DS18B20, пожалуй, один из самых из известных и доступных датчиков температуры. В основном для чтения данных с DS18B20 используется микроконтроллеры, к примеру: ATmega8, ATtiny2313, Arduino и др.. С появлением одноплатных мини-компьютеров стало интересно, как будет работать подключённый датчик температуры DS18B20 к Orange Pi, Banana Pi или Raspberry Pi — самые популярнуе мини-компьютеры.
Для работы с GPIO на Orange Pi и Banana Pi необходимо установить WiringOP и BPI-WiringPi соответственно, и IDE Code::Blocks.
При создании статьи был выбран Banana Pi M3, так как он у меня постоянно включён. Но данный пример программы будет работать и при подключении DS18B20 к Orange Pi или Raspberry Pi.
OneWire библиотека
OneWire.h
#ifndef ONEWIRE_H
#define ONEWIRE_H
#define CMD_CONVERTTEMP 0x44
#define CMD_RSCRATCHPAD 0xbe
#define CMD_WSCRATCHPAD 0x4e
#define CMD_CPYSCRATCHPAD 0x48
#define CMD_RECEEPROM 0xb8
#define CMD_RPWRSUPPLY 0xb4
#define CMD_SEARCHROM 0xf0
#define CMD_READROM 0x33
#define CMD_MATCHROM 0x55
#define CMD_SKIPROM 0xcc
#define CMD_ALARMSEARCH 0xec
#include <stdint.h>
class OneWire {
private:
int pin;
uint64_t searchNextAddress(uint64_t, int&);
public:
OneWire(int);
virtual ~OneWire();
int reset(void);
int crcCheck(uint64_t, uint8_t);
uint8_t crc8(uint8_t*, uint8_t);
void oneWireInit();
void writeBit(uint8_t);
void writeByte(uint8_t);
void setDevice(uint64_t);
void searchRom(uint64_t*, int&);
void skipRom(void);
uint8_t readByte(void);
uint8_t readBit(void);
uint64_t readRoom(void);
};
#endif // ONEWIRE_H
OneWire.cpp
#include "OneWire.h"
#include <wiringPi.h>
#include <stdexcept>
#include <iostream>
OneWire::OneWire(int _pin) :
pin(_pin) {
}
OneWire::~OneWire() {
}
void OneWire::oneWireInit() {
if (wiringPiSetup() == -1) {
throw std::logic_error("WiringPi Setup error");
}
pinMode(pin, INPUT);
}
/*
* сброс
*/
int OneWire::reset() {
int response;
pinMode(pin, OUTPUT);
digitalWrite(pin, LOW);
delayMicroseconds(480);
// Когда ONE WIRE устройство обнаруживает положительный перепад, он ждет от 15us до 60us
pinMode(pin, INPUT);
delayMicroseconds(60);
// и затем передает импульс присутствия, перемещая шину в логический «0» на длительность от 60us до 240us.
