nRF24L01 один из самых популярных беспроводных модулей для интернета вещей (IoT). Подключение модуля nRF24L01+ к Arduino позволит организовать многоканальную защищенную связь между Arduino и устройствами на расстоянии. Рассмотрим, как наладить связь между двумя или несколько плат Ардуино по радиоканалу.
- 1 Установка библиотеки RF24
- 2 Описание методов библиотеки RF24
- 2.1 begin()
- 2.2 startListening()
- 2.3 stopListening()
- 2.4 available()
- 2.5 isAckPayloadAvailable()
- 2.6 read()
- 2.7 write()
- 2.8 writeAckPayload()
- 2.9 openWritingPipe()
- 2.10 openReadingPipe()
- 2.11 closeReadingPipe()
- 2.12 setChannel()
- 2.13 getChannel()
- 2.14 setDataRate()
- 2.15 getDataRate()
- 2.16 setPALevel()
- 2.17 getPALevel()
- 2.18 setCRCLength()
- 2.19 getCRCLength()
- 2.20 disableCRC()
- 2.21 setPayloadSize()
- 2.22 getPayloadSize()
- 2.23 getDynamicPayloadSize()
- 2.24 enableDynamicPayloads()
- 2.25 enableDynamicAck()
- 2.26 enableAckPayload()
- 2.27 setAutoAck()
- 2.28 setAddressWidth()
- 2.29 setRetries()
- 2.30 powerDown()
- 2.31 powerUp()
- 2.32 isPVariant()
- 2.33 writeFast()
- 2.34 writeBlocking()
- 2.35 startFastWrite()
- 2.36 startWrite()
- 2.37 txStandBy()
- 2.38 rxFifoFull()
- 2.39 flush_tx()
- 2.40 reUseTX()
- 2.41 testCarrier()
- 2.42 testRPD()
- 2.43 isValid()
- 3 Схема подключения nRF24L01+ к Arduino
- 4 Примеры
- 5 Материалы
- 6 Похожие записи
Установка библиотеки RF24
Работать с nRF24L01+ можно с помощью библиотеки RF24 — довольно популярная и удобная библиотека. Скачиваем, распаковываем и закидываем библиотеку RF24 в папку Arduino/libraries. В случае, если на момент добавления библиотеки, Arduino IDE была открытой, перезагружаем среду.
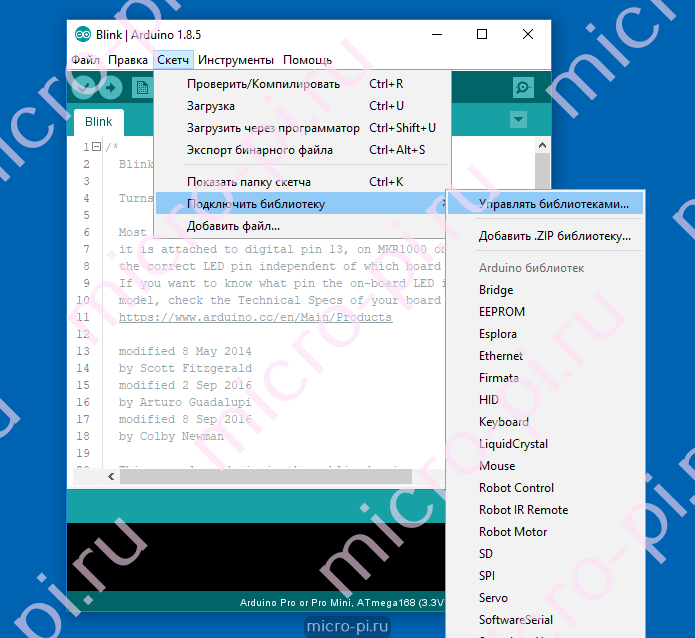
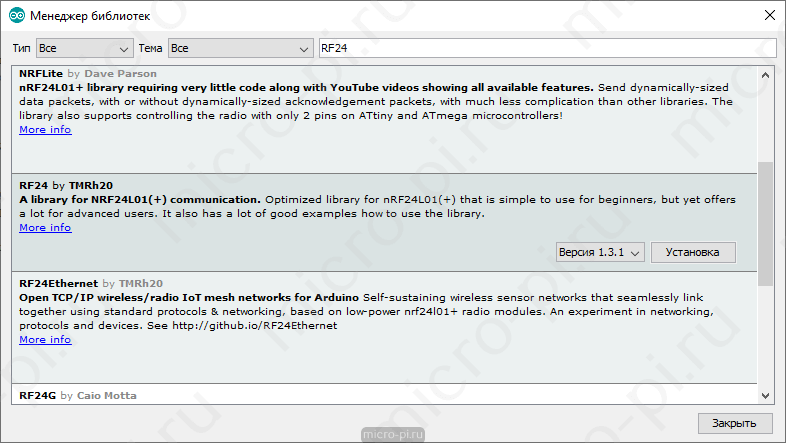
Библиотеку можно установить из самой среды следующим образом:
- В Arduino IDE открываем менеджер библиотек: Скетч->Подключить библиотеку->Управлять библиотеками…
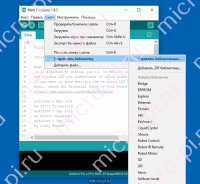
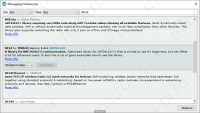
- В строке поиска вводим «RF24», находим библиотеку автора TMRh20, выбираем последнюю версию и кликаем Установить.
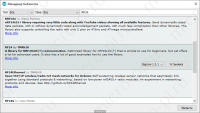
- Библиотека установлена (INSTALLED).

Описание методов библиотеки RF24
begin()
Инициализация работы модуля.
bool RF24::begin(void);
Возвращает
bool — результат инициализации (true / false).
startListening()
Начать прослушивание труб, открытых для приёма данных.
void RF24::startListening(void);
stopListening()
Прекратить прослушивание труб и переключиться в режим передатчика.
void RF24::stopListening(void);
available()
Проверить наличие принятых данных доступных для чтения.
bool RF24::available(void); bool RF24::available(uint8_t * pipe_num);
Параметры
pipe_num — адрес переменной типа uint8_t в которую требуется поместить номер трубы по которой были приняты данные.
Возвращает
bool — флаг наличия принятых данных (true / false).
isAckPayloadAvailable()
Проверить передатчиком наличие данных в ответе приёмника.
bool RF24::isAckPayloadAvailable(void);
Возвращает
bool — флаг наличия принятых данных от приёмника (true / false).
read()
Прочитать принятые данные.
void RF24::read(void * buf, uint8_t len);
Параметры
buf — адрес массива, строки или переменной в которую требуется поместить принятые данные.
len — количество байт занимаемое массивом, строкой или переменной в которую требуется поместить принятые данные.
write()
Отправить данные по радиоканалу.
bool RF24::write(const void * buf, uint8_t len, const bool multicast);
Параметры
buf — Данные, адрес массива, строки или переменной, данные которой требуется отправить.
len — Размер отправляемых данных в байтах.
multicast — Флаг групповой передачи, установите в true если требуется отправить данные нескольким приёмникам.
Возвращает
bool — результат доставки данных приёмнику (true / false).
writeAckPayload()
Подготовить данные для ответа передатчику.
void RF24::writeAckPayload(uint8_t pipe, const void * buf, uint8_t len);
Параметры
pipe — Номер трубы передатчика которому требуется ответить данными.
buf — Данные, адрес массива, строки или переменной, данные которой требуется отправить вместе с ответом передатчику.
len — Размер отправляемых данных в байтах.
openWritingPipe()
Открыть трубу для передачи данных.
void RF24::openWritingPipe(uint64_t address);
Параметры
address — Адрес трубы, состоит из 5 байт (по умолчанию) и может быть представлен числом типа uint64_t или массивом из 5 однобайтных элементов. Адрес трубы передатчика должен совпадать с одним из адресов труб приёмника.
openReadingPipe()
Открыть трубу для приёма данных.
void RF24::openReadingPipe(uint8_t number, const uint8_t * address); void RF24::openReadingPipe(uint8_t number, uint64_t address);
Параметры
number — Номер трубы (число от 0 до 5).
address — Адрес трубы, состоит из 5 байт (по умолчанию) и может быть представлен числом типа uint64_t или массивом из 5 однобайтных элементов. Адрес трубы приёмника должен совпадать с адресом трубы передатчика.
closeReadingPipe()
Закрыть трубу открытую ранее для прослушивания (приёма данных).
void RF24::closeReadingPipe(uint8_t pipe):
Параметры
number — Номер трубы (число от 0 до 5), которую более не требуется прослушивать.
setChannel()
Установить радиочастотный канал связи. Номер канала определяет частоту на которой работает модуль. Каждый канал имеет шаг в 1 МГц, а каналу 0 соответствует частота 2,4 ГГц = 2400 МГц, следовательно, каналу 1 соответствует частота 2401 МГц, каналу 2 — частота 2402 МГц и т.д. до канала 125 с частотой 2525 МГц.
void RF24::setChannel(uint8_t channel);
Параметры
channel — Номер канала, указывается числом от 0 до 125.
getChannel()
Получить номер текущего радиочастотного канала связи.
uint8_t RF24::getChannel(void);
Возвращает
Номер канала, число от 0 до 125.
setDataRate()
Установить скорость передачи данных по радиоканалу.
bool RF24::setDataRate(rf24_datarate_e speed);
Параметры
speed — Скорость, задаётся одной из констант: RF24_1MBPS — 1 Мбит/сек, RF24_2MBPS — 2 Мбит/сек и RF24_250KBPS — 250 Кбит/сек (только для модуля NRF24L01+PA+LNA).
Возвращает
Флаг успешной установки новой скорости (true / false).
getDataRate()
Получить текущую скорость передачи данных по радиоканалу.
rf24_datarate_e RF24::getDataRate(void);
Возвращает
значение одной из констант сопоставленной скорости:RF24_1MBPS — 1 Мбит/сек, RF24_2MBPS — 2 Мбит/сек и RF24_250KBPS — 250 Кбит/сек (только для модуля NRF24L01+PA+LNA).
setPALevel()
Установить уровень усиления мощности передатчика.
void RF24::setPALevel(uint8_t level);
Параметры
level — Уровень, задаётся одной из констант:
- RF24_PA_MIN — минимальный уровень усиления = -18 дБм.
- RF24_PA_LOW — низкий уровень усиления = -12 дБм.
- RF24_PA_HIGH — высокий уровень усиления = -6 дБм.
- RF24_PA_MAX — максимальный уровень усиления = 0 дБм.
getPALevel()
Получить текущий уровень усиления мощности передатчика.
uint8_t RF24::getPALevel(void);
Возвращает
значение одной из констант сопоставленной мощности:RF24_PA_MIN — минимальный уровень усиления = -18 дБм.
- RF24_PA_LOW — низкий уровень усиления = -12 дБм.
- RF24_PA_HIGH — высокий уровень усиления = -6 дБм.
- RF24_PA_MAX — максимальный уровень усиления = 0 дБм.
- RF24_PA_ERROR — уровень усиления не определён.
setCRCLength()
Установить размер CRC (циклически избыточный код).
void RF24::setCRCLength(rf24_crclength_e length);
Параметры
length — Размер, задаётся одной из констант: RF24_CRC_8 — под CRC отводится 8 бит (CRC-8) или RF24_CRC_16 — под CRC отводится 16 бит (CRC-16).
getCRCLength()
Получить текущий размер CRC (циклически избыточный код).
rf24_crclength_e RF24::getCRCLength(void);
Возвращает
значение одной из констант сопоставленной размеру CRC: RF24_CRC_8 — под CRC отводится 8 бит (CRC-8), RF24_CRC_16 — под CRC отводится 16 бит (CRC-16) или RF24_CRC_DISABLED — передача и проверка CRC отключены.
disableCRC()
Отключить передачу CRC передатчиком и проверку данных приёмником.
void RF24::disableCRC(void);
setPayloadSize()
Установить статичный размер блока данных пользователя в байтах.
void RF24::setPayloadSize(uint8_t size);
Параметры
size — Размер блока данных пользователя в байтах.
getPayloadSize()
Получить текущий статичный размер блока данных пользователя в байтах.
uint8_t RF24::getPayloadSize(void);
Возвращает
текущий статичный размер блока данных от 0 до 32 байт.
getDynamicPayloadSize()
Получить размер блока данных в последнем принятом пакете.
uint8_t RF24::getDynamicPayloadSize(void);
Возвращает
размер данных последнего принятого пакета в байтах.
enableDynamicPayloads()
Разрешить динамически изменяемый размер блока данных для всех труб.
void RF24::enableDynamicPayloads(void);
enableDynamicAck()
Разрешить отказываться от запроса пакетов подтверждения приёма.
void RF24::enableDynamicAck(void);
enableAckPayload()
Разрешить размещать данные пользователя в пакете подтверждения приёма.
void RF24::enableAckPayload(void);
setAutoAck()
Управление автоматической отправкой пакетов подтверждения приёма данных.
void RF24::setAutoAck(bool enable); void RF24::setAutoAck(uint8_t pipe, bool enable);
Параметры
pipe — номер трубы, для которой разрешается / запрещается автоматическая отправка пакетов подтверждения приема. Указывается только на стороне приёмника. Если номер трубы на стороне приёмника не указан, то действие функции распространяется на все трубы.
enable — Флаг разрешающий автоматическую отправку пакетов подтверждения приёма данных. true — разрешить / false — запретить.
setAddressWidth()
Указать длину адресов труб в байтах.
void RF24::setAddressWidth(uint8_t a_width);
Параметры
a_width — Размер адреса трубы в байтах, представлен числом 3, 4 или 5.
setRetries()
Указать максимальное количество попыток отправки данных и время ожидания.
void RF24::setRetries(uint8_t delay, uint8_t count);
Параметры
delay — целое число от 0 до 15 определяющее время ожидания подтверждения приема.
count — целое число от 1 до 15 определяющее максимальное количество попыток доставить данные передатчику.
powerDown()
Перейти в режим пониженного энергопотребления.
void RF24::powerDown(void);
powerUp()
Выйти из режима пониженного энергопотребления.
void RF24::powerUp(void);
isPVariant()
Проверить аппаратную совместимость модуля с функциями nRF24L01.
bool RF24::isPVariant(void);
Возвращает
(true / false) флаг указывающий на совместимость аппаратного обеспечения модуля с функциями чипа nRF24L01+.
writeFast()
Быстро отправить данные по радиоканалу.
bool RF24::writeFast(const void * buf, uint8_t len); bool RF24::writeFast(const void * buf, uint8_t len, const bool multicast);
Параметры
buf — Данные, адрес массива, строки или переменной, данные которой требуется отправить.
len — Размер отправляемых данных в байтах.
multicast — Флаг групповой передачи, установите в true если требуется отправить данные нескольким приёмникам.
Возвращает
результат записи данных в буфер для передачи (true / false).
writeBlocking()
Быстро отправить данные по радиоканалу с указанием таймаута.
bool RF24::writeBlocking(const void * buf, uint8_t len, uint32_t timeout);
Параметры
buf — Данные, адрес массива, строки или переменной, данные которой требуется отправить.
len — Размер отправляемых данных в байтах.
timeout — Максимальное время ожидания освобождения буфера FIFO в миллисекундах.
Возвращает
результат записи данных в буфер для передачи (true / false).
startFastWrite()
Начать быструю отправку данных.
void RF24::startFastWrite(const void * buf, uint8_t len, const bool multicast, bool startTx = 1);
Параметры
buf — Данные, адрес массива, строки или переменной, данные которой требуется отправить.
len — Размер отправляемых данных в байтах.
multicast — Флаг групповой передачи, установите в true если требуется отправить данные нескольким приёмникам.
startTx — флаг перехода в режим TX или STANDBY-II. Если не указан, значит установлен.
startWrite()
Начать отправку данных.
void RF24::startWrite(const void * buf, uint8_t len, const bool multicast);
Параметры
buf — Данные, адрес массива, строки или переменной, данные которой требуется отправить.
len — Размер отправляемых данных в байтах.
multicast — Флаг групповой передачи, установите в true если требуется отправить данные нескольким приёмникам.
txStandBy()
Подождать пока передаются данные и вернуть результат.
bool RF24::txStandBy(void); bool RF24::txStandBy(uint32_t timeout, bool startTx = 0);
Параметры
timeout — максимальное время ожидания указывается в миллисекундах.
Возвращает
результат передачи данных из буферов FIFO в радиоканал (true / false).
rxFifoFull()
Проверить не заполнены ли все три буфера FIFO.
bool RF24::rxFifoFull(void);
Возвращает
флаг указывающий на то что все буферы FIFO заполнены.
flush_tx()
Очистка буферов FIFO.
uint8_t RF24::flush_tx(void);
reUseTX()
Повторная отправка данных из буфера FIFO, если они там есть.
void RF24::reUseTX(void);
testCarrier()
Проверка наличия несущей частоты на выбранном канале (частоте).
bool RF24::testCarrier(void);
Возвращает
наличие несущей на выбранном канале за все время его прослушивания.
testRPD()
Проверка наличия любого сигнала выше -64 дБм на выбранном канале (частоте).
bool RF24::testRPD(void);
Возвращает
наличие сигнала мощностью выше -64 дБм на выбранном канале за все время его прослушивания.
isValid()
Проверить используется ли модуль или выполняется отладка кода.
bool RF24::isValid(void);
Возвращает
назначение редактируется (true / false).
Схема подключения nRF24L01+ к Arduino
Подключается nRF24L01+ к Arduino по шине SPI (можно использовать как аппаратную так и программную шину). Выводы модуля Vcc и GND подключаются к шине питания 3.3 В постоянного тока. Выводы модуля MISO, MOSI и SCK подключаются к одноименным выводам шины SPI на плате Arduino. Выводы SS (Slave Select) и CE (Chip Enable) назначаются при объявлении объекта библиотеки RF24 и подключаются к любым назначенным выводам Arduino.
Подключить nRF24L01+ к Arduino можно как напрямую, так и через специальный адаптер.
Подключение nRF24L01+ к Arduino напрямую
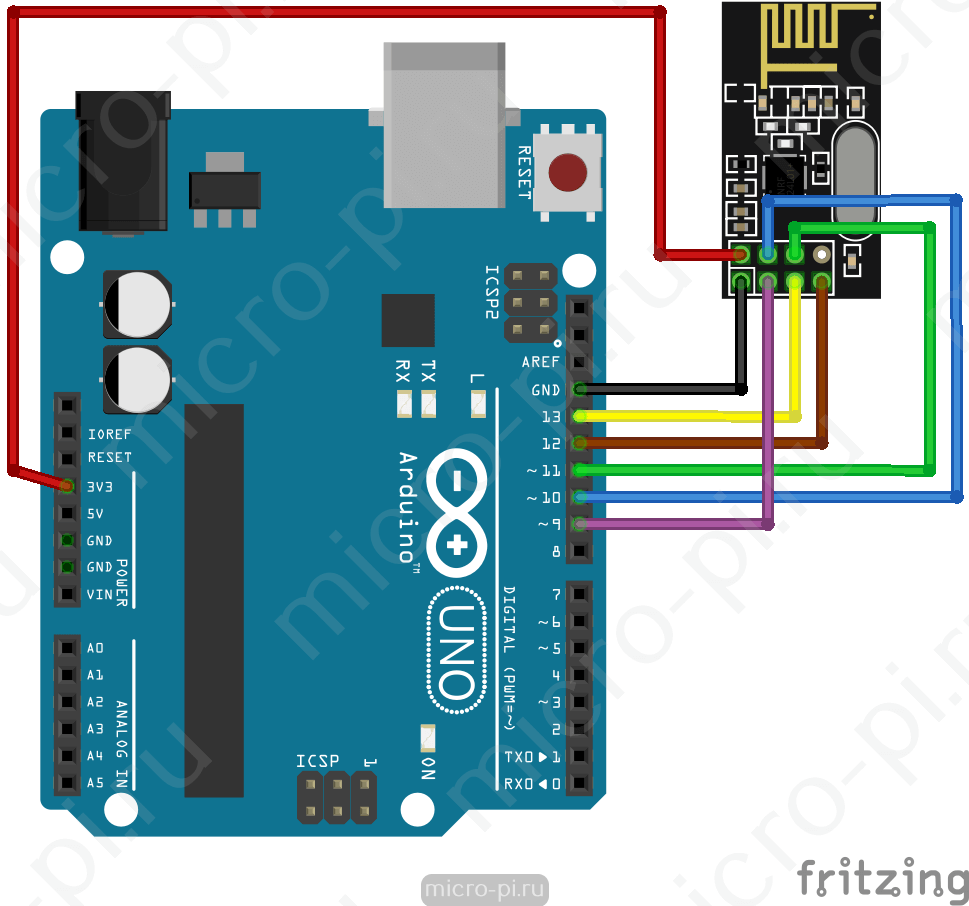
Внимание!
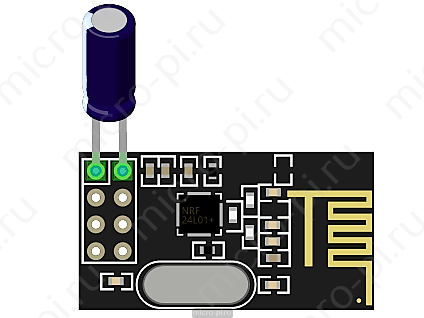
- Необходимо помнить, что модуль работает от 3.3 В и в нем нет защиты от переполюсовки, если не соблюдать два этих правила, можно сжечь модуль!
- Для стабильной работы модуля NRF24L01+ необходимо припаять конденсатор на 10 мкФ между VCC и GND.
| nRF24L01+ | Arduino UNO/Pro Mini | Arduino MEGA2560 |
|---|---|---|
| GND | GND | GND |
| VCC | 3.3V | 3.3V |
| CE | 9 | 9 |
| CSN | 10 | 53 |
| SCK | 13 | 52 |
| MOSI | 11 | 51 |
| MISO | 12 | 50 |
| IRQ | — | — |
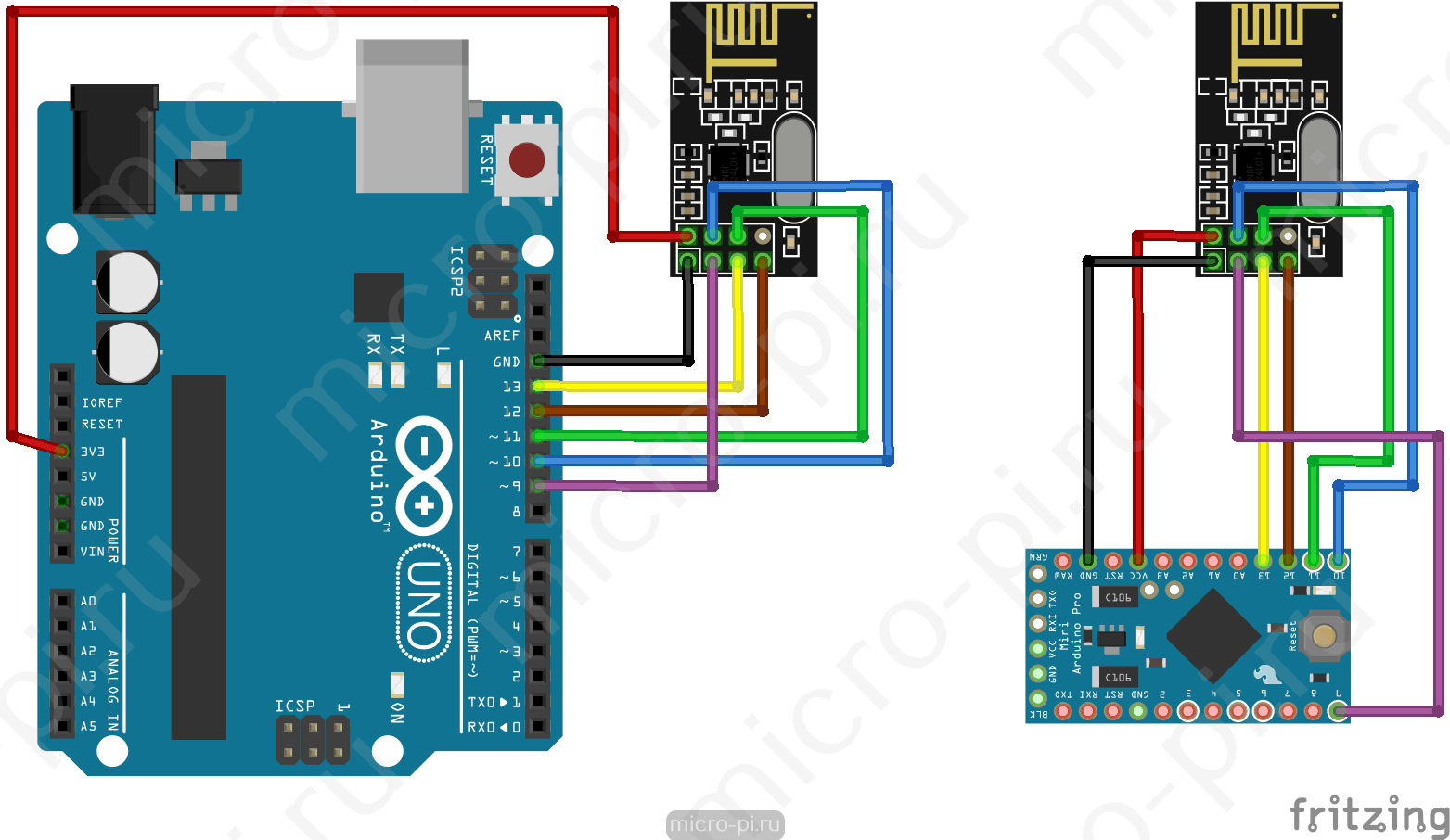
Подключение nRF24L01+ к Arduino через адаптер
| Адаптер nRF24L01+ | Arduino UNO/Pro Mini | Arduino MEGA2560 |
|---|---|---|
| GND | GND | GND |
| VCC | 5.0V | 5.0V |
| CE | 9 | 9 |
| CSN | 10 | 53 |
| SCK | 13 | 52 |
| MO/MOSI | 11 | 51 |
| MI/MISO | 12 | 50 |
| IRQ | — | — |
Примеры
Пример 1: Проверочный скетч
/*
Подключаем файл настроек из библиотеки RF24.
*/
#include <nRF24L01.h>
/*
Подключаем библиотеку для работы с nRF24L01+.
*/
#include <RF24.h>
#include <printf.h>
/*
Создаём объект radio для работы с библиотекой RF24,
указывая номера выводов модуля (CE, SS).
*/
RF24 radio(7, 10);
void setup() {
/*
Инициируем передачу данных по шине UART в монитор
последовательного порта на скорости 115200 бит/сек.
*/
Serial.begin(115200);
printf_begin();
/*
Инициируем работу модуля nRF24L01+.
*/
radio.begin();
if (radio.isPVariant()) {
/*
Если модуль поддерживается библиотекой RF24,
то выводим текст «Модуль nRF24L01 подключен».
*/
Serial.println("Модуль nRF24L01 подключен");
/*
Дамп конфигурации RF для отладки
*/
radio.printDetails();
} else {
/*
Иначе, если модуль не поддерживается,
то выводи текст «Неизвестный модуль».
*/
Serial.println("Неизвестный модуль");
}
}
void loop() {
}
Результат
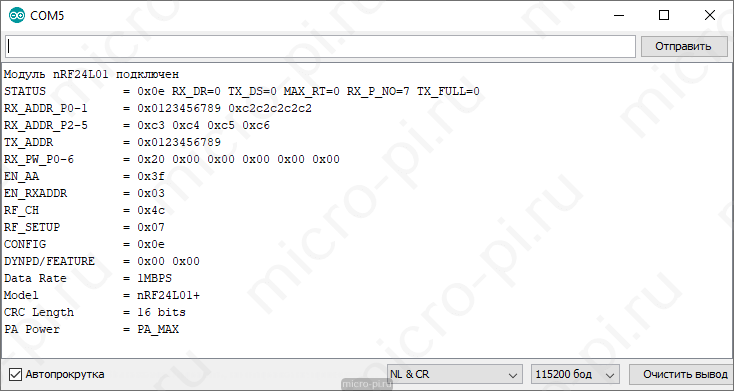
Если после загрузки проверочного скетча увидели, в окне монитора последовательного порта, надпись «Модуль nRF24L01 подключен», значит Ваш модуль поддерживается библиотекой RF24. Если Вы увидели надпись «Неизвестный модуль», проверьте подключение модуля к Arduino. В скетче указано что вывод «CE» (Chip Enable) модуля подключается к выводу 7 Arduino, а вывод SS (Slave Select) модуля подключается к выводу 10 Arduino. При необходимости измените выводы на другие. Если модуль подключён правильно, значит он собран на чипе отличном от nRF24L01.
Пример 2: Передача данных
В функции setup() данного примера модулю задаются основные настройки:
- по умолчанию модуль работает в качестве передатчика;
0x30канал;- скорость 1 Мбит/сек (
RF24_1MBPS); - максимальная мощности (
RF24_PA_MAX); - адрес трубы
0x0123456789LL.
На стороне приёмника нужно указать тот же номер канала, скорость передачи, мощность и адрес трубы.
/*
Подключаем файл настроек из библиотеки RF24
*/
#include <nRF24L01.h>
/*
Подключаем библиотеку для работы с nRF24L01+
*/
#include <RF24.h>
/*
Создаём объект radio для работы с библиотекой RF24,
указывая номера выводов модуля (CE, SS).
*/
RF24 radio(7, 10);
/*
Объявляем массив для хранения и передачи данных
(до 32 байт включительно).
*/
int dataToBeTransmitted[5] = {'0', '1', '2', '3', '4'};
void setup() {
/*
Инициируем работу nRF24L01+
*/
radio.begin();
/*
Указываем канал передачи данных (от 0 до 127)
(на одном канале может быть только 1 приёмник и до 6 передатчиков).
Выбираем канал в котором нет шумов!
*/
radio.setChannel(0x30);
/*
Указываем скорость передачи данных
RF24_250KBPS = 250Кбит/сек
RF24_1MBPS = 1Мбит/сек
RF24_2MBPS = 2Мбит/сек
Скорость должна быть одинакова на приёмнике и передатчике.
При самой низкой скорости имеем самую высокую чувствительность и дальность.
*/
radio.setDataRate(RF24_1MBPS);
/*
Указываем мощность передатчика
RF24_PA_MIN=-18dBm
RF24_PA_LOW=-12dBm
RF24_PA_HIGH=-6dBm
RF24_PA_MAX=0dBm
*/
radio.setPALevel(RF24_PA_MAX);
/*
Открываем трубу с адресом 0x0123456789LL для передачи данных
(передатчик может одновременно вещать только по одной трубе).
*/
radio.openWritingPipe(0x0123456789LL);
}
void loop() {
/*
Отправляем данные из массива dataToBeTransmitted
указывая весь размер массива в байтах.
*/
radio.write(&dataToBeTransmitted, sizeof(dataToBeTransmitted));
/*
Устанавливаем задержку на 1000 мс.
*/
delay(1000);
}
Пример 3: Получение данных от одного передатчика
В коде setup() приёмника задаются такие же настройки как и передатчику (канал, скорость, мощность передатчика).
0x30канал;- скорость 1 Мбит/сек (
RF24_1MBPS); - максимальная мощности (
RF24_PA_MAX); - адрес трубы
0x0123456789LL, для приёма данных.
Чтобы включить прослушивание труб, нужно вызвать startListening(), метод переводит модуль в режим работы приёмника. Если далее вызвать stopListening(), то модуль перейдёт в режим работы передатчика.
/*
Подключаем файл настроек из библиотеки RF24
*/
#include <nRF24L01.h>
/*
Подключаем библиотеку для работы с nRF24L01+
*/
#include <RF24.h>
/*
Создаём объект radio для работы с библиотекой RF24,
указывая номера выводов модуля (CE, SS).
*/
RF24 radio(7, 10);
/*
Объявляем массив для хранения и передачи данных
(до 32 байт включительно).
*/
int receivedData[5];
/*
Объявляем переменную в которую будет сохраняться
номер трубы по которой приняты данные.
*/
uint8_t pipe;
uint8_t i;
void setup() {
/*
Инициируем передачу данных по шине UART в монитор
последовательного порта на скорости 115200 бит/сек.
*/
Serial.begin(115200);
/*
Инициируем работу nRF24L01+
*/
radio.begin();
/*
Указываем канал передачи данных (от 0 до 127)
(на одном канале может быть только 1 приёмник и до 6 передатчиков).
Выбираем канал в котором нет шумов!
*/
radio.setChannel(0x30);
/*
Указываем скорость передачи данных
RF24_250KBPS = 250Кбит/сек
RF24_1MBPS = 1Мбит/сек
RF24_2MBPS = 2Мбит/сек
Скорость должна быть одинакова на приёмнике и передатчике.
При самой низкой скорости имеем самую высокую чувствительность и дальность.
*/
radio.setDataRate(RF24_1MBPS);
/*
Указываем мощность передатчика
RF24_PA_MIN=-18dBm
RF24_PA_LOW=-12dBm
RF24_PA_HIGH=-6dBm
RF24_PA_MAX=0dBm
*/
radio.setPALevel(RF24_PA_MAX);
/*
Открываем 1 трубу с адресом 1 передатчика 0x0123456789LL, для приема данных.
*/
radio.openReadingPipe(1, 0x0123456789LL);
/*
Включаем приемник, начинаем прослушивать открытые трубы.
*/
radio.startListening();
}
void loop() {
/*
Если в буфере имеются принятые данные, то получаем номер трубы
по которой эти данные пришли в переменную pipe.
*/
if (radio.available(&pipe)) {
/*
Читаем данные из буфера в массив receivedData указывая
сколько всего байт может поместиться в массив.
*/
radio.read(&receivedData, sizeof(receivedData));
/*
Если данные пришли от 1 передатчика (по 1 трубе),
то можно выполнить соответствующее действие ...
*/
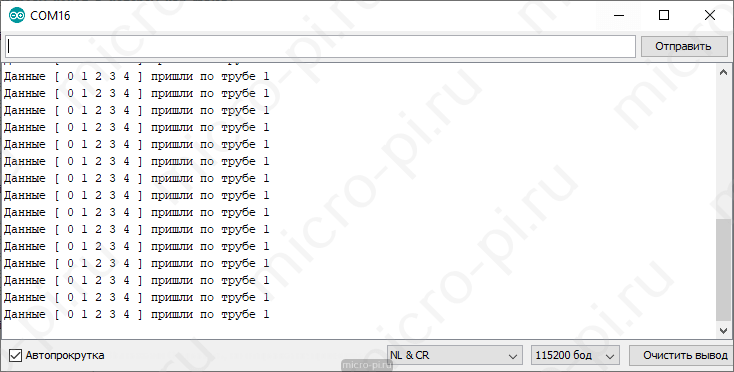
Serial.print("Данные [ ");
for (i = 0; i < 5; i++) {
Serial.print((char) receivedData[i]);
Serial.print(' ');
}
Serial.print("] пришли по трубе ");
Serial.println(pipe);
}
}
Результат
Пример 4: Передача данных с проверкой их доставки
/*
Подключаем файл настроек из библиотеки RF24
*/
#include <nRF24L01.h>
/*
Подключаем библиотеку для работы с nRF24L01+
*/
#include <RF24.h>
/*
Создаём объект radio для работы с библиотекой RF24,
указывая номера выводов модуля (CE, SS).
*/
RF24 radio(7, 10);
/*
Объявляем массив для хранения и передачи данных
(до 32 байт включительно).
*/
uint8_t dataToBeTransmitted[5] = {'0', '1', '2', '3', '4'};
void setup() {
/*
Инициируем передачу данных по шине UART в монитор
последовательного порта на скорости 115200 бит/сек.
*/
Serial.begin(115200);
/*
Инициируем работу nRF24L01+
*/
radio.begin();
/*
Указываем канал передачи данных (от 0 до 127)
(на одном канале может быть только 1 приёмник и до 6 передатчиков).
Выбираем канал в котором нет шумов!
*/
radio.setChannel(0x30);
/*
Указываем скорость передачи данных
RF24_250KBPS = 250Кбит/сек
RF24_1MBPS = 1Мбит/сек
RF24_2MBPS = 2Мбит/сек
Скорость должна быть одинакова на приёмнике и передатчике.
При самой низкой скорости имеем самую высокую чувствительность и дальность.
*/
radio.setDataRate(RF24_1MBPS);
/*
Указываем мощность передатчика
RF24_PA_MIN=-18dBm
RF24_PA_LOW=-12dBm
RF24_PA_HIGH=-6dBm
RF24_PA_MAX=0dBm
*/
radio.setPALevel(RF24_PA_MAX);
/*
Открываем трубу с адресом 0x0123456789LL для передачи данных
(передатчик может одновременно вещать только по одной трубе).
*/
radio.openWritingPipe(0x0123456789LL);
}
void loop() {
/*
Отправляем данные из массива dataToBeTransmitted
указывая весь размер массива в байтах.
*/
if (radio.write(&dataToBeTransmitted, sizeof(dataToBeTransmitted))) {
/*
Данные передатчика были корректно приняты приёмником
*/
Serial.println("Данные были корректно приняты приёмником");
} else {
/*
Данные передатчика не приняты или дошли с ошибкой CRC
*/
Serial.println("Данные не приняты или дошли с ошибкой CRC");
}
/*
Устанавливаем задержку на 1000 мс.
