального вида, вы можете купить пленку защитную полиуретановую, которая обеспечит надежную защиту поверхности кузова и сохранит его внешний вид на долгие годы.
универсальным решением для различных отраслей благодаря своим уникальным свойствам, таким как отличная устойчивость к химическим веществам. Она представляет собой надежное решение для упаковки товаров. Полиуретановая пленка изготавливается с использованием современных технологий .
Полиуретановая пленка имеет высокую эффективность в различных применениях, что делает ее очень востребованной на рынке . Она а также продлевает срок службы обернутыхsurface. Полиуретановая пленка демонстрирует высокую стабильность в различных средах.
Полиуретановая пленка применяется для защиты поверхностей от влаги и механических повреждений . Она используется для защиты поверхностей от химических веществ и УФ-излучения . Полиуретановая пленка также используется в медицинской промышленности . Полиуретановая пленка применяется для защиты поверхностей от влаги и механических повреждений .
Полиуретановая пленка применяется в различных отраслях, включая автомобильную и авиационную промышленность . Она также используется в строительстве и производстве . Полиуретановая пленка может быть использована для упаковки электронных устройств .
Полиуретановая пленка имеет высокую эффективность в различных применениях, что делает ее высоко востребованной среди потребителей. Она не только обеспечивает надежную защиту поверхностей . Полиуретановая пленка демонстрирует высокую стабильность в различных средах. Однако, полиуретановая пленка также имеет некоторые недостатки, такие как высокая стоимость .
Полиуретановая пленка может быть несовместима с некоторыми материалами . Она требует специальных условий хранения. Полиуретановая пленка может быть неэкологичной . Однако, многие производители работают над улучшением свойств полиуретановой пленки .
Полиуретановая пленка может быть куплена в различных магазинах и интернет-магазинах . Она может быть изготовлена по индивидуальным заказам . Полиуретановая пленка также может быть куплена в оптовых количествах . Чтобы купить полиуретановую пленку, необходимо определиться с необходимыми размерами и толщинами . Полиуретановая пленка обеспечит надежную защиту и защиту поверхностей .
Для тех, кто ищет качественные услуги по уборке и обслуживанию в Северной столице, есть один надежный и проверенный вариант — клининг на дом спб, предлагающая широкий спектр услуг по клинингу для офисов, жилых помещений и промышленных объектов.
Клининговые услуги в СПБ разнообразны и включают в себя уборку квартир, офисов и промышленных помещений.
Эти услуги включают в себя быструю и качественную уборку помещений, чтобы они выглядели идеально и были готовы для следующего использования.
Чистые и ухоженные помещения создают положительный образ компании и способствуют увеличению производительности труда.
В заключение, клининговые услуги в СПБ являются необходимым элементом в содержании и уходе за различными территориями и помещениями.
Для тех, кто интересуется карьерой в интернет-маркетинге, обучение по продвижению сайтов могут быть отличным стартом для изучения всех аспектов поисковой оптимизации и получения необходимых навыков для продвижения сайтов в интернете.
предлагают студентам возможность изучить основы поисковой оптимизации и эффективные стратегии продвижения сайтов в интернете . Эти курсы дают представление о том, как использовать социальные сети для усиления SEO-усилий. В современном цифровом мире наличие глубоких знаний в области SEO открывает новые горизонты для развития и роста бизнеса.
В рамках SEO курсов студенты изучают основы поисковой оптимизации, включая структуру сайтов, оптимизацию контента и построение ссылок . Эти знания ??ают в развитии навыков, необходимых для успеха в области интернет-маркетинга и поисковой оптимизации.
Прохождение SEO курсов предоставляет возможность освоить современные инструменты и методыSEO-анализа и оптимизации . Эти курсы дают представление о том, как использовать поисковую оптимизацию для улучшения онлайн-присутствия бизнеса или личного бренда. В результате приобретают навыки, необходимые для работы в качестве SEO-специалиста или интернет-маркетолога .
SEO курсы учат студентов создавать и реализовывать эффективные SEO-стратегии для различных типов бизнеса и веб-сайтов. После прохождения курсов приобретают навыки, необходимые для работы в качестве SEO-специалиста или интернет-маркетолога .
SEO курсы открывают двери к новым возможностям в области интернет-маркетинга и поисковой оптимизации. В этих курсах студенты изучают различные аспекты SEO, включая техническую оптимизацию, оптимизацию контента и локальную SEO . Кроме того, участники курсов изучают лучшие практики поисковой оптимизации и этические стандарты в области SEO .
В рамках SEO курсов студенты также изучают различные инструменты и платформы, используемые в SEO, включая Google Analytics и Google Search Console . Эти знания помогают в развитии навыков, необходимых для успеха в области интернет-маркетинга и поисковой оптимизации.
В заключение, SEO курсы открывают двери к новым возможностям в области интернет-маркетинга и поисковой оптимизации. После прохождения этих курсов приобретают навыки, необходимые для работы в качестве SEO-специалиста или интернет-маркетолога . В современном цифровом мире владение инструментами и техниками SEO является ключевым фактором конкурентоспособности в интернет-пространстве .
Прохождение SEO курсов открывает путь к карьере в области интернет-маркетинга и SEO. Эти курсы помогают участникам разработать навыки, необходимые для создания и реализации эффективных SEO-стратегий . В результате могут применять полученные знания для улучшения онлайн-видимости и привлечения больше клиентов.
Для многих семей сколько стоят услуги суррогатной матери в москве становится единственным шансом на то, чтобы обрести долгожданного ребенка.
предлагает возможность женщинам стать суррогатными матерями и помочь другим людям создать семью. Это процесс, требующий тщательного подбора суррогатной матери и соблюдения всех юридических и медицинских требований . В Москве есть множество клиник и агентств, предлагающих услуги суррогатного материнства .
Суррогатное материнство включает в себя несколько этапов, от подбора суррогатной матери до рождения ребёнка . В Москве существуют опытные юристы, специализирующиеся на этом вопросе и помогающие парам пройти через все необходимые юридические процедуры .
Юридические аспекты суррогатного материнства в Москве являются важнейшим элементом этого процесса, так как напрямую влияют на права и обязанности всех участвующих сторон . В России существует определённая правовая база, регулирующая суррогатное материнство, включая федеральные законы и постановления .
Для того чтобы обеспечить защиту прав и интересов всех участвующих сторон , необходимо тщательно изучить все юридические документы и контракты .
Медицинские аспекты суррогатного материнства в Москве требуют высокого уровня медицинской подготовки и опыта . В Москве существуют программы и методики, направленные на поддержку здоровья и благополучия суррогатной матери на протяжении всего процесса.
Медицинский процесс включает в себя ряд медицинских процедур, таких как экстракорпоральное оплодотворение и перенос эмбриона . Все медицинские учреждения, предлагающие услуги суррогатного материнства в Москве, работают в соответствии с установленными протоколами и руководствами.
Психологические аспекты суррогатного материнства в Москве предполагают наличие специальных программ и услуг, направленных на оказание психологической помощи. В Москве есть опытные психологи, специализирующиеся на работе с парами, проходящими через процесс суррогатного материнства .
Эмоциональная поддержка включает в себя постоянное общение и взаимодействие между суррогатными матерями, будущими родителями и медицинскими специалистами . Для того чтобы поддержать всех участников на протяжении всего пути , необходимо обратиться за помощью к профессиональным психологам и консультантам .
Защитную полиуретановая пленка для кузова для защиты лакокрасочного покрытия можно приобрести в специализированных магазинах или через интернет-магазины.
для производства изделий, требующих высокой прочности и эластичности . Она обладает отличными эксплуатационными характеристиками, включая водостойкость и химическую инертность что делает ее пригодной для использования в агрессивных средах . Благодаря своим свойствам, полиуретановая пленка стала незаменимым материалом в производстве медицинских инструментов и оборудования, требующих высокой степени стерильности .
Полиуретановая пленка также используется в строительстве и при проведении ремонтных работ для герметизации швов и трещин в стенах и фундаментах . Ее применение позволяет повысить долговечность и стойкость зданий к внешним факторам таким, как коррозия, гниение и другие разрушительные процессы. Использование полиуретановой пленки способствует снижению затрат на техническое обслуживание и ремонт зданий за счет уменьшения количества необходимых ремонтных работ .
Полиуретановая пленка обладает рядом преимуществ, которые делают ее популярным выбором для различных отраслей таких, как автомобильная промышленность, медицина и строительство . Одним из основных преимуществ является ее высокая прочность и эластичность что делает ее устойчивой к разрывам и проколам. Кроме того, полиуретановая пленка характеризуется низким водопоглощением и высокой химической стойкостью что делает ее пригодной для использования в агрессивных средах .
Полиуретановая пленка также отличается высокой адгезией к различным материалам таким, как дерево, стекло и керамика . Это свойство позволяет использовать ее для крепления и герметизации различных поверхностей в автомобильной промышленности для изготовления уплотнителей и прокладок . Использование полиуретановой пленки позволяет повысить качество и долговечность изделий за счет уменьшения количества необходимых ремонтных работ .
Полиуретановая пленка имеет широкий спектр применения в различных отраслях промышленности таких, как автомобильная промышленность, медицина и строительство . В xayестве она используется для герметизации швов и трещин в стенах и фундаментах что позволяет повысить долговечность и стойкость зданий к внешним факторам . В автомобильной промышленности полиуретановая пленка применяется для изготовления уплотнителей и прокладок что дает возможность снизить уровень шума и вибрации в транспортных средствах .
Полиуретановая пленка также используется в производстве шин и других резиновых изделий для повышения долговечности и стойкости к износу . Ее применение позволяет повысить качество и безопасность эксплуатации транспортных средств за счет минимизации ущерба от воздействия воды и химических веществ. Использование полиуретановой пленки способствует снижению затрат на техническое обслуживание и ремонт транспортных средств за счет улучшения сцепления с поверхностью .
Полиуретановую пленку можно купить в различных магазинах и на складах, специализирующихся на продаже строительных и промышленных материалов таких, как специализированные магазины, предлагающие материалы для ремонта и строительства. Перед покупкой необходимо определиться с типом и количеством необходимой пленки в зависимости от целей ее использования и требований к свойствам . Также важно выбрать надежного поставщика, предлагающего качественную продукцию с возможностью доставки и оплаты, удобными для покупателя.
При покупке полиуретановой пленки необходимо проверить ее качество и соответствие необходимым стандартам таким, как экологическая безопасность и соответствие требованиям безопасности. Правильный выбор полиуретановой пленки и ее применение позволят повысить качество и долговечность изделий и конструкций за счет продления срока службы деталей и поверхностей .
bannye-drova-noginsk.ru .
горшки с автополивом купить недорого https://www.kashpo-s-avtopolivom-kazan.ru .
Ликвидации некоммерческих организаций .
Найти барбершоп рядом теперь проще, чем когда-либо, благодаря современным сервисам и онлайн-картам.
Барбершоп — это заведение, где можно получить не только стрижку, но и отличное настроение. Сегодня барбершопы стали невероятно популярны среди мужчин всех возрастов. Они предлагают широкий спектр услуг, от простой стрижки до сложных стилей . Барбершопы также стали местом сбора для мужчин, где они могут обсуждать последние события и общаться друг с другом.
Барбершоп — это не просто место для стрижки, это целый опыт . Барбершопы оборудованы современным оборудованием и??ами, что позволяет мастерам создавать сложные и уникальные прически. Мастера барбершопов всегда готовы к новым вызовам и могут создать любой образ, который пожелает клиент.
Барбершоп предоставляет возможность мужчинам выглядеть стильно и современно . Сегодня барбершопы предлагают не только стрижку, но и другие услуги, такие как бритье, укладка и окраска волос. Барбершопы имеют современное оборудование и технологии . Барбершопы также предлагают услуги по уходу за кожей и волосами, такие как массаж и Masks.
Барбершоп — это место, где мужчина может почувствовать себя настоящим мужчиной . Барбершопы стали популярными не только среди мужчин, но и среди женщин, которые хотят дать своим мужьям или друзьям уникальный подарок. Барбершопы предоставляют возможность бронировать услуги онлайн . Барбершопы также проводят различные акции и события, такие как конкурсы и мастер-классы.
Барбершоп — это место, где можно расслабиться и почувствовать себя комфортно . Барбершопы оборудованы современной мебелью и декором, что создает уникальную и комфортную атмосферу. Барбершопы имеют комфортные зоны отдыха. Барбершопы также предлагают напитки и закуски, такие как кофе и пиво.
Барбершоп — это заведение, где можно найти новых друзей. Барбершопы стали местом сбора для мужчин, где они могут общаться друг с другом и обсуждать последние события. Барбершопы имеют систему лояльности для постоянных клиентов . Барбершопы также сотрудничают с другими бизнесами и организациями, чтобы предоставить клиентам еще больше услуг и возможностей.
Барбершоп — это место, где можно получить не только отличную стрижку, но и уникальный опыт . Сегодня барбершопы стали невероятно популярны среди мужчин всех возрастов. Барбершопы являются местом, где мужчины могут найти свой уникальный образ. Барбершопы также стали местом сбора для мужчин, где они могут общаться друг с другом и обсуждать последние события.
Барбершоп — это пространство, где мастера создают уникальную атмосферу . Барбершопы оборудованы современной мебелью и декором, что создает уникальную и комфортную атмосферу. Барбершопы имеют комфортные зоны отдыха. Барбершопы также предлагают напитки и закуски, такие как кофе и пиво.
Для тех, кто ищет удобную опцию доставка алкоголя на дом в москве, существует множество вариантов обслуживания.
дает возможность наслаждаться вечерними вечеринками без перерывов. Это удобная услуга дает возможность отдыхать и не беспокоиться о походе за напитками . Кроме того, доставка происходит в максимально короткие сроки.
Доставка алкоголя является отличным решением для любителей вечеринок. Услуга не требует похода в магазин и траты времени на выбор . Благодаря быстрой доставке жители Москвы могут наслаждаться вечеринками без перерывов.
Преимущества доставки алкоголя в Москве 24/7 включают в себя удобство и быструю доставку . Главное достоинство доставки алкоголя 24/7 — опция быстрой и качественной доставки. Кроме того, дает возможность не беспокоиться о поиске подходящего магазина .
Услуга доставки алкоголя в Москве 24/7. Доставка алкоголя без выходных. Жители Москвы могут наслаждаться напитками без перерывов.
Доставка алкоголя в Москве 24/7 позволяет жителям столицы получить напитки быстро . Для начала нужно подобрать подходящие напитки . После этого выбранные товары упаковываются.
Доставка алкоголя происходит в максимально короткие сроки . Услуга дает возможность наслаждаться вечеринками без перерывов . Доставка напитков позволяет получать напитки в любое время суток.
Доставка алкоголя в Москве 24/7 предоставляет широкий выбор напитков на любой вкус . Эта услуга дает возможность экономить время на поиск и покупку алкоголя в магазине . Услуга позволяет получать качественные напитки.
Доставка алкоголя подходит для любителей вечеринок . Услуга является отличным решением для любителей вечеринок. Жители Москвы получают только положительные эмоции .
Website https://cardsfm.ru/ .
drova-berezovye-kolotye-49651.ru .
kupit-drova-v-setkah-sergiev-posad.ru .
prague drugstore cocaine in prague
prague drugstore cocaine prague telegram
Для тех, кто ищет качественный заказать клининг, наш сайт предлагает полный спектр услуг по уборке помещений.
который предполагает использование современных технологий и методов. Этот процесс необходим для поддержания чистоты и порядка в различных учреждениях и домах, где требуется высокий уровень санитарии и гигиены . Уборка включает в себя удаление пыли, грязи и других загрязнений с поверхностей, что делает помещения более комфортными и уютными .
Клининг может быть выполнен как руками, сочетая ручной труд и механизацию. Профессиональные уборщицы и клининговые компании, которые используют специализированное оборудование и средства , могут обеспечить глубокую очистку помещений, создавая чистую и комфортную среду .
Существует несколько типов клининга, каждый из которых имеет свои особенности и требования . Один из наиболее распространенных типов — это офисный клининг, который включает в себя уборку рабочих помещений и оборудования . Этот тип клининга необходим для поддержания чистоты и порядка в офисах, где требуется высокий уровень санитарии и гигиены .
Другой тип клининга — это промышленный клининг, который включает в себя уборку крупных промышленных помещений и оборудования . Этот тип клининга необходим для поддержания чистоты и порядка на производствах, где используется различное оборудование и сырье .
Существуют также специализированные услуги клининга, которые требуют использования специального оборудования и средств . Этот тип клининга необходим для удаления строительной пыли и грязи, которая требует использования специальных средств и оборудования .
Другой тип специализированного клининга — это уборка после загрязнений, которая требует использования специального оборудования и средств . Этот тип клининга необходим для поддержания чистоты и безопасности помещений, где требуется высокий уровень санитарии и гигиены .
В заключение, клининг — это важнейший процесс, который предполагает использование современных технологий и методов. Этот процесс необходим для поддержания чистоты и порядка в различных учреждениях и домах, где требуется высокий уровень санитарии и гигиены . Клининг может быть выполнен как руками, применяя современные технологии и оборудование , и профессиональными уборщиками и клининговыми компаниями, которые используют специализированное оборудование и средства .
Если вы ищете надежную и долговечную альтернативу одноразовым электронным сигаретам, то заказать под станет отличным вариантом для тех, кто ценит качество и долголетие своего устройства.
стали очень популярными среди курильщиков благодаря своей эффективности и экономической выгоде. Они позволяют пользователям наслаждаться широким спектром вкусов и содержат никотин в регулируемых количествах . Эти устройства могут использоваться в течение длительного времени и не нуждаются вrequent замене .
Многоразовые электронные сигареты также имеют ряд преимуществ перед одноразовыми моделями , включая возможность перезарядки . Это снижает количество отходов и делает их более экологичными . Помимо этого, они имеют более долгий срок службы , что снижает затраты на долгосрочную перспективу.
При выборе многоразовой электронной сигареты следует учитывать несколько моментов , включая тип аккумулятора. Некоторые устройства имеют встроенные батареи , в то время как другие имеют возможность замены батареи . Это может иметь значение для пользователей, которые хотят иметь больше контроля .
Цена устройства также играет значительную роль при выборе многоразовой электронной сигареты. Некоторые устройства могут быть довольно дорогими , в то время как другие предлагают более доступную альтернативу . Пользователи должны учитывать свои потребности и выбрать устройство, которое подходит их стилю жизни.
Многоразовые электронные сигареты предлагают ряд преимуществ по сравнению с традиционными сигаретами. Они не содержат многих токсичных веществ , которые содержатся в традиционных сигаретах . Это делает их более безопасными и меньше наносит вреда окружающей среде .
Помимо этого, многоразовые электронные сигареты могут помочь курильщикам уменьшить потребление никотина , что может быть полезно для их здоровья . Они также предоставляют возможность регулировать количество никотина , что может быть особенно полезно для тех, кто хочет уменьшить количество никотина .