response = digitalRead(pin);
delayMicroseconds(410);
// если 0, значит есть ответ от датчика, если 1 - нет
return response;
}
/*
* отправить один бит
*/
void OneWire::writeBit(uint8_t bit) {
if (bit & 1) {
// логический «0» на 10us
pinMode(pin, OUTPUT);
digitalWrite(pin, LOW);
delayMicroseconds(10);
pinMode(pin, INPUT);
delayMicroseconds(55);
} else {
// логический «0» на 65us
pinMode(pin, OUTPUT);
digitalWrite(pin, LOW);
delayMicroseconds(65);
pinMode(pin, INPUT);
delayMicroseconds(5);
}
}
/*
* отправить один байт
*/
void OneWire::writeByte(uint8_t byte) {
uint8_t i = 8;
while (i--) {
writeBit(byte & 1);
byte >>= 1;
}
}
/*
* получить один байт
*/
uint8_t OneWire::readByte() {
uint8_t i = 8, byte = 0;
while (i--) {
byte >>= 1;
byte |= (readBit() << 7);
}
return byte;
}
/*
* получить один бит
*/
uint8_t OneWire::readBit(void) {
uint8_t bit = 0;
// логический «0» на 3us
pinMode(pin, OUTPUT);
digitalWrite(pin, LOW);
delayMicroseconds(3);
// освободить линию и ждать 10us
pinMode(pin, INPUT);
delayMicroseconds(10);
// прочитать значение
bit = digitalRead(pin);
// ждать 45us и вернуть значение
delayMicroseconds(45);
return bit;
}
/*
* читать ROM подчиненного устройства (код 64 бита)
*/
uint64_t OneWire::readRoom(void) {
uint64_t oneWireDevice;
if (reset() == 0) {
writeByte (CMD_READROM);
// код семейства
oneWireDevice = readByte();
// серийный номер
oneWireDevice |= (uint16_t) readByte() << 8 | (uint32_t) readByte() << 16 | (uint32_t) readByte() << 24 | (uint64_t) readByte() << 32 | (uint64_t) readByte() << 40
| (uint64_t) readByte() << 48;
// CRC
oneWireDevice |= (uint64_t) readByte() << 56;
} else {
return 1;
}
return oneWireDevice;
}
/*
* Команда соответствия ROM, сопровождаемая последовательностью
* кода ROM на 64 бита позволяет устройству управления шиной
* обращаться к определенному подчиненному устройству на шине.
*/
void OneWire::setDevice(uint64_t rom) {
uint8_t i = 64;
reset();
writeByte (CMD_MATCHROM);
while (i--) {
writeBit(rom & 1);
rom >>= 1;
}
}
/*
* провеска CRC, возвращает "0", если нет ошибок
* и не "0", если есть ошибки
*/
int OneWire::crcCheck(uint64_t data8x8bit, uint8_t len) {
uint8_t dat, crc = 0, fb, stByte = 0;
do {
dat = (uint8_t)(data8x8bit >> (stByte * 8));
// счетчик битов в байте
for (int i = 0; i < 8; i++) {
fb = crc ^ dat;
fb &= 1;
crc >>= 1;
dat >>= 1;
if (fb == 1) {
crc ^= 0x8c; // полином
}
}
stByte++;
} while (stByte < len); // счетчик байтов в массиве
return crc;
}
uint8_t OneWire::crc8(uint8_t addr[], uint8_t len) {
uint8_t crc = 0;
while (len--) {
uint8_t inbyte = *addr++;
for (uint8_t i = 8; i; i--) {