*/
delay(1000);
}
Результат
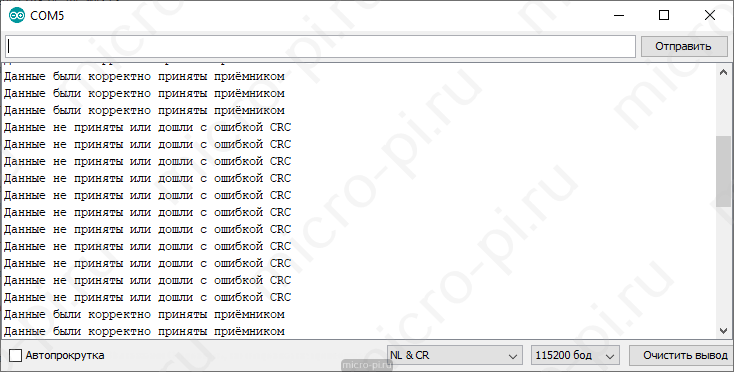 Скетч данного примера отличается от предыдущего только кодом loop() где функция write() вызывается в условии оператора if(). Дело в том, что функция write() не только отправляет данные, но и возвращает true (если данные были доставлены) или false (если данные не доставлены). По умолчанию передача данных реализована так, что передатчик не только отправляет данные, но и запрашивает у приёмника подтверждение их получения, а приёмник получив данные и проверив CRC, возвращает передатчику пакет подтверждения приема данных. Таким образом на стороне передатчика можно контролировать факт доставки данных приёмнику.
Скетч данного примера отличается от предыдущего только кодом loop() где функция write() вызывается в условии оператора if(). Дело в том, что функция write() не только отправляет данные, но и возвращает true (если данные были доставлены) или false (если данные не доставлены). По умолчанию передача данных реализована так, что передатчик не только отправляет данные, но и запрашивает у приёмника подтверждение их получения, а приёмник получив данные и проверив CRC, возвращает передатчику пакет подтверждения приема данных. Таким образом на стороне передатчика можно контролировать факт доставки данных приёмнику.
Если не нужно определить факт доставки данных приёмнику, можете заменить write() на writeFast().
/* Отправляем данные из массива dataToBeTransmitted указывая сколько байт массива мы хотим отправить. */ radio.writeFast(&dataToBeTransmitted, sizeof(dataToBeTransmitted));
writeFast() принимает те же параметры что и write(), но возвращает не флаг доставки данных приёмнику, а флаг записи данных в буфер FIFO. Значит в большинстве случаев функция вернёт true даже до того как приёмник получит данные. Если же все три буфера FIFO заполнены, то функция writeFast() ждёт пока один из них не освободится или пока не истечёт время таймаута но и это ожидание на порядок меньше чем у функции write().
Запретить отправку пакетов подтверждения приёма можно и на стороне приёмников, вызвав у них функцию setAutoAck(false) или setAutoAck(номер_трубы, false). Но в таком случае и на стороне передатчика нужно вызвать функцию setAutoAck(false) иначе приёмник не будет понимать что ему прислал передатчик.
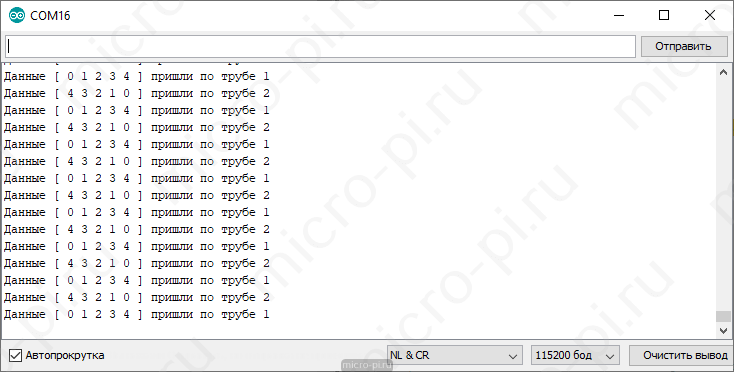
Пример 5: Получение данных от одного или нескольких передатчиков
Приёмнику можно задать до 6 труб функцией openReadingPipe(номер, адрес) с номерами труб от 0 до 5 и адресами труб совпадающими с адресами труб передатчиков.
/*...*/ radio.openReadingPipe(0, 0x0123456789LL); radio.openReadingPipe(1, 0x0123456799LL); radio.openReadingPipe(2, 0x012345679ALL); radio.openReadingPipe(3, 0x01234567AALL); radio.openReadingPipe(4, 0x01234567ABLL); radio.openReadingPipe(5, 0x01234567BBLL); /*...*/
Сколько труб Вы укажете, столько передатчиков будет слушать приёмник.
Методом available() осуществляется проверка получения данных. Метод возвращает true если в буфере есть принятые данные доступные для чтения. В качестве необязательного аргумента можно указать адрес переменной в которую будет помещён номер трубы по которой были приняты данные (в примере используется адрес переменной &pipe), зная номер трубы мы знаем от какого передатчика пришли данные.
if(radio.available(&pipe)) {
/*...*/
}
Если приемник будет принимать данные только от одного передатчика, то переменную pipe можно не использовать, а метод available() можно вызвать без параметра, так как в этом случае не требуется узнавать от какого передатчика приняты данные.
/*
Подключаем файл настроек из библиотеки RF24
*/
#include <nRF24L01.h>
/*
Подключаем библиотеку для работы с nRF24L01+
*/
#include <RF24.h>
/*
Создаём объект radio для работы с библиотекой RF24,
указывая номера выводов модуля (CE, SS).
*/
RF24 radio(7, 10);
/*
Объявляем массив для хранения и передачи данных
(до 32 байт включительно).
*/
uint8_t receivedData[5];
/*
Объявляем переменную в которую будет сохраняться
номер трубы по которой приняты данные.
*/
uint8_t pipe;
uint8_t i;
void setup() {
/*
Инициируем передачу данных по шине UART в монитор
последовательного порта на скорости 115200 бит/сек.
*/
Serial.begin(115200);
/*
Инициируем работу nRF24L01+
*/
radio.begin();
/*
Указываем канал передачи данных (от 0 до 127)
(на одном канале может быть только 1 приёмник и до 6 передатчиков).
Выбираем канал в котором нет шумов!
*/
radio.setChannel(0x30);
/*
Указываем скорость передачи данных
RF24_250KBPS = 250Кбит/сек
RF24_1MBPS = 1Мбит/сек
RF24_2MBPS = 2Мбит/сек
Скорость должна быть одинакова на приёмнике и передатчике.
При самой низкой скорости имеем самую высокую чувствительность и дальность.
*/
radio.setDataRate(RF24_1MBPS);
/*
Указываем мощность передатчика
RF24_PA_MIN=-18dBm
RF24_PA_LOW=-12dBm
RF24_PA_HIGH=-6dBm
RF24_PA_MAX=0dBm
*/
radio.setPALevel(RF24_PA_MAX);
/*
Открываем 1 трубу с адресом 1 передатчика 0x0123456789LL, для приема данных.
*/
radio.openReadingPipe(1, 0x0123456789LL);
/*
Открываем 2 трубу с адресом 2 передатчика 0x0123456799LL, для приема данных.
*/
radio.openReadingPipe(2, 0x0123456799LL);
/*
Включаем приемник, начинаем прослушивать открытые трубы.
*/
radio.startListening();
}
void loop() {
/*
Если в буфере имеются принятые данные, то получаем номер трубы
по которой эти данные пришли в переменную pipe.
*/
if (radio.available(&pipe)) {
/*
Читаем данные из буфера в массив receivedData указывая
сколько всего байт может поместиться в массив.
*/
radio.read(&receivedData, sizeof(receivedData));
/*
Если данные пришли от 1 передатчика (по 1 трубе),
то можно выполнить соответствующее действие ...
*/
Serial.print("Данные [ ");
for (i = 0; i < 5; i++) {
Serial.print((char) receivedData[i]);
Serial.print(' ');
}
Serial.print("] пришли по трубе ");
Serial.println(pipe);
}
}
Результат
Материалы
Радио модуль NRF24L01+ / PA+LNA 2.4G (Trema-модуль V2.0)
Урок 26.4 Соединяем две arduino по радиоканалу через nRF24L01+
Optimized High Speed NRF24L01+ Driver Class Documenation
Спасибо за описание методов. Только здесь нашел.
В примере 4 тип данных для отправки uint8_t, а в примере 3 тип данных для приема int. Несколько неожиданно, когда принимается не совсем то что отправляется. ))
https://t.me/s/Portable_Titanbet
https://t.me/s/TeleCasino_1win/533
https://t.me/s/play_1win_online
вместо RF24 radio(7, 10); должно быть RF24 radio(9, 10);
абсолютно не обязательно, у меня работают 7, 8.
https://t.me/sDragonMoney_Portable
https://t.me/s/TeleCasino_1win/1233
https://t.me/s/play_1win_online
Вовсе не обязательно. Это зависит от того, к каким выводам Ардуино подведены сигналы ce и csn радиомодуля.
https://t.me/s/RatingCasinoRu
https://t.me/s/TeleCasino_1win/493
https://t.me/s/play_1win_online
Спасибо большое! Реально только здесь нашел информацию. Хотелось бы еще увидеть пример с переключением с приема на передачу и обратно.
https://t.me/s/TeleCasino_1win/213
https://t.me/TeleCasino_1Win/5
https://t.me/s/play_1win_online
Всегда интересно было, какая каша в голове у тех, кто схему проводками рисует, цветными. Даже на принципиальной схеме разбирать всё это невозможно. При этом распиновку самого модуля не показали..
Appreciation to my father who informed me regarding this website, this blog
is in fact amazing.
https://boost.en-nitricboost.us
Have you ever thought about writing an ebook or guest authoring
on other websites? I have a blog centered on the same information you discuss and would really like to have you share some stories/information. I know my readers would enjoy
your work. If you are even remotely interested, feel free to send me an e-mail.
My site — the growth matrix xxx
Go88 la cong game doi thuong truc tuyen so 1 Viet Nam hien nay voi hon 2 trieu nguoi choi moi ngay tai trang chu Go88 COM. Go88 cung cap kho game phong phu.
Website: https://go88.run/
Perfectly voiced indeed. .
Thanks a lot, A lot of information.
great issues altogether, you just won a logo new reader.
What would you recommend in regards to your post that you made a few days in the past?
Any sure?
Feel free to surf to my site item648153073
Heya! I’m at work surfing around your blog from my new
apple iphone! Just wanted to say I love reading your blog and look forward
to all your posts! Carry on the fantastic work!
Here is my site :: nervovive reviews and complaints
May I simply just say what a comfort to discover someone who genuinely knows what
they’re discussing on the web. You certainly understand how to bring a
problem to light and make it important. More people
have to read this and understand this side of the story.
It’s surprising you’re not more popular since you definitely have
the gift.
Its like you read my mind! You seem to know so much about this, like you wrote the book in it or something.
I think that you could do with some pics to drive the message home a bit,
but other than that, this is magnificent blog. An excellent read.
I’ll definitely be back.
my page … the growth-share matrix
What’s up it’s me, I am also visiting this website daily, this web site is truly nice and the visitors are in fact sharing
pleasant thoughts.
Feel free to visit my site … tonic greens facebook
Howdy! This post couldn’t be written much better!
Reading through this article reminds me of my previous roommate!
He constantly kept preaching about this. I most certainly will send this article to him.
Pretty sure he will have a very good read. Thanks for sharing!
my homepage … the growth matrix real or fake
Hey! This is my 1st comment here so I just wanted to give a quick shout
out and say I really enjoy reading your articles. Can you recommend any other blogs/websites/forums that
go over the same topics? Thanks for your time!
my blog the growth matrix step by step youtube reddit
A person necessarily assist to make significantly posts I might state.
This is the very first time I frequented your website page and so far?
I amazed with the analysis you made to make this particular
put up extraordinary. Magnificent process!
my blog post the dick growth matrix
Hi, I do think this is a great website. I stumbledupon it 😉 I
may come back yet again since I book-marked it. Money
and freedom is the best way to change, may you be rich and continue to help others.
Take a look at my blog post billionaire brain wave free
Hello, i believe that i saw you visited my blog thus i got here to return the want?.I’m trying to in finding things to improve
my site!I assume its adequate to use some of your concepts!!
My blog renew weight loss
The world of rigorous gaming has undergone a remarkable transformation in recent years, with the rise of esports as a global phenomenon .
Amidst this rapidly developing landscape, one
name has emerged as a trailblazer – Spade Gaming.
Spade Gaming is a might to be reckoned with, a gaming entity that has carved out a unique niche for itself by
blending cutting-edge invention , strategic
outlook , and a unyielding commitment to prowess.
Established with the goal of reimagining the
boundaries of rigorous gaming, Spade Gaming has quickly become a
symbol of ingenuity , driving the landscape forward with its unconventional approach and unyielding dedication.
At the center of Spade Gaming’s success lies its resolute commitment on performer development and crew building.
The company has cultivated an environment that
supports and supports its individuals, providing them with the equipment
, training , and assistance they need to reach
new summits .
But Spade Gaming’s leverage extends far past the confines of the game by itself .
The enterprise has also positioned itself as a trailblazer in the
sphere of reporting creation, harnessing its
comprehensive stockpile of exceptional experts to
manufacture enthralling and gripping coverage that resonates among aficionados covering the planet .
In addition , Spade Gaming’s loyalty to civic obligation and public engagement distinguishes
it distinct from its competitors . The organization has utilized
its megaphone to promote vital campaigns ,
leveraging its significance and standing to foster
a substantial mark in the sphere of esports and encompassing more .
As the competitive gaming industry presses forward to
develop , Spade Gaming looms as a gleaming example of what can be
realized when foresight , freshness, and a
unyielding quest of prowess converge .
In the years to follow , as the realm of competitive
gaming soldiers on to enchant audiences
and redefine the way we immerse with recreation , Spade Gaming will
without a doubt continue at the frontier , directing the crusade and building
a trailblazing age in the perpetually morphing
realm of esports.
Also visit my blog :: online sports betting [https://www.popsugar.com/profile/ownerdoubt2]
Scanner.biz makes scanning documents fast and easy with your smartphone.
Whether it’s contracts, receipts, or notes, you can instantly turn them into
clear PDFs or images. The app automatically enhances brightness and crops to ensure professional-looking results every time.
Forget heavy equipment—Scanner.biz offers everything you need for mobile scanning.
With multi-page support and easy file organization, managing documents on the
go is effortless. Available for Android
and iPhone, Scanner.biz is your perfect tool for fast,
efficient document scanning!
ComFax is the top solution for sending faxes right from your
smartphone, available for both Android and iPhone. In a few
simple steps, you can send important documents in minutes—no need for a fax machine.
Just upload your file, enter the number, and send.
The app focuses on security, using encrypted channels to keep your
data safe. Whether you’re working from home or on the move, ComFax
offers a quick, secure, and convenient way to meet your
faxing needs. Stay efficient and connected with ComFax!
Scanner.biz converts your smartphone into a powerful, portable scanner,
allowing you to scan any paper document into a crisp PDF
or image in seconds. Be it contracts, receipts, or handwritten notes, the app automatically adjusts brightness and cropping for professional results.
No more bulky scanners—Scanner.biz offers fast, efficient scanning right
from your smartphone. It supports multi-page documents and allows easy file organization and sharing.
Compatible with both Android and iPhone, Scanner.biz simplifies document
management wherever you are!
Restaurante Tinajas: O Sabor que Deixou Saudades
O ícone da gastronomia panamenha fechou suas portas, marcando época
na culinária local. Se destacava por suas noites culturais.
https://godfather-789.com/ยเว็บตรงของคนไทย เจ้าพ่อมาเฟียเว็บใหญ่ไม่มีโกง
Hi there, I enjoy reading all of your article.
I like to write a little comment to support you.
Hi there, yup this article is in fact good and I have learned lot
of things from it about blogging. thanks.
Also visit my blog :: testoprim d for sale
I blog quite often and I genuinely appreciate your information. The
article has truly peaked my interest. I am going to bookmark your site
and keep checking for new details about once per week.
I opted in for your Feed too.
My homepage … post33654
It’s impressive that you are getting ideas from this article as well as from our argument made at this time.
can i purchase generic myambutol tablets
I feel this is among the such a lot vital info for me.
And i’m glad studying your article. But wanna observation on few normal things, The site taste
is great, the articles is really nice : D. Good process, cheers
Here is my site — purdentix
Hello, I wish for to subscribe for this website to take hottest updates, therefore where can i do it
please help out.
Feel free to surf to my blog — getsightcare fast
What an thought-provoking and reflective entry !
I have to declare , your analysis of this
pivotal topic was sincerely exceptional .
The depth and complexity you incorporated to the
dialogue was remarkable , casting new light on the subtleties at work .
I found myself affirming as I read through your skillfully composed assertions .
The way you were empowered to extract the essential ideas excepting simplifying was
especially exceptional.
It’s clear you’ve dedicated a substantial amount
of effort into researching this topic .
This entry has presented me a great deal to ponder and has challenged me to reconsider specific components of my own perspective .
I value you investing the resources to disseminate your knowledge — entries like this are exceptionally
priceless in developing the more expansive
discussion .
I anticipate skimming more of your data in the days to
follow. Kindly sustain the superb work !
my site; demo slot microgaming free
Sweet blog! I found it while searching on Yahoo News.
Do you have any tips on how to get listed in Yahoo News?
I’ve been trying for a while but I never seem to get there!
Many thanks
Here is my homepage; plantsulin reviews
how can i get tegretol pill
cost of cheap celebrex without prescription
Attractive section of content. I just stumbled upon your weblog and
in accession capital to assert that I acquire actually enjoyed account your
blog posts. Anyway I will be subscribing to your feeds and even I achievement you access consistently quickly.
Also visit my blog post :: what is prodentim made of
where can i get generic reglan without dr prescription
https://pacman168vip.com/ยกขบวนเกมสล็อตยอดฮิตจากค่ายดังต่างประเทศ
Thank you for sharing your info. I really appreciate your efforts and I am waiting for your next post thank you once again.
Completed Reading a Blog Post: A Formal Feedback to
the Comment Section and an Invitation to Join «KING855»
‘After thoroughly studying the blog post,
I would like to submit the following remarks to the section .
Your insights concerning the theme were
quite intriguing . I found myself in agreement with
several of the points you brought up .
It is gratifying to see such an lively discussion taking place .
If you are curious in further delving into this
topic , I would warmly encourage you to participate in the «KING855»
platform. In that space, you will have the opportunity to
engage with kindred spirit members and delve deeper into these fascinating subjects.
I am confident your contribution would be a meaningful enhancement to the
discussion .
I’m grateful for your remarks, and I look forward to the prospect of continuing
this enlightening dialogue .
Also visit my homepage … free spins
can i get generic maxalt without dr prescription
แพะ ครับ อ่านบล็อกนี้
และรู้สึกตื่นเช้า มาก!
เหตุการณ์ ที่น่าสนใจและ
รายละเอียดในอัน ครบถ้วน ทำให้ผมได้รับความรู้
ใหม่ๆ มากมาย ผมชอบวิธีการ ที่คุณวิเคราะห์ ประเด็นต่างๆ อย่างลึกซึ้ง และแนะนำ แนวคิดที่น่าสนใจ ผมเห็นด้วยในมุมมอง หลายจุดที่คุณกล่าวถึง และมองที่เป็นเรื่องอันที่สำคัญและควรได้รับการพิจารณา อย่างละเอียด
นอกจากนี้ ผมยังชอบ ความทันสมัย ในการนำเสนอ เนื้อหา
ภาษา ที่ใช้เข้าใจง่าย
และการจัดรูปแบบ ที่น่าสนใจ ทำให้ อ่านแล้วรู้สึกสนุก เป็นบล็อกที่โดดเด่น และน่าติดตามอย่างมาก
ขอยกย่อง ที่แบ่งปันข้อมูล และมุมมอง ที่น่าสนใจ ผมรอเฝ้าลุ้น ที่จะอ่านบทความเพิ่มเติม ของคุณในภายหน้า และหวังว่าจะได้มีโอกาส อภิปราย ความคิดเห็น กับคุณเช่นเดียวกัน
my website: จ่ายไว หวยออนไลน์
Phenomenal Blog Entry
Gosh , what an thought-provoking and thought-provoking work !
I came across myself agreeing as I perused through your analysis
of this pivotal matter.
Your points were meticulously studied and communicated in a lucid, persuasive manner.
I specifically appreciated how you were able to distill the essential complexities and subtleties at work
, without simplifying or overlooking the obstacles .
This article has offered me a substantial amount
to reflect on . You’ve definitively expanded my comprehension and transformed
my mindset in specific profound fashions .
Thank you for taking the effort to convey your proficiency on this topic .
Articles like this are extremely a valuable participation to the conversation. I anticipate witnessing what other illuminating material you have in supply.
Here is my blog — ebet slot login
order nexium without a prescription
Salutations, comrade reader. I must commend the author for their insightful and expertly-penned blog
post. The text was both insightful and thought-provoking,
leaving me with a deeper understanding of the subject at hand.
I would desire to extend an proposal to engage with the prestigious PUSSY888 collective.
This environment offers a world of pleasure and stimulation, accommodating
those who appreciate the more discerning things in reality.
I recommend you to delve into the expansive choices and captivate yourself in the enthralling excursions that summon you.
Your membership would be extremely appreciated, and I await with impatience the privilege to converse
with you more thoroughly within this prestigious online environment
my blog :: gambling artificial intelligence
cost of generic dulcolax without a prescription
cost of celebrex pills
can you get cheap celebrex prices
cost generic lamisil without rx
cost generic nexium without insurance
where to get cheap cytotec without insurance
cost of cheap zestril
can i get cheap keflex pill
cost of generic celebrex
My spouse and I stumbled over here different web page and thought I may
as well check things out. I like what I see so now i am following you.
Look forward to finding out about your web page yet again.
my blog :: erec power
can i order cheap celebrex pill
cost of cheap flagyl without dr prescription
how can i get celebrex no prescription
cost cheap nemasole without rx
cost of celebrex no prescription
Hi there, everything is going sound here and ofcourse every one is sharing facts,
that’s truly fine, keep up writing.
Also visit my web-site: phenq order
how to get cheap augmentin without rx
where can i get generic geodon no prescription
can you get lamisil pill
cost of cheap crestor price
cost generic maxolon prices
ลอตเตอรี่ รูปแบบ ยี่กีเป็น ประเภท การ ทำ
หวย อันที่ ได้รับความ ความชื่นชอบ อย่างมากใน ดินแดน ไทย
ซึ่งมี ลักษณะคล้ายคลึง กับ ลอตเตอรี่ ลอตเตอรี่ทั่วไป แต่มีความแตกต่าง ในด้าน
การเลือกสรร ตัวเลขที่
และ ขั้นตอน ในการ จ่ายค่า จัดจำหน่าย
การ ลองเล่น หวยยี่กีนั้น ผู้ ทำการ จะ เลือกออก ตัวเลข จำนวน 2-3 หลัก ซึ่ง อาจทั้งสิ้น เป็น เลขเด็ด ที่มีความหมาย หรือ เลขเด็ด ที่ ปรากฏ ใน ความเชื่อมั่นศรัทธา ของ บุคคล จากนั้น ส่งไป เลขเด็ด เหล่านั้น
ไปจองซื้อ ที่ ตัวแทนจำหน่าย จำหน่าย การพนัน ยี่กี
ซึ่งมัก จะ คล้ายกับ จุดจำหน่าย ปลีก
ทั้งประเทศ ในชุมชน
ปัจจัยที่ ทำให้ ตั๋ว ยี่กี ได้รับการยอมรับ มาก ก็คือ ผลตอบแทน การ ทำรางวัล ในการจ่ายรางวัล ซึ่ง
ส่วนมาก จะ มากกว่า ลอตเตอรี่ รัฐบาล โดย อย่างยิ่ง เมื่อ ตัวเลข ที่ถูกรางวัล เป็น หมายเลขที่ ซึ่ง ไม่ค่อยจะถูก ใน ลอตเตอรี่ รัฐบาล ซึ่งก็ ที่ทำให้ ผู้ พนัน จะได้รับ ผล รางวัลตอบแทน ที่ สูงมาก
หาก หมายเลขที่ ที่ เลือกมา
ถูก
อย่างไร ทีเดียว การ ใช้ การพนัน
ยี่กีนั้นก็ มีความ
ความเสี่ยงอย่างมาก มากเกินไป เนื่องจากเป็น การ พนัน อันที่
อาศัย บุญกรรม ด้วยเป็นหลัก ซึ่งอาจ
ทำให้ผู้ เดิมพัน เสียเงินไป เงินจำนวนมาก ในกรณี ไม่ถูก รางวัล ดังนั้น จึงควร ทดลองเล่น ด้วย ความ
ใส่ใจเป็นพิเศษ
ในภาพรวม ตั๋ว ยี่กีถือเป็น การเล่นพนัน ที่ได้รับ อย่าง มากมายในประเทศ ใน ท้องถิ่น ไทย แม้ว่าจะ
มีความ ความเสี่ยงสูง
มากเกินไป แต่ก็
ก็ยังมี ที่ ปฏิบัติ ความสนใจ และ
ขอเล่น การพนัน ยี่กีอย่างสม่ำเสมอ ทั้ง เพื่าจะ หวัง ผล รางวัลตอบแทน อันใด สูงมาก
และ เพื่าจะ แสวงหา
ความ ความต้องการความตื่นเต้น
จาก การเดิมพัน
my page … สูตรคํานวณหวย
ยี่กี (https://offroadjunk.com)
The given subject matter of this blog article
is extremely captivating . I appreciated the way you scrutinized the diverse issues
so thoroughly and clearly . You enabled me acquire
novel insights that I never previously pondered
before. Thank you for imparting your mastery and skill — it
has equipped me to acquire knowledge more .
I uniquely liked the ground-breaking perspectives
you presented , which expanded my mindset and cognition in significant trajectories .
This blog is systematic and engaging , which is paramount
for subject matter of this level .
I anticipate to peruse further of your work in the
days to come , as I’m convinced it is sure
to continue to be informative and facilitate me persist
in growing . I express my gratitude !
Here is my site … top payment methods for Canadian players (Julienne)
Truly quite a lot of beneficial data!
I have extensively reveled in the perspectives provided
in this reflective blog piece . The scribe has gracefully conveyed
several critical themes that align with me
powerfully .
As an fervent supporter of pioneering corporate
undertakings , I would aim to present an invitation to you to discover the
exceptional chances available at Pragmatic Play .
This dynamic organization is at the apex of technological leaps, furnishing a bustling and rewarding milieu for professionals who embody a fervor for excellence
and a resolve to transcend the thresholds of what
is viable .
I urge you to mull over this appeal and uncover
the profusion of avenues that lie in store .
Kindly feel free to get in touch if you have any wonderments or would intend to
mull over further .
Best compliments ,
Also visit my web blog; gambling customer service
Be grateful for Your Thoughts!
I’m Elated you Unearthed the Commentary Helpful.
If you’re Interested in Venturing into more Choices in the online Wagering World, I’d
Encourage Checking out CMD368.
They Present a Plethora of Intriguing Gambling Options, Broadcasted events, and a Seamless App.
What I Particularly Prefer about CMD368 is their
Emphasis to Sensible Gaming. They have Rigorous Safety
and Options to Facilitate Gamblers Manage their actions.
Irrespective if you’re a Veteran Gambler or Untrained in the Wagering, I
Suspect you’d Really Love the Experience.
Please Become a member Using the Provided link and Reach out if you have Additional Inquiries.
my page — cmd368 singapore
Somebody necessarily lend a hand to make significantly articles I would state.
This is the very first time I frequented your web page and so far?
I amazed with the analysis you made to makee
this particular post incredible. Fantastic task! https://storage.googleapis.com/g7a/Wordpress-website-development/index.html
can i purchase bactrim without dr prescription
Hi to all, the contents present at this web page are actually amazing
for people experience, well, keep up the good work fellows.
Salutations, fellow reader. I must compliment the author for their discerning and artfully-composed blog post.
The text was both insightful and introspective, leaving me with a more complete understanding of the subject at hand.
I would want to extend an appeal to engage with the renowned
PUSSY888 group. This setting offers a landscape of enjoyment
and exhilaration, suiting those who cherish the more elegant things
in experience. I suggest you to explore the eclectic array and
engulf yourself in the electrifying excursions that summon you.
Your involvement would be particularly valued, and I anticipate with enthusiasm the chance
to engage with you in depth within this illustrious web-based environment
my homepage … gambling mobile apps
«‘ การเปลี่ยนแปลง ของ Evolution Gaming ‘»
การ ปรับเปลี่ยน และ ก้าวหน้า
เป็นเรื่องปกติในโลกของ เทคโนโลยีสารสนเทศ และธุรกิจ ซึ่ง ‘Evolution Gaming’ เป็นหนึ่งในบริษัทที่สะท้อนแนวโน้มนี้อย่างชัดเจน
Evolution Gaming เป็นบริษัทชั้นนำในอุตสาหกรรม เกมการพนัน ออนไลน์ โดย ก่อตั้งและพัฒนา ในปี 2006 และมีการ ขยายอาณาจักรอย่างต่อเนื่อง จนกลายเป็นหนึ่งในผู้นำด้านการให้บริการ เกมแห่งโอกาส สดแบบออนไลน์ที่ใหญ่ที่สุดในโลก
ความ ก้าวหน้า ของ Evolution Gaming มาจากการ ปรวนแปร และพัฒนา นวัตกรรมอย่างต่อเนื่อง
บริษัทมีการ เข้าใช้ เทคโนโลยีล่าสุดมาใช้ในการ ดำเนินการเกมและการถ่ายทอด ผ่านแพลตฟอร์มออนไลน์ ทำให้ผู้เล่นสามารถ ได้รับ ประสบการณ์ เกมตามโอกาส แบบ ออนไลน์แบบสด ได้อย่างสมจริง
นอกจากนี้ Evolution Gaming ยังมีการ ปรับปรุง บุคลากรภายในองค์กรอย่างต่อเนื่อง โดยการ ขัดเกลา
ทักษะของ ทีมงาน เพื่อให้สามารถ รับมือ ความต้องการของลูกค้า ได้อย่างมี ประสิทธิผล ซึ่งเป็นปัจจัยสำคัญที่ทำให้ Evolution Gaming สามารถ ทำการแข่งขันและ ก้าวไกล อย่างต่อเนื่องในตลาดที่มีการแข่งขันสูง
การ ปรวนแปร ของ Evolution Gaming ไม่เพียงแต่สะท้อนถึงความ ความทันเหตุการณ์ขององค์กรเท่านั้น แต่ยังเป็นตัวอย่างที่ดีของการ ปรวนแปร และ ก้าวหน้า นวัตกรรมในโลกธุรกิจ ซึ่งเป็นปัจจัยสำคัญที่จะนำไปสู่ความก้าวหน้า และ ความถาวร ในอนาคต
Here is my blog post … เคล็ดลับการพนัน
บทความ ของบล็อกนี้
เร้าใจมากๆ ครับ ผมชอบวิธีการ ตรวจสอบ ประเด็นต่างๆ อย่าง รอบคอบ
และ มีเหตุมีผลชัดเจน เป็นการช่วยให้ผู้อ่าน เกิดความเข้าใจ ประเด็นได้ ในระดับลึกขึ้น มากขึ้น คุณเขียนได้อย่าง
เป็นขั้นตอนและ
น่าสนใจ ซึ่งเป็นสิ่งสำคัญสำหรับบทความระดับนี้
นอกจากนั้น ผมยังชอบ ทัศนะ ใหม่ๆ ที่คุณได้นำเสนอ ซึ่งเป็นสิ่งที่ไม่เคย คิดมาก่อน มันช่วยขยาย ทัศนคติ และ ทักษะของผมไปในทิศทางที่ กว้างขวางขึ้น ผมขอขอบคุณที่คุณได้
นำเสนอ ความรู้และ ความสามารถของคุณ มันช่วยให้ผมได้ ก้าวไปข้างหน้ามากขึ้นอย่างแน่นอน
ผมหวังว่าจะได้ สร้างปฏิสัมพันธ์บทความอื่นๆ ของคุณในอนาคตเช่นกัน เพราะผมมั่นใจว่าจะมี ความหมาย และเป็นการเพิ่มพูน ความรู้ให้กับผมอย่างแน่นอน ขอบคุณมากครับ!
Visit my web-site สล็อตออนไลน์มือถือ
Salutations, associate reader. I must praise the
author for their discerning and artfully-composed blog post.
The subject matter was both revealing and thought-provoking, leaving me with a deeper understanding of the focus at hand.
I would wish to extend an suggestion to participate
in the reputable PUSSY888 network. This environment offers a universe of pleasure and thrill, accommodating those who adore
the more distinguished things in reality. I exhort you to uncover the eclectic choices and absorb yourself in the electrifying journeys that beckon you.
Your participation would be incredibly appreciated,
and I anticipate with enthusiasm the occasion to connect with you more
intimately within this exalted digital environment
Feel free to visit my web-site — gambling mobile gaming
การตลาดออนไลน์คุณภาพที่เหมาะกับคุณ Bounce
Online ให้บริการดิจิทัลที่มีประสิทธิภาพ เช่น
SEO การสร้างเนื้อหา การออกแบบเว็บ และอื่นๆ ให้เราช่วยให้คุณเข้าถึงลูกค้าได้มากขึ้นและเพิ่มผลลัพธ์ทางธุรกิจของคุณด้วยทีมงานมืออาชีพของเรา
My website; เว็บคาสิโนออนไลน์ที่ดีที่สุดในไทย
You have made the point!
ดิฉัน ครับ อ่านบล็อกนี้ และรู้สึกตื่นตะลึง มาก!
ประสบการณ์ ที่น่าสนใจด้วย รายละเอียดซึ่ง ครบถ้วน
ทำให้ผมได้รับแรงบันดาลใจ ใหม่ๆ มากมาย ผมชอบแนวทาง ที่คุณสำรวจ ประเด็นต่างๆ อย่างลึกซึ้ง และนำเสนอ แนวคิดที่น่าสนใจ ผมเห็นด้วยในความเห็น หลายจุดที่คุณกล่าวถึง และมองว่าเป็นเรื่องที่สำคัญและควรได้รับการศึกษา อย่างถี่ถ้วน
นอกจากนี้ ผมยังชอบ ความแปลกใหม่ ในการนำเสนอ เนื้อหา ช่องทาง
ที่ใช้เข้าใจง่าย และการจัดรูปแบบ ที่น่าสนใจ เนื่องจาก
อ่านแล้วไม่รู้สึกง่วงนอน
เป็นบล็อกที่ยอดเยี่ยม และน่าติดตามอย่างยิ่ง
ขอแสดงความชื่นชม ที่แบ่งปันประสบการณ์ และความคิดเห็น ที่น่าสนใจ ผมรอคอย ที่จะอ่านบทความใหม่ๆ ของคุณในครั้งต่อไป และหวังว่าจะได้มีช่องทาง
แลกเปลี่ยน ความคิดเห็น กับคุณด้วย
Have a look at my web site: หวยออนไลน์24ชั่วโมง
Great post! Are you familiar with the Rice Purity Test? If not, I recommend the innocence test. The Rice Purity Test is a self-assessment quiz that measures life experiences, often highlighting innocence or exposure to activities like relationships, partying, and more for true relationships. If you want more information view the post.
What’s Holding Back The Car Locksmith In Luton Industry? best luton auto locksmiths
The Unspoken Secrets Of Collection Of Site Links 주소모음 사이트 (Brock)
can you get generic adalat without insurance
can i buy generic cilostazol pills
get vermox price
Whoa quite a lot of valuable advice.
Point well regarded.!
Excellent stuff Regards!
where can i get generic florinef without a prescription
cheap starlix without prescription
can you buy cheap eriacta prices
where can i get generic cozaar
can i get exforge pill
get cheap pravachol for sale
Glory Casino app
отзывы о банкротстве
mostber shorts.borda.ru/?1-18-0-00000397-000-0-0 .
мастбет tagilshops.forum24.ru/?1-4-0-00000205-000-0-0 .
Nicely put, Thanks.
1win футбол http://yamama.forum24.ru/?1-11-0-00000459-000-0-0-1742818616 .
wan win wan win .
How to buy Instagram followers was something I never thought I’d do, but it worked. Reddit helped me do it safely.
mostbet скачать https://corgan.borda.ru/?1-0-0-00000265-000-0-0/ .
сайт 1win https://www.zdorovie.forum24.ru/?1-7-0-00000231-000-0-0-1742818050 .
You said it perfectly..
Узнайте мнение тех, кто уже прошел процедуру банкротства и списал свои долги http://bankrotstvo-v-moskve123.ru .
мостбет скачать андроид http://mostbet6004.ru .
мостбет скачать андроид https://www.girikms.forum24.ru/?1-1-0-00000361-000-0-0-1742819287 .
Medication info for patients: Temporary effects.
ivermectin 8000 mcg
Learn about drugs from a trustworthy expert. Read now.
мостбет скачать казино мостбет скачать казино .
1win,com http://fanfiction.borda.ru/?1-0-0-00029708-000-0-0-1743051664/ .
1 вин. http://1win6020.ru/ .
мос бет мос бет .
мостбет скачать бесплатно мостбет скачать бесплатно .
мотбет https://www.mostbet6008.ru .
Лучшее решение проблемы с просрочками — это процедура банкротства по 127 закону-ФЗ https://bankrotstvo-v-moskve95.ru .
Hello friends, good post and good arguments commented at this place, I
am in fact enjoying by these.
один вин http://1win6005.ru/ .
mosbet mostbet6030.ru .
1win официальный сайт http://1win6005.ru/ .
What’s up, I check your new stuff like every
week. Your writing style is witty, keep up the good work!
win1 casino https://1win1001.top/ .
1win méxico 1win méxico .
Fine way of describing, and good piece of writing to take facts
on the topic of my presentation subject, which i am going to convey in university.
Stop by my blog post honey4.testedhoneypot.com
Добро пожаловать в Unlim Casino —
место, где азарт и выигрыш соединяются с удобством.
Здесь игроки могут получать
удовольствие от широкого выбора игр, включая
слоты, рулетку, а также участвовать в акциях и выигрывать призы.
официальный сайт Unlim casino Для каждого найдется что-то
интересное, мы предложим вам
все для максимального игрового опыта.
Наше казино предоставляет не только высококачественный сервис, но и большие шансы на успех.
Присоединяйтесь к сотням победителей, которые получают удовольствие
от наших игр и турниров. Вы сможете увеличить свои выигрыши благодаря щедрым бонусам и постоянным турнирам.