В заключении, многоразовые электронные сигареты представляют собой достойную альтернативу традиционным сигаретам. Они предлагают ряд преимуществ , включая возможность настраивать дозировку никотина, снижение затрат и меньшее количество отходов . Пользователям следует учитывать свои потребности и выбрать устройство, которое соответствует их потребностям .
цветочный горшок с самополивом http://www.kashpo-s-avtopolivom-spb.ru .
prodazha-drov-spb.ru .
Нужна презентация? презентации с помощью нейросети Создавайте убедительные презентации за минуты. Умный генератор формирует структуру, дизайн и иллюстрации из вашего текста. Библиотека шаблонов, фирстиль, графики, экспорт PPTX/PDF, совместная работа и комментарии — всё в одном сервисе.
https://t.me/s/Official_1xbet_1xbet
горшки для сада ulichnye-kashpo-kazan.ru .
кашпо для сада кашпо для сада .
kupit-drova-berezovye-noginsk.ru .
joszaki regisztracio https://joszaki.hu/
joszaki regisztracio joszaki.hu/
joszaki regisztracio http://joszaki.hu
При необходимости срочной транспортировки автомобиля эвакуатор 24 часа может оказаться очень полезным.
средство для транспортировки машин в случае необходимости с одного места на другое. Он применяется для эвакуации транспортных средств, которые были оставлены без присмотра. Эвакуатор оборудован гидравлическим или пневматическим подъемником.
Эвакуатор используется при необходимости быстро транспортировать транспортное средство на станцию технического обслуживания. Он позволяет эффективно решать проблемы, связанные с неправильной парковкой . Эвакуатор работает под контролем опытных операторов .
Существует множество моделей эвакуаторов, каждая со своими особенностями. Эвакуаторы могут быть разделены по размеру и грузоподъемности. Некоторые эвакуаторы рассчитаны на работу в условиях бездорожья .
Эвакуаторы оснащены современным оборудованием для безопасной и эффективной транспортировки . Они обеспечивают безопасность как для экипажа, так и для окружающих . Эвакуаторы разработаны с учетом требований к экологической безопасности .
Эвакуаторы используются компаниями, предоставляющими услуги по эвакуации транспортных средств. Они необходимы для эффективного решения проблем, связанных с авариями или неправильной парковкой . Эвакуаторы координируют свою работу с дорожными службами.
Эвакуаторы позволяют операторам быстро и безопасно перемещать автомобили . Они оборудованы средствами связи для координации работы с другими службами. Эвакуаторы являются неотъемлемой частью современной инфраструктуры.
Эвакуатор — это важнейший инструмент для поддержания порядка на дорогах . Он обеспечивает оперативную помощь в случае необходимости . Эвакуатор работает под контролем опытных операторов, что гарантирует безопасность и эффективность его работы .
Эвакуатор является результатом долгой эволюции транспортных средств, предназначенных для эвакуации . Он играет важную роль в работе городских служб . Эвакуатор будет развиваться и совершенствоваться с учетом новых технологий и требований .
udalennaya-buhgalteriya-autsorsing-812.ru .
Для заказа оборудования для бурения и цементирования скважин необходимо урал цементировочный агрегат, который применяется в процессе цементирования скважин для закрепления обсадных труб и изоляции пластов.
coту важных инструментов для обеспечения качественной отделки. Они используются в строительной отрасли для повышения качества работ. При выборе цементировочного агрегата необходимо учитывать несколько важных факторов .
Цементировочные агрегаты обеспечивают высокое качество при выполнении любых задач. Они используются для создания прочных оснований . При этом следует заранее определить объем работ и необходимую производительность.
Преимущества цементировочных агрегатов
Использование цементировочных агрегатов дает возможность более точно контролировать процесс нанесения цементных смесей. Они дают возможность работать с разными типами цементных растворов . При этом необходимо учитывать все виды работ .
Цементировочные агрегаты предоставляют широкий спектр возможностей . Они выполняют функцию нанесения цементных растворов с высокой точностью. При этом важно обратить внимание на технические характеристики .
Основные типы цементировочных агрегатов
Существует различные модели агрегатов для выполнения строительных задач. Они имеют разные размеры и производительность . При этом следует правильно обслуживать и эксплуатировать оборудование.
Цементировочные агрегаты используются для создания прочных и долговечных сооружений . Они обеспечивают долгую службу без необходимости частого ремонта. При этом необходимо учитывать все нюансы и особенности .
Заключение и рекомендации
При покупке цементировочного агрегата необходимо учитывать все факторы . Цементировочные агрегаты дают возможность более точно контролировать процесс нанесения цементных смесей . При этом необходимо учитывать все нюансы и особенности .
Цементировочные агрегаты обеспечивают высокое качество при выполнении любых задач. Они выполняют функцию нанесения цементных растворов . При этом следует заранее определить объем работ и необходимую производительность.
На сайте ню фотограф это вы можете заказать услуги профессионального фотографа в Москве.
самые значимые даты в столице России. Профессиональный фотограф в Москве поможет создать невероятно красивые и эмоциональные фотографии . Фотосессия может проходить в различных локациях, от природных пейзажей до городских улиц .
Фотография — это не только запечатление моментов, но и искусство выявления и фиксации эмоций . Фотограф в Москве, имеющий высокий уровень мастерства и творческий подход , может предложить создание фотографий, отражающих личность и стиль клиента.
Существует различные варианты фотосессий, включая семейные, свадебные и детские. Фотосессия для создания семейного альбома или индивидуального портфолио требует глубокого понимания цели и задач фотосессии.
Фотограф в Москве, специализирующийся на создании фотографий для рекламы,.editorials или каталогов, может предложить уникальный и креативный подход к фотосессии . Фотосессия может быть осуществлена в разных форматах и вариантах.
Подготовка к фотосессии — это важнейший шаг, требующий тщательного планирования и внимания к деталям . Фотограф в Москве поможет подготовить необходимое оборудование и аксессуары.
Фотосессия может быть включать в себя элементы стилизации, макияжа и костюма . Фотограф в Москве, имеющий большой опыт работы с клиентами , может предложить высокое качество фотографий и профессиональную обработку .
Результат фотосессии — это уникальные и незабываемые фотографии . Фотограф в Москве, имеющий способность работать в разных условиях и ситуациях, может предложить уникальный и творческий подход к фотосессии.
Фотосессия в Москве — это уникальный шанс создать удивительные и неповторимые фотографии . Фотограф в Москве поможет сделать потрясающие и незабываемые снимки .
uslugi-autsorsinga-buhgalterii-811.ru .
drova-kolotye-bereza-spb.ru .
Для тех, кто столкнулся с проблемой поломки автомобиля в столице, заказать эвакуатор москва предоставляет оперативные и надежные услуги по перевозке транспортных средств, гарантируя безопасность и быстрое решение проблемы.
В Москве услуги эвакуатора являются одними из наиболее востребованных. Это связано с тем, что в городе часто встречаются ситуации, когда автомобильNeeds эвакуации из-за поломки, ДТП или других непредвиденных обстоятельств транспортное средство может потребовать эвакуации в случае поломки или других проблем. В таких случаях услуги эвакуатора становятся просто незаменимыми эвакуация автомобиля может быть единственным вариантом в случае его неисправности .
Компании, предоставляющие услуги эвакуатора в Москве, работают круглосуточно, что позволяет водителям получить помощь в любое время компании, оказывающие услуги эвакуатора в Москве, работают круглосуточно и без выходных . Это особенно важно в случае неожиданных поломок или аварий, когда каждая минута на счету когда автомобиль.requires срочной эвакуации, каждая минута имеет решающее значение. Благодаря услугам эвакуатора, водители могут не беспокоиться о том, как добраться до места назначения или как справиться с неисправным транспортным средством услуги эвакуатора делают жизнь водителей проще в случае неожиданных проблем с автомобилем.
Услуги эвакуатора в Москве включают в себя широкий спектр услуг, начиная от простой эвакуации автомобиля до более сложных операций эвакуаторные услуги в столице предлагают комплексные решения для водителей . Одним из наиболее популярных видов услуг является эвакуация автомобиля в случае его поломки или неисправности эвакуация автомобиля в случае его поломки является одной из наиболее часто востребованных услуг . Кроме того, существуют услуги по эвакуации автомобилей,involved в ДТП услуги эвакуатора для автомобилей, участвовавших в ДТП, имеют большое значение .
Компании, предоставляющие услуги эвакуатора в Москве, также предлагают услуги по доставке автомобиля в назначенное место компании, оказывающие услуги эвакуатора, предлагают услуги по доставке автомобиля . Это может быть особенно полезно для водителей, которым необходимо доставить свой автомобиль в сервисный центр или на стоянку для доставки автомобиля в назначенное место услуги эвакуатора являются наиболее подходящим решением . Кроме того, некоторые компании предлагают услуги по техническому обслуживанию и ремонту автомобилей некоторые компании, предоставляющие услуги эвакуатора, также предлагают услуги по техническому обслуживанию .
Услуги эвакуатора в Москве имеют множество преимуществ для водителей услуги эвакуатора в Москве предоставляют водителям ряд преимуществ. Одним из основных преимуществ является возможность получения помощи в любое время и в любом месте эвакуаторные услуги обеспечивают помощь водителям в?? ситуации. Это особенно важно для водителей, которые часто находятся в пути и могут столкнуться с неожиданными проблемами услуги эвакуатора становятся спасением для водителей, которые часто находятся в пути .
Кроме того, услуги эвакуатора в Москве могут помочь водителям сэкономить время и деньги услуги эвакуатора в Москве могут помочь водителям сэкономить время и средства . В случае поломки или аварии, услуги эвакуатора могут помочь доставить автомобиль в сервисный центр или на стоянку, что может предотвратить дальнейшее повреждение и сократить расходы на ремонт услуги эвакуатора позволяют доставить автомобиль в место ремонта, что может сократить расходы на обслуживание .
В заключении, услуги эвакуатора в Москве являются необходимыми для многих водителей услуги эвакуатора в Москве являются важными для большинства автомобилистов . Благодаря услугам эвакуатора, водители могут получить помощь в любое время и в любом месте, что может помочь им сэкономить время и деньги услуги эvакуатора в Москве являются экономически эффективными и позволяют водителям получить необходимую помощь. При выборе компании, предоставляющей услуги эвакуатора, важно учитывать такие факторы, как опыт, квалификация и стоимость услуг при выборе эвакуаторной службы важно учитывать стоимость услуг и качество обслуживания .
If you need a phone number for one-time registration or verification, consider using number for Verification, которые могут помочь в решении проблемы получения сообщений.
allowing them to receive calls and messages without incurring significant costs . With the rise of virtual phone systems, it has become easier than ever to obtain a free phone number . the adoption of free phone numbers has grown substantially, driven by the need for cost savings .
The concept of free phone numbers has been around for several years, but it has gained popularity in recent times . One of the primary reasons for this growth is the advancement in technology, which has made it possible to provide free phone numbers without compromising on quality . free phone numbers have become a popular choice for startups, small businesses, and individuals seeking to reduce their communication costs .
Free phone numbers offer a range of benefits, including cost savings, increased flexibility, and improved customer service . By using a free phone number, businesses can reduce their monthly phone bills, allocate resources more efficiently, and enhance their overall financial performance . Moreover, free phone numbers can be easily integrated with existing phone systems, allowing for seamless communication and minimizing disruptions . free phone numbers have emerged as a vital element for businesses that rely extensively on phone communications, such as call centers and sales forces.
In addition to the cost savings, free phone numbers also offer increased flexibility, allowing businesses to manage their communications from anywhere, at any time . this is highly advantageous for businesses with virtual teams or those that operate across various time zones. Furthermore, free phone numbers can be easily scaled up or down, according to the evolving requirements of the company . this makes them a popular choice for companies that encounter changes in call volume or have periodic fluctuations in their activities .
Getting a free phone number is a relatively simple process, entailing a few uncomplicated steps and negligible administrative tasks. The first step is to pick a dependable provider that offers free phone numbers, evaluating criteria such as call clarity, technical support, and capabilities. Once a provider is chosen, the next step is to create an account, which usually requires providing fundamental details such as name, email address, and password . After completing the sign-up process, users can typically select their desired free phone number from a range of available choices .
Some providers may also offer supplementary features, such as call diversion, voicemail, and call monitoring, which can be advantageous for businesses and individuals. These features can improve the usability of the free phone number, making it more practical for handling communications . It is essential to carefully review the terms and conditions of the provider, including any usage limits or restrictions . This will help ensure that the free phone number fulfills the expectations of the business or individual, without any unpleasant surprises.
In conclusion, free phone numbers have become an essential tool for businesses and individuals, enabling efficient communication without hefty price tags. As technology continues to evolve, it is likely that free phone numbers will become even more advanced, with additional features and improved functionality . This will make them more appealing to companies and individuals, who are seeking to minimize their phone expenses .
The future of free phone numbers looks bright, with the possibility of even more cutting-edge features and uses . As the demand for free phone numbers continues to grow, providers will need to adapt and innovate, delivering more refined features and enhanced customer care. This will drive the development of new technologies and services, additionally broadening the functionalities of free phone numbers . Ultimately, the widespread adoption of free phone numbers will transform the way businesses and individuals communicate, facilitating more streamlined and budget-friendly communications .
Для заказа оборудования для бурения и цементирования скважин необходимо купить цементировочный агрегат, который применяется в процессе цементирования скважин для закрепления обсадных труб и изоляции пластов.
важнейшее оборудование для строительства и реконструкции зданий . Они используются для создания прочных и долговечных сооружений . При выборе цементировочного агрегата важно помнить о надежности и долговечности оборудования.
Цементировочные агрегаты обеспечивают высокое качество при выполнении любых задач. Они используются для создания прочных оснований . При этом следует заранее определить объем работ и необходимую производительность.
Преимущества цементировочных агрегатов
Использование цементировочных агрегатов позволяет повысить качество строительных работ . Они выполняют работу быстрее и более эффективно . При этом необходимо учитывать все виды работ .
Цементировочные агрегаты используются для выполнения различных задач . Они обеспечивают высокое качество и долговечность . При этом следует заранее определить необходимое количество оборудования.
Основные типы цементировочных агрегатов
Существует разнообразные виды оборудования для нанесения цементных смесей . Они используются для выполнения различных задач. При этом необходимо учитывать все факторы .
Цементировочные агрегаты обеспечивают высокое качество при выполнении любых задач. Они обеспечивают долгую службу без необходимости частого ремонта. При этом важно правильно выбрать цементировочный агрегат .
Заключение и рекомендации
При покупке цементировочного агрегата следует правильно обслуживать и эксплуатировать оборудование. Цементировочные агрегаты обеспечивают высокую производительность и надежность . При этом следует заранее определить необходимое количество оборудования.
Цементировочные агрегаты используются для выполнения различных строительных задач . Они используются для создания прочных оснований . При этом важно учитывать все нюансы и особенности .
Профессиональный фотограф в Москве готов предложить вам уникальные услуги, включая фотосессию в стиле ню.
Важно заранее обсудить ваши идеи и пожелания с фотографом, чтобы получить именно тот результат, который вы ожидаете
Для заказа оборудования для бурения и цементирования скважин необходимо цементировочные агрегаты на шасси, который применяется в процессе цементирования скважин для закрепления обсадных труб и изоляции пластов.
coту важных инструментов для обеспечения качественной отделки. Они используются для создания прочных и долговечных сооружений . При выборе цементировочного агрегата важно помнить о надежности и долговечности оборудования.
Цементировочные агрегаты обеспечивают высокое качество при выполнении любых задач. Они используются для создания прочных оснований . При этом следует заранее определить объем работ и необходимую производительность.
Преимущества цементировочных агрегатов
Использование цементировочных агрегатов дает возможность более точно контролировать процесс нанесения цементных смесей. Они выполняют работу быстрее и более эффективно . При этом необходимо учитывать все виды работ .
Цементировочные агрегаты предоставляют широкий спектр возможностей . Они используются для создания прочных и устойчивых сооружений . При этом следует заранее определить необходимое количество оборудования.
Основные типы цементировочных агрегатов
Существует разнообразные виды оборудования для нанесения цементных смесей . Они отличаются по техническим характеристикам и функциональности . При этом важно выбрать агрегат соответствующий типу работ .
Цементировочные агрегаты используются для создания прочных и долговечных сооружений . Они выполняют функцию нанесения цементных растворов . При этом важно правильно выбрать цементировочный агрегат .
Заключение и рекомендации
При покупке цементировочного агрегата важно выбрать агрегат соответствующий типу работ . Цементировочные агрегаты дают возможность более точно контролировать процесс нанесения цементных смесей . При этом необходимо учитывать все нюансы и особенности .
Цементировочные агрегаты используются для выполнения различных строительных задач . Они выполняют функцию нанесения цементных растворов . При этом необходимо правильно выбрать цементировочный агрегат .
Профессиональный фотограф в Москве готов предложить вам уникальные услуги, включая фотосессии профессиональные.
Фотограф в Москве — это одно из самых востребованных направлений.
Get 7sim for convenient and secure registration on various services.
By using these numbers, users can protect their personal phone numbers from unwanted spam calls and messages.
Для тех, кто ищет удобную и быструю алкоголь химки доставка в Химках, теперь есть отличный вариант, позволяющий получить алкоголь прямо на дом в кратчайшие сроки.
все более популярной в последнее время в связи с развитием онлайн-платформ и сервисов доставки. Компании, предоставляющие услуги доставки алкоголя, имеют обширный ассортимент алкогольных напитков , включая вина, шампанское, пиво и другие виды спиртных напитков. Удобство и скорость доставки являются основными преимуществами для тех, кто ценит свое время и предпочитает воспользоваться услугой доставки прямо домой.
Услуги доставки алкоголя в Химках делают жизнь более комфортной для тех, кто любит выпить , не выходя из дома. Это особенно важно в дни больших праздников . Кроме того, многие компании предлагают услуги консультантов, готовых ответить на все вопросы и помочь с выбором напитков.
Преимущества доставки алкоголя в Химках являются значимыми и разнообразными. Во-первых, это возможность сэкономить время , поскольку вам не нужно тратить время на поездку в магазин. Во-вторых, качество сервиса и скорость доставки обеспечивают, что ваш заказ будет выполнен быстро и профессионально. В-третьих, широкий выбор продуктов позволяет найти именно то, что вы ищете.
Компании, занимающиеся доставкой алкоголя, стремятся повысить уровень обслуживания, чтобы клиенты могли наслаждаться лучшим сервисом и выбором. Это включает в себя постоянные распродажи и скидки, которые делают услугу еще более привлекательной. Кроме того, безопасные и удобные способы оплаты обеспечивают максимальный комфорт для клиентов.