uint8_t mix = (crc ^ inbyte) & 0x01;
crc >>= 1;
if (mix) {
crc ^= 0x8c;
}
inbyte >>= 1;
}
}
return crc;
}
/*
* поиск устройств
*/
void OneWire::searchRom(uint64_t * roms, int & n) {
uint64_t lastAddress = 0;
int lastDiscrepancy = 0;
int err = 0;
int i = 0;
do {
do {
try {
lastAddress = searchNextAddress(lastAddress, lastDiscrepancy);
int crc = crcCheck(lastAddress, 8);
if (crc == 0) {
roms[i++] = lastAddress;
err = 0;
} else {
err++;
}
} catch (std::exception & e) {
std::cout << e.what() << std::endl;
err++;
if (err > 3) {
throw e;
}
}
} while (err != 0);
} while (lastDiscrepancy != 0 && i < n);
n = i;
}
/*
* поиск следующего подключенного устройства
*/
uint64_t OneWire::searchNextAddress(uint64_t lastAddress, int & lastDiscrepancy) {
uint64_t newAddress = 0;
int searchDirection = 0;
int idBitNumber = 1;
int lastZero = 0;
reset();
writeByte (CMD_SEARCHROM);
while (idBitNumber < 65) {
int idBit = readBit();
int cmpIdBit = readBit();
// id_bit = cmp_id_bit = 1
if (idBit == 1 && cmpIdBit == 1) {
throw std::logic_error("error: id_bit = cmp_id_bit = 1");
} else if (idBit == 0 && cmpIdBit == 0) {
// id_bit = cmp_id_bit = 0
if (idBitNumber == lastDiscrepancy) {
searchDirection = 1;
} else if (idBitNumber > lastDiscrepancy) {
searchDirection = 0;
} else {
if ((uint8_t)(lastAddress >> (idBitNumber - 1)) & 1) {
searchDirection = 1;
} else {
searchDirection = 0;
}
}
if (searchDirection == 0) {
lastZero = idBitNumber;
}
} else {
// id_bit != cmp_id_bit
searchDirection = idBit;
}
newAddress |= ((uint64_t) searchDirection) << (idBitNumber - 1);
writeBit(searchDirection);
idBitNumber++;
}
lastDiscrepancy = lastZero;
return newAddress;
}
/*
* пропустить ROM
*/
void OneWire::skipRom() {
reset();
writeByte (CMD_SKIPROM);
}
Подключение нескольких DS18B20 к Orange Pi на одну шину
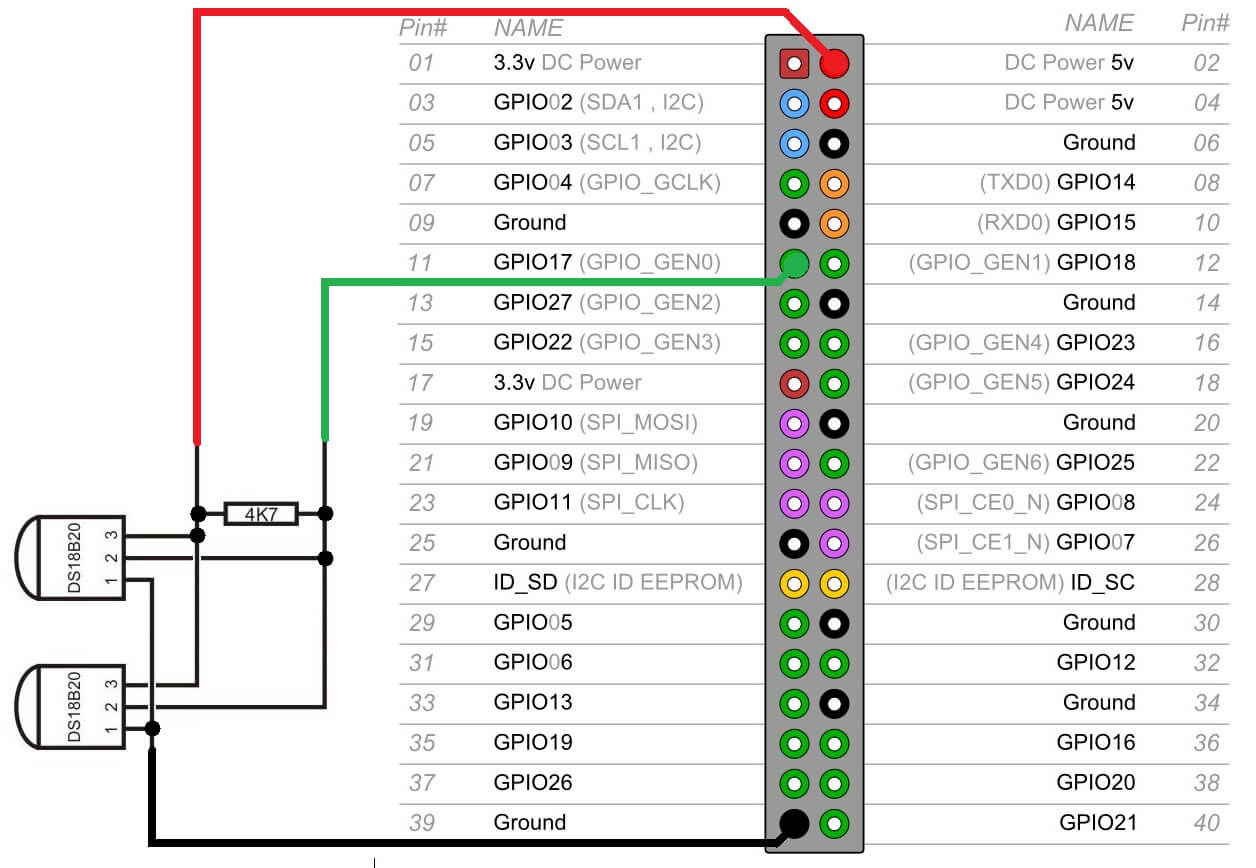
При подключение нескольких датчиков DS18B20 к Orange Pi, Banana Pi или Raspberry Pi на одну шину, главное устройство (компьютер) должно определить коды ROM всех подчиненных устройств на шине. Команда SEARCH ROM [F0h] — (ПОИСК ROM) позволяет устройству управления определять номера и типы подчиненных устройств. Устройство управления изучает коды ROM через процесс устранения, которое требует, чтобы Главное устройство исполнил цикл Поиска ROM (то есть, команда ROM Поиска, сопровождаемая обменом данных). Эту процедуру необходимо выполнить столько раз, сколько необходимо, чтобы идентифицировать все из подчиненных устройств. Если есть только одно подчиненное устройство на шине, более простая команда READ ROM [33h] (Чтения ROM) может использоваться место процесса Поиска ROM.