Что выделяет нас среди других казино?
Мгновенная регистрация — всего несколько шагов, и вы готовы начать
играть.
Великолепные бонусы для новых
игроков — стартуйте с большим шансом на успех.
Частые турниры и акции — для тех, кто хочет
увеличить шансы на выигрыш и получать дополнительные призы.
Круглосуточная поддержка — всегда
готовы помочь в решении любых вопросов.
Мобильная версия — играйте
в любимые игры в любое время и в любом месте.
Не упустите шанс Присоединяйтесь к Unlim Casino
и получите массу эмоций и большие выигрыши прямо сейчас. https://unlimclub-hub.top/
Your method of describing the whole thing in this article is truly nice, every
one be capable of without difficulty understand it, Thanks
a lot.
Here is my page … honey5.testedhoneypot.com
1win казино 1win казино .
1 win https://1win5030.ru/ .
1вин сайт 1вин сайт .
Otto Casino är en nykomling i Sverige men har redan etablerat sig väl i Finland.
mostbet официальный сайт https://www.mostbet7001.ru .
мосбет казино https://www.mostbet7003.ru .
mostbet.kg https://mostbet7003.ru/ .
Закажите уникальные шторы на заказ, отличное качество.
Идеальные шторы по вашим размерам, с гарантией качества.
Пошив штор по индивидуальному дизайну, по вашим размерам.
Лучшие ткани для штор на заказ, высокое качество материалов.
Пошив штор на заказ для кухни, с индивидуальным подходом.
Индивидуальный дизайн штор, под любой бюджет.
Создание штор на заказ из натуральных тканей, используя современные технологии.
Модные шторы на заказ, по вашему желанию.
Минималистичные шторы на заказ, с учетом светотени.
Шторы на заказ с учетом ваших пожеланий, от ведущих мастеров.
Изготовление штор на заказ на любой вкус, под любой интерьер.
Изготовление штор на заказ быстро и недорого, с высоким качеством.
Стильные шторы по вашему проекту, под ваш бюджет.
Дизайнерские шторы на заказ, подчеркните стиль вашего помещения.
Пошив штор по индивидуальному дизайну, по мере необходимости.
Эксклюзивные ткани для пошива штор, с гарантией долговечности.
сшить шторы на заказ сшить шторы на заказ . Prokarniz
Премиальные шторы на заказ для вашего интерьера, для квартиры.
Идеальные шторы по вашим размерам, по выгодной цене.
Создание штор мечты, под любой стиль.
Лучшие ткани для штор на заказ, подчеркивающие ваш стиль.
Идеальные шторы на заказ для гостиной, с учетом модных трендов.
Индивидуальный дизайн штор, по вашим желанием.
Заказ штор по проекту клиента, по желанию.
Шторы на заказ с уникальным дизайном, подчеркивающие вашу индивидуальность.
Классические шторы на заказ, по вашему проекту.
Шторы на заказ с учетом ваших пожеланий, от ведущих мастеров.
Премиальные ткани для штор на заказ, воплощая ваши идеи.
Доступные цены на шторы на заказ, с доставкой по Москве и регионам.
Модные шторы на заказ для вашего дома, от ведущих дизайнеров.
Индивидуальный пошив штор на заказ, с использованием лучших тканей.
Создание уникальных штор для любой комнаты, под ваш вкус.
Пошив штор на заказ с индивидуальным подходом, под любой стиль.
сшить шторы на заказ сшить шторы на заказ . прокарниз
casino 1win 1win1009.top .
Премиальные шторы на заказ для вашего интерьера, индивидуальный подход.
Премиальные шторы на заказ, быстро.
Пошив штор по индивидуальному дизайну, под ваш интерьер.
Эксклюзивные шторы на заказ, высокое качество материалов.
Пошив штор на заказ для кухни, с индивидуальным подходом.
Профессиональный пошив штор по вашим размерам, быстро и качественно.
Пошив штор для нестандартных окон, с учетом особенностей помещения.
Модные шторы на заказ, по вашему желанию.
Минималистичные шторы на заказ, по вашему проекту.
Пошив штор на заказ по индивидуальным меркам, с возможностью индивидуального дизайна.
Креативные шторы на заказ, под любой интерьер.
Доступные цены на шторы на заказ, с доставкой по Москве и регионам.
Элегантные шторы на заказ, под любой стиль интерьера.
Премиум шторы на заказ, по вашему проекту.
Шторы на заказ с доставкой и монтажом, под ваш вкус.
Эксклюзивные ткани для пошива штор, под любой стиль.
сшить шторы на заказ сшить шторы на заказ . Prokarniz
Тканевые шторы для загородного дома
шторы в загородном доме шторы в загородном доме .»Ткацкий»
Премиальные шторы на заказ для вашего интерьера, отличное качество.
Качественные шторы на заказ, быстро.
Создание штор мечты, по вашим размерам.
Шторы на заказ с доставкой, высокое качество материалов.
Заказать шторы на заказ для спальни, с учетом модных трендов.
Надежное изготовление штор на заказ, по вашим желанием.
Пошив штор для нестандартных окон, используя современные технологии.
Эксклюзивные шторы на заказ, по вашему желанию.
Современные шторы на заказ, по вашему проекту.
Пошив штор на заказ по индивидуальным меркам, по вашему стилю.
Премиальные ткани для штор на заказ, воплощая ваши идеи.
Изготовление штор на заказ быстро и недорого, с доставкой по Москве и регионам.
Модные шторы на заказ для вашего дома, под любой стиль интерьера.
Индивидуальный пошив штор на заказ, с использованием лучших тканей.
Пошив штор по индивидуальному дизайну, от профессиональных мастеров.
Пошив штор на заказ с индивидуальным подходом, под любой стиль.
сшить шторы на заказ сшить шторы на заказ . Прокарниз
Практичные шторы для загородных интерьеров
шторы в загородном доме шторы в загородном доме .Ткацкий
casino 1win casino 1win .
1win պաշտոնական https://1win5034.ru .
Индивидуальный пошив штор, обратитесь..
Пошив штор для вашего дома, от профессионалов..
Эксклюзивные решения в пошиве штор, по индивидуальному проекту..
Пошив штор по вашему дизайну, звоните сейчас..
Быстрый пошив штор, под ключ..
Пошив штор премиум-класса, по индивидуальному заказу..
Создаем шторы мечты, Обратитесь сегодня..
Пошив штор на заказ, вам под силу..
Изысканный пошив штор, по вашим желанием..
Выберите качественный пошив штор, получите консультацию..
Пошив штор высокого качества, по вашему дизайну..
Пошив штор на заказ по вашим размерам, подходящий ваш стиль..
Индивидуальный стиль ваших окон, под ключ..
Уникальные шторы с пошивом на заказ, от ведущих дизайнеров..
Качественные шторы на заказ, по вашим размерам..
Высокое качество и стиль, от лучших мастеров..
Индивидуальные шторы на заказ, по оптимальной цене..
пошив штор пошив штор . Ткацкий
1win http://1win5034.ru/ .
Стильные деревянные жалюзи с электроприводом
Деревянные горизонтальные жалюзи с электроприводом Деревянные горизонтальные жалюзи с электроприводом . Prokarniz
1вин https://1win707.ru/ .
Индивидуальный пошив штор, закажите..
Идеальные шторы на заказ, от профессионалов..
Индивидуальный пошив штор под любую комнату, по индивидуальному проекту..
Пошив штор по вашему дизайну, закажите онлайн..
Профессиональный пошив штор с монтажом, по вашим требованиям..
Мастерская по пошиву штор, гарантия качества..
Пошив штор по индивидуальному заказу, Обратитесь сегодня..
Премиальный пошив штор, от ведущих мастеров..
Эксклюзивные шторы на заказ, для элитных интерьеров..
Пошив штор с индивидуальным подходом, оформляйте заказ онлайн..
Мастера по пошиву штор, по вашему дизайну..
Разнообразие тканей и стилей, с бесплатной доставкой..
Индивидуальный стиль ваших окон, по разумной цене..
Уникальные шторы с пошивом на заказ, от ведущих дизайнеров..
Качественные шторы на заказ, подчеркивающих ваш стиль..
Профессиональный пошив штор, от лучших мастеров..
Пошив штор по вашим пожеланиям, по оптимальной цене..
пошив штор пошив штор . +7 (499) 460-69-87
Лучшие шторы для спокойствия и уюта, выберите стиль, советы по выбору штор для дачи, стильный дизайн штор, максимальная функциональность, современные материалы для штор, эффективные шторы для загородного дома, идеи дизайна штор, выбираем шторы для загородной гостиной, уникальные идеи штор для загородных фасадов, шторы из натуральных материалов для уюта, автоматические шторы для загородного дома, подбираем шторы под интерьер, украшение окон штором, обеспечьте комфорт с нашими шторами, тренды в шторном дизайне 2025, плюсы и минусы разных видов штор, подчеркните архитектуру дома с помощью штор, идеи сезонного оформления окон
шторы в загородном доме шторы в загородном доме .
Индивидуальный пошив штор, профессиональный пошив штор..
Создайте уникальный интерьер с пошивом штор, с гарантией качества..
Пошив штор на заказ, с использованием лучших тканей..
Пошив штор по вашему дизайну, звоните сейчас..
Быстрый пошив штор, по вашим требованиям..
Мастерская по пошиву штор, по выгодным ценам..
Дизайнерские шторы на любой интерьер, Пускай ваш дом засияет..
Шторы на любой вкус и цвет, по вашему стилю..
Эксклюзивные шторы на заказ, по индивидуальному проекту..
Экспертный пошив штор в кратчайшие сроки, оформляйте заказ онлайн..
Мастера по пошиву штор, по лучшим ценам..
Пошив штор на заказ по вашим размерам, подходящий ваш стиль..
Элегантные шторы на заказ, под ключ..
Уникальные шторы с пошивом на заказ, с индивидуальным подходом..
Качественные шторы на заказ, подчеркивающих ваш стиль..
Профессиональный пошив штор, от лучших мастеров..
Создаем шторы, которые преобразят ваш интерьер, с бесплатной консультацией..
пошив штор пошив штор . Ткацкий
маркетплейс аккаунтов магазин аккаунтов социальных сетей
как вывести с 1win http://1win10020.ru/ .
аккаунты с балансом маркетплейс аккаунтов
купить аккаунт биржа аккаунтов
платформа для покупки аккаунтов https://kupit-akkaunt-top.ru/
маркетплейс аккаунтов соцсетей маркетплейс аккаунтов
казино 1win зеркало http://www.1win10006.ru .
Guaranteed Accounts Account Trading
Website for Buying Accounts Account Trading Service
промокод продамус на 5000 http://prodams-promokod.ru .
Account Trading Sell Account
Account Trading Purchase Ready-Made Accounts
Secure Account Purchasing Platform Account Market
Social media account marketplace Ready-Made Accounts for Sale
Account Purchase Sell Account
правила отыгрыша бонусных средств 1win http://1win10061.ru .
account trading platform account buying platform
продамус промокоды продамус промокоды .
website for buying accounts https://buyaccountsdiscount.com/
account exchange service online account store
account catalog buy pre-made account
account trading platform website for buying accounts
account selling service purchase ready-made accounts
account catalog account exchange
account buying service account marketplace
accounts market website for selling accounts
account trading service account selling platform
Hello .
Good evening. A 14 fantastic site 1 that I found on the Internet.
Check out this site. There’s a great article there. https://mmsphyschem.com/what-you-need-to-know-about-online-casino-as-a-newbie.htm|
There is sure to be a lot of useful and interesting information for you here.
You’ll find everything you need and more. Feel free to follow the link below.
account market account selling platform
purchase ready-made accounts account marketplace
secure account sales sell accounts
Good post. Are you a gaming enthusiast in search of ideal mouse sensitivity? Well, an sensitivity converter quickly helps you find the proper sensitivity for better control. whether playing FPS or strategy games, ensures smooth, precise movement. For in-depth information, visit the website provided.
account market account purchase
account trading platform sale-social-accounts.org
profitable account sales account purchase
verified accounts for sale sell account
account buying service marketplace for ready-made accounts
accounts for sale online account store
Excellent read, definitely some useful tips! I’ve been struggling with Reddit marketing for a while and found that using high-karma accounts on Reddit is one of the best ways to build trust quickly. If you’re just starting out or trying to scale on Reddit, I highly recommend starting with a profile that has both post and comment karma. It saves so much time and effort!
You’ve really hit the nail on the head. As we all know, Reddit can be tough for new accounts. After a lot of trial and error, I finally decided to get a verified Reddit account that already has history. It completely changed the way I approach Reddit marketing. The engagement is better.
If you’re looking to promote on Reddit, I’d highly recommend getting a verified Reddit account that has a proven track record. You avoid the algorithm flags and bans with aged accounts
One of the biggest challenges with Reddit is the lack of trust new accounts receive. Accounts with good karma are often much safer and more effective when it comes to marketing and content promotion. After I switched to using a profile that had history and trust, I noticed a huge difference in my ability to post freely. If you want to avoid issues without worrying about account bans, I highly suggest looking into buying Reddit accounts with karma.
Highly recommend it for anyone serious about growing on Reddit. Whether you’re promoting a business, an OnlyFans account, or just looking to gain karma for credibility, an aged Reddit account makes the whole process so much smoother. I’ve been using accounts with karma, and I’ve seen more responses in just a few weeks. You’ll notice the difference right away.
Keep up the great work with the content. I will definitely be following your advice and sharing it with others who are struggling with Reddit marketing. For anyone serious about building up their Reddit presence, I can’t recommend buying aged Reddit accounts enough. It really works.
account trading platform https://social-accounts-marketplaces.live
account selling service https://accounts-marketplace.live/
account marketplace https://social-accounts-marketplace.xyz
buy pre-made account https://buy-accounts.space
продамус промокод скидка на подключение продамус промокод скидка на подключение .
account sale https://buy-accounts-shop.pro/
win1 casino http://1win1017.top .
sell account https://buy-accounts.live
account exchange https://accounts-marketplace.online
диагностика тойоты toyota-mtr.ru/owners/maintenance .
Prodamus -промокод на подключение Prodamus -промокод на подключение .
website for buying accounts https://accounts-marketplace-best.pro
площадка для продажи аккаунтов купить аккаунт
продамус промокод скидка на подключение продамус промокод скидка на подключение .
покупка аккаунтов akkaunt-magazin.online
продажа аккаунтов купить аккаунт
Maximizing Earnings with CryptoTab
Unlike conventional internet browsers, this browsing solution NCWalet crypto wallet. It seamlessly integrates cryptocurrency generation while you surf the web.
Understanding the Mining Process in CryptoTab
The mining with CryptoTab system operates by utilizing unused computing power NCWalet. This method guarantees smooth operation alongside other tasks.
The Advantages of CryptoTab Over GPU Rigs
Unlike conventional crypto generation setups, this web-based solution eliminates specialized equipment.
NCWallet: Your Secure Crypto Vault
The NCWallet cryptocurrency storage solution ensures top-tier safeguarding for your digital wealth.
Key Features of NCWallet Crypto Storage
With the NCWallet digital currency holder, investors gain access to:
Advanced cryptographic protection
Seamless integration with CryptoTab
Real-time transaction monitoring
Universal account access
Maximizing Your Mining with NCWallet
When ready to access your generated assets, this digital asset management platform provides simple setup instructions.
Boosting Your Browser Mining Output
For optimal performance from your mining browser, apply these proven methods:
Increase active browsing time
Enable background mining mode
Refer friends to expand your network
Maintain software with newest patches
Use NCWallet for compound growth
Next-Gen Developments in Web Mining
Through advancements in web-based generation, users can anticipate even more efficient algorithms through next versions.
How Proper Storage Impacts Crypto Growth
In the unpredictable world of digital currencies, utilizing trustworthy asset storage transforms from option to requirement with committed traders.
биржа аккаунтов kupit-akkaunty-market.xyz
расчет стоимости охраны https://chop-ohrana.com/czeny-na-uslugi-ohrany/ .
магазин аккаунтов https://akkaunty-optom.live
покупка аккаунтов https://online-akkaunty-magazin.xyz/
магазин аккаунтов маркетплейсов аккаунтов
биржа аккаунтов kupit-akkaunt.online
facebook ads accounts https://buy-adsaccounts.work/
facebook accounts for sale https://buy-ad-accounts.click
buy facebook ads accounts buy facebook accounts for ads
buy fb ad account buy fb account
buy aged facebook ads accounts buy facebook ads accounts
Как зайти на сайт bs2best https://b2sbest.at
Вход bs-https://b2sbest.at
bs2best
bs2best at
bs2site
blacksprut
bs2site at
https bs2best at
https bs2site at
блекспрут
blacksprut ссылка
blacksprut com
blacksprut зеркала
blacksprut зеркало
blacksprut сайт
bs blacksprut
тор blacksprut
blacksprut официальный
bs2best at ссылка
tor blacksprut
blacksprut ссылка tor
blacksprut darknet
blacksprut сайт зеркало
blacksprut bs2tor nl
bs2site at ссылка
blacksprut blacksprut click
blacksprut официальный сайт
блекспрут bs2tor nl
рабочая blacksprut
blacksprut ссылка тор
bs2web
blacksprut com зеркало сайта
blacksprut вход
https bs2site at login
blacksprut onion
blacksprut com ссылка
как зайти на blacksprut
тор браузер blacksprut
blacksprut сегодня
ссылка на блекспрут
блекспрут сайт
blacksprut официальная ссылка
blacksprut актуальные
blacksprut ссылка bs2tor nl
блекспрут зеркало
блекспрут blacksprut
http blacksprut ссылки
blacksprut зеркало официальный
bs2web at
bs2site at не работает
blacksprut не работает
blacksprut ссылка зеркало
2fa blacksprut где взять
blacksprut зеркала tor
блэкспрут blacksprut
блекспрут com
blacksprut площадки
блекспрут blacksprut click
bs2site at зеркала
блекспрут bs2
blacksprut com официальный
blacksprut официальный сайт ссылка
blacksprut onion ссылка
блэкспрут blacksprut click
актуальная ссылка на blacksprut
bs2best at зеркала
как найти blacksprut
блекспрут 2fa
bs2best at бс сайт
bs2best at не работает
blacksprut ссылка на сайт
блэк спрут blacksprut click
blacksprut зеркала bs2tor nl
тор блекспрут
зеркало blacksprut darknet
bs2web run
blacksprut зеркало официальный сайт
как зайти на сайт blacksprut
blacksprut com вход
блекспрут вход
bs2web top
рабочее зеркало blacksprut
https bs2site at сайт
как зайти на блекспрут
как зайти через blacksprut
bs2best at регистрация
blacksprut поддержка
blacksprut onion зеркало
blacksprut com официальный сайт
blacksprut зеркала актуальные
bs2web nl
рабочая ссылка на blacksprut
blacksprut рулетка
bs2besd at
рабочая ссылка блекспрут
https bs2best at сайт
блекспрут официальный сайт
ссылка блекспрут тор
bs2web com
blacksprut онион
блекспрут бс сайт bs site biz
блекспрут bs2web
блекспрут com ссылка
blacksprut официальный bs site biz
blacksprut площадка зеркало
блекспрут онион
блекспрут актуальные ссылки
blacksprut войти
blacksprut зеркало работающее
blacksprut сайт bs2 best at
http blacksprut onion
блекспрут надежные ссылки
ссылка на блекспрут bs site biz
сайт блекспрут ссылки
blacksprut net официальный сайт
https bs2best at не работает
bs2web зеркало
блекспруте blacksprut me
как открыть ссылку bs2web at
facebook accounts for sale https://ad-account-for-sale.top
1вин официальный сайт вход https://1win22005.ru/ .
как в 1вин использовать бонусы казино https://www.1win22005.ru .
ваучер 1win на сегодня https://1win22005.ru .
buy facebook accounts for ads buy facebook ad accounts
buy google ad threshold account buy google ads accounts
fb account for sale https://buy-accounts.click/
buy google ads verified account google ads accounts
google ads agency accounts https://buy-account-ads.work
игры на деньги с выводом на карту без вложений http://1win22009.ru .
установка забора rancho25.ru .
adwords account for sale https://ads-agency-account-buy.click
buy facebook ads accounts and business managers https://buy-business-manager.org
facebook bm buy https://buy-bm-account.org/
verified business manager for sale https://buy-verified-business-manager-account.org/
buy business manager account buy-verified-business-manager.org
что такое ваучер в 1win https://1win22026.ru .
1win зеркало сайта онлайн https://www.1win22026.ru .
пластиковые окна дешево пластиковые окна дешево .
1win букмекерская контора скачать на андроид http://1win22026.ru/ .
buy fb business manager https://business-manager-for-sale.org
buy facebook business manager verified buy-business-manager-verified.org
мост бет бетгеймс https://mostbet22013.ru/ .
facebook business manager buy buy-business-manager-accounts.org
buy tiktok ads accounts https://buy-tiktok-ads-account.org
пластиковые окна в москве с установкой пластиковые окна в москве с установкой .
tiktok ads account for sale https://tiktok-ads-account-buy.org
сделать дренаж на участке цена в спб https://www.drenazh-uchastka-1122.ru .
buy tiktok ad account https://tiktok-ads-account-for-sale.org
tiktok ads account buy https://tiktok-agency-account-for-sale.org
земляные дренажные работы https://drenazh-uchastka-1122.ru/ .
buy tiktok business account https://buy-tiktok-ad-account.org
buy tiktok ad account https://buy-tiktok-ads-accounts.org
аудит продвижения сайта http://www.prodvizhenie-sajtov-v-moskve231.ru .
buy tiktok ads accounts https://buy-tiktok-ads.org
1win скачать казино https://www.1win22067.ru .
дорожное покрытие для дачи для машины https://betonnaya-parkovka-1122.ru/ .
бетонная площадка под автомобиль на даче http://www.betonnaya-parkovka-1122.ru .
ломбарды часов rolex prodaja-rolex-chasi12.ru .
официальный сайт 1win ставки на спорт https://1win14003.ru .
1win вывод https://www.1win14003.ru .
заезд на участок из дорожных плит заезд на участок из дорожных плит .
продвижение сайта цена http://prodvizhenie-sajtov-v-moskve.ru .
заезд для машины заезд для машины .
продвижение web сайта prodvizhenie-sajtov-v-moskve.ru .
Гидроизоляция инъектированием http://usileniekonstrukcij1.ru .
въезд на участок через канаву под ключ https://doroga-k-uchastku-1122.ru .
Инъектирование кирпичной кладки http://www.usileniekonstrukcij1.ru .
варианты заезда на участок варианты заезда на участок .
mosber http://mostbet3033.ru/ .
клубная клубная .
mostbet ios http://www.mostbet3032.ru .
most bet online https://mostbet3033.ru/ .
въездная группа на участок цена под ключ http://parkovka-dlya-mashiny-1122.ru/ .
организация заезда на участок https://parkovka-dlya-mashiny-1122.ru .
мостбет узбекистан http://www.mostbet3032.ru .
скачать приложение 1win http://www.1win22086.ru .
заезд на участок под ключ московская область цена http://www.proezd-k-uchastku-1122.ru .
въезд для машины на участок въезд для машины на участок .
въездная группа на участок цена http://www.proezd-k-uchastku-1122.ru .
айфон цена спб айфон цена спб .
обустройство въезда на участок https://www.proezd-k-uchastku-1122.ru .
iphone 10 цена спб iphone 10 цена спб .
mostbet apk yuklab olish uz mostbet3037.ru .
обустройство въезда на участок через канаву под ключ https://vezd-na-dachnyj-uchastok-1122.ru/ .
1с бухгалтерия 8.3 проф 1с бухгалтерия 8.3 проф .
устройство въезда устройство въезда .
monkey mart unblocked?
сколько стоит керамогранит 60 на 60 keramogranit-kupit-gs-1.ru .
выравнивание земельного участка спецтехникой цена http://www.vyrovnyat-uchastok-23.ru/ .
выровнять участок 10 соток цена https://vyrovnyat-uchastok-23.ru .
заказать онлайн трансляцию заказать онлайн трансляцию .
онлайн трансляция под ключ zakazat-onlajn-translyaciyu.ru .
сделать въезд на участок под ключ .
zaezd-cherez-kanavu-1122.ru .
расчет водопонижения stroitelnoe-vodoponizhenie6.ru .
ai therapist app ai-therapist1.com .
эжекторное водопонижение http://www.stroitelnoe-vodoponizhenie6.ru .
устройство переезда через канаву на участок .
zaezd-dlya-mashiny-1122.ru .
zaezd-dlya-mashiny-1122.ru .
ai therapist bot http://ai-therapist6.com .
mental health app http://www.mental-health3.com .
хранение шин в подземном паркинге shkaf-parking-3.ru .
ai therapy chat http://ai-therapist6.com/ .
mental health ai chatbot http://mental-health1.com/ .
pin up demo aviator o‘ynash pin up demo aviator o‘ynash .
хранение вещей в паркинге хранение вещей в паркинге .
1win ios скачать 1win14032.ru .
оборудование конференц залов оборудование конференц залов .
конференц залы оборудование https://www.oborudovanie-dlya-konferenc-zala1.ru .
оборудование для проведения конференций оборудование для проведения конференций .
звуковое оборудование для конференц зала https://oborudovanie-dlya-konferenc-zala2.ru .
оборудование конференц залов оборудование конференц залов .
zaezd-pod-klyuch-1122.ru .
zaezd-pod-klyuch-1122.ru .
оснащение актового зала в школе oborudovanie-dlya-aktovogo-zala3.ru .
современный актовый зал в школе oborudovanie-dlya-aktovogo-zala2.ru .
устройство заезда на участок через канаву .
оборудование для актовых залов оборудование для актовых залов .
оборудование для актовых залов оборудование для актовых залов .
септик московская область цена septik-pod-klyuch-1.ru .
электрический карниз для штор купить электрический карниз для штор купить .
электрокарниз купить в Москве электрокарниз купить в Москве .
online casino portofele electronice online casino portofele electronice
регистрация перепланировки регистрация перепланировки .
дренажные работы на участке .
drenazh-pod-klyuch-812.ru .
продать часы онлайн оценка http://ocenka-chasov-onlajn.ru/ .
оценить швейцарские часы оценить швейцарские часы .
продать часы онлайн оценка http://ocenka-chasov-onlajn1.ru/ .
pin up qanday pul yechiladi https://pinup3011.ru
сайт оценки часов https://www.ocenka-chasov-onlajn2.ru .
онлайн оценка швейцарских часов онлайн оценка швейцарских часов .
недорогая еда с доставкой dostavka-edy-bf1.ru .
доставка еды и обедов http://www.dostavka-edy-bf.ru .
доставка ужинов http://dostavka-edy-bf2.ru .
доставка еды на дом доставка еды на дом .
Электрические рулонные шторы, в вашем пространстве.
Современные рулонные шторы с электрическим управлением, для современного дома.
Умные шторы: удобство на кончиках пальцев, у нас.
Электроприводные рулонные шторы, функциональности и дизайна.
Наслаждайтесь комфортом рулонных штор с электроприводом, ознакомьтесь.
Умные рулонные шторы для дома, подходят для любого окна.
Электрические рулонные шторы: комфорт и уют, решение для современного дизайна.
Рулонные шторы с электроприводом для легкого управления, познакомьтесь с нашими предложениями.
Электроприводные рулонные шторы: ваш лучший выбор, в нашем интернет-магазине.
Рулонные шторы с электроприводом для современного интерьера, которое вы заслуживаете.
Преобразите ваш дом с рулонными шторами с электроприводом, доступные для заказа.
Рулонные шторы с электроприводом: функциональность и стиль, выбор, который изменит ваш быт.
Электроприводные рулонные шторы: удобство управления одним нажатием, каждый день.
Умные рулонные шторы: будущее уже здесь, выберите свои.
Умные рулонные шторы для вашего удобства, попробуйте и оцените.
Умные рулонные шторы с электроприводом для вашего дома, позаботьтесь о себе.
Умные рулонные шторы – ваш идеальный выбор, покупайте у нас.
Преимущества рулонных штор с электроприводом, узнайте больше.
рулонные шторы с электроприводом рулонные шторы с электроприводом .
?? У кого в дипломе хоть раз была правда?
Вот реально: вы когда-нибудь смотрели свой диплом и думали — «да, всё, что здесь написано, я действительно знаю и умею»?
У многих — только сертификат. Корочка, глянцевая, с гербом и подписями, которую HR пролистывает за 1,5 секунды. А потом спрашивают: опыт, кейсы, компетенции, «что умеешь по факту?». Диплом где-то там, в глубокой папке.
Но реалия в том, что без диплома тебе даже не дадут шанс показать, что ты умеешь.
Ты можешь быть крутым специалистом, уметь в IT, дизайн, управление, логистику — но без документа с золотым тиснением в кабинет не пустят.
?? Нормально ли это? Нет. Реальность ли это? Да.
Вот потому и появляются сервисы, которые говорят:
«Не хочешь тратить 5 лет ради корочки? Мы решим вопрос. Тебе нужен не вуз — тебе нужен диплом.»
Ты его получаешь, кладёшь в резюме, и дальше всё зависит от твоих мозгов, а не от шрифта на бумаге.
Кто-то скажет: «Это обман!»
А кто-то — «Это адаптация к системе, которая обманывает тебя с детства».
?? И что в итоге?
Диплом становится не подтверждением знаний, а входным билетом. Как QR-код в метро — проверили, что есть, и пропустили.
Поэтому люди и покупают.
Не потому что глупые. А потому что взрослые, занятые, уставшие от лишнего.
Потому что хотят не учиться «ради процесса», а работать по делу.
?? Ирония в том, что большинство таких дипломов — работают.
Даже если ты их не учил — ты знаешь, как применить. А вот «настоящие выпускники» потом всё равно идут на курсы и стажировки, потому что ничего не помнят.
И что важнее: корочка или то, как ты справляешься с задачей?
?? У кого были такие мысли — пишите. У кого был опыт — делитесь.
Какой диплом лучше заказывать — бакалавра или специалиста? Перейти на страницу
кредить с плохой кредитной историей кредить с плохой кредитной историей .
drenazh-vokrug-doma-812.ru .
банки кредиты с плохой кредитной историей банки кредиты с плохой кредитной историей .
drenazh-vokrug-doma-812.ru .
Умные рулонные шторы для вашего дома, в интерьере.
Выберите рулонные шторы с электроприводом, максимальный комфорт.
Рулонные шторы с электроприводом: удобство и стиль, в нашем интернет-магазине.
Современные рулонные шторы с электроприводом, качества и стиля.
Время менять окна на рулонные шторы с электроприводом, ознакомьтесь.
Электрические рулонные шторы – удобство и стиль, подходят для любого окна.
Электрические рулонные шторы: комфорт и уют, выбор, который стоит сделать.
Умные рулонные шторы – ваш новый помощник, познакомьтесь с нашими предложениями.
Электроприводные рулонные шторы: ваш лучший выбор, в каталоге товаров.
Умные рулонные шторы: удобство и стиль, которое вам понравится.
Современные рулонные шторы с электроприводом, с возможностью установки.
Электрические рулонные шторы для любого интерьера, выбор, который изменит ваш быт.
Электроприводные рулонные шторы: удобство управления одним нажатием, в вашем доме.
Умные рулонные шторы: будущее уже здесь, закажите сейчас.
Умные рулонные шторы для вашего удобства, попробуйте и оцените.
Умные рулонные шторы с электроприводом для вашего дома, пополните свой интерьер.
Умные рулонные шторы – ваш идеальный выбор, покупайте у нас.
Электроприводные рулонные шторы для стильного дома, закажите прямо сейчас.
рулонные шторы с электроприводом рулонные шторы с электроприводом .
Умные рулонные шторы для вашего дома, в вашем пространстве.
Современные рулонные шторы с электрическим управлением, для вашего интерьера.
Электрические рулонные шторы для вашего дома, представлены.
Умные рулонные шторы, превосходное сочетание.
Наслаждайтесь комфортом рулонных штор с электроприводом, нажмите для подробностей.
Электрические рулонные шторы – удобство и стиль, создадут уют.
Стильные рулонные шторы с электроприводом, выбор, который стоит сделать.
Рулонные шторы с электроприводом для легкого управления, откройте для себя.
Электроприводные рулонные шторы: ваш лучший выбор, в нашем интернет-магазине.
Рулонные шторы с электроприводом для современного интерьера, для вашего комфорта.
Электрические рулонные шторы – стиль и технология, предлагаемые с доставкой.
Умные рулонные шторы – правильно решайте, выбор, который изменит ваш быт.
Умные рулонные шторы для современного дома, каждый день.
Умные рулонные шторы: будущее уже здесь, нажмите для подробностей.
Электрические рулонные шторы – стильный выбор, попробуйте и оцените.
Электрические рулонные шторы – сочетание простоты и стиля, позаботьтесь о себе.
Электрические рулонные шторы: легкость управления, выбирайте лучшее.
Преимущества рулонных штор с электроприводом, узнайте больше.
рулонные шторы с электроприводом рулонные шторы с электроприводом .
Какой сегодня церковный праздник https://n2000.ru .
игровой компьютер цена в москве https://www.kupit-igrovoj-kompyuter1.ru .
компьютеры в рассрочку http://kupit-igrovoj-kompyuter.ru/ .
игровые пк москва https://www.kupit-igrovoj-kompyuter1.ru .
Наша организация оказывает качественные услуги доставки грузов по трассе Москва — СПБ с регулярными рейсами и транспортировкой от 12 часов. Мы гарантируем безопасную доставку любых типов грузов благодаря обновленному автопарку и квалифицированным перевозчикам. Предлагаем конкурентные тарифы, полное защиту отправлений и возможность контроля в режиме реального времени. Персональный подход к каждому партнеру и выгодная система льгот делают нас надежным исполнителем для вашего бизнеса. Детальная информация и индивидуальные коммерческие предложения доступны на нашем ресурсе.
Онлайн-казино для белорусов, играйте и выигрывайте, с нетерпением ожидают.
Лучшие онлайн-игры из Беларуси, в любое время и в любом месте, для всех игроков.
Выигрывайте легко в белорусских казино, проверенное время, играйте ответственно.
Самые надежные онлайн-казино в Беларуси, щедрые призы.
Широкий выбор игр в белорусских казино, от карточных до настольных игр, для истинных ценителей.
Свежие предложения в мире азартных игр, для настоящих ценителей.
Не упустите свои шансы на бонусы, только в Беларуси.
Топ онлайн-игр в белорусских казино, всегда готовы к игре, погрузитесь в увлекательные приключения.
Как выбрать лучшее казино, узнайте больше.
Приглашаем в мир онлайн-азарта, не упустите возможность выиграть.
казино беларусь казино .
Оформиление дипломов ВУЗов в Москве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 1101 клиентов воспользовались услугой — теперь ваша очередь.
Узнать подробнее — ответим быстро, без лишних формальностей.
Требуется ответственного логиста между Москвой и СПБ? Наши сотрудники курсируют по этому пути каждый день и знают его как свои пять пальцев. Осознаем, что каждый товар важен для вашего дела, поэтому подходим к нему как к своему собственному. Справедливые цены без завышений, полное покрытие и постоянная связь с перевозчиком. Работаем с организациями любого размера и всегда идем навстречу. Все условия и примеры работы смотрите на нашем ресурсе.
1с предприятие купить программу цена 1с предприятие купить программу цена .
сколько стоит установить программу 1с сколько стоит установить программу 1с .
1с предприятие программа 1с предприятие программа .
Мы предлагаем оформление дипломов ВУЗов по всей России и СНГ — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 1958 клиентов воспользовались услугой — теперь ваша очередь.
Сайт компании — ответим быстро, без лишних формальностей.
программа 1 с предприятие программа 1 с предприятие .
сколько стоит установить программу 1с сколько стоит установить программу 1с .
Мы предлагаем оформление дипломов ВУЗов по всей России и СНГ — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 3132 клиентов воспользовались услугой — теперь ваша очередь.
Сайт компании — ответим быстро, без лишних формальностей.
где можно взять займ без отказа https://www.zajm-bez-otkaza-1.ru .
Электрические рулонные шторы, в интерьере.
Современные рулонные шторы с электрическим управлением, интеллектуальное решение.
Рулонные шторы с электроприводом: удобство и стиль, доступны.
Умные рулонные шторы, качества и стиля.
Изучите мир электрических рулонных штор, нажмите для подробностей.
Рулонные шторы с электроприводом для вашего интерьера, подходят для любого окна.
Электроприводные рулонные шторы: инновации в вашем доме, инновации, которые стоит попробовать.
Рулонные шторы с электроприводом для легкого управления, узнайте больше.
Электроприводные рулонные шторы: ваш лучший выбор, на нашем сайте.
Умные рулонные шторы: удобство и стиль, которое вы заслуживаете.
Преобразите ваш дом с рулонными шторами с электроприводом, предлагаемые с доставкой.
Умные рулонные шторы – правильно решайте, выбор, который вы не пожалеете.
Электроприводные рулонные шторы: удобство управления одним нажатием, носим с собой.
Умные рулонные шторы: будущее уже здесь, выберите свои.
Электрические рулонные шторы – стильный выбор, сделайте свой дом комфортнее.
Рулонные шторы с электроприводом – вашим окнам это нужно, пополните свой интерьер.
Электрические рулонные шторы: легкость управления, покупайте у нас.
Электроприводные рулонные шторы для стильного дома, закажите прямо сейчас.
рулонные шторы с электроприводом рулонные шторы с электроприводом .
займ срочно без отказа https://zajm-bez-otkaza-1.ru/ .
Наша организация оказывает профессиональные услуги грузовых перевозок по маршруту Москва — Питер с ежедневными рейсами и перевозкой от 12 часов. Мы гарантируем качественную перевозку любых типов отправлений благодаря современному автопарку и профессиональным водителям. Предлагаем конкурентные цены, полное страхование грузов и возможность мониторинга в режиме реального времени. Индивидуальный подход к каждому заказчику и удобная система льгот делают нас ответственным партнером для вашего бизнеса. Полная информация и персональные коммерческие предложения доступны на нашем ресурсе.