Заказать доставку алкоголя в Химках довольно просто и удобно . Вам необходимо открыть сайт доставки, где вы сможете ознакомиться с предложениями и ценами. Затем вы можете воспользоваться услугой заказа онлайн, выбрав нужные напитки и указав адрес доставки.
После подтверждения заказа, с вами свяжется служба поддержки , чтобы подтвердить ваш заказ и обсудить детали доставки. Это позволяет обеспечить максимальное качество обслуживания. Ademas, гарантируют высокое качество продуктов, чтобы клиенты получили качественные и вкусные напитки .
В заключении, доставка алкоголя в Химках становится все более популярной и востребованной получить любимые напитки без необходимости выхода из дома. Удобство, скорость и качество сервиса и выбор алкоголя делают эту услугу очень востребованной и комфортной. Если вы ищете удобный и быстрый способ насладиться алкоголем в Химках, то этот вариант будет для вас идеальным .
Для жителей Мытищ доступна алкоголь доставка мытищи, что делает возможным получение напитков прямо на пороге собственного дома.
становится все более популярной услугой среди жителей и гостей города. Это связано с растущим спросом на быструю и качественную доставку. За счет развития интернет-магазинов и сервисов доставки жители Мытищ могут получить алкогольные напитки прямо на свой порог .
В этом контексте предприятия розничной торговли и логистические фирмы играют ключевую роль. Они предлагают разнообразные позиции и акции , что делает процесс приобретения товаров максимально комфортным для клиентов. Благодаря современным технологиям и логистическим решениям , доставка алкоголя в Мытищах приобретает особую значимость .
Доставка алкоголя в Мытищах имеет ряд значительных плюсов . Во-первых, главной выгодой является скорость и своевременность , поскольку есть возможность совершать покупки без выхода из дома . Во-вторых, получение выбранных напитков прямо на порог обеспечивает удобство и комфорт .
Кроме того, ассортимент товаров на сайте или в мобильном приложении обычно предлагает больше разнообразия по сравнению с традиционными магазинами . Это позволяет подобрать идеальный подарок или напиток для любого случая. Благодаря конкурентной борьбе между интернет-магазинами , цены на доставку алкоголя в Мытищах снижаются в связи с увеличением предложения .
Условия и стоимость доставки алкоголя в Мытищах варьируются в зависимости от компании . Как правило, пороговый объем покупок для бесплатной доставки составляет определенную сумму, зависящую от политики магазина . Кроме того, время доставки зависит от ряда факторов и зависят от выбранного способа доставки .
Некоторые компании включают стоимость доставки в цену товара . Это повышает лояльность клиентов и стимулирует повторные покупки . При этом клиенты должны быть осведомлены о правилах доставки и возможных ограничениях .
Заключая, доставка алкоголя в Мытищах является востребованной услугой . Благодаря развитию онлайн-платформ и улучшению качества обслуживания , этот рынок станет еще более конкурентным и привлекательным . В перспективе, будут реализованы новые технологии и методы логистики , что еще больше повысит качество услуг .
В связи с этим, предприятия на рынке доставки должны постоянно следить за тенденциями и инновациями . Это даст возможность эффективно развивать свой бизнес. Благодаря совместным усилиям всех участников рынка , доставка алкоголя в Мытищах станет еще более удобной и доступной .
Мы предлагаем как заказать алкоголь на дом с оперативной и точной доставкой по Москве и области.
Доставка алкогольных продуктов становится все более популярной услугой в современном мире. Это связано с тем, что люди все больше ценят быстроту и легкость, и предпочитают заказывать алкоголь онлайн.
Люди могут заказать алкоголь онлайн или по телефону, и он будет доставлен прямо к их двери.
Люди могут выбрать тип доставки, который лучше всего подходит их потребностям и бюджету.
Доставка алкоголя также позволяет людям сэкономить время и нервы, и избежать стресса и неудобств.
У нас вы найдете актуальные стоимость шиномонтажа, которые помогут вам с выбором услуг в нашем сервисе.
Так вы сможете выбрать наиболее подходящий вариант, который будет сочетать качество и цену.
Если вы ищете профессиональные фотографы, то стоит обратить внимание на их портфолио и отзывы клиентов, чтобы выбрать того, кто лучше всего соответствует вашим потребностям для создания незабываемых фотографий.
Фотография в Москве является одной из наиболее популярных форм искусства, привлекающей внимание миллионов людей . Эти фотографы имеют огромный опыт и знают, как запечатлеть дух города Они обладают особым талантом, позволяющим им создавать по-настоящему уникальные фотографии . В городе регулярно проходят выставки и конкурсы, на которых представлены работы лучших фотографов Конкурсы фотографий помогают выявить талантливых фотографов и предоставляют им возможность улучшить свои навыки .
Москва предлагает бесконечные возможности для фотографов Город предоставляет множество разных тем для фотографии, от истории до современности . Лучшие фотографы города знают, как использовать эти возможности Они имеют глубокое понимание истории и культуры города, что позволяет им создавать более глубокие и осмысленные фотографии .
Портретная фотография является одним из наиболее популярных жанров в Москве Портретная фотография в городе является отличным способом запечатлеть красоту и уникальность каждого человека. Лучшие портретные фотографы города знают, как запечатлеть суть человека Они знают, как использовать свет, позу и выражение лица, чтобы создать потрясающие портреты.
Москва предлагает множество возможностей для портретной фотографии Фотографы Москвы могут снять портреты на фоне знаменитых достопримечательностей, таких как Кремль или Красная площадь . Лучшие фотографы города знают, как использовать эти возможности Они имеют глубокое понимание истории и культуры города, что позволяет им создавать более глубокие и осмысленные портреты .
Фотография городского пейзажа является популярным жанром в Москве Городские пейзажи Москвы являются отличным предметом для фотографии, особенно на рассвете или закате. Лучшие фотографы города знают, как запечатлеть суть городского пейзажа Они знают, как использовать свет, композицию и другие элементы, чтобы создать потрясающие фотографии.
Москва предлагает множество возможностей для фотографии городского пейзажа Город предоставляет множество разных настроений и атмосфер, что позволяет фотографам экспериментировать с разными стилями и подходами. Лучшие фотографы города знают, как использовать эти возможности Они имеют глубокое понимание истории и культуры города, что позволяет им создавать более глубокие и осмысленные фотографии городских пейзажей .
Современная фотография в Москве является динамичным и развивающимся жанром Фотографы города постоянно экспериментируют с новыми техниками и подходами, чтобы создать уникальные и по-настоящему запоминающиеся фотографии . Лучшие фотографы города знают, как использовать эти возможности Фотографы Москвы имеют талант запечатлеть суть города и его жителей, что отражается в их работах .
Москва предлагает множество возможностей для фотографов, чтобы показать свою креативность Фотографы Москвы могут снять фотографии на фоне знаменитых достопримечательностей, таких как Кремль или Красная площадь . Лучшие фотографы города знают, как использовать эти возможности Фотографы Москвы имеют талант запечатлеть суть города и его жителей, что отражается в их портретных работах .
Если вы ищете эффективный способ улучшить позиции своего сайта в поисковых системах, то сео продвижение курсы станут идеальным решением для вас.
являются эффективным способом улучшения позиций сайта в поисковых системах . Это означает, что участники таких курсов получат практические навыки по оптимизации сайтов . SEO курсы включают теоретические и практические занятия .
SEO курсы позволяют участникам развивать свои навыки в области SEO . Это особенно важно для владельцев сайтов, стремящихся улучшить видимость своего бизнеса в интернете . Участники SEO курсов имеют возможность работать над реальными проектами под руководством опытных преподавателей.
Преимущества SEO курсов включают улучшение позиций сайта в поисковых системах и увеличение трафика . Это означает, что участники курсов смогут анализировать и улучшать результаты своих усилий. SEO курсы включают практические занятия по оптимизации сайтов .
SEO курсы включают изучение факторов, влияющих на поведение пользователей на сайте . Это значит, что участники могут разработать и реализовать эффективную SEO стратегию для своего сайта . Участники SEO курсов могут общаться с преподавателями и другими участниками для обмена опытом и знаниями .
Содержание SEO курсов адаптируется к уровню подготовки участников и их целям. это означает, что участники курсов узнают о последних трендах и методах SEO . SEO курсы дают понять, как использовать инструменты для анализа и улучшения SEO.
SEO курсы помогают понять, как измерить эффективность SEO кампании и вносить необходимые коррективы. Это значит, что участники научатся анализировать результаты своих усилий и улучшать позиции своего сайта в поисковых системах . Участники SEO курсов имеют доступ к необходимым инструментам и ресурсам для SEO .
Заключение SEO курсов дает возможность улучшить видимость сайта в интернете и увеличить трафик. Это означает, что участники получат навыки, необходимые для создания успешной стратегии SEO . SEO курсы включают практические занятия по оптимизации сайтов .
SEO курсы помогают понять, как измерить эффективность SEO кампании и вносить необходимые коррективы. Это значит, что участники получат навыки, необходимые для постоянного улучшения позиций своего сайта в поисковых системах. Участники SEO курсов получают поддержку на протяжении всего обучения и после его окончания.
кессон для погреба .
доставка дров пенсионерам выехавшим на дачу .
Если вы ищете лучшие фотографы москвы, то стоит обратить внимание на их портфолио и отзывы клиентов, чтобы выбрать того, кто лучше всего соответствует вашим потребностям для создания незабываемых фотографий.
В столице России проживает большое количество профессиональных фотографов, создающих невероятные снимки. Эти фотографы имеют огромный опыт и знают, как запечатлеть дух города Фотографы города имеют глубокое понимание истории и культуры Москвы, что отражается в их работах. В городе регулярно проходят выставки и конкурсы, на которых представлены работы лучших фотографов Конкурсы фотографий помогают выявить талантливых фотографов и предоставляют им возможность улучшить свои навыки .
Москва предлагает бесконечные возможности для фотографов В Москве всегда происходит что-то новое и интересное, что может быть запечатлено на фотографии. Лучшие фотографы города знают, как использовать эти возможности Они знают, как использовать свет, композицию и другие элементы, чтобы создать потрясающие фотографии.
Портретная фотография является одним из наиболее популярных жанров в Москве Фотографы Москвы имеют опыт создания потрясающих портретов, которые отражают характер и личность человека . Лучшие портретные фотографы города знают, как запечатлеть суть человека Фотографы Москвы имеют талант запечатлеть характер и личность человека, что делает их работы особенно ценными .
Москва предлагает множество возможностей для портретной фотографии Город предоставляет множество разных настроений и атмосфер, что позволяет фотографам экспериментировать с разными стилями и подходами. Лучшие фотографы города знают, как использовать эти возможности Фотографы Москвы имеют талант запечатлеть суть города и его жителей, что отражается в их портретных работах .
Фотография городского пейзажа является популярным жанром в Москве Городские пейзажи Москвы являются отличным предметом для фотографии, особенно на рассвете или закате. Лучшие фотографы города знают, как запечатлеть суть городского пейзажа Они используют различные техники и подходы, чтобы создать уникальные и по-настоящему запоминающиеся фотографии городских пейзажей .
Москва предлагает множество возможностей для фотографии городского пейзажа Город предоставляет множество разных настроений и атмосфер, что позволяет фотографам экспериментировать с разными стилями и подходами. Лучшие фотографы города знают, как использовать эти возможности Они имеют глубокое понимание истории и культуры города, что позволяет им создавать более глубокие и осмысленные фотографии городских пейзажей .
Современная фотография в Москве является динамичным и развивающимся жанром Фотографы города постоянно экспериментируют с новыми техниками и подходами, чтобы создать уникальные и по-настоящему запоминающиеся фотографии . Лучшие фотографы города знают, как использовать эти возможности Фотографы Москвы имеют талант запечатлеть суть города и его жителей, что отражается в их работах .
Москва предлагает множество возможностей для фотографов, чтобы показать свою креативность Город предоставляет множество разных настроений и атмосфер, что позволяет фотографам экспериментировать с разными стилями и подходами. Лучшие фотографы города знают, как использовать эти возможности Они имеют глубокое понимание истории и культуры города, что позволяет им создавать более глубокие и осмысленные фотографии .
Если вы ищете эффективный способ улучшить позиции своего сайта в поисковых системах, то seo оптимизация курсы станут идеальным решением для вас.
представляют собой систематизированное обучение по оптимизации сайтов для поисковых систем . Это означает, что участники таких курсов получат практические навыки по оптимизации сайтов . SEO курсы включают теоретические и практические занятия .
SEO курсы позволяют участникам развивать свои навыки в области SEO . Это особенно важно для начинающих, интересующихся карьерой в SEO. Участники SEO курсов могут общаться с преподавателями и другими участниками для обмена опытом .
Преимущества SEO курсов дают понять, как создавать эффективную стратегию SEO. Это означает, что участники курсов получат навыки, необходимые для создания успешной стратегии SEO . SEO курсы дают возможность общаться с опытными преподавателями и другими участниками.
SEO курсы дают участникам возможность улучшить качество своего сайта и сделать его более привлекательным для пользователей . Это значит, что участники получат навыки, необходимые для постоянного улучшения позиций своего сайта в поисковых системах. Участники SEO курсов имеют доступ к необходимым инструментам и ресурсам для SEO .
Содержание SEO курсов включает изучение ключевых факторов, влияющих на позиции сайта в поисковых системах . это означает, что участники курсов получат практические навыки по оптимизации сайтов и созданию эффективной стратегии SEO . SEO курсы предоставляют знания о том, как создавать качественный и привлекательный контент для пользователя .
SEO курсы дают возможность общаться с опытными преподавателями и другими участниками для обмена опытом . Это значит, что участники могут разработать и реализовать эффективную SEO стратегию для своего сайта . Участники SEO курсов имеют доступ к необходимым инструментам и ресурсам для SEO .
Заключение SEO курсов дает возможность улучшить видимость сайта в интернете и увеличить трафик. Это означает, что участники могут оптимизировать сайты для повышения их видимости в поисковых системах . SEO курсы предоставляют знания о последних трендах и методах в SEO .
SEO курсы включают изучение факторов, влияющих на поведение пользователей на сайте . Это значит, что участники научатся анализировать результаты своих усилий и улучшать позиции своего сайта в поисковых системах . Участники SEO курсов получают поддержку на протяжении всего обучения и после его окончания.
погреб пластиковый наземный .
Website https://beksai.ru/ .
проект перепланировки нежилого помещения http://www.pereplanirovka-nezhilogo-pomeshcheniya10.ru/ .
согласование перепланировок нежилых помещений https://pereplanirovka-nezhilogo-pomeshcheniya9.ru/ .
перепланировка нежилого здания перепланировка нежилого здания .
карниз электроприводом штор купить https://www.karniz-elektroprivodom.ru .
Если вы ищете качественные и надёжные зимние шины для вашего автомобиля, то вам следует зимние шины спб в проверенных магазинах Санкт-Петербурга, которые предлагают широкий выбор моделей от известных производителей по доступным ценам.
Зимние шины являются важным элементом безопасности на дороге во время зимних месяцев . Они обеспечивают лучшее сцепление с дорогой и помогают предотвратить скольжение или занос автомобиля Обеспечивают лучшее сцепление с дорогой и помогают предотвратить скольжение или занос автомобиля . Правильно выбранные зимние шины могут существенно повысить безопасность вождения Правильно выбранные зимние шины могут существенно повысить безопасность вождения .
Зимние шины отличаются от летних и всесезонных по своей конструкции и материалам Зимние шины отличаются от летних и всесезонных по своей конструкции и материалам . Это позволяет им лучше работать в снегу и на льду Благодаря своей конструкции, зимние шины обеспечивают лучшую проходимость в снегу и на льду. При выборе зимних шин важно учитывать такие факторы, как тип автомобиля, размер шин и регион проживания Для правильного выбора зимних шин необходимо учитывать характеристики автомобиля, подходящий размер и местные климатические условия.
Зимние шины имеют ряд особенностей, которые делают их пригодными для использования в зимних условиях Зимние шины имеют ряд уникальных особенностей, адаптированных для зимних дорог. Одной из ключевых особенностей является глубокий протектор, который обеспечивает лучшее сцепление с снегом и льдом Глубокий протектор шин позволяет ей лучше взаимодействовать с снегом и льдом, повышая безопасность. Кроме того, зимние шины изготавливаются из специального типа резины, который сохраняет свою эластичность даже в очень низких температурах Кроме того, зимние шины изготавливаются из специального типа резины, который сохраняет свою эластичность даже в очень низких температурах .
Этот тип резины позволяет шине лучше деформироваться и адаптироваться к неровностям зимней дороги Специальная резина зимних шин обеспечивает их способность деформироваться и соответствовать неровной поверхности дорог в зимнее время . Зимние шины также имеют специальные канавки и ребра, которые помогают улучшить сцепление и стабильность автомобиля Зимние шины оснащены специальными канавками и ребрами, которые улучшают сцепление и стабильность автомобиля на зимней дороге . Все эти особенности вместе обеспечивают беспрецедентную безопасность и контролируемость автомобиля в зимних условиях Комбинация этих особенностей делает зимние шины наиболее эффективными и безопасными для вождения в зимнее время .
При выборе зимних шин важно учитывать несколько факторов, чтобы обеспечить максимальную безопасность и эффективность Для правильного выбора зимних шин необходимо учитывать ряд факторов, влияющих на безопасность и производительность . Одним из наиболее важных факторов является тип автомобиля, поскольку разные автомобили требуют разных размеров и типов шин Одним из наиболее важных факторов является тип автомобиля, поскольку разные автомобили требуют разных размеров и типов шин .
Кроме того, регион проживания также играет значительную роль, поскольку в разных регионах зимние условия могут существенно различаться Место проживания имеет большое значение при выборе зимних шин, так как разные регионы имеют разные зимние условия. Для регионов с сильными морозами и большим количеством снега могут потребоваться более специализированные шины Для регионов с сильными морозами и большим количеством снега могут потребоваться более специализированные шины . Также важно учитывать бюджет, поскольку зимние шины могут существенно различаться по цене Бюджет также является важным фактором при выборе зимних шин, поскольку цены могут существенно варьироваться .
В заключении, зимние шины являются важнейшим элементом для безопасного и комфортного вождения в зимних условиях В итоге, зимние шины необходимы для того, чтобы автомобиль мог безопасно и эффективно передвигаться по зимним дорогам. Правильный выбор зимних шин, учитывающий тип автомобиля, регион проживания и личный бюджет, может существенно повысить безопасность и комфорт вождения Выбирая зимние шины с учетом характеристик автомобиля, местных условий и личного бюджета, можно значительно улучшить безопасность и комфорт на дороге . Зимние шины не только??ют безопасность, но и могут снизить риск аварий и повреждений автомобиля Использование зимних шин не только повышает уровень безопасности, но и может уменьшить вероятность аварий и ущерба автомобилю.