После каждого цикла Поиска ROM, устройство управления шиной должно возвратиться к Шагу 1 (Инициализация) в операционной последовательности.
main.cpp
#include <iostream>
#include <wiringPi.h>
#include "OneWire.h"
using namespace std;
double getTemp(OneWire * oneWire, uint64_t ds18b20s) {
uint8_t data[9];
do {
oneWire->setDevice(ds18b20s);
oneWire->writeByte(CMD_CONVERTTEMP);
delay(750);
oneWire->setDevice(ds18b20s);
oneWire->writeByte(CMD_RSCRATCHPAD);
for (int i = 0; i < 9; i++) {
data[i] = oneWire->readByte();
}
} while (oneWire->crc8(data, 8) != data[8]);
return ((data[1] << 8) + data[0]) * 0.0625;
}
int main() {
OneWire * ds18b20 = new OneWire(24);
try {
ds18b20->oneWireInit();
double temperature;
int n = 100;
uint64_t roms[n];
ds18b20->searchRom(roms, n);
cout << "---------------------------------" << endl;
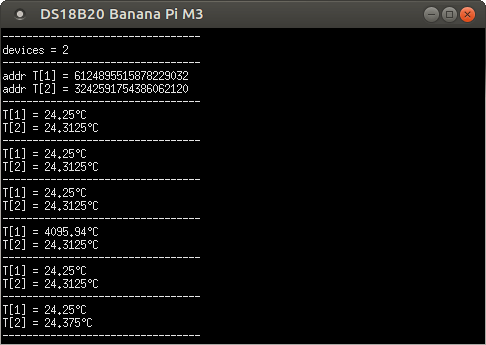
cout << "devices = " << n << endl;
cout << "---------------------------------" << endl;
for (int i = 0; i < n; i++) {
cout << "addr T[" << (i + 1) << "] = " << roms[i] << endl;
}
cout << "---------------------------------" << endl;
while (1) {
for (int i = 0; i < n; i++) {
temperature = getTemp(ds18b20, roms[i]);
cout << "T[" << (i + 1) << "] = " << temperature << "°C" << endl;
}
cout << "---------------------------------" << endl;
delay(500);
}
} catch (exception & e) {
cout << e.what() << endl;
}
}
// site: http://micro-pi.ru
double getTemp(OneWire * oneWire, uint64_t ds18b20s) — возвращает данные температуры в градусах Цельсия.
Результат
Скачать проект Code::blocks
Если есть вопросы, пишите в комментариях, попробуем разобраться.
4095 C ?? ))
Так как это софтовый OneWite, данные иногда отправляются и принимаются с ошибками
Как компилировать скрипт?
Скачать проект «DS18B20 Banana Pi M3.zip», распаковать и открыть в Code::blocks. А для начала нужно его установить, смотрите здесь
Благодарю за статью. Все отлично завелось на OrangePi Zero.