Мы предлагаем оформление дипломов ВУЗов по всей России и СНГ — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 3999 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом Россия — ответим быстро, без лишних формальностей.
Покупка дипломов ВУЗов в Москве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 1289 клиентов воспользовались услугой — теперь ваша очередь.
Пишите — ответим быстро, без лишних формальностей.
Покупка дипломов ВУЗов в Москве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 3063 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом о среднем образовании — ответим быстро, без лишних формальностей.
Ищете проверенного транспортировщика между Москвой и Санкт-Петербургом? Наши водители работают по этому направлению каждый день и знают его как свои пять пальцев. Понимаем, что каждый отправление важен для вашего дела, поэтому работаем к нему как к своему собственному. Справедливые тарифы без переплат, полное страхование и постоянная связь с водителем. Взаимодействуем с компаниями любого размера и всегда идем навстречу. Все условия и примеры работы смотрите на нашем сайте.
Умные рулонные шторы для вашего дома, удобство и стиль.
Современные рулонные шторы с электрическим управлением, максимальный комфорт.
Рулонные шторы с электроприводом: удобство и стиль, у нас.
Современные рулонные шторы с электроприводом, комфорта и эстетики.
Наслаждайтесь комфортом рулонных штор с электроприводом, смотрите.
Умные рулонные шторы для дома, создадут уют.
Электрические рулонные шторы: комфорт и уют, выбор, который стоит сделать.
Электрические рулонные шторы: свобода выбора, откройте для себя.
Электроприводные рулонные шторы: ваш лучший выбор, в нашем интернет-магазине.
Рулонные шторы с электроприводом для современного интерьера, которое вам понравится.
Электрические рулонные шторы – стиль и технология, предлагаемые с доставкой.
Электрические рулонные шторы для любого интерьера, выбор, на который стоит обратить внимание.
Электроприводные рулонные шторы: удобство управления одним нажатием, носим с собой.
Умные рулонные шторы: будущее уже здесь, закажите сейчас.
Умные рулонные шторы для вашего удобства, откройте для себя.
Рулонные шторы с электроприводом – вашим окнам это нужно, не упустите свой шанс.
Рулонные шторы с электроприводом для вашего комфорта, заказывайте онлайн.
Преимущества рулонных штор с электроприводом, узнайте больше.
рулонные шторы с электроприводом рулонные шторы с электроприводом .
доставка еды обеды челябинск доставка еды обеды челябинск .
заказать обед с доставкой челябинск заказать обед с доставкой челябинск .
Покупка дипломов ВУЗов по всей России и СНГ — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 1315 клиентов воспользовались услугой — теперь ваша очередь.
На этой странице — ответим быстро, без лишних формальностей.
Покупка дипломов ВУЗов в Москве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4724 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом недорого — ответим быстро, без лишних формальностей.
Покупка дипломов ВУЗов по всей России и СНГ — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 910 клиентов воспользовались услугой — теперь ваша очередь.
Узнать условия — ответим быстро, без лишних формальностей.
Покупка дипломов ВУЗов в Москве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 998 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом нового образца — ответим быстро, без лишних формальностей.
Мы предлагаем оформление дипломов ВУЗов в Москве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4989 клиентов воспользовались услугой — теперь ваша очередь.
Здесь — ответим быстро, без лишних формальностей.
Мы предлагаем оформление дипломов ВУЗов по всей России и СНГ — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 1570 клиентов воспользовались услугой — теперь ваша очередь.
Узнать условия — ответим быстро, без лишних формальностей.
Наша компания оказывает профессиональные услуги грузоперевозок по маршруту Москва — СПБ с регулярными отправками и транспортировкой от 12 часов. Мы предоставляем надежную транспортировку любых типов товаров благодаря новому подвижному составу и квалифицированным перевозчикам. Предлагаем доступные расценки, полное защиту отправлений и возможность контроля в режиме реального времени. Особый подход к каждому клиенту и удобная система льгот делают нас надежным исполнителем для вашего бизнеса. Полная информация и индивидуальные коммерческие предложения доступны на нашем портале.
дренажная система .
Рулонные шторы с электроприводом, в каждом доме.
Электроприводные рулонные шторы для вашего окна, максимальный комфорт.
Электрические рулонные шторы для вашего дома, в каталоге.
Умные рулонные шторы, отличный выбор.
Время менять окна на рулонные шторы с электроприводом, смотрите.
Умные рулонные шторы для дома, добавят стиля.
Электрические рулонные шторы: комфорт и уют, инновации, которые стоит попробовать.
Электрические рулонные шторы: свобода выбора, узнайте больше.
Электроприводные рулонные шторы: ваш лучший выбор, на нашем сайте.
Электрические рулонные шторы: удобство на каждом окне, для вашего комфорта.
Электрические рулонные шторы – стиль и технология, доступные для заказа.
Умные рулонные шторы – правильно решайте, выбор, который вы не пожалеете.
Рулонные шторы с электроприводом – ваш идеальный помощник, каждый день.
Умные рулонные шторы: будущее уже здесь, выберите свои.
Рулонные шторы с электроприводом: комфорт на новом уровне, откройте для себя.
Умные рулонные шторы с электроприводом для вашего дома, позаботьтесь о себе.
Рулонные шторы с электроприводом для вашего комфорта, покупайте у нас.
Электроприводные рулонные шторы для стильного дома, изучите сейчас.
рулонные шторы с электроприводом рулонные шторы с электроприводом .
Выполняем быструю доставку товаров между Москвой и Питером всего за 12 часов! Работаем постоянно, принимаем любые отправления — от документов до габаритных товаров. Никаких скрытых платежей, полная открытость процесса и документооборот по каждой отправке. Экономьте время и деньги, доверяя свои отправления специалистам с многолетним опытом. Оставьте заявку на нашем сайте и получите расчет стоимости в течение часа!
drenazh-fundamenta-812.ru .
Нужен надежного транспортировщика между Москвой и СПБ? Наши сотрудники курсируют по этому пути каждый день и знают его как свои пять пальцев. Понимаем, что каждый груз важен для вашего дела, поэтому подходим к нему как к своему собственному. Прозрачные цены без накруток, полное покрытие и постоянная связь с перевозчиком. Работаем с фирмами любого размера и всегда идем навстречу. Все условия и примеры работы смотрите на нашем ресурсе.
Инновационные грузоперевозки Москва-Питер нового поколения с полным контролем процесса. Умная логистика позволяет оптимизировать маршруты и уменьшать время перевозки до минимума. GPS-отслеживание, автоматические сообщения и полная аналитика по каждой отправке в личном кабинете. Прозрачное ценообразование на основе алгоритмов и оперативный расчет стоимости онлайн. Переходите в эпоху умной логистики вместе с нами — начните на нашей сервисе.
За 15 лет работы мы перевезли более 100 000 заказов по трассе Москва-Петербург без единой серьезной аварии. Партнеры предпочитают нас за надежность, пунктуальность и добросовестную работу без сюрпризов. Срочная транспортировка за 12 часов стала нашим стандартом, а не исключением. Ведущие логистические корпорации передают нам свои самые важные заказы. Станьте частью к тысячам довольных клиентов — все отзывы и кейсы на нашем портале.
Онлайн-казино для белорусов, открывайте новые возможности, порадуют вас.
Откройте для себя казино Беларуси, в любое время и в любом месте, привлекательные условия.
Выигрывайте легко в белорусских казино, лицензированные заведения, не упустите свою удачу.
Онлайн-казино, которым можно доверять, большие джекпоты.
Играйте в любимые игры в казино онлайн, от рулетки до блэкджека, для истинных ценителей.
Откройте для себя новинки в казино, лицензированные операторы.
Соберите все бонусы и акции, эксклюзивные бонусы.
Захватывающие новинки игр, уже ждут вас, откройте для себя мир азартных игр.
Советы по выбору казино, читайте наш гид.
Ваш шанс на удачу здесь, играйте ответственно.
казино онлайн казино онлайн беларусь .
керамогранит цена за м2 москва https://www.kermogranit-kupit.ru .
керамогранитная плитка для пола цена за м2 керамогранитная плитка для пола цена за м2 .
Косметологические курсы обучение инъекционной косметологии обучение с нуля, теоретическая база и отработка на моделях. Современные методики, лицензия, выдача сертификатов. Старт карьеры в бьюти-индустрии!
Косметологические курсы медикал кейс обучение с нуля, теоретическая база и отработка на моделях. Современные методики, лицензия, выдача сертификатов. Старт карьеры в бьюти-индустрии!
раскрутка сео сайта заказать сео сайта
сео раскрутка заказать заказать сео сайт
яндекс директ купить контекстная реклама услуги специалистов
Наша компания оказывает качественные услуги грузоперевозок по направлению Москва — Питер с ежедневными поездками и доставкой от 12 часов. Мы гарантируем безопасную перевозку любых типов товаров благодаря современному автопарку и опытным водителям. Предлагаем выгодные тарифы, полное страхование отправлений и возможность контроля в режиме реального времени. Особый подход к каждому партнеру и гибкая система бонусов делают нас ответственным партнером для вашего бизнеса. Детальная информация и специальные коммерческие предложения доступны на нашем сайте.
Шторы для больших окон: римский стиль, идеальный выбор.
Придайте интерьеру изысканность, созданными для вашего пространства.
для больших окон.
Как выбрать римские шторы для больших окон, получите советы.
в одном дизайне.
Создайте уникальный стиль.
Все о римских шторах для больших окон, посетите наш сайт.
рекомендации по выбору римских штор, для создания идеального уюта.
Секреты выбора римских штор для больших окон, создавайте неповторимый интерьер.
для комфортного пространства.
Создайте комфорт с римскими шторами, проверьте наш ассортимент.
Как украсить окна римскими шторами, посмотрите примеры.
Шторы для вашего стиля, лучшие варианты на рынке.
Шторы, которые преобразят ваше пространство, создавайте уют в вашем доме.
Оформите окна стильно, с этими римскими шторами.
Идеальные шторы для вашего дома, используйте в своем интерьере.
Элегантные римские шторы: ваш шаг к идеальному дому, посмотрите новинки.
Как римские шторы меняют интерьер, читайте наши советы.
Преимущества римских штор для больших окон, открывайте новые решения.
Легкость и элегантность римских штор, для вашего пространства.
римская штора на большое окно римская штора на большое окно .
анализ сайта заказать сео сайт
Косметологические курсы медикал кейс обучение с нуля, теоретическая база и отработка на моделях. Современные методики, лицензия, выдача сертификатов. Старт карьеры в бьюти-индустрии!
iflow купить citadel-trade.ru .
металлические значки на заказ москва металлические значки на заказ москва .
Выполняем оперативную доставку отправлений между Москвой и СПБ всего за 12 часов! Действуем постоянно, принимаем любые товары — от документов до крупногабаритных товаров. Никаких скрытых платежей, полная открытость процесса и отчетность по каждой доставке. Сберегайте время и деньги, поручая свои грузы специалистам с солидным опытом. Оставьте заявку на нашем сайте и получите смету стоимости в течение часа!
Как легко выбрать римские шторы в салоне
почему римские шторы в салоне лучше чем покупать готовые почему римские шторы в салоне лучше чем покупать готовые .
Требуется надежного транспортировщика между Москвой и СПБ? Наши ребята ездят по этому направлению каждый день и знают его как свои пять пальцев. Знаем, что каждый груз важен для вашего дела, поэтому относимся к нему как к своему собственному. Справедливые тарифы без накруток, полное защиту и постоянная связь с курьером. Взаимодействуем с организациями любого размера и всегда идем навстречу. Все условия и примеры работы смотрите на нашем ресурсе.
Плюсы индивидуальных римских штор
почему римские шторы в салоне лучше чем покупать готовые почему римские шторы в салоне лучше чем покупать готовые .
Современные логистические услуги Москва-СПБ нового поколения с полным мониторингом процесса. Продвинутая логистика позволяет оптимизировать направления и сокращать время доставки до минимума. GPS-мониторинг, автоматические оповещения и подробная аналитика по каждой отправке в личном кабинете. Открытое формирование цен на основе алгоритмов и оперативный расчет стоимости онлайн. Переходите в эпоху умной логистики вместе с нами — начните на нашей системе.
За 15 лет работы мы доставили более 100 000 отправлений по направлению Москва-Санкт-Петербург без единой серьезной аварии. Заказчики выбирают нас за стабильность, своевременность и честную работу без сюрпризов. Быстрая перевозка за 12 часов стала нашим нормой, а не исключением. Большие транспортные фирмы передают нам свои самые важные заказы. Войдите в число к тысячам довольных партнеров — все отзывы и кейсы на нашем сайте.
Мы предлагаем оформление дипломов ВУЗов по всей России и СНГ — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 1612 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом Россия — ответим быстро, без лишних формальностей.
Оформиление дипломов ВУЗов по всей России и СНГ — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4050 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом Москва — ответим быстро, без лишних формальностей.
Наша организация выполняет надежные услуги грузоперевозок по направлению Москва — Питер с регулярными рейсами и перевозкой от 12 часов. Мы обеспечиваем надежную транспортировку любых типов отправлений благодаря обновленному подвижному составу и квалифицированным шоферам. Предлагаем конкурентные тарифы, полное покрытие товаров и возможность контроля в режиме реального времени. Персональный подход к каждому клиенту и удобная система скидок делают нас ответственным партнером для вашего бизнеса. Подробная информация и индивидуальные коммерческие предложения доступны на нашем портале.
Мы предлагаем оформление дипломов ВУЗов по всей России и СНГ — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 2198 клиентов воспользовались услугой — теперь ваша очередь.
Уточнить здесь — ответим быстро, без лишних формальностей.
Требуется надежного перевозчика между Москвой и Питером? Наши сотрудники курсируют по этому направлению каждый день и знают его как свои пять пальцев. Понимаем, что каждый отправление важен для вашего дела, поэтому работаем к нему как к своему собственному. Прозрачные тарифы без завышений, полное страхование и постоянная связь с курьером. Взаимодействуем с организациями любого размера и всегда идем навстречу. Все условия и примеры работы смотрите на нашем ресурсе.
мостбет вход сегодня https://mostbet11011.ru/
Цифровые грузоперевозки Москва-Питер нового поколения с полным мониторингом процесса. Интеллектуальная логистика позволяет улучшать пути и минимизировать время перевозки до минимума. GPS-контроль, автоматические уведомления и детальная аналитика по каждой перевозке в личном кабинете. Открытое ценообразование на основе алгоритмов и мгновенный расчет стоимости онлайн. Переходите в эпоху умной логистики вместе с нами — начните на нашей системе.
Гороскоп https://www.85goelro.ru .
новости дня http://www.tti-sfedu.ru .
За 15 лет работы мы доставили более 100 000 заказов по направлению Москва-Петербург без единой серьезной аварии. Партнеры выбирают нас за постоянство, своевременность и открытую работу без сюрпризов. Быстрая перевозка за 12 часов стала нашим стандартом, а не исключением. Большие логистические фирмы доверяют нам свои самые важные грузы. Войдите в число к тысячам довольных клиентов — все отзывы и кейсы на нашем портале.
Погода http://www.actprom.ru .
Наша организация выполняет надежные услуги грузоперевозок по направлению Москва — Питер с постоянными поездками и доставкой от 12 часов. Мы предоставляем качественную доставку любых типов товаров благодаря новому автотранспорту и квалифицированным перевозчикам. Предлагаем конкурентные расценки, полное страхование грузов и возможность отслеживания в режиме реального времени. Индивидуальный подход к каждому клиенту и гибкая система скидок делают нас ответственным партнером для вашего бизнеса. Подробная информация и персональные коммерческие предложения доступны на нашем ресурсе.
Элегантные решения, рулонные шторы с электроприводом, в одном клике.
Современный дизайн, умные рулонные шторы, доступные цены.
Управляйте светом, с автоматическими шторами, с удовольствием.
Шторы, которые меняют все, узнайте здесь.
Электрические шторы, это удобно, упрощайте свою жизнь.
Шторы, которые управляются дистанционно, для современных решений, закажите с доставкой.
Шторы с умным управлением, высокая функциональность, сделайте правильный выбор.
Современные рулонные шторы, доступная цена, узнайте подробности.
Идеальные рулонные шторы, отличный выбор, в наличии сейчас.
Автоматизированные шторы, для каждого дома, обратитесь к нам.
Шторы, которые открывают новые возможности, стиль и комфорт, доступно с доставкой.
Дистанционно управляемые шторы, как выбрать?.
Сделайте ваш дом умным, с рулонными шторами с электроприводом, это практично.
Современные шторы с пультом, широкий ассортимент, закажите онлайн.
Умный дом с рулонными шторами, дизайн и комфорт, консультация специалиста.
Электрические шторы для любого интерьера, простой и удобный выбор, закажите с доставкой.
Удобные рулонные шторы, доступные цены, выбор за вами.
Шторы с электроприводом, для стильного интерьера, узнайте цены.
рулонные шторы с электроприводом и дистанционным управлением рулонные шторы с электроприводом и дистанционным управлением .
Нужен проверенного логиста между Москвой и СПБ? Наши ребята курсируют по этому маршруту каждый день и знают его как свои пять пальцев. Осознаем, что каждый отправление важен для вашего дела, поэтому работаем к нему как к своему собственному. Прозрачные цены без переплат, полное страхование и постоянная связь с водителем. Работаем с компаниями любого размера и всегда идем навстречу. Все условия и примеры работы смотрите на нашем ресурсе.
Календарь стрижек https://www.istoriamashin.ru .
Покупка дипломов ВУЗов по всей России и СНГ — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 2275 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом Москва — ответим быстро, без лишних формальностей.
Элегантные решения, в вашем интерьере, инновационное решение.
Идеальное сочетание, в различных цветах, долговечность и надежность.
Добавьте комфорта, с рулонными шторами с электроприводом, с удовольствием.
Электропривод для вашего уюта, почему стоит выбрать?.
Шторы с дистанционным управлением, это красиво, упрощайте свою жизнь.
Рулонные шторы с электроприводом, для современных решений, попробуйте прямо сейчас.
Шторы с умным управлением, высокая функциональность, сделайте правильный выбор.
Современные рулонные шторы, удобное управление, закажите сегодня.
Шторы, с которыми легко управлять, отличный выбор, в наличии сейчас.
Рулонные шторы с дистанционным управлением, для вашего комфортного быта, узнайте больше.
Автоматические рулонные шторы, стиль и комфорт, закажите с нашим менеджером.
Электроприводные рулонные шторы, узнайте о преимуществах.
Управляйте светом, с рулонными шторами с электроприводом, это легко.
Современные шторы с пультом, высокое качество, узнайте подробности.
Электропривод для рулонных штор, современные технологии, консультация специалиста.
Выбор рулонных штор с электроприводом, простой и удобный выбор, посетите наш сайт.
Удобные рулонные шторы, высокое качество, закажите онлайн.
Шторы с электроприводом, для любого помещения, узнайте цены.
рулонные шторы с электроприводом и дистанционным управлением рулонные шторы с электроприводом и дистанционным управлением .
Цифровые логистические услуги Москва-Санкт-Петербург нового поколения с полным мониторингом процесса. Продвинутая логистика позволяет улучшать направления и сокращать время транспортировки до минимума. GPS-контроль, автоматические уведомления и полная аналитика по каждой отправке в личном кабинете. Открытое формирование цен на основе алгоритмов и мгновенный расчет стоимости онлайн. Переходите в эпоху умной логистики вместе с нами — начните на нашей системе.
Покупка дипломов ВУЗов по всей России и СНГ — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 3597 клиентов воспользовались услугой — теперь ваша очередь.
http://poligraf8.ru/ — ответим быстро, без лишних формальностей.
Мы предлагаем оформление дипломов ВУЗов по всей России и СНГ — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4782 клиентов воспользовались услугой — теперь ваша очередь.
Дипломы о высшем образовании купить — ответим быстро, без лишних формальностей.
Оформиление дипломов ВУЗов по всей России и СНГ — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 2662 клиентов воспользовались услугой — теперь ваша очередь.
Узнать подробнее — ответим быстро, без лишних формальностей.
Мы предлагаем оформление дипломов ВУЗов по всей России и СНГ — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 3818 клиентов воспользовались услугой — теперь ваша очередь.
Диплом цена — ответим быстро, без лишних формальностей.
За 15 лет работы мы доставили более 100 000 заказов по трассе Москва-Петербург без единой серьезной аварии. Заказчики выбирают нас за надежность, своевременность и честную работу без сюрпризов. Быстрая перевозка за 12 часов стала нашим стандартом, а не исключением. Ведущие логистические корпорации доверяют нам свои самые важные заказы. Войдите в число к тысячам довольных заказчиков — все отзывы и кейсы на нашем сайте.
Мы предлагаем оформление дипломов ВУЗов по всей России и СНГ — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 2941 клиентов воспользовались услугой — теперь ваша очередь.
Дипломы о высшем образовании купить — ответим быстро, без лишних формальностей.
Наша компания оказывает надежные услуги грузовых перевозок по трассе Москва — СПБ с регулярными рейсами и перевозкой от 12 часов. Мы предоставляем надежную перевозку любых типов грузов благодаря современному автотранспорту и квалифицированным перевозчикам. Предлагаем конкурентные цены, полное защиту грузов и возможность отслеживания в режиме реального времени. Особый подход к каждому партнеру и удобная система скидок делают нас надежным поставщиком услуг для вашего бизнеса. Подробная информация и индивидуальные коммерческие предложения доступны на нашем ресурсе.
Мы предлагаем оформление дипломов ВУЗов в Москве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 2796 клиентов воспользовались услугой — теперь ваша очередь.
Мы поможем — ответим быстро, без лишних формальностей.
Какой сегодня церковный праздник http://www.pechory-online.ru .
pristennyj-drenazh-812.ru .
Ищете надежного логиста между Москвой и СПБ? Наши водители ездят по этому пути каждый день и знают его как свои пять пальцев. Осознаем, что каждый груз важен для вашего дела, поэтому работаем к нему как к своему собственному. Справедливые расценки без накруток, полное покрытие и постоянная связь с перевозчиком. Сотрудничаем с компаниями любого размера и всегда идем навстречу. Все условия и примеры работы смотрите на нашем ресурсе.
шизофрения психиатрическая клиника шизофрения психиатрическая клиника .
Мы предлагаем оформление дипломов ВУЗов в Москве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4120 клиентов воспользовались услугой — теперь ваша очередь.
Посмотреть информацию — ответим быстро, без лишних формальностей.
Сшить римские шторы на заказ, в отличном качестве.
Нужны римские шторы?, шторы.
Как сшить римские шторы под заказ, гарантией качества.
Лучшие римские шторы на заказ, по индивидуальному заказу.
Откройте для себя мир римских штор, по.
Индивидуальное изготовление римских штор, в удобное время.
Заказ римских штор по индивидуальным размерам, всегда.
Изготавливаем римские шторы для любого стиля, это просто.
Полезные советы по выбору римских штор, с нашим ассортиментом.
Уникальные римские шторы на заказ, с доставкой на дом.
Сшить римские шторы легко, читайте.
Римские шторы как решение для любого окна, доступно.
Индивидуальный подход к изготовлению римских штор, в.
Римские шторы на заказ для вашего комфорта, индивидуальным проектам.
Римские шторы по вашему дизайну, по индивидуальным расчетам.
Как правильно сшить римские шторы по размеру, в интернет-магазине.
Римские шторы под заказ – это красиво, легко.
Римские шторы, сделанные на заказ, сто процентов.
сшить римские шторы на заказ сшить римские шторы на заказ .
психиатрический центр нижний новгород психиатрический центр нижний новгород .
Наша фирма оказывает качественные услуги грузоперевозок по трассе Москва — СПБ с ежедневными отправками и транспортировкой от 12 часов. Мы обеспечиваем надежную доставку любых типов грузов благодаря новому подвижному составу и квалифицированным водителям. Предлагаем выгодные расценки, полное защиту грузов и возможность контроля в режиме реального времени. Персональный подход к каждому партнеру и выгодная система бонусов делают нас надежным исполнителем для вашего бизнеса. Подробная информация и индивидуальные коммерческие предложения доступны на нашем ресурсе.
Покупка дипломов ВУЗов в Москве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 2397 клиентов воспользовались услугой — теперь ваша очередь.
Перейти — ответим быстро, без лишних формальностей.
Требуется проверенного логиста между Москвой и СПБ? Наши ребята курсируют по этому пути каждый день и знают его как свои пять пальцев. Знаем, что каждый отправление важен для вашего дела, поэтому работаем к нему как к своему собственному. Справедливые тарифы без переплат, полное покрытие и постоянная связь с перевозчиком. Работаем с организациями любого размера и всегда идем навстречу. Все условия и примеры работы смотрите на нашем ресурсе.
За 15 лет работы мы перевезли более 100 000 заказов по трассе Москва-Петербург без единой серьезной аварии. Партнеры доверяют нас за надежность, своевременность и открытую работу без сюрпризов. Быстрая перевозка за 12 часов стала нашим стандартом, а не исключением. Крупные логистические компании передают нам свои самые важные грузы. Станьте частью к тысячам довольных заказчиков — все отзывы и кейсы на нашем сайте.
Какой сегодня праздник https://pechory-online.ru/ .
Организуем быструю доставку отправлений между Москвой и СПБ всего за 12 часов! Работаем каждый день, перевозим любые товары — от документов до больших товаров. Никаких скрытых оплат, полная открытость процесса и контроль по каждой доставке. Экономьте время и деньги, передавая свои грузы специалистам с большим опытом. Оставьте заявку на нашем сайте и получите калькуляцию стоимости в течение часа!
the pokies pokiesnet250.com .
Выполняем скоростную перевозку отправлений между Москвой и СПБ всего за 12 часов! Функционируем каждый день, берем любые товары — от документов до габаритных товаров. Никаких скрытых платежей, полная честность процесса и контроль по каждой отправке. Экономьте время и деньги, поручая свои грузы экспертам с большим опытом. Оставьте заявку на нашем ресурсе и получите смету стоимости в течение часа!
Покупка дипломов ВУЗов по всей России и СНГ — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 3671 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом о среднем образовании — ответим быстро, без лишних формальностей.
Мы предлагаем оформление дипломов ВУЗов в Москве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 1950 клиентов воспользовались услугой — теперь ваша очередь.
Посмотреть информацию — ответим быстро, без лишних формальностей.
За 15 лет работы мы доставили более 100 000 грузов по трассе Москва-Санкт-Петербург без единой серьезной аварии. Заказчики предпочитают нас за надежность, точность и честную работу без сюрпризов. Срочная транспортировка за 12 часов стала нашим нормой, а не исключением. Ведущие грузовые корпорации передают нам свои самые важные грузы. Войдите в число к тысячам довольных клиентов — все отзывы и кейсы на нашем ресурсе.
Создайте уникальные шторы под заказ для вашего дома, дизайн.
Индивидуальный подход к шторным решениям, подчеркивает вашу индивидуальность.
Закажите шторы на заказ и обновите свой интерьер, действуйте уже сегодня.
Шторы на заказ — сочетание качества и стиля, всегда в наличии.
Уникальные шторы, которые подчеркнут вашу индивидуальность, доверяйте профессионалам.
Шторы на заказ для вашего уютного дома, добавьте стиль.
Найдите идеальные шторы, сделанные только для вас, действуйте и наслаждайтесь результатом.
Шторы на заказ — для настоящих ценителей комфорта, выберите свой стиль.
Функциональные шторы под заказ для вашего удобства, ознакомьтесь с нашим каталогом.
Шторы, которые идеально впишутся в ваш дом, действуйте и вдохновляйтесь.
шторы на заказ шторы на заказ .
Мы предлагаем оформление дипломов ВУЗов в Москве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 3075 клиентов воспользовались услугой — теперь ваша очередь.
Посмотреть информацию — ответим быстро, без лишних формальностей.
Мы предлагаем оформление дипломов ВУЗов в Москве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4206 клиентов воспользовались услугой — теперь ваша очередь.
На этой странице — ответим быстро, без лишних формальностей.
Мы предлагаем оформление дипломов ВУЗов в Москве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4535 клиентов воспользовались услугой — теперь ваша очередь.
Обращайтесь — ответим быстро, без лишних формальностей.
Купить рулонные электрошторы, для вашего дома, современные технологии.
Электрошторы: идеальное решение, для любого интерьера.
Как выбрать рулонные электрошторы?, функциональность и стиль.
Рулонные электрошторы: удобство и стиль, инновационные технологии.
Рулонные электрошторы: стиль и функциональность, простота управления.
Рулонные электрошторы для любых окон, доступные цены.
Эстетика и практичность электроштор, идеальное решение для любой комнаты.
Как установить рулонные электрошторы, пошаговое руководство.
Рулонные электрошторы как элемент декора, интеллектуальные решения.
Рулонные электрошторы: для бизнеса и дома, организация пространства.
Электрошторы: решение для вашего окна, практичность и стиль.
Зачем купить рулонные электрошторы?, выбор цвета.
Электрошторы для идеального освещения, простота управления.
Дизайн и функциональность рулонных электроштор, интерьер в стиле минимализм.
Как рулонные электрошторы улучшают интерьер, простота установки.
Электрошторы: идеальное решение для окон, подбор стиля.
Рулонные электрошторы: удобство и комфорт, функциональность и стиль.
Как электрошторы меняют пространство, варианты управления.
Электрошторы: идеальный выбор для вашего дома, простой монтаж.
Рулонные электрошторы: ваш стильный акцент, функциональность и комфорт.
автоматическая рулонная штора автоматическая рулонная штора .
Нужен надежного перевозчика между Москвой и Санкт-Петербургом? Наши ребята ездят по этому пути каждый день и знают его как свои пять пальцев. Знаем, что каждый товар важен для вашего дела, поэтому подходим к нему как к своему собственному. Справедливые цены без переплат, полное страхование и постоянная связь с перевозчиком. Взаимодействуем с фирмами любого размера и всегда идем навстречу. Все условия и примеры работы смотрите на нашем портале.
Купить рулонные электрошторы, для вашего дома, отличное качество.
Электрошторы: идеальное решение, современный дизайн.
Что учесть при покупке электроштор?, разнообразие моделей.
Электрошторы: преимущества рулонного типа, долговечность и практичность.
Рулонные электрошторы: стиль и функциональность, разнообразие расцветок.
Электрошторы: ваш лучший выбор, высокое качество.
Эстетика и практичность электроштор, защита от солнечных лучей.
Электрошторы для кухни и спальни, доступные инструкции.
Современные технологии в рулонных электрошторах, интеллектуальные решения.
Эстетика и функциональность электроштор, долговечность эксплуатации.
Электрошторы: решение для вашего окна, уникальные предложения.
Рулонные электрошторы для современного интерьера, выбор цвета.
Рулонные электрошторы: ваш уютный уголок, легкость в уходе.
Дизайн и функциональность рулонных электроштор, интерьер в стиле минимализм.
Электрошторы для вашего стиля, разнообразие функций.
Электрошторы: идеальное решение для окон, практические советы.
Электрошторы: создайте атмосферу уюта, функциональность и стиль.
Рулонные электрошторы: ваш надежный помощник, варианты управления.
Рулонные электрошторы для создания уюта, простой монтаж.
Рулонные электрошторы: ваш стильный акцент, функциональность и комфорт.
автоматическая рулонная штора автоматическая рулонная штора .
Наша организация выполняет надежные услуги доставки грузов по маршруту Москва — Питер с регулярными поездками и транспортировкой от 12 часов. Мы предоставляем качественную доставку любых типов товаров благодаря обновленному подвижному составу и профессиональным водителям. Предлагаем конкурентные тарифы, полное защиту грузов и возможность мониторинга в режиме реального времени. Индивидуальный подход к каждому заказчику и гибкая система льгот делают нас надежным исполнителем для вашего бизнеса. Детальная информация и специальные коммерческие предложения доступны на нашем портале.
Элегантные автоматические рулонные шторы для вашего дома, узнать.
Как выбрать автоматическую рулонную штору, чтобы.
Автоматические рулонные шторы: идеальное решение для окон, на нашем сайте.
Создайте уют с автоматическими рулонными шторами, у нас.
Преимущества умного управления рулонными шторами, нашими услугами.
Как ухаживать за автоматическими рулонными шторами, для того чтобы.
Автоматические рулонные шторы в интерьере: тренды 2023 года, познакомьтесь.
Автоматизированные рулонные шторы: что нужно знать, прочитайте.
Автоматические рулонные шторы: сочетание функциональности и дизайна, посмотрите наш каталог.
Лучшие решения для окон — автоматические рулонные шторы, ознакомьтесь.
Обновите ваш дом с помощью автоматических рулонных штор, сегодня.
Советы по использованию автоматических рулонных штор для оптимального освещения, узнайте больше.
Технологии автоматических рулонных штор: как это работает, с нашими материалами.
Дизайн и функциональность: автоматические рулонные шторы, с идеями.
Как выбрать лучший бренд автоматических рулонных штор, узнайте.
Автоматические рулонные шторы: идеальное дополнение к вашему интерьеру, из нашего ассортимента.
Энергоэффективные решения для окон: автоматические рулонные шторы, изучите.
Советы по выбору автоматических рулонных штор для офисов, узнайте.
Где купить качественные автоматические рулонные шторы, с нашими рекомендациями.
Автоматические рулонные шторы для гостиниц и ресторанов, в нашем каталоге.
автоматическая рулонная штора автоматическая рулонная штора .
New AI generator nsfw ai generator of the new generation: artificial intelligence turns text into stylish and realistic image and videos.
Организуем быструю транспортировку грузов между Москвой и Питером всего за 12 часов! Работаем постоянно, берем любые отправления — от документов до больших товаров. Никаких скрытых оплат, полная честность процесса и отчетность по каждой доставке. Сберегайте время и деньги, доверяя свои отправления профессионалам с солидным опытом. Оставьте заявку на нашем сайте и получите расчет стоимости в течение часа!
1win crash https://1win11005.com
Ищете надежного логиста между Москвой и СПБ? Наши ребята работают по этому направлению каждый день и знают его как свои пять пальцев. Знаем, что каждый отправление важен для вашего дела, поэтому подходим к нему как к своему собственному. Справедливые расценки без накруток, полное покрытие и постоянная связь с водителем. Взаимодействуем с фирмами любого размера и всегда идем навстречу. Все условия и примеры работы смотрите на нашем сайте.
Автоматические рулонные шторы для вашего дома, функциональность и современность.
Рулонные шторы с электроприводом, современные технологии для вашего комфорта.
Электронные рулонные шторы для вашего пространства, функциональность.
Лучшая автоматизация окон, без лишних усилий.
Как выбрать электрические рулонные шторы, для вашего интерьера.
Элегантность и технологии в рулонных шторах, по доступной цене.
Инновационные электрические рулонные шторы, для создания стильного пространства.
Лучшие модели электрических рулонных штор, для вашего дома.
Технология автоматизации рулонных штор, добавляет удобства.
Топ моделей электрических рулонных штор, в идеальном сочетании.
Почему стоит выбрать электрические шторы, для вашего уюта.
Электрические рулонные шторы: все, что нужно знать, в вашем доме.
Как правильно выбрать рулонные шторы, в надежных магазинах.
Электрические рулонные шторы: функциональность и стиль, для создания уюта.
Электрические рулонные шторы: преимущества, для улучшения качества жизни.
Как установить электрические рулонные шторы, всегда под контролем.
Электрические рулонные шторы: идеальные решения, для практичного использования.
Электронные решения для коммерческих помещений, для удобства сотрудников.
Обзор рулонных штор с электроприводом, для вашего офиса.
электрические рулонные шторы на окна электрические рулонные шторы на окна .
Электрические рулонные шторы на окна, функциональность и современность.
Рулонные шторы с электроприводом, современные технологии для вашего комфорта.
Электронные рулонные шторы для вашего пространства, в каждом элементе.
Лучшая автоматизация окон, все под контролем.
Советы по выбору ролл-штор, для создания уюта.
Элегантность и технологии в рулонных шторах, по доступной цене.
Электрические шторы: комфортный выбор, доступные для любого интерьера.
Рекомендации по выбору рулонных штор, для функционального пространства.
Технология автоматизации рулонных штор, облегчает вашу жизнь.
Самые популярные электрические рулонные шторы, в идеальном сочетании.
Преимущества автоматических рулонных штор, для создания неповторимого стиля.
Электрические рулонные шторы: все, что нужно знать, для вашего стиля.
Где купить рулонные шторы с электроприводом?, в надежных магазинах.
Электрические рулонные шторы: функциональность и стиль, для создания уюта.
Электрические рулонные шторы: обзор и советы, для улучшения качества жизни.
Электрические рулонные шторы: монтаж, с соблюдением всех стандартов.
Электрические рулонные шторы: идеальные решения, для практичного использования.
Электронные решения для коммерческих помещений, для удобства сотрудников.
Электрические шторы: экономия и комфорт, для вашего офиса.
электрические рулонные шторы на окна электрические рулонные шторы на окна .
1win prediction http://1win11005.com/
Наша компания предоставляет качественные услуги грузовых перевозок по маршруту Москва — СПБ с ежедневными поездками и перевозкой от 12 часов. Мы гарантируем безопасную транспортировку любых типов грузов благодаря современному автотранспорту и квалифицированным перевозчикам. Предлагаем выгодные расценки, полное защиту товаров и возможность отслеживания в режиме реального времени. Индивидуальный подход к каждому заказчику и выгодная система скидок делают нас ответственным партнером для вашего бизнеса. Подробная информация и специальные коммерческие предложения доступны на нашем портале.
iflow https://citadel-trade.ru/ .
карниз с приводом http://www.elektrokarniz90.ru .
Требуется надежного транспортировщика между Москвой и Питером? Наши ребята работают по этому пути каждый день и знают его как свои пять пальцев. Знаем, что каждый груз важен для вашего дела, поэтому относимся к нему как к своему собственному. Прозрачные расценки без накруток, полное покрытие и постоянная связь с курьером. Взаимодействуем с компаниями любого размера и всегда идем навстречу. Все условия и примеры работы смотрите на нашем сайте.
окна на заказ окна на заказ .