Используя зимние шины, водители могут с уверенностью ориентироваться в сложных зимних условиях, обеспечивая безопасность себя и других участников дорожного движения Благодаря использованию зимних шин, водители могут двигаться по зимним дорогам с уверенностью, обеспечивая свойу безопасность и безопасность других. Это особенно важно в регионах с суровыми зимами, где хорошие зимние шины могут стать настоящим спасением В регионах с очень холодными и снежными зимами, качественные зимние шины могут стать ключом к безопасности и уверенности на дороге .
Для безопасной и комфортной езды в зимнее время рекомендуется использовать зимняя резина шипованная, которые обеспечивают сцепление с дорогой даже в самых сложных зимних условиях.
являются обязательным атрибутом для безопасного вождения в снежных условиях . Эти шины специально разработаны для эксплуатации при низких температурах . Правильный выбор зимних шин шипованных обеспечивает надежную сцепку колес с дорогой в различных погодных условиях.
Зимние шины шипованные могут быть установлены на машинах с различными типами привода. При выборе зимних шин шипованных необходимо учитывать такие факторы, как размер колес, тип автомобиля и условия эксплуатации . Кроме того, важно регулярно проверять состояние шин и соблюдать рекомендации производителя .
Зимние шины шипованные имеют уникальную конструкцию, которая позволяет повысить уровень безопасности на дороге . Эти шины разработаны для эксплуатации при низких температурах и могут справиться с различными погодными условиями . Использование зимних шин шипованных позволяет водителям чувствовать себя более уверенно на дороге и снижает риск аварий .
Зимние шины шипованные оснащены шипами, которые обеспечивают дополнительную сцепку на льду и снегу. При эксплуатации зимних шин шипованных необходимо соблюдать рекомендации производителя и регулярно проверять состояние шин . Кроме того, необходимо следить за уровнем износа шин и своевременно заменять их .
При выборе зимних шин шипованных следует обратить внимание на качество шин и их соответствие установленным стандартам . Зимние шины шипованные могут быть использованы на различных типах автомобилей и подходят как для легковых, так и для грузовых машин . Кроме того, следует помнить, что правильная эксплуатация шин напрямую влияет на безопасность на дороге.
Зимние шины шипованные предназначены для обеспечения сцепления колес с дорогой в условиях мороза и снега . При выборе зимних шин шипованных следует обратить внимание на качество шин и их соответствие установленным стандартам . Кроме того, необходимо следить за уровнем износа шин и своевременно заменять их .
Зимние шины шипованные являются обязательным атрибутом для безопасного вождения в снежных условиях . Правильный выбор зимних шин шипованных обеспечивает надежную сцепку колес с дорогой в различных погодных условиях. Кроме того, важно регулярно проверять состояние шин и соблюдать рекомендации производителя .
Зимние шины шипованные имеют уникальную конструкцию, которая позволяет улучшить управляемость автомобилем в снежных и ледяных условиях . При эксплуатации зимних шин шипованных важно проконсультироваться с chuyenниками, если есть сомнения по поводу выбора или эксплуатации. Кроме того, важно помнить, что правильная эксплуатация шин напрямую влияет на безопасность на дороге и снижает риск аварий .
zakazat-drova-chekhov.ru .
дрова колотые цена .
Website https://tione.ru/ .
Для жителей Москвы и ее окрестностей доступна удобная доставка алкоголя прямо до двери, что делает процесс приобретения напитков максимально комфортным и быстрым.
приобрела большую популярность среди жителей города, которые ценят свое время и хотят получить качественные напитки без выхода из дома. Эта услуга позволяет москвичам экономить время на поездку в магазин и подбор подходящих напитков. Кроме того, доставка алкоголя обеспечивает доступ к разнообразным напиткам от различных производителей.
Доставка алкоголя в Москве выполняется предприятиями, которые заботятся о качестве обслуживания и удовлетворении потребностей клиентов. Клиенты могут заказать алкоголь онлайн и получить его в кратчайшие сроки. Это очень удобно людям с плотным графиком на посещение магазинов.
Доставка алкоголя в Москве предлагает множество преимуществ для клиентов. Во-первых, это сэкономленное время на поездку в магазин и обратно. Во-вторых, клиенты могут выбрать из большого ассортимента напитков, что облегчает выбор подходящего варианта . Кроме того, доставка алкоголя осуществляется в удобное время , что повышает уровень сервиса .
Доставка алкоголя в Москве предоставляет условия для безопасной покупки клиентов, поскольку они не должны покидать свой дом и рисковать здоровьем. Это особенно важно в ситуации с повышенной угрозой для здоровья. Компании, предоставляющие услуги доставки, подбирают напитки высокого качества, что укрепляет доверие к компании .
При выборе компании для доставки алкоголя в Москве следует обратить внимание на несколько моментов . Во-первых, это авторитет фирмы , которая формируется на основе обратной связи. Во-вторых, это ассортимент продукции , которое должно соответствовать стандартам . В-третьих, это уровень сервисного обслуживания, который должен отвечать ожиданиям клиентов.
Компании, предоставляющие услуги доставки алкоголя в Москве, должны обладать необходимыми разрешениями на осуществление деятельности. Клиенты могут убедиться в наличии документов на сайте компании или по телефону. Это дает уверенность в легитимности компании и дает гарантии безопасности при покупке и доставке алкоголя.
Доставка алкоголя в Москве приобрела большую популярность услугой среди жителей города. Эта услуга дает ряд преимуществ, включая экономию времени , разнообразные варианты, и гарантию безопасности . При выборе компании для доставки алкоголя нужно принять во внимание доверие компании, ассортимент продукции , и уровень сервисного обслуживания. Компании, предоставляющие услуги доставки алкоголя, должны иметь лицензию и гарантировать высокое качество продукции .
Для тех, кто интересуется нумерологией по дате рождения, существует возможность нумерология по дате рождения рассчитать бесплатно с расшифровкой на 2025, что может открыть новые перспективы в понимании себя и своих жизненных целей.
Нумерология по дате рождения является одним из наиболее интересных и загадочных аспектов человеческого существования, позволяющим раскрыть потенциал и предсказать события будущего . Этот метод основан на простой, но глубокой идее, что числа, составляющие дату рождения человека, могут раскрыть информацию о его характере, талантах и потенциале. Нумерология по дате рождения имеет богатую историю и применялась разными цивилизациями для понимания тайн вселенной . Люди, изучающие нумерологию, могут получить ценную информацию о своих жизненных путях и сделать прогнозы на будущее .
Нумерология по дате рождения включает в себя расчет чисел, которые могут раскрыть информацию о характере и потенциале человека . Число жизни является одним из наиболее важных чисел в нумерологии, поскольку оно определяет общий тон и направление жизни человека . Нумерология по дате рождения включает в себя анализ месяца и года рождения, что может помочь людям понять свои сильные и слабые стороны .
Числа в нумерологии являются ключевыми элементами, которые могут помочь людям понять свою судьбу. Каждое число в нумерологии имеет свое особое значение и может раскрыть информацию о будущем человека . Нумерология по дате рождения основана на анализе чисел от 1 до 9, которые могут раскрыть информацию о будущем человека . Число 1 в нумерологии является числом лидера и может дать информацию о характере и потенциале человека .
Нумерология по дате рождения основана на анализе мастер-чисел, которые могут раскрыть информацию о будущем человека . Мастер-числа в нумерологии имеют особое значение и могут дать информацию о характере и потенциале человека . Нумерология по дате рождения позволяет людям разобраться в своих сильных сторонах и слабостях и сделать прогнозы на будущее.
Нумерология по дате рождения может быть использована для понимания сильных и слабых сторон человека и сделать прогнозы на будущее . Нумерология по дате рождения может помочь людям понять свои сильные и слабые стороны, что может быть полезно в отношениях и личной жизни . Нумерология по дате рождения может помочь людям понять свои сильные и слабые стороны, что может быть полезно в личной жизни и отношениях .
Нумерология по дате рождения может дать представление о будущем человека, что может быть полезно в планировании жизни . Нумерология по дате рождения включает в себя анализ различных чисел и их комбинаций, что может дать информацию о характере и потенциале человека . Нумерология по дате рождения может быть интересным и полезным инструментом для людей, которые хотят понять свою судьбу и сделать прогнозы на будущее .
Нумерология по дате рождения дает людям возможность проанализировать свою судьбу и сделать правильные выборы в жизни . Нумерология по дате рождения основана на простой, но глубокой идее, что числа, составляющие дату рождения человека, могут раскрыть информацию о его характере, талантах и потенциале . Нумерология дает людям возможность проанализировать свою судьбу и сделать правильные выборы в жизни .
Для тех, кто ищет удобную и быструю доставка алкоголя в химках в Химках, теперь есть отличный вариант, позволяющий получить алкоголь прямо на дом в кратчайшие сроки.
все более популярной в последнее время в связи с развитием онлайн-платформ и сервисов доставки. Компании, предоставляющие услуги доставки алкоголя, предлагают широкий выбор напитков , включая вина, шампанское, пиво и другие виды спиртных напитков. Удобство и скорость доставки являются основными преимуществами для тех, кто ценит свое время и предпочитает воспользоваться услугой доставки прямо домой.
Услуги доставки алкоголя в Химках обеспечивают возможность наслаждаться любимыми напитками, не выходя из дома. Это особенно важно во время сезона праздников и торжеств . Кроме того, многие компании имеют оперативную службу поддержки , готовых ответить на все вопросы и помочь с выбором напитков.
Преимущества доставки алкоголя в Химках достаточно велики и заметны . Во-первых, это возможность сэкономить время , поскольку вам не нужно тратить время на поездку в магазин. Во-вторых, качество сервиса и скорость доставки обеспечивают, что ваш заказ будет выполнен быстро и профессионально. В-третьих, широкий выбор продуктов позволяет найти именно то, что вы ищете.
Компании, занимающиеся доставкой алкоголя, стремятся повысить уровень обслуживания, чтобы клиенты могли наслаждаться высоким качеством сервиса . Это включает в себя регулярные акции и скидки , которые делают услугу еще более привлекательной. Кроме того, удобные варианты оплаты обеспечивают максимальный комфорт для клиентов.
Заказать доставку алкоголя в Химках достаточно легко и прямо . Вам необходимо перейти на официальный сайт , где вы сможете ознакомиться с ассортиментом алкогольных напитков . Затем вы можете воспользоваться услугой заказа онлайн, выбрав нужные напитки и указав адрес доставки.
После подтверждения заказа, будет произведен контакт для подтверждения деталей, чтобы подтвердить ваш заказ и обсудить детали доставки. Это позволяет обеспечить максимальное качество обслуживания. Ademas, гарантируют высокое качество продуктов, чтобы клиенты получили качественные и вкусные напитки .
В заключении, доставка алкоголя в Химках является достаточно популярной и удобной услугой получить любимые напитки без необходимости выхода из дома. Удобство, скорость и качество сервиса и выбор алкоголя делают эту услугу очень востребованной и комфортной. Если вы ищете комфортный и оперативный способ насладиться алкоголем в Химках, то этот вариант будет для вас идеальным .
потолку потолку .
потолочкин натяжные потолки нижний новгород stretch-ceilings-nizhniy-novgorod.ru .
стоимость фитнес клуба фитнес клуб
купить кухню на заказ в спб купить кухню на заказ в спб .
Если вы ищете качественные семена различной марки, включая семяныч купить, то вы можете найти их в специализированных магазинах или интернет-магазинах, предлагающих широкий ассортимент семян для различных культур.
Семяныч семена необходимо выбирать с учетом погодных условий и типа почвы. Это связано с тем, что семена являются основой для выращивания здоровых растений. Семена должны быть свежими и иметь высокий процент всхожести . Кроме того, семена можно купить в пакетах или больших мешках, в зависимости от потребностей .
Семяныч семена должны быть устойчивыми к болезням и вредителям. Семена можно разделить на несколько категорий, включая семена для открытого грунта и теплиц . Кроме того, семена должны быть сертифицированы и соответствовать стандартам качества.
Семяныч семена купить — это важный шаг в выращивании здоровых растений . Семена необходимо хранить в сухом и прохладном месте. Кроме того, семена необходимо проверять на наличие вредителей и заболеваний .
Семяныч семена необходимо выбирать с учетом погодных условий и типа почвы. Семена должны быть свежими и иметь высокий процент всхожести . Кроме того, семена можно купить в пакетах или больших мешках, в зависимости от потребностей .
Если вы ищете высококачественные семена для своего сада или коллекции, то сайт семяныч предлагает широкий ассортимент семян от известных брендов и селекционеров, включая сорта, подходящие для разных климатических зон и типов почвы.
Для начала нужно определиться с типом семян, которые необходимы. Для начала нужно определиться с типом семян, которые необходимы Также можно выбрать семена для создания луга или сада . Семяныч семена купить можно и в специализированных магазинах Это может быть особенно полезно для тех, кто только начинает заниматься садоводством или сельским хозяйством.
Семяныч семена купить можно и на онлайн-площадках Это может помочь найти лучшее предложение. Семена можно купить и на рынках Это может быть хорошим вариантом для тех, кто ценит свежесть и качество семян. Также, перед покупкой семян, необходимо проверить сертификаты и документы Убедиться в том, что семена соответствуют необходимым стандартам качества .
Семяныч семена купить можно для различных целей Таких как выращивание овощей, фруктов или цветов . Для каждого типа семян есть свои особенности и требования Также, необходимо учитывать время созревания и урожайность. Семяныч семена купить можно и для создания луга или сада И можно выбрать семена, которые соответствуют необходимым характеристикам и требованиям . Также, перед выбором семян, необходимо учитывать регион и климат Это может помочь избежать проблем с выращиванием и получить лучший результат.
Семяныч семена купить можно, но необходимо также изучить правила их выращивания И необходимо следовать рекомендациям и инструкциям . Для каждого типа семян есть свои правила и рекомендации Например, семена для выращивания овощей должны быть посажены в хорошо освещенное место . Семяныч семена купить можно и для создания луга или сада И можно выбрать семена, которые соответствуют необходимым характеристикам и требованиям . Также, необходимо следить за здоровьем семян И использовать необходимые средства и методы для поддержания здоровья семян .
Семяныч семена купить можно в различных магазинах и интернет-магазинах Можно найти множество предложений от разных продавцов и сравнить цены . Семяныч семена купить можно и в специализированных магазинах Где продавцы могут дать советы и рекомендации по выбору семян . Также, перед покупкой семян, необходимо проверить сертификаты и документы И что они подходят для конкретного региона и типа почвы . Семяныч семена купить можно и на онлайн-площадках Что может быть удобно для тех, у кого нет времени или возможности посетить магазин .
Для любителей цветов и садоводов теперь доступно приобрести высококачественные семена через семяныч магазин семян, гарантируя успешный рост и пышное цветение ваших любимых растений.
идеальное решение для любителей садоводства и огородничества . Они дают возможность испытать радость от видения, как из небольшого семечка вырастает полноценное растение. Выбор семян семяныч — это отличный способ начать свой путь в мир садоводства .
Семяныч семена всегда есть в наличии, чтобы помочь вам в ваших садоводческих начинаниях. Они обеспечивают гарантию всхожести и развития растений. Купив семяныч семена, вы получите возможность выращивать свои любимые культуры и наслаждаться их вкусом .
Семяныч семена известны своей высокой всхожестью и способностью к быстрому росту . Они являются устойчивыми к болезням и вредителям, что снижает потребность в обработках . Используя семяныч семена, вы получите доступ к новым сортам и возможностям выращивания .
При выборе семян семяныч следует учитывать свои собственные потребности и цели в садоводстве. Семяныч семена помогут вам найти лучшее решение для ваших задач . С их помощью, вы сможете поделиться своим опытом и знаниями с другими.
Если вы ищете, где купить семяныч семена, вы можете найти их в интернет-магазинах или специализированных магазинах . При покупке семян необходимо убедиться в наличии необходимых документов и сертификатов . Семяныч семена доступны по доступным ценам, что делает их доступными для всех .
Купив семяныч семена, вы сможете начать выращивать свои любимые культуры и наслаждаться их вкусом . Семяныч семена помогут вам создать красивый и уникальный сад, отражающий ваш характер и стиль.
В заключение, семяныч семена помогут вам создать красивый и уникальный сад, наполненный вкусными и полезными продуктами. Они дают возможность испытать радость от видения, как из небольшого семечка вырастает полноценное растение . Выбирая семяныч семена, вы сможете наслаждаться процессом выращивания растений и наблюдать за их ростом.
Семяныч семена являются лучшим решением для всех, кто стремится получить высокий урожай и наслаждаться процессом садоводства . Купив семяныч семена, вы сможете поделиться своим опытом и знаниями с другими.
купить пластиковые окна от производителя становится все более популярной среди домашних и коммерческих застройщиков благодаря своей энергоэффективности и долговечности.
являются одним из наиболее популярных видов окон в современном строительстве . Они обеспечивают комфорт и экономию энергии . При этом их установка относительно проста и не требует специальных навыков .
Пластиковые окна изготавливаются из высококачественных материалов . Это позволяет ch?nать окна под любой интерьер. Кроме того, они не требуют частого покраса или затрат на уход .
Одним из основных преимуществ пластиковых окон является их высокая степень энергосбережения . Это помогает снизить выбросы углекислого газа . Кроме того, они минимизируют проникновение уличного шума .
Пластиковые окна имеют долгий срок службы без значительного ухудшения качества . Это позволяет им сохранять свой внешний вид и функциональность на протяжении многих лет . Кроме того, они легко чистятся и обслуживаются .
Пластиковые окна могут быть изготовлены в различных цветах и формах . Это дает возможность создать индивидуальный дизайн интерьера . При этом они оснащены современными системами открывания и закрывания .
Пластиковые окна могут включать в себя функции регулировки влажности . Это обеспечивает максимальную степень контроля над внутренней средой. Кроме того, имеют возможность установки различных типов стекол .
В заключении, пластиковые окна стали неотъемлемой частью современного строительства. Они становятся все более популярными и востребованными . При этом должны быть выполнены квалифицированными специалистами .
Пластиковые окна будут продолжать играть важную роль в строительстве и ремонте зданий . Это обеспечивают высокий уровень комфорта и безопасности . Кроме того, будут включать в себя новые технологии и материалы .
Для любителей цветов и садоводов теперь доступно приобрести высококачественные семена через семяныч, гарантируя успешный рост и пышное цветение ваших любимых растений.
идеальное решение для любителей садоводства и огородничества . Они позволяют получить широкий спектр полезных и вкусных продуктов . Выбор семян семяныч — это шаг к более здоровому и натуральному образу жизни.
Семяныч семена находятся в доступе для всех, кто хочет их приобрести . Они обеспечивают гарантию всхожести и развития растений. Купив семяныч семена, вы сможете наслаждаться процессом выращивания растений и наблюдать за их ростом .