Здравствуйте, я изменил чуть-чуть прошивку, добавил метод
чтобы проверять целостность данных. Также изменил и функцию
Подскажите, пожалуйста, как скомпилировать скрипт на OrangePi Zero ? Машины с Ubuntu/XServer нет 🙁
Пробую так:
root@orangepizero:~/sensor# sudo g++ OneWire.cpp -o OneWire -lwiringPi -lpthread
Выдает:
/usr/lib/gcc/arm-linux-gnueabihf/4.9/../../../arm-linux-gnueabihf/crt1.o: In function `_start’:
(.text+0x28): undefined reference to `main’
collect2: error: ld returned 1 exit status
При компиляции main.cpp жалуется на отсутствие OneWire.
Если вы хотите сделать это вручную, вы можете скомпилировать все ваши
.cppфайлы в объектные файлы:и связывать все объектные файлы:
-cозначает «скомпилировать, не связывать», и вы получите файлыname.o.Или перечислите все остальные файлы
.cppпослеmain.cpp.где
main.outи есть программаСпасибо за оперативный ответ. Компиляция прошла без ошибок. Появился файл main.out. Если я правильно понял, то это исполняемый бинарник.
Выполнил chmod +x ./main.out. Запускаю.
Выдает в цикле ошибку:
[digitalRead:L2123] the pin:-1 is invalid, please check it over!
[getAlt:L1572] the pin:-1 mode: 0 is invaild,please check it over!
Что может быть?
Датчики подключены 2 шт, как указано на схеме. Только GND взят с 25 контакта, вместо 39-го, т.к. у меня OrangePI-Zero, и на CON3 всего 26 контактов.
Я так понимаю вам нужно задать другой пин здесь вместо 24-го;
к примеру 1, 4, 5 или 11.
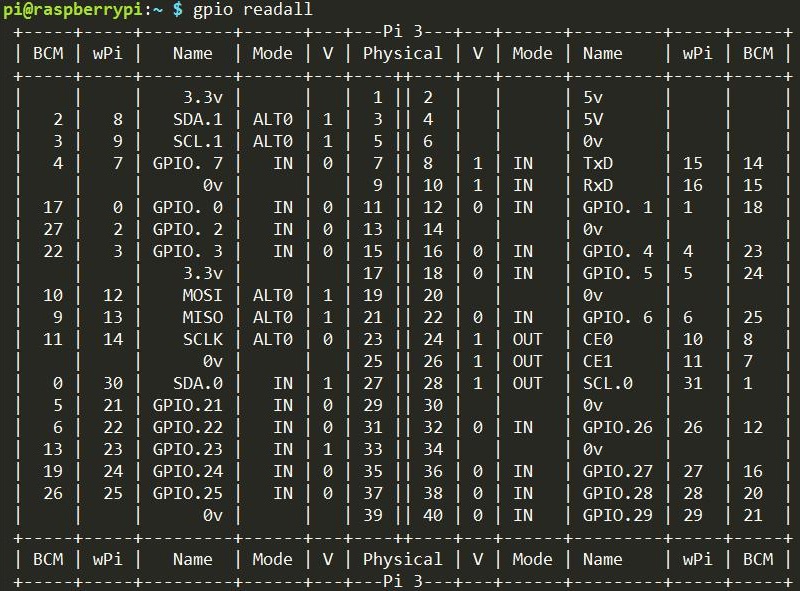
выполните команду
gpio readall, чтобы понять что это за пины:Вы оказались правы. Именно в этом параметре была загвоздка.
Кто будет подключать Orange PI Zero, на заметку:
11-у пину соответствует значение wPi — 0.
С этим значением программа скомпилировалась, но не запустилась, выдав:
error: id_bit = cmp_id_bit = 1.
То, что диод на этом порту моргал отлично, только сбивает с толку.
У меня заработало так: сигнальный провод датчика на 26-й пин,
строка кода в main.cpp: OneWire * ds18b20 = new OneWire(11);
После этого, я получил температуру с датчика.