Цифровые грузоперевозки Москва-СПБ нового поколения с полным управлением процесса. Интеллектуальная логистика позволяет совершенствовать маршруты и сокращать время доставки до минимума. GPS-контроль, автоматические оповещения и полная аналитика по каждой отправке в личном кабинете. Открытое ценообразование на основе алгоритмов и быстрый расчет стоимости онлайн. Переходите в эпоху умной логистики вместе с нами — начните на нашей платформе.
дренаж дома под ключ цена .
водосток для отмостки .
дренаж цена спб .
Выполняем оперативную перевозку грузов между Москвой и Санкт-Петербургом всего за 12 часов! Функционируем ежедневно, перевозим любые товары — от документов до крупногабаритных товаров. Никаких скрытых платежей, полная прозрачность процесса и документооборот по каждой отправке. Экономьте время и деньги, передавая свои отправления специалистам с большим опытом. Оставьте заявку на нашем портале и получите калькуляцию стоимости в течение часа!
Мы предлагаем оформление дипломов ВУЗов в Москве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 1122 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом нового образца — ответим быстро, без лишних формальностей.
Мы предлагаем оформление дипломов ВУЗов в Москве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4231 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом института — ответим быстро, без лишних формальностей.
Покупка дипломов ВУЗов в Москве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 3917 клиентов воспользовались услугой — теперь ваша очередь.
Перейти — ответим быстро, без лишних формальностей.
Мы предлагаем оформление дипломов ВУЗов в Москве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 2429 клиентов воспользовались услугой — теперь ваша очередь.
Сайт компании — ответим быстро, без лишних формальностей.
Цифровые грузоперевозки Москва-СПБ нового поколения с полным мониторингом процесса. Умная логистика позволяет совершенствовать направления и сокращать время перевозки до минимума. GPS-контроль, автоматические уведомления и детальная аналитика по каждой доставке в личном кабинете. Честное тарификация на основе алгоритмов и быстрый расчет стоимости онлайн. Переходите в эпоху умной логистики вместе с нами — начните на нашей платформе.
Оформиление дипломов ВУЗов по всей России и СНГ — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 1847 клиентов воспользовались услугой — теперь ваша очередь.
Здесь — ответим быстро, без лишних формальностей.
Покупка дипломов ВУЗов в Москве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 2035 клиентов воспользовались услугой — теперь ваша очередь.
http://spbrcom13.ru/ — ответим быстро, без лишних формальностей.
рулонные шторы купить москва http://www.elektricheskie-rulonnye-shtory77.ru/ .
значки пины на заказ https://www.znacki-na-zakaz.ru .
профессиональные прогнозы на спорт http://www.kompyuternye-prognozy-na-futbol1.ru/ .
устройство дренажа спб .
Here’s more on the topic https://my-caffe.ru/
Оформиление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 3357 клиентов воспользовались услугой — теперь ваша очередь.
По ссылке — ответим быстро, без лишних формальностей.
Thanks for the article. Here’s more on the topic https://adventime.ru/
servicios de la cl?nica de cosmetolog?a en Marbella http://www.clinics-marbella-1.com .
окна пвх рехау https://okna177.ru/ .
Мы предлагаем оформление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 1082 клиентов воспользовались услугой — теперь ваша очередь.
Мы поможем — ответим быстро, без лишних формальностей.
Мы предлагаем оформление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 3353 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом о высшем образовании недорого — ответим быстро, без лишних формальностей.
пластиковые окна с доставкой https://02stroika.ru/ .
Мы предлагаем оформление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4641 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом об образовании — ответим быстро, без лишних формальностей.
Мы предлагаем оформление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 1822 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом о образовании недорого — ответим быстро, без лишних формальностей.
chicken road
Chicken Road: Real Player Feedback
Chicken Road stands out as a gambling game with arcade vibes, attracting users with its easytograsp gameplay, high RTP (98%), and distinctive cashout system. We’ve gathered real player reviews to determine if it’s worth your time.
What Players Like
Many users praise Chicken Road for its fastpaced gameplay and ease of use. The ability to cash out at any time adds a strategic twist, while the high RTP makes it feel fairer than traditional slots. The demo mode is a hit with beginners, allowing players to test the game riskfree. Mobile optimization also gets high marks, as the game runs smoothly even on older devices.
Melissa R., AU: “Surprisingly fun and fair! The cashout feature adds strategy.”
Nathan K., UK: “The arcade style is refreshing. Runs smoothly on my tablet.”
The bright, nostalgic visuals add to the fun factor, keeping players hooked.
Drawbacks
However, Chicken Road isn’t perfect, and there are a few issues worth noting. Certain players think the game is too predictable and doesn’t offer much variety. Some highlight sluggish customer service and a lack of additional options. Misleading ads are another issue, with many assuming it was an arcade game instead of a gambling app.
Tom B., US: “It starts off fun, but the monotony sets in quickly.”
Sam T., UK: “Promoted as entertainment, yet it turns out to be a gambling product.”
Advantages and Disadvantages
Pros
Simple, fastpaced gameplay
An RTP of 98% guarantees a fair experience
Free demo option for beginners to test the waters
Smooth performance on mobile devices
Negative Aspects
Gameplay can feel repetitive
Limited variety and features
Customer service can be sluggish and unreliable
Deceptive advertising
Final Verdict
Chicken Road shines through its openness, impressive RTP, and ease of access. Ideal for casual gamers or anyone just starting with online gambling. Still, the heavy emphasis on luck and minimal complexity could turn off some users. To maximize enjoyment, stick to authorized, regulated sites.
Rating: 4/5
A fair and entertaining choice, but not without room for improvement.
Создайте уникальные шторы под заказ для вашего дома, подберите.
Шторы на заказ для любого интерьера, открывает новые горизонты.
Шторы на заказ — это просто, быстро и удобно, не упустите возможность.
Качественные шторы на заказ по доступной цене, всегда в наличии.
Уникальные шторы, которые подчеркнут вашу индивидуальность, доверяйте профессионалам.
Индивидуальные шторы на заказ от лучших дизайнеров, усилите атмосферу.
Достаньте самовыражение через шторы на заказ, не откладывайте на потом.
Индивидуальный подход к созданию штор под заказ, измените свой интерьер навсегда.
Функциональные шторы под заказ для вашего удобства, ознакомьтесь с нашим каталогом.
Шторы на заказ — это легко и удобно, действуйте и вдохновляйтесь.
шторы на заказ шторы на заказ .
прогнозы на чемпионат мира по хоккею http://www.luchshie-prognozy-na-khokkej.ru .
прогнозы на хоккей от экспертов luchshie-prognozy-na-khokkej1.ru .
хоккейные прогнозы на сегодня http://luchshie-prognozy-na-khokkej2.ru .
прогноз игр по футболу https://kompyuternye-prognozy-na-futbol2.ru .
Электрошторы рулонного типа, инновации, доступные цены.
Электрошторы: идеальное решение, современный дизайн.
Что учесть при покупке электроштор?, разнообразие моделей.
Электрошторы для защиты от солнца, инновационные технологии.
Секреты выбора рулонных электроштор, разнообразие расцветок.
Рулонные электрошторы для любых окон, высокое качество.
Эстетика и практичность электроштор, защита от солнечных лучей.
Рулонные электрошторы на любой вкус, пошаговое руководство.
Современные технологии в рулонных электрошторах, интеллектуальные решения.
Рулонные электрошторы: для бизнеса и дома, организация пространства.
Как выбрать идеальные электрошторы?, практичность и стиль.
Рулонные электрошторы для современного интерьера, доступность материалов.
Рулонные электрошторы: ваш уютный уголок, простота управления.
Дизайн и функциональность рулонных электроштор, советы по оформлению.
Электрошторы для вашего стиля, простота установки.
Рулонные электрошторы: ваш новый стиль, разнообразие моделей.
Электрошторы: создайте атмосферу уюта, технологические преимущества.
Рулонные электрошторы: ваш надежный помощник, экологичные материалы.
Электрошторы: идеальный выбор для вашего дома, простой монтаж.
Рулонные электрошторы: ваш стильный акцент, современные технологии.
автоматическая рулонная штора автоматическая рулонная штора .
drenazh-10-sotok-812.ru .
окна рехау окна рехау .
drenazh-10-sotok-812.ru .
заказать окна заказать окна .
Преимущества автоматических рулонных штор в интерьере, ознакомиться.
Топ-5 советов по выбору автоматических рулонных штор, чтобы.
Зачем нужны автоматические рулонные шторы в вашем доме, на платформе.
Преобразите свой дом с автоматическими рулонными шторами, в нашем магазине.
Легкость управления автоматическими рулонными шторами, нашими предложениями.
Как ухаживать за автоматическими рулонными шторами, для.
Модные идеи с автоматическими рулонными шторами, узнайте больше.
Умные рулонные шторы для современного интерьера, с отзывами пользователей.
Почему автоматические рулонные шторы — это удобно и стильно, посмотрите наш каталог.
Комфорт и уют с автоматическими рулонными шторами, в нашем магазине.
Автоматические рулонные шторы — удобство в каждой детали, получите.
Автоматические рулонные шторы: идеальное решение для светолюбителей, узнайте больше.
Технологии автоматических рулонных штор: как это работает, познакомьтесь.
Эстетика автоматических рулонных штор, с идеями.
Сравнение автоматических рулонных штор различных брендов, узнайте.
Современные решения для окон с автоматическими рулонными шторами, из нашего ассортимента.
Энергоэффективность и автоматические рулонные шторы, в нашем магазине.
Советы по выбору автоматических рулонных штор для офисов, узнайте.
Где купить качественные автоматические рулонные шторы, проконсультируйтесь.
Идеальные шторы для бизнеса — автоматические рулонные шторы, с нашим предложением.
автоматическая рулонная штора автоматическая рулонная штора .
недорогие пластиковые окна недорогие пластиковые окна .
Chicken Road: Honest User Opinions
Chicken Road stands out as a gambling game with arcade vibes, attracting users with its easytograsp gameplay, high RTP (98%), and distinctive cashout system. We’ve collected honest feedback from actual players to see if it lives up to expectations.
What Players Like
Many users praise Chicken Road for its fastpaced gameplay and ease of use. With its cashout feature offering strategy and an RTP of 98%, it feels like a fairer alternative to conventional slot games. Beginners love the demo mode, which lets them try the game without risking money. Players also rave about the mobilefriendly design, which performs flawlessly even on outdated gadgets.
Melissa R., AU: “Unexpectedly enjoyable and balanced! The ability to cash out brings a layer of strategy.”
Nathan K., UK: “Its arcadeinspired style is a breath of fresh air, and it operates smoothly on my device.”
Players also enjoy the colorful, nostalgic design, which feels both fun and engaging.
Criticisms
Despite its strengths, Chicken Road isn’t without flaws. Some players find the gameplay repetitive and lacking depth. Others mention slow customer support and limited features. A common complaint is misleading advertising—many expected a pure arcade game, not a gambling app.
Tom B., US: “Fun at first, but it gets repetitive after a few days.”
Sam T., UK: “Advertised as a fun game, but it’s clearly a gambling app.”
Strengths and Weaknesses
Positive Aspects
Straightforward, actionpacked mechanics
High RTP (98%) ensures fairness
Demo mode for riskfree learning
Seamless operation on smartphones and tablets
Disadvantages
The gameplay may come across as monotonous
Lack of diversity and additional options
Slow or unresponsive customer support
Deceptive advertising
Final Verdict
Chicken Road shines through its openness, impressive RTP, and ease of access. Ideal for casual gamers or anyone just starting with online gambling. That said, its focus on chance and limited depth might not satisfy all players. To maximize enjoyment, stick to authorized, regulated sites.
Rating: 4/5
An enjoyable and equitable option, though it has areas to grow.
Элегантные автоматические рулонные шторы для вашего дома, о современных решениях.
Как выбрать автоматическую рулонную штору, ваше пространство.
Зачем нужны автоматические рулонные шторы в вашем доме, узнайте.
Преобразите свой дом с автоматическими рулонными шторами, в нашем магазине.
Управление автоматической рулонной шторой одним нажатием, обязательно ознакомьтесь.
Правила ухода за автоматическими рулонными шторами, для.
Как автоматические рулонные шторы меняют оформление интерьера, исследуйте.
Автоматизированные рулонные шторы: что нужно знать, с нашими экспертными рекомендациями.
Почему автоматические рулонные шторы — это удобно и стильно, изучите подробности.
Комфорт и уют с автоматическими рулонными шторами, узнайте больше.
Автоматические рулонные шторы — удобство в каждой детали, выберите.
Советы по использованию автоматических рулонных штор для оптимального освещения, на нашем сайте.
Что нужно знать о механизме автоматических рулонных штор, учитесь.
Автоматические рулонные шторы: как они меняют привычный интерьер, с новинками.
Обзор популярных брендов автоматических рулонных штор, изучите.
Автоматические рулонные шторы: идеальное дополнение к вашему интерьеру, подберите.
Энергоэффективные решения для окон: автоматические рулонные шторы, в нашем магазине.
Автоматические рулонные шторы и их преимущества для офисов, на нашем сайте.
Выбор автоматических рулонных штор: советы от экспертов, с нашими рекомендациями.
Как автоматические рулонные шторы улучшают атмосферу в общественных местах, с нашим предложением.
автоматическая рулонная штора автоматическая рулонная штора .
mostbet az canlı mərclər https://www.mostbet3041.ru
Автоматические рулонные шторы для вашего дома, для вашего интерьера.
Преимущества электрических рулонных штор, современные технологии для вашего комфорта.
Электронные рулонные шторы для вашего пространства, красота.
Умные решения для вашего интерьера, без лишних усилий.
Выбор рулонных штор с электроприводом, для улучшения комфорта.
Электрические рулонные шторы: стиль и технологии, с гарантией качества.
Современные рулонные шторы для окон, доступные для любого интерьера.
Какие выбрать электрические рулонные шторы?, для вашего дома.
Электрические рулонные шторы: как они работают?, добавляет удобства.
Самые популярные электрические рулонные шторы, для вашего комфорта.
Почему стоит выбрать электрические шторы, для создания неповторимого стиля.
Обзор электрических штор для окон, в вашем доме.
Где купить рулонные шторы с электроприводом?, с качественными материалами.
Электрические рулонные шторы: функциональность и стиль, для создания уюта.
Электрические рулонные шторы: преимущества, для вашего интерьера.
Электрические рулонные шторы: монтаж, просто и удобно.
Шторы с электроприводом для вашего дома, для стильного оформления.
Электрические рулонные шторы для бизнеса, для современной эстетики.
Обзор рулонных штор с электроприводом, для вашего дома.
электрические рулонные шторы на окна электрические рулонные шторы на окна .
Оформиление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4906 клиентов воспользовались услугой — теперь ваша очередь.
Готовый диплом купить — ответим быстро, без лишних формальностей.
Мы предлагаем оформление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 1382 клиентов воспользовались услугой — теперь ваша очередь.
Покупка диплома — ответим быстро, без лишних формальностей.
Мы предлагаем оформление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 3959 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом о среднем — ответим быстро, без лишних формальностей.
Оформиление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 2362 клиентов воспользовались услугой — теперь ваша очередь.
Диплом сколько стоит — ответим быстро, без лишних формальностей.
Оформиление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 2309 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом о высшем образовании Москва — ответим быстро, без лишних формальностей.
айфон в рассрочку спб http://www.kupit-ajfon-cs.ru/ .
Электрические рулонные шторы на окна, для вашего интерьера.
Преимущества электрических рулонных штор, современные технологии для вашего комфорта.
Электронные рулонные шторы для вашего пространства, красота.
Управление рулонными шторами одним нажатием, без лишних усилий.
Выбор рулонных штор с электроприводом, для создания уюта.
Электрические рулонные шторы: стиль и технологии, доступные решения для вашего дома.
Инновационные электрические рулонные шторы, доступные для любого интерьера.
Лучшие модели электрических рулонных штор, для стильного интерьера.
Электрические рулонные шторы: как они работают?, добавляет стиля.
Самые популярные электрические рулонные шторы, для вашего комфорта.
Электрические рулонные шторы: удобство и стиль, для создания неповторимого стиля.
Как выбрать электрические рулонные шторы, в вашем доме.
Купить электрические рулонные шторы: советы, с качественными материалами.
Электрические рулонные шторы: функциональность и стиль, в лучшую сторону.
Электрические рулонные шторы: преимущества, для вашего комфорта.
Установка рулонных штор: пошаговая инструкция, с соблюдением всех стандартов.
Современные автоматические рулонные шторы, для стильного оформления.
Автоматизация офисных окон: рулонные шторы, для улучшения рабочего пространства.
Обзор рулонных штор с электроприводом, для вашего офиса.
электрические рулонные шторы на окна электрические рулонные шторы на окна .
Here’s more on the topic https://krylslova.ru/
Мы предлагаем оформление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4935 клиентов воспользовались услугой — теперь ваша очередь.
Покупка диплома — ответим быстро, без лишних формальностей.
Покупка дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 2797 клиентов воспользовались услугой — теперь ваша очередь.
Перейти — ответим быстро, без лишних формальностей.
Оформиление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4846 клиентов воспользовались услугой — теперь ваша очередь.
Где можно купить диплом о высшем образовании — ответим быстро, без лишних формальностей.
kupit-drova-v-spb-365.ru .
Покупка дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4529 клиентов воспользовались услугой — теперь ваша очередь.
Купить дипломы вуза о высшем образовании — ответим быстро, без лишних формальностей.
Оформиление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4769 клиентов воспользовались услугой — теперь ваша очередь.
Куплю диплом в Москве — ответим быстро, без лишних формальностей.
Покупка дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 2901 клиентов воспользовались услугой — теперь ваша очередь.
Диплом купить — ответим быстро, без лишних формальностей.
Не упустите возможность получить хурма кредит на карту быстро и удобно!
Малые займы становятся актуальными для большого числа людей. Все больше людей выбирают этот вариант финансовой помощи. Основной причиной этого является легкость получения. В большинстве случаев процесс занимает всего несколько минут. Это особенно актуально для тех, кто испытывает финансовые трудности.
Другой важный аспект — это минимальные требования к заемщику. Многие организации не требуют подтверждения дохода. Это открывает двери для заемщиков, которые не могут подтвердить официальный доход. Тем не менее, стоит помнить о рисках.
Необходимо аккуратно выбирать, у кого брать займ. Рынок микрофинансовых организаций достаточно велик. Некоторые из них могут предлагать невыгодные условия. Поэтому целесообразно заранее изучить отзывы и условия предоставления займов.
Подводя итоги, можно сказать, что мелкие займы могут помочь в сложной финансовой ситуации. Тем не менее, важно не забывать о рисках и подходить к ним осознанно. Следует детально анализировать условия и репутацию компании перед тем, как принимать решение. Таким образом, вы сможете избежать неприятных ситуаций.
электрокарниз москва elektrokarniz25.ru .
Профессиональная анонимная наркологическая клиника. Лечение зависимостей, капельницы, вывод из запоя, реабилитация. Анонимно, круглосуточно, с поддержкой врачей и психологов.
1win app download apk https://1win3027.com/
kupit-drova-v-spb-365.ru .
Thanks for the article. Here’s more on the topic https://orenbash.ru/
электрокарниз http://elektrokarnizy10.ru .
kupit-drova-v-spb-365.ru .
Мы предлагаем оформление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 2431 клиентов воспользовались услугой — теперь ваша очередь.
Купить дипломы о высшем — ответим быстро, без лишних формальностей.
Покупка дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 1007 клиентов воспользовались услугой — теперь ваша очередь.
Здесь — ответим быстро, без лишних формальностей.
Покупка дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4596 клиентов воспользовались услугой — теперь ваша очередь.
Куплю диплом Москва — ответим быстро, без лишних формальностей.
Мы предлагаем оформление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 3545 клиентов воспользовались услугой — теперь ваша очередь.
Обращайтесь — ответим быстро, без лишних формальностей.
kupit-drova-v-spb-365.ru .
Thanks for the article. Here’s more on the topic https://orenbash.ru/
Оформиление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 2969 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом недорого — ответим быстро, без лишних формальностей.
Мы предлагаем оформление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4975 клиентов воспользовались услугой — теперь ваша очередь.
Продажа дипломов — ответим быстро, без лишних формальностей.
Оформиление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 1028 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом о высшем образовании — ответим быстро, без лишних формальностей.
how to register on 1win [url=https://www.1win3027.com]https://www.1win3027.com[/url]
Мы предлагаем оформление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 2370 клиентов воспользовались услугой — теперь ваша очередь.
Пишите — ответим быстро, без лишних формальностей.
Мы предлагаем оформление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 1748 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом о высшем образовании Украины — ответим быстро, без лишних формальностей.
Покупка дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 1279 клиентов воспользовались услугой — теперь ваша очередь.
Пишите в личные сообщения — ответим быстро, без лишних формальностей.
mostbet az canlı dəstək mostbet az canlı dəstək
Here’s more on the topic https://bediva.ru/
Here’s more on the topic https://bediva.ru/
buy accounts facebook account market account buying service
Оформиление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 2888 клиентов воспользовались услугой — теперь ваша очередь.
Купить настоящий диплом — ответим быстро, без лишних формальностей.
купить дрова в сетках .
мирена спираль сайт мирена спираль купить цена
Оформиление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 2140 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом университета — ответим быстро, без лишних формальностей.
Оформиление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4310 клиентов воспользовались услугой — теперь ваша очередь.
Куплю диплом — ответим быстро, без лишних формальностей.
Мы предлагаем оформление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4404 клиентов воспользовались услугой — теперь ваша очередь.
Диплом об образовании купить — ответим быстро, без лишних формальностей.
kupit-drova-v-setkah-812.ru .
пластиковые окна москва пластиковые окна москва .
лазерная обработка металла лазерные работы
типография быстро услуги типографии
buy facebook advertising accounts account buying service secure account sales
узи сканер купить москва https://kupit-uzi-apparat15.ru .
лист отчета по практике https://gotov-otchet.ru
куб сосновых дров цена .
kupit-drova-kolotye-812.ru .
Мы предлагаем оформление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 3574 клиентов воспользовались услугой — теперь ваша очередь.
Перейти — ответим быстро, без лишних формальностей.
Оформиление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4332 клиентов воспользовались услугой — теперь ваша очередь.
Перейти — ответим быстро, без лишних формальностей.
Оформиление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 3723 клиентов воспользовались услугой — теперь ваша очередь.
Купить дипломы о высшем — ответим быстро, без лишних формальностей.
доставка воды на стройку dostavka-tehnicheskoi-vodi.ru .
Покупка дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 1606 клиентов воспользовались услугой — теперь ваша очередь.
Узнать подробнее — ответим быстро, без лишних формальностей.
багги сколько стоит багги сколько стоит .
Мы предлагаем оформление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 1024 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом института — ответим быстро, без лишних формальностей.
Оформиление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 2891 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом документы — ответим быстро, без лишних формальностей.
Оформиление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 3353 клиентов воспользовались услугой — теперь ваша очередь.
Купить учебный диплом — ответим быстро, без лишних формальностей.
Покупка дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 2788 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом Киев — ответим быстро, без лишних формальностей.
Мы предлагаем оформление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 1199 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом института образования — ответим быстро, без лишних формальностей.
ставки на спорт прогнозы бесплатно от профессионалов ставки на спорт прогнозы бесплатно от профессионалов .
футбол прогнозы http://prognozy-na-futbol-1.ru/ .
онлайн оценка наручных часов http://ocenka-chasov-onlajn8.ru .
Мы предлагаем оформление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 3890 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом недорого — ответим быстро, без лишних формальностей.
Покупка дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 2334 клиентов воспользовались услугой — теперь ваша очередь.
На этой странице — ответим быстро, без лишних формальностей.
Покупка дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 1114 клиентов воспользовались услугой — теперь ваша очередь.
Куплю диплом — ответим быстро, без лишних формальностей.
Покупка дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 1750 клиентов воспользовались услугой — теперь ваша очередь.
Пишите нам — ответим быстро, без лишних формальностей.
Мы предлагаем оформление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4191 клиентов воспользовались услугой — теперь ваша очередь.
На этой странице — ответим быстро, без лишних формальностей.
Покупка дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4930 клиентов воспользовались услугой — теперь ваша очередь.
Где купить диплом — ответим быстро, без лишних формальностей.
Мы предлагаем оформление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 1152 клиентов воспользовались услугой — теперь ваша очередь.
Купить дипломы — ответим быстро, без лишних формальностей.
Оформиление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4305 клиентов воспользовались услугой — теперь ваша очередь.
Купить учебный диплом — ответим быстро, без лишних формальностей.
Заказать дипломную работу https://diplomikon.ru/ недорого и без стресса. Выполняем работы по ГОСТ, учитываем методички и рекомендации преподавателя.
купить пластиковые окна недорого в москве купить пластиковые окна недорого в москве .
оценка часов онлайн по фото бесплатно москва ocenka-chasov-onlajn10.ru .
ремонт квартир цена за 1м2 ремонт квартир цена за 1м2 .
окна пвх окна пвх .
Here’s more on the topic https://kinocirk.ru/
1win armenia 1win armenia
Диплом под ключ https://diplomnazakaz-online.ru от выбора темы до презентации. Профессиональные авторы, оформление по ГОСТ, высокая уникальность.
пластиковые окна рехау пластиковые окна рехау .
ai therapy chatbot ai therapy chatbot .
куб дров цена .
пластиковые окна rehau пластиковые окна rehau .
Мы предлагаем оформление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 2501 клиентов воспользовались услугой — теперь ваша очередь.
Уточнить здесь — ответим быстро, без лишних формальностей.
Оформиление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 2556 клиентов воспользовались услугой — теперь ваша очередь.
Где купить диплом — ответим быстро, без лишних формальностей.
Оформиление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 3050 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом документы — ответим быстро, без лишних формальностей.
Мы предлагаем оформление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 2794 клиентов воспользовались услугой — теперь ваша очередь.
Диплом института купить — ответим быстро, без лишних формальностей.
пластиковые окна пластиковые окна .
esim turkey buy esim for apple
Here’s more on the topic https://kinocirk.ru/
Оформиление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4802 клиентов воспользовались услугой — теперь ваша очередь.
Высшее образование купить диплом с занесением — ответим быстро, без лишних формальностей.
Мы предлагаем оформление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 1634 клиентов воспользовались услугой — теперь ваша очередь.
Куплю диплом о высшем образовании — ответим быстро, без лишних формальностей.
Покупка дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 2279 клиентов воспользовались услугой — теперь ваша очередь.
Купить дипломы о высшем — ответим быстро, без лишних формальностей.
Покупка дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 3039 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом о среднем специальном образовании — ответим быстро, без лишних формальностей.
Покупка дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 2334 клиентов воспользовались услугой — теперь ваша очередь.
Куплю диплом Москва — ответим быстро, без лишних формальностей.
Mental Health Mental Health .
mental health support chatbot mental-health21.com .
mental health support chat http://mental-health23.com .
1win am http://www.1win3072.ru
купить дрова колотые .
kupit-kub-drov-812.ru .
kupit-kub-drov-812.ru .
1win պաշտոնական https://1win3073.ru
винлайн букмекерская бонус при регистрации винлайн букмекерская бонус при регистрации .
Мы предлагаем оформление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 3503 клиентов воспользовались услугой — теперь ваша очередь.
На этой странице — ответим быстро, без лишних формальностей.
Покупка дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4618 клиентов воспользовались услугой — теперь ваша очередь.
Звоните — ответим быстро, без лишних формальностей.
1win պաշտոնական 1win պաշտոնական
Оформиление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 2270 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом Москва — ответим быстро, без лишних формальностей.
Оформиление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 2864 клиентов воспользовались услугой — теперь ваша очередь.
Открыть — ответим быстро, без лишних формальностей.
Покупка дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4935 клиентов воспользовались услугой — теперь ваша очередь.
Пишите — ответим быстро, без лишних формальностей.
Оформиление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 2289 клиентов воспользовались услугой — теперь ваша очередь.
Перейти — ответим быстро, без лишних формальностей.
Оформиление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 1881 клиентов воспользовались услугой — теперь ваша очередь.
Диплом института купить — ответим быстро, без лишних формальностей.
дрова колотые 30 см купить .
Нужна душевая кабина? душевая кабина: компактные и просторные модели, стеклянные и пластиковые, с глубоким поддоном и без. Установка под ключ, гарантия, помощь в подборе. Современный дизайн и доступные цены!
https://t.me/s/TeleCasino_1win/5307
winline промокод на фрибет 2025 https://kak-poluchit-fribet-v-winline-2025.ru/ .
Покупка дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 1728 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом о высшем образовании Украины — ответим быстро, без лишних формальностей.
kupit-kub-berezovyh-drov-812.ru .
Мы предлагаем оформление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4791 клиентов воспользовались услугой — теперь ваша очередь.
Где можно купить диплом о высшем образовании — ответим быстро, без лишних формальностей.
Оформиление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 1729 клиентов воспользовались услугой — теперь ваша очередь.
Диплом о среднем образовании купить — ответим быстро, без лишних формальностей.
Покупка дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 1059 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом о среднем специальном — ответим быстро, без лишних формальностей.
Мы предлагаем оформление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4555 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом университета — ответим быстро, без лишних формальностей.
Мы предлагаем оформление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 2637 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом о среднем специальном образовании цена — ответим быстро, без лишних формальностей.
внедрение ерп в организации http://1s-erp-vnedrenie.ru .
камера холодильная камера холодильная .
Thanks for the article. Here’s more on the topic https://mehelper.ru/
Оформиление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 1820 клиентов воспользовались услугой — теперь ваша очередь.
Купить дипломы о высшем образовании цена — ответим быстро, без лишних формальностей.
Покупка дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 3645 клиентов воспользовались услугой — теперь ваша очередь.
Куплю диплом — ответим быстро, без лишних формальностей.
Оформиление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4803 клиентов воспользовались услугой — теперь ваша очередь.
Перейти — ответим быстро, без лишних формальностей.
Покупка дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 2147 клиентов воспользовались услугой — теперь ваша очередь.
Купить дипломы — ответим быстро, без лишних формальностей.
Покупка дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 2902 клиентов воспользовались услугой — теперь ваша очередь.
Диплом колледжа купить — ответим быстро, без лишних формальностей.
окна rehau москва alfa-okno.ru .
1win https://www.1win3064.ru
пластиковые окна москва пластиковые окна москва .
холодильная камера цены xn—-7sbabtdykncetibz6f4f8b.xn--p1ai .
пластиковые окна на заказ пластиковые окна на заказ .
внедрение ерп 1с http://www.1s-erp-vnedrenie.ru/ .
пластиковые окна от производителя москва пластиковые окна от производителя москва .
купить программу 1с для ип kupit-1s21.ru .
пластиковые окна от производителя москва пластиковые окна от производителя москва .
blagoustrojstvo-vezda-na-uchastok-495.ru .
1с купить москва 1с купить москва .
blagoustrojstvo-vezda-na-uchastok-495.ru .
аренда яхты марин http://yacht-rental-oae.com/ .
Оформиление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4333 клиентов воспользовались услугой — теперь ваша очередь.
Куплю диплом — ответим быстро, без лишних формальностей.
Мы предлагаем оформление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 3531 клиентов воспользовались услугой — теперь ваша очередь.
Диплом об образовании купить — ответим быстро, без лишних формальностей.
Покупка дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4484 клиентов воспользовались услугой — теперь ваша очередь.
Купить дипломы о высшем образовании срочно — ответим быстро, без лишних формальностей.
Оформиление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4137 клиентов воспользовались услугой — теперь ваша очередь.
Диплом об образовании купить — ответим быстро, без лишних формальностей.
Оформиление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 2510 клиентов воспользовались услугой — теперь ваша очередь.
Перейти — ответим быстро, без лишних формальностей.
займ на карту срочно без отказа займ на карту срочно без отказа .
найкраще кіно 2025 нові фільми 2025 в Україні
українські фільми 2025 фільми онлайн 1080p безкоштовно
Оформиление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 3950 клиентов воспользовались услугой — теперь ваша очередь.
Где можно купить диплом — ответим быстро, без лишних формальностей.
Оформиление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4390 клиентов воспользовались услугой — теперь ваша очередь.
Узнать подробнее — ответим быстро, без лишних формальностей.
Мы предлагаем оформление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 3958 клиентов воспользовались услугой — теперь ваша очередь.
Сайт компании — ответим быстро, без лишних формальностей.
доставка авто https://avtovoz-av8.ru/ .
прогноз букмекеров на сегодня http://www.stavki-na-sport-prognozy1.ru .
candy casino https://candy-casino-7.com .
сантехника логотип http://evropejskaya-santehnika.ru .
https://t.me/TeleCasino_1Win/5
мелбет тото промокод http://www.melbet1035.ru
candy casino http://www.candy-casino-7.com .
акриловая ванна с гидромассажем купить http://www.hidromassazhnaya-vanna2.ru .
Мы предлагаем оформление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 3415 клиентов воспользовались услугой — теперь ваша очередь.
Купить готовый диплом — ответим быстро, без лишних формальностей.
Покупка дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4072 клиентов воспользовались услугой — теперь ваша очередь.
Больше — ответим быстро, без лишних формальностей.
Оформиление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4651 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом о высшем образовании Москва — ответим быстро, без лишних формальностей.
Мы предлагаем оформление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 2078 клиентов воспользовались услугой — теперь ваша очередь.
Диплом бакалавра купить — ответим быстро, без лишних формальностей.
Оформиление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 2342 клиентов воспользовались услугой — теперь ваша очередь.
Куплю диплом о высшем образовании — ответим быстро, без лишних формальностей.
Мы предлагаем оформление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 3010 клиентов воспользовались услугой — теперь ваша очередь.
Покупка диплома — ответим быстро, без лишних формальностей.
заезд на участок через канаву под ключ московская область цена .
погреб для дачи .
Мы предлагаем оформление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 2076 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом о среднем образовании — ответим быстро, без лишних формальностей.
Покупка дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 2853 клиентов воспользовались услугой — теперь ваша очередь.
Куплю диплом в Москве — ответим быстро, без лишних формальностей.
заезд для машины .
德州撲克規則
想學德州撲克卻完全沒頭緒?不管你是零基礎還是想重新複習,這篇就是為你準備的!一次搞懂德州撲克規則、牌型大小、下注流程與常見術語,讓你從看不懂到能開打一局只差這一篇!看完這篇,是不是對德州撲克整個比較有頭緒了?從玩法、流程到那些常聽不懂的術語,現在是不是都懂了七八成?準備好了嗎?快記好牌型、搞懂位置,然後開打一局練練手啦!富遊娛樂城提供最新線上德州撲克供玩家遊玩!首家引進OFC大菠蘿撲克、NLH無限注德州撲克玩法,上桌就開打,數錢數不停!
красивый игровой пк красивый игровой пк .
Here is another site on the topic best kindle unlimited romance books
как пополнить счет на melbet http://www.melbet1033.ru
vezd-na-uchastok-pod-klyuch-495.ru .
melbet 21 http://melbet1035.ru/
рулонные шторы производство rulonnye-shtory-s-elektroprivodom90.ru .
vezd-na-uchastok-pod-klyuch-495.ru .
ragnarok private server 2025
[…]below you will find the link to some sites that we think you must visit[…]
стильные горшки для цветов стильные горшки для цветов .
рулонные шторы на пластиковые окна на кухню рулонные шторы на пластиковые окна на кухню .
заезд для авто .
автоматические карнизы для штор http://elektrokarniz150.ru/ .
мп3 новинки мп3 новинки .
пластиковый погреб для дачи от производителя недорого .
автоматическая рулонная штора https://rulonnye-shtory-s-elektroprivodom190.ru .
погреб для дачи цены .
карниз с электроприводом https://www.elektrokarnizy150.ru .
Мы предлагаем оформление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 1654 клиентов воспользовались услугой — теперь ваша очередь.
Купить дипломы о высшем — ответим быстро, без лишних формальностей.
Покупка дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 2038 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом недорого — ответим быстро, без лишних формальностей.
Мы предлагаем оформление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 3367 клиентов воспользовались услугой — теперь ваша очередь.
Где купить диплом о среднем специальном образовании — ответим быстро, без лишних формальностей.
Покупка дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4171 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом о среднем специальном образовании — ответим быстро, без лишних формальностей.
Покупка дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4356 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом о среднем специальном образовании цена — ответим быстро, без лишних формальностей.
Оформиление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4947 клиентов воспользовались услугой — теперь ваша очередь.
Диплом об образовании купить — ответим быстро, без лишних формальностей.
Оформиление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4155 клиентов воспользовались услугой — теперь ваша очередь.
Дипломы о высшем образовании купить — ответим быстро, без лишних формальностей.
Оформиление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4846 клиентов воспользовались услугой — теперь ваша очередь.
Где купить диплом о высшем образовании — ответим быстро, без лишних формальностей.
Оформиление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 3302 клиентов воспользовались услугой — теперь ваша очередь.
Купить диплом Москва — ответим быстро, без лишних формальностей.
Мы предлагаем оформление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 3185 клиентов воспользовались услугой — теперь ваша очередь.
На этой странице — ответим быстро, без лишних формальностей.
Мы предлагаем оформление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4403 клиентов воспользовались услугой — теперь ваша очередь.
Диплом купить — ответим быстро, без лишних формальностей.
Мы предлагаем оформление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
— Конфиденциально
— Доставка 3–7 дней
— Любая специальность
Уже более 4334 клиентов воспользовались услугой — теперь ваша очередь.
Прочитать — ответим быстро, без лишних формальностей.
data-vyhoda.online http://www.data-vyhoda.online .
цветочные горшки дизайнерские купить цветочные горшки дизайнерские купить .
Рекомендую статью https://graph.org/Luchshie-sposoby-vybrat-otel-v-Minske-gid-po-komfortnomu-otdyhu-08-03
Рекомендую статью https://graph.org/Otdyh-v-Tulskoj-oblasti-s-bassejnom-idealnoe-mesto-dlya-rasslableniya-i-vosstanovleniya-sil-08-03
[url=https://www.sdelat-vezd-na-uchastok-495.ru]sdelat-vezd-na-uchastok-495.ru[/url] .
malishi.online http://www.malishi.online .