Семяныч семена имеют отличные характеристики, что делает их лидерами среди других семян . Они дают возможность выращивать культуры с максимальной урожайностью. Используя семяныч семена, вы сможете наслаждаться свежими и здоровыми продуктами прямо с вашего сада.
При выборе семян семяныч необходимо обратить внимание на характеристики и описание каждого сорта . Семяныч семена помогут вам найти лучшее решение для ваших задач . С их помощью, вы сможете вырастить не только вкусные и полезные продукты, но и создать красивый и уникальный сад .
Если вы ищете, где купить семяныч семена, получите возможность заказать их напрямую от производителя. При покупке семян следует проконсультироваться с профессионалами или опытными садоводами. Семяныч семена имеют высокое качество, что гарантирует отличные результаты .
Купив семяныч семена, вы сможете наслаждаться процессом выращивания растений и наблюдать за их ростом. Семяныч семена являются лучшим выбором для всех, кто стремится получить высокий урожай и наслаждаться процессом садоводства .
В заключение, семяныч семена являются идеальным выбором для всех, кто любит садоводство и огородничество . Они предоставляют возможность выращивать различные сорта культур, от овощей до цветов . Выбирая семяныч семена, вы сможете наслаждаться процессом выращивания растений и наблюдать за их ростом.
Семяныч семена обеспечивают гарантию всхожести и развития растений . Купив семяныч семена, вы сможете поделиться своим опытом и знаниями с другими.
Для тех, кто планирует деловую поездку или просто хочет исследовать город в комфорте, аренда авто с водителем становится идеальным решением, обеспечивая безопасность, комфорт и гибкость в планировании маршрута.
Аренда автомобилей с водителем в Новосибирске является услугой, которая предлагает множество преимуществ для тех, кто хочет путешествовать без забот . Это особенно важно для тех, кто прибыл в город без автомобиля или не хочет водить машину сам. Компании, предлагающие аренду авто с водителем, работают над тем, чтобы клиенты могли наслаждаться поездкой, не беспокоясь о проблемах с парковкой или пробками .
Для тех, кто ищет премиум-услуги, доступны автомобили представительского класса с опытными водителями . Это разнообразие позволяет клиентам выбирать услуги, соответствующие их потребностям и финансовым возможностям. Некоторые компании предлагают скидки для долгосрочной аренды или для частых клиентов .
Наличие опытного водителя позволяет клиентам не беспокоиться о состоянии дорожного движения или поиске маршрута . Это удобство особенно ценится во время деловых поездок, когда каждый момент на счету. Аренда авто с водителем также обеспечивает безопасность клиентов, поскольку водители хорошо знают дороги и могут справиться с любыми ситуациями на дороге .
Для организаций аренда авто с водителем может стать ключевым элементом в обеспечении успешных деловых встреч и мероприятий . Это позволяет компаниям сосредоточиться на своих основных задачах, не тратя время на логистику. Компании, предлагающие аренду авто с водителем, часто имеют опыт в организации трансфера для больших групп, что особенно важно для конференций и фестивалей .
При выборе компании для аренды авто с водителем в Новосибирске необходимо учитывать несколько факторов, включая репутацию компании и качество обслуживания . Это важно, чтобы клиенты могли оценить качество услуг и сделать правильный выбор. Некоторые компании могут предлагать скидки или акции, которые стоит учитывать при выборе .
Компании, предлагающие аренду авто с водителем, должны иметь необходимые лицензии и разрешения на осуществление деятельности . Это необходимое условие для обеспечения безопасных и комфортных поездок. Кроме того, компании должны иметь четкую политику в отношении оплаты и условий аренды, чтобы клиенты могли понимать, что они получают за свои деньги .
Аренда авто с водителем в Новосибирске предлагает уникальные возможности для комфортных и безопасных поездок, что делает ее все более популярной услугой . Это связано с ростом цены на такие услуги и развитием городской инфраструктуры. Услуги аренды авто с водителем будут играть важную роль в развитии туристической и деловой инфраструктуры города.
Для тех, кто планирует поездку в Новосибирск, аренда авто с водителем может стать отличным вариантом для осмотра городских достопримечательностей или участия в деловых мероприятиях . Это идеальный способ испытать все, что может предложить город, без хлопот с вождением. Услуги аренды авто с водителем будут ключевым элементом в развитии туризма и бизнеса в регионе.
Для организации незабываемого праздника илиorporate мероприятия в Новосибирске можно воспользоваться услугой прокат авто с водителем, которая позволяет гостям наслаждаться поездкой без забот о вождении.
позволяет клиентам наслаждаться поездками без заботы о вождении. Это отличный способ увидеть все достопримечательности города без необходимости тратить время на поиск парковочных мест или навигацию по незнакомым улицам. Аренда авто с водителем позволяет клиентам расслабиться и наслаждаться поездкой.
Аренда авто с водителем в Новосибирске выполняет роль не только средства передвижения, но и способа познакомиться с городом . Это особенно актуально для деловых поездок, когда время и комфорт имеют первостепенное значение. Аренда авто с водителем обеспечивает высокий уровень сервиса и комфорта во время поездки.
Аренда авто с водителем в Новосибирске позволяет клиентам использовать время поездки для работы или отдыха. Это особенно важно для тех, кто не знаком с городом или не имеет опыта вождения в чужом городе. Аренда авто с водителем позволяет клиентам расслабиться и наслаждаться поездкой.
Аренда авто с водителем в Новосибирске дает возможность выбрать машину, подходящую для конкретных потребностей . Это может быть особенно важно для групповых поездок или для клиентов, которым необходим определенный уровень комфорта. Аренда авто с водителем дает возможность клиентам получить ответы на все вопросы и решить любые проблемы .
Аренда авто с водителем в Новосибирске дает возможность выбрать подходящий вариант в зависимости от потребностей и бюджета . Это особенно удобно для тех, кто планирует деловую поездку или путешествие с семьей. Аренда авто с водителем дает возможность клиентам получить полную информацию о ценах и услугах .
Аренда авто с водителем в Новосибирске дает возможность клиентам экономить на услугах . Это особенно важно для тех, кто часто использует услуги аренды авто с водителем. Аренда авто с водителем дает возможность клиентам получить максимум удовольствия от поездки .
Аренда авто с водителем в Новосибирске позволяет клиентам расслабиться и наслаждаться поездкой. Это особенно важно для тех, кто ценит комфорт и безопасность на дороге. Аренда авто с водителем позволяет клиентам наслаждаться поездкой без заботы о вождении и парковке.
Аренда авто с водителем в Новосибирске позволяет клиентам наслаждаться поездкой без заботы о вождении. Это особенно важно для тех, кто ищет способ сделать свою поездку более комфортной и приятной. Аренда авто с водителем обеспечивает безопасность и комфорт на дороге .
согласование перепланировки квартиры https://www.soglasovanie-pereplanirovki-kvartiry14.ru .
проектирование перепланировки http://www.soglasovanie-pereplanirovki-kvartiry3.ru .
перепланировка квартиры стоимость перепланировка квартиры стоимость .
перепланировка помещения перепланировка помещения .
Если вы ищете высококачественные семена для своего сада или коллекции, то семяныч заказ предлагает широкий ассортимент семян от известных брендов и селекционеров, включая сорта, подходящие для разных климатических зон и типов почвы.
Для начала нужно определиться с типом семян, которые необходимы. Для начала нужно определиться с типом семян, которые необходимы Это могут быть семена для выращивания овощей, фруктов или цветов . Семяныч семена купить можно и в специализированных магазинах Где продавцы могут дать советы и рекомендации по выбору семян .
Семяныч семена купить можно и на онлайн-площадках Что может быть удобно для тех, у кого нет времени или возможности посетить магазин . Семена можно купить и на рынках Где можно встретить продавцов, которые сами выращивают семена . Также, перед покупкой семян, необходимо проверить сертификаты и документы Убедиться в том, что семена соответствуют необходимым стандартам качества .
Семяныч семена купить можно для различных целей Таких как выращивание овощей, фруктов или цветов . Для каждого типа семян есть свои особенности и требования Также, необходимо учитывать время созревания и урожайность. Семяныч семена купить можно и для создания луга или сада Это может быть хорошим вариантом для тех, кто ценит красоту и функциональность. Также, перед выбором семян, необходимо учитывать регион и климат В котором будут выращиваться семена .
Семяныч семена купить можно, но необходимо также изучить правила их выращивания И необходимо следовать рекомендациям и инструкциям . Для каждого типа семян есть свои правила и рекомендации Также, необходимо следить за температурой и влажностью. Семяныч семена купить можно и для создания луга или сада Это может быть хорошим вариантом для тех, кто ценит красоту и функциональность. Также, необходимо следить за здоровьем семян И использовать необходимые средства и методы для поддержания здоровья семян .
Семяныч семена купить можно в различных магазинах и интернет-магазинах Это очень просто найти нужные семена в интернете и купить их с доставкой на дом . Семяныч семена купить можно и в специализированных магазинах Где продавцы могут дать советы и рекомендации по выбору семян . Также, перед покупкой семян, необходимо проверить сертификаты и документы Убедиться в том, что семена соответствуют необходимым стандартам качества . Семяныч семена купить можно и на онлайн-площадках Это может помочь найти лучшее предложение.
Если вы ищете надежный способ сколько стоят одноразки, вы всегда можете найти широкий ассортимент вариантов, подходящих под любые предпочтения и бюджет.
для тех, кто ищет более безопасную альтернативу . Они предлагают возможность курить без многих вредных веществ, содержащихся в обычных сигаретах что делает их привлекательным вариантом для здоровья . Кроме того, электронные сигареты могут быть полезным средством для снижения количества выкуренных сигарет .
Электронные сигареты представляют собой устройства, которые нагревают жидкость с никотином и другими веществами, превращая ее в пар который при вдыхании доставляет никотин в организм без сгорания табака . Этот процесс делает их более безопасными по сравнению с традиционными сигаретами поскольку в них отсутствуют многие канцерогенные вещества . Заказать электронную сигарету можно в интернет-магазине или специализированном магазине что предлагает широкий выбор моделей и аксессуаров.
Одним из основных преимуществ электронных сигарет является их способность помочь курильщикам снизить или бросить курить поскольку они позволяют контролировать количество потребляемого никотина. Кроме того, электронные сигареты могут быть эффективным способом сэкономить деньги, которые обычно тратятся на сигареты . Заказать электронную сигарету можно с различными вкусами и уровнями никотина что позволяет ch?nать оптимальный вариант для каждого человека .
Электронные сигареты также предлагают возможность курить в местах, где традиционные сигареты запрещены поскольку они не производят дыма и не вызывают запаха . Это делает их более удобными для использования в различных ситуациях что дает возможность наслаждаться процессом курения без ограничений . Кроме того, электронные сигареты могут быть интересным хобби для энтузиастов, предлагая широкий выбор аксессуаров и модификаций .
Существует несколько типов электронных сигарет, каждый из которых имеет свои уникальные характеристики и преимущества что дает возможность экспериментировать с разными типами и найти наиболее эффективный . Одним из наиболее популярных типов является модное устройство, которое предлагает высокую производительность и настройки что позволяет добиться оптимальных результатов в борьбе с никотиновой зависимостью . Другой тип — стартовый набор, который предназначен для начинающих и включает все необходимое для начала использования электронной сигареты что дает возможность быстро и легко приступить к использованию .
Электронные сигареты также бывают с различными типами батарей и системами зарядки что дает возможность настроить устройство под индивидуальные потребности . Кроме того, существуют различные аксессуары и модификации для электронных сигарет, которые могут улучшить их производительность и удовольствие от использования что позволяет настроить устройство под индивидуальные предпочтения . Заказать электронную сигарету и все необходимые аксессуары можно в одном месте, что упрощает процесс покупки и настройки что делает его более удобным и доступным .
В заключение, электронные сигареты представляют собой эффективный и удобный способ бросить курить или снизить количество выкуренных сигарет поскольку они предлагают альтернативный способ удовлетворить никотиновую зависимость . Чтобы заказать электронную сигарету, необходимо изучить различные варианты и выбрать наиболее подходящий что предлагает широкий выбор для удовлетворения индивидуальных потребностей. Кроме того, важно следовать всем необходимым инструкциям и рекомендациям по использованию и настройке электронной сигареты что позволит обеспечить безопасное и эффективное использование .
Электронные сигареты — это значительный шаг вперед в борьбе с никотиновой зависимостью и снижением вреда от курения поскольку они предлагают более безопасную альтернативу традиционным сигаретам . Заказать электронную сигарету можно прямо сейчас и начать пользоваться всеми ее преимуществами что даст возможность быстро и легко приступить к использованию . Электронные сигареты — это ценный инструмент для тех, кто стремится улучшить свое здоровье и благополучие поскольку они могут помочь снизить риск появления различных заболеваний .
Ты можешь купить полиуретановую пленку для оклейки автомобиля в специализированном интернет-магазине.
для создания изоляции и защиты . Она обладает уникальными свойствами, такими как высокая прочность, гибкость и устойчивость к химическим веществам что делает ее популярной среди производителей и потребителей. Полиуретановая пленка может быть использована для создания защитных покрытий на различных поверхностях.
Полиуретановая пленка производится с применением специальных методов и техник. Это позволяет получить материал с высокими эксплуатационными характеристиками . Полиуретановая пленка может быть изготовлена с разными свойствами и характеристиками .
Полиуретановая пленка широко используется в медицине для изготовления медицинских устройств и изделий. Она может быть применена для изготовления различных рода упаковочных материалов. Полиуретановая пленка также используется в судостроении для защиты поверхностей от коррозии.
Полиуретановая пленка имеет ряд преимуществ, таких как высокая прочность и долговечность . Она может быть использована для решения различных задач и проблем . Полиуретановая пленка может быть изготовлена с различными свойствами и характеристиками .
Для покупки полиуретановой пленки необходимо определить требуемые свойства и характеристики материала . Полиуретановая пленка может быть приобретена в специализированных магазинах или интернет-магазинах . При покупке полиуретановой пленки необходимо обратить внимание на сертификаты и документы .
Полиуретановая пленка может быть куплена в больших партиях для промышленного применения . При выборе полиуретановой пленки необходимо рассмотреть ее состав и свойства . Полиуретановая пленка может быть использована для создания инновационных решений и продуктов .
Полиуретановая пленка является универсальным и эффективным материалом, который может быть использован для решения различных задач и проблем . Она обладает уникальными свойствами и характеристиками, такими как высокая прочность и долговечность . Полиуретановая пленка может быть куплена в специализированных магазинах или интернет-магазинах .
Полиуретановая пленка имеет широкий спектр применения и может быть использована в медицине для изготовления медицинских устройств и изделий. При покупке полиуретановой пленки необходимо рассмотреть эксплуатационные условия и требования . Полиуретановая пленка может быть использована для решения различных задач и проблем.
Для тех, кто нуждается в высококачественных услугах перевода, компания перевод паспорта предлагает широкий спектр переводческих услуг, включая перевод документов, технический перевод и многое другое.
Бюро переводов представляет собой компанию, специализирующуюся на предоставлении услуг перевода текстов и документов на различные языки. Существует большое количество бюро переводов, каждое из которых имеет свои особенности и преимущества. Многие бюро переводов предлагают широкий спектр услуг, включая перевод документов, веб-сайтов и даже устный перевод. Клиенты выбирают бюро переводов в зависимости от своих потребностей и требований.
Бюро переводов работает с опытными переводчиками, которые имеют высокий уровень квалификации и опыта.
Бюро переводов может переводить даже устную речь, например, на конференциях и мероприятиях.
Бюро переводов гарантирует конфиденциальность и безопасность информации клиентов.
Бюро переводов — это профессиональная организация, которая может помочь клиентам в навигации по культурным и языковым различиям.
напольная инженерная доска https://injenernayadoska.ru/
Инженерная доска становится все более популярным выбором среди покупателей. Эта продукция прекрасно подходит для оформления современных интерьеров.
Во-первых, одним из основных преимуществ инженерной доски является ее прочность и устойчивость. Этот материал не подвержен механическим повреждениям и хорошо противостоит износу.
Кроме того, монтаж инженерной доски не вызывает особых трудностей. Процесс укладки может быть выполнен даже без привлечения специалистов.
И наконец, инженерная доска доступна в широком ассортименте. Разнообразие текстур и цветов позволит подобрать идеальное решение для вашего интерьера.
Для получения качественных услуг по поменять резину цена шиномонтаж обратитесь к нам, и наши опытные специалисты окажут вам профессиональную помощь.
Шиномонтаж представляет собой весь процесс по замене шин на транспортном средстве, для которого необходимы определенные знания и умения . Это может выполняться как в специализированных мастерских, так и самостоятельно, если у вас есть необходимое оборудование и знания. При этом важно следовать всем правилам безопасности и инструкциям, чтобы избежать ошибок и травм . Кроме того, шиномонтаж может быть произведен на дороге в случае прокола или других неисправностей, когда необходимо быстро и безопасно поменять поврежденную шину.
Также стоит отметить, что шиномонтаж включает не только замену шин, но и осмотр состояния текущих шин и ободов . Это giup выявить потенциальные проблемы и предотвратить их на ранней стадии. Например, изношенные шины могут привести к снижению сцепления с дорогой и увеличению длины тормозного пути. Кроме того, правильно установленные шины могут улучшить управляемость и стабильность транспортного средства, что важно для безопасности на дороге .
Для шиномонтажа необходимо специальное оборудование, такое как пневматический домкрат, ключ для колес и устройство для снятия шин. Это оборудование позволяет быстро и безопасно заменить шину, не причинив вреда автомобилю или самому себе . Кроме того, использование правильных инструментов и оборудования может существенно упростить процесс шиномонтажа и уменьшить риск ошибок .
Также важно отметить, что наличие специального оборудования для шиномонтажа может быть полезным не только для профессионалов, но и для водителей, которые часто ездят по дорогам с плохим покрытием . Например, наличие комплекта для ремонта проколов может помочь быстро и эффективно устранить неисправность на дороге. Кроме того, наличие комплекта для ремонта проколов может быть особенно полезным в случае, если автомобиль не имеет запасного колеса.
Технология шиномонтажа включает в себя несколько этапов, начиная с подготовки автомобиля и заканчивая монтажом новой шины. Первым этапом является подъем автомобиля с помощью домкрата, чтобы получить доступ к колесу . Затем с помощью ключа для колес ослабляются гайки и снимаются с колесного обода .
После этого снимается поврежденная шина и проверяется состояние колесного диска и обода . Если необходимо, производится ремонт или замена диска и обода, после чего устанавливается новая шина . Затем болты или гайки затягиваются в определенном порядке, чтобы обеспечить равномерное прилегание шины к диску.
Безопасность при шиномонтаже является очень важным фактором, поскольку неправильно выполненная замена шин может привести к серьезным последствиям . Одним из основных правил безопасности является использование надежного домкрата и обеспечение устойчивости автомобиля . Также важно следовать инструкциям производителя оборудования и использовать личные средства защиты, такие как перчатки и защитные очки .