Спасибо вам, добрый админ!
Добавка к предыдущему посту (Open Pi Zero):
По предложенной на сайте схеме, когда провод данных подключается к 11-му пину, строчка в программе в main.cpp: OneWire * ds18b20 = new OneWire(0);
программа запускается, и видит датчики. Но иногда (довольно часто) не запускается с выше указанной ошибкой. Что меня и смутило в первый раз. Иногда видит только один датчик. Показания температуры могут улетать в зону 4000 градусов, а могут колебаться в пределах +- 10 градусов на соседних измерениях. При том, что среда так не меняется.
В любом случае, спасибо хозяину этого замечательного места! С вашей помощью датчики завелись. Буду добиваться от них надежной работы. Хочу климатику на них регулировать.
Лучше всего использовать пины wPi GPIO.* (GPIO.1, GPIO.4, GPIO.5, GPIO.7 и GPIO.11 — это физические 12, 16, 18, 7 и 26 соответственно), так как они общего назначения, т.е. их можно использовать как обычные цифровые пины входа и выхода. Все остальные пины — это порты IIC (I2C), SPI и UART.
Так что для Orange Pi Zero следующие конфигурации самые оптимальные:
И ещё, если надумаете использовать на долгое время датчик, тогда нужно запитать от 3.3 В, чтобы не убить GPIO от 5 В. У меня вроде не сгорел, но лучше подстраховаться.
Спасибо огромное автору за эти исходники и вообще за этот бесценный ресурс! Ничего подобного больше нигде найти не смог.
У меня на RPi 3 чтение датчиков завелось со значением пина 7.
Однако запускается не каждый раз. При запуске вначале выдает от нуля до пяти одинаковых ошибок:
error: id_bit = cmp_id_bit = 1
Если ошибок три и менее, то дальше начинается нормальное цикличное вычитывание данных температуры. Если ошибок четыре или пять, то после этого выдает std::exception и дальше не работает. От запуска к запуску число ошибок рандомно. Это вообще чего за ошибки и как с ними бороться? У меня 3 датчика подключено сейчас.
Лучше всего использовать пины wPi GPIO.* (GPIO.1, GPIO.4, GPIO.5, GPIO.6, GPIO.26, GPIO.27, GPIO.28, GPIO.29 и др — это физические 12, 16, 18, 22, 32, 36, 38, 40 и тд. соответственно), так как они общего назначения, т.е. их можно использовать как обычные цифровые пины входа и выхода. Все остальные пины — это порты IIC (I2C), SPI и UART.
Если я не ошибаюсь, пин 7 зарезервирован под One Wire
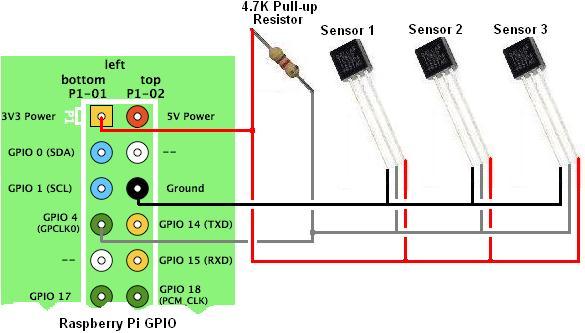
вот пример использования http://www.avislab.com/blog/raspberry-pi-ds18b20_ru/
у меня есть подобная статья, только для Orange Pi с Armbian, что почти то же самое
https://micro-pi.ru/%d1%81%d1%87%d0%b8%d1%82%d1%8b%d0%b2%d0%b0%d0%bd%d0%b8%d0%b5-%d1%82%d0%b5%d0%bc%d0%bf%d0%b5%d1%80%d0%b0%d1%82%d1%83%d1%80%d1%8b-ds18b20-orange-pi/
Так для Raspberry Pi 3 Model B следующие конфигурации самые оптимальные:
И ещё, если надумаете использовать на долгое время датчик, тогда нужно запитать от 3.3 В, чтобы не убить GPIO от 5 В.
Не помогло.