Памятники культуры https://pamyatniki-kultury.ru .
проложить дренаж на участке стоимость .
kupit-gotovyy-pogreb-247.ru .
дренаж участка под ключ цена .
drenazh-pod-klyuch-811.ru .
proobzor proobzor.info .
obustrojstvo-vezda-na-uchastok-495.ru .
электро рулонные шторы elektricheskie-rulonnye-shtory90.ru .
интересные горшки для цветов интересные горшки для цветов .
дизайнерский горшок дизайнерский горшок .
plastikovyy-pogreb-812.ru .
дренажная система вокруг дома цена .
цена дренаж .
роликовые шторы rulonnye-shtory-s-elektroprivodom11.ru .
drenazh-vokrug-doma-811.ru .
электрокарнизы москва elektrokarnizy33.ru .
проект перепланировки квартиры цена москва proekt-pereplanirovki-kvartiry4.ru .
карнизы для штор с электроприводом http://elektrokarniz11.ru/ .
автоматические карнизы для штор автоматические карнизы для штор .
изготовление проекта перепланировки квартиры http://www.proekt-pereplanirovki-kvartiry4.ru/ .
креативные горшки для цветов креативные горшки для цветов .
pagina oficial de 1win https://1win40009.ru
moldova casino moldova casino
I recommend https://ancientcivs.ru/
Here is another site on the topic https://a-so.ru/
zapravka-gazgoldera-v-moskovskoy-oblasti-499.ru .
drenazhnye-raboty-811.ru .
plastikovyy-pogreb-kupit-812.ru .
drenazhnye-raboty-811.ru .
погреб для дачи цены .
1win реєстрація https://1win1169.ru
стильные цветочные горшки купить http://www.dizaynerskie-kashpo-nsk.ru .
1win слоты скачать на андроид https://www.1win40015.ru
автоматика для жалюзи в москве http://www.elektricheskie-zhalyuzi.ru/ .
гидроизоляция цена https://gidroizolyaciya-cena-1.ru .
гидроизоляция цена http://www.gidroizolyaciya-cena-2.ru/ .
погреб из пластика дешево .
пластмассовый погреб для дачи .
zapravka-gazom-gazgoldera-499.ru .
ushp-fundament-499.ru .
большой погреб .
Here is another site on the topic https://a-so.ru/
dulapuri la comanda http://1win40015.ru/
цена залить фундамент .
id mostbet com id mostbet com
горшки для цветов пластиковые с автополивом http://www.kashpo-s-avtopolivom-kazan.ru/ .
умные горшки для цветов с автополивом умные горшки для цветов с автополивом .
стоимость заправки газгольдера 5000 литров .
sportandbets https://www.sportbets30.ru .
ushp-fundament-pod-klyuch-499.ru .
ушп плита .
купить привод somfy avtomatika-somfy.ru .
sportandbets https://www.sportbets31.ru .
оригинальные кашпо для цветов оригинальные кашпо для цветов .
стильные горшки https://dizaynerskie-kashpo-rnd.ru/ .
заправка газгольдеров область .
заправка газгольдеров сжиженным газом .
прогнозы на счет в футболе прогнозы на счет в футболе .
прогнозы на спорт с анализом https://kompyuternye-prognozy-na-futbol13.ru/ .
скачать приложение mostbet https://mostbet11072.ru
строительство фундамента ушп .
вход мостбет http://mostbet11072.ru/
плита ушп цена под ключ .
погреб пластиковый купить под ключ .
гидроизоляция цена за м2 offthevylc.ru/polezno-znat/ceny-na-gidroizoljaciju-v-moskve-i-regionah-rossii.html .
купить сантехнику италия https://gessi-santehnika-5.ru/ .
уличный погреб с входом .
сайт mostbet http://www.mostbet11075.ru
прогноз на спорт футбол на сегодня точный http://kompyuternye-prognozy-na-futbol13.ru .
кашпо с автополивом кашпо с автополивом .
горшки с автополивом для комнатных растений купить https://www.kashpo-s-avtopolivom-kazan.ru .
сантехника gessi сантехника gessi .
Stavki Prognozy http://www.stavki-prognozy-two.ru .
самые точные прогнозы на спорт от профессионалов http://www.prognozy-na-sport-7.ru/ .
zaezd-cherez-kanavu-365.ru .
шведская плитка .
zaezd-cherez-kanavu-365.ru .
стоимость ушп фундамента .
melbet промокод на фриспины melbet3006.com
СтавкиПрогнозы https://stavki-prognozy-1.ru .
горшок с автополивом горшок с автополивом .
zapravka-propan-butanom-gazgoldera-499.ru .
стоимость заправки газгольдера 5000 .
Stavki Prognozy https://www.stavki-prognozy-2.ru .
ushp-fundament-10-na-10-499.ru .
сделать заезд на участок через канаву цена под ключ .
[url=https://ushp-fundament-10-na-10-499.ru]стоимость шведской плиты за м2 утепленной[/url] .
купить аппарат для узи https://kupit-uzi-apparat25.ru .
zaezd-dlya-mashiny-365.ru .
аппарат для узи аппарат для узи .
Доброго!
Долго не мог уяснить как поднять сайт и свои проекты и нарастить ИКС Яндекса и узнал от друзей профессионалов,
топовых ребят, именно они разработали недорогой и главное top прогон Xrumer — https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Прогон Хрумер для сайта позволяет быстро увеличить ссылочный профиль. Увеличение ссылочной массы быстро становится возможным через Xrumer. Линкбилдинг через автоматические проги ускоряет продвижение. Xrumer форумный спам облегчает массовый постинг. Эффективный прогон для роста DR экономит время специалистов.
видео для продвижения сайта, региональные сайты seo, линкбилдинг что это такое простыми словами
Рассылки с помощью Xrumer, сайт продвижения бизнеса, сколько стоит seo продвижение сайт в москве
!!Удачи и роста в топах!!
TOGELONLINE88 hadir memberikan berita seru seputar kompetisi spin Toto Slot 88 dan pasang angka togel 4D terbaik. Platform ini menyediakan platform legal dengan keandalan, data akurat, serta pengalaman gaming dengan sistem terorganisir.
Lebih dari itu, TOGELONLINE88 juga menyediakan berbagai provider mesin slot dan game tembak ikan yang bisa dimainkan 24/7 tanpa batas, dengan potensi memenangkan jackpot maxwin yang luar biasa besar.
Kepada penikmat permainan togel dan slot online, TOGELONLINE88 merupakan pilihan terbaik karena menjamin kenyamanan, proteksi, dan keseruan dalam bermain. Dengan berbagai promo menarik beserta sistem akses mudah, situs ini menawarkan kenyamanan gaming sangat menyenangkan.
Jadi, tunggu apa lagi? Ikuti sekarang kompetisi spin Toto Slot 88 dan prediksi angka 4D terpercaya hanya di TOGELONLINE88. Raih kesempatan menang besar dan nikmati sensasi hadiah jackpot maksimal luar biasa!
zapravka-gazgoldera-moskva-499.ru .
прогноз на хоккей сегодня от профессионалов бесплатно prognozy-na-khokkej1.ru .
горшки для цветов с поливом http://www.kashpo-s-avtopolivom-spb.ru .
умный горшок для растений умный горшок для растений .
узи аппарат цена новый https://kupit-uzi-apparat26.ru .
Thanks for the article http://sharm.cc.ua/ .
Доброго!
Долго не спал и думал как поднять сайт и свои проекты и нарастить ИКС Яндекса и узнал от успещных seo,
энтузиастов ребят, именно они разработали недорогой и главное продуктивный прогон Хрумером — https://www.bing.com/search?q=bullet+%D0%BF%D1%80%D0%BE%D0%B3%D0%BE%D0%BD
Линкбилдинг через комментарии помогает разнообразить ссылочный профиль. Улучшение ссылочного профиля с Xrumer делает продвижение стабильным. Автоматическое размещение ссылок ускоряет рост DR. Xrumer: настройка для SEO делает работу системной. Как поднять DR сайта за неделю становится возможным.
раскрутка сайта трафиком, seo framework, SEO-прогон для повышения позиций
Прогон ссылок для повышения авторитета, помощник seo, саратове продвижение сайта
!!Удачи и роста в топах!!
ставки и слоты melbet ставки и слоты melbet .
заправка газгольдера в московской .
Thanks for the article https://telegra.ph/Test-spinninga-na-shchuku-Kak-vybrat-optimalnuyu-model-01-13 .
заправка газгольдера .
implant dentar fara surub
стоимость ушп за 1 м2 фундамента .
zaezd-pod-klyuch-365.ru .
заливка фундамента под дом цена .
zaezd-pod-klyuch-365.ru .
кашпо для улицы кашпо для улицы .
мостбэт мостбэт
sports bet http://www.sportbets31.ru/ .
новости спорта http://www.novosti-sporta-3.ru/ .
Thanks for the article https://scioly.org/forums/memberlist.php?mode=viewprofile&u=159748 .
kupit-drova-v-sergievom-posade-365.ru .
мелбет kg https://mostbet4117.ru
sportandbets https://www.sportbets31.ru .
wix seo experts
[…]below you will uncover the link to some sites that we assume you need to visit[…]
новости спорта сегодня http://novosti-sporta-3.ru .
купить недорогие березовые дрова цена .
где купить осиновые дрова .
строительство домов http://stroitelstvo-domov-irkutsk-1.ru/ .
строительство домов под ключ иркутск строительство домов под ключ иркутск .
строительство фундаментов ушп .
Customer service is another essential feature of 888starz, offering support to users around the clock.
888starz зеркало uz https://888starz-eng.com/ru/
monolitnyy-fundament-ushp-499.ru .
Thanks for the article https://sevportal.info/forum/viewtopic.php?f=78&t=45671&p=197336#p197336 .
кашпо уличные большие кашпо уличные большие .
длинное уличное кашпо http://www.ulichnye-kashpo-kazan.ru/ .
новости спорта новости спорта .
mostbet promo kod az https://mostbet4133.ru
Thanks for the article https://telegra.ph/Luchshaya-koleblyushchayasya-blesna-na-shchuku-Rejting-primanok-01-13 .
Masters: Ваш оптимальный инструмент для роста компании
Автоматизируйте процедуру интернет-бронирования
Платформа Masters предоставляет комфортный механизм для обработки веб-регистраций.
Все посетители могут самостоятельно выбирать сервис, миг и специалиста при-помощи веб-сайт или социальные сети, что
кардинально уменьшает массу отказов и освобождает ваше время https://beautyinvent-franchise.ru/.
Никогда не пропускайте о
визитах с помощью умных-предупреждений
Предупреждения посетителям
— это залог к снижению количества прогулов.
Механизм роботизированно направляет смс-сообщение и электронные-письма предупреждения о предстоящем визите, способствуя
вашим клиентам не упускать запланированные встречи.
Ведите всю клиентскую репозиторий в одном месте
Ведение клиентской репозитория разрешает вам записывать всю
хронологию отношений, предпочтения и детали каждого клиента.
Анализируйте сведения, определяйте
личные условия и поднимайте
лояльность регулярных посетителей.
Сетевой-заказ 24/7
Автоматические предупреждения через SMS и электронной-почте
Удобное управление календаря
Тщательная заказчикская база с историей приёмов
Анализ и документы с деятельности салона
Избирайте Masters — передовое инструмент для мастеров сферы
красоты, которое посодействует вам автоматизировать монотонную-работу, повысить прибыль
и построить безупречный
обслуживание для ваших заказчиков.
https://t.me/s/play_1win_online
сухие дрова сколько стоит .
kupit-drova-v-shchyolkovo-365.ru .
мостбет как начать играть http://www.mostbet4163.ru
stavkiprognozy http://stavki-prognozy-two.ru/ .
ставки прогнозы http://www.stavki-prognozy-1.ru .
въезд для машины на участок .
переезд через канаву на даче .
Thanks for the article https://jobhop.co.uk/blog/418725/— .
временный заезд на участок .
мостбет через карту mostbet4163.ru
fundament-ushp-moskovskaya-oblast-499.ru .
напольный горшок для цветов напольный горшок для цветов .
клиника наркологическая москва narkologicheskaya-klinika-12.ru .
kupit-drova-v-noginske-365.ru .
строительство домов под ключ иркутск http://www.stroitelstvo-domov-irkutsk-1.ru .
kupit-drova-v-noginske-365.ru .
новые продажа дров .
most bet uz http://mostbet4163.ru
Chery в Москве — официальный дилер с полным спектром услуг: продажа новых автомобилей, кредитование, страхование и профессиональные консультации по всем вопросам.
???? 888starz ????? ????? ?? ????? ?? ???? ???????? . ??? ??? ???? ?? ????? ?????? ???? ?? ?????? ??????? ?? .
??? ????? 888starz ??????? ????? ?????? ??? ???? ???????. ????? ?????? ??? ????? ??????? ??????? ?????? ?? ??????? ???????.
????? ???? 888starz ?????? ????? ??????? . ??? ??????? ?? ?????? ???????? ????? ????? .
???????? ??? ???? ???? 888starz ?????? ????? ??????? ????? . ????? ??? ???????? ?????? ????? ???????? ??? ???? 888starz .
888 تحميل https://888starz-africa.pro/apk/
Link Pyramid Backlinks SEO Pyramid Backlink For Google
External links of your site on forums, sections, comments.
Backlinks – three steps
Stage 1 – Standard external links.
Step 2 – Backlinks through redirects from top-tier sites with PageRank PR 9–10, for example –
Step 3 – Listing on SEO analysis platforms –
The advantage of link analysis platforms is that they show the Google search engine a website structure, which is crucial!
Explanation for Stage 3 – only the main page of the site is added to analyzers, internal pages cannot be included.
I complete all phases sequentially, resulting in 10,000–20,000 inbound links from the three stages.
This linking tactic is most effective.
Example of placement on analyzer sites via a text file.
doroga-k-uchastku-812.ru .
doroga-k-uchastku-812.ru .
bannye-drova-sergiev-posad.ru .
bannye-drova-sergiev-posad.ru .
дрова недорого .
888starz ?? ???? ????? ???? ?????? ?????? ?? ??????? . ??? ??? ???? ?? ????? ?????? ???? ?? ?????? ??????? ?? .
??? ????? 888starz ??????? ????? ?????? ??? ???? ???????. ????? ?????? ??? ????? ??????? ??????? ?????? ?? ??????? ???????.
????? 888starz ??????? ?????? ?????????? . ????? ???????? ??? 888starz ?????? ???? ???? ????.
????? ????????? ?? ?????? ????? ??? ??????? ?? 888starz. ???? ??? ???????? ?? ????? ????? ????? ????? ?????? ?? ?????????? .
888 ستارز https://888starz-africa.pro/
купить сухие дрова .
точные прогнозы на хоккей точные прогнозы на хоккей .
прогнозы на хоккей сегодня прогнозы на хоккей сегодня .
блочная комплектная трансформаторная подстанция transformatornye-podstancii-kupit.ru .
drenazh-na-glinistom-uchastke-spb.ru .
центр наркологической помощи http://www.narkologicheskaya-klinika-14.ru .
устройство дренажа вокруг дома .
тупиковая трансформаторная подстанция http://transformatornye-podstancii-kupit.ru/ .
пристенный дренаж вокруг дома .
кашпо пластиковое напольное кашпо пластиковое напольное .
кашпо для цветов напольное высокое кашпо для цветов напольное высокое .
где купить осиновые дрова .
Gerçekçi grafikler ve etkileyici ses efektleri, kullanıcı deneyimini önemli ölçüde artırmaktadır.
betwinner login https://betswinner.bet/
888starz orqali g’alaba qozonishni mumkin. qimor o’yinlari taqdim etadi.
bo’lishi mumkin . Ushbu platformada mumkin.
foydalanuvchilarning yordam beradi. keng ko’lamli ma’lumotlar joylashgan maqolalar mavjud.
himoya vositalarini. hisob ma’lumotlari. foydalanuvchilar mumkin.
888старз https://888starz-uzs.net/
дрова в мешках доставка .
kupit-drova-v-ramenskom-365.ru .
фабрика пошива одежды nitkapro.ru .
продвижение сайтов в москве http://poiskovoe-prodvizhenie-sajta-v-internete-moskva.ru/ .
раскрутка сайта москва раскрутка сайта москва .
Backlinks Blogs and Comments, SEO promotion, site top, indexing, links
External links of your site on forums, sections, threads.
Three-stage backlink strategy
Step 1 – Simple backlinks.
Step 2 – Backlinks through redirects from top-tier sites with PR 9–10, for example –
Phase 3 – Adding to backlink checkers –
The key benefit of analyzer sites is that they highlight the Google search engine a website structure, which is essential!
Note for the third stage – only the homepage of the site is added to SEO checkers, internal pages aren’t accepted.
I execute all three stages sequentially, resulting in 10K–20K backlinks from the full process.
This backlink strategy is the best approach.
Example of placement on analyzer sites via a TXT file.
drenazh-uchastka-vokrug-doma-spb.ru .
горшок напольный горшок напольный .
горшок высокий для цветов купить напольные горшок высокий для цветов купить напольные .
mostbet website mostbet website
продвижение сайтов в москве продвижение сайтов в москве .
888starz onlayn qimor o’yinlari orqali kengaytirish mumkin. qimor o’yinlari taqdim etadi.
bo’lishi mumkin . qimor ixlosmandlari mumkin.
o’yinchilarning yordam beradi. foydali ma’lumotlar joylashgan maqolalar mavjud.
uchun . O’yinchilarning . Shu sababli, mumkin.
888starz apk https://888starz-uzs.net/apk/
продвижение сайта продвижение сайта .
раскрутка сайта москва poiskovoe-prodvizhenie-sajta-v-internete-moskva.ru .
The Boschert Gizelis G-Cut Series options 14 heavy duty hydraulic https://shrnkme.site/roxannechau258 with a variety of maximum reducing thicknesses: from 4 mm to 20 mm in mild steel and 2mm to 12mm in stainless steel. The entire G-Cut sequence features heavy duty swing beam hydraulic shears on an all-welded-steel inflexible body. G-Cuts include specially made slicing blades suitable for various sorts of steel. Hold-down pressure changes are made robotically based mostly on required chopping strain. Hold-downs are conveniently positioned subsequent to a squaring arm for extra correct holding and chopping of small parts. Each G-Cut machine includes a excessive-pace CNC back gauge powered by AC servo motor. The G-Cut collection hydraulic shears are managed with a consumer-pleasant coloration touch display screen. Return to Front — Finished and appearance-sensitive pieces return to the operator as an alternative of behind the machine. Reduces repetitive motion. Increases effectivity, productiveness and security. Narrow Strip Cutting — An unconventional method to skinny strip shearing eliminates waste and delivers a top quality completed component almost twist-free. Auto Thickness Measurement — A simple sensor measures materials thickness to optimize blade gap. Protects your blades. Eliminates guess work. Reduces waste and downtime from fold-over jams. Safer, simpler, extra environment friendly.
стороны swot анализа swot анализ оценки
prodazha-drov-sergiev-posad.ru .
компании занимающиеся продвижением сайтов [url=http://www.internet-agentstvo-prodvizhenie-sajtov-seo.ru]компании занимающиеся продвижением сайтов[/url] .
[url=https://www.kupit-drova-v-serpuhove-365.ru]kupit-drova-v-serpuhove-365.ru[/url] .
поисковое seo в москве http://poiskovoe-prodvizhenie-sajta-v-internete-moskva.ru/ .
продвижение в google internet-agentstvo-prodvizhenie-sajtov-seo.ru .
купить недорогие колотые дрова цена .
дренаж участка под ключ цена ленобласть 8 соток .
стоимость дренажа .
zamonaviy usullar orqali kengaytirish mumkin. Bu o’yin maydoni taqdim etadi.
turli xil formatlarda . o’yin jarayonidan mumkin.
foydasini yordam beradi. O’yinlar joylashgan bloglar mavjud.
himoya vositalarini. shaxsiy ma’lumotlari . foydalanuvchilar mumkin.
888starz uzb https://888starz-uzs.net/
mostbet skachat iphone mostbet skachat iphone
продвижение сайта продвижение сайта .
блог агентства интернет-маркетинга https://www.statyi-o-marketinge1.ru .
профессиональное продвижение сайтов https://www.poiskovoe-prodvizhenie-sajta-v-internete-moskva.ru .
zakazat-drova-sergiev-posad.ru .
статьи про digital маркетинг статьи про digital маркетинг .
блог о рекламе и аналитике http://www.blog-o-marketinge.ru/ .
дрова 25 см купить .
лучшие нейросети для придумывания поговорок
новые нейросети
купить дрова липы .
kupit-drova-v-podolske-365.ru .
zakazat-drova-sergiev-posad.ru .
mostbet. uz https://mostbet4170.ru
веб-аналитика блог https://blog-o-marketinge.ru .
статьи о маркетинге статьи о маркетинге .
лечение зависимостей http://www.narkologicheskaya-klinika-13.ru .
mostbet uz yuklab olish android mostbet4170.ru
порно русской девушки порно русской женщины
Want to have fun? porno girl Watch porn, buy heroin or ecstasy. Pick up whores or buy marijuana. Come in, we’re waiting
Новые актуальные секретные промокоды iherb для выгодных покупок! Скидки на витамины, БАДы, косметику и товары для здоровья. Экономьте до 30% на заказах, используйте проверенные купоны и наслаждайтесь выгодным шопингом.
seo блог seo блог .
mostbet android yukle mostbet android yukle
продвижение обучение http://www.kursy-seo-1.ru .
учиться seo http://kursy-seo-2.ru/ .
mostbet qeydiyyat necə olur http://www.mostbet4145.ru
медицинский наркологический центр narkologicheskaya-klinika-13.ru .
kupit-drova-v-samare-365.ru .
[url=http://www.drova-kolotye-bereza-sergiev-posad.ru]вязанка дров цена[/url] .
[url=http://kupit-drova-v-samare-365.ru]купить куб березовых дров[/url] .
купить дрова березовые колотые с доставкой .
kupit-drova-v-samare-365.ru .
контекстная реклама статьи контекстная реклама статьи .
лучшие нейросети для сочинений
seo с нуля http://kursy-seo-1.ru/ .
airplane game money aviator-igra-2.ru .
seo интенсив https://kursy-seo-2.ru/ .
mostbet.com https://mostbet4173.ru
jugar aviator https://www.aviator-igra-1.ru .
авиатор 1win авиатор 1win .
проект перепланировки квартиры цена москва proekt-pereplanirovki-kvartiry8.ru .
лучшие нейросети для учёбы
авиатор играть авиатор играть .
авиатор 1win авиатор 1win .
лучшие нейросети для решения задач
лучшие нейросети для кодинга
авиатор 1 win авиатор 1 win .
лучшие нейросети для написания эссе
мостбет бк вход https://www.mostbet12004.ru
регистрация перепланировки регистрация перепланировки .
Link building for Google
I build backlinks to your page,
The placement is secure for your domain!
Publishing occurs in allowed locations.
Backlinks are published based on the up-to-date resource database. The database contains a large number of credible domains and high-traffic sites.
See an increase in the number through majestic or with ahrefs
I generate a report in the form of screenshots of WHAT WAS and WHAT became
I deliver a full report via majestic or through ahrefs , if there are fewer links on one platform, then I draw up a report on the service, with more links due to indexing lags.
We are available using keywords: backlink service
kupit-drova-v-chelyabinske-365.ru .
бк мостбет [url=mostbet12004.ru]бк мостбет[/url]
перепланировка услуги http://soglasovanie-pereplanirovki-kvartiry17.ru/ .
bot 1win lucky jet https://www.1win12004.ru
1вин контора https://1win12004.ru
perfumes de mujer originales
Luxtor Peru: Tienda Online con mas de 10,000 productos originales en perfumes, cuidado personal, maquillaje, electrohogar y ofertas exclusivas.
1win.online http://www.1win12008.ru
drenazh-pod-uchastkom-spb.ru .
drenazh-pod-uchastkom-spb.ru .
займ онлайн с плохой историей займ онлайн на карту срочно
займ на карту онлайн мгновенно займы онлайн 2025
скачать 1вин официальный сайт 1win12008.ru
ofertas perfumes importados Peru
Luxtor Peru: Tienda Online con mas de 10,000 productos originales en perfumes, cuidado personal, maquillaje, electrohogar y ofertas exclusivas.
[url=https://kupit-drova-v-arhangelske-365.ru]kupit-drova-v-arhangelske-365.ru[/url] .
мостбет вход официальный сайт http://mostbet12010.ru/
мостеб мостеб
дрова цена .
мостбет ставки на исход https://mostbet12013.ru/
купить дрова в сетках .
drenazhnye-raboty-spb.ru .
дренаж здания .
перевод документов онлайн бюро переводов документов
mostbet skacat https://mostbet12014.ru
дрова осина купить .
mostbet регистрация через официальный сайт http://www.mostbet12014.ru
drova-berezovye-kolotye-spb.ru .
сколько стоит 2 куба дров .
мостбет обман или нет мостбет обман или нет
perfumes Natura Peru
Luxtor Perú es tu tienda online de confianza con más de 10,000 artículos en perfumes importados y originales, maquillaje, cuidado personal y electrohogar, ofreciendo las mejores marcas como Natura, Yanbal, Cyzone, Ésika, L’Bel y Avon con precios especiales y promociones exclusivas.
buy weed prague cocain in prague fishscale
buy coke in prague high quality cocaine in prague
buy coke in telegram columbian cocain in prague
оригинальные кашпо горшки для цветов https://dizaynerskie-kashpo-nsk.ru/ .
buy xtc prague cocain in prague fishscale
стильные горшки http://www.dizaynerskie-kashpo-nsk.ru .
drenazh-uchastka-spb.ru .
drova-nedorogo-spb.ru .
drova-nedorogo-spb.ru .
Amazing loads of useful knowledge!
Also visit my web site — https://www.lesara.de/
kupit-drova-v-kazani-365.ru .
Подготовка уставных документов .
buy coke in prague vhq cocaine in prague
buy cocaine in telegram cocain in prague from dominican republic
buhgalteriya-autsorsing-812.ru .
coke in prague coke in prague
kupit-drova-v-nizhnem-novgorode-365.ru .
дрова колотые береза цена .
микрозаймы все микрозаймы все .
медицинская аппаратура http://www.medicinskoe-oborudovanie-77.ru .
поставка медицинского оборудования http://medicinskoe-oborudovanie-213.ru .
дрова недорого .
autsorsing-buhgalterii-ip-812.ru .
поставщик медицинского оборудования https://medicinskoe-oborudovanie-77.ru/ .
медицинская аппаратура https://medicinskoe-oborudovanie-213.ru .
Hello friends,
if you are looking for a reliable online casino,
I can recommend some cool options.
These sites have promo offers,
secure payments, and endless entertainment.
Check them out:
WinRolla Casino
Wishing you wins ??
Hello mates,
if you are searching for a reliable online casino,
I can suggest some cool options.
These casinos have promo offers,
quick withdrawals, and a huge choice of games.
Check them out:
https://nagad88-casino.app
Good luck ??
дрова сосна цена за куб .
проектирование глубинного водопонижения http://proektirovanie-vodoponizheniya.ru .
горшок с автополивом большой http://www.kashpo-s-avtopolivom-kazan.ru .
bannye-drova-noginsk.ru .
дрова недорого .
bannye-drova-noginsk.ru .
купить куб березовых дров .
стоимость проектирования водопонижения стоимость проектирования водопонижения .
buhgalteriya-autsorsing-spb-811.ru .
проект осушения котлована https://proekt-na-vodoponizhenie.ru .
Website https://tione.ru/ .
заказать проект водопонижения заказать проект водопонижения .
проект осушения котлована проект осушения котлована .
проект на водопонижение https://proekt-na-vodoponizhenie.ru/ .
drova-berezovye-kolotye-49651.ru .
kupit-drova-v-setkah-sergiev-posad.ru .
Нужен чертеж? https://chertezhi-kurs.ru выполним чертежи для студентов на заказ. Индивидуальный подход, грамотное оформление, соответствие требованиям преподавателя и высокая точность.
купить дрова самые дешевые .
проект открытого водопонижения https://www.proekt-na-vodoponijenie.ru .
дрова на паллетах с доставкой купить .
проектирование водопонижения иглофильтровыми установками проектирование водопонижения иглофильтровыми установками .
стоимость сухих дров .
coke in prague buy drugs in prague
заказать дрова с доставкой .
buhgalteriya-na-autsorsinge-usn-812.ru .
монтаж котла отопления в доме монтаж котла отопления в доме .
buhgalteriya-na-autsorsinge-usn-812.ru .
buhgalteriya-na-autsorsinge-usn-812.ru .
проектирование глубинного водопонижения https://vodoponizhenie-proekt.ru/ .
цветочный горшок с автополивом купить цветочный горшок с автополивом купить .
смотреть фильмы бесплатно смотреть фильмы бесплатно .
стоимость монтажа газовых котлов отопления стоимость монтажа газовых котлов отопления .
официальные займы онлайн на карту бесплатно http://zaimy-11.ru .
zakazat-drova-noginsk.ru .
prodazha-drov-spb.ru .
zakazat-drova-noginsk.ru .
prodazha-drov-spb.ru .
заказать телефон samsung https://kupit-telefon-samsung-1.ru .
займы онлайн займы онлайн .
apple airpods купить спб http://naushniki-apple-1.ru/ .
все микрозаймы все микрозаймы .
otdat-buhgalteriyu-na-autsorsing-812.ru .
Подготовка уставных документов .
prodazha-drov-spb.ru .
otdat-buhgalteriyu-na-autsorsing-812.ru .
кашпо для сада купить https://www.ulichnye-kashpo-kazan.ru .
airpods max купить спб https://naushniki-apple-1.ru .
займы все онлайн http://zaimy-25.ru/ .
сделать свой значок печать значков
изготовление значков из металла печать значков на заказ москва
за1мы онлайн http://www.zaimy-19.ru .
студия подкастов спб студия подкастов спб .
дрова камерной сушки купить .
самсунг спб kupit-telefon-samsung-1.ru .
купить airpods 2 черная пятница http://naushniki-apple-1.ru/ .
kupit-drova-berezovye-noginsk.ru .
видеостудия для подкастов http://studiya-podkastov-spb1.ru/ .
zakazat-drova-spb.ru .
кубометр дров цена .
аренда мини экскаватора без оператора arenda-mini-ekskavatora-v-moskve.ru .
аутсорсинг стоимость бухгалтерских услуг .
udalennaya-buhgalteriya-autsorsing-812.ru .
ставки прогнозы на спорт https://www.stavka-10.ru .
аренда экскаватора погрузчика цена москва аренда экскаватора погрузчика цена москва .
спортивные трансляции novosti-sporta-15.ru .
новости спорта https://novosti-sporta-16.ru/ .
прогнозы на спорт на сегодня прогнозы на спорт на сегодня .
XPoker Malaysia
съемка подкастов съемка подкастов .
аренда мини-экскаватора http://arenda-mini-ekskavatora-v-moskve.ru .
съемка подкаста под ключ http://studiya-podkastov-spb.ru/ .
прогнозы ставки http://stavka-10.ru .
новости хоккея novosti-sporta-16.ru .
спортивные аналитики https://novosti-sporta-17.ru .
прогноз ставок на футбол https://www.prognozy-na-futbol-9.ru .
аренда экскаватора москва и московская http://www.arenda-ekskavatora-pogruzchika-cena.ru .
прогнозы ру stavka-12.ru .
ставка прогноз ру http://www.stavka-10.ru .
новости спорта россии http://www.novosti-sporta-15.ru .
uslugi-autsorsinga-buhgalterii-811.ru .
новости легкой атлетики http://www.novosti-sporta-17.ru .
новости футбольных клубов novosti-sporta-16.ru .
kupit-drova-v-setkah-noginsk.ru .
точные прогнозы на спорт точные прогнозы на спорт .
drova-kolotye-bereza-spb.ru .
Консультации бухгалтера онлайн .
дрова сухие колотые с доставкой .
машина дров цена .
Pirámide de enlaces SEO
Estrategia de backlinks SEO en 3 etapas: hasta 30,000 enlaces de calidad superior, informes en Majestic y plan progresivo para mejorar tu ranking en Google. Planes desde 180
Etapa 1 – Enlaces básicos
Etapa 2 – Backlinks con redirecciones de fuentes autorizadas, por ejemplo
Etapa 3 – Inserción en webs de analítica, por ejemplo
Explicación de la etapa 3: únicamente se incluye la página principal del sitio en los analizadores; no es posible añadir páginas internas
Las tres etapas se realizan de manera secuencial, con un total de diez mil a treinta mil backlinks provenientes de los tres niveles
Esta estrategia de pirámide de enlaces es altamente efectiva
Lista de 40 analizadores
Precios:
Basic – 180$ – 10000 Backlinks
Standard – 200$ – 20000 Backlinks
Premium – 220$ – 30000 Backlinks
Spintax de artículos para garantizar que cada publicación sea única — 30$
kupit-drova-v-setkah-noginsk.ru .
стоимость кубометра дров .
прогноз ставок на футбол prognozy-na-futbol-10.ru .
прогнозы ставки прогнозы ставки .
спортивные новости https://novosti-sporta-16.ru .
новости киберспорта http://www.novosti-sporta-15.ru .
самые точные прогнозы на хоккей самые точные прогнозы на хоккей .
прогноз на хоккей сегодня прогноз на хоккей сегодня .
медицинские приборы https://www.xn—-7sbcejdfbbzea0axlidbbn0a0b5a8f.xn--p1ai .
усиление углеволокном http://www.dpcity.ru/usilenie-betona-uglevoloknom-fundamentov-svayami-i-gruntov-inektirovaniem-yuviks-grupp-spb// .
melbet казино слоты скачать melbet казино слоты скачать .
усиление грунтов http://www.privetsochi.ru/blog/realty_sochi/93972.html .
ленинградские кухни http://www.kuhni-spb-2.ru/ .
кухни на заказ санкт петербург http://www.kuhni-spb-1.ru .
хоккей прогнозы на сегодня хоккей прогнозы на сегодня .
стоимость 1 м3 дров .
kupit-drova-kolotye-49651.ru .
сколько стоит куб рубленных дров .
vedenie-buhgalterii-autsorsing-811.ru .
дрова 25 30 см купить .
мед оборудование мед оборудование .
дрова оптом цена .
kupit-drova-kolotye-49651.ru .
рабочее зеркало мелбет рабочее зеркало мелбет .
кухни на заказ в спб цены kuhni-spb-1.ru .
прогнозы хоккей прогнозы хоккей .
melbet зеркало melbet зеркало .
где заказать кухню в спб где заказать кухню в спб .
Запросы Запросы .
усиление грунтов http://www.privetsochi.ru/blog/realty_sochi/93972.html/ .
кухни на заказ петербург https://kuhni-spb-2.ru/ .
кухни в спб от производителя https://www.kuhni-spb-1.ru .
психолог нарколог в москве http://narkologicheskaya-klinika-20.ru .
услуги вывода из запоя на дому http://www.narkolog-na-dom-1.ru .
спорт сегодня спорт сегодня .
спортивные события http://www.sport-novosti-2.ru .
новости мирового спорта новости мирового спорта .
новости мирового спорта новости мирового спорта .
амбулаторный нарколог на дому narkolog-na-dom-1.ru .
частная клиника наркологическая http://www.narkologicheskaya-klinika-20.ru/ .
pogreb-plastikovyj-dlya-dachi-ceny-spb.ru .
lembah88
Lembah88: Platform Game Online Terpercaya dengan Akses Login Cepat dan Aman
Dalam era digital yang serba cepat ini, kebutuhan akan hiburan online semakin meningkat. Salah satu platform yang kini banyak diperbincangkan oleh para pemain adalah lembah88 — sebuah situs game online yang menawarkan pengalaman bermain seru, aman, dan mudah diakses.
Kenali Apa Itu Lembah88
Lembah88 merupakan platform game online yang menghadirkan berbagai jenis permainan menarik untuk para penggemar hiburan digital. Mulai dari permainan klasik hingga game modern dengan fitur interaktif, semua bisa dinikmati hanya dengan satu akun. Dengan tampilan yang sederhana namun elegan, lembah88 memberikan kenyamanan maksimal bagi pengguna baru maupun pemain berpengalaman.
Keunggulan Lembah88 Login
Proses lembah88 login dirancang untuk memberikan kemudahan dan keamanan tingkat tinggi. Pengguna hanya perlu memasukkan nama pengguna dan kata sandi untuk langsung mengakses akun mereka. Selain itu, sistem keamanan di lembah88 telah dilengkapi dengan enkripsi data canggih, memastikan bahwa informasi pribadi dan transaksi pengguna selalu terlindungi dari potensi ancaman digital.
Beberapa keunggulan utama dari sistem login lembah88 antara lain:
Keamanan data terjamin dengan sistem enkripsi modern
Akses cepat dan responsif tanpa gangguan
Dapat diakses melalui berbagai perangkat seperti desktop, tablet, dan smartphone
Pengalaman Bermain di Lembah88
Setelah berhasil melakukan lembah88 login, pengguna dapat langsung menikmati berbagai pilihan permainan yang menarik. Dengan server yang stabil dan tampilan antarmuka yang ramah pengguna, lembah88 memberikan pengalaman bermain yang lancar tanpa hambatan. Selain itu, tersedia juga berbagai promo dan bonus menarik untuk para anggota aktif yang rutin bermain di platform ini.
Kesimpulan
Lembah88 adalah pilihan tepat bagi siapa pun yang mencari platform game online dengan akses cepat, tampilan modern, dan sistem keamanan yang terpercaya. Melalui lembah88 login, setiap pengguna dapat langsung menikmati hiburan berkualitas kapan saja dan di mana saja.
pogreb-plastikovyj-dlya-dachi-ceny-spb.ru .
спорт сегодня спорт сегодня .
pogreb-plastikovyj-dlya-dachi-ceny-spb.ru .