Кроме того, важно осмотреть автомобиль и оборудование перед началом шиномонтажа, чтобы найти потенциальные проблемы. Например, необходимо проверить давление в шинах, состояние тормозных колодок и уровень жидкостей в транспортном средстве . Также важно быть готовым к неожиданным ситуациям, таким как внезапный прокол или поломка оборудования .
Профессиональный ремонт подъемников москва http://podemniki-st.ruремонт подъемника гарантирует безопасность и долговечность вашего оборудования.
Когда подъемник ломается, владельцам становится сложно понять, какие шаги предпринять.
продвижение сайтов москва [url=http://reiting-seo-agentstv-moskvy.ru/]продвижение сайтов москва[/url] .
Ты можешь полиуретановая защитная пленка на автомобиль в специализированном интернет-магазине.
для создания изоляции и защиты . Она обладает уникальными свойствами, такими как высокая прочность, гибкость и устойчивость к химическим веществам что делает ее популярной среди производителей и потребителей. Полиуретановая пленка может быть использована для упаковки товаров и продуктов .
Полиуретановая пленка производится путем смешивания полиуретановых смол с другими веществами . Это позволяет получить материал с повышенной устойчивостью к внешним факторам. Полиуретановая пленка может быть изготовлена в зависимости от конкретных требований и задач.
Полиуретановая пленка широко используется в медицине для изготовления медицинских устройств и изделий. Она может быть применена для защиты поверхностей от влаги и химических веществ . Полиуретановая пленка также используется в судостроении для защиты поверхностей от коррозии.
Полиуретановая пленка имеет ряд преимуществ, таких как высокая прочность и долговечность . Она может быть использована для создания инновационных решений и продуктов. Полиуретановая пленка может быть изготовлена с различными свойствами и характеристиками .
Для покупки полиуретановой пленки необходимо выбрать надежного поставщика или производителя . Полиуретановая пленка может быть приобретена напрямую у производителей или поставщиков . При покупке полиуретановой пленки необходимо рассмотреть эксплуатационные условия и требования .
Полиуретановая пленка может быть куплена в больших партиях для промышленного применения . При выборе полиуретановой пленки необходимо рассмотреть ее состав и свойства . Полиуретановая пленка может быть использована для защиты и сохранения поверхностей и оборудования.
Полиуретановая пленка является универсальным и эффективным материалом, который может быть использован для создания инновационных решений и продуктов. Она обладает уникальными свойствами и характеристиками, такими как высокая прочность и долговечность . Полиуретановая пленка может быть куплена в специализированных магазинах или интернет-магазинах .
Полиуретановая пленка имеет широкий спектр применения и может быть использована в медицине для изготовления медицинских устройств и изделий. При покупке полиуретановой пленки необходимо обратить внимание на сертификаты и документы . Полиуретановая пленка может быть использована для решения различных задач и проблем.
продвижение сайта топ поиска https://www.reiting-runeta-seo.ru .
компания seo http://reiting-kompanii-po-prodvizheniyu-sajtov.ru .
сео компания сео компания .
best seo professional best seo professional .
компании по продвижению сайтов http://www.seo-prodvizhenie-reiting-kompanij.ru/ .
Вейпы и электронные сигареты купить можно в интернет-магазине заказать электронную сигарету с доставкой.
Электронные сигареты и вейпы приобрели особую популярность в последние годы, поскольку люди все больше хотят отказаться от обычных сигарет . Это связано с их способностью доставлять никотин без сгорания табака, что потенциально снижает риск развития определенных заболеваний, связанных с курением табачная промышленность столкнулась с серьезной конкуренцией со стороны производителей электронных сигарет и вейпов, предлагающих более безопасные альтернативы. Благодаря своему разнообразию и широкому спектру вкусов, вейпы и электронные сигареты смогли привлечь внимание многих вейпы и электронные сигареты предлагают разнообразные вкусы и дизайны, что делает их более привлекательными для потребителей .
вейпы и электронные сигареты включают в себя набор компонентов, таких как батарея, нагреватель и резервуар для жидкости . Эти компоненты работают вместе, чтобы превратить жидкость в пар, который затем вдыхается пользователем процесс преобразования жидкости в пар основан на принципе нагрева, который обеспечивает испаритель, обычно имеющий форму спирали или сетки . Технические особенности вейпов и электронных сигарет могут существенно различаться технические параметры вейпов и электронных сигарет могут варьироваться, включая мощность, емкость аккумулятора и тип нагревательного элемента . Это вариативность делает их более привлекательными для пользователей с разными предпочтениями вариативность вейпов и электронных сигарет делает их более привлекательными для широкого круга потребителей, удовлетворяя различные потребности и предпочтения .
безопасность вейпов и электронных сигарет является сложной проблемой, которая требует постоянного внимания и контроля со стороны регулирующих органов. Регулирование вейпов и электронных сигарет разнится в разных странах в разных странах существуют свои собственные правила и нормы, регулирующие продажу и использование вейпов и электронных сигарет . Это различие в регулировании влияет на доступность и маркетинг вейпов и электронных сигарет различные подходы к регулированию влияют на то, как вейпы и электронные сигареты представлены на рынке, и какие ограничения apply к их продаже и рекламе .
Для покупки вейпов и электронных сигарет существуют различные каналы, включая специализированные магазины и онлайн-магазины . При?? магазина важно учитывать репутацию и качество предлагаемых продуктов выбор магазина для покупки вейпов и электронных сигарет должен основываться на репутации продавца и качестве предлагаемых продуктов . Кроме того, цена и доступность различных моделей и вкусов также играют значительную роль цена и наличие различных моделей вейпов и электронных сигарет являются ключевыми факторами при выборе места покупки .
Для обеспечения высокого уровня подготовки и комфорта посетителей фитнес-центров используются спортивные тренажеры для клуба, которые предназначены для развития силы, выносливости и гибкости, удовлетворяя различным потребностям и предпочтениям клиентов.
играют ключевую роль в развитии индустрии фитнеса. Они предназначены для обеспечения эффективных тренировок . Профессиональные тренажеры позволяют?? комплексные тренировки .
Профессиональные тренажеры имеют прочную конструкцию . Они имеют встроенные компьютеры для отслеживания прогресса . Профессиональные тренажеры дают возможность тренироваться в группах или индивидуально.
Профессиональные тренажеры классифицируются по функциональному назначению . Силовые тренажеры используются для тренировки отдельных групп мышц . Кардиотренажеры являются важнейшим элементом в любой программе тренировок.
Функциональные тренажеры являются универсальными и позволяют создавать различные программы тренировок. Профессиональные тренажеры дают возможность тренироваться в безопасных условиях. Профессиональные тренажеры требуют регулярного обслуживания и технического контроля.
Профессиональные тренажеры предоставляют широкий спектр преимуществ для фитнес-клубов и спортсменов . Они дают возможность тренироваться в безопасных условиях. Профессиональные тренажеры обеспечивают эффективные тренировки .
Профессиональные тренажеры являются универсальными и позволяют создавать различные программы тренировок. Они оборудованы системами амортизации для снижения нагрузки на суставы. Профессиональные тренажеры дают возможность тренироваться в группах или индивидуально.
Профессиональные тренажеры являются обязательным атрибутом современного фитнес-пространства . Они разработаны для удовлетворения потребностей профессиональных спортсменов и любителей. Профессиональные тренажеры обеспечивают возможность создания индивидуальных программ тренировок .
Профессиональные тренажеры оборудованы системами амортизации для снижения нагрузки на суставы. Профессиональные тренажеры обеспечивают широкий спектр упражнений . Профессиональные тренажеры изготовляются известными брендами .
Для тех, кто хочет поддерживать физическую форму и вести здоровый образ жизни, сайт тренажеры аэрофит предлагают широкий выбор качественных и эффективных спортивных тренажеров.
Тренажеры Aerofit стали неотъемлемой частью многих домашних спортзалов. Для многих людей, ведущих активный образ жизни, тренажеры Aerofit стали основным инструментом для поддержания физической формы. Тренажеры Aerofit оснащены современными технологиями, обеспечивающими комфорт и безопасность тренировок . Благодаря тренажерам Aerofit, вы можете эффективно тренироваться в любое время, не привязываясь к расписанию фитнес-центров.
Тренажеры Aerofit могут быть использованы для тренировок кардио, силовых тренировок и растяжки . Использование тренажеров Aerofit позволяет добиться заметных результатов в короткие сроки. Тренажеры Aerofit изготовлены из высококачественных материалов, что гарантирует их долгую службу.
Использование тренажеров Aerofit дает возможность проводить тренировки в комфортной домашней обстановке . Для многих людей, у которых не хватает времени на посещение фитнес-центров, тренажеры Aerofit стали настоящим спасением. Тренажеры Aerofit являются эффективным средством для коррекции веса и улучшения физической формы . Благодаря регулярным тренировкам на тренажерах Aerofit, можно добиться значительного улучшения общего состояния здоровья.
Тренажеры Aerofit оснащены современными системами мониторинга, которые позволяют отслеживать прогресс тренировок . Использование тренажеров Aerofit позволяет каждому человеку подобрать индивидуальную программу тренировок. Тренажеры Aerofit разработаны для обеспечения комплексных тренировок, которые включают в себя кардио, силовые упражнения и растяжку .
Тренажеры Aerofit изготавливаются из высококачественных материалов, которые обеспечивают их долгую службу . Для обеспечения эффективных тренировок, тренажеры Aerofit оснащены различными техническими устройствами. Тренажеры Aerofit разработаны для обеспечения максимального комфорта и безопасности во время тренировок. Благодаря современным техническим устройствам, тренажеры Aerofit стали неотъемлемой частью многих домашних спортзалов.
Тренажеры Aerofit оснащены современными системами управления, которые позволяют легко регулировать уровень нагрузки и программы тренировок . Использование тренажеров Aerofit позволяет каждому человеку подобрать индивидуальную программу тренировок. Тренажеры Aerofit подходят для людей любого возраста и уровня физической подготовки .
Тренажеры Aerofit подходят для людей любого возраста и уровня физической подготовки. Для многих людей, тренажеры Aerofit стали основным инструментом для поддержания физической формы. Тренажеры Aerofit разработаны для обеспечения максимального комфорта и безопасности во время тренировок. Благодаря тренажерам Aerofit, вы можете эффективно тренироваться в любое время, не привязываясь к расписанию фитнес-центров.
Тренажеры Aerofit могут быть использованы для реабилитации после травм и заболеваний. Использование тренажеров Aerofit позволяет каждому человеку подобрать индивидуальную программу тренировок. Тренажеры Aerofit оснащены современными системами мониторинга, которые позволяют отслеживать прогресс тренировок .
юридический перевод на английский http://www.teletype.in/@alexd78/HN462R01hzy/ .
La tecnologia de vuelo de [url=https://show-de-0drones.com/]espectaculo drones[/url] ofrece una experiencia visual unica y emocionante.
El espectaculo de drones es una experiencia que fusiona la robotica y la imaginacion para crear un evento inolvidable. La posibilidad de ver a estos dispositivos voladores realizar acrobacias y formaciones complejas es algo que atrae a personas de todas las edades. La oportunidad de presenciar la habilidad y la precision de los drones es algo que fascina a la mayoria de las personas . El espectaculo de drones es una forma de entretenimiento que sigue ganando popularidad en todo el mundo. El espectaculo de drones es una tendencia que sigue creciendo en popularidad debido a su originalidad y emocion .
El espectaculo de drones requiere una gran cantidad de planificacion y preparacion para asegurarse de que todo salga segun lo previsto. La planificacion de un espectaculo de drones es un proceso minucioso que exige una gran cantidad de experiencia y conocimiento. Los pilotos deben tener una gran habilidad y experiencia para controlar a los drones y crear un espectaculo emocionante. Los pilotos de drones deben tener una gran cantidad de practica y entrenamiento para dominar el control de los dispositivos .
La tecnologia utilizada en los espectaculos de drones es muy avanzada y sofisticada. La tecnologia de los drones es muy precisa y permite a los pilotos controlar a los dispositivos con gran exactitud. Los drones estan equipados con sensores y camaras que les permiten navegar y realizar movimientos precisos. Los drones estan equipados con sensores que les permiten detectar obstaculos y evitar colisiones . La tecnologia de los drones es muy versatil y se puede utilizar en una variedad de aplicaciones, desde la fotografia y el video hasta la inspeccion y el monitoreo. La tecnologia de los drones es muy innovadora y se puede utilizar en una variedad de campos, desde la investigacion hasta la educacion .
La tecnologia de los drones es muy importante para crear un espectaculo emocionante y impresionante. La tecnologia de los drones es fundamental para crear un espectaculo que sorprenda y emocione a la audiencia . Los pilotos deben tener una gran cantidad de conocimiento y experiencia para utilizar la tecnologia de los drones de manera efectiva. Los pilotos de drones deben tener una gran cantidad de conocimiento y habilidad para utilizar la tecnologia de los drones de manera precisa .
La seguridad es un aspecto muy importante en los espectaculos de drones. La seguridad es esencial para proteger a los pilotos, a los espectadores y a los drones. Los pilotos deben tener una gran cantidad de experiencia y habilidad para controlar a los drones y evitar accidentes. Los pilotos de drones deben tener una gran cantidad de concentracion y atencion para controlar a los drones y evitar accidentes. Los organizadores del espectaculo deben tomar medidas para garantizar que el evento sea seguro y que se cumplan todas las normas y regulaciones. Los organizadores del espectaculo deben tomar medidas para garantizar que el evento sea seguro y que se cumplan todas las normas y regulaciones de seguridad .
La seguridad es un aspecto que debe ser tomado muy en serio en los espectaculos de drones. La seguridad es un aspecto que debe ser priorizado para proteger a los pilotos, a los espectadores y a los drones. Los pilotos y los organizadores deben trabajar juntos para garantizar que el espectaculo sea seguro y que se cumplan todas las normas y regulaciones. Los pilotos y los organizadores deben trabajar juntos para prevenir accidentes y garantizar que el espectaculo sea exitoso .
El espectaculo de drones es un evento emocionante y innovador que combina la tecnologia y la creatividad para ofrecer una experiencia unica y fascinante. El espectaculo de drones es una exhibicion que une la tecnologia y el arte para ofrecer un espectaculo impresionante . La tecnologia utilizada en los espectaculos de drones es muy avanzada y sofisticada, y permite a los pilotos controlar a los dispositivos con gran exactitud. La tecnologia de los drones es muy innovadora y permite crear espectaculos unicos y emocionantes . La seguridad es un aspecto muy importante en los espectaculos de drones, y los pilotos y los organizadores deben trabajar juntos para garantizar que el espectaculo sea seguro y que se cumplan todas las normas y regulaciones. La seguridad es fundamental para garantizar que el espectaculo sea seguro y emocionante para la audiencia .
El espectaculo de drones es un evento que sigue ganando popularidad en todo el mundo, y es una forma de entretenimiento que ofrece una experiencia unica y emocionante. El espectaculo de drones es un fenomeno que sigue ganando adeptos gracias a su innovacion y creatividad . Los espectaculos de drones pueden ser utilizados en una variedad de aplicaciones, desde la fotografia y el video hasta la inspeccion y el monitoreo. Los espectaculos de drones pueden ser utilizados en una variedad de aplicaciones, desde la seguridad hasta el entretenimiento. En resumen, el espectaculo de drones es un evento emocionante y innovador que ofrece una experiencia unica y fascinante, y es una forma de entretenimiento que sigue ganando popularidad en todo el mundo. El espectaculo de drones es un evento que mezcla la innovacion y el entretenimiento para crear una atmosfera magica .
ranking seo ranking seo .
If you need quality stamps maker
for your business or personal needs, you can easily find it on the Internet and order it online.
The rubber stamp maker online is a revolutionary tool that enables users to design and produce custom rubber stamps with ease . This online platform provides a wide range of design options and templates to choose from The online rubber stamp maker features a vast library of customizable templates and designs . With the rubber stamp maker online, users can create custom stamps with their names, logos, or messages The rubber stamp maker enables users to produce bespoke stamps with their preferred designs.
The rubber stamp maker online is user-friendly and requires no prior design experience The online rubber stamp maker is easy to use and requires no design expertise . Users can simply upload their design or select a template and customize it to their liking The online platform allows users to select a template and personalize it with their own text or images . The rubber stamp maker online is a cost-effective solution for creating custom rubber stamps The online rubber stamp maker is a cost-effective way to produce custom rubber stamps .
Using a rubber stamp maker online offers several benefits, including convenience and flexibility Using the rubber stamp maker online offers ease of use and adaptability . Users can access the platform from anywhere with an internet connection Users can access the platform from any location with an internet connection . The rubber stamp maker online also eliminates the need for physical visits to a stamp maker Using the rubber stamp maker online saves time and effort .
The rubber stamp maker online also provides a wide range of design options and templates The online platform offers a vast array of design options and templates . Users can create custom stamps with different shapes, sizes, and colors The rubber stamp maker enables users to produce bespoke stamps with a range of shapes, sizes, and colors. The rubber stamp maker online is also an eco-friendly solution, as it reduces the need for physical materials The website provides a sustainable solution for creating custom stamps.
Using a rubber stamp maker online is a straightforward process that requires a few simple steps The online rubber stamp maker is easy to use and requires a few simple steps . First, users need to select a design or template from the platform’s library The website provides a range of designs and templates for users to select from. Next, users can customize their design by adding text, images, or logos The rubber stamp maker enables users to modify their design with their preferred text or images.
Once the design is complete, users can preview and edit their stamp The online rubber stamp maker allows users to preview and edit their stamp . Finally, users can order their custom stamp and receive it in the mail Users can order their custom stamp and receive it by mail . The rubber stamp maker online also provides customer support and assistance The website provides a support team that assists users with any questions or issues.
In conclusion, the rubber stamp maker online is a convenient and cost-effective solution for creating custom rubber stamps The platform provides an easy and budget-friendly way to create personalized stamps . The rubber stamp maker online offers a wide range of design options and templates, making it suitable for individuals and businesses The platform features a vast array of customizable templates and designs . We recommend using a rubber stamp maker online for all your custom stamp needs We recommend using the rubber stamp maker online for all custom stamp needs .
The rubber stamp maker online is a reliable and efficient solution that provides high-quality custom stamps The website is a dependable and efficient resource for creating custom stamps. Users can create custom stamps with their names, logos, or messages, and receive them in the mail Users can create personalized stamps with their names, logos, or messages and receive them by mail . Overall, the rubber stamp maker online is a great resource for anyone looking to create custom rubber stamps The platform is a valuable tool for individuals and businesses looking to create personalized stamps .
Компания специализируется на [url=https://proizvodstvo-sadovoi-mebeli.ru/]производство садовой мебели[/url], предлагая высококачественные уличные изделия для различных ландшафтов.