Я до того, как нашёл эту статью, подключал датчики к встроенному в Raspbian интерфейсу 1-Wire посредством встроенного же драйвера. Всё работало, но мне нужна немного иная логика работы с датчиками, для чего нужно было бы переписать драйвер, чего я делать не умею. Потом я нашёл вашу статью, но не учёл, что тут интерфейс 1-Wire реализован полностью автономно и драйвер не используется. Поэтому оставил датчики подключенными к 7-му пину, который действительно в RPi зарезервирован под 1-Wire. Однако это резервирование не жёсткое и через GUI Raspbian встроенный 1-Wire можно отключить. Я отключил, но ошибки не пропали. После этого я переключил датчики на 40-й физический пин, который в wPi имеет номер 29, но ошибки и в этот раз не пропали. Всё выглядит по-прежнему так же. Ка быть?
Пробовал и другие пины, например 32(26) — то же самое.
Тогда откройте файл OneWire.cpp и отредактируйте эту функцию:
void OneWire::searchRom(uint64_t * roms, int & n) { uint64_t lastAddress = 0; int lastDiscrepancy = 0; int err = 0; int i = 0; do { do { try { lastAddress = searchNextAddress(lastAddress, lastDiscrepancy); int crc = crcCheck(lastAddress, 8); if (crc == 0) { roms[i++] = lastAddress; err = 0; } else { err++; } } catch (std::exception & e) { std::cout < < e.what() << std::endl; err++; if (err > 3) { throw e; } } } while (err != 0); } while (lastDiscrepancy != 0 && i < n); n = i; }увеличивая число допустимых ошибок, к примеру 10:
if (err > 10) { throw e; }чем больше подключённых датчиков, тем вероятнее появление этой ошибки, я тестировал с двумя датчиками и было достаточно 3-х попыток
Так как это софтовый OneWite, данные иногда отправляются и принимаются с ошибками, особенно если процессор нагружен, т.е. проблема в delayMicroseconds
Да, это, естественно, помогло, спасибо. Ошибок бывает по 8 штук вылетает. А в чём суть этой ошибки? Вижу, что возникает она в момент поиска адресов устройств на шине. Заметил, что иногда при запуске у меня находятся не 3, а 2 датчика. Попробовал добавить небольшую задержку delay(100); после writeByte (CMD_SEARCHROM); и число ошибок резко сократилось. Датчики медленные или в чём дело может быть? Эту ошибку реально пофиксить, в чём её природа?
Хотя я планирую в своём проекте забить адреса датчиков в конфиг вручную, и функция поиска устройств на шине не потребуется. Но всё равно интересно, почему эти ошибки возникают.
Самая большая проблема в том, что из ОС невозможно получить идеальные задержки с помощью функции
delayMicroseconds(), особенно очень маленькие. Чтобы минимизировать число ошибок нужно задать процессу самый большой приоритет, что не очень хорошо.Ошибки появляются во время поиска, так как 64 раза по 2 раза вызывается функция
readBit()writeByte (CMD_SEARCHROM); while (idBitNumber < 65) { int idBit = readBit(); int cmpIdBit = readBit(); //...а в
readBit()уже 3 раза вызываетсяdelayMicroseconds().Попробуйте изменить
readBit()увеличивая последнюю задержку с 45 до 53, именно это значение используется в Arduino и в даташите. Я указал 45, так как с 53 у меня вообще не работало.было:
uint8_t OneWire::readBit(void) { uint8_t bit = 0; // логический «0» на 3us pinMode(pin, OUTPUT); digitalWrite(pin, LOW); delayMicroseconds(3); // освободить линию и ждать 10us pinMode(pin, INPUT); delayMicroseconds(10); // прочитать значение bit = digitalRead(pin); // ждать 45us и вернуть значение delayMicroseconds(45); return bit; }стало:
uint8_t OneWire::readBit(void) { uint8_t bit = 0; // логический «0» на 3us pinMode(pin, OUTPUT); digitalWrite(pin, LOW); delayMicroseconds(3); // освободить линию и ждать 10us pinMode(pin, INPUT); delayMicroseconds(10); // прочитать значение bit = digitalRead(pin); // ждать 53us и вернуть значение delayMicroseconds(53); return bit; }Почему с задержкой delay(100); после writeByte (CMD_SEARCHROM); стало лучше работать - не знаю, по даташиту её вообще не должно быть.