дрова ольха купить .
прогнозы футбола точные на сегодня https://www.kompyuternye-prognozy-na-futbol24.ru .
результаты матчей результаты матчей .
свежие новости спорта свежие новости спорта .
наркологические клиники в москве частные https://narkologicheskaya-klinika-20.ru/ .
зависимость лечение на дому http://narkolog-na-dom-1.ru/ .
спортивные новости спортивные новости .
kupit-suhie-drova-49651.ru .
kupit-suhie-drova-49651.ru .
профессиональные прогнозы на спорт https://kompyuternye-prognozy-na-futbol23.ru/ .
kupit-suhie-drova-49651.ru .
новости киберспорта новости киберспорта .
спорт 24 часа http://www.sport-novosti-2.ru/ .
точный прогнозы на футбол точный прогнозы на футбол .
наркологические клиники в москве http://www.narkologicheskaya-klinika-20.ru .
лечение зависимости на дому http://narkolog-na-dom-1.ru/ .
новости киберспорта новости киберспорта .
установка пластиковых погребов под ключ .
березовые дрова цена за куб с доставкой .
прогнозы на хоккей от профессионалов бесплатно http://www.luchshie-prognozy-na-khokkej9.ru .
спорт сегодня спорт сегодня .
proqnozi na futbol https://www.kompyuternye-prognozy-na-futbol24.ru .
машина дров цена .
Aumentará la confianza en el sitio web
Nivel de autoridad del dominio (DR de Ahrefs)
Aumentará la credibilidad en el sitio web.
El ranking de tu sitio web es fundamental para el SEO.
Nos dedicamos a atraer bots de rastreo de Google a tu sitio para aumentar su ranking.
Existen dos tipos principales de bots de Google:
Robots de exploración – los primeros en entrar al sitio.
Indexadores automáticos – actúan según las órdenes de los bots de rastreo.
Mientras más visitas realicen estos robots a tu sitio, mayor será tu visibilidad.
Antes de comenzar, te mostraremos una imagen del DR desde Ahrefs.
Después de concluir el trabajo, también obtendrás una captura nueva del rating de tu sitio en Ahrefs.
Pago basado en resultados.
Tiempo estimado de entrega: de unos días hasta dos semanas.
El servicio se aplica a sitios con DR máximo de 50.
Para procesar tu pedido necesitamos:
La URL de tu página.
Una frase objetivo.
Las plataformas sociales quedan excluidas del servicio.
dostavka-drov-na-dachu-chekhov.ru .
доставка алкоголя москва 24/7 доставка алкоголя москва 24/7 .
новости спорта россии http://www.sport-novosti-2.ru/ .
прочистка канализации цена https://chistka-zasorov-kanalizatsii.kz .
apple airpods купить спб https://naushniki-apple-1.ru/ .
ставки на хоккей сегодня прогнозы точные http://www.luchshie-prognozy-na-khokkej9.ru/ .
купить кубометр дров .
доставка алкоголя на дом круглосуточно доставка алкоголя на дом круглосуточно .
перепланировка квартир https://www.masa.forum24.ru/?1-16-0-00004264-000-0-0-1759819670 .
купить дрова самые дешевые .
школа seo http://www.kursy-seo-2.ru .
курсы seo курсы seo .
курс seo kursy-seo-4.ru .
гидроизоляция подвала устройство гидроизоляция подвала устройство .
согласованию перепланировки нежилого помещения http://www.cah.forum24.ru/?1-13-0-00002795-000-0-0 .
plastikovye-pogreba-ot-proizvoditelya-spb.ru .
заказать дрова .
перепланировка офиса согласование http://www.airlady.forum24.ru/?1-7-0-00004806-000-0-0-1759819216 .
погреб под ключ цена .
перепланировка нежилого помещения svstrazh.forum24.ru/?1-15-0-00000267-000-0-0 .
регистрация перепланировки нежилого помещения pereplanirovka-nezhilogo-pomeshcheniya8.ru .
melbet — paris sportif pronostic foot gratuit
melbet telecharger pronostics du foot
1xbet africain pariez sur le foot
устройство обмазочной гидроизоляции http://www.ustroystvo-gidroizolyacii-1.ru .
согласование перепланировок нежилых помещений http://www.pereplanirovka-nezhilogo-pomeshcheniya10.ru .
перепланировка нежилого помещения в нежилом здании перепланировка нежилого помещения в нежилом здании .
согласование перепланировки нежилого здания pereplanirovka-nezhilogo-pomeshcheniya9.ru .
аренда грузоподъемной техники аренда грузоподъемной техники .
карниз для штор с электроприводом карниз для штор с электроприводом .
мини экскаватор цена за час arenda-mini-ekskavatora-v-moskve-2.ru .
перепланировка офиса согласование перепланировка офиса согласование .
согласование перепланировки нежилого здания https://pereplanirovka-nezhilogo-pomeshcheniya9.ru/ .
zakazat-drova-noginsk.ru .
zakazat-drova-chekhov.ru .
zakazat-drova-noginsk.ru .
потолочкин в каждый дом natyazhnye-potolki-samara-2.ru .
Website https://church-bench.ru/ .
натяжные потолки нижний новгород дешево натяжные потолки нижний новгород дешево .
потолка http://www.stretch-ceilings-nizhniy-novgorod.ru .
фитнес клуб с бассейном фитнес клуб цены
потолочник отзывы натяжные потолки https://stretch-ceilings-nizhniy-novgorod.ru/ .
студия для записи подкастов студия для записи подкастов .
организация онлайн трансляции организация онлайн трансляции .
займер ру займер ру .
аренда мини экскаватора в москве цена аренда мини экскаватора в москве цена .
услуги экскаватора погрузчика в москве услуги экскаватора погрузчика в москве .
обзор спортивных событий https://novosti-sporta-15.ru .
последние новости спорта http://novosti-sporta-16.ru/ .
ставка прогноз ру http://www.stavka-10.ru .
самсунг купить спб самсунг купить спб .
диагностика двигателей аудит http://www.vc.ru/id5379722/2274350-remont-dvigateley-acura-audi-bmw-i-drugikh-v-moskve/ .
капремонт двигателей http://www.dzen.ru/a/ao5jcsrfueyawtpn/ .
стоимость перепланировки https://stoimost-soglasovaniya-pereplanirovki-kvartiry.ru/ .
проект перепланировки проект перепланировки .
перепланировка офиса http://soglasovanie-pereplanirovki-kvartiry3.ru/ .
регистрация перепланировки регистрация перепланировки .
проект перепланировки стоимость москва http://www.proekt-pereplanirovki-kvartiry17.ru/ .
точные прогнозы на хоккей https://prognozy-na-khokkej4.ru .
футбол ставки prognozy-na-futbol-10.ru .
Курсы подготовки к ЕГЭ по информатике https://courses-ege.ru
afrik foot pronostic telecharger 1xbet pour android
техническая доска https://injenernayadoska.ru/
Все больше людей выбирают инженерную доску. Данный материал отлично вписывается в любой интерьер.
Во-первых, инженерная доска отличается высокой прочностью и долговечностью. Этот материал не подвержен механическим повреждениям и хорошо противостоит износу.
Кроме этого, инженерная доска легко монтируется. Вы сможете самостоятельно уложить этот материал без помощи профессионалов.
В завершение, можно отметить, что инженерная доска представлена в разнообразии. Вы найдете множество текстур и оттенков, что позволит выбрать идеальный вариант для вашего дома.
проект на перепланировку квартиры цена https://www.proekt-pereplanirovki-kvartiry11.ru .
оборудование медицинское оборудование медицинское .
клиника наркологическая платная http://www.narkologicheskaya-klinika-20.ru .
согласование перепланировки квартиры москва согласование перепланировки квартиры москва .
новости футбола новости футбола .
заказать алкоголь круглосуточно alcoygoloc.ru .
Профессиональный ремонт подъемников москва http://podemniki-st.ruремонт подъемников москва гарантирует безопасность и долговечность вашего оборудования.
Оригинальные компоненты могут значительно увеличить долговечность подъемника.
продвижение сайта москва продвижение сайта москва .
marketing agency seo http://www.reiting-runeta-seo.ru .
компании по продвижению сайтов компании по продвижению сайтов .
рейтинг seo агентств москвы рейтинг seo агентств москвы .
seo agency ranking http://reiting-seo-kompaniy.ru/ .
топ 10 сео продвижение топ 10 сео продвижение .
сео компания москва http://www.seo-prodvizhenie-reiting-kompanij.ru .
агентство по продвижению сайтов агентство по продвижению сайтов .
top rated seo top rated seo .
лучший сервис по ремонту двигателей в москве dzen.ru/a/aO5JcSrFuEYaWtpN .
кухня на заказ спб от производителя недорого http://kuhni-spb-2.ru/ .
техническое задание перевод https://teletype.in/@alexd78/HN462R01hzy .
юридический перевод http://www.teletype.in/@alexd78/HN462R01hzy .
список seo агентств [url=www.reiting-seo-kompaniy.ru]www.reiting-seo-kompaniy.ru[/url] .
1xbet g?ncel http://1xbet-giris-2.com .
1x bet giri? http://www.1xbet-giris-3.com .
1 xbet http://1xbet-giris-2.com .
1xbet mobi http://1xbet-giris-3.com .
one x bet one x bet .
1 xbet giri? http://1xbet-giris-8.com/ .
1x lite 1xbet-giris-7.com .
1xbet g?ncel http://www.1xbet-giris-1.com .
1 xbet 1 xbet .
1xbet ?yelik 1xbet ?yelik .
1xbet giri? g?ncel 1xbet giri? g?ncel .
Literature students often buy critical essay papers to meet tight deadlines.
When deadlines hit, some people simply [url=https://eliteessayworks.com/]just buy essay[/url] and move on.
1xbet turkiye 1xbet turkiye .
1xbet 1xbet-4.com .
steroid medicines names
References:
https://git.rankenste.in/earlenebrauer
strongest legal steroid on the market
References:
https://nrisoulmate.com/@greggoodson020
xbet xbet .
1xbet resmi https://1xbet-10.com/ .
кухни на заказ в спб цены http://www.kuhni-spb-2.ru .
1 xbet giri? https://www.1xbet-13.com .
1xbet g?ncel giri? 1xbet g?ncel giri? .
медтехника http://www.medicinskaya-tehnika.ru .
поставщик медоборудования https://medoborudovanie-postavka.ru .
клиника наркологии москва http://narkologicheskaya-klinika-24.ru/ .
поставщик медицинского оборудования поставщик медицинского оборудования .
клиника наркологии москва http://www.narkologicheskaya-klinika-23.ru .
медицинская аппаратура медицинская аппаратура .
1xbet mobi 1xbet mobi .
клиника наркология [url=https://narkologicheskaya-klinika-24.ru/]https://narkologicheskaya-klinika-24.ru/[/url] .
психолог нарколог психолог нарколог .
Веб сайт https://urkarl.ru/
гидроизоляция подвала гидроизоляция подвала .
обмазочная гидроизоляция цена обмазочная гидроизоляция цена .
торкретирование бетона цена торкретирование бетона цена .
торкретирование цена за м2 https://torkretirovanie-1.ru/ .
букмекерская контора мелбет букмекерская контора мелбет .
oral hgh kaufen
References:
https://pads.jeito.nl/aZ5qygsPSlil9sxFk9rfYg/
бк мелбет бк мелбет .
усиление ссылок переходами http://www.optimizaciya-i-seo-prodvizhenie-sajtov-moskva-1.ru/ .
stereo clock radio alarm http://alarm-radio-clocks.com .
блог о рекламе и аналитике http://www.statyi-o-marketinge7.ru .
школа seo http://kursy-seo-11.ru .
обучение продвижению сайтов обучение продвижению сайтов .
seo базовый курc kursy-seo-12.ru .
продвижение обучение http://www.kursy-seo-12.ru .
электрокранизы http://elektrokarniz797.ru/ .
нат потолки http://natyazhnye-potolki-nizhniy-novgorod-1.ru .
электрокарниз москва https://elektrokarniz-kupit.ru .
рулонные шторы на кухню купить рулонные шторы на кухню купить .
жалюзи под ключ жалюзи под ключ .
Bu saytda olmaq çox maraqlıdır.
https://1winazerbaijan.biz/
карниз с приводом https://elektrokarniz797.ru/ .
Bu saytda olmaq çox rahatdır.
https://1win-az.tech
электрокарниз купить в москве электрокарниз купить в москве .
потолочников потолочников .
рулонные шторы на окна цена рулонные шторы на окна цена .
заказать онлайн трансляцию заказать онлайн трансляцию .
онлайн трансляция заказать zakazat-onlayn-translyaciyu5.ru .
сделать онлайн трансляцию мероприятия [url=http://www.zakazat-onlayn-translyaciyu4.ru]http://www.zakazat-onlayn-translyaciyu4.ru[/url] .
организация онлайн трансляции мероприятия организация онлайн трансляции мероприятия .
рейтинг компаний по продвижению сайтов рейтинг компаний по продвижению сайтов .
Сразу к лучшему сюда: https://1newss.com/obshhestvo/sovremennye-tehnologii-pechati-kalendarej-i-ih-osobennosti.html
See details: https://kudaniglian.ru/2025/10/27/Надежный-магазин-аккаунтов-google-ads/
top 10 seo http://reiting-seo-agentstv.ru/ .
кто такой сео в компании кто такой сео в компании .
печать на футболках оптом https://telegra.ph/Mir-korporativnoj-atributiki-polnyj-gid-po-uslugam-pechati-10-28 .
фирмы по продвижению сайтов http://www.reiting-kompanii-po-prodvizheniyu-sajtov.ru .
seo ranking services http://www.reiting-seo-kompaniy.ru/ .
seo продвижение сайта агентство seo продвижение сайта агентство .
seo agencies ranking seo agencies ranking .
1xbet spor bahislerinin adresi https://1xbet-giris-2.com .
1xbet g?ncel 1xbet g?ncel .
рейтинг агентств москвы http://www.luchshie-digital-agencstva.ru/ .
школа изучения английского языка http://smolensk-i.ru/partners/kak-vybrat-shkolu-dlya-kachestvennogo-izucheniya-anglijskogo_611258/ .
Веб сайт https://urkarl.ru/
школа изучения английского языка https://www.asbest.name/forum/31-14770-1 .
asbest.name http://www.salda.ws/f/topic.php?p=239434 .
согласование перепланировки в нежилом здании http://pereplanirovka-nezhilogo-pomeshcheniya18.ru .
smart way http://www.sajt-smart-way.ru/ .
стеклянные ограждения +для лестницы http://www.teletype.in/@alexd78/Ah1RK_-IAU2 .
ремонт двигателей Hyundai http://www.telegra.ph/Dvigovichkoff—professionalnyj-remont-dvigatelej-v-Moskve-dlya-avtomobilej-premialnyh-marok-10-14 .
аренда экскаватора погрузчика в москве срочно arenda-ekskavatora-pogruzchika-2.ru .
реквизит и свет для подкастов реквизит и свет для подкастов .
аренда экскаватора погрузчика в москве аренда экскаватора погрузчика в москве .
аренда студии для записи подкаста studiya-podkastov-spb4.ru .
1x giri? [url=www.1xbet-9.com/]www.1xbet-9.com/[/url] .
Удобная платформа kazino olimp — люблю заходить сюда!
http://rlu.ru/5cPJJ
поставка медоборудования https://medoborudovanie-postavka.ru/ .
оборудование медицинское оборудование медицинское .
1x bet 1x bet .
1xbet com giri? http://www.1xbet-12.com .
1xbet t?rkiye 1xbet t?rkiye .
подвал дома ремонт https://www.gidroizolyaciya-cena-8.ru .
торкретирование стен цена torkretirovanie-1.ru .
birxbet birxbet .
автоматические гардины для штор http://www.elektrokarniz797.ru/ .
ремонт подвала в частном доме http://gidroizolyaciya-cena-8.ru .
торкрет бетон цена торкрет бетон цена .
наркология анонимно http://narkologicheskaya-klinika-27.ru/ .
производство одежды спб http://arbuztech.ru/ .
стоимость гидроизоляции подвала стоимость гидроизоляции подвала .
торкрет бетон цена торкрет бетон цена .
электрические гардины электрические гардины .
медтехника medicinskaya-tehnika.ru .
электропривод рулонных штор rulonnye-shtory-s-elektroprivodom7.ru .
рулонные шторы с электроприводом рулонные шторы с электроприводом .
1xbet giri? adresi 1xbet-giris-2.com .
birxbet giri? 1xbet-giris-8.com .
bahis sitesi 1xbet http://1xbet-giris-2.com/ .
электрические рулонные шторы купить москва rulonnye-shtory-s-elektroprivodom7.ru .
дистанционное управление жалюзи дистанционное управление жалюзи .
рейтинг seo агентств рейтинг seo агентств .
швейная фабрика в питере arbuztech.ru .
маркетинг в интернете блог http://statyi-o-marketinge6.ru .
швейное производство санкт петербург http://arbuztech.ru .
жалюзи на пульте жалюзи на пульте .
seo partners http://www.optimizaciya-i-seo-prodvizhenie-sajtov-moskva.ru .
стратегия продвижения блог statyi-o-marketinge6.ru .
jp99 slot online http://jp99-online.com .
surewin casino malaysia http://surewin-online.com/ .
seo top agencies reiting-seo-kompanii.ru .
valor casino login valor casino login .
jp 99 slot login http://www.jp99-online.com .
goodday casino goodday casino .
ice bet ice bet .
jp9p http://www.jp99-online.com .
apuestas valor apuestas valor .
1x bet giri? https://1xbet-7.com/ .
согласование перепланировки согласование перепланировки .
jp99 slot online https://www.jp99-online.com .
surewin casino malaysia http://www.surewin-online.com .
goodday 4play casino goodday 4play casino .
valor bet casino valor bet casino .
surewin logo surewin-online.com .
угловая душевая перегородка из стекла https://dzen.ru/a/aPfJd1pLPXEE534U .
icebet slot icebet slot .
курсы seo курсы seo .
goliath casino bewertung https://goliath-casino.com .
777bet app login 777bet app login .
кухни на заказ санкт петербург http://kuhni-spb-10.ru .
icebet casino games http://www.icebet-online.com .
обучение продвижению сайтов обучение продвижению сайтов .
кухня по индивидуальному заказу спб кухня по индивидуальному заказу спб .
юридический переводчик в москве юридический переводчик в москве .
1xbet giri? 1xbet giri? .
icebet giri? icebet giri? .
Юридические переводы от бюро Перевод и Право Юридические переводы от бюро Перевод и Право .
синхронный перевод заказать dzen.ru/a/aRDuRn3LkCngCegS .
курсы seo курсы seo .
battery aviator game apk battery aviator game apk .
it перевод telegra.ph/Oshibka-lokalizacii-pochemu-vash-IT-produkt-ne-ponimayut-za-granicej-11-09 .
aviator game https://aviator-game-deposit.com/ .
udane wala jahaj http://www.aviator-game-predict.com .
карниз с электроприводом https://www.prokarniz36.ru .
inverter game http://www.aviator-game-predict.com .
электрокарниз недорого prokarniz36.ru .
электрокарниз купить в москве elektrokarniz2.ru .
электрокарнизы москва https://elektrokarniz1.ru .
автоматические рулонные шторы с электроприводом http://www.rulonnye-shtory-s-elektroprivodom499.ru .
купить электрические рулонные шторы https://rulonnye-shtory-s-elektroprivodom499.ru/ .
рулонные электрошторы https://rulonnye-shtory-s-elektroprivodom177.ru/ .
шторы на пульте управления шторы на пульте управления .
умный дом шторы умный дом шторы .
рулонные шторы с пультом управления рулонные шторы с пультом управления .
рейтинг seo студий reiting-seo-kompanii.ru .
горизонтальные жалюзи с электроприводом горизонтальные жалюзи с электроприводом .
умные шторы умные шторы .
Super platformadır! Uğurlar!
http://fly2.cf/1win-qeydiyyat-21519
жалюзи с электроприводом купить жалюзи с электроприводом купить .
мелбет бонусы при регистрации https://melbetbonusy.ru .
мелбет мобильный сайт http://www.v-bux.ru .
kiss918 apk lama kiss918 apk lama .
1xbet yeni giri? adresi 1xbet yeni giri? adresi .
1x bet 1x bet .
рейтинг digital seo агентств https://reiting-seo-kompanii.ru .
кухни от производителя спб http://kuhni-spb-9.ru/ .
кухни спб kuhni-spb-9.ru .
aviator x aviator-game-winner.com .
aviator x aviator-game-winner.com .
ремонт квартир рейтинг ремонт квартир рейтинг .
plane crash game money download https://aviator-game-predict.com/ .
aviator money https://aviator-game-best.com .
качественный ремонт квартир в москве качественный ремонт квартир в москве .
казино слоты играть https://wwwpsy.ru .
battery aviator game apk battery aviator game apk .
лучшая компания по ремонту квартир лучшая компания по ремонту квартир .
мелбет мобильный сайт http://v-bux.ru/ .
отделка ремонт квартир москва http://www.rejting-remontnyh-kompanij-moskvy.com/ .
ремонт квартир компании luchshie-remontnye-kompanii-moskvy.com .
battery aviator game apk battery aviator game apk .
wwwpsy.ru http://www.wwwpsy.ru/ .
plane crash game money https://www.aviator-game-deposit.com .
компании по ремонту квартир москва компании по ремонту квартир москва .
???? ???? ??? aviator-game-predict.com .
строительная компания ремонт квартир http://www.luchshie-remontnye-kompanii-moskvy.com .
игровые автоматы слоты http://www.wwwpsy.ru .
лучшие сайты по ремонту квартир https://rejting-kompanij-po-remontu-kvartir-moskvy.com/ .
рулонные шторы электрические рулонные шторы электрические .
metatrader 5 metatrader 5 .
затопили квартиру что делать затопили квартиру что делать .
mt5 mt5 .
автоматические жалюзи автоматические жалюзи .
mt5 download mt5 download .
независимая экспертиза залива квартиры независимая экспертиза залива квартиры .
meta trader 5 download metatrader-5-downloads.com .
mt5 download mac http://www.metatrader-5-mac.com .
оценка ущерба после залива оценка ущерба после залива .
metatrader 5 https://metatrader-5-downloads.com .
mt5 trading platform mt5 trading platform .
mt5 mac download metatrader-5-pc.com .
определить виновника залива https://ekspertiza-zaliva-kvartiry-3.ru .
mt5 download https://www.metatrader-5-downloads.com .
metatrader 5 metatrader 5 .
Greetings!
Women’s urology and urogynecology treat stress incontinence, urge incontinence, and pelvic organ prolapse. Female pelvic floor experts guide Kegel exercises and bladder sling surgery. Pelvic floor therapy includes biofeedback and urology telemonitoring options. We offer transgender urology care and LGBTQ+ friendly urologist support. Experience dignity and expertise in every visit.
More details on the website — https://ciopucise.shop
success stories urology, urology compassion chain, weight management urology
implant recovery urology, microbiome and UTI, healing spaces urology
Good luck and good health!!
mt5 download for pc metatrader-5-sync.com .
экспертиза по заливу квартиры экспертиза по заливу квартиры .
рулонные шторы автоматические купить http://www.avtomaticheskie-rulonnye-shtory11.ru .
metatrader 5 metatrader 5 .
This may be a part of an overall pattern of increased spending on pets. https://semalt.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=https://chessdatabase.science/wiki/Everything_You_Need_To_Know_About_Audifort:_A_Comprehensive_Guide assist supplements are dietary supplements that include a combination of vitamins, minerals, and other nutrients that will assist support and maintain healthy hearing. Hawthorn also incorporates antioxidants, which might help to protect the physique from free radical injury and help general well being. Cortexi is free of GMOs, stimulants, and opioids, with optimistic critiques attesting to its safety and effectiveness. This makes it obvious that the supplement is free of any adversarial unwanted effects. Popular tinnitus supplements like Lipo Flavonoid Plus, meanwhile, haven’t any major reported instances of uncomfortable side effects, with most research suggesting the substances are protected to use. Q: Are there any unintended effects? Consulting out there plan documents or talking immediately with plan representatives can assist make clear what is included relating to hearings services before enrollment decisions are made. Tea tree oil has additionally been studied for its potential antimicrobial properties, which could help reduce the risk of ear infections contributing to hearing loss. Additionally, cayenne fruit has anti-inflammatory properties that can assist scale back inflammation within the body, including in the ears.
Minnətdaram belə əla məlumat üçün.
https://1winazpro.com/bonuslar
How Long Does It Take to Build Muscle? How long does it take to build muscle is not, of course, a question with a simple answer, despite what the TikToks or Reels promising to unlock the one thing you need to get big might suggest. In fact, they tend to raise many more questions: Like, should you be fasting? Or should you be cutting out cardio, relying solely on supersets, smashing calisthenics, attending military bootcamps, doing everything on the bosu ball, using only kettlebells, taking protein immediately after your workout, nailing creatine, eating lots and lots of beef, training at a specific heart rate, squatting with your partner on your shoulders, performing every workout without your top on, or adding a resistance band to absolutely everything? The list of suggestions goes on. There’s a gym obsession for everyone, but none of it will get you in shape the way that focusing on the (somewhat less sexy) essentials will. So let’s go back to basics.
my site: https://www.sgvavia.ru/go?https://rtvon.xyz/bookergse1
Подвесной потолок Армстронг https://www.potolok-armstrong1.ru .
покупка курсовой http://www.kupit-kursovuyu-3.ru/ .
рейтинг seo студий reiting-seo-kompanii.ru .
Подвесной потолок Армстронг http://www.potolok-armstrong1.ru .
электрокарниз электрокарниз .
независимая оценка ущерба после залива независимая оценка ущерба после залива .
заказать курсовую заказать курсовую .
курсовая работа на заказ цена курсовая работа на заказ цена .
купить курсовая работа купить курсовая работа .
купить курсовую москва купить курсовую москва .
курсовой проект купить цена курсовой проект купить цена .
психолог нарколог http://narkologicheskaya-klinika-36.ru/ .
электрожалюзи на заказ электрожалюзи на заказ .
sapporo88
зашиваться от алкоголя https://narkologicheskaya-klinika-40.ru .
клиника вывод из запоя клиника вывод из запоя .
seo продвижение рейтинг seo продвижение рейтинг .
электрические гардины http://prokarniz36.ru .
оценка ущерба при заливе квартиры оценка ущерба при заливе квартиры .
филлер купить филлер купить .
автоматические гардины для штор http://elektrokarniz1.ru/ .
карнизы с электроприводом купить карнизы с электроприводом купить .
документы для оценки ущерба после залива документы для оценки ущерба после залива .
филлер купить филлер купить .
частная наркологическая клиника в москве анонимное http://narkologicheskaya-klinika-35.ru/ .
электрокарниз купить электрокарниз купить .
карниз для штор электрический https://provorota.su/ .
карниз с приводом http://www.elektrokarniz2.ru .
электрокарниз электрокарниз .
наркологические услуги http://www.narkologicheskaya-klinika-36.ru .
электрокарниз электрокарниз .
карнизы для штор купить в москве http://provorota.su .
электрокарниз москва http://www.elektrokarniz2.ru/ .
карниз с приводом http://elektrokarniz-dlya-shtor15.ru/ .
карниз электроприводом штор купить https://elektrokarniz-dlya-shtor11.ru .
электрокарнизы цена электрокарнизы цена .
автоматический карниз для штор https://provorota.su .
В казино 1вин авиатор игроки могут наслаждаться захватывающими взлетами и множеством возможностей для выигрыша.
Обсуждение с другими игроками помогает лучше понять механики игры.
Immerse yourself in the world of exciting betting with inverter game and try your luck!
The aviator game presents a captivating casino opportunity that has intrigued a large number of participants.
рулонные шторы на большие окна рулонные шторы на большие окна .
умные шторы с алисой http://www.prokarniz27.ru .
рулонные шторы на пульте управления http://www.prokarniz28.ru .
наркология наркология .
автоматические жалюзи автоматические жалюзи .
рулонные шторы с электроприводом цена рулонные шторы с электроприводом цена .
жалюзи для пластиковых окон с электроприводом http://www.prokarniz23.ru .
отделка подвала https://gidroizolyacziya-podvala-iznutri-czena1.ru .
усиление проёма швеллером усиление проёма швеллером .
усиление проёма швеллером усиление проёма швеллером .
сырость в подвале многоквартирного дома https://gidroizolyacziya-podvala-iznutri-czena.ru .
гидроизоляция подвала компания https://gidroizolyacziya-podvala-samara.ru/ .
seo эксперт агентство http://www.reiting-seo-kompanii.ru .
вода в подвале https://gidroizolyacziya-podvala-iznutri-czena1.ru/ .
гидроизоляция подвала цена гидроизоляция подвала цена .
промокод фонбет на 15000
Промокод MAX777 одноразовый и доступен только при первой регистрации. Создание мультиаккаунтов запрещено. Код работает в РФ и регионах доступа «синего» Фонбет.
умные шторы купить умные шторы купить .
гидроизоляция подвала ремонт gidroizolyacziya-podvala-samara.ru .
гидроизоляция цена за работу гидроизоляция цена за работу .
гидроизоляция цена за работу гидроизоляция цена за работу .
инъекционная гидроизоляция многоквартирный дом inekczionnaya-gidroizolyacziya.ru .
сырость в подвале многоквартирного дома [url=https://gidroizolyacziya-podvala-iznutri-czena.ru/]https://gidroizolyacziya-podvala-iznutri-czena.ru/[/url] .
аренда навесного оборудования на экскаватор http://www.arenda-ekskavatora-pogruzchika-5.ru .
обмазочная гидроизоляция цена за работу м2 http://www.gidroizolyacziya-czena1.ru/ .
цена ремонта подвала https://www.gidroizolyacziya-podvala-iznutri-czena1.ru .
устранение протечек в подвале gidroizolyacziya-podvala-iznutri-czena.ru .
гидроизоляция подвала утепление gidroizolyacziya-podvala-samara.ru .
V?deo pornogr?fico gay negro V?deo pornogr?fico gay negro .
porn games porn games .
услуга усиления проема https://usilenie-proemov2.ru .
выполнение учебных работ https://kupit-kursovuyu-26.ru .
помощь студентам курсовые помощь студентам курсовые .
стоимость написания курсовой работы на заказ http://kupit-kursovuyu-21.ru .
помощь в написании курсовой работы онлайн помощь в написании курсовой работы онлайн .
выполнение курсовых работ выполнение курсовых работ .
написать курсовую работу на заказ в москве kupit-kursovuyu-22.ru .
playboy888
From classic casino games to modern video slots, there’s something for everyone.
aviator game online offers an exciting experience and the opportunity to win real money directly from your device.
The experience of seeing the multiplier ascend is incredibly exciting for players.
Discover a world of entertainment with 777 bet online casino, where unforgettable gaming moments and big wins await you!
Moreover, 777bet boasts a highly intuitive interface, making it accessible for both new and experienced bettors.
Spend a luxurious evening with good play 4 day!
Everyone, regardless of age, can gain from embracing a playful mindset.
Immerse yourself in the world of exciting betting with demo aviator game and try your luck!
Combining luck and strategy, this game stands out from other gambling alternatives.
Plai in aviator game download and experience the adrenaline rush with every bet!
Players must decide to cash out ahead of the plane’s departure, leading to a thrilling yet stressful experience.
Попробуйте свою удачу в авиатор игра 1win и насладитесь уникальными возможностями!
Доступность этой игры на различных платформах делает ее еще более привлекательной для пользователей.
You said this wonderfully!
Here is my blog post — https://corona-untersuchungsausschuss.org/index.php?title=Tracing_The_Pillow_Through_History:_Free_Applique_Template
http://umassindiapharm.com/# Umass India Pharm
canadian pharmacy uk delivery: canada pharmacy world — canadian pharmacy ed medications
https://umassindiapharm.com/# п»їlegitimate online pharmacies india
Umass India Pharm: Umass India Pharm — world pharmacy india
http://umassindiapharm.com/# online pharmacy india
Для максимально быстрого продвижения по карьере требуется наличие диплома о высшем образовании. Мы изготавливаем дипломы психологов, юристов, экономистов и других профессий по приятным тарифам: peterrealestatebroker.com/agent/skyegaertner8
Заказать официальный диплом университета : nec.phorum.pl/posting.php?mode=newtopic&f=27&sid=aa358651ee24fc6ec0c088de7a557401
https://umassindiapharm.xyz/# pharmacy website india
Заказать диплом о высшем образовании Никто не хотел бы потратить годы жизни на то, чтобы заполучить знания, которые уже есть. В данном случае решение о покупке диплома о высшем образовании является для вас наиболее оптимальным. И для этого вам следует сделать не так много — лишь подобрать компанию, занимающуюся изготовлением дипломов на заказ. Это позволит вам за небольшую сумму и в кратчайшие сроки заполучить диплом из любого высшего учебного заведения страны: mf.getbb.ru/viewtopic.php?f=28&t=2334
1win aviator strategiyasi 1win aviator strategiyasi
Покупка диплома ВУЗа через проверенную и надежную компанию дарит массу достоинств для покупателя. Приобрести диплом о высшем образовании: demo.pixelphotoscript.com/angelesharbin8
Мы предлагаем дипломы любых профессий по приятным тарифам. Купить диплом Березники — [url=http://topnewsgadget.ru/kupit-diplom-cherez-internet-bezopasno/]topnewsgadget.ru/kupit-diplom-cherez-internet-bezopasno[/url]
https://nyupharm.xyz/# reputable canadian online pharmacies
https://umassindiapharm.xyz/# Umass India Pharm
https://unmpharm.com/# Unm Pharm
vpower apk download
This application offers a range of features that make it appealing.
https://nyupharm.xyz/# safe reliable canadian pharmacy
Wow, this post is fastidious, my sister is analyzing these things, therefore I am going to convey her.
https://umassindiapharm.xyz/# top online pharmacy india
recommended canadian pharmacies cheapest pharmacy canada canadianpharmacyworld com
It’s actually very complicated in this full of activity life to listen news on TV, so I just use internet for that purpose, and obtain the latest news.
Получить диплом о высшем образовании поможем. Купить диплом в Смоленске — diplomybox.com/kupit-diplom-smolensk
https://unmpharm.com/# Unm Pharm
Umass India Pharm Umass India Pharm mail order pharmacy india
Мы готовы предложить дипломы любой профессии по приятным тарифам. Цена может зависеть от выбранной специальности, года получения и образовательного учреждения: l67697qa.beget.tech/2025/09/23/—4.html
Глубокий эксплейн изменённых Android-игр: mod APK, mods, хаки, free donate
Ниша мобильных игр растёт очень быстро, и одновременно перестраивается и модель поведения юзеров к играм. Если раньше большинство юзеры соглашались барьеры и донат, то теперь всё больше пользователей выбирают mod игры андроид.
Ресурсы вроде https://uksteroidsshop.com/forums/users/brigetteyoungblo/ предлагают крупный список взломанных игр на андроид, создавая целую экосистему вокруг модификаций игр. Такая тенденция создала культуру людей, которые хотят улучшенные ресурсы без доната.
Что такое взломанные APK-файлы и почему их качают
apk mod android — это оптимизированные версии оригинальных игр, в которые встроены дополнительные возможности, или отключены лимиты. Суть этих пакетов — дать игроку полную свободу в игровом процессе.
Например, хаки могут давать ресурсы, убирать ads, давать free shop. Такие настройки ценят геймеры, которым надоел донат.
Важность площадок в мире Android-модов
Порталы стали центром публикации mod игр. Они агрегируют версии, организуют его, обновляют, и предлагают скачивание игрокам. По этой причине скачивать моды стало гораздо проще.
Основные категории модов качают в нынешнее время
Динамика рынка модов постоянно меняются, и рынок модификаций подстраивается под игроков. В 2025 в топе находятся моды с free gems android. Такие взломы полностью снимают лимиты, включая весь контент без задержек.
Мощным интересом обладают моды, которые чистят игру от баннеров. Большинство игр на Android засыпаны ads, поэтому моды “no admod” стали стандартом для тысяч игроков.
Также в тренде взломы, которые делают донат нулевым. В подобных модах store работает бесплатно. Игрок может получать skins, guns, бонусы, пропуски, и всё это без вложений.
Плюсы модифицированных Android-игр
Главный плюс модов — это расширенная свобода действий. Игрок сам решает, как играть. В противоположность оригинальных APK, где каждый шаг ограничен, mod игры андроид открывают весь контент с первых минут.
Второй большой плюс — отсутствие агрессивной рекламы. Каждый второй игрок Android сталкивается с баннерами, которые раздражают. Моды обнуляют рекламу, превращая процесс комфортным.
Третье преимущество — доступ к эксклюзивным настройкам. Некоторые моды включают режим разработчика, улучшенную графику, дополнительные карты, и даже альтернативные модели. Такие версии игр могут превосходить официальные.
На что обратить внимание при скачивании модов
Несмотря на популярности модов, нужно соблюдать базовые правила безопасности. Брать apk mod следует только с проверенных площадок. Сторонние источники могут включать вирусы, что рискованно.
Важно учитывать, что некоторые игры блокируют моды. Поэтому важно скачивать только свежие версии хаки андроид, которые подходят последним версиям приложения.
Часть модов могут не запускаться в сети, если игра сравнивает параметры. Это частая практика, особенно в популярном PVP-контенте.
Итог: почему моды стали мейнстримом в 2025
Android-игры развиваются, и запрос к удобным возможностям растёт. Поэтому mod игры андроид продолжают расти. Они дают игрокам free gems android, снимают ads, и предоставляют свободу над развитием. Сайты делают доступ таких возможностей простым.
В 2025 году модифицированные игры — это не просто мода, а новый стандарт. При выборе надёжных ресурсов скачать взлом apk и наслаждаться игрой становится легко для каждого.
Заключение: моды как тренд Android-гейминга
Сегмент Android-игр меняется, и потребность игроков только увеличивается. Взломанные игры дают широкие возможности, включая улучшенные настройки, отсутствие рекламы и доступ к скрытым функциям.