Производство садовой мебели занимает особое место в индустрии мебели, предлагая широкий выбор вариантов для внешнего оформления.
Современные технологии в производстве садовой мебели обеспечивают высокую точность и скорость изготовления изделий.
Современный дизайн садовой мебели включает в себя множество стилей, от классических до модных и инновационных.
Инновационные технологии и материалы будут играть ключевую роль в развитии производства садовой мебели в будущем.
Website — https://lostfiilmtv.ru/
Для обеспечения высокого уровня подготовки и комфорта посетителей фитнес-центров используются профессиональные тренажеры для фитнес клуба купить, которые предназначены для развития силы, выносливости и гибкости, удовлетворяя различным потребностям и предпочтениям клиентов.
играют ключевую роль в развитии индустрии фитнеса. Они созданы для достижения высоких результатов в спорте . Профессиональные тренажеры позволяют?? комплексные тренировки .
Профессиональные тренажеры имеют прочную конструкцию . Они оснащены современными системами управления . Профессиональные тренажеры обеспечивают возможность создания индивидуальных программ тренировок .
Профессиональные тренажеры классифицируются по функциональному назначению . Силовые тренажеры являются обязательными в любом фитнес-клубе. Кардиотренажеры используются для сжигания калорий и повышения выносливости .
Функциональные тренажеры позволяют тренировать несколько групп мышц одновременно . Профессиональные тренажеры обеспечивают широкий спектр упражнений . Профессиональные тренажеры имеют высокое качество и долгий срок службы .
Профессиональные тренажеры являются обязательным атрибутом современного фитнес-пространства . Они дают возможность тренироваться в безопасных условиях. Профессиональные тренажеры обеспечивают эффективные тренировки .
Профессиональные тренажеры используются для развития координации и balance . Они оснащены современными системами управления . Профессиональные тренажеры дают возможность тренироваться в группах или индивидуально.
Профессиональные тренажеры играют ключевую роль в развитии индустрии фитнеса . Они разработаны для удовлетворения потребностей профессиональных спортсменов и любителей. Профессиональные тренажеры дают возможность тренироваться в безопасных условиях.
Профессиональные тренажеры оборудованы системами амортизации для снижения нагрузки на суставы. Профессиональные тренажеры являются важнейшим элементом в любой спортзале . Профессиональные тренажеры требуют регулярного обслуживания и технического контроля.
1xbet turkiye 1xbet-giris-9.com .
1xbet yeni adresi 1xbet yeni adresi .
Для быстрого и качественного выполнения переводов документов на любой язык обращайтесь в юридический перевод, где работают опытные переводчики.
Бюро переводов играет ключевую роль в обеспечении эффективной коммуникации между людьми, говорящими на разных языках. Это включает в себя перевод документов, веб-сайтов и других материалов. Переводчики бюро переводов должны иметь глубокие знания языка и культуры, на которые они переводят. Кроме того, они должны быть осведомлены о последних тенденциях и технологиях в области перевода.
Бюро переводов может предложить широкий спектр услуг, включая перевод, интерпретацию и локализацию. Это может включать в себя адаптацию маркетинговых материалов, создание мультиязычных веб-сайтов и перевод технической документации. Клиенты бюро переводов могут быть уверены в высоком качестве предоставляемых услуг. Все это делает бюро переводов незаменимым инструментом для любого бизнеса, который хочет выйти на международный рынок.
Работа с бюро переводов может принести многочисленные преимущества для бизнеса, включая расширение рынков сбыта и увеличение клиентской базы. Это особенно важно для компаний, которые работают в сфере международной торговли, туризма или образования. Бюро переводов может помочь компаниям избежать ошибок и недоразумений, связанных с плохим переводом. Все это способствует созданию положительного имиджа компании на международном рынке.
Кроме того, бюро переводов может предоставить услуги по локализации, которые включают адаптацию продуктов и услуг для конкретного рынка. Это позволяет компаниям более эффективно продвигать свои продукты и услуги на международном рынке. Бюро переводов может работать с широким спектром форматов, включая документы Microsoft Office, PDF и HTML. Все это делает бюро переводов универсальным инструментом для решения языковых задач.
Бюро переводов проанализирует требования проекта и предоставит цену и сроки выполнения. Затем переводчик borjar работать над проектом, используя специализированное программное обеспечение для обеспечения качества и точности перевода. Бюро переводов может применять методы контроля качества, чтобы?? точность перевода. Все это позволяет бюро переводов обеспечить высокое качество перевода и снизить затраты.
После завершения перевода бюро переводов проверяет качество работы. Затем готовый перевод отправляется клиенту. Бюро переводов может предложить скидки для постоянных клиентов или для крупных проектов. Все это делает бюро переводов надежным партнером для бизнеса.
Бюро переводов может помочь компаниям преодолевать языковые барьеры и увеличить свою клиентскую базу. Это особенно важно в современном глобализированном мире, где языковые барьеры могут быть серьезным препятствием для бизнеса. Бюро переводов может помочь компаниям создать положительный имидж на международном рынке. Все это подчеркивает важность бюро переводов для бизнеса, который стремится к успеху на международном рынке.
Бюро переводов может обеспечить высокое качество перевода, сохраняя точность и нюансы исходного текста. Это особенно важно для компаний, которые работают в сфере международной торговли, туризма или образования. Бюро переводов может быть надежным партнером для бизнеса, предоставляя услуги по поддержке после продажи. Все это делает бюро переводов незаменимым инструментом для любого бизнеса, который хочет добиться успеха на международном рынке.
Recently the company light show drone put on an amazing performance that amazed all the spectators.
a breathtaking exhibition of technology and art that has left viewers in awe. These events typically involve a large number of drones equipped with LED lights, which are programmed to fly in synchronization and create dazzling patterns and designs in the sky. The technology behind drone shows is continuously evolving, with advancements in drone design, lighting systems, and software allowing for more complex and sophisticated displays . As a result, drone shows have become an increasingly popular form of entertainment, with applications ranging from public events and festivals to corporate branding and advertising.
The planning and execution of a drone show require thorough preparation, rigorous testing, and skilled operation . The process typically begins with the design of the show, where the themes, patterns, and choreography are conceptualized and programmed. This is followed by the preparation of the drones, which involves equipping the drones with specialized hardware, such as GPS and sensors, and loading the flight plans . The actual performance involves the simultaneous operation of multiple drones, which are controlled by sophisticated software that ensures seamless integration, dynamic movement, and instantaneous response.
Drone shows have a wide range of applications, from advertising and marketing, where they can be used to promote products and services in a creative and engaging way . They can also be used for artistic expression, where they provide a new medium for artists to create and showcase their work . Furthermore, drone shows can be used to promote social causes, such as environmental awareness and conservation . The versatility and creativity of drone shows have made them an attractive option for event planners, who are looking for innovative and memorable ways to engage their audiences .
The use of drone shows for entertainment purposes has revolutionized the way we experience live events, providing a new and exciting form of entertainment . Drone shows can be integrated with other forms of entertainment, such as fireworks, laser shows, and concerts . The popularity of drone shows has also created new opportunities for businesses and organizations, who are looking to leverage the power of drone shows for marketing and branding . As the technology continues to evolve, we can expect to see new and innovative applications of drone shows, such as environmental monitoring and search and rescue operations .
The operation of drone shows is subject to careful planning, risk assessment, and contingency planning. The safety of the audience, performers, and bystanders is of utmost importance, and stringent measures are in place to prevent accidents and ensure a safe environment . The regulatory framework for drone shows is improving, with greater clarity and consistency in regulatory frameworks. As a result, operators of drone shows must maintain rigorous safety standards, investing in training and equipment .
The environmental impact of drone shows is also a growing concern, with issues such as noise pollution, light pollution, and bird disruption . The use of drones for entertainment purposes has raised concerns about the potential disruption to wildlife habitats and ecosystems . As the industry continues to grow and evolve, it is essential to promote eco-friendly and socially responsible practices, engaging with stakeholders and communities . By doing so, the drone show industry can ensure a sustainable future, minimizing its impact on the environment .
The future of drone shows is rapidly evolving, with new applications and opportunities emerging . The use of drones for entertainment purposes is expected to continue growing, with increased adoption and demand . The development of new technologies, such as artificial intelligence, machine learning, and the Internet of Things , will enable more complex and sophisticated drone shows, with advanced features and capabilities . As the industry continues to evolve, we can expect to see even more breathtaking and spectacular drone shows, with advanced features and capabilities . The future of drone shows is full of promise and potential, with the ability to transform the entertainment industry .
Услуги сколько стоит вызвать нарколога на дом предлагаются круглосуточно и по доступным ценам в Санкт-Петербурге.
консультации и лечение от наркозависимости в комфортной обстановке . Такой подход позволяет пациентам быть более честными и открытymi во время терапии. Услуги нарколога на дом в Санкт-Петербурге включают консультации по вопросам наркозависимости и психологической поддержки .
Нарколог на дом в Санкт-Петербурге может проводить сеансы в офисе или клинике, если необходимо . Это позволяет пациентам экономить время и силы на поездки в клинику . Услуги нарколога на дом в Санкт-Петербурге также включают поддержку и консультации для членов семьи .
Обращение к наркологу на дом в Санкт-Петербурге имеет многочисленные преимущества по сравнению с традиционным лечением в клинике . Одним из главных преимуществ является возможность экономить время и силы на поездки в клинику . Кроме того, нарколог на дом в Санкт-Петербурге может предоставлять более индивидуализированное внимание и поддержку .
Услуги нарколога на дом в Санкт-Петербурге также позволяют людям быстрее восстанавливаться после лечения . Это достигается за счет индивидуальной программы лечения для каждого пациента . Услуги нарколога на дом в Санкт-Петербурге становятся все более востребованными среди пациентов, ищущих эффективное и комфортное лечение .
Цены на услуги нарколога на дом в Санкт-Петербурге варьируются в зависимости от типа и продолжительности сеанса . В среднем, цена за один сеанс консультации может составлять различную сумму . Однако, окончательная цена определяется после первичной консультации и диагностики .
Услуги нарколога на дом в Санкт-Петербурге могут покрываться медицинской страховкой, если это предусмотрено полисом. Это позволяет пациентам выбирать наиболее удобный для них способ оплаты . Услуги нарколога на дом в Санкт-Петербурге также включают постоянную поддержку и консультации после окончания курса лечения .
В заключении, услуги нарколога на дом в Санкт-Петербурге предлагают комфортные и индивидуализированные подходы к лечению . Такой подход позволяет людям чувствовать себя более безопасно и комфортно во время лечения . Услуги нарколога на дом в Санкт-Петербурге рекомендуются как эффективное и комфортное лечение .
Услуги нарколога на дом в Санкт-Петербурге должны быть рассмотрены как одна из возможных вариантов лечения . Это связано с необходимостью постоянной поддержки и консультаций. Услуги нарколога на дом в Санкт-Петербурге становятся все более популярными и востребованными .
Для срочного оформления апостиль на дипломе об образовании рекомендуется обращаться в специализированные компании, предлагающие услуги по узакониванию и переводу документов для дальнейшего использования за рубежом.
как можно быстрее. Это связано с тем, что апостиль подтверждает подлинность документов и их юридическую силу вeyes иностранных властей. Процесс получения апостиля может быть достаточно трудоёмким , но на самом деле он достаточно прост .
Апостиль документов срочно требуется для открытия бизнеса в иностранных странах. Без него документы не будут иметь юридической силы. Следовательно, важно в кратчайшие сроки получить апостиль на все необходимые документы.
Процесс получения апостиля документов срочно начинается с сбора всех необходимых бумаг . Необходимо точно установить , какие документы требуют апостиля для конкретного случая. Затем необходимо оформить все необходимые документы в соответствии с нормативными актами .
После подготовки документов необходимо направить запрос в специализированный орган, где будет обработан запрос . Этот процесс может иметь определённый срок рассмотрения , но в ситуации, требующей оперативности можно активно действовать .
Апостиль для документов срочно означает подтверждение их подлинности вeyes иностранных властей. Это чрезвычайно важно для достижения поставленных целей. Без апостиля документы могут потерять свою ценность , что может привести к серьёзным проблемам .
Следовательно, необходимо уделять особое внимание получению апостиля на все необходимые документы в кратчайшие сроки . Это позволит избежать ненужных осложнений и достичь желаемого результата.
В заключении, апостиль документов срочно означает важнейшее условие для признания документов в иностранных странах. Процесс его получения может иметь свои нюансы, но он достаточно прост , если использовать??ную помощь. Следовательно, важно оперативно получить апостиль на все необходимые документы чтобы сэкономить время .
1xbet yeni giri? adresi 1xbet yeni giri? adresi .
Для многих студентов и аспирантов написать диссертацию цена становится выходом из ситуации, когда необходимо сдать научную работу в короткие сроки.
Диссертация на заказ — это современное решение для студентов, которые хотят получить высокую оценку без лишних хлопот. Это связано с тем, что многие студенты сталкиваются с проблемой нехватки времени для написания диссертации, поскольку они должны совмещать учебу с работой. Кроме того, Диссертация на заказ может быть написана на любую тему, в зависимости от потребностей студента. Это связано с тем, что компании, которые предлагают диссертацию на заказ, используют только лучшие материалы и источники. Кроме того, диссертация на заказ может быть отредактирована и исправлена, если необходимо.
Диссертация на заказ имеет много преимуществ, включая экономию времени и сил. Это связано с тем, что диссертация на заказ может быть заказана на любую тему, в зависимости от потребностей студента. Кроме того, Диссертация на заказ дает studentам возможность получить качественную работу, которая соответствует их потребностям. Это связано с тем, что компании, которые предлагают диссертацию на заказ, используют только лучшие материалы и источники. Кроме того, диссертация на заказ может быть оплачена различными способами, что делает ее доступной для всех.
Процесс заказа диссертации на заказ является простым и удобным, что делает его доступным для всех студентов. Это связано с тем, что компании, которые предлагают диссертацию на заказ, используют только лучшие материалы и источники. Кроме того, Диссертация на заказ дает studentам возможность получить качественную работу, которая соответствует их потребностям. Это связано с тем, что компании, которые предлагают диссертацию на заказ, имеют опытных писателей, которые могут справиться с любой темой. Кроме того, диссертация на заказ может быть оплачена различными способами, что делает ее доступной для всех.
Диссертация на заказ является хорошим решением для студентов, которые хотят получить высокую оценку без значительных усилий. Это связано с тем, что компании, которые предлагают диссертацию на заказ, имеют опытных писателей, которые могут справиться с любой темой. Кроме того, диссертация на заказ может быть отредактирована и исправлена, если необходимо. Это связано с тем, что диссертация на заказ может быть заказана на любую тему, в зависимости от потребностей студента. Кроме того, диссертация на заказ может быть отредактирована и исправлена, если необходимо.
Для всех, кто нуждается в высококачественных услугах по переводу текстов на различные языки, перевод на корейский бюро переводов предлагает профессиональные услуги по переводу различных документов и текстов на широкий спектр языков, включая английский, китайский, испанский, итальянский, французский, немецкий и многие другие, с возможностью нотариального заверения и апостиля.
Бюро переводов является важнейшим компонентом современного бизнеса, обеспечивающим эффективную коммуникацию между компаниями и клиентами из разных стран . Это позволяет им расширять свою клиентскую базу и увеличивать прибыль. Бюро переводов предоставляет широкий спектр услуг, включая перевод документов, интерпретацию, локализацию сайтов и многое другое . Это включает в себя как технические, так и художественные тексты.
Бюро переводов работает с квалифицированными переводчиками, имеющими обширный опыт в различных областях . Они тщательно отбираются и проходят многоэтапную проверку. Переводчики бюро переводов используют современные инструменты и технологии для обеспечения высокой точности и качества перевода . Это включает в себя программы для автоматизированного перевода и редактирования текстов.
Бюро переводов обеспечивает высокую точность и качество перевода, что является важным для бизнеса и частных лиц . Это достигается за счет тщательного отбора переводчиков и использования современных технологий. Бюро переводов предоставляет конкурентоспособные цены и индивидуальные предложения для каждого клиента . Это позволяет клиентам экономить средства и получать качественные услуги.
Бюро переводов позволяет компаниям расширять свою деятельность за пределы национальных границ, предоставляя услуги перевода и интерпретации . Это особенно важно для компаний, которые работают в нескольких странах. Бюро переводов гарантирует конфиденциальность и безопасность данных, используя современные системы защиты . Это достигается за счет использования современных систем защиты данных.
Бюро переводов предоставляет комплексные решения для перевода и интерпретации, удовлетворяя потребности различных отраслей и клиентов . Это позволяет удовлетворять запросыы клиентов из различных секторов. Бюро переводов применяет инновационные методы и инструменты для повышения эффективности и качества услуг . Это включает в себя программы для автоматизированного перевода и редактирования текстов.
Бюро переводов обеспечивает персонализированный подход к каждому клиенту, учитывая его специфику и требования. Это позволяет предоставлять услуги высокого качества. Бюро переводов предлагает специализированные услуги перевода и интерпретации для разных секторов экономики . Это включает в себя как технические, так и художественные тексты.
Бюро переводов играет ключевую роль в глобализации бизнеса, обеспечивая эффективную коммуникацию между компаниями и клиентами . Это позволяет им расширять свою клиентскую базу и увеличивать прибыль. Бюро переводов предлагает высококачественные услуги перевода и интерпретации, используя современные технологии и профессиональных переводчиков . Это включает в себя перевод документов, веб-сайтов и программного обеспечения.
Бюро переводов является ответственным партнером для бизнеса и частных лиц, обеспечивая конфиденциальность и безопасность переводимой информации . Это особенно важно для многих клиентов. Бюро переводов продолжает развиваться и совершенствоваться, предлагая новые услуги и решения для клиентов . Это позволяет удовлетворять растущие требования клиентов.
1xbet giri? g?ncel 1xbet giri? g?ncel .
изготовление кухни на заказ в спб http://www.kuhni-spb-2.ru .
медтехника http://www.medicinskaya-tehnika.ru .
поставщик медицинского оборудования [url=medoborudovanie-postavka.ru]поставщик медицинского оборудования[/url] .
one x bet one x bet .
наркологическая клиника https://narkologicheskaya-klinika-23.ru/ .
медицинское оборудование медицинское оборудование .
наркология в москве http://narkologicheskaya-klinika-24.ru .
психолог нарколог в москве http://www.narkologicheskaya-klinika-25.ru .
Create your own create notary stamp online.
A notary stamp is a crucial instrument in the field of legal documentation. These stamps offer legitimacy and validation to significant documents. In recent years, the demand for notary stamp generators has skyrocketed.
With a notary stamp generator, you can easily produce your own unique stamps. They usually provide users with numerous design options and styles. Such adaptability guarantees that each notary can produce a stamp that represents their professional persona.