Попробуйте уменьшить/увеличить значение всех задержек функции
uint8_t OneWire::readBit(void)на +- 1-3мкрсСпасибо, суть проблемы понял. Подёргал все задержки, да, зависимость есть, но добиться безошибочной работы не удаётся.
А встроенный драйвер разве сам не софтово реализует 1-Wire? При его использовании ошибок нет. Вот тут я исходники нашёл, но плохо их понимаю https://elixir.bootlin.com/linux/latest/source/drivers/w1/masters/w1-gpio.c
Обрати внимание здесь https://elixir.bootlin.com/linux/latest/source/drivers/w1/w1_io.c
тут используется udelay(), как я понял — это именно то, что нам нужно
static void w1_delay(unsigned long tm) { udelay(tm * w1_delay_parm); }и ещё, тут есть очень важная деталь, а именно local_irq_save(flags); и local_irq_restore(flags); эти функции отключает/восстанавливает прерывания на время чтения и внешние процессы не мешают https://www.kernel.org/doc/htmldocs/kernel-hacking/routines-local-irqs.html
так что можешь изучить эти функции и сделать почти также, и я постараюсь исправить в ближайшее время
static u8 w1_read_bit(struct w1_master *dev) { int result; unsigned long flags = 0; /* sample timing is critical here */ local_irq_save(flags); dev->bus_master->write_bit(dev->bus_master->data, 0); w1_delay(6); dev->bus_master->write_bit(dev->bus_master->data, 1); w1_delay(9); result = dev->bus_master->read_bit(dev->bus_master->data); local_irq_restore(flags); w1_delay(55); return result & 0x1; }и
static void w1_write_bit(struct w1_master *dev, int bit) { unsigned long flags = 0; if(w1_disable_irqs) local_irq_save(flags); if (bit) { dev->bus_master->write_bit(dev->bus_master->data, 0); w1_delay(6); dev->bus_master->write_bit(dev->bus_master->data, 1); w1_delay(64); } else { dev->bus_master->write_bit(dev->bus_master->data, 0); w1_delay(60); dev->bus_master->write_bit(dev->bus_master->data, 1); w1_delay(10); } if(w1_disable_irqs) local_irq_restore(flags); }Да, спасибо. Задержка там как-то хитро реализована, на цикле каком-то чтоле… С прерываниями тоже нюанс важный, да. Надо это всё изучать.
Творчески переработал ваш код в драйвер ядра.
https://github.com/sergey-sh/opi18b20
Использую в проекте мониторинга температуры, считываю с 3х датчиков с периодичностью 20сек. Особой нагрузки на процессор нет. Бывает при первом чтении для первого датчика выдает 85000, потом все нормально.
Sergey-sh! Один вопрос — как правильно настроить параметр KERNEL_TREE. Судя по всему, он привязан к Вашему конкретному компьютеру. Расскажите об этом параметре новичку чуть поподробнее. Как корректно скомпилировать Ваш драйвер на Rasperry PI.
Алексей! KERNEL_TREE можно попробовать заблокировать #, в этом случае должен использоваться ваши исходники Linux, которые можно скачать sudo apt-get install linux-source. Кроме этого этот драйвер для Orange PI (тестировался на Orange PI One), это другой одноплатник. На уровне портов GPIO он не совместим с Orange PI One. Увы у меня нет Rasperry PI, чтобы можно было попробовать адаптировать драйвер и для него. Необходимо в зависимости от платы менять GPIO_BASE, возможно немного по другому дергать GPIO. Сожалею, что не помог вам.
Добрый день!
Подскажите, а как эти данные в файл писать?
ка бы на экране они мне сильно не нужны, нужен файл с датой и значением.