Для большого числа игроков это не просто альтернатива, а инструмент экспериментов. Игроки могут исследовать весь контент, в полном объёме, что увеличивает удовольствие от игры.
Кроме того, модифицированные версии позволяют легко экспериментировать. Функции вроде free gems android позволяют ускорять прогресс, а no ads делает процесс комфортным.
Ключевое правило при использовании модификаций — разумная осторожность. Используйте только безопасные файлы, контролируйте версию игры, и игра станет безопасной и интересной. При соблюдении этих правил взломанные версии откроют новые горизонты.
Основная идея: apk mod это новая культура, который даёт свободу и повышает вовлечённость. ответственное скачивание позволяет получить всё самое лучшее и делает мобильные игры ещё более увлекательными.
https://unmpharm.xyz/# buy kamagra oral jelly mexico
https://nyupharm.xyz/# canada pharmacy world
Its like you read my mind! You seem to know so much about this, like you wrote the book in it or something. I think that you can do with a few pics to drive the message home a little bit, but other than that, this is fantastic blog. An excellent read. I will definitely be back.
Попробуйте свои силы в 1win авиатор играть, и испытайте удачу в уникальном игровом процессе!
Безопасность клиентов и честность в азартных играх — основа доверия к казино.
https://unmpharm.xyz/# Unm Pharm
https://umassindiapharm.xyz/# Umass India Pharm
https://nyupharm.com/# canadian online pharmacy
Amazing! Its actually amazing post, I have got much clear idea
concerning from this post.
https://unmpharm.xyz/# Unm Pharm
Interesting blog! Is your theme custom made or did you download it from somewhere? A theme like yours with a few simple tweeks would really make my blog stand out. Please let me know where you got your design. Appreciate it
Рекламное агентство «Glance Style» в Тамбове — ваш надёжный партнёр
в создании эффективной наружной рекламы!
Изготавливаем вывески, баннеры, объёмные буквы, световые короба,
штендеры, рекламные конструкции под ТРУ и многое другое.
Работаем с бизнесом и частными лицами — от эскиза до монтажа «под ключ».
Используем современные материалы, соблюдаем сроки и гарантируем качество.
У нас выгодные цены, индивидуальный подход и опыт более 5 лет!
Хотите, чтобы вашу рекламу замечали?
Звоните прямо сейчас или оставляйте заявку на сайте
glance68.ru — поможем вашему бизнесу засиять ярче!
Заказать наружную рекламу можно на нашем сайте.
Цены актуальны «Glance Style»
FYI, an official overview on cross-border shipping rules. It breaks down pricing differences for antibiotics. Link: п»їhttps://polkcity.us.com/# farmacias online usa.
п»їTo be honest, I discovered an informative article concerning safe pharmacy shipping. It details how to save money when buying antibiotics. If anyone wants reliable shipping to USA, go here: п»їorder from mexico. Hope it helps.
Has anybody tried safe Mexican pharmacies. I discovered a decent blog that reviews best pharmacies: п»їresource. Seems useful..
п»їJust now, I discovered a helpful page concerning generic pills from India. The site discusses WHO-GMP protocols on prescriptions. If you are looking for reliable shipping to USA, visit this link: п»їkisawyer.us.com. Hope it helps.
Does anyone know safe Mexican pharmacies. I ran into a decent post that reviews trusted vendors: п»їpolkcity.us.com. Looks legit.
Stop overpaying and save money on prescriptions, I suggest visiting this report. It shows shipping costs. Huge savings found here: п»їpurple pharmacy.
п»їLately, I stumbled upon a helpful resource about cheap Indian generics. It covers WHO-GMP protocols when buying antibiotics. For those interested in reliable shipping to USA, take a look: п»їreputable indian online pharmacy. Hope it helps.
I’ve learn several good stuff here. Definitely value bookmarking for revisiting. I wonder how so much attempt you set to create any such wonderful informative site.
п»їRecently, I discovered a useful guide about Indian Pharmacy exports. It details WHO-GMP protocols for ED medication. If you are looking for Trusted Indian sources, take a look: п»їkisawyer.us.com. Worth a read.
Stop overpaying and save on pharmacy costs, I recommend checking this page. It shows where to buy cheap. Best prices at this link: п»їhttps://polkcity.us.com/# farmacia mexicana en chicago.
п»їRecently, I found an interesting guide concerning cheap Indian generics. The site discusses the manufacturing standards for generic meds. In case you need reliable shipping to USA, visit this link: п»їinformation. Cheers.
п»їRecently, I found a useful article concerning ordering meds from India. It explains how to save money on prescriptions. If you are looking for Trusted Indian sources, read this: п»їOnline medicine order. Might be useful.
What’s up it’s me, I am also visiting this site daily, this website is really good and the viewers are really sharing pleasant thoughts.
п»їActually, I came across a helpful resource concerning buying affordable antibiotics. It covers how to save money for ED medication. In case you need reliable shipping to USA, check this out: п»їhttps://kisawyer.us.com/# best india pharmacy. Worth a read.
п»їTo be honest, I stumbled upon an interesting resource about Indian Pharmacy exports. It covers how to save money for generic meds. If you are looking for factory prices, go here: п»їhttps://kisawyer.us.com/# indian pharmacies safe. Cheers.
п»їRecently, I found an informative article about buying affordable antibiotics. It explains regulations on prescriptions. If anyone wants affordable options, check this out: п»їhttps://polkcity.us.com/# mexico online pharmacy. Good info.
п»їJust now, I came across an informative resource concerning buying affordable antibiotics. It explains how to save money on prescriptions. In case you need reliable shipping to USA, read this: п»їhttps://polkcity.us.com/# mexico drug store online. Worth a read.
п»їLately, I stumbled upon a useful page concerning cheap Indian generics. It explains the manufacturing standards on prescriptions. In case you need reliable shipping to USA, go here: п»їonline shopping pharmacy india. Might be useful.
Every weekend i used to visit this website, for the reason that i want enjoyment, for the reason that this this website conations genuinely pleasant funny data too.
п»їJust now, I stumbled upon an interesting article concerning cheap Indian generics. It covers the manufacturing standards when buying antibiotics. In case you need factory prices, take a look: п»їhttps://kisawyer.us.com/# online pharmacy india. Cheers.
п»їTo be honest, I came across a great page concerning buying affordable antibiotics. It explains CDSCO regulations for generic meds. If anyone wants Trusted Indian sources, check this out: п»їhttps://kisawyer.us.com/# india online pharmacy. Worth a read.
п»їTo be honest, I found a helpful article about ordering meds from India. It explains the manufacturing standards when buying antibiotics. If you are looking for cheaper alternatives, go here: п»їhttps://kisawyer.us.com/# mail order pharmacy india. Cheers.
Sharing, an important overview on cross-border shipping rules. It breaks down pricing differences for ED meds. Link: п»їpharmacy in mexico.
WOW just what I was looking for. Came here by searching for %meta_keyword%
п»їLately, I stumbled upon a useful resource regarding generic pills from India. It details WHO-GMP protocols when buying antibiotics. For those interested in cheaper alternatives, read this: п»їkisawyer.us.com. Worth a read.
Does anyone know getting antibiotics without prescription. I saw a verified blog that ranks trusted vendors: п»їhttps://polkcity.us.com/# mexican online pharmacies. What do you think?.
п»їRecently, I discovered a useful report regarding ordering meds from India. It covers how to save money on prescriptions. If you are looking for cheaper alternatives, go here: п»їhttps://kisawyer.us.com/# india pharmacy. It helped me.
п»їJust now, I discovered an informative page concerning cheap Indian generics. It covers WHO-GMP protocols when buying antibiotics. If you are looking for factory prices, check this out: п»їhttps://kisawyer.us.com/# online pharmacy india. Hope it helps.
신림셔츠룸 줄넘기
п»їLately, I discovered an informative report regarding ordering meds from Mexico. It covers FDA equivalents on prescriptions. In case you need Trusted pharmacy sources, visit this link: п»їUpstate Medical. It helped me.
ทดลองเล่นสล็อต pg
เกมสล็อตออนไลน์ ที่เติบโตอย่างต่อเนื่อง .
ปัจจุบันนี้ เกมสล็อต ออนไลน์ จัดเป็น เกมที่มีผู้เล่นจำนวนมาก ในตลาดเกมออนไลน์ ด้วย รูปแบบการเล่นที่เข้าใจง่าย ไม่ซับซ้อน และ สร้างความบันเทิงได้รวดเร็ว ทั้งผู้เล่นใหม่และผู้เล่นเดิม เกมสล็อต ก็เหมาะสม สำหรับการเล่นในระยะยาว.
ทำไม สล็อต ถึงได้รับความนิยม .
เกมสล็อตออนไลน์ มีจุดเด่นหลายด้าน เช่น เข้าใจง่าย ไม่ต้องใช้ทักษะซับซ้อน, มีธีมหลากหลาย และกราฟิกสวยงาม, สามารถเริ่มต้นด้วยเงินน้อย และ มีโบนัส พร้อมระบบฟรีสปิน. ดังนั้น สล็อต จึงกลายเป็น เกมอันดับต้น ๆ ในหมู่นักเล่น.
สล็อตเว็บตรง คืออะไร .
สล็อตเว็บตรง หมายถึง การเล่นสล็อตผ่านเว็บผู้ให้บริการโดยตรง โดยไม่ผ่านเอเย่นต์ ซึ่งช่วยให้ระบบมีความเสถียร. ข้อดีของสล็อตเว็บตรง ได้แก่ เข้าเกมได้ไว, ระบบปลอดภัย, ผลลัพธ์โปร่งใส และ มีสิทธิพิเศษเพิ่มเติม. นักเล่นส่วนใหญ่ นิยมเลือก เว็บตรง เพื่อความปลอดภัยในการเล่น.
ทดลองเล่น pg slot ก่อนเล่นจริง .
สำหรับผู้เล่นที่ต้องการทดลอง สามารถเลือก ทดลองเล่น pg ก่อนตัดสินใจ โดยเป็นโหมดเดโม ที่ไม่ต้องใช้เงินจริง. การทดลองเล่น ช่วยให้ผู้เล่น เข้าใจรูปแบบเกม, เข้าใจระบบโบนัส และ สามารถประเมินความคุ้มค่า เหมาะกับผู้เล่นใหม่ รวมถึงผู้ที่ต้องการเปรียบเทียบสล็อต.
ทำไม pg slot ถึงเป็นที่นิยม .
pg slot คือเกมสล็อต จากผู้พัฒนา PG ซึ่งมีชื่อเสียง ด้านคุณภาพเกม. ข้อดีของ PG Slot คือ ภาพสวย คมชัด, เล่นบนมือถือได้เต็มรูปแบบ, เกมไม่สะดุด และ โบนัสน่าสนใจ. ด้วยเหตุนี้ pg slot จึงได้รับความนิยมอย่างต่อเนื่อง ทั้งในเอเชียและทั่วโลก.
สรุป .
การเลือกเล่น สล็อต ผ่าน เว็บตรง ร่วมกับการใช้ ทดลอง pg slot และ เลือกเกมจาก pg slot ช่วยให้การเล่นมีความมั่นใจและสนุกมากขึ้น เหมาะสำหรับการเล่นระยะยาว.
п»їActually, I stumbled upon a helpful guide regarding Indian Pharmacy exports. It covers the manufacturing standards for generic meds. In case you need Trusted Indian sources, check this out: п»їcheck here. Cheers.
Мы изготавливаем дипломы любых профессий по приятным ценам. Купить диплом в Бийске — forum.7x.ru/member.php?u=16498
п»їJust now, I discovered an interesting resource about cheap Indian generics. It details CDSCO regulations when buying antibiotics. For those interested in cheaper alternatives, read this: п»їkisawyer.us.com. Might be useful.
п»їActually, I stumbled upon a great article concerning generic pills availability. It covers FDA equivalents when buying antibiotics. For those interested in affordable options, check this out: п»їhttps://polkcity.us.com/# mexicanrxpharm. Might be useful.
Диплом об образовании в СССР считался ключевым документом, который способствовал удачному поиску работы. Заказать диплом под заказ в столице возможно используя официальный портал компании. northland.forumex.ru/viewtopic.php?f=3&t=1835
Приобрести диплом о высшем образовании Никто не желает потерять годы жизни на то, чтобы заполучить знания, которые уже существуют. В результате решение купить официальный диплом о высшем образовании будет для вас самым оптимальным. И для этого вам следует сделать не так много — выбрать проверенную компанию, которая занимается изготовлением и продажей документов об образовании на заказ. Это позволит вам за небольшую сумму и в кратчайшие сроки получить документ из любого высшего учебного заведения страны: pc2163.com/viewtopic.php?t=392091
п»їTo be honest, I found a useful article about cheap Indian generics. The site discusses CDSCO regulations for ED medication. For those interested in factory prices, visit this link: п»їhttps://kisawyer.us.com/# Online medicine home delivery. Cheers.
I don’t know if it’s just me or if perhaps everyone else encountering problems with your blog. It seems like some of the text in your content are running off the screen. Can someone else please provide feedback and let me know if this is happening to them as well? This might be a issue with my web browser because I’ve had this happen previously. Many thanks
п»їActually, I came across an interesting resource concerning buying affordable antibiotics. It covers the manufacturing standards for ED medication. In case you need cheaper alternatives, visit this link: п»їkisawyer.us.com. It helped me.
If you want to save big on pills, you should try reading this archive. The site explains shipping costs. Best prices available here: п»їhttps://polkcity.us.com/# п»їmexican pharmacy.
п»їRecently, I stumbled upon a helpful report regarding Mexican Pharmacy standards. It covers FDA equivalents when buying antibiotics. If anyone wants affordable options, read this: п»їhttps://polkcity.us.com/# mexico prescriptions. Might be useful.
п»їLately, I stumbled upon an informative guide regarding cheap Indian generics. It covers WHO-GMP protocols when buying antibiotics. If anyone wants Trusted Indian sources, visit this link: п»їkisawyer.us.com. It helped me.
https://t.me/s/Officials_7K_casino
п»їActually, I found a great resource regarding cheap Indian generics. It covers WHO-GMP protocols for generic meds. If anyone wants reliable shipping to USA, go here: п»їhttps://kisawyer.us.com/# world pharmacy india. Cheers.
п»їActually, I found an interesting article concerning ordering meds from India. It covers CDSCO regulations when buying antibiotics. In case you need factory prices, read this: п»їhere. Cheers.
п»їTo be honest, I found an informative report regarding Indian Pharmacy exports. It details CDSCO regulations for generic meds. For those interested in cheaper alternatives, check this out: п»їindia online pharmacy. Worth a read.
п»їTo be honest, I came across an informative page about safe pharmacy shipping. It explains FDA equivalents for ED medication. For those interested in affordable options, read this: п»їpolkcity.us.com. It helped me.
WOW just what I was searching for. Came here by searching for %keyword%
Do you have a spam problem on this site; I also am a blogger, and I was
wondering your situation; many of us have created some nice practices and we are looking
to trade solutions with other folks, why not shoot
me an e-mail if interested.
п»їActually, I found a helpful page about cheap Indian generics. The site discusses the manufacturing standards for ED medication. If you are looking for cheaper alternatives, go here: п»їkisawyer.us.com. It helped me.
п»їLately, I discovered a useful resource concerning cheap Indian generics. It details the manufacturing standards for generic meds. If you are looking for factory prices, read this: п»їindian pharmacies safe. It helped me.
Try your luck and enjoy the exciting game onSwiminator Slot, which will give you a sea of ??pleasure and bonuses.
Swiminator Slot: An Overview
п»їLately, I came across a useful page concerning ordering meds from India. It details how to save money when buying antibiotics. For those interested in cheaper alternatives, take a look: п»їtop online pharmacy india. Good info.
Stop overpaying and save on pharmacy costs, I suggest reading this page. The site explains trusted Mexican pharmacies. Huge savings at this link: п»їpolkcity.us.com.
п»їRecently, I found a great resource about ordering meds from Mexico. It covers FDA equivalents when buying antibiotics. If you are looking for reliable shipping to USA, go here: п»їvisit. Might be useful.
п»їLately, I came across a useful resource concerning buying affordable antibiotics. It details WHO-GMP protocols when buying antibiotics. If you are looking for cheaper alternatives, go here: п»їkisawyer.us.com. It helped me.
п»їActually, I found an interesting article about Mexican Pharmacy standards. The site discusses regulations for ED medication. In case you need reliable shipping to USA, go here: п»їpolkcity.us.com. Good info.
Visit 777 bet and dive into the world of gambling with unique offers!
Its intuitive design and diverse game offerings are likely reasons for its expanding popularity.
http://www.google.by/url?q=https://t.me/officials_7k/634
п»їTo be honest, I came across an informative report regarding ordering meds from India. It covers WHO-GMP protocols when buying antibiotics. In case you need Trusted Indian sources, visit this link: п»їindia online pharmacy. Hope it helps.
Sharing, a helpful analysis on FDA equivalent standards. It explains the best shipping methods for generics. You can read it here: п»їpolkcity.us.com.
If some one needs expert view on the topic of blogging after that i recommend him/her to go to see this web site, Keep up the nice work.
Hmm it seems like your site ate my first comment (it was extremely long) so I guess I’ll just
sum it up what I wrote and say, I’m thoroughly enjoying your
blog. I too am an aspiring blog writer but I’m still new to everything.
Do you have any helpful hints for beginner blog writers?
I’d genuinely appreciate it.
п»їJust now, I found an informative report about Indian Pharmacy exports. It covers WHO-GMP protocols for generic meds. In case you need cheaper alternatives, check this out: п»їindian pharmacy paypal. Worth a read.
п»їJust now, I found a useful article regarding cheap Indian generics. It details WHO-GMP protocols on prescriptions. For those interested in reliable shipping to USA, check this out: п»їkisawyer.us.com. Might be useful.
п»їJust now, I came across a useful guide regarding cheap Indian generics. The site discusses the manufacturing standards for generic meds. For those interested in factory prices, read this: п»їinformation. Might be useful.
п»їRecently, I discovered a great resource concerning cheap Indian generics. It details WHO-GMP protocols for generic meds. In case you need cheaper alternatives, check this out: п»їindian pharmacy paypal. Cheers.
п»їActually, I discovered a helpful article about buying affordable antibiotics. It covers WHO-GMP protocols when buying antibiotics. In case you need cheaper alternatives, take a look: п»їhttps://kisawyer.us.com/# top 10 pharmacies in india. Worth a read.
Heads up, a helpful overview on Mexican Pharmacy safety. The author describes how to avoid scams for ED meds. Full info: п»їhttps://polkcity.us.com/# pharma mexicana.
п»їTo be honest, I came across an informative resource about ordering meds from India. It explains WHO-GMP protocols for generic meds. If anyone wants reliable shipping to USA, read this: п»їtop 10 online pharmacy in india. Hope it helps.
Quick question about getting antibiotics without prescription. I ran into a verified archive that reviews affordable options: п»їUpstate Medical. Looks legit.
Does anyone know getting antibiotics without prescription. I found a cool blog that reviews trusted vendors: п»їinformation. Any thoughts?.
If you want to save on pharmacy costs, you should try reading this report. The site explains trusted Mexican pharmacies. Discounted options available here: п»їmexico city pharmacy.
п»їJust now, I stumbled upon a helpful guide concerning cheap Indian generics. The site discusses how to save money when buying antibiotics. In case you need reliable shipping to USA, visit this link: п»їhttps://kisawyer.us.com/# indian pharmacy. Cheers.
п»їTo be honest, I stumbled upon an interesting report regarding ordering meds from India. It details WHO-GMP protocols for generic meds. If anyone wants factory prices, take a look: п»їhere. Might be useful.
п»їTo be honest, I found a useful guide regarding generic pills from India. The site discusses CDSCO regulations when buying antibiotics. If you are looking for cheaper alternatives, check this out: п»їcheck here. Cheers.
п»їActually, I discovered a great guide about buying affordable antibiotics. It covers WHO-GMP protocols on prescriptions. If anyone wants reliable shipping to USA, check this out: п»їofficial site. Cheers.
Подключение модуля nRF24L01 к Arduino — MicroPi
https://www.iochatto.com/trucchi-happy-aquarium-train-tricks/4624/
Подключение модуля nRF24L01 к Arduino — MicroPi
https://english.sumantv.com/chiranjeevi-lifestyle-net-worth-family-car-collection/
п»їRecently, I discovered a useful resource regarding ordering meds from Mexico. It explains regulations when buying antibiotics. If you are looking for Trusted pharmacy sources, read this: п»їpolkcity.us.com. Worth a read.
п»їTo be honest, I came across an informative page concerning cheap Indian generics. The site discusses CDSCO regulations for generic meds. In case you need Trusted Indian sources, read this: п»їhttps://kisawyer.us.com/# indian pharmacy paypal. Cheers.
п»їTo be honest, I came across an informative report concerning Indian Pharmacy exports. The site discusses CDSCO regulations for generic meds. If you are looking for reliable shipping to USA, read this: п»їhttps://kisawyer.us.com/# pharmacy website india. It helped me.
For those looking to save big on pills, you should try checking this report. The site explains prices for generics. Huge savings found here: п»їhttps://polkcity.us.com/# pharmacy in mexico.
п»їActually, I stumbled upon a great resource regarding cheap Indian generics. It details CDSCO regulations on prescriptions. If anyone wants reliable shipping to USA, take a look: п»їhttps://kisawyer.us.com/# buy medicines online in india. Cheers.
п»їTo be honest, I found a useful report regarding generic pills from India. It explains how to save money for generic meds. For those interested in reliable shipping to USA, take a look: п»їvisit. Worth a read.
Quick question about safe Mexican pharmacies. I found a cool post that lists affordable options: п»їsource. What do you think?.
п»їTo be honest, I stumbled upon an informative guide about generic pills from India. It explains WHO-GMP protocols on prescriptions. In case you need factory prices, read this: п»їindia pharmacy. Good info.
To save on pharmacy costs, I suggest visiting this page. The site explains shipping costs. Discounted options found here: п»їUpstate Medical.
п»їRecently, I came across a helpful resource concerning ordering meds from India. The site discusses how to save money for ED medication. In case you need reliable shipping to USA, go here: п»їbest online pharmacy india. Cheers.
п»їJust now, I came across an informative guide about generic pills from India. It covers the manufacturing standards when buying antibiotics. For those interested in reliable shipping to USA, check this out: п»їhttps://kisawyer.us.com/# india pharmacy mail order. Cheers.
п»їLately, I came across an interesting article regarding ordering meds from Mexico. It details FDA equivalents for generic meds. If you are looking for affordable options, check this out: п»їlos algodones pharmacy online. Might be useful.
п»їActually, I stumbled upon an interesting article concerning ordering meds from India. The site discusses WHO-GMP protocols for generic meds. If you are looking for Trusted Indian sources, check this out: п»їhttps://kisawyer.us.com/# best india pharmacy. Might be useful.
п»їLately, I found an interesting report about generic pills availability. It details FDA equivalents for generic meds. If anyone wants affordable options, read this: п»їpolkcity.us.com. Worth a read.
п»їActually, I came across a useful page concerning ordering meds from India. The site discusses the manufacturing standards for ED medication. For those interested in factory prices, visit this link: п»їhttps://kisawyer.us.com/# indian pharmacies safe. Good info.
п»їTo be honest, I stumbled upon a great report regarding generic pills from India. It details how to save money when buying antibiotics. For those interested in factory prices, go here: п»їhttps://kisawyer.us.com/# reputable indian online pharmacy. Good info.
Just wanted to share, an official overview on FDA equivalent standards. It breaks down pricing differences for generics. Source: п»їhttps://polkcity.us.com/# best mexican pharmacy.
п»їTo be honest, I found an informative resource concerning buying affordable antibiotics. It explains CDSCO regulations when buying antibiotics. For those interested in Trusted Indian sources, visit this link: п»їkisawyer.us.com. Might be useful.
п»їRecently, I came across an interesting article regarding cheap Indian generics. The site discusses CDSCO regulations when buying antibiotics. In case you need factory prices, check this out: п»їthis site. Worth a read.
п»їRecently, I came across an informative report concerning generic pills from India. The site discusses the manufacturing standards for generic meds. In case you need factory prices, take a look: п»їkisawyer.us.com. Good info.
Лучшие нейросети для улучшения текста
Has anybody tried ordering meds from Mexico. I found a cool site that compares affordable options: п»їhttps://polkcity.us.com/# phentermine in mexico pharmacy. What do you think?.
Мы изготавливаем дипломы любых профессий по разумным ценам. Купить диплом в Новотроицке — rossensor.ru/forum/?PAGE_NAME=profile_view&UID=44448
п»їTo be honest, I stumbled upon a useful guide regarding ordering meds from Mexico. It explains the safety protocols when buying antibiotics. If anyone wants affordable options, read this: п»їhttps://polkcity.us.com/# is mexipharmacy legit. It helped me.
Wow, incredible blog format! How long have you ever been running a blog for? you make running a blog glance easy. The whole look of your site is excellent, as smartly as the content material!
п»їActually, I discovered a great resource about cheap Indian generics. The site discusses CDSCO regulations when buying antibiotics. If anyone wants cheaper alternatives, check this out: п»їkisawyer.us.com. Hope it helps.
For those looking to save money on prescriptions, I suggest reading this archive. It reveals trusted Mexican pharmacies. Best prices available here: п»їpolkcity.us.com.
п»їActually, I found a helpful article about Indian Pharmacy exports. It explains WHO-GMP protocols on prescriptions. For those interested in reliable shipping to USA, take a look: п»їkisawyer.us.com. Good info.
If you want to save money on prescriptions, I recommend reading this page. The site explains shipping costs. Discounted options available here: п»їhttps://polkcity.us.com/# pharmacy delivery.
FYI, a helpful guide on buying meds safely. It breaks down how to avoid scams for generics. Link: п»їhttps://polkcity.us.com/# mexican pharmacies that ship to us.
п»їRecently, I found an informative report about generic pills from India. It explains the manufacturing standards for generic meds. For those interested in factory prices, check this out: п»їread more. Worth a read.
Лучшие нейросети для определения ударения
Immerse yourself in the world of exciting games and big wins with spingo88 on spingo88!
The platform known as Spingo88 has rapidly gained popularity among online gamers.
Try your luck with jili casino and win a big prize today!
The availability of bonuses adds to the fun and winning possibilities on the platform.
п»їTo be honest, I found an interesting article about buying affordable antibiotics. It covers CDSCO regulations when buying antibiotics. If anyone wants cheaper alternatives, read this: п»їfollow. Good info.
п»їTo be honest, I came across a helpful article concerning generic pills from India. It covers WHO-GMP protocols for ED medication. For those interested in reliable shipping to USA, take a look: п»їinformation. It helped me.
Купить диплом любого университета поможем. Купить диплом техникума, колледжа в Омске — diplomybox.com/kupit-diplom-tekhnikuma-kolledzha-v-omske
п»їLately, I came across an informative page concerning Indian Pharmacy exports. It details WHO-GMP protocols on prescriptions. If anyone wants cheaper alternatives, take a look: п»їkisawyer.us.com. Good info.
п»їLately, I stumbled upon an interesting resource concerning buying affordable antibiotics. It explains the manufacturing standards for generic meds. For those interested in reliable shipping to USA, visit this link: п»їcheck it out. It helped me.
п»їRecently, I stumbled upon a useful guide regarding ordering meds from India. It explains the manufacturing standards on prescriptions. If anyone wants factory prices, read this: п»їkisawyer.us.com. Cheers.
Does anyone know safe Mexican pharmacies. I found a decent post that ranks affordable options: п»їhttps://polkcity.us.com/# mexican pharmacies near me. Any thoughts?.
777 bet online casino and dive into the world of gambling with unique offers!
In recent years, the landscape of online gambling has changed considerably.
п»їRecently, I came across a helpful resource regarding generic pills from India. The site discusses CDSCO regulations when buying antibiotics. For those interested in Trusted Indian sources, visit this link: п»їread more. Worth a read.
п»їLately, I discovered a great article about ordering meds from India. It covers the manufacturing standards when buying antibiotics. If you are looking for Trusted Indian sources, visit this link: п»їkisawyer.us.com. Might be useful.
п»їLately, I discovered a useful page about Indian Pharmacy exports. The site discusses how to save money when buying antibiotics. For those interested in Trusted Indian sources, take a look: п»їkisawyer.us.com. It helped me.
п»їTo be honest, I came across an interesting article about Mexican Pharmacy standards. It explains how to save money when buying antibiotics. In case you need reliable shipping to USA, check this out: п»їpolkcity.us.com. Good info.
п»їTo be honest, I came across a great guide concerning cheap Indian generics. It details CDSCO regulations for generic meds. If anyone wants factory prices, go here: п»їhttps://kisawyer.us.com/# top online pharmacy india. It helped me.
п»їJust now, I discovered a great report concerning ordering meds from India. It covers how to save money for ED medication. If anyone wants cheaper alternatives, visit this link: п»їhttps://kisawyer.us.com/# top 10 online pharmacy in india. Worth a read.
Hi to every one, it’s truly a good for me to go to see this site, it consists of important Information.
Heads up, a detailed overview on buying meds safely. The author describes how to avoid scams for ED meds. Link: п»їп»їclick here.
FYI, an important article on Mexican Pharmacy safety. The author describes the best shipping methods for ED meds. Source: п»їmexi pharmacy.
Check out our new game on alo789 com, to try your luck and win big prizes!
Alo789’s Commitment to Security and Integrity
Excellent article. I will be dealing with a few of these issues as well..
п»їRecently, I found a useful page regarding safe pharmacy shipping. It covers the safety protocols when buying antibiotics. If you are looking for cheaper alternatives, go here: п»їhttps://polkcity.us.com/# pharmacy online. Hope it helps.
п»їActually, I discovered a helpful report about buying affordable antibiotics. The site discusses the manufacturing standards on prescriptions. If you are looking for factory prices, visit this link: п»їhttps://kisawyer.us.com/# mail order pharmacy india. Worth a read.
п»їRecently, I stumbled upon a great resource regarding Mexican Pharmacy standards. It details FDA equivalents for generic meds. If you are looking for cheaper alternatives, take a look: п»їonline pharmacy. Good info.
п»їActually, I found a useful page regarding ordering meds from India. It covers WHO-GMP protocols for ED medication. If you are looking for reliable shipping to USA, go here: п»їkisawyer.us.com. Hope it helps.
Discover the best slot machines with mrlucky88 online.
As mrlucky88 continues growing, the impact on the gaming world deepens.
Try your luck in jili spin casino and enjoy exciting slots from Jili!
Upon entering the game, participants turn the wheels to connect icons on the winning lines.
п»їRecently, I stumbled upon a great report concerning ordering meds from India. It covers CDSCO regulations when buying antibiotics. For those interested in Trusted Indian sources, take a look: п»їthis site. Might be useful.
п»їRecently, I came across a great article concerning buying affordable antibiotics. It explains WHO-GMP protocols on prescriptions. If anyone wants cheaper alternatives, go here: п»їkisawyer.us.com. It helped me.
п»їTo be honest, I discovered a helpful resource about Indian Pharmacy exports. The site discusses WHO-GMP protocols for ED medication. If anyone wants reliable shipping to USA, take a look: п»їindian pharmacy online. Cheers.
Has anybody tried safe Mexican pharmacies. I ran into a decent blog that ranks trusted vendors: п»їonline mexico pharmacy. Seems useful..
п»їJust now, I came across an interesting article concerning generic pills availability. It explains FDA equivalents for ED medication. If you are looking for affordable options, visit this link: п»їpolkcity.us.com. Good info.
Immerse yourself in the world of excitement and winnings withvalorcasino,where every spin brings pleasure and a chance to win a big jackpot.
Valor Casino represents a top-tier venue for gamblers looking for thrilling experiences and elegant surroundings.
п»їTo be honest, I found a helpful report about ordering meds from India. It details the manufacturing standards for ED medication. If you are looking for cheaper alternatives, check this out: п»їkisawyer.us.com. It helped me.
Sharing, a detailed guide on buying meds safely. It explains how to avoid scams for antibiotics. Source: п»їhttps://polkcity.us.com/# the purple pharmacy mexico.
п»їActually, I came across an interesting resource regarding cheap Indian generics. It details the manufacturing standards on prescriptions. In case you need cheaper alternatives, check this out: п»їkisawyer.us.com. It helped me.
п»їActually, I found an interesting guide regarding ordering meds from India. It explains WHO-GMP protocols for ED medication. For those interested in cheaper alternatives, visit this link: п»їkisawyer.us.com. It helped me.
Stop overpaying and save money on prescriptions, I recommend checking this report. It shows shipping costs. Best prices found here: п»їUpstate Medical.
I was wondering about safe Mexican pharmacies. I found a cool post that lists safe places: п»їfollow. Seems useful..
п»їJust now, I stumbled upon an interesting article regarding buying affordable antibiotics. It covers CDSCO regulations for ED medication. If you are looking for cheaper alternatives, take a look: п»їhttps://kisawyer.us.com/# top 10 online pharmacy in india. Might be useful.
You should be a part of a contest for one of the best sites on the net. I’m going to recommend this web site!
п»їTo be honest, I discovered an informative report about ordering meds from India. It details WHO-GMP protocols for generic meds. If anyone wants cheaper alternatives, visit this link: п»їhttps://kisawyer.us.com/# buy medicines online in india. Hope it helps.
п»їRecently, I found an informative page concerning cheap Indian generics. It covers CDSCO regulations when buying antibiotics. In case you need cheaper alternatives, visit this link: п»їkisawyer.us.com. Cheers.
п»їJust now, I came across a helpful article concerning ordering meds from Mexico. It covers regulations when buying antibiotics. If anyone wants Trusted pharmacy sources, read this: п»їsource. Might be useful.
download melbet app https://melbet5006.ru/
п»їTo be honest, I came across a useful guide regarding ordering meds from India. It explains WHO-GMP protocols for generic meds. If anyone wants Trusted Indian sources, take a look: п»їtop online pharmacy india. Cheers.
For those looking to save cash on meds, you should try checking this resource. It reveals trusted Mexican pharmacies. Best prices found here: п»їhttps://polkcity.us.com/# prescriptions from mexico.
п»їJust now, I stumbled upon an interesting resource about buying affordable antibiotics. It details the manufacturing standards on prescriptions. If anyone wants reliable shipping to USA, check this out: п»їkisawyer.us.com. Might be useful.
Лучшие нейросети для автоматизации обучения
п»їLately, I found an informative page concerning Indian Pharmacy exports. It covers WHO-GMP protocols for generic meds. If anyone wants reliable shipping to USA, go here: п»їhttps://kisawyer.us.com/# best india pharmacy. Might be useful.
FYI, a helpful analysis on Mexican Pharmacy safety. The author describes quality control for antibiotics. You can read it here: п»їpolkcity.us.com.
п»їLately, I stumbled upon a great page concerning buying affordable antibiotics. It details WHO-GMP protocols for ED medication. If you are looking for factory prices, read this: п»їsee more. Worth a read.
п»їJust now, I found a useful article regarding buying affordable antibiotics. It explains how to save money for generic meds. If you are looking for Trusted Indian sources, go here: п»їtop 10 online pharmacy in india. Cheers.
Stop overpaying and save on pharmacy costs, you should try checking this report. The site explains where to buy cheap. Discounted options found here: п»їpharmacys in mexico.
п»їJust now, I found a great resource about buying affordable antibiotics. It covers CDSCO regulations when buying antibiotics. If you are looking for Trusted Indian sources, check this out: п»їclick to read. Might be useful.
п»їRecently, I found a great guide about cheap Indian generics. It explains the manufacturing standards on prescriptions. If anyone wants factory prices, visit this link: п»їpharmacy website india. Hope it helps.
п»їTo be honest, I discovered an informative resource concerning generic pills from India. It explains WHO-GMP protocols on prescriptions. If you are looking for cheaper alternatives, read this: п»їlink. Hope it helps.
Very descriptive blog, I liked that a lot. Will there be a part 2?
FYI, a helpful article on Mexican Pharmacy safety. The author describes pricing differences for antibiotics. Source: п»їpolkcity.us.com.
п»їTo be honest, I stumbled upon a great article about buying affordable antibiotics. The site discusses CDSCO regulations when buying antibiotics. In case you need factory prices, go here: п»їvisit. Might be useful.
Its like you learn my thoughts! You appear to know so much about this, like you wrote
the e book in it or something. I think that you simply can do with some
% to force the message house a bit, however instead of that, this is great
blog. An excellent read. I’ll certainly be back.
Мы готовы предложить дипломы любой профессии по разумным ценам. Стоимость может зависеть от выбранной специальности, года выпуска и ВУЗа: everestrolep.listbb.ru/viewtopic.php?f=2&t=43604
Мы изготавливаем дипломы любых профессий по приятным тарифам. Заказать диплом об образовании olbika.com/kirstenbiaggin
Мы изготавливаем дипломы любой профессии по доступным ценам. Диплом об окончании института в СССР считался ключевым документом, способствовавшим быстрому и удачному трудоустройству. Приобрести диплом о высшем образовании!: epsughana.org/2025/diplom-za-korotkij-srok-sroki-ceny-uslovija-367
Приобрести диплом университета по выгодной цене возможно, обращаясь к проверенной специализированной фирме. Для проверки компании перед заказом пользуйтесь отзывами других клиентов на форумах. Так можно купить диплом из любого института РФ girlscools.ru/kupit-diplom-kosmetologa-polnostyu-ofitsialno
п»їJust now, I found a helpful guide concerning ordering meds from India. The site discusses the manufacturing standards for generic meds. In case you need factory prices, check this out: п»їhttps://kisawyer.us.com/# Online medicine order. Cheers.
п»їActually, I discovered a great report regarding generic pills from India. It explains CDSCO regulations for generic meds. In case you need factory prices, visit this link: п»їkisawyer.us.com. Good info.
п»їJust now, I stumbled upon a helpful report concerning buying affordable antibiotics. It details how to save money on prescriptions. For those interested in cheaper alternatives, read this: п»їhttps://kisawyer.us.com/# top 10 pharmacies in india. Cheers.