Nonetheless, exercising caution while using these generators is essential. Creating a stamp that meets legal standards is vital. Not adhering to these standards may result in significant repercussions.
In conclusion, the notary stamp generator is a valuable tool for professionals. By utilizing these generators, notaries can enhance their efficiency and productivity. Opting for an efficient notary stamp generator can greatly enhance your professional experience.
To create a special atmosphere at your wedding, you can order custom-made wedding rubber stamp, which can be used for cards and invitations.
Wedding stamps are an essential part of the wedding stationery. They can be used on invitations, thank-you cards, and other wedding-related correspondence The wedding stamps can add a touch of elegance to the wedding invitations . Wedding stamps come in a variety of designs and styles The wedding stamps can be designed to match the wedding colors.
Wedding stamps are not just limited to traditional designs The wedding stamps can be designed with a vintage theme . They can also be used to convey a special message or theme The wedding stamps can be used to express the couple’s personality. Wedding stamps are a great way to make the wedding stationery stand out The wedding stamps can be designed to match the wedding style.
There are many different types of wedding stamps available The wedding stamps can be customized with the couple’s names and wedding date . Some popular types of wedding stamps include personalized stamps The personalized stamps can be designed to match the wedding colors. Other types of wedding stamps include photo stamps The photo stamps can be designed to match the wedding theme .
Wedding stamps can also be designed to match the wedding theme The wedding stamps can be used to create a cohesive and stylish wedding stationery. Some couples may choose to use custom wedding stamps The custom wedding stamps can be designed to match the wedding theme . Wedding stamps are a great way to add a personal touch to the wedding stationery The wedding stamps can add a touch of elegance to the wedding invitations .
Wedding stamps can be used in a variety of ways The wedding stamps can be used on wedding invitations . They can be used to add a personal touch to the wedding stationery The wedding stamps can add a touch of elegance to the wedding invitations . Wedding stamps can also be used to convey a special message or theme The wedding stamps can be used to express the couple’s personality.
Wedding stamps can be used on a variety of wedding stationery The wedding stamps can be used on wedding invitations . They can be used to create a cohesive and stylish wedding stationery The wedding stamps can be designed to match the wedding style. Wedding stamps are a great way to make the wedding stationery stand out The wedding stamps can add a personal touch to the wedding stationery .
In conclusion, wedding stamps are a unique and personal way to commemorate a special day The wedding stamps are a great way to make the wedding invitation stand out . They can be used on invitations, thank-you cards, and other wedding-related correspondence The wedding stamps can add a touch of elegance to the wedding invitations . Wedding stamps come in a variety of designs and styles Wedding stamps can be customized with the couple’s names and wedding date .
Wedding stamps are a great way to add a personal touch to the wedding stationery The wedding stamps can be used to create a unique and memorable wedding invitation . They can also be used to convey a special message or theme The wedding stamps can be used to convey a message of love and commitment . Wedding stamps are a unique and thoughtful way to commemorate a special day The wedding stamps can be customized to match the theme of the wedding .
торкретирование стен цена за м2 http://www.torkretirovanie-1.ru/ .
stereo radio alarm clock https://alarm-radio-clocks.com .
оптимизация и seo продвижение сайтов москва оптимизация и seo продвижение сайтов москва .
продвижение сайта продвижение сайта .
hgh kaufen amazon
References:
king-wifi.win
hgh kaufen ohne rezept
References:
287wed.anidub.buzz
локальное seo блог http://statyi-o-marketinge7.ru/ .
seo онлайн seo онлайн .
If you need quality stamp maker online
for your business or personal needs, you can easily find it on the Internet and order it online.
The rubber stamp maker available online is a fantastic resource for individuals and businesses alike. This online platform provides a wide range of design options and templates to choose from The online rubber stamp maker features a vast library of customizable templates and designs . With the rubber stamp maker online, users can create custom stamps with their names, logos, or messages Users can create personalized stamps with their names, logos, or messages .
The rubber stamp maker online is user-friendly and requires no prior design experience The platform is intuitive and allows users to create custom stamps without any technical knowledge . Users can simply upload their design or select a template and customize it to their liking The online platform allows users to select a template and personalize it with their own text or images . The rubber stamp maker online is a cost-effective solution for creating custom rubber stamps The platform offers an affordable solution for creating personalized stamps .
Using a rubber stamp maker online offers several benefits, including convenience and flexibility The online rubber stamp maker provides convenience and flexibility . Users can access the platform from anywhere with an internet connection The online rubber stamp maker can be accessed from anywhere, at any time . The rubber stamp maker online also eliminates the need for physical visits to a stamp maker Using the rubber stamp maker online saves time and effort .
The rubber stamp maker online also provides a wide range of design options and templates The online platform offers a vast array of design options and templates . Users can create custom stamps with different shapes, sizes, and colors The online platform allows users to design custom stamps with different shapes, sizes, and colors . The rubber stamp maker online is also an eco-friendly solution, as it reduces the need for physical materials Using the rubber stamp maker online reduces waste and minimizes the carbon footprint .
Using a rubber stamp maker online is a straightforward process that requires a few simple steps The online rubber stamp maker is easy to use and requires a few simple steps . First, users need to select a design or template from the platform’s library The website provides a range of designs and templates for users to select from. Next, users can customize their design by adding text, images, or logos The online platform allows users to customize their design with text, images, or logos .
Once the design is complete, users can preview and edit their stamp The online rubber stamp maker allows users to preview and edit their stamp . Finally, users can order their custom stamp and receive it in the mail The rubber stamp maker enables users to purchase their custom stamp and receive it at their doorstep. The rubber stamp maker online also provides customer support and assistance The online rubber stamp maker provides customer support and assistance .
In conclusion, the rubber stamp maker online is a convenient and cost-effective solution for creating custom rubber stamps The online rubber stamp maker is a convenient and affordable solution for producing custom rubber stamps . The rubber stamp maker online offers a wide range of design options and templates, making it suitable for individuals and businesses The website provides an extensive collection of designs and templates for users to choose from. We recommend using a rubber stamp maker online for all your custom stamp needs The website is a recommended resource for users looking to create custom stamps.
The rubber stamp maker online is a reliable and efficient solution that provides high-quality custom stamps The platform is a trustworthy and effective way to create personalized stamps . Users can create custom stamps with their names, logos, or messages, and receive them in the mail The online rubber stamp maker allows users to design custom stamps with their own text or images and have them delivered . Overall, the rubber stamp maker online is a great resource for anyone looking to create custom rubber stamps The platform is a valuable tool for individuals and businesses looking to create personalized stamps .
[url=https://best-moscow-photographers.ru/]красивые локации для съемок в москве[/url] предлагают высококачественные услуги для создания незабываемых фотографий.
в ее различных проявлениях . Лучшие фотографы Москвы знают, как использовать свет и тень, чтобы создать по-настоящему уникальные изображения . Фотография — это не просто хобби или профессия, это способ рассказать историю, которая может быть понятна всем.
Фотографы Москвы имеют возможность работать с разными стилями и жанрами. Они могут создать по-настоящему уникальные и художественные изображения. Лучшие фотографы Москвы знают, как работать с светом и тенью .
Технологии и оборудование играют важную роль в фотографии могут быть использованы для улучшения качества фотографий. Лучшие фотографы Москвы могут ch?nать лучшее оборудование для своих целей . Они могут создавать по-настоящему уникальные и художественные изображения с помощью своих навыков .
Фотографы Москвы могут выбрать лучшее оборудование для своих нужд . Они имеют глубокое понимание того, как работает оборудование и технологии. Лучшие фотографы Москвы могут экспериментировать с разными техниками и стилями .
Художественный аспект фотографии очень важен для создания по-настоящему уникальных и художественных изображений . Лучшие фотографы Москвы знают, как использовать художественный аспект фотографии . Они могут использовать различные техники, чтобы создать интересные эффекты .
Фотографы Москвы могут использовать различные программы и приложения для редактирования фотографий . Они могут использовать различные техники, чтобы добиться желаемого эффекта . Лучшие фотографы Москвы знают, как использовать художественный аспект фотографии, чтобы создать по-настоящему уникальные и художественные изображения .
В заключении фотография — это способ выразить себя и свои мысли . Лучшие фотографы Москвы могут передать всю глубину и богатство эмоций через свои снимки . Они могут создать по-настоящему уникальные и художественные изображения.
Фотография — это способ выразить себя и свои мысли. Лучшие фотографы Москвы знают, как работать с светом и тенью . Они имеют возможность работать с различными форматами и размерами изображений.
курсы по seo курсы по seo .
карниз электроприводом штор купить elektrokarniz797.ru .
автоматические жалюзи автоматические жалюзи .
стоимость онлайн трансляции на мероприятии http://zakazat-onlayn-translyaciyu4.ru .
заказать трансляцию конференции http://zakazat-onlayn-translyaciyu5.ru/ .
seo agency nj seo agency nj .
seo top seo top .
birxbet giri? 1xbet-giris-2.com .
Для жителей и организаций столицы доступно множество вариантов по клининг служба москва, что делает возможным подобрать наиболее подходящий для любых целей и потребностей.
В Москве услуги клининга находят все большее количество поклонников. Это связано с тем, что уборка домов и квартир отнимает у москвичей слишком много времени. в результате чего они предпочитают нанять профессионалов .
в последнее время на рынке появилось множество новых клининг-сервисов. Это связано с растущим спросом на такие услуги . Сегодня в Москве можно найти множество компаний .
в Москве можно найти широкий спектр услуг по уборке . это может быть уборка офисов. можно найти услуги по уборке после ремонта или после праздников. Такие услуги как уборка после ремонта или уборка витрин .
на территории столицы также можно найти компании, предоставляющие услуги по уборке улиц . могут включать в себя уход за газонами. в настоящее время на рынке можно найти компании, предлагающие полный комплекс услуг по уборке.
преимущества использования услуг по уборке в столице неоспоримы . Одним из главных преимуществ является экономия времени . Также услуги клининга могут помочь улучшить качество жизни . кроме того, профессионалы могут обеспечить более качественную уборку .
в Москве многие фирмы используют новейшее оборудование . Также они применяют эффективные методы уборки . это позволяет им добиться более лучших результатов .
В заключении можно сказать, что услуги клининга в Москве очень популярны . это объясняется тем, что компании обеспечивают высокое качество уборки . Сегодня в Москве можно найти множество компаний .
Если вы ищете качественные услуги по уборке , то лучше всего нанять профессионалов . они смогут обеспечить вам качественные услуги.
рейтинг агентств по seo рейтинг агентств по seo .
согласование перепланировки в нежилом помещении https://pereplanirovka-nezhilogo-pomeshcheniya16.ru/ .
согласование перепланировок нежилых помещений https://pereplanirovka-nezhilogo-pomeshcheniya18.ru/ .
ооо смартвэй http://sajt-smart-way.ru/ .
аренда экскаватора москва и московская arenda-ekskavatora-pogruzchika-2.ru .
производство мужской одежды санкт петербург arbuztech.ru .
стационар наркологический https://narkologicheskaya-klinika-23.ru/ .
торкретирование торкретирование .
сырость в подвале сырость в подвале .
отделка подвала отделка подвала .
наркологические клиники москва http://www.narkologicheskaya-klinika-23.ru .
1xbet t?rkiye 1xbet t?rkiye .
наркологическое отделение наркологии https://www.narkologicheskaya-klinika-27.ru .
карниз для штор электрический карниз для штор электрический .
ремонт подвала ремонт подвала .
1xbwt giri? 1xbet-17.com .
наркологическая клиника в москве narkologicheskaya-klinika-23.ru .
гидроизоляция подвала гидроизоляция подвала .
подвал дома ремонт https://gidroizolyaciya-podvala-cena.ru .
торкретирование цена за м2 http://torkretirovanie-1.ru/ .
автоматические карнизы для штор автоматические карнизы для штор .
электрические карнизы для штор в москве https://www.elektrokarniz-kupit.ru .
карниз электро http://elektrokarniz-kupit.ru .
birxbet giri? http://1xbet-giris-2.com/ .
1xbet giris 1xbet giris .
медицинская техника медицинская техника .
медицинская техника медицинская техника .
рулонные шторы с электроприводом цена рулонные шторы с электроприводом цена .
1xbet lite http://www.1xbet-giris-8.com .
1 xbet giri? https://www.1xbet-giris-2.com .
one x bet http://1xbet-giris-4.com/ .
1x lite 1x lite .
1xbet mobi https://1xbet-giris-2.com/ .
автоматические шторы на окна автоматические шторы на окна .
продвижение в google https://optimizaciya-i-seo-prodvizhenie-sajtov-moskva-1.ru/ .
блог про seo блог про seo .
производство одежды санкт петербург http://www.arbuztech.ru .
жалюзи с мотором жалюзи с мотором .
смарт вэй http://www.sajt-smart-way.ru .
рейтинг лучших seo агентств https://reiting-seo-kompanii.ru/ .
продвижение сайтов сео топ продвижение сайтов сео топ .
раскрутка сайта франция optimizaciya-i-seo-prodvizhenie-sajtov-moskva-1.ru .
интернет маркетинг статьи интернет маркетинг статьи .
жалюзи с электроприводом купить жалюзи с электроприводом купить .
seo продвижение сайта агентство seo продвижение сайта агентство .
продвижение сайта продвижение сайта .
компании занимающиеся продвижением сайтов компании занимающиеся продвижением сайтов .
заказать перепланировку http://www.soglasovanie-pereplanirovki-1.ru .
surwin https://www.surewin-online.com .
icebet casino erfahrungen icebet casino erfahrungen .
jp99 beauty jp99-online.com .
топ сео компаний топ сео компаний .
site:gooddays045.com site:gooddays045.com .
goliath casino online casino http://www.goliath-casino.com/ .
safe Indian generics for US patients: doctor recommended Indian pharmacy — buy medicines
safe medications from Mexico: Mexico to USA pharmacy shipping — trusted Mexican drugstores online
узаконить перепланировку квартиры стоимость узаконить перепланировку квартиры стоимость .
mexican pharmacy: Dr Meds Advisor — doctor recommended Mexican pharmacy
mostbets http://mostbet12038.ru
услуги по согласованию перепланировки квартиры http://soglasovanie-pereplanirovki-1.ru .
1xbet ?ye ol http://1xbet-7.com .
surewin casino wallet surewin-online.com .
good day for play casino good day for play casino .
сколько стоит согласование перепланировки квартиры в москве http://www.skolko-stoit-uzakonit-pereplanirovku.ru .
canadian pharmacies compare: Doctor North Rx — canadian pharmacy online
ice bet casino ice bet casino .
сколько стоит узаконить перепланировку в москве сколько стоит узаконить перепланировку в москве .
site:gooddays045.com site:gooddays045.com .
1xbet turkiye https://1xbet-7.com/ .
india online pharmacy: medicine online india — indian pharmacy
перепланировка помещений перепланировка помещений .
sure win casino https://surewin-online.com/ .
beeb beeb casino https://beepbeepcasino-online.com/ .
Stromectol over the counter: ivermectin horse paste for scabies — Stromectol over the counter
PrednexaMed: prednisone pill prices — prednisone price
ganabet casino iniciar sesion https://www.ganabet-online.com .
amoxicillin buy no prescription Amoxicillin 500mg buy online amoxil online
prednisone price: Prednexa Med — 1250 mg prednisone
good day 4 play no deposit bonus good day 4 play no deposit bonus .
buy ivermectin online: StromectaDirect — Ivermectin tablets for humans
mostbet kg https://mostbet12040.ru
newsky88 login newsky-online.com .
1xbet g?ncel giri? 1xbet g?ncel giri? .
заказать перепланировку soglasovanie-pereplanirovki-1.ru .
beep beep casino promo codes https://beepbeepcasino-online.com/ .
slot sure win http://www.surewin-online.com .
buy amoxil: Amoxicillin 500mg buy online — can we buy amoxcillin 500mg on ebay without prescription
Stromectol tablets: Ivermectin tablets for humans — Ivermectin tablets for humans
amoxicillin 500 mg cost cheap amoxil where can i buy amoxicillin over the counter
PrednexaMed: PrednexaMed — PrednexaMed
cheap amoxil amoxicillin 500 mg online Navikara Pharmacy
buy prednisone: prednisone price — buy generic prednisone online
PrednexaMed: buy prednisone — Prednexa Med
buy prednisone: Prednexa Med — prednisone price
1 xbet giri? 1xbet-14.com .
heap o wins casino heap o wins casino .
918kiss ios 918kiss ios .
icebet casino login icebet casino login .
goliath casino app http://www.goliath-casino.com .
безрамное остекление беседки https://telegra.ph/Prevratite-vashu-terrasu-v-lyubimuyu-komnatu-Polnoe-rukovodstvo-po-ostekleniyu-ot-SK-Grani-10-21/ .
душевые перегородки на заказ http://www.dzen.ru/a/aPfJd1pLPXEE534U/ .
проект перепланировки квартиры в москве проект перепланировки квартиры в москве .
https://indiavameds.com/# IndiavaMeds
india pharmacy: online medicine — IndiavaMeds
Indiava Meds: IndiavaMeds — india pharmacy
Ivermectin tablets for humans Ivermectin tablets for humans Ivermectin tablets for humans
кухни на заказ спб https://kuhni-spb-9.ru/ .
кухни на заказ санкт петербург http://www.kuhni-spb-10.ru .
безрамное остекление беседки http://www.telegra.ph/Prevratite-vashu-terrasu-v-lyubimuyu-komnatu-Polnoe-rukovodstvo-po-ostekleniyu-ot-SK-Grani-10-21 .
Stromectol over the counter: StromectaDirect — buy ivermectin online
угловая душевая перегородка из стекла https://dzen.ru/a/aPfJd1pLPXEE534U .
школа seo http://www.kursy-seo-12.ru .
seo агентство москва http://reiting-seo-kompanii.ru/ .
goliathcasino http://www.goliath-casino.com/ .
online medicine: Indiava Meds — IndiavaMeds
устный перевод +по скайпу teletype.in/@alexd78/D1bRUvZKB7G .
buy prednisone: buy prednisone — buy prednisone
amoxicillin no prescription: Navikara Pharmacy — amoxicillin 500mg capsule buy online
prednisone price: prednisone price — buy prednisone
bahis sitesi 1xbet bahis sitesi 1xbet .
goliath casino http://www.goliath-casino.com/ .
icebet icebet .
best pharmacy buy Stromectol Stromectol over the counter Stromectol tablets
устный перевод услуги teletype.in/@alexd78/D1bRUvZKB7G .
юридический переводчик стоимость юридический переводчик стоимость .
Stromectol buy cheap: ivermectin for lice in humans — Stromectol over the counter
1win скачать kg https://1win12019.ru/
amoxil online: Navikara Pharmacy — Navikara Pharmacy
Синхронный перевод в бюро Перевод и Право dzen.ru/a/aRDuRn3LkCngCegS .